Trabajo de Analisis Estructural
29
1 3. METODO DE ANGULO DE GIRO Y DEFLEXION
-
Upload
cuba-cueva-eder -
Category
Documents
-
view
16 -
download
0
Transcript of Trabajo de Analisis Estructural
1
3. METODO DE ANGULO DE GIRO Y DEFLEXION
2
TEORIA:
Se dijo que Mohr fue el precursor de este método, al aplicarlo en 1982 a la solución de un problema de esfuerzos secundarios.
Parece llamo poco la atención y solo en 1915 G.A Maney, profesor de la universidad de Minnesota, presento un desarrollo independiente del mismo. Se utilizó ampliamente antes de la aparición del Método de Cross y ha vuelto a ganar aceptación por la facilidad de resolver sistemas grandes de ecuaciones mediante la computadora digital.
La esencia del método de Ángulos de giro y deflexión radica en relacionar tales cambios geométricos con los momentos que actúan sobre los nudos. Al aplicar las condiciones de equilibrio a cada nudo y resolver el sistema de ecuaciones resultante, se obtiene la solución del problema.
- Se parte del supuesto de conexiones rígidas y, como se dijo antes, las rotaciones y desplazamientos de los nudos se consideran como incógnitas.
- Ahora bien, para que haya equilibrio la suma de los momentos en los extremos de los elementos que se encuentran en un nudo debe ser cero, y esta condición, aplicada sucesivamente a todos los nudos.
En la figura 3.1 (a) se presenta aislado un miembro de un pórtico antes de ser sometido a carga y en la (b) el mismo miembro después de deformarse por las cargas impuestas sobre el pórtico.
Se han dibujado las cargas externas que actúan sobre el miembro y los momentos que se han desarrollado en sus extremos por la acción de todas las cargas del pórtico. A estos momentos de les denomina Mi y Mj.
Se estudia el efecto el giro en cada nudo y finalmente el de su desplazamiento relativo, normal al eje del miembro en su posición original, todos ellos independientemente unos de otros. Aplicando entonces el principio de superposición se obtiene:
Estas ecuaciones son completamente generales, si se exceptúa la simplificación señalada antes. En ellas:

3
c) Efecto de las cargas sobre el miembro
d) Efecto del giro en el nudo i
e) Efecto del giro en el nudo j
f) Efecto del desplazamiento relativo /
Figura 3.1 Deducción de las ecuaciones de Ángulos de giro y deflexión.

4
Momento definitivo en el nudo i.
Momento de empotramiento en el nudo i, causado por las cargas aplicadas sobre el miembro ij.
Momento en el nudo i que causa un giro de θi en dicho nudo.
Momento en el nudo i que surge por la aplicación de un momento M`jj en el nudo j.
Momento en el nudo i causado por un desplazamiento relativo Δ entre los extremos del miembro ij.
Momento definitivo en el nudo j.
Momento de empotramiento en el nudo j, causado por las cargas aplicadas sobre el miembro ij.
Momento en el nudo j que surge por la aplicación de un momento M`ii en el nudo i.
Momento en el nudo j que causa un giro θj en dicho nudo.
Momento en el nudo j causado por un desplazamiento relativo Δ entre los extremos del miembro ij.
- En el caso de elementos prismáticos, las evaluaciones de los términos anteriores se puede hacer fácilmente utilizando las vigas conjugadas de las figuras. 3.1 (c) a (f). Considerando la primera y tomando momento con respecto al punto 2, resulta:
Tomando ahora momentos con respecto al punto I, se obtiene.
Procediendo de manera similar con la figura (e), se obtiene:
Considerando ahora la figura (f) es evidente que por equilibrio de fuerzas verticales:
Y aplicando el segundo teorema de la viga conjugada:

5
Finalmente remplazando las ecuaciones (3.1) y (3.2) los valores encontrados, se obtiene:
Que son las ecuaciones de Ángulos de giro de deflexión buscada.
Al término I/L se le denomina rigidez relativa y se le designa con la letra K. utilizando esta nomenclatura en las ecuaciones (3.8) y (3.9), y factor izando, se llega a una forma alterna:
EJEMPLO DE APLICACIÓN:
- Resuelva, mediante las ecuaciones de Ángulos de giro y deflexión la viga de sección constante mostrada.
Solución:
Si no interesa averiguar la magnitud verdadera de los giros, puede tomarse E = 1 y utilizar un Io de referencia. Suponiéndolo igual a 10:
Mediante la tabla 3.1 se encuentran los momentos de empotramiento:

6
McD es conocido por tratarse de un voladizo:
Las condiciones de los apoyos son tales que:
Por continuidad,
Y si los apoyos no ceden todos los = 0. Aplicando ahora las ecuaciones (3.8a) y (3.9 a) al tramo AB, resulta:
Pasando ahora al tramo BC, se Obtiene similarmente:
Aplicando ahora la condición de equilibrio:
∑ Mij = 0 a los nudos B y C:
Nudo B:
Y remplazando los valores respectivos de las ecuaciones (3) y (4) se llega a:
… (6)
Para el nudo C:
Remplazando los valores de las ecuaciones (5) y (1) resulta:
Restándole a la ecuación (7) dos veces la ecuación (6):
Y remplazando este valor en la ecuación (6):

7
Volviendo ahora a las ecuaciones (2) a (5) se obtiene:
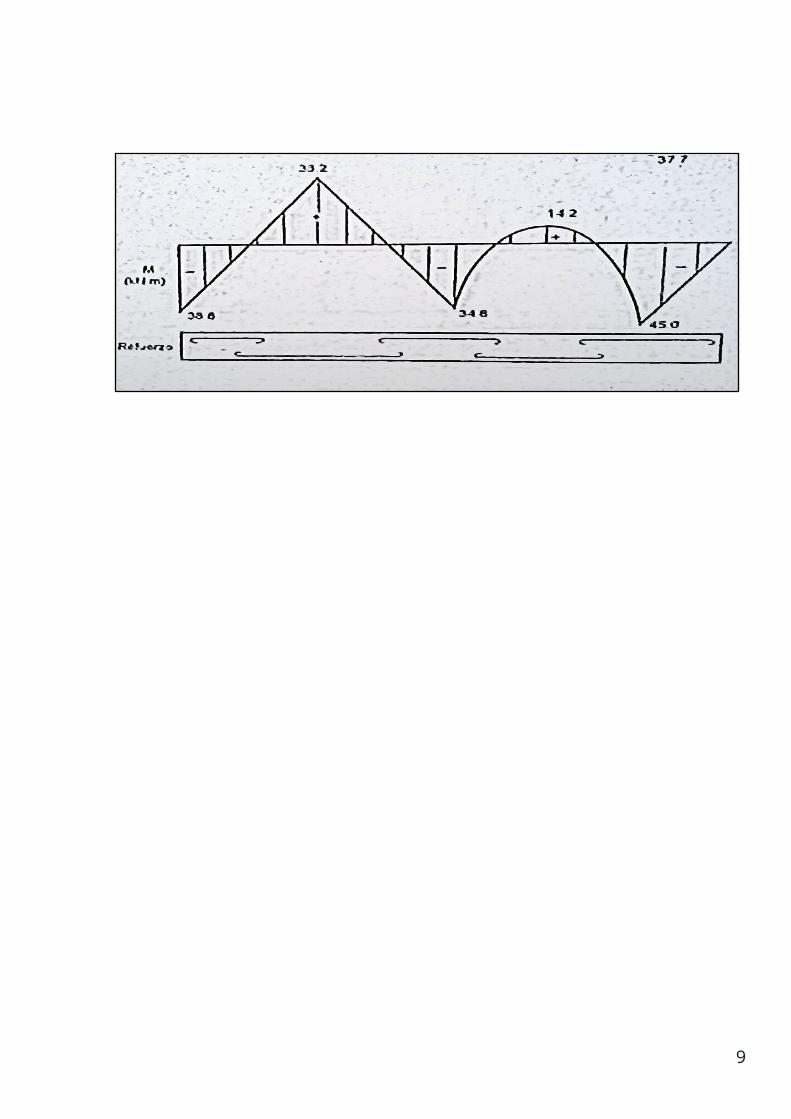
Conocidos los momentos se pueden evaluar las reacciones y momentos máximos positivos. Con estos valores se pueden dibujar los diagramas de corte, momento y refuerzo:

8
4. METODO DE KANI
9
4.1 TEORIA:
El método tradicional para analizar pórticos con desplazamiento, mediante distribución de momentos, se vuelve sumamente engorroso para estructuras de muchos grados de libertad, tales como los edificios para oficinas o apartamentos corrientes.
Afortunadamente para soluciones manuales se habían desarrollado antes de la generalización de la computación electrónica otros métodos más sencillos, aplicables a vigas continuas y pórticos ortogonales, principalmente los de KANI y TAKABEYA. Estos métodos también son fácilmente probables, de ahí la popularidad que llegaron a alcanzar. En parte de estudiara el primero de ellos, o sea el de Kani.
4.2 VENTAJAS DEL METODO DE KANI:
Kani hace hincapié en que su método ofrece las siguientes ventajas:
- Se trata de un de aproximación sucesivas y, en consecuencia, las respuestas se pueden lograr con la exactitud que se desee, mientras las hipótesis fundamentales y los datos básicos lo permitan.
- La inclusión de los efectos de desplazamiento se hace en forma muy simple. - La formulación del procedimiento conduce a una eliminación prácticamente
automática de los errores ocasionales.- Es muy fácil verificar en cualquier nudo la bondad de los resultados.- Los cambios eventuales de cargas o dimensiones en cualquier elemento se
pueden tener en cuenta con muy poco esfuerzo adicional.- No es difícil de aplicar estructuras con miembros a cartelados.
Podría decirse que la única desventaja es que su aplicación esta limitada a pórticos ortogonales y que no incluye los efectos de los acortamientos axiales, que se hacen cada vez mas importantes al incrementar el numero de pisos a los niveles corrientes en las torres de nuestros días.
4.3 CASO DE ESTRUCTURAS SIN DESPLAZAMIENTO:
La deducción de las formulas básicas para el tratamiento de las estructuras sin desplazamiento relativo de sus extremos es completamente análoga a la vista anteriormente en los métodos de Ángulos de giro y deflexión y Cross; solamente existen ligeros cambios en nomenclatura, como se anota a continuación.
Se considera que en el estado final del elemento se alcanza mediante la superposición de tres efectos: - El de las cargas considerando empotramiento en los nudos.- El efecto del giro en el nudo i.- El efecto en el nudo j.

10
Los momentos señalados en las siguientes figuras
Figura 4.1 Elemento sin desplazamiento relativo de sus extremos.
Se podrá reconocer que en tal caso:
2M (4.1)
M (4.2)
O sea, lo que se había llamado Mi y Mj, respectivamente, en las ecuaciones (6.8) y (6.60) del método de Cross.
Aplicando el principio de superposición a la figura 4.1, se obtiene entonces:
(4.3)
( (4.4)
Considerando ahora un nudo i de la estructura y todos los elementos conectados en el, el equilibrio del nudo exige que:
Y al utilizar la ecuación (4.3):
(4.5)

11
Definiendo ahora el Momento de fijación del nudo, , como la sumatoria de los momentos de empotramiento en los extremos de los elementos que ocurren a él. O sea:
(4.6)
Y reordenando la ecuación (7.5), se obtiene:
(4.7)
Y ahora bien las ecuaciones (4.1) y (4.2) muestran que los momentos debidos al giro con proporcionales no solo a la magnitud de este sino también a la rigidez del elemento involucrado es decir:
(4.8)
De tal manera que si todos los elementos que concurren al nudo i tienen condiciones similares de apoyo en su otro extremo, la constante de proporcionalidad, α será idéntica y podrá escribirse la siguiente proporción:
(4.9)
En que se ha utilizado el supuesto de nudo rígido y, por consiguiente, el mismo valor de θi para todos los elementos.
Remplazando en esta ecuación el valor dado por la ecuación (4.7) y despejando, se llega a:
(4.10)
Y definiendo el coeficiente de giro, uij, como:
(4.11)
La expresión anterior se puede escribir así:
(4.12)

12
4.4 ESTRUCTURAS SIN DESPLAZAMIENTO CON EXTREMOS ARTICULADOS:
En la deducción de la ecuación (4.9), se considero que todos los elementos unidos en el nudo i tenían condiciones similares de apoyo en el extremo opuesto. Si este no es el caso, se tendrá para algunos elementos que:
(
Mientras que para otros:
En donde β = a1/a0 es la relación que existe entre los coeficientes de las rigideces
absolutas de los elementos involucrados. Esta última expresión se puede rescribir como:
- En donde K` ik represente aña rigidez modificada del elemento en condiciones diferentes.
- Empleando dicha rigidez modificada, resulta de nuevo la ecuación (7.9) pero en términos de K`ij.
- Para los elementos con extremo o opuesto empotrado, obviamente K`ij es igual ya que ellos β vale uno.
Ilustrando esto para un elemento prismático se recordara que:
Para el mismo elemento pero con extremo articulado:
Por consiguiente:
O sea, que bastara tomar como rigidez modificada tres cuartas partes de la rigidez real, que coincide con lo que se había hecho en el método de Cross.
4.5 PÒRTICOS CON NUDOS DESPLAZABLES EN SENTIDO HORIZONTAL: CARGAS HORIZONTALES UNICAMENTE EN LOS NUDOS
- Cuando los pórticos no son simétricos en geometría y cargas, o cuando están sometido a fuerzas horizontales, sufrirán desplazamientos nodales a menos que estos estén impedidos por n arriostra miento adecuado.

13
Figura: 4.2 Efecto del desplazamiento
Y planteando equilibrio en un nudo:
De donde se obtiene:
Y por un raciocinio similar al visto antes en la deducción (4.12) se obtiene, suponiendo condiciones de apoyo similares, el valor del momento por giro en el caso de desplazamiento:
Recordando ahora el equilibrio de fuerzas horizontales en cualquier piso y suponiendo que las cargas actúan a nivel de placa según se indica en la figura 4.3:
Figura: 4.3 Equilibrio de fuerzas horizontales en el piso n.

14
4.6. PORTICOS CON DESPLAZAMIENTO HORIZONTAL DE LOS NUDOS Y COLUMNAS ARTICULADAS EN LA BASE:
Planteando el equilibrio en los nudos superiores de las columnas y remplazando estas por otras equivalentes con unos k` iguales a las tres cuartas partes de las K originales se llega como antes a la expresión:
Figura: 4.4 Pórtico con columnas articuladas en la base.

15
EJEMPLO DE APLICACIÓN
- Analice el pórtico mostrado, utilizando el método de KANI.
Solución:
Este problema como referencia se tiene:
Por la parte:
Coeficientes de giro:
Nudo B
∑ = - 0.500 β
Nudo C
∑ = - 0.500 β

16
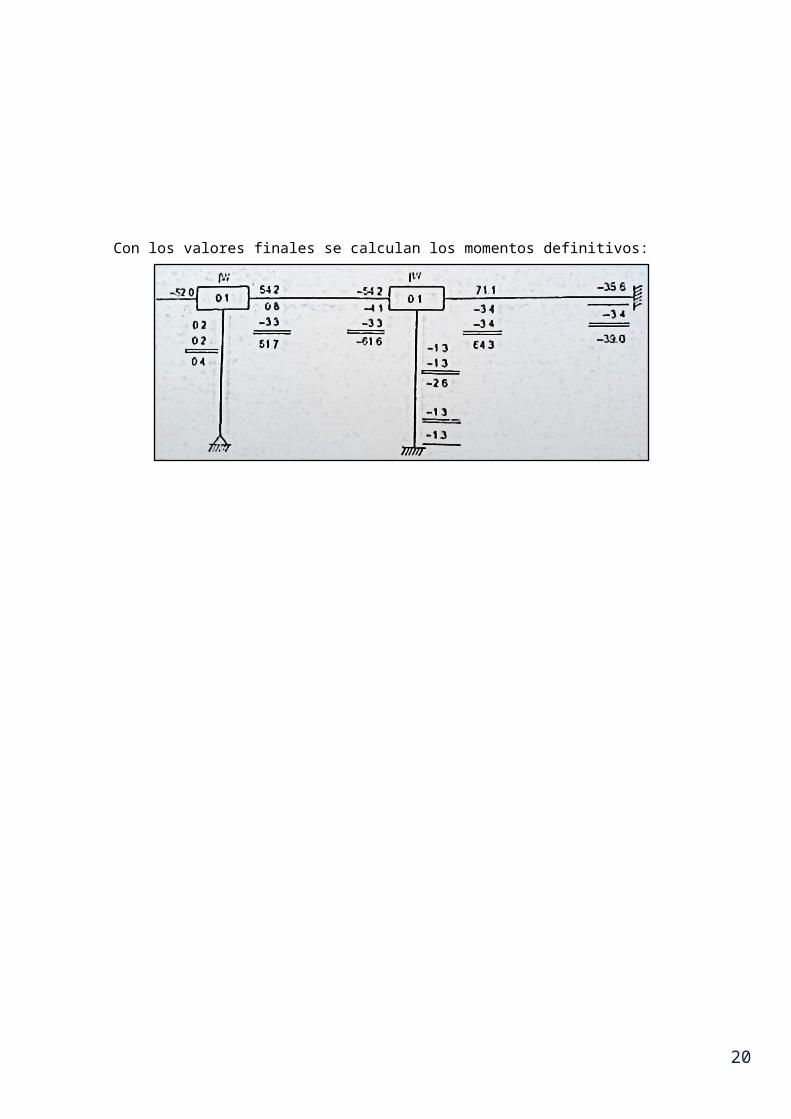
Con estos valores se elabora el cuadro siguiente. el proceso interactivo se inicia en el nudo C y converge al cabo de tres ciclos.
Con los valores finales se calculan los momentos definitivos:

17
5. MÈTODO TAKABEYA

18
5.1 INTRODUCCION
Se menciono anteriormente que otro de los métodos con amplia aceptación en nuestro medio es el de Takabeya, dado a conocer en París en 1938, y del cual solo apareció una versión inglesa en 1965, seguida por una alemana en el mismo año en el mismo año.
- La esencia del método consiste en encontrar, por aproximaciones sucesivas, los giros de los nudos y los desplazamientos de los pisos, en lugar de los momentos debidos a ellos, con los cual se disminuye considerablemente en numero de operaciones. Esto lo hace sumamente útil incluso hoy en día, con el auge de la computación electrónica.
- Una vez obtenida la convergencia en giros y desplazamientos, se procede a evaluar los momentos definitivos mediante las ecuaciones de Angulo de giro y deflexión.
5.2 ESTRUCTURAS SIN DESPLAZAMIENTO:
Para deducir las ecuaciones requeridas por el proceso interactivo, se parte como antes de las ecuaciones de giro y deflexión. En el caso de estructuras sin desplazamiento, estas se reducen a:
En que todos los términos tienen el mismo significado visto anteriormente.
Por conveniencia de define:
(5.2)
En donde C es una constante de proporcionalidad que permite trabajar con valores relativos. Las ecuaciones (5.1) se pueden rescribir entonces así:
Definiendo ahora rotaciones relativas:
Es posible reducirlas a:
Que servirán de base para la deducción de la ecuación de iteración buscada. En efecto, al aplicarse a un nudo i de la estructura la condición de equilibrio , resulta:

19
De la cual se puede despejar la rotación relativa del nudo i:
Se puede ver que en esta ecuación el primer termino es contante par cada nudo y en consecuencia, el segundo representa las correcciones debidas a los giros de los extremos alejados del nudo, de las barras que ocurren a él. Para simplificar la nomenclatura se definen:
5.3 SIMPLIFICACION POR EXTREMO ARTICULADO:
Lo mismo que en los métodos de Cross y Kani, conviene buscar una simplificación para el caso frecuente de extremo articulado.
Por analogía con dichos métodos, se puede esperar que baste emplear rigideces relativas ficticias, iguales a tres cuartas partes de las reales, y los valores de momento de empotramiento correspondientes al extremo opuesto articulado.
Suponiendo que i represente el nudo restringido y el nudo articulado, al aplicarse a este la ecuación (5.5b) resulta:
Y despejando el valor de ϕj:
Sustituyendo esta expresión en la ecuación (5.5a), resulta:
Y reagrupando sus términos:
20
Ahora bien, se ve que el primer término entre paréntesis no es otra cosa que el momento de empotramiento verdadero para extremo opuesto articulado:
Por otra parte, si se define:
La ecuación (5.11) se puede rescribir así:
Comparada con la ecuación (5.5a), se ve que para que sean equivalentes ϕj debe valer cero, o lo que es lo mismo, basta con ignorar las rotaciones de los extremos articulados para poder seguir usando la ecuación (5.9)en el proceso iterativo.
Lógicamente se deberá usar la ecuación (5.14) para la evaluar los momentos en los extremos restringidos de dichos miembros especiales.
5.4 ESTRUCTURAS CON DESPLAZAMIENTOS: SIN CARGA HORIZONTALES O CON CARGAS HORIZONTALES APLICADAS EN LOS NUDOS.
En el caso de una estructura con desplazamiento, los momentos definitivos en los extremos de los miembros están dados en general por las siguientes expresiones, conformes con las ecuaciones de Ángulos de giro y deflexión:

21
Considerando ahora una columna en el piso n, localizada entre los noveles n y n+1 , utilizando
los valores relativos Kij, ϕi y ϕj definidos mediante las ecuaciones (5.2) y (5.3), y definiendo
además:
En que:
δij = Desplazamiento relativo de los extremos de la columna ij, y
hij = altura de la columna ij.
Las ecuaciones anteriores se transforman en:
En que el signo positivo del termino δij implica que el nivel n se ha desplazado hacia la derecha, son respecto al nivel n+1.
Planteando ahora el equilibrio del nudo i, , se obtiene:
De donde se puede despejar ϕi:
Y recordando las definiciones de ϕºi y μij dadas con las ecuaciones (5.7) y (5.8), la expresión anterior se reduce a :
Con la que podemos llevar a cabo el proceso iterativo en cuanto a rotación de nudos se refiere.

22
EJEMPLO DE APLICACIÓN
- Analice el pórtico mostrado utilizando el método de Takabeya. La viga es de 300 mm ˣ 500mm y las columnas ˣ300 mm. En A el apoyo es articulado.
Solución:
PRIMER PASO:
Rigideces relativas:
Para utilizar la simplificación del extremo articulado:
Coeficientes de giro:
Similarmente se obtiene:

23
Momentos de empotrado:
Se evalúan:
PRIMER PASO:
Giros relativos iniciales:
Por la ecuación (5.7):
TERCER PASO:
Se adopta la secuencia B C.
CUARTO Y QUINTO PASOS
Proceso iterativo
Con estos valores se inicia el proceso y los resultados se van colocando en el diagrama siguiente:
Por la ecuación (5.9):
Segundo ciclo:

24
Tercer ciclo: