Tipos de Estructuras de los S. O. - carambula.net · Sistemas Operativos II – ITS – EMT –...
48
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula Tipos de Tipos de Estructuras de Estructuras de los S. O. los S. O.
-
Upload
phungkhuong -
Category
Documents
-
view
215 -
download
0
Transcript of Tipos de Estructuras de los S. O. - carambula.net · Sistemas Operativos II – ITS – EMT –...
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Tipos de Tipos de Estructuras de Estructuras de
los S. O.los S. O.

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
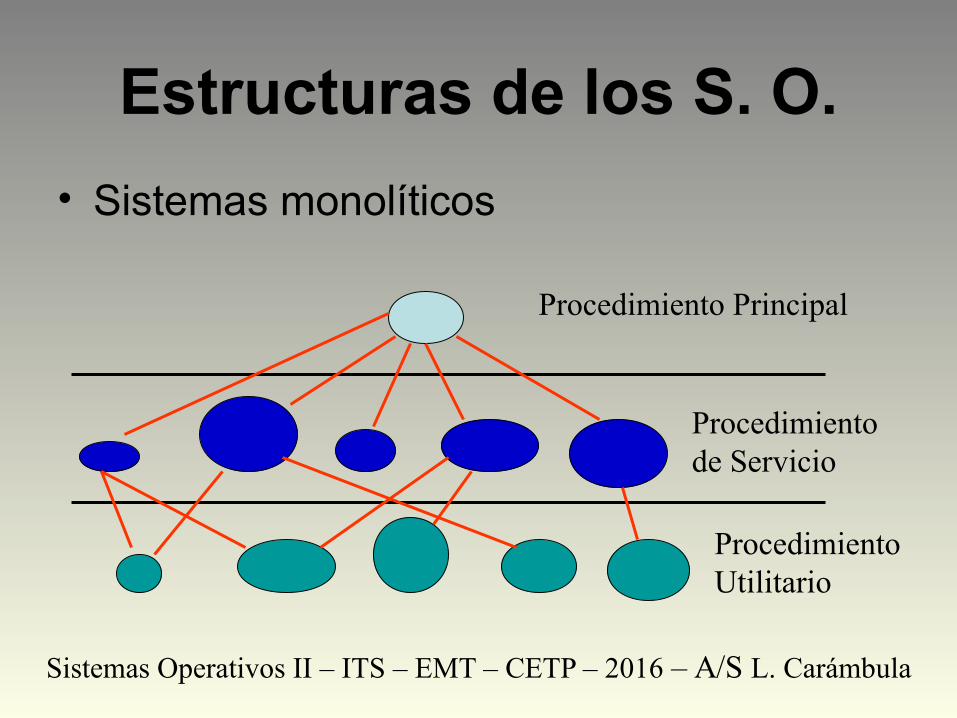
• Sistemas monolíticos– Es muy común, no existe la estructura o es
mínima
– El S. O. es una colección de procedimientos que se pueden llamar entre si
– Cada procedimiento tiene una interfaz bien definida.
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas monolíticos
Procedimiento Principal
Procedimientode Servicio
ProcedimientoUtilitario
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas monolíticos– Para ejecutar los servicios del S.O.:
• Se solicitan colocando los parámetros en lugares bien definidos (registros o pilas)
• Se ejecuta una llamada especial (tramp), llamada al núcleo o llamada al supervisor
• La instrucción cambia del modo usuario al modo núcleo (supervisor)
• Cuando termina el control regresa al programa del usuario

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas monolíticos
Programa 2 del Usuario
MemoriaPrincipal
Programa 1 del UsuarioLlamada al Núcleo
Proc.de Servicio
1 3
2
4

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas monolíticos
Programa 2 del Usuario
MemoriaPrincipal
Programa 1 del UsuarioLlamada al Núcleo
Proc.de Servicio
Prog. del UsuarioEn modo Usurio
S. O.En modo Núcleo
1 3
2
4
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas monolíticos– MS-DOS
– Unix
– Linux

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
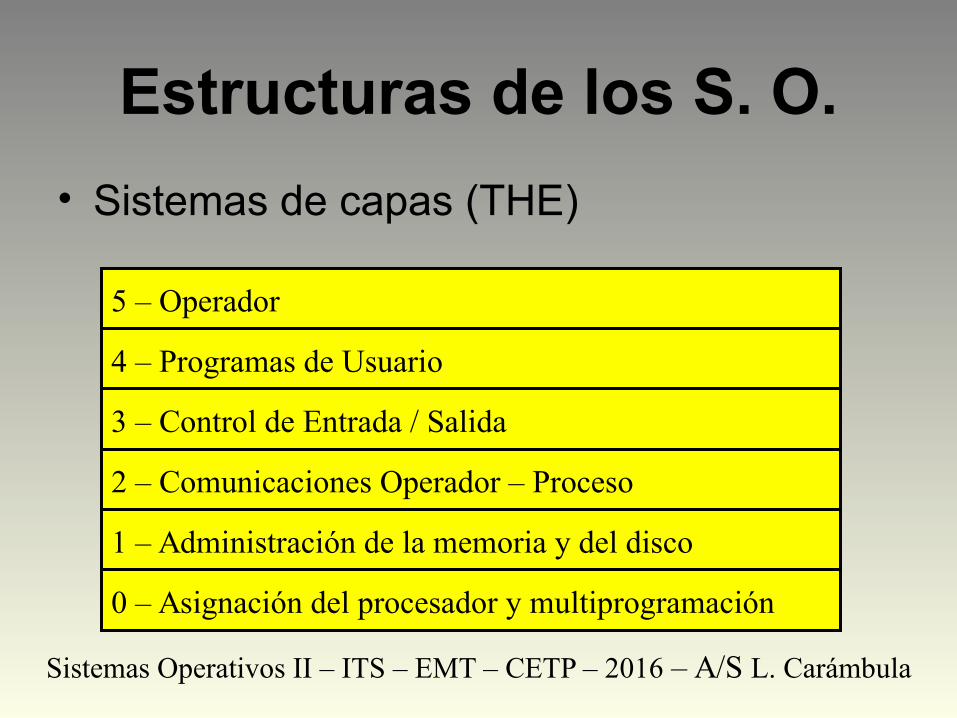
• Sistemas de capas (THE)– Dijkstra 1968
– Technische Hogeschool Eindhoven
– Consiste en organizar el S. O. como una jerarquía de capas, c/u construida sobre la inmediatamente inferior
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas (THE)
5 – Operador
4 – Programas de Usuario
3 – Control de Entrada / Salida
2 – Comunicaciones Operador – Proceso
1 – Administración de la memoria y del disco
0 – Asignación del procesador y multiprogramación

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas (THE)– Capa 0
• Trabaja con la asignación del procesador
• Alterna entre los procesos cuando ocurren las
interrupciones o expiran los cronómetros
• Proporciona la multiprogramación básica
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas (THE)– Capa 1
• Administra la memoria
• Asegura que las páginas (porciones de memoria)
requeridas por los procesos lleguen a memoria
cuando fueran necesarias

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas (THE)– Capa 2
• Administra la comunicación entre cada proceso y
la consola del operador
• Por sobre esta capa cada proceso tiene una
consola de operador
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas (THE)– Capa 3
• Controla los dispositivos de E/S y almacena en
buffers los flujos de información entre ellos
• Sobre esta capa cada proceso puede trabajar con
dispositivos abstractos de E/S en vez de
dispositivos reales

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas (THE)– Capa 4
• Aloja a los programas de usuario
• Los programas de usuario no tienen que
preocuparse por el proceso, memoria, consola o
control de E/S
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas (THE)– Capa 5
• Localiza al proceso operador del sistema
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
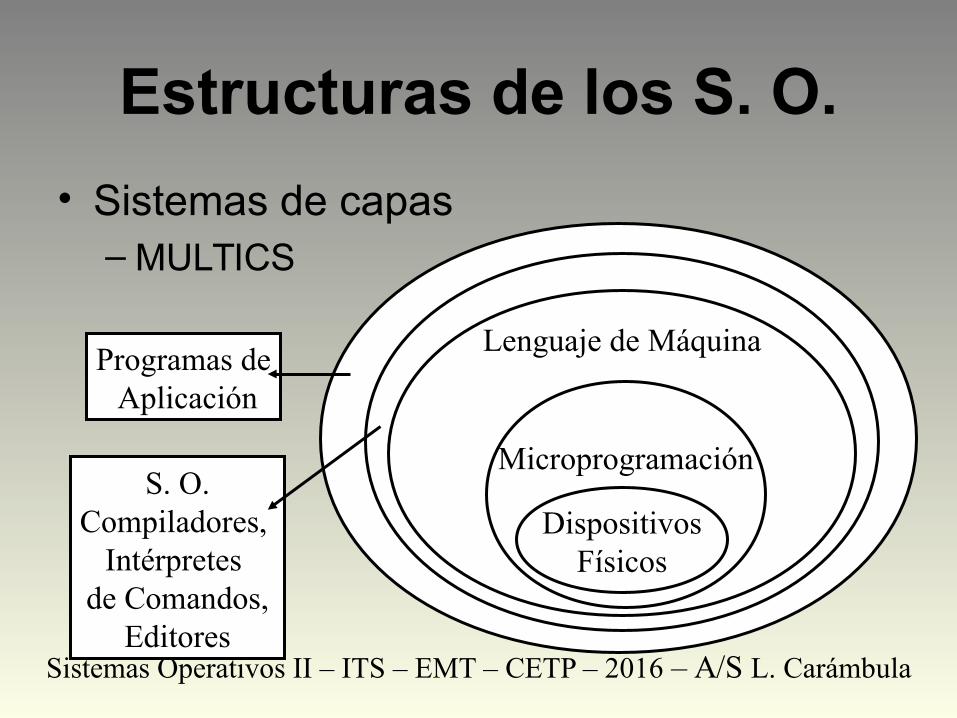
• Sistemas de capas – MULTICS
• Multiplexed Information and Computing Service
• Presenta una estructura de anillos concéntricos, siendo los interiores los más privilegiados
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
S. O.Compiladores,
Intérpretes de Comandos,
Editores
Lenguaje de Máquina
Microprogramación
Estructuras de los S. O.
• Sistemas de capas– MULTICS
DispositivosFísicos
Programas de Aplicación
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas – MULTICS
• Dispositivos físicos:– son la capa más baja– en ella están:
» los chips» cables» fuentes de poder» tubos de rayos catódicos» y otros dispositivos físicos.

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas – MULTICS
• Microprogramación:
– Software de bajo nivel
– Se encarga de los dispositivos de E/S
– Normalmente grabado en la R. O. M.

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas – MULTICS
• Lenguaje de Máquina– Tiene variada cantidad de instrucciones, en un rango
de 50 a 300– La mayoría sirven para desplazar datos a través de la
máquina y hacer operaciones aritméticas y comparar valores.

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas – MULTICS
• Sistema Operativo– oculta la complejidad de la utilización del hardware y
muestra un conjunto de instrucciones más apropiado para trabajar.
– Los programas del Sistema Operativo están protegidos de las acciones de los usuarios.
– Sobre este se ejecutan el resto de las aplicaciones
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas – MULTICS
• Programas de Aplicación– Programas con un fin específico
» Planillas de cálculo
» Procesadores de texto
» Presentaciones con Diapositivas
» Juegos
» Etc.

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Sistemas de capas – MULTICS -» Unix
• MIT, GE, Laboratorios Bell
– OS/2 • IBM
– eComStation• Serenity Systems
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
MáquinasMáquinasVirtualesVirtuales

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Máquinas Virtuales– Las máquinas virtuales instrumentan copias
exactas del hardware simple• modo núcleo / usuario• E/S• Interrupciones
– Pueden ejecutar cualquier S. O. que se ejecute en forma directa sobre el hardware
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
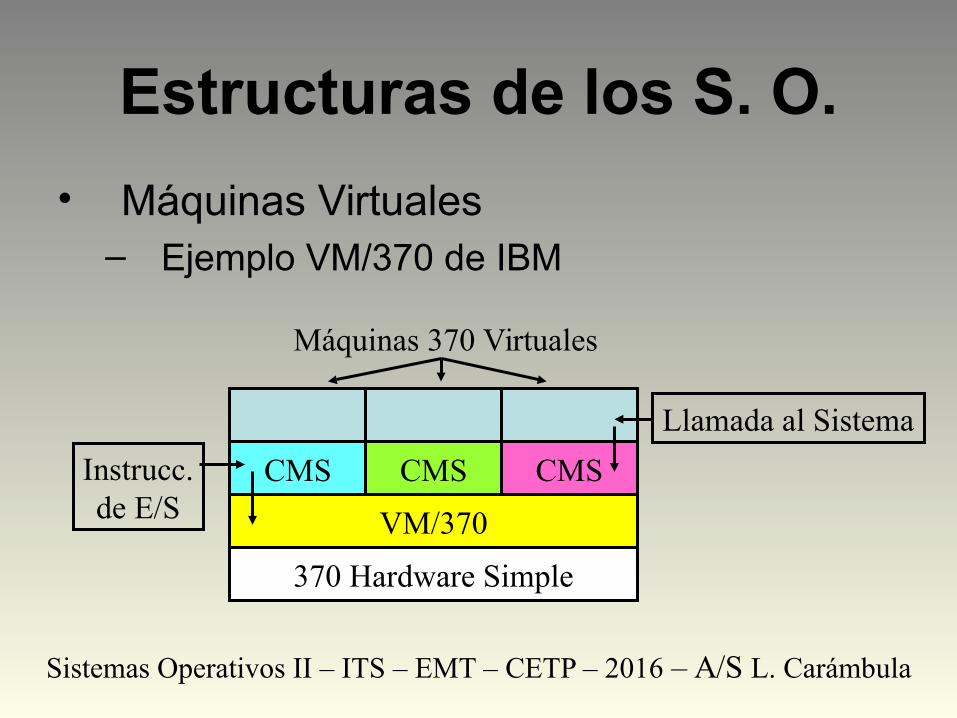
• Máquinas Virtuales– Ejemplo VM/370 de IBM
• Utiliza CMS (Conversational Monitor System)• Cuando se realiza una llamada al sistema
– La llamda es atrapada por el S. O. en su propia M. V.– El CMS proporciona las instrucciones de E/S en el
hardware para realizar la llamada– VM/370 atrapa estas instrucciones y las ejecuta en
sobre el hardware verdadero
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
• Máquinas Virtuales– Ejemplo VM/370 de IBM
Máquinas 370 Virtuales
CMS CMS CMS
VM/370
370 Hardware Simple
Llamada al Sistema
Instrucc.de E/S

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
ModeloModeloCliente / Cliente / ServidorServidor

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Modelo Cliente / Servidor
• Una tendencia de los S. O. modernos es mover el código a capas superiores y mantener el núcleo mínimo, de manera similar al VM/370 de IBM
• Implementar la mayoría de las funciones del S. O. en modo usuario
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Modelo Cliente / Servidor
– Para solicitar un servicio• El proceso de Usuario (proceso cliente) envía la
solicitud a un proceso servidor, que realiza la operación y regresa la respuesta
– El núcleo controla la comunicación entre los clientes y los servidores
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Modelo Cliente / Servidor
– Se fracciona el S. O. en partes
– C/U controlando un servicio:• de Archivos
• de Procesos
• de Terminales
• de Memoria
• Etc.

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Modelo Cliente / Servidor
– Los servidores se ejecutan como procesos en modo usuario
• No tienen acceso directo al hardware
• Se aíslan y acotan más fácilmente los problemas
– Se adapta para su uso en los sistemas distribuidos
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Estructuras de los S. O.
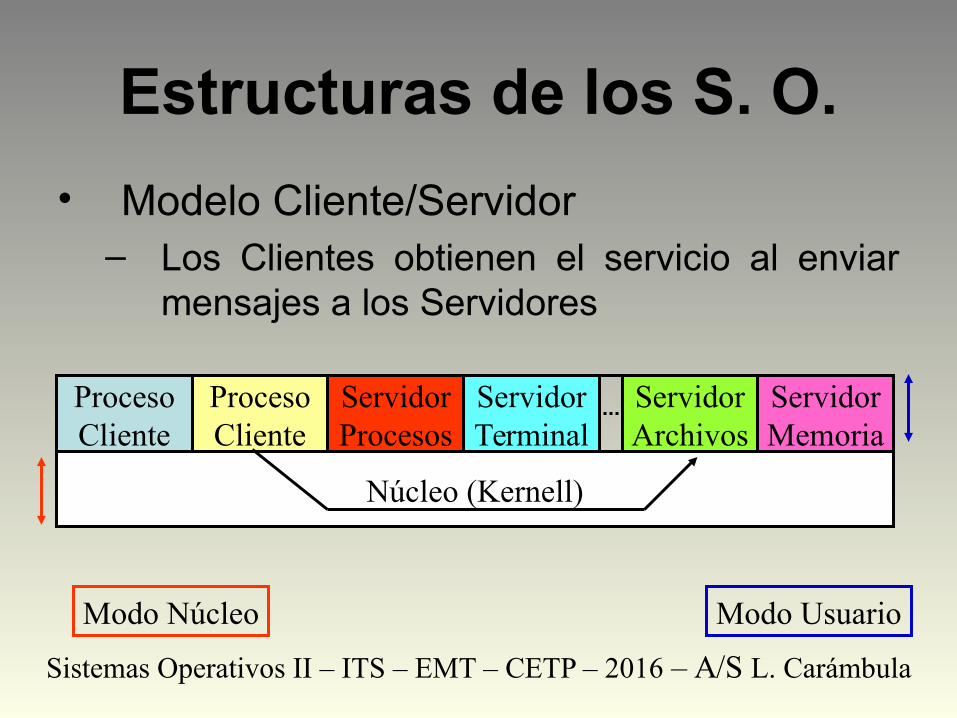
• Modelo Cliente/Servidor– Los Clientes obtienen el servicio al enviar
mensajes a los Servidores
ProcesoCliente
Modo UsuarioModo Núcleo
ProcesoCliente
ServidorProcesos
ServidorTerminal
ServidorArchivos
ServidorMemoria
Núcleo (Kernell)
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Sistemas de Tiempo Realde Tiempo Real
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas de Tiempo Real
• Es un sistema informático en el que el tiempo en que se producen sus acciones es significativo.
• Las acciones del sistema deben ser correctas, desde el punto de vista lógico o algorítmico, y deben producirse dentro de un intervalo de tiempo determinado.
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas de Tiempo Real
• Los sistemas de tiempo real suelen estar integrados en un sistema de ingeniería más general, en el que se realizan funciones de control y/o monitorización.
• A estos sistemas se los denomina Sistemas Empotrados o Embebidos (Embedded Systems).
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas de Tiempo Real
• Ejemplos:– Electrónica de consumo
• Videos,TVs, Lavadoras, Lavaplatos
– Aviación• Computadoras de vuelo, Path-finder
– Automóviles• Control de velocidad, ABS, Sistema de inyección
– Defensa• Bombas y misiles inteligentes, dirección de tiro
– Telecomunicaciones• Radios, teléfonos moviles
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas de Tiempo Real
• Requisitos Temporales– Tiempo real estricto (Hard Real Time)
• Todas las acciones deben ocurrir dentro del plazo especificado
• Ejemplo: Control de vuelo– Real real-time. Los tiempos de respuesta son muy
cortos• ejemplo: Sistema de guiado de misiles
– Timepo real flexible (Soft Real Time)• Se pueden perder plazos de vez en cuando• El valor (utilidad) de la respuesta decrece con el tiempo
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas de Tiempo Real
• Características– Gran tamaño y complejidad– Concurrencia
• Los dispositivos físicos controlados funcionan simultaneamente
• Los componentes de software que los controlan se ejecutan concurrentemente
– Dispositivos de E/S especiales• Los manejadores de dispositivos forman parte del software
de aplicación– Seguridad y fiabilidad
• Sistemas críticos, fallos con consecuencias muy graves
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas de Tiempo Real
• Características– Determinismo temporal
• Acciones en intervalos de tiempo determinados• Es fundamental que el comportamiento temporal de los STR
sea determinista:• La eficiencia es importante pero la predictibildad es esencial• Hay que preveer el comportamiento en el peor caso posible
– Manipulación de números reales• Capacidad para manipular números de coma flotante y
reales (cálculos de alto grado de precisión)
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Sistemas DistribuidosDistribuidos
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Distribuidos
• es aquél que está compuesto por varias computadoras autónomas conectadas mediante una red de comunicaciones y equipadas con programas que les permitan coordinar sus actividades y compartir recursos.
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Distribuidos
• Propiedades: – Está compuesto por varios recursos informáticos de
propósito general, tanto físicos como lógicos, que pueden asignarse dinámicamente a tareas concretas.
– Estos recursos están distribuidos físicamente, y funcionan gracias a una red de comunicaciones.
– Hay un sistema operativo de alto nivel, que unifica e integra el control de los componentes.
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Distribuidos
• Propiedades: – El hecho de la distribución es transparente,
permitiendo que los servicios puedan ser solicitados especificando simplemente su nombre (no su localización).
– El funcionamiento de los recursos físicos y lógicos está caracterizado por una autonomía coordinada.
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Distribuidos
• Aplicaciones de Sistemas Distribuidos:
1. La distribución es fundamentalmente un medio para conseguir un fin
2. La distribución es un problema en sí misma.
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Distribuidos
• La distribución es fundamentalmente un medio para conseguir un fin
– Computación masivamente paralela, de propósito general y de alta velocidad.
– Tolerancia a fallos (confianza, disponibilidad).
– Respuesta a demandas con requisitos de tiempo real.

Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Distribuidos
• La distribución es un problema en sí misma.– Bases de datos distribuidas. Es necesario acceder a
los datos desde lugares geográficamente dispersos, y además almacenarlos también en varios lugares diferentes.
– Fabricación automatizada. Es necesaria la colaboración de muchos procesadores para coordinar las tareas en una fabrica.
Sistemas Operativos II – ITS – EMT – CETP – 2016 – A/S L. Carámbula
Sistemas Distribuidos
• La distribución es un problema en sí misma.– Supervisión remota y control. Los sensores y los
nodos donde se toman las decisiones de control pueden estar en diferentes partes de un sistema distribuido.
– Toma de decisiones coordinada. Es necesario que varios procesadores participen en la toma de decisiones, por ejemplo, porque cada uno de ellos tiene una parte de los datos relevantes.








![Calculo de Estructuras-Estructuras Continuas [AM-AV] Vers1](https://static.fdocuments.ec/doc/165x107/55cf8e66550346703b91c51a/calculo-de-estructuras-estructuras-continuas-am-av-vers1.jpg)