Tesis Erick Garrido Aranda.pdf
80
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO INSTITUTO DE CIENCIAS BÁSICAS E INGENIERÍA CENTRO DE INVESTIGACIÓN EN TECNOLOGÍAS DE LA INFORMACIÓN Y SISTEMAS INSTITUTO DE CIENCIAS BÁSICAS E INGENIERÍA MAESTRÍA EN CIENCIAS EN AUTOMATIZACIÓN Y CONTROL CONTROL ÓPTIMO LINEAL PARA UNA DESHIDRATADORA T E S I S QUE PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN AUTOMATIZACIÓN Y CONTROL PRESENTA: ING. ERICK SALVADOR GARRIDO ARANDA ASESORES: DR. OMAR JACOBO SANTOS SANCHEZ DR. HUGO ROMERO TREJO PACHUCA HGO., MÉXICO SEPTIEMBRE DE 2013
-
Upload
erick-garrido-aranda -
Category
Documents
-
view
66 -
download
0
Transcript of Tesis Erick Garrido Aranda.pdf
UNIVERSIDAD AUTÓNOMADEL ESTADO DE HIDALGO
INSTITUTO DE CIENCIAS BÁSICAS E INGENIERÍA
CENTRO DE INVESTIGACIÓN EN TECNOLOGÍAS DE LA INFORMACIÓN Y SISTEMAS
INSTITUTO DE CIENCIAS BÁSICAS E INGENIERÍA
MAESTRÍA EN CIENCIAS EN AUTOMATIZACIÓN Y CONTROL
CONTROL ÓPTIMO LINEAL PARA UNA DESHIDRATADORA
T E S I SQUE PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS
EN AUTOMATIZACIÓN Y CONTROL
PRESENTA:ING. ERICK SALVADOR GARRIDO ARANDA
ASESORES:
DR. OMAR JACOBO SANTOS SANCHEZDR. HUGO ROMERO TREJO
PACHUCA HGO., MÉXICO SEPTIEMBRE DE 2013

Ing. Erick Salvador Garrido Aranda
Control óptimo Lineal para unadeshidratadora

Índice1. Introducción 7
1.1. Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2. Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4. Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.5. Objetivos específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.6. Métodos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.7. Sintonización Ziegler - Nichols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.8. Control óptimo para sistemas con retardos . . . . . . . . . . . . . . . . . . . . . . 121.9. Enfoque de Lyapunov-Krasovskii . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.10. Control clásico avanzado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.11. Herramientas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.11.1. Software LabVIEW con modulo de adquisición de datos (DAQ) . . . . . . 161.12. Controlador Industrial PID Honeywell DC1040 . . . . . . . . . . . . . . . . . . . 171.13. Ventajas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.14. Limitaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.15. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2. Revision bibliográfico de resultados previos 202.1. Sistemas con retardos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2. Control óptimo para sistemas con retardos . . . . . . . . . . . . . . . . . . . . . . 232.3. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3. Justificación 253.1. importancia del deshidratado de alimentos. . . . . . . . . . . . . . . . . . . . . . 253.2. Importancia de un lazo de control en un proceso de deshidratado. . . . . . . . . . 253.3. Control PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4. Control Óptimo para el proceso de deshidratado . . . . . . . . . . . . . . . . . . 263.5. Descripción de la solución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4. Construcción y diseño de la plataforma 284.1. Tipos de deshidratadoras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.2. descripción de la planta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.3. identificación de la planta (Modelo aproximado) . . . . . . . . . . . . . . . . . . . 32
5. Control óptimo para la plataforma experimental 355.1. Programación dinámica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.2. Control predictivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2.1. Ley de control óptima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.3. Análisis de estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.4. Análisis de estabilidad ante perturbaciones no modeladas . . . . . . . . . . . . . 465.5. conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4

6. Resultados experimentales 566.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566.2. PID sintonizado mediante tablas de Ziegler-Nichols . . . . . . . . . . . . . . . . . 566.3. PID sintonizado Robustamente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 586.4. Controlador óptimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 616.5. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
7. Resultados análisis de nutrientes 657.1. Análisis estadístico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
A. Reglas y Teoremas útiles 74A.1. Índice de desempeño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74A.2. Regla de Leibnitz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74A.3. Complemento de Schur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
B. Programas para implementación y demostraciones 75B.1. Programa en LabVIEW del controlador óptimo . . . . . . . . . . . . . . . . . . . 75B.2. Programa Matlab para solución de ecuación de Riccati . . . . . . . . . . . . . . . 76B.3. Programa en Matlab para encontrar la solución de LMI . . . . . . . . . . . . . . 76
5

Índice de figuras1. respuesta de la planta al aplicarle señal escalón. . . . . . . . . . . . . . . . . . . . 112. Tarjeta de adquisición de datos de National Instruments. . . . . . . . . . . . . . . 173. Tabla con los colores de referencia para el cable de termopar, extensión y com-
pensación según la norma ANSI 43710. . . . . . . . . . . . . . . . . . . . . . . . . 184. Respuesta de una planta con retardo . . . . . . . . . . . . . . . . . . . . . . . . . 215. Planta con retardo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226. Prototipo experimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307. diagrama del prototipo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308. Diagrama de la parte de instrumentación. . . . . . . . . . . . . . . . . . . . . . . 319. Interface de potencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3210. deshidratadora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3311. Respuesta al escalón . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3412. temperatura controlada sintonización Ziegler-Nichols. . . . . . . . . . . . . . . . . 5713. Señal de control sintonización Ziegler-Nichols. . . . . . . . . . . . . . . . . . . . . 5814. Temperatura con controlador sintonizado robustamente. . . . . . . . . . . . . . . 5915. Señal de control con controlador sintonizado robustamente. . . . . . . . . . . . . 6016. Temperatura Controlada óptimamente. . . . . . . . . . . . . . . . . . . . . . . . . 6117. Señal de control aplicando control óptimo. . . . . . . . . . . . . . . . . . . . . . . 6218. Temperaturas obtenidas con cada controlador. . . . . . . . . . . . . . . . . . . . 6319. Señal code control de acuerdo al controlador. . . . . . . . . . . . . . . . . . . . . 6320. Temperatura en cámara de deshidratado 50◦C . . . . . . . . . . . . . . . . . . . . 6621. Temperatura en el jitomate durante el proceso de deshidratado. . . . . . . . . . . 6722. Temperatura en el jitomate durante el proceso de deshidratado. . . . . . . . . . . 6723. Señal de control aplicada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6824. Cámara de deshidratado a 60◦C. . . . . . . . . . . . . . . . . . . . . . . . . . . . 6825. Temperatura del jitomate deshidratado a 60◦C. . . . . . . . . . . . . . . . . . . . 6926. Humedad de jitomate deshidratado a 60◦C. . . . . . . . . . . . . . . . . . . . . . 6927. Señal de control aplicada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7028. Temperatura de la cámara de deshidratado a 70◦C. . . . . . . . . . . . . . . . . . 7029. Temperatura del jitomate deshidratado a 70◦C. . . . . . . . . . . . . . . . . . . . 7130. Temperatura del jitomate deshidratado a 70◦C. . . . . . . . . . . . . . . . . . . . 7131. Señal de control aplicada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7232. Programa para implementación de ley de control óptima. . . . . . . . . . . . . . 75
Índice de tablas1. Sintonización Ziegler-Nichols en lazo abierto . . . . . . . . . . . . . . . . . . . . . 102. Ganancias obtenidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563. Ganancias introducidas al controlador . . . . . . . . . . . . . . . . . . . . . . . . 574. Ganancias de sintonización robusta . . . . . . . . . . . . . . . . . . . . . . . . . . 585. Ganancias introducidas al controlador . . . . . . . . . . . . . . . . . . . . . . . . 596. Contenido de licopeno, fenoles totales y vitamina C . . . . . . . . . . . . . . . . . 73
6
1 INTRODUCCIÓN 7
CAPITULO 1
1. Introducción
El control a lo largo del tiempo ha desempeñado un papel muy importante enel avance de la ingeniería, y se ha vuelto una parte importante e integral de losprocesos industriales, de tal manera que ahorra tiempo y dinero en los procesosindustriales. El control es esencial en el diseño de sistemas de piloto automáti-co, control numérico, en la industria aero espacial, en el diseño de camiones yautomóviles en la industria automotriz. De igual manera es esencial en las opera-ciones industriales como el control de presión, temperatura, humedad y flujo en laindustria de procesos. Por esta razón es necesario que el operador cuente con losconocimientos necesarios, sin embargo en la mayoría de los procesos industrialeslos lazos de control operan con una sintonización empírica o con valores de fabrica,de tal manera que el control se coloca en modo manual o se pone en cero la partederivativa, para el caso de un PID, y esto ocasiona que no se tenga un lazo decontrol eficiente y bien sintonizado. Se trata este tema por que para nosotros seinvolucra a los sistemas que controlan temperatura, y en el proceso a tratar quees el deshidratado la variable a controlar precisamente es la temperatura.
El deshidratado durante años ha sido utilizado por nuestros antepasados paraevitar la descomposición de los alimentos, lo utilizaban los incas durante la edadmedia colocando sus alimentos al sol para secarlos, y en la actualidad utilizamosdeshidratadoras de varios tipos para conservar nuestros alimentos haciendo queesto sea mas rápido y eficiente.
Deshidratar consiste en extraer el agua de los alimentos, lo que evita la super-vivencia de microorganismos y la putrefacción, porque las bacterias del interiorde los alimentos y procedentes del aire necesitan agua en el alimento para crecer,el secado les impide sobrevivir en él.
En la industria del deshidratado de alimentos un proceso muy utilizado esel control de temperatura. Estos procesos consumen mucha energía debido a losdispositivos utilizados para generar calor como es el caso de las deshidratadoraseléctricas, lo cual es un problema fuerte que aun se sigue tratando.
El controlador mas utilizado es el PID industrial el cual requiere ser sintonizadopara mantener la temperatura deseada, pero no se ha realizado un análisis paraminimizar el consumo de energía implementando alguna ley de control.

1 INTRODUCCIÓN 8
Es por todo esto que en este trabajo de tesis se implementa un control óptimopara ahorrar energía en el proceso de deshidratado de jitomates.
El control óptimo es una técnica matemática que estudia sistemas dinámicos osistemas que evolucionan con el tiempo. Esto requiere una descripción matemáticadel problema, las restricciones impuestas sobre el y la función que se va a maxi-mizar o minimizar.
Para esto se hace uso de herramientas como el modelado matemático, métodosnuméricos, software matemático y de instrumentación virtual y métodos de opti-mización dinámica.
En este caso el sistema cuenta con un retardo implícito en la planta, el cualafecta considerablemente el buen desempeño del controlador, el retardo se presen-ta debido a la distancia que existe entre la fuente de calor y la salida de aire. Poresta razón se toma en cuenta el retardo para diseñar una ley de control óptima queminimice energía, para poder comparar esta ley de control con un PID industrial,el cual esta sintonizado con el método de las tablas de Ziegler - Nichols y tambiénse sintoniza robustamente, con lo cual se puede realizar un análisis en cuanto adiferentes parámetros como lo son el sobre impulso, tiempo de establecimiento,saturación de actuador y consumo de energía, además de poder hacer un análisisde nutrientes con respecto a estos parámetros, realizando el deshidratado de jito-mates con los controladores mencionados.
1.1. Planteamiento del problema
En la industria del deshidratado de alimentos se trabaja con equipos con altoconsumo de energía, en los que es necesario controlar la temperatura. Para imple-mentar el control óptimo, es necesario conocer el modelo matemático ya que estaley de control depende del modelo de la planta, por lo que se obtendrá un modeloaproximado a un sistema lineal de primer orden con retardo en la entrada. Como elmodelo es aproximado se suponen la existencia de dinámicas con comportamientono lineal. En este caso la entrada del sistema es el voltaje aplicado a la resistenciacalefactora, la salida es la variable del proceso que se desea controlar en este casola temperatura y se mide en milivolts de acuerdo al sensor utilizado.
El voltaje aplicado a la resistencia genera el calor requerido para calentar la cá-

1 INTRODUCCIÓN 9
mara de deshidratado y mantener la temperatura en una referencia fija, tomandoen cuenta que se tiene un ventilador con velocidad fija, el cual permite la entradade aire a la planta.
Debido al el alto consumo de energía en el proceso de deshidratado, y que hastael momento no se ha reportado ningún análisis para la pérdida de nutrientes enel producto de acuerdo a el sobre impulso, tiempo de establecimiento y error enestado estacionario, se propone implementar un control óptimo aplicando teoríapara sistemas con retardos para el análisis de las propiedades alimenticias y min-imización de energía
El deshidratado representa del 10 al 20% del consumo de energía en la in-dustria.
No hay análisis de los efectos que causan los parámetros de control sobre losnutrientes reportado hasta el momento.
No se ha aplicado algún tipo de control que minimice el consumo de energíaque considere el retardo.
1.2. Hipótesis
Se pueden llevar a cabo minimización de energía en un sistema de temperaturaaproximándolo a un sistema de primer orden y lineal utilizando control óptimoutilizando el enfoque de control moderno para sistemas con retardos.

1 INTRODUCCIÓN 10
1.3. Objetivos
Este trabajo cuenta con dos objetivos:
1.4. Objetivo general
Controlar un sistema de temperatura que presenta retardo en la entrada me-diante un control óptimo que permita minimizar la energía.
1.5. Objetivos específicos
Implementar un control óptimo en cuanto a la minimización de energía, estomanteniendo velocidad de viento constante y controlando el voltaje aplicadoa la resistencia eléctrica, para mantener una temperatura constante en lacámara de deshidratado.
Sintonizar robustamente un PID industrial que controle temperatura en lacámara de deshidratado, para comparar con el controlador óptimo parámet-ros como sobre impulso, consumo de energía, tiempo de establecimiento, erroren estado estacionario y análisis de nutrientes.
1.6. Métodos
1.7. Sintonización Ziegler - Nichols
Lo que se desea es controlar la variable del proceso utilizando un controladorPID industrial Honeiwell el cual es necesario sintonizar para obtener un correctofuncionamiento, uno de los métodos utilizados es Ziegler-Nichols [15] el cual estabasado en las tablas obtenidas por los investigadores que lleva el nombre de esteprocedimiento para lo cual se tiene.
Controlador Kp ki kdP τ
h ∞ 0Pi 0,9 τh
h0,3 0
PID 1,2 τh 2h 0,5h
Tabla 1: Sintonización Ziegler-Nichols en lazo abierto
El método de sintonización Ziegler-Nichols es el siguiente:
Si es posible obtener un modelo matemático de la planta se pueden aplicardistintas técnicas de diseño con el fin determinar los parámetros del controlador

1 INTRODUCCIÓN 11
que cumplan con las especificaciones del estado estable y es estado transitoriodel sistema en lazo cerrado. En caso de que sea muy difícil obtener el modelomatemático, un enfoque analítico no es posible por lo que se deben realizar prue-bas experimentales para realizar la sintonización del controlador PID.
Existen dos métodos para sintonización por zieglr-Nichols, y el que se utilizaraes el primer método, el cual consiste en aplicarle como entrada a la planta a contro-lar una señal escalón, para hacer una identificación de los parámetros aproximadosde la planta real.
Al aplicar la señal escalón a la planta, esta debe mostrar una respuesta formade S como muestra la Figura-1.
Figura 1: respuesta de la planta al aplicarle señal escalón.
Esto es solo si la planta no contiene integradores ni polos complejos conjugados,los parámetros que se obtienen son τ , h y k.Donde:
τ es la contante de tiempo de la planta.h es el retardo que presenta la planta.k es la ganancia de la planta.
La constante de tiempo τ se determina con el 63% de la ganancia k de la plan-ta, y el tiempo h se puede medir experimentalmente con un osciloscopio o con unsistema de adquisición de datos.

1 INTRODUCCIÓN 12
La ganancia K debe ser normalizada en caso de no aplicar una señal escalónunitaria, esto se ve en el capitulo 3 en la parte de la descripción de la plataformaexperimental.
Con los parámetros de la planta se puede tener la aproximación para un sistemade primer orden con retardo como el que se muestra.
Y (S)
U(S)=
ke−sh
τs+ 1
Ya que se tienen los parámetros de la planta se sustituyen los valores de losparámetros que piden las ecuaciones de la tabla 1 para el controlador deseado yde esa manera se encontraran las ganancias del controlador.
1.8. Control óptimo para sistemas con retardos
Al hablar de control óptimo se pueden tener diferentes puntos de vista de óp-timo, esto es que puede tener un control óptimo en diferentes aspectos, es ahí endonde se hace la pregunta ¿Que es lo que se desea optimizar?.
Para responder esta pregunta es necesario saber cual es la parte que se deseaoptimizar y esta puede ser maximizada o minimizada, teniendo bien definido estose procede a realizar la optimización.
La teoría de control óptimo permite resolver problemas dinámicos, donde laevolución del sistema depende del tiempoEl control óptimo consiste en encontrar una ley de control que minimice el índicede desempeño J, tomando en cuenta que en el caso de sistemas con retardos setoman los valores que se tienen de estado presente y estados anteriores, esto haceque se presenten retardos distribuidos.
1.9. Enfoque de Lyapunov-Krasovskii
La estabilidad es el primer objetivo en sistemas de control, sin la estabilidad elresto de las demás especificaciones como lo son la rapidez de convergencia, pocasoscilaciones y robustes, no tendrían sentido.
La planta con la que se trabaja tiene un retardo, y el análisis de estabilidad desistemas con retardos se complica cuando se presenta un retardo en el modelo del

1 INTRODUCCIÓN 13
sistema, ya que la ecuación característica no es algebraica.
A continuación se presenta un ejemplo que permite observar que los métodosclásicos de Lyapunov no son adecuados para el análisis de sistemas con retardo.
Sea el sistema escalar lineal
˙x(t) = ax(t) + bx(t− h)
Donde a, b son constantes.
Se escoge la Funcional de Lyapunov, definida positiva
v(x) = x2
Y se obtiene su derivada
dv(t)
dt= 2x(t) ˙x(t) = 2x(t) [ax(t) + bx(t− h)]
= 2ax2 + 2bx(t)x(t− h)
Se puede observar que cuando b = 0, el sistema no presenta retardo y si a < 0la segunda derivada es definida negativa con lo cual se garantiza la estabilidad delsistema.
Por otro lado cuando 6= 0 no se puede saber el signo del termino x(t)x(t − h)por lo que no se puede saber el signo de la derivada, de esta manera se puedeobservar claramente que la herramienta que normalmente se podría utilizar deLyapunov no es útil cuando se presentan retardos.
para poder tratar el análisis de estabilidad de sistemas con retardos, la metodologíade Lyapunov presenta dos enfoques:
Enfoque de Krasovskii: En este enfoque se toma en cuenta que el estadode un sistema con retardo es una función definida en [t − h, t], por tal motivo sedeben usar funcionales de Lyapunov que capturan el estado del sistema.
El enfoque de Lyapunov-Krasovskii considera el retardo de la planta y permiteestablecer las condiciones suficientes que garantizan estabilidad en lazo cerradopara este caso el control óptimo.

1 INTRODUCCIÓN 14
Enfoque de Razumikhin: Este enfoque únicamente utiliza funciones de Lya-punov, pero toma en cuenta algunas condiciones adicionales que logran que estemétodo tome en cuenta la dependencia que existe entre x(t) y x(t − h) ya queestos dos pertenecen a la misma trayectoria.
Para poder realizar un análisis de estabilidad en sistemas con retardos, es nece-sario tener en cuanta algunas definiciones y teoremas.
Definición 1Funcional. La funcional del estado xt denotada como v(xt) sedefine como.
Cn [−h, 0]→ Rxt → v(xt)
Donde Cn es el espacio de funciones continuas.
Definición 2 Funcional definida positiva. La funcional v(xt se dice definidapositiva si:
existe H > 0 tal que v(xt) es definida para toda ‖ xt ‖h< H
Es continua y acotada
v(0h) = 0 y v(xt) > 0 si xt 6= Oh
Definición 3 La Funcional v(t, xt se dice definida positiva si:
Existe H > 0 tal que v(t, xt) es definida para toda ‖ xt ‖h< H y para todat ≥ 0
es continua para todo t ≥ 0 fijo con respecto a xt en el punto xt = 0
v(t, 0h) = 0
Existe una funcional v0(xt) (llamada funcional soporte) definida positiva talque:v0(xt)v(t, xt),∀t ≥ 0
A partir de las definiciones anteriores se puede comenzar a hablar de la esta-bilidad, y para esto se parte de la funcional:
x = F (t, xt)
Donde la funcional F (t, xt) esta definida para t ≥ 0 y para ‖ xt ‖h≤ H ysatisface las siguientes propiedades:
1 INTRODUCCIÓN 15
Es continua
Es Lipchitz respecto a la variable xt
Es acotada
∀t ≥ 0; ‖ xt ‖h≤ H; ‖ F (t, xt ‖< m
Sin perdida de generalidad, se supone que F posee la solución trivial, es decir:
x ≡ 0⇒ x(t) ≡ 0;F (t, 0) ≡ 0,∀t ≥ 0
Si este no es el caso, mediante un cambio de variable es posible hacer que lafuncional si tenga una solución trivial, y la estabilidad de esta solución trivialimplica la de la solución original.
Definición 4 Solución Trivial. La solución trivial del sistema, se dice establesi para toda ε > 0 y t0 ≥ 0 existe ϕ tal que ‖ ϕ(·) ‖< δ entonces ‖ x(t, ϕ, t0 ‖< εpara todo t ≥ t0.
Partiendo de la s definiciones anteriores y en base al enfoque de Lyapunov-Krasovski se presentan los siguientes Teoremas:
Teorema 1 Estabilidad en el sentido de Lyapunov-Krasovkii. La solucióntrivial del sistema, es estable si y solo si existe una funcional v(t, xt definidapositiva y una función v1(x(t)) definida positiva tal que:
v1(x(t)) ≤ v(t, xt), ∀t ≥ 0 y ‖ xt ‖≤ H
v(t, xt decrece a lo largo de la trayectoria del sistema
Teorema 2Estabilidad asintótica en el sentido de Lyapunov-Krasovskii.La solución trivial del sistema es asintóticamente estable si y solo si existe unafuncional v(t, xt definida positiva y una función v1x(t) definida positiva tal que:
v1(x(t)) ≤ v(t, xt), ∀t ≥ 0 y ‖ xt ‖≤ H
v(t, xt) decrece monotónicamente a lo largo de las trayectorias del sistemacuando t→∞
1 INTRODUCCIÓN 16
1.10. Control clásico avanzado
Con el método D-particiones[7, 9] es posible analizar la estabilidad de man-era robusta de cuasipolinomios que son los que incluyen el termino e−sh. Estecuasipolinomio se utiliza para sintonizar robustamente las ganancias del contro-lador PID.
En este método se cuenta con dos incógnitas y por tal motivo primeramente sesintoniza el intervalo de ganancias estables para Kp, posteriormente se encuentrauna zona de estabilidad robusta para la ganancia Ki y por ultimo se encuentra elrango de ganancias estables para Kd. De estos rangos de ganancias se seleccionauna fija para Kp, Ki y Kd, tomando en cuenta que entre mas lejos se encuentrela ganancia de la frontera inestable se tendrá una sintonización robusta.
1.11. Herramientas
Para resolver el problema se utilizan varias herramientas como lo son sistemasde adquisición de datos software y electrónica de potencia para la resistencia quecalienta el aire, a continuación se describen cada una de estas herramientas.
1.11.1. Software LabVIEW con modulo de adquisición de datos (DAQ)
Para poder llevar a cavo la implementación del control óptimo, se ocupa el soft-ware de National instruments LabVIEW en su Version 7.1, el cual se utiliza paraprocesos de instrumentación industrial y aplicaciones de control, ya que facilita laimplementación de leyes de control complejas, cuenta con un ambiente gráfico ytiene sistemas de comunicación como lo son las tarjetas de adquisición de datos(DAQ) que permiten conectar sensores y actuadores, ya que cuenta con canalesde entrada salida analógicos y digitales, de los cuales solo se utilizan los canalesanalógicos de entrada para obtener lecturas de temperatura que es la variable deproceso y los canales analógicos de salida para enviar la señal de control en formade voltaje al actuador, que es el que se encarga de incrementar o disminuir latemperatura de la cámara de deshidratado, para poder acoplar la señal de controlemitida por la DAQ con la resistencia calefactora, es necesario utilizar una señalde salida de PWM la cual se realiza con un micro controlador PIC el cual recibe enuna entrada analógica la señal de control que manda la DAQ. La salida del microcontrolador es enviada aun mosfet para poder alimentar la resistencia y variar elvoltaje aplicado a esta.

1 INTRODUCCIÓN 17
Figura 2: Tarjeta de adquisición de datos de National Instruments.
1.12. Controlador Industrial PID Honeywell DC1040
El controlador PID con que se cuenta es el Honeywell DC1040 que es un con-trolador que incluye un indicador de temperatura y entrada para termopar pro-gramable tipo J, la salida es de corriente para el estándar industrial de 4-20mA.Este controlador cuenta con varias funciones como la de auto sintonización, lacual permite obtener las ganancias automáticamente mientras el controlador estaconectado al proceso, también cuenta con la compensación de la banda de tiempomuerto, la cual realiza una ayuda a equilibrar el tiempo del retardo de la planta.Su programación es sencilla al igual que su instalación por lo que su utilizaciónen la industria es muy amplia.
el termopar es un dispositivo relativamente barato que se utiliza como sensory pueden medir un amplio rango de temperatura y por eso es muy importanteseleccionarlo de manera adecuada y para esto existe una tabla de termopares quepermite hacerlo, ya que de acuerdo al rango de temperatura y la aleación de laque esta construido es el tipo de termopar que se debe utilizar, en la Figura- 3 semuestra una tabla para observar en que rango de temperatura y de que aleaciónes el termopar utilizado.
Tabla con los colores de referencia para el cable de termopar, extensión y com-pensación según las normas IEC 584 y ANSI 43710.
Es importante conectar de manera adecuada el termopar para obtener la lecturacorrecta.

1 INTRODUCCIÓN 18
Figura 3: Tabla con los colores de referencia para el cable de termopar, extensión y compensaciónsegún la norma ANSI 43710.
Para ingresar las ganancias al controlador es importante saber que se cuenta conlas siguientes ecuaciones.
BP =100
Kp
Ti =Kp
Ki
Td =kd
kp
Donde:BP es la banda proporcional.Ti es el tiempo integral que ajusta la acción integral.Td es el tiempo derivativo hace mas rápida la acción de control.
1.13. Ventajas
El controlador óptimo ahorra energía y no satura demasiado el actuador, locual mejora el tiempo de vida de este ya que no lo somete a cambios bruscos devoltaje.
1 INTRODUCCIÓN 19
1.14. Limitaciones
El controlador óptimo depende del modelo por lo cual para su correcto fun-cionamiento es necesario identificar la planta al punto de operación.
1.15. Resultados
Se logra minimizar energía con el controlador óptimo en comparación con elPID sintonizado robustamente y sintonizado por Ziegler-Nichols.
con el controlador PID no es necesario el modelo ya que este trabaja sobreel error y el controlador óptimo depende de los parámetros del modelo ypara su correcto funcionamiento es necesario identificar la planta al punto deoperación.
Los experimentos realizados muestran de manera clara que el actuador no sesatura utilizando el controlador óptimo.
El sistema de vision funcionó de manera eficiente y con la transformaciónobtenida solo es necesario calibrar la cámara y por medio de el algoritmo decalibración se obtiene la transformación para cualquier cámara.

2 REVISION BIBLIOGRÁFICO DE RESULTADOS PREVIOS 20
CAPITULO 2
2. Revision bibliográfico de resultados previos
En este capitulo se presentan trabajos realizados previamente, relacionados conlos sistemas que contienen retardos y las técnicas de control que se utilizan en estetrabajo de tesis.
2.1. Sistemas con retardos
Los retardos están siempre presentes en los sistemas físicos como pueden serrobots, control de velocidad de motores, algunos procesos industriales como hornos,tanques acoplados, procesos químicos, columnas de destilación, etc. En muchos deestos sistemas el retardo es muy pequeño al compararlo con las dinámicas delsistema y por lo tanto se pueden asumir como cero o simplemente no se consideraya que no afecta de manera considerable al momento de controlar la planta. Sinembargo existen otros sistemas que si presentan un retardo considerable, el cualdebe ser tratado, ya que cuando una planta posee un retardo importante, al apli-carle una señal de entrada no se presenta una respuesta inmediata en la acciónde salida lo cual origina que al aplicar una señal de control esta no tenga efectorápidamente y la planta tendrá dificultades para ser controlada, de esta manera elsistema pueda presentar efectos como oscilaciones, inestabilidad, y un desempeñopobre. Los problemas mas frecuentes son:
El proceso necesita transportar fluidos a lo largo de distancias considerables.
Se presentan fases de incubación en el proceso que comúnmente se encuentranen sistemas biológicos.
Los sensores requieren un plazo considerable para entregar una medición.
El actuador requiere un tiempo importante para producir un cambio.
Estos efectos se pueden presentar todos juntos o solo algunos de ellos, y suelenimpedir la acción apropiada de los lazos de control por que las perturbacionesno se detectan oportunamente,la acción de control que depende de la mediciónadecuada no ocurre en el instante correcto, la acción de control tarda en hacerefecto sobre el proceso, todo esto ocasiona que el laso de control pueda resultarinestable[25, 3, 12, 21].

2 REVISION BIBLIOGRÁFICO DE RESULTADOS PREVIOS 21
Los retardes de una manera general los podemos representar con la ecuación.
x(t) = F (x(t), x(t− h))
donde x(t) ∈ Rn es el vector de estado del sistema, h ∈ R tal que h > 0 esel retardo y F es una función continua que satisface la condición de Lipschitz conrespecto a sus argumentos.
Un sistema con retardo presenta elementos del tipo e−sh en la función de trans-ferencia del sistema donde h es el retardo, y la representación se muestra en laFigura-4.
Figura 4: Respuesta de una planta con retardo
En los sistemas con retardos se pueden presentar 3 tipos diferentes de retardos.
Retardos puntuales. En este tipo de retardos, los argumentos dependen dehi ∈ R, y no necesariamente están relacionados.
˙x(t) = F (x, x(t− h1), x(t− h2), ..., x(t− hm)), t ≥ t0, h1, h2, ..., hm > 0
Retardos conmensurables. Estos se presentan cuando todos los retardos quese tienen son múltiplos de un retardo:
˙x(t) = F (x, x(t− h0), x(t− h0n1), ..., x(t− h0nm), h0 < h0n1 < h0nm)

2 REVISION BIBLIOGRÁFICO DE RESULTADOS PREVIOS 22
Retardos distribuidos. Cuando se presentan este tipo de retardos se tiene laforma:
˙x(t) = f1x +
∫ 0
−hf2(x(t+ Θ))
Los sistemas con retardos también se pueden clasificar en:
Sistema Retardado: x = f(xt, x(t− h), ..., x(t− hn))
Sistema Neutral: x = f(x(t), x(t− h), x(t− h2), ..., x(t− hn, x(t− hn))
Sistema Avanzado: x = f(x(t), x(t+ h), ..., x(t+ hn))
A continuación se describe el proceso a controlar en este trabajo de tesis, elcual presenta un retardo en el transporte.
La planta a controlar es una deshidratadora, en la cual se desea mantener unatemperatura de referencia, para lograr esto la planta cuenta con una resistenciaeléctrica que permite calentar el aire que entra mediante un ventilador, y de estemodo se lleva aire caliente a la cámara de deshidratado, la Figura- 5 ilustra esteproceso.
Figura 5: Planta con retardo
Como se observa en la Figura- 5 al entrar aire a la cámara de calentamiento estepasa por la resistencia eléctrica para ser calentado, para que de esta manera lleguea la cámara de deshidratado, pero el tiempo que tarda en calentar la resistencia alaire que pasa por ella y el tiempo que tarda en llegar el aire caliente a la cámarade deshidratado, producen un retardo en el transporte del aire caliente, el cuales muy considerable para esta planta lo cual hace notar que entre mayor distan-cia exista entre la cámara de calentamiento y la cámara de deshidratado mayor
2 REVISION BIBLIOGRÁFICO DE RESULTADOS PREVIOS 23
ser el retardo, de este modo para poder controlarla es necesario tomarlo en cuenta.
Existen diferentes técnicas para evitar un mal desempeño del controlador, ycomo la planta cuenta con el retardo de una manera implícita, la forma de com-pensar ese retardo es tomando medidas sobre el controlador, por lo que se puedeconsiderarse insertando un retardo en la ley de control.
2.2. Control óptimo para sistemas con retardos
Para los sistemas que se desean controlar y que son de una complejidad may-or y se requieren operaciones de transferencia de calor,como controlar reactores,algunos sistemas de temperatura, sistemas químicos etc. los retardos se hacenconsiderables y esto impide que los controladores P, PI y PID funcionen apropi-adamente, además de que con estos controladores no se hace una minimización deenergía. por tal motivo se utiliza una ley de control óptima que considere el retar-do y pueda controlar de manera eficiente el lazo de control, además de minimizarel consumo de energía sin saturar los actuadores.
La teoría de control óptimo tiene sus orígenes en el calculo variacional, quebusca máximos y mínimos de funcionales de costo[23].
El problema de control óptimo para los sistemas en tiempo continuo se carac-teriza por encontrar una ley de control u(t) que actué sobre el sistema en ciertointervalo t ∈ [to, tf ] y que minimice un índice de desempeño. Para el caso de sis-temas con retardos se toman en cuanta valores del estado presente y pasado, estohace que se presenten retardos distribuidos[1, 17].
El control óptimo es una técnica matemática que puede utilizarse como unabuena opción en el control y la mejora del desempeño de plantas que contienenretardos, pero esta técnica aun no es de uso frecuente en la industria debido a quesu implementación es compleja [30].
Para poder tener una amplio conocimiento acerca del control óptimo para sis-temas con retardos este se ha tratado de muchas formas, algunos artículos tratan elcontrol óptimo para sistemas con retardo en donde el retardo se considera en el es-tado y en la salida de control [20], mediante la programación dinámica [26, 18, 32]y también utilizando las funcionales complejas de Lyapunov Krasovskii [31], quehan sido utilizadas para un control subóptimo[24, 28].

2 REVISION BIBLIOGRÁFICO DE RESULTADOS PREVIOS 24
Existen sistemas que cuentan con retardos en la entrada,en el estado o enambos. Cuando el control óptimo se aplica por retroalimentación de estado y laplanta presenta retardos en el estado, el control presentara retardos distribuidosen el estado [18]. Cuando el sistema presenta retardos en el control [1], el contro-lador presenta retardos distribuidos en la señal de control.
La implementación leyes de control para sistemas con retardos distribuidos hansido estudiadas por diferentes autores[21, 22, 25] y [10] como se sabe este tipo deretardos involucra una integral, la cual es obtenida mediante una aproximaciónnumérica. En [21, 13] se trata el control óptimo para sistemas con retardos enel estado en el cual aparece una integración numérica en la cual la solución esaproximada paso a paso en cada sub intervalo, en la cual la solución define lasmatrices del controlador, además de probar la aproximación numérica con un may-or numero de pasos para aproximar la integral, haciendo que el lazo de control enlazo cerrado se vuelva inestable. Pero hasta el momento no se habían validado demanera experimental estas leyes de control para sistemas estables.
2.3. Conclusiones
Hasta el momento los resultados obtenidos solo son simulaciones de un controlóptimo para sistemas con retardo, pero es muy importante tener una validaciónreal de la implementación de las leyes de control, pero esto aun no se ha repor-tado. Es por eso que en este trabajo se obtienen resultados experimentales deun sistema de control de temperatura, el cual es controlado mediante una ley decontrol optima de horizonte infinito en la cual se tiene como actuador el sistemacalefactor y se mantiene una velocidad de viento fija a diferencia de [8]. El controlóptimo presenta retardos distribuidos en el control y es considerado invariante enel tiempo, los resultados que se presentan en el capitulo 7 valídan la ley de control.
Otra parte muy importante es la experimentación con un PID industrial sin-tonizado robustamente,esto con el objeto de comparar el desempeño del controlóptimo con el controlador PID en cuanto a tiempo de convergencia, error en estadoestacionario y el uso de energía.
3 JUSTIFICACIÓN 25
CAPITULO 3
3. Justificación
3.1. importancia del deshidratado de alimentos.
Para conservar alimentos y evitar refrigerarlos estos desde la antigüedad se handeshidratado, pero al deshidratarlos no se ha analizado que tantas propiedadespierden y una de las propiedades que se quieren analizar del jitomate saladete esla pérdida de color, ya que el color en un jitomate es señal de calidad además deque con evidencia epidemiológica del posible efecto protector del licopeno contra elcáncer, diversos estudios de cultivos de células y tejidos animales han demostradoel potencial anticancerígeno del licopeno[6, 4].
3.2. Importancia de un lazo de control en un proceso de deshidratado.
Los procesos de deshidratado para su eficiente y correcto funcionamiento re-quieren de mantener una temperatura constante, preestablecida por un operador.La temperatura debe ser mantenida durante todo el proceso de deshidratado, porlo tanto se requiere un control de temperatura que neutralice las perturbacionescomo temperatura del medio ambiente, contenido de humedad de los materiales.
Estos procesos en los que se controla temperatura, utilizan calefactores eléctri-cos que al ser generalmente resistencias eléctricas se requiere que sean de potenciaselevadas y consumen grandes cantidades de energía.Los actuadores desde la antigüedad se han controlado por medio del control ON-OFF que no es muy preciso y el actuador esta sometido a una saturación muyimportante, lo que puede causar que fallen de manera frecuente, por lo que poste-riormente se implementaron los controladores PID que son los mas utilizados enla actualidad por su buen desempeño.
3.3. Control PID
En la industria existen muchos procesos que requieren ser controlados y moni-toreados. La temperatura es uno de los parámetros mas importantes que la indus-tria monitorea y controla. El 95% de los controladores industriales son PID[19],ya que es robusto y trabaja sobre el error que existe entre el setpoint y la variablede proceso.
3 JUSTIFICACIÓN 26
En estos controladores no se tiene control sobre el consumo de energía, el buendesempeño de estos depende de la buena sintonización que puedan tener, pero es-ta no actúa directamente sobre el consumo de energía que el controlador necesitapara alcanzar el valor de referencia, además de que la mayoría de los controladoresson sintonizados empíricamente o con la auto sintonización con la que cuentan loscontroladores mas actuales, aunque se logre tener un comportamiento adecuadoen cuanto al control de temperatura, el consumo de energía es bastante alto yaque aun con este tipo de controlador los actuadores se encuentran saturados, y elconsumo de energía y el control de temperatura depende mucho de la sintonizacióndel controlador para poder mejorar y aunque se alcance el valor de temperaturadeseado la sintonización del controlador no garantiza una reducción eficiente enel consumo de energía.
3.4. Control Óptimo para el proceso de deshidratado
Este tipo de control aun presenta un grado de dificultad considerable en la im-plementación y aun no tiene mucha presencia en la industria, una ley de controlóptimo trabaja sobre el modelo de la planta a controlar pero lo que lo hace notan robusto, pero a pesar de esto puede mostrar buenos resultados en cuanto ala saturación de los actuadores y el consumo de energía, ya que este minimizaun índice de desempeño el cual involucra la señal de control que esta implicadadirectamente con el consumo de energía y los actuadores.
En la actualidad es de mucha importancia el ahorro de energía ya que estoimplica ayudar a conservar mas recursos naturales del planeta, también se reduceel consumo de combustibles fósiles para generar energía eléctrica y con esto sereduce la emisión de contaminantes del medio ambiente y como consecuencia delahorro de energía se tiene un menor costo en la factura de consumo.
3.5. Descripción de la solución
Para este trabajo se construye un prototipo que permita realizar el control detemperatura utilizando un PID industrial Honeywell, e una implementar la ley decontrol óptima, con el objeto de comparar ambos controladores.
El prototipo consta de un ventilador, el cual entrega ingresa aire frío a veloci-dad de viento constante a una cámara de calentamiento, en la que se encuentrael actuador que es una resistencia eléctrica permitiendo calentar el aire frío quepasa a través de ella, para transportarlo a una cámara de deshidratado en la que

3 JUSTIFICACIÓN 27
se requiere mantener una temperatura constante.
Para saber la temperatura a la que se encuentra la cámara de deshidratado, escolocado un sensor de temperatura para el controlador óptimo y otro sensor parael controlador PID, estas señales son conectadas a una DAQ para poder moni-torear las señal de control y temperatura, y de esta manera registrarlas en el discoduro para poder registrar el comportamiento del controlador.
El controlador PID es sintonizado mediante las tablas de Ziegler-Nichols yutilizando el método D-particiones[7, 9] y la señal de control es enviada a un mi-crocontrolador, el cual enviara una señal PWM al actuador.
EL controlador Óptimo se implementa mediante el software de instrumentaciónvirtual LabVIEW en donde se programa la ley de control, los datos del sensor detemperatura son recibidos por una DAQ, para que después la ley de control pro-gramada envíe una señal de control analógica al mismo microcontrolador utilizadocon el PID, todos los datos de temperatura señal de control y potencia consumidason registrados en el disco duro para posteriormente poder realizar la compara-ción con el PID industrial y poder observar gráficamente el comportamiento delcontrolador.

4 CONSTRUCCIÓN Y DISEÑO DE LA PLATAFORMA 28
CAPITULO 4
4. Construcción y diseño de la plataforma
En este capitulo se describe de una manera mas detallada la plataforma con laque se esta trabajando y se mencionan algunos tipos de deshidratadoras existentes.
Para el caso de la deshidratadora que se construyó se obtiene el modelo aprox-imado de una manera experimental, se explica el controlador óptimo aplicado y lamanera en como se sintonizo robustamente el controlador PID para poder hacerla comparaciones de los controladores.
4.1. Tipos de deshidratadoras
El objetivo principal del deshidratado de alimentos es la conserva de estos me-diante el secado, reduciendo el contenido de humedad para evitar el crecimientode microbios y evitar la refrigeración de los alimentos.
Secado:El secado es una operación en la que se elimina por evaporación casi toda el
agua presente en los alimentos, mediante la aplicación de calor bajo condicionesde operación controladas [11].
Existen diferentes tipos de secadores o deshidratadoras. La configuración bási-ca de una deshidratadora es una cámara de deshidratado, en la cual es colocadoel producto que sera sometido al proceso, de igual manera consta de un sistemaque introduce aire caliente a la cámara de deshidratado utilizando conductos quepuedan dirigir el aire al producto. El agua es removida del producto y es en-viada hacia afuera en una sola operación. El aire se calienta cuando pasa porresistencias eléctricas o combinación directa con gases de combustion de escape.A continuación se describen las partes que conforman a una deshidratadora.
Generador de aire:Los secadores de aire deben contar con un sistema que permita la entrada deaire a una o diferentes velocidades de flujo, para eso se utilizan ventiladores.

4 CONSTRUCCIÓN Y DISEÑO DE LA PLATAFORMA 29
Calefactor:En calefactores directos el aire es calentado en combinación con gases decombustion de escape. En calefactores indirectos el aire es calentado a travésde resistencias eléctricas.El costo de los calentadores directos es mas bajo que los indirectos, peroalgunos productos se llegan a dañar o contaminar debido a los gases.
Alimentadores o feeders:Estos se encargan de depositar el alimento a deshidratar sobre la base enla cual estarán expuestas al flujo de aire, y pueden ser transportadores detornillos, mesas rotantes y bandejas vibrantes.
Existen diferentes Tipos de deshidratadoras y aquí se mencionarán algunos.
Secador de charolas.
Secador de lecho fluidizado.
Secador de horno.
Secadores de túnel.
Secadores con cinta transportadora.
Secadores de bandeja para laboratorio.
4.2. descripción de la planta
La planta utilizada debe mantener una velocidad de viento constante de (2fracms),para que el aire al pasar por la resistencia calefactora sea calentado a una tem-peratura constante con el mínimo consumo de energía,y el producto a deshidratarreciba este aire y la humedad sea expulsada. La plataforma consta de las siguientespartes:
Como generador de aire se utiliza ventilador a velocidad constante.
Se cuenta con una resistencia eléctrica de nicromel como calefactor.
El alimentador es la charola para posicionar el producto.
Para el control de temperatura se utilizó.
Sensor de temperatura.
4 CONSTRUCCIÓN Y DISEÑO DE LA PLATAFORMA 30
tarjeta de adquisición de datos.
software de instrumentación virtual LabVIEW.
PID industrial Honeywell.
Salida PWM utilizando un microcontrolador PIC.
Interface de potencia.
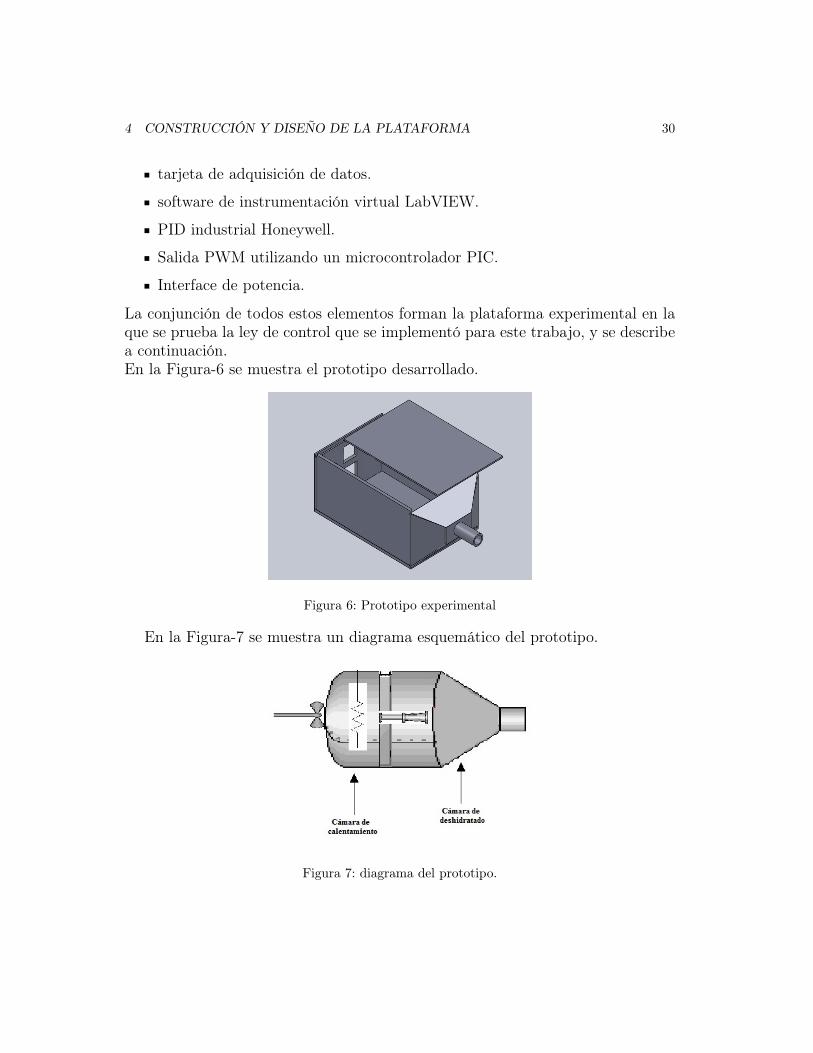
La conjunción de todos estos elementos forman la plataforma experimental en laque se prueba la ley de control que se implementó para este trabajo, y se describea continuación.En la Figura-6 se muestra el prototipo desarrollado.
Figura 6: Prototipo experimental
En la Figura-7 se muestra un diagrama esquemático del prototipo.
Figura 7: diagrama del prototipo.
4 CONSTRUCCIÓN Y DISEÑO DE LA PLATAFORMA 31
Para mantener la temperatura constante y poder ahorrar energía se implemen-tó una ley de control que permita esto y se tratará en el capitulo 3.
Para que se realice el proceso de control de temperatura utilizando el PIDindustrial y la ley de control óptima la plataforma cuenta con dos secciones queson instrumentación y la interface de potencia.
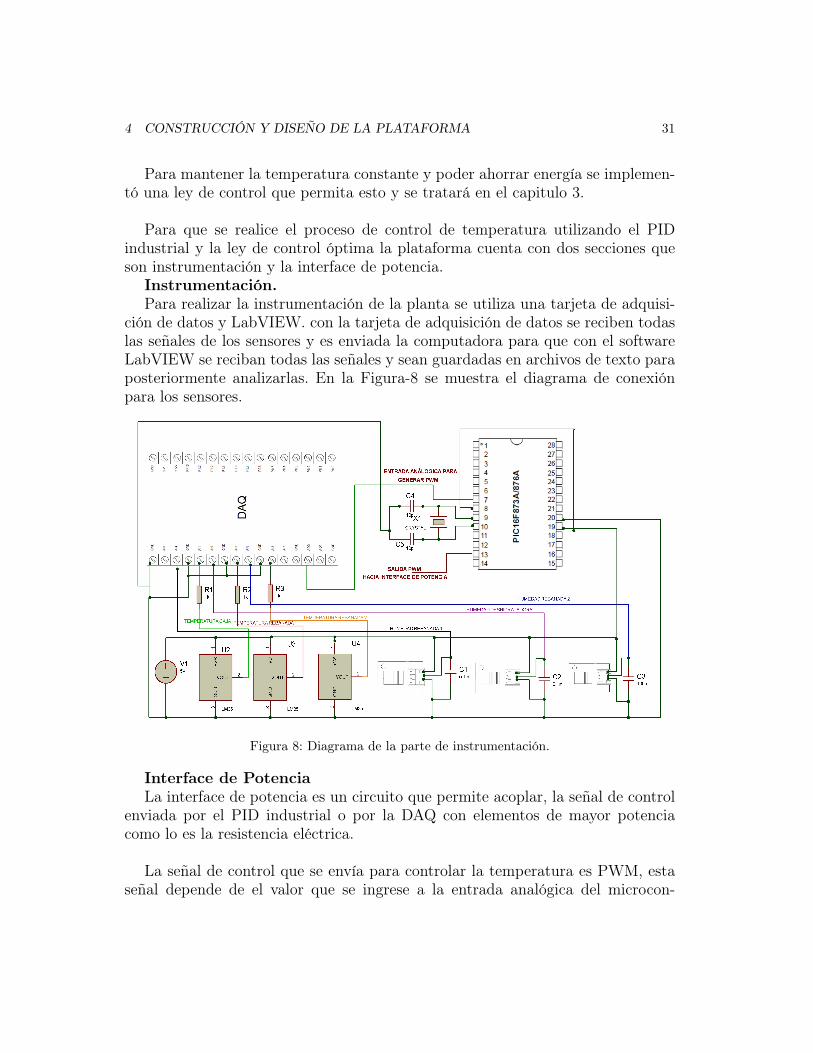
Instrumentación.Para realizar la instrumentación de la planta se utiliza una tarjeta de adquisi-
ción de datos y LabVIEW. con la tarjeta de adquisición de datos se reciben todaslas señales de los sensores y es enviada la computadora para que con el softwareLabVIEW se reciban todas las señales y sean guardadas en archivos de texto paraposteriormente analizarlas. En la Figura-8 se muestra el diagrama de conexiónpara los sensores.
Figura 8: Diagrama de la parte de instrumentación.
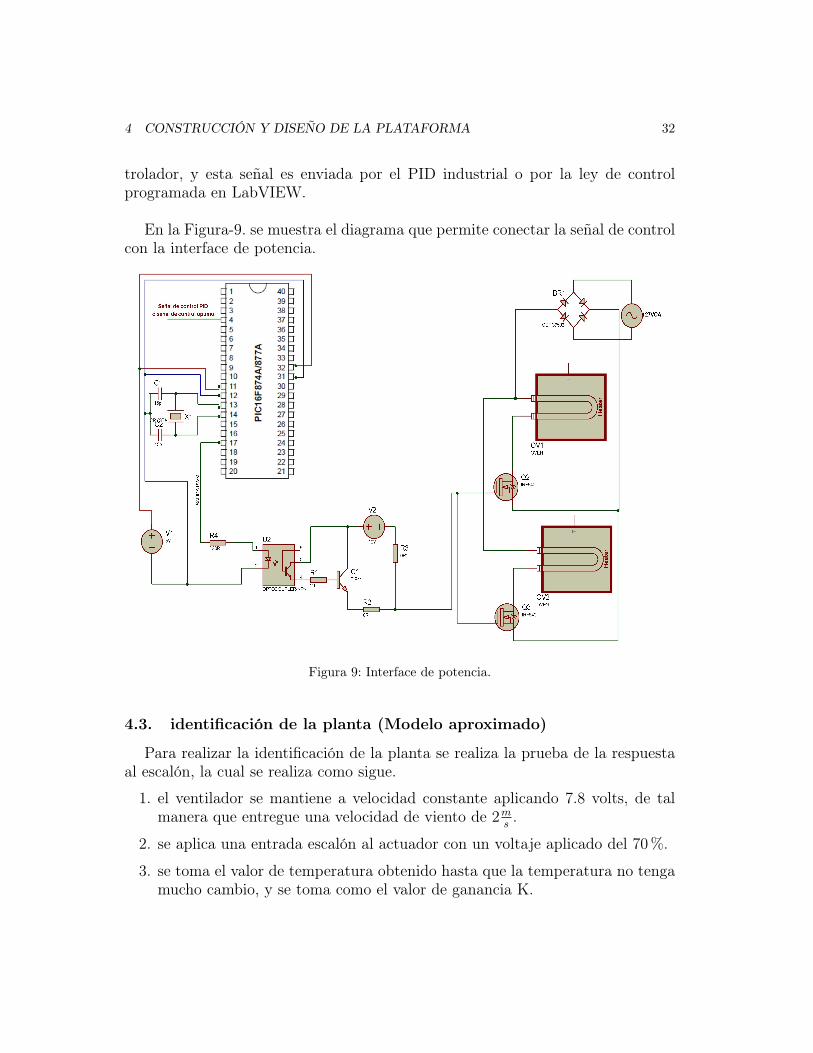
Interface de PotenciaLa interface de potencia es un circuito que permite acoplar, la señal de control
enviada por el PID industrial o por la DAQ con elementos de mayor potenciacomo lo es la resistencia eléctrica.
La señal de control que se envía para controlar la temperatura es PWM, estaseñal depende de el valor que se ingrese a la entrada analógica del microcon-
4 CONSTRUCCIÓN Y DISEÑO DE LA PLATAFORMA 32
trolador, y esta señal es enviada por el PID industrial o por la ley de controlprogramada en LabVIEW.
En la Figura-9. se muestra el diagrama que permite conectar la señal de controlcon la interface de potencia.
Figura 9: Interface de potencia.
4.3. identificación de la planta (Modelo aproximado)
Para realizar la identificación de la planta se realiza la prueba de la respuestaal escalón, la cual se realiza como sigue.
1. el ventilador se mantiene a velocidad constante aplicando 7.8 volts, de talmanera que entregue una velocidad de viento de 2m
s.
2. se aplica una entrada escalón al actuador con un voltaje aplicado del 70%.
3. se toma el valor de temperatura obtenido hasta que la temperatura no tengamucho cambio, y se toma como el valor de ganancia K.
4 CONSTRUCCIÓN Y DISEÑO DE LA PLATAFORMA 33
4. Para obtener τ se toma el 63% de el valor de ganancia k obtenido.
5. De manera gráfica se obtiene el valor de h.
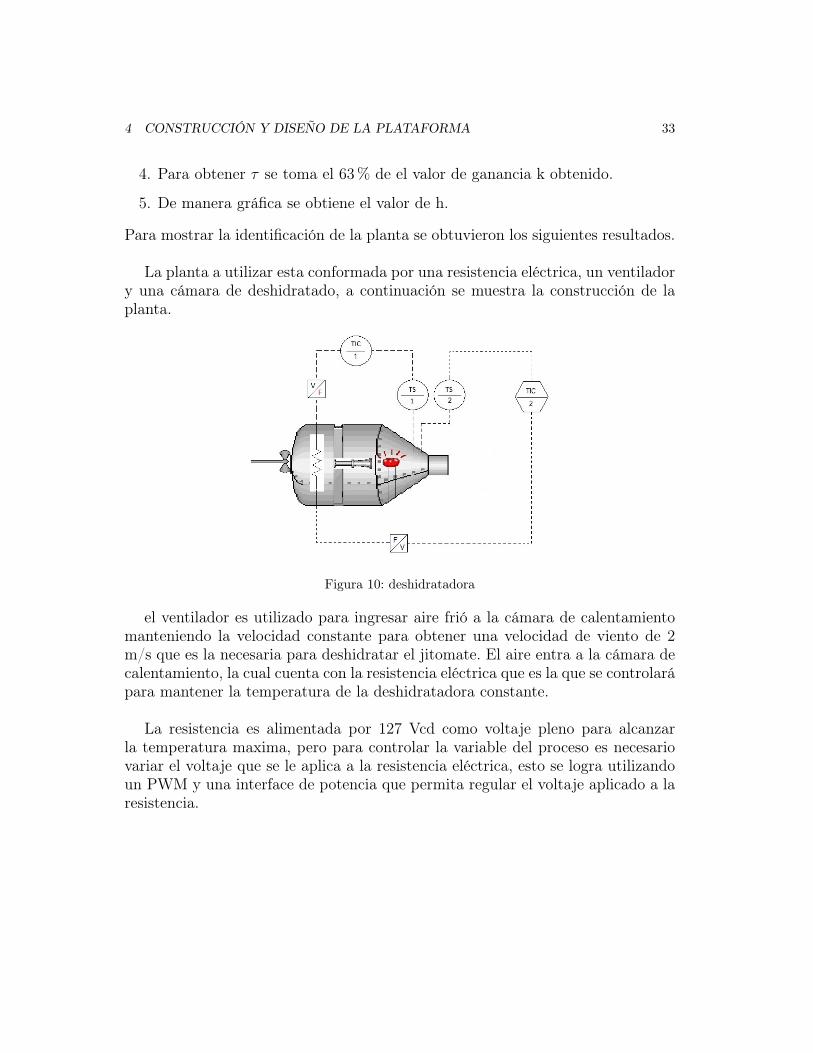
Para mostrar la identificación de la planta se obtuvieron los siguientes resultados.
La planta a utilizar esta conformada por una resistencia eléctrica, un ventiladory una cámara de deshidratado, a continuación se muestra la construcción de laplanta.
Figura 10: deshidratadora
el ventilador es utilizado para ingresar aire frió a la cámara de calentamientomanteniendo la velocidad constante para obtener una velocidad de viento de 2m/s que es la necesaria para deshidratar el jitomate. El aire entra a la cámara decalentamiento, la cual cuenta con la resistencia eléctrica que es la que se controlarápara mantener la temperatura de la deshidratadora constante.
La resistencia es alimentada por 127 Vcd como voltaje pleno para alcanzarla temperatura maxima, pero para controlar la variable del proceso es necesariovariar el voltaje que se le aplica a la resistencia eléctrica, esto se logra utilizandoun PWM y una interface de potencia que permita regular el voltaje aplicado a laresistencia.

4 CONSTRUCCIÓN Y DISEÑO DE LA PLATAFORMA 34
Utilizando un sistema de adquisición de datos se tomaron los datos obtenidosde la planta y esta se muestra a continuación.
Figura 11: Respuesta al escalón
ahora este es el modelo aproximado que se utiliza para que la ley de controlactúe. Es necesario normalizar el valor de la ganancia K ya que la señal escalónaplicada no es unitaria para lo cual se toma el valor máximo y se divide entre elpunto en donde inicio el experimento 0,23
0,85= 0,27058 y este valor sera la ganancia
K de la planta, y la τ es el 63% de la ganancia K sin normalizar.
Como se observa la respuesta de la planta es semejante a la de un sistema deprimer orden, por lo que los parámetros quedan de la siguiente manera.
Y (S)
U(S)=
0,27e−4s
86s+ 1
Por tanto la función de transferencia de la planta es de primer orden conretardo, y es la que se utilizara para diseñar el controlador óptimo.
Los parámetros de esta función de transferencia son muy importantes ya queson los que determinan el comportamiento de la planta, y a si mismo el contro-lador óptimo trabajara directamente sobre ellos y de esto depende el correctofuncionamiento de esta ley de control.

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 35
CAPITULO 5
5. Control óptimo para la plataforma experimental
5.1. Programación dinámica
Un sistema de control se puede representar por la ecuación diferencial 1.
˙X(t) = f(X(t), u(t)), x(t0) = x0, (1)
En donde la función f satisface condiciones adecuadas y el control u(.) pertenecea un conjunto de U de funciones con valores en un subconjunto U de n. Una veselegido el control u ∈ U, el sistema 1 determina una trayectoria o estado x(.) concondición inicial x0 en el momento t0.
Para apreciar mejor esto se tomara un ejemplo para el control de trayectoriade un avion.
tomando en cuenta que el avion tiene condición inicial x(t0), y se desea llegara una condición final x(tf), entonces el estado x(.) podría representar la posicióny velocidad del avion, y el control u(.) representaría la fuerza o aceleración paralograr ese objetivo. Si además de lograr ese objetivo se desea un tiempo mínimoo un mínimo uso de energía, entonases se tiene un problema de control óptimo,para esto se requiere minimizar un índice de desempeño que depende del estadodel sistema y del control llamado funcional de costo.
Ju(.)(t0, x0) = `(x(tf )) +
∫ tf
t0
L(x(t), u(t))dt, (2)
Donde L y ` son funciones que satisfacen condiciones adecuadas.La función Lrepresenta una consecuencia del desplazamiento o el estado x(.) y por la fuerzarealizada u(.) mientras que la función ` representa la penalización por la desviacióndel estado x(tf ) en instante final tf de un estado deseado xf . Si se desea minimizarel tiempo de convergencia tf se debe tomar ` = 0, L=1, y si se desea minimizarel uso de combustible, se puede tomar L(x, u) = u2.
Si un control u∗ es tal que minimiza la funcional de costo, es decir.
Ju∗(.)(t0, x0) ≤ JU
(.)
(t0, x0),∀u(.) ∈ U
Entonces u∗ se denomina control óptimo.En 1957 Richard bellman presentó el método de programación dinámica para
resolver problemas de control óptimo. Este método consiste en reemplazar el prob-lema de optimización para 1,2, el cual contiene una minimización en el espacio U,
5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 36
por una ecuación diferencial en derivadas parciales, llamada ecuación de progra-mación dinámica o ecuación de Hamilton-Jacobi-Bellman.
0 = Vt(t, x) + infu∈U{L(x, u) + Vx(t, x) · f(x, u)}, t ∈ [t0, tf ]x ∈ Rn (3)
que es satisfecha por una función denominada función de valor, la cual se definecomo.
V (t0, x0) = infu(·∈U)
Ju(·)(t0, x0) (4)
Para que la función de Valor 4 satisfaga 3 se necesita que V sea continuamentediferenciable, pero para muchos problemas de control óptimo la función V no esdiferenciable.
5.2. Control predictivo
El control predictivo tiene como objetivo resolver de forma efectiva, problemasde control y automatización de procesos industriales que se caractericen por pre-sentar un comportamiento dinámico complicado, multivariable, y/o inestable. Laestrategia de control en que se basa este tipo de control, es que utiliza el modelomatemático del proceso a controlar para predecir el comportamiento futuro dedicho sistema, y en base a este comportamiento futuro puede predecir la señal decontrol futura.
El control predictivo integra disciplinas como el control óptimo, control estocás-tico, control de procesos con retardo de tiempo, control multivariable, control conrestricciones.
El tipo de control predictivo tratado, es el Control Predictivo Basado en Modelo(CPBM), conocido también como Model Based Predictive Control (MBPC) osimplemente Model Predictive Control (MPC). Esta estrategia también se conocecomo control por horizonte deslizante, por ser ésta la forma en la que se aplicanlas señales de actuación. Existen muchos algoritmos de control predictivo quehan sido aplicados con éxito: GPC, IDCOM, DMC, APC, PFC, EPSAC, RCA,MUSMAR, NPC, UPC, SCAP, HPC, etc.
El control predictivo basado en modelo se puede definir como una estrategia decontrol que se basa en la utilización de forma explícita de un modelo matemáti-co interno del proceso a controlar (modelo de predicción), el cual se utiliza parapredecir la evolución de las variables a controlar a lo largo de un horizonte tem-poral de predicción especificado por el operador, de este modo se puede calcularlas variables manipuladas futuras (señal de control futura) para lograr que en
5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 37
dicho horizonte, las variables controladas converjan en sus respectivos valores dereferencia.
El MPC se enmarca dentro de los controladores óptimos, es decir, aquellos enlos que las actuaciones responden a la optimización de un criterio. El criterio aoptimizar, o función de coste, está relacionado con el comportamiento futuro delsistema, que se predice gracias a un modelo dinámico del mismo, denominadomodelo de predicción.
El intervalo de tiempo futuro que se considera en la optimización se denominahorizonte de predicción. Dado que el comportamiento futuro del sistema dependede las actuaciones que se aplican a lo largo del horizonte de predicción, son éstaslas variables de decisión respecto a las que se optimiza el sistema. La aplicaciónde estas actuaciones sobre el sistema conduce a un control en bucle abierto.
5.2.1. Ley de control óptima
El objetivo del control óptimo es determinar las señales de control que causaranque se satisfagan las limitaciones del proceso físico, y al mismo tiempo minimizaro maximizar algún índice de desempeño.Modelo matemáticoUna parte no trivial de cualquier problema de control es el modelado del pro-ceso. El objetivo es obtener la descripción matemática mas simple que prediceadecuadamente la respuesta del sistema físico a todas las entradas previstas, asícomo se trato en el capitulo 4.

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 38
Se tiene el sistema:
Y (S)
U(S)=Ke−sh
τs+ 1
Se obtiene la transformada inversa de Laplace para obtener su representaciónen espacio de estados.
y(t) = −ay(t) + bu(t− h) (5)
Como se desea minimizar un índice de desempeño, el cual permita el ahorro deenergía se tiene lo siguiente:
J =
∫ h
0
y2Q dt+
∫ ∞h
(y2Q+ u2R) dt
Este índice de desempeño penaliza el estado y el control. Ahora por el prin-cipio de optimalidad la ultima parte de una trayectoria óptima es también unatrayectoria óptima, por lo tanto la ley de control es óptima para todos los puntosen la trayectoria con el índice de desempeño por lo que se tiene:
J =
∫ ∞h
(y2Q+ v2R)dt (6)
Este índice de desempeño minimiza a u(t − h). La ley de control v(t) se puedeobtener por los métodos utilizados en control óptimo libre de retardo, como puedeser utilizando una retroalimentación de estado.
v(t) = −Fy(t) (7)
en donde F = −R−1bP y P para este caso es un escalar el cual debe satisfacerla ecuación de tipo Riccati [16]. Como se observa se tiene en la ecuación 7 endonde se toma en cuanta un ajuste para que cuando la ley de control sea cero,solo se quede con ese ajuste que permitirá que se siga alcanzando la referencia.
U(t) = −Ke(t) + adj
e(t) = sp− y(t)
Se sabe que y(t − h) se encuentra disponible para el controlador por retroal-imentación de estado, así que por medio de la forma de cauchy se encuentra lasolución para el sistema con retardo.

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 39
y(t) = e−a(t0−h)y(t− h) +
∫ t0
t0−he−asbu(s− h)ds
ahora se tiene la ley de control como.
u(t− h) = −Feahy(t− h)− F∫ t
t−he−a(s−t)bu(s− h)ds (8)
En la ley de control representada por la ecuación 8 se observa que se tiene unadependencia de u(s− h) por lo que se realiza lo siguiente.
el termino bu(s−h) se obtiene al despejar de la ecuación 5 sin anti transformar,obteniendo.
bu(s− h) = (y(s)) + ay(s)
Y ahora la ley de control se tiene como:
u(t− h) = −Feahy(t− h)− F∫ t
t−he−a(s−t)[ ˙y(s) + ay(s)]ds
Realizando la multiplicación de la integral se tiene.
u(t− h) = −Feahy((t− h)− F∫ t
t−he−a(s−t) ˙y(s)ds− aF
∫ t
t−he−a(s−t)y(s)ds.
obteniendo esto se realiza la integración por partes del termino F∫ tt−h e
−a(s−t)ds[29], y posterior a esto realizando el procedimiento como [8] obteniendo.
u(t− h) = −Fy(t)− 2aF
∫ 0
−he−asy(t+ s)ds.
debido a que esta ley de control al llegar a la referencia se hace cero, se debeponer un ajuste el cual permite que se mantenga en la referencia la variablecontrolada, para esto se tiene la ley de control como sigue.
u(t− h) = −Fy(t)− 2aF
∫ 0
−he−asy(t+ s)ds+ adj
en donde adj es a∗spb, de esta manera es como se probo en [8], pero debido a
que para este caso se aplica la señal de control sobre la resistencia eléctrica y nosobre los ventiladores, se tiene un comportamiento diferente, para lo cual el adjcambio y se obtuvo como sigue.

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 40
Se requiere que la salida sea igual al set-point.
Y0(t) = sP (t)
Realizando la transformada de la Laplace y sustituyendo los parámetros de laplanta y la salida del sistema se tiene:(
s− a0 + 2abF
(1− e−hs + ha1
s− a
))Y (s) =
(bu0
s
)Con esto se despeja la el control para obtener:
u0(s) =1
b
(s− a0 + 2abF
(1− e−sh+ha1
s− a
))Y (s)
u0 =1
b
(s− a0 + 2abF
(1− e−hs+ha1
s− a
))Y
sp
Y (s)→ Y0(s)
Con esto se aplica el limite por la derecha y el limite por la izquierda.
Y0(s) =sp
s
U0ss = lımt→∞
u0(t) = lıms→0
su0(s)
lıms→0
s
b
(s− a0 + 2abf
(1− e−hs+ha
s− a
))sp
s
Después de aplicar el limite se obtiene la constante de ajuste que se tendrá.
U0ss =
(−a0 + 2abF
(1− e−ha
−a
))sp
b
u0ss =
(a+ bF + 2abF
(e−ha − 1
a
))sp
b
Recordando que a = 1τ
ver apéndice b1.1 para programas de LabVIEW de la ley de control.

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 41
5.3. Análisis de estabilidad
En esta prueba se considera el sistema, el cual considera únicamente lo quesucede en ese sistema sin considerar ninguna alteración como lo pueden ser turbu-lencias, fugas de aire en la planta, absorción de calor de la planta por el materialdel cual esta construido, el cambio climático y muchos otros factores que puedenafectar el comportamiento de la planta de manera considerable. Para la pruebade estabilidad sin perturbaciones se parte del sistema.
˙Y (t) = AY (t) +Bu(t− h) (9)
Sustituyendo la ley de control optima exacta u(t− h) en 9 se tiene:
˙Y (t) = AY (t) +B
[−fY (t)− 2af
∫ h
0
eaτy(t− h)
]dt
Sustituyendo la ley de control optima aproximada en 9 se tiene:
˙Y (t) = AY (t)+B
[−fY (t)− 2af
[h
n
(Y (t) + 2
[n−1∑i=1
eaihn Y
(t− ih
n
)]+ eahY (t− h)
)]](10)
De la ec 10 se pueden reacomodar los términos para simplificar como sigue:
˙Y (t) =m∑i=0
AiY
(t− ih
n
)˙Y (t) =
(A−Bf − 2afbh
n
)Ai =
−2afBh
ne
aihn
Am =
(−2afbh
n
)˙Y (t) =
m∑i=0
AiY
(t− ih
n
)˙Y (t) =
m∑i=0
AiY (t)−m∑i=0
Ai
∫ t
t− ihn
˙Y (s) ds

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 42
Sustituyendo ˙Y (s)
˙Y (t) =m∑i=0
AiY (t)−m∑i=0
Ai
∫ t
t− ihn
m∑i=0
AiY
(S − j h
n
)ds
˙Y (t) =m∑i=0
AiY (t)−m∑i=0
m∑j=0
AiAj
∫ t
t− ihn
Y
(S − j h
n
)ds
Como se observa se tiene un termino dependiente de s, por lo que se realiza uncambio de variable de la siguiente manera.
τ = S − jh
n
si S = t
τ = t− jh
n
si S = t− ihn
τ = t− ih
n− jh
n
Obteniendo.
˙Y (t) =m∑i=0
AiY (t)−m∑i=0
m∑j=0
AiAj
∫ t− jhn
t− ihn− jh
n
Y (τ) dt

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 43
Para probar estabilidad es necesario considerar funcionales de Lyapunov Krasovskyde la siguiente manera.
V (Xt) = V1 (Xt) + V2 (Xt)
Proponiendo las funcionales V1 y V 2
V1 = Y (t)TPY (t)
V2 =m∑i=0
m∑j=0
∫ jhn
+ ihn
jhn
[∫ t
t−sY (τ)TRY (τ) dτ
]ds
Es necesario obtener V1 y V2 por lo pronto se obtiene V1.
V1 = Y (t)TP ˙Y (t) + ˙Y (t)PY (t)
Sustituyendo ˙Y (t)
V1 = Y (t)TP [m∑i=0
AiY (t)−m∑i=0
m∑j=0
AiAj
∫ t− jhn
t− ihn− jh
n
Y (τ)dτ ]+[m∑i=0
AiY (t)−m∑i=0
m∑j=0
AiAj
∫ t− jhn
t− ihn− jh
n
Y (τ)dτ ]TPY (t)
Realizando multiplicación termino a termino.
Vi = Y T (t)Pm∑i=0
AiY (t)−Y (t)Pm∑i=0
m∑j=0
AiAj
∫ t− jhn
t− ihn− jh
n
Y (τ)Tdτ+yT (t)m∑i=0
ATi PY (t)
−m∑i=0
m∑j=0
∫t− ih
n
−jhn
t− jhn
Y (τ)TdτATj ATi PY (t)
Obteniendo V2
V2 =m∑i=0
m∑j=0
∫ jhn
+ ihn
jhn
[∫ t
t−sY T (τ)RY (τ)dτ
]ds
Aplicando la regla de Leibnitz:
V2 =m∑i=0
m∑j=0
[−Y T (t− s)RY (t− s) + Y T (t)RY (t)
∫ jhn
+ ihn
jh
ds
]

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 44
Resolviendo la integral se obtiene:
V2 =m∑i=0
m∑j=0
(−Y T (t− s)RY (t− s)ih
n+ Y T (t)RY (t)
ih
n
)Nuevamente se tiene una dependencia de s por lo que se realiza un cambio de
variable para poder completar V2.
τ = t− sSi
S =jh
n=⇒ τ = t− jh
n
Si
S =jh
n+ih
n=⇒ τ = t− jh
n− ih
n
De esta manera se obtiene V2
V2 =m∑i=0
m∑j=0
[−∫ t− jh
n
t− jhn− ih
n
Y T (τ)RY (τ)dτ + Y TRY (t)ih
n
]Obteniendo V
V = V1 + V2
V =m∑i=0
(Y T (t)
[PAi + Ai
TP +mR
ih
n
]Y (t)
)
+m∑i=0
m∑j=0
∫ t− jhn
t− ihn− ih
n
(Y T )(t)PAiAjY (t) + Y T (τ)AjAiPY (t) + Y T (t)RY (τ)dτ
)Sumando y restando
Y T (t)Pm∑i=0
m∑j=0
ih
nAiAjR
−1AjTAi
TPY (t)
Colocando todos los términos de V

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 45
V =m∑i=0
(Y T (t)
(PAi + Ai
TP +mR
ih
n+
m∑j=0
Pih
nAiAjR
−1AjTAiP
)Y (t)
)
−m∑i=0
m∑j=0
[∫ t− jhn
t− ihn− ih
n
(Y T (t)PAiAjY (τ) + Y T (τ)Aj
TAi
TPY (t)
+Y (t)TRY (τ))dτ + Y (t)TP
ih
nAiAjR
−1AjTAi
TPY (t)
]

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 46
Agrupando términos y factorizando.
V =m∑i=0
(Y T (t)
(PAi + ATi P +mR
ih
n+
m∑j=0
Pih
nAiAjR
−1ATj ATi P
)Y (t)
)
−m∑i=0
m∑j=0
[∫ t−ih
t− jhn− ih
n
(RY (t) + ATj A
Ti PY (t)
)TR−1
(RY (τ) + ATj A
Ti PY (t)
)dτ
]
Y T (t)
(m∑i=0
PAi +m∑i=0
ATi P +m∑i=0
mRih
n+
m∑i=0
m∑i=0
Pih
nAiAjR
−1ATj ATi P
)Y (t)
Para poder probar estabilidad es necesario resolver esta ecuación de Riccati,por lo que nos apoyaremos de Matlab para realizarla y esto se muestra en elapéndice b1.1
5.4. Análisis de estabilidad ante perturbaciones no modeladas
Aquí se analiza la estabilidad ante perturbaciones que no están consideradasen el modelo, como lo pueden ser turbulencias dentro de la deshidratadora, unafuga de aire que se llegue a tener, o alguna perturbación externa al sistema queno se conoce su estructura y pueda afectar a la ley de control para mantener latemperatura de la cámara de deshidratado.
Para esta prueba se tomo como base el sistema 11.˙Y (t) = AY (t) +BU(t− h) (11)
Se sustituye la ley de control exacta.
˙Y (t) = AY (t) +B
[−FY (t)− 2af
∫ h
0
eaτY (t− h)
]La ley de control que esta implementada es una aproximación de la integral de
la ley de control obtenida, que es la que se desea que sea estable.
˙Y (t) = AY (t)+B
[−FY (t)− 2af
[h
n
(Y (t) + 2
[i=1∑n−1
eaihn Y (t− ih
n)
]+ eahY (t− h)
)]]Se realiza la transformación siguiente, y aquí se agrega la perturbación no
modelada, y como no se conoce su estructura, se agrega como F (Y (t)) por queafecta a la salida del sistema.
m∑i=0
AiY (t− ih
n) + F (Y (t)) (12)

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 47
ahora se puede realizar una transformación como la que sigue, para poderformular las condiciones de estabilidad en términos de la existencia de una solucióndefinida positiva para la ecuación de Riccati para la ecuación lineal de la forma.
˙Y (t) =m∑i=0
Y (t)−m∑i=0
Ai
∫ t
t− ihn
˙Y (Θ)dΘ + F (Y (t)) (13)
Se proponen tres funcionales de Lyapunov krasovski.
V (Y ) = V1 + V2 + V3
Las funcionales propuestas quedan como sigue:
V1 = Y (t)TPY (t) (14)
V2 =m∑i=0
∫ t
t− ihn
˙Y (Θ)TATi QiAi ˙Y (Θ)(Θ− t+
ih
n)dΘ (15)
V3
t∑t− ih
n
Y (Θ)TRiY (Θ)dΘ (16)
para V1 se tiene
V1 = Y (t)TPY (t)
Obteniendo V
V1 = ˙Y (t)TPY (t) + Y (t)P ˙Y (t)
T
sustituyendo 13 en V1
V1 =
[m∑i=0
AiY (t)−m∑=0
Ai
∫ t
t− ihn
˙Y (Θ)dΘ + FY (t)
]TPY (t)+
Y (t)P
[m∑i=0
AiY (t)−m∑i=0
Ai
∫ t
t− ihn
˙Y (Θ)dΘ + F (Y (t))
]TAplicando las transpuestas se tiene:
V1 =m∑i=0
Y (t)T AiPY (t)−m∑i=0
Y (t)TPAi
∫ t
t− ihn
˙Y (Θ)dΘ + F (Y (t))TPY (t)
+m∑i=0
Y (t)TPAiY (t)−m∑i=0
Y (t)TPAi
∫ t
t− ihn
˙Y (Θ)dΘ + Y (t)PF (Y (t))T

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 48
agrupando términos semejantes
V1 =m∑i=0
Y (t)T AiPY (t) +m∑i=0
Y (t)TPAiY (t)
− 2m∑i=0
Y (t)TPAi
∫ t
t− ihn
˙Y (Θ)dΘ + F (Y (t))TPY (t) + Y (t)PF (Y (t))T
Si el termino retardado desconocido es constante pero ilimitado, h ∈ [0,∞]La idea de utilizar un sistema con retardo dependiente es utilizar la siguiente
desigualdad. Dados a, b ∈ Rn
−2aT b ≤ η1 ,∞x>0aTXa+ bTX−1b
Se requiere tener una LMI para poder probar la estabilidad del sistema, pero?? no es una LMI es una desigualdad matricial que se expresa y desarrolla de lasiguiente manera.
P∑mi=0
Ai
∫ tt− ih
n
Y (θ)dθ ≤t∫
t− ihn
[Y T (θ)
m∑i=0
ATi Y T (t)P
] [Q Qm
mT Q (mT Q + I)Q−1(Qm + I)
] m∑i=0
Ai Y (θ)
PY (t)
dθ
Realizando multiplicación.
− 2Y (t)TPm∑i=0
Ai
∫ t
t− ihn
˙Y (θ)dθ ≤ [ ˙Y (θ)Tm∑i=0
AiTQ
m∑i=0
Ai ˙Y (θ)dθ+
+Y (t)TPmTm∑i=0
Ai ˙Y (θ)+ ˙Y (θ)T
m∑i=0
AiTQmPY (t)+Y (t)TP (mTQ+I)Q−1(Qm+I)PY (t)]dθ
Transponiendo el termino Y (t)TPmTQ∑mi=0 Ai
˙Y (θ)Entonces se puede reducir la ecuación como sigue.
− 2Y (t)TPm∑i=0
Ai
∫ t
t− ihn
˙Y (θ)dθ ≤m∑i=0
∫ t
t− ihn
[ ˙Y (θ)T
m∑i=0
AiTQ
m∑i=0
Ai ˙Y (θ)dθ+
2Y (t)TPmTQ
m∑i=0
Ai ˙Y (θ) + Y TP (mTQ+ I)Q−1(Qm+ I)PY (t)]dθ
Tomando en cuenta que:∫ t
t− ihn
˙Y (θ)dθ = Y (t)− Y (t− ih
n) (17)

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 49
Tomando en cuenta 17 se sustituye y se tiene.
− 2Y (t)TPm∑i=0
Ai
∫ t
t− ihn
˙Y (θ)dθ ≤m∑i=0
AiTQ
m∑i=0
Ai ˙Y (θ)dθ
+2Y (t)TPmTQ
m∑i=0
Ai(Y (t)−Y (t− ihn
))+∫ t
t− ihn
Y (t)TP (mTQ+I)Q−1(Qm+I)PY (t)dθ
− 2Y (t)TPm∑i=0
Ai
∫ t
t− ihn
˙Y (θ)dθ ≤m∑i=0
∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQ
m∑i=0
˙Y (θ)dθ+
2Y (t)TPmTQ
m∑i=0
AiY (t)︸ ︷︷ ︸− 2Y (tT )PmTQ
m∑i=0
AiY (t− ih
n)︸ ︷︷ ︸
+ Y (t)TP (mTQ + I)Q−1(Qm + I)PY (t)(− ihn
)

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 50
Rescribiendo V1
V1 ≤m∑i=0
Y (t)T AiPY (t) +m∑i=0
Y (t)TPAiY (t) +m∑i=0
∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQ
m∑i=0
Ai ˙Y (θ)dθ+
2Y (t)TPmTQ
m∑i=0
AiY (t)−2y(t)TPmTQ
m∑i=0
AiY (t−h)+Y (t)TP (mTQ+I)Q−1(Qm+I)PY (t)(− ihn
)
+ F (Y (t))TPY (t) + Y (t)TPF (Y (t))
considerandoX = Qmp y Y = ( ihn )Q Se obtiene ˙V 1
V1 ≤
[m∑i=0
AiTP +
m∑i=0
PAi + 2Xm∑i=0
Ai + (X + P )Y(X + P )
]Y (t)
−2Y (t)T XTm∑i=0
AiY (t− ihn
)+F (Y (t))TPY (t)+Y (t)TPF (Y (t))+∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQ
m∑i=0
˙Y (θ)dθ
Ahora se procede a obtener ˙V 1 tomando en cuenta la Ec.15 para obtener V2 se aplica la reglade leibnitz con lo que se obtiene.
V2 =m∑i=0
˙Y (t)TAi
TQiY (t)
(t− ih
n− t+
ih
n
d(t− ihn )
dt
)
+ ˙Y (t)T
m∑i=0
AiQiAi ˙Y (t)(t− ih
n
)−∫ t
t− ihn
˙Y (θ)m∑i=0
ATi QiAi˙Y (θ)dθ
V2 = ˙Y (t)m∑i=0
AiTQiAi ˙Y (t)(
ih
n)−
∫ t
t− ihn
(Y (θ))m∑i=0
ATi QiAi˙Y (θ) (18)
se tiene ˙Y (t) para el caso cuando i=0 con lo que se obtiene.
˙Y (t) = AoY (t) +m∑i=1
AiY (t− ih
n) + F (Y (t)) (19)
Sustituyendo Ec.19 en Ec.18
V2 =
[A0Y (t) +
m∑i=1
AiY (t− ih
n) + F (Y (t)
]T m∑i=0
AiTQiAi
[A0Y (t) +
m∑i=0
AiY (t− ih
n) + F (Y (t))
](ih
n)
−∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQiAi ˙Y (θ)θ

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 51
V2 =
[Y (t)T A0
T+
m∑i=1
Y (t− ih
n)T Ai + F (Y (t))T
]m∑i=0
AiTYAi
[AoY (t) +
m∑i=1
AiY (t− ih
n) + F (Y (t))
](ih
n
)
−∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQiAi ˙Y (θ)dθ
Realizando multiplicación Termino a termino.
V2 = Y (t)T A0T
m∑i=0
AiTYAiA0
T(ih
n)Y (t) + Y (t)T A0
Tm∑i=0
AiTYAi
m∑i=1
Ai(ih
n)Y (t− ih
n)
+ Y (t)T A0T
m∑i=0
AiTYAi(
ih
n)F (Y (t)) +
m∑i=1
Y (t− ih
n)TATi
m∑i=0
AiTYAiA0(
ih
n)Y (t)
+m∑i=1
Y (t− ihn
)T AiT
m∑i=0
AiTYAi
m∑i=1
Ai(ih
n)Y (t− ih
n)+
m∑i=1
Y (t− ihn
)T AiT
m∑i=0
AiTYAi(
ih
n)F (Y (t))
+ F (Y (t))Tm∑i=0
AiTYAiA0(
ih
n)Y (t) + F (Y (t))T
m∑i=0
AiTYAi
m∑i=1
Ai(ih
n)Y (t− ih
n)
+ F (Y (t))Tm∑i=0
AiTYAi(
ih
n)F (Y (t))−
∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQiAi ˙Y (θ)dθ
Para la Ec.16 de igual manera se obtiene la derivada, con lo que se tiene.
V3 = −Y (t− ih
n)TRY (t− ih
n) + Y (t)TRY (t)
por lo tanto teniendo las derivadas de 14,15,16, se procede a sumarlas.
V = V1 + V2 + V3
el resultado de sumar las funcionales es.

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 52
Y (t)T[m∑i=0
AiTP +
m∑i=0
PAi + 2Xm∑i=0
Ai + (X + P )Y(X + P )
]Y (t)
− 2y(t)T XTm∑i=0
AiY (t− ih
n) + F (Y (t))TPY (t) + Y (t)TPF (y(t))
+∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQi
m∑i=0
Ai ˙Y (θ)dθ + Y (t)T A0T
m∑i=0
AiTYAiA0(
ih
n)Y (t)
+ Y (t)T A0
m∑i=0
AiTYAi
m∑i=1
Ai(ih
n)Y(t− ih
n) + Y (t)T A0
Tm∑i=0
AiTYAi(
ih
n)F (Y (t))
+m∑i=1
Y (t− ihn
)T AiT
m∑i=0
AiTYAiA0(
ih
n)Y (t)+
m∑i=1
Y
(t− ih
n
)TAi
TYAi
m∑i=1
Ai
(ih
n
)Y
(t− ih
n
)
+m∑i=1
Y (t− ih
n)T Ai
Tm∑i=0
AiTYAi(
ih
n)F (Y (t)) + FY (t)T
m∑i=0
AiTYAiA0(
ih
n)Y (t)
+ F (Y (t))Tm∑i=0
AiTYAi
m∑i=1
Ai(ih
n)Y (t− ih
n) + F (Y (t))T
m∑i=0
AiTYAi(
ih
n)F (Y (t))
−∫ t
t− ihn
˙Y (θ)m∑i=0
AiTQiAi ˙Y (θ)dθ − Y (t− ih
n)RY (t− ih
n) + Y (t)TRY (t)
Podemos agrupar términos de V .
V = Y (t)T[m∑i=0
AiTP +
m∑i=0
PAi + 2Xm∑i=0
Ai + (X + P )Y(X + P ) + A0T
m∑i=0
AiTYAiA0
(ih
n
)+R
]Y (t)
+Y (t)T[−2XT
m∑i=0
Ai + A0
m∑i=0
AiTYAi
m∑i=1
Ai
(ih
n
)]Y (t− ih
n)+Y (t)T
[P + A0
Tm∑i=0
AiTYAi
(ih
n
)]F (Y (t))
+F (Y (t))T[P +
m∑i=0
AiTYAiA0
(ih
n
)]Y (t)+
m∑i=1
Y
(t− ih
n
)T [Ai
Tm∑i=0
AiTYAiA0
(ih
n
)]Y (t)
+m∑i=1
Y (t− ih
n)T[Ai
Tm∑i=0
ATi YAim∑i=1
Ai
(ih
n
)−R
]Y
(t− ih
n
)
+F (Y (t))T[m∑i=0
AiTYAi
m∑i=0
Ai
(ih
n
)]Y
(t− ih
n
)+F (Y (t))T
[m∑i=0
AiTYAi
(ih
n
)]F (Y (t))
+m∑i=1
Y
(t− ih
n
)[ATi∑
i = 0mATi YAi(ih
n
)]F (Y (t))
Es posible encontrar condiciones suficientes de estabilidad usando el enfoque de LMI, lasfuncionales de Lyapunov Krasovskii y el procedimiento S [2] se puede probar la estabilidad delsistema.

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 53
El procedimiento S es una herramienta de verificación de la no negatividad de una funcióncuadrática bajo restricciones cuadráticas. Si existen al menos dos desigualdades cuadráticas enel conjunto de restricciones, usamos el procedimiento S.
Teorema
‖f(Y (t))‖ ≤ α‖Y (t)‖
‖Y ‖2 = Y TY (20)
Como se observa en 20 se tiene una forma cuadrática, por lo tanto se puede expresar comosigue.
f(Y (t))T f(Y (t)) ≤ α2Y (t)TY (t)
Siguiendo esta forma podemos expresar la ecuación como:
˙V (t) + ε1[α2Y (t)TY (t)− f(Y (t))T f(Y (t))
]< 0; ε1 ≥ 0
Ahora se puede expresar utilizando la forma matricial.
˙V (t) ≤[Y (t)T Y
(t− ih
n
T)
F (Y (t))T] Z11 Z12 Z13
Z21 Z22 Z23
Z31 Z32 Z33
Y (t)Y(t− ih
n
)F (Y (t))
Ahora se puede sustituir cada función de acuerdo a
dotV y obtener.
Z11 =
[m∑i=0
AiTP +
m∑i=0
PAi + 2Xm∑i=0
Ai + (X + P )Y(X + P )
]+A0
Tm∑i=0
YAiA0
(ih
n
)+R+εα2
Z12 = −Xm∑i=0
Ai + A0
m∑i=0
AiTYAi
m∑i=1
Ai
Z13 = P +m∑i=0
AiTYAiA0
(ih
n
)
Z21 =m∑i=1
AiT
m∑i=0
AiTYAiA0 −
m∑i=0
AiTX
Z22 =m∑i=1
AiT
m∑i=0
AiTYAi
(ih
n
)−R
Z23 =m∑i=1
AiT
m∑i=0
Ai
(ih
n
)
Z31 = P +m∑i=0
AiTYAi
(ih
n
)+
m∑i=0
AiTYAi
TYAiA0
(ih
n
)

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 54
Z32 =m∑i=0
AiTYAi
m∑i=1
Ai
(ih
n
)
Z33 =m∑i=0
AiTYAi
(ih
n
)− ε
Aplicando complemento de schur apéndice A.1.
K =[A BB∗ C
]en donde:
K > 0
1. A > 0 y C −B−1A−1B > 0
2. C > 0 y A−BC−1B∗ > 0
del cual se utilizara C > 0 y A−BC−1B∗ > 0
A =
∑mi=0 Ai
TP +
∑mi=0 PAi + XT
∑mi=0 Ai +
∑mi=0 Ai
TX +R+ εα2 −X
∑mi=0 Ai P
−∑mi=0 Ai
TX −R 0
P 0 ε1
BC−1BT =
(xT + P )Y(x+ P ) + A0T ∑m
i=0 YAiA0 A0AiTYAi
∑mi=0 Ai
∑mi=0 Ai
TYAiA0∑m
i=1 AiT ∑m
i=0 AiTYAiA0
∑mi=1 Ai
TYAi
∑mi=1 Ai
∑mi=1 Ai
T ∑mi=0 Ai
TYAi∑m
i=0 AiTY ˜A− iA0
∑mi=0 Ai
TYAi
∑mi=1 Ai
∑mi=1 Ai
TYAi
C =
[Y −1 0
0 Y −1
]C−1 =
[Y 00 Y
]
B =
A0TY −1 (x+ P )∑m
i=0 AiA0Y−1 0∑m
i=0 AiTY −1 0
B =
A0T
h(A0TA1
TY)
A1TA1Y 0
A1TY 0
Obteniendo los parámetros del complemento de schur se puede formar la LMI, obteniendo
lo que sigue.
K =
∑mi=0 Ai
TP+∑mi=0 PAi+X
T ∑mi=0 Ai+
∑mi=0 Ai
TX+R+εAiI −X
∑mi=0 Ai P A0Y
−1 (X+P )
−∑mi=0 Ai
TX −R 0
∑mi=0 AiA0Y−1 0
P 0 −ε1I∑mi=0 Ai
TY−1 0
A0TY−1 ∑m
i=0 AiA0Y−1 ∑mi=0 Ai
TY−1 Y−1 0
(XT+P ) 0 0 0 Y−1
< 0

5 CONTROL ÓPTIMO PARA LA PLATAFORMA EXPERIMENTAL 55
(21)
Partiendo de 21, se puede decir que el sistema descrito por 13 es asintóticamente estable siexiste una matrizW ∈ R, las matrices definidas positivas P,X,R Tal que la LMI 21 se mantiene.
Considerando los parámetros del sistema (pongo sistema) a = 0,011627906, b = 0,003139534h =4, un α = 0,001, y las ganancias del controlador r = 3, q = 1100 con los cuales la LMI es evaluada.
Se sabe que si PyX son simétricas y definidas positivas, la ley de control hace que ladeshidratadora sea asintóticamente estable. Los eigenvalores obtenidos al analizar la LMI son:
P =[
2,5431 00 2,5431
]
X =[
259,4996 00 259,4996
]Como se puede observar los eigenvalores de la LMI son definidos positivos, por lo que el la
ley de control que se implementa hace que la deshidratadora sea asintóticamente estable.
5.5. conclusionesPara el presente trabajo de tesis se busca realizar un deshidratadora de jitomates la cual
implementa como técnica principal de control de temperatura un controlador óptimo. Este con-trolador se implementó satisfactoriamente y permite mantener la temperatura de la cámara dedeshidratado, reduciendo el consumo de energía y evitando saturar de manera brusca el ac-tuador.Los resultados obtenidos fueron comparados con un controlador industrial PID, que esel mas utilizado en la industria actualmente, y se obtuvo un resultado satisfactorio siendo elcontrolador óptimo el que ahorro mayor energía, presento menor saturación en el actuador ymantuvo la temperatura de una manera muy precisa, además de no tener sobre impulso.
Otro punto a tratar en este trabajo fue el tomar en cuenta la influencia que tiene cada con-trol en el deshidratado de jitomates, por lo que se probo el controlador PID y el controladoróptimo para el deshidratado, en este análisis se obtuvo una mayor retención de contenido deconstituyentes químicos con lo que se puede concluir que el no tener sobre impulso ayuda amantener mayor cantidad de componentes químicos en el jitomate.
Como un punto muy importante, se trato el análisis de estabilidad de la ley de controlimplementada. El análisis de estabilidad es para sistemas con retardos, y como primer puntose realizó el análisis de estabilidad de la ley de control, y posteriormente se analizó la ley decontrol pero considerando perturbaciones que no se consideran en el modelo aproximado de laplanta, esto con el objeto de saber si la ley de control responde de manera adecuada ante ambassituaciones. Para poder realizar el análisis de estabilidad se utilizó un enfoque LMI que permiteencontrar condiciones suficientes de estabilidad. Para poder realizar todo el análisis se utilizoun modelo aproximado de la planta, el cual se obtuvo experimentalmente.

6 RESULTADOS EXPERIMENTALES 56
6. Resultados experimentales
6.1. IntroducciónEn este capitulo se muestran los resultados experimentales obtenidos para el control de tem-
peratura de la planta descrita en la sección 4.4, esta planta fue controlada por medio de un PIDindustrial Honeywell y un controlador óptimo programado en el software de instrumentaciónvirtual LabVIEW.
Estos dos controladores fueron probados en la deshidratadora de jitomate, para después com-parar los resultados obtenidos con ambos controladores.
El controlador PID fue sintonizado de dos formas diferentes, la primera fu utilizando lastablas de Ziegler-Nichols, y la segunda forma se realizo mediante el método D-particiones [14]que permite una sintonización robusta del controlador, esto con la finalidad de observar el com-portamiento con ambos casos y tener una buena referencia de comparación para el controlóptimo.
En la primer sección de este capitulo se presentan los resultados obtenidos con la sintonizaciónde Ziegler-Nichols, en la segunda sección se observan los resultados obtenidos con la sintonizaciónrobusta, y en la ultima sección de este capitulo se toman los resultados de la ley de control óptima.
6.2. PID sintonizado mediante tablas de Ziegler-NicholsLa sintonización utilizando las tablas de Ziegler-Nichols,se basa en la obtención del modelo
aproximado para que a partir de este modelo tratado en el capitulo 4 se obtengan la constantede tiempo, la ganancia del sistema y el retardo, que son utilizados para obtener las gananciasdel controlador.
Las ganancias obtenidas mediante este método se muestran en la siguiente tabla.
La deshidratadora fue controlada a temperaturas diferentes, con las ganancias mostradas acontinuación.
Ganancia 1 ValorKp 25.8Ki 3.225Kd 51.6
Tabla 2: Ganancias obtenidas

6 RESULTADOS EXPERIMENTALES 57
Ganancia 1 valorKp 3.9Ki 8Kd 2
Tabla 3: Ganancias introducidas al controlador
Para realizar el control de temperatura con las ganancias de la tabla 3 se coloco una referenciade 60◦C y el controlador PID tubo el comportamiento mostrado en la figura 12.
Figura 12: temperatura controlada sintonización Ziegler-Nichols.
Como se observa se tienen oscilaciones muy cercanas a la temperatura deseada, pero no esun comportamiento muy satisfactorio ya que no se mantiene una temperatura precisa en lacámara de deshidratado, además se presenta una señal de control que oscila, y esto origina queel actuador este sometido a cambios bruscos que ocasionan que este tenga un menor tiempo devida útil.

6 RESULTADOS EXPERIMENTALES 58
Figura 13: Señal de control sintonización Ziegler-Nichols.
para obtener un mejor resultado se sintonizo este mismo controlador de manera robusta ylos resultados obtenidos con esta sintonización se muestran en la siguiente sección.
6.3. PID sintonizado RobustamenteDe acuerdo a los resultados obtenidos mediante la sintonización de Ziegler-Nichols, se utilizo
el método D-particiones para realizar la sintonización que permite mantener un comportamientomas robusto y de esta manera obtener un mejor resultado en el comportamiento del control detemperatura.
Los valores de las ganancias robustas obtenidas son las siguientes:
Ganancia 1 valorKp 50Ki 3Kd 50
Tabla 4: Ganancias de sintonización robusta
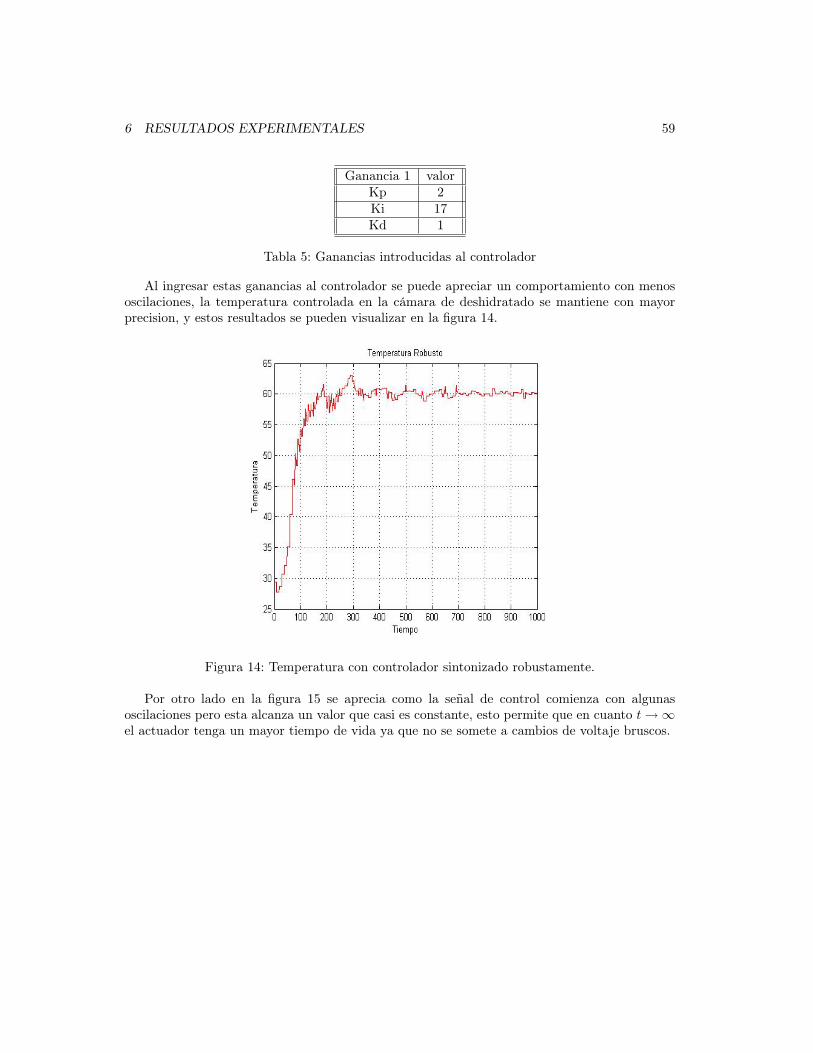
6 RESULTADOS EXPERIMENTALES 59
Ganancia 1 valorKp 2Ki 17Kd 1
Tabla 5: Ganancias introducidas al controlador
Al ingresar estas ganancias al controlador se puede apreciar un comportamiento con menososcilaciones, la temperatura controlada en la cámara de deshidratado se mantiene con mayorprecision, y estos resultados se pueden visualizar en la figura 14.
Figura 14: Temperatura con controlador sintonizado robustamente.
Por otro lado en la figura 15 se aprecia como la señal de control comienza con algunasoscilaciones pero esta alcanza un valor que casi es constante, esto permite que en cuanto t→∞el actuador tenga un mayor tiempo de vida ya que no se somete a cambios de voltaje bruscos.
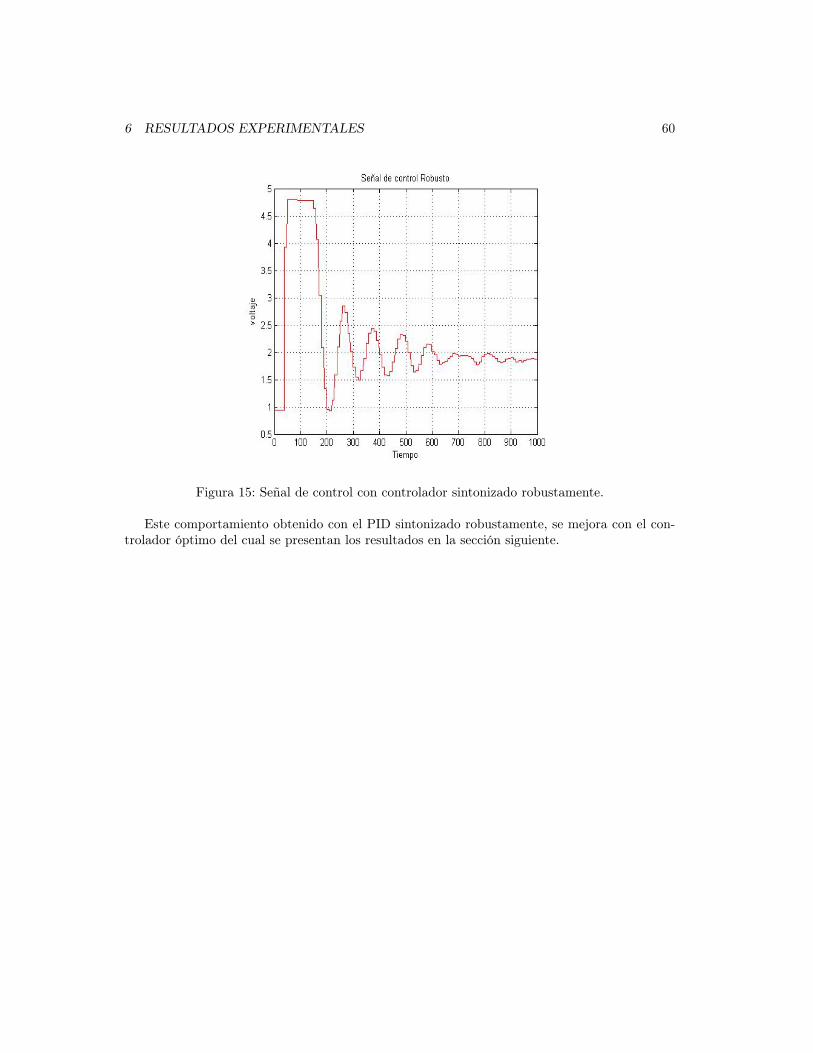
6 RESULTADOS EXPERIMENTALES 60
Figura 15: Señal de control con controlador sintonizado robustamente.
Este comportamiento obtenido con el PID sintonizado robustamente, se mejora con el con-trolador óptimo del cual se presentan los resultados en la sección siguiente.

6 RESULTADOS EXPERIMENTALES 61
6.4. Controlador óptimoPara poder mejorar el comportamiento en cuanto al control de temperatura de la deshidrata-
dora se implemento el controlador óptimo, el cual ofrece un mejor comportamiento, no presentósobre impulso y el actuador no permanece saturado ni es sometido a cambios bruscos.
En las siguientes figuras se muestra el comportamiento obtenido con el controlador óptimo.
Figura 16: Temperatura Controlada óptimamente.
La temperatura tarda un poco mas en alcanzar la referencia, esto a costa de no tener sobreimpulso lo cual da buenos resultados en el deshidratado de jitomates tema que se trata en elcapitulo 7. También es importante señalar que el valor de temperatura alcanzado tiene unaoscilación muy pequeña, es decir se tiene mayor precisión en el valor alcanzado. Otro puntoimportante a tratar es la señal de control que se muestra en la figura17

6 RESULTADOS EXPERIMENTALES 62
Figura 17: Señal de control aplicando control óptimo.
Como se puede observar en la figura 17 en primera instancia se satura el actuador, perode manera muy rápida alcanza un valor mas constante, el cual permite que el actuador no seasometido a cambios abruptos de voltaje ayudando a darle un mayor tiempo de vida.
Como una comparación visual entre las dos formas de sintonizar el PID industrial y elcontrolador óptimo desarrollado, se presenta una figura en la cual se pueden visualizar las tresrespuestas de temperatura y su señal de control respectiva, con lo cual queda mas claro elcomportamiento que se encontró en este trabajo.
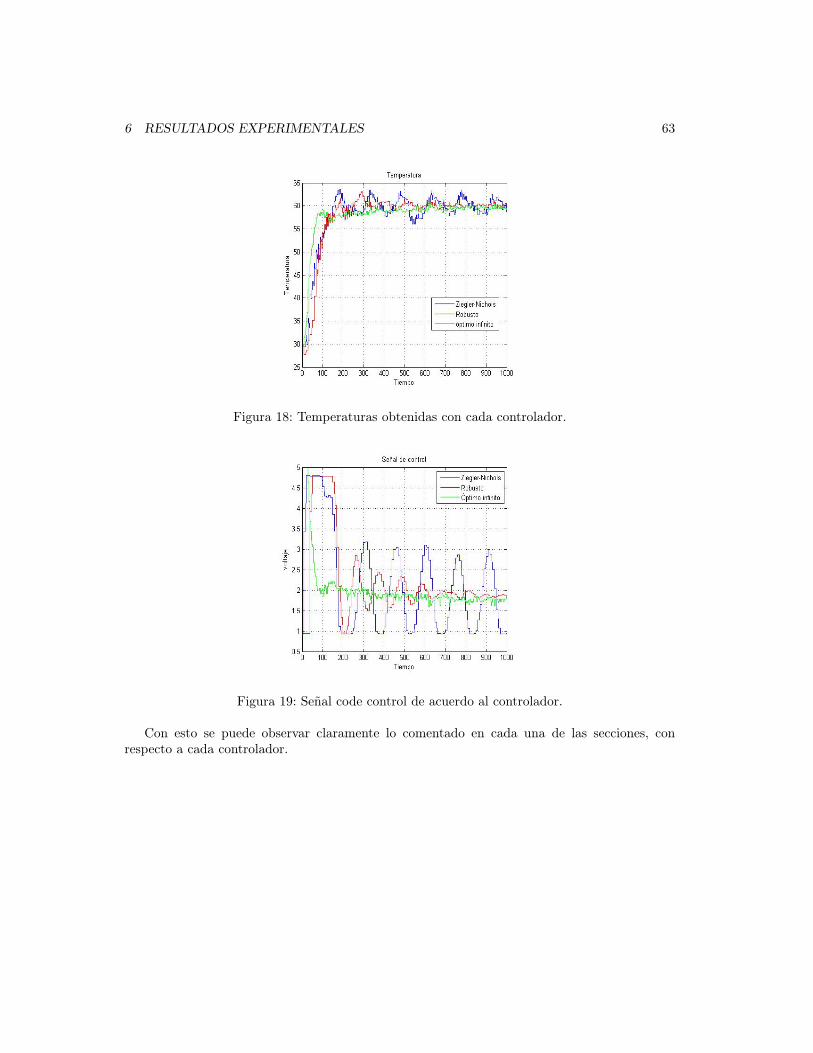
6 RESULTADOS EXPERIMENTALES 63
Figura 18: Temperaturas obtenidas con cada controlador.
Figura 19: Señal code control de acuerdo al controlador.
Con esto se puede observar claramente lo comentado en cada una de las secciones, conrespecto a cada controlador.
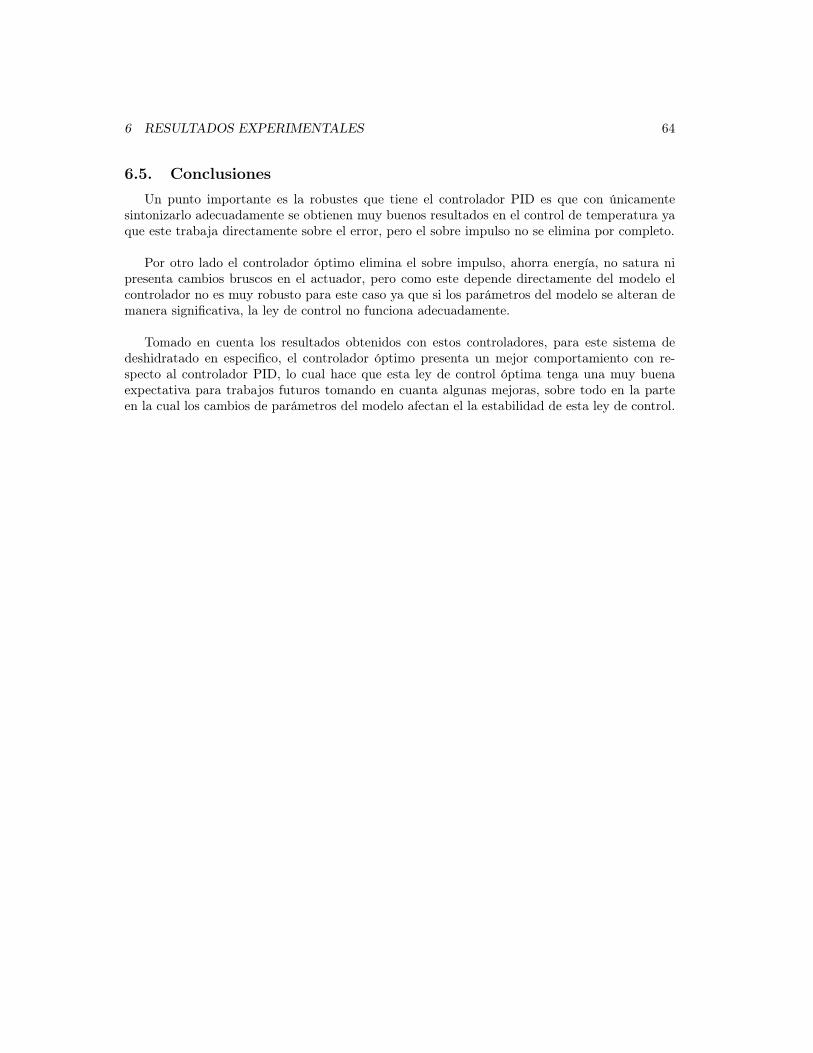
6 RESULTADOS EXPERIMENTALES 64
6.5. ConclusionesUn punto importante es la robustes que tiene el controlador PID es que con únicamente
sintonizarlo adecuadamente se obtienen muy buenos resultados en el control de temperatura yaque este trabaja directamente sobre el error, pero el sobre impulso no se elimina por completo.
Por otro lado el controlador óptimo elimina el sobre impulso, ahorra energía, no satura nipresenta cambios bruscos en el actuador, pero como este depende directamente del modelo elcontrolador no es muy robusto para este caso ya que si los parámetros del modelo se alteran demanera significativa, la ley de control no funciona adecuadamente.
Tomado en cuenta los resultados obtenidos con estos controladores, para este sistema dedeshidratado en especifico, el controlador óptimo presenta un mejor comportamiento con re-specto al controlador PID, lo cual hace que esta ley de control óptima tenga una muy buenaexpectativa para trabajos futuros tomando en cuanta algunas mejoras, sobre todo en la parteen la cual los cambios de parámetros del modelo afectan el la estabilidad de esta ley de control.
7 RESULTADOS ANÁLISIS DE NUTRIENTES 65
CAPITULO 7
7. Resultados análisis de nutrientes
En recientes años los productos de jitomate han ido ganando importancia de-bido a su actividad antioxidante. El jitomate no es la única fuente de nutrientesantioxidantes como las vitaminas A, C y E, pero también contienen una grancantidad de antioxidantes no nutritivos incluyendo los componentes licopeno ypolifenólicos. Los productos de jitomate son la principal fuente de licopeno en ladieta humana. Estudios han mostrado que el licopeno protege contra cáncer depróstata, cáncer de mama, atherosclerosis, reduce la oxidación de una alta densi-dad de lipoproteina y ayuda a reducir los niveles de colesterol en la sangre.
La demanda de una gran cantidad de procesos que utilizan productos de jito-mate incrementa considerablemente, ambos en la venta al pormenor y los ingredi-entes de mercado. Entre los métodos para preservación del jitomate, el secado esuno de los mas convenientes debido que el contenido de agua del producto es muybajo previniendo el desarrollo de microbios y el deterioro del jitomate. Además, elpeso del producto final y el volumen son considerablemente reducidos después dela deshidratación, lo cual puede dar cuenta de importantes ahorros en transportey costos de almacenamiento.
El contenido total de licopeno, ácido ascorbico y polifenoles en el jitomatepueden ser considerados también como buenos indicadores de calidad del proce-so de deshidratado. Durante el proceso térmico del jitomate esos componentesson modificados, afectando el color, la calidad sensorial y funcional del productodeshidratado. Por lo tanto esto es de extrema importancia para minimizar la per-dida de esos componentes durante la deshidratación del jitomate.
El licopeno constituye aproximadamente el 83% de la pigmentación del jito-mate, por lo que su degradación en el proceso térmico puede tener un importanteefecto en el color del producto final también como lo es el valor nutricional y fun-cional.
En [27][5]y en se ha realizado el deshidratado de jitomate a diferentes temper-aturas, pero no se ha puesto cuidado en el tipo de controlador empleado, de talmanera que en esta tesis se realiza el deshidratado de jitomate por medio de uncontrolador óptimo, el cual proporciona un control de temperatura mas suave ypreciso, es por eso que se desea realizar el análisis de nutrientes con este tipo de
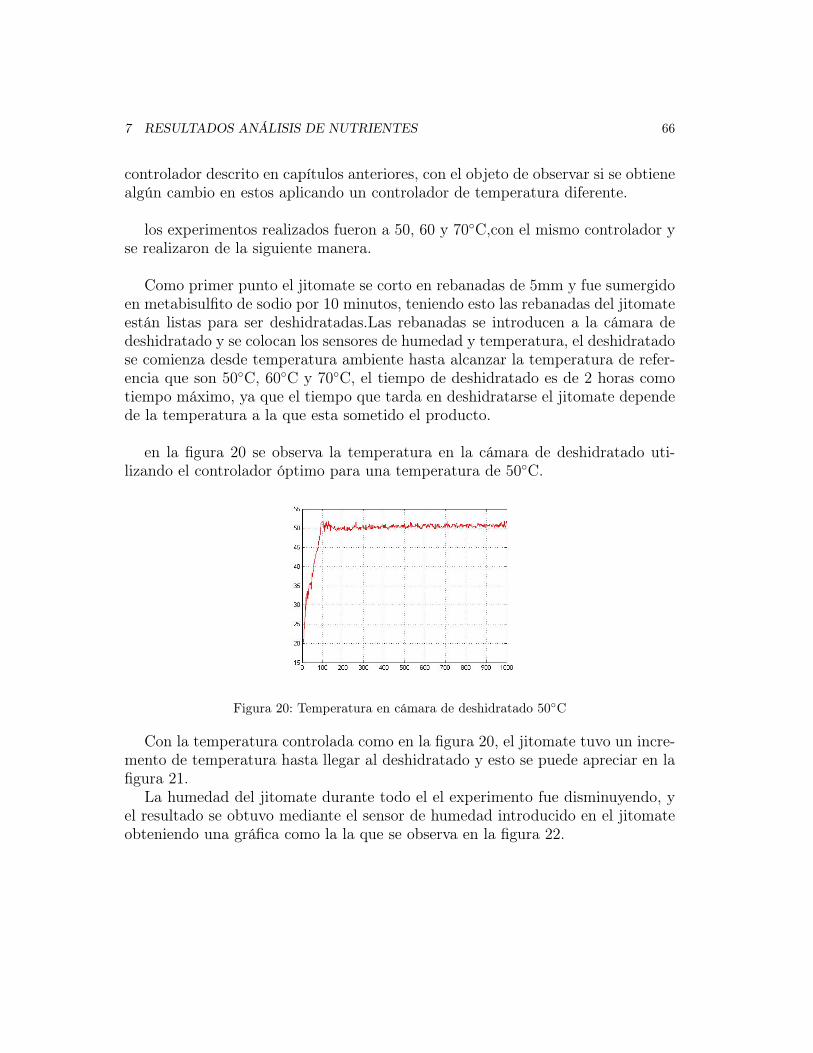
7 RESULTADOS ANÁLISIS DE NUTRIENTES 66
controlador descrito en capítulos anteriores, con el objeto de observar si se obtienealgún cambio en estos aplicando un controlador de temperatura diferente.
los experimentos realizados fueron a 50, 60 y 70◦C,con el mismo controlador yse realizaron de la siguiente manera.
Como primer punto el jitomate se corto en rebanadas de 5mm y fue sumergidoen metabisulfito de sodio por 10 minutos, teniendo esto las rebanadas del jitomateestán listas para ser deshidratadas.Las rebanadas se introducen a la cámara dedeshidratado y se colocan los sensores de humedad y temperatura, el deshidratadose comienza desde temperatura ambiente hasta alcanzar la temperatura de refer-encia que son 50◦C, 60◦C y 70◦C, el tiempo de deshidratado es de 2 horas comotiempo máximo, ya que el tiempo que tarda en deshidratarse el jitomate dependede la temperatura a la que esta sometido el producto.
en la figura 20 se observa la temperatura en la cámara de deshidratado uti-lizando el controlador óptimo para una temperatura de 50◦C.
Figura 20: Temperatura en cámara de deshidratado 50◦C
Con la temperatura controlada como en la figura 20, el jitomate tuvo un incre-mento de temperatura hasta llegar al deshidratado y esto se puede apreciar en lafigura 21.
La humedad del jitomate durante todo el el experimento fue disminuyendo, yel resultado se obtuvo mediante el sensor de humedad introducido en el jitomateobteniendo una gráfica como la la que se observa en la figura 22.
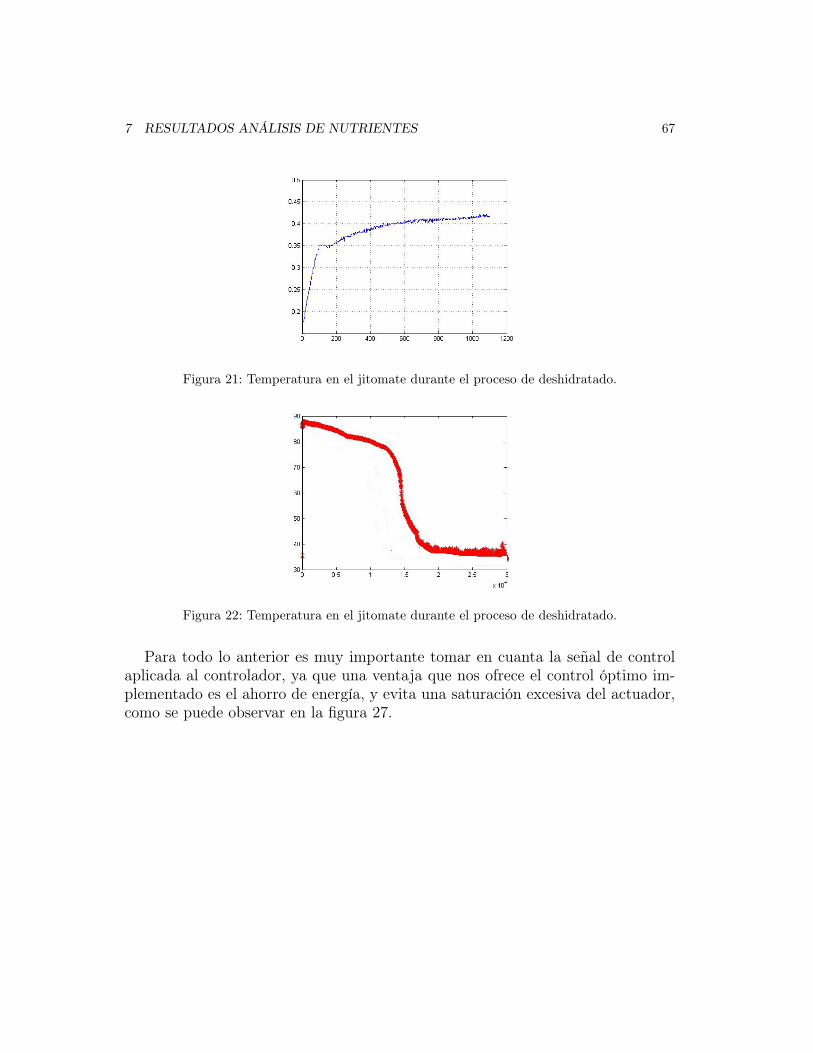
7 RESULTADOS ANÁLISIS DE NUTRIENTES 67
Figura 21: Temperatura en el jitomate durante el proceso de deshidratado.
Figura 22: Temperatura en el jitomate durante el proceso de deshidratado.
Para todo lo anterior es muy importante tomar en cuanta la señal de controlaplicada al controlador, ya que una ventaja que nos ofrece el control óptimo im-plementado es el ahorro de energía, y evita una saturación excesiva del actuador,como se puede observar en la figura 27.
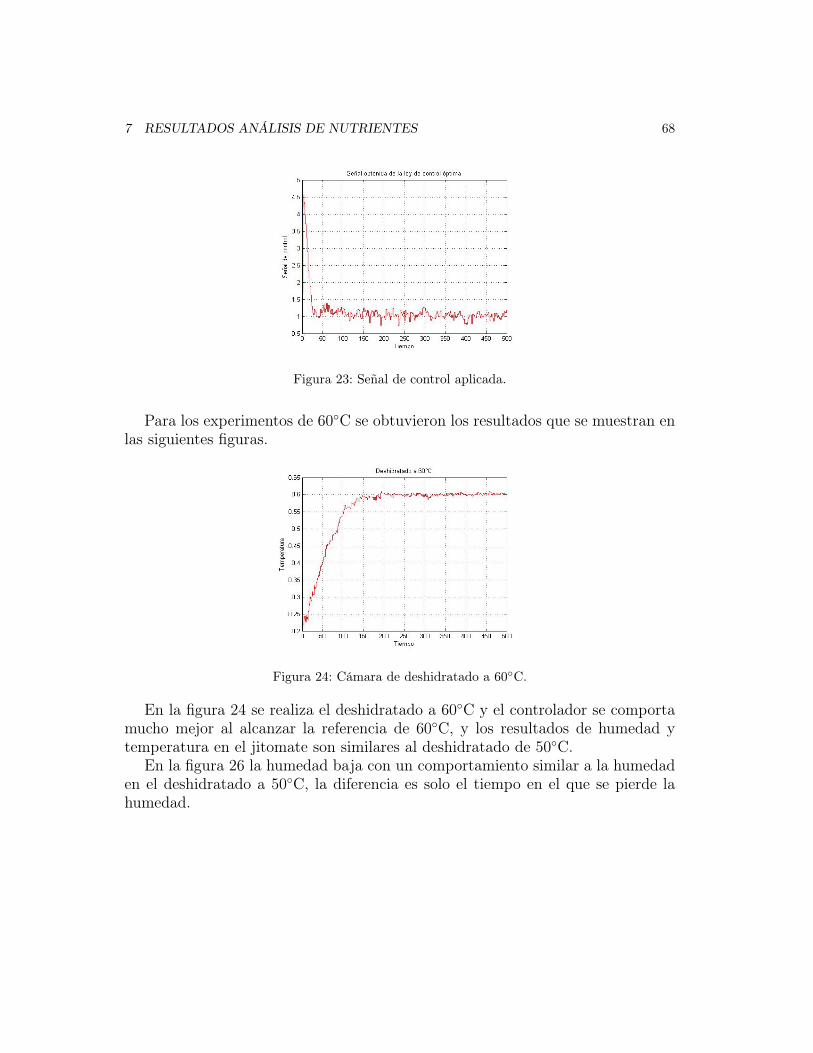
7 RESULTADOS ANÁLISIS DE NUTRIENTES 68
Figura 23: Señal de control aplicada.
Para los experimentos de 60◦C se obtuvieron los resultados que se muestran enlas siguientes figuras.
Figura 24: Cámara de deshidratado a 60◦C.
En la figura 24 se realiza el deshidratado a 60◦C y el controlador se comportamucho mejor al alcanzar la referencia de 60◦C, y los resultados de humedad ytemperatura en el jitomate son similares al deshidratado de 50◦C.
En la figura 26 la humedad baja con un comportamiento similar a la humedaden el deshidratado a 50◦C, la diferencia es solo el tiempo en el que se pierde lahumedad.

7 RESULTADOS ANÁLISIS DE NUTRIENTES 69
Figura 25: Temperatura del jitomate deshidratado a 60◦C.
Figura 26: Humedad de jitomate deshidratado a 60◦C.
La señal de control aplicada para el deshidratado a 60◦C es muy similar a lade 50◦C, por lo que el producto no esta sometido a cambios bruscos de calor loque permite que tenga una temperatura muy constante.
El deshidratado a 60◦C es mucho mas rápido, y las gráficas de temperaturay humedad obtenidas son muy similares a las de 50◦C y 60◦C, pero también serealizo el análisis de nutrientes con el cual se podrá observar que temperatura dedeshidratado es mas eficiente y degrada en una menor cantidad a los nutrientesdel producto.
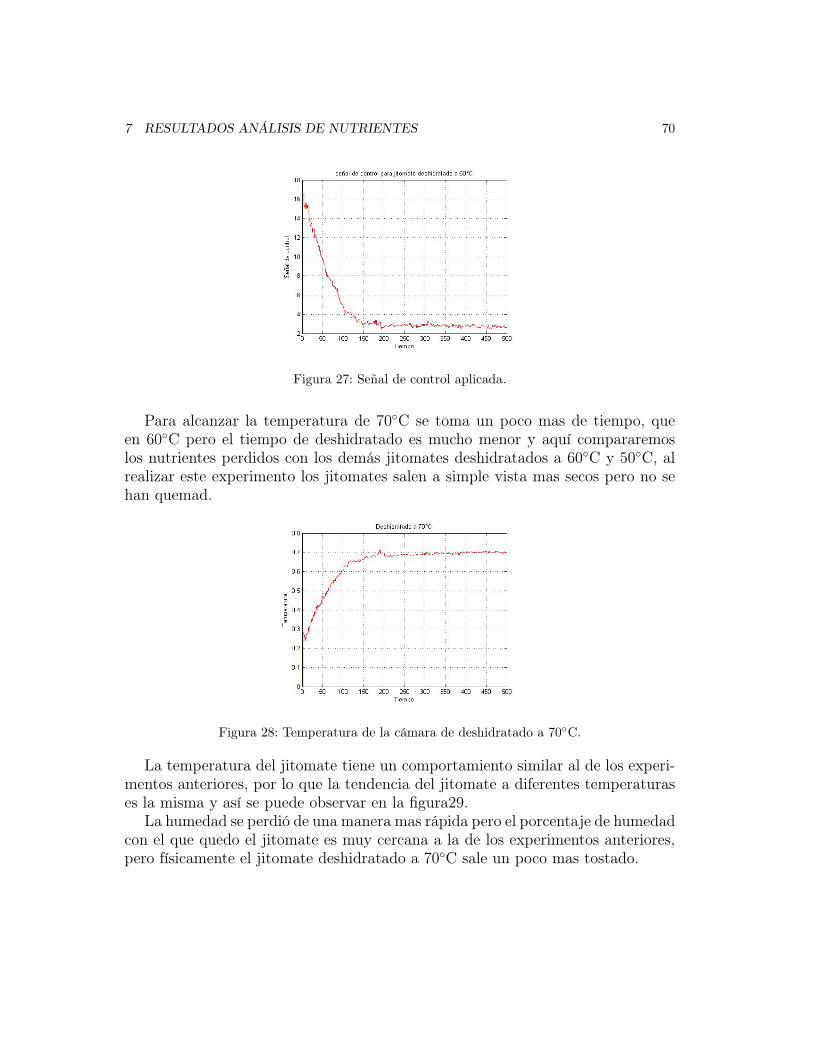
7 RESULTADOS ANÁLISIS DE NUTRIENTES 70
Figura 27: Señal de control aplicada.
Para alcanzar la temperatura de 70◦C se toma un poco mas de tiempo, queen 60◦C pero el tiempo de deshidratado es mucho menor y aquí compararemoslos nutrientes perdidos con los demás jitomates deshidratados a 60◦C y 50◦C, alrealizar este experimento los jitomates salen a simple vista mas secos pero no sehan quemad.
Figura 28: Temperatura de la cámara de deshidratado a 70◦C.
La temperatura del jitomate tiene un comportamiento similar al de los experi-mentos anteriores, por lo que la tendencia del jitomate a diferentes temperaturases la misma y así se puede observar en la figura29.
La humedad se perdió de una manera mas rápida pero el porcentaje de humedadcon el que quedo el jitomate es muy cercana a la de los experimentos anteriores,pero físicamente el jitomate deshidratado a 70◦C sale un poco mas tostado.
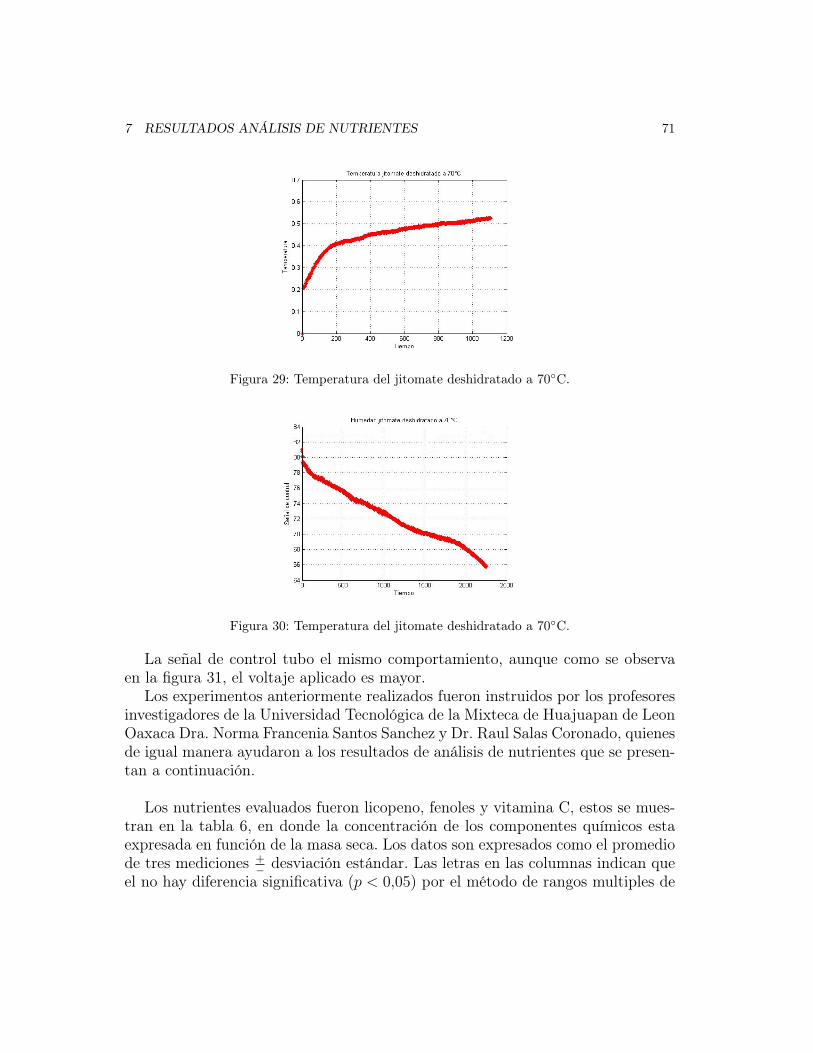
7 RESULTADOS ANÁLISIS DE NUTRIENTES 71
Figura 29: Temperatura del jitomate deshidratado a 70◦C.
Figura 30: Temperatura del jitomate deshidratado a 70◦C.
La señal de control tubo el mismo comportamiento, aunque como se observaen la figura 31, el voltaje aplicado es mayor.
Los experimentos anteriormente realizados fueron instruidos por los profesoresinvestigadores de la Universidad Tecnológica de la Mixteca de Huajuapan de LeonOaxaca Dra. Norma Francenia Santos Sanchez y Dr. Raul Salas Coronado, quienesde igual manera ayudaron a los resultados de análisis de nutrientes que se presen-tan a continuación.
Los nutrientes evaluados fueron licopeno, fenoles y vitamina C, estos se mues-tran en la tabla 6, en donde la concentración de los componentes químicos estaexpresada en función de la masa seca. Los datos son expresados como el promediode tres mediciones +
− desviación estándar. Las letras en las columnas indican queel no hay diferencia significativa (p < 0,05) por el método de rangos multiples de
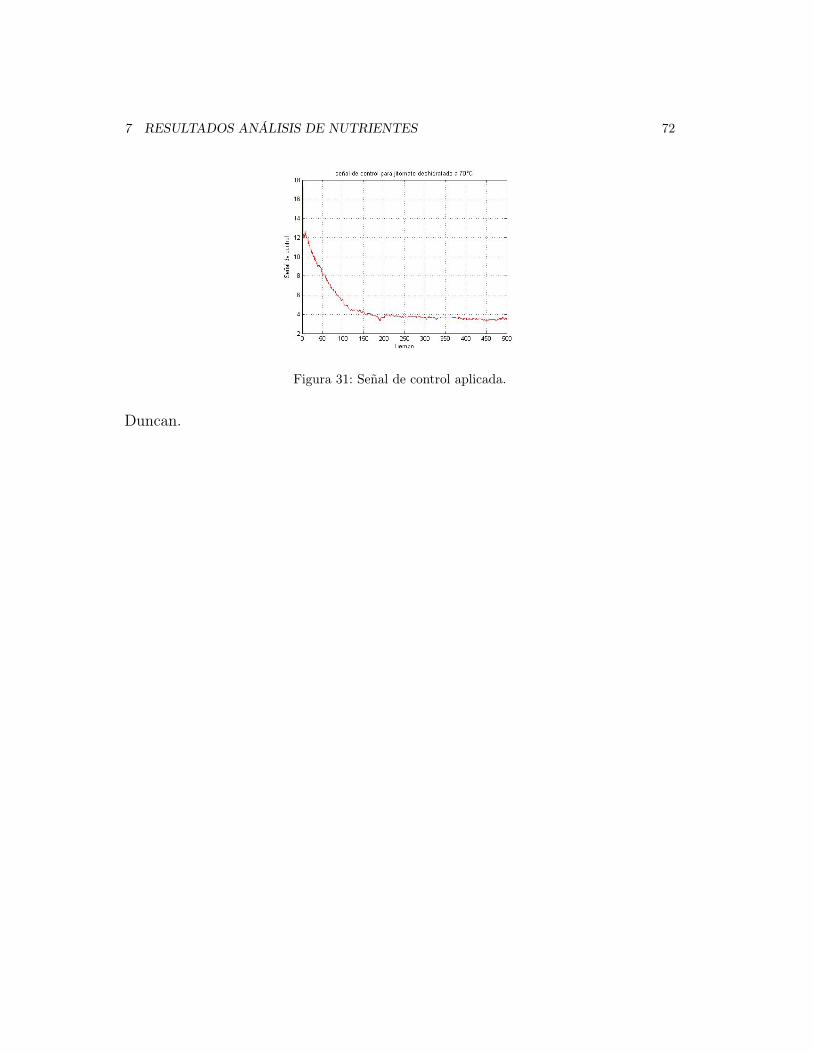
7 RESULTADOS ANÁLISIS DE NUTRIENTES 72
Figura 31: Señal de control aplicada.
Duncan.
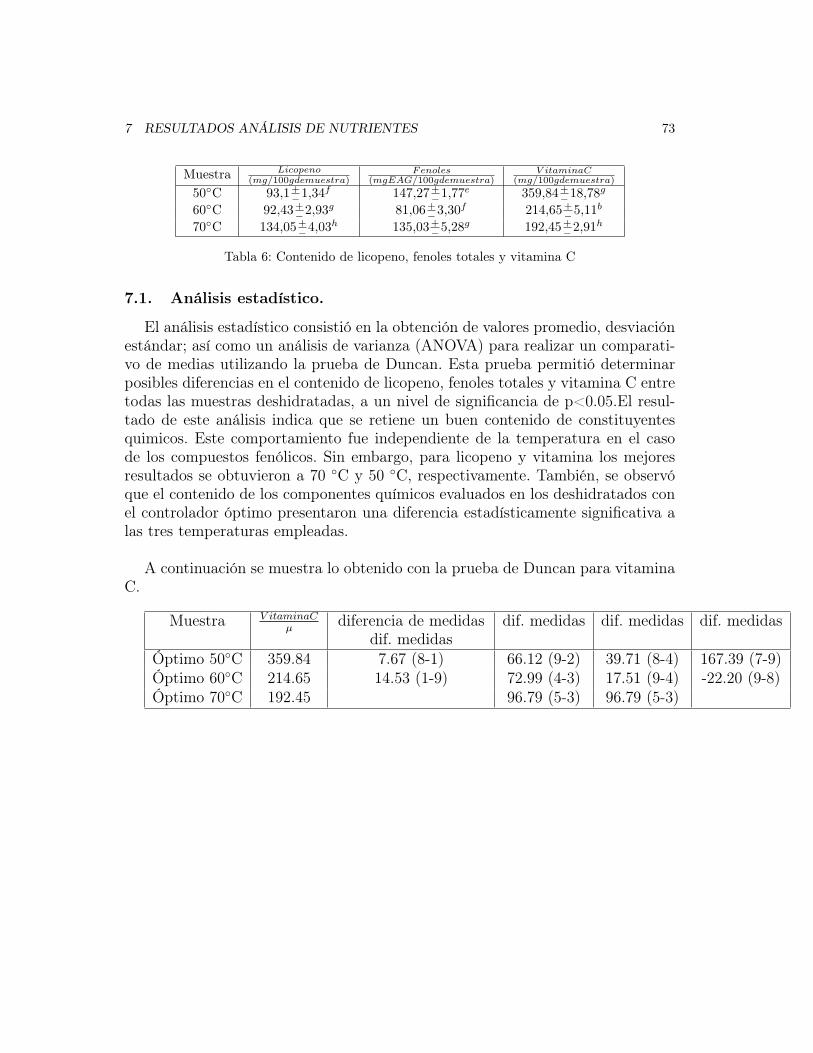
7 RESULTADOS ANÁLISIS DE NUTRIENTES 73
Muestra Licopeno(mg/100gdemuestra)
Fenoles(mgEAG/100gdemuestra)
V itaminaC(mg/100gdemuestra)
50◦C 93,1+−1,34f 147,27+
−1,77e 359,84+−18,78g
60◦C 92,43+−2,93g 81,06+
−3,30f 214,65+−5,11b
70◦C 134,05+−4,03h 135,03+
−5,28g 192,45+−2,91h
Tabla 6: Contenido de licopeno, fenoles totales y vitamina C
7.1. Análisis estadístico.
El análisis estadístico consistió en la obtención de valores promedio, desviaciónestándar; así como un análisis de varianza (ANOVA) para realizar un comparati-vo de medias utilizando la prueba de Duncan. Esta prueba permitió determinarposibles diferencias en el contenido de licopeno, fenoles totales y vitamina C entretodas las muestras deshidratadas, a un nivel de significancia de p<0.05.El resul-tado de este análisis indica que se retiene un buen contenido de constituyentesquimicos. Este comportamiento fue independiente de la temperatura en el casode los compuestos fenólicos. Sin embargo, para licopeno y vitamina los mejoresresultados se obtuvieron a 70 ◦C y 50 ◦C, respectivamente. También, se observóque el contenido de los componentes químicos evaluados en los deshidratados conel controlador óptimo presentaron una diferencia estadísticamente significativa alas tres temperaturas empleadas.
A continuación se muestra lo obtenido con la prueba de Duncan para vitaminaC.
Muestra V itaminaCµ
diferencia de medidasdif. medidas
dif. medidas dif. medidas dif. medidas
Óptimo 50◦C 359.84 7.67 (8-1) 66.12 (9-2) 39.71 (8-4) 167.39 (7-9)Óptimo 60◦C 214.65 14.53 (1-9) 72.99 (4-3) 17.51 (9-4) -22.20 (9-8)Óptimo 70◦C 192.45 96.79 (5-3) 96.79 (5-3)

A REGLAS Y TEOREMAS ÚTILES 74
APÉNDICE 1
A. Reglas y Teoremas útiles
Es muy importante describir algunas herramientas utilizadas en capítulos an-teriores estos son:
A.1. Índice de desempeño
Índice de desempeño aplicado para la ley de control
J =
∫ h
0
y2Q dt+
∫ ∞h
(y2Q+ u2R) dt
A.2. Regla de Leibnitz
d
dx
{∫ α(x)
βx
f(x, t), dt
}=
∫ β(x)
α(x)
δ
δx(f(x, t))dt+f(x, β(x))
δβ(x)
δx−f(x, α(x))
δα(x)
δ(x)
A.3. Complemento de Schur
El complemento de Shur es utilizado para expresar una LMI en términos deuna ecuación de Riccati y también se puede realizar de manera contrario, esteestablece lo siguiente:
Sea k ∈ Cnxn una matriz hermitica, es decir K = KT . Particionado K como:
K =
(A BBT C
)de donde de la condición K = KT se obtiene A = AT y C = CT
K > 0⇐⇒A > 0C −BTA−1B > 0
C > 0A−BC−1BT > 0
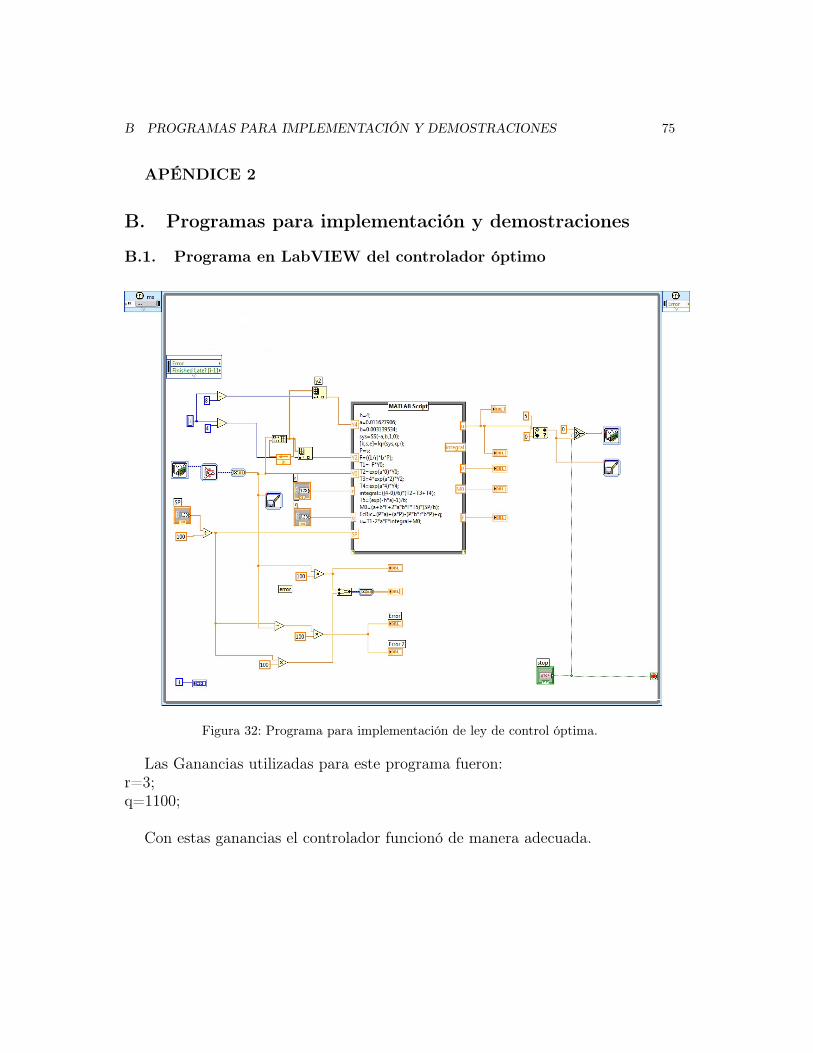
B PROGRAMAS PARA IMPLEMENTACIÓN Y DEMOSTRACIONES 75
APÉNDICE 2
B. Programas para implementación y demostraciones
B.1. Programa en LabVIEW del controlador óptimo
Figura 32: Programa para implementación de ley de control óptima.
Las Ganancias utilizadas para este programa fueron:r=3;q=1100;
Con estas ganancias el controlador funcionó de manera adecuada.

B PROGRAMAS PARA IMPLEMENTACIÓN Y DEMOSTRACIONES 76
B.2. Programa Matlab para solución de ecuación de Riccati
clcclear a l lA=0.011627906;
R=3;Q=1100;ham=[A R;Q −A’ ] ;
[ x1 , x2 , f lag ] = r i c_schr (ham) P=x2/x1
B.3. Programa en Matlab para encontrar la solución de LMI
clcclear a l lA=0.011627906;b=0.003139534;P=0.001;h=4;EP=(A+b∗ ( (1/5)∗b∗P)+2∗A∗b∗ ( (1/5)∗b∗P)∗ (exp(−h∗A)−1)/6)∗(60/b ) ;ALPHA=0.001;R=3;
%−−−−−−−−−−INICIO VARIABLES LMI −−−−−−−−−−−−−−−−−−−−−
s e t lm i s ( [ ] ) ;P=lmivar ( 1 , [ 1 0 ;1 0 ] ) ;X=lmivar ( 1 , [ 1 0 ;1 0 ] ) ;E=lmivar ( 1 , [ 1 0 ;1 0 ] ) ;Yinv=lmivar ( 1 , [ 1 0 ; 1 0 ] ) ;
%−−−−−−−−−−INICIO LMI−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−lmiterm ( [ 1 1 1 P] , . 5 ∗A,1 , ’ s ’ ) ; %LMI #1: A∗P (NON SYMMETRIC?)lmiterm ( [ 1 1 1 P] , . 5 ∗ 1 ,A, ’ s ’ ) ; %LMI #1: P∗A (NON SYMMETRIC?)lmiterm ( [ 1 1 1 X] , . 5 ∗ 1 ,A, ’ s ’ ) ; %LMI #1: X∗A (NON SYMMETRIC?)lmiterm ( [ 1 1 1 X] , . 5 ∗A,1 , ’ s ’ ) ; %LMI #1: A∗X (NON SYMMETRIC?)lmiterm ( [ 1 1 1 0 ] ,R+EP∗ALPHA^2) ; %LMI #1: R+EP∗ALPHA^2lmiterm ( [ 1 2 1 X] ,A,−1) ; %LMI #1: −A∗X
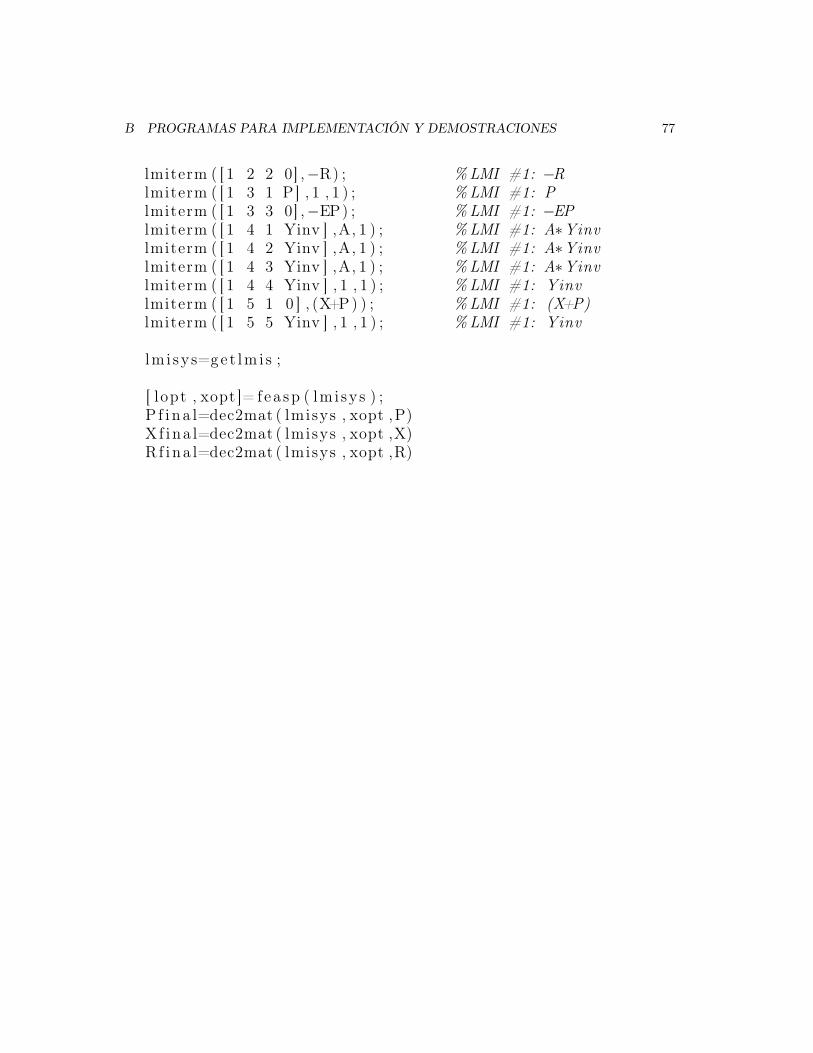
B PROGRAMAS PARA IMPLEMENTACIÓN Y DEMOSTRACIONES 77
lmiterm ( [ 1 2 2 0] ,−R) ; %LMI #1: −Rlmiterm ( [ 1 3 1 P ] , 1 , 1 ) ; %LMI #1: Plmiterm ( [ 1 3 3 0] ,−EP) ; %LMI #1: −EPlmiterm ( [ 1 4 1 Yinv ] ,A, 1 ) ; %LMI #1: A∗Yinvlmiterm ( [ 1 4 2 Yinv ] ,A, 1 ) ; %LMI #1: A∗Yinvlmiterm ( [ 1 4 3 Yinv ] ,A, 1 ) ; %LMI #1: A∗Yinvlmiterm ( [ 1 4 4 Yinv ] , 1 , 1 ) ; %LMI #1: Yinvlmiterm ( [ 1 5 1 0 ] , (X+P) ) ; %LMI #1: (X+P)lmiterm ( [ 1 5 5 Yinv ] , 1 , 1 ) ; %LMI #1: Yinv
lm i sys=ge t lm i s ;
[ lopt , xopt ]= f ea sp ( lmi sys ) ;P f i n a l=dec2mat ( lmisys , xopt ,P)Xf ina l=dec2mat ( lmisys , xopt ,X)Rf ina l=dec2mat ( lmisys , xopt ,R)

REFERENCIAS 78
Referencias
[1] Y. Alekal , P. Brunovsky , D. H. Chyung , and E.B. Lee. The quadraticproblem for systems with time delays. IEEE Transactions on AutomaticControl, 16:673 – 687, 1971.
[2] Yakubovich V. A. S-procedure in nonlinear conrol theory. Vestnik LeningrandUniversity Mathematics, 13:62–77, 1971.
[3] Kequin Gu, Vladimir Kharitonov, Jie Chen. Stability of time delay systems.Springer., 2003.
[4] Edward Giovannucci, Alberto Ascherio, Eric B. Rimm, Meir J. Stampfer,Graham A. Colditz and Walter C. Willett. Intake of carotenoids and retinoin relation to risk of prostate cancer. JNC journal of the national cancerinstitute, 87:1767–1776, 1995.
[5] Mayra Soledad Gómez Gómez, Dr. Raul Salas Coronado. Deshidratado detomate saladete en un secador de charolas giratorias, 2009.
[6] Krzysztof N Waliszewski, DSc, and Gabriela Blasco, MSc. Propiedades nu-traceúticas del licopeno. Salud publica de Mexico., 52:254–265, 2010.
[7] C. M. en C. Angel David Huerta Aguilar, Dr. Omar Jacobo Santos Sanchez,Dr. Omar Lopez Ortega. Análisis de los efectos de distintas estrategias decontrol en una deshidratadora. caso de estudio: jitomate. Master’s thesis,Universidad Autonoma del Estado de Hidalgo, 2012.
[8] M. en C. Liliam Rodrígez Guerrero, Dr. Omar Jacobo Santos Sanchez, Dr.Omar Lopez Ortega. Sistema de optimizacíon y supervicion desarrollado enjava. caso de estudio: proceso de temperatura con retardo. Master’s thesis,Universidad Autonoma del Estado de Hidalgo, 2010.
[9] C.M. en C.Kristyan Freiry Maya Gress, Dr. Omar Jacobo Santos Sanchez,Dr. Virgilio Lopez Morales, Dr. Raul Villafuerte Segura. Identificacion, mod-elado y control difuso de una deshidratadora de alimentos. Master’s thesis,Universidad Autonoma del Estado de Hidalgo, 2012.
[10] Y.A. Fiagbedzi and A.E. Pearson. Feedback stabilization of linear au-tonomous time lag systems. IEEE Transaction on Automatic Control, 31:847–855, 1986.
[11] Barbosa Canovas G.V and Mercado H.V. Dehydration of foods. [S.I] Champ-man & Hall, 1995.

REFERENCIAS 79
[12] J.K. Hale. Effects of delays on on stability and control. Boletín de la SociedadMatemática Mexicana, 5:102–119, 1960.
[13] D.H. Eller,J.K. Aggarwal,and H.T.Banks. Optimal control of linear timedelay systems. IEEE Transaction on Automatic Control, 14:678–687, 1969.
[14] Neimark, Ju. I. D-subdivision and spaces of quasi-polynomials. Journal ofapplied Mathematics and Mechanics, 13:349–380, 1949.
[15] Ziegler, J. and Nichols,Ñ. B. Optimum settings for automatic controllers.Transactions of The American Society of Mechanical Engineers, 64:759 – 768,1942.
[16] R.E. Kalman. Contributions to the theory of optimal control. Boletín de laSociedad Matemática Mexicana, 5:102–119, 1960.
[17] Donald E. Kirk. Optimal control Theory an introduction. Prentice Hall Inc,1970.
[18] N.N. Krasovskii. On analytic design of optimal controllers for systems withtime delays. Prikladnaya Matematika i Mekhanika, 26:39–51, 1962.
[19] Lee,M. Shamsuzzoha, M. and Park,J. Robust pid controller design of timedelay processes whitout zero. In IEEE International International Conferenceon Industrial Technology, 14:2256–2261, 2006.
[20] Malek-Zavarei M. and Jamshidi M. Time delay sytems, analysis, optimizationand applications. North Holland Systems and Control series, 9, 1987.
[21] A.Z. Manitus and A.W. Olbort. Finite spectrum assignment problem forsystems with delays. IEEE Transaction on Automatic Control, 24:541–553,1979.
[22] V. Van Assche, M.Dambrine, and J.F. Lafay. Some problems arising in theimplementation of distributed delay control laws. In proceedings of the 38thConference on Decision and Control, pages 4668–4672, 1999.
[23] E.M. Gutierrez-Arias, J.E.Flores Mena, M.M.Morin-Castillo, and H. Suarez-Ramírez. Design of an óptimal control for an autonomous mobile robot.Revista Mexicana de Fisica., 57:75–83, 2010.
[24] Dan Popescu. suboptimal control of systems with input delay. InternationalCarpathian Control Conference ICCC, 1:259–264, 2002.

REFERENCIAS 80
[25] O.Santos , L. Rodriguez-Guerrero and O. Lopez-Ortega. Experimental re-sults of a control time delay systems using optimal control. Optimal control,Aplications and Methods under review, 8, 1960.
[26] Dietmar Salamon and A. J. Pritchard. The linear - quadratic control problemfor retarded systems with delays in control and observation. IMA Journal ofMathematical Control & Information, 2:335 – 362, 1985.
[27] Norma Francenia Santos-Sanchez, Rogelio Valdez-Blanco, Mayra SoledadGómez-Gómez, Aleyda Pérez-Herrera, Raúl Salas-Coronado*. Effect of ro-tating tray drying on antioxidant components, color and rehydration ratioof tomato saladette slices. LWT-Food Science and Technology, 46:298–304,2011.
[28] O. Santos, S.Mondié and V.L. Kharitonov. Linear quadratic subobtimal con-trol for time delays systems. International Journal of control, 82:147–154,2009.
[29] G. Strang. Calculus. Wellsely-Cambridge Press, 1991.
[30] H. Takatsu and T. Itoh. Future needs for control theory in industry reportof the control technology survey. Control and Cyberneticcs, 38, 2009.
[31] V.L. Karithonov , A.P. Zhabko. Lyapunov-krasovskii approach to the robuststability analysis of time-delay systems. Automatica, 39:15–20, 2003.
[32] M.V. Basin, J.G. Rodriguez Gonzalez,R.Martinez Zuniga. Optimal regulatorfor linear systems with time delays in control input. 1, 1994.








![Autobiografia [erick andrey]](https://static.fdocuments.ec/doc/165x107/55a4390e1a28ab3f5c8b4606/autobiografia-erick-andrey.jpg)