Tesis Desarrollo de un sincrofasor en tiempo real para línea
167
____________________________________________________________ SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN Programa Doctoral ____________________________________________________________ Desarrollo de un sincrofasor en tiempo real para líneas de transmisión eléctrica. Tesis que presenta Armando Rafael San Vicente Cisneros para obtener el Grado de Doctor en Ciencias en la Especialidad de Ingeniería Eléctrica Director de la Tesis: Dr. Raúl Ángel Cortés Mateos México, Distrito Federal 2010 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
-
Upload
milton-vladimir -
Category
Documents
-
view
82 -
download
17
Transcript of Tesis Desarrollo de un sincrofasor en tiempo real para línea

____________________________________________________________
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
Programa Doctoral
____________________________________________________________
Desarrollo de un sincrofasor en tiempo real para
líneas de transmisión eléctrica.
Tesis que presenta
Armando Rafael San Vicente Cisneros
para obtener el Grado de
Doctor en Ciencias
en la Especialidad de
Ingeniería Eléctrica
Director de la Tesis: Dr. Raúl Ángel Cortés Mateos
México, Distrito Federal 2010
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA



Resumen
Se describen los algoritmos computacionales, el método de medición, el diseño y la
implementación de un sincrofasor; el cual mide en tiempo real el ángulo de desfase
entre una misma señal o entre dos o más señales de energía eléctrica que se encuentran
ubicadas en puntos distantes. El sincrofasor consiste en un sistema Ground Position
System (GPS), un Procesador de Señales Digitales (DSP) y una computadora (PC). EL
GPS genera un pulso para sincronizar la medición, el DSP calcula la amplitud y el
ángulo de las señales con respecto al pulso de sincronía, la computadora PC recibe los
ángulos y amplitudes del DSP, hace procesamiento, almacenamiento y realiza el cálculo
del desfase. También se describe un algoritmo para detección de fallas de sobrecorriente
en menos de un cuarto del período basado en las variaciones del ángulo del fasor.

Abstract
Development of a synchrophasor for the measurement of electric transmission line in
real time.
The computational algorithm, the measurement method, the design and the
synchrophasor implementation which measures in real time the angle of diphase
between the same signal or in between two or more electric energy signals that are
located in distant spots, are described. The synchrophasor consists on a Ground Position
System (GPS), a Digital Signals Processor (DSP) and a computer (PC). The GPS
generates a pulse to synchronize the measurement; the DSP calculates the amplitude and
the signals angle with respect to the synchrony pulse. The PC computer receives the
angle and amplitude measurements from the DSP, then it process the information, save
it and carry out the phase angle calculation. An Algorithm for Instant Overcurrent
Relays Based on the Angle Variations of Current Phasor line is also described.

Temario
Resumen.
1. Introducción. 1.1. Planteamiento del problema 1-1
1.2. Estado del Arte. 1-2
1.3. Objetivos. 1-5
1.4. Justificación. 1-5
1.5. Aportaciones. 1-5
1.6. Organización de la tesis. 1-6
2. Desarrollo de algoritmos en tiempo real. 2.1. Algoritmo para el cálculo del fasor. 2-1
2.2. Algoritmo para relevadores de sobrecorriente instantaneos
basado en la variación del ángulo del fasor de corriente.. 2-9
3. Implementación del instrumento. 3.1. Estado actual: 3-1
3.2. Cálculo del fasor. 3-4
3.3. Medición de los ángulos de desfase. 3-5
3.4. Requerimientos para la implementación de un sicrofasor. 3-7
3.5. Especificaciones del sincrofasor a implementar. 3-16
3.6. Selección y justificación de componentes. 3-20
3.7. Pruebas y calibración de sensores y acondicionadores de señal. 3-30
3.8. Integración del subsistema de sensores y acondicionamiento
de señal con el ADC del DSP. 3-37
3.9. Pruebas del sistema GPS. 3-38
3.10. Integración de los subsistemas GPS, DSP y PC 3-47
3.11. Desarrollo de software 3-49
4. Pruebas y resultados. 4.1 Prueba para la medición del desfase. 4-1
4.2 Pruebas de desfase de los sensores y acondicionadores de señal. 4-4
4.3 Pruebas del sistema conectado a una línea de transmisión a escala
de 120 volts.1 4-8
4.4 Análisis comparativo con equipos comerciales. 4-16
Conclusiones. 5-1
Referencias.

Apéndices. A1. Análisis de la señal.
A2. Artículos
A.2.1. DSP-Microcontroller Implementations of a Simplified
Algorithm for Synchrophasor Calculation.
A.2.2. Construcción de un sincrofasor de bajo costo basado
en un DSP-Controlador.
A.2.3. Synchrophasor Design Based on a DSP-Microcontroller.
A.2.4. Algorithm for Instant Overcurrent Relays Based on
the Angle Variations of Current Phasor
Índice de figuras
Figura Tema Página
1 Sincronización de la medición 1 -2
2.1 Diagrama a bloques del sistema de pruebas del algoritmo 2-6
2.2 Señales observadas en el osciloscopio, 1PPS y señal de referencia 2-7
2.3 Diferencia en la medición de magnitud. 2-7
2.4 Diferencia en la medición del ángulo. 2-8
2.5 Error de fase y amplitud que se produce cuando la frecuencia de la
señal es diferente de 60 Hz, (Obtenida de [68]).
2-10
2.6 Error de fase en una señal que varía de 59.8 a 60.2 Hz. 2-11
2.7 Diferencia de los ángulos periodo a periodo 2-11
2.8 Diferencia de los ángulos periodo a periodo con diferentes
amplitudes y en diferentes instantes
2-12
2.9 Zones of angular variation period to period with a failure of the
6.45% of amplitude.
2-13
2.10 Distintas diferencias angulares. La diferencia angular periodo a
periodo es la que más variación tiene cuando se presenta una falla.
2-13
2.11 Variación angular en fallas presentes entre 90 y 270 grados 2-14
2.12 Variación angular en fallas presentes entre 225 y 135 grados 2-15
3.1 Sistema de medición 3-2
3.2 Sistema eléctrico con la asignación de un nodo de referencia 3-3
3.3 Convención de signos en el flujo de potencia 3-3
3.4 Línea corta de transmisión 3-3
3.5 Circuito equivalente de una línea de transmisión 3-4
3.6 Niveles de posprocesamiento 3-5
3.7 Cálculo del ángulo de desfase 3-6
3.8 Sincronización de la medición 3-6
3.9 Proceso general del medidor 3-7
3.10 Diagrama a bloques general del sincrofasor 3-8
3.11 Acondicionador de señales 3-9
3.12 Acondicionador de nivel 3-9
3.13 Métodos para la atenuación: a) Con elementos activos, b) Con
elementos pasivos.
3-10
3.14 Circuito atenuador con filtro pasa bajas 3-10

3.15 Circuito offset a) mediante un circuito integrado voltaje de
referencia, b) mediante un divisor de voltaje
3-11
3.16 Sistema con procesador digital: a) Clasificación de periféricos, b)
Diagrama a bloques más general
3-13
3.17 Sistema mínimo 3-13
3.18 Detección del 1PPS: a) Por Poleo, b) Por Interrupción 3-14
3.19 Sistema de comunicación serial: a) Requerimiento óptimo, b)
Requerimiento mínimo
3-15
3.20 Sistema Procesador Digital 3-15
3.21 Diseño a bloques de la arquitectura del sincrofasor 3-20
3.22 Arquitectura del LC2407A [40] 3-21
3.23 Diagrama a bloques del modulo eZdspTM
LF2407 [43] 3-23
3.24 Opciones para la comunicación entre dispositivos seriales. 3-25
3.25 Sistema completo de comunicación. 3-25
3.26 Diagrama de bode del filtro del TP. 3-26
3.27 Atenuador de corriente y filtro 3-27
3.28 Diagrama de bode del filtro del TC 3-28
3.29 Diagrama a bloques detallado 3-29
3.30 Proceso de acondicionamiento del sensor de voltaje. 3-30
3.31 Conexión de la fuente de voltaje de referencia offset con la señal
de voltaje.
3-30
3.32 Circuito de la fuente de voltaje de referencia offset. 3-31
3.33 Circuito del sensor de voltaje y su acondicionador 3-31
3.34 Forma de onda de la señal de voltaje calibrada 3-32
3.35 Proceso de acondicionamiento del sensor de corriente 3-33
3.36 Circuito del sensor de corriente y su acondicionador 3-33
3.37 Forma de onda de la señal de corriente calibrada 3-34
3.38 Subsistema de sensores y acondicionamiento de señal 3-35
3.39 Diagramas de Bode de los filtros a) TP b) TC. 3-36
3.40 Proceso de integración y prueba 3-38
3.41 Visualización de la trama NMEA y el 1PPS 3-40
3.42 Visualización de las señales 1PPS de dos receptores GPS. 3-41
3.43 Sincronía entre 1PPS, Trama NMEA y señal de 60Hz a digitalizar 3-42
3.44 Proceso sincronizado de la medición 3-43
3.45 Modo cero 3-44
3.46 Modo uno 3-44
3.47 Modo dos 3-44
3.48 Modos de operación del multiplexor 3-45
3.49 Diagrama a bloques del MUX utilizando el AT89C2051 3-45
3.50 Diagrama de flujo y código del programa del multiplexor 3-46
3.51 Diagrama esquemático de la interconexión GPS, DSP, MUX y PC 3-48
3.52 Diagrama de flujo del programa principal 3-51
3.53 Diagrama de flujo de la rutina de servicio de la interrupción
externa XINT1
3-52
3.54 Diagrama de flujo de la rutina de servicio de la interrupción del
ADC
3-53
3.55 Diagrama de flujo de la detección de flujo de la trama NMEA 3-53
4.1 Diagrama a bloques del sistema de pruebas del desfase 4-1
4.2 Red de atraso 4-2
4.3 Oscilograma para un desfase de 1° indicado en el procesador 4-3

central
4.4 Oscilograma para un máximo desfase de la red de atraso (28.08°). 4-3
4.5 Oscilograma para un desfase de 28° indicados en el procesador
central
4-4
4.6 Diagrama del circuito de prueba de los TP´s 4-5
4.7 Comparativo entre las señales de dos TP´s 4-5
4.8 Diagrama del circuito de prueba de los TC’s 4-6
4.9 Comparativo entre las señlales dos TC´s 4-6
4.10 Diagrama del circuito de prueba de un TP y un TC 4-7
4.11 Comparativo entre las señales de un TP y un TC 4-7
4.12 Prueba de los sincrofasores conectados una misma fase 4-8
4.13 Prueba de los sincrofasores conectados una misma fase, con una
conexión invertida
4-9
4.14 Línea de transmisión a escala de 120 volts 4-9
4.15 Conexión de los sincrofasores con la línea de transmisión a escala 4-10
4.16 Conexión de los sincrofasores con la línea de transmisión a escala 4-11
4.17 Corriente de entrada vs corriente de salida 4-12
4.18 Voltaje de entrada vs voltaje de salida 4-13
4.19 Voltaje de salida vs corriente de salida 4-14
4.20 Voltaje de entrada vs corriente de entrada 4-15
4.21 Error en magnitud para una línea trifásica balanceada a frecuencia
nominal (figura tomada de [65])
4-17
4.22 Error de magnitud 4-17
4.23 Sincronización entre la señal de 1 PPS y la señal eléctrica (figura
tomada de [65])
4-17
4.24 Error de ángulo 4-18
Índice de tablas
Tabla Tema Página
2.1 Tabla de senos y cosenos 2-4
2.2 Cálculo de la amplitud 2-4
2.3 Tabla del arcsin 2-6
2.4 Diferencia angular 2-12
3.1 Especificaciones generales del sistema 3-17
3.2 Especificaciones del subsistema GPS 3-17
3.3 Especificaciones de los sensores, del filtro, atenuadores y offset. 3-18
3.4 Especificaciones del ADC y Sistema Digital 3-19
3.5 Características del los periféricos del LC2407A [56] 3-22
3.6 Especificaciones técnicas del módulo ACE III GPS™ [48] 3-24
3.7 Conector heder de 8 terminales 3-38
3.8 Características del estándar NMEA 0183 3-39
3.9 Parámetros de la trama GGA del estándar NMEA 0183 [48] 3-39
3.10 Lenguajes de programación para el TMS320LF2407 3-49

Capítulo 1 - 1
Capítulo 1
Introducción
1.1 Planteamiento del problema
En la transmisión de energía eléctrica a través de líneas de transmisión y de otros
elementos de la red eléctrica, se producen desfases no conocidos entre las señales de
corriente y voltaje. Estos desfases se deben a las cargas y a los flujos de energía,
El problema consiste en poder medir el desfase que presenta una misma señal eléctrica
en dos puntos distantes.
En la interconexión de dos o más generadores de energía eléctrica, se requiere que las
señales de voltaje se encuentren en fase antes de ser interconectados a la red eléctrica.
El problema consiste en poder medir el desfase entre dos señales eléctricas de voltaje
diferentes que se encuentra en dos puntos remotos.
La medición de las amplitudes en las señales eléctricas distantes resulta sencilla ya que
en estos casos los voltajes que entregan los sensores de voltajes y corrientes se miden
con la misma referencia de voltaje que es tierra o cero volts. Para el caso de la medición
del desfase se requiere también de una misma referencia, pero en este caso es temporal.
Con un mismo instrumento se pueden medir el desfase de una misma señal o de dos
señales diferentes de manera local, ya que ambas señales se están midiendo con la
misma referencia temporal del propio instrumento. Esta referencia temporal que genera
el instrumento está únicamente referenciada con el tiempo en que fue energizado. Es
decir que, es aleatoria.
Para el caso de dos puntos remotos, resulta imposible hacer mediciones de fase con el
mismo instrumento en un mismo tiempo. Si se utilizan dos instrumentos diferentes,
cada una de las señales remotas quedaran referenciadas temporalmente a su propio
instrumento.
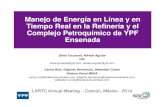
Partiendo de los razonamientos anteriores, el problema de medir el desfase en dos
puntos remotos ya sea de la misma señal o de señales diferentes, se reduce a poder
sincronizar ambos instrumentos con la misma referencia temporal. Es decir realizar una
medición sincronizada del fasor como se puede apreciar en la figura 1., en donde, en
cada nodo se hace una medición de amplitud “V” con un ángulo de fase “” en el
mismo instante de tiempo.

Capítulo 1 - 2
Figura 1. Sincronización de la medición
Además de la medición de flujos de potencia, la medición del fasor sincronizada tiene
actualmente diversas aplicaciones [1, 2], entre otras en relevadores de protección y en el
control de FACTS (flexible AC transmission systems). En el siguiente apartado Estado
de Arte se describen los avances que existen en la medición sincronizada del fasor.
1.2 Estado del Arte
En 1983 Phadke y Thorp [1] proponen una técnica para la medición de la amplitud y
fase de una señal eléctrica. En el cálculo se aplica la transformada discreta de Fourier
(DFT) a un conjunto de muestras obtenidas de una ventana del tamaño de un periodo.
La DFT es el algoritmo más utilizado actualmente en el desarrollo de medidores
fasoriales.
En 1988 se desarrolla en el Tecnológico de Virginia la primer Unidad de Medición
Fasorial (PMU) sincronizada mediante un pulso de reloj proveniente de un sistema
satelital de posicionamiento global (GPS) [3]
En 1992 se instala por primera vez un sistema sincronizado vía GPS a una línea de
transmisión de 500kV [4].
En 1993 el sistema GPS (que en su inicio fue de uso exclusivamente militar) es
declarado para uso civil, con esto se inicia el desarrollo y la comercialización de
medidores fasoriales sincronizados vía GPS [5, 6, 7]. Siendo la empresa Macrodyne la
primer empresa en comercializarlos. En este periodo también se producen diversas
aplicaciones y publicaciones de los experimentos y experiencias generados durante la
instalación de los primeros medidores [8, 9, 10, 11, 12, 13].
En 1995 se desarrolla el estándar IEEE 1344 en el cual se denomina a la PMU
sincronizada mediante un GPS como Sincrofasor. En el mismo estándar se define el
formato de los datos de salida de un Sincrofasor. En el 2001 se reafirma dicho estándar
[14,15].
Para el año 2002 se estima que ya hay más de una centena de sincrofasores en sus
diversas aplicaciones instalados alrededor del mundo y con algunas empresas
desarrollando equipos [3, 16, 17, 18].

Capítulo 1 - 3
El 17 de agosto del 2007 se concede la patente MX 248117 titulada “Rele protector con
capacidad sincronizada de medición de fasor para el uso en sistemas de energía
eléctrica”a la empresa Schweitzer Engineering Laboratories, INC. Y resumen lo
siguiente : “Se describe un sistema relé que obtiene valores de voltaje y corriente a
partir de una línea de energía y utiliza un primer elemento de muestreo para muestrear
los valores de voltaje y corriente a intervalos de tiempo seleccionados. Las señales
muestreadas resultantes son utilizadas para la protección, control, monitoreo y
medición en amplitud de sistema de energía. Las señales muestreadas son luego
muestreadas nuevamente a una velocidad que es seleccionada de un múltiplo de la
frecuencia del sistema de energía. Los resultados del re-muestreo son procesados por el
conjunto de circuitos de procesamiento para las funciones de protección incluyendo las
determinaciones de falla”.
Actualmente además de Macrodyne, inc. (www.macrodyneusa.com) y Schweitzer
Engineering Laboratorios (SEL) (www.selinc.com), existen otras empresas con el
mayor número de equipos instalados: Arbit Systems (www.arbiter.com), AMETEK
Power Instruments (www.ametek.com) [19]. La compañía SEL cuenta con dispositivos
equipados con la función de medida de fasores sincronizados reportando frecuencias
medidas a través del sistema eléctrico de potencia de los Estados Unidos de
Norteamérica y Monterrey México [20, 21, 22].
En enero del 2008 se publica el primer libro relacionado con el tema: [23] Phadke, A.
G.; Thorp, J. S. Synchronized Phasor Measurements and Their Applications. Springer,
New York, January 2008. Los autores del libro son los que más artículos han publicado
al respecto. El libro en esencia es una ontología de dichos artículos.
El elevado costo de los sincrofasores comerciales es uno de los aspectos más
importantes a destacar, por ejemplo, el modelo básico que maneja la empresa
Schweitzer Engineering Laboratorios el SEL 734 con la única función de medición
fasorial con todas las opciones que incluyen software y conectores tiene un precio
$6,865US. El equipo más completo de la misma empresa, el SEL 421 con todas las
opciones y que incluyen funciones de automatización y protección tiene un precio
$11,696US [24]. Por otro lado la empresa Arbiter Systems cuenta con el Analizador de
Potencia modelo 1133a que tiene un costo de $5,165 US sin incluir el software y
accesorios [25]. Los precios anteriores fueron consultados directamente de las páginas
de los fabricantes o de cotizaciones solicitadas, sin embargo, en la referencia [21]
página 2 se menciona un costo por nodo de $24,000 USD por sincrofasor dedicado.
Los 20 años de desarrollo tecnológico en sincrofasores se manifiestan en el modelo SEL
421que es uno de los ejemplos más destacados del avance tecnológico que hay en esta
materia. Éste incorpora a parte de la función de medición fasorial el sistema de
protección de línea de alta velocidad, automatización, control y protección de líneas de
transmisión con funciones de distancia y direccionales de alta velocidad [24].
Información no publicada:
Analizando con detalle las referencias antes citadas se aprecia que preferentemente se
utiliza la DFT para el cálculo del fasor y para la sincronización se utiliza el Sistema de
Posicionamiento Global (GPS). En cuanto a la construcción de un sincrofasor, el mayor
detalle se presenta en la referencia [13] en la cual se describe mediante un diagrama a

Capítulo 1 - 4
bloques la construcción del sincrofasor Macrodyne modelo 1690, en donde se aprecia
que el equipo fue desarrollado con un microprocesador 68030. Sin embargo no hay
ninguna referencia en la que se indique con detalle el algoritmo computacional que
desarrolla la DFT [26, 27, 28, 29]. No se menciona como se establece el algoritmo de
sincronización entre el GPS y el sistema Adquisición de datos – Microprocesador,
tampoco hay descripción (ni aún a nivel de diagramas de flujo) del desarrollo del
software de los algoritmos de cálculos matemáticos, de los algoritmos de sincronización
entre los diversos periféricos y tampoco hay descripción de los algoritmos de
comunicación entre el microprocesador, el GPS y la PC. En cuanto al hardware, como
ya se mencionó, la descripción se reduce a diagramas a bloques. En resumen, no hay un
Know How [30] para el desarrollo y la constricción de un sincrofasor.
1.2.1 Antecedentes del desarrollo de PMU sincronizados dentro de la
SEPI.
Se presenta este antecedente derivado de las propuestas de mejora del comité de tesis en
la reunión de examen cerrado.
En dicha reunión se presentó el desarrollo de un prototipo de sincrofasor al cual
denominó sincrofasor SF_SEPI 1. Este sincrofasor se desarrolló para la medición de los
fasores trifásicos de voltaje y de corriente en estado estacionario de una línea de
transmisión de energía eléctrica. En el prototipo SF_SEPI 1 se calculan en tiempo real
los seis fasores, utilizando una ventana de un período por cada señal cada vez que se
detecta el 1PPS del GPS. Se captura el estampado de tiempo y se transmiten cada
segundo a la computadora PC . La computadora recibe la información de dos
dispositivos SF_SEPI 1 y calcula fuera de línea el rms , las potencias, el factor de
potencia y los ángulos de desfase entre señales (δ) con el estampado de tiempo.
Para la validación de la información entregada en dicho desarrollo, se decidió
implementar otro prototipo basándose en la documentación generada. El siguiente
prototipo basado en la información entregada, fue desarrollado como trabajo de tesis de
maestría por el Ing. Carlos Cuvas, a este prototipo se le denominó SF_SEPI 2, El
prototipo SF_SEPI 2 calcula las componentes reales e imaginarias de las seis señales,
se transmiten a una PC y se calculan fuera de línea (no en tiempo real) los fasores, la
frecuencia y las potencias. Cabe mencionar que en estos trabajos se consideraron y
utilizaron algunas normas y estándares, sobre todo el estándar IEEE 1344. Sin embargo
se dieron como válidas y no se hizo una comprobación experimental. En el trabajo
presentado “ Implementación de un PMU Normalizado“ de la Ing Blanca Verónica
Hernández Gómez se realiza dicha comprobación.
Propuesta.
Dentro de las propuestas derivadas de la reunión con el comité de tesis, se planteó como
mejora del SF_SEPI 1 el de ampliar las aplicaciones al estado dinámico y no
solamente en estado estacionario como se propuso originalmente. Dadas las
características de rapidez de algoritmo y el desarrollo embebido en un solo circuito
integrado (Embedded on-chip systems) se plantea la posibilidad de emigrar el PMU a
un PMCU (phasor measurement and control unit). Este tipo de dispositivos además de

Capítulo 1 - 5
las funciones del sincrofasor, incorpora funciones de monitoreo y /o protección de las
líneas de transmisión [3, 4].
1.3 Objetivos
1. Desarrollar un algoritmo de medición fasorial en tiempo real.
2. Desarrollar un algoritmo para protección de sobrecorriente instantánea basado
en las variaciones angulares del fasor de corriente.
3. Diseñar y construir un sincrofasor.
4. Probar el funcionamiento del sincrofasor, midiendo la amplitud y la fase de las
señales de voltaje y corriente en los extremos de una línea de transmisión
trifásica real o a escala.
1.4 Justificación
La dependencia tecnológica es sin duda uno de los factores que más influyen en el
desarrollo y retraso económico de un país [31, 32]. En México el avance tecnológico en
el área de sincrofasores tiene un rezago de por lo menos 20 años, con el desarrollo de
esta tesis además de que se acorta dicho rezago, se logra un importante abatimiento en
el costo del sincrofasor, a $1000 US aproximadamente. Además de que el desarrollo
tecnológico es el principal catalizador y precursor de la creación de nuevas líneas de
investigación.
Es durante el desarrollo tecnológico en donde se generan las verdaderas necesidades de
investigación. El desarrollo tecnológico permite posicionarse en el estado del arte de las
cosas, además de que permite comprobar la valides y utilidad de las teorías y además
también permite validar la factibilidad de los algoritmos matemáticos con las
tecnologías actuales. El desarrollo tecnológico es necesario, tiene importancia y no es
sencillo.
El desarrollo tecnológico propuesto en esta tesis permitirá a estudiantes e investigadores
generar nuevos algoritmos matemáticos y computacionales para la medición monitoreo,
protección y control de sistemas eléctricos. Los algoritmos tendrán la posibilidad de ser
probados en campo, se podrán abordar y generar tecnologías en otras aplicaciones tales
como protecciones, relevadores a distancia, control de FACTS, calidad de la energía y
otra descritas en los documentos referenciados en el apartado Estado del Arte. Por
último, con el desarrollo de esta tesis se abre la posibilidad de poder generar fuentes de

Capítulo 1 - 6
trabajo, recursos económicos y financiamiento para otros proyectos de investigación
básica.
1.5 Aportaciones
Las aportaciones más importantes que se presentan son:
Desarrollo original de un algoritmo computacional en tiempo real para el cálculo
de la DFT, que mediante el uso de tablas (Look Up Tables) permite el cálculo
del ángulo en cuatro instrucciones de lenguaje ensamblador.
Desarrollo original de un algoritmo para protección instantánea de sobre
corriente (en menos de un cuarto del periodo) basado en las variaciones
angulares del fasor de corriente.
Sistema de desarrollo para el diseño de instrumentos de protección, monitoreo y
control de sistemas eléctrico.
Publicación y presentación de artículos en congresos internacionales IEEE:
o “Algorithm for Instant Overcurrent Relays Based on the Angle
Variations of Current Phasor”,San Vicente, R.; Cortés, R.; Robles, J.;
Chong-Quero J.E IEEE International Conference on Industrial
Technology (ICIT 2008)
o “DSP-Microcontroller Implementations of a Simplified Algorithm
for Synchrophasor Calculation” Rafael San Vicente, Raúl Cortés,
Jaime Robles, J. Enrique Chong-Quero IEEE 2nd
International
Conference on Electrical and Electronics Engineering and XI conference
on Electrical Engineering (ICEEE-CIE 2005).
o “Synchrophasor Design Based on a DSP-Microcontroller” San
Vicente, R.; Cortés, R.; Robles, J.; Chong-Quero, J.E. IEEE International
Symposium on Intelligent Signal Processing (WISP’2005).
Patente en tramite:
o “Sistema de desarrollo para el diseño de instrumentos de protección,
monitoreo y control de sistemas eléctrico” (Development system for
instruments design of protection, monitoring and control of electric
systems.) con el bufete jurídico Uhthoff gomez vega & uhthoff, s.c
propiedad intelectual y derechos corporativos (Hamburgo 260 col.
Juárez CP 06600 D.F. México tel. +52(55) 5533 5060)
Presentación en el programa "eXpressDSP™-Compliant Third-Party
Algorithms" de Texas Instruments del algoritmo XDAIS Medición de RMS.

Capítulo 1 - 7
Documentación del desarrollo del sincrofasor.
o Requerimientos para la implementación.
o Alternativas de solución.
o Especificaciones del sistema.
o Diagrama a bloques del sistema.
o Diagrama esquemático del circuito.
o Diagrama de ensamblado del sistema.
El proceso de cómputo sincronizado.
o Diagrama de flujo del proceso de cómputo.
o Diagrama de flujo del programa.
1.6 Organización de la tesis
En el capítulo 2 se presenta el desarrollo del algoritmo computacional en tiempo real
para el cálculo de la DFT, que mediante el uso de tablas (Look Up Tables) permite el
cálculo del ángulo en cuatro instrucciones de lenguaje ensamblador. También se
presenta el desarrollo de un algoritmo para protección de sobre corriente instantánea
(en menos de un cuarto del periodo) basado en las variaciones angulares del fasor de
corriente.
En el capítulo3 se presenta la implementación del sincrofasor. En el apartado Estado
actual, se describe con detalle la información que hay al respecto, esta información se
utiliza como punto de partida. En el apartado requerimientos para la implementación se
identifican los subsistemas mínimos necesario para la implementación. Se presentan las
especificaciones del sincrofasor a implementar y a partir de éstas se selección y
justificación de componentes. Se describe la integración y las pruebas de los siguientes
subsistemas:
Pruebas y calibración de sensores y acondicionadores de señal.
Integración de sensores y acondicionadores de señal con el ADC del DSP
Pruebas del sistema GPS.
Integración de los subsistemas GPS, DSP y PC.
Desarrollo de software
En el capítulo 4 se presentan las pruebas que se hicieron al algoritmo computacional y
al sistema completo. Con la finalidad de medir la exactitud del algoritmo computacional
propuesto las pruebas se realizaron directamente con el DSP interconectado al GPS sin
utilizar las etapas de sensores y acondicionamiento de señal. Se presentan también las
pruebas realizadas al conectar el sistema de dos sincrofasores a una línea de transmisión
de 120 volts a escala. Finalmente se presenta un comparativo del sincrofasor
desarrollado en este trabajo con otros sincrofasores comerciales.

Capítulo 2 - 1
Capítulo 2
Desarrollo de algoritmos en tiempo real
2.1 Algoritmo para el cálculo del fasor
Todos los medidores fasoriales en servicio utilizan el algoritmo recursivo de la DFT
para el cálculo del fasor, no se utiliza el algoritmo FFT ya que este requiere 2n muestras
de la ventana de datos, donde n es un entero positivo, además de que se requieren tener
todas las muestras antes de hacer los cálculos, mientras que con el algoritmo DFT se
pueden utilizar cualquier número de muestras (no necesariamente potencias de 2 como
en el caso de la FFT). Con la DFT se pueden hacer los cálculos en forma recursiva, es
decir que en cada adquisición se puede calcular el fasor. Se ha encontrado que con un
muestreo de 12 adquisiciones por periodo se puede calcular el fasor con la exactitud
requerida en las diversas aplicaciones, los relevadores de protección digitales utilizan
periodos de muestreo de entre 4fo y 40fo [6, 7, 8, 9]
Si la frecuencia varia, se presenta un error el cálculo del fasor entonado a 60Hz, esto se
debe a que los datos muestreados en la ventana de tiempo de anchura fija no
corresponden a un ciclo entero de la señal y por lo tanto, no se satisface la condición de
periodicidad de señal de la transformada de Fourier. En las referencias [20, 33, 34, 35,
36, 37] se describen otros algoritmos o métodos para discriminar los errores por
variación de de frecuencia, armónicos o componentes de CD, algunos de estos aspectos
como los armónicos de alta frecuencia y las componentes de CD se han minimizado
mediante el acondicionador de señal. Por otro lado, si se considera que la variación de la
frecuencia afecta de la misma forma a dos o más UMP en los extremos de una misma
línea de transmisión eléctrica, entonces el error se anula entre ellos, además de que en
un sistema eléctrico la frecuencia varía muy poco. El método de la DFT es inmune a
harmónicos múltiplos de 60Hz
Algoritmo matemático.
Para la medición de la amplitud y fase de una señal eléctrica se aplica la DFT a un
conjunto de muestras obtenidas de una ventana del tamaño de un periodo.
Una señal cosenoidal esta representada en su forma polar o fasorial por
A (2.1)
y

Capítulo 2 - 2
22
ir ZZA (2.2)
r
i
Z
Zarctan
(2.3)
(2.4)
(2.5)
En donde las nX son cada una de las muestras y N es el número de muestras obtenidas
en la ventana de un periodo, para la implementación que aquí se presenta se escogió un
número de 16 muestras, siendo el mínimo aceptable de 12 [2]. Este proceso de cálculo
es aplicado en el sistema eléctrico trifásico a cada una de las tres señales de 60Hz de
voltaje y de corriente.
El problema consiste en implementar con el mínimo de código las ecuaciones (2.2),
(2.3), (2.4) y (2.5) en un DSP-Microcontrolador de punto fijo, con el cual solamente se
pueden efectuar instrucciones aritméticas de suma, resta, multiplicación y división en el
mejor de los casos. En el apartado 2.1.2 (Pruebas del algoritmo) se muestran los
resultados.
A continuación se presenta el desarrollo del programa, mostrando los cálculos como
bloques y posteriormente se describe el algoritmo computacional que calcula el
algoritmo matemático.
Algoritmo computacional. [38]
Se presenta un algoritmo computacional [38, 39] que mediante el uso de look up table
(LUT) y preprocesos se logra una reducción de cálculos, y por lo tanto, una reducción
en el tiempo de proceso. Con la misma técnica se presenta también un algoritmo para la
obtención de la función trigonométrica inversa en el cálculo del ángulo de desfase.
Existen una gran diversidad de algoritmos computacionales que pueden realizar un
mismo algoritmo matemático, sin embargo, para las aplicaciones del sincrofasor [37], la
optimización consiste en mejorar en orden de importancia:
El tiempo de procesamiento y
La minimización del código
N
nnX
NjZi
n
n
2sin][
2 1
0
1
0
2cos
2 N
n N
nnX
NZr

Capítulo 2 - 3
La rapidez del procesamiento no necesariamente depende de la minimización del código
sino de la velocidad de calculo (MIPS) del procesador, sin embargo, un código
minimizado siempre será el más rápido en cualquier procesador.
La alta escala de integración con la que actualmente cuentan los sistemas embebidos
tales como los DSP- Microcontroladores permite discriminar el problema de
requerimiento de memoria.
En este trabajo se presen dos técnicas de programación que permiten flexibilidad en
cuanto a la aplicación del sincrofasor, el “Pos proceso” y el “Preproceso”.
Pos proceso. El pos proceso son programas que en lugar de ser ejecutados en el
medidor sincrofasor, son ejecutados en el procesador central. Si el medidor se conecta a
un procesador central, para concentrar, almacenar y analizar, se puede utilizar también
para procesar información que no se requiere de manera local. Los pos procesos pueden
ser:
Obtención del valor de los fasor; calculados a partir de las componentes real e
imaginaria transmitidas por el sincrofasor y
Obtención del valor de potencias.
Preproceso Si en un equipo de medición digital de propósito específico se conocen la
resolución y los rangos, entonces se pueden desarrollar algoritmos computacionales a la
medida tal que, se pueda lograr el menor código de programa. El preproceso evita
cálculos repetitivos entre constantes, simplifica la programación, y para los casos en que
se requiera rapidez, también reduce el tiempo de ejecución del algoritmo matemático.
El preproceso que aquí se presenta consiste en prepara en una tabla LUT con las
funciones trigonometrías en formato de números enteros. Esta tabla contiene el
resultado de las operaciones aritméticas entre los valores de las funciones y las
constantes que son requeridas en el cálculo del fasor.
LUT para el cálculo de la amplitud.
Si se desarrolla la ecuación (2.4) sin tomar en cuenta el operador “j”se tiene que
16
152sin...0sin
16
2150
XXZi (2.6)
89.5sin8
1...0sin
8
1150 XZXZi (2.7)
La idea es generar la tabla del seno considerando la operación con la constate 1/8 y
posteriormente multiplicar todos los productos 1/8 sin() por un número n2 tal que, cada
uno de los productos queden como un numero entero y proporcionen la resolución
deseada. La idea de multiplicar por n2 es para que una vez que se regrese al valor
original con una división entre n2 , se pueda realizar con simples rotaciones a la
izquierda, si es que el Microcontrolador no tiene la instrucción de división.

Capítulo 2 - 4
Ejemplo para generar la tabla sin(), cos() y el cálculo de la amplitud.
El menor número entero “1/8*sin()* n2 ” se obtiene con n = 7, por lo tanto, la tabla se
puede realizar con n 7 en las tablas 2.1 y 2.2se presenta un ejemplo con n = 7 (27 =
128)
Tabla 2.1 Tabla de senos y cosenos
CteS Tabla sin CteC Tabla cos
n 2pn/16 1/8*sin() CteS* 128 1/8*cos() CteC*128
0 0.000000 0.000000 0 0.125000 16
1 0.392699 0.047835 6 0.115485 15
2 0.785398 0.088388 11 0.088388 11
3 1.178097 0.115485 15 0.047835 6
4 1.570796 0.125000 16 0.000000 0
5 1.963495 0.115485 15 -0.047835 -6
6 2.356194 0.088388 11 -0.088388 -11
7 2.748894 0.047835 6 -0.115485 -15
8 3.141593 0.000000 0 -0.125000 -16
9 3.534292 -0.047835 -6 -0.115485 -15
10 3.926991 -0.088388 -11 -0.088388 -11
11 4.319690 -0.115485 -15 -0.047835 -6
12 4.712389 -0.125000 -16 0.000000 0
13 5.105088 -0.115485 -15 0.047835 6
14 5.497787 -0.088388 -11 0.088388 11
15 5.890486 -0.047835 -6 0.115485 15
Tabla 2.2 Cálculo de la amplitud
Señal X[n] X[n]*Tabla sin Zi/128 X[n]*Tabla cos Zr/128 Amplitud
117 0 83 1872 111 139
130 796 1922
127 1437 1437
123 1818 753
96 1536 0
51 754 -312
-6 -68 68
-64 -392 946
-108 0 1728
-136 833 2010
-140 1584 1584
-117 1730 716
-76 1216 0
-25 370 -153
36 -407 407
85 -520 1256

Capítulo 2 - 5
LUT para el cálculo del ángulo.
Una vez que se tiene la amplitud A y las componentes real rZ e imaginaria iZ , el
ángulo de desfase se puede obtener aplicando una de las tres funciones siguientes:
arctan, arcsin o arccos, si se analizan los argumentos de las tres funciones, iZ / rZ , iZ / A
y rZ / A respectivamente variando el ángulo de 0 a 90° se tiene que:
0 iZ / rZ (2.8)
0 iZ / A 1 (2.9)
1 rZ / A 0 (2.10)
El argumento de la función arctan (2.8) tiene discontinuidades difíciles de manejar en el
DSP de punto fijo, mientras que en las funciones arcsin (2.9) y arccos (2.10) varían de 0
a 1 siendo la función arcsen más apropiada para generar un LUT ya que esta varía en
forma ascendente de la misma forma que el ángulo.
Procedimiento para generar la tabla arcsin
Partiendo de que en las operaciones de división en lenguaje ensamblador se generan dos
resultados, el cociente y el residuo, se procede a realizar una tabla en donde con
cualquiera de los dos resultados se pueda obtener el ángulo. Como se puede observa,
todos los cocientes enteros de la relación iZ / A son 0 excepto uno, cuando iZ = A , por
lo tanto, la idea es generar un conjunto de cocientes en fracciones de 0 a 1 cuyos
residuos sean enteros y que por lo tanto, se puedan utilizar como apuntadores de la
tabla. Se propone el siguiente procedimiento:
Se determina el tamaño de la tabla, es decir el número de pasos que se requieren,
el número de pasos depende de la resolución en grados que se desee. Por
ejemplo, si el registro apuntador es de 8 bits la tabla será de 256 pasos del 0 al
255, esto no quiere decir que la resolución sea 1/255° puesto que la relación
iZ / A varía senoidalmente
Se generan entre 0 y 1 una lista de 256 cocientes cuyos residuos sean los enteros
del 0 al 255. Esta lista tiene la siguiente forma 0, 1/255, 2/255, …, 255/255.
En la tabla 2.3 se muestra como ejemplo una porción de la tabla de 256 pasos. De los
algoritmos aritméticos de la división se puede comprobar que para este caso el residuo
es igual al numerador
numerador = denominador * CocienteEntero + residuo (2.11)
pero como los cocientes enteros son cero.
numerador = residuo (2.12)

Capítulo 2 - 6
Tabla 2.3 Tabla del arcsin
residuo
cociente = ArcSin(n/255)
Radianes
Grados
0 0 0 0
1 0.00392157 0.00392158 0
2 0.00784314 0.00784322 0
3 0.01176471 0.01176498 1
255 0.99999999 1.5707962 90
2.1.2 Pruebas del algoritmo
En este apartado se presentan las pruebas y resultados obtenidos para la medición de la
exactitud en la amplitud y la fase, también se presenta un análisis del tiempo de proceso
para la obtención del ángulo mediante una comparación con el valor obtenido a través
de la serie de Mac Laurin [38, 39].
En este trabajo se ha dado especial énfasis al algoritmo computacional y al uso del DSP-
Microcontrolador, por tal motivo, las pruebas aquí presentadas fueron realizadas sin el
uso del los sensores y acondicionadores de señal. Se utilizó un generador de funciones
para suministrar las señales eléctricas directamente al ADC y un osciloscopio para
corroborar las mediciones. En la figura 2.1 se muestra el diagrama a bloques de la
prueba y en la figura 2.2 las señales observadas en el osciloscopio.
Figura 2.1 Diagrama a bloques del sistema de pruebas del algoritmo
Generador de Funciones
Osciloscopio
Hyper-
terminal
DSP
GPS
TTL a RS-232
ADC
IXNT1
1PPS

Capítulo 2 - 7
Figura 2.2 Señales observadas en el osciloscopio, 1PPS y señal de referencia
Resultados de las pruebas de amplitud.
Las pruebas se hicieron con un voltaje de 220 volts rms. Considerando el 20% por sobre
voltajes, se requiere que el medidor tenga un rango de hasta 264 volts rms o 374 volts
pico, de tal manera que el rango requerido par el instrumento es de 748 volts pico-pico.
El ADC de 10 bits permite tener un rango de 1023 volts pico-pico con una resolución
de 1 volt (que es la resolución requerida), por lo tanto, el rango del instrumento queda
de 0 a 511 volts pico. En la figura 2.3 se muestra la gráfica de la diferencia entre el
voltaje de entrada y el voltaje medido.
0
0.5
1
1.5
2
2.5
0 100 200 300 400 500 600
Voltage in volts
Dif
fere
nce
in
vo
lts
Figura 2.3 Diferencia en la medición de magnitud.
El error máximo en el rango fue de 2 volts, 0.39% del rango total, lo cual es aceptable
para la aplicación. Considerando los errores por cuantización del ADC que es de 1/2
LSB y los de redondeo, los resultados son los esperados.

Capítulo 2 - 8
Resultados de las pruebas del ángulo de desfase.
Con una frecuencia exacta de 60.00000Hz el 1PPS se mantiene siempre en la misma
posición con respecto a la señal a medir. Para mover la posición relativa de ambas
señales (figura 2.2), se procedió a variar ligeramente la frecuencia de la señal
cosenoidal, (hacia arriba o hacia abajo, por ejemplo 60.00001Hz), una ves que se
encuentran en la posición deseada se regresa a la frecuencia de 60.00000Hz para hacer
la medición.
En la figura 2.4 se muestra la gráfica de la diferencia entre el ángulo medido en el
osciloscopio y el ángulo medido por el instrumento. Las pruebas se hicieron con dos
tablas, una de 255 pasos y otra de 1023 pasos.
0
0.5
1
1.5
2
2.5
3
3.5
60 70 80 90
Degrees
Dif
fere
nce
in
deg
rees
255 Steps
1023 Steps
Figura 2.4 Diferencia en la medición del ángulo.
El error máximo en el rango fue de 2 grados, 2.2% del rango total, lo cual es aceptable
para la aplicación. El error en ángulos cercanos a los 90 grados se reduce aumentando
el tamaño de la tabla
Análisis temporal del algoritmo
Una alta velocidad de procesamiento mejoran las características funcionales del
instrumento para las aplicaciones en protecciones y control.
Como se mencionó anteriormente, el tiempo de procesamiento de cualquier algoritmo,
depende en primera instancia de los MIPS del procesador, sin embargo, el algoritmo
que utiliza el menor número de instrucciones siempre será el más rápido. El cálculo del
ángulo es realizado comúnmente mediante la serie del arctan de Mac Laurin - Taylor:
1...53
tan53
1 zzzz 1z (2.13)
en donde z = Zi/Zr
Para lograr una precisión de 2 grados, la serie se extiende hasta el término z5/5 lo cual
implica al menos 10 operaciones y en el mejor de los casos el mismo número de ciclos.
Utilizando la función arcsen y la LUT aquí propuesta las operaciones se reducen a:

Capítulo 2 - 9
1. Zi/A => CocienteEntero (cero) y un residuo.
2. residuo => apuntador de memoria de datos => un ciclo.
3. instrucción TBLR (table read) => tres ciclos.
Por lo tanto, el algoritmo con LUT se realiza en cuatro ciclos de máquina del DSP.
2.2 Algoritmo para relevador de sobrecorriente
instantáneo basado en la variación del ángulo del fasor de
corriente.
El principal problema en la detección rápida de las falla (en menos de un cuarto del
periodo), es que dependiendo del momento en que se presenta la falla la evidencia de tal
es diferente, por ejemplo, si la falla se presenta cuando la señal normal se encuentra en
descenso después del pico del semiciclo positivo, al muestrear la señal las medidas son
muy semejantes a las de la señal normal [40], [41], [20].
En condiciones normales de operación las señales de corriente y voltaje son muy
semejantes a una señal senoidal pura, no obstante, cuando se presenta una falla o
disturbio muchas componentes transitorias son generadas y las frecuencias de las
señales son distorsionadas [42]. Se han hecho estudios de la diferencia angular entre las
tres fases cuando se presenta una falla [43]. Se han hecho estudios de la diferencia
angular en diferentes nodos de una red cuando se presenta una falla [44]. En este trabajo
se propone la detección de la falla mediante la diferencia angular muestra a muestra
entre los ángulos de desfase de la señal de falla y la misma señal un periodo antes de la
falla.
Para medir muestra a muestra el desfase de una señal, se utiliza el algoritmo recursivo
de la DFT. (RDFT) Éste se utiliza por ser el más ampliamente probado [42],[45]. Las
componentes reales e imaginarias se calculan con las siguientes ecuaciones:
N
kXX
NXX Nkkrkrk
2cos
21
(2.14)
N
kXX
NXX Nkkikik
2sin
21
(2.15)

Capítulo 2 - 10
Situación Actual
En un sistema eléctrico de potencia, la frecuencia del voltaje en cada lugar es
ligeramente diferente y siempre cambia, por lo tanto, se presenta un error en el cálculo
del fasor entonado a 60Hz, esto se debe a que los datos muestreados en la ventana de
tiempo de anchura fija no corresponden a un ciclo entero de la señal y por lo tanto, no se
satisface la condición de periodicidad de señal de la transformada de Fourier [46].
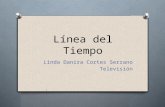
En la figura 2.5 se puede observar que para una variación de frecuencia de 59Hz
(desviación = -1) a 61Hz (desviación = 1) se presenta un error de fase menor de ± 10
grados [46], por lo tanto, una diferencia de fase periodo a periodo en condiciones
normales de operación en una red eléctrica deberá ser menor de 10 grados, ya que por
norma la máxima variación en frecuencia en una red eléctrica es de ± 0.5Hz (0.8% de la
frecuencia nominal)
En la figura 2.6 se muestran el error de fase periodo a periodo de una señal de 5
periodos que varia en incrementos y decrementos de frecuencia de 0.1 Hz. desde 59.8Hz
hasta 60.2Hz (en la figura se muestra únicamente el resultado). Como se puede observar
el máximo error de fase es de 3.5 grados. Por lo tanto, existen en todo momento
pequeñas variaciones del ángulo de fase, sin embargo, cuando se presenta una falla, las
variaciones son más evidentes. Como se demuestra más adelante.
Figura 2.5 Error de fase y amplitud que se produce cuando la frecuencia
de la señal es diferente de 60 Hz (desviación = 0), Obtenida de [46].

Capítulo 2 - 11
Algoritmo [69]
En una línea de transmisión durante el día y en condiciones normales de operación los
parámetros de las señales cambian muy lentamente (sin eventos de falla), de tal manera
que, en todo momento, un periodo de la señal normal es semejante al periodo que le
antecede. Por lo tanto, si comparamos el desfase de la señal con falla con el desfase que
debería de tener (el de un periodo anterior), es posible detectar la falla desde la primera
muestra inmediatamente después de que ocurre.
La diferencia de ángulos de desfase periodo a periodo esta dado por.
Δθ = θk – θk-N (2.16)
Si se calcula muestra a muestra los ángulos y se comparan las diferencias Δθ los valores
serán normales hasta que se presenta una falla, ver figura 2.7. (más adelante se muestran
los criterios que determinan una diferencia de ángulos normales).
En el siguiente apartado (simulación) se grafican los cálculos de las diferencias
angulares en una falla a tierra típica [40], [41], [20]. Se presentan los cálculos para fallas
presentes en diferentes instantes (ángulos) de la señal normal. Las líneas punteadas
acotan las señales en un cuarto del periodo después de la falla. Además de que se
presenta la diferencia angular periodo a periodo, se presentan otras relaciones como la
diferencia de las diferencias periodo a periodo, la diferencia angular muestra a muestra
y la diferencia de las diferencias muestra a muestra. Como se puede apreciar en las
gráficas, la diferencia angular periodo a periodo es la que más variación tiene cuando se
-3
-2
-1
0
1
2
3
0 0.02 0.04 0.06 0.08time [seg]
Ph
ase
erro
r [°
]
Figura 2.6 Error de fase en una señal que varía de 59.8 a 60.2 Hz.
11 2
2 33
θ1’ – θ1 => Normal
θ2’ – θ2 => Normal
θ3’ – θ3 => Anormal
Figura 2.7 Diferencia de los ángulos periodo a periodo

Capítulo 2 - 12
presenta una falla. En la tabla 2.4 se presenta un concentrado con diferentes variaciones
de porcentaje de amplitud en los diferentes instantes de falla.
En la figura 2.8, se presenta la interpretación gráfica de la tabla 2.4
Como se puede apreciar, las variaciones de ángulo se hacen mínimas en los ángulos de
45, 135, 225 y 315 grados, que es cuando la señal se encuentra a la mitad del recorrido
de ascenso y descenso en ambos semiciclos, sin embargo, estas variaciones son
significativamente mayores a las variaciones normales que se presentan en una señal sin
falla y operando con mínimas variaciones de frecuencia (59.5 a 60.5 Hz) [47]. Figura
Tabla 2.4 Diferencia angular
Fai
lure
’s I
nst
ant
[º]
0 1.1 1.8 3.2 4.6 5.9 11.2 15.1 18.0 20.4 21.3
22.5 1.6 1.6 3.1 4.3 5.3 9.5 12.3 14.2 15.7 16.2
45 2.1 2.5 2.8 3.4 3.8 5.6 7.1 8.3 9.4 9.8
67.5 2.1 2.5 2.8 3.4 3.8 5.6 7.1 8.3 17.2 17.9
90 3.4 4.9 6.4 7.7 9.0 14.1 17.8 20.6 22.9 24.0
112.5 0.8 2.3 3.7 5.0 6.2 11.2 14.9 17.7 19.8 20.7
135 0.5 0.8 1.2 1.7 2.5 5.1 7.4 9.2 10.9 11.8
157.5 1.3 2.2 3.3 4.4 5.4 10.2 14.3 17.8 20.8 21.9
180 1.5 3.0 4.5 5.9 7.2 12.4 16.3 19.3 21.6 22.3
202.5 1.5 2.7 4.0 5.2 6.3 10.5 13.3 15.2 16.7 17.3
225 2.0 2.4 2.8 3.2 3.6 5.4 6.8 8.0 9.0 9.4
247.5 2.7 3.7 4.7 5.7 6.6 10.2 13.0 15.6 16.9 17.5
270 3.2 4.7 6.1 7.4 8.6 13.6 17.2 20.0 22.2 23.3
292.5 3.2 4.8 6.3 7.6 8.9 14.0 17.7 20.5 23.0 24.2
315 2.3 3.1 3.8 4.5 5.2 8.2 10.7 12.8 14.6 15.7
337.5 1.1 0.8 2.0 3.1 4.1 8.9 13.0 16.5 19.5 20.7
1.2 1.4 1.6 1.8 2.0 3.00 4.00 5.00 6.00 6.45
% of amplitude variation
% of amplitude variation
0
10
20
30
0 45 90 135 180 225 270 315
Failure’s Instant [ º ]
Angular Difference
[ º ]
1.2 1.4 1.6 1.8 2 3 4 5 6 6.45
h
Figura 2.8. Diferencia de los ángulos periodo a periodo con diferentes amplitudes y en
diferentes instantes

Capítulo 2 - 13
2.9
Simulación
En esta simulación se presentan las distintas diferencias angulares con las cuales se
experimentó. Las líneas verticales punteadas limitan un cuarto del periodo de la señal
después de una falla. En las figuras 2.10, 2.11 y 2.12 se presentas las gráficas de dicha
simulación. Como se puede observar, es posible detectar una falla eléctrica midiendo la
diferencia de los ángulos de fase entre la señal de falla y la señal normal (la misma señal
de corriente un periodo antes). En la medida que se tengan más muestras por periodo y
algoritmos de cómputo que calculen en línea el fasor entre muestra y muestra, se tendrá
la posibilidad de poder detectar las fallas desde sus facetas tempranas
0
5
10
15
20
25
30
0 50 100 150 200 250 300 350
Failure instant [°]
Angula
r D
iffe
rence
[°]
6.45% of amplitude variation Maximum normal variationl
Normal phase angle
variation zone
Failure zone
Tolerance zone
Figura 2.9 Zonas de variación angular para una falla de 6.45% de amplitud (falla
proporcionada por CFE).
-30
-10
10
Time [seg]
[°] Angular Difference
Difference of the differences sample to sample
Difference sample to sample
Difference period to period
Difference of the differences period to period
Figura 2.10 Distintas diferencias angulares. La diferencia angular periodo a periodo
es la que más variación tiene cuando se presenta una falla.

Capítulo 2 - 14
Figura 2.11 Variación angular en fallas presentes entre 90 y 270 grados
Amplitude
-8
0
8
90º
time
∆θ
-30
-5
20
¼ T90º
time
Amplitude
-8
0
845º
∆θ
-30
-5
20
45º
∆θ
-8
0
8
315º
time
∆θ
-30
-5
20
315º
time
∆θ
-8
0
8270º
time
∆θ
-30
-5
20
270º
time

Capítulo 2 - 15
Figura 2.12 Variación angular en fallas presentes entre 225 y 135 grados
∆θ
-8
0
8
180º
time
∆θ
-30
-5
20
180º
time
∆θ
-8
0
8225º
time
∆θ
-30
-5
20
225º
Amplitude
-8
0
8135º
time
∆θ
-30
-5
20
135º
time

Capítulo 3 - 1
Capítulo 3
Implementación del instrumento
3.1. Estado actual Como ya se mencionó en el apartado estado del arte, en cuanto a la construcción de un
sincrofasor, el mayor detalle se presenta en la referencia [13] en la cual se describe
mediante un diagrama a bloques la construcción del sincrofasor Macrodyne modelo
1690, en donde se aprecia que el equipo fue desarrollado con un microprocesador
68030. Sin embargo no hay ninguna referencia en la que se indique con detalle el
algoritmo computacional que desarrolla la DFT [26, 27, 28, 29]. No se menciona como
se establece el algoritmo de sincronización entre el GPS y el sistema adquisición de
datos – Microprocesador, tampoco hay descripción (ni aún a nivel de diagramas de
flujo) del desarrollo del software de los algoritmos de cálculos matemáticos, de los
algoritmos de sincronización entre los diversos periféricos y tampoco hay descripción
de los algoritmos de comunicación entre el microprocesador, el GPS y la PC. En cuanto
al hardware, como ya se mencionó, la descripción se reduce a diagramas a bloques. En
resumen, no hay un Know How [30] para el desarrollo y la constricción de un
sincrofasor.
3.1.1. Medición fasorial sincronizada mediante GPS.
El GPS consta en promedio de una constelación de 24 satélites activos. Los satélites se
encuentran girando en órbitas a 18000 kms de la superficie. Mediante órbitas cruzadas
que se repiten dos veces al día se cubre toda la superficie de la Tierra de tal forma que,
en todo momento del día, siempre y cuando se consideren las restricciones de
propagación de las microondas, hay “línea de vista” de varios satélites en cualquier
lugar de la Tierra.
El sistema proporciona a usuarios terrestres que cuentan con un receptor GPS varios
servicios entre los que se encuentran la medición de las coordenadas geográficas, la
altura al nivel del mar, la velocidad, la dirección del desplazamiento, la deriva
magnética en grados, la hora mediante el UTC (universal coordinated time) y la señal de
un pulso por segundo (1PPS) entre otros [5,48]
3.1.2. Señal de sincronía 1PPS
La señal de 1PPS es una señal TTL generada por el sistema GPS receptor (terrestre).
Por omisión, cada vez que se energiza el receptor, se genera el 1PPS aunque no se haya
detectado satélite alguno, una vez que se detecta por lo menos un satélite, el receptor
sincroniza el flanco de subida del 1PPS con la recepción del UTC. La señal de 1PPS
tiene un ancho de pulso de 10 microsegundos, un tiempo de ascenso típico menor de 20
nanosegundos y un periodo de un segundo con una exactitud de más menos 100
nanosegundos. A su vez el UTC está sincronizado con un reloj atómico de Cesium de
alta estabilidad que contiene cada satélite, el reloj de cada uno de los satélites están

Capítulo 3 - 2
sincronizados entre si con un reloj maestro, de tal manera que, todos los satélites envían
el UTC virtualmente al mismo tiempo, el 1PPS llega a cualquier lugar de la tierra con
una exactitud de 1 microsegundo, que traducido a ángulo de desfase es de 0.021 grados.
Para cualquier aplicación en donde se utilice el GPS para sincronizar, se deberá usar el
flanco de subida del 1PPS ya que este se sincroniza a partir de la recepción del UTC. En
la figura 3.1 se muestra el diagrama a bloques del sistema de medición, el GPS terrestre
recibe la señal de uno o más satélites, (para poder calcular las coordenadas terrestres por
ejemplo, se requiere que el receptor capte por lo menos tres satélites), una vez que el
receptor detecta una señal de buena calidad de por lo menos un satélite, decodifica el
UTC y lo trasmite en sincronía con la señal de 1PPS a cada uno de los medidores
fasoriales (PMU) [1,9]. Cada PMU utiliza la señal de 1PPS para sincronizar sus
respectivos temporizadores de muestreo, calcula el fasor y lo trasmite junto con el UTC
a un procesador central que es el que se encarga de calcular los desfases de cada nodo
de medición.
Figura 3.1 Sistema de medición
3.1.3. Medición de líneas de transmisión eléctrica [49, 20]
Dado un sistema eléctrico, en donde se asigna un nodo de referencia y un parámetro con
un desfase cero (figura 3.2) y se conocen para todos y cada uno de los demás nodos los
valores eficaces (rms) de los fasores de voltajes y corrientes, los valores de potencias
generadas o consumidas se calculan aplicando las ecuaciones correspondientes:
*VIS , cosVIP , sinVIQ , 22 QPS ,y cos.. PF , θ = δ – β, en
donde δ = Ángulo de fase del voltaje, β = Ángulo de fase de la corriente
GPS1 GPS2 GPSn
PMU 1
(A1, θ1)
PMU 2
(A2, θ2)
PMU n
(An , θn)
Cálculo de los
ángulos de desfase
Procesador Central

Capítulo 3 - 3
Figura 3.2 Sistema eléctrico con la asignación del nodo 1 como de referencia.
Con los valores de los fasores y aplicando las convenciones que se muestran en la figura
3.3 los problemas de flujos de potencia y pérdidas en líneas de transmisión se reducen al
análisis de un circuito eléctrico [50].
Figura 3.3 Convención de signos en el flujo de potencia
Para medir la impedancia total en serie en una línea de transmisión corta, figura 3.4 se
aplica la ecuación [50]
I
VVZ 21 (3.1)
En donde 1V , 2V e I son los fasores cuyos ángulos de desfase son δ1, δ2 y δI
respectivamente.
V11
II
V22
Figura 3.4 Línea de transmisión corta
+ Potencia absorbida
- Potencia suministrada
V2V2
I2I2
1 3
2
1
V10
I1I1
V3V3
I3I3

Capítulo 3 - 4
Para la línea corta de transmisión se tiene que la potencia real que fluye del nodo 1 al
nodo 2 a través de la línea de transmisión con impedancia Z, en donde R = 0 es:
1221
12 sinX
VVP (3.2)
Las pérdidas de potencia en una línea de transmisión se pueden obtener con la suma
algebraica de las potencias
21 SSSP
Para medir la impedancia y la admitancia en la línea de transmisión representada por un
circuito en PI (figura 3.5) se tiene que:
YVI
VVZ
22
21
2
)(2
(3.3)
y
)(
)(2
12
21
VV
IIY
(3.4)
Figura 3.5 Circuito equivalente de una línea de transmisión
3.2 Cálculo del fasor
En el capítulo 2 se demostró como mediante el proceso de la DFT se obtiene el fasor de
las componentes de 60Hz de las señales eléctricas. En el algoritmo, primero se calculan
las componentes real e imaginaria del fasor y a partir de estos resultados se calcula la
amplitud y el ángulo de fase de la señal con respecto a la primera de las dieciséis
adquisiciones de la ventana de cálculo. En el apartado “Medición fasorial sincronizada
mediante GPS” se describe la necesidad de contar con un procesador remoto, de estas
situaciones se desprenden dos ideas para el cálculo del fasor.
1. Que en el sincrofasor de manera local, se calculen las componentes real (Zr)
e imaginaria (Zi) y que también en el mismo sincrofasor se calculen la
2I 1I Z
2
Y
2
Y 1V
2V

Capítulo 3 - 5
amplitud y la fase. Con este método se podría calcular y visualizar en el
punto de medición otras mediciones locales tales como potencias.
2. Que el sincrofasor calcule las componentes real e imaginaria, que el
sincrofasor transmita las componentes al procesador central y que el
procesador central calcule mediante un “Posproceso” las amplitudes, las
fases y otros parámetros de los nodos. Con este método se liberaría al
procesador del sincrofasor del cálculo de la amplitud y la fase que para
ciertas aplicaciones no tendrían ningún sentido de manera local.
3.
Posproceso. Si el sistema se conecta a un procesador, para concentrar, almacenar y
analizar, entonces se puede utilizar también para procesar. Se le da la connotación de
posproceso porque el resultado final no se procesa o calcula en tiempo real, sino en un
tiempo posterior dentro del procesador. Con lo anterior se tiene la ventaja de que se
libera al sincrofasor de procesar información que no se requiere de manera local.
Dependiendo de las necesidades en conocer cierta información de manera local, el
posproceso se puede aplicar en diversos niveles, la más básica sería asignar al
sincrofasor únicamente la tarea de calcular las componentes real e imaginaria, es decir,
en donde la medición local no aporte suficiente información y se requiere de por lo
menos la información de otro sincrofasor, por ejemplo, en la medición en tiempo real de
nodos remotos de una líneas eléctrica. Un nivel intermedio sería que el sincrofasor
calcule el fasor y que el procesador central dependiendo de la aplicación genere los
cálculos necesarios, tales como potencias. Un nivel mínimo de posproceso sería que el
sincrofasor calculase incluso las potencias y el procesador central calcule únicamente
los desfases. En la figura 3.6 se muestra mediante un esquema los dos niveles extremos
Figura 3.6 Niveles de posprocesamiento
3.3 Medición de los ángulos de desfase
Para calcular el desfase en un nodo determinado, es necesario que uno de los ángulos de
una de las señales, se seleccione como señal de referencia, con esta referencia el desfase
Sincrofasor
Calcula Zi, Zr, A y
otros parámetros
Procesador central remoto
Calcula los desfases.
Sincrofasor
Calcula Zi y Zr
Procesador central remoto
Calcula A , otros parámetros
y los desfases.
Transmite Zi y Zr
a) Nivel bajo
b) Nivel alto
Transmite A y
otros parámetros

Capítulo 3 - 6
de las señales de los demás nodos se calculan con una resta, como se puede observar en
la figuras 3.7 y 3.8
El procedimiento del cálculo del desfase de las señales de la figura 3.7 se ejemplifica en
los siguientes pasos:
La referencia 1PPS se recibe al mismo tiempo en cada uno de los medidores.
Se calcula el ángulo de desfase de la señal medida en el nodo con respecto a la
referencia 1PPS, dando como resultado los ángulos 1 y 2; 1 y 2
respectivamente.
Cada medidor transmite por algún medio de comunicación a un procesador
central los ángulos calculados junto con el tiempo específico en el que se hizo la
medición.
El procesador central calcula el desfase. Si se toma como referencia el medidor 1
(1). El desfase de la señal del medidor 2 con respecto a la señal del medidor 1
está dado por 2 = 1-2.
Para el resto de los nodos se sigue el mismo procedimiento, de manera genérica
se tendría que para el nodo n n = 1-n.
Con el fasor de cada uno de los nodos, se calculan otros parámetros tales como
Potencias, Impedancias y Admitancias.
Figura 3.7 Cálculo del ángulo de desfase

Capítulo 3 - 7
Figura 3.8 Sincronización de la medición
En la figura 3.9 se muestra el diagrama de flujo más general del proceso
Figura 3.9 Proceso general del medidor
3.4 Requerimientos para la implementación de un
sicrofasor.
En el apartado 3.1.1 Medición fasorial sincronizada mediante GPS, se hizo una
descripción general del sistema de medición, en la figura 3.1 Sistema de medición, se
muestra el diagrama a bloques más general del sistema. Se empezará por definir los
requerimientos para el subsistema GPS. Éste deberá contar con una salida que
proporcione la señal 1PPS, deberá contener también un canal de comunicaciones
mediante el cual se pueda consultar el UTC. Las señales eléctricas a medir pueden
variar en amplitud y ser del orden de los cientos de volts y de amperes, por lo tanto, el
sistema deberá contar con sensores y acondicionadores de señal que transformen la
amplitud de las señales a medir en señales que puedan ser introducidas a un Convertidor
Análogo Digital (ADC). Una vez que se han digitalizado las señales, un procesador
digital se encarga de calcular el fasor. La señal de sincronía 1PPS del GPS, indica al
procesador el inicio de la primera de las N muestras de la ventana de cálculo de la DFT,
para este diseño se seleccionaron 16 muestras [51, 52], por lo tanto, el periodo de
muestreo para las adquisiciones subsecuentes tendría que ser de 0.00104166 segundos
para la señal de 60 Hz. El UTC también deberá ser recibido por el procesador digital
Cálculo del fasor en cada uno de los nodos y
en cada una de las tres señales de corriente y voltaje
Cálculo del desfase entre señales
Cálculo de otros parámetros
Potencias, Impedancias y Admitancias

Capítulo 3 - 8
para que junto con el fasor sean transmitidos al procesador central. De tal forma que
también es requerido un sistema de comunicaciones tanto locales como remotas.
En un sistema con procesadores digitales, la comunicación entre el CPU, la memoria y
los dispositivos de E/S es del tipo maestro esclavo, en donde el CPU es el maestro, por
tal motivo, la señal de 1PPS debe ser detectada en primera instancias por el CPU y no
por el ADC como erróneamente se han presentado en algunos diagramas a bloques de
los artículos citados en la referencia con los números [3, 6, 8 y 20] En la figura 3.10 se
muestra el diagrama a bloque que ilustra los requerimientos anteriores.
Figura 3.10 Diagrama a bloques general del sincrofasor.
Subsistema acondicionador de señales. Está constituido por los sensores de voltaje,
sensores de corriente, acondicionadores de nivel y filtros. Las características de este
subsistema dependen de dos factores principalmente: El rango de medición de voltajes y
corrientes y el voltaje de conversión del ADC. En la figura 3.11 se muestra una primera
aproximación de este subsistema.
Sensores. Como sensores de voltaje y de corriente se han venido utilizando los
trasformadores de potencial (TP) y los trasformadores de corriente (TC)
respectivamente, con las principales características de que aíslan eléctricamente el
sistema a medir con el sistema de medición, presentan una alta impedancia de entra y
una baja impedancia de salida, existen actualmente una gran cantidad de fabricantes que
comercializan TP y TC par la detección en diferentes rangos de medición de voltaje y
corriente. Dentro de los criterios de selección de los sensores se deben tomar en cuenta
principalmente los siguientes factores:
Que no distorsionen la forma de onda de las señales.
A
D
C
Línea eléctrica de AC
Acondicionador de
señales
Procesador
digital
GPS
UTC
1PPS
Comunicaciones
Comunicación
remota

Capítulo 3 - 9
Que no exista desfase entre la señal medida y la entregada o que todos los
diferentes sensores tengan el mismo desfase.
Que el nivel de voltaje entregado por los sensores sean muy cercanos (por
arriba) al voltaje de entrada del ADC, que normalmente es de 0 a 5 ó de 0 a 3.3
volts.
Figura 3.11 Acondicionador de señales.
El acondicionador de nivel, ajusta la señal a los niveles de voltaje necesarios para que
queden dentro del rango de conversión del ADC, que como ya se menciona es de 0 a 5 ó
de 0 a 3.3 volts. El acondicionador de nivel está constituido por un atenuador (o
amplificador si es el caso) pasivo o activo, un filtro y un voltaje de referencia de CD. El
atenuador o amplificador permite el ajuste al nivel pico a pico de la señal. El filtro
permite el paso de la señal fundamental y las armónicas deseadas. El voltaje de
referencia de CD (voltaje de offset) se adiciona a la señal de AC entregada por el
atenuador para ajustar la señal, de cero volts al máximo voltaje del ADC. En la figura
3.12 se muestra un diagrama a bloques del acondicionador de nivel.
Figura 3.12 Acondicionador de nivel.
Atenuador. Cuando los sensores son de baja impedancia de salida, es más deseable
atenuar que amplificar la señal, ya que la atenuación se puede hacer con elementos
pasivos, mientras que para la amplificación siempre es necesario utilizar elementos
activos. En la figura 3.13 se presentan los dos métodos de solución. En el caso de
utilizar elementos activos, los elementos más probados y confiables son los
Sensor ADC
Acondicionamiento de
nivel y Filtrado
V
t
Acondicionamiento de
nivel y Filtrado
3.3 ó 5
t
V
3 TC´s
3 TP´s
offset Atenuador
o
Amplificador
y
filtrado

Capítulo 3 - 10
amplificadores operacionales, que presentan una alta impedancia de entrada y una baja
impedancia de salida. Para el caso de utilizar elementos pasivos lo más sencillo y
confiable es el divisor de voltaje. La baja impedancia de salida del TP hace del
atenuador por divisor de voltaje el circuito ideal.
Figura 3.13. Métodos para la atenuación: a) Con elementos activos,
b) Con elementos pasivos.
Filtro. Dentro de las aplicaciones alternas para la que se ha pensado este sistema se
encuentra la del análisis armónico y calidad de la energía, por tal motivo se ha decidido
incluir un filtro pasa bajas cuya frecuencia de corte se determina en las especificaciones
generales del sistema. Interconectando el divisor de voltaje con el filtro pasa bajas, se
tiene el diagrama de la figura 3.14
R1
C1
Vi R2
Vo
Figura 3.14 Circuito atenuador con filtro pasa bajas.
De donde
io VRR
RV
21
2
(3.5)
pcf
2
1 (3.6)
CReqp (3.7)
21
21
RR
RRReq
(3.8)
CRR
RRf c
21
212
1
(3.9)
R2 1k
R1
1k
Vi Vo R1
R2
Vi Vo iZ
0oZ
a) b)

Capítulo 3 - 11
SRCRRR
RsH
11221
2
(3.10)
Offset. Conocidos los requerimientos de entrada del ADC, se pueden determinar los
niveles de voltaje del offset, que de manera genérica está dado por:
2
ADCofs
VV (3.11)
en donde:
VADC Es el voltaje máximo de entrada del ADC
Existen dos métodos comúnmente utilizados para generar el voltaje de offset: utilizando
referencias de voltaje disponible en un circuito integrado y utilizando un divisor de
voltaje, la elección del método dependerá del voltaje, del ADC que se seleccione, en la
figura 3.15 se muestran los circuitos para el offset.
Figura 3.15 Circuito offset a) mediante un circuito integrado voltaje de referencia, b)
mediante un divisor de voltaje
Subsistema ADC. La principal característica a analizar para la selección del ADC es la
resolución en número de bits. La velocidad de conversión no representa ningún
problema, ya que los tiempos más lentos de conversión para los ADC actuales fluctúan
en alrededor de los 32 microsegundos, lo cual significa que se pueden hacer 520
adquisiciones en un periodo de una señal de 60 Hz. Como el sistema está planeado para
sistemas trifásicos, por lo tanto se requiere medir tres señales de voltaje y tres de
corriente, de tal modo que el ADC deberá contar con un mínimo de 6 canales. El ADC
entrega un número fijo de datos dependiendo del número de bits, es decir, que divide en
un número fijo de divisiones la señal de voltaje de entrada. Este número de datos o
divisiones (Ndiv) está dado por
Ndiv = 2n–1 (sin incluir el cero) (3.12)
Por otro lado, la cantidad de divisiones requerida en la medición (Ndiv), está
determinada por el rango de medición, la resolución de la medición y se relacionan de la
siguiente manera:
R
LIRLSRNdiv
(3.13)
en donde:
b)
V Voff
Voff
V a)

Capítulo 3 - 12
LSR es el límite superior del rango, LIR es el límite inferior del rango y R es la
resolución.
De tal manera que el número de bits n necesarios para poder representar Ndiv a partir
del rango y la resolución, se obtiene igualando (3.12) y (3.13)
R
LIRLSRn
12 (3.14)
Despejando a n
2
1
n
R
LIRLSRn
n
(3.15)
En la ecuación (3.8) el número de bits que se obtiene puede ser un número fraccionario,
pero, como el número de bits solo puede ser entero, entonces:
)2(
1
.n
R
LIRLSRn
MASREDONDEARn
(3.16)
Subsistema GPS. Dependiendo de la aplicación, existen comercialmente diferentes
sistemas de receptores GPS. Desde los sistemas cerrados, en los cuales el medio para
obtener la información es mediante una pantalla de cristal líquido (LCD) y un teclado,
hasta circuitos integrados para desarrollar el receptor a la medida. Lo importante es que
el receptor GPS tenga la salida de 1PPS con el nivel de voltaje de 5 o de 3.3 volts para
que pueda ser detectada por el procesador digital. Y que adicionalmente, disponga de
una salida serial que normalmente es del tipo Transmisor Receptor Asíncrono Universal
(UART) para la lectura de UTC. Existen diversos protocolos GPS de comunicación de
los cuales se puede obtener el UTC, cada una de sus características se pueden consultar
en la referencia [48]. El protocolo estándar industrial NMEA 0183 (National Marine
Electronics Association) (Trimble Navigation Limited, 2000) resulta ser el más
económico y sencillo de utilizar, requiere de una sola vía de comunicación (simplex) y
utiliza el código estándar ASCII. Otros protocolos además de ser de dos vías (full
duplex), requieren del desarrollo de software para la interpretación de los comandos en
código binario, por otro lado, el NMEA por su estatus de protocolo estándar, es
manejado por la mayoría de los receptores GPS.
Subsistema procesador digital. Todos los sistemas con procesadores digitales están
compuestos por una unidad central de procesos (CPU) y periféricos. Los periféricos en
un sistema digital son el oscilador, las memorias y los dispositivos de entrada y salida
(E/S). El mínimo de periféricos requeridos por un sistema digital son el oscilador y la
memoria de programa ver figura 3.16.

Capítulo 3 - 13
Figura 3.16 Sistema con procesador digital: a) Clasificación de periféricos, b) Diagrama
a bloques más general.
Al mínimo de componentes que constituyen al sistema digital, se le agregan los
periféricos requeridos para el cálculo del sincrofasor. Para poder determinar los
periféricos necesarios, se parte del siguiente análisis.
Requerimientos del sistema mínimo: El mínimo de periféricos necesarios que permiten
hacer funcionar a un procesador son el oscilador y la memoria de programa, el oscilador
proporciona los pulsos de reloj que necesita la unidad de temporización y control del
procesador para ejecutar en cada pulso una o más de las micro instrucciones que
componen una instrucción. La memoria de programa almacena los códigos de operación
de las instrucciones que componen el programa del sincrofasor. Actualmente existen el
mercado memorias de programa no volátiles desde 8Kbytes, la cual por comparación
con otras aplicaciones, es suficiente para albergar el programa del sincrofasor, ver figura
3.17
Figura 3.17 Sistema mínimo
Requerimientos de periféricos para el cálculo del algoritmo de la DFT: Además del
ADC que ya se mencionó, los cálculos derivados de la DFT generan la necesidad de
tener variables o localidades de memoria en donde se vayan almacenando los cálculos
matemáticos, este almacenamiento se hace en memoria RAM al igual que la memoria
de programa, existen en el mercado memorias RAM desde 8Kbytes, que como el
sistema no está pensado para funcionar como “Dataloger” es suficiente.
Requerimientos de sincronización: La entrada del 1PPS al procesador puede ser de dos
formas. La primera opción es conectar el 1PPS a una entrada de un puerto paralelo, para
detectar mediante poleo la presencia del 1PPS, es decir, que utilizando un lazo (loop) de
instrucciones se tendría que revisar constantemente la entrada para detectar la presencia
OSC CPU
Memoria de Programa
CPU Periféricos
b)
CPU Oscilador
(osc)
Memoria
E/S
a)

Capítulo 3 - 14
del pulso. La segunda opción es conectar el 1PPS a una interrupción del procesador a
través de un controlador de interrupciones, ver figura 3.18. La segunda opción permite
al CPU realizar otras tareas mientras llega el pulso, además, la mayoría de los
procesadores digitales, llámense microprocesador, microntrolador o DSP, cuentan con
terminales para interrupciones externas, por lo tanto, se recomienda que la señal del
1PPS sea detectada por hardware mediante una interrupción externa que pueda ser
activada con los flancos o transiciones de subida del pulso [48].
Figura 3.18 Detección del 1PPS: a) Por Poleo, b) Por Interrupción
Después de detectado el flanco de subida del 1PPS, se procede a la adquisición del
conjunto de las 16 muestras en la ventana de un periodo de la señal de 60Hz, para tal
efecto, se deben de generar los períodos de muestreo de 0.001041666 segundos
(frecuencia de muestreo de 960Hz). Para generar con exactitud dichos periodos, se debe
utilizar un temporizador que sincronice a su vez a la señal para el inicio de conversión y
de muestreo y retención (S/H) del ADC. El temporizador deberá tener una bandera de
sobre flujo o una salida por comparación que se utilice como señal de sincronía.
Requerimientos de comunicación: Como ya se mencionó en el subsistema GPS, el UTC
es transmitido mediante un sistema de comunicaciones del tipo UART. Para la
comunicación remota, ya sea mediante MODEM o Tarjeta de Internet a través de una
PC local se utilizan los sistemas de comunicación serial UART en estándar RS-232 o
mediante USB. Por lo tanto, el puerto serial tendría que ser del tipo UART y/o USB.
Como se mencionó en el apartado “Medición de los ángulos de desfase”, después de
que el sincrofasor recibe el 1PPS, el UTC y calcula el fasor, transmite la información al
procesador central, de lo anterior se deduce que el requerimiento mínimo del puerto
serial es de un receptor (del GPS al Puerto serial) y un transmisor (del Puerto serial al
procesador central). Sin embargo para ciertas aplicaciones sería probable que se
requiriese una comunicación del procesador central al puerto serial del sincrofasor. En
la figura 3.19 se muestran ambos requerimientos.
CPU
Controlador de
Interrupciones 1PPS INT
Puerto Paralelo
CPU
Bus
1PPS
b)
a)

Capítulo 3 - 15
Figura 3.19 Sistema de comunicación serial: a) Requerimiento óptimo, b)
Requerimiento mínimo
Otros requerimientos: Los periféricos descritos anterior mente son suficientes para el
desarrollo del sincrofasor. Si se requiriese algún ajuste o programación de parámetros al
sincrofasor, este lo podría hacer el procesador central mediante el canal de
comunicaciones bidireccional (inciso a) fig 3.19). Sin embargo si se desea que de
manera local se programen parámetros o se visualicen mediciones, es necesario que se
agreguen puertos paralelos mediante los cuales se conectarían las interfases con el
usuario, por ejemplo, teclados y pantallas, los cuales se pueden conectar en un puerto
paralelo de 16 bits. En la figura 3.20 se muestra el diagrama a bloques general del
subsistema Procesador Central con los subsistemas de comunicaciones y el ADC.
Figura 3.20 Sistema Procesador Digital
OSC CPU
Memoria de Programa
Memoria de Datos
Controlador de
Interrupciones
Puerto Serial
Puerto Paralelo
GPS
IPPS UTC
Local
Remota
ADC
S/H
Temporizador
Bus CPU
Puerto Serial
RX
GPS
UTC
Sistema de Comunicación
Remota TX RX
CPU
Puerto Serial
RX
GPS
UTC
Sistema de Comunicación
Remota TX
Bus
a)
b)

Capítulo 3 - 16
3.5 Especificaciones del sincrofasor a implementar
Partiendo de la aplicación propuesta para el sincrofasor y de los recursos disponibles
para el desarrollo y pruebas, se proponen las siguientes especificaciones generales. Para
la medición de los parámetros de las líneas de transmisión, es suficiente una resolución
de un grado en la medición de la fase y de un volt en la medición de la amplitud. Con
respecto al rango en la medición de la amplitud, se propone de 0 a 120 volts (más 20%
debido a sobretiros ocasionados en las fallas), considerando que este es el rango de
funcionamiento de la línea de transmisión a escala con la que se cuenta en el laboratorio
de pruebas, las especificaciones anteriores se describen en la tabla 3.1
Partiendo de los requerimientos de diseño y de las especificaciones generales del
sincrofasor, se generan las especificaciones de cada subsistema, las de algunos ya
vienen dadas desde los requerimientos de diseño, por ejemplo, las del subsistema GPS,
sin embargo, la mayoría se definen con las especificaciones generales. En la tabla 3.2 se
resumen las especificaciones del subsistema GPS.

Capítulo 3 - 17
Tabla 3.1 Especificaciones generales del sistema
Especificaciones Generales
Requerimientos de medición Características
Fases 3 fases
Frecuencia 60 Hz
Análisis armónico 9° armónica
Rango de medición en voltaje* 0 a 120 volts + 20%
Resolución en voltaje* 1 volt
Rango de medición en corriente* 0 a 5 amperes
Resolución en corriente * 0.1 amperes
Rango del ángulo de fase 0 a 359 grados
Resolución del ángulo de fase 1 grado
*Estos valores están determinados por los transformadores de corriente y voltaje (TC
TP) utilizados, por tal motivo, los rangos y la resolución se pueden determinar
cambiando dichos transformadores.
Tabla 3.2 Especificaciones del subsistema GPS
GPS
Requerimientos Capítulo 4 Características
IPPS Periodo T = 1s
Amplitud 5V ó 3.5V
UTC Disponible en puerto serial UART
Protocolo NMEA
Especificaciones de los sensores. Para el caso de los TP, considerando el 20%
adicional por voltajes de sobretiro en el rango de medición para líneas de 120 volts, se
tiene que el rango de medición contemplando el sobre tiro es de 144 volts, si se ajusta a
valores comerciales de TP, se tiene que el TP más apropiado es el de 240 a 12 volts, de
tal forma que, como acondicionador de nivel, se tendría que utilizar un atenuador. Para
el caso de los TC, los modelos comerciales tienen una relación de conversión de XX:5
en donde el valor XX corresponde a la máxima corriente de entrada y el 5 a la máxima

Capítulo 3 - 18
corriente de salida proporcional a los amperes de entrada. Como el rango total de
corriente a cubrir es de 0 a 5 amperes, entonces, se requiere de un TC con una relación
de corriente de 5:5. De tal forma que con una resistencia de 1 ohm se tiene un voltaje de
salida de 5 volts, que es uno de los máximos voltaje de entrada estándar de los ADC.
En el caso de emplear un ADC de 3.3 volts, entonces se tendría que utilizar un circuito
atenuador. En la tabla 3.3 se concentran las especificaciones del sensor.
Especificaciones del filtro, atenuador y offset. Como se indica en los requerimientos
generales del sistema, el sincrofasor está planeado para realizar, medición de armónicos,
de tal modo que si se desea analizar hasta el 9 armónico, un filtro pasa bajas con
frecuencia de corte de 540 Hz. es el adecuado. Sin embargo una frecuencia de corte de
1kHz. es recomendada en el estándar 519 de la IEEE [53], en donde se estipula que: El
efecto de interferencias producidas por corriente y/o tensiones no es uniforme a lo largo
de todo el espectro de audio. Los equipos de comunicaciones en combinación con el
oído humano, presentan una sensibilidad para audiofrecuencias que tiene un máximo a
una frecuencia cercana a 1,000 Hz.
Los TP y los TC, entregan voltajes de salida por arriba de 5 volts, que es el máximo
voltaje de entrada de los ADC, por lo tanto, independientemente de que el voltaje del
ADC sea de 5 o 3.3 volts, el acondicionador de nivel es del tipo atenuador. En el caso
de que el ADC sea de 5 volts y la impedancia de salida del TC sea la apropiada,
entonces se puede hacer una conexión directa del TC al ADC. De acuerdo a la ecuación
(3.11) el voltaje de offset dependiendo del voltaje del ADC pudieran ser 1.66 volts o 2.5
volts. En la tabla 3.3 se muestran las especificaciones.
Tabla 3.3 Especificaciones de los sensores, del filtro, atenuadores y offset.
Sensores
Requerimientos Características
TP Voltaje de entrada 240V
Voltaje de Salida 12V @ 500mA
TC Relación de Corriente 5:5
Atenuador TP Divisor de voltaje de 12 a 5 ó 3.3V
Atenuador TC Seguidor de Voltaje
Circuito Offset Voltaje de referencia de 2.5V ó 1.66V
Especificaciones del ADC. El rango de voltaje considerando el 20% de sobretiro es de
0 144 volts, que en volts pico son 203.64 volts y 407.29 volts pico-pico, aplicando la
ecuación (3.16) utilizando un volts de resolución, se tiene que n = 9 bits. Por lo tanto se
selecciona un ADC de 10 bits. Las demás especificaciones se generaron en los
requerimientos de diseño.

Capítulo 3 - 19
Especificaciones del Sistema Digital. Para la aplicación del sincrofasor en la medición
de líneas de transmisión, midiendo el fasor cada segundo, la selección de la CPU se
queda con un mínimo de limitaciones, pudiendo realizar esta tarea un microncontrolador
o un microprocesador o un DSP de 8 o más bits, sin embargo, si se desea que el mismo
sistema se emigre a otras aplicaciones, se recomienda que se seleccione desde un
principio una CPU con buenas características funcionales en cuanto a velocidad de
cálculo y número de bits. Actualmente existen en el mercado DSP, microprocesadores y
microcontroladores de 16 bits o más y de 20 MIPS o más. Por el momento y con la
finalidad de generar el diagrama a bloques específico y detallado se deja como única
característica que el CPU cuente con una interrupción externa. En la tabla 3.4 se
concentran dichas especificaciones.
Tabla 3.4 Especificaciones del ADC y Sistema Digital
ADC y Sistema Digital
Requerimientos Características
ADC
Resolución: 10 bits mínimo
Canales: 6 canales mínimo
Tiempo de conversión: 32 microsegundos máximo
CPU DSP o microprocesador con una interrupción externa con
activación por flancos de subida
Memoria de Programa 8 Kbytes mínimo
Memoria de Datos 8 Kbytes mínimo
Puerto Serial 1 UART con baud rate variable mínimo
Puerto Paralelo 16 bits mínimo
Temporizador Con bandera de sobre flujo o con salida por comparación
3.5.1 Diseño a bloques especifico.
Clarificados los requerimientos de diseño, seleccionadas las soluciones y dadas las
especificaciones generales del sistema y subsistemas, se juntan los bloques para generar
un diagrama a bloques detallado del sincrofasor. El siguiente paso después de este
diagrama sería seleccionar componentes comerciales para todos y cada uno de los
bloques descritos, para a su vez, generar otro diagrama a bloques con los elementos con
los cuales se implementará la solución final. En la figura 3.21 se describe mediante un
diagrama a bloques la arquitectura general del sincrofasor

Capítulo 3 - 20
Figura 3.21 Diseño a bloques de la arquitectura del sincrofasor
OSC CPU
Memoria de Programa
Memoria de Datos
Controlador de
Interrupciones
Puerto Serial
(SCI)
Puerto Paralelo
GPS
IPPS UTC
Local
Remota Sistema de
comunicación
remota
Rx
Rx
Tx
Temporizador
S/H
ADC
6 canales

Capítulo 3 - 21
3.6 Selección y justificación de componentes
Selección del CPU. Si se compara la figura 3.20 Sistema Procesador Digital con la
figura 3.21 Diseño a bloques de la arquitectura del sincrofasor, se observa que la mayor
parte de los bloques están concentrados en el sistema procesador digital. El CPU a su
vez, por su carácter de maestro en el sistema maestro esclavo de los sistemas con
procesadores digitales, debe ser el primer dispositivo a seleccionar, puesto que los
demás elementos se deberán subordinar a las características de éste. Actualmente las
opciones más usuales para cubrir la función del CPU son: los microcontroladores, los
microprocesadores y los DSP, en lo que se refiere a concentración de periféricos junto
con un CPU, los microcontroladores son la mejor opción, sin embargo los DSP y los
microprocesadores cuentan con mejores características funcionales en cuanto a
velocidad de procesamiento. Los microprocesadores están diseñados para manejar
grandes cantidades de memoria, lo cual hacen del sistema mínimo un sistema muy
complejo de implementar, esta desventaja, aunada con que el sistema no requiere de
tanta memoria hacen del DSP una mejor opción. Consultando la referencia [54]
“POCKET GUIDE TO DSP PROCESSORS AND CORES” se encuentra que existen
los “hybrid DSP/microcontroller core” que están constituidos por un DSP y periféricos
integrados en una misma pastilla de circuito integrado (Chip). En este tipo de
dispositivos se concentran las mejores características de un microcontrolador, que
principalmente son los periféricos integrados con un CPU, con las mejores
características del DSP que principalmente es la alta velocidad de procesamiento. En la
guía se observa que dentro del mismo rango de características funcionales, los DSP
microcontroladores de la familia C2000 de Texas Instrument son los más económicos (2
US dólares). Cabe mencionar también que, la familia C2000 fue la primera plataforma
en la que tanto TI como Terceras Partidas, desarrollaron módulos de evaluación y
herramientas de programación que facilitan el diseño y el desarrollo.
En la guía de selección de la familia C2000 [55] se presentan dos subfamilias la C24X
de 16 bits y la C28X de 32 bits, ambas subfamilias cumplen con los requerimientos para
el diseño del sincrofasor, con la diferencia de que el dispositivo más económico de la
familia C28X tiene un costo de 18 US dólares, que es relativamente más costoso
comparado con el más económico de la familia C24X que es de 2 US dólares. Dentro de
la subfamilia C24X, el dispositivo LC2407A, es el más completo en cuanto a cantidad
de memoria y dispositivos de E/S integrados. Comparando el diagrama a bloques de la
figura 3.21 con la figura 3.22 diagrama a bloques de la arquitectura interna del
LC2407A [56, 57] se observa que la mayoría de los periféricos necesarios para la
implementación del sincrofasor, se encuentran embebidos en el dispositivo. En la tabla
3.5 se describen las características específicas de los periféricos.

Capítulo 3 - 22
Figura 3.22 Arquitectura del LC2407A [56]
De acuerdo a los requerimientos antes descritos, se tiene que el LC2407A cuenta con 16
canales de ADC de 10 bits, un tiempo de conversión de 375 ns y un VADC de 3.3 volts,
32K de memoria de programa Flash con palabra de 16 bits, 2.5 K de memoria de datos
RAM con palabra de 16 bits, controlador de interrupciones con 5 interrupciones
externas activas con flancos de subida y de bajada, UART puerto serial SCI con
BaudRate variable, manejador de eventos (timer) con salida para activación de inicio de
conversión del ADC (ADCSOC), puertos paralelos con capacidad de 41 terminales.

Capítulo 3 - 23
Tabla 3.5 Características del los periféricos del LC2407A [56]
Como se mencionó anteriormente, la familia C2000 cuenta con las herramientas de
hardware y de programación que facilitan el diseño de sistemas con DSP, Existen
módulos de desarrollo denominados “stand-alone module” los cuales cuentan con el
DSP y el mínimo de componentes que permiten la programación de la memoria flash
“on board”, es decir con el DSP soldado a la tarjeta, lo anterior tiene la ventaja de poder
cambiar el programa las veces que sean necesarias si necesidad de desmontar los
circuitos. Por la misma razón de que tienen el mínimo de componentes, tienen la ventaja
de ser muy económicas, además de que permiten también probar el programa antes de
grabarlo en flash. Para buscar productos relacionados con la familia C2000, se consulta
la página Texas Instrument DSP Developers´ Village [58], para el DSP LC2407A, se
encontró el módulo eZdspTM
LF2407 de la empresa Spectrum Digital, Inc. El módulo
eZdsp resultó ser el más básico y económico, además de que permite hacer pruebas del
software y la programación de la flash on board. Una vez programada la memoria flash,

Capítulo 3 - 24
el LC2407A trabaja de manera independiente y transparente de los demás componentes
en la tarjeta [59]. En la figura 3.23 se muestra el diagrama a bloques de la tarjeta, la cual
cuenta con conectores que permiten la conexión de todas las terminales del DSP.
Figura 3.23 Diagrama a bloques del modulo eZdspTM
LF2407 [59]
Selección del GPS. Como se mencionó en los requerimientos de diseño, existen
diversos modelos de receptores GPS, sin embargo, en un primer criterio se pueden
discriminar la mayoría de ellos, en primer instancia, se eliminan los modelos cerrados,
es decir los que cuentan únicamente con una pantalla y un teclado para obtener la
información, dentro de estos modelos, existen algunos que cuentan con las salidas del
1PPS y un puerto serial con el protocolo NMEA, sin embargo, la interfaz del teclado y
la pantalla son innecesarias y encarecen el prototipo. El siguiente nivel de receptores
GPS que tienden a dispositivos más básicos son los módulos para aplicaciones de
sistemas embebidos, estos módulos viene sin gabinete y con los elementos necesarios
que permiten disponer de la señal de 1PPS y el protocolo NMEA, el siguiente nivel más
básico seria el desarrollo del receptor GPS a partir de circuitos integrados, esta última
opción se descarta debido a que el objetivo de este trabajo es el desarrollo de
sincrofasores y no el del receptores GPS el cual, sería interesante desarrollar en otro
trabajo futuro. En la referencia [60] se enlista una serie 66 empresas de productos y
servicios en GPS. Haciendo una referencia cruzada entre las empresas que
comercializan el módulo para aplicaciones embebidas con las características antes
mencionadas y que cuenten con un distribuidor en México, se identifica la empresa
Trimble. Además de que Trimble fue la primera empresa no militar en desarrollar y
comercializar productos con GPS. Consultando la guía de productos de Trimble [61] el
producto más básico y económico es el módulo ACE III GPS™, el módulo cuenta con

Capítulo 3 - 25
el protocolo NMEA disponible en UART con niveles TTL y con la señal de 1PPS con
niveles TTL. En la tabla 3.6 se muestran las especificaciones técnicas del módulo.
Tabla 3.6 Especificaciones técnicas del módulo ACE III GPS™ [48]
Selección del sistema de comunicación remota. En los requerimientos de diseño se
determinó que en función de los requerimientos, podría haber dos tipos de sistemas de
comunicación. En el diseño a bloques de la arquitectura del sincrofasor se optó por el
sistema óptimo. Sin embargo el DSP seleccionado únicamente cuenta con un UART, de
tal modo que, para poder implementar este modo partiendo de un solo UART se
sugieren las siguientes opciones:
a) Que en el DSP se desarrolle el receptor UART TX, mediante software
b) Que se desarrolle un sistema multiplexor que permita conmutar las
comunicaciones entre el DSP, el dispositivo remoto y el GPS.
En la figura 3.24 se muestran los diagramas a bloque de las dos opciones. La opción
mediante software, consume tiempo de proceso del DSP, que para futuras aplicaciones
en las que se requiera velocidad de procesamiento, resulta poco práctica. Además la
opción por multiplexor permite más flexibilidad en las comunicaciones, por ejemplo,
permitiría una conexión transparente (sin pasar por el DSP) entre el dispositivo remoto
y el GPS.

Capítulo 3 - 26
Figura 3.24 Opciones para la comunicación entre dispositivos seriales.
Dispositivo remoto. Dependiendo de la infraestructura en comunicaciones del usuario
final, se pueden seleccionar diversos dispositivos remotos. El dispositivo remoto puede
variar desde una simple conexión, en el caso de que se tuviera líneas de comunicación
dedicadas hasta una tarjeta de comunicación vía Internet con aplicaciones Web. Para
fines prácticos, en este desarrollo se opta por utilizar una computadora personal con una
aplicación mediante la cual se puedan conectar dos sincrofasores para comprobar el
correcto funcionamiento del sistema. Los niveles de voltaje del UART del DSP son
TTL a 3.3volts, mientras que el UART de la PC funciona con niveles RS-232, por lo
tanto, se hace necesario conectar un adaptador de niveles de TTL a RS-232 y viceversa.
En la figura 3.25 se muestra el diagrama a bloques completo del sistema de
comunicación entre los tres dispositivos; incluyendo el multiplexor y el circuito
adaptador de TTL a RS-232.
Figura 3.25 Sistema completo de comunicación.
Selección de los sensores. En la sección de especificaciones del sistema, se
determinaron las características de entrada y salida de los TP y los TC. Para este tipo de
DSP
MUX
DSP
RX
GPS
Dispositivo remoto TX Puerto RX
GPS Dispositivo remoto
RX TX
a)
b)
MUX
DSP
INT Tx
Rx
GPS 1PPS
Tx
RS-232

Capítulo 3 - 27
elementos, existe una gran variedad de productos y de fabricantes, por tal motivo, como
primer criterio de selección se opta por los elementos de los distribuidores locales. El
TP seleccionado es del tipo Racom con voltaje de entrada de 240V y voltaje de salida de
12V @ 500mA. El TC seleccionado es del tipo Racom con relación de corriente 5:5
Cálculo de los atenuadores, filtro y referencia de voltaje (offset).
Atenuador de voltaje y filtro: Conocidos el voltaje de salida del TP denominado Vi en
ecuación (3.5) y el voltaje máximo de entrada del ADC denominado Vo en la misma
ecuación, se propone R2 y se calcula R1
KR 12
KR 94.11
Dado el valor no comercial para R1, se utiliza un preset de precisión.
Proponiendo una frecuencia de corte de 1KHz, se calcula el capacitor C en la ecuación
(3.9). nFC 241 Para el caso del capacitor se aproxima al valor comercial más próximo
que en este caso es de
nFC 2201
Recalculando la frecuencia de corte para el valor comercial del capacitor se tiene que
fc = 1.09KHz
En la figura 3.26 se muestra el diagrama de bode del filtro, de donde se observa que:
Punto A = Frecuencia: 10, Ganancia: –3.61
Punto B = Frecuencia: 1.09K, Ganancia: –6.61
Ganancia B-A = -3dB

Capítulo 3 - 28
Figura 3.26 Diagrama de bode del filtro del TP.
Atenuador de corriente y filtro: De acuerdo a especificaciones del TC se puede obtener
un voltaje de 5V a la salida con una corriente máxima de entrada de 5 amperes, como el
VADC es de 3.3volts, entonces, se puede utilizar un divisor de voltaje para atenuar la
salida de 5volts a 3.3 volts, en la figura 3.27 se presenta el equivalente para el TC del
bloque del atenuador y filtro de la figura 3.21.
Figura 3.27 Atenuador de corriente y filtro.
Al igual que el atenuador del TP se propone R3 y se calcula R4
KR 13
7144R
Frecuencia [Hz]
Fas
e [d
eg]
10
100
1K
10K
10
- 1
5
- 4
0
0
Frecuencia [Hz]
10
1K
100
10K
-
10
- 2
0
B A G
anan
cia
[dB
]

Capítulo 3 - 29
Dado el valor no comercial para R1, se utiliza un preset de precisión.
Proponiendo una frecuencia de corte de 1KHz, se calcula el capacitor C en la ecuación
(3.9). nFC 382 Para el caso del capacitor se aproxima al valor comercial más próximo
que en este caso es de
nFC 3302
Recalculando la frecuencia de corte para el valor comercial del capacitor se tiene que
fc = 1.16KHz
En la figura 3.28 se muestra el diagrama de bode del filtro, de donde se observa que:
Punto A = Frecuencia: 10, Ganancia: –7.61
Punto B = Frecuencia: 1.16K, Ganancia: –10.62
Ganancia B-A = -3dB
Figura 3.28 Diagrama de bode del filtro del TC.
Referencia de voltaje offset: Conocido el VADC de 3.3 volts y aplicando la ecuación
(3.11) se tiene que:
voltsVofs 66.1
Gan
anci
a [d
B]
-
5
Frecuencia [Hz]
10
1K
100
10K
-
15
- 2
5
B A
Frecuencia [Hz]
Fas
e [d
eg]
10
100
1K
10K
10
- 1
5
- 4
0

Capítulo 3 - 30
Comercialmente existen referencias de voltaje de 2.5 volts y ajustables, Las referencias
de voltaje en circuito integrado se utilizan principalmente, cuando a causa de grandes
cambios de temperatura (variaciones hasta de 30 grados Celsius) los divisores de voltaje
con resistencias, no mantienen al voltaje deseado, situación que se recomienda que no
suceda en el equipo, puesto que los procesadores DSP de aplicación comercial requieren
de cierta estabilidad térmica. La otra opción es el divisor de voltaje que bajo control de
grandes variaciones de temperatura resulta igualmente eficiente. Considerando las
variaciones de temperatura están controladas, se opta por utilizar el divisor de voltaje.
3.6.1 Diseño a bloques detallado
Como la información de los sincrofasores estará concentrada en el procesador central,
entonces, el esquema de comunicaciones más conveniente en tres los tres dispositivos es
el de que el procesador central actué como maestro y el DSP y el GPS como esclavos,
de tal manera de que la PC que se utiliza como procesador central, controle mediante el
multiplexor el flujo de la información. En el apartado 3.4 se analizarán todos los
posibles modos de conexión y comunicación entre los tres sistema. El diseño y detalles
del multiplexor y del circuito RS-232 se presentan en el apartado 3.9.1, dejándose en
bloques por el momento. Finalmente en la figura 3.28 se concentran todos los elementos
seleccionados en un diagrama a bloques detallado.

Capítulo 3 - 31
Figura 3.29 Diagrama a bloques detallado.
3.7 Pruebas y calibración de sensores y acondicionadores
de señal
3.7.1. Sensor de voltaje y acondicionador de señal
Con el sensor de voltaje seleccionado y el acondicionador de señales calculado en el
apartado anterior se procese a armar el subsistema del sensor de voltaje y su
acondicionador.
En el diseño del instrumento se determino la utilización de un ADC de 10 bits, lo cual
nos permite 1023 pasos de medición, que en términos de voltajes de AC nos da un
rango de -511.5 volts a +511.5 volts pico-pico, considerando también que el VADC es 3.3
volts y que por lo tanto el Vofs es de 1.66 volts, entonces se debe calibrar el
acondicionador de señal de tal manera que para un voltaje de entrada de 511.5 volts se
tenga un voltaje de salida de 3.3 volts en la figura 3.30 se muestra el proceso deseado.
TP
TC
Línea Trifásica
R1
R4
R2
R3
C1
C2
VCC
3
3 3
3
MUX
GPS
1PPS
Tx
RS-232
DSP CPU INT
OSC/PLL
WD
Timer
Digital I/O
Rx Tx
SCI
UART
Program
Memory
Data
Memory
ADC 10bits 16
Channels Digital

Capítulo 3 - 32
Figura 3.30 Proceso de acondicionamiento del sensor de voltaje.
Una de las formas más sencillas de agregar una componente de CD a una señal de AC
es mediante la conexión enserie de la fuente de AC con la fuente de CD en la figura
3.31 se muestra la conexión.
Figura 3.31 Conexión de la fuente de voltaje de referencia offset con la señal de voltaje.
Con la finalidad de reducir el rango de calibración del voltaje de offset, se pone una
resistencia en serie al con el potenciómetro de calibración, con la finalidad de construir
un solo circuito de offset que alimente a las 6 señales, se sugiere que la corriente que
proporcione el circuito no sea tan pequeña, es decir menos del orden de los mili
amperes, la resistencia en serie y el potenciómetro de calibración se proponen de
1Khom, de tal manera que el rango de calibración del offset se reduce de 0 a 2.5 volts,
como se muestra en la figura 3.32 y en los cálculos siguientes.
Figura 3.32 Circuito de la fuente de voltaje de referencia offset.
Transformador y
divisor de voltaje
Compensador de
CD
(Offset)
1023
0
+511.5
-511.
+1.65
-1.65
1.65 3.3

Capítulo 3 - 33
vRK
RV
ofs
ofs
ofs 51
(3.17)
Si VVofsRofs 0;0
Si VVofsKRofs 5.2;1
0V Vofs 2.5V
En la figura 3.33 se muestra el circuito final del sensor de voltaje, el circuito divisor de
voltaje y el circuito del voltaje de referencia en donde R2 de acuerdo a los cálculos
presentados en el apartado anterior es de 1Kohm y R1 de 1.94Kohms, debido a que este
último no es un valor comercial para una resistencia, por lo tanto se propone un
potenciómetro de 2Kohms. El potenciómetro también se hace útil ya que se requerirá de
algún ajuste debido a la imprecisión de los transformadores que se determinaron
también en el apartado anterior.
Figura 3.33 Circuito del sensor de voltaje y su acondicionador
3.7.2. Calibración del acondicionador de señal del sensor de voltaje.
Como la mayor parte del tiempo las mediciones se estarán realizando en el rango de
120Vrms 20%, se procede a hacer la calibración en 120Vrms (169.70Vp o 339.4Vpp).
Considerando que el máximo voltaje de medición en volts pico pico de 1023Vp
corresponden a un voltaje de entrada al ADC de 3.3 VppADC, se tiene la siguiente
relación directamente proporcional:
3.3VppADC 1023Vpp
XVppADC 339.4Vpp
En donde XVppADC son los volts pico pico a la entrada del ADC cuando el voltaje a la
entrada del sensor de voltaje es 339.4 volts pico pico o 120 volts rms. De la relación
anterior se tiene que:
Vpp
VppVVX
ppADC
ppADC1023
)4.339)(3.3( (3.18)

Capítulo 3 - 34
VVX ppADC 094.1
En la figura 3.34 se muestra la señal que se debe “ver “a la salida del acondicionador de
señal después de ajustar el nivel pico con R1 y el voltaje de offset con Rofs
Del análisis anterior se propone una ecuación general para la calibración del
acondicionador de señal.
VLIRVLSR
VCppVVX ADC
ppADC
))((
(3.19)
en donde
XVppADC es el voltaje pico de la señal a la entrada del ADC.
VADC es el máximo voltaje de entrada del ADC
VCpp es el voltaje pico pico de la señal que se utiliza para calibrar
VLSR - VLIR es el rango total pico pico de la medición
2
Figura 3.34 Forma de onda de la señal de voltaje calibrada
3.7.3. Sensor de corriente y acondicionador de señal
El rango requerido para la medición de corriente es de 0 a 5 amperes, el ADC de 10
bits, permite 1023 pasos de medición, que en términos de voltajes de AC da un rango
de -5.11 amperes a +5.11 con una resolución de 0.01 amperes pico-pico, considerando
también que el VADC es 3.3 volts y que por lo tanto el Vofs es de 1.66 volts, entonces se
debe calibrar el acondicionador de señal de tal manera que para una corriente de entrada
de 5.11 amperes se tenga un voltaje de salida de 3.3 volts en la figura 3.35 se muestra el
proceso deseado.
V
1.65
ms
2.19 V
0.54V
0.54V 1.09 Vpp
0.54 V
1.65 V
t

Capítulo 3 - 35
Figura 3.35 Proceso de acondicionamiento del sensor de corriente.
De manera análoga a los sensores de voltaje se determina el voltaje de offset. En la
figura 3.36 se muestra el circuito final del sensor de corriente, el circuito divisor de
voltaje y el circuito del voltaje de referencia en donde R3 de acuerdo a los cálculos
presentados en el capitulo de diseño es de 1Kohm y R4 de 714 ohms, debido a que este
ultimo no es un valor comercial para una resistencia, entonces se propone un
potenciómetro de 1Kohms. El potenciómetro también se hace útil ya que se requerirá de
algún ajuste debido a la imprecisión de los transformadores que se determinaron
también en el capitulo anterior.
Figura 3.36 Circuito del sensor de corriente y su acondicionador
3.7.4. Calibración del acondicionador de señal del sensor de corriente.
Para calibrar el acondicionador de voltaje del sensor de voltaje se utilizó un fuente de
voltaje de 120 volts rms y una carga resistiva tal que se genera una corriente de 0.7
amperes (0.98 amperes pico), sustituyendo para valores de corriente en la ecuación
(3.19) se tiene que:
XVADC = Amp
AmpV
23.10
)98.1(3.3
Transformador y
divisor de voltaje
Compensador de
CD
(Offset)
1023
0
+5.11
-5.11
+1.65
-1.65
1.65 3.3

Capítulo 3 - 36
XVADC = 0.6393 V
En la figura 3.37 se muestra la señal que se debe “ver “a la salida del acondicionador de
señal después de ajustar el nivel pico con R4 y el voltaje de offset con Rofs que ya con
antelación se calibró con los sensores de voltaje
Figura 3.37 Forma de onda de la señal de corriente calibrada
3.7.5. Subsistema de sensores y acondicionamiento de señal.
Como el medidor es trifásico, se triplican los subsistemas de medición de voltaje y de
corriente, en la figura 3.38 se muestra el subsistema completo. Como puede apreciarse,
el circuito de offset es compartido por los seis sensores. Los primarios de los sensores
se conectan directamente al sistema eléctrico a medir. Las salidas de los
acondicionadores de señal, se conectan directamente al ADC del DSP.
V
1.65
1.68 V
0.03
1 0.03 0.63 Vpp
0.03 V
1.65 V
t

Capítulo 3 - 37
Figura 3.38 Subsistema de sensores y acondicionamiento de señal.
Con la adición del circuito de offset y el potenciómetro de ajuste de la amplitud se
probaron los filtros y se encontró que estos se movieron en la frecuencia de corte, por
tal motivo, se procedió a recalcular el valor de los capacitares. En la figura 3.38 se
muestran los nuevos valores y en la figura 4:11 se muestran los diagramas de bode. Para
el caso de los TP los parámetros quedan como sigue
Frecuencia: 93.63 , Ganancia: –15.6
Frecuencia: 1.01K , Ganancia: –18.37
Ganancia = 3dB
Para los TC
Frecuencia: 54.68, Ganancia: –20.84
Frecuencia: 1.01K , Ganancia: –23.9
Ganancia = 3dB
a) TP
5v
1k
2k
1k
1k
1k
1k
1k
1k
1k
1k
2k
2k
TC1
TC2
TC3
120nF
65nF
120nF
120nF
65nF
65nF
ADCN0
ADCN1
ADCN2
ADCN3
ADCN4
ADCN5
1k
1k
TP2
TP1
TP3

Capítulo 3 - 38
b) TC
Figura 3.39 Diagramas de Bode de los filtros a) TP b) TC.
100 10 1 10K 1K 100K
Frecuencia [Hz
-20
-80
-40
-60
Gan
anci
a [d
B
100 10 1 10K 1K 100K
-10
-70
-30
-50
Frecuencia [Hz
Gan
anci
a [d
B
100 10 1 10K 1K 100K
Frecuencia [Hz
10
-40
-15
Fas
e [g
rad
os
-65
100 10 1 10K 1K 100K
Frecuencia [Hz
10
-40
-15
Fas
e [g
rad
os
-65

Capítulo 3 - 39
3.8 Integración del subsistema de sensores y
acondicionamiento de señal con el ADC del DSP
Con las señales de los acondicionadores de señal conectadas directamente al ADC se
procede a hacer pruebas de medición. Como el ADC es de 10 bits, entonces se tiene que
La resolución en voltaje del ADC está dada por
12
n
ADCVV (3.20)
Sustituyendo datos en la ecuación (3.20) se tiene
00322580.01023
3.3
VV V
Es decir que cuando el dato digital del ADC (DADC) sea uno, entonces, el voltaje en la
entrada del ADC (X VADC) es 0.00322580V y la relación entre DADC y XVADC queda
determinada por
XVADC = DADC V (3.21)
Para determinar el valor instantáneo de voltaje o de corriente una vez que el dato ya se
encuentra en formato digital dentro del DSP, se aplica un proceso inverso al del
acondicionamiento, es decir, que como se agrega a la señal un offset de 1.65 volts, se
procede a sustraerlo mediante un procesamiento digital. En donde el voltaje medido
(Vm) queda determinado por
Vm = DADC - Dofs (3.22)
Mediante la ecuación (3.21) se encuentra que el offset agregado a la señal de 1.65V
equivale a un DADC de 511.5 o 1FFh. Sustituyendo el valor de Dofs en la ecuación (3.22)
se tiene que para cualquier momento
Vm = DADC – 511.5 (3.23)
Desarrollando un programa que resuelva la ecuación (3.23), calcule la amplitud y
muestre el resultado mediante un emulador, se comprueba el correcto funcionamiento
de la integración del subsistema de sensores y acondicionamiento de señal con el ADC
del DSP. En la figura 3.40 se muestra un ejemplo del proceso, incluso, mediante este
proceso, se puede lograr un ajuste fino de la calibración, una vez obtenida la forma de
onda de la figura 3.34, se procede a corroborar el voltaje pico medido de la señal de
referencia con el dato digital obtenido y calculado mediante el ADC y el DSP
respectivamente. Analíticamente se tiene que:
De la ecuación (3.21) DADC = V /XVADC
Para XVADC = 2.19V DADC = 679
Aplicando la ecuación (3.23) Vm = 679 – 511.5
Vm = 168 volts

Capítulo 3 - 40
Figura 3.40 Proceso de integración y prueba.
3.9 Pruebas del sistema GPS.
Ante de hacer la integración del GPS con el DSP se procede a probarlo la tarjeta GPS
por separado. El GPS ACE III [48] cuenta con un conector heder de 8 terminales (ver
tabla 3.5) mediante el cual el sistema se alimenta con 5 volts. En este conector también
se encuentran dos puertos seriales asíncronos universales (UART) y la terminal del
1PPS.
Tabla 3.5 Conector heder de 8 terminales
Terminales del sistema GPS
# Pin Función Descripción
1 TXD 2 Port 2 transmit, CMOS/TTL NMEA
2 Prime Power 5VDC ±5%, 95 mA typical
3 TXD 1 Port 1 transmit, CMOS/TTL
4 Backup Power +3.2VDC to +5.25VDC, 4µA typical
5 RXD 1 Port 1 receive, CMOS/TTL
6 1 PPS Pulse-Per-Second, CMOS/TTL
7 RXD 2 Port 2 receive, CMOS/TTL
8 GND Ground, Power and Signal
El Puerto serial 1 está dedicado al protocolo binario bidireccional TSIP bi-directional.
El Puerto serial 2 está dedicado al protocolo NMEA 01883 el cual se utilizará para
monitorear la sincronía y obtener el UTC. Ver apartados 3.4 y 3.4.3 del la referencia
[48]. Las características del UART NMEA se presentan en la tabla 3.6
169 V
2.19 V
Sensor
y
acondicionador
ADC
2.19V 679
Vm = 679 - 511.5
Vm = 168 V
Calcula Vm
Lee ADC
DSP
DADC = 679

Capítulo 3 - 41
Tabla 3.6 Características del estándar NMEA 0183
UART NMEA
Baud Rate Bits de datos Paridad Bits de paro
4800 8 Ninguna 1
El formato del mensaje se puede consultar en el apéndice E.2 de la referencia [48].
Por omisión, una vez que se energiza, el receptor GPS transmite cada segundo la trama
GGA de tiempo y posición estacionaria y la trama VTG de velocidad terrestre. Ver
apéndices E.3, E.4.1 y E.4.6. La trama GGA tiene el siguiente formato:
$GPGGA,hhmmss,llll.lll,a,nnnnn.nnn,b,t,uu,v.v,w.w,M,x.x,M,y.y,zzzz*hh <CR><LF>
En donde el UTC en formato hhmmss (horas minutos y segundos) es enviado como
primer dato de la trama GGA. Ver tabla 3.7.
Tabla 3.7 Parámetros de la trama GGA del estándar NMEA 0183 [48]
GGA – GPS Fix Data Message Parameters
Field Capítulo 5 Description
1 UTC of Position
2,3 Latitude, N (North) or S (South)
4,5 Longitude, E (East) or W (West)
6 GPS Quality Indicator: 0 = No GPS, 1 = GPS, 2 = DGPS
7 Number of Satellites in Use
8 Horizontal Dilution of Precision (HDOP)
9, 10 Antenna Altitude in Meters, M = Meters
11, 12 Geoidal Separation in Meters, M=Meters. Geoidal separation is the
difference between the WGS-84 earth ellipsoid and mean-sea-level.
13 Age of Differential GPS Data. Time in seconds since the last Type 1 or 9
Update
14 Differential Reference Station ID (0000 to 1023)
hh Checksum
Pruebas de la trama GGA y la señal 1PPS de un solo receptor GPS.
Para verificar y familiarizarse con la trama GGA, se conecta el pin TXD2 (terminal 1)
del GPS a través de un convertidor de TTL a RS-232 a un puerto COM de la
computadora utilizando la interfaz “HyperTerminal” del sistema operativo WINDOWS.
Por otro lado, la señal de 1PPS se visualiza directamente conectando la salida 1PPS
(terminal 6) a un canal de un osciloscopio. Con la finalidad de visualizar la sincronía
que existe entre la señal 1PPS y la trama GGA se conecta la terminal TX2 al otro canal
del osciloscopio. En la figura 3.41 se muestra el diagrama a bloques de la prueba en
donde la interfaz de la computadora HyperTerminal se debe configurar de acuerdo a la

Capítulo 3 - 42
tabla 3.6. También es importante ubicar la antena del receptor GPS sin ningún obstáculo
en línea de vista con la bóveda celeste.
Figura 3.41 Visualización de la trama NMEA y el 1PPS.
Observaciones.
1. En el momento en que se energiza el receptor se encontró que:
Inmediatamente se transmite el formato de la trama GGA, pero sin datos,
ejemplo.
$GPGGA,,,,,,,,,,,,,,*hh <CR><LF>
Inmediatamente se genera la señal de 1PPS.
2. En condiciones de vista parcial de ½ de la bóveda celeste y después de que se
energiza el receptor, tarda hasta dos minutos en detectar por lo menos un
satélite. La detección del satélite se manifiesta con el envió completo de la trama
GGA, con el despliegue de la UTC cambiando cada segundo y con la
sincronización de la señal de 1PPS con la trama GGA. La evidencia de que
únicamente se detectó un satélite se muestra en la trama GGA en el campo 7
“número de satélites en uso”.
3. Cuándo una vez sincronizado el receptor GPS, se pierde por alguna razón la
señal de todos los satélites, se encontró que las tramas GGA y VTG son
transmitidas aun sin sincronía satelital, por omisión, se transmiten las últimas
tramas que se generaron antes de la perdida de la sincronía, es decir, sin cambio
del UTC en cada segundo. Como el medidor se encuentra en un punto fijo,
tampoco hay cambio de coordenadas, ni de altura y ni de velocidad, es decir que,
con sincronía o sin ella, estos parámetros permanecen sin cambio. Otro
parámetro aparte del UTC que deja en evidencia la pérdida de sincronía es el
parámetro Q (campo 6 de la trama GGA), el parámetro Q es el indicador de
calidad GPS de la trama GGA el cual indica con un cero que no hay recepción
GPS.
TTL a
RS-232
Osciloscopio
Hyper-
terminal
GPS
Tx
IPPS

Capítulo 3 - 43
Pruebas de la señal 1PPS entre dos receptores GPS.
Para verificar la sincronía existente entre las señales de 1PPS de dos receptores GPS, se
conectan cada una de las señales a cada uno de los canales de un osciloscopio, como se
muestra en la figura 3.42.
Figura 3.42 Visualización de las señales 1PPS de dos receptores GPS.
Observaciones.
1. Una vez sincronizados ambos receptores, las señales 1PPS llegan al mismo
tiempo a ambos receptores.
2. Se desincronizó uno de los receptores ocultando la antena, después de 15
minutos el desfase fue de 4 microsegundos (0.08 grados).
De la información obtenida anteriormente, se determina que para que sea valida la
información, es necesario que el sistema GPS se encuentre sincronizado. Uno de los
métodos que se proponen para detectar si el receptor está en sincronía, es mediante la
revisión de los incrementos en cada segundo del UTC, de tal manera que si se reciben
dos datos con el mismo UTC se infiere que hay perdida de sincronía. Otra de las formas
para detectar la perdida podría ser mediante el parámetro Q. En la figura 15 se muestra
la traza del osciloscopio que se obtuvo en el experimento de la figura 3.41.
Sincronía entre 1PPS, cálculo del fasor y captura del UTC
La señal 1PPS es conectada al DSP a través de la terminal de una interrupción externa,
la interrupción deberá ser programada de tal manera que ésta sea sensitiva con los
flancos de subida,
Una vez que el receptor GPS terrestre se ha sincronizado con el satélite, la cadena de
datos NMEA que contienen el UTC es transmitida 22ms después de que el GPS generó
la señal de 1PPS. En la figura 15 se muestra la sincronía entre el 1PPS, la cadena de
datos NMEA y una porción de la señal que se digitaliza. Como se puede observar, la
información obtenida de la figura 15 sugiere la forma en como se puede calcular el
fasor.
GPS 2
1PPS
Osciloscopio
GPS 1
1PPS

Capítulo 3 - 44
Figura 3.43: Sincronía entre 1PPS, Trama NMEA y señal de 60Hz a digitalizar
El estándar IEEE especifica que el estampado de tiempo se haga en el último muestreo
de la ventana. En el periodo entre el 1PPS y la trama NMEA de 22ms cabe un periodo
de la señal a digitalizar de 16.66ms. La señal 1PPS inicia el temporizador generador del
periodo de muestreo, de tal forma, que la primera de las 16 adquisiciones se presenta
1.04ms (16.6ms/ 16) después del 1PPS, por lo tanto, las adquisiciones se completan
17.70ms (1.04ms x 17) después del 1PPS y se tiene una tiempo de 4.3ms antes del
inicio de la trama GGA. El análisis anterior induce a dos posibles estrategias a seguir.
En la primera los pasos a seguir serían:
Se calculan los fasores en el tiempo de los 4.3ms.
Se espera y valida la trama GGA.
Se captura y se transmite el UTC.
Se transmiten los fasores previamente calculados.
En la segunda serían:
Se espere durante los 4.3ms la trama GGA.
Se valida la trama GGA
Se capture y se transmita el UTC
Se calculen y transmitan uno a uno cada fasor.
Si se escoge la primera opción, se debe tener la seguridad de que en los 4.3ms se
calculen los 6 fasores. Para el caso del algoritmo computacional de cálculo de los
fasores aquí presentado, los 4.3ms son suficientes, de hecho se presenta un algoritmo
que pudiera ser utilizado incluso en aplicaciones de protección, sin embargo, para la
aplicación de medición de líneas de transmisión en tiempo real para estudios de flujo de
potencia que es el motivo de este diseño, el monitoreo fasorial de la línea trifásica cada
segundo quedaría sobrado. Por tal motivo, se opta por la segunda estrategia ya que sería
la más adecuada para la medición de líneas de transmisión, debido a que la información
calculada de los fasores se tiene que transmitir en forma serial para a su vez calcular los
desfases en los extremos de la línea, comparando los 4.3ms que se podrían ahorrar con
el tiempo de transmisión de los UART, resultan insignificantes. Con una tasa de
transmisión de 4800 bits por segundo del estándar NMEA un dato UART de 10 bits se
transmite en 2.083ms. El total del tiempo consumido en todo el proceso se calcula como
sigue:

Capítulo 3 - 45
Llegada del 1PPS, arranque del temporizador de muestreo y las 16 adquisiciones
17.70ms.
Espera de la llegada de la trama GGA 4.3ms.
Validación de la trama $GPGGA, 14.58ms (cada caracter se transmite en
2.083ms).
Capturara y retransmisión de UTC hhmmss 12.49ms
Cálculo y transmisión de cada fasor, 3 caracteres para la amplitud y dos para la
fase por fasor. Por los seis fasores 62.49ms.
Total 111.56ms
Otro factor importante para seleccionar la segunda estrategia, es la de que si se desea
desarrollar el algoritmo computacional con un microcontrolador lento o utilizando un
lenguaje de alto nivel como C, se tiene tiempo suficiente para calcular los fasores antes
de que llegue el siguiente 1PPS.
Considerando la segunda estrategia como opción a seguir, el proceso sincronizado de la
medición debe seguir los siguientes pasos, ver figura 3.44.
Figura 3.44 Proceso sincronizado de la medición.
3.9.1 Diseño del multiplexor digital
Requerimientos de diseño
Como ya se mencionó en el apartado anterior, la función del multiplexor digital es la de
interconectar en forma serial el GPS, el DPS y el procesador central, que para fines de
prueba será una computadora personal (PC). Las funciones o modos de operación
propuestos para el multiplexor digital son:
Se espera el 1PPS
Se hacen las 16 adquisiciones
de los 6 canales
Se espera trama NMEA
Se captura el UTC y se transmite
Se calculan los 6 fasores y se
transmiten

Capítulo 3 - 46
Modo cero: Conectar el Tx y el Rx del DSP con el Rx y el Tx respectivamente de la
PC. Este modo se utiliza para programa desde el procesador central ciertos parámetros
del medidor no contemplados en este diseño, figura 3.45
Figura 3.45 Modo cero
Modo uno: Conectar el Tx del GPS el Rx del DSP y el Tx del DSP al Rx de la PC. Esta
conexión es el modo común de operación del instrumento, en donde, el DSP para
calcular el fasor, captura el UTC del GPS, una vez calculado el fasor, el DSP transmite
a la PC el fasor junto con el estampado de tiempo, figura 418.
Figura 3.46 Modo uno
Modo dos: Conectar el Tx del GPS con el Rx de la PC. Este modo se utilizar para
monitorear directamente desde la PC la trama GGA del GPS, figura 3.47
Figura 3.47 Modo dos
Debido a que el procesador central concentra las mediciones de todos los instrumentos,
se propone que los modos de operación del multiplexor sean seleccionados desde el
mismo procesador central. En la figura 3.48 se muestran los modos de operación del
multiplexor.
El diseño del multiplexor digital se desarrolló bajo la siguiente idea: El multiplexor se
implementó con un pequeño microcontrolador, el cual debe contar con un mínimo de 5
terminales de entrada y salida en paralelo correspondientes las terminales TxG, TxD,
RxD TxP y RxD, debe contar con un UART, en donde el Rx del UART se conecta al
Tx de la PC. La función del microcontrolador es la de recibir de la PC el modo de
operación e interconectar mediante software las terminales correspondientes.
TxP RxD TxD RxP
TxG RxD TxD RxP
TxG RxP

Capítulo 3 - 47
Figura 3.48 Modos de operación del multiplexor
Para la implementación del multiplexor se seleccionó un microcontrolador de 20
terminales AT89C2051 de Atmel con memoria flash y SCI UART [62]. En la figura
3.49 se muestran el diagrama a bloques de la implementación del multiplexor con el
AT89C2051.
Figura 3.49 Diagrama a bloques del MUX utilizando el AT89C2051
P1.5 P1.4
P1.6 P1.3
S
C
I
P1.7
AT89C2051
RS
232
16 RxD
15 RxP
TxG 17
TxD 18
TxP 2
19
MUX
10k
GPS
PC
DSP
MUX
Modo 2
TxG TxP RxP
RxD TxD
Modo 0
GPS
PC
DSP
MUX
RxP TxP
RxD TxD
TxG
GPS
PC
DSP
Modo 1
MUX
TxG RxP
TxD RxD
TxP

Capítulo 3 - 48
El divisor de voltaje conectado a la terminal RxD, se utiliza para bajar los niveles TTL
de 5 volts del multiplexor a 3.3 volts que maneja el DSP. En la referencia [63] se
presentan las hojas de especificaciones del convertidor de TTL a RS-232.
En la figura 3.50 se muestra el diagrama de flujo del proceso y el código del programa,
como se puede observar en los diagramas a bloque y flujo, todo dato transmitido por la
PC es capturado y almacenado en el registro “Modo”, si el dato capturado no es el
correspondiente a alguno de los comandos del modo de operación, el programa se
mantiene ejecutándose en el modo cero, por lo tanto, se debe asegurar que dentro del
protocolo de comunicación entre la PC y el DSP no contenga datos iguales a los
comandos del modo de operación del multiplexor. En el código del programa se asignan
los comandos “#” al Modo 0, “%” al Modo 1 y “&” al Modo 2
Diagrama de flujo del multiplexor
Interrupción serial
Modo = Puerto Serial
RETORNA
No
No
No
Modo
0
Modo = 0
? RxD = TxP Si
Si
Si
Principal
Inicia Puerto Serial
Modo = 1
?
Modo = 2
?
RxD = TxG
RxP = TxG
RxP = TxD
RxP = TxD
Modo
0

Capítulo 3 - 49
Códigos del programa del multiplexor
Figura 3.50 Diagrama de flujo y código del programa del multiplexor
3.10 Integración de los subsistemas GPS, DSP y PC.
Considerando el multiplexor MUX como un bloque central y estableciendo las
conexiones entre sistemas, como se muestra en la figura 3.49, se llega al circuito
esquemático de la integración entre los sistemas GPS, DSP y PC. En la figura 3.51 se
muestra el diagrama esquemático del circuito final con la interconexión entre el GPS el
DSP y la PC. Las pruebas de funcionamiento en la integración de los subsistemas se
realizaron utilizando el accesorio de comunicaciones HiperTermina. Se debe considera
que los UART de los cuatro dispositivos deberán estar programados de acuerdo a la
tabla 3.6. Las pruebas se realizaron como sigue:
Para el Modo 0.
Se desarrolló en el DSP el programa ECO que recibe un dato de la PC y lo
retransmite a la PC.
ORG 0000H LJMP INICIO
ORG 0023H
LJMP SERIAL
INICIO: MOV IE,#90H ;Habilita interrupcion serial
MOV SCON,#050H ;Modo serial 1, habilita recepsión. MOV TMOD,#20H ;Habilita temporizador modo 2
MOV TL1,#0FAH ;Valor de recarga BR=4800
MOV TH1,#0FAH ;Valor de recarga fo=11.059MHz SETB TR1 ;Arranca el temporizador 1
CLR A
MODO: CJNE A,#”#”,REVMODO1
LJMP MODO0
REVMODO1: CJNE A,#”%”,REVMODO2
LJMP MODO1
REVMODO2: CJNE A,#”&”,MODO
LJMP MODO2
;********************************************************************** MODO0: MOV C,P1.7
MOV P1.4,C
MOV C,P1.6 MOV P1.3,C
SJMP MODO
MODO1: MOV C,P1.5
MOV P1.4,C
MOV C,P1.6 MOV P1.3,C
SJMP MODO
MODO2: MOV C,P1.5
MOV P1.3,C
SJMP MODO ;**********************************************************************
SERIAL: MOV A,SBUF CLR RI
RETI
;********************************************************************** END

Capítulo 3 - 50
Se transmite mediante el HyperTerminal el comando “#”.
Se transmite mediante el HyperTerminal cualquier otro carácter, el DSP recibe y
retransmite el carácter a la PC, el cual se imprime en el HyperTerminal.
Para el Modo 1.
Se desarrolló en el DSP el programa Reenviar que recibe el UTC del GPS y lo
reenvía a la PC
Se transmite mediante el HyperTerminal el comando “%”.
Se imprimen cada segundo en la HyperTerminal el UTC de las trama GGA
Para el Modo 2.
Se transmite mediante el HyperTerminal el comando “&”.
Se imprimen cada segundo en la HyperTerminal, las tramas GGA y VTG
+
1uF 25V
10
0K
100K
0
+ 5V
VCC
VCC TXD
RXD GND
XINT1 GNDGND
GND
P2 DSP
0
TXD2
PPS VCCGND
1357
2468 + 5V
GPS
MAX232
C1+1
C1-3
C2+4
C2-5
V+2
V-6
R1OUT12
R2OUT9
T1IN11
T2IN10
R1IN13
R2IN8
T1OUT14
T2OUT7
DB9
1
2
3
4
5
6789
+
10
uF 2
5V
+
10
uF 2
5V
+
10uF 25V+
10uF 25V
+ 5V
15
RX
GND
TX
GND
AT89C2051
RST/VPP1
VCC20
XTAL15
XTAL24
P1.0/AIN012 P1.1/AIN113 P1.214 P1.315 P1.416 P1.517 P1.618 P1.719
P3.0/RXD2
P3.1/TXD3
P3.2/INT06
P3.3/INT17
P3.4/T08
P3.5/T19
P3.711
2 4 6 8 10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
1 3 5 7 91
11
31
51
7
19
21
23
25
27
29
31
33
35
37
39
11.059 MHz
22 pF 22 pF
+5V
Figura 3.51 Diagrama esquemático de la interconexión GPS, DSP, MUX y PC

Capítulo 3 - 51
3.11 Desarrollo de software
Una vez que se ha diseñado el hardware del sistema, uno de los primeros dilemas que se
presentan es el de seleccionar el lenguaje de programación, Para el caso del DSP
seleccionado, existen diversas herramientas de programación que involucran un
determinado lenguaje, entre los más comunes tenemos el lenguaje ensamblador y el
lenguaje C, además de otros lenguajes visuales de muy alto nivel que se programan con
bloques gráficos funcionales tales como el simulink de MATLAB, el LabVIEW de
National Instrument y el Code Visual de Texas Instrument.[58]. Ver tabla 3.8
Tabla 3.8 Lenguajes de programación para el TMS320LF2407
Nivel de programación
Bajo Medio Alto
Ensamblador C Simulink MATLAB
C++ LabVIEW
Code Visual
Para la aplicación en medición de líneas de transmisión en tiempo real y en función del
hardware diseñado, cualquiera de los lenguajes de programación antes mencionados
pueden ser utilizados. En cuanto a la memoria de código, como ya se mencionó, se
cuenta con 12Kbytes de memoria, suficiente para albergar el programa desarrollado en
cualquiera de los lenguajes antes mencionados. En cuanto al tiempo de proceso, el
cálculo del fasor de una muestra por segundo, permite un tiempo suficiente para
desarrollar el algoritmo computacional con cualquiera de los lenguajes. La limitante de
hardware más importante es de que el DSP es de punto fijo y por lo tanto, se tiene que
tomar en cuanta esta limitante para el desarrollo del algoritmo computacional.
Como ya se mencionó una de las ideas fundamentales en el desarrollo del algoritmo
computacional para el cálculo del fasor, es la de que se pueda utilizar en aplicaciones de
alta velocidad de cómputo, como es el caso de las protecciones. Por tal motivo, en este
trabajo se tiene la motivación en desarrollar un algoritmo de bajo consumo de tiempo de
procesamiento. Dentro de las herramientas de programación existentes, hay
compiladores en C que optimizan el código, es decir que al compilarlos, el código se
aproxima en tamaño al código generado en lenguaje ensamblador, sin embargo, el
código más reducido, únicamente se puede lograr programando en lenguaje
ensamblador. Por lo tanto el lenguaje seleccionado para esta aplicación fue el lenguaje
ensamblador.
Por otro lado, el algoritmo puede ser utilizado como una simple función desde el
lenguaje de programación en C, en el caso de que en un futuro se quisiera trabajar en C,
y como esta función no depende de ninguna librería en C para funcionar, se logra de

Capítulo 3 - 52
esta manera una optimización de código, espacio de memoria y tiempo de
procesamiento.
3.11.1. Desarrollo del programa [39]
Partiendo del proceso propuesto en la figura 3.44, derivado de la sincronía que se
presenta entre el 1PPS, la señal de 60Hz a digitalizar y la generación de la trama GGA,
se desarrollaron programas de prueba que al integrarlos conforman la estructura general
del programa, Los programas se fueron generando como sigue:
Programas de prueba descritos en el apartado 3.10 Integración de los
subsistemas GPS, DSP y PC.
Programa recursivo que hace una conversión del ADC, se obtiene Vm mediante
la ecuación (3.23), se convierte a decimal y se muestra el resultado en el
HyperTerminal
Programa recursivo que hace una conversión del ADC con un periodo de
muestreo generado por el temporizador, el resultado de Vm se muestra en
decimal en el HyperTerminal
Programa que mediante el flanco de subida del 1PPS conectado a la interrupción
externa XINT1, arranca el temporizador de muestreo y genera el mismo proceso
del punto anterior.
Programa que mediante el punto anterior acumula 16 muestras, calcula el fasor
captura el UTC y muestra el valor del fasor y el UTC en decimal mediante la
Hyperterminal.
Programa que calcula el fasor trifásico de corrientes y voltajes con estampado de
tiempo.
El programa se compone básicamente de tres bloques: El programa principal, la rutina
de servicio de la interrupción externa XINT1 (generada por el 1PPS) y la rutina de
servicio de la interrupción de fin de conversión del ADC.
El programa principal: En el programa principal se prepara y reserva la memoria a
utilizar, se programan y habilitan los periféricos a utilizar: el ADC, el Timer y el SCI.
Se habilitan las interrupciones y se esperan en un ciclo infinito las interrupciones
XINT1 o la de fin de conversión del ADC. En la figura 3.52 se muestra el diagrama de
flujo.
La rutina de servicio de la interrupción IXNT1: En esta rutina lo único que se hace
es arrancar el temporizador que proporciona el periodo de muestreo del ADC. Como
esta interrupción es generada por la señal 1PPS del GPS se presenta cada segundo. En la
figura 3.53 se muestra el diagrama de flujo.

Capítulo 3 - 53
Figura 3.52 Diagrama de flujo del programa principal
Prepara
Inicio
Programa Principal
Habilitar reloj para
SCI.ADC.EVA
Habilita WD sobreflujo=1.1ms
Inicializa tabla de coseno
Habilita interrupción externa con flancos de subida
Habilita SCI 4800 bits/s
1 bit paro, sin paridad, 8 bits
Programa terminales
TX, RX y XINT1
Limpia memoria
Inicializa tabla de seno
Definición del Macro
Limpia WD
Asignación de variables en RAM
Habilita ADC
Inicia Conversión con EVMA (Timer 2)
Asigna interrupción con SEQ1
Asigna mayor prioridad de interrupción.
Habilita GP Timer 2
Asigna Periodo de 960Hz Asigna inicio de conversión al ADC
Habilita interrupciones
globales
Ciclo principal
Limpia WD
Espera interrupción externa (XINT1) o fin de conversión (ADC)
A
A

Capítulo 3 - 54
Figura 3.53 Diagrama de flujo de la rutina de servicio de la interrupción externa XINT1
La rutina de servicio de la interrupción de fin de conversión del ADC: El periodo
de muestro que genera el temporizador en el ADC es de 960 Hz, por lo tanto, esta
interrupción se presenta en 16 ocasiones después de recibido el 1PPS. Aplicando el
algoritmo computacional, cada vez que se genera la interrupción del ADC se hace el
cálculo de nnCosX y se acumula con el mismo producto de todas y cada una de las
muestras, para la primera interrupción en donde n = 1se tiene que:
00CosX = 00SenX = 0 (3.24)
Como el ADC entrega el valor de la conversión de los 6 canales entonces, se pueden
hacer las sumatorias de los productos de cada una de las 6 señales aplicando los
siguientes algoritmos.
nnnn CosXCosX 11Re (3.25)
nnnn SenXSenX 11Im (3.26)
De tal forma que, después de las 16 adquisiciones ya se tienen de las 6 señales las
componentes real e imaginaria expresadas en las ecuaciones (4.11) y (4.12). En la figura
3.54 se muestra la rutina de servicio de la interrupción del ADC
Después de calculadas las componentes reales e imaginarias, se espera mediante poleo
la recepción de datos provenientes del GPS (trama NMEA), se captura el UTC que llega
con el formato HHMMSS.S. Ya capturado el UTC se transmite y se procede al cálculo
del fasor de cada una de las 6 señales mediante las ecuaciones (4.9) y (4.10). Finalmente
se transmiten los fasores calculados y se retorna al programa principal a esperar la
siguiente interrupción del 1PPS. En la figura 3.55 se muestra el diagrama de flujo de la
rutina de detección de la trama NMEA
Interrupción
XINT
Arranca temporizador para período de muestreo
RETORNA
Deshabilita XINT

Capítulo 3 - 55
Figura 3.54 Diagrama de flujo de la rutina de servicio de la interrupción del ADC
Figura 3.55 Diagrama de flujo de la detección de flujo de la trama NMEA
Interrupción
ADC
Contador de muestras
1n
Lee
Sen n y Cos n
Calcula
nSennXnSennX 116,,2,1Im
Calcula
nCosnXnCosnX 116,,2,1Re
n = n+1
No
16n ?
RETORNA
SI
Calcula y transmite
fasores
RETORNA
Espera trama NMEA,
captura y transmite UTC
Prepara
Transmite fin de trama “1AH”
A
A
Trama NMEA
Recibe y transmite UTC HHMMSS.D,
RETORNA
Transmite Inicio de
trama “$”
No
RETORNA
SI
Trama = $GPGGA,
?

Capítulo 4 - 1
Capítulo 4
Pruebas y resultados
4.1 Prueba para la medición del desfase.
Esta prueba consiste en verificar la medición del desfase de acuerdo a lo esperado en la
etapa de diseño. De igual forma que en las pruebas anteriores, las pruebas para medir el
ángulo de desfase se hicieron sin la etapa de sensores y acondicionamiento de señal, lo
anterior se realiza con la finalidad de discriminar posibles desfases introducidos por los
sensores, acondicionadores y filtros, en la figura 4.1 se muestra el diagrama a bloques
del sistema de pruebas. Las pruebas se realizaron como sigue:
Se ajusta con el generador de funciones una señal cosenoidal menor de 3.3 volts
pico-pico de amplitud, con una frecuencia de 60Hz y una componente 1.65 volts
de DC.
La señal generada se hace pasar por una red RC de atraso de fase, para provocar
en la salida de la red un desfase con respecto a la señal de entrada ver figura 4.1.
Se miden las amplitudes y el desfase entre las señales con un osciloscopio.
Se conectan dos sincrofasores sin la etapa de sensores y acondicionamiento, uno
directamente del generador de funciones y otro en la salida de la red de atraso.
Se corre una aplicación de software en la PC que calcule 1 - 2 y se verifica
que ambas mediciones, la del osciloscopio y la mostrada en la PC sean las
mismas.
Hyper-
terminal
Generador de Funciones
Osciloscopio
Red de
atraso
Sincrofasor
2
A D
C
Sincrofasor
1
A D
C

Capítulo 4 - 2
Figura 4.1 Diagrama a bloques del sistema de pruebas del desfase
Red de atraso. La red de atraso se calculó para generar un barrido de atraso de 0° a 30°
para lo cual, se utiliza un potenciómetro para variar el valor de la resistencia del
circuito, ver figura 4.2.
Figura 4.2 Red de atraso
Cálculo de la red de atraso:
Aplicando la ecuación del divisor de voltaje se tiene que:
c
c
ent
sal
jXR
jX
V
V
(4.1)
En forma polar:
R
XXR
X
V
V
cc
c
ent
sal
arctan
90
22
(4.2)
Separando magnitud y fase.
R
XArc ctan90 (4.3)
Calculando para = –30o y proponiendo R = 5K
)5)(9030tan( kX c (4.4)
Calculando C
)25.8660)(60(2
1
C (4.5)
C = 0.306F
Resultado de las pruebas.
Se realizaran diversas mediciones en diferentes ángulos con el osciloscopio, como se
puede observar, en la figura 4.3 el osciloscopio marca una diferencia temporal de 40 s
5 kΩ
330 nF Vsal
Vent

Capítulo 4 - 3
que equivalen a 0.86 grados, mientras que en la computadora el desfase marcado fue de
1 grado
Aplicando el máximo desfase del circuito, se obtiene una diferencia temporal de
1.30 ms lo que equivale a un ángulo de 28.08 grados ver figuras 4.4 y 4.5, para este
desfase el procesador central indicó 28 grados
Figura 4.3 Oscilograma para un desfase de 1° indicado en el procesador central

Capítulo 4 - 4
Figura 4.4 Oscilograma para un máximo desfase de la red de atraso (28.08°).
Figura 4.5 Oscilograma para un desfase de 28° indicados en el procesador central
4.2 Pruebas de desfase de los sensores y acondicionadores
de señal

Capítulo 4 - 5
Los resultados presentados en el apartado anterior, determinan que con una buena
calibración los errores máximos serian los mismos que se presentaron en el capitulo 2
pruebas del algoritmo. En cuanto a la calibración en amplitud, las pruebas hechas hasta
el momento indican que con potenciómetros de varias vueltas con ajuste mediante un
pequeño tornillo (presets) se minimizan los errores. Sin embargo hasta el momento no
se ha descrito cual seria el error en la medición del ángulo introducido por los sensores
y acondicionadores de señal. En la primer prueba se verifica que no haya desfases entre
los TP conectados a una misma fase. Se midió con un osciloscopio la combinación de
dos en dos de los tres sensores con acondicionamiento y se encontró que no hay
desfases entre ellos. En la figura 4.6 se muestra el diagrama a bloques de la prueba y en
la figura 4.7 se muestra la medición entre TP1 y TP2, siendo la misma gráfica para las
otras dos combinaciones.
Las mismas pruebas se hicieron para los dos TC, el diagrama a bloques de la prueba se
muestra en la figura 4.8 y el oscilograma se muestra en la figura 4.9. Como se puede
observar, tampoco hay desfase entre los sensores.
Figura 4.6 Diagrama del circuito de prueba de los TP´s
Osciloscopio
Acondicionador
de
señal
TP1
Acondicionador
de
señal
TP2
Acondicionador
de señal
TP3

Capítulo 4 - 6
Figura 4.7 Comparativo entre las señales de dos TP´s
Acondicionador de
señal TC1
Acondicionador de
señal TC2
Acondicionador de
señal TC3
A
CARGA
Osciloscopio

Capítulo 4 - 7
Figura 4.8 Diagrama del circuito de prueba de los TC’s
Figura 4.9 Comparativo entre las señales dos TC´s
Pruebas de desfase entre TP´s y TC´s. Utilizando una carga puramente resistiva para
evitar desfases entre la señal de voltaje y de corriente, se implementó el circuito de
pruebas cuyo diagrama a bloque se muestra en la figura 4.10. Si se consideran las
señales de voltaje como referencia, en este caso se observa en la figura 4.11 del
oscilograma obtenido, que las señales de corriente se atrasan 24 grados a las señales de
voltaje.
TP
Acondicionador de
señal TC
A
CARGA
Osciloscopio
Acondicionador
de señal

Capítulo 4 - 8
Figura 4.10 Diagrama del circuito de prueba de un TP y un TC
Figura 4.11 Comparativo entre las señales de un TP y un TC
Para el caso de la medición de parámetros (por ejemplo potencias) que utilizan el
desfase entre el voltaje y la corriente de una misma fase, se deberá tomar encuesta para
los cálculos el desfase de 24 grados que se presenta entre los TP´s y los TC´s y sus
circuitos acondicionadores.
4.3 Pruebas del sistema conectado a una línea de
transmisión a escala de 120 volts.
En esta parte se deberá demostrar que el prototipo cumple con las especificaciones
señaladas, aprobando las pruebas a superar que se definieron en el apartado de
especificaciones generales (apartado 3.5). Con las pruebas de campo y de laboratorio se
obtendrán las especificaciones finales.
En la parte de implementación (figura 4.8) se generaron pruebas para un solo
sincrofasor conectado a una fuente de 120 volts. Antes de conectar dos sincrofasores en
los extremos de una la línea de transmisión a escala, se procede a realizar algunas
pruebas muy sencillas pero significativas, que aseguran en una primera instancia que el
sistema de dos sincrofasores se encuentra funcionando. En una primer prueba, se
conectan los dos sincrofasores a una fase de la línea de 120 volts, haciendo
corresponder la fase de ambos sincrofasores con la fase de la línea y ambos neutros del
sincrofasor con el neutro de la línea ver figura 4.12. El resultado obtenido, como es de

Capítulo 4 - 9
esperarse fue de de un par de fasores con un desfase de 0°. En una segunda prueba, se
conectan ambos sincrofasores a la misma fase de 120 volts, pero con un sincrofasor
conectado en forma invertida, ver figura 4.13. El resultado tal cono fue de esperarse fue
un par de fasores con un desfase de 180 grados.
Figura 4.12 Prueba de los sincrofasores conectados una misma fase
Figura 4.13 Prueba de los sincrofasores conectados una misma fase, con una conexión
invertida
Conexión con la línea de transmisión a escala de 120 volts.
En la figura 4.14 se muestra el circuito equivalente de una porción o bloque de la línea
de transmisión a escala. La línea se puede configurar con uno o varios bloques en serie.
Como se puede observar, las tres fases cuentan con los mismos parámetros. Para tener
una idea aproximada de lo que registrará el sistema de medición se hace una simulación
L
Sincrofasor 1
Sincrofasor 2
N
L1 N L1 N
L
Sincrofasor 1
Sincrofasor 2
N
L1 N L1 N

Capítulo 4 - 10
del desfase esperado en una de las fases. En la figura 4.15 se muestra la forma en como
se conectan los sincrofasores a la línea de transmisión. La simulación del
comportamiento de la línea de transmisión se realizó con el analizador de circuitos
TINA [64].
Figura 4.14 Línea de transmisión a escala de 120 volts
L1
L2
L3
N
3x 1uF
0.5 uF
0.5 uF
0.5 uF
290 mH
290 mH
290 mH
250 mH
13
13
13
11
3x 1uF
0.5 uF 0.5 uF
0.5 uF

Capítulo 4 - 11
Figura 4.15 Conexión de los sincrofasores con la línea de transmisión a escala
Análisis de la línea de transmisión.
Con los parámetros de dos bloques conectados en serie como el descrito en la figura
4.14 para la línea de transmisión de una fase y con una carga puramente resistiva de 40
Ea’
Eb’
Ec’
Ia’
Ib’
Ic’
Carga
Ea
Eb
Ec
Ia
Ib
Ic
Línea
N L3 L2 L1

Capítulo 4 - 12
ohms, se procede a hacer el análisis de una fase del circuito de la figura 4.15. En la
figura 4.16 se muestra el diagrama en el analizador TINA con los dos bloques de la
línea de transmisión. En donde el voltaje de entrada es de 130 volts pico, que fue el que
se midió en la línea de transmisión a escala.
Figura 4.16 Conexión de los sincrofasores con la línea de transmisión a escala
Como resultado de la simulación se obtuvieron los fasores Vin y Vout, Iin e Iout. En las
figuras de la 4.17 a la 4.20 se muestran respectivamente los desfases entre Iin e Iout,
Vin y Vout, Vin e Iin y el desfase entre Vout, e Iout que determinan las potencias y los
parámetros de la línea.

Capítulo 4 - 13
T
Parte real
-100.00m 0.00 100.00m 200.00m 300.00m 400.00m
Pa
rte
im
ag
ina
ria
-300.00m
-150.00m
0.00
150.00m
300.00m
7.04
Iout = 338.64mA 10.33
Iin = 240.16mA 17.37
Figura 4.17 Corriente de entrada vs corriente de salida

Capítulo 4 - 14
Figura 4.18 Voltaje de entrada vs voltaje de salida

Capítulo 4 - 15
Figura 4.19 Voltaje de salida vs corriente de salida

Capítulo 4 - 16

Capítulo 4 - 17
Figura 4.20 Voltaje de entrada vs corriente de entrada
Haciendo las mediciones con el sistema de sincrofasores en una sola fase de dos
porciones de línea se generaron los resultados siguientes.
= 70°
out = 180°
in = 100°
Como se mencionó al inicio de esta prueba, se hizo el análisis de la red con la finalidad
de tener una idea aproximada de los resultados a obtener. A pesar de que se presentan
diferencias al comparar los resultados del análisis con los medidos directamente en la
línea se observa que en todas las comparaciones existe cierta relación, por ejemplo, en
los desfases entre Vin y Vout, o Vin e Iin, los ordenes de magnitud de las diferencias
son semejantes. Considerando que los valores de los parámetros marcados en la línea de
transmisión a escala tiene cierta tolerancia, entonces se da por válida la prueba ya que la
exactitud del sistema también está corroborada en las pruebas pasadas y en el análisis
comparativo con equipos comerciales que se hace a continuación.

Capítulo 4 - 18
4.4 Análisis comparativo con equipos comerciales
En [65] se reportan los resultados de una prueba comparativa realizada a 4 sincrofasores
comerciales. Se toman los resultados del error en magnitud, el error en fase y se
comparan con los errores obtenidos en las pruebas hechas al equipo aquí presentado. En
la figura 4.21 se muestran los resultados de las pruebas de amplitud hechas en [65]. Los
sincrofasores A, B y C, en el rango de operación del 80% al 120%, presentan un error
de entre el 0.02% y el 0.08%. En el mismo rango, el error promedio del sincrofasor aquí
presentado es del 0.024%, ver figura 4.22
Para la detección del error de fase en [65] se utilizó un generador de funciones y un
osciloscopio. En la figura 4.23 se muestra la sincronización entre 1PPS y la señal de
voltaje realizada en [65]. Variando el generador de funciones de una frecuencia de
60.0000hz a 60001, el 1PPS y la señal se desplazan ligeramente. En la figura 4.24 se
muestran los resultados de la medición realizada en el sincrofasor aquí presentado.
Debido al LUT los errores se presentan en las cercanías de los 90 grados, este error, se
puede minimizar aumentando el tamaño de la tabla. El error promedio en todo el rango
de medición es del 0.14% que es apropiado para aplicaciones de medición de líneas de
transmisión.
Figura 4.21 Error en magnitud para una línea trifásica balanceada a frecuencia nominal
(figura tomada de [65]).

Capítulo 4 - 19
0
0.01
0.02
0.03
0.04
0.05
0 20 40 60 80 100 120 140
Voltage %
Err
or
%
Fig. 4.22. Error de magnitud
Figura 4.23 Sincronización entre la señal de 1 PPS y la señal eléctrica
(figura tomada de [65])
0
1
2
3
75 80 85 90 95 100
Degrees
Err
or
%
Figura 4.24 Error de ángulo

Capítulo 5 - 1
Conclusiones
Partiendo de los resultados obtenidos en las pruebas y de los comparativos con otros
equipos comerciales, se concluye que los procedimientos de diseño e implementación
presentados son validos, se concluye también que durante el desarrollo tecnológico se
genera conocimiento, que como en este caso se generó un algoritmo computacional para
el cálculo de la DFT en cuatro instrucciones de DSP y un algoritmo para la detección de
fallas de sobrecorriente.
La utilización de los look up tables permite realizar la medición fasorial de una señal de
60 Hz utilizando Microcontroladores o DSP-Microcontroladores de punto fijo.
El tiempo de procesamiento se reduce considerablemente al eliminar series de potencias
en el cálculo de funciones trigonométricas.
Dependiendo de la resolución que se desee el tamaño de las tablas se pueden aumentar.
Para las aplicaciones del sincrofasor en donde se requiera una resolución en el ángulo de
un grado o menos la tabla de 8 bits (256 pasos) es suficiente.
El algoritmo esta diseñado para calcular el fasor considerando una frecuencia nominal
de 60 Hz estable, es decir que si la frecuencia cambia de 60 Hrz. Se generara un error en
el cálculo del fasor. Si se considera que la variación de la frecuencia afecta de la misma
forma a dos o más UMP, entonces el error se anula entre ellos, además de que la
frecuencia varia muy poco, el método de la DFT es inmune a harmónicos múltiplos de
60Hz.
Con el algoritmo para relevadores de sobrecorriente instantáneos basado en la variación
del ángulo del fasor de corriente. Es posible detectar una falla eléctrica midiendo la
diferencia de los ángulos de fase entre la señal de falla y la señal normal (la misma señal
de corriente un periodo antes). En la medida que se tengan más muestras por periodo y
algoritmos de cómputo que calculen en línea el fasor entre muestra y muestra, se tendrá
la posibilidad de poder detectar las fallas desde sus facetas tempranas (antes de un
cuarto del periodo).
Actualmente los sincrofasores se encuentran instalados en líneas de transmisión, sin
embargo, según CFE también son requeridos en las áreas de distribución, esto implica
un gran gasto en medidores. El desarrollo aquí presentado permite un abatimiento de
hasta el 80% del costo de los medidores comerciales. El bajo costo del desarrollo aquí
presentado radica precisamente en que la mayoría de los sistemas requeridos en el
funcionamiento de un sincrofasor se encuentran junto con el procesador central
embebidos en una sola pastilla de circuito integrado. El reducido tamaño de la tarjeta
del circuito impreso (PCB) y el uso de un procesador de punto fijo también son factores
en el bajo costo del instrumento.

Capítulo 5 - 2
Recomendaciones futuras y aportaciones adicionales.
1. Partiendo de este desarrollo, se pueden diseñar otros productos para aplicaciones
similares tales como:
Calidad de la energía
Sistema de adquisición de datos para estudios de ahorro y calidad de la
energía
Relevadores de protección
Flujos de potencia
Control de FACTS
2. Se abre la posibilidad de continuar con líneas de investigación propias en el área de:
Desarrollo de algoritmos fuera de frecuencia nominal (55-65 Hz).
Desarrollo de algoritmos que permita suplir el 1PPS y el UTC en un
momento de pérdida satelital.
Desarrollo de algoritmos matemáticos y computacionales diferentes a la
DFT.
Desarrollo de un receptor GPS mediante circuitos integrados
3. Se ha utilizado la información generada en este desarrollo, en la reproducción de la
misma aplicación con diferentes procesadores. Actualmente se está desarrollando una
tesis de maestría utilizando uno de los más recientes y ventajosos Controladores de
Señales Digitales.
4. El software de soporte del dispositivo DSP, permite programarlo con diferentes
lenguajes, de alto nivel como C y Matlab, logrando de esta manera un ensayo real y en
campo de los algoritmos y por lo tanto una verificación del funcionamiento más
confiables que las simulaciones computacionales.
5. Este desarrollo está pensada para uso industrial y científico-tecnológico es decir que
aparte de poderse utilizar en aplicaciones reales de campo, se puede utilizar en un
laboratorio para ensayar diferentes algoritmos de medición y protección, en su forma
más completa se puede configurar como un medidor con telemetría y relevador de
protección.
6. Uno de los objetivos del programa doctoral es el de darle un impulso al desarrollo
tecnológico del país. Aparte de la posibilidad de comercialización del sincrofasor aquí
presentado. Se ha contribuido con el desarrollo tecnológico mundial, a través del
"eXpressDSP™-Compliant Third-Party Algorithms". Dentro del programa de terceras
partes de la compañía Texas Instruments y por medio de la compañia Mexicana
RACOM microelectronics. Obteniéndose los siguientes resultados.
Presentación en el programa de terceras partes de Texas Instruments del
algoritmo XDAIS Medición de RMS.

Capítulo 5 - 3
RACOM microelectronics es la primera y única empresa Latino Americana
aceptada y reconocida mundialmente por TI como una aliada en el desarrollo
tecnológico con DSP.

R - 1
Referencias
1. Phadke, A. G.; Thorp, J. S.; Adamiak, M. G. A new measurement technique
for tracking voltage phasors, local system frequency, and rate of change
frequency. IEEE Transactions on Power Apparatus and Systems, Vol. PAS-
102, No. 5, May 1983
2. Phadke, A. G. Synchronized phasor measurements, Chapter 6. IEEE
Tutorial Course, Advancements in microprocessor based protection and
communication.1997
3. Phadke, A.G. Synchronized phasor measurements-a historical overview.
Transmission and Distribution Conference and Exhibition 2002: Asia Pacific.
IEEE/PES , Volume: 1 6-10 Oct. 2002
Pages:476 - 479 vol.1
4. Jodice, J. A.; Ryan, R.; Carr, K. Satellite synchronized test instruments
replace the staged fault as the ultimate test of protection system
performance. Double Engineering Company.
5. Moore, T. An introduction to the global positioning system and its
applications. Developments in the Use of Global Positioning Systems , the
Institution of Electrical Engineers. Savoy Place. London, UK 8 Feb 1994
Pages:1/1 - 1/6
6. Cory, B.J.; Gale, P. Applications of precise time in electrical transmission
and distribution systems. Precise Time and Frequency - the Beat of a Single
Drum, IEE Colloquium on , 11 Nov 1992
Pages:8/1 - 8/3
7. Kumar, A. GPS and communications for precision power engineering.
Power Quality '98 , 1998
Pages:285
8. Phadke, A.G.; Pickett, B.; Adamiak, M.; Begovic, M.; Benmouyal, G.; Burnett,
R.O., Jr.; Cease, T.W.; Goossens, J.; Hansen, D.J.; Kezunovic, M.; Mankoff,
L.L.; McLaren, P.G.; Michel, G.; Murphy, R.J.; Nordstrom, J.; Sachdev, M.S.;
Smith, H.S.; Thorp, J.S.; Trotignon, M.; Wang, T.C.; Xavier, M.A.
Synchronized sampling and phasor measurements for relaying and
control. Power Delivery, IEEE Transactions on , Volume: 9 , Issue: 1 , Jan.

R - 2
1994
Pages:442 - 452
9. Phadke, A.G. Synchronized phasor measurements in power systems.
Computer Applications in Power, IEEE , Volume: 6 , Issue: 2 , April 1993
Pages:10 – 15
10. Cory, B.J.; Gale, P.F. Satellites for power system applications. Power
Engineering Journal [see also Power Engineer] , Volume: 7 , Issue: 5 , Oct.
1993
Pages:201 – 207
11. Wilson, R.E. PMUs [phasor measurement unit]. Potentials, IEEE , Volume:
13 , Issue: 2 , April 1994
Pages:26 – 28
12. Phadke, A. G. Recent advances in monitoring, protection and control of
power systems. Virginia Tech.
13. Burnett, R.O., Jr.; Butts, M.M.; Cease, T.W.; Centeno, V.; Michel, G.;
Murphy, R.J.; Phadke, A.G. Synchronized phasor measurements of a
power system event. Power Systems, IEEE Transactions on , Volume: 9
, Issue: 3 Aug. 1994
Pages:1643 – 1650
14. Phadke, A. G.; Martin, K. IEEE standard for synchrophasors for power
systems. IEEE Std 1344-1995(R2001) , 2001
15. Martin, K. E.; Benmouyal G.; Adamiak, M. G.; Begovic, M.; Burnett, R.O.,
Jr.; Carr, K. R.; Cobb, A. Kusters, J. A.; Horowitz, S. H.; Jensen, G. R.;
Michel, G. L.; Murphy, R.J.; Phadke, A. G..; Sachdev, M.S.; Thorp, J.S. IEEE
standard for synchrophasors for power systems. IEEE Transactions on
Power Delivery, Vol. 13, No. 1, January 1998
16. Fardanesh, B.; Zelingher, S.; Sakis Meliopoulos, A.P.; Cokkinides, G.;
Ingleson, J. Multifunctional synchronized measurement network [power
systems]. Computer Applications in Power, IEEE , Volume: 11 , Issue: 1 , Jan. 1998
Pages:26 – 30
17. Ching-Shan Chen; Chih-Wen Liu; Joe-Air Jiang. A new adaptive PMU
based protection scheme for transposed/untransposed parallel
transmission lines. Power Delivery, IEEE Transactions on , Volume: 17
, Issue: 2 , April 2002
Pages:395 – 404

R - 3
18. Yunping Chen; Chengxue Zhang; Zhijian Hu; Xurui Wang. A new approach
to real time measurement of power angles of generators at different
locations for stability control. Power Engineering Society Winter Meeting,
2000. IEEE , Volume: 2 , 23-27 Jan. 2000
Pages:1237 - 1242 vol.2
19. AMETEK, Inc. TR-2000 Multi-Function Recorder ©2002.
20. Benmouyal, E.O.; Schweitzer; Guzmán A. Synchronized phasor
measurement in protective relays for protection, control, and analysis of
electric power systems. Schweitzer Engineering Laboratories, Inc., 22-24,
October 2002
21. Moxley, Roy; Woodward Darold. Improving power system operating
capacity through wide-area synchronous phase angle measurement.
Schweitzer Engineering Laboratories, Inc., 2002
22. Moxley, Roy; Petras, Chuck; Anderson, Chris; Fodero, Ken II. Display and
analysis of transcontinental synchrophasors. Schweitzer Engineering
Laboratories, Inc., 2002
23. Phadke, A. G.; Thorp, J. S. Synchronized Phasor Measurements and Their
Applications. Springer, New York, January 2008.
24. Anderson, Chris; Fearn, Brian; Guzmán, Armando; Moxley, Roy. Using SEL-
421 relay synchrophasors in basic applications. SEL Application Guide,
Vol. 1
25. Arbiter Systems. Model 1133A power sentinel functional description.
26. Real Academia Española. DICCIONARIO DE LA LENGUA ESPAÑOLA
Vigésima segunda edición 2001 www.rae.es
27. Johnsonbaugh, R; Schaefer,M. Algorithms, chapter 1. Prentice Hall, New
Jersey 2004
28. Brassard, P;Bratley, G. Algorithms, chapter 1. Prentice Hall, New Jersey
1988
29. Baeza Yates, R. Algoritmia. Dpto. de Cs. de la Computación, Univ. de Chile,
www.baeza.cl
30. Organisation for Economic Co-operation and Development La definición de
"know-how", recopilado por Rafael San Vicente Cisneros. No publicado y
extraido de www.oecd.org/home/
31. Consejo Nacional de Ciencia y Tecnología (CONACYT) Informe 2001-2003
y Perpectivas para 2004 México, D. F.© 2004.

R - 4
32. Sociedad Mexicana para el Progreso de la Ciencia y la Tecnología, A.C Por
una política nacional de ciencia y tecnología en el contexto global. Mexico,
D.F. Diciembre 2005
33. Sidhu, T.S.; Sachdev, M.S. An iterative DSP technique for tracking power
system frequency and voltage phasors. Electrical and Computer
Engineering, 1996. Canadian Conference on , Volume: 1 , 26-29 May 1996
Pages:115 - 118 vol.1
34. Jun-Zhe Yang; Chih-Wen Liu. A smart method makes DFT more precise
for power system frequency estimation. Power Engineering Society 1999
Winter Meeting, IEEE , Volume: 2 , 31 Jan-4 Feb 1999
Pages:909 - 913 vol.2
35. Funaki, T.; Tanaka, S. Error estimation and correction of DFT in
synchronized phasor measurement. Transmission and Distribution
Conference and Exhibition 2002: Asia Pacific. IEEE/PES , Volume: 1 , 6-10
Oct. 2002
Pages:448 - 453 vol.1
36. De La O, J.A. New theory for phasor measurement. Instrumentation and
Measurement Technology Conference, 2002. IMTC/2002. Proceedings of the
19th IEEE , Volume: 2 , 21-23 May 2002
Pages:1405 - 1410 vol.2
37. Electric Power Research Institute, IECASA Team Intelligrid uses case
SynchroPhasor Domain Description Intelligrid Architecture Volume II. Palo
Alto, California 94304 USA. 2004
38. Rafael San Vicente, Raúl Cortés, Jaime Robles, J. Enrique Chong-Quero,
DSP-Microcontroller Implementations of a Simplified Algorithm for
Synchrophasor Calculation. IEEE 2nd International Conference on
Electrical and Electronics Engineering and XI conference on Electrical
Engineering (ICEEE-CIE 2005).
39. A. R. San Vicente Cisneros, R. A. Cortés Mateos, J. Robles García, J. E.
Chong Quero, Construcción de un sincrofasor de bajo costo basado en un
DSP-Controlador. Third LACCEI International Latin American and
Caribbean Conference for Engineering and Technology
(LACCET‟2005)“Advances in Engineering and Technology:A Global
Perspective”, 8-10 June 2005, Cartagena de Indias, Colombia
40. Eduardo Cesar Senger, Giovanni Manassero, Jr., Clovis Goldemberg, and
Eduardo Lorenzetti Pellini Automated Fault Location System for Primary
Distribution Networks

R - 5
41. Schweitzer Engineering Laboratories SEL-311A Data Sheet, Inc. Event
Reporting and Sequential Events Recorder (SER).
42. T.S. Sidhu, X. Zhang, F. Albasri and M.S. Sachdev Discrete-Fourier-
transform-based technique for removal of decaying DC offset from
phasor estimates TEE hoc.-Gner, Tw" Dlrrr&.. Vol. 150, No. 6, Nowdm
2003
43. M.S. Sachdev' T.S. Sidhu' I. Uttamchandani' W.O. Kennedy Design of Phase
and Amplitude Comparators for Transmission Line Protection. 1991
Conference on Communications. Power and Computing WESCANEX'97
Proceedings; Winnipeg, MB; May 22-23, 1997; pp. 179-184
44. Armando Guzman, Satish Samineni, and Mike Bryson. Protective Relay
Synchrophasor Measurements during Fault Conditions. Schweitzer
Engineering Laboratories, Inc. Copyright © SEL 2005 (All rights reserved)
20050920 TP6214-01
45. Madisetti, V., and Williams, D. B. ‘The Digital Signal Processing
Handbook„ CRC Press, B m Raton, FL, 1997
46. Youheng Xu, and Baoping Ju Synchronized phasor measuring method
using recursive DFT with a window function 2005 IEEE/PES transmission
and Distribution Conference & Exhibition: Asia and Pacific Dalian, China.
47. Zhian Zhong, Chunchun Xu, Bruce J. Billian, Li Zhang, Shu-Jen Steven Tsai,
Richard W. Conners, Virgilio A. Centeno, Arun G. Phadke, and Yilu Liu,
Power System Frequency Monitoring. Network (FNET) Implementation
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 20, NO. 4,
NOVEMBER 2005
48. Trimble Navigation Limited. ACE III GPS™ System Designer Reference
Manual. Sunnyvale, CA 2000.
49. Glover,J.D; Sarma,M. Sistemas de Potencia (capitulo 5). Tercera edición.
Thomson, México, D.F.© 2004.
50. Glover,J.D; Sarma,M. Demostración de las ecuaciones que representan el
modelo de una línea de transmisión. Presentada por Rafael San Vicente
Cisneros. No publicado y extraído de Glover,J.D; Sarma,M. Sistemas de
Potencia (capitulo 5). Tercera edición. Thomson, México, D.F.© 2004.
51. R. Cortés; D. Libreros; R. San Vicente Medición de RMS Mediante DSP
Tms320c240 Cuarto Congreso Nacional de Ingeniería Electromecánica y
de Sistemas. Centro Histórico de la ciudad de México, trabajo publicado
1998.

R - 6
52. R. Cortés; D. Libreros; R. San Vicente; E. Osorno. Medición de la
Frecuencia a Partir de las Componentes Simétricas Duodécima Reunión
de Verano de Potencia IEEE Acapulco Guerrero, México. trabajo publicado
1999.
53. IEEE Std. 519 1992 IEEE Recommended Practice and Requiriments for
Harmonic Control in Electrical Power Systems 1992.
54. BERKELEY DESIGN TECHNOLOGY, INC. POCKET GUIDE TO
POPULAR DSP PROCESSORS AND CORES. 2107 Dwight Way, 2nd
Floor, Berkeley CA 94704 Revised 2/1/2001 Copyright
55. Texas Instrument C2000 Platform. http://www.go-
dsp.com/fet/c2000/index.html
56. Texas Instrument. TMS320LF/LC240xA DSP Controllers Reference Guide
System and Peripherals. Dallas, Texas 75265. Revised December 2002
57. Texas Instrument. TMS320C24x DSP Controllers Reference Guide: CPU
and Instruction Set. Dallas, Texas 75265. Revised December 2002
58. Texas Instrument DSP Developers´Village http://dspvillage.ti.com/
59. Spectrum Digital, Inc. eZdspTM
LF2407 Technical Reference. 12502
Exchange Dr., Suite 440 Stafford, TX. 77477 August 2001
60. GPS World. GPS World 2005 Buyers Guide.
http://www.gpsworld.com/gpsworld/ JUNE 2005
61. Trimble. GPS Boards & Chipsets Home, Embedded: Portable Devices
http://www.trimble.com/
62. Atmel Corporation. AT89C2051, 8 bits microcontroller. 2325 Orchard
Parkway San Jose, CA 95131 2000.
63. Maxim Integrated Products, +5V-Powered, Multichannel RS-232
Drivers/Receivers 120 San Gabriel Drive, Sunnyvale, CA 94086 (408) 737-
7600 2003
64. DesignSoft, TINA PRO, El laboratorio completo para Windows
Iniciación Rápida. Budapest, Hungría 1998.
65. Depablos, J.; Centeno, V.; Phadke, A.G.; Ingram, M.; Comparative testing
of synchronized phasor measurement units. Power Engineering Society
General Meeting, 2004. IEEE 6-10 June 2004 Page(s):948 - 954 Vol.1
66. McClellan, James H; Schafer, Ronald W; Yoder, Mark A. Signal processing
first. Upper Saddle River, NJ : Pearson, 2003.

R - 7
67. Oppenheim, Alan V. Discrete-Time Signal Processing. Prentice-Hall, Inc.
New Jersey 1999.
68. Robinson citado por Garnica y otros en Tecnología: Un Instrumento Para
La Competitividad. Dos Casos de Transferencia de Tecnología. Revista
LAGOVEN. Venezuela. 1996.
69. San Vicente, R.; Cortés, R.; Robles, J.; Chong-Quero, Synchrophasor Design
Based on a DSP-Microcontroller. J.E IEEE International Symposium on
Intelligent Signal Processing (WISP‟2005).
70. San Vicente, R.; Cortes, R.; Robles, J.; Chong-Quero, J.E. Algorithm for
instant overcurrent relays based on the angle variations of current phasor Industrial Technology, 2008. ICIT 2008. IEEE International Conference on
21-24 April 2008 Page(s):1 – 4

Apéndice A1 - 1
A1
Análisis de la señal
A.1.1 Análisis teórico.
En este apéndice se presenta la demostración de las ecuaciones matemáticas que
permiten en un sistema eléctrico de potencia calcular la amplitud y la fase de la señal
fundamental de 60Hz ( 0f ) y de las armónicas que pudiera contener.
Planteamiento del problema:
Dado un conjunto de n muestras X[1], X[2],…, X[n] obtenidas de una señal con
armónicos X (t) , se desea conocer para ciertas frecuencias de la señal 0f , 2 0f , 3 0f ,
…,k 0f las amplitudes 1A , 2A , 3A , …, Ak y las fases 1 , 2 , 3 ,…, k de las señales
que componen a X(t). Es decir que se tienen como datos las muestras de la señal y las
frecuencias de las armónicas en donde se desea calcular la amplitud y la fase (fasor).
Para una mayor claridad y simplicidad en las gráficas se presenta un ejemplo en donde
el análisis se hace con una señal de 60Hz y una armónica. En la figura A1.1 se muestra
gráficamente como la señal X (t) se genera a partir de la suma de la señal fundamental
)602cos(0.1)(1 ttX
y la 3er armónica (3 0f )
)4/1802cos(8.0)(3 ttX
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
tiempo
Am
pli
tud
X1(t) X3(t) X(t) = X1(t) + X3(t)
Figura A1.1 Composición de una señal con armónicas

Apéndice A1 - 2
Como el número de señales que componen a )(tX es finito, son sinusoidales y sus
frecuencias están limitadas a un “acho de banda” entonces:
L
k
k tXtX0
)()( (A1.1)
Las señales )(tX k son sinusoidales, por lo tanto, se pueden escribir como funciones
seno o coseno. Por razones de simplicidad al trasformar a la forma exponencial
compleja (como se explica más adelante) se utilizara la función coseno para representar
las )(tX k . En forma genérica, la señal )(tX pudiera contener una componente de
corriente directa (DC) que en la ecuación (A1.1) se representa por la componente de
frecuencia cero )(0 tX . Tomando en cuenta las anteriores consideraciones, la ecuación
(A1.1) se escribe como sigue.
)2cos()(1
L
k
kkko tfAAtX (A1.2)
En donde:
L = número finito de señales sinusoidales que conforman la señal X(t)
oA = componente de DC.
Si las frecuencias de las señales que componen a X(t) son múltiplos k (armónicas) de la
señal de frecuencia más baja denominada frecuencia fundamental ( 0f ) y que oA = 0
tenemos que (A1.2) se escribe:
)2cos()(1
0
L
k
kk tkfAtX (A1.3)
En la ecuación (A1.3) ya se aprecian los datos y las incógnitas que se involucran en el
problema. Se conocen la señal medida )(tX y la frecuencia k 0f de la señal o armónica
a la cual se le desea conocer la amplitud. kA y el ángulo de fase k que son las
incógnitas.
Para facilitar la manipulación algebraica y poder despejar las incógnitas, se transforma
la funcione a la forma exponencial compleja. Utilizando la fórmula inversa de Euler
(ver apéndice A.1.4) [32,33]
2cos
jj ee
se tiene que
L
k
jj
k eeAtX1
)(2
1)(
(A1.4)
en donde

Apéndice A1 - 3
)2( 0 ktkf
Interpretación de la ecuación (A1.4)
El término )( jj ee representa la suma de dos fasores rotatorios, uno con frecuencia
positiva 0kf y otro con frecuencia negativa 0kf (ver apéndice A.1.6) [32,33].
Como je representa la misma señal que je pero con frecuencia negativa, la ecuación
(A1.4) se puede rescribir como:
L
k
j
keAtX12
1)(
(A1.5)
o como
L
k
j
keAtX12
1)(
(A1.5.1)
Cambiando por )2( 0 ktkf y sustituyendo en (A1.5)
L
k
tkfjj
k
L
k
tkfj
k eeAeAtX kk
1
)2(
1
)2( 00
2
1
2
1)(
para separar de la ecuación las incógnitas kA y k se hace
kj
kkk eAAaa
2
1),( (A1.6)
entonces
L
k
tkfj
keatX1
)2( 0)(
(A1.7)
Como la componente de DC = 0; entonces en la ecuación (A1.1) )(0 tX = 0. Con la
consideración anterior e igualando la ecuación (A1.1) con la ecuación (A1.7)
1
)()(k
k tXtX
1
)2( 0
k
tkfj
kea
(A1.8)
Desarrollando ambos miembros de la ecuación
)(1 tX + )(2 tX + … + )(tX k = )12(
10tfj
ea
+)22(
20tfj
ea
+…+)2( 0tkfj
kea
igualando termino a termino se tiene el conjunto de ecuaciones

Apéndice A1 - 4
)(1 tX = )12(
10tfj
ea
)(2 tX = )22(
20tfj
ea
)(tX k = )2( 0tkfj
k ea
(A1.9)
En donde ),( Aak es el fasor incógnita.
El conjunto anterior de ecuaciones indican que cada una de las señales (vectores) que
componen la señale )(tX se pueden analizar de manera independiente.
Despejando ),( Aak de la ecuación (A1.9) se tiene que
),( Aak = )(tX k
)2( 0tkfje
(A1.10)
Como se puede observar la ecuación (A1.10) ya representa los k fasores de las k
señales. En este momento se hace un paréntesis para analizar las ecuaciones, para tal
efecto, se procede a graficar la ecuación (A1.10) para tener una mejor visión de los
resultados obtenidos.
Haciendo k = 1 para analizar el fasor de la señal fundamental (60Hz) y aplicando la
formula de Euler (ver apéndice A.1.4) [32,33].
tjsenttXAa 602)602cos()(),( (A1.10.1)
Haciendo un cambio de variable (ver apéndice A.1.5) [32,33]
ir jZZAa ),( (A1.10.2)
Si se desarrolla de la misma forma la ecuación (A1.5.1) entonces.
ir jZZAa ),( (A1.10.3)
Aplicando identidades trigonométricas y el teorema de Pitágoras (ver apéndice A.1.5)
[32,33] se tiene que
22
ir ZZA (A1.10.4)
r
i
Z
Zarctan (A1.10.5)
Graficando A vs. En las ecuaciones (A1.10.2) y (A1.10.3)

Apéndice A1 - 5
a = Zr + Zi
0
0.2
0.4
0.6
0.8
1
1.2
0 45 90 -45 0 45 90 -45 0 45 90 -45 0 45 90
Ángulo
Am
plit
ud
a)
a = Zr - Zi
0
0.2
0.4
0.6
0.8
1
1.2
0 -45 -90 45 0 -45 -90 45 0 -45 -90 45 0 -45 -90
Ángulo
Am
plit
u
b)
Figura A1.2 Gráficas de A vs.
Procedimiento de graficación:
Las gráficas se generaron en Excel. Se tabuló contra el tiempo de manera independiente
la parte real y la imaginaria de la ecuación (A1.10.1); para cada complejo generado de
la tabulación anterior, se aplicaron (A1.10.4) y (A1.10.5) obteniéndose de esta manera
A y de cada complejo, que al graficarlos, generan las gráficas a) y b) para las
ecuaciones (A1.10.3) y (A1.10.2) respectivamente.
Observación:
Las ecuaciones (A1.10.2) y (A1.10.3) en ambos casos, determinan el valor instantánea
del valor absoluto de la amplitud, sin embargo en la gráfica de la figura A1.2 a) de la
ecuación (A1.10.3), el ángulo varia en forma ascendente de derecha a izquierda,
mientras que en la gráfica de la figura A1.2 b) de la ecuación (A1.10.2) el ángulo varia
de derecha a izquierda en forma descendente. Esta prueba nos permite comprobar que se

Apéndice A1 - 6
trata de la misma señal pero con frecuencia opuesta. En la figura A1.3 se muestra la
gráfica polar de las ecuaciones (A1.10.2) y (A1.10.3).
Figura A1.3 gráfica polar de las ecuaciones (A1.10.2) y (A1.10.3)
Recordando el planteamiento del problema que ha dado origen a este análisis, de la
función X (t) se tiene un conjunto de n muestras X[1], X[2],…, X[n] , para cada t
discreto de 1,2,…,n se tiene que la ecuación (A1.10) queda.
),( Aak )
2(
0][ T
njk
k enX
(A1.11)
En donde 0
01
Tf
El valor promedio de una función periódica en un periodo de un total de N muestras
discretas en el tiempo esta dado por.
1
0
)(1 N
n
nXfN
Si se obtiene el valor promedio de las N muestras en la ecuación (A1.11)
),( Aak
1
0
)2
(
][1 N
n
N
njk
k enXN
(A1.12)
En donde ][nX k es el conjunto de N muestras recolectadas dentro de una ventana que
abarca un periodo To de la señal. La ecuación (A1.12) es conocida como
Transformada Discreta de Fourier (DFT)
Si en la ecuación (A1.6) kj
kk eAAa
2
1),(
se hace kj
kk eAZ

Apéndice A1 - 7
1
0
22
),(N
n
N
njk
kk enXN
AZ
(A1.13)
Aplicando la fórmula de Euler
1
0
22cos
2),(
N
n
kkN
njsenk
N
nknX
NAZ
(A1.14)
1
0
1
0
222cos
2),(
N
n
k
N
n
kkN
nsenknX
Nj
N
nknX
NAZ
haciendo un cambio de variables
kikrk jZZAZ ),( (A1.15)
Aplicando identidades trigonométricas y el teorema de Pitágoras para expresar el vector
complejo en términos de amplitud y fase de la ecuación (A1.15) tenemos (ver apéndice
A.1.5) [32,33].
22
kikrk ZZA (A1.16)
kr
kik
Z
Zarctan (A1.17)
En donde kA es la amplitud de la señal )(tX k y k el ángulo en el momento que se
hizo la primera adquisición o muestreo de la señal )(tX k (ver apéndice A.1.6) [32,33].
Si k =1 el fasor que se encuentra es el de la señal fundamental, si k =2 de la segunda
armónica y así sucesivamente. De tal manera que para la componente fundamental
1
0
22cos][1
2),(1
N
n N
njsen
N
nnX
NAZ
(A1.18)
y por ejemplo para la 3er armónica k =3
1
0
33
23
23cos][
2),(
N
n N
njsen
N
nnX
NAZ
(A1.19)

Apéndice A1 - 8
A.1.2 Análisis gráfico de la ecuación.
De la misma manera que en la ecuación (A1.10) se obtuvo para k = 1 y k = 3 el fasor
( A , ) se grafica la ecuación (A1.12) (que como ya se menciona es la DFT de la
señal). Para tal efecto se utilizan las ecuaciones (A1.16) y (A1.17) en donde
(A1.20)
(A1.21)
La amplitud se calcula como ya se menciono con la ecuación (A1.16)
22
kikrk ZZA
Para el calculo de se utiliza la función arco seno por los motivos que se explican en el
capítulo 3.
k
kik
A
Zarcsen (A1.22)
Que para obtener en los cuatro cuadrantes se utiliza el esquema de la figura A1.4.
Figura A1.4 Arco seno en los cuatro cuadrantes
1
0
1
0
22
2cos
2
N
h
k
N
n
k
N
nsenknX
NjZki
y
N
nknX
NZkr

Apéndice A1 - 9
Utilizando las mismas señales de la figura A1.1
Con Hzf 600
la fundamental (k = 1)
)602cos(0.1)(1 ttX
la 3er armónica (3 0f con k = 3)
)4/1802cos(8.0)(3 ttX
y
)()()( 21 tXtXtX
La gráfica de las señales queda como en la figura A1.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
tiempo
Am
pli
tud
X1(t) X3(t) X(t) = X1(t) + X3(t)
Figura A1.5 Composición de una señal con armónicas
Se tabulan para valores discretos de t en donde t se propone de To/16 ya que se
proponen 16 muestras por periodo de la señal fundamental. Se ha demostrado que es
aceptable para analizar la componente fundamental de 60 Hz una frecuencia de
muestreo de 720 Hz o 12 muestras por periodo [1]. En este trabajo se han seleccionado
16 muestras por que son una potencia de 2, lo cual facilita el procesamiento del
algoritmo. En la tabla A1.1 se muestran los valores de las gráficas de la figura A1.5, los
datos se obtienen por medio de Excel.

Apéndice A1 - 10
Tabla A1.1 Valores de las señales )(1 tX , )(3 tX y )(tX
tiempo To/16 X1(t) X3(t) X(t)= X1(t)+X3(t)
0.0000 1.0000 0.5657 1.5657
0.0010 0.9239 0.7391 1.6630
0.0021 0.7071 0.0000 0.7071
0.0031 0.3827 -0.7391 -0.3564
0.0042 0.0000 -0.5657 -0.5657
0.0052 -0.3827 0.3061 -0.0765
0.0063 -0.7071 0.8000 0.0929
0.0073 -0.9239 0.3061 -0.6177
0.0083 -1.0000 -0.5657 -1.5657
0.0094 -0.9239 -0.7391 -1.6630
0.0104 -0.7071 0.0000 -0.7071
0.0115 -0.3827 0.7391 0.3564
0.0125 0.0000 0.5657 0.5657
0.0135 0.3827 -0.3061 0.0765
0.0146 0.7071 -0.8000 -0.0929
0.0156 0.9239 -0.3061 0.6177
0.0167 1.0000 0.5657 1.5657
0.0177 0.9239 0.7391 1.6630
0.0188 0.7071 0.0000 0.7071
0.0198 0.3827 -0.7391 -0.3564
0.0208 0.0000 -0.5657 -0.5657
0.0219 -0.3827 0.3061 -0.0765
0.0229 -0.7071 0.8000 0.0929
0.0240 -0.9239 0.3061 -0.6177
0.0250 -1.0000 -0.5657 -1.5657
0.0260 -0.9239 -0.7391 -1.6630
0.0271 -0.7071 0.0000 -0.7071
0.0281 -0.3827 0.7391 0.3564
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765
Cálculo de A y de la señal )602cos(0.1)(1 ttX (k = 1).
Para tal efecto se toma una ventana con las primeras 16 muestras de la señal )(1 tX .
Procedimiento:
Para cada n de la 0 a la 15 se calcula
16
21cos1
nnX
. En la tabla se
muestran los resultados de cada operación.
Se calcula la sumatoria de las 16 muestras
15
016
2
n
Zr . En la tabla se muestra
el resultado de la suma.
Para cada n de la 0 a la 15 se calcula
16
211
nsennX
. En la tabla se
muestran los resultados de cada operación.

Apéndice A1 - 11
Se calcula la sumatoria de las 16 muestras
15
016
2
n
Zi . En la tabla se muestran
los resultados de cada operación.
Con la ecuación (A1.16) se calcula la Amplitud (A). En la tabla se muestra el
resultado de la amplitud.
Con la ecuación (A1.22) y aplicando la figura A1.4 se calcula la fase ( ). En la
tabla se muestra el resultado en grados.
Se grafica la ventana
En la tabla A1.2 se muestran los resultados del cálculo en donde de A =1 y = 0
grados. En la figura A1.6 se muestra la gráfica de las tres señales en la ventana de
cálculo de las 16 muestras.
Tabla A1.2 Corrida para la señal )602cos(0.1)(1 ttX (k = 1).
tiempo X1(t) X3(t) X1(t)+X3(t) n X1[n] cos1(2n/16) Zr = X1[n] sen1(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.5657 1.5657 0 1.0000 1.0000 0.0000 0.0000 A = 1
0.0010 0.9239 0.7391 1.6630 1 0.8536 0.3536
0.0021 0.7071 0.0000 0.7071 2 0.5000 0.5000 = aseno(|Zi/A|)
0.0031 0.3827 -0.7391 -0.3564 3 0.1464 0.3536 (radianes) 0.0000
0.0042 0.0000 -0.5657 -0.5657 4 0.0000 0.0000 (grados) 0.0000
0.0052 -0.3827 0.3061 -0.0765 5 0.1464 -0.3536 Primer cuadrante (+,+)
0.0063 -0.7071 0.8000 0.0929 6 0.5000 -0.5000 =
0.0073 -0.9239 0.3061 -0.6177 7 0.8536 -0.3536 (grados) = 0.0000
0.0083 -1.0000 -0.5657 -1.5657 8 1.0000 0.0000
0.0094 -0.9239 -0.7391 -1.6630 9 0.8536 0.3536
0.0104 -0.7071 0.0000 -0.7071 10 0.5000 0.5000
0.0115 -0.3827 0.7391 0.3564 11 0.1464 0.3536
0.0125 0.0000 0.5657 0.5657 12 0.0000 0.0000
0.0135 0.3827 -0.3061 0.0765 13 0.1464 -0.3536
0.0146 0.7071 -0.8000 -0.0929 14 0.5000 -0.5000
0.0156 0.9239 -0.3061 0.6177 15 0.8536 -0.3536
0.0167 1.0000 0.5657 1.5657
0.0177 0.9239 0.7391 1.6630
0.0188 0.7071 0.0000 0.7071
0.0198 0.3827 -0.7391 -0.3564
0.0208 0.0000 -0.5657 -0.5657
0.0219 -0.3827 0.3061 -0.0765
0.0229 -0.7071 0.8000 0.0929
0.0240 -0.9239 0.3061 -0.6177
0.0250 -1.0000 -0.5657 -1.5657
0.0260 -0.9239 -0.7391 -1.6630
0.0271 -0.7071 0.0000 -0.7071
0.0281 -0.3827 0.7391 0.3564
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765

Apéndice A1 - 12
Gráfica de las tres señales en la ventana de cálculo
-2.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
2.00
tiempo
Am
plit
ud
X1(t) X3(t) X(t)= X1(t)+X3(t)
Figura A1.6 Gráfica de las señales )(1 tX , )(3 tX y )(tX en la ventana de 16 muestras
Análisis:
El cálculo de A entrega la amplitud máxima de la señal, que en efecto es el valor
promedio de los valores instantáneos calculados en las ecuaciones (A1.10.2) y
(A1.10.3), con la aclaración que en ese cálculo no se consideró la constante ½ de la
ecuación
kj
kk eAAa
2
1),(
El ángulo de fase o desfase calculado es el valor del ángulo del la señal en el ínstate
en que se toma la primer muestra o se hace la primer adquisición, que en el caso anterior
como se aprecia en el inicio de la gráfica de la figura A1.6 es de cero grados para la
señal fundamental.
Para corroborar el análisis anterior, se procede a calcular A y para
)4/602(3cos8.0)(3 ttX en donde se espera una A = 0.8 y un = 45 grados.
El procedimiento de cálculo es el mismo que en la corrida anterior, en la tabla A1.3 se
presenta la corrida para la señal )(3 tX en donde los valores de A y fueron los
esperados. En la figura A1.6 se aprecia que en la gráfica de )(3 tX la ventana de cálculo
se inicia a los 45 grados.

Apéndice A1 - 13
Tabla A1.3 Corrida para la señal )4/1802cos(8.0)(3 ttX
tiempo X1(t) X3(t) X1(t)+X3(t) n X3[n]cos3(2n/16) Zr = X3[n]sen3(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.5657 1.5657 0 0.5657 0.5657 0.0000 0.5657 A = 0.8
0.0010 0.9239 0.7391 1.6630 1 0.2828 0.6828
0.0021 0.7071 0.0000 0.7071 2 0.0000 0.0000 a = aseno(|Zi/A|)
0.0031 0.3827 -0.7391 -0.3564 3 0.6828 0.2828 a (radianes)= 0.7854
0.0042 0.0000 -0.5657 -0.5657 4 0.0000 0.5657 a (grados) = 45.00
0.0052 -0.3827 0.3061 -0.0765 5 0.2828 -0.1172 Primer cuadrante (+,+)
0.0063 -0.7071 0.8000 0.0929 6 0.5657 0.5657 f = a
0.0073 -0.9239 0.3061 -0.6177 7 -0.1172 0.2828 f (grados) = 45.00
0.0083 -1.0000 -0.5657 -1.5657 8 0.5657 0.0000
0.0094 -0.9239 -0.7391 -1.6630 9 0.2828 0.6828
0.0104 -0.7071 0.0000 -0.7071 10 0.0000 0.0000
0.0115 -0.3827 0.7391 0.3564 11 0.6828 0.2828
0.0125 0.0000 0.5657 0.5657 12 0.0000 0.5657
0.0135 0.3827 -0.3061 0.0765 13 0.2828 -0.1172
0.0146 0.7071 -0.8000 -0.0929 14 0.5657 0.5657
0.0156 0.9239 -0.3061 0.6177 15 -0.1172 0.2828
0.0167 1.0000 0.5657 1.5657
0.0177 0.9239 0.7391 1.6630
0.0188 0.7071 0.0000 0.7071
0.0198 0.3827 -0.7391 -0.3564
0.0208 0.0000 -0.5657 -0.5657
0.0219 -0.3827 0.3061 -0.0765
0.0229 -0.7071 0.8000 0.0929
0.0240 -0.9239 0.3061 -0.6177
0.0250 -1.0000 -0.5657 -1.5657
0.0260 -0.9239 -0.7391 -1.6630
0.0271 -0.7071 0.0000 -0.7071
0.0281 -0.3827 0.7391 0.3564
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765
Conclusión:
Los cálculos de la Amplitud y la Face utilizando la DFT (ecuación (A1.12) nos
proporcionan respectivamente los valores de la amplitud máxima de la señal y el ángulo
de la señal en el instante de la primera adquisición.
Haciendo corridas con otro número de muestras se encontró que las ventanas de
muestreo deben ser de mínimo To (un periodo de la frecuencia fundamental) y
múltiplos de To para las armónicas. Como se puede observar en las corridas anteriores
la ventana abarca un periodo de la frecuencia fundamental y tres periodos de la tercera
armónica.
A.1.2.1 Propiedad de filtrado de la DFT.
Partiendo de que X(t) es la sumatoria de las )(tX k señales, se demuestra la propiedad de
filtrado si en lugar de tomar las muestras de las respectivas señales )(tX k se toman las
muestras de la señal X(t). Para tal efecto se procede a generar una corrida para la señal
X(t)= X1(t)+X3(t) y de la cual se desea analizar la A y el para la señal X3(t). La

Apéndice A1 - 14
corrida es similar a la que se hizo para X3(t) pero las X[n] muestras se toman de X(t) en
lugar de X3(t).
Tabla A1.4 Corrida tomando las muestras de la señal )()()( 21 tXtXtX
tiempo X1(t) X3(t) X(t)= X1(t)+X3(t) n X[n]cos3(2n/16) Zr = X[n]sen3(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.5657 1.5657 0 1.5657 0.5657 0.0000 0.5657 A = 0.8
0.0010 0.9239 0.7391 1.6630 1 0.6364 1.5364
0.0021 0.7071 0.0000 0.7071 2 -0.5000 0.5000 = aseno(|Zi/A|)
0.0031 0.3827 -0.7391 -0.3564 3 0.3293 0.1364 (radianes) 0.7854
0.0042 0.0000 -0.5657 -0.5657 4 0.0000 0.5657 (grados) 45.00
0.0052 -0.3827 0.3061 -0.0765 5 -0.0707 0.0293 Primer cuadrante (+,+)
0.0063 -0.7071 0.8000 0.0929 6 0.0657 0.0657 =
0.0073 -0.9239 0.3061 -0.6177 7 0.2364 -0.5707 (grados) = 45.00
0.0083 -1.0000 -0.5657 -1.5657 8 1.5657 0.0000
0.0094 -0.9239 -0.7391 -1.6630 9 0.6364 1.5364
0.0104 -0.7071 0.0000 -0.7071 10 -0.5000 0.5000
0.0115 -0.3827 0.7391 0.3564 11 0.3293 0.1364
0.0125 0.0000 0.5657 0.5657 12 0.0000 0.5657
0.0135 0.3827 -0.3061 0.0765 13 -0.0707 0.0293
0.0146 0.7071 -0.8000 -0.0929 14 0.0657 0.0657
0.0156 0.9239 -0.3061 0.6177 15 0.2364 -0.5707
0.0167 1.0000 0.5657 1.5657
0.0177 0.9239 0.7391 1.6630
0.0188 0.7071 0.0000 0.7071
0.0198 0.3827 -0.7391 -0.3564
0.0208 0.0000 -0.5657 -0.5657
0.0219 -0.3827 0.3061 -0.0765
0.0229 -0.7071 0.8000 0.0929
0.0240 -0.9239 0.3061 -0.6177
0.0250 -1.0000 -0.5657 -1.5657
0.0260 -0.9239 -0.7391 -1.6630
0.0271 -0.7071 0.0000 -0.7071
0.0281 -0.3827 0.7391 0.3564
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765
Conclusión:
La amplitud A y el ángulo de fase encontrados pertenecen a la señal X3(t)
Corrimiento de la ventana
Se presenta el cálculo de 1A , 1 , 3A y 3 tomando como muestras la señal X(t) para
otras dos ventanas diferentes. En la tabla A1.5 se presenta la corrida para el cálculo de
3A y 3 (tercer armónico) y en la tabla A1.6 se presenta la corrida para calcular 1A y 1
(señal fundamental). Como se puede observar el valor del cálculo de la amplitud de las
señales es el mismo que cuando se calculó con la ventana en el origen t = 0. Sin
embargo para las ´s el valor calculado apunta en el ángulo en el que se hizo la primera
adquisición. En la figura A1.7 se muestra la gráfica de las señales en la ventana de
cálculo, en donde también, se puede observar el ángulo de desfase de ambas señales con
respecto a la primera adquisición.

Apéndice A1 - 15
Tabla A1.5 Corrida para calcular 3A y 3 (tercer armónico)
-2.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
2.00
tiempo
Am
plit
ud
X1(t) X3(t) X(t)= X1(t)+X3(t)
Figura A1.7 Gráfica de las señales en la ventana de cálculo
tiempo X1(t) X3(t) X(t)= X1(t)+X3(t) n X[n]cos3(2n/16) Zr = X[n]sen3(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.5657 1.5657 A = 0.8
0.0010 0.9239 0.7391 1.6630
0.0021 0.7071 0.0000 0.7071 = aseno(|Zi/A|)
0.0031 0.3827 -0.7391 -0.3564 (radianes) 1.1781
0.0042 0.0000 -0.5657 -0.5657 (grados) 67.50
0.0052 -0.3827 0.3061 -0.0765 0 -0.0765 0.3061 0.0000 0.7391 Primer cuadrante (+,+)
0.0063 -0.7071 0.8000 0.0929 1 0.0355 0.0858 =
0.0073 -0.9239 0.3061 -0.6177 2 0.4368 -0.4368 (grados) = 67.50
0.0083 -1.0000 -0.5657 -1.5657 3 1.4465 0.5992
0.0094 -0.9239 -0.7391 -1.6630 4 0.0000 1.6630
0.0104 -0.7071 0.0000 -0.7071 5 -0.6533 0.2706
0.0115 -0.3827 0.7391 0.3564 6 0.2520 0.2520
0.0125 0.0000 0.5657 0.5657 7 -0.2165 0.5226
0.0135 0.3827 -0.3061 0.0765 8 -0.0765 0.0000
0.0146 0.7071 -0.8000 -0.0929 9 0.0355 0.0858
0.0156 0.9239 -0.3061 0.6177 10 0.4368 -0.4368
0.0167 1.0000 0.5657 1.5657 11 1.4465 0.5992
0.0177 0.9239 0.7391 1.6630 12 0.0000 1.6630
0.0188 0.7071 0.0000 0.7071 13 -0.6533 0.2706
0.0198 0.3827 -0.7391 -0.3564 14 0.2520 0.2520
0.0208 0.0000 -0.5657 -0.5657 15 -0.2165 0.5226
0.0219 -0.3827 0.3061 -0.0765
0.0229 -0.7071 0.8000 0.0929
0.0240 -0.9239 0.3061 -0.6177
0.0250 -1.0000 -0.5657 -1.5657
0.0260 -0.9239 -0.7391 -1.6630
0.0271 -0.7071 0.0000 -0.7071
0.0281 -0.3827 0.7391 0.3564
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765

Apéndice A1 - 16
Tabla A1.6 Corrida para calcular 1A y 1 (señal fundamental)
Cálculo de 1A , 1 y 3A , 3 para la segunda ventana diferente.
Las tablas A1.7 y A1.8 y la grafica A1.8 muestran el mismo experimento para una
tercer ventana presentándose nuevamente los resultados esperados
tiempo X1(t) X3(t) X(t)= X1(t)+X3(t) n X[n]cos1(2n/16) Zr = X[n]sen1(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.5657 1.5657 A = 1
0.0010 0.9239 0.7391 1.6630
0.0021 0.7071 0.0000 0.7071 = aseno(|Zi/A|)
0.0031 0.3827 -0.7391 -0.3564 (radianes) 1.1781
0.0042 0.0000 -0.5657 -0.5657 (grados) 67.50
0.0052 -0.3827 0.3061 -0.0765 0 -0.0765 -0.3827 0.0000 -0.9239 Tercer cuadrante (-,-)
0.0063 -0.7071 0.8000 0.0929 1 0.0858 0.0355 = 180+
0.0073 0.9239 0.3061 -0.6177 2 -0.4368 -0.4368 (grados) = 247.50
0.0083 -1.0000 -0.5657 -1.5657 3 -0.5992 -1.4465
0.0094 -0.9239 -0.7391 -1.6630 4 0.0000 -1.6630
0.0104 -0.7071 0.0000 -0.7071 5 0.2706 -0.6533
0.0115 -0.3827 0.7391 0.3564 6 -0.2520 0.2520
0.0125 0.0000 0.5657 0.5657 7 -0.5226 0.2165
0.0135 0.3827 -0.3061 0.0765 8 -0.0765 0.0000
0.0146 0.7071 -0.8000 -0.0929 9 0.0858 0.0355
0.0156 0.9239 -0.3061 0.6177 10 -0.4368 -0.4368
0.0167 1.0000 0.5657 1.5657 11 -0.5992 -1.4465
0.0177 0.9239 0.7391 1.6630 12 0.0000 -1.6630
0.0188 0.7071 0.0000 0.7071 13 0.2706 -0.6533
0.0198 0.3827 -0.7391 -0.3564 14 -0.2520 0.2520
0.0208 0.0000 -0.5657 -0.5657 15 -0.5226 0.2165
0.0219 -0.3827 0.3061 -0.0765
0.0229 -0.7071 0.8000 0.0929
0.0240 -0.9239 0.3061 -0.6177
0.0250 -1.0000 -0.5657 -1.5657
0.0260 -0.9239 -0.7391 -1.6630
0.0271 -0.7071 0.0000 -0.7071
0.0281 -0.3827 0.7391 0.3564
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765

Apéndice A1 - 17
Tabla A1.7 Corrida para calcular 3A y 3 en la ventana 3
-2.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
2.00
tiempo
Am
plit
ud
X1(t) X3(t) X(t)= X1(t)+X3(t)
Figura A1.8 Gráfica de las señales en la tercera ventana de cálculo
tiempo X1(t) X3(t) X(t)= X1(t)+X3(t) n X[n]cos3(2n/16) Zr = X[n]sen3(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.5657 1.5657 A = 0.8
0.0010 0.9239 0.7391 1.6630
0.0021 0.7071 0.0000 0.7071 = aseno(|Zi/A|)
0.0031 0.3827 -0.7391 -0.3564 (radianes) 0.7854
0.0042 0.0000 -0.5657 -0.5657 (grados) 45.00
0.0052 -0.3827 0.3061 -0.0765 Cuarto cuadrante (+,-)
0.0063 -0.7071 0.8000 0.0929 =360 -
0.0073 -0.9239 0.3061 -0.6177 (grados) = 315.00
0.0083 -1.0000 -0.5657 -1.5657
0.0094 -0.9239 -0.7391 -1.6630
0.0104 -0.7071 0.0000 -0.7071
0.0115 -0.3827 0.7391 0.3564
0.0125 0.0000 0.5657 0.5657 0 0.5657 0.5657 0.0000 -0.5657
0.0135 0.3827 -0.3061 0.0765 1 0.0293 0.0707
0.0146 0.7071 -0.8000 -0.0929 2 0.0657 -0.0657
0.0156 0.9239 -0.3061 0.6177 3 -0.5707 -0.2364
0.0167 1.0000 0.5657 1.5657 4 0.0000 -1.5657
0.0177 0.9239 0.7391 1.6630 5 1.5364 -0.6364
0.0188 0.7071 0.0000 0.7071 6 0.5000 0.5000
0.0198 0.3827 -0.7391 -0.3564 7 0.1364 -0.3293
0.0208 0.0000 -0.5657 -0.5657 8 0.5657 0.0000
0.0219 -0.3827 0.3061 -0.0765 9 0.0293 0.0707
0.0229 -0.7071 0.8000 0.0929 10 0.0657 -0.0657
0.0240 -0.9239 0.3061 -0.6177 11 -0.5707 -0.2364
0.0250 -1.0000 -0.5657 -1.5657 12 0.0000 -1.5657
0.0260 -0.9239 -0.7391 -1.6630 13 1.5364 -0.6364
0.0271 -0.7071 0.0000 -0.7071 14 0.5000 0.5000
0.0281 -0.3827 0.7391 0.3564 15 0.1364 -0.3293
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765

Apéndice A1 - 18
Tabla A1.8 Corrida para calcular 1A y 1 en la ventana 3
tiempo X1(t) X3(t) X(t)= X1(t)+X3(t) n X[n]cos(2n/16) Zr = X[n]sen(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.5657 1.5657 A = 1
0.0010 0.9239 0.7391 1.6630
0.0021 0.7071 0.0000 0.7071 = aseno(|Zi/A|)
0.0031 0.3827 -0.7391 -0.3564 (radianes) 1.5708
0.0042 0.0000 -0.5657 -0.5657 (grados) 90.00
0.0052 -0.3827 0.3061 -0.0765 Primer cuadrante (+,+)
0.0063 -0.7071 0.8000 0.0929 =
0.0073 -0.9239 0.3061 -0.6177 (grados) = 90.00
0.0083 -1.0000 -0.5657 -1.5657
0.0094 -0.9239 -0.7391 -1.6630
0.0104 -0.7071 0.0000 -0.7071
0.0115 -0.3827 0.7391 0.3564
0.0125 0.0000 0.5657 0.5657 0 0.5657 0.0000 0.0000 1.0000
0.0135 0.3827 -0.3061 0.0765 1 0.0707 0.0293
0.0146 0.7071 -0.8000 -0.0929 2 -0.0657 -0.0657
0.0156 0.9239 -0.3061 0.6177 3 0.2364 0.5707
0.0167 1.0000 0.5657 1.5657 4 0.0000 1.5657
0.0177 0.9239 0.7391 1.6630 5 -0.6364 1.5364
0.0188 0.7071 0.0000 0.7071 6 -0.5000 0.5000
0.0198 0.3827 -0.7391 -0.3564 7 0.3293 -0.1364
0.0208 0.0000 -0.5657 -0.5657 8 0.5657 0.0000
0.0219 -0.3827 0.3061 -0.0765 9 0.0707 0.0293
0.0229 -0.7071 0.8000 0.0929 10 -0.0657 -0.0657
0.0240 -0.9239 0.3061 -0.6177 11 0.2364 0.5707
0.0250 -1.0000 -0.5657 -1.5657 12 0.0000 1.5657
0.0260 -0.9239 -0.7391 -1.6630 13 -0.6364 1.5364
0.0271 -0.7071 0.0000 -0.7071 14 -0.5000 0.5000
0.0281 -0.3827 0.7391 0.3564 15 0.3293 -0.1364
0.0292 0.0000 0.5657 0.5657
0.0302 0.3827 -0.3061 0.0765
Prueba con tres señales.
Finalmente se procede a hacer una última prueba con 3 señales.
)602cos(0.1)(1 ttX , frecuencia fundamental
)1202cos(2.0)(2 ttX , segunda armónica
)3/1802cos(4.0)(3 ttX , tercera armónica y
)()()()( 321 tXtXtXtX , señal fundamental con dos armónicas

Apéndice A1 - 19
Tabla A1.9 Valores de )602cos(0.1 t , )1202cos(2.0 t ,
)3/1802cos(4.0 t y )()()( 321 tXtXtX ,
tiempo X1(t) X2(t) X3(t) X(t)= X1(t)+X2(t)+X3(t)
0.0000 1.0000 0.0000 0.2000 1.2000
0.0010 0.9239 -0.1414 0.3966 1.1790
0.0021 0.7071 0.0000 0.1035 0.8106
0.0031 0.3827 0.1414 -0.3173 0.2068
0.0042 0.0000 0.2000 -0.3464 -0.1464
0.0052 -0.3827 0.1414 0.0522 -0.1891
0.0063 -0.7071 0.0000 0.3864 -0.3207
0.0073 -0.9239 -0.1414 0.2435 -0.8218
0.0083 -1.0000 -0.2000 -0.2000 -1.4000
0.0094 -0.9239 -0.1414 -0.3966 -1.4619
0.0104 -0.7071 0.0000 -0.1035 -0.8106
0.0115 -0.3827 0.1414 0.3173 0.0761
0.0125 0.0000 0.2000 0.3464 0.5464
0.0135 0.3827 0.1414 -0.0522 0.4719
0.0146 0.7071 0.0000 -0.3864 0.3207
0.0156 0.9239 -0.1414 -0.2435 0.5390
0.0167 1.0000 -0.2000 0.2000 1.0000
0.0177 0.9239 -0.1414 0.3966 1.1790
0.0188 0.7071 0.0000 0.1035 0.8106
0.0198 0.3827 0.1414 -0.3173 0.2068
0.0208 0.0000 0.2000 -0.3464 -0.1464
0.0219 -0.3827 0.1414 0.0522 -0.1891
0.0229 -0.7071 0.0000 0.3864 -0.3207
0.0240 -0.9239 -0.1414 0.2435 -0.8218
0.0250 -1.0000 -0.2000 -0.2000 -1.4000
0.0260 -0.9239 -0.1414 -0.3966 -1.4619
0.0271 -0.7071 0.0000 -0.1035 -0.8106
0.0281 -0.3827 0.1414 0.3173 0.0761
0.0292 0.0000 0.2000 0.3464 0.5464
0.0302 0.3827 0.1414 -0.0522 0.4719
-2.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
tiempo
Am
plit
ud
X1(t) X2(t) X3(t) X(t)= X1(t)+X2(t)+X3(t)
Figura A1.9 Gráfica de las cuatro señales.

Apéndice A1 - 20
Tabla A1.10 Corrida para )602cos(0.1)(1 ttX , frecuencia fundamental
tiempo X1(t) X2(t) X3(t) X(t)= X1(t)+X2(t)+X3(t) n X[n]cos1(2n/16) Zr = X[n]sen1(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.0000 0.2000 1.2000 A = 1
0.0010 0.9239 -0.1414 0.3966 1.1790
0.0021 0.7071 0.0000 0.1035 0.8106 = aseno(|Zi/A|)
0.0031 0.3827 0.1414 -0.3173 0.2068 (radianes) 0.7854
0.0042 0.0000 0.2000 -0.3464 -0.1464 (grados) 45.00
0.0052 -0.3827 0.1414 0.0522 -0.1891 Primer cuadrante (+,+)
0.0063 -0.7071 0.0000 0.3864 -0.3207 =
0.0073 -0.9239 -0.1414 0.2435 -0.8218 (grados) = 45.00
0.0083 -1.0000 -0.2000 -0.2000 -1.4000
0.0094 -0.9239 -0.1414 -0.3966 -1.4619
0.0104 -0.7071 0.0000 -0.1035 -0.8106
0.0115 -0.3827 0.1414 0.3173 0.0761
0.0125 0.0000 0.2000 0.3464 0.5464
0.0135 0.3827 0.1414 -0.0522 0.4719
0.0146 0.7071 0.0000 -0.3864 0.3207 0 0.3207 0.7071 0.0000 0.7071
0.0156 0.9239 -0.1414 -0.2435 0.5390 1 0.4979 0.2062
0.0167 1.0000 -0.2000 0.2000 1.0000 2 0.7071 0.7071
0.0177 0.9239 -0.1414 0.3966 1.1790 3 0.4512 1.0893
0.0188 0.7071 0.0000 0.1035 0.8106 4 0.0000 0.8106
0.0198 0.3827 0.1414 -0.3173 0.2068 5 -0.0791 0.1910
0.0208 0.0000 0.2000 -0.3464 -0.1464 6 0.1035 -0.1035
0.0219 -0.3827 0.1414 0.0522 -0.1891 7 0.1747 -0.0723
0.0229 -0.7071 0.0000 0.3864 -0.3207 8 0.3207 0.0000
0.0240 -0.9239 -0.1414 0.2435 -0.8218 9 0.7592 0.3145
0.0250 -1.0000 -0.2000 -0.2000 -1.4000 10 0.9899 0.9899
0.0260 -0.9239 -0.1414 -0.3966 -1.4619 11 0.5594 1.3506
0.0271 -0.7071 0.0000 -0.1035 -0.8106 12 0.0000 0.8106
0.0281 -0.3827 0.1414 0.3173 0.0761 13 0.0291 -0.0703
0.0292 0.0000 0.2000 0.3464 0.5464 14 0.3864 -0.3864
0.0302 0.3827 0.1414 -0.0522 0.4719 15 0.4360 -0.1806

Apéndice A1 - 21
Tabla A1.11 Corrida para )1202cos(2.0)(2 ttX , segunda armónica
tiempo X1(t) X2(t) X3(t) X(t)= X1(t)+X2(t)+X3(t) n X[n]cos2(2n/16) Zr = X[n]sen2(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.0000 0.2000 1.2000 A = 0.2
0.0010 0.9239 -0.1414 0.3966 1.1790
0.0021 0.7071 0.0000 0.1035 0.8106 = aseno(|Zi/A|)
0.0031 0.3827 0.1414 -0.3173 0.2068 (radianes) 1.5708
0.0042 0.0000 0.2000 -0.3464 -0.1464 (grados) 90.00
0.0052 -0.3827 0.1414 0.0522 -0.1891 Cuarto cuadrante (+,-)
0.0063 -0.7071 0.0000 0.3864 -0.3207 =360-
0.0073 -0.9239 -0.1414 0.2435 -0.8218 (grados) = 270.00
0.0083 -1.0000 -0.2000 -0.2000 -1.4000
0.0094 -0.9239 -0.1414 -0.3966 -1.4619
0.0104 -0.7071 0.0000 -0.1035 -0.8106
0.0115 -0.3827 0.1414 0.3173 0.0761
0.0125 0.0000 0.2000 0.3464 0.5464
0.0135 0.3827 0.1414 -0.0522 0.4719
0.0146 0.7071 0.0000 -0.3864 0.3207 0 0.3207 0.0000 0.0000 -0.2000
0.0156 0.9239 -0.1414 -0.2435 0.5390 1 0.3811 0.3811
0.0167 1.0000 -0.2000 0.2000 1.0000 2 0.0000 1.0000
0.0177 0.9239 -0.1414 0.3966 1.1790 3 -0.8337 0.8337
0.0188 0.7071 0.0000 0.1035 0.8106 4 -0.8106 0.0000
0.0198 0.3827 0.1414 -0.3173 0.2068 5 -0.1462 -0.1462
0.0208 0.0000 0.2000 -0.3464 -0.1464 6 0.0000 0.1464
0.0219 -0.3827 0.1414 0.0522 -0.1891 7 -0.1337 0.1337
0.0229 -0.7071 0.0000 0.3864 -0.3207 8 -0.3207 0.0000
0.0240 -0.9239 -0.1414 0.2435 -0.8218 9 -0.5811 -0.5811
0.0250 -1.0000 -0.2000 -0.2000 -1.4000 10 0.0000 -1.4000
0.0260 -0.9239 -0.1414 -0.3966 -1.4619 11 1.0337 -1.0337
0.0271 -0.7071 0.0000 -0.1035 -0.8106 12 0.8106 0.0000
0.0281 -0.3827 0.1414 0.3173 0.0761 13 -0.0538 -0.0538
0.0292 0.0000 0.2000 0.3464 0.5464 14 0.0000 -0.5464
0.0302 0.3827 0.1414 -0.0522 0.4719 15 0.3337 -0.3337

Apéndice A1 - 22
Tabla A1.12 Corrida para )3/1802cos(4.0)(3 ttX , tercera armónica
-2.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
tiempo
Am
plit
ud
X1(t) X2(t) X3(t) X(t)= X1(t)+X2(t)+X3(t)
Figura A1.10 Gráfica de las señales en la ventana de cálculo
tiempo X1(t) X2(t) X3(t) X(t)= X1(t)+X2(t)+X3(t) n X[n]cos3(2n/16) Zr = X[n]sen3(2n/16) Zi = Amplitud = r² + (Zi)²
0.0000 1.0000 0.0000 0.2000 1.2000 A = 0.4
0.0010 0.9239 -0.1414 0.3966 1.1790
0.0021 0.7071 0.0000 0.1035 0.8106 = aseno(|Zi/A|)
0.0031 0.3827 0.1414 -0.3173 0.2068 (radianes) 0.2618
0.0042 0.0000 0.2000 -0.3464 -0.1464 (grados) 15.00
0.0052 -0.3827 0.1414 0.0522 -0.1891 Terser cuadrante (-,-)
0.0063 -0.7071 0.0000 0.3864 -0.3207 =180+
0.0073 -0.9239 -0.1414 0.2435 -0.8218 (grados) = 195.00
0.0083 -1.0000 -0.2000 -0.2000 -1.4000
0.0094 -0.9239 -0.1414 -0.3966 -1.4619
0.0104 -0.7071 0.0000 -0.1035 -0.8106
0.0115 -0.3827 0.1414 0.3173 0.0761
0.0125 0.0000 0.2000 0.3464 0.5464
0.0135 0.3827 0.1414 -0.0522 0.4719
0.0146 0.7071 0.0000 -0.3864 0.3207 0 0.3207 -0.3864 0.0000 -0.1035
0.0156 0.9239 -0.1414 -0.2435 0.5390 1 0.2062 0.4979
0.0167 1.0000 -0.2000 0.2000 1.0000 2 -0.7071 0.7071
0.0177 0.9239 -0.1414 0.3966 1.1790 3 -1.0893 -0.4512
0.0188 0.7071 0.0000 0.1035 0.8106 4 0.0000 -0.8106
0.0198 0.3827 0.1414 -0.3173 0.2068 5 0.1910 -0.0791
0.0208 0.0000 0.2000 -0.3464 -0.1464 6 -0.1035 -0.1035
0.0219 -0.3827 0.1414 0.0522 -0.1891 7 0.0723 -0.1747
0.0229 -0.7071 0.0000 0.3864 -0.3207 8 0.3207 0.0000
0.0240 -0.9239 -0.1414 0.2435 -0.8218 9 0.3145 0.7592
0.0250 -1.0000 -0.2000 -0.2000 -1.4000 10 -0.9899 0.9899
0.0260 -0.9239 -0.1414 -0.3966 -1.4619 11 -1.3506 -0.5594
0.0271 -0.7071 0.0000 -0.1035 -0.8106 12 0.0000 -0.8106
0.0281 -0.3827 0.1414 0.3173 0.0761 13 -0.0703 0.0291
0.0292 0.0000 0.2000 0.3464 0.5464 14 -0.3864 -0.3864
0.0302 0.3827 0.1414 -0.0522 0.4719 15 0.1806 -0.4360

Apéndice A1 - 23
A.1.3 Números complejos [32,33]
En ingeniería eléctrica los números complejos son usados para simplificar con simples
reglas algebraicas la manipulación de las señales sinusoidales y su visualización a través
de la geometría vectorial.
Los números imaginarios surgen como una necesidad de poder resolver la ecuación.
X 2 = - 1
El símbolo j se utiliza en ingeniería eléctrica para representar 1 , pro lo tanto, las
soluciones de la ecuación son:
jX
Los números complejos son una extensión de los números reales, están formados por un
número real y uno imaginario. Surgen como una necesidad de poder resolver la
ecuación cuadrática.
02 cbxax
Cuya solución para x es
a
acbbx
2
42
Ejemplo, sea la ecuación
012 xx
412
1
2
1x
86.05.0 jx
Por convención los números complejos se representan con la letra z y en general se
escriben como z = x + j y
A.1.4 Fórmula de Euler xixeix sincos
La fórmula de Euler se demuestra utilizando las series de Taylor. Las series para las
funciones trigonométricas seno y coseno se pueden reagrupar como sigue:
0
244642
!24!4...
!6!4!21cos
n
nn
n
x
n
xxxxx

Apéndice A1 - 24
0
3414753
!34!14...
!7!5!3sin
n
nn
n
x
n
xxxxxx
La serie para xe es:
0
43210
!...
!4!3!2!1!0 n
nx
n
xxxxxxe
y para ixe
000 !!! n
nn
n
nn
n
n
ix in
x
n
xi
n
ixe
reordenando términos y reagrupando los términos con i
0
3414
0
244
!34!14!24!4 n
nn
n
nnix
n
x
n
xi
n
x
n
xe
En donde se aprecia que la parte real es la serie de Taylor para el coseno y la imaginaria
la del seno, por lo tanto.
xixeix sincos
Las fórmulas de Euler inversas nos permiten escribir las funciones seno y coseno en
términos de exponentes complejos:
2cos
jj ee
j
eesen
jj
2
A.1.5 Representación gráfica vectorial.
Hasta antes de los números complejos la recta numérica fue suficiente para representar
los números reales, al agregarse la parte imaginaria se agrega también otra recta
perpendicular para representar la parte imaginaria (plano cartesiano).

Apéndice A1 - 25
El número complejo en el plano cartesiano queda representado como un punto con
coordenadas (x,y) o como un vector de longitud r y ángulo , figura A.1.11
Figura A.1.11 Plano complejo cartesiano
Como ya se mencionó, el número complejo esta determinado por
jyxz (1)
Las coordenadas (x,y) pueden ser determinadas por las identidades trigonométricas
cosrx (2)
rseny (3)
sustituyendo. (2) y (3) en (1)
rjsenrz cos
)(cos jsenrz (4)
aplicando la formula de Euler
jsene j cos
la ecuación (4) queda
jrez (5)
La ecuación anterior es definida como la forma exponencial compleja, gráficamente z
queda representado por el vector complejo de magnitud r y ángulo, figura A.1.12.

Apéndice A1 - 26
Figura A.1.12 Forma exponencial compleja
A partir del punto (x,y) se puede encontrar el vector complejo aplicando identidades
trigonométricas y el teorema de Pitágoras.
x
yarctan (6)
22 yxr (7)
A.1.6 Vector complejo rotatorio
Dados los números complejos 1z , 2z y el producto 213 zzz en donde
1
11
jeAz y
2
22
jeAz
entonces:
212121
2121213
jjjjjeAAeeAAeAeAz
Del resultado anterior se concluye que en el producto de dos números complejos, las
amplitudes se multipliquen y los ángulos se suman.
Si la amplitud de uno de los complejos es uno, entonces la amplitud del vector producto
permanece constante mientras que el ángulo se incrementa, ver figura A.1.13

Apéndice A1 - 27
Figura A.1.13 Producto vectorial
Un número complejo representado en su forma exponencial compleja
jAe
cuyo argumento es el de una señala cosenoidal (señal de interes)
)2( tf
queda de la forma
)2()(
tfjAetZ
aplicando las leyes de los exponentes
)2(
)(tfjj eAetZ
(A.1.23)
Analizando Z(t) se observa que éste esta compuesto del producto de dos complejos.
Retomando el análisis gráfico que se hizojAe y
tfje
2son dos vectores en el plano
complejo. En donde jAe es un vector fijo y
tfje
2es un vector de amplitud uno y
variante con el tiempo (función compleja evaluada en el tiempo).
En la medida que t se incrementa el vector complejo Z(t) simplemente rotará a una tasa
constante, determinada por f2 describiendo un circulo de radio A , de tal modo que
Z(t) se convierte en un vector complejo rotatorio.
Al vector fijojAe compuesto por una amplitud A y un desfase se le denomina
fasor. De este hecho la señal exponencial compleja se le denomina también fasor
rotatorio.
El fasor rotatorio da una vuelta completa cada que el tiempo del ángulo )(t cambia
2 radianes.
El sentido de rotación es como se observa en la figura A.1.13 en sentido inverso a las
manecillas del reloj por que )2( ft se incrementa a medida que el tiempo se
incrementa.
Si la frecuencia es negativa, )2( ft cambia en dirección negativa a medida que se
incrementa el tiempo es decir que la rotación es en sentido de las manecillas del reloj.
De la ecuación (A.1.23) también se observa que para t = 0,
jAetZ )(
Por tal motivo a se le denomina ángulo de desfase, ya que es el ángulo con el que
inicia la señal de acuerdo a una referencia temporal.

Apéndice A2 - 1
A2
Artículos

Synchrophasor Design Based on a DSP-Microcontroller
Rafael San Vicente1, 2, Raúl Cortés2, Jaime Robles2, J. Enrique Chong-Quero1 1 Instituto Tecnológico y de Estudios Superiores de Monterrey, Campus Estado de México
Carretera Lago de Guadalupe Km 3.5 Col. M.M. Juárez 52926 Edo de Mex México Phone: +55 5864-5555 ext 2485, Email: [email protected], [email protected].
2Instituto Politécnico Nacional, Escuela Superior de Ingeniería Mecánica y Eléctrica Sección de Estudios de Postgrado e Investigación
Edificio Z-4, 1er. piso, Col. Lindavista- 07788 D. F. México Phone: +55 5729-6000 ext 54625 Email: [email protected], [email protected].
Abstract – The design of a synchrophasor based on a DSP-Microcontroller (C2000 family) is presented in this article. The standard temporal reference of this system is generated with a signal of 1 pulse per second (1PPS) from a Global Positioning System (GPS), this lets the measurement of the phase between two electrical signals that can be located far away one from the other. Synchrophasor is the acronym of synchronized phasor and it is a phasor measured and calculated by sampling with a standard temporal reference.
V1 δ1 V2 δ2 V3 δ3
Keywords –.Synchrophasor, DSP-Microcontroller.
I. INTRODUCTION
In the transmission of the electrical energy through the electrical network, the electical signal suffers a change on phase due to the electrical network, loads and energy flux.
The problems related to this is: To measure the change of phase that presents a single
electrical signal between two separete points. To measure the change of phase that present two different
electrical signals that are located far away. There is no problem to measure the amplitudes of two
electircal signals that are located far away from each other. This can be easily done measuring each signal with the same ground reference. The problem appears when the measurement is required to determine the phase between those signals because the we need a temporal reference.
With one instrument is possible to measure the phase in one electrical signal or between two electrical signals that are located near the instrument, because the measurements are taken with the same temporal reference of the instrument. This temporal reference given by the instrument is taken as soon as
the instrument is energized, it means that this reference is aleatory.
Due obvious reasons, it is impossible to measure two distant points with the same instrument. If we use two instruments (one for each remote signal) the reference will be different at each instrument and the measurement of the phase between those points will be impossible.
The problem related to measure the phase between two remote points (from the same signal or from different signals) can be solved synchronizing both instruments with the same temporal reference. This is explained in figure 1: in each node we can measure the amplitude V and the phase δ at the same time.
Fig. 1. Measurement’s synchronization.
Nowadays measuring the phasor with synchronization has more applications than just measuring the power flux [2,5], for example, it can be applied in protection relays and in the control of FACTS (Flexible AC Transmission Systems).
1-3 September, 2005 • Faro, Portugal
80 0-7803-9030-X/05/$20.00 ©2005 IEEE.
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:32 from IEEE Xplore. Restrictions apply.

A. Synchronization by GPS
The GPS system has 24 active satellites. The satellites describe orbits that let any point in the Earth to have “line sight” 24 hours a day with different satellites. The GPS system proportionate services as the position in geographical coordinates, the altitude above the sea, velocity and direction of a moving object, the magnetic derive in degrees, the time by the UTC (Universal Coordinated Time), the signal 1PPS and others [6].
A terrestrial GPS receives the signal from one or more satellites (for example, to calculate the geographical coordinates it is required the reception of the signal from three satellites). Once the receptor detects the signal with good strength from at least one satellite, it decodes the UTC and transmits it in synchronization with the 1PPS signal from each one of the instruments that measure the phasor (PMU) [2]. Each PMU uses the 1PPS signal to synchronize its own measurement system. After the measurement has done, the phasor is calculated and transmitted together with the UTC to a main processor which is responsible to calculate the difference of phase between each measured node. In figure 2 there is a block diagram that summarizes this process.
Fig. 2. Measurement system.
B. 1PPS Synchronization Signal
The 1PPS signal has a TTL level and is generated in the GPS receiver system. By omission, each time the receiver is energized, the 1PPS signal is generated even if the receiver doesn’t detect the signal from a satellite. Once the receiver
detects a satellite, the receiver synchronizes the rise time of the 1PPS with the reception of the UTC.
The 1PPS signal has a pulse width of 10 microseconds, the rise time takes usually less than 20 nanoseconds and a period of exactly one second ±100 nanoseconds. In the other hand, UTC is synchronized with a reference from a Cesium atomic clock of high stability that is contained in each satellite. The clock of each satellite is synchronized with a master clock, so each satellite sends the UTC signal at the same time. For any application where a GPS is required for synchronization, the rise time of the 1PPS signal has to be used because this is synchronized at each repetition of the UTC [6].
C. Measuring the Phase Angle
It is necessary to use the phase from one node as a reference to calculate the difference of phase between two or more nodes. This measurement is summarized in figure 3.
Fig. 3. Calculating the difference of phase between two nodes.
The procedure to calculate the difference of phase between two nodes is best described in the next steps:
• The 1PPS signal is received at the same time at each system.
• The phase angle between the measured signal and the 1PPS signal is calculated, this gives as a result the angles 1 and 2 (θ1 and θ2).
• Each system transmits the calculated angle and the specific time at which the measurement was done, to a main processor.
• The main processor calculates the difference of phase between each signal. If the system 1 (θ1) is used as the reference, the difference of phase with the signal 2 is δ2 = θ1-θ2.
Difference of phase = θ1 - θ2
1 PPS
Calculation of the phase angle
Main Proccesor
PMUn An,θn
PMU2 A2,θ2
PMU1A1,θ1
GPSn GPS2 GPS1
θ1
PMU 1
θ2
PMU 2
1-3 September, 2005 • Faro, Portugal
81
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:32 from IEEE Xplore. Restrictions apply.

D. Phasor Calculation
When calculating the phasor (amplitude and phase) of a signal, the DFT is applied to a group of samples obtained with a window of one period size.
The sinusoidal signal represented in its polar form is as shown:
A∠θ (1) and
( ) ( )22
ir ZZA += (2)
r
i
ZZ
arctan=θ (3)
The synchrophasor is based on a GPS ACE III from Trimble, a DSP TMS320LF2407 from Texas Instruments (TI) and a personal computer (PC). The GPS provides the 1PPS and the UTC signals to synchronize the measurements. The DSP calculates from each signal the amplitude and the angle with the 1PPS reference. The PC receives the angles and the amplitudes, makes a process, saves the results and sends the information to a server to publish the results on a web page. A remote PC receives the signals from the different locations to calculate the phase between each signal. To do this calculation the remote PC has to know the reference node, with the reference node and the UTC the remote PC calculates the phase angle between the signals that have the same UTC.
= ∑
−
= NnnX
NjZi
N
n
π2sin][2 1
0 (4)
[ ]∑
−
=
=
1
0
2cos2 N
n NnnX
NZr π
(5)
The GPS receiver use an asynchronous serial port to transmit the UTC and more data in a NMEA 0183 standard protocol (National Marine Electronics Association), (Trimble Navigation Limited, 2000). There are more protocols, but NMEA is the simplest and chipset protocol. It requires a one way communication only (simplex) and uses the ASCII code. Other protocols require a full duplex communication and software to interpret the binary code. In the other hand, the NMEA protocol is widely used by the GPS receivers. In figure 4 the block diagram of the system is shown.
Where X[n] are the samples and N is the number of samples obtained by the window in one period. For the implementation a minimum of 12 samples are required [2] and we implemented it with 16 samples. The calculation process is applied on the electrical system in each one of the three lines of 60 Hz (voltage and current).
The DSP TMS320LF2407 is a system from the C2000 family from TI. This family was one of the first to integrate a DSP of fixed point in a single chip (CI). This new generation of processors is known as a DSP microcontroller because it integrates the abilities of a DSP and a microcontroller. The system presented in this paper is cheap and this is due the use of the DSP microcontroller.
II. DESIGN OF THE INSTRUMENT In detail, in the figure 4 we can find that the Analog to Digital Converter (ADC) of 10 bits and 16 input channels is inside the DSP (only 6 channels are used on the system). The ADC is responsible to digitize the analog signals of current and voltage, which has been previously conditioned to give 0 to 3.3 volts (this is the range accepted by the ADC). The timer generates the sample period. 16 samples per period are required from each signal. The beginning of the acquisition is synchronized with the external interrupt signal (XINT1) which is generated from the 1PPS of the GPS. Also the baud rate (BR) is generated by the timer and requires a serial communication interface (SCI). At the RX pin, the DSP receives the UTC from the GPS. After the calculation of the phasor, the DSP at pin TX transmits the amplitude and the phase angle to the PC. In the communication between the DSP and the PC is required a circuit to generate the electrical levels that the RS232 requires.
The advantage of using a DSP-Microcontroller is that most of the systems required to calculate the synchrophasor are located together with the main processor embedded in a single chip [3] as shown in figure 4. This arrangement lets the development of very low cost circuits to calculate the synchrophasor.
. . .
Tx
Electric signals
. . .
Sensors and
signal setup
PC
GPS 1PPS
DIGITAL I/O
32K 32K Data Memory
Program Memory
Rx Tx
SCI
UART
ADC
10bits
16 Channels
Timer
OSC/PLL WD
DSP CPU INT
III. ALGORITHM
The development of the preprocessing consists in the preparation of a trigonometric function table in a format of integer numbers. This table contains the trigonometric values and the operations between the constants that are required to calculate the phasor. Fig. 4. Block diagram of a synchrophasor.
If we know the resolution and intervals required in a digital measuring equipment, then it is possible to develop the
WISP 2005
82
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:32 from IEEE Xplore. Restrictions apply.

necessary algorithms for an application with the minimum code length and also that requires the minimum time for processing.
TABLE I.
TABLE SIN AND TABLE COS The preprocessing is required to avoid that some
calculations are done several times. θ CteS Table sin CteC Table cos
n 2pn/16 1/8*sin(θ) CteS* 128 1/8*cos(θ) CteC*128
0 0.000000 0.000000 0 0.125000 16
1 0.392699 0.047835 6 0.115485 15
2 0.785398 0.088388 11 0.088388 11
3 1.178097 0.115485 15 0.047835 6
4 1.570796 0.125000 16 0.000000 0
5 1.963495 0.115485 15 -0.047835 -6
6 2.356194 0.088388 11 -0.088388 -11
7 2.748894 0.047835 6 -0.115485 -15
8 3.141593 0.000000 0 -0.125000 -16
9 3.534292 -0.047835 -6 -0.115485 -15
10 3.926991 -0.088388 -11 -0.088388 -11
11 4.319690 -0.115485 -15 -0.047835 -6
12 4.712389 -0.125000 -16 0.000000 0
13 5.105088 -0.115485 -15 0.047835 6
14 5.497787 -0.088388 -11 0.088388 11
15 5.890486 -0.047835 -6 0.115485 15
In the practice, usually there are different algorithms to solve one mathematical problem. When talking about synchrophasor [4], it is required an optimization of the algorithm to obtain: • Less time for processing. • Code length minimization. The minimization of the time for processing is not always
completely dependant to the minimization of the code length, it depends on the velocity of processing (MIPS) of the processor. Of course, a minimized algorithm will be always faster in any processor.
New embedded systems have a high scale of integration that lets discriminate the problem of memory requirement. DSP-Microcontrollers have this advantage.
IV. AMPLITUDE LOOK UP TABLE
If equation (4) is developed without taking care of the “j” operator, the next is obtained
[ ] ( ) [ ]
++=
16152sin...0sin
162
150πXXZi (6)
TABLE II.
AMPLITUDE CALCULATION.
[ ] ( ) [ ] ( 89.5sin81...0sin
81
150 XZXZi ++= ) (7)
Signal X[n]*Tablesin Zi/128 X[n]*Tablecos Zr/128 Amplitude
117 0 83 1872 111 139
130 796 1922
127 1437 1437
123 1818 753
96 1536 0
51 754 -312
-6 -68 68
-64 -392 946
-108 0 1728
-136 833 2010
-140 1584 1584
-117 1730 716
-76 1216 0
-25 370 -153
36 -407 407
85 -520 1256
The idea is to generate the table for the sinusoidal function
taking into account the operation with 1/8 and the multiplication with 2n to obtain an integer number by each product that also gives the desired resolution.
The idea of multiplying with 2n is that when we recover the original value dividing by 2n, this could be done with simple left rotations in case the microcontroller doesn’t have the division instruction.
E. Example to Generate the Table for sin(), cos() and the Amplitude
The minimum integer number “(1/8)*sin()*2n” is obtained with n = 7, then, the table can be done with n ≥ 7. Table I and II are examples obtained for n = 7.
V. ANGLE LOOK UP TABLE After A the amplitude is obtained, the values for ,
and rZ iZ
θ can be obtained applying different functions like arctan, arcsin or arccos. If we analyze the arguments of the three functions, / , /iZ rZ iZ A y /rZ A respectively varying the angle from 0 to 90°, the next is obtained:
1-3 September, 2005 • Faro, Portugal
83
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:32 from IEEE Xplore. Restrictions apply.

0 ≤ Z / rZ < ∞ (8) i but due QuoteInteger are cero numerator = remainder (12) 0 ≤ Z /i A ≤ 1 (9)
VI. TESTS AND RESULTS. 1 ≥ Z /r A ≥ 0 (10) The tests results obtained for the measurement of the
exactitude in the amplitude and phase are presented. Also the analysis of the processing time to obtain the angle is presented. This angle is obtained through the revision between the values obtained with the use of the Taylor series.
The argument of arctan function (8) has discontinuities that are difficult to implement in a fixed point DSP, while the arcsin function (9) and the arcos function (10) give results between 0 and 1. Because of this, the arcsin function is the most appropriate to generate a LUT. Special emphasis to the use of the DSP-Microcontroller and
to the use of the computational algorithm is given in this article. Due this emphasis, the presented results were done without the use of the “Sensors and Signal Setup” block (fig.4). A function generator was used to provide the electrical signals to the ADC, and an oscilloscope was used to check the measurements.
F. Procedure to Develop the arcsin Table
Taking into account that division operations in assembler language generate two results (quotient and remainder) it is possible to develop a table to obtain the angle with any of the two results. As it is shown, all the QuoteInteger from the relation /iZ A are 0 (except when = iZ A ) then, the idea is to generate a group of quotients in fractions from 0 to 1 which remainders are integer numbers that can be used as pointers of the table. The next procedure is proposed:
G. Amplitude Tests.
The system was designed to be used with distribution lines of electrical energy of 220 Vrms. Considering a 20% of over voltages, the maximum range is 264 Vrms or 374 Vpp, in other words, the maximum range for the equipment is 748 Vpp. The 10 bit ADC lets the correct measurement of a signal of 1023 Vpp with a resolution of 1 V. A resolution of 1 V is the required parameter, then the instrument range is from 0 V to 511 Vp. In figure 5 is shown a graph of the difference between the input voltage and the measured voltage.
1. The size of the table is determined; it means that
for the number of steps required depends on the resolution of the angle that is required. For example, if the pointer register has 8 bits, the table will have 256 steps (from 0 to 255); this doesn’t mean that the resolution will be 1/255° because the relation /iZ A takes values from the sinusoidal.
2. A list of 256 quotients is generated from 0 to 1 with integer remainders from 0 to 255. This list has the form: 0, 1/255, 2/255, … , 255/255.
Table III shows an example of a portion of the table for 256
steps.
TABLE III.
ARCSIN TABLE
remainder Quote θ= Arcsin(n/255) Radians
θ Grades
0 0 0 0
1 0.00392157 0.00392158 0
2 0.00784314 0.00784322 0
3 0.01176471 0.01176498 1
255 0.99999999999997 1.5707962 90
0
0.5
1
1.5
2
2.5
0 100 200 300 400 500 600
Voltage in volts
Diff
eren
ce in
vol
ts
Fig. 5. Magnitude difference. The maximum error in the range was of 2 V, which is a
0.39% of the total range, and this is acceptable for this application. The results were the expected, considering the quantization errors from the ADC (± 1/2 LSB) and the rounding
From the arithmetic algorithms required for the division it is
possible to demonstrate that for this case the remainder is equal to the numerator.
numerator = denominator*QuoteInteger + remainder (11)
WISP 2005
84
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:32 from IEEE Xplore. Restrictions apply.

H. Angle Test where z = Zi/Zr To obtain a precision of 2 degrees near of 45 degrees, the
series is extended until the z5/5 term. This implies at least 10 operations and in the best cases the same number of cycles.
With and exact frequency of 60.00000 Hz, the 1PPS is always in the same position with respect to the signal that will be measured. To move the relative position between both signals, it was necessary to make a little variation in the frequency signal (towards or backwards, 60.00001 Hz for example). Once the signals are in the required position, the frequency is readjusted to 60.00000 Hz to make the measurement.
Using the arcsen function and the LUT here proponed, the operations are reduced to:
• Zi/A => cero QuoteInteger and remainder. • remainder => data memory addressing => one
cycle. In figure 6 is shown the graph of the difference between the angle measured in the oscilloscope and the angle measured with the developed instrument. Those tests were captured in two tables, one in 255 steps and the other in 1023 steps.
• TBLR (table read) => three cycles. The algorithm with the LUT is realized in four machine
cycles in a DSP.
0
0.5
1
1.5
2
2.5
3
3.5
60 70 80 90
Degrees
Diff
eren
ce in
deg
rees
255 Steps
1023 Steps
CONCLUSION
The use of look up tables let realize the phasorial measurement of a signal of 60 Hz using microcontrollers or fixed point DSP-Microcontrollers.
The processing time of the algorithm is reduced notoriously due to the elimination the use of power series in the calculus of trigonometric functions.
Depending on the resolution that is required, the size of the tables can be bigger. For the applications of a synchrophasor where it is required a resolution of 1 degree for the angle, a table of 8 bits (256 steps) is enough.
REFERENCES
[1] Martin, K. E.; Benmouyal G.; Adamiak, M. G.; Begovic, M.; Burnett, R.O., Jr.; Carr, K. R.; Cobb, A. Kusters, J. A.; Horowitz, S. H.; Jensen, G. R.; Michel, G. L.; Murphy, R.J.; Phadke, A. G..; Sachdev, M.S.; Thorp, J.S. “IEEE standard for synchrophasors for power systems”. IEEE Transactions on Power Delivery, Vol. 13, No. 1, January 1998
Fig. 6. Angle difference. The maximum angle error was of 2 degrees (1023 steps
table), which is a 2.2% of the total range. This is acceptable for the application. The error in angles near 90 degrees can be reducing by using a bigger table
[2] Phadke, A. G. “Synchronized phasor measurements, Chapter 6. IEEE Tutorial Course”, Advancements in microprocessor based protection and communication.1997
[3] Texas Instrument. “TMS320LF/LC240xA DSP Controllers Reference Guide System and Peripherals” Dallas, Texas 75265. Revised December 2001
I. Temporal Analysis of the Algorithm.
[4] Electric Power Research Institute, IECASA Team “Intelligrid use case SynchroPhasor Domain Description” Intelligrid Architecture Volume II. Palo Alto, California 94304 USA. 2004
A high speed of processing gives better characteristics to the instrument in applications of protection and control
As was mentioned before, the processing time of any algorithm depends on the MIPS of the processor, but the algorithm that uses less number of instructions will be the faster. The angle calculation is realized by the use of the arctan Taylor series.
[5] Anderson, Chris, Fearn, Brian, Guzmán, Armando, Moxley, Roy.“Using SEL-421 relay synchrophasors in basic applications.” SEL Application Guide, Vol. 1. 2003
[6] Trimble Navigation Limited. “ACE III GPS™ System Designer Reference Manual.” Sunnyvale, CA. 2000
( ) 1;...53
tan53
1 ⟨−+−=− zzzzz (13)
1-3 September, 2005 • Faro, Portugal
85
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:32 from IEEE Xplore. Restrictions apply.

Abstract— An algorithm based on the angle variations of the
current phasor under failure conditions is presented. The current phasor is calculated with the recursive algorithm of the Discrete Fourier Transform (RDFT). The behavior of the phasor’s angle is analyzed under frequency variations according to the standard (±0.5Hz or 0.8% of the nominal frequency). Also the behavior of the phasor’s angle is analyzed under failure conditions, simulating different faults in different instants of the sinusoidal waveform of the current. Finally, the obtained algorithm is presented.
Index Terms—Discrete Fourier transforms, RDFT, Protective relaying, Fault currents.
I. INTRODUCTION
or a quick failure detection (in less than a quarter of a period), the principal problem is the evidence because it will be different every time is presented. For example, if
the failure occurs when the waveform is decreasing, (after the positive peak) the measured samples of the signal will be very similar to the typical signal [1], [2], [3].
Under normal conditions of operation, the voltage and current signals will be similar to a sinusoidal waveform. On the other hand, when a failure or disturbance is presented, many transients are generated and the frequency spectrum will be different [4]. Many studies have been developed to analyze the difference between the angles of the three phases when a failure is presented [5]. Many studies have been developed to analyze the difference between the angles in different nodes of a network when a failure is presented [6]. This paper proposes the detection of the failure by means of the angular difference sample to sample between the phase angles of the failure signal and the same signal one period before the fault.
To measure sample to sample the phase difference of a signal, it is used the recursive algorithm of the DFT (RDFT). The RDFT is the most tested algorithm [4], [7]. The real and imaginary components are calculated with the next equations:
( )−+= −− NkXX
NXX Nkkrkrk
π2cos21
(1)
( )−+= −− NkXX
NXX Nkkikik
π2sin21
(2)
II. ACTUAL SITUATION
In an electrical energy system, the frequency of the voltage at different points is quiet different and always changes, therefore, an error in the phasor calculation around 60 Hz is presented. This is due the sampled data in the time window of fixed width do not correspond to an entire cycle of the waveform and does not satisfy the signal periodicity conditions of the Fourier transform [8].
As shown in Figure 1, for a frequency variation from 59 Hz to 61 Hz, an error in the phase of less than ±10 degrees is presented. Then, under normal conditions of operation in an electrical network, a phase difference of less than 10 degrees between period to period should be presented. This is because for standards, the maximum frequency variation in an electrical network is ±0.5 Hz (0.8% of the nominal frequency).
Figure 2 shows the phase error period to period in a signal of 5 periods that varies upwards and downwards 0.1 Hz in frequency, from 59.8 Hz to 61.2 Hz. In this figure is observed a maximum phase error of 3.5 degrees. Every time there are little phase angle variations, but when a failure is presented, the variations are more evident, this is shown in the next section.
Algorithm for Instant Overcurrent Relays Based on the Angle Variations of Current Phasor
Rafael San Vicente1, 2, Raúl Cortés2, Jaime Robles2, J. Enrique Chong-Quero1
1 Instituto Tecnológico y de Estudios Superiores de Monterrey, Campus Estado de México, México 2Instituto Politécnico Nacional, Escuela Superior de Ingeniería Mecánica y Eléctrica, D.F. México
F
Fig. 1. Phase and amplitude error presented when the frequency of the signal is different from 60 Hz (from [9]).
-3-2-10123
0 0.02 0.04 0.06 0.08time [seg]
Phas
e er
ror [
°]
Fig. 2. Phase error in a signal with variations from 59.8 Hz to 60.2 Hz.
978-1-4244-1706-3/08/$25.00 ©2008 IEEE.
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 10:47 from IEEE Xplore. Restrictions apply.

III. ALGORITHM
In a transmission line, under normal conditions of operation, signals change slowly, each moment, a period of a signal is similar to one period before. Then, comparing the phase difference of the signal under failure conditions, with the phase difference that should be expected (one period before), it is possible to detect the failure in the first sample after the failure is presented.
The difference in the angles period to period is given by:
= k – k-N (3)
If the angles are calculated sample to sample and the differences are calculated, the values will be normal until a failure is presented, as is shown in figure 3 (the criterions that determine if an angle difference is normal will be presented next).
In section IV, calculations of the angular differences in a failure to typical ground [1], [2], [3] are plotted. The calculations for failures at different instants (angles) in a normal signal are presented. Doted lines mark out the signals to one quarter of the period after the failure. In Figure 6 the angular difference period to period is presented and also other rates are presented, like the difference of the differences period to period, the angular difference sample to sample and the difference of the differences sample to sample. It is shown that the angular difference period to period is the one that presents more differences when a failure is presented.
Variations of the amplitude percentage at different instants of the failure are presented in Table 1 and Figure 5. Making the same experiment shown in section IV, but with different variations of the percentage of the amplitudes during failure, the values presented in Table 1 are obtained and plotted in Figure 4. The values presented in Table 1 are obtained measuring the maximum angular variations presented in less than a quarter of one period of the signal.
As it can be seen, angular variations are minimized at the angular instants of 45, 135, 225 y 315 degrees, which are the instants when the signal is at the half of the ascending waveform and at the half of the descending waveform at each semicycle; but, these variations are considerably bigger to the normal variations presented in a signal without failure and in operation with minimum frequency variations (59.5 to 60.5 Hz) [9], Figure 5.
IV. SIMULATION
The variations of the angular differences at different moments of the failure are presented in this section. The doted vertical lines remark one quarter of the period after the failure happens.
1θ 1θ ′ 2θ ′2θ 3θ 3θ ′
1’ – 1 => Normal 2’ – 2 => Normal 3’ – 3 => Abnormal
Fig. 3. Angular difference period to period.
TABLE IANGULAR DIFFERENCE
0 1.1 1.8 3.2 4.6 5.9 11.2 15.1 18.0 20.4 21.3
22.5 1.6 1.6 3.1 4.3 5.3 9.5 12.3 14.2 15.7 16.2
45 2.1 2.5 2.8 3.4 3.8 5.6 7.1 8.3 9.4 9.8
67.5 2.1 2.5 2.8 3.4 3.8 5.6 7.1 8.3 17.2 17.9
90 3.4 4.9 6.4 7.7 9.0 14.1 17.8 20.6 22.9 24.0
112.5 0.8 2.3 3.7 5.0 6.2 11.2 14.9 17.7 19.8 20.7
135 0.5 0.8 1.2 1.7 2.5 5.1 7.4 9.2 10.9 11.8
157.5 1.3 2.2 3.3 4.4 5.4 10.2 14.3 17.8 20.8 21.9
180 1.5 3.0 4.5 5.9 7.2 12.4 16.3 19.3 21.6 22.3
202.5 1.5 2.7 4.0 5.2 6.3 10.5 13.3 15.2 16.7 17.3
225 2.0 2.4 2.8 3.2 3.6 5.4 6.8 8.0 9.0 9.4
247.5 2.7 3.7 4.7 5.7 6.6 10.2 13.0 15.6 16.9 17.5
270 3.2 4.7 6.1 7.4 8.6 13.6 17.2 20.0 22.2 23.3
292.5 3.2 4.8 6.3 7.6 8.9 14.0 17.7 20.5 23.0 24.2
315 2.3 3.1 3.8 4.5 5.2 8.2 10.7 12.8 14.6 15.7
337.5 1.1 0.8 2.0 3.1 4.1 8.9 13.0 16.5 19.5 20.7
Failu
re’s
Inst
ant
[º]
1.2 1.4 1.6 1.8 2.0 3.00 4.00 5.00 6.00 6.45
% of amplitude variation
% of amplitude variation
0
10
20
30
0 45 90 135 180 225 270 315Failure’s Instant [ º ]
Angular Difference [ º ]
1.2 1.4 1.6 1.8 2 3 4 5 6 6.45
h
Fig. 4. Differentiates of the angles period to period with different amplitudes and in different instants
05
1015202530
0 50 100 150 200 250 300 350Failure instant [°]
Ang
ular
Diff
eren
ce [°
]
6.45% of amplitude variation Maximum normal variationl
Normal phase angle i i
Failure zone
Tolerance zone
Fig. 5. Zones of angular variation period to period with a failure of the 6.45% of amplitude.
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 10:47 from IEEE Xplore. Restrictions apply.

V. CONCLUSION
It is possible to detect an electrical failure by measuring the angular difference of the phase between a signal with failure and a normal signal (the same current signal one period before).
As more samples per period are obtained and more powerful algorithms are developed to calculate phasors on line between sample to sample; it will be possible to detect failures on real time if measurements are correctly executed
If the frequency variations are by up of the standard, the algorithm will detect a fault and there will not be a difference between amplitude failure and frequency failure.
REFERENCES
[1] E.C. Senger, G. Manassero Jr, C. Goldemberg, and E. Lorenzetti Pellini “Automated Fault Location System for Primary Distribution Networks,” IEEE Transactions on Power Delivery, Vol. 20, No. 2, April 2005
[2] SEL-311A Data Sheet Schweitzer Engineering Laboratories, Inc. Event Reporting and Sequential Events Recorder (SER).
[3] G. Benmouyal and A. Guzmán “Synchronized Phasor Measurement in Protective Relays for Protection, Control, and Analysis of Electric Power Systems,” 29th Annual Western Protective Relay Conference Spokane, Washington October 22-24, 2002
[4] T.S. Sidhu, X. Zhang, F. Albasri and M.S. Sachdev, “Discrete-Fourier-transform-based technique for removal of decaying DC offset from phasor estimates,” TEE hoc.-Gner, Tw Dlrrr&. Vol. 150, No. 6, Nowdm 2003
[5] M.S. Sachdev, T.S. Sidhu, I. Uttamchandani and W.O. Kennedy “Design of Phase and Amplitude Comparators for Transmission Line Protection,” 1991 Conference on Communications. Power and
Amplitude
-8
0
890º
time
-30
-5
20
¼ T90º
time
Amplitude
-8
0
845º
-30
-5
20
45º
time
time
Amplitude
-8
0
8315º
time
-30
-5
20
315º
time
Amplitude
-8
0
8270º
time
-30
-5
20
270º
time
Fig. 7. Angular variation when the failure is presented between 90 and 270 degrees.
-30
-10
10
Time [seg]
[°] Angular Difference
Difference of the differences sample to sampleDifference sample to sampleDifference period to periodDifference of the differences period to period
Fig. 6. Different angular relations are shown. The angular difference period to period is the one that presents more differences when a failure is presented
Amplitude
-8
0
8225º
time
-30
-5
20
225º
time
Amplitude
-8
0
8180º
time
-30
-5
20
180º
time
Amplitude
-8
0
8135º
time
-30
-5
20
135º
time
Fig. 8. Angular variation when the failure is presented between 225 and 135 degrees
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 10:47 from IEEE Xplore. Restrictions apply.

Computing, WESCANEX'97 Proceedings; Winnipeg, MB; May 22-23, 1997; pp. 179-184
[6] A. Guzman, S. Samineni, and M. Bryson, “Protective Relay Synchrophasor Measurements during Fault Conditions,” Schweitzer Engineering Laboratories, Inc. Copyright © SEL 2005 (All rights reserved) 20050920 TP6214-01
[7] V. Madisetti and D.B Williams, The Digital Signal Processing Handbook, CRC Press, B m Raton, FL, 1997
[8] Y. Xu, and B. Ju “Synchronized phasor measuring method using recursive DFT with a window function,” 2005 IEEE/PES transmission and Distribution Conference & Exhibition Asia and Pacific, Dalian, China.
[9] Z. Zhong, C. Xu, B.J. Billian, L. Zhang, S.S. Tsai, R.W. Conners, V.A. Centeno, A.G. Phadke and Y. Liu, “Power System Frequency Monitoring. Network (FNET) Implementation,” IEEE Transactions on Power Systems, Vol. 20, No. 4, November 2005
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 10:47 from IEEE Xplore. Restrictions apply.

Abstract –– Synchrophasor is the acronym of synchronized
phasor and it is a phasor measured and calculated by sampling
with a standard temporal reference. The utility of a
synchrophasor is to measure the angle of phase between two
electrical signals placed in remote nodes. In the article is
expressed the computational algorithm to calculate the phasor
of the fundamental component (60 Hz) of an electrical signal.
This algorithm is implemented with the Discrete Fourier
Transform (DFT) and a Look Up Table (LUT) which in
junction lets diminish the process time. It is also presented an
algorithm which uses the same technique to obtain the inverse
trigonometric function that is required to calculate the phase
angle. The full algorithm presented in this paper was
implemented in a DSP-Microcontroller, fixed point from
C2000 family. The Standard temporal reference is generated
with a signal of 1 pulse per second (1PPS) from a Global
Positioning System (GPS).
Keywords –– DSP-Microcontroller, Synchrophasor, Look
up table
I. INTRODUCTION
IEEE 1344 Standard [1] defines a phasor as the complex
equivalent in polar form of a sinusoidal signal in which the
complex module is the amplitude and the angle is the phase
of the sinusoidal signal. In the same Standard,
synchrophasor is the acronym of synchronized phasor and it
is a phasor measured and calculated by sampling with a
standard temporal reference.
When calculating the phasor (amplitude and phase) of a
signal, the DFT is applied to a group of samples obtained
with a window of one period size [2]. The sinusoidal signal
represented in its polar form is as shown:
A∠θ (1)
and
( ) ( )22ir ZZA +=
(2)
r
i
Z
Zarctan=θ
(3)
= ∑
−
=N
nnX
NjZi
N
n
π2sin][
21
0 (4)
[ ]∑−
=
=
1
0
2cos
2N
nN
nnX
NZr
π
(5)
Where [ ]nX are the samples and N is the number of
samples obtained by the window in one period. For the
implementation a minimum of 12 samples are required [2]
and we implemented it with 16 samples. The calculation
process is applied on the electrical system in each one of the
three lines of 60 Hz (voltage and current).
The problem consist in the implementation of the
equations (2) to (4) with the minimum code length in a DSP-
Microcontroller of fixed point, in which usually it is only
possible to develop arithmetic instructions like plus, minus,
multiplication and division.
II. METHODOLOGY
The computational algorithm presented was
implemented in the TMS320F247 DSP-Microcontroller
from the C2000 family of Texas Instrument. The use of a
preprocessing algorithm based on Look Up Tables (LUT) is
important. These tables contain the trigonometric values and
the operations between the constants that are required to
calculate the phasor [5].
1) Hardware development: The advantage of using a
DSP-Microcontroller is that most of the systems required to
calculate the synchrophasor are located together with the
main processor embedded in a single chip [3] as shown in
figure 1. This arrangement lets the development of very low
cost circuits to calculate the synchrophasor The GPS
generates a signal of one pulse per second (1PPS), which is
DSP-Microcontroller Implementations of a Simplified Algorithm for
Synchrophasor Calculation
Rafael San Vicente1, 2
, Raúl Cortés2, Jaime Robles
2, J. Enrique Chong-Quero
1
1 Instituto Tecnológico y de Estudios Superiores de Monterrey, Campus Estado de México
Carretera Lago de Guadalupe Km 3.5 Col. M.M. Juárez 52926 Edo de Mex México
Phone: +55 5864-5555 ext 2485, E-mail: [email protected], [email protected]. 2Instituto Politécnico Nacional, Escuela Superior de Ingeniería Mecánica y Eléctrica
Sección de Estudios de Postgrado e Investigación
Edificio Z-4, 1er. piso, Col. Lindavista- 07788 D. F. México
Phone: +55 5729-6000 ext 54625 E-mail: [email protected], [email protected].
2nd International Conference on Electrical and Electronics Engineering (ICEEE) and XI Conference on Electrical Engineering (CIE 2005)
Mexico City, Mexico. September 7-9, 2005
IEEE Catalog Number: 05EX1097
ISBN: 0-7803-9230-2
0-7803-9230-2/05/$20.00 ©2005 IEEE.
408
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:37 from IEEE Xplore. Restrictions apply.

delivered to all the synchrophasors at the same time. With
the 1PPS, the synchrophasors calculate the phasor. The GPS
also sends the actual hour to the DSP through the Rx pin
with a resolution of one second. Once the pashor is
calculated, it is transmitted with the hour to a remote
personal computer (PC) through the Tx pin to calculate the
difference of phase between all the signals transmitted from
the synchrophasors.
Fig. 1. Block diagram of synchrophasor.
2) algorithm development: The preprocessing
algorithm consist in the preparation of a table that contains
the integer values of some trigonometric functions and the
results of some operations that are used in the calculation of
the phasor.
If we know the resolution and intervals required in
digital measuring equipment, then it is possible to develop
the necessary algorithms for an application with the
minimum code length and also that requires the minimum
time for processing. The preprocessing is required to avoid
that some calculations are done several times.
In the practice, usually there are different algorithms to
solve one mathematical problem. When talking about
synchrophasor [4], it is required an optimization of the
algorithm to obtain:
• Less time for processing.
• Code length minimization.
The minimization of the time for processing is not
always completely dependant to the minimization of the
code length, it depends on the velocity of processing (MIPS)
of the processor. Of course, a minimized algorithm will be
always faster in any processor. New embedded systems have
a high scale of integration that lets discriminate the problem
of memory requirement. DSP-Microcontrollers have this
advantage.
III. RESULTS
A. Look Up Table Amplitude
If equation (4) is developed without taking care of the “j”
operator, the next is obtained
[ ] ( ) [ ]
++=
16
152sin...0sin
16
2150
πXXZi (6)
[ ] ( ) [ ] ( )89.5sin8
1...0sin
8
1150 XXZi ++= (7)
The idea is to generate the table for the sinusoidal
function taking into account the operation with 1/8 and the
multiplication with 2n to obtain an integer number by each
product that also gives the desired resolution.
The idea of multiplying with 2n is that when we recover
the original value dividing by 2n, this could be done with
simple left rotations in case the microcontroller doesn’t have
the division instruction.
B. Example to Generate the Table for sin(), cos() and the
Amplitude
The minimum integer number “(1/8)*sin()*2n” is
obtained with n = 7, then, the table can be done with n ≥ 7.
Table I and II are examples obtained for n = 7.
TABLE I
TABLE SIN AND TABLE COS
θ CteS Tablesin CteC Tablecos
n 2pn/16 1/8*sin(θ) CteS* 128 1/8*cos(θ) CteC*128
0 0.000000 0.000000 0 0.125000 16
1 0.392699 0.047835 6 0.115485 15
2 0.785398 0.088388 11 0.088388 11
3 1.178097 0.115485 15 0.047835 6
4 1.570796 0.125000 16 0.000000 0
5 1.963495 0.115485 15 -0.047835 -6
6 2.356194 0.088388 11 -0.088388 -11
7 2.748894 0.047835 6 -0.115485 -15
8 3.141593 0.000000 0 -0.125000 -16
9 3.534292 -0.047835 -6 -0.115485 -15
10 3.926991 -0.088388 -11 -0.088388 -11
11 4.319690 -0.115485 -15 -0.047835 -6
12 4.712389 -0.125000 -16 0.000000 0
13 5.105088 -0.115485 -15 0.047835 6
14 5.497787 -0.088388 -11 0.088388 11
15 5.890486 -0.047835 -6 0.115485 15
DSP CPU INT
OSC/PLL
WD
Timer
ADC
10bits
16
Channels
Rx
Tx
SCI
UART
Program
Memory
Data
Memory 32K 32K
Digital I/O
GPS
PC
Sensors and
signal
setup
.
.
.
Electric
signals
Tx 1PPS
.
.
.
IEEE Catalog Number: 05EX1097
ISBN: 0-7803-9230-2 409
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:37 from IEEE Xplore. Restrictions apply.

TABLE II
AMPLITUDE CALULATION
Signal X[n]*Tablesin Zi/128 X[n]*Tablecos Zr/128 Amplitude
117 0 83 1872 111 139
130 796 1922
127 1437 1437
123 1818 753
96 1536 0
51 754 -312
-6 -68 68
-64 -392 946
-108 0 1728
-136 833 2010
-140 1584 1584
-117 1730 716
-76 1216 0
-25 370 -153
36 -407 407
85 -520 1256
C. Look Up Table Angle
After A the amplitude is obtained, the values for Zr, Zi
andθcan be obtained applying different functions like arctan,
arcsin or arccos. If we analyze the arguments of the three
functions, Zi/Zr, Zi /A and Zr /A respectively varying the
angle from 0 to 90°, the next is obtained:
0 ≤ iZ / rZ < ∞ (8)
0 ≤ iZ / A ≤ 1 (9)
1 ≥ rZ / A ≥ 0 (10)
The argument of arctan function (8) has discontinuities that
are difficult to implement in a fixed point DSP, while the
arcsin function (9) and the arcos function (10) give results
between 0 and 1. Because of this, the arcsin function is the
most appropriate to generate a LUT.
D. Procedure to Develop the Arcsin Table
Taking into account that division operations in assembler
language generate two results (quotient and remainder) it is
possible to develop a table to obtain the angle with any of
the two results. As it is shown, all the QuoteInteger from the
relation iZ / A are 0 (except when iZ = A ) then, the idea
is to generate a group of quotients in fractions from 0 to 1
which remainders are integer numbers that can be used as
pointers of the table. The next procedure is proposed:
1. The size of the table is determined; it means that for
the number of steps required depends on the
resolution of the angle that is required. For example,
if the pointer register has 8 bits, the table will have
256 steps (from 0 to 255); this doesn’t mean that the
resolution will be 1/255° because the relation Zi /A
takes values from the sinusoidal.
2. A list of 256 quotients is generated from 0 to 1 with
integer remainders from 0 to 255. This list has the
form: 0, 1/255, 2/255 … 255/255.
Table III shows an example of a portion of the table for
256 steps.
TABLE III
TABLE OF ARCSIN
Remainder Quote θ= ArcSin(n/255)
Radians θ
Grades
0 0 0 0
1 0.00392157 0.00392158 0
2 0.00784314 0.00784322 0
3 0.01176471 0.01176498 1
255 0.99999999999997 1.5707962 90
From the arithmetic algorithms required for the division
it is possible to demonstrate that for this case the remainder
is equal to the numerator.
numerator = denominator*QuoteInteger + remainder (11)
but due QuoteInteger are cero
numerator = remainder (12)
E. Comparative Analysis with Industrial Equipment
The results of a comparative test performed with 4
industrial synchrophasors are presented in [6]. The principal
parameters in these tests are the amplitude and phase errors,
these parameters are compared with the errors obtained with
the equipment presented in this article. The results of the
amplitude errors obtained in [6] are presented in figure 2.
The synchrophasors A, C and C in the operation range of
80% to 120% shows an error between 0.02% and 0.08%. In
the same range, the average error of the synchrophasor
presented in this article shows an error of 0.024%, as it is
shown in figure 3.
For the detection of the phase error in [6] the authors
used a function generator and an oscilloscope. The
synchronization between 1PPS and the voltage signal
performed in [6] is shown in figure 4. The pulse per second
signal and the signal move slightly varying the frequency in
the function generator from 60.0000 Hz to 60.0001 Hz. The
results obtained with the synchrophasor presented in this
article, it is shown in figure 5.
IEEE Catalog Number: 05EX1097
ISBN: 0-7803-9230-2 410
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:37 from IEEE Xplore. Restrictions apply.

0
0.01
0.02
0.03
0.04
0.05
0 20 40 60 80 100 120 140
Voltage %
The errors appear in the vicinity of the 90° is due the
LUT and those can be minimized augmenting the size of the
table. The average error in all the range of measurements is
0.14% which is appropriate for transmission lines
applications.
Fig. 2. Magnitude errors for balanced three phase voltage at nominal frequency (from [6]).
Fig. 3. Magnitude error.
Fig. 4. 1 PPS pulse and voltage signal synchronization (from [6]).
0
1
2
3
75 80 85 90 95 100
Degrees
Err
or
%
Fig. 5. Angle error.
V. CONCLUSION
The use of the LUT let the calculation of the phasor through
the DFT with a fixed point processor and with the minimum
of instructions. With the minimization of instructions it was
possible to reduce the processing time. With the reduction of
the processing time it is possible to use the synchrophasor in
other applications running together. For example, to locate a
failure in the transmission line. The development presented
in this article is cheaper than the commercial equipments in
less than 80%. This cost saving is due the use of only one
fixed point processor.
REFERENCES
[1] Martin, K. E.; Benmouyal G.; Adamiak, M. G.; Begovic, M.; Burnett,
R.O., Jr.; Carr, K. R.; Cobb, A. Kusters, J. A.; Horowitz, S. H.;
Jensen, G. R.; Michel, G. L.; Murphy, R.J.; Phadke, A. G..; Sachdev,
M.S.; Thorp, J.S. “IEEE standard for synchrophasors for power systems”. IEEE Transactions on Power Delivery, Vol. 13, No. 1,
January 1998
[2] Phadke, A. G. “Synchronized phasor measurements, Chapter 6. IEEE Tutorial Course”, Advancements in microprocessor based protection
and communication.1997
[3] Texas Instrument. “TMS320LF/LC240xA DSP Controllers Reference Guide System and Peripherals” Dallas, Texas 75265. Revised
December 2001
[4] Electric Power Research Institute, IECASA Team “Intelligrid use case SynchroPhasor Domain Description” Intelligrid Architecture
Volume II. Palo Alto, California 94304 USA. 2004
[5] San Vicente, R.; Cortés, R.; Robles, J.; Chong-Quero, J.E. “Synchrophasor Design Based on a DSP-Microcontroller” IEEE
International Symposium on Intelligent Signal Processing
(WISP’2005), in press. [6] Depablos, J.; Centeno, V.; Phadke, A.G.; Ingram, M. ”Comparative
testing of synchronized phasor measurement units” Power
Engineering Society General Meeting, 2004. IEEE 6-10 June 2004 Page(s):948 – 954, Vol.. 1
IEEE Catalog Number: 05EX1097
ISBN: 0-7803-9230-2 411
Authorized licensed use limited to: Tec de Monterrey. Downloaded on December 11, 2008 at 11:37 from IEEE Xplore. Restrictions apply.

LACCET’2005 – Energy Track – Paper No. 008 1
Third LACCEI International Latin American and Caribbean Conference for Engineering and Technology (LACCET’2005) “Advances in Engineering and Technology:A Global Perspective”, 8-10 June 2005, Cartagena de Indias, COLOMBIA Construcción de un sincrofasor de bajo costo basado en un DSP-Controlador
A. R. San Vicente Cisneros , PhD Student.
Profesor Consultor, Instituto Tecnológico y de Estudios Superiores de Monterrey CEM, México. PhD Student, Instituto Politécnico Nacional ESIME SEPI, México.
R. A. Cortés Mateos, PhD. Profesor Investigador, Instituto Politécnico Nacional ESIME SEPI, México.
J. Robles García, PhD. Profesor Investigador, Instituto Politécnico Nacional ESIME SEPI, México.
J. E. Chong Quero, PhD. Profesor Investigador, Instituto Tecnológico y de Estudios Superiores de Monterrey CEM, México.
[email protected] Resumen Según el estándar IEEE 1344 un fasor es el equivalente complejo, en forma polar de una señal senoidal en donde el módulo del complejo es la amplitud de la senoide y el ángulo es el desfase de la senoide. En el mismo estándar, sincrofasor es el acrónimo de fasor sincronizado y es un fasor medido y calculado mediante muestreos con una referencia temporal estándar. Se presenta el diseño de un sincrofasor basado en un DSP-Microcontroladore de la familia C2000 y cuya referencia temporal estándar se genera con la señal un pulso por segundo (1PPS) de un Sistema de Posicionamiento Global (GPS), de tal forma que, se pueden medir ángulos de desfase de señales eléctricas ubicados en nodos de una red eléctrica geográficamente remotos. En un sistema de distribución de energía eléctrica, la medición del fasor de los voltajes y corrientes son de importancia ya que con esta medición se pueden conocer los consumos de energía, las pérdidas de energía en una línea de transmisión y los flujos de potencia entre otros parámetros. Y además entre otras aplicaciones, la medición del sincrofasor también es requerida por los relevadores de distancia y protección en un sistema eléctrico de potencia. Palabras clave Sincrofasor, DSP-Microcontrolador. 1. Introducción

LACCET’2005 – Energy Track – Paper No. 008 2
En la transmisión de energía eléctrica a través de líneas de transmisión y de otros elementos de la red eléctrica, se producen desfases de las señales de corriente y de voltaje. Estos defasamientos se deben a las cargas y a los flujos de energía. 1.1 Planteamiento del problema El problema consiste en:
• Poder medir el desfase que presenta una misma señal eléctrica en dos puntos distantes. • Poder medir el desfase entre dos señales eléctricas diferentes que se encuentran en dos puntos
remotos. La medición de las amplitudes en las señales eléctricas distantes resulta sencilla ya que en estos casos los voltajes se miden con la misma referencia de voltaje que es tierra o cero volts. Para el caso de la medición del desfase se requiere también de una misma referencia, pero en este caso es temporal. Con un mismo instrumento se pueden medir el desfase de una misma señal o de dos señales diferentes de manera local, ya que ambas señales se están midiendo con la misma referencia temporal del propio instrumento. Esta referencia temporal que genera el instrumento esta únicamente referenciada con el tiempo en que fue energizado, es decir que, es aleatoria. Por razones obvias, para el caso de dos puntos remotos resulta imposible medir con el mismo instrumento. Si se utilizan dos instrumentos diferentes cada una de las señales remotas quedaran referenciadas temporalmente a su propio instrumento es decir a un punto aleatorio. Por lo tanto, resulta imposible la medición. Partiendo de los razonamientos anteriores, el problema de medir el desfase en dos puntos remotos ya sea de la misma señal o de señales diferentes, se reduce a poder sincronizar ambos instrumentos con la misma referencia temporal. Es decir realizar una medición sincronizada del fasor como se puede apreciar en la figura 1, en donde, en cada nodo se hace una medición de amplitud V con un ángulo de fase δ en el mismo instante de tiempo.
Figura 1: Sincronización de la medición Además de la medición de flujos de potencia, la medición sincronizada del fasor tiene actualmente diversas aplicaciones (Anderson et al., 2003. Phadke, 1997), entre otras, en relevadores de protección y en el control de FACTS (Flexible AC Transmission Systems). En el siguiente apartado (Estado del Arte) se describen los avances que existen en la medición sincronizada del fasor. 1.2 Estado del arte En 1988 se desarrolla en el Tecnológico de Virginia la primer Unidad de Medición Fasorial (PMU) sincronizada mediante un pulso de reloj proveniente de un GPS (Phadke, 2002). En 1995 se desarrolla el

LACCET’2005 – Energy Track – Paper No. 008 3
estándar IEEE 1344, en el cual se denomina a la PMU sincronizada mediante un GPS como Sincrofasor. En el mismo estándar se define el formato de los datos de salida de un sincrofasor. En el 2001 se reafirma dicho estándar (Phadke et al.,. 2001. Thorp, 1998). Actualmente, los equipos más desarrollados incorporan además de la función de medición fasorial el sistema de protección de línea de alta velocidad, automatización, control y protección de líneas de transmisión con funciones de distancia y direccionales (Anderson et al., 2003). No obstante el costo por nodo asciende hasta $24,000 USD por sincrofasor dedicado (Moxley et al., 2002). 2. Sincronía vía GPS El GPS consta en promedio de una constelación de 24 satélites activos. Los satélites describen tales orbitas que, en todo momento del día hay “línea de vista” de varios satélites en cualquier lugar de la Tierra. El sistema proporciona a usuarios terrestres que cuentan con un receptor GPS, varios servicios entre los que se encuentran la medición de las coordenadas geográficas, la altura al nivel del mar, la velocidad, la dirección del desplazamiento, la deriva magnética en grados, la hora mediante el UTC (Universal Coordinated Time) y la señal de un pulso por segundo (1PPS) entre otros (Moore, 1994. Trimble Navigation Limited, 2000). El GPS terrestre recibe la señal de uno o más satélites, (para poder calcular las coordenadas terrestres por ejemplo, se requiere que el receptor capte por lo menos tres satélites). Una vez que el receptor detecta una señal de buena calidad de al menos un satélite, éste decodifica el UTC y lo trasmite en sincronía con la señal de 1PPS a cada uno de los medidores fasoriales (PMU) (Phadke., 1993). Cada PMU utiliza la señal de 1PPS para sincronizar sus respectivos temporizadores de muestreo, calcula el fasor y lo trasmite junto con el UTC a un procesador central que es el que se encarga de calcular los desfases de cada nodo de medición, tal como puede apreciarse en la figura 2 del diagrama a bloques del sistema de medición.
Figura 2: Sistema de medición
GPS1 GPS2 GPSn
PMU 1 (A1, θ1)
PMU 2 (A2, θ2)
PMU n (An , θn)
Cálculo de los ángulos de desfase
Procesador Central

LACCET’2005 – Energy Track – Paper No. 008 4
2.1 Señal de sincronía 1PPS La señal de 1PPS es una señal TTL generada por el sistema GPS receptor (terrestre). Por omisión, cada vez que se energiza el receptor, se genera el 1PPS aunque no se haya detectado satélite alguno, una vez que se detecta por lo menos un satélite, el receptor sincroniza el flanco de subida del 1PPS con la recepción del UTC. La señal de 1PPS tiene un ancho de pulso de 10 microsegundos, un tiempo de ascenso típico menor de 20 nanosegundos y un periodo de un segundo con una exactitud de ±100 nanosegundos. A su vez el UTC esta sincronizado con un reloj atómico de Cesium de alta estabilidad que contiene cada satélite, el reloj de cada uno de los satélites están sincronizados entre si con un reloj maestro, de tal manera que, todos los satélites envían el UTC virtualmente al mismo tiempo. Para cualquier aplicación en donde se utilice el GPS para sincronizar, se deberá usar el flanco de subida del 1PPS ya que este se sincroniza a partir de la recepción del UTC (Trimble Navigation Limited, 2000). 3. Medición de los ángulos de desfase Para calcular el desfase en un nodo determinado, es necesario que uno de los ángulos de una de las señales, se seleccione como señal de referencia, con esta referencia el desfase de las señales de los demás nodos se calculan con una resta, como se puede observar en la figura 3.
Figura 3: Cálculo del ángulo de desfase El procedimiento del cálculo del desfase de las señales de la figura 3 se ejemplifica en los siguientes pasos:
• La referencia 1PPS se recibe al mismo tiempo en cada uno de los medidores.

LACCET’2005 – Energy Track – Paper No. 008 5
• Se calcula el ángulo de desfase de la señal medida en el nodo con respecto a la referencia 1PPS, dando como resultado los ángulos 1 y 2; θ1 y θ2 respectivamente.
• Cada medidor transmite por algún medio de comunicación a un procesador central los ángulos calculados junto con el tiempo específico en el que se hizo la medición.
• El procesador central calcula el desfase. Si se toma como referencia el medidor 1 (θ1). El desfase de la señal del medidor 2 con respecto a la señal del medidor 1 esta dado por δ2 = θ1-θ2.
4. Cálculo del fasor En 1983 se proponen una técnica para la medición de la amplitud y fase de una señal eléctrica (Phadke et al., 1983). En el cálculo se aplica la transformada discreta de Fourier (DFT) a un conjunto de muestras obtenidas de una ventana del tamaño de un periodo. La señal senoidal representada en su forma polar o fasorial esta dada por
θ∠A (1) y
( ) ( )22ir ZZA += (2)
r
i
ZZarctan=θ
(3)
(4)
(5)
[ ]nX son cada una de las muestras y N es el número de muestras obtenidas en la ventana de un periodo,
para la implementación que aquí se presenta se escogió un número de 16 muestras, siendo el mínimo aceptable de 12 (Phadke et al., 1983). Este proceso de cálculo es aplicado en el sistema eléctrico trifásico a cada una de las tres señales de voltaje y de corriente. 5. Diseño a bloques del instrumento El sincrofasor consiste en un sistema GPS ACE III de la marca Trimble, un DSP TMS320LF2407 de Texas Instrument (TI) y una computadora (PC). El GPS proporciona la señal 1PPS y el UTC para sincronizar la medición, el DSP calcula la amplitud y el ángulo de las señales con respecto al pulso de sincronía, la PC recibe los ángulos y amplitudes, hace un procesamiento y almacenamiento local y sube la información a un servidor vía Internet. Una PC remota recibe las señales de las diferentes estaciones locales para el cálculo del desfase, para hacer el cálculo a la PC remota se le especifica el nodo de referencia, es decir, el nodo con un ángulo de cero. Con el ángulo de referencia y el UTC la PC remota
⎟⎠⎞
⎜⎝⎛= ∑
−
= NnnX
NjZi
n
n
π2sin][2 1
0
[ ]∑−
=⎟⎠⎞
⎜⎝⎛=
1
0
2cos2 N
n NnnX
NZr π

LACCET’2005 – Energy Track – Paper No. 008 6
efectúa las restas de los ángulos que tienen el mismo UTC, de tal manera que el cálculo del desfase solo es posible si se tiene el fasor junto con el estampado de tiempo en que se efectuó la medición. El receptor GPS mediante un puerto serial asíncrono, transmite el UTC junto con otros datos en una cadena o trama de mensajes de acuerdo al protocolo estándar industrial NMEA 0183 (National Marine Electronics Association) (Trimble Navigation Limited, 2000). Existen otros protocolos, sin embargo el NMEA resulta ser el más económico y sencillo de utilizar, requiere de una sola vía de comunicación (simplex) y utiliza el código estándar ASCII. Otros protocolos además de ser de dos vías (full duplex), requieren del desarrollo de software para la interpretación de los comandos en código binario, por otro lado, el NMEA por su estatus de protocolo estándar, es manejado por la mayoría de los receptores GPS. En la figura 4 se muestra el diagrama a bloques del sistema.
Figura 4: Diagrama a bloques del sistema El DSPD TMS320LF2407 es un dispositivo de la familia C2000 de TI, esta familia fue una de las primeras en integrar en una sola pastilla de circuito integrado (CI) un DSP de punto fijo con diversos periféricos, a esta nueva generación de procesadores se les denomina DSP microntrolador ya que integran las funciones de un DSP y un microcontrolador. El bajo costo del desarrollo aquí presentado radica precisamente en concentrar en un solo CI la mayor parte de los requerimientos de diseño del instrumento. Detallando con más precisión el diagrama de bloques, se puede apreciar que en el DSP ya esta contenido el Convertidor Analógico Digital (ADC) de 10 bits y 16 canales de los cuales solamente se utilizan 6 canales. El ADC se encarga de digitalizar las señales analógicas de corriente y voltaje que ya previamente se han acondicionado a una señal de 0 a 3.3 volts (máximo nivel de voltaje que aceptan los canales del ADC). El temporizador (timer) cuya señal de reloj proviene de un oscilador de cuarzo se encarga de generar los periodos de muestreo, de tal manera que, se puedan adquirir con precisión y exactitud las 16 muestras por periodo de todas y cada una de las señales. A su vez, el inicio de las adquisiciones esta sincronizada con la señal de interrupción externa (XINT1) que proviene de la señal 1PPS del GPS. También mediante el timer se genera la tasa de transmisión “Baud Rate” (BR) que requiere la Interfase de Comunicación Serial (SCI). El DSP recibe por medio de la terminal RX el UTC del GPS. Por otro lado, una vez que se ha calculado el fasor, el DSP por medio de la terminal TX transmite a la PC el valor de la amplitud y el ángulo de fase. En la comunicación entre el DSP y la PC es requerido un circuito igualador de niveles eléctricos el cual se logra con el CI RS 232. Las características del la comunicación asíncrona con la cual se programa el SPI son las del estándar NMEA las cuales se enlistan en la tabla 1.

LACCET’2005 – Energy Track – Paper No. 008 7
Tabla 1: Características del estándar NMEA 0183
Baud Rate Bits de datos Paridad Bits de paro
4800 8 Ninguna 1 6. Proceso de medición Una vez que el receptor GPS terrestre se ha sincronizado con el satélite, la cadena de datos NMEA que contienen el UTC es transmitida 22ms después de que el GPS generó la señal de 1PPS. En la figura 5 se muestra la sincronía entre el 1PPS, la cadena de datos NMEA y una porción de la señal que se digitaliza. Como se puede observar, la información obtenida de la figura 5 sugiere la forma en como se puede calcular el fasor.
Figura 5: Sincronía IPPS, Trama NMEA y señal de 60Hz a digitalizar Entre el 1PPS y la trama NMEA (22ms) cabe un periodo de la señal a digitalizar (16.66ms), por lo tanto, el proceso debe seguir los siguientes pasos (ver tabla 2):
Tabla 2: Proceso de medición de los fasores
Paso Proceso 1 Se espera el 1PPS 2 Se hacen las 16 adquisiciones de los 6 canales 3 Se espera la trama NMEA 4 Se captura el UTC 5 Se calculan los seis fasores 6 Se transmiten el UTC y los seis fasores 7 Regresa al paso 1
6.1 Algoritmo computacional. El programa se compone básicamente de tres bloques: El programa principal, la rutina de servicio de la interrupción externa XINT1 (generada por el 1PPS) y la rutina de servicio de la interrupción de fin de conversión del ADC. En la figura 6 se muestran los diagramas de flujo de las tres partes del programa

LACCET’2005 – Energy Track – Paper No. 008 8
Figura 6: Diagramas de flujo del programa
Interrupción ADC
Contador de muestras 1=n
Lee Senn y Cosn
Calcula nnnn SenXSenX += −− 116,,2,1Im K
Calcula nnnn CosXCosX += −− 116,,2,1Re K
n = n+1
No 16=n ?
RETORNA
Espera trama NMEA, captura y transmite UTC
SI
Calcula y transmite fasores
RETORNA
Interrupción XINT
Arranca timer para Periodo de muestreo
RETORNA
Inicio Principal
Programa Periféricos XINT1, ADC, Timer, SCI
Ciclo principal
Espera interrupciones
1PPS Fin de conversión (XINT1) (ADC)

LACCET’2005 – Energy Track – Paper No. 008 9
El programa principal: En el programa principal se prepara y reserva la memoria a utilizar, se programan y habilitan los periféricos a utilizar: el ADC, el Timer y el SCI. Se habilitan las interrupciones y se esperan en un ciclo infinito las interrupciones XINT1 y la de fin de conversión del ADC. La rutina de servicio de la interrupción IXNT1: En esta rutina lo único que se hace es arrancar el temporizador que proporciona el periodo de muestreo del ADC. Como esta interrupción es generada por la señal 1PPS del GPS se presenta cada segundo. La rutina de servicio de la interrupción de fin de conversión del ADC: El periodo de muestro que genera el timer en el ADC es de 960 Hz, por lo tanto, esta interrupción se presenta en 16 ocasiones después de recibido el 1PPS. Aplicando el algoritmo computacional, cada vez que se genera la interrupción del ADC se hace el cálculo de nnCosX y se acumula con el mismo producto de todas y cada una de las muestras, para la primer interrupción en donde n = 1se tiene que:
00CosX = 00SenX = 0 (6) Como el ADC entrega el valor de la conversión de los 6 canales entonces, se pueden hacer las sumatorias de los productos de cada una de las 6 señales aplicando los siguientes algoritmos.
nnnn CosXCosX += −− 11Re (7)
nnnn SenXSenX += −− 11Im (8) De tal forma que, después de las 16 adquisiciones ya se tienen de las 6 señales las componentes real e imaginaria expresadas en las ecuaciones (4) y (5). Después de calculadas las componentes reales e imaginarias, se espera mediante poleo la recepción de datos provenientes del GPS (trama NMEA), se captura el UTC que llega con el formato HHMMSS.S. Ya capturado el UTC se transmite y se procede al cálculo del fasor de cada una de las 6 señales mediante las ecuaciones (2) y (3). Finalmente se transmiten los fasores calculados y se retorna al programa principal a esperar la siguiente interrupción del 1PPS. Conclusiones Actualmente los sincrofasores se encuentran instalados en líneas de transmisión, sin embargo, también son requeridos en las áreas de distribución, esto implica un gran gasto en medidores. El desarrollo aquí presentado permite un abatimiento de hasta el 80% del costo de los medidores comerciales. El bajo costo del desarrollo aquí presentado radica precisamente en concentrar en un solo CI la mayor parte de los requerimientos de diseño del instrumento. El reducido tamaño de la tarjeta del circuito impreso (PCB) y el uso de un procesador de punto fijo también fueron factores en el bajo costo del instrumento. Referencias Anderson, Chris, Fearn, Brian, Guzmán, Armando, Moxley, Roy.(2003) “Using SEL-421 relay synchrophasors in basic applications.” SEL Application Guide, Vol. 1 Martin, K. E., Benmouyal, G., Adamiak, M. G., Begovic, M., Burnett, R.O., Jr., Carr, K. R, Cobb, A,. Kusters, J. A., Horowitz, S. H., Jensen, G. R., Michel, G. L., Murphy, R.J., Phadke, A. G.., Sachdev, M.S., Thorp, J.S. (1998). ”IEEE standard for synchrophasors for power systems.” IEEE Transactions on Power Delivery, Vol. 13, No. 1, January.

LACCET’2005 – Energy Track – Paper No. 008 10
Moore, T. (1994) “An introduction to the global positioning system and its applications.” Developments in the Use of Global Positioning Systems , the Institution of Electrical Engineers. Savoy Place. London, UK 8 Feb Pages:1/1 - 1/6. Moxley, Ro, Woodward Darold. (2002).”Improving power system operating capacity through wide-area synchronous phase angle measurement.” Schweitzer Engineering Laboratories, Inc. Phadke, A. G., Thorp, J. S., Adamiak, M. G. (1983). “A new measurement technique for tracking voltage phasors, local system frequency, and rate of change frequency.” IEEE Transactions on Power Apparatus and Systems, Vol. PAS-102, No. 5, May. Phadke, A. G. (1997) “Synchronized phasor measurements, Chapter 6.” IEEE Tutorial Course, Advancements in microprocessor based protection and communication. Phadke, A.G. (2002) “Synchronized phasor measurements-a historical overview.”Transmission and Distribution Conference and Exhibition: Asia Pacific. IEEE/PES , Volume: 1 6-10 Oct. Pages:476 - 479 vol.1. Phadke, A.G. (1993) “Synchronized phasor measurements in power systems.”Computer Applications in Power, IEEE , Volume: 6 , Issue: 2 , April Pages:10 – 15. Phadke, A. G., Martin, K. (2001). ”IEEE standard for synchrophasors for power systems.” IEEE Std 1344-1995(R2001). Trimble Navigation Limited. (2000). “ACE III GPS™ System Designer Reference Manual.” Sunnyvale, CA. Información Biográfica Rafael SAN VICENTE CISNEROS Mr. Profesor del Departamento de Ingeniería Eléctrica y Electrónica del Instituto Tecnológico y de Estudios Superiores de Monterrey - Campus Estado de México, Estudiante del Doctorado en Ciencias en Ingeniería Eléctrica en la Sección de Graduados e Investigación de la ESIME-IPN. Dr. Raúl CORTÉS MATEOS. Profesor Titular (TCE). Ingeniero en Comunicaciones y Electrónica de la ESIME-IPN (1971). Maestro en Ciencias en Ingeniería Eléctrica, Sección de Graduados e Investigación ESIME-IPN (1975). y Doctor en Ciencias en Ingeniería Eléctrica en la Sección de Graduados e Investigación de la ESIME-IPN (1997). Dr. Jaime ROBLES GARCÍA. Profesor Titular (TCE). Ingeniero Electricista de la ESIME-IPN (1987). Maestro en Ciencias en Ingeniería Eléctrica, Sección de Graduados e Investigación ESIME-IPN (1993). Doctor en ciencias en Ingeniería Eléctrica, Sección de Estudios de Posgrado e Investigación (1996). Dr. Jesús Enrique CHONG QUERO. El Dr. Chong Quero es profesor del Departamento de Ingeniería Eléctrica y Electrónica del Instituto Tecnológico y de Estudios Superiores de Monterrey - Campus Estado de México, y actualmente es colaborador del Centro de Investigación en Calidad Ambiental del mismo Instituto.