
TESIS DE MAESTRÍA EN CIENCIAS - cenidet.edu.mx Lucio... · Gracias..., por haberme admitido en tu...
134
Centro Nacional de Investigación y Desarrollo Tecnológico Departamento de Ingeniería Mecánica TESIS DE MAESTRÍA EN CIENCIAS Bases para el Diseño de Prótesis de Hombros presentada por Lucio Francisco González Alejandro Ing. Mecánico por el Instituto Tecnológico de Campeche como requisito para la obtención del grado de: Maestría en Ciencias en Ingeniería Mecánica Director de tesis: Dr. José María Rodríguez Lelis Jurado: Dr. Dariusz Slawomir Szwedowicz Wasik – Presidente M.C. Claudia Cortés García – Secretario M.C. Eladio Martínez Rayón – Vocal Dr. José María Rodríguez Lelis – Vocal Suplente Cuernavaca, Morelos, México. 14 de Diciembre de 2012
Transcript of TESIS DE MAESTRÍA EN CIENCIAS - cenidet.edu.mx Lucio... · Gracias..., por haberme admitido en tu...
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Mecánica
TESIS DE MAESTRÍA EN CIENCIAS
Bases para el Diseño de Prótesis de Hombros
presentada por
Lucio Francisco González Alejandro Ing. Mecánico por el Instituto Tecnológico de Campeche
como requisito para la obtención del grado de:
Maestría en Ciencias en Ingeniería Mecánica
Director de tesis: Dr. José María Rodríguez Lelis
Jurado: Dr. Dariusz Slawomir Szwedowicz Wasik – Presidente
M.C. Claudia Cortés García – Secretario M.C. Eladio Martínez Rayón – Vocal
Dr. José María Rodríguez Lelis – Vocal Suplente
Cuernavaca, Morelos, México. 14 de Diciembre de 2012
*** GRACIAS MAMA ***
Hoy quiero darte las gracias, por todas aquellas pequeñas cosas que hiciste por mí, a lo largo de tu vida...
Gracias..., por haberme admitido en tu cuerpo durante nueve meses, por haber compartido conmigo tu espacio, tu aire y tu mundo, y por haber soportado, valientemente, todo el dolor que, en su momento, implicó para ti darme la vida. Gracias..., por tu tiempo y atenciones mientras fui un bebé indefenso; por tus miles de cuidados, por alimentarme pacientemente cada día.
Gracias..., porque a medida que fui creciendo, siempre estuviste a mi lado, aún cuando yo no deseaba que estuvieras ahí; por tu útil consejo en los momentos difíciles, y por todas las veces que callaste, para que yo aprendiera con tu silencio.
Gracias..., por enseñarme el amor a la lectura, porque gracias a eso crezco día a día. Gracias por tu enorme fe en Dios, por inculcarla en mí desde pequeño, y porque siempre actuaste congruentemente con esa fe, aún en los momentos más difíciles de tu vida.
Gracias..., por enseñarme a dar, a compartir, sin importar si la otra persona merecía recibir o no, porque con tu ejemplo aprendí a cuidar de los demás y a procurarles siempre lo mejor.
Gracias también, por enseñarme a escuchar; a veces eso ayuda más que todo el oro del mundo. Gracias..., por darme tu mano cuando lo necesité; por estar siempre cerca, y aún así permitir que tomara mis propias decisiones, mis propios riesgos. Gracias..., por dejarme decidir, por respetar mis decisiones, por estar ahí cuando tuve descalabros.
Gracias..., porque hoy, mañana y siempre, tu recuerdo me acompaña, me guía y me da fuerzas en los momentos difíciles. Gracias..., por ser mi madre; eres es el ser más maravilloso que he conocido. No tengo palabras para agradecerle a Dios el que me haya permitido ser tu hijo, y todo el tiempo que nos permitió estar juntos.
"La Fe es el pájaro que canta cuando el amanecer está todavía oscuro"
*** DEDICATORIAS ***
Señor y Dios mío, el camino de la vida es fácil de recorrer si sigo tus huellas, las vicisitudes desaparecen al estar en tu regazo, y una sola hoja no se mueve sin tu voluntad. Por eso en mi humana pequeñez quiero poner en tus santas manos, humildemente este trabajo para ofrecértelo, que sea de gran utilidad para el bien de todas aquellas personas que necesiten de esta investigación, sobre todo darte las gracias, porque en tu infinita bondad haz permitido que fructifique y al mismo tiempo me haz concedido culminar esta meta en el camino de la superación profesional.
Señor te agradezco por todo el gran amor, por la fuerza, y la valentía que toda mi vida me haz dado, por toda la luz que haz proyectado en mi camino y por todas las grandes personas que siempre haz puesto en mi camino.
A mi Padre un gran hombre, gracias por estar conmigo siempre, en las buenas y en las malas, gracias por todo el amor que me haz dado, por hacerme sentir seguro y protegido, agradezco tu paciencia, tu confianza, por el valor, gran tenacidad y el coraje que has tenido para levantarte ante cualquier adversidad, por las enseñanzas que me has dado, y por darme ánimos siempre diciéndome lo orgulloso que te sientes de tus hijos, gracias porque aparte del padre más amoroso del mundo eres mi gran amigo, gracias por ser un ejemplo de vida para mí.
De manera muy especial a ti Mamá, por el gran amor y la devoción que tienes a tus hijos, por el apoyo ilimitado e incondicional que siempre me has dado, por tener siempre la fortaleza de salir adelante sin importar los obstáculos, por haberme formado como un hombre de bien, y por ser la mujer que me dio la vida y me enseño a vivirla… no hay palabras en este mundo para agradecerte, pues lo que soy es la realización de todo tu amor, y tu dedicación, por tus incansables esfuerzos para apoyarme, siéntete orgullosa de tu gran trabajo como madre, porque yo lo estoy de ti. Gracias por ser mi madre.
Gracias Padre, gracias Madre por que por su dedicación, amor, por enseñarme a luchar hacia delante, por su gran corazón y capacidad de entrega, pero sobre todo por enseñarme a ser responsable, gracias a ustedes he llegado a esta meta.
A Sofía por estar a mi lado en los momentos importantes de mi vida, por ser mi apoyo, gracias por tu gran paciencia y amor, gracias por tu ayuda, por impulsarme y apoyarme en mis proyectos profesionales, por enseñarme el maravilloso arte del amor, gracias por tu hermosa nobleza y por las inolvidables experiencias que hemos vivido. Te amo.
A mi sobrino: Carlos Jesús González Gutiérrez †, a este angelito, que aunque en el cielo se encuentran. Siempre su recuerdo estará presente en mi mente y corazón, dándome la fortaleza y motivo para seguir superándome (in memoriam).
A mis hermanos Reyna, Juan y José Carlos por ser mis Ángeles. La vida no la concibo sin su compañía, sus cuidados y su gran amor. Gracias por hacer de todas las situaciones siempre aventuras inolvidables. Los amo mucho.
Hay diferentes tipos de familias, todas tienen sus defectos y por supuesto sus
virtudes. Se puede elegir a los amigos, pero la familia es algo que te toca desde que naces, al mismo tiempo es el grupo de personas que más te ayudan, te quieren y se preocupan por ti. Conforme van pasando los años nos vamos dando cuenta que hay personas que vienen y van, excepto nuestros familiares que siempre se encuentran allí, para cuando los necesites. Debemos cuidarlos, y aquí esta dedicatoria a la familia Frías Enríquez les quiero agradecer tan hermoso regalo que aunque pequeño ha de ser, ha sido lo mejor, sin esperar nada a cambio han escuchado mis llantos, mis dolores sin espanto y todos mis quebrantos. A ustedes quiero agradecer lo maravillosos que han sabido ser conmigo. Gracias por todos los momentos que hemos vivido, momentos llenos de sentimientos, risas y pensamientos compartidos, Gracias por dedicarme tiempo, tiempo para demostrar su preocupación por mí, tiempo para escuchar mis problemas, mi sufrir y ayudarme a descubrir que a pesar de los problemas se puede ser feliz. Gracias por ser quienes son, personas maravillosas con un hermoso corazón, corazón tan grande que cabe todo su mundo alrededor. Quiero brindarles mi apoyo, apoyo incondicional de la misma manera en la que ustedes me lo han sabido regalar. Sé que no me han escuchado, pero me ha llegado el momento De decirles: “Los Quiero” y los llevo en un lugar muy preciado. Gracias Daniel Frías, Juana Enríquez, Miriam Enríquez y de manera muy especial con el amor que se merecen Danielita y Benedicto (bodoquin).
-Agradecimientos-
Al Consejo Nacional de Ciencia y Tecnología por su apoyo económico durante el desarrollo de esta tesis.
A mi Alma máter el Centro de Nacional de Investigación y Desarrollo
Tecnológico, por darme la oportunidad de alcanzar esta meta, gracias a los profesores investigadores quienes durante este ciclo se esmeraron por dar lo mejor para mi formación como maestro en ciencias, por los conocimientos teóricos y las experiencias vividas.
A mis revisores de tesis por su amable aceptación, el tiempo, los consejos y las
recomendaciones vertidas en la investigación: Dr. Dariusz Slawomir Szwedowicz Wasik, M.C. Claudia Cortés García y al M.C. Eladio Martínez Rayón.
Muy particularmente agradezco a mi asesor de tesis el Dr. José María
Rodríguez Lelis por ser un gran científico, un colosal guía para el asesorado, un gran apoyo en los momentos difíciles del proyecto, porque nunca escatimó esfuerzo y tiempo para corregir y mejorar este trabajo, por sus valiosos conocimientos siempre al servicio del tesista, por ser firme en los momentos que se requería. Pero sobre todo porque me demostró en el trayecto de esta tarea que parecía no tener fin, que es un gran profesor y excelente ser humano.
Gracias al departamento de Tribología-Biomecánica donde realicé mi trabajo
de investigación y a todos y cada uno de mis amigos de esta área por permitirme ser una amalgama de sus conocimientos y consejos. Así mismo por compartir las faenas del estudio, los problemas cotidianos, como también vivencias estudiantiles, chascarrillos y cambios de culturas (frases en los diferentes dialectos). Gracias: Alejandro Garza, Vanessa Ensaldo, Maribel Herrera, Rodrigo Silva, Magali García, Rubisel Escobar, Ulysses Gastelum, Azucena Carrillo, Antonio Arellano y Pedro Cruz.
También a mis compañeros de generación: Pedro Aguilar, David Andrade, Carlos Carreño, Fernando Castro, Miguel Chagolla, Ernesto Galindo, Emmanuel Gil, Enrique López, Jacobo Saynes Marco Torres; de igual forma a: Ivett Zavala, Ingrid Jiménez, Daniel Barrera, Manuel Guzmán, Edgar Macías Melo, Karla Aguilar, Álvaro Yam, Victor Pavón y Miguel Jiménez Xaman que durante este proceso se convirtieron en mis compañeros y compartimos experiencias inolvidables. A equipos médicos Vizcarra por su incondicional y valioso apoyo durante los últimos meses del desarrollo de mi tesis y de manera especial a la M. en B. Teresa Lucas por su amistad brindada en este lapso de tiempo, gracias por todo.
A todas las personas que directa o indirectamente me ayudaron en este trabajo.
¡Muchas gracias!
Contenido
i
Contenido
Página
Lista de figuras vi
Lista de tablas ix
Resumen x
Abstrac xi
Introducción 1
Bibliografía 4
Capítulo 1. Antecedentes 5
1.1 Introducción 5
1.2 Antecedentes históricos 6
1.3 Evaluación del diseño de prótesis mediante TA’s 7
1.4 Fijación, componente y cavidad glenoidea 9
1.5 Material óseo 11
1.6 Materiales compuestos 15
1.7 Recubrimiento 16
1.8 Bibliografia 19
Contenido
ii
Capítulo 2. Teoría básica 24
2.1 Introducción 24
2.2 Anatomía y biomecánica del hombro 25
2.2.1 Anatomía 25
2.2.2 Biomecánica y rango de movilidad articular 26
2.2.3 Articulación glenohumeral 27
2.3 Artrosis 29
2.3.1 Generalidades de la articulación 29
2.3.2 Motivos para la colocación de prótesis 30
2.4 Características geométricas del hombro 32
2.5 Propiedades mecánicas del húmero 35
2.6 Fuerzas que actúan el la articulación glenohumeral 36
2.6.1 Fuerzas, dirección y magnitudes 36
2.7 Tipos de prótesis de hombro 38
2.7.1 Tipos de prótesis: total y parcial de hombro 38
2.8 Tomografía axial computarizada para el biomodelado del humero 3D 43
2.8.1 Visualización y procesamiento de imágenes tomográficas 45
2.9 Biomateriales 46
2.10 Modelos analíticos y numéricos en materiales compuestos 47
2.10.1 Material compuesto 48
2.10.2 Propiedades mecánicas de los materiales compuestos 50
2.10.3 El campo elástico en una inclusión elipsoidal 57
Contenido
iii
2.11 Proceso de triboadhesión 63
2.11.1 Antecedentes de la triboadhesión 63
2.11.2 Descripción del procedimiento de deposición 64
2.11.3Triboadhesión 65
2.11.4 Generación de calor 66
2.12 Bibliografía 67
Capítulo 3. Bases para el modelado mediante TAC’s 70
3.1 Introducción 70
3.2 Metodología del modelado 3D del humero por TAC’s 71
3.2.1 Obtención de tomografías 73
3.2.2 Tratamiento e importación de imágenes 74
3.2.3 Refinamiento del modelo 3D del húmero 77
3.2.4 Exportación del modelo a formato STL 78
3.3 Modelado de la prótesis 81
3.4 Ensamblaje de la prótesis en el húmero 85
3.5 Bibliografía 87
Capítulo 4. Análisis numérico del ensamblaje húmero-prótesis 88
4.1 Introducción 88
4.2 Simulación numérica 89
4.2.1 Construcción del modelo en software de elementos finitos 89
Contenido
iv
4.2.2 Asignación de propiedades mecánicas 89
4.2.3 Asignación de cargas que actúan en la articulación glenohumeral 90
4.3 Condiciones de frontera 94
4.4 Propiedades de la malla 96
4.4.1 Procesado de la malla 96
4.5 Análisis numérico 99
4.5.1 Húmero 99
4.5.2 Prótesis anatómica de UHMWP solida 100
4.5.3 Prótesis anatómica de UHMWP solida con inclusiones 90º/60º 101
4.5.4 Prótesis anatómica de UHMWP solida con inclusiones 90º/45º 102
4.5.5 Prótesis anatómica de UHMWP solida con inclusiones 90º/30º 103
4.5.6 Prótesis anatómica de aleación comercial solida 104
4.6 Análisis de resultados 104
4.6.1 Ensamble húmero-prótesis sin inclusiones de UHMWP 106
4.6.2 Ensamble húmero-prótesis con inclusiones de UHMWP 107
4.6.3 Ensamble húmero-prótesis de aleación comercial 108
4.6.4 Conclusiones 109
4.7 Bibliografía 110
Capítulo 5. Conclusiones y trabajos futuros 111
5.1 Conclusiones 111
5.2 Trabajos futuros 113
Contenido
v
Apéndice A 114
Apéndice B 115
Lista de figuras
vi
Lista de figuras
Figura Pagina Figura 2.1 Partes del húmero 25 Figura 2.2 Músculos del manguito rotador Figura 2.3 Relación del miembro superior con los tres ejes planos del
espacio 25
Figura 2.4 Control muscular del hombro 26 Figura 2.5 Cabeza humeral 27 Figura 2.6 Cavidad y rodete glenoideo 28 Figura 2.7 Aspecto de una articulación con artrosis tras una necrosis
avascular 28
Figura 2.8 Aspecto de una articulación de hombro normal 29 Figura 2.9 Radiografía que muestra nivel de artrosis 30 Figura 2.10 Artrosis por rotura de manguito 31 Figura 2.11 Necrosis avascular 31 Figura 2.12 Ilustración que muestra los parámetros radiológicos
estudiados 31
Figura 2.13 (A) AP radiografía y (B) La radiografía axilar de un paciente sometido a una artroplastia de hombro invertida con el sistema de coordenadas superpuestos
32
Figura 2.14 Cambio en la COR para los 2 diseños de prótesis en la proyección (a) AP y (b) la proyección axilar
33
Figura 2.15 Superficie natural del glenoide 33 Figura 2.16 Superficie glenoidea 34 Figura 2.17 Impresión en goma de silicona 34 Figura 2.18 El área de superposición de la cavidad glenoidea la cabeza
humeral y el componente glenoide se muestra en color rosa, el punto negro es el centroide de la zona de contacto de color rosa
34
Figura 2.19 Área cancelada de silicón digitalizada en el componente glenoideo
34
Figura 2.20 Ejes de definición de la cavidad glenoidea con respecto a un hombro izquierdo se muestra en la cavidad glenoidea blanca
34
Figura 2.21 Diagrama de cuerpo libre de las fuerzas que actúan en la articulación glenohumeral
37
Figura 2.22 Fuerzas y magnitudes que actúan en la articulación glenohumeral
37
Figura 2.23 Esquemas de diferentes diseños de prótesis constreñidas 39 Figura 2.24 Prótesis no constreñidas, modelo de Neer I 41
Lista de figuras
vii
Figura 2.25 Dibujo esquemático de una típica instalación de escáner CT 44 Figura 2.26 Planos del cuerpo humano 45 Figura 2.27 Medio poroso como superimposición de dos medios continuos 49 Figura 2.28 Niveles macroscópicos y microscópicos en escalas
características 50
Figura 2.29 Esquema de transformación de un material con una inhomogeneidad a un material homogéneo equivalente
52
Figura 2.30 Área representativa de un cuerpo elástico con huecos 56 Figura 3.1 Pasos para la generación del modelo 3D del húmero a partir
de TAC’s 72
Figura 3.2 Tomografías. Silueta de una sección del húmero en sus vistas transversal, lateral y frontal del húmero
73
Figura 3.3 a) Cortes tomográfico transversales del húmero, b) húmero sin cortes tomográfico
74
Figura 3.4 Contorno seleccionado de color verde del corte transversal del húmero
75
Figura 3.5 Relleno seleccionado de color purpura de un corte transversal del húmero
76
Figura 3.6 Modelo 3D de una sección del húmero 77 Figura 3.7 Se muestra el proceso de refinamiento del modelo del húmero 78 Figura 3.8 Modelo guardado en código binario en formato STL 79 Figura 3.9 Partes de la cabeza humeral 80 Figura 3.10 Corte de la sección de la cabeza humeral en el modelo 3D
obtenido, que será remplazada por la prótesis anatómica diseñada.
80
Figura 3.11 Vistas de las tomografías para distinguir hueso cortical (contorno blanco) y hueso trabecular parte interna del hueso cortical
81
Figura 3.12 Sección del hueso trabecular en una tomografía 82 Figura 3.13 Medias del grosor del hueso trabecular en una tomografía del
húmero 82
Figura 3.14 Prótesis solida (diferentes vistas) 83 Figura 3.15 Prótesis con inclusiones 84 Figura 3.16 Ensamblaje Húmero-prótesis sin inclusiones 85 Figura 3.17 Ensamblaje Húmero-prótesis con inclusiones 85 Figura 4.1 Brazo en abducción a 90º 90 Figura 4.2 Ubicación de la fuerza del musculo Deltoides en el húmero 91 Figura 4.3 Ubicación de la fuerza de la articulación glenohumeral
actuando en la prótesis 92
Figura 4.4 Ubicación de la fuerza del musculo Subscapularis en el húmero
93
Figura 4.5 Ubicación de la fuerza del musculo Supraspinatus en el húmero
93
Figura 4.6
Ubicación de la fuerza del musculo Teres minor e infraspinatus en el húmero
94
Lista de figuras
viii
Figura 4.7 Condiciones de frontera del ensamble húmero-prótesis 95 Figura 4.8 Ampliación de la condición de frontera µ=0 del ensamble
húmero-prótesis 95
Figura 4.9 Modelo 3D del húmero mallado 97 Figura 4.10 Mallado del modelo 3D del húmero sin la sección de la cabeza
humeral dañada 98
Figura 4.11 Mallado del modelo 3D de la prótesis anatómica 98 Figura 4.12 Mallado del ensamble Húmero-Prótesis 98 Figura 4.13 Análisis numérico anisotrópico del húmero 99 Figura 4.14 Análisis numérico de la prótesis anatómica de UHMWP sin
inclusiones 100
Figura 4.15 Análisis numérico de la prótesis anatómica de UHMWP con inclusiones 90-60º
101
Figura 4.16 Análisis numérico de la prótesis anatómica de UHMWP con inclusiones 90-45º
102
Figura 4.17 Análisis numérico de la prótesis anatómica de UHMWP con inclusiones 90-30º
103
Figura 4.18 Análisis numérico de la prótesis anatómica de UHMWP con inclusiones 90-30º
104
Figura 4.19 Grafica de resultados obtenidos, de los análisis numéricos de las prótesis anatómica de UHMWP con y sin inclusiones y la prótesis ASTM-75. Sin inclusiones (S/I), con inclusiones (C/I).
105
Figura 4.20 Análisis numérico del ensamble húmero-prótesis anatómica solida de UHMWP
106
Figura 4.21 Análisis numérico del ensamble húmero-prótesis anatómica con inclusiones de UHMWP
107
Figura 4.22 Corte transversal y escala baja de esfuerzos del análisis numérico del ensamble húmero-prótesis anatómica con inclusiones de UHMWP
107
Figura 4.23 Análisis numérico del ensamble húmero-prótesis anatómica ASTM-75
108
Figura 4.24 Corte transversal y escala baja de esfuerzos del análisis numérico del ensamble húmero-prótesis anatómica ASTM-75
108
Figura 4.25 Esfuerzos máximos y mínimos de los ensambles húmero-prótesis
109
Lista de tablas
ix
Lista de tablas
Tabla Página
Tabla 2.1 Valores de movilidad pasiva del hombro 26
Tabla 2.2 Propiedades mecánicas anisotropicas del hueso (A. Ramos) 35
Tabla 2.3 Propiedades mecánicas isotrópicas del hueso 36
Tabla 2.4 Datos resultantes de las fuerzas de músculos que actúan en la articulación glenohumeral
38
Tabla 2.5 Ventajas y desventajas de la artroplastia y hemiartroplastia 42
Tabla 2.6 Propiedades elásticas de las prótesis 47
Tabla 4.1 Propiedades mecánicas anisotropicas del hueso empleadas en el análisis de elemento
89
Tabla 4.2 Propiedades elásticas de las prótesis empleadas en el análisis de elemento finito
90
Tabla 4.3 Datos característicos de los músculos que actúan en la articulación glenohumeral
91
Tabla 4.4 Tipo y número de elementos finitos de los modelos 3D diseñados 97
Tabla 4.5 Esfuerzos máximos y mínimos de las prótesis propuestas 105
Tabla 4.6 Esfuerzos máximos y mínimos de los ensambles humero-prótesis 109
Resumen
x
Resumen
En la presente tesis se diseña un modelo 3D de una prótesis de hombro con un
arreglo de inclusiones para reducir los esfuerzos y así disminuir el aflojamiento con el
húmero, también reproducir un modelo CAD del húmero humano. El diseño del húmero se
elabora con el uso de tomografías computarizadas y un software de procesamiento de
imágenes; una vez que se tiene el diseño del húmero, se procede a modelar con el software
CAD la prótesis anatómica con inclusiones ad hoc a la estructura ósea que se obtuvo con
las tomografías computarizadas. El siguiente paso, mediante el método de elementos
finitos es analizar el húmero humano, la prótesis y el ensamble húmero-prótesis, asignando
las propiedades correspondientes a cada material y ubicando las fuerzas correspondientes a
los músculos que actúan en la abducción del brazo a 90º.
Los resultados obtenidos fueron satisfactorios, se logró reducir los esfuerzos en el
nuevo modelo de la prótesis de polietileno de ultra alto peso molecular hasta un 87 % a
diferencia de los otros modelos de prótesis de UHMWP y la de aleación comercial ASTM-
75. También se mejoró la accesibilidad económica de la prótesis diseñada en comparación
con las comerciales. De la misma forma se plantea un método adecuado para la obtención
de modelos 3D de estructuras óseas.

Resumen
xi
Abstrac
In this thesis, a 3D model shoulder prosthesis was designed with a set of inclusions
to reduce the stress and reduce the loosening between the humerus and prosthesis as well
as reproduce a human humerus CAD model. The humerus design is elaborated with the
using of computer tomography as well as an image processing software, once I has the
humerus design, it proceed to model with de CAD software, the anatomic prosthesis with
inclusions ad hoc to the bone structure. The next step, by means of the Finite Element
Analysis is to analyze the human humerus, the prosthesis and the humerus-prosthesis
assembly, assigning the corresponding properties to each material and placing the
corresponding forces to the acting muscles in the arm abduction at 90 degrees.
The obtained results were satisfactory, the stress in the new polyethylene prosthesis were
reduced by 87 %. Also the economic accessibility of the designed prosthesis improved and
is less costly compared to commercial ones. In the same way it is also proposed an
appropriate method in obtaining the bone structure in a 3D model.
Introducción
1
Introducción La Biomecánica es una disciplina que estudia los modelos y fenómenos del
movimiento en los seres vivos, tiene por objeto el estudio de las estructuras de carácter
mecánico que componen a los seres vivos, en especial el cuerpo humano. La Biomecánica
es el cuerpo de conocimientos que, usando las leyes de la física y de la ingeniería, describe
los movimientos efectuados por los distintos segmentos corporales y las fuerzas actuantes
sobre estas mismas partes, durante las actividades normales de la vida diaria. Los
desarrollos en biomecánica brindan aportes a la traumatología y ortopedia, a su vez tienen
una demanda social por el elevado número de individuos que presentan problemas o
trastornos en el aparato locomotor como consecuencia de enfermedades o accidentes. El
estudio de la biomecánica se puede dividir en varias etapas como son la observación y
entendimiento del sistema músculo esquelético, el modelado, la teorización, la
experimentación y la validación. Todas estas etapas se han visto potenciadas en las últimas
décadas a partir de la contribución de las computadoras en la adquisición, el análisis, el
manejo de datos y su visualización. La simulación computacional permite crear los medios
virtuales para el diseño, creación y evaluación de dispositivos tales como fijadores
externos, prótesis, y materiales de osteosíntesis como clavos, tornillos y placas sin
necesidad de intervención y experimentación en el cuerpo humano.
Dentro de los problemas que generan la necesidad del uso de prótesis están: la
destrucción de las superficies articulares como el manguito de los rotadores, que provoca
dolores intensos, que en algunos casos, causan impotencia en la movilidad de algún
miembro locomotor superior del cuerpo humano. Existen diferentes tipos de prótesis de
hombro que con el paso de los años se van modernizando. De acuerdo a las revisiones
bibliográficas de las últimas innovaciones protesticas, se encontró que producen a
mediano y largo plazo problemas específicos, como el desgaste de la cavidad glenoidea
ósea, el aflojamiento de las partes protesticas, infecciones y hasta necesitar de otros
intervenciones quirúrgicas.
Introducción
2
Con los resultados publicados por F. Handelberg [1], la frecuencia de
complicaciones en las prótesis de hombro se sitúa entre el 10 y el 16%. A corto plazo se
observa sobre todo rigidez a causa de capsulitis o inestabilidades que llevarán más adelante
a una revisión. Los tipos de prótesis: hemiartroplastia, prótesis total anatómica y prótesis
invertidas, producen a medio y largo plazo problemas específicos, como el desgaste de la
cavidad glenoidea ósea, el aflojamiento del implante glenoideo anatómico o el
aflojamiento del implante esférico en las prótesis invertidas. Esto suele producir una
pérdida de la reserva ósea glenoidea, que deberá reconstruirse en una o dos intervenciones,
con el fin de poder implantar la nueva prótesis. El vástago humeral presenta menos
problemas, pero en el caso de revisión, por lo general se debe tener en cuenta todos los
riesgos y dificultades que esto implica. La infección es otra causa de revisión generalmente
compleja y difícil de tratar, y puede dar lugar a la retirada definitiva del implante. La
cirugía de revisión genera una tasa de complicaciones mucho más elevada que la
artroplastia inicial y que en todas las series publicadas o presentadas recientemente el
número de revisiones reiteradas es elevado [1].
Además, se evalúa el ciclo de vida debido a que una vez que la cirugía se halla
realizado la prótesis podrá permanecer un de tres a cinco años en el interior del cuerpo
humano y después ser remplazada. También con el diseño de la prótesis anatómica
propuesta se reducen los precios ya que los costos de las prótesis de hombro que existen en
la actualidad varían el precio según el tipo de cirugía que se tengan que realizar, los
materiales e insumos que se requieran. Los costos de las prótesis de hombro varían entre
10,000.00 y 15,000.00 dólares [2]. En Estados Unidos la articulación del hombro es la
tercera artroplastia mas frecuente, después de la de cadera y rodilla, con aproximadamente
50,000 operaciones realizadas cada dos años [3], en promedio, lo que no daría un promedio
total de entre $500,000,000.00 y $750,000,000.00 de dólares. Por lo tanto con la nueva
prótesis de hombro se podrían reducir el tiempo de manufactura y también la sociedad
podría adquirirla, de una forma más rápida y a un costo mas bajo. De igual forma, el
modelado de la prótesis y la traducción de una tomografía computarizada a un lenguaje
CAD será de mucha importancia ya que habrá personas que no puedan ser expuestas
continuamente a los rayos-X; así como el diseño y la prótesis de hombro tendrán menos
etapas para su construcción, lo que repercute a una reducción de tiempo de manufactura.

Introducción
3
Debido a las complicaciones que actualmente presentan las prótesis de hombro, en
este trabajo de tesis se evaluarán todos los aspectos de diseño, anatomía del hombro,
fuerzas que intervienen y propiedades físicas-mecánicas, para diseñar una nueva prótesis
de hombro que reduzca los problemas que presentan las prótesis actuales.

Bibliografía
4
Bibliografía
[1] F. Handelberg a: Chef de l'unité de pathologie de l'épaule et de traumatologie sportive,
C. Maynou b : Chef du service de chirurgie orthopédique A a Service d'orthopédie et de traumatologie, Universitair Ziekenhuis Brussel, avenue du
Laerbeek, 101, B 1090 Bruxelles, Belgique b Hôpital Salengro, CHRU de Lille, 2, avenue Oscar-Lambret, 59037 Lille cedex, France
[2] Scheffer JC, Patte D.Prothèses totales d’épaule EncyclMéd Chir 1987; (Elsevier SAS,
Paris) Techniques chirurgicales – Orthopédie-Traumatologie, 44-294, 8p
[3] Steve Supersmart, MD. XYZ Orthopaedics 123 Medical Avenue City, ST 12345
Capítulo I: Antecedentes
5
Capítulo 1
Antecedentes 1.1 INTRODUCCIÓN
El cuerpo humano tiene un sistema de locomoción complejo, en particular la
articulación glenohumeral. Esta a causa de su uso presenta deterioro por múltiples factores
tanto metabólicos, mecánicos y traumáticos, lo que provoca en muchas ocasiones el
remplazo parcial o total de sus componentes, se estima que se realizan alrededor de 25,000
artroplastias al año en Estado Unidos de América, por esto las investigaciones avanzan día
a día sobre todo en el diseño y materiales de los implantes, en particular en el desarrolló de
un sistema qué minimice al máximo el desgaste de superficies y el aflojamiento.
Este capítulo se presenta la revisión bibliográfica de los estudios que dieron pauta
al conocimiento sobre los conceptos básicos de Biomecánica, anatomía del hombro,
artroplastia y prótesis de hombro; aquí se revisan los tipos de diseño y generaciones
protésicas, técnicas de fijación, biomateriales, materiales de recubrimiento, investigaciones
y resultados de diferentes autores hasta la fecha.
Capítulo I: Antecedentes
6
1.2 ANTECEDENTES HISTORICOS
La artrosis puede ocurrir sin historial previo de traumatismo, simplemente a causa
del desgaste en la articulación, ésta es la causa más común por la que los pacientes se
someten a cirugía total o parcial de hombro. Los factores genéticos pueden aumentar las
posibilidades de desarrollar una artrosis. Otra causa de degeneración de la articulación del
hombro es la necrosis avascular, donde la cabeza humeral pierde una parte de su riego
sanguíneo y muere, lo que provoca el hundimiento de la cabeza humeral, la reducción de
su esfericidad y degeneración. Por otro lado, algunas enfermedades de la infancia como
luxación congénita de hombro pueden también dar lugar a la degeneración de la
articulación, ya que impide su correcto funcionamiento. Además de las tres causas antes
mencionadas, se puede mencionar la fractura como una causa importante por la que la
articulación deje de funcionar correctamente y por la cual una vez que el médico halla
valorado el mal estado de la articulación sugiera el implante de una prótesis.
El primer registro de una artroplastia de hombro, se debe a Ollier [1] en 1880, y
posteriormente a Murphy, Quenu y Kirschner [2]. Estas artroplastias, se construyeron con
materiales como: colgajo adiposo, colgajo de cápsula o de piel conservada. Éstos
materiales resultaron inadecuados, a causa de su incompatibilidad con el cuerpo humano.
La primera prótesis parcial de hombro fue implantada en París por el cirujano francés
Jules-Émiles Pean en 1893. Este implante estaba fabricado de goma y platino, y fue
retirado dos años después de la cirugía tras la aparición de una infección crónica.
El segundo intento fue realizado por F. Koenig en 1914 [3]. Su prótesis estaba
fabricada de marfil, pero al igual que la prótesis de Jules-Émiles Pean, esta fue retirada al
poco tiempo de la cirugía. Casi 30 años después la era de la auténtica prótesis de hombro
se inicia con Robert y Jean Judet en 1947 [4], sobre todo con Neer [4], quien en 1951 crea
una prótesis humeral simple de metal, esta se moderniza en 1973 al agregarle una pieza
protésica glenoidea, que consta de una articulación intraprotésica entre el sector
mediafisodiafisario del implante y el segmento epifisario.
Capítulo I: Antecedentes
7
Krueger FJ. et al [5] entre los años 1951 y 1952, fabricaron prótesis de resina
polimetilmetacrilato y de vitalio. Al mismo tiempo charles S. Neer II [3], desarrolló la
prótesis moderna monobloque, teniendo como indicación principal la fractura de húmero
proximal. En Europa Scales y Lettin en 1969, Reeves y Jobbins en 1971, Zippel en 1972,
Kölbel en 1972 y Kessel en 1973 [6], al igual que Neer en Estados Unidos, desarollaron
diferentes diseños de prótesis de hombro de resina y vitalio. En esos momentos no había
mucho interés en este tipo de implante a causa de el alto índice de aflojamiento que se
producía en las prótesis de hombros mayor del 50% [1].
Los fenómenos de desgaste que persisten en las prótesis y el material óseo, son
causa de la realización de 25,000 artroplastias de hombro alrededor de un año. Por tal
motivo en este capítulo se presentan el estudio de la historia de las etapas y diagnósticos
para la realización de la prótesis de hombro anatómica, como son: fijación de las prótesis,
componente y cavidad glenoidea, material óseo, recubrimiento y las tomógrafías
computarizadas que son la base del diseño de las prótesis de hombros anatómicas. Los
antecedentes de estas etapas se desarrollan a continuación.
1.3 EVALUACIÓN DEL DISEÑO DE PRÓTESIS MEDIANTE TOMÓGRAFÍAS COMPUTARIZADAS
Sun W. et al [7], en el 2005 utilizó el diseño asistido por computadora mediante
software comerciales CAD, para la representación, análisis y confeccionado de prótesis.
Esto aporto diversos avances en la tecnología de la información y en biomedicina.
Isidro A. [8] en el 2005 elaboró un análisis biomecánico de errores de las prótesis
de hombro como son: errores en la indicación quirúrgica, errores en la técnica quirúrgica,
además de una comparativa con la anatomía. Así mismo, observó fallas en ciertos
biomateriales con los que se elaboran las prótesis. Respecto a los análisis él llegó a la
conclusión que el defecto principal en el diseño de prótesis se refiere a la estabilidad y
movilidad. En cuanto a los materiales y métodos utilizados para los implantes de las
prótesis de hombro, analizaron el posible diagnóstico en algunos de los fracasos hallados
en diferentes tipos de intervenciones.
Capítulo I: Antecedentes
8
Galindo E. et al [9], en el 2006, analizaron y estudiaron las ventajas del
comportamiento biomecánico de la prótesis de hombro KIMS (Kinetic Inverse Movement
Shoulder, por sus siglas en ingles), que utilizaron una articulación intrínseca bipolar
inversa y la compararon con las prótesis Atlas y Neer II. Realizaron ensayos de carga
máxima, fatiga, luxación y movilidad. Las prótesis KIMS superaron en movilidad y
estabilidad a las prótesis Atlas y Neer II. Las prótesis KIMS buscaron disminuir las
principales complicaciones de la artroplastia de hombro como son el aflojamiento aséptico,
la migración proximal con destrucción del manguito rotador y la limitación de movilidad
[10 al 16]
Lam F. et al. [17] en el 2007 hicieron un estudio del hombro normal, las
deficiencias del manguito rotador y las prótesis inversas de hombros, teniendo como
objetivo la restauración cinemática normal de la articulación glenohumeral. En el estudio
que realizaron, como resultados presentaron consideraciones y bases para el diseño de una
artroplastia exitosa de hombro basándose en la relación anatómica normal entre la cabeza
humeral y el glenoide, para que la cinemática normal de la articulación hombro pueda ser
recreada. Dentro de las consideraciones biomecánicas que presentan están: la anatomía de
la cabeza humeral, anatomía de la cavidad glenoidea, ángulo de la diáfisis del cuello
humeral, geometría articular de la articulación glenohumeral, congruencia de la
articulación glenohumeral, fuerzas que actúan en la articulación glenohumeral.
Posteriormente, Terrier A. et al [18,19], a causa del diagnóstico del centro de
rotación de la articulación y la falta de los músculos del manguito rotador, el objetivo de su
estudio fue determinar las fuerzas de la articulación glenohumeral y los músculos de una
prótesis invertida durante la abducción a 30°, 60, 90° y 120° y comparar estas fuerzas con
las de una prótesis anatómica. Estas fueron probadas por un modelo de elemento finito en
3D del hombro. Este modelo fue construido a partir de tomógrafías computarizadas (TC)
del hombro normal de un cadáver e incluyeron los seis músculos principales de la
articulación glenohumeral. La estabilidad natural de la articulación se logró mediante el
embalaje de la cabeza humeral y las superficies de contacto de la articulación
glenohumeral, la abducción fue simulada en el plano escápular controlados por un
Capítulo I: Antecedentes
9
algoritmo de retroalimentación en el software. Se calculó la amplitud, dirección y el punto
de aplicación de la fuerza resultante de la articulación glenohumeral para ambas prótesis.
Ohl X. et al. [20] en el año 2010 llevaron a cabo un estudio tomógráfico en el
remplazo de la cabeza humeral en pacientes con osteoartritis glenohumeral con un
seguimiento de 48 meses a causa de un riesgo de erosión glenoidea y un posible deterioro
de los resultados a largo plazo. En el estudio que realizaron, se utilizó un protocolo de
fluoroscopia radiográfica pre y postoperatorio de rayos X, con un vista anteroposterior en
rotación neutra, una vista lateral y una vista axilar.
Saltzman M. et al. [21] en el 2010 desarrollaron un método para documentar el
cambio en el centro de rotación (COR por sus siglas en ingles) con artroplastia total de
hombro a una serie de hombros con una o dos prótesis diferentes. El método requiere
radiografías estandarizadas en las proyecciones anteroposterior (AP) y axilar [22], con la
ayuda de imágenes y herramientas de sistema de comunicación. Este método se realiza
específicamente para cambiar el COR a una posición que va a mejorar la función del
hombro. Este método se utiliza clínicamente para documentar la posición prequirúrgica y
postquirúrgica de los COR en caso de una artroplastia total de hombro inversa. Los
estudios realizados mediante este método muestran un cambio significativo en el COR en
la posición de la cabeza central con dos diseños diferentes de componentes de hombro total
inverso.
1.4 FIJACION, COMPONENTE Y CAVIDAD GLENOIDEA
Linda A. et al [23], en el 2004, realizaron un análisis de elementos finitos de la
fijación del acromión y sus ventajas de los componentes de la cavidad glenoidea; así como
las propiedades del material óseo. En el modelo incluyeron la carga muscular total y las
fuerzas conjuntas de reacción. Utilizaron fotoelasticidad para obtener datos
experimentales, los cuales fueron comparados con los resultados del análisis de elemento
finito.
Capítulo I: Antecedentes
10
En los modelos de elemento finito hicieron una representación tridimensional de la
escápula que se generó a partir de una tomógrafía computarizada a lo largo del plano
sagital y en la dirección coronal. Las imágenes axiales la reconstruyeron con una malla de
1 mm por lado. Como resultado de este análisis, a causa de las fuerzas que actúan en el
acromión, la fijación no es recomendable para el diseño del componente glenoideo.
Carrión J. et al [24], 2004 Elaboraron un estudio de forma detallada en las
fijaciones ortopédicas que incluyen: materiales metálicos, aleaciones (cemento óseo, acero
inoxidable, zincronium, titanio, cobalto) y polímeros, para las prótesis y tornillos de
fijación. Elaboraron tablas con las propiedades mecánicas y físicas más importantes de
éstos biomateriales así como sus aplicaciones de cada una de ellos.
Matthew L. et al [25], en el 2008, evaluó la fijación del implante de metal de la
base glenoidea mediante prácticas experimentales de laboratorio. Los resultados de este
estudio muestran que el implante de metal de la base glenoidea es sensible a la calidad del
hueso. Con base en los límites de aceptación general de movimiento inducido en la
interface hueso-implante, la base glenoidea de metal ofrece una estabilidad inicial, pero no
a largo plazo.
Chou J. et al, 2009 [26], basándose en la investigación de Matthew L. et al [25],
tomó en cuenta el riesgo de la escápula, ya que presentan muescas y deterioro con los
diseños de glenoesferas existentes, evaluaron el centro de rotación y el rango de
movimiento de 4 diseños diferentes glenoesferas: la concéntrica (de 36 y 44 mm) y la
excéntrica (de 36 y 44 mm). Este estudio se realizó para permitir una mayor amplitud del
movimiento. La Glenoesfera excéntrica con un centro de rotación colocado más hacia
abajo, mostró una mejorar la aducción. Este diseño puede reducir la incidencia clínica de
muescas en la escápula. Los diseños excéntricos tienen un mayor efecto sobre el aumento
de aducción y puede reducir la compresión mecánica y el riesgo de muescas en la escápula.
Favre P. et al [27], 2009, analizaron segmentos musculares y los representaron en
un modelo tridimensional del hombro. Basándose en un software de elementos finitos,
modelaron un diagrama de cuerpo rígido con las fuerzas actuantes por los músculos así
Capítulo I: Antecedentes
11
como su dirección y sentido. Los momentos y las líneas de acción de los músculos, los
calcularon en diferentes posiciones de abducción. De esta manera se tienen las
magnitudes y direcciones en que actúan los músculos principales en la articulación
glenohumeral.
En 2010, de acuerdo a las estadísticas de las dificultades con los implantes
glenoideos, como la exposición de la cavidad glenoidea y fijación del implante, Huguet D.
et al [28] desarrollaron una prótesis de hombro sin vástago. La prótesis anatómica consiste
en un dispositivo de fijación metafisaria con 6 brazos (la corola) y una cabeza humeral fija.
Evaluaron esta prótesis mediante estudios tomógraficos. Confirmaron que este implante
tenían una fijación primaria estable a los tres años de seguimiento. Este concepto permite
una reconstrucción anatómica del húmero proximal con una técnica quirurgica sencilla que
conserva la densidad ósea.
Terrier A. et al [29], en el 2010 diseñaron un equipo experimental con una placa
base instrumentada para medir simultáneamente la fuerza de apriete, par de apriete, y el
ángulo de los tornillos sin bloqueo. Además, la cantidad de volumen de hueso alrededor de
cada tornillo se midió con una microtomógrafía computarizada. Concluyeron que la
fijación de tornillos se puede lograr en tres partes principales de la escápula: la base de la
coracoides, la espina de la escápula y el pilar. La estabilidad de la placa base se ha
mejorado mediante el aumento de la longitud, diámetro y aumento e inclinación de los
tornillos de fijación. La relación de este estudio se puede utilizar en los análisis numéricos
para mejorar la fijación de la placa base del hueso glenoideo [30] , sin embargo después de
un seguimiento de 4 años se noto deterioro en la cavidad glenoidea a causa de la fijación
de los tornillos.
1.5 MATERIAL ÓSEO
Para la determinación de las propiedades mecánicas del hueso, se puede aplicar
directamente el ensayo de tracción, tomando probetas de distintas zonas del hueso para
determinar la ley tensión–deformación; sin embargo, la aplicación del método resulta
complicada por la dificultad de conseguir probetas de tamaño adecuado. Para evitar este
Capítulo I: Antecedentes
12
inconveniente, se han desarrollado distintos dispositivos mecánicos específicos que
permiten determinar las propiedades del hueso con una mayor precisión y repetitividad que
los métodos convencionales.
Las técnicas basadas en ultrasonidos suponen una herramienta muy potente para
determinar las propiedades elásticas de sólidos anisótropos, especialmente cuando el
tamaño de las muestras que se desean ensayar es demasiado pequeño para ensayos
mecánicos, como es el caso del hueso. Pero sigue siendo un método laborioso y muy caro.
A. Matani, K. Terakawa [31] en 2001, muestra que la fractura de los huesos está
muy relacionada con la calidad de vida y es causada principalmente por la osteoporosis.
Por otro lado, los rayos-X y las tomógrafías computarizadas han revelado la
estructura interna del hueso. Los análisis de resolución múltiple de tomografías y rayos-x
son técnicas utilizadas en vértebras de ratas para compararlas con los huesos humanos. En
este estudio, una estimación lineal con los espectros de potencia se llevó a cabo para
estimar la fuerza. La situación de los huesos humanos no puede ser tan diferente de los
huesos de rata. Este método puede ser, por tanto, beneficial para estimar la resistencia
mecánica ósea.
R. Garman, C. Rubin, S. Judex [32] en el 2002, demostraron que la baja magnitud
de los estímulos mecánicos aplicados en las frecuencias altas (45 Hz) durante diez minutos
al día, durante tres semanas, induce una respuesta anabólica en el hueso trabecular a través
de elevadas tasas de formación ósea. En este estudio, examinaron como un protocolo de
diez semanas que implican este estímulo mecánico afecto la cantidad y la arquitectura del
hueso trabecular. Hubo un cambio en la estructura hueso trabecular, y el volumen del
hueso trabecular no se vio afectado, esto a causa de un aumento de la resorción ósea.
Buroni F. et al [33], en 2004 elaboraron un modelo computacional utilizando el
método de elementos finitos con el objeto de cuantificar la distribución de tensiones y
deformaciones alrededor de implantes óseos. Presentaron una metodología que permite la
construcción de modelos de análisis de elementos finitos de piezas óseas a partir de
Capítulo I: Antecedentes
13
estudios de Tomógrafías Computarizadas. La misma incluye la reconstrucción de la
geometría del hueso.
Lopez C. et al [34], presentan un estudio numérico mesomecánico del
comportamiento del hueso trabecular en la cual se emplean mallas 2D generadas
aleatoriamente mediante la teoría de Voronoi-Delaunay. En primer término analizaron el
comportamiento mecánico de geometrías isótropas bajo acciones de tracción y compresión
uniaxial. Los resultados numéricos obtenidos muestran modos de rotura y curvas promedio
de tensión-deformación cuando se considera no linealidad geométrica que permite capturar
los efectos de inestabilidad y pandeo de las trabéculas individuales
Ramos A. et al [35], en 2005 evaluaron y compararon las mallas de elementos
finitos tetraédricos y hexaédricos de geometrías simplificadas, del fémur proximal intacto.
Para el análisis de la geometría real de la porción proximal del fémur, elaboraron un
modelo CAD y las simulaciones que utilizaron se realizaron con HyperWorks ® de un
software de análisis de elementos finitos.Realizaron pruebas de convergencia con
elementos tipo hexaedros (8 y 20 nodos elementos bricks) y tetraédricos (4 y 10 nodos
tetraedros), fueron analizados mediante la comparación de los esfuerzos von Mises y
deformaciones principales en un punto seleccionado del fémur. Las esfuerzos numéricos
también lo compararon con los experimentales para determinar la exactitud de los
elementos finitos. En general, llegaron a la conclusión, para el fémur simplificado, que
elemento lineal tetraédrico permitió resultados más cercanos a los teóricos, pero los
elementos hexaédricos cuadráticos parecen ser más estable y menos influenciados por el
grado de refinamiento de la malla.
Ramírez E. et al [36], en 2007 representaron la estructura trabecular del hueso
esponjoso, mediante celdas de Voronoi, a partir de las coordenadas de los centros de los
poros de la estructura, y posteriormente analizaron mediante el método de elemento finito.
Adicionalmente, llevo el modelo a pruebas de compresión a probetas de hueso trabecular,
tomando los valores de deformación máxima y esfuerzo máximo, lo cual permitió
determinar la rigidez del tejido. Este modelo tiene la ventaja de tomar en cuenta los tres
factores determinantes de cualquier solido celular: las propiedades del tejido, la
Capítulo I: Antecedentes
14
arquitectura trabecular y la densidad o fracción volumétrica. También permite observar el
nivel de esfuerzos a través de la estructura y la secuencia de falla.
Ruiz O. et al [36] en el 2008 Generaron modelos paramétricos del hueso esponjoso
utilizando estructuras de Voronoi. Representaron el tejido esponjoso como arreglo de
barras que se asocian a la distribución trabecular. Con base a las investigaciones de
modelos 2D cuyo espesor trabecular permanece constante y en formas de alambres.
Obtuvieron un modelo que se aproxima a la estructura trabecular mediante discretizaciones
en 2D. La geometría básica en 2D son arreglos de líneas, que con la ayuda de un software
estadístico para generar la estructura de Voronoi y después los resultados se evaluaron
mediante el método de elemento finito.
Bosch‐Cabrera et al [37], en 2011 presentan los resultados del análisis numérico
realizado a un fijador interno del tipo placa DHS (Dinámic Hip Screw por sus siglas en
ingles) y a un fijador externo monolateral con tornillo cefálico RALCA (Rodrigo Álvarez
Cambras), con el propósito de determinar el comportamiento del estado tensiona-
deformación de ambos dispositivos durante la consolidación ósea de fracturas proximales
de cadera, bajo la marcha monopodal del paciente. Para la modelación geométrica de los
dispositivos en cuestión se empleó el paquete de diseño en 3D SolidWorks y la simulación
numérica se realizó con el empleo del paquete de análisis por elementos finitos
Cosmos/Works.
En éstos análisis utilizaron propiedades isotrópicas y anisotrópicas del hueso. Los
resultados muestran valores inferiores de las tensiones máximas en el fijador externo en
comparación con las tensiones que surgen en la placa dinámica bajo la acción de las cargas
actuantes en los modelos, por lo que se concluye que el primero posee mejores
características resistivas, siendo recomendable su uso en pacientes de mayor peso corporal
o que podrían realizar actividades físicas más activas durante su recuperación
postoperatoria.
Capítulo I: Antecedentes
15
1.6 MATERIALES COMPUESTOS
Los materiales con partículas o inclusiones son un caso particular de los materiales
compuestos. Este tipo de materiales presentan una distribución generalmente de tipo
aleatoria de sus inclusiones y diferentes geometrías. Las inclusiones o inhomogeneidades
en los materiales tienen una influencia drástica en su comportamiento mecánico [38].
La interacción entre heterogeneidades tales como grietas, defectos, fibras de
refuerzo o partículas ha sido objeto de investigación y varias metodologías han sido
propuestas para determinar las propiedades efectivas del material compuesto. Una práctica
en mecánica estructural, al tratar de determinar las propiedades mecánicas de materiales
compuestos, es remplazar sus constituyentes no homogéneos con materiales
homogenizados [39], y se han propuesto teorías para determinar teóricamente las
propiedades efectivas de los materiales compuestos, directamente de las propiedades de sus
fases y de la distribución de su microestructura.
La combinación de materiales ha llevado al desarrolló de diversas teorías para
materiales compuestos, a causa de la variedad de aplicaciones de éstos. Entre los trabajos
más destacados se encuentran los de Krener [40] y Kroner [41] que introdujeron el
concepto de homogeneización para materiales de una sola fase.
Yin y Sun [42] utilizando algunos procedimientos de homogeneización llevaron a
cabo investigaciones para inclusiones esféricas con una estructura periódica en la matriz
para determinar y comparar como afectan las propiedades del material.
Eshelby [43] determinó las propiedades del material, considerando la forma de la
inclusión dentro de la matriz y relacionó la deformación de la inclusión con la deformación
de la matriz. Desarrolló el análisis de una inclusión elíptica dentro de una matriz elástica
para determinar cómo afectaba sus propiedades, y propone un método básico para
determinar las propiedades elásticas de un material utilizando un tensor de esfuerzos.
Capítulo I: Antecedentes
16
Budiansky [44] propuso un método de homogenización para las concentraciones
altas, obteniendo un promedio de los efectos particulares de cada inclusión, de acuerdo con
su forma geométrica y obtener las propiedades efectivas del material. Mori Tanaka [53]
por su lado considera la inclusión como el efecto de cambio de la rigidez del material
compuesto para determinar su elasticidad, obteniendo un promedio de las propiedades
elásticas.
En el 2006 Hernández [46], a través de un arreglo de los materiales de contacto y
la introducción de vacios en el cuerpo de la copa acetabular, reduce los esfuerzos de
contacto, la configuración que presentó fue un par de contacto metal-metal, con
recubrimiento de diamante, con lo que se evita la generación de partículas de desgaste de
polietileno y por ende la osteólisis. Posteriormente en el 2010 Abúndez [47] construye un
dispositivo que permite recubrir el hemisferio superior de la cabeza femoral y demuestra el
proceso que este proceso se puede llevar a cabo con un material compuesto reforzado con
inclusiones huecas con la finalidad de amortiguar esfuerzos.
En el 2012 Arellano [48], diseña barras de seguridad de automóviles compactos
aplicando materiales compuestos con inclusiones con lo cual logra redireccionar las cargas
del impacto. También en 2012, Gastélum [49], utiliza las inclusiones elípticas huecas como
refuerzo de la matriz polimérica, logrando direccionar y amortiguar la carga de impacto,
con lo que la placa compuesta absorbe la energía de impacto.
1.7 RECUBRIMIENTO
En 1989 E. Nagy [50], realizó sus primeros trabajos con recubrimientos metálicos y
cerámicos sobre superficies de acero y de vidrio. Su técnica consiste en hacer pasar el
material de aporte en forma de polvo entre una fresa que gira a alta velocidad y la
superficie del material base por recubrir. En 1993 aprovechó los fenómenos que se
producen en el proceso de fricción, y dio a conocer una técnica de aplicación de
recubrimientos a base de diamante; esta técnica que se conoce como triboadhesión o
fricción seca, y su costo es muy inferior a algunos métodos ya establecidos.
Capítulo I: Antecedentes
17
En 1997 J. M. Rodríguez L. [51] con base en la propuesta de Nagy, inició una
investigación referente a recubrimientos por triboadhesión. La primera etapa de esta
investigación consistió en corroborar la viabilidad del recubrimiento. Los materiales que se
utilizaron fueron pintura para cemento como material de aporte y lámina de acero
galvanizado como sustrato. En esta etapa se comprobó la factibilidad del proceso y se
observó el gran potencial de la técnica de recubrimientos superficial por medio de
triboadhesión. Como alternativa para mejorar el comportamiento del material de piezas
mecánicas, propone recubrirlas con la técnica de triboadhesión utilizando para ello un
material que mejore las propiedades del material base.
En el 2001, Soriano, [52] realizó una comparación experimental y teórica de la
distribución de temperaturas en el proceso de triboadhesión sobre una superficie plana. La
temperatura superficial teórica se determinó con base en el modelo de sólido semi-infinito
con flujo de calor constante sobre la superficie, que está en función de la partición de calor
que se genera por fricción.
En el 2004 Ramírez [53] obtiene las señales características de vibración que se
generan durante el funcionamiento de rodamientos de rodillos cilíndricos sin recubrir y
recubiertos por triboadhesión con DLC diamante tipo carbono por sus siglas en inglés. En
el mismo año en CENIDET en el departamento de Tribología-Biomecánica, se realizó un
dispositivo para evaluar el desgaste en prótesis de cadera recubierta con polvo de diamante
sintético por el proceso de triboadhesión, donde se incrementó la resistencia al desgaste
[54]. El estudio de recubrimiento se realizó en engranes a través de un dispositivo que es
capaz de aplicar la técnica de depósito en radios de curvatura interior máximos de 5 cm,
donde se obtuvo un aumento en la rigidez superficial de las piezas recubiertas [55].
También, se desarrolló un dispositivo para deposición por triboadhesión sobre prótesis de
cadera. El trabajo se basó en la determinación de la zona de máxima concentración de
esfuerzos, donde se aplicó el recubrimiento y se demostró que las prótesis recubiertas con
polvo de diamante sintético por el proceso de triboadhesión tienen mayor resistencia al
desgaste [56].
Capítulo I: Antecedentes
18
En el 2005 se evaluaron prótesis dinámicamente con recubrimiento por
triboadhesión, donde se obtuvo una mejora en la resistencia al desgaste en un 315% [57].
En el 2006, se rediseño el componente acetabular en la prótesis de cadera con cambios
geométricos y recubrimiento, los esfuerzos de contacto se redujeron en un 680% [58].
De la información plasmada en este capítulo, se puede las principales causas de
falla de los implantes de prótesis de hombro, así como la propuesta de la solución:
• Aunque las causas de falla del implante pueden clasificarse en mecánicas y
biológicas, los estudios demuestran que ambas tienen un origen mecánico como
son: esfuerzos de contacto, rigidez de los componentes del implante,
incompatibilidad de las propiedades mecánicas con el tejido óseo, aflojamiento
de las prótesis y peso del material de manufactura de las prótesis.
• Desde la aparición de prótesis en articulaciones, la mejora más significativa es
el desarrolló de componentes metálicos de aleación de cobalto-cromo-
molibdeno y en algunas otras la combinación con polietileno de ultra alto peso
molecular. A partir de esto, los esfuerzos se han enfocado al diagnóstico sobre
las fallas del implante, hasta modelos numéricos como deslineamientos,
condiciones extremas de carga y cambios en el perfil de las piezas.
Por lo mencionado anteriormente, se propone diseñar una prótesis de hombro
con alta resistencia al desgaste, incrementada a través del recubrimiento por
triboadhesión y con reducción de esfuerzos de armadura para disminuir el
aflojamiento.
19
1.8 BIBLIOGRAFÍA
[1] F. Handelberg a: Chef de l'unité de pathologie de l'épaule et de traumatologie sportive,
C. Maynou b : Chef du service de chirurgie orthopédique a Service d'orthopédie et de
traumatologie, Universitair Ziekenhuis Brussel, avenue du Laerbeek, 101, B 1090
Bruxelles, Belgique b Hôpital Salengro, CHRU de Lille, 2, avenue Oscar-Lambret, 59037
Lille cedex, France
[2] Scheffer JC, Patte D.Prothèses totales d’épaule EncyclMéd Chir 1987; (Elsevier SAS,
Paris) Techniques chirurgicales – Orthopédie-Traumatologie, 44-294, 8p
[3] Boileau P, Walch G, Noel E, Liotard JP. Neer shoulder prosthesis: Outcome
according to the shoulder disease. Rev Rhum [engl ed] 1994; 61: 537-547
[4] Heuleu JN, Breton G, Courtillon A, Darnault A, Nakul M. La rééducation des
prothèses d’épaule : notre expérience à partir de 28 cas. Épaule et médecine de Reed.
Collection : Pathologie locomotrice. Paris: Masson, 1994; 383-390
[5] Krueger FJ. et al. A case Vitalium replica arthroplasty on the shoulder. A case report
of aseptic necrosis of the proximal end of the humerus. Surgery 1951, 30: 1005-1022
[6] Richard A., Judet R & McLaughlin HL. Fracture of the neck of the humerus with
dislocation of the head fragment. Am J Surg 1953, 85:252-258
[7] Sun W., Starly B., Nam J., Darling A. Bio-CAD modeling and its applications in
computer-aided tissue engineering. Drexel University, Philadelphia USA, 2005
[8] Isidro A. Análisis biomecánico de algunos errores de las prótesis de hombro. Hospital
Universitari Sagrat Cor. Barcelona, 2005
[9] Galindo E., Martens, Andujar, Rodríguez E. Prótesis de hombro KIMS. Estudio
experimental. Instituto madrileño de Traumatología. Madrid, 2006.
[10] Terrier A, et al. Proceedings of WCB, Munich, Abstract 5740 (S82), 2006.
[11] Isidro A., 2005, pp. 40-47 Análisis biomecánico de algunos errores de las prótesis de
hombro
[12] E. Galindo-Martens, E. Galindo-Andujar y E.C. Rodríguez-Merchán, 2005.
Prótesis de hombro «KIMS». Estudio experimental
[13] Grammont P, Trouilloud P, Laffay JP, Deries X. Etude et realization d’une
nouvelle prothèse d’épaule. Rheumatologie. 1987;39:407-18.
20
[14]Grammont P, Baulot E. Delta shoulder prosthesis for rotator cuff rupture.
Orthopedics. 1993;16:65-8.
[15]Grammont P, Baulot E. La prothèse d’épaule dans les ruptures irréparables de la
coiffe des rotateurs. En: Pathologie de la coiffe des rotateurs de l’épaule. Paris: Masson
edition; 1993. p. 336-41.
[16] Boileau P, Walch G. The three-dimensional Geometry of the proximal humerus:
Implications fot Surgical Technique and Prosthetic Design. J Bone Joint Surg Br.
1997;75B 5:857-65.
[17] F. Lama,_, D.N. Bhatiaa, S.B. Mostofib, K. van Rooyena, J.F. de Beera, 2007.
Biomechanical considerations of the normal and rotator cuff deficient shoulders and the
reverse shoulder prosthesis
[18] A Terrier, A Reist, F. Merlini1 and A Farron, 2007. JOINT AND MUSCLES
FORCES IN REVERSED AND ANATOMIC SHOULDER PROSTHESES
[19] Boileau P, et al. J Shoulder Elbow Surg. 15, 527-540, 2006
[20] Ohl X., Nérot C., Saddiki R., Dehoux E. 2010, Shoulder hemi arthroplasty
radiological and clinical outcomes at more than two years follow-up
[21] Matthew D. Saltzman, MD, Deana M. Mercer, MD, Winston J. Warme, MD,
Alexander L. Bertelsen, PA-C, Frederick A. Matsen III, MD, 2010. A method for
documenting the change in center of rotation with reverse total shoulder arthroplasty and
its application to a consecutive series of 68 shoulders having reconstruction with one of
two different reverse prostheses
[22]. Matsen FA III, Lippitt SB, Sidles JA, Harryman DT II. Práctical evaluation and
management of the shoulder. Philadelphia: Saunders; 1994. p. 242.
[23] Linda A., Murphy, Patrick J., Prendergast. Acromión-fixation of glenoid
components in total shoulder arthroplasty. Trinity college, Dublin, Ireland, 2004.
[24] Jennifer Carrión, Jessica Colón, María González, Jessica Rivera and Gerardo
Rodríguez, 2004. BIOMECHANICS OF ORTHOPAEDIC FIXATIONS
[25] Matthew L. Mroczkowski M.S. 2008 INITIAL FIXATION OF THE
TRABECULAR METAL REVERSE SHOULDER GLENOID BASE PLATE IMPLANT
[26]Derek C.,Xiaojun Liu., analysis of slip flow in microchanels. University of
California. ASME J, 2003
21
[27] Phillippe Favre, Jess G. Snedeker and Christian Gerber, 2009. Numerical
modeling of the shoulder for clinical applications. Zurich, Switzerland
[28] Figgie HE III, Inglis AE, Golberg VM, Ranawat CS, Figgie MP, Wile JM. An
analysis of factors affecting the long term results of total shoulder arthroplasty in
inflamatory arthritis. J Arthroplasty. 1998;3:123-30.
[29] A. Terrier, S.H. Kochbeck , F. Merlini, M. Gortchacow, D.P. Pioletti, A. Farron,
2010. Tightening force and torque of nonlocking screws in a reverse shoulder prosthesis
[30] Neer CS. Glenohumeral arthroplasty design. Shoulder reconstruction. 1st ed.
Philadelphia: Saunders; 1990. p. 146-60.
[31] Matani A., Terakawa K. Bone mechanical strength estimation from micro x-ray ct
image. University of Tokyo, Tokyo, Japan. 2001.
[32] Abundez Pliego A., Diseño de un dispositivo para deposición en piezas mecánicas
pequeñas por triboadhesion. Tesis de Maestría, Cuernavaca Morelos, México; CENIDET,
2004.
[33] Edgar Isaac Ramírez D., Armando Ortiz P., Rafael Shouwenaars F. y Osvaldo
Ruiz C. Modelado de hueso trabecular mediante paquetería de elemento finito basándose
en estructuras de Voronoi.
[34] López C.M., Roa O., Carol I. Estudio a nivel mesomecánico de la fractura del
hueso trabecular. ETSECCPB, Universitat Politècnica de Catalunya, Barcelona.
[35] Ramos A., Simoes J.A. Tetrahedral versus hexahedral finite elements in numerical
modelling of the proximal femur. Departamento de Engenharia Mecanica, Universidade de
Aveiro, 3810-193 Aveiro, Portugal.
[36] Edgar Isaac Ramírez D., Armando Ortiz P., Rafael Shouwenaars F. y Osvaldo
Ruiz C. Modelado de hueso trabecular mediante paquetería de elemento finito basándose
en estructuras de Voronoi. Departamento de Manufactura y Materiales de la Facultad de
Ingeniería, Universidad Nacional Autónoma de México.
[37] Jorge Bosch‐Cabrera, Roberto Estrada‐Cinqualbres, Yoan Ramos‐Botello.
Análisis numérico comparativo de fijadores para el tratamiento de fracturas proximales del
fémur. Universidad de Granma. Facultad de Ingeniería, Cuba.
[38] Mark Kachanov and Igor Sevostianov, 2004, On quantitative characterization of
microstructure and effective properties, int J. of Solid and Structures, Vol 42, pp 309-336
22
[39] Lucas Collini, 2004, Micromechanical modeling of elasto-plastic behavior of
heterogeneous nodular cast iron, tesis doctoral, Universita Degli Studi Di Parma, Italia.
[40] Kroner, E. Computatin od the elastic constants of polycristals from constants of
single crystals. Z. Phys. 151, p 504-518. 1958
[41] Kerner, E.H. The elastic and thermoplastic proprieties of composite media. Proc.
Phys. Soc, vol. 69, p 808. 1956
[42] H. M. Yin, L. Z. Sun, Elastic modeling of periodic composites with particle
interactions, Philosophical Magazine Letters, vol. 85, no. 4, p 163-173. 2005
[43] Eshelby, J.D., The determination of the elastic field of an ellipsoidal inclusion and
related problems. Proc, Royal Soc. of London, Ser. A, vol. 241, p 376. 1957
[44] Budiansky, B., On the elastic module of some heterogeneous materials, J. Mech .
Phys. Solids, vol. 13, p 233. 1965
[45] Mori T., Tanaka K., Average Stress in Matrix and Average Elastic Energy of
Materials with Misfitting Inclusions . Act metallurgical, vol. 21, p 571-574. 1973.
[46] Abúndez Pliego Arturo, “Desarrollo de un sistema compuesto, amortiguado y de
bajo par friccional para la aplicación de prótesis de rodilla”, Tesis de doctorado,
Cuernavaca Morelos México, Cenidet, 2010.
[47] Hernandez A. “Diseño del acetábulo y copa acetabular de la prótesis de cadera tipo
Charnley para la disminución de bebris”, Tesis de Maestría, Cuernavaca Morelos México,
Cenidet, 2006.
[48] Arellano Cabrera José Antonio, “Diseño de estructuras de materiales polimericos
compuéstos para su aplicación en la industria automotriz”, Tesis de Doctorado,
Cuernavaca Morelos México, Cenidet, 2012.
[49] Gastélum Ordoñéz Ariel Ulysses, “Desarrollo de una placa de polímero compuesta
de alta tolerancia al daño”, Tesis de Maestría, Cuernavaca Morelos México, Cenidet, 2012.
[50] Boileau P, Walch G. The three-dimensional Geometry of the proximal humerus:
Implications fot Surgical Technique and Prosthetic Design. J Bone Joint
[51] Rodríguez L. J. proceso para recubrir placas metálicas con óxidos metálicos por
fricción seca, México: CENIDET proyecto CoSNET, 1997
[52] Rodríguez L., Soriano G., Colin O. Generación de calor y el proceso de
triboadhesión. Vi reunión internacional de ingeniería mecánica, S.L.P. México. Memoria
técnica 2000.
23
[53] Ramirez L. J. proceso para recubrir placas metálicas con óxidos metálicos por
fricción seca, México: CENIDET proyecto CoSNET, 1997
[54] Abundez Pliego A., Diseño de un dispositivo para deposición en piezas mecánicas
pequeñas por triboadhesion. Tesis de Maestría, Cuernavaca Morelos, México; CENIDET,
2004.
[55] Navarro T. J., Efecto del recubrimiento por triboadhesion de DCL y su respuesta
dinámica en rodamientos y engranes rectos. Tesis de Maestría, Cuernavaca Morelos,
México; CENIDET, 2004
[56] Sosa Gonzales W., Diseño de un mecanismo para la evaluación del desgaste en
prótesis de cadera. Tesis de Maestría, Cuernavaca Morelos, México; CENIDET, 2004
[57] Tolosa Mata D. Caracterización dinámica de prótesis de cadera recubiertas mediante
el proceso de triboadhesion. Tesis de Maestría, Cuernavaca Morelos, México; CENIDET,
2005
[58] Hernández Gonzales A., Rediseño del acetábulo y copa acetabular de la prótesis de
cadera tipo charnley para la disminución de debris. Tesis de Maestría, Cuernavaca
Morelos, México; CENIDET, 2006
Capítulo II: Teoría básica
24
Capítulo 2
Teoría Básica 2.1 INTRODUCCIÓN
En este capítulo se presenta la teoría y conceptos básicos relacionados con el desarrollo
de la tesis tales como: funcionamiento de la articulación glenohumeral, huesos, músculos y
secciones en que está dividida la articulación glenohumeral. Así mismo los diferentes tipos y
propiedades mecánicas y elásticas de los biomateriales comúnmente usados, también las
propiedades del UHMWP (polietileno de ultra alto peso molecular), que es el material que se
utilizara para la prótesis propuesta. Por otra parte, la funcionalidad de las tomografías por el
cual se obtiene la geometría 3D del húmero. Por último los diferentes tipos de recubrimientos
y el proceso de triboadhesión con el cual se incrementa la alta resistencia al desgaste de la
prótesis y reduce los esfuerzos de armadura para disminuir el aflojamiento.
Capítulo II: Teoría básica
25
2.2 ANATOMIA Y BIOMECÁNICA DEL HOMBRO
2.2.1 Anatomía
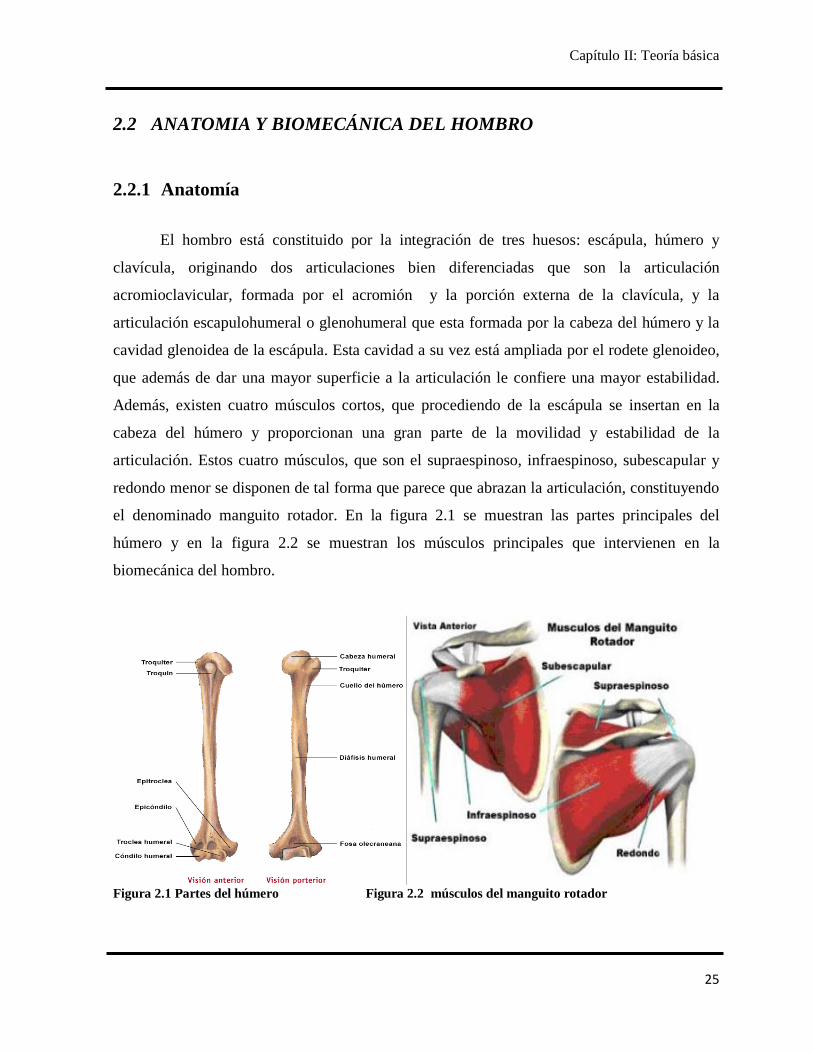
El hombro está constituido por la integración de tres huesos: escápula, húmero y
clavícula, originando dos articulaciones bien diferenciadas que son la articulación
acromioclavicular, formada por el acromión y la porción externa de la clavícula, y la
articulación escapulohumeral o glenohumeral que esta formada por la cabeza del húmero y la
cavidad glenoidea de la escápula. Esta cavidad a su vez está ampliada por el rodete glenoideo,
que además de dar una mayor superficie a la articulación le confiere una mayor estabilidad.
Además, existen cuatro músculos cortos, que procediendo de la escápula se insertan en la
cabeza del húmero y proporcionan una gran parte de la movilidad y estabilidad de la
articulación. Estos cuatro músculos, que son el supraespinoso, infraespinoso, subescapular y
redondo menor se disponen de tal forma que parece que abrazan la articulación, constituyendo
el denominado manguito rotador. En la figura 2.1 se muestran las partes principales del
húmero y en la figura 2.2 se muestran los músculos principales que intervienen en la
biomecánica del hombro.
Figura 2.1 Partes del húmero Figura 2.2 músculos del manguito rotador
Capítulo II: Teoría básica
26
2.2.2 Biomecánica y rango de movilidad articular
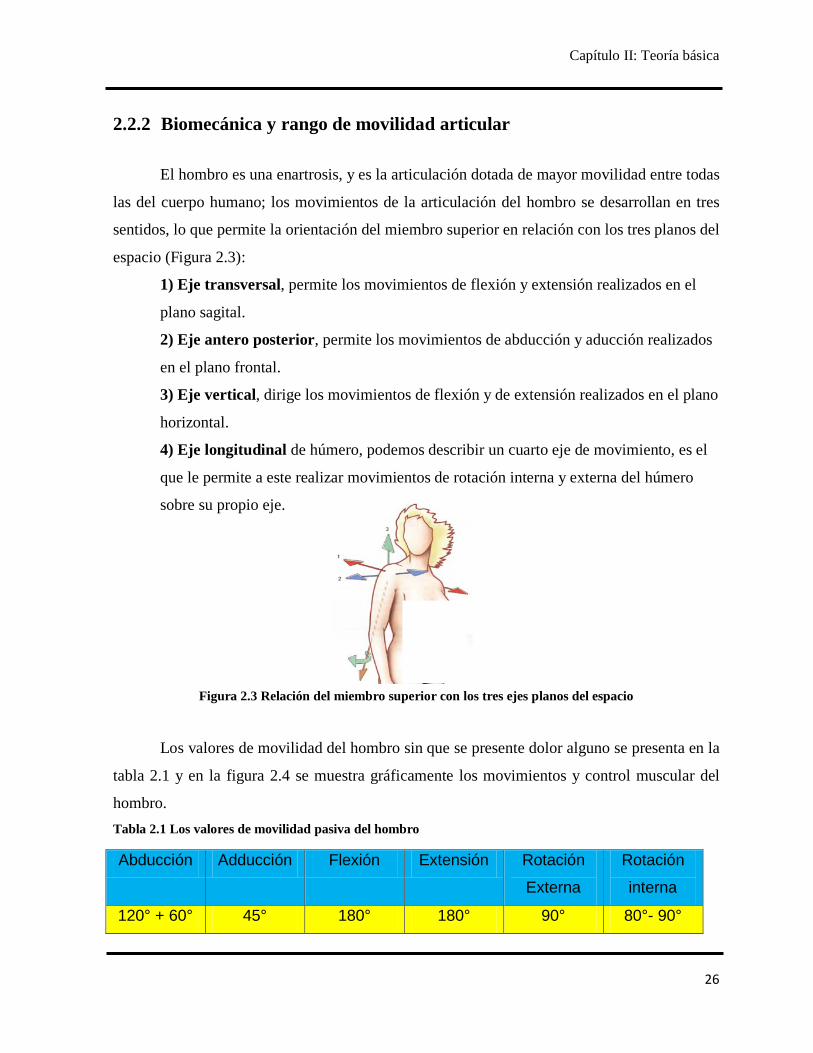
El hombro es una enartrosis, y es la articulación dotada de mayor movilidad entre todas
las del cuerpo humano; los movimientos de la articulación del hombro se desarrollan en tres
sentidos, lo que permite la orientación del miembro superior en relación con los tres planos del
espacio (Figura 2.3):
1) Eje transversal, permite los movimientos de flexión y extensión realizados en el
plano sagital.
2) Eje antero posterior, permite los movimientos de abducción y aducción realizados
en el plano frontal.
3) Eje vertical, dirige los movimientos de flexión y de extensión realizados en el plano
horizontal.
4) Eje longitudinal de húmero, podemos describir un cuarto eje de movimiento, es el
que le permite a este realizar movimientos de rotación interna y externa del húmero
sobre su propio eje.
Figura 2.3 Relación del miembro superior con los tres ejes planos del espacio
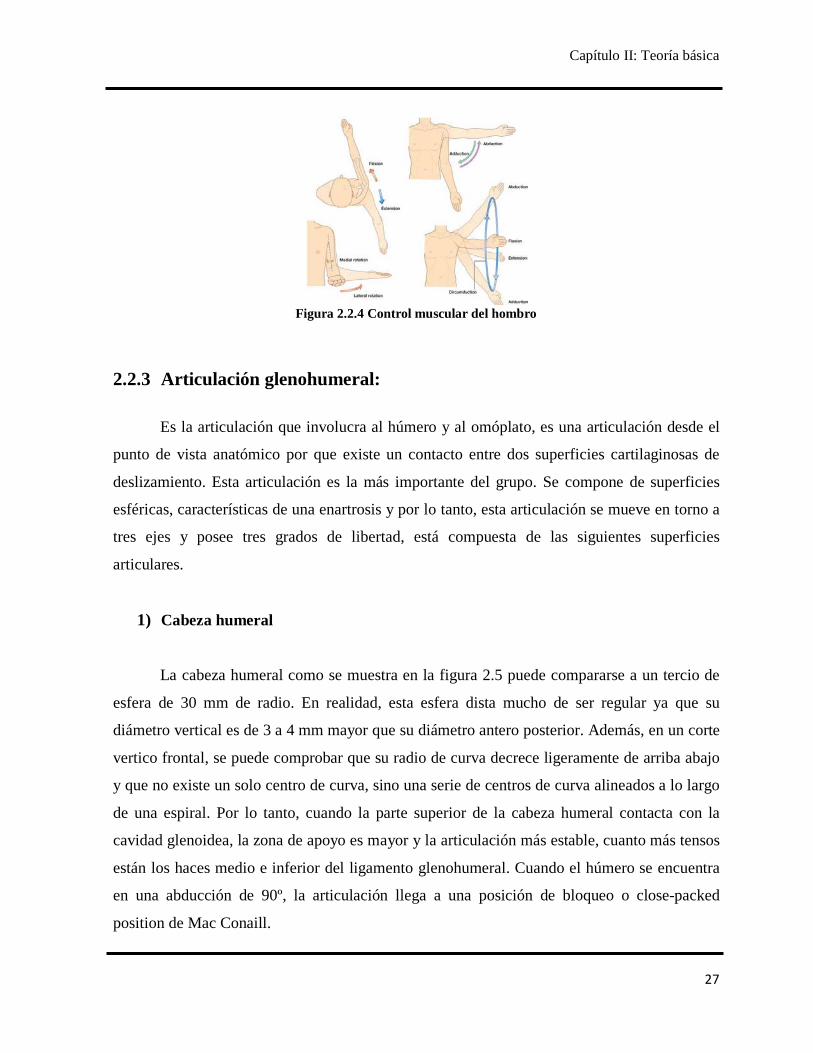
Los valores de movilidad del hombro sin que se presente dolor alguno se presenta en la
tabla 2.1 y en la figura 2.4 se muestra gráficamente los movimientos y control muscular del
hombro. Tabla 2.1 Los valores de movilidad pasiva del hombro
Abducción Adducción Flexión Extensión Rotación
Externa
Rotación
interna
120° + 60° 45° 180° 180° 90° 80°- 90°
Capítulo II: Teoría básica
27
Figura 2.2.4 Control muscular del hombro
2.2.3 Articulación glenohumeral: Es la articulación que involucra al húmero y al omóplato, es una articulación desde el
punto de vista anatómico por que existe un contacto entre dos superficies cartilaginosas de
deslizamiento. Esta articulación es la más importante del grupo. Se compone de superficies
esféricas, características de una enartrosis y por lo tanto, esta articulación se mueve en torno a
tres ejes y posee tres grados de libertad, está compuesta de las siguientes superficies
articulares.
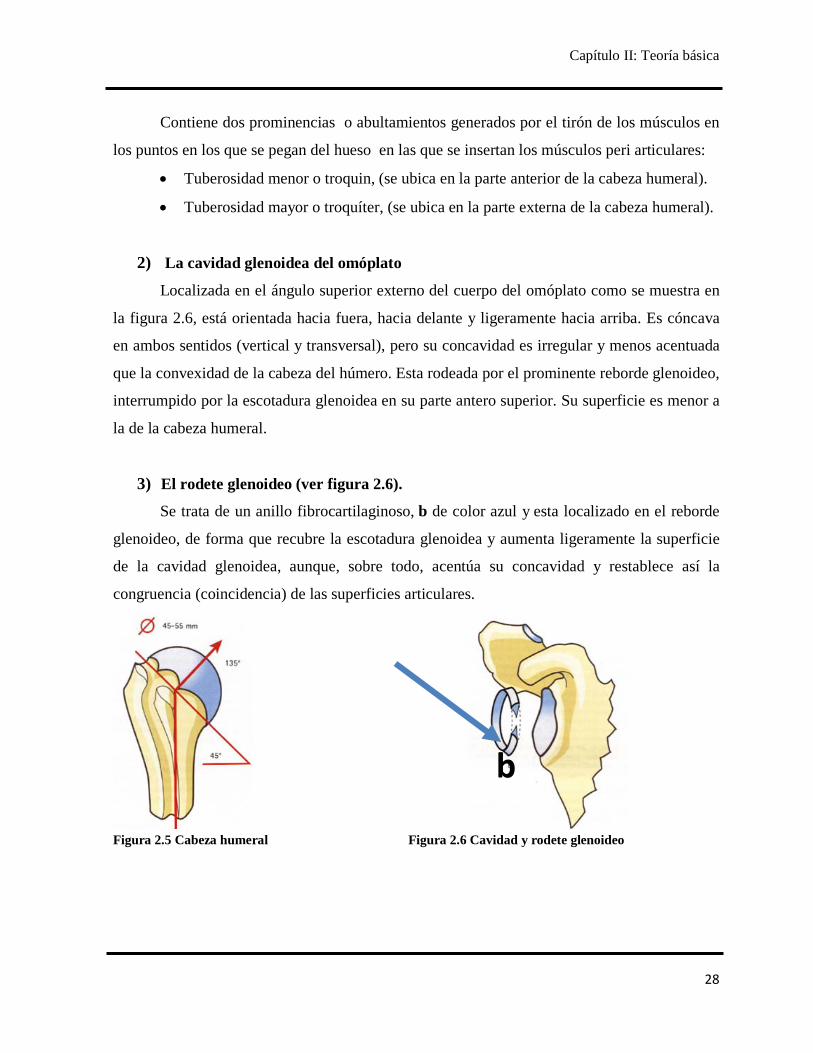
1) Cabeza humeral
La cabeza humeral como se muestra en la figura 2.5 puede compararse a un tercio de
esfera de 30 mm de radio. En realidad, esta esfera dista mucho de ser regular ya que su
diámetro vertical es de 3 a 4 mm mayor que su diámetro antero posterior. Además, en un corte
vertico frontal, se puede comprobar que su radio de curva decrece ligeramente de arriba abajo
y que no existe un solo centro de curva, sino una serie de centros de curva alineados a lo largo
de una espiral. Por lo tanto, cuando la parte superior de la cabeza humeral contacta con la
cavidad glenoidea, la zona de apoyo es mayor y la articulación más estable, cuanto más tensos
están los haces medio e inferior del ligamento glenohumeral. Cuando el húmero se encuentra
en una abducción de 90º, la articulación llega a una posición de bloqueo o close-packed
position de Mac Conaill.
Capítulo II: Teoría básica
28
Contiene dos prominencias o abultamientos generados por el tirón de los músculos en
los puntos en los que se pegan del hueso en las que se insertan los músculos peri articulares:
• Tuberosidad menor o troquin, (se ubica en la parte anterior de la cabeza humeral).
• Tuberosidad mayor o troquíter, (se ubica en la parte externa de la cabeza humeral).
2) La cavidad glenoidea del omóplato
Localizada en el ángulo superior externo del cuerpo del omóplato como se muestra en
la figura 2.6, está orientada hacia fuera, hacia delante y ligeramente hacia arriba. Es cóncava
en ambos sentidos (vertical y transversal), pero su concavidad es irregular y menos acentuada
que la convexidad de la cabeza del húmero. Esta rodeada por el prominente reborde glenoideo,
interrumpido por la escotadura glenoidea en su parte antero superior. Su superficie es menor a
la de la cabeza humeral.
3) El rodete glenoideo (ver figura 2.6).
Se trata de un anillo fibrocartilaginoso, b de color azul y esta localizado en el reborde
glenoideo, de forma que recubre la escotadura glenoidea y aumenta ligeramente la superficie
de la cavidad glenoidea, aunque, sobre todo, acentúa su concavidad y restablece así la
congruencia (coincidencia) de las superficies articulares.
Figura 2.5 Cabeza humeral Figura 2.6 Cavidad y rodete glenoideo
b
Capítulo II: Teoría básica
29
2.3 ARTROSIS
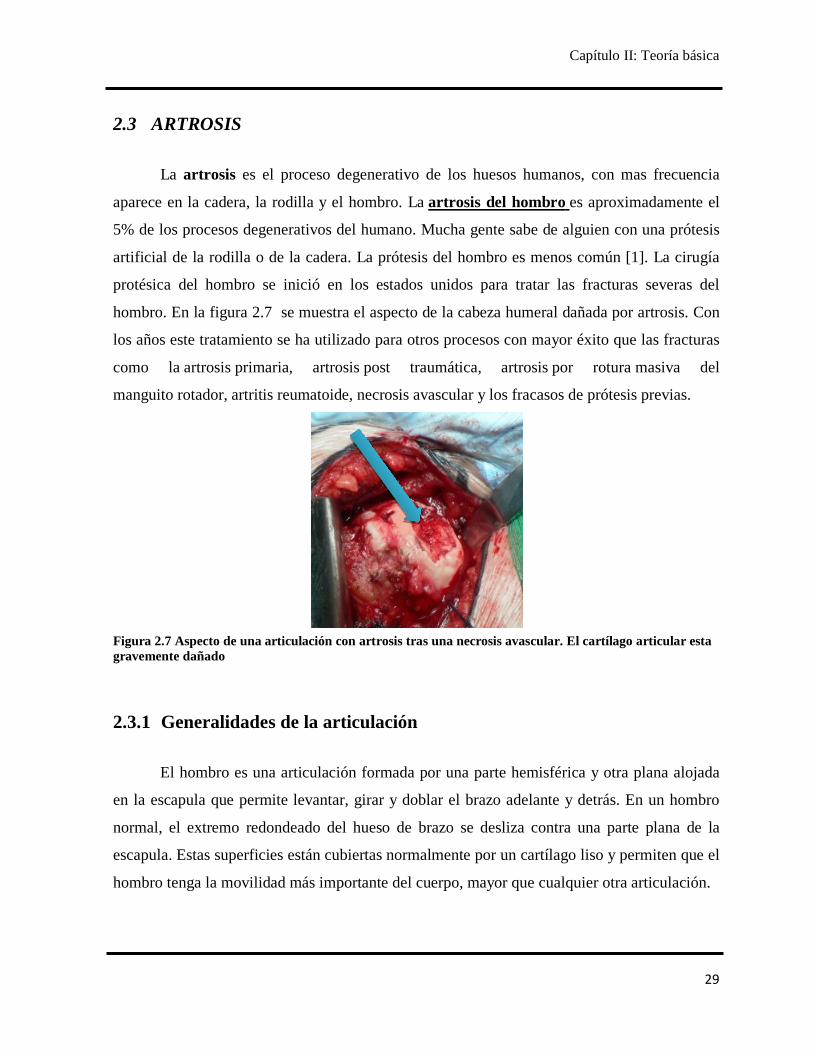
La artrosis es el proceso degenerativo de los huesos humanos, con mas frecuencia
aparece en la cadera, la rodilla y el hombro. La artrosis del hombro es aproximadamente el
5% de los procesos degenerativos del humano. Mucha gente sabe de alguien con una prótesis
artificial de la rodilla o de la cadera. La prótesis del hombro es menos común [1]. La cirugía
protésica del hombro se inició en los estados unidos para tratar las fracturas severas del
hombro. En la figura 2.7 se muestra el aspecto de la cabeza humeral dañada por artrosis. Con
los años este tratamiento se ha utilizado para otros procesos con mayor éxito que las fracturas
como la artrosis primaria, artrosis post traumática, artrosis por rotura masiva del
manguito rotador, artritis reumatoide, necrosis avascular y los fracasos de prótesis previas.
Figura 2.7 Aspecto de una articulación con artrosis tras una necrosis avascular. El cartílago articular esta gravemente dañado
2.3.1 Generalidades de la articulación
El hombro es una articulación formada por una parte hemisférica y otra plana alojada
en la escapula que permite levantar, girar y doblar el brazo adelante y detrás. En un hombro
normal, el extremo redondeado del hueso de brazo se desliza contra una parte plana de la
escapula. Estas superficies están cubiertas normalmente por un cartílago liso y permiten que el
hombro tenga la movilidad más importante del cuerpo, mayor que cualquier otra articulación.
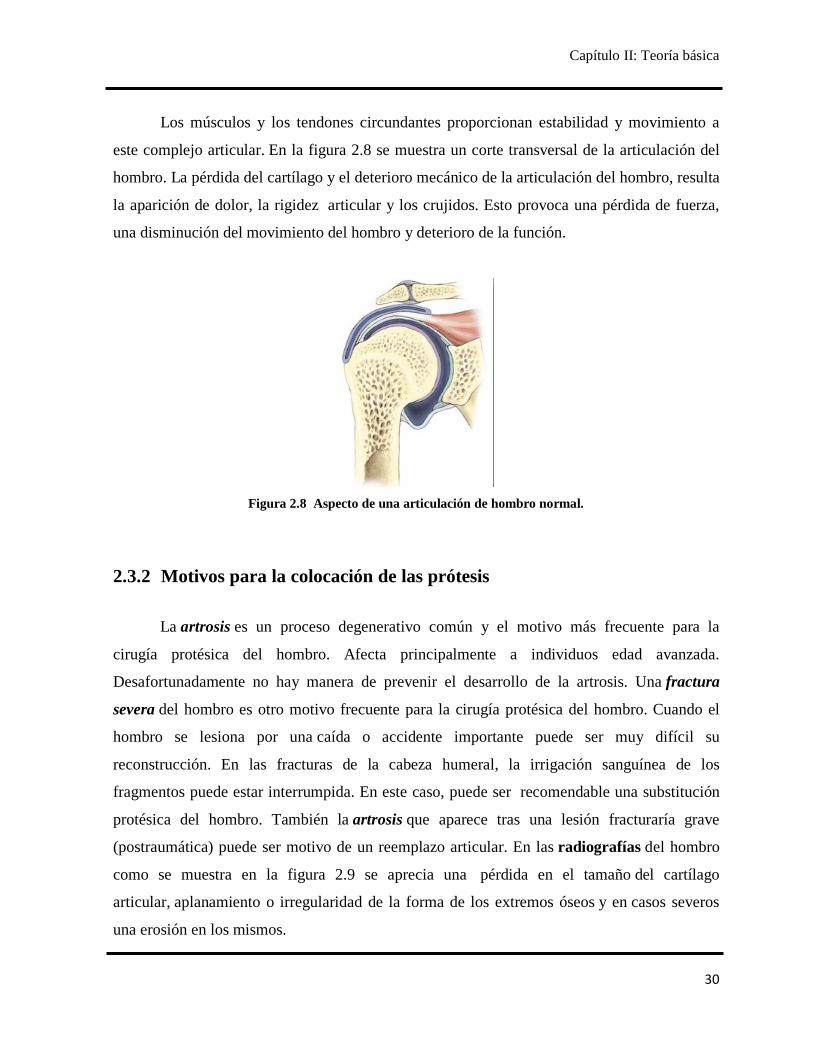
Capítulo II: Teoría básica
30
Los músculos y los tendones circundantes proporcionan estabilidad y movimiento a
este complejo articular. En la figura 2.8 se muestra un corte transversal de la articulación del
hombro. La pérdida del cartílago y el deterioro mecánico de la articulación del hombro, resulta
la aparición de dolor, la rigidez articular y los crujidos. Esto provoca una pérdida de fuerza,
una disminución del movimiento del hombro y deterioro de la función.
Figura 2.8 Aspecto de una articulación de hombro normal.
2.3.2 Motivos para la colocación de las prótesis
La artrosis es un proceso degenerativo común y el motivo más frecuente para la
cirugía protésica del hombro. Afecta principalmente a individuos edad avanzada.
Desafortunadamente no hay manera de prevenir el desarrollo de la artrosis. Una fractura
severa del hombro es otro motivo frecuente para la cirugía protésica del hombro. Cuando el
hombro se lesiona por una caída o accidente importante puede ser muy difícil su
reconstrucción. En las fracturas de la cabeza humeral, la irrigación sanguínea de los
fragmentos puede estar interrumpida. En este caso, puede ser recomendable una substitución
protésica del hombro. También la artrosis que aparece tras una lesión fracturaría grave
(postraumática) puede ser motivo de un reemplazo articular. En las radiografías del hombro
como se muestra en la figura 2.9 se aprecia una pérdida en el tamaño del cartílago
articular, aplanamiento o irregularidad de la forma de los extremos óseos y en casos severos
una erosión en los mismos.
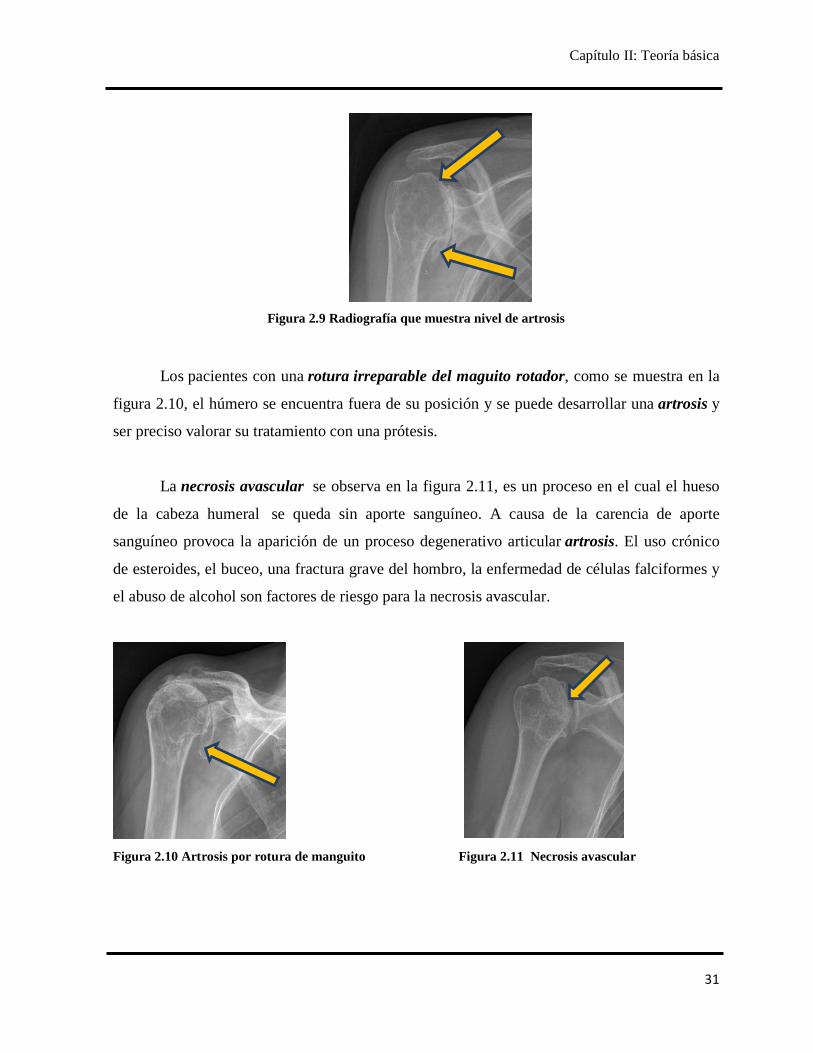
Capítulo II: Teoría básica
31
Figura 2.9 Radiografía que muestra nivel de artrosis
Los pacientes con una rotura irreparable del maguito rotador, como se muestra en la
figura 2.10, el húmero se encuentra fuera de su posición y se puede desarrollar una artrosis y
ser preciso valorar su tratamiento con una prótesis.
La necrosis avascular se observa en la figura 2.11, es un proceso en el cual el hueso
de la cabeza humeral se queda sin aporte sanguíneo. A causa de la carencia de aporte
sanguíneo provoca la aparición de un proceso degenerativo articular artrosis. El uso crónico
de esteroides, el buceo, una fractura grave del hombro, la enfermedad de células falciformes y
el abuso de alcohol son factores de riesgo para la necrosis avascular.
Figura 2.10 Artrosis por rotura de manguito Figura 2.11 Necrosis avascular
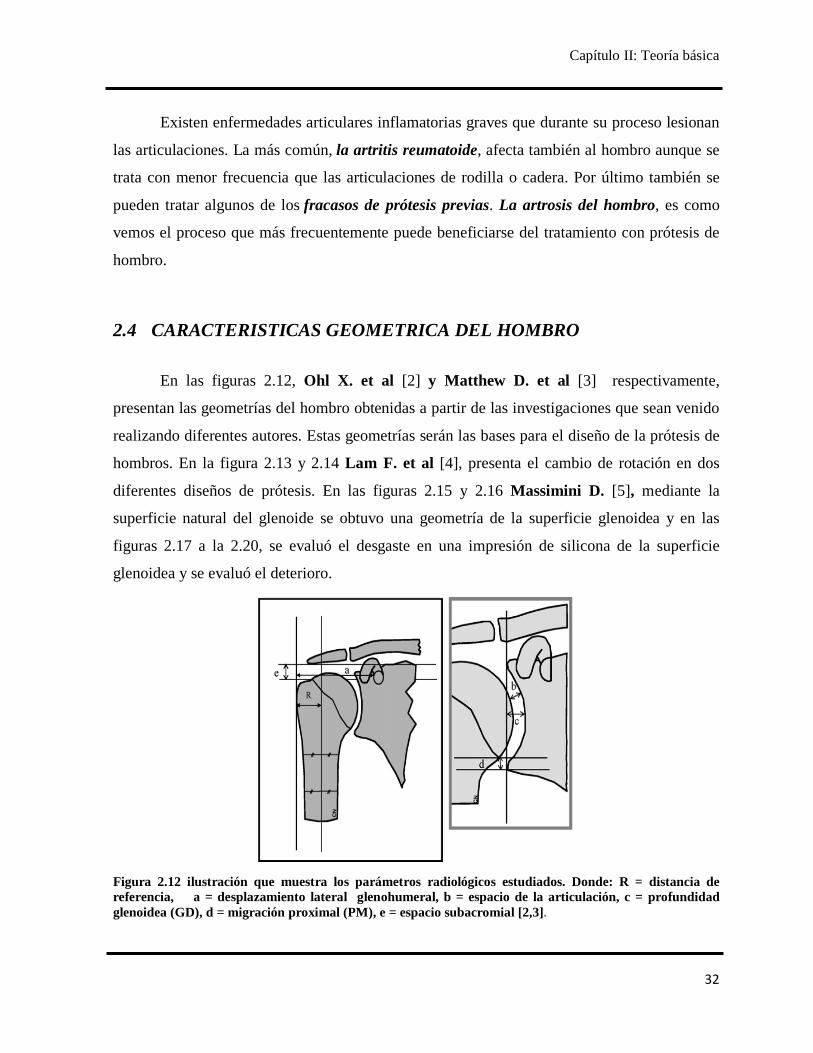
Capítulo II: Teoría básica
32
Existen enfermedades articulares inflamatorias graves que durante su proceso lesionan
las articulaciones. La más común, la artritis reumatoide, afecta también al hombro aunque se
trata con menor frecuencia que las articulaciones de rodilla o cadera. Por último también se
pueden tratar algunos de los fracasos de prótesis previas. La artrosis del hombro, es como
vemos el proceso que más frecuentemente puede beneficiarse del tratamiento con prótesis de
hombro.
2.4 CARACTERISTICAS GEOMETRICA DEL HOMBRO
En las figuras 2.12, Ohl X. et al [2] y Matthew D. et al [3] respectivamente,
presentan las geometrías del hombro obtenidas a partir de las investigaciones que sean venido
realizando diferentes autores. Estas geometrías serán las bases para el diseño de la prótesis de
hombros. En la figura 2.13 y 2.14 Lam F. et al [4], presenta el cambio de rotación en dos
diferentes diseños de prótesis. En las figuras 2.15 y 2.16 Massimini D. [5], mediante la
superficie natural del glenoide se obtuvo una geometría de la superficie glenoidea y en las
figuras 2.17 a la 2.20, se evaluó el desgaste en una impresión de silicona de la superficie
glenoidea y se evaluó el deterioro.
Figura 2.12 ilustración que muestra los parámetros radiológicos estudiados. Donde: R = distancia de referencia, a = desplazamiento lateral glenohumeral, b = espacio de la articulación, c = profundidad glenoidea (GD), d = migración proximal (PM), e = espacio subacromial [2,3].
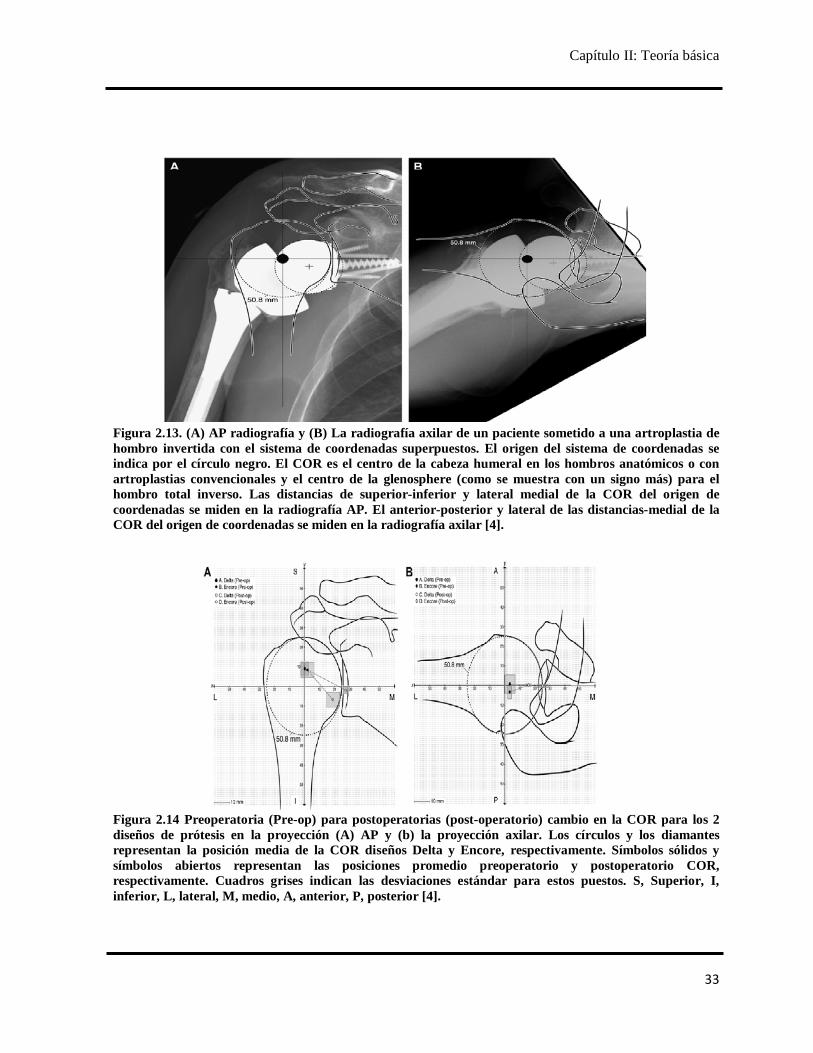
Capítulo II: Teoría básica
33
Figura 2.13. (A) AP radiografía y (B) La radiografía axilar de un paciente sometido a una artroplastia de hombro invertida con el sistema de coordenadas superpuestos. El origen del sistema de coordenadas se indica por el círculo negro. El COR es el centro de la cabeza humeral en los hombros anatómicos o con artroplastias convencionales y el centro de la glenosphere (como se muestra con un signo más) para el hombro total inverso. Las distancias de superior-inferior y lateral medial de la COR del origen de coordenadas se miden en la radiografía AP. El anterior-posterior y lateral de las distancias-medial de la COR del origen de coordenadas se miden en la radiografía axilar [4].
Figura 2.14 Preoperatoria (Pre-op) para postoperatorias (post-operatorio) cambio en la COR para los 2 diseños de prótesis en la proyección (A) AP y (b) la proyección axilar. Los círculos y los diamantes representan la posición media de la COR diseños Delta y Encore, respectivamente. Símbolos sólidos y símbolos abiertos representan las posiciones promedio preoperatorio y postoperatorio COR, respectivamente. Cuadros grises indican las desviaciones estándar para estos puestos. S, Superior, I, inferior, L, lateral, M, medio, A, anterior, P, posterior [4].
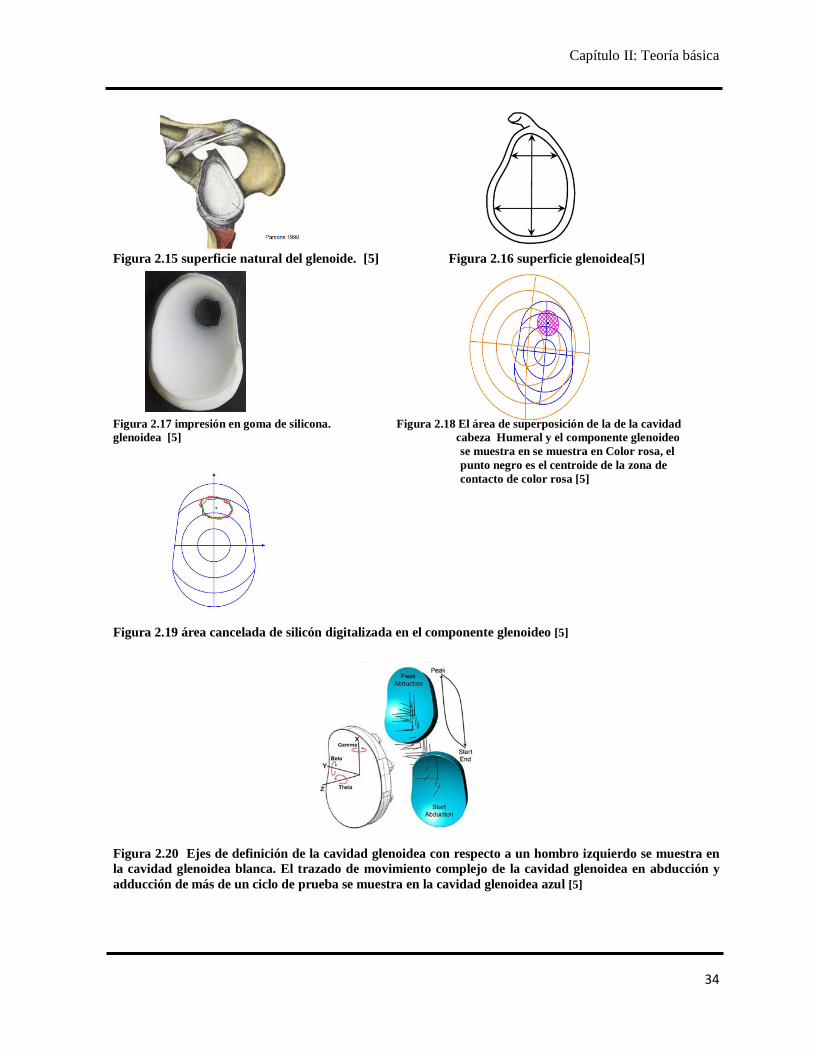
Capítulo II: Teoría básica
34
Figura 2.15 superficie natural del glenoide. [5] Figura 2.16 superficie glenoidea[5]
Figura 2.17 impresión en goma de silicona. Figura 2.18 El área de superposición de la de la cavidad glenoidea [5] cabeza Humeral y el componente glenoideo se muestra en se muestra en Color rosa, el punto negro es el centroide de la zona de contacto de color rosa [5]
Figura 2.19 área cancelada de silicón digitalizada en el componente glenoideo [5]
Figura 2.20 Ejes de definición de la cavidad glenoidea con respecto a un hombro izquierdo se muestra en la cavidad glenoidea blanca. El trazado de movimiento complejo de la cavidad glenoidea en abducción y adducción de más de un ciclo de prueba se muestra en la cavidad glenoidea azul [5]
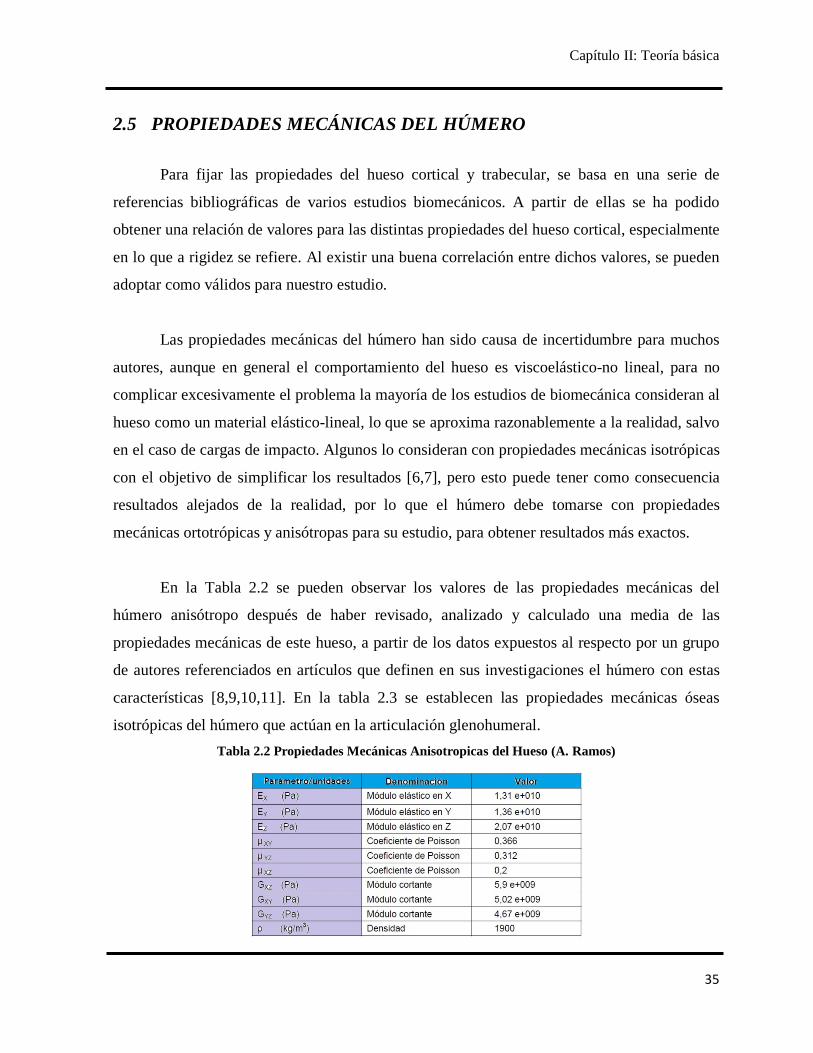
Capítulo II: Teoría básica
35
2.5 PROPIEDADES MECÁNICAS DEL HÚMERO
Para fijar las propiedades del hueso cortical y trabecular, se basa en una serie de
referencias bibliográficas de varios estudios biomecánicos. A partir de ellas se ha podido
obtener una relación de valores para las distintas propiedades del hueso cortical, especialmente
en lo que a rigidez se refiere. Al existir una buena correlación entre dichos valores, se pueden
adoptar como válidos para nuestro estudio.
Las propiedades mecánicas del húmero han sido causa de incertidumbre para muchos
autores, aunque en general el comportamiento del hueso es viscoelástico-no lineal, para no
complicar excesivamente el problema la mayoría de los estudios de biomecánica consideran al
hueso como un material elástico-lineal, lo que se aproxima razonablemente a la realidad, salvo
en el caso de cargas de impacto. Algunos lo consideran con propiedades mecánicas isotrópicas
con el objetivo de simplificar los resultados [6,7], pero esto puede tener como consecuencia
resultados alejados de la realidad, por lo que el húmero debe tomarse con propiedades
mecánicas ortotrópicas y anisótropas para su estudio, para obtener resultados más exactos.
En la Tabla 2.2 se pueden observar los valores de las propiedades mecánicas del
húmero anisótropo después de haber revisado, analizado y calculado una media de las
propiedades mecánicas de este hueso, a partir de los datos expuestos al respecto por un grupo
de autores referenciados en artículos que definen en sus investigaciones el húmero con estas
características [8,9,10,11]. En la tabla 2.3 se establecen las propiedades mecánicas óseas
isotrópicas del húmero que actúan en la articulación glenohumeral. Tabla 2.2 Propiedades Mecánicas Anisotropicas del Hueso (A. Ramos)
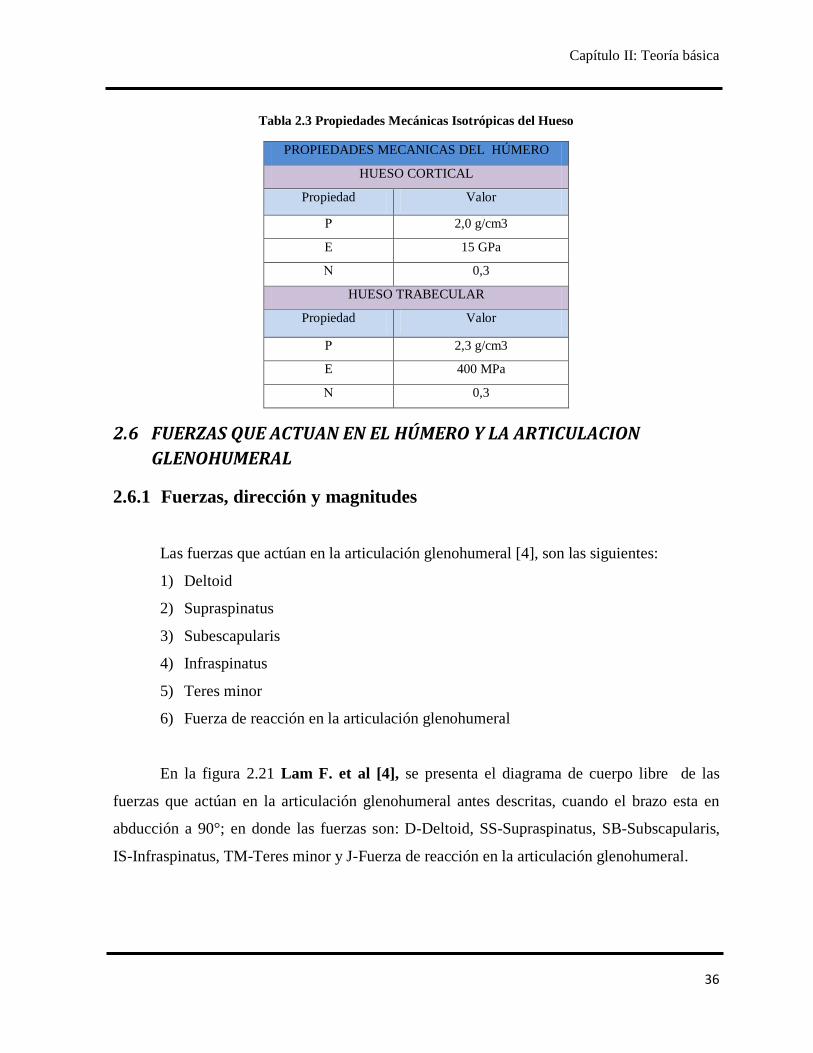
Capítulo II: Teoría básica
36
Tabla 2.3 Propiedades Mecánicas Isotrópicas del Hueso
PROPIEDADES MECANICAS DEL HÚMERO
HUESO CORTICAL
Propiedad Valor
Ρ 2,0 g/cm3
E 15 GPa
Ν 0,3
HUESO TRABECULAR
Propiedad Valor
Ρ 2,3 g/cm3
E 400 MPa
Ν 0,3
2.6 FUERZAS QUE ACTUAN EN EL HÚMERO Y LA ARTICULACION GLENOHUMERAL
2.6.1 Fuerzas, dirección y magnitudes
Las fuerzas que actúan en la articulación glenohumeral [4], son las siguientes:
1) Deltoid
2) Supraspinatus
3) Subescapularis
4) Infraspinatus
5) Teres minor
6) Fuerza de reacción en la articulación glenohumeral
En la figura 2.21 Lam F. et al [4], se presenta el diagrama de cuerpo libre de las
fuerzas que actúan en la articulación glenohumeral antes descritas, cuando el brazo esta en
abducción a 90°; en donde las fuerzas son: D-Deltoid, SS-Supraspinatus, SB-Subscapularis,
IS-Infraspinatus, TM-Teres minor y J-Fuerza de reacción en la articulación glenohumeral.
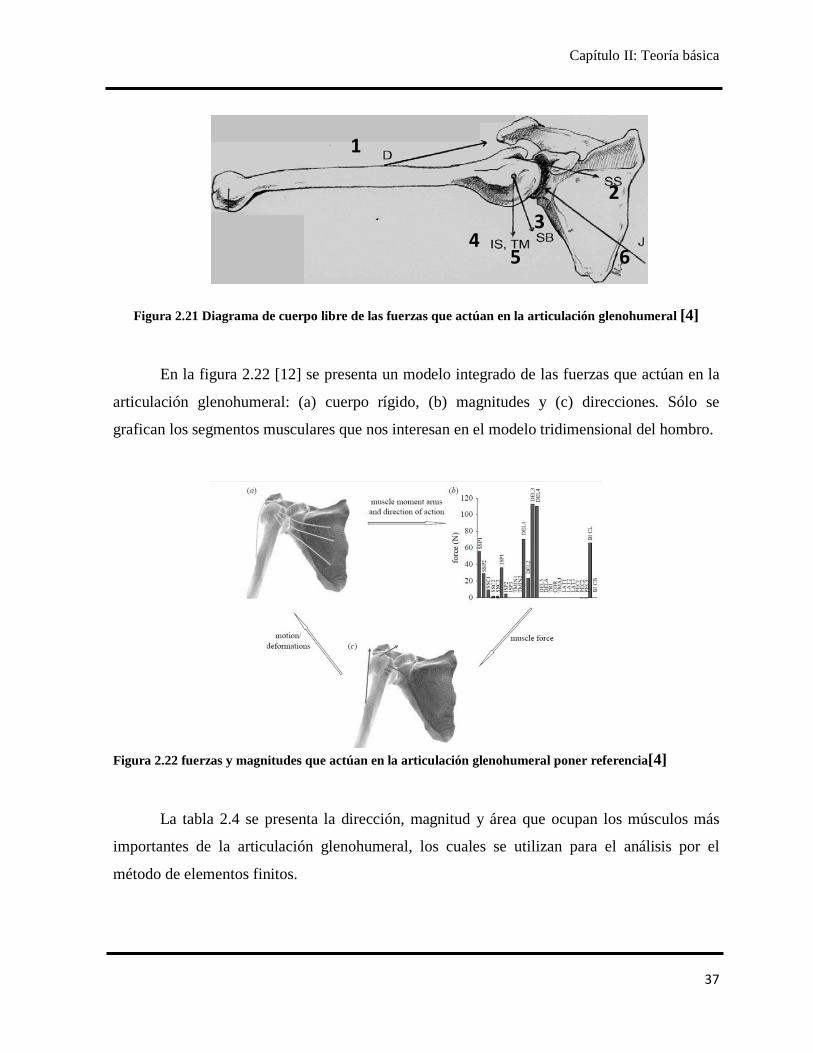
Capítulo II: Teoría básica
37
Figura 2.21 Diagrama de cuerpo libre de las fuerzas que actúan en la articulación glenohumeral [4]
En la figura 2.22 [12] se presenta un modelo integrado de las fuerzas que actúan en la
articulación glenohumeral: (a) cuerpo rígido, (b) magnitudes y (c) direcciones. Sólo se
grafican los segmentos musculares que nos interesan en el modelo tridimensional del hombro.
Figura 2.22 fuerzas y magnitudes que actúan en la articulación glenohumeral poner referencia[4]
La tabla 2.4 se presenta la dirección, magnitud y área que ocupan los músculos más
importantes de la articulación glenohumeral, los cuales se utilizan para el análisis por el
método de elementos finitos.
1
4 5
3 2
6
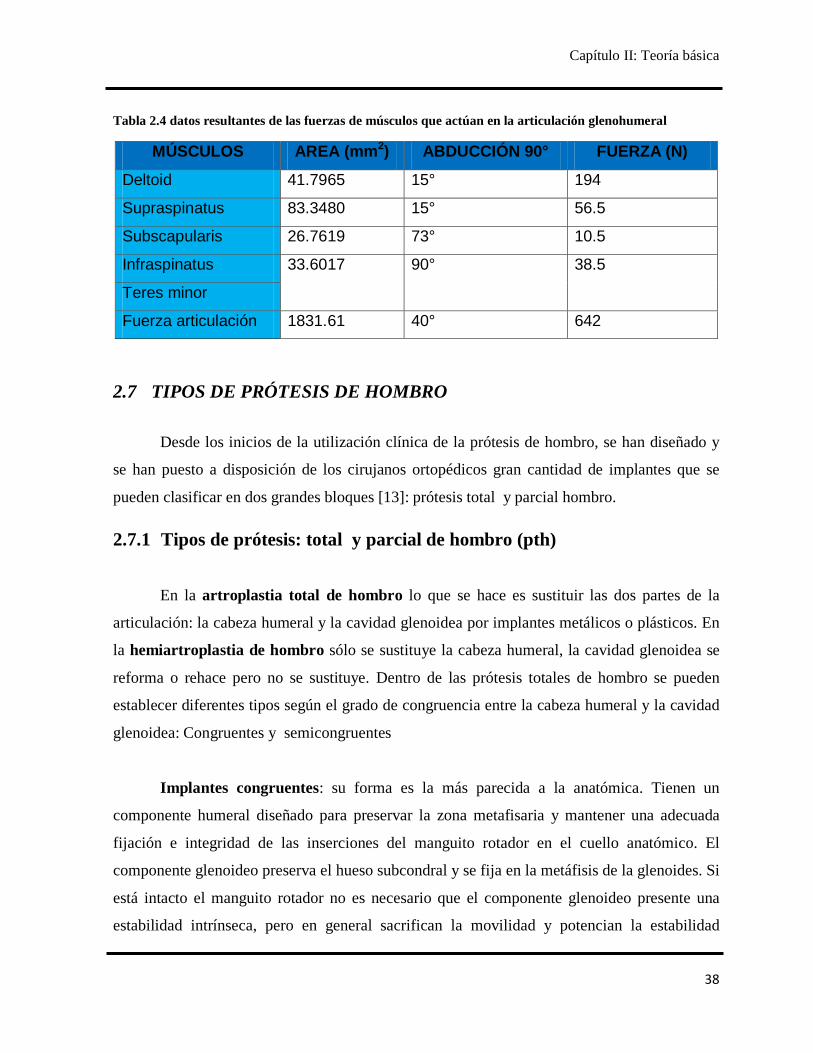
Capítulo II: Teoría básica
38
Tabla 2.4 datos resultantes de las fuerzas de músculos que actúan en la articulación glenohumeral
MÚSCULOS AREA (mm2) ABDUCCIÓN 90° FUERZA (N)
Deltoid 41.7965 15° 194
Supraspinatus 83.3480 15° 56.5
Subscapularis 26.7619 73° 10.5
Infraspinatus 33.6017 90° 38.5
Teres minor
Fuerza articulación 1831.61 40° 642
2.7 TIPOS DE PRÓTESIS DE HOMBRO
Desde los inicios de la utilización clínica de la prótesis de hombro, se han diseñado y
se han puesto a disposición de los cirujanos ortopédicos gran cantidad de implantes que se
pueden clasificar en dos grandes bloques [13]: prótesis total y parcial hombro.
2.7.1 Tipos de prótesis: total y parcial de hombro (pth)
En la artroplastia total de hombro lo que se hace es sustituir las dos partes de la
articulación: la cabeza humeral y la cavidad glenoidea por implantes metálicos o plásticos. En
la hemiartroplastia de hombro sólo se sustituye la cabeza humeral, la cavidad glenoidea se
reforma o rehace pero no se sustituye. Dentro de las prótesis totales de hombro se pueden
establecer diferentes tipos según el grado de congruencia entre la cabeza humeral y la cavidad
glenoidea: Congruentes y semicongruentes
Implantes congruentes: su forma es la más parecida a la anatómica. Tienen un
componente humeral diseñado para preservar la zona metafisaria y mantener una adecuada
fijación e integridad de las inserciones del manguito rotador en el cuello anatómico. El
componente glenoideo preserva el hueso subcondral y se fija en la metáfisis de la glenoides. Si
está intacto el manguito rotador no es necesario que el componente glenoideo presente una
estabilidad intrínseca, pero en general sacrifican la movilidad y potencian la estabilidad
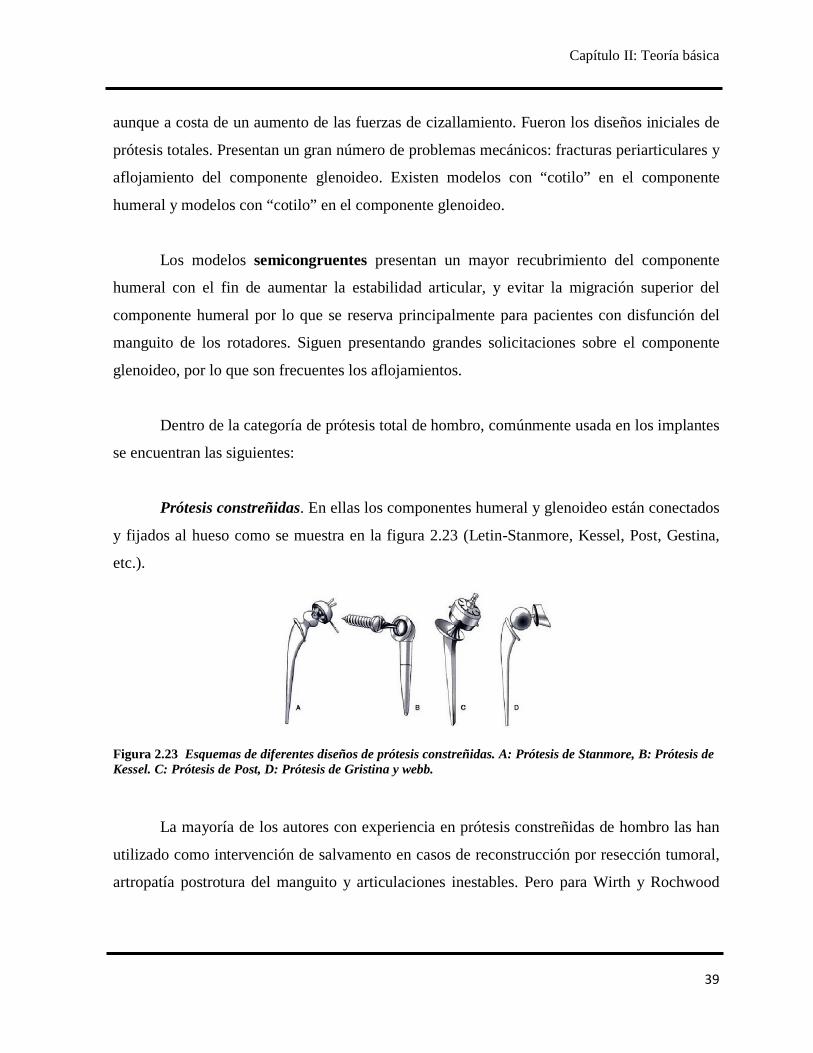
Capítulo II: Teoría básica
39
aunque a costa de un aumento de las fuerzas de cizallamiento. Fueron los diseños iniciales de
prótesis totales. Presentan un gran número de problemas mecánicos: fracturas periarticulares y
aflojamiento del componente glenoideo. Existen modelos con “cotilo” en el componente
humeral y modelos con “cotilo” en el componente glenoideo.
Los modelos semicongruentes presentan un mayor recubrimiento del componente
humeral con el fin de aumentar la estabilidad articular, y evitar la migración superior del
componente humeral por lo que se reserva principalmente para pacientes con disfunción del
manguito de los rotadores. Siguen presentando grandes solicitaciones sobre el componente
glenoideo, por lo que son frecuentes los aflojamientos.
Dentro de la categoría de prótesis total de hombro, comúnmente usada en los implantes
se encuentran las siguientes:
Prótesis constreñidas. En ellas los componentes humeral y glenoideo están conectados
y fijados al hueso como se muestra en la figura 2.23 (Letin-Stanmore, Kessel, Post, Gestina,
etc.).
Figura 2.23 Esquemas de diferentes diseños de prótesis constreñidas. A: Prótesis de Stanmore, B: Prótesis de Kessel. C: Prótesis de Post, D: Prótesis de Gristina y webb.
La mayoría de los autores con experiencia en prótesis constreñidas de hombro las han
utilizado como intervención de salvamento en casos de reconstrucción por resección tumoral,
artropatía postrotura del manguito y articulaciones inestables. Pero para Wirth y Rochwood
Capítulo II: Teoría básica
40
[14], 1996, observaron el elevado número de complicaciones y cuestionan la eficacia de la
prótesis de hombro constreñida, incluso como procedimiento de salvamento.
En ellas el componente glenoideo no está fijado, y ambos componentes humeral y
glenoideo están articulados entre sí. Consiste en un implante autoestable de dos componentes,
que permiten el movimiento a través de dos interfases móviles, y en teoría aporta una serie de
ventajas: contacto total con la cavidad del hombro, incluyendo el arco coracoacromial; actúa
como un espaciador previniendo el contacto troquiter-acromión ; permite un autolineamiento
de la cúpula que no se fija; disminuye las erociones entre el implante y la glenoides por la gran
área de contacto, y disminuye el coeficiente de fricción realizando el movimiento en la
articulación intermedia [14].
Wirth y Rockwood [14] publicaron en 1996, los resultados de una revisión de 13
series de prótesis constreñidas colocadas entre 1972 y 1992, y encontraron un porcentaje de
complicaciones del 8% al 100%, siendo muy común la reintervención con una frecuencia que
va del 4% al 54%, debida a consideraciones biomecánicas y que de forma mayoritaria se
atribuyen a tres factores:
a) Aflojamiento mecánico, principalmente del componente glenoideo
b) Inestabilidad y fracaso del implante por deformación del plástico
c) Fracturas o disociación de los componentes
Según estos autores, la prótesis bipolar podría estar indicada en los casos con
migración vertical del húmero secundaria a las lesiones del manguito en artritis reumatoide de
la larga evolución o en pacientes con artropatía del manguito; así mismo podría ser una
alternativa en cirugía de revisión.
Prótesis no constreñidas o anatómicas. Intentarán la máxima adaptación a la
configuración anatómica normal del hombro como se muestra en la figura 2.24 (Neer,
Gristina, Ucla, Fenlin, etc.).
Capítulo II: Teoría básica
41
Figura 2.24 Prótesis no constreñidas, modelo de Neer I
La prótesis total de hombro no constreñida ha demostrado con el paso del tiempo un
elevado porcentaje de éxitos, con excelentes y buenos resultados para la mayoría de los
pacientes evaluados a corto y medio plazo.
Si seguimos a Neer, en 1982 [15], preciso tener en cuenta 4 factores para minimizar
las complicaciones al realizar una PTH no constreñida:
1) Déficit óseos en cabeza humeral y glenoides.
2) Lesiones en el manguito de los rotadores.
3) Déficit muscular del deltoides.
4) Inestabilidad crónica.
Las prótesis semiconstreñidas con un componente glenoideo sobredimencionado en
su superficie superior, si tienen grandes dimensiones, interfieran en el desplazamiento o la
reparación del manguito de los rotadores y crearán unas cargas excéntricas que aumentarán el
riesgo de aflojamiento del componente glenoideo. Siguiendo a Neer [15], podría estar indicado
en algunos casos la utilización de componentes glenoideos ligeramente sobredimencionados
que podrían ayudar en casos raros con déficit extremo del manguito, artritis reumatoide de
larga evolución o cirugía de revisión en pacientes con buena masa ósea, lo que no suele ser
habitual, por lo que su utilización no será frecuente en la práctica clínica [15].
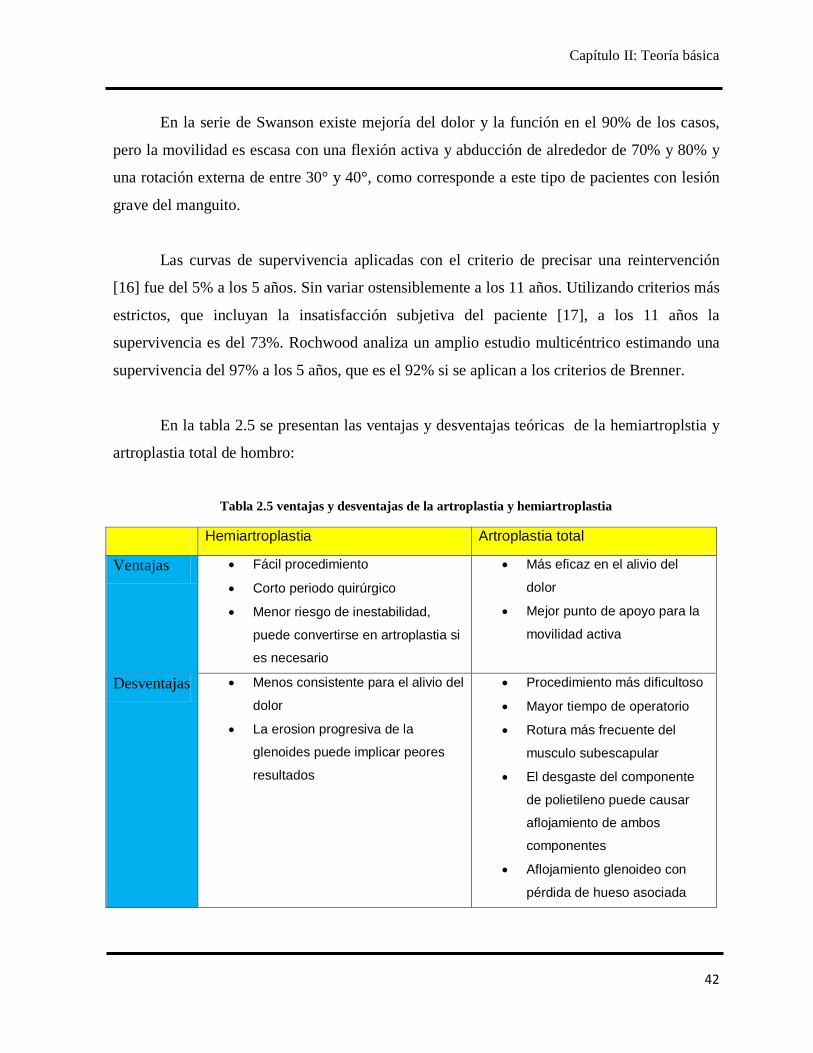
Capítulo II: Teoría básica
42
En la serie de Swanson existe mejoría del dolor y la función en el 90% de los casos,
pero la movilidad es escasa con una flexión activa y abducción de alrededor de 70% y 80% y
una rotación externa de entre 30° y 40°, como corresponde a este tipo de pacientes con lesión
grave del manguito.
Las curvas de supervivencia aplicadas con el criterio de precisar una reintervención
[16] fue del 5% a los 5 años. Sin variar ostensiblemente a los 11 años. Utilizando criterios más
estrictos, que incluyan la insatisfacción subjetiva del paciente [17], a los 11 años la
supervivencia es del 73%. Rochwood analiza un amplio estudio multicéntrico estimando una
supervivencia del 97% a los 5 años, que es el 92% si se aplican a los criterios de Brenner.
En la tabla 2.5 se presentan las ventajas y desventajas teóricas de la hemiartroplstia y
artroplastia total de hombro:
Tabla 2.5 ventajas y desventajas de la artroplastia y hemiartroplastia
Hemiartroplastia Artroplastia total
Ventajas • Fácil procedimiento
• Corto periodo quirúrgico
• Menor riesgo de inestabilidad,
puede convertirse en artroplastia si
es necesario
• Más eficaz en el alivio del
dolor
• Mejor punto de apoyo para la
movilidad activa
Desventajas • Menos consistente para el alivio del
dolor
• La erosion progresiva de la
glenoides puede implicar peores
resultados
• Procedimiento más dificultoso
• Mayor tiempo de operatorio
• Rotura más frecuente del
musculo subescapular
• El desgaste del componente
de polietileno puede causar
aflojamiento de ambos
componentes
• Aflojamiento glenoideo con
pérdida de hueso asociada
Capítulo II: Teoría básica
43
2.8 TOMOGRAFIA AXIAL COMPUTARIZADA PARA EL BIOMODELADO DEL HÚMERO 3D
En la actualidad existe un sinfín de técnicas de modelado, sin embargo, el modelado de
estructuras biológicas es difícil ya que en muchos de los casos estos cuentan con formas
complejas, además de que varían de un espécimen con respecto a otro. Las técnicas de
obtención de imágenes para aplicaciones médicas son variadas, sin embargo, el especialista es
quien decide de acuerdo a sus necesidades el tipo de técnica que elegirá para su análisis.
Algunas de estas técnicas de obtención de imágenes son las siguientes: Rayos-X, Resonancia
Magnética, Ultrasonido, Tomografía Computarizada, y todas las variantes de estas
tecnologías. En este trabajo de tesis se propuso trabajar con las tomografías computarizadas, a
causa de su resolución de las imágenes médicas, ya que se puede hacer distinción entre las
zonas, cortical y trabecular de cada pieza ósea que se esté tratando.
Esta tecnología ha estado disponible desde la década de los 70´s, con mejoras en curso
se centró en la velocidad de adquisición de datos y presentaciones, por primera vez, los
médicos fueron capaces de obtener imágenes tomográficas de alta calidad TC (sección
transversal) de las estructuras internas del cuerpo, lo que originó un aumento en la
competitividad por el mercado mundial de la TC, actualmente con el adelanto en la tecnología
electrónica la TC sigue evolucionando, con nuevas capacidades de ser investigada y
desarrollada.
La tomografía axial computarizada, también conocida por la sigla TAC o por la
denominación escáner, es una técnica de diagnóstico utilizada en medicina. Muchas veces el
escáner o tomografo es parte del cuerpo humano puesto que la TAC se utiliza como
herramienta de diagnóstico médico. La TAC es una exploración de rayos X que produce
imágenes detalladas de cortes axiales del cuerpo. En lugar de obtener una imagen como la
radiografía convencional, la TAC obtiene múltiples imágenes al rotar alrededor del cuerpo.
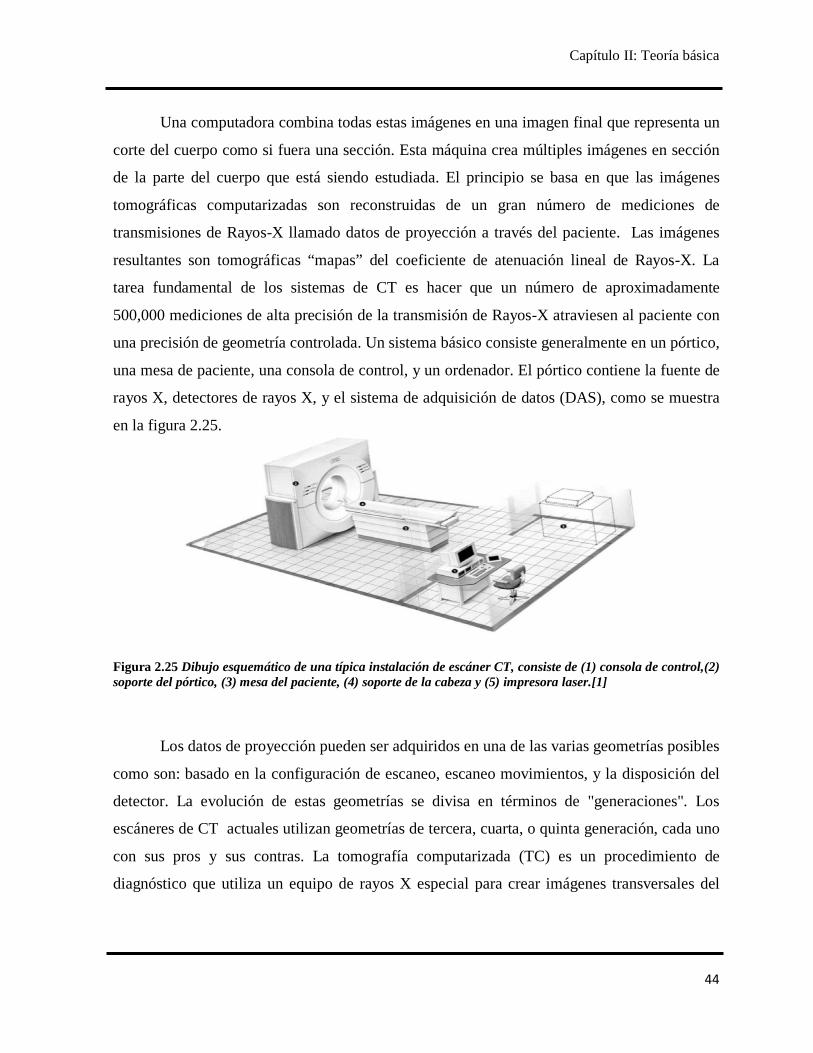
Capítulo II: Teoría básica
44
Una computadora combina todas estas imágenes en una imagen final que representa un
corte del cuerpo como si fuera una sección. Esta máquina crea múltiples imágenes en sección
de la parte del cuerpo que está siendo estudiada. El principio se basa en que las imágenes
tomográficas computarizadas son reconstruidas de un gran número de mediciones de
transmisiones de Rayos-X llamado datos de proyección a través del paciente. Las imágenes
resultantes son tomográficas “mapas” del coeficiente de atenuación lineal de Rayos-X. La
tarea fundamental de los sistemas de CT es hacer que un número de aproximadamente
500,000 mediciones de alta precisión de la transmisión de Rayos-X atraviesen al paciente con
una precisión de geometría controlada. Un sistema básico consiste generalmente en un pórtico,
una mesa de paciente, una consola de control, y un ordenador. El pórtico contiene la fuente de
rayos X, detectores de rayos X, y el sistema de adquisición de datos (DAS), como se muestra
en la figura 2.25.
Figura 2.25 Dibujo esquemático de una típica instalación de escáner CT, consiste de (1) consola de control,(2) soporte del pórtico, (3) mesa del paciente, (4) soporte de la cabeza y (5) impresora laser.[1]
Los datos de proyección pueden ser adquiridos en una de las varias geometrías posibles
como son: basado en la configuración de escaneo, escaneo movimientos, y la disposición del
detector. La evolución de estas geometrías se divisa en términos de "generaciones". Los
escáneres de CT actuales utilizan geometrías de tercera, cuarta, o quinta generación, cada uno
con sus pros y sus contras. La tomografía computarizada (TC) es un procedimiento de
diagnóstico que utiliza un equipo de rayos X especial para crear imágenes transversales del
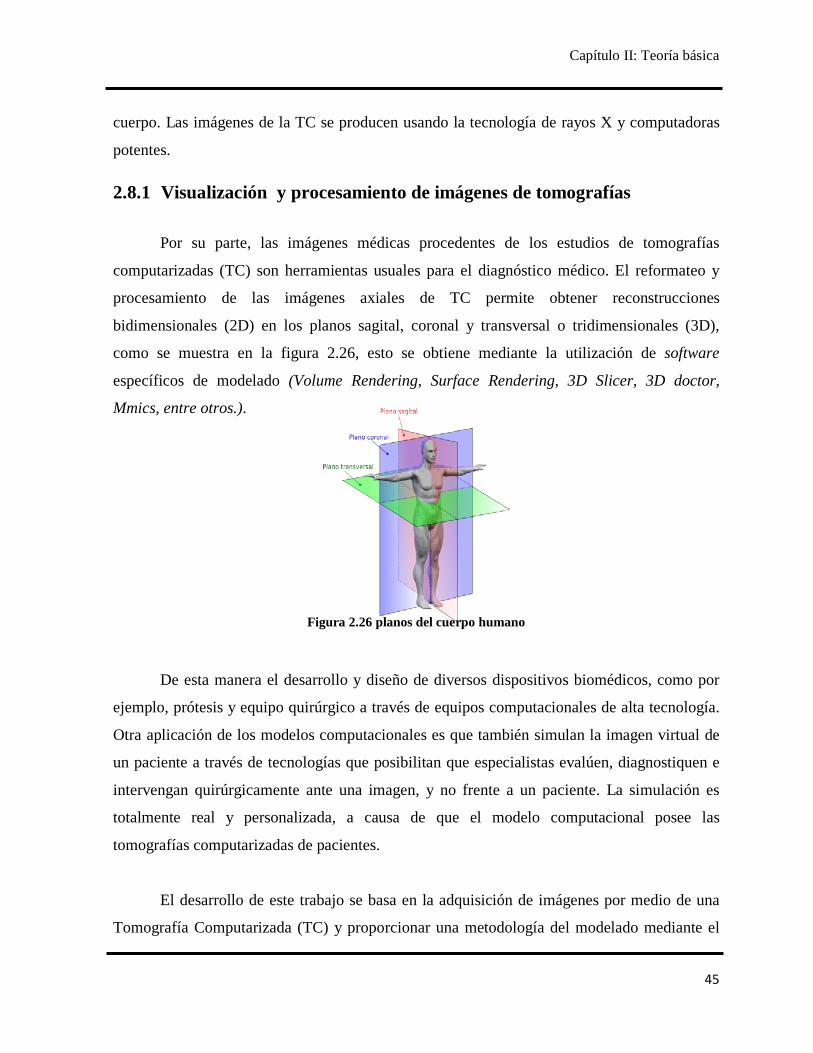
Capítulo II: Teoría básica
45
cuerpo. Las imágenes de la TC se producen usando la tecnología de rayos X y computadoras
potentes.
2.8.1 Visualización y procesamiento de imágenes de tomografías
Por su parte, las imágenes médicas procedentes de los estudios de tomografías
computarizadas (TC) son herramientas usuales para el diagnóstico médico. El reformateo y
procesamiento de las imágenes axiales de TC permite obtener reconstrucciones
bidimensionales (2D) en los planos sagital, coronal y transversal o tridimensionales (3D),
como se muestra en la figura 2.26, esto se obtiene mediante la utilización de software
específicos de modelado (Volume Rendering, Surface Rendering, 3D Slicer, 3D doctor,
Mmics, entre otros.).
Figura 2.26 planos del cuerpo humano
De esta manera el desarrollo y diseño de diversos dispositivos biomédicos, como por
ejemplo, prótesis y equipo quirúrgico a través de equipos computacionales de alta tecnología.
Otra aplicación de los modelos computacionales es que también simulan la imagen virtual de
un paciente a través de tecnologías que posibilitan que especialistas evalúen, diagnostiquen e
intervengan quirúrgicamente ante una imagen, y no frente a un paciente. La simulación es
totalmente real y personalizada, a causa de que el modelo computacional posee las
tomografías computarizadas de pacientes.
El desarrollo de este trabajo se basa en la adquisición de imágenes por medio de una
Tomografía Computarizada (TC) y proporcionar una metodología del modelado mediante el
Capítulo II: Teoría básica
46
uso de tomografías computarizadas, que reproduzca el húmero humano, utilizando un software
interactivo para la visualización, análisis y segmentación de imágenes CT/MRI y la
representación 3D de objetos. Esto con la finalidad de que al analizarlo mediante programas
computacionales basados en el Método de Elementos Finitos (MEF), y obtener resultados
sobre el comportamiento biomecánico del húmero humano. No existen ningún procedimiento
establecido para este tipo de modelado, sin embargo, el objetivo que se persigue en todos los
casos es el mismo: facilitar y reducir su tiempo trabajo, así como adecuarlo conforme a las
necesidades de cada análisis en particular. En las últimas décadas, las herramientas de cálculo
numérico computacional, y en especial el Método de los Elementos Finitos (FEM por sus
siglas en inglés), se han popularizado en el campo de la biomecánica y la ortopedia. Estas
herramientas, originalmente desarrolladas en el campo de la ingeniería, permiten crear los
medios virtuales para el estudio del aparato músculo-esquelético, en particular del húmero y
de esta manera determinar el comportamiento mecánico de sistemas hueso-implante sin
necesidad de intervención y experimentación en el cuerpo humano. Al mismo tiempo, es
posible desarrollar y trabajar con modelos individualizados que consideren las características
particulares de cada paciente y que ayuden en la exploración y búsqueda de soluciones a
problemas específicos antes de la intervención quirúrgica. La construcción de un modelo de
Elementos Finitos necesita definir la geometría del problema (morfología ósea), junto con la
información de sus propiedades mecánicas y cargas (fuerzas) aplicadas.
2.9 BIOMATERIALES
El siglo XXI se ha caracterizado por un desarrollo dinámico de nuevas áreas, las cuales
conjuntan conocimientos de varias ciencias y disciplinas: medicina-ingeniería, psicología-
logística, economía-mercadotecnia, entre otras. Dicho desarrollo es el resultado directo de la
combinación de las necesidades del mundo contemporáneo y la admirable capacidad de
ingenio del ser humano, la cual se ha distinguido por la característica de innovación en
diferentes áreas del conocimiento. Tal ha sido el caso de la bioingeniería, en donde se han
desarrollado una gran cantidad de aplicaciones biomédicas con el objeto de acrecentar la
calidad de vida de muchos pacientes. El desarrollo de la medicina es posible gracias al equipo
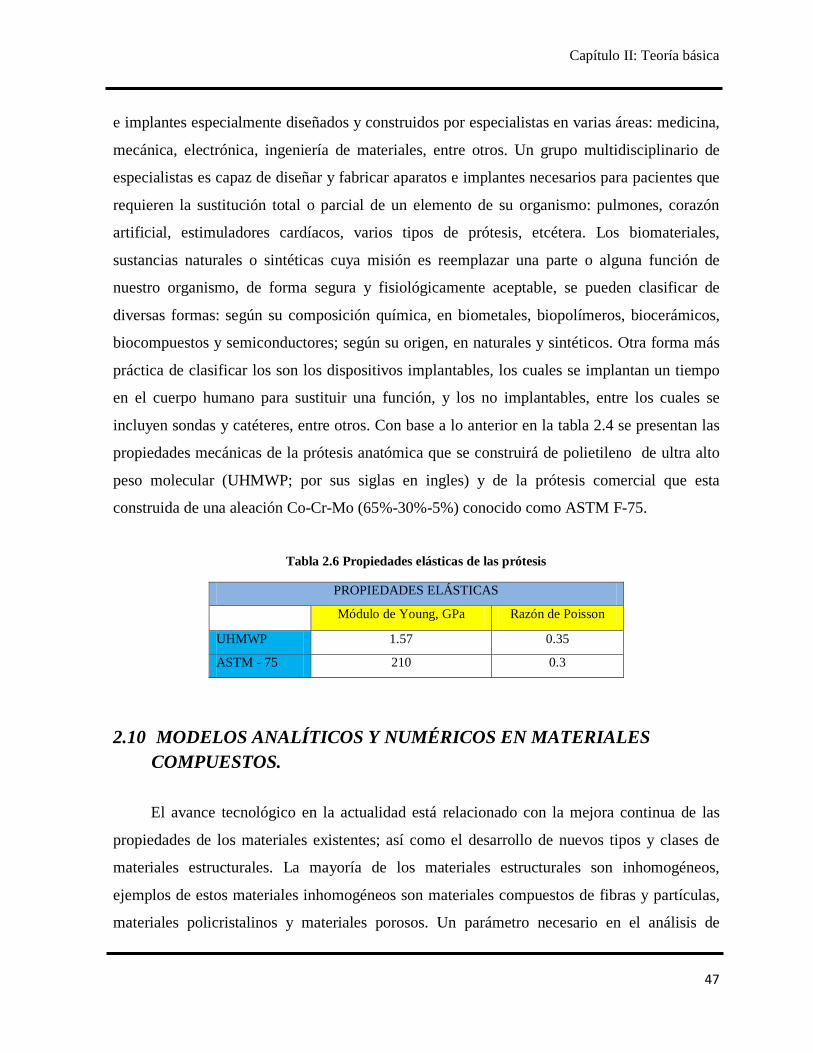
Capítulo II: Teoría básica
47
e implantes especialmente diseñados y construidos por especialistas en varias áreas: medicina,
mecánica, electrónica, ingeniería de materiales, entre otros. Un grupo multidisciplinario de
especialistas es capaz de diseñar y fabricar aparatos e implantes necesarios para pacientes que
requieren la sustitución total o parcial de un elemento de su organismo: pulmones, corazón
artificial, estimuladores cardíacos, varios tipos de prótesis, etcétera. Los biomateriales,
sustancias naturales o sintéticas cuya misión es reemplazar una parte o alguna función de
nuestro organismo, de forma segura y fisiológicamente aceptable, se pueden clasificar de
diversas formas: según su composición química, en biometales, biopolímeros, biocerámicos,
biocompuestos y semiconductores; según su origen, en naturales y sintéticos. Otra forma más
práctica de clasificar los son los dispositivos implantables, los cuales se implantan un tiempo
en el cuerpo humano para sustituir una función, y los no implantables, entre los cuales se
incluyen sondas y catéteres, entre otros. Con base a lo anterior en la tabla 2.4 se presentan las
propiedades mecánicas de la prótesis anatómica que se construirá de polietileno de ultra alto
peso molecular (UHMWP; por sus siglas en ingles) y de la prótesis comercial que esta
construida de una aleación Co-Cr-Mo (65%-30%-5%) conocido como ASTM F-75.
Tabla 2.6 Propiedades elásticas de las prótesis
PROPIEDADES ELÁSTICAS
Módulo de Young, GPa Razón de Poisson
UHMWP 1.57 0.35
ASTM - 75 210 0.3
2.10 MODELOS ANALÍTICOS Y NUMÉRICOS EN MATERIALES COMPUESTOS.
El avance tecnológico en la actualidad está relacionado con la mejora continua de las
propiedades de los materiales existentes; así como el desarrollo de nuevos tipos y clases de
materiales estructurales. La mayoría de los materiales estructurales son inhomogéneos,
ejemplos de estos materiales inhomogéneos son materiales compuestos de fibras y partículas,
materiales policristalinos y materiales porosos. Un parámetro necesario en el análisis de
Capítulo II: Teoría básica
48
materiales compuestos es la caracterización exitosa de su amortiguamiento, esto con el
objetivo de predecir los modos en los cuales se distribuye y disipa carga.
Los materiales compuestos tienen diferentes definiciones que se relacionan al enfoque
con el que se abordan. Así se pueden definir desde el punto de vista de la Química, Mecánica,
Óptica, entre otros. En este capítulo se presentan las técnicas desarrolladas para describir el
comportamiento mecánico de materiales compuestos, vistos éstos como cuerpos elásticos.
Estos modelos se desarrollaron para representar materiales compuestos de dos fases, a causa
de las bases en el planteamiento, pueden generalizarse a compuestos multifase.
2.10.1 Material Compuesto
La palabra compuesto en el término material compuesto significa que dos, los cuales
no son solubles en el otro, se combinan a escala macroscópica para formar un tercer material
[18], esto es, en la inspección macroscópica del material, los componentes pueden
identificarse a simple vista. A escala microscópica, los componentes pueden estar constituidos
de diferentes materiales, aleaciones de metales por ejemplo, pero a nivel macroscópico son
homogéneos [19]. La ventaja principal de los materiales compuestos es la sinergia del trabajo
de los componentes; además, es posible obtener propiedades en el compuesto que ninguno de
los componentes exhibe. Algunas propiedades que pueden mejorarse sensiblemente al formar
un compuesto son: resistencia mecánica, rigidez, resistencia a la corrosión, resistencia al
desgaste, peso, aislamiento térmico y acústico, entre otras.
La información necesaria para cuantificar un compuesto es el contenido de las fases
constituyentes. En el análisis del comportamiento mecánico de compuestos es muy apropiado
cuantificar el contenido de una de las fases por su fracción de volumen relativa al volumen del
compuesto. Un caso particular de los materiales compuestos es aquel en el que dentro de la
matriz existen espacios huecos. De acuerdo a las investigaciones realizadas por Coussy en
2004 [20], este tipo de material se conoce como medio poroso y está compuesto de una matriz
y un espacio poroso, donde este último puede estar ocupado por fluido. El espacio poroso
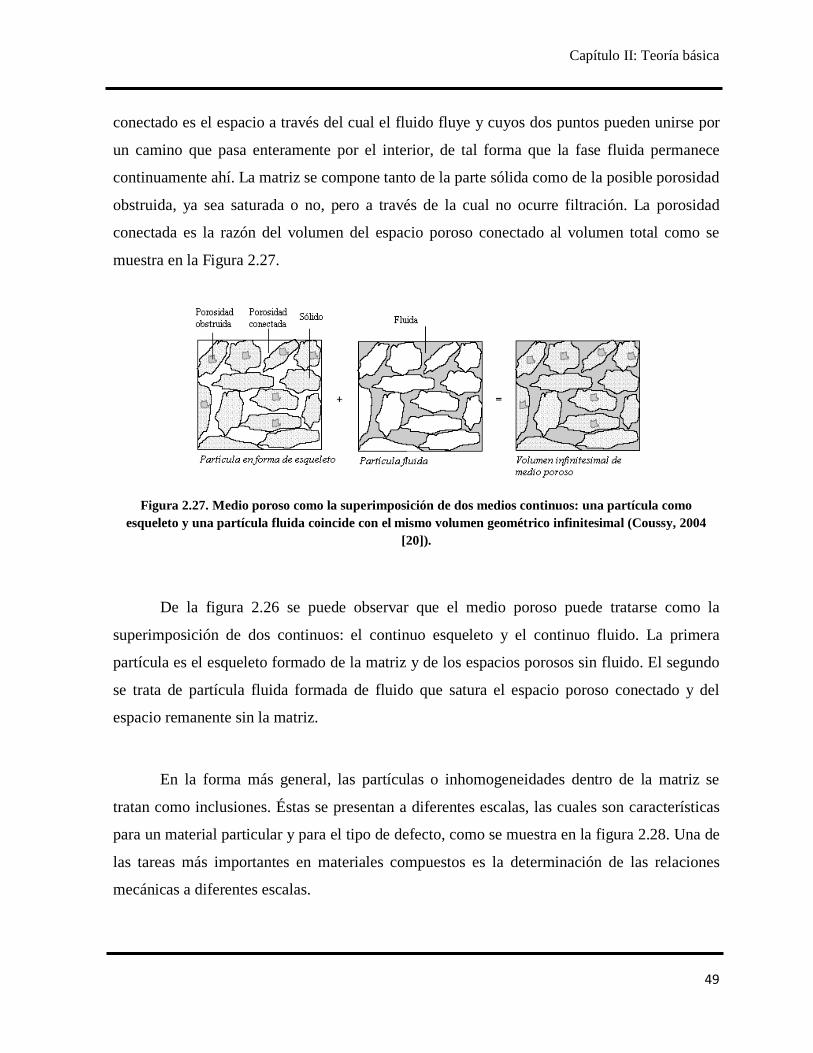
Capítulo II: Teoría básica
49
conectado es el espacio a través del cual el fluido fluye y cuyos dos puntos pueden unirse por
un camino que pasa enteramente por el interior, de tal forma que la fase fluida permanece
continuamente ahí. La matriz se compone tanto de la parte sólida como de la posible porosidad
obstruida, ya sea saturada o no, pero a través de la cual no ocurre filtración. La porosidad
conectada es la razón del volumen del espacio poroso conectado al volumen total como se
muestra en la Figura 2.27.
Figura 2.27. Medio poroso como la superimposición de dos medios continuos: una partícula como esqueleto y una partícula fluida coincide con el mismo volumen geométrico infinitesimal (Coussy, 2004
[20]).
De la figura 2.26 se puede observar que el medio poroso puede tratarse como la
superimposición de dos continuos: el continuo esqueleto y el continuo fluido. La primera
partícula es el esqueleto formado de la matriz y de los espacios porosos sin fluido. El segundo
se trata de partícula fluida formada de fluido que satura el espacio poroso conectado y del
espacio remanente sin la matriz.
En la forma más general, las partículas o inhomogeneidades dentro de la matriz se
tratan como inclusiones. Éstas se presentan a diferentes escalas, las cuales son características
para un material particular y para el tipo de defecto, como se muestra en la figura 2.28. Una de
las tareas más importantes en materiales compuestos es la determinación de las relaciones
mecánicas a diferentes escalas.
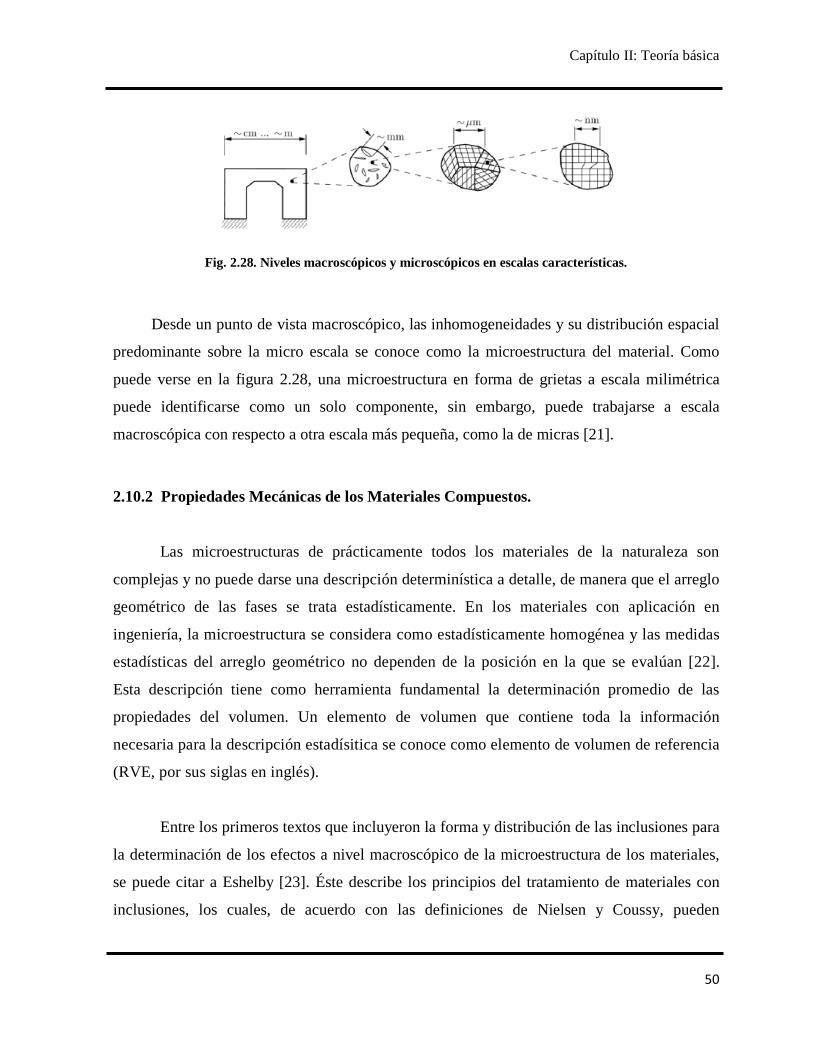
Capítulo II: Teoría básica
50
Fig. 2.28. Niveles macroscópicos y microscópicos en escalas características.
Desde un punto de vista macroscópico, las inhomogeneidades y su distribución espacial
predominante sobre la micro escala se conoce como la microestructura del material. Como
puede verse en la figura 2.28, una microestructura en forma de grietas a escala milimétrica
puede identificarse como un solo componente, sin embargo, puede trabajarse a escala
macroscópica con respecto a otra escala más pequeña, como la de micras [21].
2.10.2 Propiedades Mecánicas de los Materiales Compuestos.
Las microestructuras de prácticamente todos los materiales de la naturaleza son
complejas y no puede darse una descripción determinística a detalle, de manera que el arreglo
geométrico de las fases se trata estadísticamente. En los materiales con aplicación en
ingeniería, la microestructura se considera como estadísticamente homogénea y las medidas
estadísticas del arreglo geométrico no dependen de la posición en la que se evalúan [22].
Esta descripción tiene como herramienta fundamental la determinación promedio de las
propiedades del volumen. Un elemento de volumen que contiene toda la información
necesaria para la descripción estadísitica se conoce como elemento de volumen de referencia
(RVE, por sus siglas en inglés).
Entre los primeros textos que incluyeron la forma y distribución de las inclusiones para
la determinación de los efectos a nivel macroscópico de la microestructura de los materiales,
se puede citar a Eshelby [23]. Éste describe los principios del tratamiento de materiales con
inclusiones, los cuales, de acuerdo con las definiciones de Nielsen y Coussy, pueden
Capítulo II: Teoría básica
51
considerarse como materiales compuestos. Eshelby propone un tratamiento que consiste en la
transformación de una región en un medio elástico, isotrópico, homogéneo e infinito, sometido
a un cambio de forma y tamaño el cual, de no ser por las restricciones impuestas por los
alrededores, sería una deformación homogénea arbitraria [23]. Entonces, el cuestionamiento
fundamental es cuál será el estado elástico de la inclusión y la matriz, si ambas se encuentran
firmemente unidas. La presencia de material circundante en la región generará esfuerzos tanto
al interior como al exterior de la región. El problema se resuelve al aplicar cortes imaginarios
que separan la región de la matriz en cuestión, lo que permite que se efectúe la transformación
de forma y tamaño sin restricciones. La expresión que relaciona la deformación uniforme o
deformación sin restricciones tε , que actúa sobre una inclusión elipsoidal homogénea
embebida en una matriz elástica, lineal e infinita, con el estado de deformación uniforme cε ,
es:
c tSε ε= ………………………………………….(1)
Donde S es el tensor de transformación de Eshelby [24], el cual depende solo de las
propiedades de la matriz y de la forma de las inhomogeneidades; esta última está representada
por la relación de aspecto. La ecuación (1) puede aplicarse al estudio de campos promedios de
esfuerzos y deformaciones en compuestos por medio de la introducción del concepto de
inclusiones homogéneas equivalentes. Esto implica el reemplazo de una inclusión
inhomogénea perfectamente acoplada sujeta a una deformación sin restricciones tε , por una
inclusión homogénea equivalente ficticia sobre la cual actúa una eigendeformación ficticia
equivalente τε . Esta eigendeformación equivalente debe elegirse tal que los mismos campos
de esfuerzo y deformación iσ y iε = cε respectivamente, se obtengan en el estado restringido
para la inclusión inhomogénea y la inclusión homogénea equivalente.
La operación de homogenización consiste en cortar la región que se va a transformar y
retirarla de la matriz (Figura. 2.29a), la cual tiene propiedades elásticas Ei y Em en el
compuesto homogéneo y homogéneo equivalente, respectivamente, para permitir que la
transformación sin restricciones se lleve a cabo. Con esperamos que la región tome un nuevo
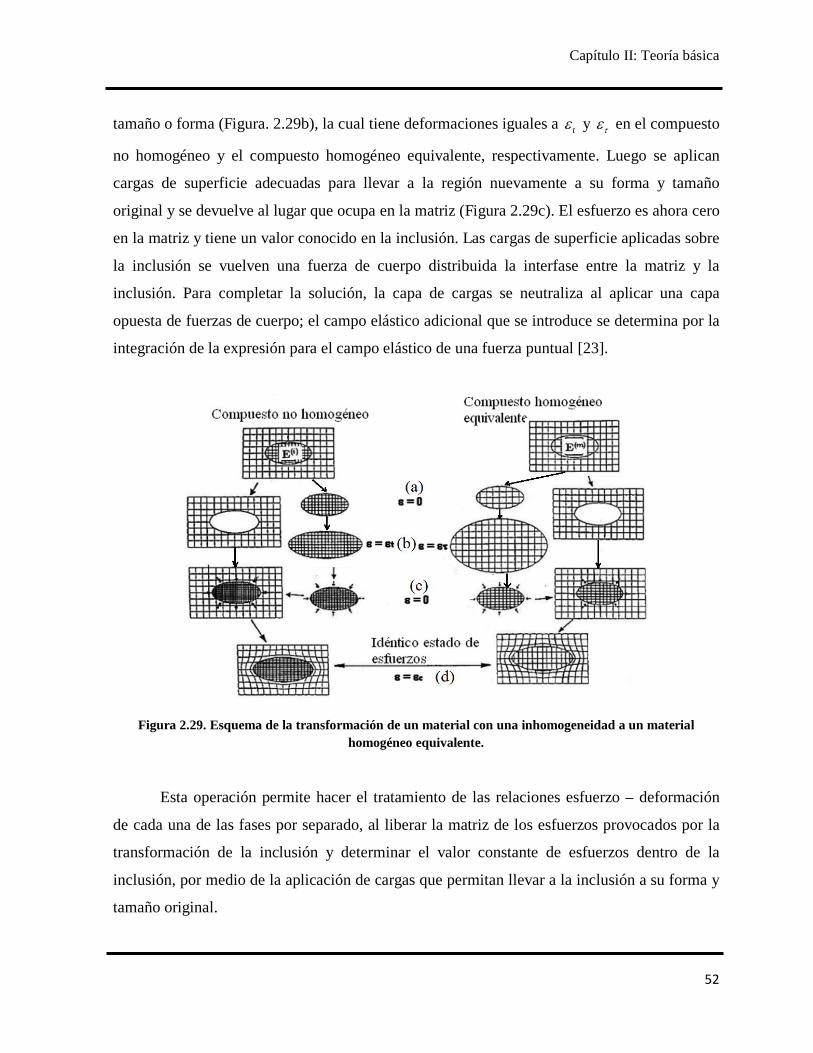
Capítulo II: Teoría básica
52
tamaño o forma (Figura. 2.29b), la cual tiene deformaciones iguales a tε y τε en el compuesto
no homogéneo y el compuesto homogéneo equivalente, respectivamente. Luego se aplican
cargas de superficie adecuadas para llevar a la región nuevamente a su forma y tamaño
original y se devuelve al lugar que ocupa en la matriz (Figura 2.29c). El esfuerzo es ahora cero
en la matriz y tiene un valor conocido en la inclusión. Las cargas de superficie aplicadas sobre
la inclusión se vuelven una fuerza de cuerpo distribuida la interfase entre la matriz y la
inclusión. Para completar la solución, la capa de cargas se neutraliza al aplicar una capa
opuesta de fuerzas de cuerpo; el campo elástico adicional que se introduce se determina por la
integración de la expresión para el campo elástico de una fuerza puntual [23].
Figura 2.29. Esquema de la transformación de un material con una inhomogeneidad a un material homogéneo equivalente.
Esta operación permite hacer el tratamiento de las relaciones esfuerzo – deformación
de cada una de las fases por separado, al liberar la matriz de los esfuerzos provocados por la
transformación de la inclusión y determinar el valor constante de esfuerzos dentro de la
inclusión, por medio de la aplicación de cargas que permitan llevar a la inclusión a su forma y
tamaño original.
Capítulo II: Teoría básica
53
Finalmente, en su trabajo, Eshelby dedujo lo que los autores subsecuentes llamaron el
tensor de Eshelby, ampliamente usado en la determinación de las propiedades mecánicas de
materiales con inclusiones. En el tratamiento del campo elástico de inclusiones elásticas se
hace una insipiente mención acerca de la disipación de energía en un material compuesto [25],
así como de la relación que existe entre la orientación de las inclusiones y la tasa de disipación
energética.
Con base en los trabajos de Eshelby, Mori publicó el esquema de energía elástica
promedio de materiales con inclusiones, conocido como Esquema de Mori – Tanaka (MTS,
por sus siglas en inglés) [26], el cual se orienta al estudio de materiales compuestos obtenidos
de la industria minera. El modelo propuesto por Mori estuvo inicialmente dirigido a la
determinación de esfuerzos en el proceso de endurecimiento de materiales. El método consiste
en la determinación de esfuerzos internos promedio en la matriz de un material con
inclusiones, con deformaciones de transformación. Una consideración básica en el trabajo de
Mori es que trata con materiales que tienen constantes elásticas uniformes a través de todo el
espécimen, además supone que el espécimen tiene N inclusiones que están, a escala
macroscópica, uniformemente distribuidas en la matriz. Cuando una inclusión V adquiere una
deformación uniforme de transformación Tijε , una deformación total '
ijε se introduce dentro del
espécimen. Así, 'ijε se compone de dos partes:
ijε∞ - representa la deformación restringida (deformación total) cuando la inclusión se
encuentra en un cuerpo infinito. Tal como lo propone Eshelby, Mori [26] se apoya en la
función de Green para calcular la circulación de deformaciones por la frontera de la inclusión:
( ) ( ){ }' ', ,, , / 2 ( ')T
ij mn mnkl kl lj kl ljV
C G x x G x x dD xε ε∞ = − − ∫ …………(2),
donde klG es la función de Green para un cuerpo infinito y homogéneo y ijklC , sus constantes
elásticas.
Capítulo II: Teoría básica
54
imijε - Representa la deformación introducida en el espécimen actual a causa de la presencia de
frontera libre del espécimen.
Se puede demostrar que cuando todas las inclusiones adquieren deformaciones de
transformación idénticas Tijε , el espécimen, como un todo, se somete a un cambio de forma y
la deformación promedio que describe el cambio de forma es: F Tij Vo ijfε ε⟨ ⟩ = ………………………………….(3)
donde f es la fracción de volumen de las inclusiones [26].
Adicionalmente, Mori aborda, de manera breve, el tema de la interacción entre inclusiones
desde un punto de vista energético. Análogamente al tratamiento de las deformaciones, se
puede establecer una relación similar para los esfuerzos de la siguiente manera: F Tij Vo ijfσ σ⟨ ⟩ = ………………………………..(4)
Así como las deformaciones, los esfuerzos dentro de una inclusión son, en promedio: I Tij ijfσ σ∞ − …………………………………..(5)
Entonces, la energía elástica por unidad de volumen del espécimen:
(1 )2
I Tij ijo
el
f fE
σ ε∞− −= ……………………….(6)
Esta expresión sí toma en cuenta la interacción entre las inclusiones próximas, con el
efecto de la presencia de la frontera libre del espécimen, aunque no es aplicable para
materiales con altos índices de porosidad [26]. Además del modelo presentado por Mori, otros
autores abordaron el problema de la determinación de las propiedades elásticas de un material
con inclusiones. Uno de los primeros en considerar la porosidad dentro del esquema fue
Dewey [27], quien analizó el efecto de las inclusiones como si cada inclusión estuviera fuera
del alcance de los efectos de la inclusión vecina.
El objetivo principal del primer trabajo sobre el efecto de inclusiones elípticas de
Kachanov [28] es la determinación de la anisotropía de las propiedades elásticas efectivas de
Capítulo II: Teoría básica
55
sólidos con grietas, los cuales son un caso particular de material compuesto. En este trabajo se
introduce el concepto de tensor de densidad de grietas α, que describe una geometría
promedio de arreglos de grietas. Como puede deducirse, la investigación de Kachanov se
orienta a la Mecánica del Daño, y el modelo particular propuesto en este trabajo, hace posible
la determinación de la anisotropía de la respuesta elástica, pero tiene la limitante que es
necesario conocer la distribución de grietas. En su siguiente trabajo [29], establece modelos
matemáticos para determinar las propiedades efectivas de cuerpos con arreglos de grietas
particulares tales como rectangulares, microgrietas alrededor de una grieta principal, entre
otros. En 1993, Kachanov [30] aborda dos principales temas:
• El impacto de las interacciones sobre las grietas individuales, particularmente sobre los
factores de intensidad de esfuerzos (SIFs, por sus siglas en inglés). Las interacciones
pueden producir una variedad de fenómenos como blindaje y amplificación esfuerzos,
acoplamiento de los modos normal y cortante, etc. La configuración de una
macrogrieta que interactúa con un campo de microgrietas es de particular interés para
aplicaciones en ciencias de los materiales.
• Las propiedades elásticas efectivas de sólidos con muchas grietas. Este es un problema
clásico de mecánica del continuo, que también tiene aplicación en ciencias de los
materiales, mecánica estructural, geofísica y sirve como un antecedente de algunas
técnicas de evaluación no destructiva. La degradación de la rigidez, desarrollo de
anisotropía y cambios en la velocidad de propagación de ondas, causadas por el
microagrietamiento son de importancia obvia para estos campos. Este problema y la
mayoría de los enfoques para esto (aproximación de grietas no interactuantes, varios
esquemas auto-concordantes, etc.) tienen raíces en las teorías de medios efectivos de
física. Al mismo tiempo, las grietas constituyen un tipo de defecto distintivamente
especial: éstas no ocupan volumen, en contraste con las inhomogeneidades tipo
inclusión; el campo de esfuerzos generado por una sola grieta es completamente
complejo, particularmente en 3D (en contraste con los campos de partículas que son,
generalmente esféricamente simétricas). Como resultado, la teoría de propiedades
efectivas de sólidos con grietas tiene muchas características especiales: la elección de
un parámetro adecuado de densidad de grietas se convierte en algo no trivial; la
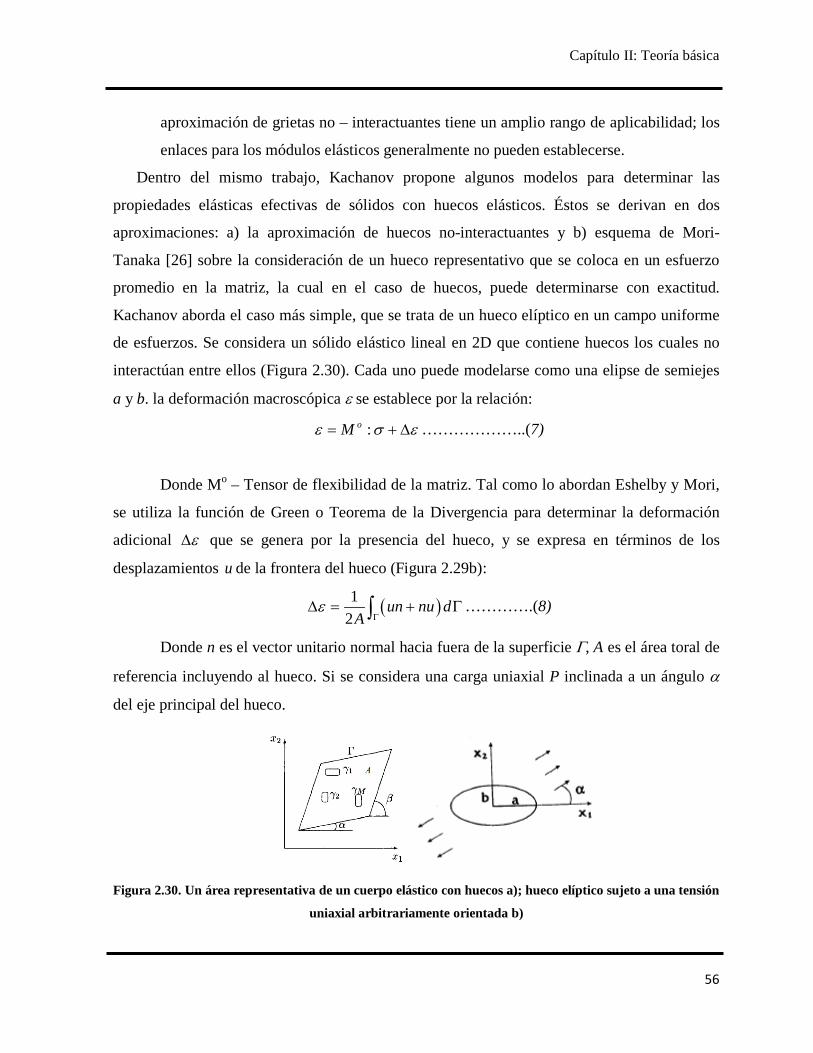
Capítulo II: Teoría básica
56
aproximación de grietas no – interactuantes tiene un amplio rango de aplicabilidad; los
enlaces para los módulos elásticos generalmente no pueden establecerse.
Dentro del mismo trabajo, Kachanov propone algunos modelos para determinar las
propiedades elásticas efectivas de sólidos con huecos elásticos. Éstos se derivan en dos
aproximaciones: a) la aproximación de huecos no-interactuantes y b) esquema de Mori-
Tanaka [26] sobre la consideración de un hueco representativo que se coloca en un esfuerzo
promedio en la matriz, la cual en el caso de huecos, puede determinarse con exactitud.
Kachanov aborda el caso más simple, que se trata de un hueco elíptico en un campo uniforme
de esfuerzos. Se considera un sólido elástico lineal en 2D que contiene huecos los cuales no
interactúan entre ellos (Figura 2.30). Cada uno puede modelarse como una elipse de semiejes
a y b. la deformación macroscópica ε se establece por la relación:
:oMε σ ε= + ∆ ………………..(7)
Donde Mo – Tensor de flexibilidad de la matriz. Tal como lo abordan Eshelby y Mori,
se utiliza la función de Green o Teorema de la Divergencia para determinar la deformación
adicional ε∆ que se genera por la presencia del hueco, y se expresa en términos de los
desplazamientos u de la frontera del hueco (Figura 2.29b):
( )12
un nu dA
εΓ
∆ = + Γ∫ ………….(8)
Donde n es el vector unitario normal hacia fuera de la superficie Γ, A es el área toral de
referencia incluyendo al hueco. Si se considera una carga uniaxial P inclinada a un ángulo α
del eje principal del hueco.
Figura 2.30. Un área representativa de un cuerpo elástico con huecos a); hueco elíptico sujeto a una tensión
uniaxial arbitrariamente orientada b)

Capítulo II: Teoría básica
57
La integral 8 puede calcularse de los resultados de Eshelby [23] para una cavidad
elipsoidal en el caso límite de un elipsoide cilíndrico, tal que:
( )111 cos 2
o
P b b a bE A
ε π α∆ = + + ………………(9)
( )221 cos 2
o
P a a a bE A
ε π α∆ = − + ………………..(10)
( )212
1 22o
P a b senE A
πε α ∆ = + ………………….(11)
En el cálculo de las deformaciones adicionales ε∆ se suponen condiciones de
deformación plana. Eo representa a las constantes de Lamé. Además de las expresiones
anteriores, se pueden hacer algunas observaciones mas acerca de las deformaciones causadas
por la presencia de un hueco. La deformación volumétrica 11 22ε ε+ producida por una carga
hidrostática 11 22σ σ+ = P, es:
( )211 22
1 2o
P a bE A
ε ε π∆ + ∆ = + ………………..(12)
2.10.3 El campo elástico en una inclusión elipsoidal
De las ecuaciones de elasticidad se sabe que las ecuaciones de equilibrio son:
12
jiij
j i
uux x
ε ∂∂
= + ∂ ∂ …………………(13)
2ij mm ij ijσ λε δ µε= + ………………..(14)
Capítulo II: Teoría básica
58
Donde u es el desplazamiento elástico; ε , la deformación y σ , el esfuerzo. Las constantes
de Lamé se definen por las relaciones( )( )1 1 2
Eνλν ν
=+ −
y 2(1 )
Eµν
=+
, donde E y ν son el
módulo de Young y la relación de Poisson para un medio isotrópico, respectivamente y δ es la
función Delta de Kronecker.
La determinación del campo elástico de una inclusión consiste en hacer
consideraciones especiales para el análisis. Una de ellas es el corte imaginario de la inclusión
y su remoción de la matriz, con la cual se retiran las restricciones a la inclusión y ésta puede
tomar su forma relajada. Entonces se determinan las cargas de superficie necesarias para
restaurar la forma original de la inclusión, y se coloca nuevamente en la matriz. El esfuerzo en
la matriz ahora es nulo y tiene un valor conocido en la inclusión.
El esfuerzo uniforme de transformación Tijε al cual la inclusión se sometería en la
ausencia de la matriz se conoce como deformación libre de esfuerzos [31]. El problema
principal es encontrar la deformación restringida Cijε en la inclusión cuando la transformación
toma lugar dentro de la matriz así como el estado de deformación de la propia matriz. Si S es
la superficie que separa la matriz y la inclusión y in su vector normal unitario cuya dirección
es hacia fuera de la inclusión, se podría tomar un elemento diferencial de superficie
i idS n dS= y a continuación hacer las siguientes operaciones [23]:
a) La inclusión se retira de la matriz y se permite que alcance la condición de
deformación libre de esfuerzos Tijε sin alterar sus constantes elásticas, entonces el
esfuerzo relacionado a esta deformación se puede expresar como:
2T T Tij ij ijσ λε δ µε= + ……………………………………(15)
En esta etapa, el esfuerzo de la inclusión y de la matriz es nulo.
Capítulo II: Teoría básica
59
b) Se aplican las tracciones de superficie, Tij jnσ− a la inclusión. Esta operación le
devuelve el tamaño y forma que tenía antes de la transformación; Se regresa la
inclusión dentro de la matriz con mismas condiciones de interacción originales. Ahora
las fuerzas de superficie se transforman en una capa de fuerzas de cuerpo distribuidas
en S.
c) Se aplica otra tracción de superficie Tij jnσ+ sobre S. Ahora el cuerpo está libre de
fuerzas externas pero en un estado de esforzado a causa de la transformación de la
inclusión.
De la cinemática de cuerpos elásticos, se puede establecer que el desplazamiento u de
un punto material, localizado por un vector r-r’, a causa de una fuerza puntual Fi es:
( ) ( )21 1' '
4 ' 16 1j
j ii j
Fu r r F r r
r r x xπµ πµ ν∂
− = − −− − ∂ ∂
…………………..(16)
Con base en la ecuación (16) y retomando la consideración c), los desplazamientos
sobre el material se pueden expresar de la siguiente forma:
( ) ( )'C Ti jk k j k
S
u r n u r r dSσ= −∫ ……………………………….(17)
Al sustituir el valor de ( )'ju r r− expresado en (16), en (17):
31 116 (1 ) 4
C T Ti jk ik
i j k k
ux x x x
ψ ϕσ σπµ ν πµ
∂ ∂= −
− ∂ ∂ ∂ ∂ ………………………(18)
Donde 'V
dvr r
ϕ =−∫ y '
Vr r dvψ = −∫ , en las cuales las integrales se toman sobre el
volumen V envuelto por la superficie S.
Para el caso particular de una inclusión limitada por un elipsoide con ecuación 22 2
2 2 2 1yx za b c+ + = , el potencial armónico es:

Capítulo II: Teoría básica
60
( ) ( ) ( )22 2
2 2 2
2 2 2
1 yx za u b u c u
abc dua u b u c uλ
ϕ π∞
− − − + + + =
+ + +∫ ………………………….(19)
donde λ es la raíz cuando ( ) ( ) ( )22 2
2 2 21 yx za u b u c u
− − −+ + +
= 0
Al retomar la etapa b), donde el esfuerzo y la deformación en la matriz son nulos y la
inclusión, aunque no se encuentra libre de esfuerzos, tiene la forma geométrica que tenía antes
de la transformación. Entonces, Ciu es el desplazamiento en la matriz y la inclusión. La
deformación en la matriz o la inclusión es:
12
CCji
ijj i
uux x
ε ∂∂
= + ∂ ∂ ……………………………………(20)
El esfuerzo en la matriz generado por la deformación de la ecuación (18) se deriva de
la ley de Hooke:
2C C Cij ij ijσ λε δ µε= + ……………………………………(21)
Por otra parte, la inclusión tenía un esfuerzo Tij jnσ− antes de la etapa c), así que los
esfuerzos al interior de ésta son: I C Tij ij ijσ σ σ= − , que al sustituir las expresiones (15) y (17):
( ) ( )2I C T C Tij ij ij ijσ λ ε ε δ µ ε ε= − + − …………………………. (22)
Finalmente, es posible establecer la relación entre las deformaciones restringidas y
libres de esfuerzos en la inclusión en la forma [23]: C Til ilmn mnSε ε= ………………………………….(23)
Donde Silmn se conoce como el Tensor de Transformación de Eshelby, el cual contiene
las propiedades elásticas de la inclusión y los efectos de esta en la frontera con la matriz. La
relación (21) se aplica para todas aquellas inclusiones que puedan modelarse por elipsoides o
elipses que se encuentren en un medio elástico lineal infinito. El complemento para extender
principio de equivalencia de Eshelby a matrices con más de una inclusión con concentraciones
infinitas es el concepto de Mori – Tanaka [Mori, 1973], el cual consiste en calcular el esfuerzo
promedio en la matriz con lo que se incluye la interacción entre inclusiones. Este enfoque

Capítulo II: Teoría básica
61
demostró ser confiable para la estimación del módulo de Young para varios materiales
compuestos, así como para las relaciones esfuerzo deformación de compuestos poliméricos
bajo deformación plástica [32].
Entonces, retomando la expresión (23), la deformación promedio del compuesto, con
una inclusión que tiene deformaciones Cilε , es:
1Tcε ε ε= + …………………………………..(24)
Donde ε representa la deformación de la matriz sin inclusiones y 1c representa la
fracción de volumen ocupado por la inclusión [33].
Para el caso particular en el que las inclusiones son huecos dentro de la matriz
homogénea, las ecuaciones para la determinación de las propiedades elásticas desprecian las
propiedades elásticas del aire contenido en éstas, siempre y cuando no se encuentre
presurizado. Dado que, para los intereses del presente trabajo, las inclusiones se propusieron
como huecos de forma elipsoidal, en la solución de Eshelby se ignoran las propiedades
elásticas del aire. Para este caso particular, el tensor de deformación de la matriz del
compuesto se relaciona con el de esfuerzo a través de la expresión:
0 0
0 ( )Eσ σ σ ε ε= + = + ………………………….(25)
En donde: 0σ - Tensor de esfuerzos en la matriz de material con tensor de propiedades elásticas 0E , que
considera la presencia de inhomogeneidades en forma de cavidades elipsoidales.
σ - Tensor de esfuerzo en el material elástico, homogéneo e isotrópico.
σ - Tensor de esfuerzo que representa los efectos de la presencia de cavidades. 0ε - Tensor de deformación para un material elástico, homogéneo e isotrópico.
ε - Tensor de defomación que representa los efectos de la presencia de cavidades.
Capítulo II: Teoría básica
62
Zhao presenta una aproximación basada en el procedimiento de Tandon y Weng en la
cual se evalúa la relación entre las perturbaciones causadas por la presencia de la cavidad
(inclusión, en el caso mas general) y el esfuerzo promedio en la matriz. La evaluación se
desarrollar en el sistema de coordenadas local de la inclusión, alineado al eje mayor de la
inclusión y luego se estima su efecto en el sistema global de coordenadas de la pieza. Con base
en este procedimiento, Tandon y Weng determinaron dos propiedades del compuesto:
Módulo de compresibilidad: 01
11
K Kc p
=+
…………….………………………(26)
y
Módulo de cortante: 01
11
G Gc q
=+
….…….…………………………(27)
Donde:
2
0
ppc
=
2
0
qqc
=
( )( )( )
2222 2233 1111 1122 22112
1122 2211 1111 2222 2233
( 1) 2 113 2 1 1
S S S S Sp
S S S S S+ − + − − −
=− − + −
;
( ) ( ) ( )( ) ( )
( )( )2222 2323 1122 2211 1111
21212 2323 2233 2222 1122 2211 1111 2222 2233
2 1 12 1 1 15 2 1 3 2 1 15 1 15 2 1 1
S S S S Sq
S S S S S S S S S+ − + + −
= − − + +− − − + − − + −
y ijklS son los elementos del tensor de transformación de Eshelby, los cuales pueden
consultarse en el apéndice A, para arreglos de cavidades esferoidales. Además de los módulos
de compresibilidad y cortante, también es posible determinar todas las componentes del tensor
de elasticidad, los cuales, además de la relación de Poisson ν, dependen de la relación de
aspecto de la cavidad. Los componentes del tensor de transformación de Eshelby contienen
también un factor de orientación de las inclusiones.
Capítulo II: Teoría básica
63
2.11 PROCESO DE TRIBOADHESIÓN
2.11.1 Antecedentes de la triboadhesión
De acuerdo a las investigaciones realizadas en los recubrimientos de superficies,
proponen que la mayoría de problemas de desgaste producido por la fricción, pueden ser
resueltos satisfactoriamente con el empleo de la técnica de triboadhesión. Como alternativa
para mejorar el comportamiento de materiales de piezas mecánicas y prótesis, se propone
recubrir con la técnica de triboadhesión utilizando para ello un material que mejore las
propiedades del material base.
El diamante natural, tiene propiedades tales como, dureza, modulo elástico,
incomprensibilidad, conductividad térmica y excelentes puntuaciones en muchas otras
propiedades como son el coeficiente de dilatación, fricción, transparencia, inercia química y
aislante eléctrico. La alternativa más inmediata al Diamante natural es el llamado Carbono tipo
Diamante l y es el material de aporte que se prevé utilizar para este trabajo, también conocido
como DLC. El Diamond Like Carbon o DLC; se trata de carbono amorfo, esto confiere a este
material unas propiedades intermedias entre las del grafito y del diamante. Desde el punto de
vista eléctrico es aislante y del punto de vista mecanico las propiedades del DLC son cercanas
a las del diamante natural, por lo que el DLC es un sustituto del diamante [34].
La utilización de recubrimientos permite modificar las propiedades en la superficie de
materiales comunes de ingeniería, tal como, cobre, aluminio, aceros, etc. Para el caso de
interfaces sólido-sólido, el desgaste depende de la magnitud de la carga aplicada y del
coeficiente de fricción de los materiales en contacto. La selección del tipo de recubrimiento es
función de las propiedades superficiales que desean obtener. Estas pueden ser resistencia al
desgaste, dureza, resistencia al ataque químico y dependen del material de aporte que se utiliza
para el recubrimiento y del tipo de técnica que se utiliza para recubrir.
Capítulo II: Teoría básica
64
2.11.2 Descripción del procedimiento de deposición
El proceso de triboadhesión emplea el mecanismo de fricción para la deposición de
material sobre una superficie. Este mecanismo es función de complejas interacciones entre los
cuerpos que están en contacto, los cuales incluyen los efectos de deformación plástica de las
asperezas, adhesión de los puntos de contacto y transferencia de material [35]. La complejidad
del proceso de recubrimiento por triboadhesión se aprecia mejor si se reconoce que además de
estos procesos, participan variables de los materiales base y de aporte como son: dureza,
modulo de elasticidad, resistencia de fluencia, estructura y composición de la superficie a
recubrir, presión de contacto, temperatura, esfuerzos inducidos sobre la superficie, velocidad
de deslizamiento, acabado superficial, contaminantes y atmosfera ambiente [36].
A causa de las interacciones que sufre la superficie, se genera energía, esta se disipa en
forma de calor y se pierde en dos diferentes regiones dentro de la zona de contacto. La primera
región es la interfacial caracterizada por elevadas razones de disipación de energía. La
segunda región involucra la masa del cuerpo y los volúmenes de material que están sujetos a
deformaciones [37].
Los procesos que suceden en la primera región durante la fricción son:
1) Deformaciones plásticas.
2) Deformaciones visco-elásticas que conducen a fatiga y flujo de la superficie y
subsecuentemente a calentamiento excesivo sobre el material subyacente y daño.
3) Cortante interfacial
4) Degradación química
5) Fusión superficial
Para el caso del proceso de triboadhesión, se infiere que durante la deposición de
material sobre la superficie se llevan a cabo cada una de estas etapas, hasta alcanzar la fusión
superficial en las zonas de contacto [37].
Capítulo II: Teoría básica
65
Así, durante el proceso de triboadhesión, gran número de pequeñas partículas pueden
ser adicionadas en la capa superficial distorsionada, sin embargo, el tamaño de las partículas
es muy importante, ya que, aunque la fresa produce altas temperaturas instantáneas o de flash
localizadas, estas son de muy corta duración, en estas condiciones, la coalescencia o fusión de
las partículas de un tamaño relativamente grande no ocurrirá. Por el contrario, si las partículas
de un tamaño relativamente pequeño, el metal alrededor de estas partículas puede, por lo tanto,
retener una estructura cristalina extremadamente fina. De esta manera una capa superficial de
un tamaño de grano relativamente pequeño, formando un nuevo material amorfo, se forma y
se mantiene estable [38].
2.11.3 Triboadhesión
La triboadhesión es una técnica para la obtención de una película delgada de
recubrimiento, cuya función es mejorar las propiedades de los materiales que se utilizan como
sustrato. Esto se logra adicionando material de aporte en forma de polvo, con diferentes
características fisicoquímicas al material base.
Las principales variables que gobiernan al proceso de triboadhesión son: la velocidad
relativa entre las superficies, la carga normal que se aplica durante el proceso, así como la
cantidad de polvo suministrado [37]. Tomando en cuenta que los diferentes modelos para el
calculo de temperaturas señalan que el incremento de temperatura está en función de la
velocidad y la carga aplicada al sistema. El proceso de triboadhesión consiste en aprovechar
el movimiento relativo entre las superficies, una de ellas es una fresa de algodón que gira con
sentido contrario al avance del sustrato, para así alcanzar entre ambas superficies una
velocidad tangencial relativa, que está en el rango de 210 m/s a 250 m/s de acuerdo a la
literatura [39]. Por lo que para lograr el recubrimiento de piezas mecánicas pequeñas y
rodamientos, se debe considerar la velocidad tangencial de la fresa y la velocidad de avance
del sustrato. En la zona de contacto que llamamos interface, se suministra material de aporte
Capítulo II: Teoría básica
66
en polvo, donde por la carga y la velocidad así como el coeficiente de fricción, se genera calor
en la interface.
2.11.4 Generación de calor
El calor que se genera por fricción, excita energéticamente la superficie del sustrato
donde se depositan las partículas del polvo, logrando de esta manera un nuevo material. Con
este proceso no se modifica la geometría del material base y no requiere de capas previas de
anclaje para una correcta deposición.
Por lo que con el método de la deposición por triboadhesión, se puede prácticamente
depositar sobre cualquier material, tomando en cuenta el área real de contacto, la carga normal
aplicada, y la velocidad tangencial para producir deslizamiento y generación de calor, así las
condiciones de plasticidad en el contacto se exceden y se genera un gradiente térmico que
podemos llamar friccional [40].
En conclusión, la generación de calor por fricción se produce en la interface, en donde la
fricción depende de las interacciones del material base con la fresa, tomando en cuenta la
carga normal aplicada, las asperezas superficiales y la velocidad tangencial para ocasionar una
deformación plástica.
Cuando, por el calor superficial en el sustrato, se alcanzan las temperaturas críticas
deseadas, se logra el reblandecimiento del material y cuando se suministra el material de
aporte en polvo que se utiliza para el recubrimiento.
Bibliografía
67
2.13 BIBLIOGRAFÍA
[1] Alnot, J. Strube, F. La chirurgie prothétique au niveau de l´épaule. Kiné. Scient.,
1993.
[2] Ohl X., Nérot C., Saddiki R., Dehoux E. 2010, Shoulder hemi arthroplasty
radiological and clinical outcomes at more than two years follow-up
[3] Matthew D. Saltzman, MD, Deana M. Mercer, MD, Winston J. Warme, MD,
Alexander L. Bertelsen, PA-C, Frederick A. Matsen III, MD, 2010. A method for
documenting the change in center of rotation with reverse total shoulder arthroplasty and
its application to a consecutive series of 68 shoulders having reconstruction with one of
two different reverse prostheses
[4] F. Lam,_, D.N. Bhatiaa, S.B. Mostofib, K. van Rooyena, J.F. de Beera, 2007.
Biomechanical considerations of the normal and rotator cuff deficient shoulders and the
reverse shoulder prosthesis
[5] Massimini D. Technique and application of a non-invasive three dimensional image
matching method for the study of total shoulder arthroplasty. University of California at los
angeles, 2005.
[6] A. Ramos, J.A. Sim˜oes Tetrahedral versus hexahedral finite elements in numerical
modelling of the proximal femur
[7] Cifuentes AO, Kalbag A. A performance study of tetrahedral and hexahedral elements
in 3D finite element structural analysis. Finite Elem Anal Design 1992
[8]. Ashman, B., Cowin, S., et al. A Continuous wave Technique for the Measurement of
the Elastic Properties of Cortical Bone. Journal of Biomechanics. 1984, vol. 17, p. 349-
361.
[9] J. D. Bronzino, “The biomedical engineering handbook”, Second Edition, IEEE Press,
USA.
[10] M. A. K. Liebschber, “Biomechanical considerations of animal used in tissue
engineering of bone,” Biomaterials, vol. 25, no. 9, pp. 1697-1714, May. 2003.
[11] B. W. Cunningham, S. J. Lewis, J. Long, A. E. Dmitriev, D. A. Linville y K. H.
Bridwell, “Biomechanical Evaluation of Lumbosacral Reconstruction Techniques for
Spondylolisthesis: An In Vitro Porcine Model”, Spine, Vol. 27 .
Bibliografía
68
[12] Philippe Favre, Jess G. Snedeker and Christian Gerber. “Numerical modelling of
the shoulder for clinical applications”
[13] Swanson . Human joints and their artificial replacements, (Editado por Thomas, Ch.
T.), Springfield, Illinois, 1989
[14] Neer CS. Glenohumeral arthroplasty design. Shoulder reconstruction. 1st ed.
Philadelphia: Saunders; 1990. p. 146-60.
[15] Zygmunt Haduch. Nació en Plowce-Sanok, Polonia. Es ingeniero mecánico y tiene
una Maestría en Mecánica, de la Universidad Politécnica de Cracovia (PC), en Polonia.
Hizo estudios de posgrado en la Facultad de Construcción de Barcos y Máquinas, en
Zagreb, ahora Croacia. Su Doctorado en Ciencias Técnicas es de la Universidad PC.
[16] Marco Antonio Loudovic Hernández-Rodríguez. Es ingeniero mecánico
electricista por la Facultad de Ingeniería Mecánica y Eléctrica de la UANL, donde también
realizó sus estudios de Maestría y Doctorado en el programa de Doctorado en Ingeniería de
Materiales. Actualmente pertenece al Sistema Nacional de Investigadores y a la Sociedad
Mexicana de Fundidores.
[17] Brady G. S., Materials Handbook, mC Graw Hill; E.U.A., 1971
[18] Kaw, AK. 2006. Mechanics of Composite Materials. 2nd ed. Taylor & Francis. Boca
Ratón, USA.
[19] Jones RM. 1999. Mechanics of Composites Materials. Taylor & Francis. London. UK
[20] Coussy O. 2004. Poromechanics. John Wiley & Sons Ltd, the Atrium, Southern Gate,
Chichester, West Sussex PO19 8SQ, England.
[21] Gross D, Seelig. 2006. T. Fracture mechanics with an Introduction to
micromechanics. Springer-Verlag Berlin Heidelberg.
[22] Torquato S. Theory of Composites Materials. Oxford University Press, London. 2001
[23] Eshelby JD. The Determination of the Elastic Field of an Ellipsoidal Inclusion, and
Related Problems. Proceedings of the Royal Society of London, Series A, Mathematical
and Physics Sciences, Vol. 241, No. 1226. pp 376 – 396
[24] Collini, L. Micromechanical Modeling of the Elasto-Plastic Behavior of
Heterogeneous Nodular Cast Iron. Tesis doctoral. Universita’ Degli Studi di Parma. 2004
[25] Jeffery GB. The Motion of Ellipsoidal Particles Immersed in a Viscous Fluid. Proc.
Ro. Soc. Lond. A. 1922, 102, 161-179.
Bibliografía
69
[26] Mori T, Tanaka K. Average Stress in Matrix and Average Elastic Energy of
Materials with Misfitting Inclusions. Acta Metallurgica, Vol. 21, May 1973.
[27] Dewey JM, The Elastic Constants of Materials Loaded with non.Rigid Fillers. J.
Appl. Phys. 18, 578 – 581 (1947)
[28] Kachanov M. Continuum Model of Medium with Cracks. Journal of the Engineering
Mechanics Division. ASCE. Vol. 106, No. EM5, Proc. Paper 15750, October 1980, pp
1039 – 1051.
[29] Kachanov M. On Crack – Microcrack Interactions. International Journal of Fracture
30 (1986) R65 – R72
[30]Kachanov M. Elastic Solids with many Cracks and Related Problems. Advances in
Applied Mechanics, Vol. 30. Academic Press. 1993. pp 259 445.
[31] Robinson K. Elastic Energy of an Ellipsoidal Inclusion in an Infinite Solid. J. Appl.
Phys. / Volume 22 / Issue 8.
[32] Tandon GP, Weng GJ. A Theory of Particle – Reinforced Plasticity. Journal of
Applied Mechanics. 55, 126 – 135. 1988
[33] Zhao YH, Tandon GP, Weng GJ. Elastic Moduli for a Class of Porous Materials.
Acta Mechanica. 76, 105 – 130, 1989.
[34] Rodríguez T., Programa de difusión tecnológica; ingeniería avanzada de superficies;
España 2003
[35] Brady G. S., Materials Handbook, mC Graw Hill; E.U.A., 1971
[36] Feng I-Ming, Metal Transfer and Wear, Journal of applied Physics; June 1952
[37] López Martínez Mario, Determinación de los parámetros para deposición uniforme
de MoS y Fe-75Si, por el proceso de triboadhesión, en aceros SAE 4140 y AISI 304. Tesis
de maestría en ingeniería mecánica. CENIDET, Cuernavaca, México, 2001
[38]Robles S., J. M. diseño y construcción de un dispositivo para el recubrimiento de
superficies curvas por fricción seca. Tesis de maestría en ingeniería mecánica. CENIDET,
Cuernavaca, México, 2000
[39] Rodríguez L., Soriano G., Colin O. Generación de calor y el proceso de
triboadhesión. Vi reunión internacional de ingeniería mecánica, S.L.P. México. Memoria
técnica 2000.
[40] Whithouse D., Archard J., The propieties of random surfaces of significanse in their
contact, London 1970
Capítulo III: Bases para el modelado mediante tomografías computarizadas
70
Capítulo 3 Bases para el modelado mediante
tomografías computarizadas
3.1 INTRODUCCIÓN
En las últimas décadas, las herramientas de cálculo numérico computacional, y en
especial el Método de los Elementos Finitos, se han popularizado en el campo de la
biomecánica y la ortopedia. Estas herramientas, originalmente desarrolladas en el campo de la
ingeniería, permiten crear los medios virtuales para el estudio del aparato músculo-
esquelético, y de esta manera determinar el comportamiento mecánico de sistemas hueso-
implante sin necesidad de intervención y experimentación en el cuerpo humano. Al mismo
tiempo, es posible desarrollar y trabajar con modelos individualizados que consideren las
características particulares de cada paciente y que ayuden en la exploración y búsqueda de
Capítulo III: Bases para el modelado mediante tomografías computarizadas
71
soluciones a problemas específicos antes de la intervención quirúrgica. La construcción de un
modelo de Elementos Finitos necesita definir la geometría del problema (morfología ósea),
junto con la información de sus propiedades mecánicas y cargas (fuerzas) aplicadas.
Una característica importante para tener éxito en la simulación computacional, además
de reproducir de manera cercana a la realidad las dimensiones y formas de los modelos
anatómicos, es representar las propiedades mecánicas cercanas a la realidad, así como las
condiciones de frontera para su análisis, ya que si estas son adecuadas, el resultado final se
aproximara de una manera más exacta a lo que ocurre en la realidad.
3.2 METODOLOGÍA DEL MODELADO 3D DEL HÚMERO POR TAC’S
El propósito de esta metodología es la generación de un modelo 3D de cualquier pieza
ósea del cuerpo humano, para su aplicación en el modelo por el método de elementos finitos.
Las imágenes médicas procedentes de los estudios de tomografía computarizada (TC) son
herramientas usuales para el diagnóstico médico. El reformateo y procesamiento de las
imágenes axiales de TC permite obtener reconstrucciones bidimensionales (2D) en el plano
sagital, coronal y oblicuo o tridimensional (3D) mediante la utilización de software específico.
Aunque muy potentes y eficaces, estas técnicas orientadas a la visualización y construcción de
imágenes no proporcionan en forma directa la información necesaria para la construcción de
modelos de MEF [1].
En la figura 3.1 se muestra el procedimiento general de la obtención de la geometría
3D del húmero a partir de las tomografías axial computarizadas (TAC’s), donde el primer paso
(1) es el estudio tomográfico a la persona que requiere la prótesis de hombro, el siguiente
paso (2) es la segmentación de las imágenes tomográficas, para obtener una región 3D del
húmero (3), y así tener la vista anatómica 3D obtenida en el proceso de la segmentación (4),
de aquí se suaviza y refina (5) el modelo el modelo 3D del humero para quitar las
imperfecciones de la segmentación y obtener la geometría cercana a la realidad del húmero.

Capítulo III: Bases para el modelado mediante tomografías computarizadas
72
Imágenes TAC’S
Segmentación 2D
Modelo 3D
obtenido
Vista anatómica
3D
Suavizado y Refinado
volumétrico
Imagen 3D IGES
Modelo
CAD
Posteriormente convertir en formato IGES (6) y obtener el modelo CAD del húmero que es
evaluado por el método de elementos finitos (7).
Figura 3.1 Pasos para la generación del modelo 3D del húmero a partir de TAC’s
(1)
(2)
(3)
(4)
(5)
(6)
(7)
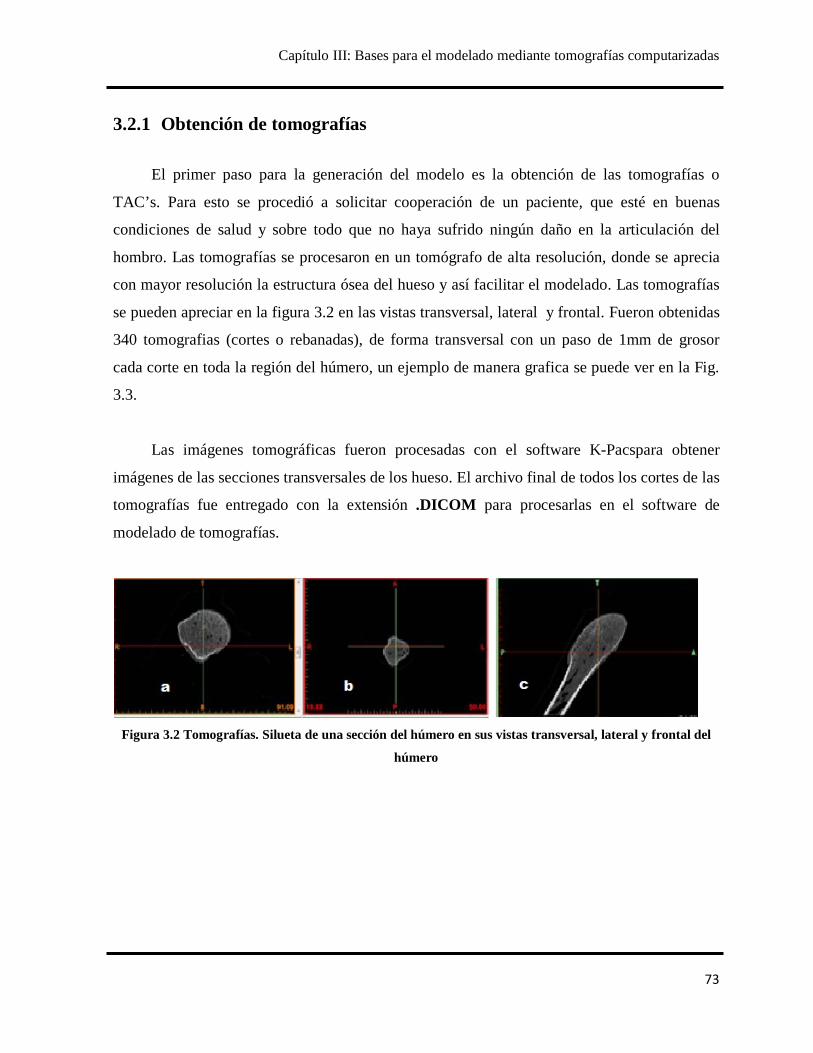
Capítulo III: Bases para el modelado mediante tomografías computarizadas
73
3.2.1 Obtención de tomografías
El primer paso para la generación del modelo es la obtención de las tomografías o
TAC’s. Para esto se procedió a solicitar cooperación de un paciente, que esté en buenas
condiciones de salud y sobre todo que no haya sufrido ningún daño en la articulación del
hombro. Las tomografías se procesaron en un tomógrafo de alta resolución, donde se aprecia
con mayor resolución la estructura ósea del hueso y así facilitar el modelado. Las tomografías
se pueden apreciar en la figura 3.2 en las vistas transversal, lateral y frontal. Fueron obtenidas
340 tomografias (cortes o rebanadas), de forma transversal con un paso de 1mm de grosor
cada corte en toda la región del húmero, un ejemplo de manera grafica se puede ver en la Fig.
3.3.
Las imágenes tomográficas fueron procesadas con el software K-Pacspara obtener
imágenes de las secciones transversales de los hueso. El archivo final de todos los cortes de las
tomografías fue entregado con la extensión .DICOM para procesarlas en el software de
modelado de tomografías.
Figura 3.2 Tomografías. Silueta de una sección del húmero en sus vistas transversal, lateral y frontal del
húmero
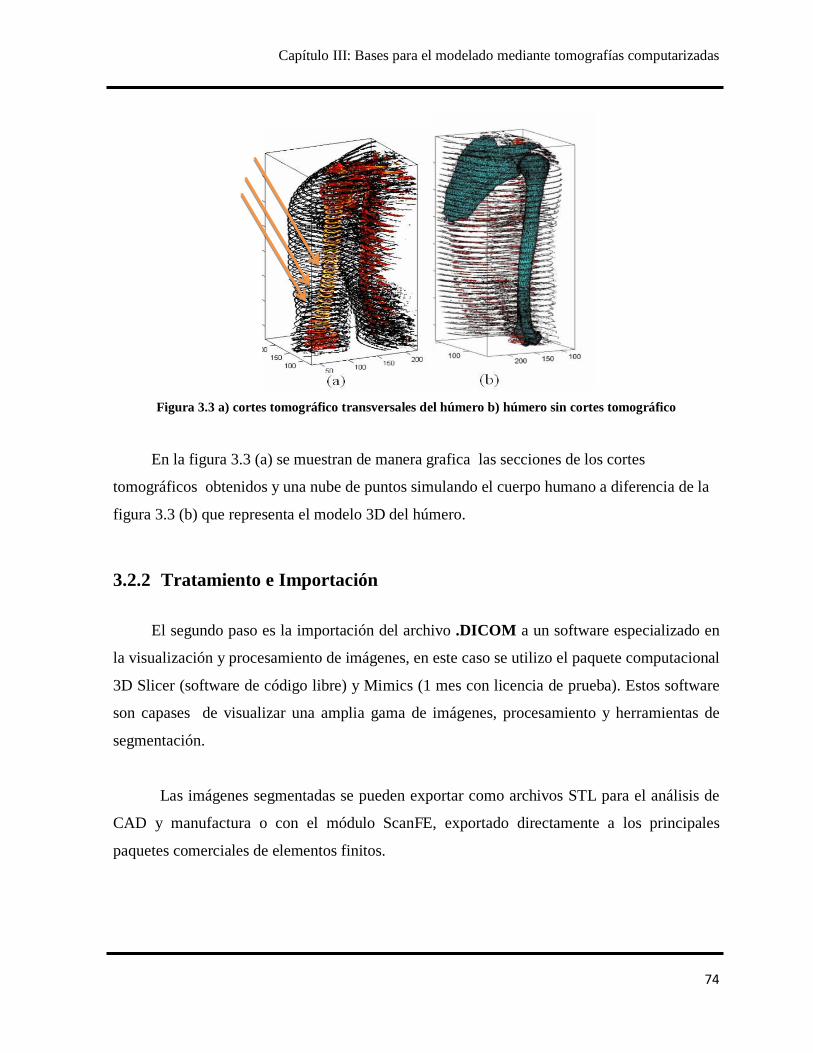
Capítulo III: Bases para el modelado mediante tomografías computarizadas
74
Figura 3.3 a) cortes tomográfico transversales del húmero b) húmero sin cortes tomográfico
En la figura 3.3 (a) se muestran de manera grafica las secciones de los cortes
tomográficos obtenidos y una nube de puntos simulando el cuerpo humano a diferencia de la
figura 3.3 (b) que representa el modelo 3D del húmero.
3.2.2 Tratamiento e Importación
El segundo paso es la importación del archivo .DICOM a un software especializado en
la visualización y procesamiento de imágenes, en este caso se utilizo el paquete computacional
3D Slicer (software de código libre) y Mimics (1 mes con licencia de prueba). Estos software
son capases de visualizar una amplia gama de imágenes, procesamiento y herramientas de
segmentación.
Las imágenes segmentadas se pueden exportar como archivos STL para el análisis de
CAD y manufactura o con el módulo ScanFE, exportado directamente a los principales
paquetes comerciales de elementos finitos.

Capítulo III: Bases para el modelado mediante tomografías computarizadas
75
Una vez importadas las 340 imágenes tomográficas en el programa 3D Slicer, se
procede a editarlos. Una vez comprobado que todas las imágenes se encuentran en el software
se empieza el trabajo de segmentación imagen por imagen como se describe a continuación:
1) El primer paso es con la herramienta de segmentación subrayar el contorno de las
zonas del corte transversal para delimitar el área de interés, en este caso el hueso
cortical del húmero, Como se muestra en la figura 3.4.
Figura 3.4. Contorno seleccionado de color verde del corte transversal del húmero
2) El segundo paso es rellenar el contorno interior generado en el paso anterior, teniendo
cuidado de seleccionar únicamente el tejido de interés en este caso el hueso esponjoso
o trabecular, como se muestra en la figura 3.5.
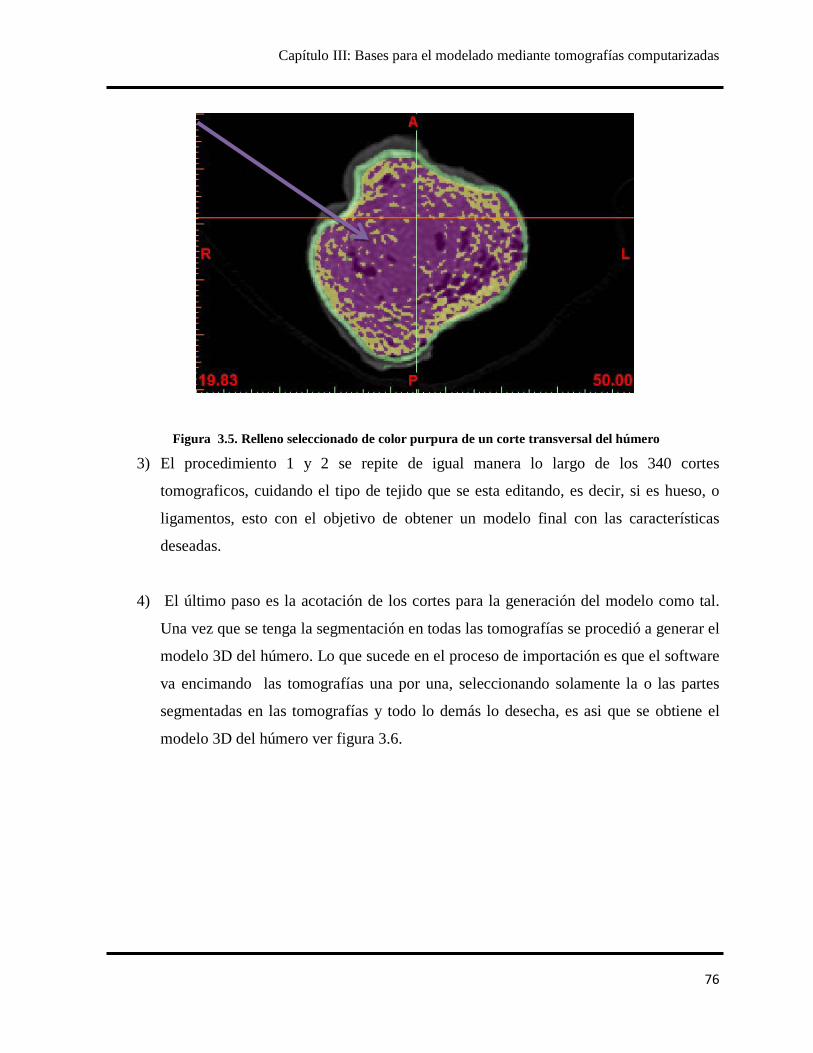
Capítulo III: Bases para el modelado mediante tomografías computarizadas
76
Figura 3.5. Relleno seleccionado de color purpura de un corte transversal del húmero
3) El procedimiento 1 y 2 se repite de igual manera lo largo de los 340 cortes
tomograficos, cuidando el tipo de tejido que se esta editando, es decir, si es hueso, o
ligamentos, esto con el objetivo de obtener un modelo final con las características
deseadas.
4) El último paso es la acotación de los cortes para la generación del modelo como tal.
Una vez que se tenga la segmentación en todas las tomografías se procedió a generar el
modelo 3D del húmero. Lo que sucede en el proceso de importación es que el software
va encimando las tomografías una por una, seleccionando solamente la o las partes
segmentadas en las tomografías y todo lo demás lo desecha, es asi que se obtiene el
modelo 3D del húmero ver figura 3.6.
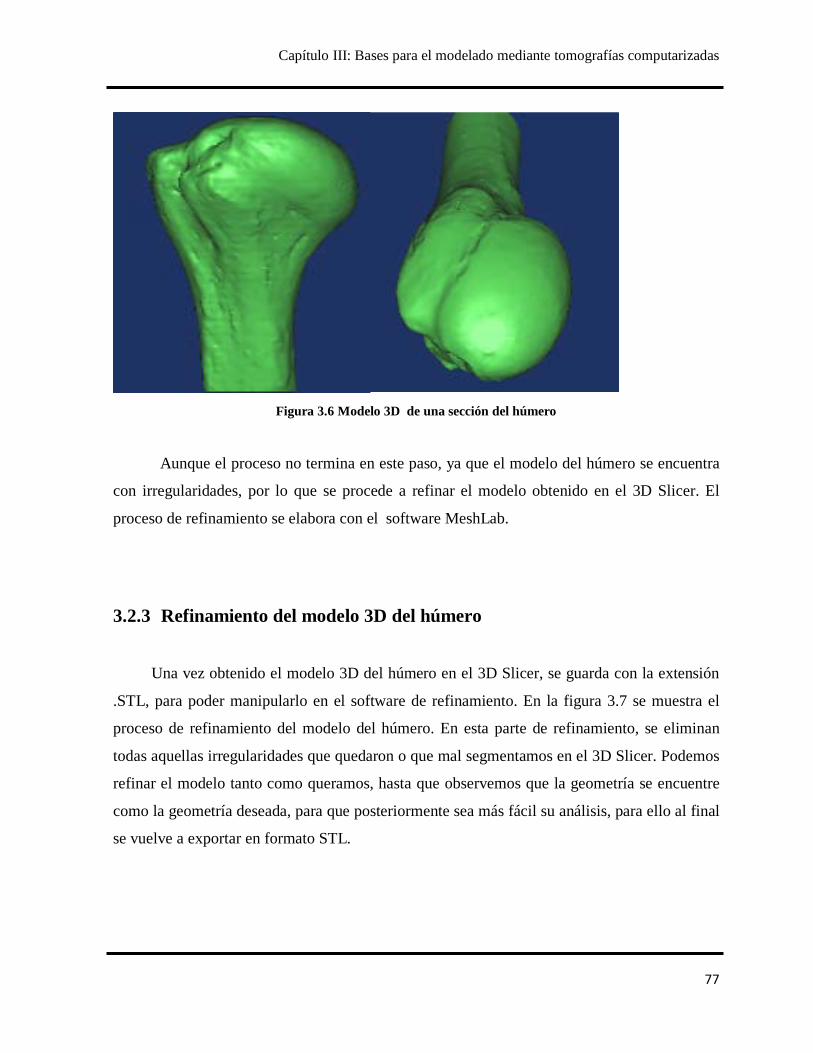
Capítulo III: Bases para el modelado mediante tomografías computarizadas
77
Figura 3.6 Modelo 3D de una sección del húmero
Aunque el proceso no termina en este paso, ya que el modelo del húmero se encuentra
con irregularidades, por lo que se procede a refinar el modelo obtenido en el 3D Slicer. El
proceso de refinamiento se elabora con el software MeshLab.
3.2.3 Refinamiento del modelo 3D del húmero
Una vez obtenido el modelo 3D del húmero en el 3D Slicer, se guarda con la extensión
.STL, para poder manipularlo en el software de refinamiento. En la figura 3.7 se muestra el
proceso de refinamiento del modelo del húmero. En esta parte de refinamiento, se eliminan
todas aquellas irregularidades que quedaron o que mal segmentamos en el 3D Slicer. Podemos
refinar el modelo tanto como queramos, hasta que observemos que la geometría se encuentre
como la geometría deseada, para que posteriormente sea más fácil su análisis, para ello al final
se vuelve a exportar en formato STL.
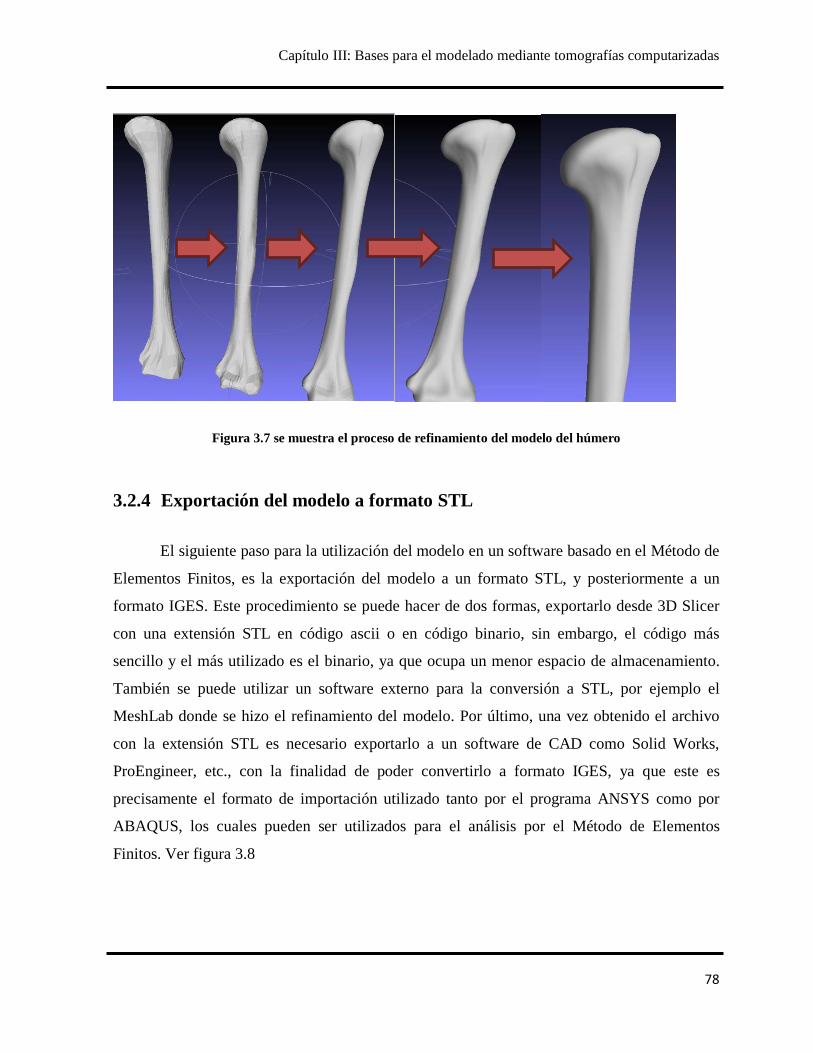
Capítulo III: Bases para el modelado mediante tomografías computarizadas
78
Figura 3.7 se muestra el proceso de refinamiento del modelo del húmero
3.2.4 Exportación del modelo a formato STL
El siguiente paso para la utilización del modelo en un software basado en el Método de
Elementos Finitos, es la exportación del modelo a un formato STL, y posteriormente a un
formato IGES. Este procedimiento se puede hacer de dos formas, exportarlo desde 3D Slicer
con una extensión STL en código ascii o en código binario, sin embargo, el código más
sencillo y el más utilizado es el binario, ya que ocupa un menor espacio de almacenamiento.
También se puede utilizar un software externo para la conversión a STL, por ejemplo el
MeshLab donde se hizo el refinamiento del modelo. Por último, una vez obtenido el archivo
con la extensión STL es necesario exportarlo a un software de CAD como Solid Works,
ProEngineer, etc., con la finalidad de poder convertirlo a formato IGES, ya que este es
precisamente el formato de importación utilizado tanto por el programa ANSYS como por
ABAQUS, los cuales pueden ser utilizados para el análisis por el Método de Elementos
Finitos. Ver figura 3.8
Capítulo III: Bases para el modelado mediante tomografías computarizadas
79
Figura 3.8. Modelo guardado en código binario en formato STL
Una vez que se tiene el modelo 3D del húmero, se importa el archivo STL a un
software CAD, tomando en cuenta la geometría del húmero, y sobre todo de la cabeza
humeral, que es donde se hace el corte a 135º en sentido contrario a las manecilla del reloj o
45º en sentido de las manecillas del reloj, en el cuello anatómico del húmero ver figura 3.9,
tomando en cuenta los datos del Centro de Educación Médica e Investigaciones Clínicas
(CEMIC). Buenos Aires, Argentina. Esto para introducir la prótesis anatómica o cualquier
otra, el corte en el modelo del húmero obtenido se muestra en la figura 3.10 [2,3,4]. Cabe
señalar que la prótesis anatómica se diseñara en base a las características del modelo 3D del
húmero.
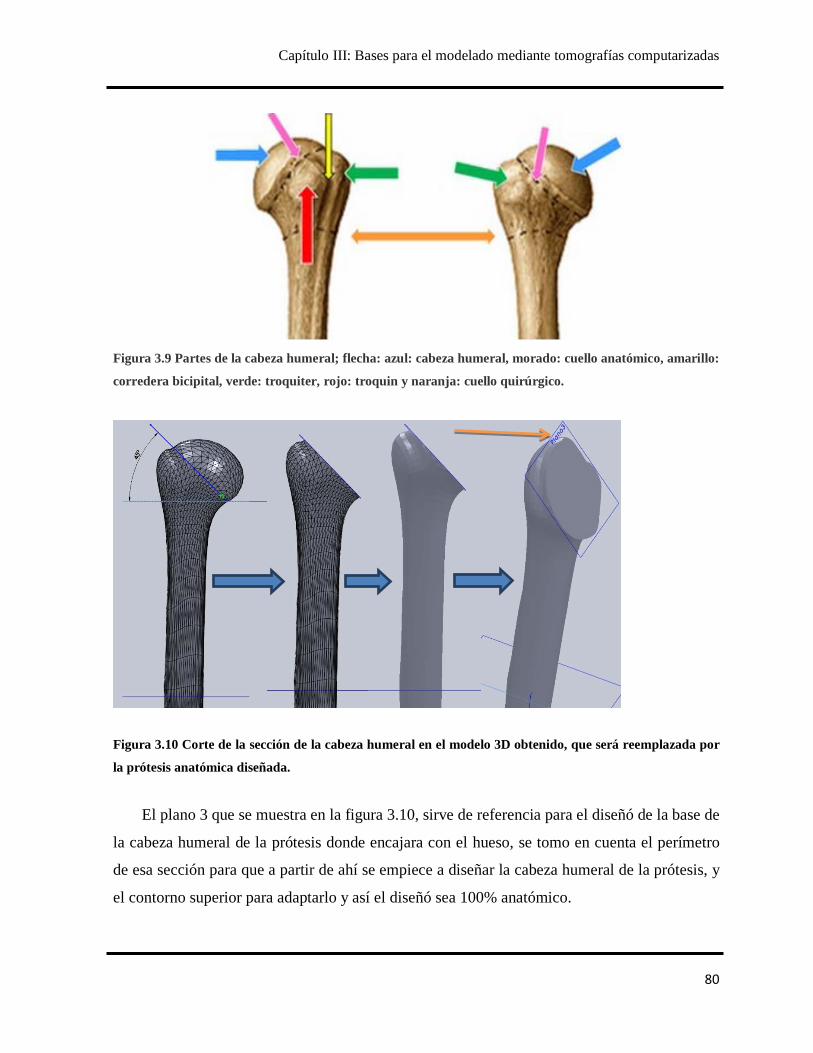
Capítulo III: Bases para el modelado mediante tomografías computarizadas
80
Figura 3.9 Partes de la cabeza humeral; flecha: azul: cabeza humeral, morado: cuello anatómico, amarillo:
corredera bicipital, verde: troquiter, rojo: troquin y naranja: cuello quirúrgico.
Figura 3.10 Corte de la sección de la cabeza humeral en el modelo 3D obtenido, que será reemplazada por
la prótesis anatómica diseñada.
El plano 3 que se muestra en la figura 3.10, sirve de referencia para el diseñó de la base de
la cabeza humeral de la prótesis donde encajara con el hueso, se tomo en cuenta el perímetro
de esa sección para que a partir de ahí se empiece a diseñar la cabeza humeral de la prótesis, y
el contorno superior para adaptarlo y así el diseñó sea 100% anatómico.
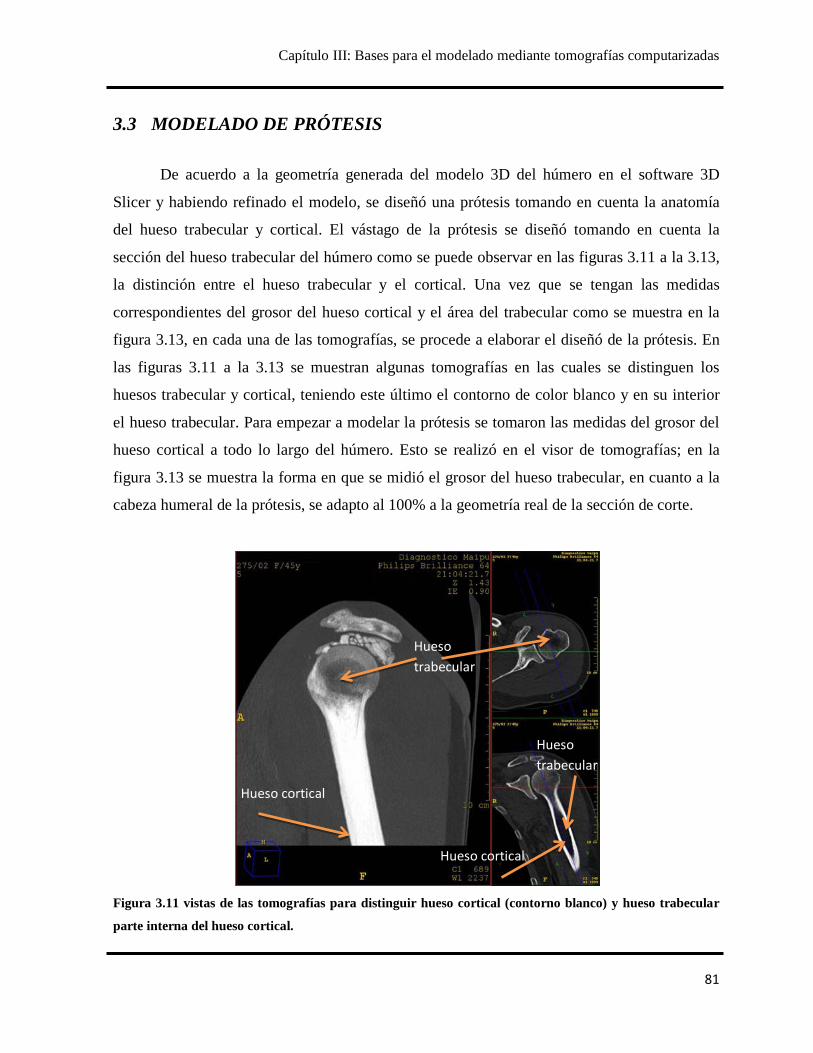
Capítulo III: Bases para el modelado mediante tomografías computarizadas
81
3.3 MODELADO DE PRÓTESIS
De acuerdo a la geometría generada del modelo 3D del húmero en el software 3D
Slicer y habiendo refinado el modelo, se diseñó una prótesis tomando en cuenta la anatomía
del hueso trabecular y cortical. El vástago de la prótesis se diseñó tomando en cuenta la
sección del hueso trabecular del húmero como se puede observar en las figuras 3.11 a la 3.13,
la distinción entre el hueso trabecular y el cortical. Una vez que se tengan las medidas
correspondientes del grosor del hueso cortical y el área del trabecular como se muestra en la
figura 3.13, en cada una de las tomografías, se procede a elaborar el diseñó de la prótesis. En
las figuras 3.11 a la 3.13 se muestran algunas tomografías en las cuales se distinguen los
huesos trabecular y cortical, teniendo este último el contorno de color blanco y en su interior
el hueso trabecular. Para empezar a modelar la prótesis se tomaron las medidas del grosor del
hueso cortical a todo lo largo del húmero. Esto se realizó en el visor de tomografías; en la
figura 3.13 se muestra la forma en que se midió el grosor del hueso trabecular, en cuanto a la
cabeza humeral de la prótesis, se adapto al 100% a la geometría real de la sección de corte.
Figura 3.11 vistas de las tomografías para distinguir hueso cortical (contorno blanco) y hueso trabecular
parte interna del hueso cortical. Hueso cortical
Hueso trabecular
Hueso cortical
Hueso trabecular
Hueso cortical
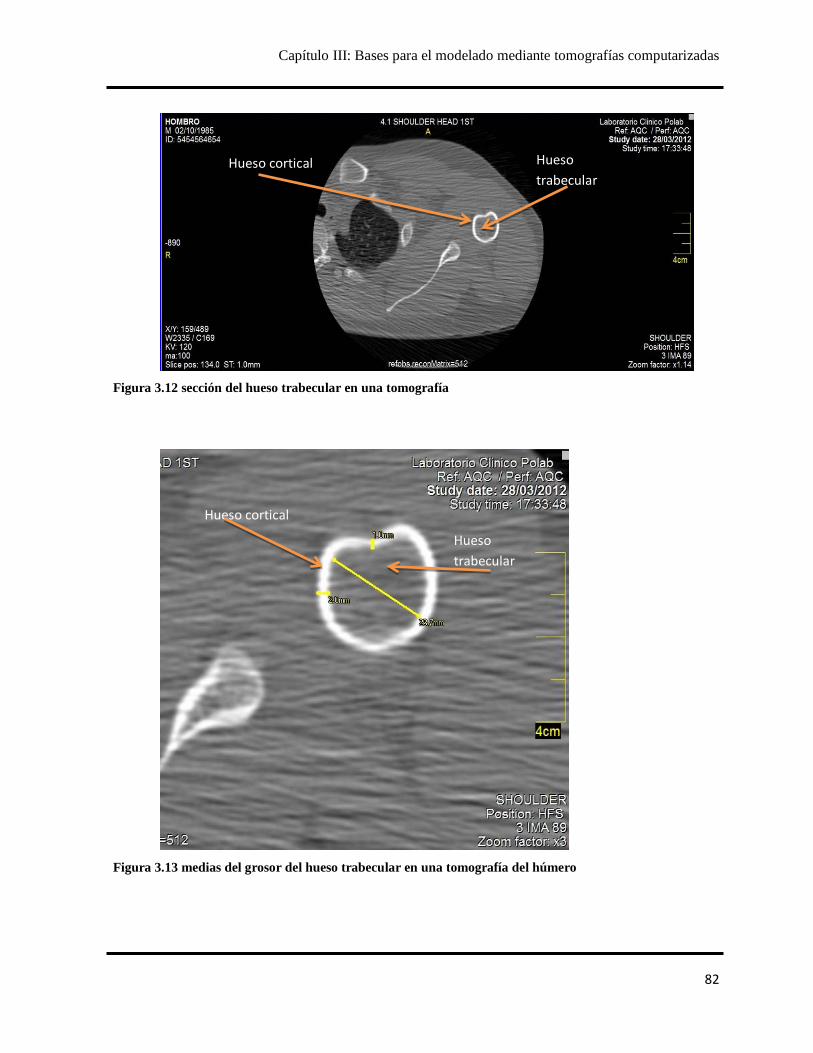
Capítulo III: Bases para el modelado mediante tomografías computarizadas
82
Figura 3.12 sección del hueso trabecular en una tomografía
Figura 3.13 medias del grosor del hueso trabecular en una tomografía del húmero
Hueso cortical
Hueso trabecular
Hueso trabecular
Hueso cortical
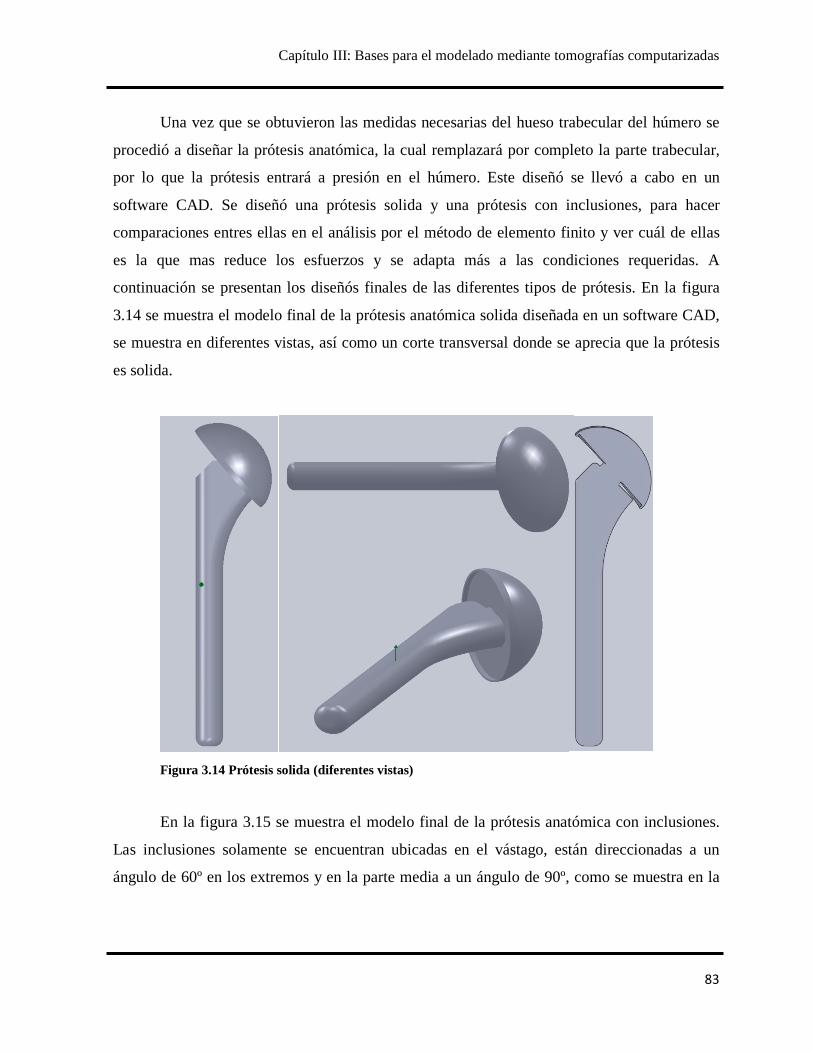
Capítulo III: Bases para el modelado mediante tomografías computarizadas
83
Una vez que se obtuvieron las medidas necesarias del hueso trabecular del húmero se
procedió a diseñar la prótesis anatómica, la cual remplazará por completo la parte trabecular,
por lo que la prótesis entrará a presión en el húmero. Este diseñó se llevó a cabo en un
software CAD. Se diseñó una prótesis solida y una prótesis con inclusiones, para hacer
comparaciones entres ellas en el análisis por el método de elemento finito y ver cuál de ellas
es la que mas reduce los esfuerzos y se adapta más a las condiciones requeridas. A
continuación se presentan los diseñós finales de las diferentes tipos de prótesis. En la figura
3.14 se muestra el modelo final de la prótesis anatómica solida diseñada en un software CAD,
se muestra en diferentes vistas, así como un corte transversal donde se aprecia que la prótesis
es solida.
Figura 3.14 Prótesis solida (diferentes vistas)
En la figura 3.15 se muestra el modelo final de la prótesis anatómica con inclusiones.
Las inclusiones solamente se encuentran ubicadas en el vástago, están direccionadas a un
ángulo de 60º en los extremos y en la parte media a un ángulo de 90º, como se muestra en la
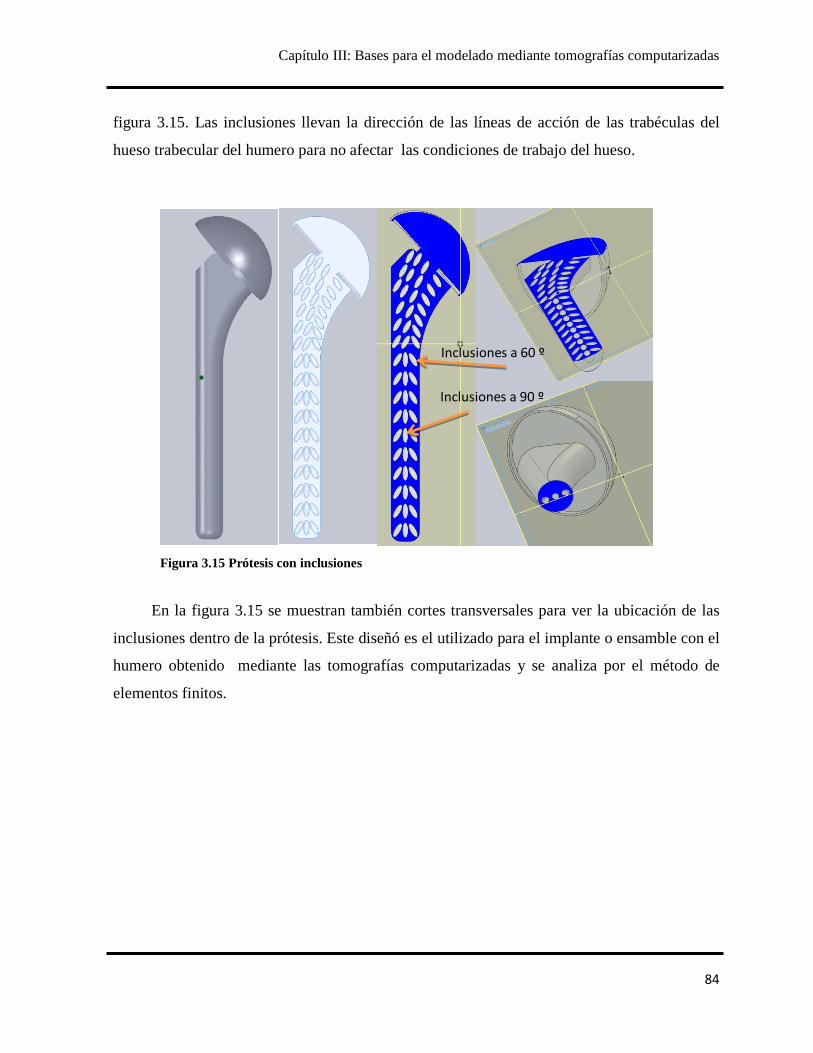
Capítulo III: Bases para el modelado mediante tomografías computarizadas
84
figura 3.15. Las inclusiones llevan la dirección de las líneas de acción de las trabéculas del
hueso trabecular del humero para no afectar las condiciones de trabajo del hueso.
Figura 3.15 Prótesis con inclusiones
En la figura 3.15 se muestran también cortes transversales para ver la ubicación de las
inclusiones dentro de la prótesis. Este diseñó es el utilizado para el implante o ensamble con el
humero obtenido mediante las tomografías computarizadas y se analiza por el método de
elementos finitos.
Inclusiones a 60 º
Inclusiones a 90 º
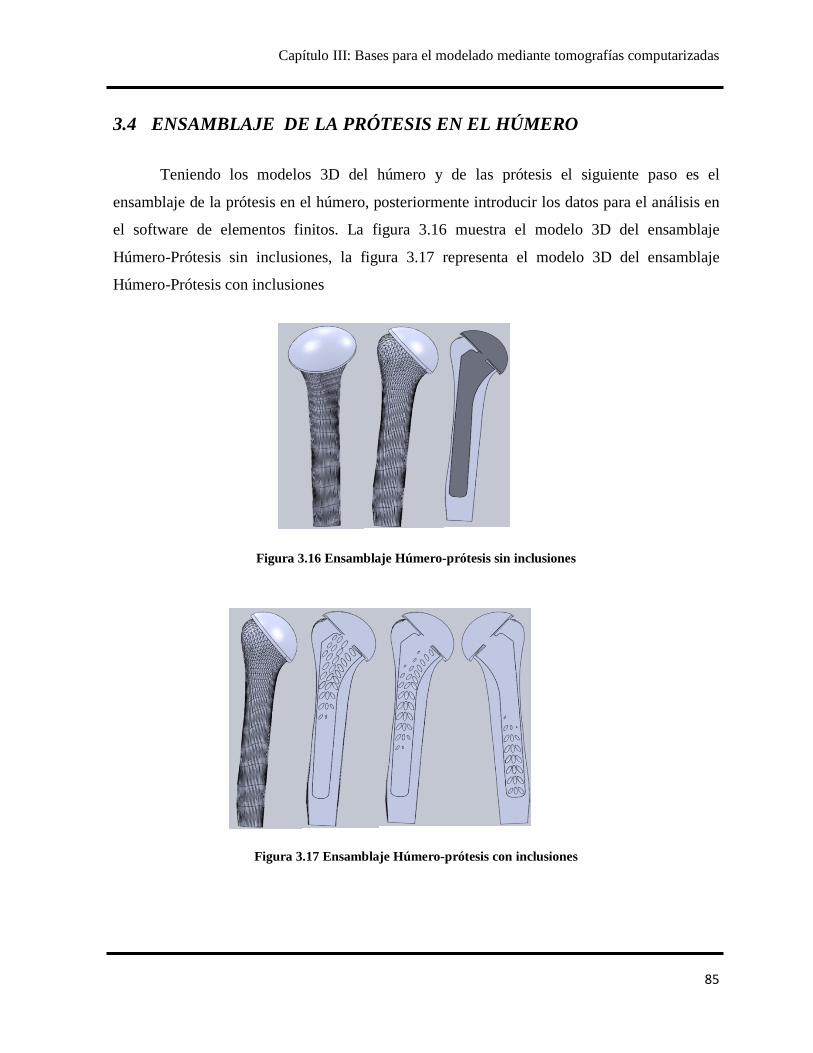
Capítulo III: Bases para el modelado mediante tomografías computarizadas
85
3.4 ENSAMBLAJE DE LA PRÓTESIS EN EL HÚMERO
Teniendo los modelos 3D del húmero y de las prótesis el siguiente paso es el
ensamblaje de la prótesis en el húmero, posteriormente introducir los datos para el análisis en
el software de elementos finitos. La figura 3.16 muestra el modelo 3D del ensamblaje
Húmero-Prótesis sin inclusiones, la figura 3.17 representa el modelo 3D del ensamblaje
Húmero-Prótesis con inclusiones
Figura 3.16 Ensamblaje Húmero-prótesis sin inclusiones
Figura 3.17 Ensamblaje Húmero-prótesis con inclusiones
Capítulo III: Bases para el modelado mediante tomografías computarizadas
86
Una vez que se tienen los modelos de los ensambles como se aprecia en las figuras 3.16
y 3.17, se procede a elaborar el análisis de esfuerzos por el método de los elementos finitos.
En el siguiente capítulo se la agregan las condiciones de fronteras y fuerzas que actúan en la
articulación glenohumeral.
Con la metodología que se presenta en este capítulo, se puede diseñar modelos de
estructuras óseas del cuerpo humano, para después ser evaluados según las necesidades que se
requieran. Esta metodología es de utilidad en la parte medica, ya qué las cirugías de
evaluación de prótesis en los pacientes pueden ser sustituidas, debido a los diseños obtenidos
por las tomografías y los análisis elaborados por el método de elementos finitos.
Bibliografía
87
3.5 BIBLIOGRAFÍA
[1] F. Lama,_, D.N. Bhatiaa, S.B. Mostofib, K. van Rooyena, J.F. de Beera.
“Biomechanical considerations of the normal and rotator cuff deficient shoulders and the
reverse shoulder prosthesis”
[2] Neer C, Craig E, Fukuda H. Cuff tear arthropathy. J Bone Joint Surg Am1983;
65A:1232-44.
[3] Hamada K, Fukuda H, Mikasa M, Kobayashi Y. Roentgenographic findings in
massive rotator cuff tears. A long-term observation. Clin Orthop Relat Res 1990;254:92-6.
[4] Bohsali KI, Wirth MA, Rockwood CA, Jr. Complications of total shoulder
arthroplasty. J Bone Joint Surg Am 2006;88(10):2279-92
[5] J. Michael Starbuck et al, 2001, Energy absorption in chopped carbón fiber
compression molded composites, U.S. Departamen of Energy
[6] Barbero, Ever J. 1999, Introduction to composite materials design, Philadelphia,
London: Taylor Francis
[7] Eshelby J.D., 1957, The determination of the elastic field of an ellipsoidal inclusion
and related problems, Proc. Royal Soc. Of London, Ser A, Vol. 241, 376.
[8] Eshelby J.D., 1959, The elastic field outside of elliptical inclusion, proceedings of the
royal society of London. Series A, Mathematical and Physical Sciences, Vol 252, No.
1271, pp 561-569
[9] Eshelby J.D., 1961, Elastic inclusion and Inhomogeneities, prog. Solid mech. 2, 89-
140 University of Sheffiedd
[10] Kurt C. G., Alan D. F. and Kevin P. W., 1919, An overview of self-consistent
methods for fiber reinforced composites, NASA Technical Memorandum N91-19232.
[11] Aihong Zhao, Jilin Yu, 2000, The overall elastic moduli of orthotropic composite
and description of orthotropic damage of materials, International Journal of solid and
structured, 6755-6771
[12] Henry L. Langhaar, 1962, Energy Methods in applied Mechanics, John Wiley and
Sons, cap. 4
[13] Andersson Joakim, Microengineering CVD Diamond surface, tribology and
applications, Dissertation presented for the degree of doctor of philosophy. Uppsala
University, Sweden, 2004
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
88
Capítulo 4 Análisis numérico del ensamble
prótesis-húmero
4.1 INTRODUCCION
En este capítulo se presentan los resultados obtenidos de las simulaciones de la
prótesis de hombro anatómica. Los resultados abarcan: estudio de esfuerzos y deformación
de la prótesis con la aleación comercial Co-Cr-Mo, prótesis sólida de UHMWP, prótesis
con inclusiones de UHMWP, hueso (húmero) y ensamble de éstas prótesis con el húmero.
Los resultados presentados son para condiciones de cargas, resultantes de los principales
músculos que actúan en la articulación glenohumeral en abducción a 90º.
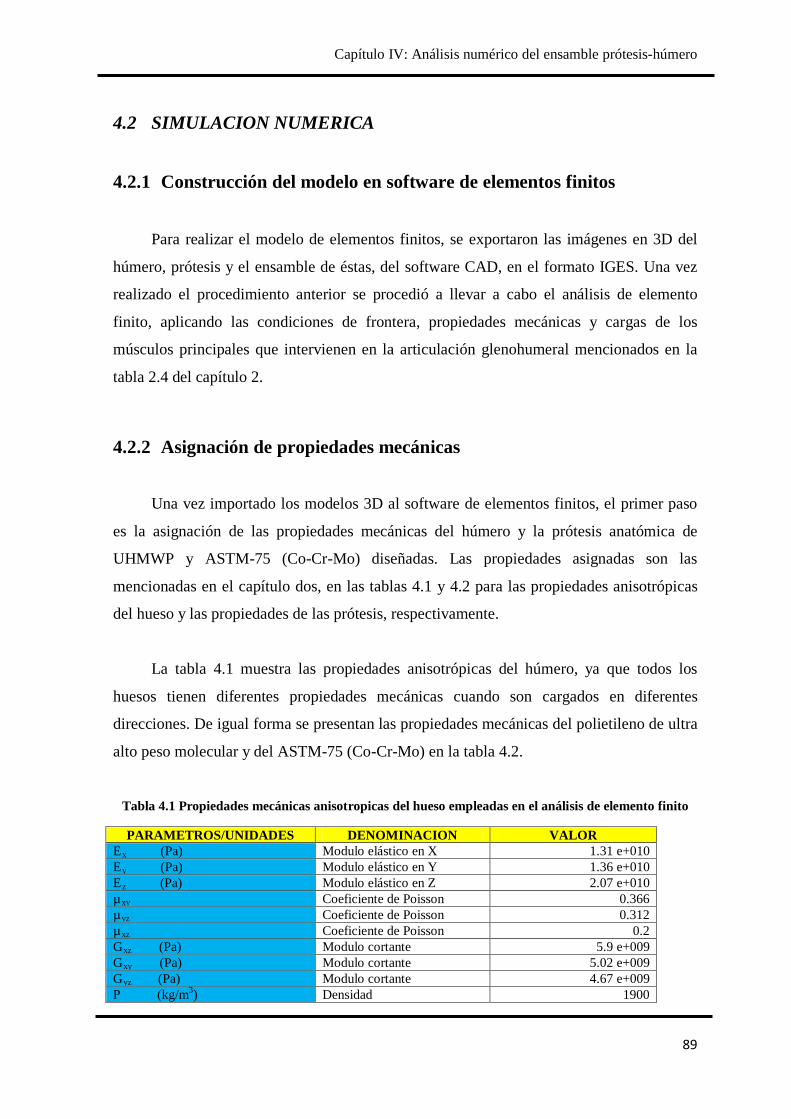
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
89
4.2 SIMULACION NUMERICA
4.2.1 Construcción del modelo en software de elementos finitos
Para realizar el modelo de elementos finitos, se exportaron las imágenes en 3D del
húmero, prótesis y el ensamble de éstas, del software CAD, en el formato IGES. Una vez
realizado el procedimiento anterior se procedió a llevar a cabo el análisis de elemento
finito, aplicando las condiciones de frontera, propiedades mecánicas y cargas de los
músculos principales que intervienen en la articulación glenohumeral mencionados en la
tabla 2.4 del capítulo 2.
4.2.2 Asignación de propiedades mecánicas
Una vez importado los modelos 3D al software de elementos finitos, el primer paso
es la asignación de las propiedades mecánicas del húmero y la prótesis anatómica de
UHMWP y ASTM-75 (Co-Cr-Mo) diseñadas. Las propiedades asignadas son las
mencionadas en el capítulo dos, en las tablas 4.1 y 4.2 para las propiedades anisotrópicas
del hueso y las propiedades de las prótesis, respectivamente.
La tabla 4.1 muestra las propiedades anisotrópicas del húmero, ya que todos los
huesos tienen diferentes propiedades mecánicas cuando son cargados en diferentes
direcciones. De igual forma se presentan las propiedades mecánicas del polietileno de ultra
alto peso molecular y del ASTM-75 (Co-Cr-Mo) en la tabla 4.2.
Tabla 4.1 Propiedades mecánicas anisotropicas del hueso empleadas en el análisis de elemento finito
PARAMETROS/UNIDADES DENOMINACION VALOR Ex (Pa) Modulo elástico en X 1.31 e+010 Ey (Pa) Modulo elástico en Y 1.36 e+010 Ez (Pa) Modulo elástico en Z 2.07 e+010 µxy Coeficiente de Poisson 0.366 µyz Coeficiente de Poisson 0.312 µxz Coeficiente de Poisson 0.2 Gxz (Pa) Modulo cortante 5.9 e+009 Gxy (Pa) Modulo cortante 5.02 e+009 Gyz (Pa) Modulo cortante 4.67 e+009 Ρ (kg/m3) Densidad 1900
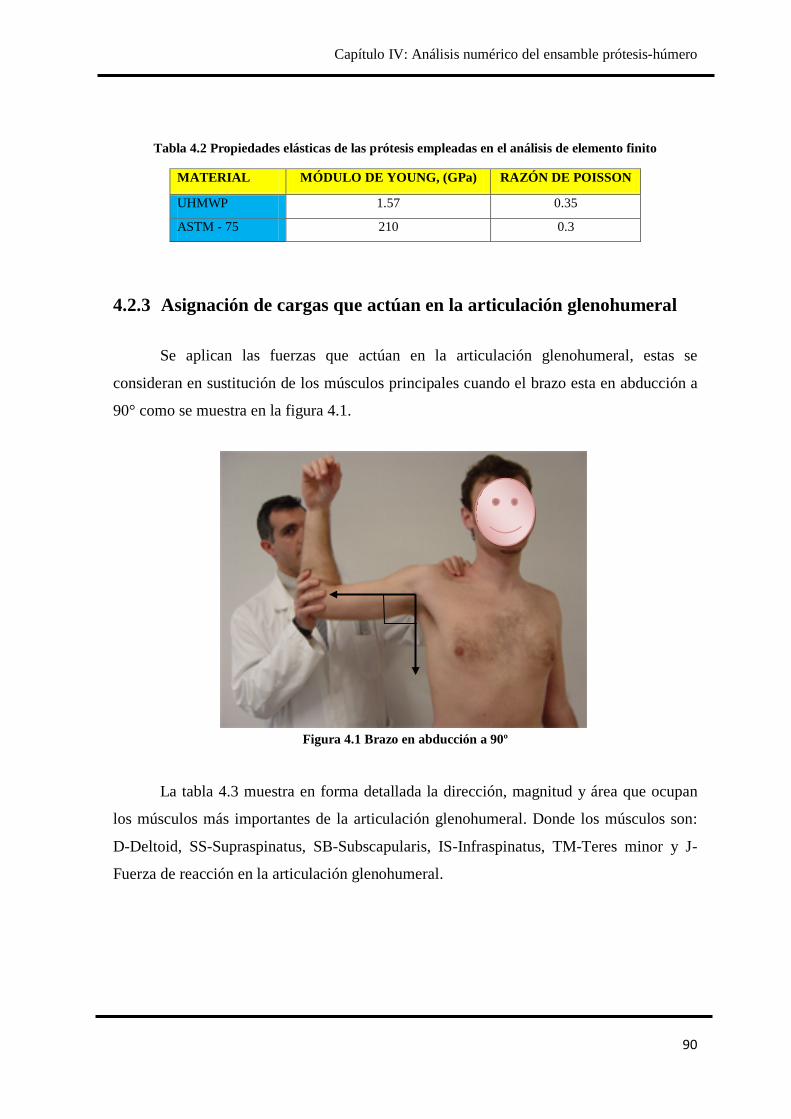
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
90
Tabla 4.2 Propiedades elásticas de las prótesis empleadas en el análisis de elemento finito
MATERIAL MÓDULO DE YOUNG, (GPa) RAZÓN DE POISSON
UHMWP 1.57 0.35
ASTM - 75 210 0.3
4.2.3 Asignación de cargas que actúan en la articulación glenohumeral
Se aplican las fuerzas que actúan en la articulación glenohumeral, estas se
consideran en sustitución de los músculos principales cuando el brazo esta en abducción a
90° como se muestra en la figura 4.1.
Figura 4.1 Brazo en abducción a 90º
La tabla 4.3 muestra en forma detallada la dirección, magnitud y área que ocupan
los músculos más importantes de la articulación glenohumeral. Donde los músculos son:
D-Deltoid, SS-Supraspinatus, SB-Subscapularis, IS-Infraspinatus, TM-Teres minor y J-
Fuerza de reacción en la articulación glenohumeral.
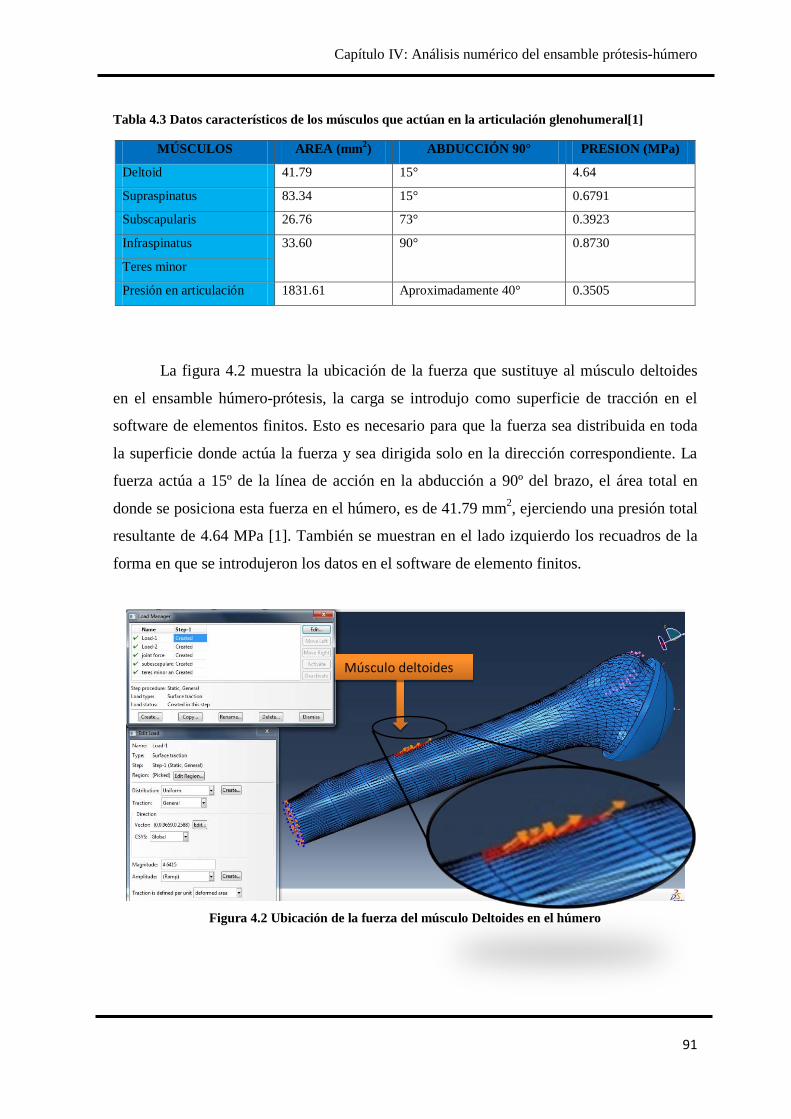
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
91
Tabla 4.3 Datos característicos de los músculos que actúan en la articulación glenohumeral[1]
MÚSCULOS AREA (mm2) ABDUCCIÓN 90° PRESION (MPa)
Deltoid 41.79 15° 4.64
Supraspinatus 83.34 15° 0.6791
Subscapularis 26.76 73° 0.3923
Infraspinatus 33.60 90° 0.8730
Teres minor
Presión en articulación 1831.61 Aproximadamente 40° 0.3505
La figura 4.2 muestra la ubicación de la fuerza que sustituye al músculo deltoides
en el ensamble húmero-prótesis, la carga se introdujo como superficie de tracción en el
software de elementos finitos. Esto es necesario para que la fuerza sea distribuida en toda
la superficie donde actúa la fuerza y sea dirigida solo en la dirección correspondiente. La
fuerza actúa a 15º de la línea de acción en la abducción a 90º del brazo, el área total en
donde se posiciona esta fuerza en el húmero, es de 41.79 mm2, ejerciendo una presión total
resultante de 4.64 MPa [1]. También se muestran en el lado izquierdo los recuadros de la
forma en que se introdujeron los datos en el software de elemento finitos.
Figura 4.2 Ubicación de la fuerza del músculo Deltoides en el húmero
Músculo deltoides
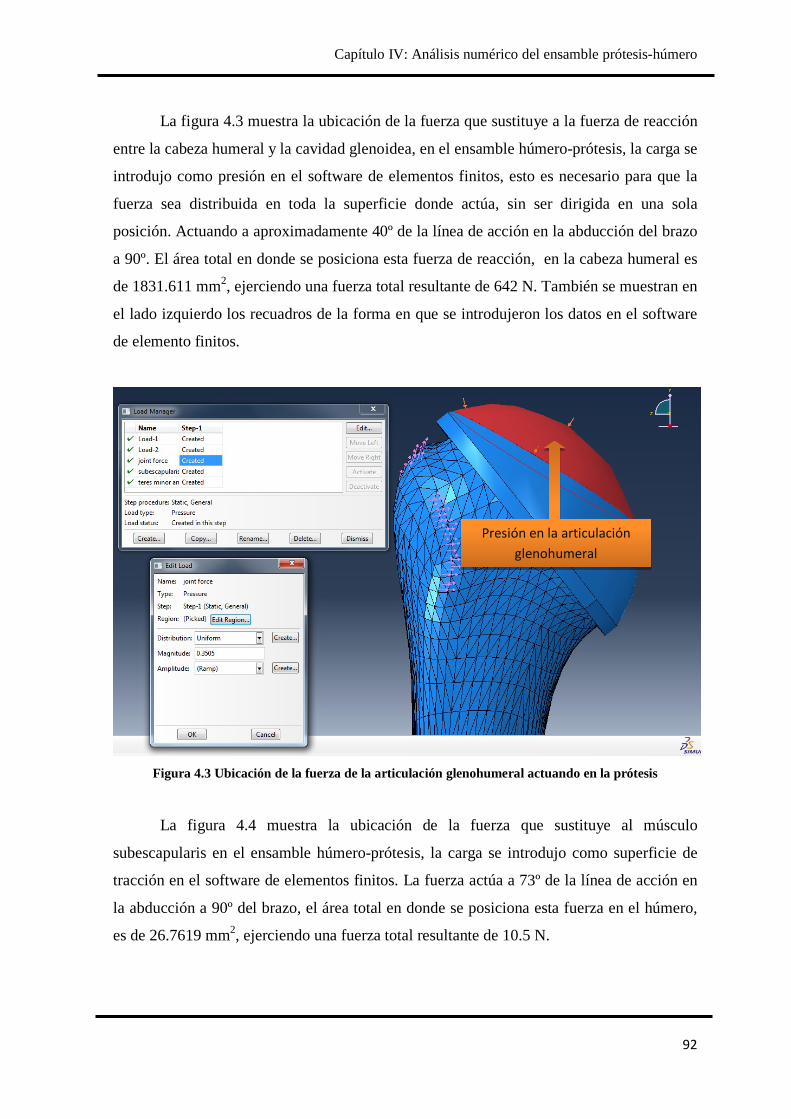
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
92
La figura 4.3 muestra la ubicación de la fuerza que sustituye a la fuerza de reacción
entre la cabeza humeral y la cavidad glenoidea, en el ensamble húmero-prótesis, la carga se
introdujo como presión en el software de elementos finitos, esto es necesario para que la
fuerza sea distribuida en toda la superficie donde actúa, sin ser dirigida en una sola
posición. Actuando a aproximadamente 40º de la línea de acción en la abducción del brazo
a 90º. El área total en donde se posiciona esta fuerza de reacción, en la cabeza humeral es
de 1831.611 mm2, ejerciendo una fuerza total resultante de 642 N. También se muestran en
el lado izquierdo los recuadros de la forma en que se introdujeron los datos en el software
de elemento finitos.
Figura 4.3 Ubicación de la fuerza de la articulación glenohumeral actuando en la prótesis
La figura 4.4 muestra la ubicación de la fuerza que sustituye al músculo
subescapularis en el ensamble húmero-prótesis, la carga se introdujo como superficie de
tracción en el software de elementos finitos. La fuerza actúa a 73º de la línea de acción en
la abducción a 90º del brazo, el área total en donde se posiciona esta fuerza en el húmero,
es de 26.7619 mm2, ejerciendo una fuerza total resultante de 10.5 N.
Presión en la articulación glenohumeral
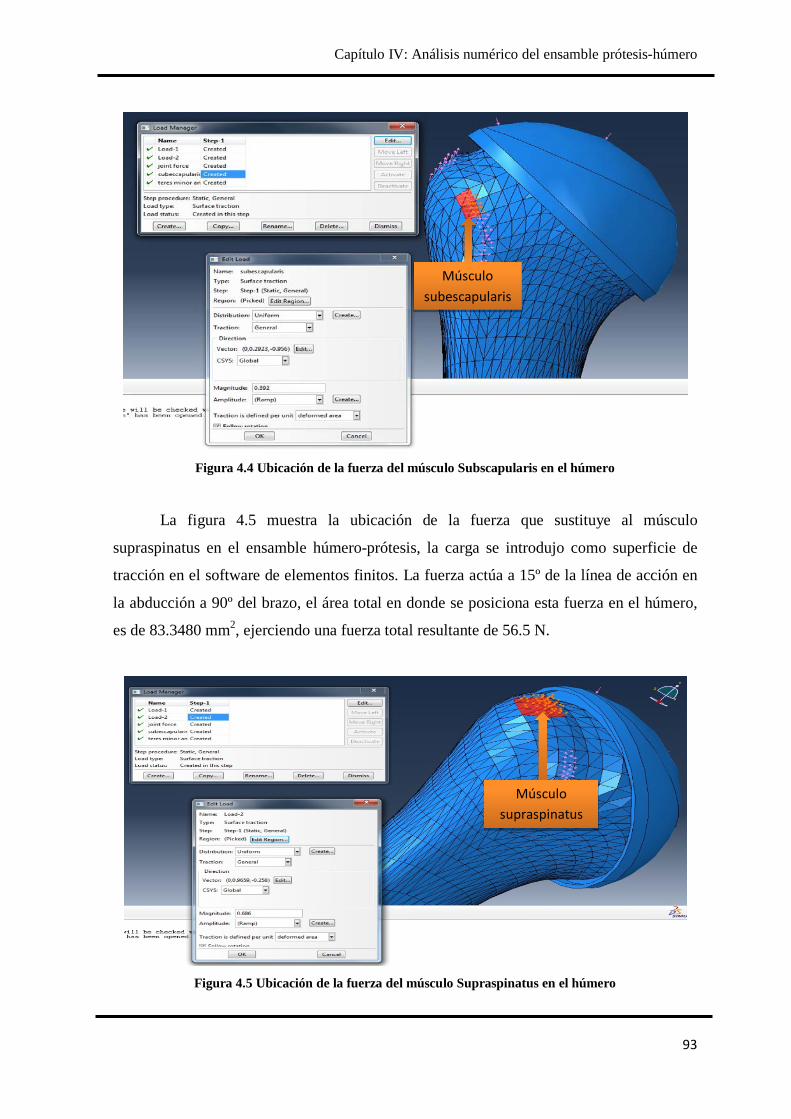
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
93
Figura 4.4 Ubicación de la fuerza del músculo Subscapularis en el húmero
La figura 4.5 muestra la ubicación de la fuerza que sustituye al músculo
supraspinatus en el ensamble húmero-prótesis, la carga se introdujo como superficie de
tracción en el software de elementos finitos. La fuerza actúa a 15º de la línea de acción en
la abducción a 90º del brazo, el área total en donde se posiciona esta fuerza en el húmero,
es de 83.3480 mm2, ejerciendo una fuerza total resultante de 56.5 N.
Figura 4.5 Ubicación de la fuerza del músculo Supraspinatus en el húmero
Músculo subescapularis
Músculo supraspinatus
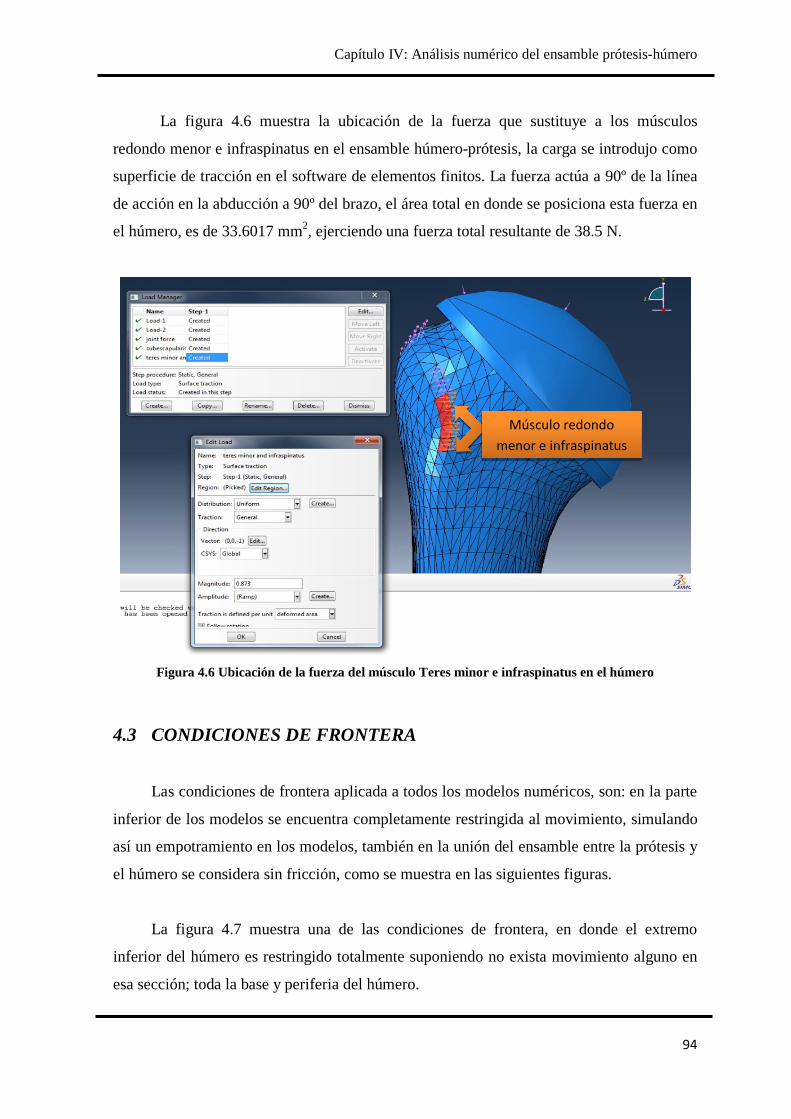
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
94
La figura 4.6 muestra la ubicación de la fuerza que sustituye a los músculos
redondo menor e infraspinatus en el ensamble húmero-prótesis, la carga se introdujo como
superficie de tracción en el software de elementos finitos. La fuerza actúa a 90º de la línea
de acción en la abducción a 90º del brazo, el área total en donde se posiciona esta fuerza en
el húmero, es de 33.6017 mm2, ejerciendo una fuerza total resultante de 38.5 N.
Figura 4.6 Ubicación de la fuerza del músculo Teres minor e infraspinatus en el húmero
4.3 CONDICIONES DE FRONTERA
Las condiciones de frontera aplicada a todos los modelos numéricos, son: en la parte
inferior de los modelos se encuentra completamente restringida al movimiento, simulando
así un empotramiento en los modelos, también en la unión del ensamble entre la prótesis y
el húmero se considera sin fricción, como se muestra en las siguientes figuras.
La figura 4.7 muestra una de las condiciones de frontera, en donde el extremo
inferior del húmero es restringido totalmente suponiendo no exista movimiento alguno en
esa sección; toda la base y periferia del húmero.
Músculo redondo menor e infraspinatus
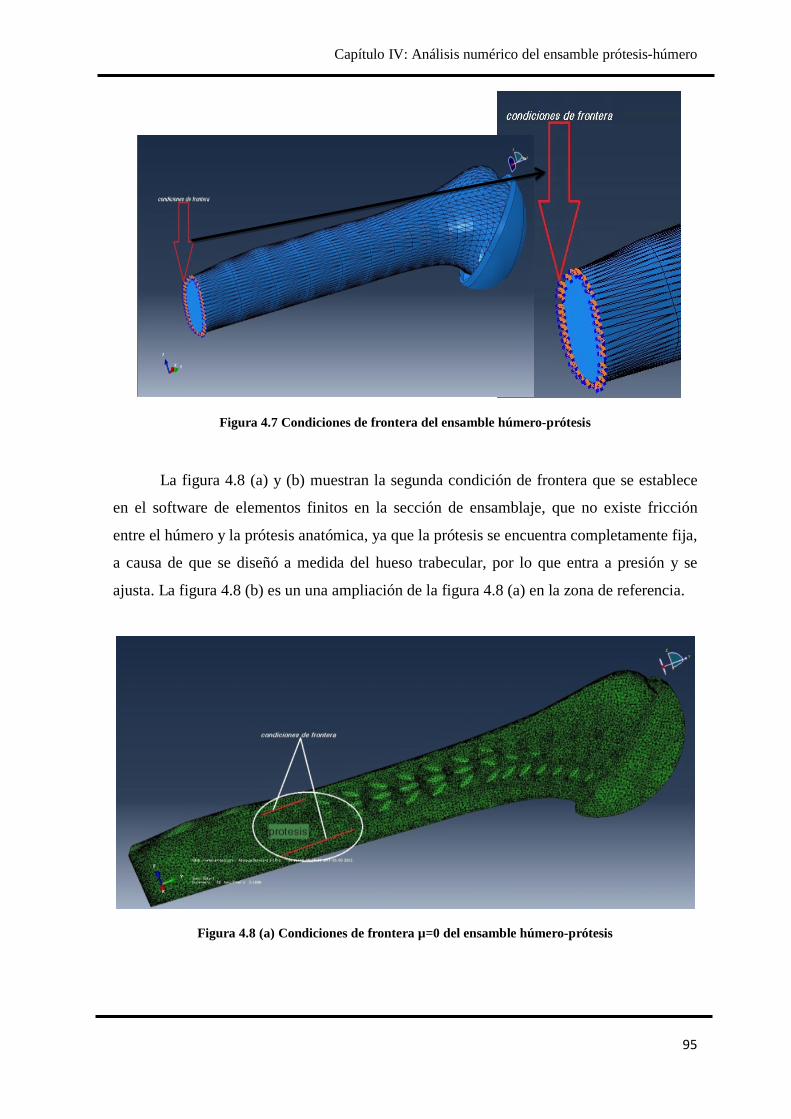
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
95
Figura 4.7 Condiciones de frontera del ensamble húmero-prótesis
La figura 4.8 (a) y (b) muestran la segunda condición de frontera que se establece
en el software de elementos finitos en la sección de ensamblaje, que no existe fricción
entre el húmero y la prótesis anatómica, ya que la prótesis se encuentra completamente fija,
a causa de que se diseñó a medida del hueso trabecular, por lo que entra a presión y se
ajusta. La figura 4.8 (b) es un una ampliación de la figura 4.8 (a) en la zona de referencia.
Figura 4.8 (a) Condiciones de frontera µ=0 del ensamble húmero-prótesis
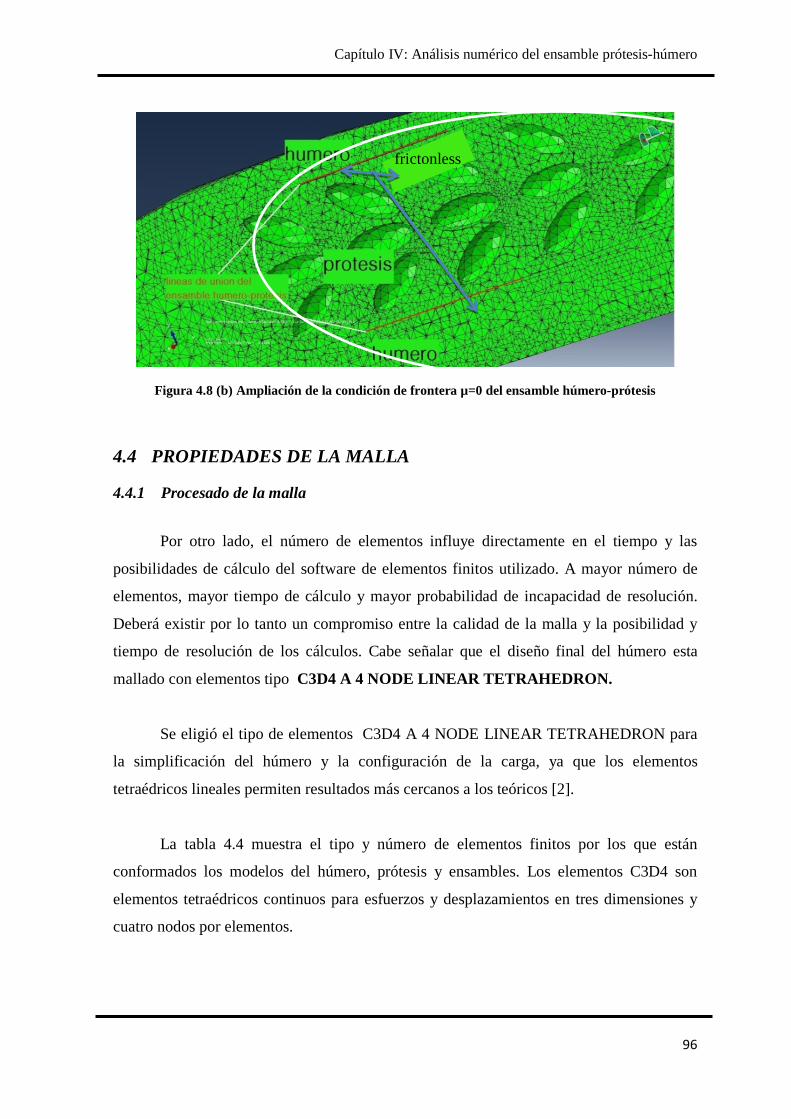
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
96
Figura 4.8 (b) Ampliación de la condición de frontera µ=0 del ensamble húmero-prótesis
4.4 PROPIEDADES DE LA MALLA
4.4.1 Procesado de la malla
Por otro lado, el número de elementos influye directamente en el tiempo y las
posibilidades de cálculo del software de elementos finitos utilizado. A mayor número de
elementos, mayor tiempo de cálculo y mayor probabilidad de incapacidad de resolución.
Deberá existir por lo tanto un compromiso entre la calidad de la malla y la posibilidad y
tiempo de resolución de los cálculos. Cabe señalar que el diseño final del húmero esta
mallado con elementos tipo C3D4 A 4 NODE LINEAR TETRAHEDRON.
Se eligió el tipo de elementos C3D4 A 4 NODE LINEAR TETRAHEDRON para
la simplificación del húmero y la configuración de la carga, ya que los elementos
tetraédricos lineales permiten resultados más cercanos a los teóricos [2].
La tabla 4.4 muestra el tipo y número de elementos finitos por los que están
conformados los modelos del húmero, prótesis y ensambles. Los elementos C3D4 son
elementos tetraédricos continuos para esfuerzos y desplazamientos en tres dimensiones y
cuatro nodos por elementos.
frictonless
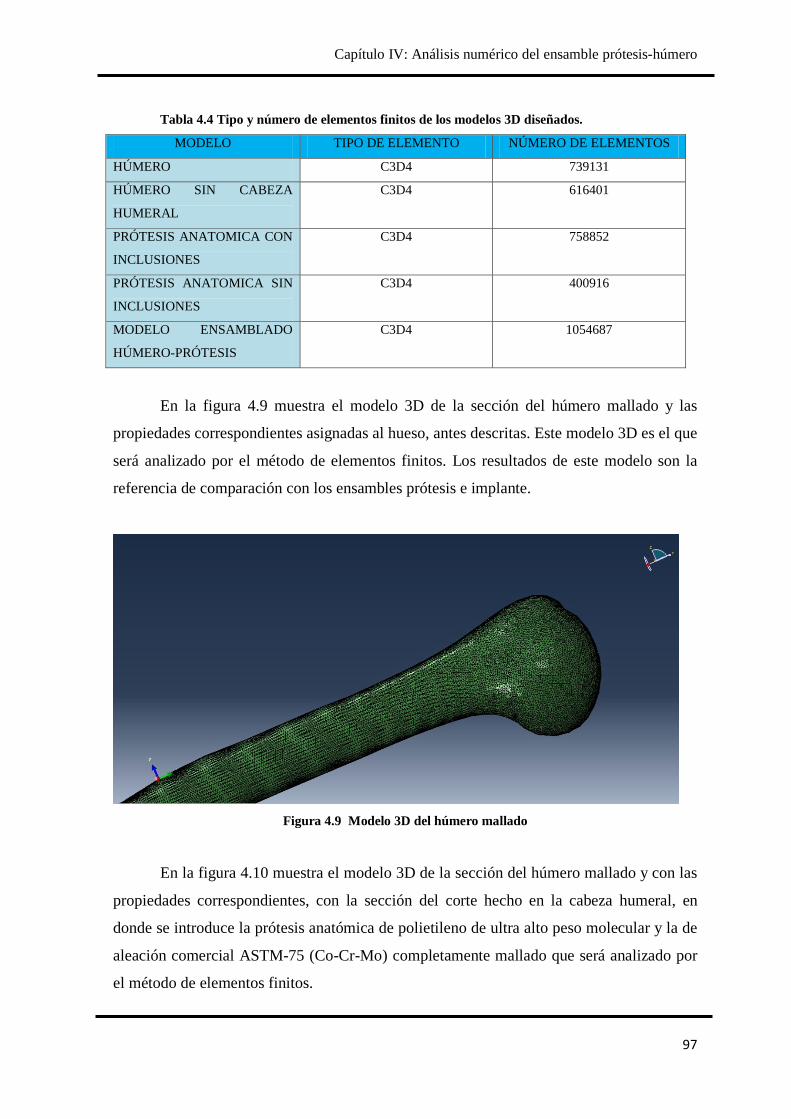
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
97
Tabla 4.4 Tipo y número de elementos finitos de los modelos 3D diseñados.
MODELO TIPO DE ELEMENTO NÚMERO DE ELEMENTOS
HÚMERO C3D4 739131
HÚMERO SIN CABEZA
HUMERAL
C3D4 616401
PRÓTESIS ANATOMICA CON
INCLUSIONES
C3D4 758852
PRÓTESIS ANATOMICA SIN
INCLUSIONES
C3D4 400916
MODELO ENSAMBLADO
HÚMERO-PRÓTESIS
C3D4 1054687
En la figura 4.9 muestra el modelo 3D de la sección del húmero mallado y las
propiedades correspondientes asignadas al hueso, antes descritas. Este modelo 3D es el que
será analizado por el método de elementos finitos. Los resultados de este modelo son la
referencia de comparación con los ensambles prótesis e implante.
Figura 4.9 Modelo 3D del húmero mallado
En la figura 4.10 muestra el modelo 3D de la sección del húmero mallado y con las
propiedades correspondientes, con la sección del corte hecho en la cabeza humeral, en
donde se introduce la prótesis anatómica de polietileno de ultra alto peso molecular y la de
aleación comercial ASTM-75 (Co-Cr-Mo) completamente mallado que será analizado por
el método de elementos finitos.
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
98
Figura 4.10 Mallado del modelo 3D del húmero sin la sección de la cabeza humeral dañada
En la figura 4.11 muestra el modelo 3D completamente mallado de la prótesis
anatómica diseñada a la medida correspondiente para el paciente al que se le realizó el
estudio tomográfico. Esta prótesis será la analizada por el método de elementos finitos y
con este modelo se realiza el ensamblado con el modelo 3D del húmero.
Figura 4.11 Mallado del modelo 3D de la prótesis anatómica
En la figura 4.12 muestra el modelo 3D del ensamble húmero-prótesis
completamente mallado. Este es el modelo final que es analizado por el método de
elementos finitos.
Figura 4.12 Mallado del ensamble Húmero-Prótesis
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
99
4.5 ANÁLISIS NUMÉRICO
Una vez asignadas las propiedades mecánicas al hueso y a la prótesis de polietileno
de ultra alto peso molecular, también las fuerzas resultantes por los músculos cuando el
brazo actúa en abducción a 90º y el mallado halla sido realizado, con las condiciones de
frontera descritas anteriormente, el modelo de elemento finito esta listo para ser resuelto.
Se realizaron los siguientes casos de estudios por el método de elemento finito: el
húmero como hueso, prótesis sin inclusiones de UHMWP, prótesis con inclusiones de
UHMWP, prótesis de aleación comercial de Co-Cr-Mo, ensamble con inclusiones prótesis-
húmero, ensamble sin inclusiones prótesis-húmero.
4.5.1 Húmero En la figura 4.13 se muestra el análisis numérico anisotrópico del húmero en
abducción a 90º. La mayor concentración de esfuerzos se encuentra en la parte media de la
diáfisis, en la zona del hueso cortical, con una magnitud de esfuerzo máximo de Von Mises
de 8.800 MPa y un esfuerzo mínimo de 1.106 x 10-02 MPa. En la imagen ampliada en la
sección de la diáfisis, se muestra un corte transversal para observar el comportamiento de
los esfuerzos que se distribuyen de forma desordenada hacia el interior del húmero en la
parte del hueso trabecular. Esto se debe principalmente a la anisotropía del hueso, los
esfuerzos se distribuyen de acuerdo a la dirección que forman las trabéculas del húmero.
Figura 4.13 Análisis numérico anisotrópico del húmero
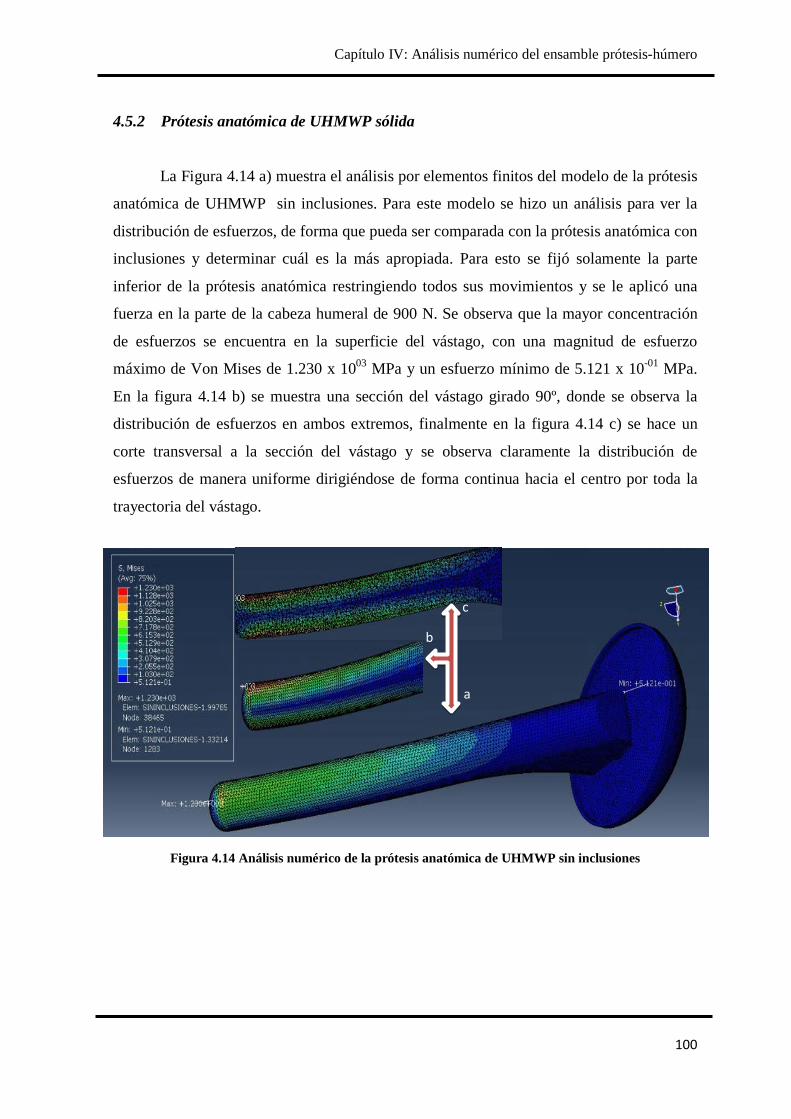
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
100
4.5.2 Prótesis anatómica de UHMWP sólida
La Figura 4.14 a) muestra el análisis por elementos finitos del modelo de la prótesis
anatómica de UHMWP sin inclusiones. Para este modelo se hizo un análisis para ver la
distribución de esfuerzos, de forma que pueda ser comparada con la prótesis anatómica con
inclusiones y determinar cuál es la más apropiada. Para esto se fijó solamente la parte
inferior de la prótesis anatómica restringiendo todos sus movimientos y se le aplicó una
fuerza en la parte de la cabeza humeral de 900 N. Se observa que la mayor concentración
de esfuerzos se encuentra en la superficie del vástago, con una magnitud de esfuerzo
máximo de Von Mises de 1.230 x 1003 MPa y un esfuerzo mínimo de 5.121 x 10-01 MPa.
En la figura 4.14 b) se muestra una sección del vástago girado 90º, donde se observa la
distribución de esfuerzos en ambos extremos, finalmente en la figura 4.14 c) se hace un
corte transversal a la sección del vástago y se observa claramente la distribución de
esfuerzos de manera uniforme dirigiéndose de forma continua hacia el centro por toda la
trayectoria del vástago.
Figura 4.14 Análisis numérico de la prótesis anatómica de UHMWP sin inclusiones
a
b
c
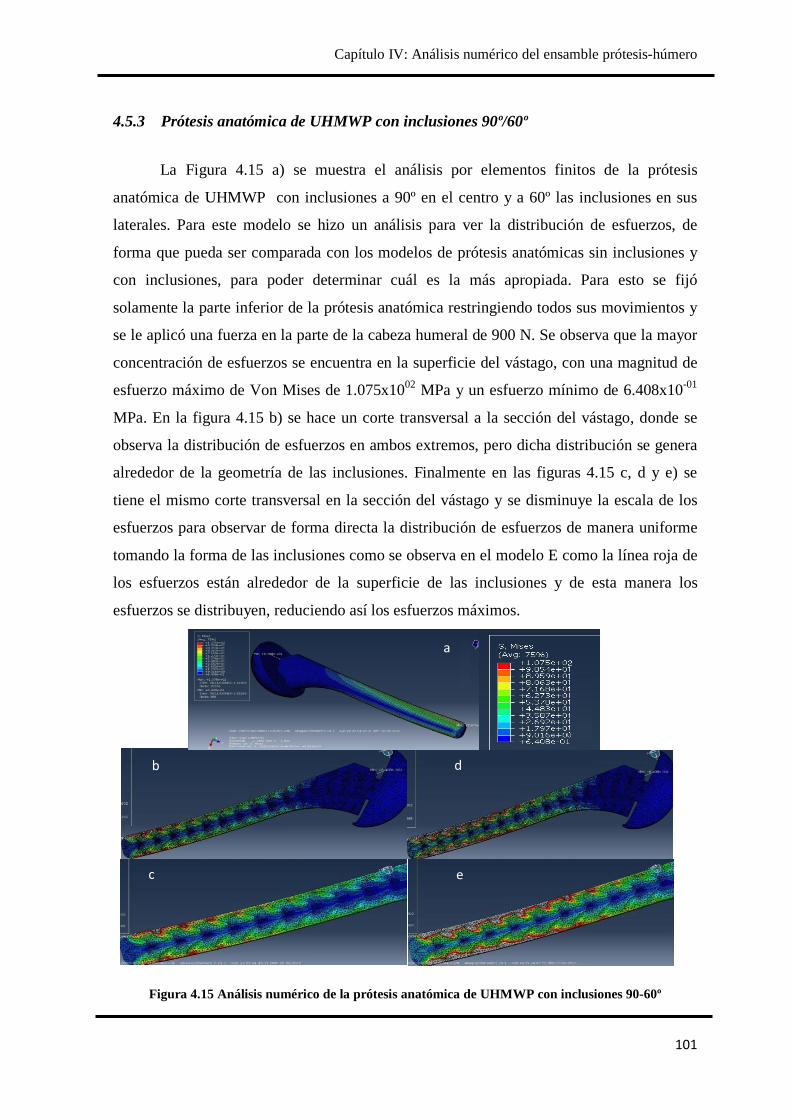
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
101
4.5.3 Prótesis anatómica de UHMWP con inclusiones 90º/60º
La Figura 4.15 a) se muestra el análisis por elementos finitos de la prótesis
anatómica de UHMWP con inclusiones a 90º en el centro y a 60º las inclusiones en sus
laterales. Para este modelo se hizo un análisis para ver la distribución de esfuerzos, de
forma que pueda ser comparada con los modelos de prótesis anatómicas sin inclusiones y
con inclusiones, para poder determinar cuál es la más apropiada. Para esto se fijó
solamente la parte inferior de la prótesis anatómica restringiendo todos sus movimientos y
se le aplicó una fuerza en la parte de la cabeza humeral de 900 N. Se observa que la mayor
concentración de esfuerzos se encuentra en la superficie del vástago, con una magnitud de
esfuerzo máximo de Von Mises de 1.075x1002 MPa y un esfuerzo mínimo de 6.408x10-01
MPa. En la figura 4.15 b) se hace un corte transversal a la sección del vástago, donde se
observa la distribución de esfuerzos en ambos extremos, pero dicha distribución se genera
alrededor de la geometría de las inclusiones. Finalmente en las figuras 4.15 c, d y e) se
tiene el mismo corte transversal en la sección del vástago y se disminuye la escala de los
esfuerzos para observar de forma directa la distribución de esfuerzos de manera uniforme
tomando la forma de las inclusiones como se observa en el modelo E como la línea roja de
los esfuerzos están alrededor de la superficie de las inclusiones y de esta manera los
esfuerzos se distribuyen, reduciendo así los esfuerzos máximos.
Figura 4.15 Análisis numérico de la prótesis anatómica de UHMWP con inclusiones 90-60º
a
d b
e c
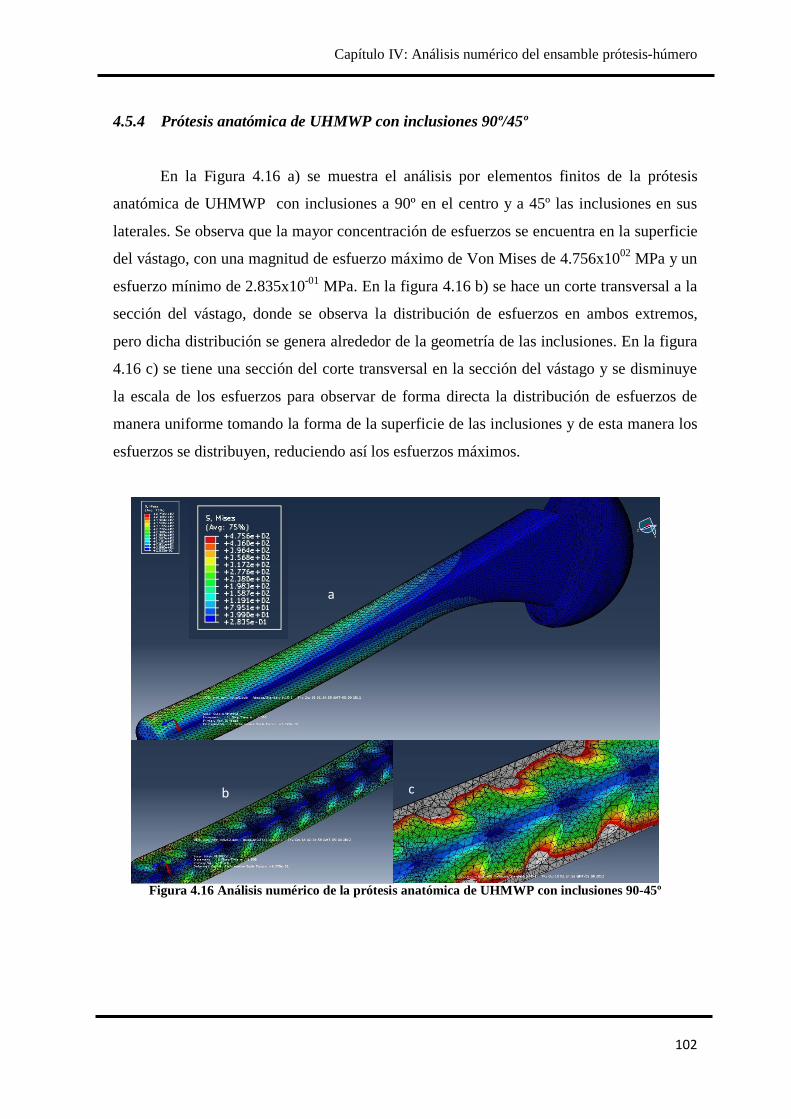
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
102
4.5.4 Prótesis anatómica de UHMWP con inclusiones 90º/45º
En la Figura 4.16 a) se muestra el análisis por elementos finitos de la prótesis
anatómica de UHMWP con inclusiones a 90º en el centro y a 45º las inclusiones en sus
laterales. Se observa que la mayor concentración de esfuerzos se encuentra en la superficie
del vástago, con una magnitud de esfuerzo máximo de Von Mises de 4.756x1002 MPa y un
esfuerzo mínimo de 2.835x10-01 MPa. En la figura 4.16 b) se hace un corte transversal a la
sección del vástago, donde se observa la distribución de esfuerzos en ambos extremos,
pero dicha distribución se genera alrededor de la geometría de las inclusiones. En la figura
4.16 c) se tiene una sección del corte transversal en la sección del vástago y se disminuye
la escala de los esfuerzos para observar de forma directa la distribución de esfuerzos de
manera uniforme tomando la forma de la superficie de las inclusiones y de esta manera los
esfuerzos se distribuyen, reduciendo así los esfuerzos máximos.
Figura 4.16 Análisis numérico de la prótesis anatómica de UHMWP con inclusiones 90-45º
a
b c
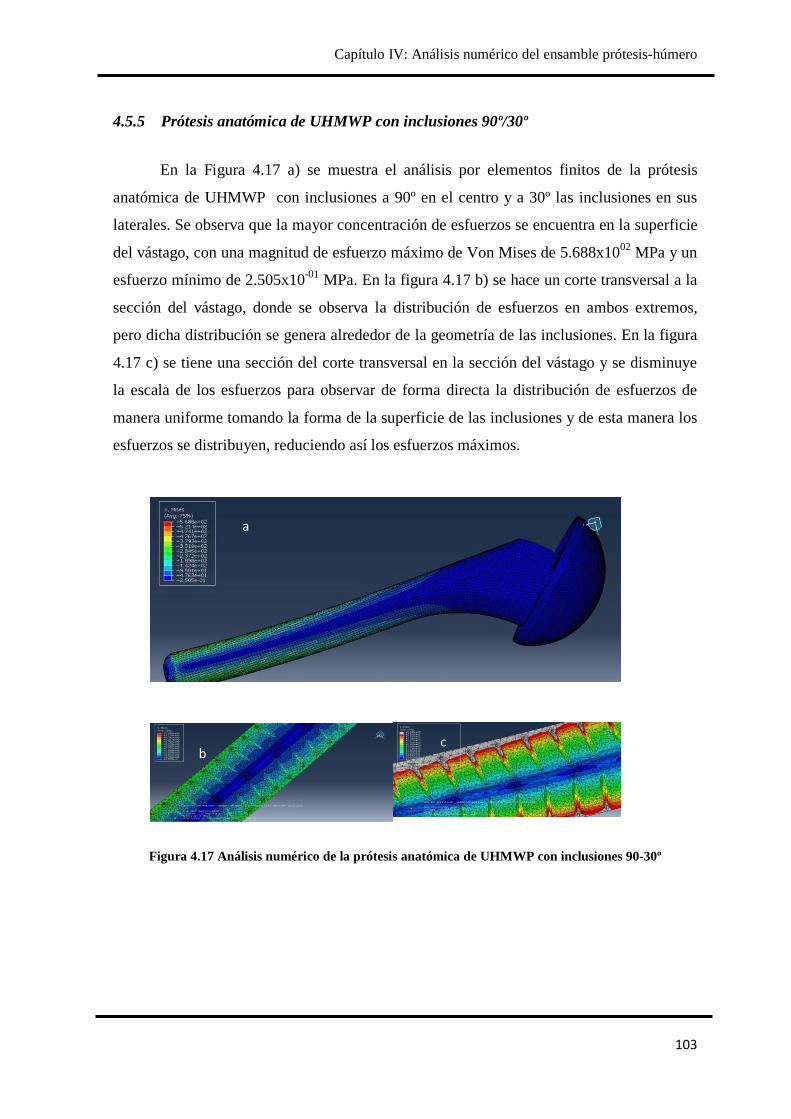
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
103
4.5.5 Prótesis anatómica de UHMWP con inclusiones 90º/30º
En la Figura 4.17 a) se muestra el análisis por elementos finitos de la prótesis
anatómica de UHMWP con inclusiones a 90º en el centro y a 30º las inclusiones en sus
laterales. Se observa que la mayor concentración de esfuerzos se encuentra en la superficie
del vástago, con una magnitud de esfuerzo máximo de Von Mises de 5.688x1002 MPa y un
esfuerzo mínimo de 2.505x10-01 MPa. En la figura 4.17 b) se hace un corte transversal a la
sección del vástago, donde se observa la distribución de esfuerzos en ambos extremos,
pero dicha distribución se genera alrededor de la geometría de las inclusiones. En la figura
4.17 c) se tiene una sección del corte transversal en la sección del vástago y se disminuye
la escala de los esfuerzos para observar de forma directa la distribución de esfuerzos de
manera uniforme tomando la forma de la superficie de las inclusiones y de esta manera los
esfuerzos se distribuyen, reduciendo así los esfuerzos máximos.
Figura 4.17 Análisis numérico de la prótesis anatómica de UHMWP con inclusiones 90-30º
a
b c
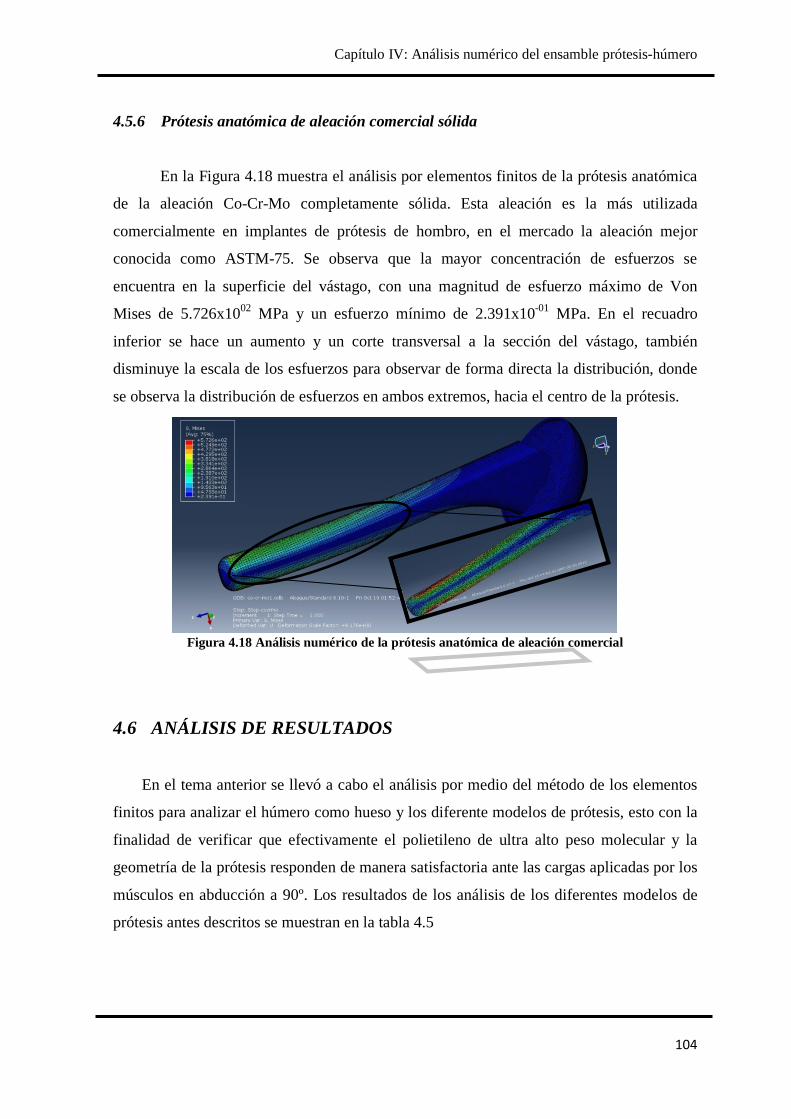
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
104
4.5.6 Prótesis anatómica de aleación comercial sólida
En la Figura 4.18 muestra el análisis por elementos finitos de la prótesis anatómica
de la aleación Co-Cr-Mo completamente sólida. Esta aleación es la más utilizada
comercialmente en implantes de prótesis de hombro, en el mercado la aleación mejor
conocida como ASTM-75. Se observa que la mayor concentración de esfuerzos se
encuentra en la superficie del vástago, con una magnitud de esfuerzo máximo de Von
Mises de 5.726x1002 MPa y un esfuerzo mínimo de 2.391x10-01 MPa. En el recuadro
inferior se hace un aumento y un corte transversal a la sección del vástago, también
disminuye la escala de los esfuerzos para observar de forma directa la distribución, donde
se observa la distribución de esfuerzos en ambos extremos, hacia el centro de la prótesis.
Figura 4.18 Análisis numérico de la prótesis anatómica de aleación comercial
4.6 ANÁLISIS DE RESULTADOS
En el tema anterior se llevó a cabo el análisis por medio del método de los elementos
finitos para analizar el húmero como hueso y los diferente modelos de prótesis, esto con la
finalidad de verificar que efectivamente el polietileno de ultra alto peso molecular y la
geometría de la prótesis responden de manera satisfactoria ante las cargas aplicadas por los
músculos en abducción a 90º. Los resultados de los análisis de los diferentes modelos de
prótesis antes descritos se muestran en la tabla 4.5
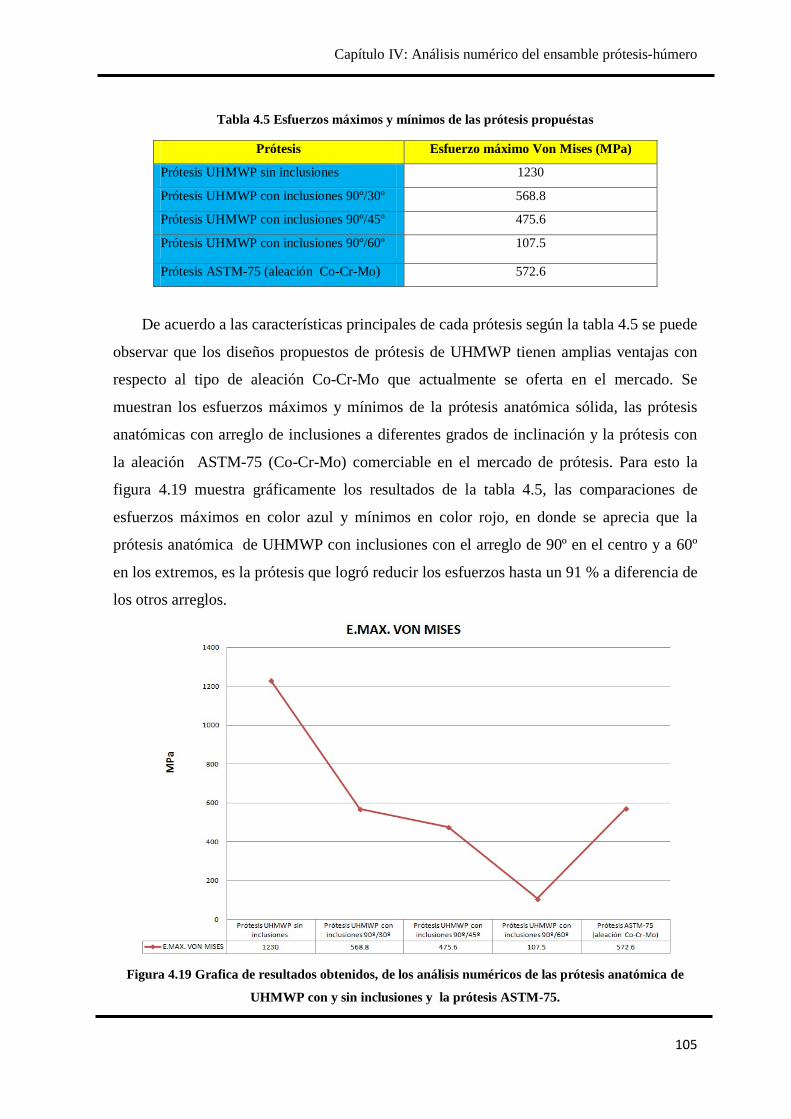
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
105
Tabla 4.5 Esfuerzos máximos y mínimos de las prótesis propuéstas
Prótesis Esfuerzo máximo Von Mises (MPa)
Prótesis UHMWP sin inclusiones 1230
Prótesis UHMWP con inclusiones 90º/30º 568.8
Prótesis UHMWP con inclusiones 90º/45º 475.6
Prótesis UHMWP con inclusiones 90º/60º 107.5
Prótesis ASTM-75 (aleación Co-Cr-Mo) 572.6
De acuerdo a las características principales de cada prótesis según la tabla 4.5 se puede
observar que los diseños propuestos de prótesis de UHMWP tienen amplias ventajas con
respecto al tipo de aleación Co-Cr-Mo que actualmente se oferta en el mercado. Se
muestran los esfuerzos máximos y mínimos de la prótesis anatómica sólida, las prótesis
anatómicas con arreglo de inclusiones a diferentes grados de inclinación y la prótesis con
la aleación ASTM-75 (Co-Cr-Mo) comerciable en el mercado de prótesis. Para esto la
figura 4.19 muestra gráficamente los resultados de la tabla 4.5, las comparaciones de
esfuerzos máximos en color azul y mínimos en color rojo, en donde se aprecia que la
prótesis anatómica de UHMWP con inclusiones con el arreglo de 90º en el centro y a 60º
en los extremos, es la prótesis que logró reducir los esfuerzos hasta un 91 % a diferencia de
los otros arreglos.
Figura 4.19 Grafica de resultados obtenidos, de los análisis numéricos de las prótesis anatómica de
UHMWP con y sin inclusiones y la prótesis ASTM-75.
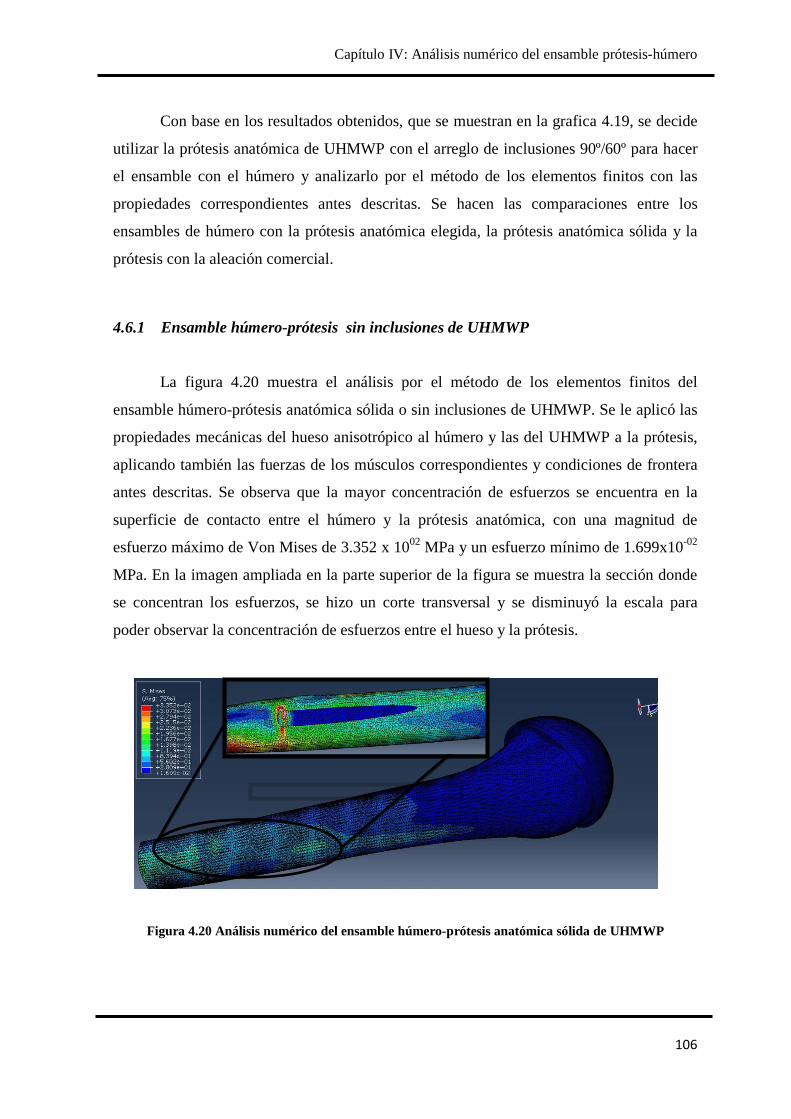
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
106
Con base en los resultados obtenidos, que se muestran en la grafica 4.19, se decide
utilizar la prótesis anatómica de UHMWP con el arreglo de inclusiones 90º/60º para hacer
el ensamble con el húmero y analizarlo por el método de los elementos finitos con las
propiedades correspondientes antes descritas. Se hacen las comparaciones entre los
ensambles de húmero con la prótesis anatómica elegida, la prótesis anatómica sólida y la
prótesis con la aleación comercial.
4.6.1 Ensamble húmero-prótesis sin inclusiones de UHMWP
La figura 4.20 muestra el análisis por el método de los elementos finitos del
ensamble húmero-prótesis anatómica sólida o sin inclusiones de UHMWP. Se le aplicó las
propiedades mecánicas del hueso anisotrópico al húmero y las del UHMWP a la prótesis,
aplicando también las fuerzas de los músculos correspondientes y condiciones de frontera
antes descritas. Se observa que la mayor concentración de esfuerzos se encuentra en la
superficie de contacto entre el húmero y la prótesis anatómica, con una magnitud de
esfuerzo máximo de Von Mises de 3.352 x 1002 MPa y un esfuerzo mínimo de 1.699x10-02
MPa. En la imagen ampliada en la parte superior de la figura se muestra la sección donde
se concentran los esfuerzos, se hizo un corte transversal y se disminuyó la escala para
poder observar la concentración de esfuerzos entre el hueso y la prótesis.
Figura 4.20 Análisis numérico del ensamble húmero-prótesis anatómica sólida de UHMWP

Capítulo IV: Análisis numérico del ensamble prótesis-húmero
107
4.6.2 Ensamble húmero-prótesis con inclusiones de UHMWP
La figura 4.21 muestra el análisis por el método de los elementos finitos del
ensamble húmero-prótesis anatómica con inclusiones de UHMWP. Se la aplicó las
propiedades mecánicas del hueso anisotrópico al húmero y las del UHMWP a la prótesis,
aplicando también las fuerzas de los músculos correspondientes y condiciones de frontera
antes descritas. Se observa que la mayor concentración de esfuerzos se encuentra en la
superficie del húmero, con una magnitud de esfuerzo máximo de Von Mises de 6.820 x
1001 MPa y un esfuerzo mínimo de 2.738 x 10-02 MPa. En la figura 4.22 se hizo un corte
transversal y se disminuyó la escala para poder observar la concentración de esfuerzos en
las inclusiones, se observa que las inclusiones hacen que los esfuerzos se distribuyan
alrededor de éstas.
Figura 4.21 Análisis numérico del ensamble húmero-prótesis anatómica con inclusiones de UHMWP
Figura 4.22 corte transversal y escala baja de esfuerzos del análisis numérico del ensamble húmero-
prótesis anatómica con inclusiones de UHMWP
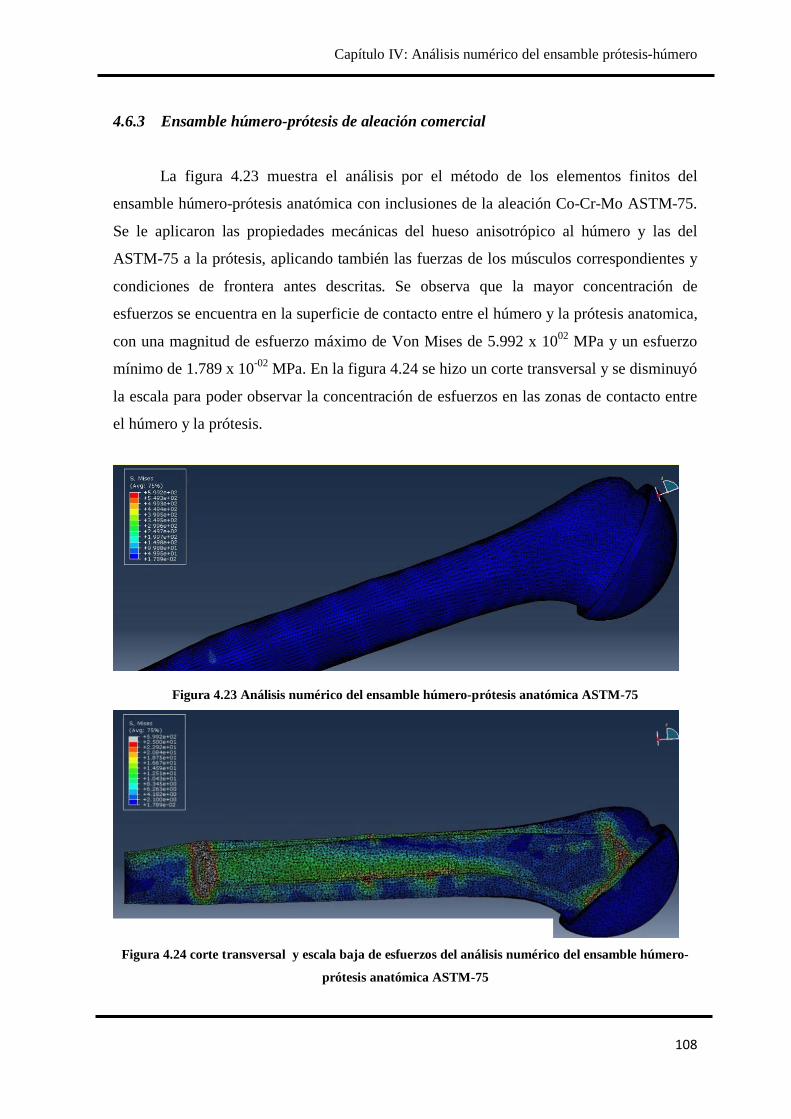
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
108
4.6.3 Ensamble húmero-prótesis de aleación comercial
La figura 4.23 muestra el análisis por el método de los elementos finitos del
ensamble húmero-prótesis anatómica con inclusiones de la aleación Co-Cr-Mo ASTM-75.
Se le aplicaron las propiedades mecánicas del hueso anisotrópico al húmero y las del
ASTM-75 a la prótesis, aplicando también las fuerzas de los músculos correspondientes y
condiciones de frontera antes descritas. Se observa que la mayor concentración de
esfuerzos se encuentra en la superficie de contacto entre el húmero y la prótesis anatomica,
con una magnitud de esfuerzo máximo de Von Mises de 5.992 x 1002 MPa y un esfuerzo
mínimo de 1.789 x 10-02 MPa. En la figura 4.24 se hizo un corte transversal y se disminuyó
la escala para poder observar la concentración de esfuerzos en las zonas de contacto entre
el húmero y la prótesis.
Figura 4.23 Análisis numérico del ensamble húmero-prótesis anatómica ASTM-75
Figura 4.24 corte transversal y escala baja de esfuerzos del análisis numérico del ensamble húmero-
prótesis anatómica ASTM-75
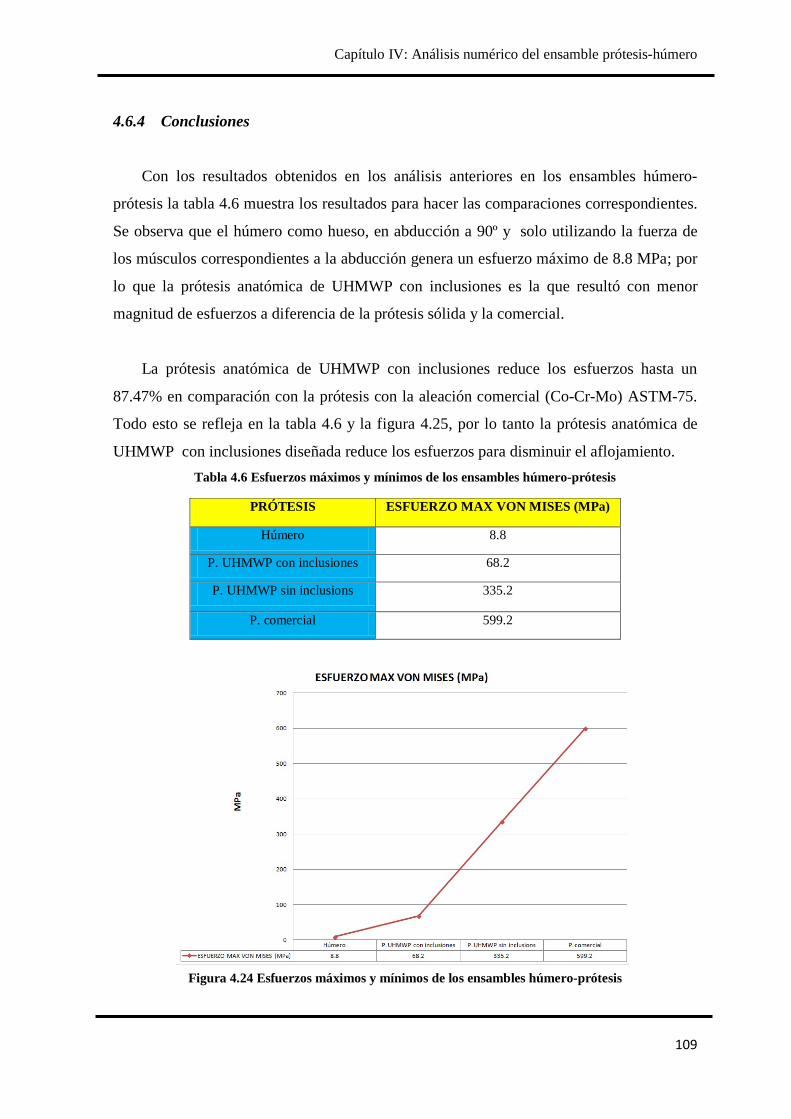
Capítulo IV: Análisis numérico del ensamble prótesis-húmero
109
4.6.4 Conclusiones
Con los resultados obtenidos en los análisis anteriores en los ensambles húmero-
prótesis la tabla 4.6 muestra los resultados para hacer las comparaciones correspondientes.
Se observa que el húmero como hueso, en abducción a 90º y solo utilizando la fuerza de
los músculos correspondientes a la abducción genera un esfuerzo máximo de 8.8 MPa; por
lo que la prótesis anatómica de UHMWP con inclusiones es la que resultó con menor
magnitud de esfuerzos a diferencia de la prótesis sólida y la comercial.
La prótesis anatómica de UHMWP con inclusiones reduce los esfuerzos hasta un
87.47% en comparación con la prótesis con la aleación comercial (Co-Cr-Mo) ASTM-75.
Todo esto se refleja en la tabla 4.6 y la figura 4.25, por lo tanto la prótesis anatómica de
UHMWP con inclusiones diseñada reduce los esfuerzos para disminuir el aflojamiento. Tabla 4.6 Esfuerzos máximos y mínimos de los ensambles húmero-prótesis
PRÓTESIS ESFUERZO MAX VON MISES (MPa)
Húmero 8.8
P. UHMWP con inclusiones 68.2
P. UHMWP sin inclusions 335.2
P. comercial 599.2
Figura 4.24 Esfuerzos máximos y mínimos de los ensambles húmero-prótesis
Bibliografía
110
4.7 BIBLIOGRAFÍA
[1] F. Lam,_, D.N. Bhatiaa, S.B. Mostofib, K. van Rooyena, J.F. de Beera, 2007.
Biomechanical considerations of the normal and rotator cuff deficient shoulders and the
reverse shoulder prosthesis
[2] Ramos A., Simoes J.A. Tetrahedral versus hexahedral finite elements in numerical
modelling of the proximal femur. Departamento de Engenharia Mecanica, Universidade de
Aveiro, 3810-193 Aveiro, Portugal.
Capítulo V: Conclusiones y trabajos futuros
111
Capítulo 5
Conclusiones y trabajos futuros
5.1 CONCLUSIONES
En el presente trabajo se diseñó una prótesis de hombro anatómica de polietileno de ultra
alto peso molecular con inclusiones, para reducir los esfuerzos en el ensamble húmero-
prótesis. Los resultados arrojaron resultados satisfactorios que se muestran a continuación:
• Se realizó una metodología del modelado 3D del húmero humano, por medio de
tomografías computarizadas, mediante un visor de procesado de imágenes médicas,
obteniendo así el modelo virtual. Este método resulta satisfactorio para simular
diferentes piezas óseas del cuerpo humano.
Capítulo V: Conclusiones y trabajos futuros
112
• Se realizó un diseñó virtual de una prótesis de hombro anatómica sólida y otra con
inclusiones, de a cuerdo con la anatomía y requerimientos del húmero humano que
este dañado o necesite de una prótesis.
• Se realizó un estudio por el método de elementos finitos al modelo 3D del húmero y
de las prótesis diseñadas. De los diferentes arreglos de inclusiones que se diseñaron
la prótesis anatómica de UHMWP con inclusiones con el arreglo de 90º en el centro
y a 60º en los extremos, esta prótesis logró reducir los esfuerzos hasta un 91 % a
diferencia de los otros arreglos respecto a la prótesis de UHMWP sólida y de
aleación comercial ASTM-75.
• Se observa que los diseños propuestos de prótesis de UHMWP tienen amplias
ventajas con respecto al tipo de aleación Co-Cr-Mo que actualmente se oferta en el
mercado como: mayor compatibilidad con la estructura ósea, pérdida en masa hasta
un 80%, disminución de esfuerzos en la prótesis anatómica de UHMWP con
inclusiones, ya que reduce los esfuerzos hasta un 87.47% en comparación con la
prótesis con la aleación comercial (Co-Cr-Mo) ASTM-75
• En la prótesis de aleación comercial y la prótesis de polietileno de ultra alto peso
molecular sin inclusiones los esfuerzos máximos se concentran en el mismo nodo, a
diferencia de la prótesis de polietileno de ultra alto peso molecular con inclusiones
que el esfuerzo máximo se concentra en la sección del hueso cortical lo que ocasiona
que los esfuerzos se reduzcan y la prótesis diseñada no ocasione algún daño en el
hueso. Los nodos en donde se concentran los esfuerzos máximos se presentan en el
apéndice B.
• La prótesis de polietileno de ultra alto peso molecular económicamente hablando
resulta ser accesible para la población en general. La prótesis comercial ASTM-75
tiene un precio alrededor de los 15,000 dólares en Estados Unidos, a diferencia de la
prótesis de UHMWP diseñada en esta investigación que tendría un costo alrededor
de 1,500 y 3,000 pesos mexicanos
Capítulo V: Conclusiones y trabajos futuros
113
5.2 TRABAJOS FUTUROS
• Realizar el modelado de la escápula por el método de tomografías computarizadas y
modelar en conjunto con el modelo 3D del húmero humano obtenido.
• Analizar por el método de elementos finitos el modelo escápula-húmero para obtener
resultados de esfuerzos a diferentes rangos de movimiento del brazo, para así evaluar
el fenómeno de contacto que existe entre la cabeza humeral y la cavidad glenoidea.
• Realizar un análisis de esfuerzos, de forma experimental con la prótesis anatómica
de polietileno de ultra alto peso molecular con inclusiones diseñada.
• Realizar el proceso de recubrimiento por triboadhesión al modelo de la prótesis de
polietileno de ultra alto peso molecular con inclusiones y comparar resultados.
• Construir un equipo mecánico para realizar un análisis experimental del ciclo de vida
de la prótesis anatómica de polietileno de ultra alto peso molecular con inclusiones.
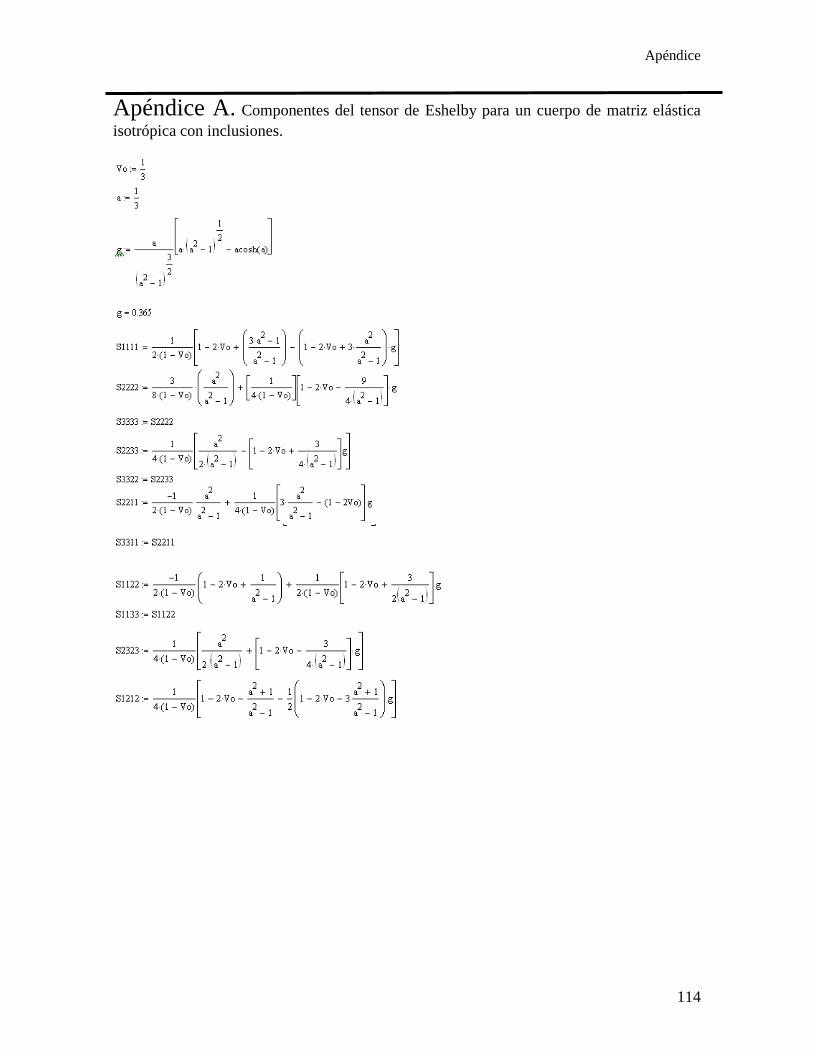
Apéndice
114
Apéndice A. Componentes del tensor de Eshelby para un cuerpo de matriz elástica isotrópica con inclusiones.
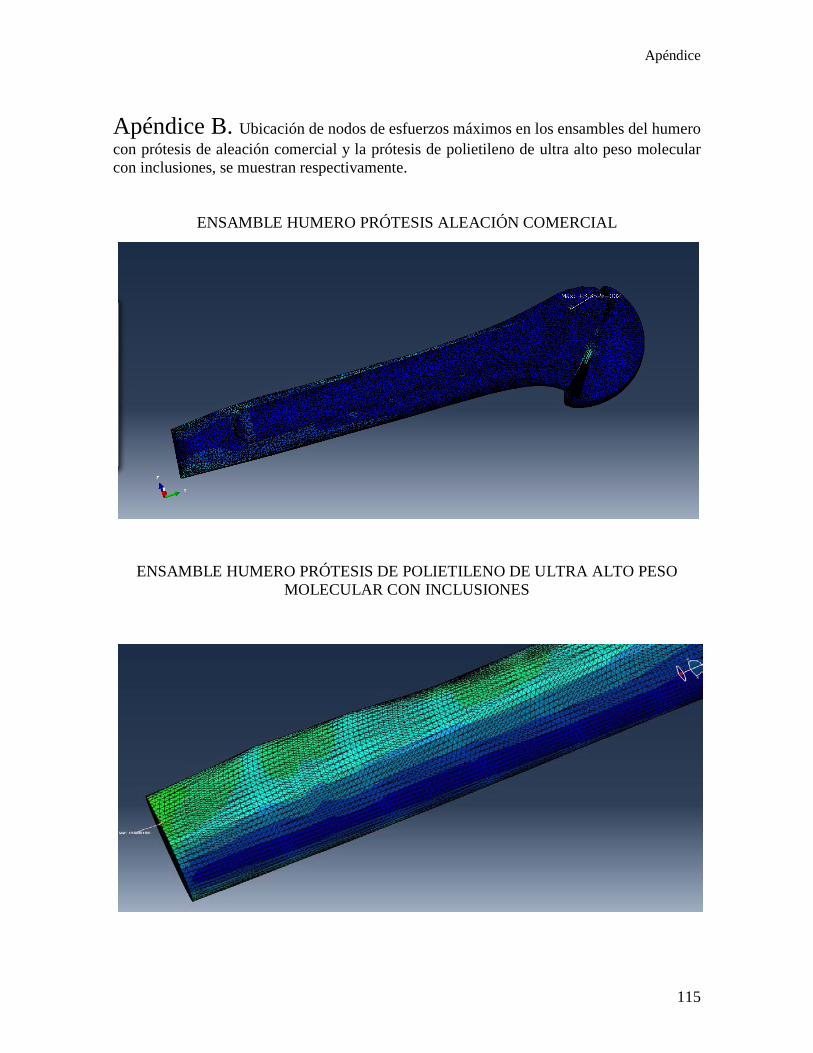
Apéndice
115
Apéndice B. Ubicación de nodos de esfuerzos máximos en los ensambles del humero con prótesis de aleación comercial y la prótesis de polietileno de ultra alto peso molecular con inclusiones, se muestran respectivamente.
ENSAMBLE HUMERO PRÓTESIS ALEACIÓN COMERCIAL
ENSAMBLE HUMERO PRÓTESIS DE POLIETILENO DE ULTRA ALTO PESO MOLECULAR CON INCLUSIONES


















