Tercera Practica

of 7
-
Upload
alexis-aleshito -
Category
Documents
-
view
227 -
download
0
description
3era pc ing control
Transcript of Tercera Practica
UNIVERSIDAD NACIONAL DE INGENIERIA
FACULTAD DE INGENIERIA MECANICA
CUARTA PRACTICA CALIFICADACURSO: INGENIERIA DE CONTROL
SECCION:A
PROFESOR:Ing. SOTELO
Santilln Ynac, Junnior Stevens 20101239C
LIMA - PER2014
Sea la planta:
Modelando el sistema mecnico:
G(S)=
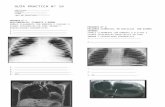
Hallando la respuesta al tiempo para una entrada escaln con ayuda del matlab:Cdigo:close all syms t y1 e a1 b y2 a2 s c1 c2 r1 r2 hes het hms hmt hen hmnhmsn=simplify(s^2*0.047+s*0.31385+0.455); hmsd=simplify(s^2*0.037+s*0.31385+0.455); hms=hmsn/hmsd; pretty(hms) disp('Funcin de transferencia del sistema mecnico'), pause; hmt=tf([0.047 0.31385 0.455],[0.037 0.31385 0.455]); hmn=step(hmt,[0:0.1:5]); figure plot([0:0.1:5],hmn), grid disp('El sistema es estable')
Respuesta:
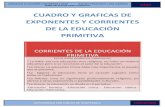
Hallando el funcin de transferencia del sistema de control:
Dando valores a las variables se obtiene:
s^4 + 22 s^3 + 91 s^2 + 120 s + 50 -------------------------------------- s^4 + 22 s^3 + 93 s^2 + 121 s + 50
Cdigo:clear all; clcfprintf('Parametros del Sistema...\n');K1=input('K1= '); K2=input('K2= '); b1=input('b1= '); b2=input('b2= '); fprintf('Parametros del Controlador...\n');Kp=input('Kp[20]= '); % Kp = 20Ki=input('Ki[50]= '); % Ki = 50Kd=input('Kd[ 1]= '); % Kd = 1h=input('Periodo de Muestreo [h=0.1] : ');te=input('Tiempo de Evaluacion [Escalon]: ');n=te/h;%***********************************************************************% RESPUESTA AL ESCALON UNITARIO STANDARDfprintf('\nFuncion de Transferencia del Sistema...\n');nums=[1 22 91 120 50] dens=[1 22 93 121 50] printsys(nums,dens,'s');fprintf('\nFuncion de Transferencia del Controlador...\n');numc=[Kd Kp Ki];denc=[0 1 0];printsys(numc,denc);numg=conv(numc,nums);deng=conv(denc,dens);numh=[1];denh=[1];fprintf('\nF.T. del Sistema de Control...\n');[numsc,densc]=feedback(numg,deng,numh,denh);printsys(numsc,densc);step(nums,dens);hold on, step(numsc,densc);grid, zoom onlegend('Vc_S/C', 'Vc_C/C', 'Location', 'Best')title('Respuesta al Escalon Con y Sin Controlador')xlabel('t'), ylabel('Vc(t)CC&SC')%***********************************************************************% RESPUESTA AL ESCALON UNITARIO POR EULER%************% a1=Kd*b1*b2; a2=Kp+1/(R*C); a3=Ki+1/(L*C);% b1=Kd/(R*C); b2=Kp/(R*C); b3=Ki/(R*C);% c1=a3/a1; c2=(b1*a3/(a1^2)-b3/a1);% c3=a2/a1; c4=(a2*b1/(a1^2)-b2/a1); c5=b1/a1;% t(1)=0; u(1)=1; x1(1)=0; x2(1)=0; % Condiciones Iniciales% Vc(1)=0; Error(1)=Vc(1)-u(1); % Condiciones Iniciales%*******************************%h=0.1; % Periodo de Muestreo%n=input('Numero de particiones: ');for i=1:nt(i+1)=t(i)+h;u(i+1)=1;x1(i+1)=x1(i)+h*(c1*x2(i)+c2*u(i)); % S.Eulerx2(i+1)=x2(i)+h*(-x1(i)-c3*x2(i)-c4*u(i)); % S.EulerVc(i+1)=x2(i+1)+c5*u(i+1); % S.EulerError(i+1)=Vc(i+1)-u(i+1); % S.Eulerend%disp(' t u x1 x2')%[t' u' x1' x2']%**********************************************************************figure; plot(t,u,'r',t,Vc,'k',t,Error,'b'), grid, zoom onlegend('t vs u [Vi(t)]', 't vs Vc(t)', 't vs Err(t)', 'Location', 'Best')title('Solucion de Sistema Por Metodo de Euler')xlabel('t'), ylabel('u(t),Vc(t),Err(t)')mx=0;Mx=max(t);my=min([min(u) min(Vc) min(Error)]);My=max([max(u) max(Vc) max(Error)]);axis([mx Mx my My])%**********************************************************************
Conclusiones
Con el desarrollo de esta prctica se pudieron afianzar los conocimientos matemticos tiles para el anlisis y solucin de sistemas fsicos (mecnicos, elctricos, hidrulicos, etc.) mediante modelado matemtico. Con ayuda de la herramienta Matlab pudimos simular la respuesta en el tiempo de los sistemas fsicos propuestos en la prctica y as entendimos con ayuda de esta simulacin cuando un sistema es estable o inestable. Al desarrollar esta prctica nos dimos cuenta de que un modelo matemtico de un sistema fsico puede cambiar dependiendo de la perspectiva de sus mismas variables. Se pudo comprender en general que en Matlab con ayuda de la matemtica simblica se nos facilitan muchos clculos matemticos que cuando los realizamos sin una herramienta software de alta capacidad nos complican el desarrollo de los problemas, se nos hacen complejos por las cantidades de variables que se deben de tener en cuenta cuando realizamos el anlisis respectivo de este problema. La matemtica simblica de Matlab es muy importante para el clculo en general.