
Tema 3: Modelado de Sistemas - Sitio Web Rectorado · 3 Modelado de Sistemas n Modelo:...
48
Tema 3: Modelado de Sistemas
Transcript of Tema 3: Modelado de Sistemas - Sitio Web Rectorado · 3 Modelado de Sistemas n Modelo:...

Tema 3: Modelado de Sistemas

2
Índice del tema
n Modelado de sistemas
n Modelado de sistemas mecánicos
n Modelado de sistemas hidráulicos
n Modelado de sistemas eléctricos
n Modelado de sistemas térmicos
n Linealización de modelos
n Simulación de sistemas

3
Modelado de Sistemas
n Modelo: representación de un sistema ¨ Representación matemática: Ecuaciones diferenciales
n Modelo bien planteado: Nº Ecuaciones=Nº variables independientes implicadas
¨ Modelado a escalan Utilidad del modelo
¨ Análisis del comportamiento¨ Simulación del comportamiento
n Identificación de un modelo¨ Determinación de los parámetros del modelo a partir de ensayos
experimentales.¨ Muy importante en ingeniería

4
Modelado de Sistemas
n Exactitud frente a sencillez del modelo¨ Compromiso
¨ Selección del modelo según su utilidadn Análisis:
¨ Objetivo estudio cualitativo del comportamiento¨ El análisis es una tarea compleja¨ Preferiblemente sencillo recogiendo la dinámica
n Simulación¨ Objetivo: reproducir con fiabilidad la evolución del sistema¨ Es una tarea más sencilla (integración numérica)¨ Preferiblemente modelos con errores pequeños
ErrorComplejidad

5
Modelado de Sistemasn Clasificación de los modelos
¨ Deterministas y no deterministas¨ Paramétricos y no paramétricos
n Modelado paramétrico se basa en¨ Modelo de fenómenos elementales¨ Ecuaciones de balance
n Modelado no paramétrico o caja negra¨ El modelo se determina a partir de la respuesta del sistema
¨ Parámetros concentrados y distribuidos
u
R
Cy
6
Índice del tema
n Modelado de sistemas
n Modelado de sistemas mecánicos
n Modelado de sistemas hidráulicos
n Modelado de sistemas eléctricos
n Modelado de sistemas térmicos
n Linealización de modelos
n Simulación de sistemas

7
Sistemas mecánicos
8
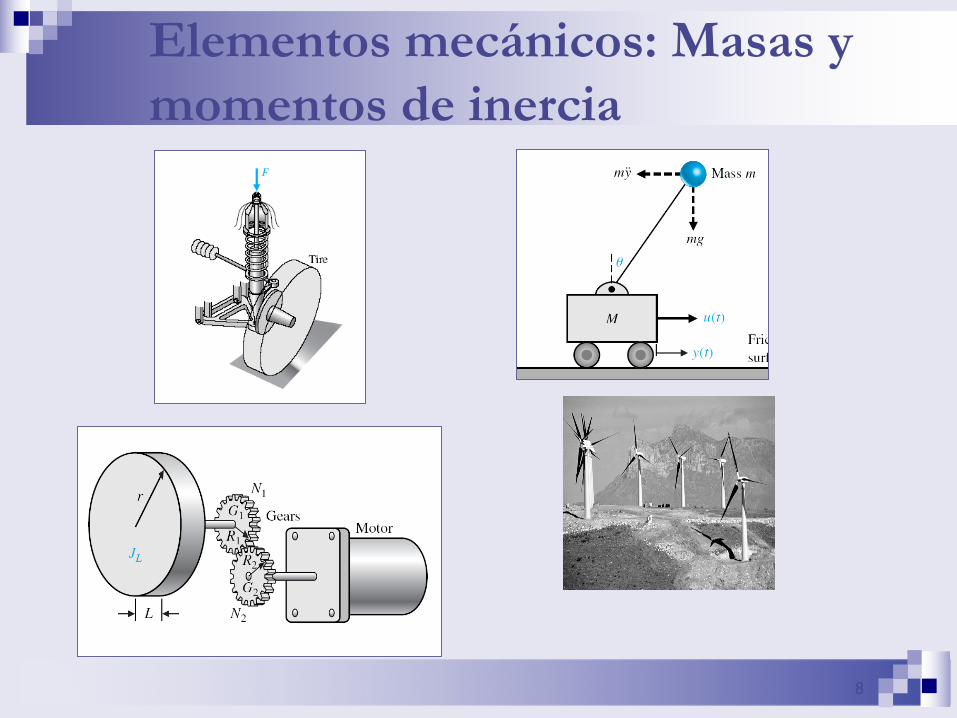
Elementos mecánicos: Masas y momentos de inercia

9
Elementos mecánicos: momentos de inercia
Momentos de inercia de cuerpos simplesJ
anillo delgado respecto al eje de revolución mr2
cilindro macizo respecto a su eje de revolución mr2 /2
varilla respecto a un eje que pasa por su centro perpendicular a la misma mr2 /12
anillo delgado respecto a un diámetro mr2 /2 esfera respecto a un diámetro 2mr2 / 5
)()( 22 continuomediodVrJpuntualesmasasrmJVi
ii òå == r

10
Elementos mecánicos: resortes
)( nm llKF -=
)( nm KT qq -=
Modela la deformación elástica

11
Elemento: amortiguador
dtdlBFa =
Modela la fricción viscosa

12
Elementos mecánicos: cojinetes
Elementos de sustentaciónde los ejes
Modelo: Fricción
dtdBTaq
=

13
Elementos mecánicos: engranajes

14
Elementos mecánicos: engranajes

15
Sistemas mecánicos

16
Sistemas mecánicos
Traslación
Rotación
17
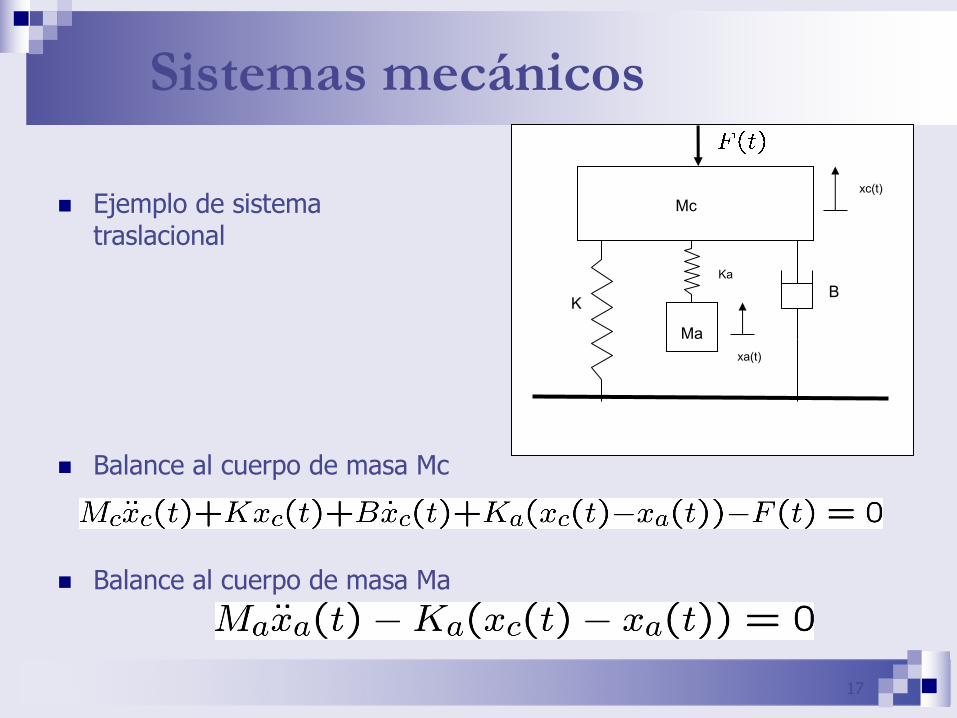
Sistemas mecánicos
n Ejemplo de sistema traslacional
n Balance al cuerpo de masa Mc
n Balance al cuerpo de masa Ma
xa(t)
Ka
KB
Mc
Ma
xc(t)
18
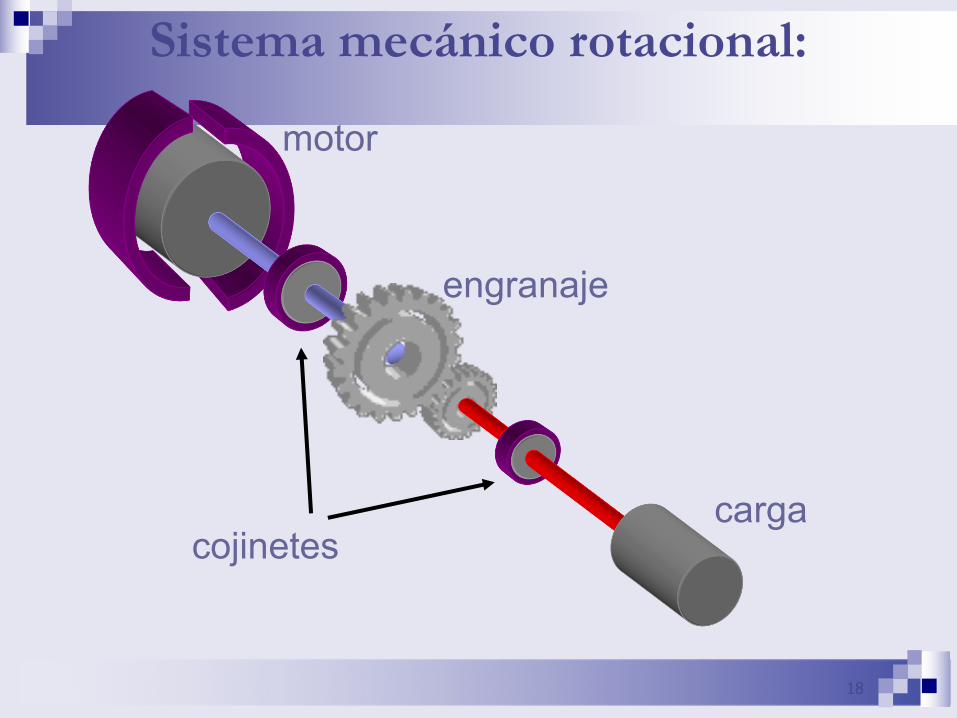
Sistema mecánico rotacional:
motor
cojinetes
engranaje
carga

19
Sistema mecánico rotacional: Tmotor
Ti1TB1
Tr1
Tmotor: Par motor responsable del movimiento del eje 1q1
q2
Ti1: Par de inercia del eje 1. Par resistente (contrario al mov.)
TB1: Par de fricción viscosa del eje 1. Par resistente (contrario al mov.)
Tr1: Par resistente en el eje1 debido al eje 2
(contrario al mov.)
Eje 1 : Tmotor-Ti1-TB1-Tr1=0S T=0

20
Sistema mecánico rotacional:
Tr1
Tm2
q1
q2
Tm2 :Par motor del eje 2 (Responsable del mov.del eje 2)
Engranaje:Tm2=Tr1 R2/R1
Tr1: Par resistente en el eje1 debido al eje 2
(contrario al mov. en eje 1)
21
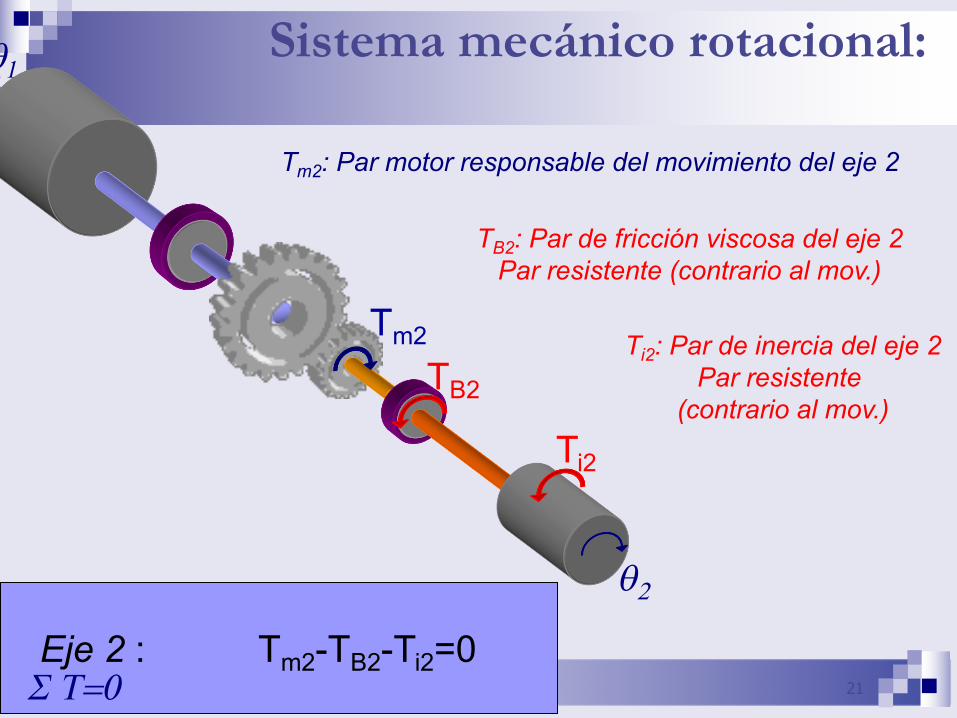
Sistema mecánico rotacional:
Tm2
TB2
Ti2
q1
q2
TB2: Par de fricción viscosa del eje 2Par resistente (contrario al mov.)
Ti2: Par de inercia del eje 2Par resistente
(contrario al mov.)
Eje 2 : Tm2-TB2-Ti2=0 S T=0
Tm2: Par motor responsable del movimiento del eje 2

22
Sistema mecánico rotacional

23
Índice del tema
n Modelado de sistemas
n Modelado de sistemas mecánicos
n Modelado de sistemas hidráulicos
n Modelado de sistemas eléctricos
n Modelado de sistemas térmicos
n Linealización de modelos
n Simulación de sistemas

24
Sistemas hidráulicos: depósito

25
Sistemas hidráulicos: válvulas y tuberías
Asiento
Mariposa
Bola

26
Sistemas hidráulicos: válvulas y tuberías
El fluido circula impulsado por la diferencia de presión
Cerrando la válvula (o añadiendo más tubería) se aumentan las pérdidas
Menor caudal
Presión de impulsión Caída de presión en instalación
Q
P

27
Sistemas hidráulicos: válvulas y tuberías
n TuberíaK=Coef. pérdidas
• Material• Longitud• Geometría• Condiciones del flujo
Ec. Bernouilli
Para una misma diferencia de presión: ↑K → ↓ v → ↓ q

28
n Válvulas
Sistemas hidráulicos: válvulas y tuberías
Apertura rápidaLinealIsoporcentual

29
Sistemas hidráulicos

30
Índice del tema
n Modelado de sistemas
n Modelado de sistemas mecánicos
n Modelado de sistemas hidráulicos
n Modelado de sistemas eléctricos
n Modelado de sistemas térmicos
n Linealización de modelos
n Simulación de sistemas
31
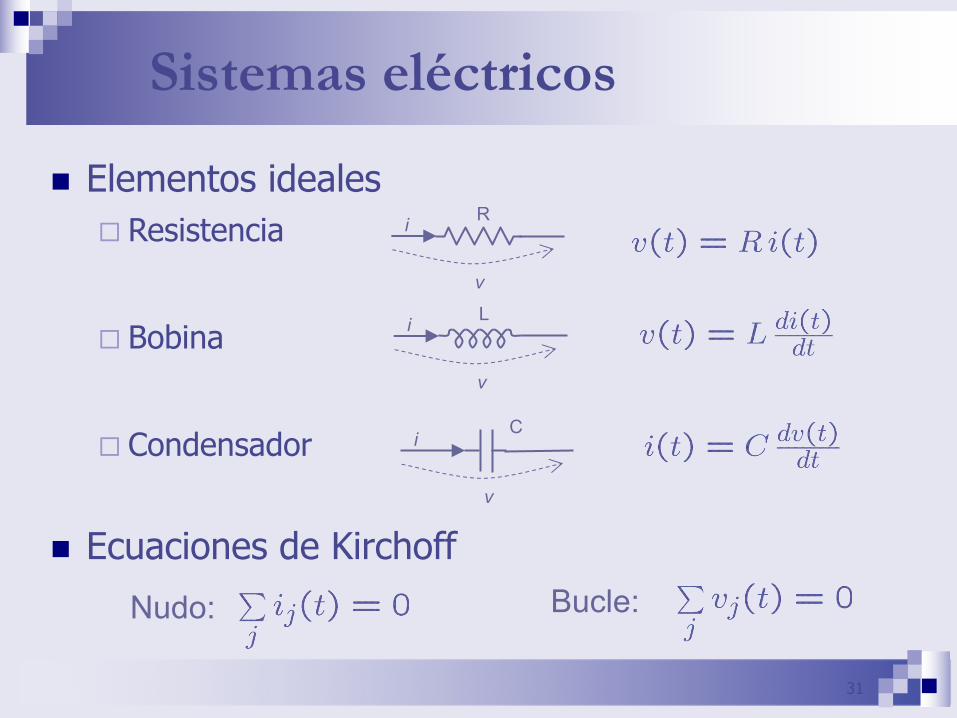
Sistemas eléctricos
n Elementos ideales¨ Resistencia
¨ Bobina
¨ Condensador
n Ecuaciones de Kirchoff
Ri
v
Li
v
Ci
v
Nudo: Bucle:
32
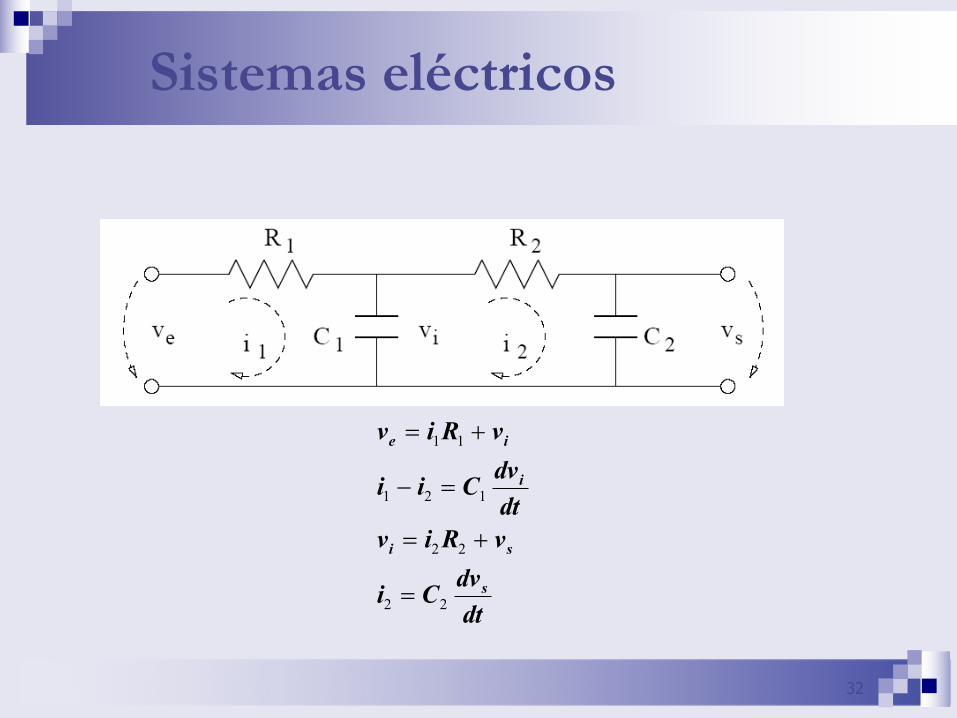
Sistemas eléctricos
dtdvCi
vRivdtdvCii
vRiv
s
si
i
ie
22
22
121
11
=
+=
=-
+=

33
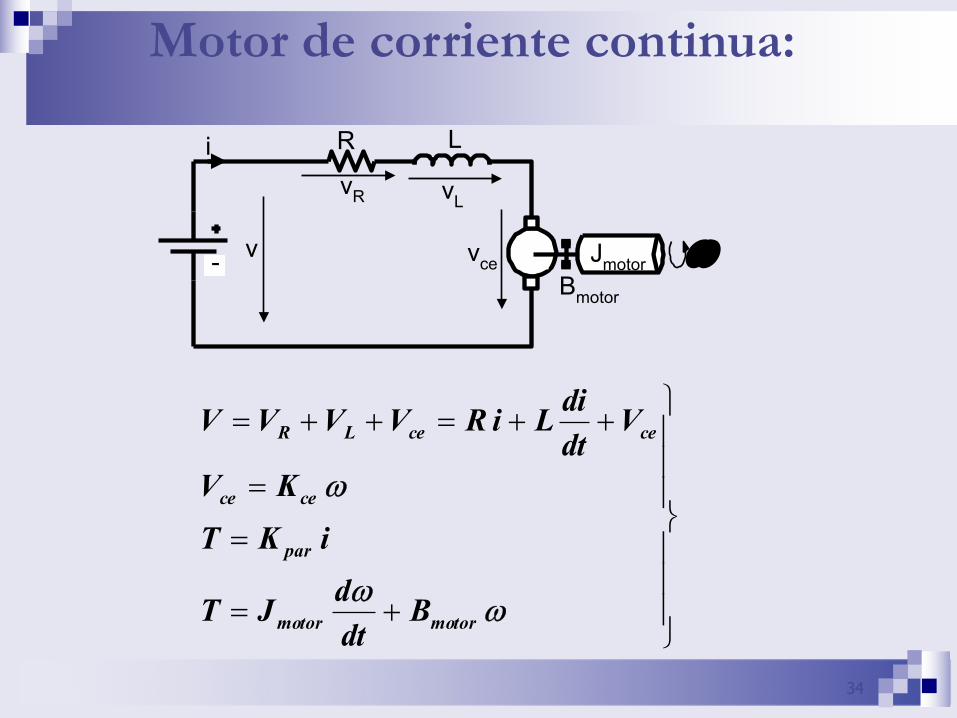
Motor de corriente continua:
34
Motor de corriente continua:
ïïï
þ
ïïï
ý
ü
+=
=
=
++=++=
ww
w
motormotor
par
cece
ceceLR
BdtdJT
iKTKV
VdtdiLiRVVVV
R L
vcev
vR vL
JmotorMBmotor
i
- w
35
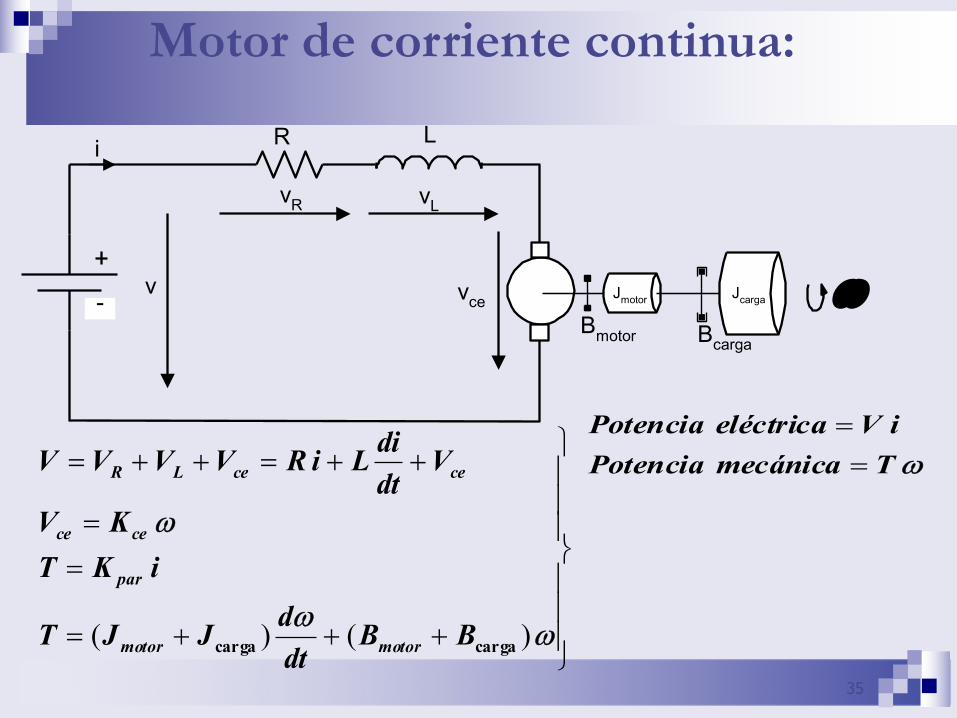
Motor de corriente continua:
ïïï
þ
ïïï
ý
ü
+++=
==
++=++=
ww
w
)()( cargacarga BBdtdJJT
iKTKV
VdtdiLiRVVVV
motormotor
par
cece
ceceLR
R L
vcev
vR vL
JmotorM Jcarga
Bmotor Bcarga
i
- w
wTmecánicaPotenciaiVeléctricaPotencia
==
36
Índice del tema
n Modelado de sistemas
n Modelado de sistemas mecánicos
n Modelado de sistemas hidráulicos
n Modelado de sistemas eléctricos
n Modelado de sistemas térmicos
n Linealización de modelos
n Simulación de sistemas

37
Sistemas térmicos
n Mecanismos de transferencia de Calor¨ Conducción:
n Materiales en contacto a distintas temperaturas

38
Sistemas térmicos
¨ Convección forzadanatural
Depende de:• Condiciones del flujo (Re)• Velocidad del fluido• Características del fluido
Aproximación lineal

39
Sistemas térmicos
¨ Radiación
¨ Mecanismos combinados
Depende de• Posición relativa (Factor de forma)• Medio en el que se propaga
U Coeficiente global de transferencia de calor

40
Sistemas térmicos
n Balance de Energía
(Simplificación)

41
Índice del tema
n Modelado de sistemas
n Modelado de sistemas mecánicos
n Modelado de sistemas hidráulicos
n Modelado de sistemas eléctricos
n Modelado de sistemas térmicos
n Linealización de modelos
n Simulación de sistemas

42
Linealización de sistemas
n Objetivo: ¨ obtener modelos lineales aproximados a partir de modelos no lineales
n Punto de funcionamiento: ¨ Punto de equilibrio en torno al que se linealiza
n Propiedades: ¨ Representa bien al sistema en una cierta zona en torno a un punto de
equilibrio.¨ Fuera de la zona de validez, el modelo linealizado tiene un error
demasiado grande.
43
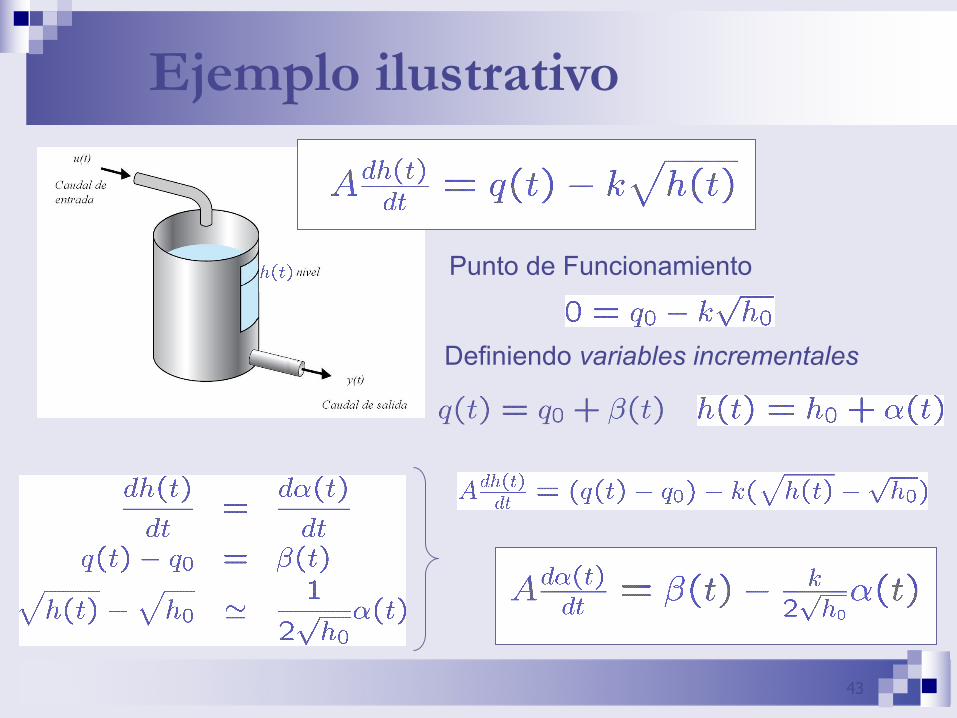
Ejemplo ilustrativo
Punto de Funcionamiento
Definiendo variables incrementales
44
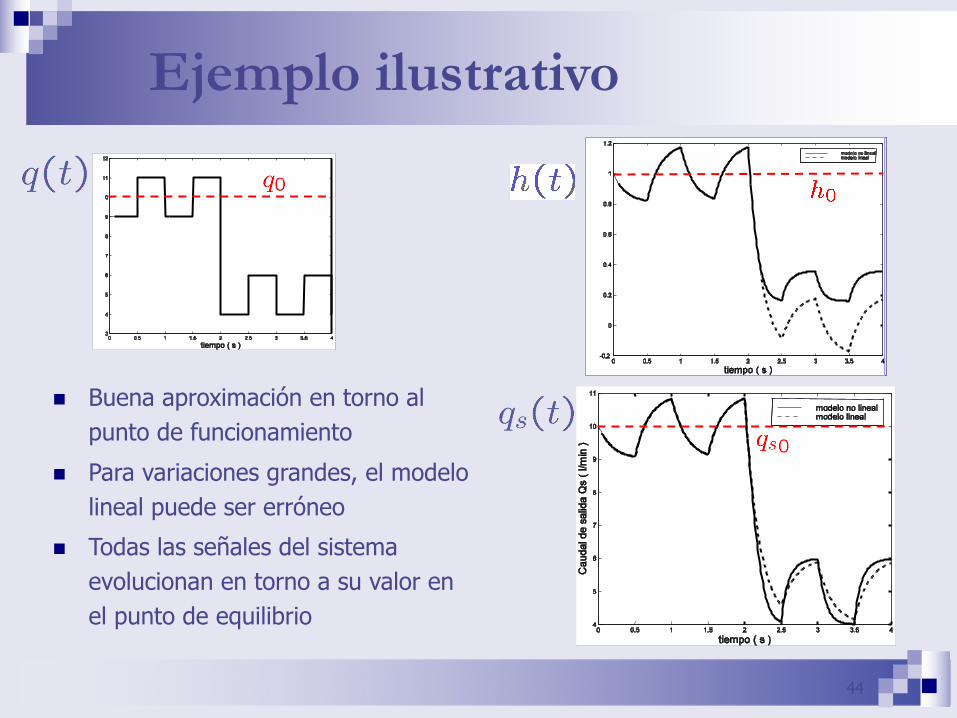
Ejemplo ilustrativo
n Buena aproximación en torno al punto de funcionamiento
n Para variaciones grandes, el modelo lineal puede ser erróneo
n Todas las señales del sistema evolucionan en torno a su valor en el punto de equilibrio

45
Linealización de sistemas
Las variables incrementales dependendel punto de funcionamiento elegido

46
Linealización de sistemas

47
Ejemplo

48
Simulación de sistemas¨ Integración numérica de las ecuaciones diferenciales
¨ Discretización del tiempo {t0, t1, t2,…} n Paso de integración
¨ Determinación de las salidas {y0, y1, y2,…} ¨ Ejemplo: método de Euler
Modelo
entradas salidas
condiciones iniciales
SIMULADOR
÷÷ø
öççè
æ-= )()(1)( tyAK
tqA
ty p!
÷÷ø
öççè
æ-+= --- 1k
p1k1kk yAK
qA1hyy
n Inicio: y0=y(0)n Para k=1 hasta N
¨ tk=k h¨
n Fin


















![Modelado Conceptual - InicioBD-2011-12]Apuntes_ModeladoConceptual.pdf · Modelo Conceptual 4 1. El Modelado Conceptual de Datos en el Proceso de Desarrollo Software El modelado conceptual](https://static.fdocuments.ec/doc/165x107/5e1ced94a441680d4f554a71/modelado-conceptual-bd-2011-12apuntesmodeladoconceptualpdf-modelo-conceptual.jpg)