TEMA 2 DINÁMICA DE LA PARTÍCULA CONSEJOS...
34
TEMA 2 DINÁMICA DE LA PARTÍCULA CONSEJOS PREVIOS A LA RESOLUCIÓN DE LOS PROBLEMAS Para tener éxito al aplicar la segunda ley de Newton a un sistema mecánico, primero se debe ser capaz de identificar todas las fuerzas que actúan sobre él, es decir, se debe ser capaz de construir el diagrama de cuerpo libre correcto. ¿Cómo se debe realizar este diagrama? Inicialmente, se define un sistema mecánico como un cuerpo o grupo de cuerpos que pueden aislarse de los demás cuerpos. Dicho sistema puede ser un cuerpo único o una combinación de cuerpos conectados. Los cuerpos pueden ser rígidos o no. El sistema puede ser también una masa definida de un fluido, líquido o gas, o una combinación de fluidos y sólidos. Una vez decidido qué cuerpo o combinación de cuerpos hay que analizar, se aísla este cuerpo o combinación de cuerpos de todos los demás cuerpos que lo rodean. Este aislamiento se logra mediante el diagrama del cuerpo libre, que es una representación esquemática del cuerpo o conjunto de cuerpos aislado en la que figuran todas las fuerzas aplicadas a él por otros cuerpos que se consideran suprimidos. Solamente después de haber trazado con cuidado este diagrama se podrá llevar a cabo el cálculo de las distintas fuerzas. En las figuras que aparecen a continuación pueden verse los tipos corrientes de aplicación de fuerzas a sistemas mecánicos. En cada ejemplo se indica la fuerza ejercida sobre el cuerpo que se aísla por el cuerpo que se suprime. La tercera ley de Newton, que establece la existencia de una reacción igual y opuesta a toda acción, deberá cumplirse estrictamente. Presentamos aquí la acción de un cable, correa, cuerda o cadena flexibles sobre el cuerpo al cual está unido. A causa de su flexibilidad, un cable no puede ofrecer resistencia a la flexión, cortadura o compresión, por lo que ejerce una fuerza tensora de tracción tangente al cable en su punto de amarre. La fuerza ejercida por el cable sobre el cuerpo al que está unido siempre está dirigida hacia fuera del cuerpo. En lo que veremos este curso, la tensión T es grande frente al peso del cable, por lo que éste puede suponerse que adopta forma rectilínea. Cuando están en contacto las superficies lisas de dos cuerpos, como en este segundo ejemplo, la fuerza que ejerce una sobre la otra es normal al plano tangente a ambas superficies y compresiva. Aún cuando las superficies reales no son nunca completamente lisas, esta hipótesis está justificada en la práctica en muchos casos. Cuando las superficies en contacto de los cuerpos son rugosas, la fuerza de contacto no será normal al plano tangente a las superficies, sino que se podrá descomponer en una componente tangencial o de rozamiento F y una componente normal N.
-
Upload
truongmien -
Category
Documents
-
view
218 -
download
2
Transcript of TEMA 2 DINÁMICA DE LA PARTÍCULA CONSEJOS...

TEMA 2 DINÁMICA DE LA PARTÍCULA
CONSEJOS PREVIOS A LA RESOLUCIÓN DE LOS PROBLEMAS
Para tener éxito al aplicar la segunda ley de Newton a un sistema mecánico, primero se debe ser capaz de identificar todas las fuerzas que actúan sobre él, es decir, se debe ser capaz de construir el diagrama de cuerpo libre correcto. ¿Cómo se debe realizar este diagrama? Inicialmente, se define un sistema mecánico como un cuerpo o grupo de cuerpos que pueden aislarse de los demás cuerpos. Dicho sistema puede ser un cuerpo único o una combinación de cuerpos conectados. Los cuerpos pueden ser rígidos o no. El sistema puede ser también una masa definida de un fluido, líquido o gas, o una combinación de fluidos y sólidos. Una vez decidido qué cuerpo o combinación de cuerpos hay que analizar, se aísla este cuerpo o combinación de cuerpos de todos los demás cuerpos que lo rodean. Este aislamiento se logra mediante el diagrama del cuerpo libre, que es una representación esquemática del cuerpo o conjunto de cuerpos aislado en la que figuran todas las fuerzas aplicadas a él por otros cuerpos que se consideran suprimidos. Solamente después de haber trazado con cuidado este diagrama se podrá llevar a cabo el cálculo de las distintas fuerzas. En las figuras que aparecen a continuación pueden verse los tipos corrientes de aplicación de fuerzas a sistemas mecánicos. En cada ejemplo se indica la fuerza ejercida sobre el cuerpo que se aísla por el cuerpo que se suprime. La tercera ley de Newton, que establece la existencia de una reacción igual y opuesta a toda acción, deberá cumplirse estrictamente.
Presentamos aquí la acción de un cable, correa, cuerda o cadena flexibles sobre el cuerpo al cual está unido. A causa de su flexibilidad, un cable
no puede ofrecer resistencia a la flexión, cortadura o compresión, por lo que ejerce una fuerza tensora de tracción tangente al cable en su punto de amarre. La fuerza ejercida por el cable sobre el cuerpo al que está unido siempre está dirigida hacia fuera del cuerpo. En lo que veremos este curso, la tensión T es grande frente al peso del cable, por lo que éste puede suponerse que adopta forma rectilínea.
Cuando están en contacto las superficies lisas de dos cuerpos, como en este segundo ejemplo, la fuerza que ejerce una sobre la otra es normal al plano tangente a ambas superficies y compresiva. Aún cuando las
superficies reales no son nunca completamente lisas, esta hipótesis está justificada en la práctica en muchos casos.
Cuando las superficies en contacto de los cuerpos son rugosas, la fuerza de contacto no será normal al plano tangente a las superficies, sino que se podrá descomponer en una componente tangencial o de rozamiento F y una
componente normal N.

Los apoyos de rodillo, zapata o bola transmiten una fuerza compresiva normal a la superficie de apoyo. Una guía de deslizamiento libre es un collar o corredera que puede moverse
libremente a lo largo de guías lisas; puede resistir solamente fuerza normal a la guía. No hay resistencia paralela a la guía.
Una conexión de pasador articulada libremente puede resistir una fuerza en cualquier dirección en el plano normal al eje del pasador. Esta acción suele representarse en función de dos componentes rectangulares, Rx y Ry.
Una de las fuerzas más corrientes es la debida a la atracción de la gravedad. Dicha fuerza afecta a todos los elementos de un cuerpo y en consecuencia, está uniformemente
distribuida por todo él. La resultante de las fuerzas de la gravedad que se ejercen sobre todos los elementos es el peso P del cuerpo; pasa por el centro de gravedad G y está dirigido hacia el centro de la Tierra en el caso de las estructuras ligadas a la Tierra.
La fuerza ejercida por un resorte elástico lineal, sea tensión o compresión, está dada por F=kx, donde k es la constante del resorte y x su deformación medida a partir de la posición neutral o de deformación
nula. La linealidad de la relación fuerza-deformación describe igual fuerza para igual deformación durante el proceso de carga y descarga del resorte. Es conveniente que se examine estos diagramas con cuidado y a continuación se proceda a construir los diagramas de otros sistemas descritos en los ejercicios. Cuando un sistema contiene más de un elemento, es importante que se construya un diagrama de cuerpo libre de cada uno de los elementos. Define siempre tu sistema de coordenadas. Siempre es útil un diagrama que te indique el origen y la dirección del eje positivo. Si conoces la dirección de la aceleración suele ser conveniente tomarla como dirección positiva. Debes ser consistente con los signos. Una vez definido un eje y su dirección positiva, las componentes de velocidad, fuerza y aceleración en esa dirección serán positivas. Al aplicar la primera o segunda ley de Newton concéntrate en un cuerpo específico. Dibuja un diagrama del cuerpo libre como acabamos de explicarte con todas las fuerzas que actúan sobre él, sin incluir las que actúan sobre otros cuerpos. La aceleración del cuerpo está determinada por las fuerzas que actúan sobre él, no por las que él ejerce sobre otros cuerpos. En tu diagrama normalmente podrás representar el cuerpo como una partícula. Puede serte útil usar colores para los vectores fuerza. Para evitar confusiones, los únicos vectores en tu diagrama deberán ser fuerzas; no incluyas otros como velocidades y aceleraciones. Es muy útil dibujar al lado un nuevo diagrama del mismo cuerpo con las

aceleraciones correspondientes. Si representas una fuerza en términos de sus componentes haz una línea ondulada en el vector original para no incluirlo dos veces. Si hay dos o más cuerpos puedes usar un sistema de ejes distinto para cada uno, pero en las ecuaciones de cada cuerpo los signos de las componentes deben ser consecuentes con los ejes escogidos para ese cuerpo. Identifica las cantidades conocidas y desconocidas y asigna símbolos algebraicos a estas últimas. Si conoces la dirección de una fuerza desde el principio, usa un símbolo para representar su magnitud (siempre positiva). Recuerda que la componente de esta fuerza en cierta dirección puede ser positiva o negativa. Escribe la primera o segunda ley de Newton en forma de componentes, usando el sistema de coordenadas que has elegido desde el principio. Despeja las incógnitas en estas ecuaciones. Comprueba siempre la coherencia de las unidades. Si está implicado más de un cuerpo, repite los pasos explicados para cada uno de ellos. Puede haber relaciones entre los movimientos de los cuerpos; por ejemplo, pueden estar conectados por una cuerda. Expresa tales relaciones en forma algebraica como relaciones entre las aceleraciones de los distintos cuerpos y luego resuelve las ecuaciones para obtener los valores de las incógnitas. En resumen, para la realización correcta de un diagrama de cuerpor libre, que será la base de los problemas de dinámica y lo que nos permitirá resolverlos correctamente, deberemos seguir los siguientes pasos: Paso 1. Decidir claramente qué cuerpo o combinación de cuerpos hay que aislar. El cuerpo elegido contendrá una o más de las cantidades desconocidas buscadas. Paso 2. Aislar el cuerpo o combinación de cuerpos elegido mediante un diagrama que represente por completo su contorno. El esquema del contorno deberá representar una superficie cerrada en el espacio, la cual define el aislamiento del cuerpo de todos los demás cuerpos en contacto o que ejerzan atracciones, los cuales se consideran suprimidos. Este paso es quizá el más importante de todos. Deberás asegurarte siempre de que has aislado por completo el cuerpo antes de proceder al paso siguiente. Paso 3. A continuación se representan en sus posiciones apropiadas en el diagrama todas las fuerzas que se ejercen sobre el cuerpo aislado por los cuerpos suprimidos. El recorrido sistemático de todo el contorno revelará todas esas fuerzas. Se incluirán los pesos donde sean apreciables. Las fuerzas conocidas se representarán mediante flechas con su magnitud, dirección y sentido indicados. Las fuerzas desconocidas se representarán mediante flechas con la magnitud o dirección desconocida indicada con un símbolo. Si también se desconoce el sentido del vector, puede suponérsele arbitrariamente. Los cálculos revelarán una magnitud positiva si el sentido supuesto era el correcto y una magnitud negativa si el sentido supuesto era falso. Es necesario mantener las características asignadas a las fuerzas desconocidas a lo largo de todos los cálculos. Paso 4. Deberán indicarse directamente sobre el diagrama los ejes coordenados elegidos. También pueden representarse a voluntad las dimensiones geométricas pertinentes. Sin embargo, téngase en cuenta que el diagrama para cuerpo libre está destinado a concentrar nuestra atención sobre la acción de fuerzas exteriores y por tanto

no conviene enredar el diagrama con una información extraña excesiva. Las flechas representativas de las fuerzas deben distinguirse claramente de toda otra flecha que pueda aparecer, para que no haya confusión posible. Una vez realizados los cuatro pasos anteriores se tendrá un diagrama para cuerpo libre correcto y se habrá despejado el camino a seguir para aplicar los principios de la Mecánica, tanto en Estática como en Dinámica. Muchas veces te sentirás tentado a omitir del diagrama para cuerpo libre ciertas fuerzas que a primera vista puede parecer que no son necesarias en los cálculos. Caer en esta tentación conduce a cometer un gran error. Solamente con un aislamiento completo y una representación sistemática de todas las fuerzas exteriores se pueden interpretar adecuadamente los efectos de todas las fuerzas aplicadas y reactivas. Muy frecuentemente, una fuerza que a primera vista parece no tener influencia sobre uno de los resultados buscados resulta tenerla. Así pues, el único procedimiento seguro es hacer que en el diagrama figuren todas las fuerzas cuyas magnitudes no sean despreciables.

TEMA 2 DINÁMICA DE LA PARTÍCULA
PROBLEMAS
1 . - Una pequeña esfera de masa m, atada a uno de los extremos de una cuerda de longitud l cuyo otro extremo está fijo en un punto, describe una circunferencia de radio l en un plano vertical a velocidad constante. Calcula la tensión máxima de la cuerda.
Hacemos el diagrama de sólido
libre de la esfera. En cualquier instante tendremos que la esfera está sometida a su peso (vertical y hacia abajo) y a la tensión en la cuerda. En cuanto a aceleraciones, tendremos sólo la componente normal de la aceleración, ya que el módulo de la velocidad es
constante. Dicha aceleración tiene la dirección del radio de curvatura y apuntando hacia el centro de curvatura. Vemos que en la mitad superior de la trayectoria la tensión y la componente normal del peso tienen el mismo sentido, de modo que si aplicamos la segunda ley de Newton a la dirección normal tendremos:
θ−=⇒=θ+⇒=Σ cosmgl
vmTl
vmcosmgTmaF22
nn
Sin embargo, en la mitad inferior de la trayectoria estas dos fuerzas tienen sentido contrario, y aplicando la misma ley llegamos a:
lvmcosmgTmaF
2nn =θ−⇒=Σ
θ+= cosmgl
vmT2
Por tanto ya vemos que la tensión en principio es mayor en la parte inferior de la trayectoria que en la superior. Además, si queremos que la tensión sea lo más grande posible el término cosθ=1 ⇒ θ=0º, lo cual ocurrirá en la parte más baja de la trayectoria. Así pues, la tensión máxima vale:
+=+=θ+= g
lvmmg
lvmcosmg
lvmT
222
+= g
lvmT
2

2. - Las masas de los bloques de la figura son mA=1 0 kg y mB=5 kg. Inicialmente los bloques están en reposo sobre el suelo, unidos por un hilo sin masa que pasa a través de una polea de masa y rozamiento despreciables. Si se le aplica una fuerza F=248 N hacia arriba a la polea como indica la figura calcula las aceleraciones aA y aB de los bloques A y B. Puesto que la polea no tiene masa, si la fuerza F es de 248 N
la tensión en la cuerda será la mitad:
N1242
2482FT ===
A la vista de la tensión, es evidente que los dos bloques se desplazan hacia arriba. Ahora hacemos el diagrama de sólido libre del bloque A y aplicamos la segunda ley de Newton:
ΣFY=mAaAY ⇒ T-mAg=mAaA ⇒ 2
A
AA m/s6.2
1098124
mgmTa =
−=
−=
aA=2.6 m/s2 De igual manera hacemos el diagrama de sólido libre del bloque B y tendremos:
T-mBg=mBaB ⇒ 2
B
BB m/s15
549124
mgmTa =
−=
−=
aB=15 m/s2
3. - Los bloques A y B que pesan, respectivamente, 1 000 N y 400 N, están conectados mediante una cuerda según se indica en la figura. Determinar: a) la aceleración del bloque B; b) la tensión de la cuerda. a) Las masas de los bloques serán:
kg04.1028.9
1000gPm A
A ===
kg82.408.9
400gPm B
B ===
Las aceleraciones no son independientes, sino que están relacionadas. Para encontrar la relación entre ellas llamamos yA a la posición en cada instante del bloque A e yB a la posición en cada instante del bloque B, tal como aparece en la figura. Es evidente que:
BB
AA v
dtdy;v
dtdy
−== ⇒ BB
AA a
dtdv;a
dtdv
==
Podemos escribir la longitud de la cuerda que une los dos bloques como:
L=2yA+yB+ctes Derivando respecto del tiempo:
L=2yA+yB+ctes ⇒ ABBABA v2vvv20
dtdy
dtdy20 =⇒−=⇒+=
Y volviendo a derivar respecto del tiempo:
ABAB
AB a2adt
dv2dtdvv2v =⇒=⇒=
Ahora hacemos el diagrama de sólido libre del bloque B, sometido a su peso y a la acción de la cuerda. Aplicamos la segunda ley de Newton y tenemos:
ΣFY=mBaBY ⇒ T-PB=mBaB ⇒ T-400=40.82aB
Hacemos del mismo modo el diagrama de sólido libre del bloque A y aplicamos la misma ecuación:
ΣFY=mAaAY ⇒PA-2T=mAaA ⇒ 1000-2T=102.04aA
Uniendo estas dos ecuaciones con la que tenemos que nos relaciona las aceleraciones tenemos un sistema de tres ecuaciones y tres incógnitas, que es:
T-400=40.82aB
1000-2T=102.04aA aB=2aA
Sustituimos la tercera ecuación en las dos anteriores: T-400=40.82aB ⇒ T-400=40.82 · 2aA ⇒ T-400=81.63aA
1000-2T=102.04aA Y de la primera ecuación tenemos:
T-400=81.63aA ⇒ T=400+81.63aA Lo sustituimos en la segunda:
1000-2T=102.04aA ⇒ 1000-2(400+81.63aA)=102.04aA ⇒ 1000-800-163.27aA=102.04aA 200=265.31aA ⇒ aA=0.75 m/s2 ⇒ aB=2aA=2 · 0.75=1.51 m/s2
aB=1.51 m/s2 b) Y la tensión en la cuerda:
T=400+81.63aA=400+81.63 · 0.75=461.54 N T=461.54 N
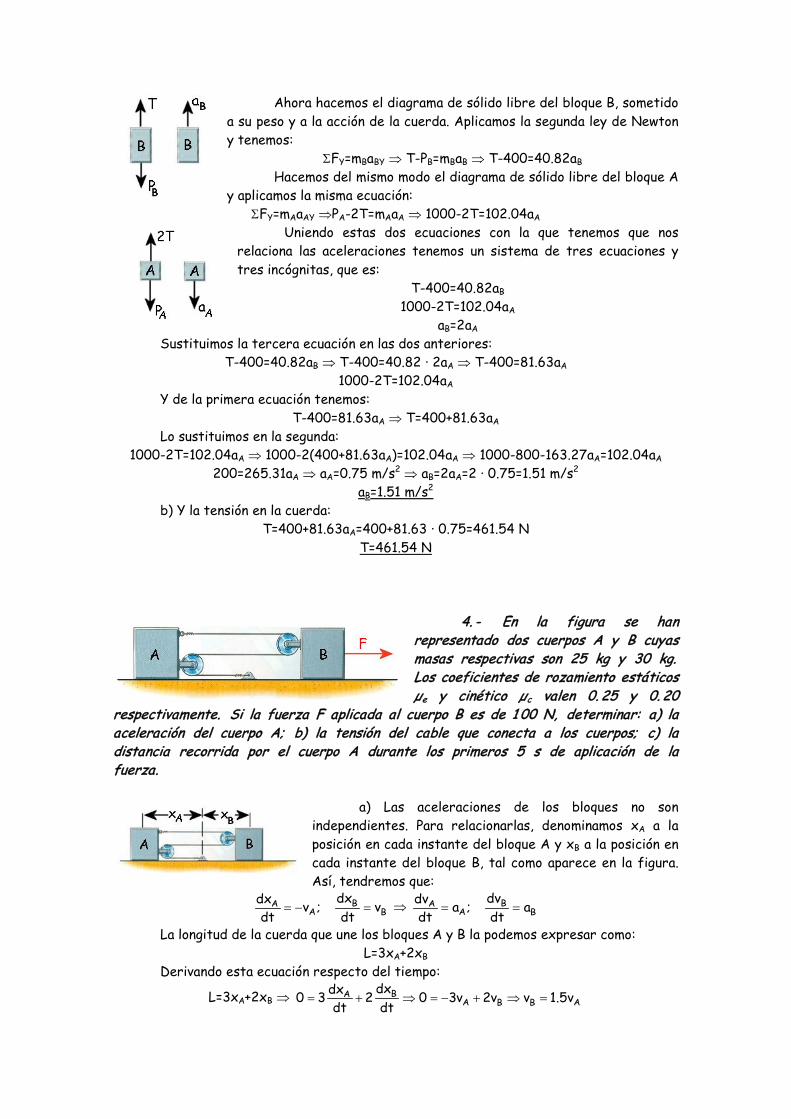
4. - En la figura se han representado dos cuerpos A y B cuyas masas respectivas son 25 kg y 30 kg. Los coeficientes de rozamiento estáticos µe y cinético µc valen 0. 25 y 0. 20
respectivamente. Si la fuerza F aplicada al cuerpo B es de 1 00 N, determinar: a) la aceleración del cuerpo A; b) la tensión del cable que conecta a los cuerpos; c) la distancia recorrida por el cuerpo A durante los primeros 5 s de aplicación de la fuerza.
a) Las aceleraciones de los bloques no son independientes. Para relacionarlas, denominamos xA a la posición en cada instante del bloque A y xB a la posición en cada instante del bloque B, tal como aparece en la figura. Así, tendremos que:
BB
AA v
dtdx;v
dtdx
=−= ⇒ BB
AA a
dtdv;a
dtdv
==
La longitud de la cuerda que une los bloques A y B la podemos expresar como: L=3xA+2xB
Derivando esta ecuación respecto del tiempo:
L=3xA+2xB ⇒ ABBABA v5.1vv2v30
dtdx2
dtdx30 =⇒+−=⇒+=

Y derivando otra vez respecto del tiempo:
ABAB
AB a5.1adt
dv5.1dtdvv5.1v =⇒=⇒=
Ahora hacemos el diagrama de sólido libre del bloque A y aplicamos la segunda ley de Newton al eje Y:
ΣFY=mAaAY ⇒ NA-mAg=0 ⇒ NA=mAg=25 · 9.8=245 N Como el bloque A desliza la fuerza de rozamiento adquiere su valor máximo:
FrA=(FrA)máx=µcNA=0.20 · 245=49 N Y en el eje X:
ΣFX=mAaAX ⇒ 3T-FrA=mAaA ⇒ 3T-49=25aA Operamos de modo similar con el bloque B. Hacemos su diagrama de sólido libre y aplicamos la segunda ley de Newton al eje X:
ΣFY=mBaBY ⇒ NB-mBg=0 ⇒ NB=mBg=30 · 9.8=294 N Como el bloque B también desliza la fuerza de rozamiento adquiere su valor máximo:
FrB=(FrB)máx=µcNB=0.20 · 294=58.8 N Y en el eje X:
ΣFX=mBaBX ⇒ F-2T-FrB=mBaB ⇒ 100-2T-58.8=30aB Estas dos ecuaciones junto con la que nos relaciona las aceleraciones forman un sistema de tres ecuaciones y tres incógnitas:
3T-49=25aA 100-2T-58.8=30aB
aB=1.5aA Sustituimos la tercera en las dos primeras:
3T-49=25aA 100-2T-58.8=30aB ⇒ 100-2T-58.8=30 · 1.5aA ⇒ 41.2-2T=45aA
Ahora despejamos la tensión en la segunda ecuación y sustituimos en la primera: 41.2-2T=45aA ⇒ T=20.6-22.5aA
3T-49=25aA ⇒ 3(20.6-22.5aA)-49=25aA ⇒ 61.8-67.5aA-49=25aA 12.8=92.5aA ⇒ aA=0.138 m/s2
aA=0.138 m/s2 b) A partir de aquí tendremos que la tensión vale:
T=20.6-22.5aA=20.6-22.5 · 0.138=17.486 N T=17.486 N
c) Y para el bloque A, teniendo en cuenta que el movimiento es rectilíneo uniformemente acelerado:
m725.15138.021ta
21tvxx 22
AA0A0A =⋅=++=
xA=1.725 m
5. - Se suelta, partiendo del reposo, el bloque A de 1 0 kg que está situado sobre una cuña B de 20 kg, según se indica en la figura. Si todas las superficies son lisas (exentas de rozamiento), determinar: a) la fuerza normal entre el bloque y la cuña; b) la aceleración del bloque; c) la aceleración

de la cuña. a) Puesto que todas las superficies son lisas no hay fuerzas de rozamiento. Así, en el sistema de dos partículas sólo existen fuerzas verticales, los dos pesos de los dos cuerpos y la normal que ejerce la superficie de apoyo sobre la cuña B. Como todas las fuerzas son verticales, la aceleración del centro de masas tiene que ser vertical, y el centro de masas sólo puede desplazarse verticalmente. Por tanto, cuando el bloque A comience a deslizar sobre la cuña y caiga hacia la derecha, la cuña reacciona desplazándose hacia la izquierda de modo que el centro de masas del sistema no se mueva en la dirección horizontal. El bloque A tiene por tanto movimiento relativo respecto de la cuña, ya que la cuña es un sistema de referencia en traslación que se traslada hacia la izquierda. Ahora vamos a ir haciendo los diagramas de sólido libre. Si empezamos por el bloque A, éste estará sometido sólo a su peso y a la reacción de la cuña, que puesto que es lisa tiene que ser normal (perpendicular a la superficie de apoyo). En cuanto a la aceleración tenemos que dibujar la absoluta, que podemos determinar a partir de:
aA/B=aA-aB ⇒ aA=aA/B+aB Tendremos que sumar la relativa (que será paralela al plano inclinado) más la de la cuña, que es horizontal y hacia la izquierda. Tendremos lo que aparece en la figura. Como ejes tomamos el X paralelo al plano inclinado y positivo hacia abajo y el Y perpendicular al
plano inclinado y positivo hacia arriba. Aplicamos la segunda ley de Newton en estas dos direcciones:
ΣFX=mAaAX ⇒mAgsen30º=mA(aA/B-aBcos30º) gsen30º=aA/B-aBcos30º ⇒ 9.8sen30º=aB/A-aBcos30º
ΣFY=mAaAY ⇒ N-mAgcos30º=-mAaBsen30º N-10 · 9.8cos30º=-10aBsen30º ⇒ N-84.870=-10aBsen30º
Tenemos dos ecuaciones y tres incógnitas (N, aB y aB/A). Hacemos a continuación el diagrama de sólido libre de la cuña B. En este caso tomaremos como ejes unos ejes cartesianos normales, con el X horizontal y positivo hacia la izquierda y el Y vertical y positivo hacia arriba. En cuanto a fuerzas tenemos su peso (vertical y hacia abajo), la normal ejercida por la superficie horizontal (perpendicular a la
superficie de apoyo) y la reacción del bloque A (que por la tercera ley de Newton, principio de acción-reacción, tiene que ser igual y de sentido contrario a la que ejercía B sobre A, es decir, la normal N). Respecto a aceleraciones la cuña B desliza hacia la izquierda luego su aceleración es horizontal y hacia la izquierda. Aplicamos la segunda ley de Newton en el eje X:
ΣFX=mBaBX ⇒ Nsen30º=mBaB ⇒ Nsen30º=20aB Tenemos por tanto un sistema de tres ecuaciones y tres incógnitas:
9.8sen30º=aB/A-aBcos30º N-84.870=-10aBsen30º
Nsen30º=20aB

De la tercera ecuación: Nsen30º=20aB ⇒ aB=0.025N
Y sustituimos en las otras dos: 9.8sen30º=aB/A-aBcos30º ⇒ 9.8sen30º=aB/A-0.025Ncos30º ⇒ 4.9=aB/A-0.0217N
N-84.870=-10aBsen30º ⇒ N-84.870=-10 · 0.025Nsen30º ⇒ N=75.44 N N=75.44 N
b) La aceleración del bloque, aA, vale: aA=aA/B+aB
Vamos a determinar por tanto esas dos componentes. Tendremos: aB=0.025N=0.025 · 75.44=1.886 m/s2
4.9=aB/A-0.0217N ⇒ aB/A=4.9+0.0217N=4.9+0.0217 · 75.44=6.537 m/s2 Ahora vamos a determinar la aceleración del bloque A. Tenemos en el gráfico dicha aceleración, que es suma vectorial de aB y aB/A. Tomando los ejes que aparecen en la figura: Eje X: aAX=aA/B-aBcos30º=6.537-1.886cos30º=4.904 m/s2
Eje Y: aAY=-aBsen30º=-1.886sen30º=0.943 m/s2 De modo que la aceleración del bloque es:
aA=4.904i-0.943j En módulo:
2222AY
2AXA s/m994.4943.0904.4aaa =+=+=
aA=4.994 m/s2 c) Y la aceleración de la cuña B ya la hemos determinado:
aB=1.886 m/s2
6. - Los bloques A y B pesan, respectivamente, 1 50 N y 300 N y están conectados mediante una cuerda como se indica en la figura. El coeficiente de rozamiento estático entre el bloque A y la superficie es de 0. 30 y el cinético es 0. 20. a) Determinar si el sistema puede iniciar el movimiento desde el reposo; b) en caso afirmativo, calcular la tensión en la cuerda y la aceleración de los bloques en el movimiento posterior; c) cuál es el peso mínimo del bloque B a partir del cual el
movimiento no es posible. a) Las masas de los bloques serán:
kg612.308.9
300gPm;kg306.15
8.9150
gPm B
BA
A ======
Supongamos que el sistema no inicia el movimiento. Con esta suposición la suma de fuerzas en cualquiera de las direcciones es nula, así que tendremos para el bloque A:
ΣFY=mAaAY ⇒ N-PA=0 ⇒ N=PA=150 N ΣFX=mAaAX ⇒2T-Fr=0 ⇒ Fr=2T
Para calcular la fuerza de rozamiento y saber si el bloque desliza o no necesitamos la tensión, de modo que

hacemos también el diagrama de sólido libre del bloque B. Para este bloque:
ΣFY=mBaBY ⇒ PB-3T=0 ⇒ N1003
3003PT B ===
Por tanto retomando el bloque A: Fr=2T=2 · 100=200 N
El bloque no desliza si la fuerza de rozamiento es inferior a la máxima, luego si nuestra suposición es correcta se verificará que:
Fr<(Fr)máx ⇒ Fr<µeN ⇒ 200<0.30 · 150 ⇒ 200<45 N Vemos que llegamos a un absurdo, lo que implica que la suposición que hemos hecho es incorrecta y el sistema sí que inicia el movimiento.
SÍ SE INICIA EL MOVIMIENTO b) Ahora ya sabemos que el sistema se mueve, luego los bloques tendrán aceleraciones aA y aB respectivamente, que no son iguales, pero que sí están relacionadas. Para obtener su relación antes de comenzar el problema, llamaremos xA a la posición en cada instante del bloque A y yB a la posición en cada instante del bloque B, como se indica en el gráfico. Puesto que ambos bloques se mueven en línea recta se verificará que:
BB
AA v
dtdy;v
dtdx
=−= ⇒ BB
AA a
dtdv;a
dtdv
==
Así, podemos expresar la longitud de la cuerda que une los dos bloques en función de las posiciones de los mismos:
LAB=2xA+3yB+ctes Puesto que la longitud de la cuerda es constante, su derivada respecto del tiempo es nula y tendremos:
BABABAAB v
23v0v3v20
dtdy3
dtdx20
dtdL
=⇒=+−⇒=+⇒=
Y derivando de nuevo respecto del tiempo:
BABA
BA a5.1adtdv
23
dtdvv
23v =⇒=⇒=
Ahora vamos a hacer como antes los diagramas de sólido libre de los dos bloques, pero teniendo en cuenta que ahora hay movimiento y por tanto aceleración. Para el bloque A:
ΣFY=mAaAY ⇒ N-PA=0 ⇒ N=PA=150 N Ahora sabemos que el bloque A desliza luego:
Fr=(Fr)máx=µcN=0.20 · 150=30 N Y para el otro eje:
ΣFX=mAaAX ⇒2T-Fr= mAaA ⇒ 2T-30=15.306aA Para el bloque B hacemos lo mismo:
ΣFY=mBaBY ⇒ PB-3T=mBaB ⇒ 300-3T=30.612aB Tenemos por tanto un sistema de tres ecuaciones y tres incógnitas, que es:
aA=1.5aB 2T-30=15.306aA

300-3T=30.612aB Sustituimos la primera ecuación en las otras dos:
2T-30=15.306aA ⇒ 2T-30=15.306 · 1.5aB ⇒ 2T-30=22.959aB
300-3T=30.612aB De la primera ecuación:
2T-30=22.959aB ⇒ T=11.4795aB+15 Y sustituyendo en la segunda:
300-3T=30.612aB ⇒ 300-3(11.4795aB+15)=30.612aB
300-34.4385aB-45=30.612aB ⇒ aB=3.92 m/s2 aB=3.92 m/s2
La tensión por tanto será: T=11.4795aB+15=11.4795 · 3.92+15=60 N
T=60 N Y la otra aceleración:
aA=1.5aB=1.5 · 3.92=5.88 m/s2 aA=5.88 m/s2
c) Para que el movimiento no sea posible tiene que verificarse, como en el primer apartado, que el sumatorio de todas las fuerzas sea nulo. Además, el bloque A no debe alcanzar la fuerza de rozamiento máxima, de modo que tendremos:
ΣFY=mAaAY ⇒ N-PA=0 ⇒ N=PA=150 N La fuerza de rozamiento debe ser inferior a la máxima luego la condición será:
Fr<(Fr)máx siendo la fuerza de rozamiento máxima:
(Fr)máx=µeN=0.30 · 150=45 N Por tanto:
Fr<(Fr)máx ⇒ Fr<45 N Del eje X podemos obtener la fuerza de rozamiento:
ΣFX=mAaAX ⇒2T-Fr=0 ⇒ Fr=2T ⇒ 2T<45 N ⇒ T<22.5 N Para que no exista movimiento la tensión debe ser inferior a 22.5 N. Si ahora vamos al bloque B:
ΣFY=mBaBY ⇒ PB-3T=0 ⇒ 3PT B=
Y sustituyendo en nuestra condición:
T<22.5 N ⇒ 5.223
gmN5.223P BB <⇒<
kg89.6m8.9
35.22mg
35.22m BBB <⇒⋅
<⇒⋅
<
mB<6.89 kg

7. - Un montacargas contiene tres bultos, según se indica en la figura. La masa de la caja del montacargas es de 750 kg y las masas de los bultos A, B y C son, respectivamente, 300 kg, 200 kg y 1 00 kg. Durante un corto intervalo de tiempo el montacargas experimenta una aceleración hacia arriba de 8 m/s2. Durante dicho intervalo, determinar: a) la tensión del cable del montacargas; b) la fuerza que el suelo del montacargas ejerce sobre A; c) la fuerza que B ejerce sobre C; d) dibuja los diagramas de sólido libre de los bloques A, B y C poniendo en ellos los valores de todas las fuerzas y comprobando que en todos se verifica correctamente la segunda ley de Newton.
a) El movimiento del sistema se
produce sólo en la dirección vertical, de modo que a este eje le denominaremos eje Y y tomaremos como sentido positivo el vertical hacia arriba. Trazamos en primer lugar el diagrama de sólido libre del ascensor completo, más los tres paquetes. Tendremos lo que aparece en la figura. Aplicando la segunda ley de Newton:
ΣFY=(mA+mB+mC+mM)aABCM 2T-(mA+mB+mC+mM)g=(mA+mB+mC+mM)a
( )( )=
++++=
2gammmm
T MCBA
( )( ) N120152
8.98750100200300=
++++=
T=12015 N b) Para determinar la fuerza que el suelo del montacargas ejerce sobre A
tenemos que eliminar el montacargas. Para ello realizamos el diagrama de sólido libre de los bloques A, B y C conjuntamente. Así, tendremos como fuerzas el peso de los tres, vertical y hacia abajo, y la reacción que ejerce el suelo sobre el bloque A, vertical y hacia arriba (reacción normal). La aceleración es para todos los bloques la misma ya que se mueven conjuntamente y manteniendo siempre el contacto. Aplicando la segunda ley de Newton:
ΣFY=(mA+mB+mC)aABC ⇒ NA-(mA+mB+mC)g=(mA+mB+mC)a NA=(mA+mB+mC)(a+g)=(300+200+100)(8+9.8)=10680 N
NA=10680 N c) Para conocer la fuerza que B ejerce sobre C tenemos que eliminar el bloque B, de modo que haremos el diagrama de sólido libre del bloque C. Las dos fuerzas que se ejercen sobre él son su peso, vertical y hacia abajo, y la normal que ejerce B sobre él, que será vertical y hacia arriba. La aceleración, como para los demás bloques, es de 8 m/s2 vertical y hacia arriba. Volvemos a aplicar la segunda ley de Newton:
ΣFY=mCaCY ⇒ NC-mCg=mCa NC=mC(g+a)=100(9.8+8)=1780 N

NC=1780 N d) El diagrama del bloque C ya lo tenemos. Nos faltan los bloques A y B. A continuación trazamos el diagrama del bloque B. Dicho bloque estará sometido a su peso, vertical y hacia abajo y a las reacciones que sobre él ejercen los dos bloques que estaban en contacto con él, los bloques A y C. La reacción de C sobre B será igual y de sentido contrario a la que ejercía B sobre C (principio de acción-reacción o tercera ley de Newton), es decir,
vertical y hacia abajo, y obviamente la reacción que ejerce A sobre B es una normal, vertical y hacia arriba. Así pues tenemos lo que aparece en la figura. De la aplicación de la segunda ley de Newton podemos obtener NB:
ΣFY=mBaBY ⇒ NB-NC-mBg=mBa ⇒ NB=mBa+mBg+NC= =200 · 8+200 · 9.8+1780=5340 N
Y por último nos faltaría trazar el diagrama de sólido libre del bloque A, en el cual todo está determinado y debería verificar la segunda ley de Newton. Si hacemos el diagrama de este bloque, tendríamos que está sometido a su peso, vertical y hacia abajo, a la reacción del suelo del ascensor (NA) vertical y hacia arriba, y a la reacción que ejerce B sobre A, que es
igual y de signo contrario a la que ejerce A sobre B, que ya hemos determinado y que hemos llamado NB. Así, tendremos lo que aparece en el gráfico. Podemos comprobar por último que la suma de todas las fuerzas es igual al producto de la masa del cuerpo por su aceleración. Nos quedaría:
ΣFY=NA-NB-mAg=10680-5340-300 · 9.8=2400 N mAaAY=mAa=300 · 8=2400 N
Podemos ver que efectivamente con los datos calculados se verifica la segunda ley de Newton en los tres bloques. Podríamos realizar la comprobación incluso con el montacargas solo, que aún no hemos aislado. Estaría sometido a su peso, a las tensiones de las cuerdas y a la reacción que ejerce el bloque que hemos eliminado (A) sobre él, que sería igual y de sentido contrario al que ejercía el montacargas sobre A, es decir, NA. Tal como nos queda el gráfico comprobamos que se cumple la segunda ley de Newton:
ΣFY=2T-NA-mMg= =2 · 12015-10680-750 · 9.8=6000 N
mMaMY=mMa=750 · 8=6000 N

8. - El bloque B (m=0. 5 kg) se mueve por una guía circular lisa en un plano vertical según se indica en la figura. Cuando el bloque se halla en la posición representada, su celeridad es de 20 m/s hacia arriba y hacia la izquierda. Si la longitud natural del resorte (k=25 N/m) es 300 mm, determinar la aceleración del bloque y la fuerza que sobre él ejerce la superficie de la guía. Vamos a determinar las condiciones geométricas del problema. Tendremos:
º02.57544.0790430cos =θ⇒==θ
La longitud del resorte en esta situación será: l=790senθ=790sen57.02º=662.72 mm
Tenemos pues que el resorte está alargado una cantidad: ∆l=l-l0=662.72-300=362.72 mm=0.36272 m
Ahora hacemos el diagrama de sólido libre del bloque. En cuanto a reacciones, tendremos el peso (vertical y hacia abajo), la normal (perpendicular a la tangente) y la reacción del resorte (que está estirado). Respecto a aceleraciones tendremos la normal y la tangencial, el sentido de esta última determinado por las fuerzas en dirección tangencial. Podemos ver que el bloque está frenando. De estas dos aceleraciones conocemos la normal,
que será: 2
22
n s/m33.506790.0
20va ==ρ
=
En el diagrama de sólido libre aplicamos la segunda ley de Newton: ΣFn=man ⇒ N+mgsenθ+k∆lsenθ=man
N+0.5 · 9.8sen57.02º+25 · 0.36272sen57.02º=0.5 · 506.33 ⇒ N=241.44 N N=241.44 N
ΣFt=mat ⇒ mgcosθ+k∆lcosθ=mat 0.5 · 9.8cos57.02º+25 · 0.36272cos57.02º=0.5at ⇒ at=15.21 m/s2
Por tanto la aceleración del bloque será: 2222
t2n s/m56.50621.1533.506aaa =+=+=
a=506.56 m/s2

9. - Los bloques A y B pesan 90 N cada uno, el C 62 N y el D 70 N. Sabiendo que al bloque D se le aplica una fuerza hacia abajo de 1 05 N, hallar: a) la aceleración de cada bloque; b) la tensión en la cuerda ABC. Se desprecian los pesos de las poleas y el efecto del rozamiento. a) En primer lugar y como en otros problemas, las aceleraciones de los bloques no son iguales, aunque están relacionadas. Denominaremos yA, yB, yC e yD a las posiciones en cada instante de los bloques A, B, C y D respectivamente. Así,
tendremos que:
BB
AA v
dtdy;v
dtdy
==
DD
CC v
dtdy;v
dtdy
=−=
Y si volvemos a derivar respecto del tiempo:
BB
AA a
dtdv;a
dtdv
==
DD
CC a
dtdv;a
dtdv
==
Ahora podemos expresar la longitud de la cuerda que une los bloques A, B y C como:
LABC=2yA+2yB+yC+ctes Derivando respecto del tiempo:
LABC=2yA+2yB+yC+ctes ⇒ CBACBA vv2v20
dtdy
dtdy2
dtdy20 −+=⇒++=
Y volviendo a derivar respecto del tiempo:
CBACBA
CBA aa2a20dtdv
dtdv2
dtdv20vv2v20 −+=⇒−+=⇒−+=
Del mismo modo, podemos expresar la longitud de la cuerda que une los bloques A, D y B como:
LADB=yD-yA+yD-yB+cte ⇒ LADB=2yD-yA-yB+cte Derivamos respecto del tiempo:
LADB=2yD-yA-yB+cte ⇒ BADBAD vv2v20
dtdy
dtdy
dtdy20 −−=⇒−−=
Y derivando otra vez respecto del tiempo:
BADBAD
BAD aaa20dtdv
dtdv
dtdv20vv2v20 −−=⇒−−=⇒−−=
Ahora vamos haciendo los diagramas de sólido libre de los bloques. Empezamos por el bloque C:
ΣFY=mCaCY ⇒ T-mCg=mCaC ⇒ CC a327.662Ta8.9
6262T =−⇒=−
A continuación aislamos el bloque B:
ΣFY=mBaBY ⇒ T’+mBg-2T=mBaB ⇒ Ba8.9
90T290'T =−+
Ba184.9T290'T =−+ Ahora aislamos el bloque D:

ΣFY=mDaDY ⇒ mDg+F-2T’=mDaD ⇒ Da8.9
70'T210570 =−+
175-2T’=7.143aD Y por último hacemos el diagrama de sólido libre del bloque A:
ΣFY=mAaAY ⇒ mAg+T’-2T=mAaA
⇒=−+ Aa8.9
90T2'T90 90+T’-2T=9.184aA
Si unimos las ecuaciones correspondientes a los cuatro bloques a las ecuaciones de las derivaciones de la
cuerda tenemos un sistema de seis ecuaciones y seis incógnitas: 0=2aA+2aB-aC 0=2aD-aA-aB
T-62=6.327aC T’+90-2T=9.184aB 175-2T’=7.143aD
90+T’-2T=9.184aA Sólo nos queda resolver. En primer lugar podemos ver que las
ecuaciones 4 y 6 tienen el primer miembro igual, luego el segundo también lo será: T’+90-2T=9.184aB 90+T’-2T=9.184aA
Deducimos por tanto que: 9.184aB=9.184aA ⇒ aB=aA
Nos queda entonces el sistema con cinco ecuaciones y cinco incógnitas: 0=2aA+2aB-aC ⇒ 0=2aA+2aA-aC ⇒ 0=4aA-aC 0=2aD-aA-aB ⇒ 0=2aD-aA-aA ⇒ 0=2aD-2aA
T-62=6.327aC 175-2T’=7.143aD
90+T’-2T=9.184aA De la segunda ecuación obtenemos:
0=2aD-2aA ⇒ aD=aA Y reducimos el sistema a cuatro ecuaciones y cuatro incógnitas:
0=4aA-aC T-62=6.327aC
175-2T’=7.143aD ⇒ 175-2T’=7.143aA 90+T’-2T=9.184aA
Ahora de la primera ecuación: 0=4aA-aC ⇒ aC=4aA
Y sustituimos en las otras tres: T-62=6.327aC ⇒ T-62=6.327 · 4aA ⇒ T-62=25.308aA
175-2T’=7.143aA 90+T’-2T=9.184aA
De la primera ecuación despejamos la tensión: T-62=25.308aA ⇒ T=62+25.308aA
Y sustituimos en las otras dos: 175-2T’=7.143aA
90+T’-2T=9.184aA ⇒ 90+T’-2(62+25.308aA)=9.184aA ⇒ 90+T’-124-50.616aA=9.184aA T’-34=59.80aA
Tenemos por tanto el sistema de dos ecuaciones y dos incógnitas: 175-2T’=7.143aA

T’-34=59.80aA De la segunda ecuación:
T’-34=59.80aA ⇒ T’=34+59.80aA Y sustituyendo en la primera:
175-2T’=7.143aA ⇒ 175-2(34+59.80aA)=7.143aA ⇒ 175-68-119.60aA=7.143aA 107=126.743aA ⇒ aA=aB=aD=0.844 m/s2
aA=aB=aD=0.844 m/s2 Y la otra aceleración:
aC=4aA=4 · 0.844=3.377 m/s2 aC=3.377 m/s2
b) Y la tensión en la cuerda: T=62+25.308aA=62+25.308 · 0.844=83.360 N
T=83.360 N
1 0. - Una bolita de masa 0. 50 kg está montada en el aro de la figura y puede girar libremente (rozamiento despreciable) sobre él cuando éste gire. Determinar el ángulo θ y la fuerza F que el aro ejerce sobre la bola cuando aquél gire en torno a un diámetro vertical con una velocidad angular constante igual a 1 20 rpm.
Pasamos la velocidad angular al sistema internacional:
ω=120 rpm=12.566 rad/s A continuación hacemos el diagrama de sólido libre de la bolita. Sobre ella sólo actúan dos fuerzas, el peso y la reacción de la barra, que será perpendicular a la tangente en el punto de contacto. Y en cuanto a aceleraciones, puesto que el movimiento es circular y uniforme, la única aceleración que tenemos será normal, en la
dirección del radio de curvatura y apuntando hacia el centro de curvatura. Aplicamos la segunda ley de Newton y tendremos:
ΣFX=maX ⇒ Fsenθ=ma ⇒ Fsenθ=mω2ρ ⇒ Fsenθ=mω2Rsenθ F=mω2R=0.5 · 12.5662 · 0.15=11.844 N
F=11.844 N
ΣFY=maY ⇒ Fcosθ-mg=0 ⇒ º561.65414.0844.11
8.95.0F
mgcos =θ⇒=⋅
==θ
θ=65.561º

1 1 . - Una caja descansa sobre una correa transportadora inicialmente en reposo. Se arranca la correa y se mueve hacia la izquierda durante 1 . 3 s con una aceleración constante de 2 m/s2. A continuación, la correa
comienza a moverse con una deceleración constante a2 y se detiene tras recorrer un total de 2. 2 m. Sabiendo que los coeficientes de rozamiento estático y dinámico entre la caja y la correa son, respectivamente, µe=0. 35 y µc=0. 25 hallar: a) la deceleración a2 de la correa; b) el desplazamiento de la caja respecto a la correa cuando ésta se detiene.
a) El movimiento se va a dividir en dos partes, cuando la aceleración de la correa es
a1 y cuando es a2. Comencemos con el primer intervalo. Durante 1.3 s la correa parte del reposo y se mueve con aceleración constante. Teniendo en cuenta que el movimiento es rectilíneo y uniforme podemos determinar el espacio x1 recorrido:
m69.13.1221ta
21tvxx 22
111001 =⋅=++=
En la primera parte del movimiento la correa se desplaza 1.69 m, y termina con una velocidad que es:
v1=v01+a1t1=2 · 1.3=2.6 m/s Ahora pasamos a la segunda parte del movimiento, el tramo 2. Como el movimiento es rectilíneo uniformemente acelerado podemos aplicar las ecuaciones del espacio y la velocidad:
2222
222202022 ta
21t6.269.12.2ta
21tvxx −+=⇒−+=
v2=v02-a2t2 ⇒ 0=2.6-a2t2 De la segunda ecuación:
0=2.6-a2t2 ⇒ a2t2=2.6 Y sustituyendo en la primera:
s392.0tt3.151.0t6.221t6.269.12.2ta
21t6.269.12.2 2222
2222 =⇒=⇒−+=⇒−+=
Y ya podemos obtener la aceleración a2: a2t2=2.6 ⇒ 0.392a2=2.6 ⇒ a2=6.627 m/s2
a2=6.627 m/s2 b) Veamos ahora qué ocurre con la caja en estos dos intervalos de tiempo. Comenzamos como antes con el intervalo 1. En primer lugar tendremos que determinar si la caja desliza o no respecto de la correa. Supongamos que la caja no desliza respecto de la correa. En este caso, la fuerza de rozamiento es inferior a la máxima estática:
Fr≤(Fr)máx ⇒ Fr≤µeN Hacemos el diagrama de sólido libre de la caja, que si suponemos que no desliza respecto de la correa, se mueve con su misma aceleración a1=2 m/s2. Tendremos lo que aparece en la figura. Aplicando la segunda ley de Newton:
ΣFY=maY ⇒ N-mg=0 ⇒ N=mg ΣFX=maX ⇒ Fr=ma1
Comprobamos a continuación que efectivamente la caja no desliza respecto de la correa: Fr≤µeN ⇒ ma1≤µeN ⇒ ma1≤µemg ⇒ a1≤µeg ⇒ 2≤0.35 · 9.8 ⇒ 2≤3.43

Vemos que el resultado es correcto, luego durante el primer intervalo de tiempo la caja no desliza respecto de la correa y por tanto ambos sistemas recorren el mismo espacio, con la misma velocidad e igual aceleración.
Pasamos entonces al tramo 2, y tendremos que hacer lo mismo. Vemos si en este tiempo la caja desliza respecto de la correa. Suponemos inicialmente lo mismo que antes, que la caja no desliza respecto de la correa, de modo que tendremos las mismas condiciones: la fuerza de rozamiento es inferior a la máxima (Fr≤µeN) y la aceleración de la caja es la misma que la de la correa (a2). Tendremos un diagrama de sólido libre similar, sólo que el sentido de la aceleración (y por tanto el de la fuerza de rozamiento) cambia puesto que la
correa decelera. Operando de igual modo que antes: ΣFY=maY ⇒ N-mg=0 ⇒ N=mg
ΣFX=maX ⇒ Fr=ma2 Comprobamos a continuación que efectivamente la caja no desliza respecto de la correa:
Fr≤µeN ⇒ ma2≤µeN ⇒ ma2≤µemg ⇒ a2≤µeg ⇒ 6.627≤0.35 · 9.8 ⇒ 6.627≤3.43 El resultado a que llegamos es absurdo, luego nuestra suposición es incorrecta, y la caja desliza durante este segundo intervalo respecto de la correa, recorriendo los dos sistemas espacios diferentes. Ahora la aceleración de la caja no es a2, sino que es una aceleración diferente que llamaremos a, y la fuerza de rozamiento, puesto que desliza, es la cinética:
Fr=µcN El diagrama de sólido libre de la caja es como antes pero con estos nuevos parámetros. Obviamente, cuando la correa frena la caja desliza respecto de la correa hacia la izquierda, luego la fuerza de rozamiento será hacia la derecha (sentido opuesto al deslizamiento). Del diagrama podemos obtener la aceleración a de la caja:
ΣFY=maY ⇒ N-mg=0 ⇒ N=mg ΣFX=maX ⇒ Fr=ma ⇒ µcN=ma ⇒ µcmg=ma
a=µcg=0.25 · 9.8=2.45 m/s2 Ahora durante este intervalo que dura 0.392 s el movimiento de la caja es rectilíneo uniformemente acelerado, parte con velocidad inicial de 2.6 m/s (la final del tramo anterior, en el que el movimiento era el mismo que el de la correa), y ha recorrido un espacio inicial de 1.69 m. Tendremos por tanto que el espacio recorrido por la caja es:
m521.2392.045.221392.06.269.1at
21tvxx 22
22caja0caja0caja =⋅−⋅+=−+=
Tenemos por tanto que la correa recorre 2.2 m y la caja recorre 2.521 m, luego el espacio recorrido por la caja respecto de la correa será:
xcaja/correa=xcaja-xcorrea=2.521-2.2=0.321 m xcaja/correa=0.321 m

1 2. - Una corredera de 2 kg que puede deslizar por una guía vertical lisa está sometida a una fuerza P cuya intensidad varía como se muestra. Sabiendo que inicialmente está en reposo, hallar su velocidad en: a) t=2 s; b) t=3 s; c) si P deja de aplicarse en t=3 s, hallar el instante en que la velocidad se anula.
a) A lo largo de todo el movimiento la corredera está sometida a dos fuerzas, la fuerza P, vertical y hacia arriba, y el peso, vertical y hacia abajo. Desde t=0 hasta t=2 la ecuación de la fuerza P es:
P=bt siendo la pendiente:
s/N252
50tgb ==α=
Por tanto en este intervalo la ecuación de la fuerza P es: P=bt=25t
Aplicando el teorema del impulso: ( ) ( ) ∫=∫ ⋅−⇒∫=∫ −⇒∫=∫⇒=Σ Y2Y2Y2 v
0 Y20
v0 Y
20
v0 Y
20 YYY dv2dt8.92t25mdvdtmgPmdvdtFmdvdtF
( ) ] Y2Y2 v0Y
2
0
2v0 Y
20 v2t6.19
2t25dv2dt6.19t25 =
−⇒∫=∫ −
s/m4.5vv226.192225
Y2Y2
2=⇒=⋅−
⋅
v2Y=5.4 m/s b) Para 2<t<3 s la fuerza P vale 50 N luego tendremos:
( ) ( ) ∫=∫ ⋅−⇒∫=∫ −⇒∫=∫⇒=Σ Y3Y3Y3Y2
v4.5 Y
32
v4.5 Y
32
vv Y
32 YYY dv2dt8.9250mdvdtmgPmdvdtFmdvdtF
] ] s/m6.20v)4.5v(2)23(4.30v2t4.30dv2dt4.30 Y3Y3v
4.5Y32
v4.5 Y
32
Y3Y3 =⇒−=−⇒=⇒∫=∫
v3Y=20.6 m/s c) Por último, para t>3 s P se anula luego nos queda:
∫=∫ ⋅−⇒∫=∫ −⇒∫=∫⇒=Σ 06.20 Y
t3
06.20 Y
t3
0v Y
t3 YYY dv2dt8.92mdvmgdtmdvdtFmdvdtF
Y3
( ] ] s10.5t6.202)3t(6.19v2t6.19dv2dt6.19 06.20Y
t3
06.20 Y
t3 =⇒⋅−=−−⇒=−⇒∫=∫ −
t=5.10 s
1 3. - El triple salto es una prueba atlética en la que el atleta toma impulso corriendo e intenta saltar lo más lejos posible con un brinco, una zancada y un salto.
En las figuras se representan el brinco inicial y el salto final donde aterriza en un foso de arena. Si el peso del atleta es de 85 kg y suponiendo que se acerca a la línea de impulso con la velocidad mostrada en la figura (1 0 m/s) que se mantiene en

contacto con el suelo durante 0. 1 8 s y despega bajo un ángulo de 50º con una velocidad de 1 2 m/s y que en el salto final, en el instante de aterrizar en el foso, lleva una velocidad de 9 m/s formando un ángulo de 35º con la horizontal y tarda 0. 22 s en detenerse por completo, hallar la componente vertical de la fuerza impulsiva media que el suelo le ejerce en el pié en el brinco y la componente horizontal de la fuerza impulsiva media que se ejerce sobre sus pies en el aterrizaje.
Empezamos por el brinco. Aplicamos el teorema del impulso al eje Y y nos queda:
∫=∫ −⇒∫=∫⇒=Σ º50sen120 Y
18.00 Y
º50sen120 Y
18.00 YYY mdvdt)mgF(mdvdtFmdvdtF
∫=∫ −⇒∫=∫ ⋅− º50sen120 Y
18.00 Y
º50sen120 Y
18.00 Y dv85dt)833F(dv85dt)8.985F(
] ] N92.5173Fº50sen128518.0)833F(v85t)833F( YYº50sen12
0Y18.0
0Y =⇒⋅=−⇒=− FY=5173.92 N
Ahora hacemos lo mismo en el aterrizaje pero en el eje X: ∫=∫⇒∫=∫⇒=Σ 0
º35cos9 X22.0
0 X0
º35cos9 X22.0
0 XXX dv85dtFmdvdtFmdvdtF ] ] N42.2848Fº35cos985F22.0v85tF XX
0º35cos9X
22.00X −=⇒⋅−=⇒=
El signo negativo es porque la fuerza tiene sentido contrario a la velocidad, lo cual es lógico, ya que el atleta está frenando.
FX=2848.42 N
1 4. - Una caja de 1 0 kg descansa sobre una superficie horizontal según se indica en la figura y se le aplica una fuerza horizontal P. El módulo de P varía con el tiempo según se indica en la figura inferior. Si los coeficientes de rozamiento estático y dinámico valen 0. 4 y 0. 3 respectivamente, determinar: a) la velocidad de la caja en t=1 0 s; b) la velocidad de la caja en t=1 5 s; c) el tiempo tf para el cual la caja deja de deslizar. a) Tendremos el diagrama de sólido libre que aparece al
lado. Teniendo en cuenta que el movimiento se produce solamente a lo largo del eje X tendremos:
ΣFY=maY ⇒ N-mg=0 ⇒ N=mg=10 · 9.8=98 N Ahora tenemos que tener en cuenta que inicialmente la caja no se mueve, porque el rozamiento es suficiente para evitar el deslizamiento. No habrá movimiento mientras la fuerza de rozamiento sea inferior a la fuerza de rozamiento máxima estática, que será:
(Fr)e=µeN=0.4 · 98=39.2 N A partir de t=0 y hasta t=10 s la fuerza P aumenta siguiendo la ecuación
P=bt siendo b la pendiente de la recta, es decir:
s/N51050tgb ==α=
Por tanto durante este tiempo la fuerza P vale P=bt=5t. Calculemos el tiempo en que esta fuerza alcanza a la fuerza de rozamiento estática:
P=(Fr)e ⇒ 5t=39.2 ⇒ t=7.84 s

Por tanto el movimiento de la caja empieza en t=7.84 s. A partir de este instante, la fuerza de rozamiento pasa a tener el valor cinético, que es:
Fr=µcN=0.3 · 98=29.4 N En el intervalo 7.84<t<10 s (que es el intervalo en que la fuerza P=5t) aplicamos el teorema del impulso:
∫=∫ −⇒∫=∫⇒=Σ 1010 v0 X
1084.7 r
v0 X
1084.7 XXX dv10dt)FP(mdvdtFmdvdtF
] 1010 v0X
10
84.7
2v0 X
1084.7 v10t4.29
2t5dv10dt)4.29t5( =
−⇒∫=∫ −
s/m28.3vv1084.74.29284.75104.29
2105
1010
22=⇒=⋅+
⋅−⋅−
⋅
v10=3.28 m/s b) Desde t=10 s hasta t=15 s la fuerza P es constante y vale 50 N luego ahora tendremos:
∫=∫ −⇒∫=∫⇒=Σ 151510
v28.3 X
1510 r
vv X
1510 XXX dv10dt)FP(mdvdtFmdvdtF
] ] 151515 v28.3X
1510
v28.3 X
1510
v28.3 X
1510 v10t6.20dv10dt6.20dv10dt)4.2950( =⇒∫=∫⇒∫=∫ −
20.6(15-10)=10(v15-3.28) ⇒ v15=13.58 m/s v15=13.58 m/s
c) Entre t=15 s y t=25 s la fuerza P es constante de nuevo y vale P=25 N, con lo cual tendremos:
∫=∫ −⇒∫=∫⇒=Σ 252515
v58.13 X
2515 r
vv X
2515 XXX dv10dt)FP(mdvdtFmdvdtF
] ] 252525 v58.13X
2515
v58.13 X
2515
v58.13 X
2515 v10t4.4dv10dt4.4dv10dt)4.2925( =−⇒∫=∫−⇒∫=∫ −
-4.4 (25-15)=10(v25-13.58) ⇒ v25=9.18 m/s A partir de aquí la fuerza P se hace nula y actúa sólo la fuerza de rozamiento cinética, hasta que el bloque se detiene. En esta última parte por tanto:
∫=∫ −⇒∫=∫⇒=Σ 018.9 X
t25 r
0v X
t25 XXX dv10dtFmdvdtFmdvdtF f
25f
] ] s12.28t18.910)25t(4.29v10t4.29dv10dt4.29 ff0
18.9Xt25
018.9 X
t25
ff =⇒⋅−=−−⇒=−⇒∫=∫ −
tf=28.12 s
1 5. - Una partícula de 730 g tiene una velocidad de 3 m/s en la dirección indicada en el plano horizontal XY, y encuentra un flujo continuo de aire en la dirección Y para t=0. Si la componente y de la fuerza ejercida sobre la partícula por el aire es constante e igual a 0. 44 N, determinar el tiempo t que necesita la partícula para cruzar de nuevo el eje fijo de las X.
Cuando vuelva a cruzar el eje de las X la componente vertical de la velocidad será igual a la inicial y de sentido contrario, por lo que en el eje Y inicialmente la velocidad es v0Y=-3sen30º y la velocidad final será vY=3sen30º. Aplicamos el teorema del impulso al eje Y:
] ] º30sen3º30sen3Y
t0
º30sen3º30sen3 Y
t0
vv Y
t0 YYY v73.0t44.0dv73.0dt44.0mdvdtFmdvdtF Y
Y0 −− =⇒∫=∫⇒∫=∫⇒=Σ
s98.4t)º30sen3º30sen3(73.0t44.0 =⇒+= t=4.98 s

1 6. - Un disco de 2 kg se desliza por una superficie horizontal lisa cuando sobre él se ejerce una fuerza transversal (ver figura izquierda). Ésta forma un ángulo θ con la dirección inicial de v y su módulo varía según se indica en la figura de la derecha. Si v=1 0 m/s y θ=50º , determinar el módulo, dirección
y sentido de la velocidad del disco cuando: a) t=5 s; b) t=1 0 s; c) t=1 5 s. a) En el intervalo de tiempo 0<t<5 s la fuerza F tiene una expresión del tipo F=bt
siendo s/N2.156b == . Así, la expresión de F en este intervalo es F=bt=1.2t.
Aplicamos el teorema del impulso al eje X: ∫=∫⇒∫=∫ θ⇒=Σ X5X5 v10 X
50
v10 X
50XX dv2dtº50cost2.1mdvdtcosFmdvdtF
] s/m821.14v)10v(2º50cos2
52.1v2º50cos2t2.1
X5X5
2v10X
5
0
2X5 =⇒−=
⋅⇒=
Y hacemos lo mismo con el eje Y: ∫=∫⇒∫=∫ θ⇒=Σ Y5Y5 v0 Y
50
v0 Y
50YY dv2dtº50tsen2.1mdvdtFsenmdvdtF
] s/m745.5vv2º50sen2
52.1v2º50sen2t2.1
Y5Y5
2v0Y
5
0
2Y5 =⇒=
⋅⇒=
Por tanto la velocidad en t=5 s es: v5=v5Xi+v5Yj=14.821i+5.745j m/s
v5=14.821i+5.745j m/s b) Vamos ahora a t=10 s. Para el intervalo 5<t<10 s la fuerza F tiene una expresión
del tipo F=a-bt siendo s/N8.159b == . Para determinar la ordenada en el origen (a),
podemos tener en cuenta que un punto de la recta es el (5, 6), de modo que: F=a-bt=a-1.8t ⇒ Para t=5 s ⇒ F=6 N ⇒ 6=a-1.8 · 5 ⇒ a=15 N
Entonces en el intervalo de tiempo 5<t<10 s la fuerza F vale F=a-bt=15-1.8t. Aplicamos de nuevo el teorema del impulso, primero al eje X:
∫=∫ −⇒∫=∫ θ⇒=Σ X10X10 v821.14 X
105
v821.14 X
105XX dv2dtº50cos)t8.115(mdvdtcosFmdvdtF
] X10v821.14X
10
5
2v2º50cos
2t8.1t15 =
−
s/m231.17v)821.14v(2º50cos2
58.15152108.11015 X10X10
22=⇒−=
⋅+⋅−
⋅−⋅
Y para el eje Y: ∫=∫ −⇒∫=∫ θ⇒=Σ Y10Y10 v
745.5 Y105
v745.5 Y
105YY dv2dtº50sen)t8.115(mdvdtFsenmdvdtF
] Y10v745.5Y
10
5
2v2º50sen
2t8.1t15 =
−
s/m618.8v)745.5v(2º50sen2
58.15152108.11015 Y10Y10
22=⇒−=
⋅+⋅−
⋅−⋅
Para t=10 s la velocidad es: v10=v10Xi+v10Yj=17.231i+8.618j m/s
v10=17.231i+8.618j m/s

c) Por último, en el intervalo 10<t<15 s la fuerza F es del tipo F=a+bt siendo
s/N6.053b == . La ordenada en el origen la obtenemos sabiendo que la recta pasa por el
punto (15, 0) luego tendremos: F=a+bt=a+0.6t ⇒ Para t=15 s ⇒ F=0 ⇒ 0=a+0.6 · 15 ⇒ a=-9 N
La fuerza F en este intervalo tiene por ecuación F=a+bt=-9+0.6t. Aplicamos de nuevo el teorema del impulso y en el eje X:
∫=∫ +−⇒∫=∫ θ⇒=Σ X15X15 v231.17 X
1510
v231.17 X
1510XX dv2dtº50cos)t6.09(mdvdtcosFmdvdtF
] X15v231.17X
15
10
2v2º50cos
2t6.0t9.0 =
+−
s/m837.27v)231.17v(2º50cos2106.0109.0
2156.0159.0 X15X15
22=⇒−=
⋅−⋅+
⋅+⋅−
Y por último en el eje Y: ∫=∫ +−⇒∫=∫ θ⇒=Σ Y15Y15 v
618.8 Y1510
v618.8 Y
1510YY dv2dtº50sen)t6.09.0(mdvdtFsenmdvdtF
] Y15v618.8Y
15
10
2v2º50sen
2t6.0t9.0 =
+−
s/m258.21v)618.8v(2º50sen2106.0109.0
2156.0159.0 Y15Y15
22=⇒−=
⋅−⋅+
⋅+⋅−
Para t=15 s la velocidad es: v15=v15Xi+v15Yj=27.837i+21.258j m/s
v15=27.837i+21.258j m/s
1 7. - Dos estaciones espaciales S1 y S2 recorren en sentido antihorario órbitas coplanarias en torno a la Tierra, de radios r0=7000 km y 8r0 respectivamente. 1 º ) Se desea enviar un vehículo desde S1 hasta S2 y para ello ha de ser lanzado tangencialmente a la órbita de S1 y ha de alcanzar a S2 con una velocidad tangente a la órbita de ésta. Tras un período muy corto de vuelo propulsado, el vehículo irá en vuelo libre desde S1 hasta S2. a) Determinar la velocidad de lanzamiento del vehículo (velocidad relativa a S1); b) determinar el ángulo θ que define la posición a ocupar por S2 en el
momento del lanzamiento; 2º ) inmediatamente después de que S1 lance el vehículo, se pretende hacer regresar a la Tierra dicha estación espacial disminuyendo su velocidad de forma prácticamente instantánea. De esta forma se inicia una trayectoria elíptica de acercamiento a al Tierra, trayectoria cuyo apogeo es el mismo punto en que S1 lanzó el vehículo. Determinar la velocidad de aterrizaje, si el ángulo que define el punto en que aquél se produce es de 45º . 1ºa) Los radios de las dos órbitas circulares son:
r0=7000 km; 8r0=8 · 7000=56000 km El vehículo debe lanzarse en el punto 1 y recorrer una órbita elíptica de eje mayor:
2a=r1+r2=r0+8r0=9r0=9 · 7000=63000 km Como en esta órbita la energía es constante tendremos:

0
21
1
211P1CT r
MGv21
a2MG
rMmGmv
21
a2MmGEEcteE −=−⇒−=−⇒+==
s/m57.10081v107000
1061067.6v21
10630001061067.6 13
24112
13
2411 =⇒
⋅⋅
⋅−=⋅
⋅⋅− −−
Antes del lanzamiento la estación espacial S1 estaba en una órbita circular, luego su velocidad v era:
s/m18.7561107000
1061067.6r
GMvrvm
rMmGmaF 3
2411
00
2
20
nG =⋅
⋅⋅⋅==⇒=⇒=
−
Por tanto la velocidad relativa: vrel=v1-v=10081.57-7561.18=2520.40 m/s
vrel=2520.40 m/s 1ºb) Las estaciones S1 y S2 salen simultáneamente de los puntos marcados en la figura, y tienen que llegar a la vez al punto de encuentro. Por tanto tiene que tardar lo mismo S1 en recorrer media órbita que S2 en recorrer el ángulo θ. Si nos centramos en S1 calcular ese tiempo es sencillo, ya que como se recorre media órbita por la ley de las áreas el tiempo invertido será medio periodo. Así pues tendremos:
s69.277632
10630001061067.6
421a
GM4
21
2Tt
33
2411
23
21 =
⋅⋅⋅⋅
π=
π== −
Si vamos a S2, que recorre en ese tiempo el ángulo θ de una órbita circular de radio 8r0:
º94.75rad325.169.2776310700081070008
1061067.6
tr8r8
GM
tr8
vtt 3
3
2411
0
0
0
222 ==
⋅⋅⋅⋅⋅⋅⋅
===ω=θ⇒θ
=ω
−
θ=75.94º 2º) Ahora tenemos una órbita de aterrizaje distinta de las anteriores. En ella marcamos los puntos A y P (apogeo y perigeo). Evidentemente al perigeo no se llega porque antes la estación choca con la Tierra en el punto C, situado a 45º. El perigeo entonces estaría en el interior de la Tierra. Conocemos el apogeo, que mide:
rA=r0=7000 km No conocemos aún el perigeo. Para determinarlo lo
mejor será utilizar la ecuación de la cónica, que es:
θε+α
=cos1
r
Conocemos dos puntos de la cónica. El primero es el apogeo:
r=rA ⇒ θ=180º ⇒ cosθ=-1 ⇒ ε−
α=⇒
θε+α
=1
rcos1
r A
r=RT ⇒ θ=-45º ⇒ cosθ=0.707 ⇒ ε+
α=⇒
θε+α
=707.01
Rcos1
r T
Dividiendo las dos expresiones:
ε−ε+
=⇒ε−
ε+=⇒
ε+αε−
α
=1
707.0163707000
1707.01
Rr
707.01
1Rr
T
A
T
A
7000-7000ε=6370+4504.27ε ⇒ ε=0.05476 La ascensión recta será:
km664.661605476.01
70001
rA =α⇒−
α=⇒
ε−α
=
Por tanto la ecuación de la cónica es:
θ+=
θε+α
=cos05476.01
664.6616cos1
r
Podemos determinar el perigeo, ya que en el perigeo θ=0º y por tanto cosθ=1:
km15.627305476.01
664.6616cos05476.01
664.6616rrr PP =+
=θ+
=⇒=
Vemos que es inferior al radio terrestre, como hemos explicado antes. Ahora, aplicando el teorema de conservación de la energía al punto de aterrizaje:
T
2at
PAT
2atPCCCT R
MGv21
rrMG
RMmGmv
21
'a2MmGEEcteE −=
+−⇒−=−⇒+==
s/m89.8083v106370
1061067.6v21
10)15.62737000(1061067.6 at3
24112
at3
2411 =⇒
⋅⋅
⋅−=⋅+
⋅⋅− −−
vat=8083.89 m/s
1 8. - Un cohete se observa desde la Tierra a 1 4000 km del centro de ésta, con una velocidad de 28000 km/h. El ángulo entre los vectores posición (medido desde el centro de la Tierra) y velocidad es de 41 º . a) Determinar el tipo de órbita que está describiendo el cohete, su energía total y su momento angular. En su recorrido posterior y a una distancia de 1 0000 km del centro de la Tierra se quiere que pase a una órbita elíptica en torno a la misma. Para ello se encienden los motores de forma que su velocidad pasa a ser 1 6000 km/h y se inclina la nave de forma que en dicha posición el ángulo entre los vectores posición (medido respecto a la Tierra) y velocidad es de 28º . Determinar: b) el incremento de velocidad que ha sido necesario comunicar a la nave en dicho punto; c) la velocidad de la nave en el perigeo y apogeo de la nueva órbita elíptica; d) el semieje mayor de dicha órbita elíptica y la ecuación de la misma: e) el ángulo al que se produciría el choque del cohete con la Tierra si se le dejase continuar en esta órbita elíptica.
a) La energía total es la suma de la cinética más la potencial. Podemos obtenerla a
falta de la masa del vehículo, que denominaremos m. La velocidad del vehículo en el Sistema Internacional es:
v=28000 km/h=7777.78 m/s Por tanto la energía total es:
=−=+==r
MmGmv21EEcteE 2
PCT
Jm295.16611991014000m1061067.678.7777m
21
3
24112 =
⋅⋅
⋅−⋅= −
ET=1661199.295m J Como la energía total es positiva se trata de una órbita hiperbólica.
Órbita hiperbólica Y el momento angular en módulo:
L=rmvsenϕ=14000 · 103 m · 7777.78sen41º=7.144 · 1010m kgm2/s L=7.144 · 1010m kgm2/s
b) Vamos a ver en primer lugar qué velocidad llevaba el cohete cuando llega a la posición r’=10000 km antes de encenderse los motores. Para ello aplicamos la conservación de la energía y tendremos:

'rMmG'mv
21E'E'EcteE 2
TPCT −=⇒+== ⇒ 3
24112
1010000m1061067.6'mv
21m295.1661199
⋅⋅
⋅−= −
s/m30.9130'v1010000
1061067.6'v21295.1661199 3
24112 =⇒
⋅⋅
⋅−= −
Tras encender los motores la velocidad pasa a ser v’’=16000 km=4444.44 m/s. Por tanto el incremento de velocidad es:
∆v=v’’-v’=4444.44-9130.30=-4685.86 m/s ∆v=-4685.86 m/s
c) Conocemos el momento angular en la nueva órbita, que será: L’’=r’’mv’’senϕ’’=10000 · 103 m · 4444.44sen28º=2.0865 · 1010m kgm2/s
Y sabemos también la energía total:
Jm79.301434561010000m1061067.644.4444m
21
''rMmG''mv
21''E''E''E 3
241122
CT −=⋅
⋅⋅−⋅=−=+= −
Obtenemos una energía total negativa, como corresponde a una órbita elíptica. Ahora en esta órbita se conserva tanto el momento angular como la energía total. Así, aplicamos la conservación de estos dos parámetros al apogeo y tendremos:
L’’=cte=rAmvAsenϕA ⇒ 2.0865 · 1010m=rAmvAsen90º ⇒ 2.0865 · 1010=rAvA
A
2ATPACATT r
MmGmv21''E''E''E''Ecte''E −=⇒+=⇒=
A
24112
AA
24112
A r1061067.6v
2179.30143456
rm1061067.6mv
21m79.30143456 ⋅
⋅−=−⇒⋅
⋅−=− −−
Tenemos un sistema de dos ecuaciones y dos incógnitas: 2.0865 · 1010=rAvA
A
24112
A r1061067.6v
2179.30143456 ⋅
⋅−=− −
De la primera ecuación:
2.0865 · 1010=rAvA ⇒ A
10
A v100865.2r ⋅
=
Y sustituimos en la segunda:
A
24112
A r1061067.6v
2179.30143456 ⋅
⋅−=− −
10A
24112
A 100865.2v1061067.6v
2179.30143456
⋅⋅
⋅−=− − ⇒ 058.60286913v89.38360v A2A =+−
=⋅−±
=s/m84.1641s/m05.36719
258.60286913489.3836089.38360v
2
A
Los dos resultados corresponden a las velocidades del apogeo y el perigeo, puesto que si hubiéramos aplicado las dos expresiones (energía total y momento angular) al perigeo habríamos obtenido idénticas ecuaciones. Así, la velocidad mayor se corresponderá a la menor distancia (perigeo) puesto que se conserva el momento angular, y la velocidad menor se corresponde con la distancia mayor (apogeo):
vA=1641.84 m/s vP=36719.05 m/s
d) A partir de la velocidad en el apogeo obtenemos la distancia en dicho punto:
km30.12708m88.1270830284.1641100865.2
v100865.2r
10
A
10
A ==⋅
=⋅
=
Como el momento angular es constante podemos poner también: L’’=cte=rPmvPsenϕP ⇒ 2.0865 · 1010m=rPmvPsen90º ⇒ 2.0865 · 1010=rPvP

km23.568m66.56823305.36719100865.2
v100865.2r
10
P
10
P ==⋅
=⋅
=
El semieje mayor de la órbita será:
km27.66382
23.56830.127082
rra PA =+
=+
=
a=6638.27 km La ecuación de la cónica es del tipo:
θε+α
=cos1
r
donde habrá que determinar las dos constantes α y ε. Para ello necesitamos dos ecuaciones, pero conocemos dos puntos de la trayectoria, el perigeo y el apogeo. Tendremos entonces:
ε+α
=⇒ε+
α=⇒=θ⇒=θ⇒=
123.568
1r1cosº0rr PP
ε−α
=⇒ε−
α=⇒−=θ⇒=θ⇒=
130.12708
1r1cosº180rr AA
Dividiendo las dos expresiones:
9144.023.56830.1270823.56830.12708
rrrr)1(r)1(r
11
rr
1
1rr
PA
PAAP
A
P
A
P =+−
=+−
=ε⇒ε−=ε+⇒ε+ε−
=⇒
ε−αε+
α
=
Y de cualquiera de las expresiones obtenemos la ascensión recta:
km82.1087)9144.01(23.568)1(23.5681
23.568 =+=ε+=α⇒ε+
α=
Por tanto la ecuación de la cónica es:
θ+=
θε+α
=cos9144.01
82.1087cos1
r
θ+=
cos9144.0182.1087r
e) Para el punto de aterrizaje r=RT luego:
θ+=⇒
θ+=⇒
θ+=
cos9144.0182.10876370
cos9144.0182.1087R
cos9144.0182.1087r T
cosθ=-0.9068 ⇒ θ=155.07º θ=155.07º
1 9. - Se pretende colocar una sonda espacial en una órbita circular de 4000 km de radio alrededor de Marte. Para ello cuando la sonda llega a A, punto de su trayectoria de aproximación más cercano a Marte, se inserta primero en una órbita elíptica de transferencia reduciendo su velocidad en
∆vA. Esta órbita la lleva hasta el punto B con una velocidad muy reducida. Ahí la sonda es insertada en una segunda órbita de transferencia reduciendo su velocidad en ∆vB. Finalmente cuando llega al punto C se introduce en la órbita circular deseada reduciendo su velocidad en ∆vC. Sabiendo que rA=9000 km, que ∆vA=440 m/s y que la

sonda se aproxima a A siguiendo una trayectoria parabólica, hallar: a) la distancia rB del centro de Marte al punto B; b) el incremento de velocidad ∆vB; c) el tiempo que tarda la sonda en pasar de A hasta B en su primera órbita de transferencia; d) el incremento de velocidad ∆vC; e) la ecuación de la segunda órbita de transferencia. M=6. 444 · 1 023 kg.
a) La trayectoria de aproximación es parabólica, luego la energía en esta órbita tiene que ser nula. Con ello, podemos determinar la velocidad de la nave al llegar al punto A:
==⇒=−⇒=+⇒=A
AA
2APgACAiónTaproximac r
GM2v0rMmGmv
210EE0E
s/m54.3090109000
10444.61067.623
2311=
⋅
⋅⋅⋅⋅=
−
En el punto A la velocidad de la sonda se reduce en ∆vA para situarla en la primera órbita de transferencia, de modo que tendremos:
v’A=vA-∆vA=3090.54-440=2650.54 m/s Con esta velocidad la sonda se encuentra en la primera órbita de transición, que es una elipse. Aplicamos la energía total de esta elipse a este punto A y tendremos:
A
2A
1PgACA1Telipse r
MmG'mv21
a2MmGEEE −=−⇒+=
3
23112
1
2311
10900010444.61067.654.2650
21
a210444.61067.6
⋅
⋅⋅−=
⋅⋅− −−
2a1=34030241.02 m=34030.24 km ⇒ 2a1=rA+rB ⇒ rB=2a1-rA=34030.24-9000=25030.24 km rB=25030.24 km
b) A continuación vamos a determinar la velocidad en el punto B. Para conocer la velocidad en dicho punto en la primera órbita elíptica, aplicamos la conservación del momento angular entre las posiciones A y B:
LA=LB ⇒ rAmv’AsenϕA=rBmvBsenϕB En los puntos A y B el radio vector es perpendicular a la velocidad, luego:
ϕA=ϕB=90º ⇒ senϕA=senϕB=1 Nos queda pues:
rAmv’AsenϕA=rBmvBsenϕB ⇒ rAv’A=rBvB ⇒ 9000 · 2650.54=25030.24vB ⇒ vB=953.04 m/s A continuación se desea situar la sonda en una segunda órbita elíptica, cuyo eje mayor es:
2a2=rB+rC=25030.24+4000=29030.24 km Aplicando la conservación de la energía en esta órbita para el punto B, podemos determinar la velocidad que tiene que llevar la sonda en dicha órbita:
B
2B
2PgBCB2Telipse r
MmG'mv21
a2MmGEEE −=−⇒+=
s/m90.687'v1024.25030
10444.61067.6'v21
1024.2903010444.61067.6 B3
23112
B3
2311 =⇒
⋅
⋅⋅−=
⋅
⋅⋅− −−
Por tanto el incremento de velocidad que debe comunicarse a la sonda en el punto B para cambiar de la elipse 1 a la 2 es:
∆vB=v’B-vB=687.90-953.04=-265.14 m/s ∆vB=-265.14 m/s
c) El radio vector de la sonda al ir desde A hasta B en la primera órbita de transferencia barre la mitad del área de la elipse. Como la velocidad areolar es constante, y en barrer el área completa tardaría un período, en barrer media área tardará medio período. De acuerdo a la tercera ley de Kepler:

=
⋅⋅⋅
π=
π==
−
3
2311
231
21
234030241
10444.61067.64
21a
GM4
21
2T
t
=33632.70 s=9 h 20 min 33 s t=9 h 20 min 33 s
d) Ahora vamos a ver las velocidades de la sonda en el punto C. Inicialmente se encuentra en la segunda órbita de transferencia. Aplicamos por tanto la conservación del momento angular entre las posiciones B y C:
LB=LC ⇒ rBmv’BsenϕB=rCmvCsenϕC En los puntos B y C el radio vector es perpendicular a la velocidad, luego:
ϕB=ϕC=90º ⇒ senϕB=senϕC=1 Nos queda pues:
rBmv’BsenϕB=rCmvCsenϕC ⇒ rBv’B=rCvC ⇒ 25030.24 · 687.90=4000vC ⇒ vC=4304.58 m/s Al final la sonda debe quedar insertada en la trayectoria circular. En una trayectoria circular el movimiento es circular y uniforme, de modo que la única aceleración que debe tener la sonda es la normal o centrípeta. En cuanto a fuerzas, estará sometida a la fuerza de atracción gravitatoria, que tiene la dirección del radio de curvatura. Así pues, aplicando la segunda ley de Newton a dicha órbita:
s/m01.3278104000
10444.61067.6rGM'v
r'v
mrMmGmaF 3
2311
CC
C
2C
2C
nn =⋅
⋅⋅⋅==⇒=⇒=Σ
−
El incremento de velocidad en el punto C es por tanto: ∆vC=v’C-vC=3278.01-4304.58=-1026.57 m/s
∆vC=-1026.57 m/s e) La ecuación de la cónica será:
θε+α
=cos1
r
donde tendremos que determinar la ascensión recta (α) y la excentricidad (ε). Para ello conocemos dos puntos de la cónica, los puntos B y C. Aplicando la ecuación de la cónica a estos dos puntos tendremos:
ε−α
=⇒ε−
α=⇒−=θ⇒=θ⇒=
124.25030
1r1cosº180rr BB
ε+α
=⇒ε+
α=⇒=θ⇒=θ⇒=
14000
1r1cosº0rr CC
Tenemos dos ecuaciones y dos incógnitas. Dividiendo las dos ecuaciones:
724.04000400024.2503024.2503011
400024.25030
=ε⇒ε+=ε−⇒ε−ε+
=
Y de cualquiera de las ecuaciones despejamos la ascensión recta:
km70.6897)724.01(4000)1(40001
4000 =+=ε+=α⇒ε+
α=
Por tanto la ecuación de la órbita es:
θ+=
θε+α
=cos724.01
70.6897cos1
r
θ+=
cos724.0170.6897r

20. - Un satélite recorre una órbita circular situada 1 0000 km por encima de la superficie terrestre. En el punto A se reduce su velocidad para situar al satélite en una órbita elíptica de transición cuya altitud mínima es de 5000 km en el punto B. En el punto B se vuelve a reducir la velocidad del satélite para introducirlo en una trayectoria circular. Por último, tras dar una vuelta completa y pasar de nuevo por el punto B se reduce la velocidad nuevamente para insertar el
vehículo en una trayectoria elíptica de aterrizaje cuyo apogeo es el punto B. Determinar: a) la disminución de velocidad ∆vA que hay que proporcionar al vehículo en el punto A para pasar de la órbita circular grande a la elíptica de transición; b) el período de la trayectoria elíptica de transición; c) la excentricidad de dicha órbita; d) la disminución de velocidad ∆vB que se debe comunicar al satélite en el punto B para situarlo en la trayectoria circular pequeña; e) si la reducción de velocidad del satélite para la inserción en la trayectoria de aterrizaje es de 21 00 m/s, ¿a qué ángulo se producirá éste? a) Los radios de las orbitas son:
rA=hA+R=10000+6370=16370 km; rB=hB+R=5000+6370=11370 km; rC=R=6370 km Inicialmente el satélite está en la órbita circular externa, luego el movimiento es circular uniforme. La única fuerza que actúa es la de atracción gravitatoria, y la única aceleración es la normal o centrípeta, ambas en la dirección del radio de giro y apuntando hacia el centro de curvatura. Aplicando la segunda ley de Newton tendremos:
s/m41.49441016370
1061067.6rGMv
rvm
rMmGmaF 3
2411
AA
A
2A
2A
nn =⋅
⋅⋅⋅==⇒=⇒=Σ
−
Después del incremento de velocidad, el satélite se sitúa en la órbita de transición, cuyo eje mayor es:
2a=rA+rB=16370+11370=27740 km Teniendo en cuenta que la energía total es constante:
A
2APACAT r
MmG'mv21
a2mM
GEEE −=−⇒+=
s/m68.4476'v1016370
1061067.6'v21
10277401061067.6 A3
24112
A3
2411 =⇒
⋅⋅
⋅−=⋅
⋅⋅− −−
Por tanto la reducción de velocidad será: ∆vA=v’A-vA=4476.68-4944.41=-467.73 m/s
∆vA=-467.73 m/s b) El período de la órbita elíptica de transición, aplicando la tercera ley de Kepler, será:
s93.162232
10277401061067.6
4aGM4T
33
2411
23
2=
⋅⋅⋅⋅
π=
π=
−
T=16223.93 s c) Podemos aplicar directamente la ecuación de la excentricidad:
1802.011370163701137016370
rrrr
rrrr
BA
BA
mínmáx
mínmáx =+−
=+−
=+
−=ε
ε=0.1802 Si no nos sabemos la expresión de la excentricidad podemos obtenerla a partir de la ecuación de la cónica. Dicha ecuación es:

θε+α
=cos1
r
donde r es el radio vector, α la ascensión recta (radio vector cuando θ=90º), ε la excentricidad y θ el ángulo que forma el radio vector con la dirección del perigeo. Conocemos dos puntos de la cónica, A y B:
ε−α
=⇒−=θ⇒=θ⇒=1
r1cosº180rr AA
ε+α
=⇒=θ⇒=θ⇒=1
r1cosº0rr BB
Dividendo las dos expresiones:
1802.011
1137016370
11
rr
1
1rr
B
A
B
A =ε⇒ε−ε+
=⇒ε−ε+
=⇒
ε+αε−
α
=
ε=0.1802 d) A continuación el satélite viaja a través de la trayectoria elíptica desde A hasta B aumentando su velocidad. Para calcular la velocidad con que llega al punto B aplicamos la conservación del momento angular:
LA=LB ⇒ mrAv’AsenϕA=mrBvBsenϕB siendo ϕ el ángulo que forma el radio vector con la velocidad. En los puntos A y B el radio vector es perpendicular a la velocidad, luego tendremos:
ϕA=ϕB=90º ⇒ senϕA=senϕB=1 ⇒ mrAv’AsenϕA=mrBvBsenϕB ⇒ rAv’A=rBvB ⇒ ==B
AAB r
'vrv
s/m32.644511370
68.447616370=
⋅=
Después de la reducción de velocidad, el satélite queda incorporado a la órbita circular interna, luego aplicamos de nuevo la segunda ley de Newton, de idéntico modo a como lo hicimos en la órbita circular externa:
s/m78.59321011370
1061067.6r
GM'vr'v
mrMmGmaF 3
2411
BB
B
2B
2B
nn =⋅
⋅⋅⋅==⇒=⇒=Σ
−
Por tanto la reducción de velocidad es de: ∆vB=v’B-vB=5932.78-6445.32=-512.54 m/s
∆vB=-512.54 m/s e) Al pasar por el punto B la velocidad se disminuye en 2100 m/s luego tendremos que en la trayectoria de aterrizaje la velocidad será:
v’’B=v’B-∆v’B=5932.78-2100=3832.78 m/s Por tanto podemos determinar el eje mayor de la cónica de aterrizaje, ya que en el punto B conocemos tanto la energía cinética como la potencial. Aplicando la conservación de la energía:
B
2BPBCBT r
MmG''mv21
'a2mM
G'E'E'E −=−⇒+=
3
24112
2411
10113701061067.678.3832
21
'a21061067.6
⋅⋅
⋅−=⋅
⋅− −−
2a=14368400 m=14368.4 km Conocemos la distancia en el apogeo, que es rB, luego podemos determinar la del perigeo:
2a=rB+rP ⇒ 14368.4=11370+rP ⇒ rP=2998.4 km Ahora determinamos la ecuación de la cónica, que será:
θε+α
=cos'1'r

Conocemos dos puntos de la cónica:
'1'r1cosº180rr BB ε−α
=⇒−=θ⇒=θ⇒=
'1'r1cosº0rr PP ε+α
=⇒=θ⇒=θ⇒=
Dividendo las dos expresiones:
5816.0''1'1
4.299811370
'1'1
rr
'1''1
'
rr
P
B
P
B =ε⇒ε−ε+
=⇒ε−ε+
=⇒
ε+αε−
α
=
Por tanto la ascensión recta:
km39.4745)5816.01(11370)'1(r''1
'r BB =−=ε−=α⇒ε−
α=
La ecuación de la cónica es:
θ+=
θε+α
=cos5816.01
69.4745cos'1'r
En el punto de aterrizaje r=R=6370 km luego sustituyendo:
º1164385.0coscos5816.01
69.47456370cos5816.01
69.4745r =θ⇒−=θ⇒θ+
=⇒θ+
=
θ=116º