Tema 05a-Diseño de compensadores utilizando el Lugar de...
49
Fernando di Sciascio Control II -2017 Diseño de Compensadores utilizando el Lugar de las Raíces
Transcript of Tema 05a-Diseño de compensadores utilizando el Lugar de...

Fernando di Sciascio
Control II -2017
Diseño de Compensadoresutilizando el
Lugar de las Raíces
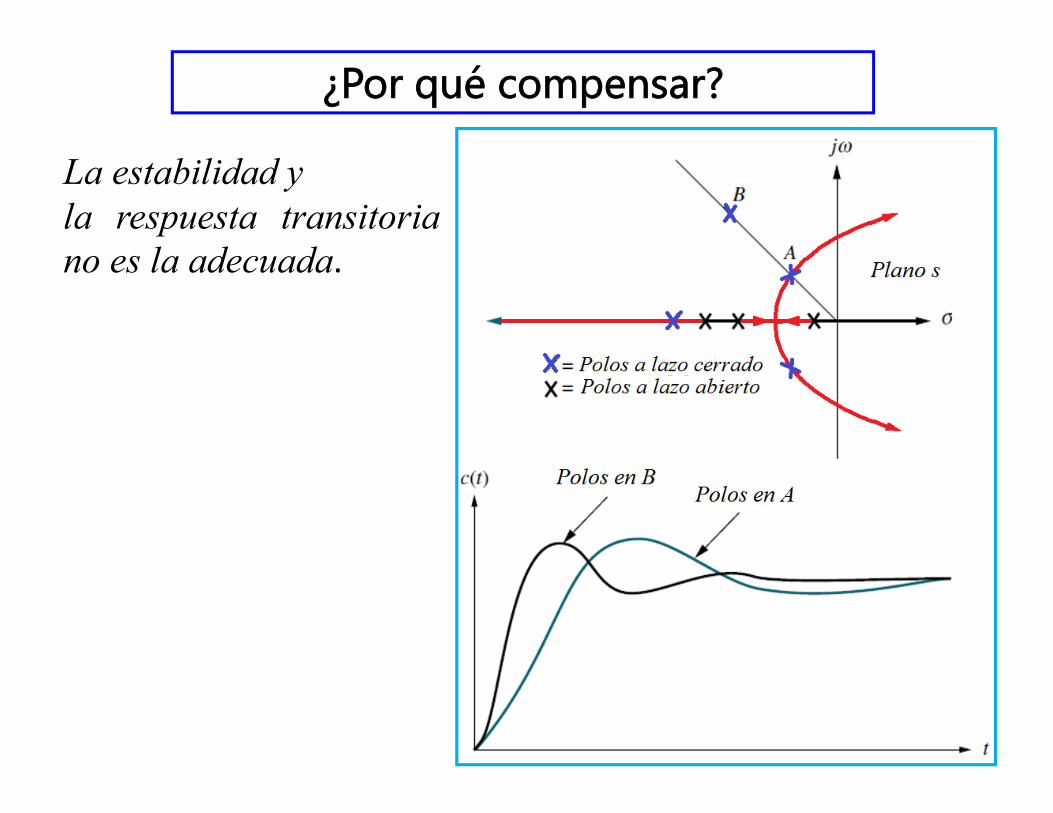
La estabilidad yla respuesta transitoriano es la adecuada.
¿Por qué compensar?
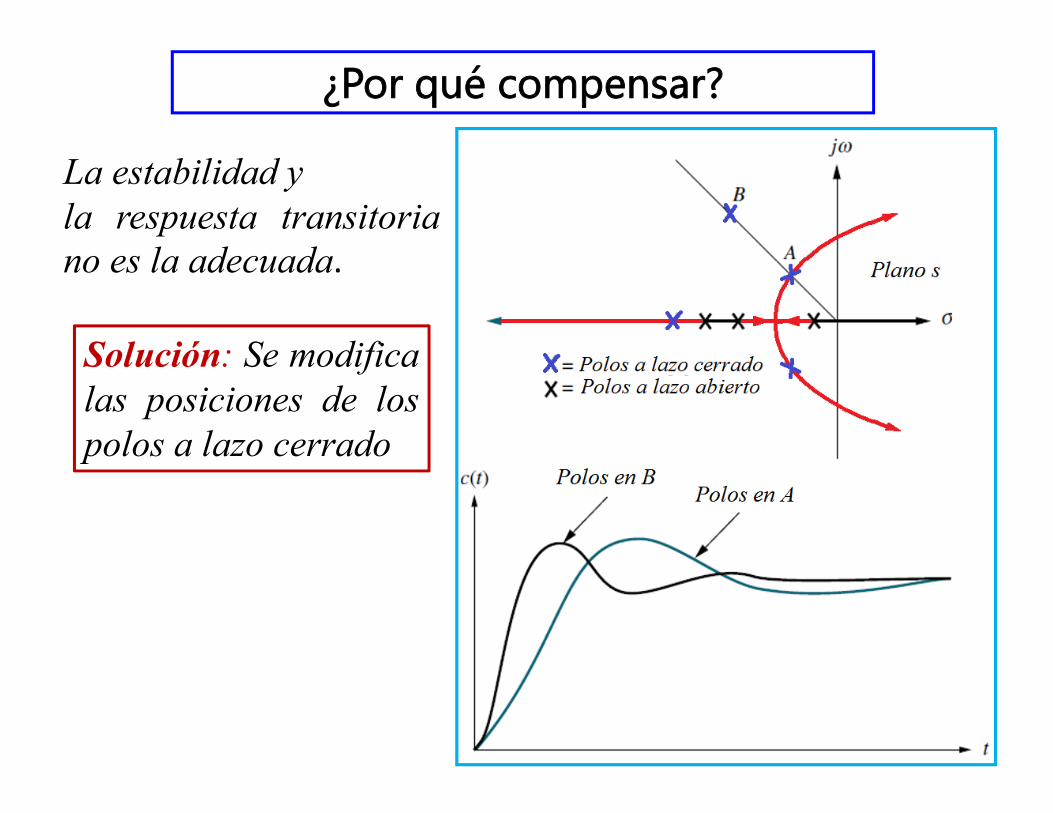
La estabilidad yla respuesta transitoriano es la adecuada.
Solución: Se modificalas posiciones de lospolos a lazo cerrado
¿Por qué compensar?

El error en estadoestacionario es mayor al especificado.
¿Por qué compensar?

El error en estadoestacionario es mayor al especificado.
Solución: ● Incrementar la gananciadel sistema sin deteriorarla respuesta transitoria. ● Eventualmente se incrementa el tipo de sistema.
¿Por qué compensar?
1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario. Este incremento de la ganancia no debe reducir apreciablemente la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria. Solución: El lugar de las raíces debe ser reconfigurado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser reconfigurado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?

1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario. Este incremento de la ganancia no debe reducir apreciablemente la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria. Solución: El lugar de las raíces debe ser reconfigurado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser reconfigurado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?

1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario sin deteriorar la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria. Solución: El lugar de las raíces debe ser reconfigurado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser reconfigurado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?

1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario sin deteriorar la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria. Solución: El lugar de las raíces debe ser reconfigurado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser reconfigurado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?
1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario sin deteriorar la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria. Solución: El lugar de las raíces debe ser modificado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser reconfigurado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?
1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario sin deteriorar la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria.Solución: El lugar de las raíces debe ser modificado moviéndolo hacia la izquierda del eje imaginario..
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.
¿Por qué compensar?
1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario sin deteriorar la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria.Solución: El lugar de las raíces debe ser modificado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser reconfigurado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?
1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario sin deteriorar la estabilidad del sistema..
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria. Solución: El lugar de las raíces debe ser modificado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser reconfigurado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?

1. El sistema es estable y la respuesta transitoria es satisfactoria, pero el error en estado estacionario es demasiado grande. Solución: Se debe incrementar la ganancia para reducir el error en estado estacionario sin deteriorar la estabilidad del sistema.
2. El sistema es estable, pero la respuesta transitoria no es satisfactoria. Solución: El lugar de las raíces debe ser modificado moviéndolo hacia la izquierda del eje imaginario.
3. El sistema es estable, pero tanto la respuesta transitoria como la respuesta en estado estacionario son insatisfactorias.Solución: El lugar de las raíces debe moverse hacia la izquierda y la ganancia debe incrementarse.
4. El sistema es inestable para todos los valores de la ganancia.Solución: El lugar de las raíces debe ser modificado para que parte de cada rama este del lado izquierdo del plano s, haciendo que el sistema sea estable para un rango de la ganancia.
¿Por qué compensar?

Tipos de compensadores
● El lugar de las raíces indica si se puede o no obtenerel comportamiento deseado en la respuesta transitoriay en el error de estado estacionario modificando laganancia.
● Normalmente no se puede cumplir con lasespecificaciones de comportamiento variando laganancia (o un parámetro cualquiera) solamente.
Es necesario modificar el lugar de las raíces
Diseño de compensadores usando el Lugar de las Raíces
● El diseño usando el lugar de las raíces se basa en añadirpolos y ceros a la función de transferencia en lazo abiertodel sistema y hacer que el lugar de las raíces pase por lospolos en lazo cerrado deseados en el plano S.
● El problema de diseño, se convierte en mejorar elcomportamiento del sistema mediante la inserción de uncompensador. La compensación de un sistema de controlse reduce al diseño de un filtro cuyas característicastienden a compensar las características no deseables einalterables de la planta.
Diseño de compensadores usando el Lugar de las Raíces
● El diseño usando el lugar de las raíces se basa en añadirpolos y ceros a la función de transferencia en lazo abiertodel sistema y hacer que el lugar de las raíces pase por lospolos en lazo cerrado deseados en el plano S.
● El problema de diseño, se convierte en mejorar elcomportamiento del sistema mediante la inserción de uncompensador. La compensación de un sistema de controlse reduce al diseño de un filtro cuyas característicastienden a compensar las características no deseables einalterables de la planta.
Diseño de compensadores usando el Lugar de las Raíces

Diseño de compensadores usando el Lugar de las Raíces

Diseño de compensadores usando el Lugar de las Raíces

Especificaciones de Diseño
Diseñar un Sistema de control implica cumplir con determinadas especificaciones de diseño.Las especificaciones de diseño se clasifican según su dominio:
a) Especificaciones en el dominio de la frecuenciaLas veremos más adelante cuando diseñemos en frecuencia mediante diagramas de Bode.
b) Especificaciones en el dominio del tiempob1) Especificaciones de estabilidad y de respuesta transitoria.b2) Especificaciones de estado estacionario (errores)
Son las que utilizaremos para el diseño con el lugar de las raíces.

Especificaciones de Diseño
Diseñar un Sistema de control implica cumplir con determinadas especificaciones de diseño.Las especificaciones de diseño se clasifican según su dominio:
a) Especificaciones en el dominio de la frecuenciaLas veremos más adelante cuando diseñemos en frecuencia mediante diagramas de Bode.
b) Especificaciones en el dominio del tiempob1) Especificaciones de estabilidad y de respuesta transitoria.b2) Especificaciones de estado estacionario (errores)
Son las que utilizaremos para el diseño con el lugar de las raíces.
Especificaciones de Diseño
Diseñar un Sistema de control implica cumplir con determinadas especificaciones de diseño.Las especificaciones de diseño se clasifican según su dominio:
a) Especificaciones en el dominio de la frecuenciaLas veremos más adelante cuando diseñemos en frecuencia mediante diagramas de Bode.
b) Especificaciones en el dominio del tiempob1) Especificaciones de estabilidad y de respuesta transitoria.b2) Especificaciones de estado estacionario (errores)
Son las que utilizaremos para el diseño con el lugar de las raíces.

1. Tiempo de Subida, tr (Tr) (0.1 a 0.9 del valor final).2. Tiempo de pico, tp (TP) (tiempo para alcanzar el máximo).3. Porcentaje de sobreelongación, Mp(%) (%OS).4. Tiempo de Establecimiento, ts (Ts) (t hasta 2% del valor estacionario)
Especificaciones temporales

2
2 2( )
2n
n n
H ss s
w
xw w=
+ +
Repaso de Sistemas de Segundo Orden
Forma estándar del sistema de segundo orden
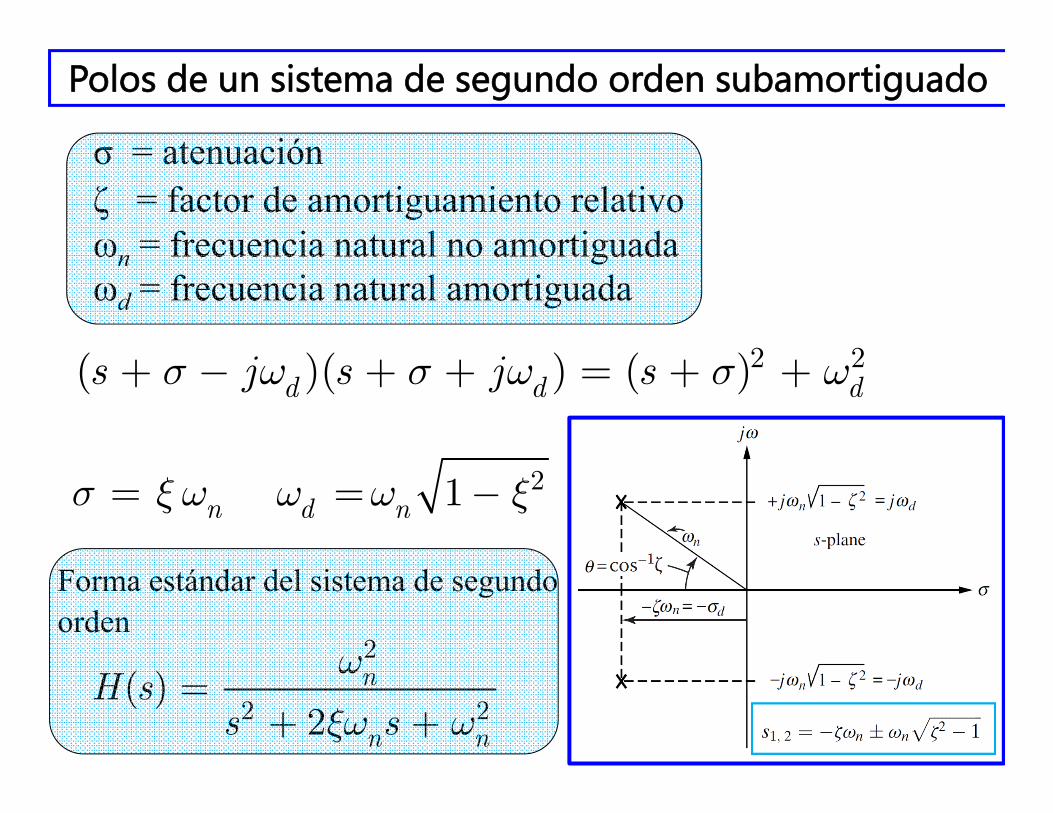
Polos de un sistema de segundo orden subamortiguado
2
2 2( )
2n
n n
H ss s
w
xw w=
+ +
ns x w= 21d nw w x= -
2 2( )( ) ( )d d ds j s j ss w s w s w+ - + + = + +
σ = atenuaciónζ = factor de amortiguamiento relativoωn = frecuencia natural no amortiguadaωd = frecuencia natural amortiguada
Forma estándar del sistema de segundo orden

Polos de un sistema de segundo orden subamortiguado

Respuesta de un sistema de segundo orden en función del amortiguamiento
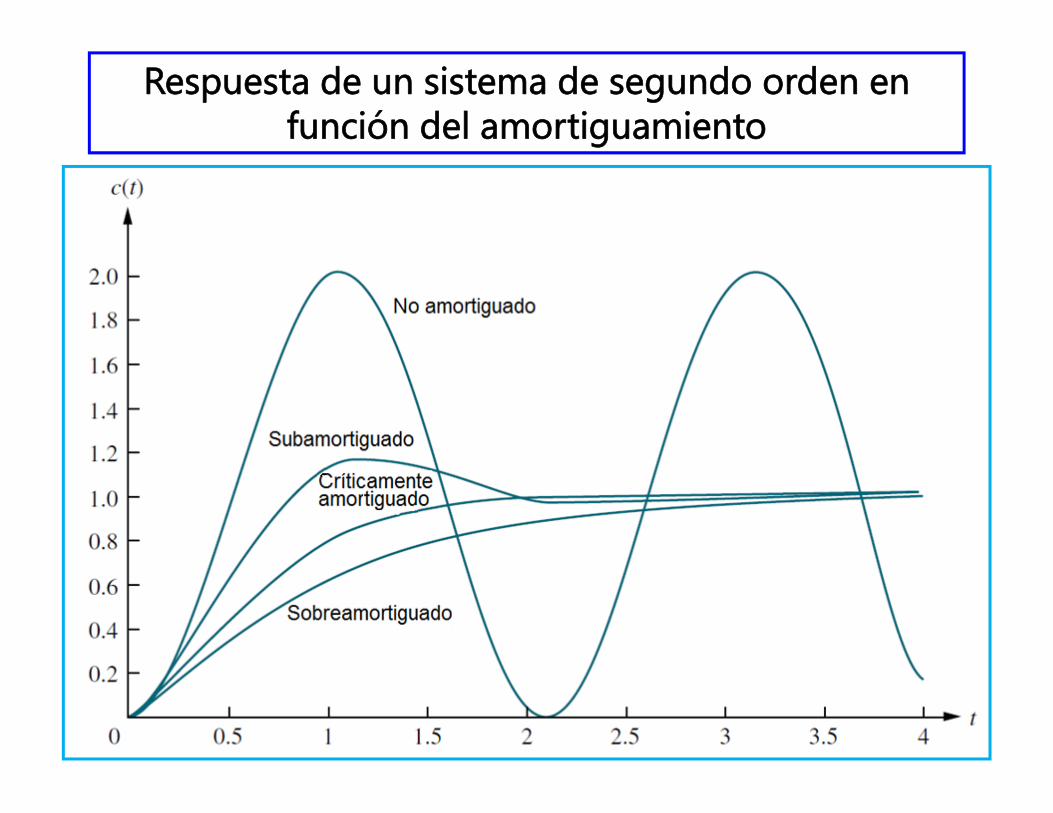
Respuesta de un sistema de segundo orden en función del amortiguamiento

Respuesta de un sistema de segundo orden en función del amortiguamiento
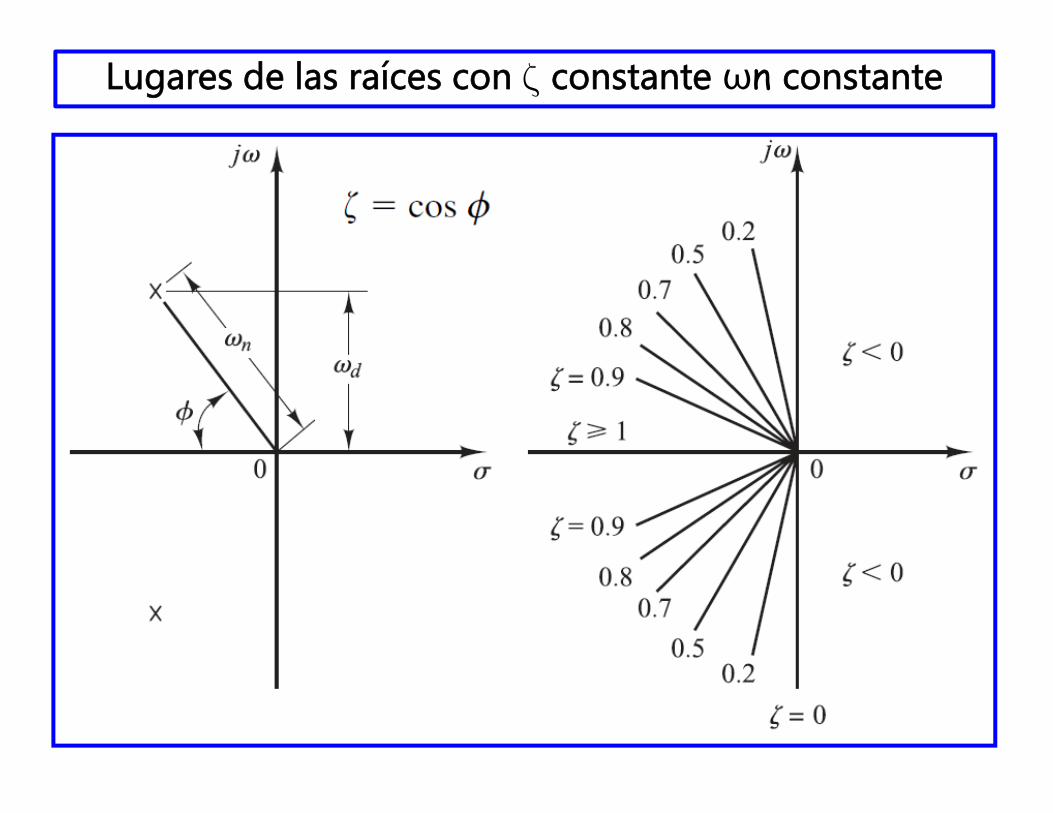
Lugares de las raíces con z constante ωn constante

Lugares de las raíces con %OS2 y Tp constante
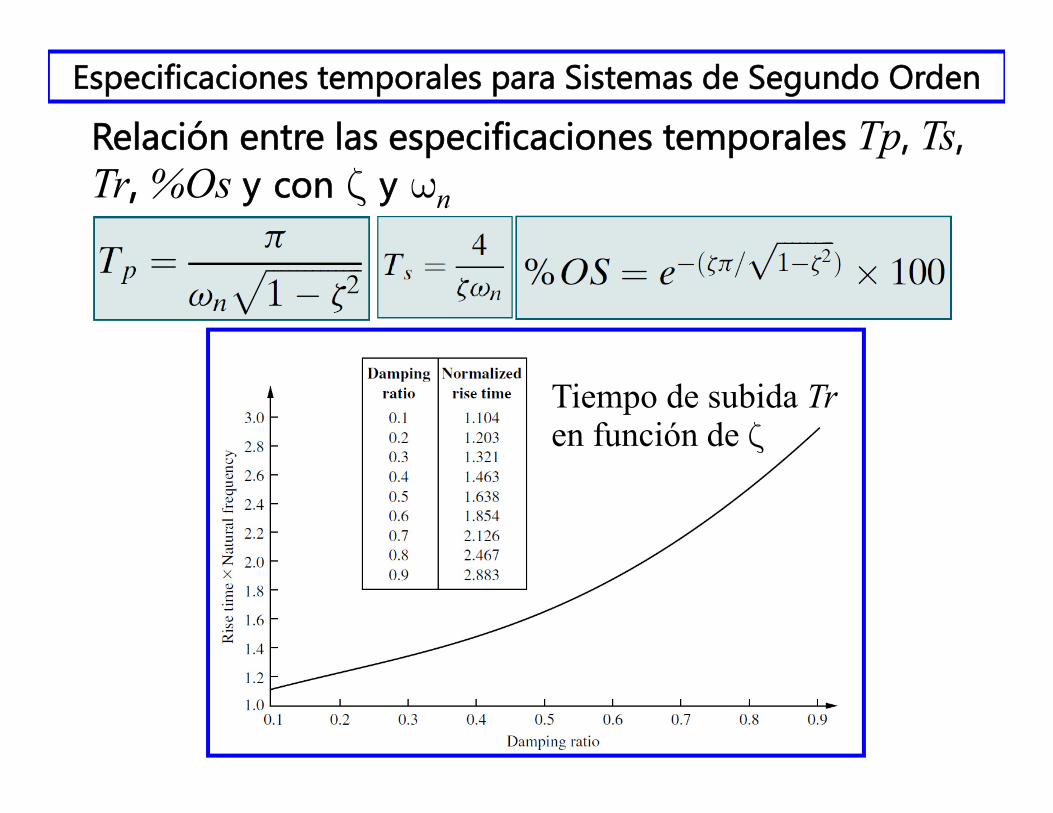
Relación entre las especificaciones temporales Tp, Ts,Tr, %Os y con z y wn
Tiempo de subida Tren función de z
Especificaciones temporales para Sistemas de Segundo Orden
1
1
factores complejos del numerador
factores complejos del denominador
( )( ) ( ) ( )
( )
mii
njj
K s zF s F s F s
s p
=
=
+= = =
+
1
1
distancia a los ceros ( )( )
distancia a los polos ( )
mii
njj
K K s zM F s
s p
=
=
+= = =
+
1 1
( ) ángulos desde los ceros ángulos desde los ceros
( ) ( )m n
i ji j
F s
s z s p
q
= =
= = -
= + - +
å å
å å
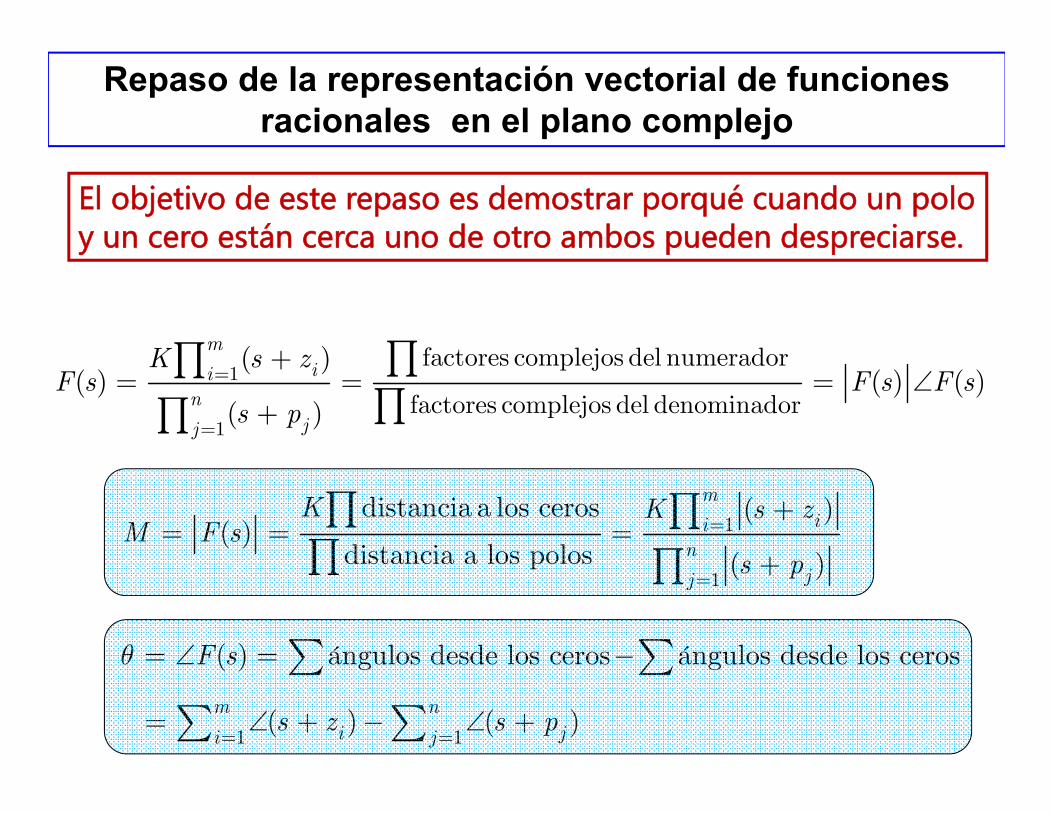
Repaso de la representación vectorial de funciones racionales en el plano complejo
El objetivo de este repaso es demostrar porqué cuando un polo y un cero están cerca uno de otro ambos pueden despreciarse.


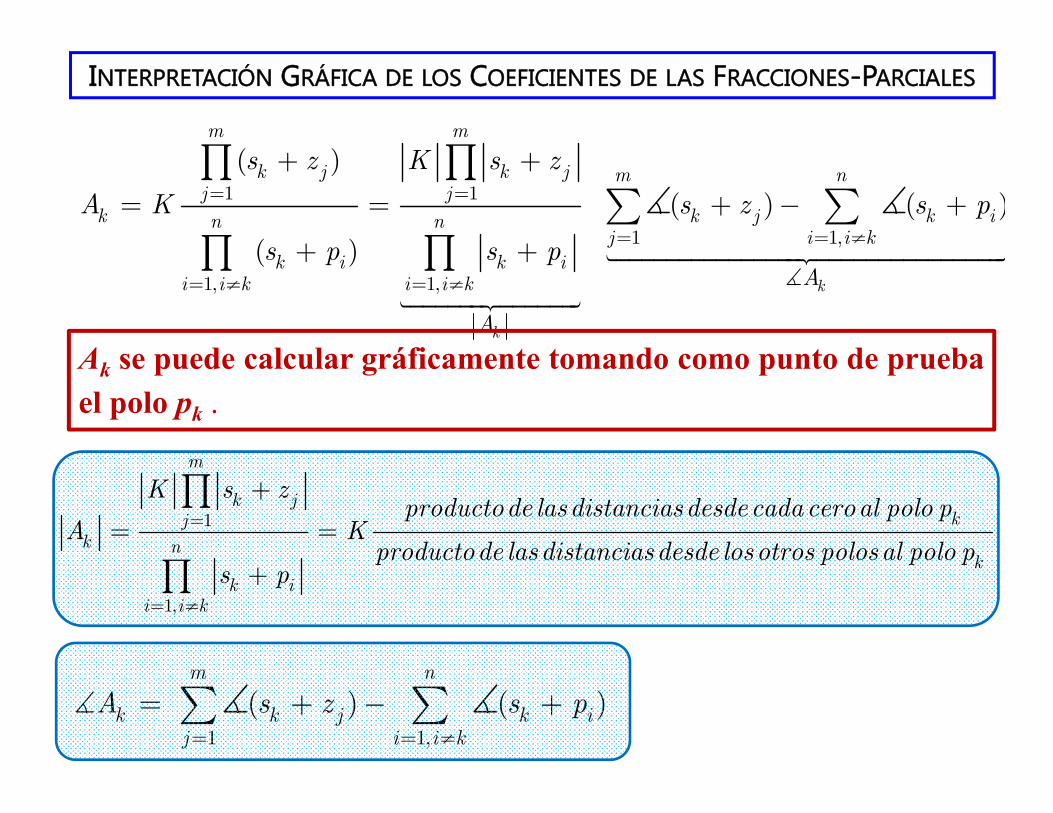
INTERPRETACIÓN GRÁFICA DE LOS COEFICIENTES DE LAS FRACCIONES-PARCIALES
Recordemos la influencia de cada polo en la salida de un sistema
Supongamos por simplicidad todos los polos reales.El desarrollo en fracciones parciales es:
Donde Ak son los residuos de T(s) es los polos correspondientes.
=
=
++ + + +
= = =+ + + +
+
1 2 1
1 2
1
( )( )( ) ( ) ( )( )
( )( ) ( )( ) ( ) ( )
( )
m
jj m jT
nT k n
kk
s zK s z s z s z s zN s
T s KD s s p s p s p s p
s p
= + + + + ++ + + +
1 2
1 2
( ) k n
k n
A A A AT s
s p s p s p s p
11 2
1 2
( )( )( ) ( )
( )( )( ) ( )
( )k
m
k jjk k k m
k k s sk k k n
k ii k
s zK s z s z s z
A s s T s Ks p s p s p
s p
==
¹
++ + +
= [( + ) ] = =+ + +
+
INTERPRETACIÓN GRÁFICA DE LOS COEFICIENTES DE LAS FRACCIONES-PARCIALES
= =
= = ¹
= ¹ = ¹
+ +
= = + - +
+ +
å å
1 1
1 1,
1, 1,
( )
( ) ( )
( )k
k
m m
k j k j m nj j
k k j k in nj i i k
k i k ii i k i i k A
A
s z K s z
A K s z s p
s p s p
=
= ¹
+
= =
+
1
1,
m
k jkj
k nk
k ii i k
K s zproductode lasdistanciasdesdecadaceroal polo p
A Kproductode lasdistanciasdesde losotros polosal polo p
s p
= = ¹
= + - +å å 1 1,
( ) ( )m n
k k j k ij i i k
A s z s p
Ak se puede calcular gráficamente tomando como punto de pruebael polo pk .

INTERPRETACIÓN GRÁFICA DE LOS COEFICIENTES DE LAS FRACCIONES-PARCIALES
1
1,
m
k jkj
k nk
k ii i k
K s zproductode lasdistanciasdesdecadaceroal polo p
A Kproductode lasdistanciasdesde losotros polosal polo p
s p
=
= ¹
+
= =
+
IMPORTANTE: Cuando un cero está cerca de un polo la fórmula
Nos dice que el residuo será muy pequeño y en muchos casos sepuede despreciar. Este hecho lo utilizamos en la sección siguiente.
Ejemplo:
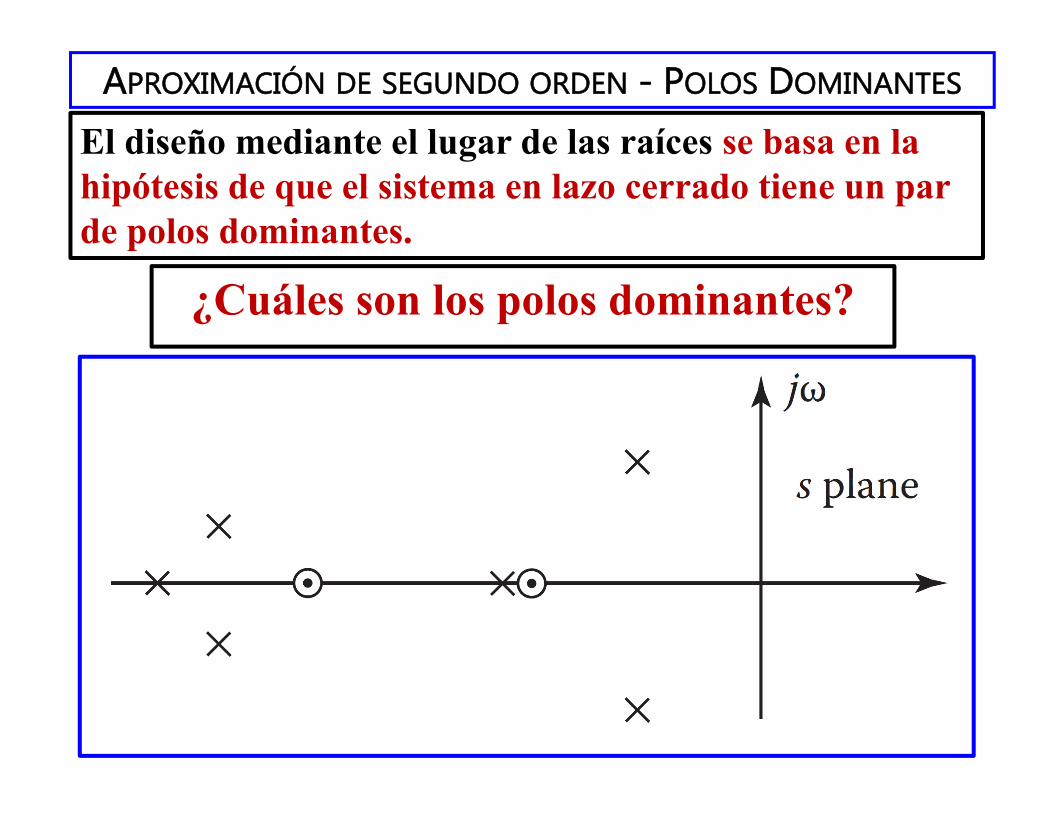
APROXIMACIÓN DE SEGUNDO ORDEN - POLOS DOMINANTES
¿Cuáles son los polos dominantes?
El diseño mediante el lugar de las raíces se basa en la hipótesis de que el sistema en lazo cerrado tiene un par de polos dominantes.

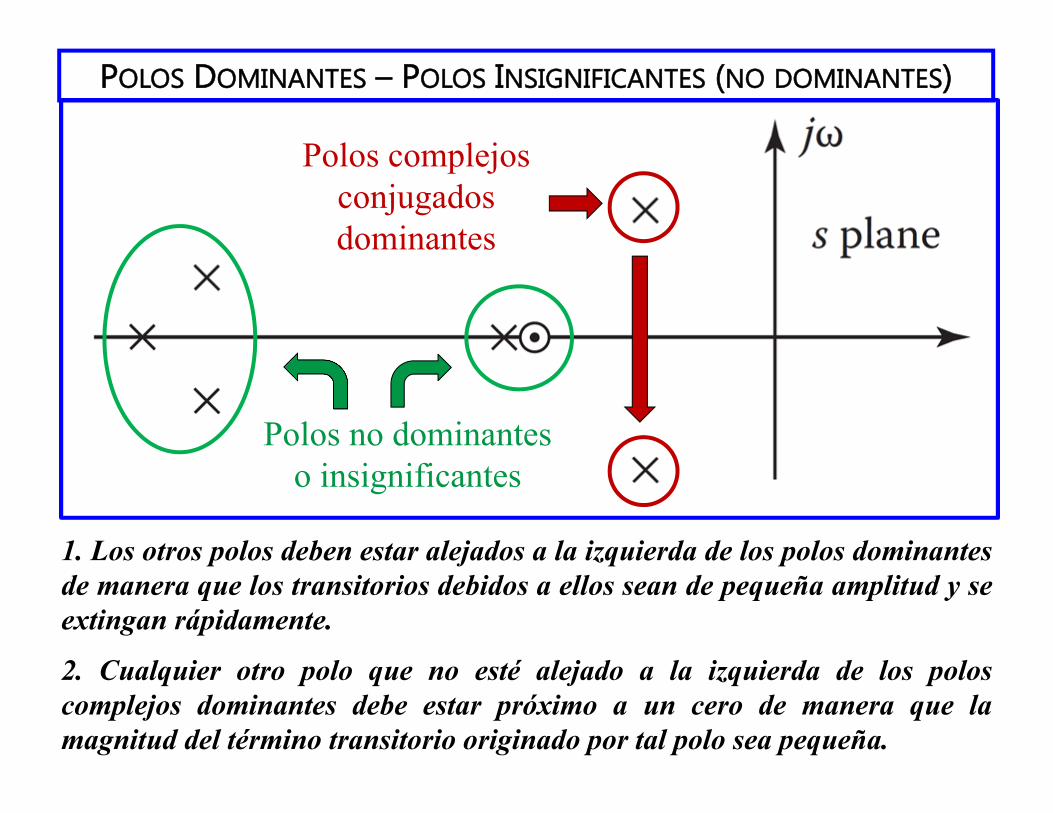
POLOS DOMINANTES – POLOS INSIGNIFICANTES (NO DOMINANTES)

Polos complejos conjugados dominantes
POLOS DOMINANTES – POLOS INSIGNIFICANTES (NO DOMINANTES)

Polos complejos conjugados dominantes
Polos no dominanteso insignificantes
1. Los otros polos deben estar alejados a la izquierda de los polos dominantesde manera que los transitorios debidos a ellos sean de pequeña amplitud y seextingan rápidamente.
2. Cualquier otro polo que no esté alejado a la izquierda de los poloscomplejos dominantes debe estar próximo a un cero de manera que lamagnitud del término transitorio originado por tal polo sea pequeña.
POLOS DOMINANTES – POLOS INSIGNIFICANTES (NO DOMINANTES)
Polos complejos conjugados dominantes
Polos no dominanteso insignificantes
1. Los otros polos deben estar alejados a la izquierda de los polos dominantesde manera que los transitorios debidos a ellos sean de pequeña amplitud y seextingan rápidamente.
2. Cualquier otro polo que no esté alejado a la izquierda de los poloscomplejos dominantes debe estar próximo a un cero de manera que lamagnitud del término transitorio originado por tal polo sea pequeña.
POLOS DOMINANTES – POLOS INSIGNIFICANTES (NO DOMINANTES)

No necesariamente los polos dominantes son complejosconjugados. El polo dominante puede ser un eje real, entonces elsistema se comporta aproximadamente como de primer orden.
POLOS DOMINANTES – POLOS INSIGNIFICANTES (NO DOMINANTES)

● El diseño mediante el lugar de las raíces se basa enla hipótesis de que el sistema en lazo cerrado tiene unpar de polos dominantes.
Aproximación de segundo orden

APROXIMACIÓN DE SEGUNDO ORDEN (INFLUENCIA 3ER POLO)

APROXIMACIÓN DE SEGUNDO ORDEN

APROXIMACIÓN DE SEGUNDO ORDEN
Los polos fuera de esas regiones deben estar cercanos a ceros paraque sean no dominantes o insignificantes.

Región admisible de
los polos a lazo cerrado