Tecnologia
56
TECNOLOGIA CIRCUITOS DIGITALES
-
Upload
gloria-rivald -
Category
Documents
-
view
102 -
download
0
Transcript of Tecnologia

TECNOLOGIA
CIRCUITOS DIGITALES

ProyectoQué es un proyecto?
Un proyecto es una planificación que consiste en un conjunto de actividades que se encuentran interrelacionadas y coordinadas;1 la razón de un proyecto es alcanzar objetivos específicos dentro de los límites que imponen un presupuesto, calidades establecidas previamente y un lapso de tiempo previamente definido.1 La gestión de proyectos es la aplicación de conocimientos, habilidades, herramientas y técnicas a las actividades de un proyecto para satisfacer los requisitos del proyecto.2
Un proyecto es reunir varias ideas para llevarlas a cabo, es un emprendimiento que tiene lugar durante un tiempo limitado, y que apunta a lograr un resultado único. Surge como respuesta a una necesidad, acorde con la visión de la organización, aunque ésta puede desviarse en función del interés. El proyecto finaliza cuando se obtiene el resultado deseado, y se puede decir que colapsa cuando desaparece la necesidad inicial, o se agotan los recursos disponibles.
Características de un proyecto según el PMI
De acuerdo con el Project Management Institute (PMI) las características de un proyecto son:3
• La capacidad de prestar un servicio como, por ejemplo, las funciones del negocio que respaldan la producción o la distribución
• Un resultado como, por ejemplo, salidas o documentos. Por ejemplo, de un proyecto de investigación se obtienen conocimientos que pueden usarse para determinar si existe o no una tendencia o si un nuevo proceso beneficiará a la sociedad.
La singularidad es una característica importante de los productos entregables de un proyecto. Por ejemplo, se han construido muchos miles de edificios de oficinas, pero cada edificio individual es único: diferente propietario, diferente diseño, diferente ubicación, diferente contratista, etc. La presencia de elementos repetitivos no cambia la condición fundamental de único del trabajo de un proyecto.
Elaboración gradual
La elaboración gradual es una característica de los proyectos que acompaña a los conceptos de temporal y único. “Elaboración gradual” significa desarrollar en pasos
e ir avanzando mediante incrementos. Por ejemplo, el alcance de un proyecto se define de forma general al comienzo del proyecto, y se hace más explícito y detallado a medida que el equipo del proyecto desarrolla un mejor y más completo entendimiento de los objetivos y de los productos entregables. La elaboración gradual no debe confundirse con la corrupción del alcance.
Tipos de proyectos
Un proyecto también es un esfuerzo temporal que se lleva a cabo para crear un producto, servicio o resultado único.
Existen múltiples clasificaciones de los proyectos, una de ellas los considera como productivos y públicos.4
Proyecto productivo: Son proyectos que buscan generar rentabilidad económica y obtener ganancias en dinero. Los promotores de estos proyectos suelen ser empresas e individuos interesados en alcanzar beneficios económicos.
Proyecto público o social: Son los proyectos que buscan alcanzar un impacto sobre la calidad de vida de la población, los cuales no necesariamente se expresan en dinero. Los promotores de estos proyectos son elestado, los organismos multilaterales, las ONG y también las empresas, en sus políticas de responsabilidad social.
Otras formas de realizar la clasificación de los proyectos son las siguientes:
Basándose en el contenido del proyecto Proyectos de construcción
Proyectos de Informática
Proyectos empresariales
Proyectos de desarrollo de productos
Basándose en la organización participante
Proyectos Internos
Proyectos de departamento
Proyectos de unidades cruzadas
Proyectos externos (de imagen corporativa)

Basándose en la complejidad
Proyectos Simples
Proyectos complejos
Proyectos técnicos
Programas
Mega proyectos
Proyectos de vida
Proyectos escolares.
Etapas de un proyecto
Ciclo de un proyecto.
La idea de proyecto: Que consiste en establecer la necesidad u oportunidad a partir de la cual es posible iniciar el diseño del proyecto. La idea de proyecto puede iniciarse debido a alguna de las siguientes razones:1
Porque existen necesidades insatisfechas actuales o se prevé que existirán en el futuro si no se toma medidas al respecto.
Porque existen potencialidades o recursos subaprovechados que pueden optimizarse y mejorar las condiciones actuales.
Porque es necesario complementar o reforzar otras actividades o proyectos que se producen en el mismo lugar y con los mismos involucrados.
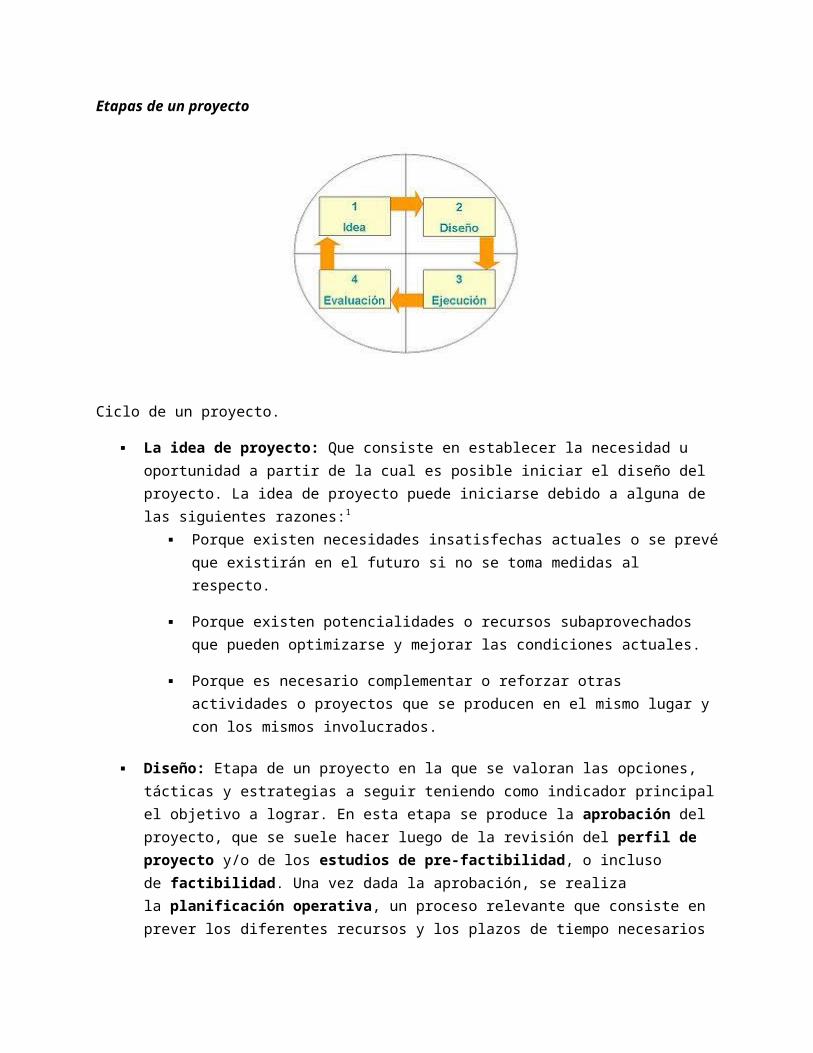
Diseño: Etapa de un proyecto en la que se valoran las opciones, tácticas y estrategias a seguir teniendo como indicador principal el objetivo a lograr. En esta etapa se produce la aprobación del proyecto, que se suele hacer luego de la revisión del perfil de proyecto y/o de los estudios de pre-factibilidad, o incluso de factibilidad. Una vez dada la aprobación, se realiza la planificación operativa, un proceso relevante que consiste en prever los diferentes recursos y los plazos de tiempo necesarios para alcanzar los fines del proyecto, asimismo establece la asignación o requerimiento de personal respectivo.
Ejecución: Consiste en poner en práctica la planificación llevada a cabo previamente.
Evaluación. Etapa final de un proyecto en la que éste es revisado, y se llevan a cabo las valoraciones pertinentes sobre lo planeado y lo ejecutado, así como sus resultados, en consideración al logro de los objetivos planteados.
Documentación de un proyecto
1 Importancia.
2 Informe técnico del proyecto.
2.1 Plan estructurado del proyecto. (Marco Lógico)
2.2 Plan de control de personal.
2.3 Otros planes.
2.4 Manejo de recursos.
3 Informe administrativo.
3.1 Plan organizacional del proyecto.
3.2 Plan de gastos / plazos.
3.3 Plan de actividades del personal.
3.4 Plan de gestión de riesgos.
3.5 Otros planes.
4 Manuales de un proyecto.
4.1 Manual técnico.
4.2 Manual de usuario.
4.3 Manual administrativo.
Las organizaciones trabajan. El trabajo generalmente involucra operaciones o proyectos, aunque las dos se puedan traslapar. Las operaciones y los proyectos comparten muchas características; por ejemplo, ellas son:
o Desarrolladas por personas.
o Limitadas por recursos escasos.
o Son planeadas, ejecutadas, y controladas.
Las operaciones y los proyectos difieren principalmente en que las operaciones son sucesivas y repetitivas mientras que los proyectos son temporales y únicos. Un proyecto por lo tanto puede ser definido en término de sus características distintivas— un proyecto es una tarea temporal desarrollada para crear un producto o servicio único. Temporal quiere decir que cada proyecto tiene un comienzo definitivo y una terminación definitiva. Único quiere decir que el producto o servicio es diferente de alguna manera distintiva de todos los proyectos o servicios similares.
Los proyectos son desarrollados en todos los niveles de la organización. Estos pueden involucrar a una sola persona o a muchas miles. Y pueden requerir menos de 100 horas para completarse o más de 10,000,000. Los proyectos pueden involucrar a una sola unidad de una organización o cruzar muchas fronteras organizacionales como en consorcios o sociedades de hecho. Los proyectos son muchas veces componentes críticos de la estrategia de negocios de la organización que los desarrolla. Ejemplos de proyectos pueden incluir:
o Desarrollar un nuevo producto o servicio.
o Efectuar un cambio de estructura, de personal, o de estilo en una organización.
o Desarrollar un nuevo vehículo de transporte.
o Desarrollar o adquirir un nuevo sistema de información.

o Construir o desarrollar una construcción.
o Administrar una campaña electoral.
o Implementar un nuevo procedimiento o proceso en un negocio
Referencias
Parodi, C. (2001). «El lenguaje de los proyectos». Gerencia social. Diseño, monitoreo y evaluación de proyectos sociales. Lima-Perú: Universidad del Pacífico. ISBN 9972-603-32-6.
Cohen, E. (1992). "Evaluación de proyectos sociales". CECSA.
Notas
1. ↑ a b c Parodi, 2001, p. 132. ↑ Project Management Institute, Guía de los fundamentos de gestión de
proyectos PMBOK, Tercera Edición"
3. ↑ La información de esta sección procede del PMBOK Tercera Versión en Español Project Management Institute. «Capítulo 1». Guía de los Fundamentos de la Dirección de Proyectos (3ª edición). ISBN 1-930699-73-5.
Circuito digital
Digital quiere decir que utiliza o que contiene información convertida al código binario, el lenguaje de números (ceros y unos) que emplean los ordenadores para almacenar y manipular los datos.
Circuito Lógico es aquél que maneja la información en forma binaria, o sea con valores de "1" y "0".
Estos dos niveles lógicos de voltaje fijos representan:
"1" nivel alto o "high". "0" nivel bajo o "low".
Definición
Los circuitos cuyos componentes realizan operaciones análogas a las que indican los operadores lógicos se llaman "Circuitos Lógicos" o "circuitos digitales".
Los Circuitos Lógicos están compuestos por elementos digitales como la compuerta AND (Y), compuerta OR (O), compuerta NOT (NO) y otras combinaciones muy complejas de los circuitos antes mencionados.
Tipos de Elementos Digitales
Estas combinaciones (ya mencionadas) dan lugar a otros tipos de elementos digitales. Aquí hay un listado de estos.
Compuerta NAND (No Y) Compuerta NOR (No O)
Compuerta OR exclusiva (O exclusiva)
Mutiplexores o multiplexadores
Demultiplexores o demultiplexadores
Decodificadores
Codificadores
Memorias
flip-flops
Micro Procesadores
Micro Controladores
Etc.
Información General
La electrónica moderna usa electrónica digital para realizar perfeccionamientos en la tecnología, muchas veces nos vemos frente a éstos sin darnos cuenta, el llamado efecto "Caja Negra".
En el circuito lógico digital existe transmisión de información binaria entre sus circuitos. A primera instancia esto nos parece relativamente simple, pero los circuitos electrónicos son bastante complejos ya que su estructura esta compuesta por un número muy grande de circuitos simples, donde todos deben funcionar de la

manera correcta, para lograr el resultado esperado y no obtener una información errónea.
La información binaria que transmiten los circuitos ya mencionados, se representan de la siguiente forma:
"0" o "1" "Falso" o "Verdadero"
"On" y "Off"
"Abierto" o "Cerrado"
o cualquier mecanismo que represente dos estados mutuamente excluyentes
Compuerta Logica
Una puerta lógica, o compuerta lógica, es un dispositivo electrónico que es la expresión física de un operador booleano en la lógica de conmutación. Cada puerta lógica consiste en una red de dispositivos interruptores que cumple las condiciones booleanas para el operador particular. Son esencialmente circuitos de conmutación integrados en un chip.
Claude Elwood Shannon experimentaba con relés o interruptores electromagnéticos para conseguir las condiciones de cada compuerta lógica, por ejemplo, para la función booleana Y (AND) colocaba interruptores encircuito serie, ya que con uno solo de éstos que tuviera la condición «abierto», la salida de la compuerta Y sería = 0, mientras que para la implementación de una compuerta O (OR), la conexión de los interruptores tiene una configuración en circuito paralelo.
La tecnología microelectrónica actual permite la elevada integración de transistores actuando como conmutadores en redes lógicas dentro de un pequeño circuito integrado. El chip de la CPU es una de las máximas expresiones de este avance tecnológico.
En nanotecnología se está desarrollando el uso de una compuerta lógica molecular, que haga posible la miniaturización de circuitos.

Lógica directa
Puerta SÍ o Buffer
Símbolo de la función lógica SÍ: a) Contactos, b) Normalizado y c) No normalizado
La puerta lógica SÍ, realiza la función booleana igualdad. En la práctica se suele utilizar como amplificador de corriente o como seguidor de tensión, para adaptar impedancias (buffer en inglés).
La ecuación característica que describe el comportamiento de la puerta SÍ es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta SI
Entrada A Salida A
0 0
1 1
Puerta AND
Símbolo de la función lógica Y: a) Contactos, b) Normalizado y c) No normalizado

La puerta lógica Y, más conocida por su nombre en inglés AND ( ), realiza la función booleana de producto lógico. Su símbolo es un punto (·), aunque se suele omitir. Así, el producto lógico de las variables A y B se indica como AB, y se lee A y B o simplemente A por B.
La ecuación característica que describe el comportamiento de la puerta AND es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta AND
Entrada A Entrada B Salida
0 0 0
0 1 0
1 0 0
1 1 1
Así, desde el punto de vista de la aritmética módulo 2, la compuerta AND implementa el producto módulo 2.
Puerta OR
Símbolo de la función lógica O: a) Contactos, b) Normalizado y c) No normalizado
La puerta lógica O, más conocida por su nombre en inglés OR ( ), realiza la operación de suma lógica.

La ecuación característica que describe el comportamiento de la puerta OR es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta OR
Entrada A Entrada B Salida
0 0 0
0 1 1
1 0 1
1 1 1
Podemos definir la puerta O como aquella que proporciona a su salida un 1 lógico si al menos una de sus entradas está a 1.
Puerta OR-exclusiva (XOR)
Símbolo de la función lógica O-exclusiva: a) Contactos, b) Normalizado y c) No normalizado
La puerta lógica OR-exclusiva, más conocida por su nombre en inglés XOR, realiza la función booleana A'B+AB'. Su símbolo es el más (+) inscrito en un círculo. En la figura de la derecha pueden observarse sus símbolos en electrónica.
La ecuación característica que describe el comportamiento de la puerta XOR es:
|-

Su tabla de verdad es la siguiente:
Tabla de verdad puerta XOR
Entrada A Entrada B Salida
0 0 0
0 1 1
1 0 1
1 1 0
Se puede definir esta puerta como aquella que da por resultado uno, cuando los valores en las entradas son distintos. ej: 1 y 0, 0 y 1 (en una compuerta de dos entradas).
Si la puerta tuviese tres o más entradas , la XOR tomaría la función de suma de paridad, cuenta el número de unos a la entrada y si son un número impar, pone un 1 a la salida, para que el número de unos pase a ser par. Esto es así porque la operación XOR es asociativa, para tres entradas escribiríamos: a (b c) o bien (ab) c. Su tabla de verdad sería:
XOR de tres entradas
Entrada A Entrada B Entrada C Salida
0 0 0 0
0 0 1 1
0 1 0 1
0 1 1 0
1 0 0 1

1 0 1 0
1 1 0 0
1 1 1 1
Desde el punto de vista de la aritmética módulo 2, la puerta XOR implementa el producto módulo 2.
Lógica negada
Puerta NO (NOT)
Símbolo de la función lógica NO: a) Contactos, b) Normalizado y c) No normalizada
La puerta lógica NO (NOT en inglés) realiza la función booleana de inversión o negación de una variable lógica. Una variable lógica A a la cual se le aplica la negación se pronuncia como "no A" o "A negada".
La ecuación característica que describe el comportamiento de la puerta NOT es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta NOT
Entrada A Salida
0 1

1 0
Se puede definir como una puerta que proporciona el estado inverso del que esté en su entrada.
Puerta NO-Y (NAND)
Símbolo de la función lógica NO-Y: a) Contactos, b) Normalizado y c) No normalizado
La puerta lógica NO-Y, más conocida por su nombre en inglés NAND, realiza la operación de producto lógico negado. En la figura de la derecha pueden observarse sus símbolos en electrónica.
La ecuación característica que describe el comportamiento de la puerta NAND es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta NAND
Entrada A Entrada B Salida
0 0 1
0 1 1
1 0 1

1 1 0
Podemos definir la puerta NO-Y como aquella que proporciona a su salida un 0 lógico únicamente cuando todas sus entradas están a 1.
Puerta NO-O (NOR)
Símbolo de la función lógica NO-O: a) Contactos, b) Normalizado y c) No normalizado
La puerta lógica NO-O, más conocida por su nombre en inglés NOR, realiza la operación de suma lógica negada. En la figura de la derecha pueden observarse sus símbolos en electrónica.
La ecuación característica que describe el comportamiento de la puerta NOR es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta NOR
Entrada A Entrada B Salida
0 0 1
0 1 0
1 0 0
1 1 0

Podemos definir la puerta NO-O como aquella que proporciona a su salida un 1 lógico sólo cuando todas sus entradas están a 0. La puerta lógica NOR constituye un conjunto completo de operadores.
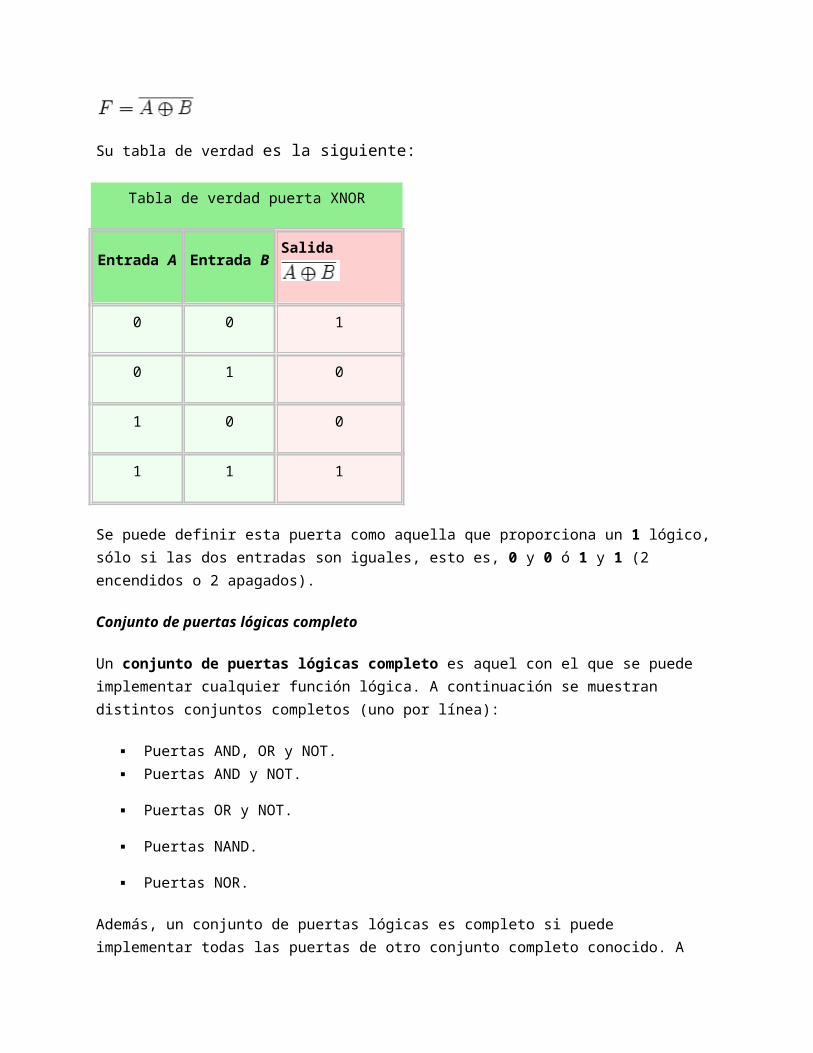
Puerta equivalencia (XNOR)
Símbolo de la función lógica equivalencia: a) Contactos, b) Normalizado y c) No normalizado
La puerta lógica equivalencia, realiza la función booleana AB+~A~B. Su símbolo es un punto (·) inscrito en un círculo. En la figura de la derecha pueden observarse sus símbolos en electrónica. La ecuación característica que describe el comportamiento de la puerta XNOR es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta XNOR
Entrada A Entrada B Salida
0 0 1
0 1 0
1 0 0
1 1 1
Se puede definir esta puerta como aquella que proporciona un 1 lógico, sólo si las dos entradas son iguales, esto es, 0 y 0 ó 1 y 1 (2 encendidos o 2 apagados).

Conjunto de puertas lógicas completo
Un conjunto de puertas lógicas completo es aquel con el que se puede implementar cualquier función lógica. A continuación se muestran distintos conjuntos completos (uno por línea):
Puertas AND, OR y NOT. Puertas AND y NOT.
Puertas OR y NOT.
Puertas NAND.
Puertas NOR.
Además, un conjunto de puertas lógicas es completo si puede implementar todas las puertas de otro conjunto completo conocido. A continuación se muestran las equivalencias al conjunto de puertas lógicas completas con las funciones NAND y NOR.
Conjunto completo de puertas lógicas utilizando sólo puertas NAND. Equivalencias.
Conjunto de puertas lógicas completo :
A BSalida
función NAND(A,B)Salida
función NOR(A,B)
1 1 0 1 1 1 0 0
1 0 0 0 1 0 1 0
0 1 1 0 1 1 1 0
0 0 1 0 0 1 1 1
Equivalencias del conjunto completo anterior con sólo puertas NAND :

Equivalencias del conjunto completo anterior con sólo puertas NOR :
Código binario
El código binario es el sistema de representación de textos, o procesadores de instrucciones de ordenador utilizando el sistema binario (sistema numérico de dos dígitos, o bit: el "0" y el "1"). En informática y telecomunicaciones, el código binario se utiliza con variados métodos de codificación de datos, tales como cadenas de caracteres, o cadenas de bits. Estos métodos pueden ser de ancho fijo o ancho variable.
En un código binario de ancho fijo, cada letra, dígito, u otros símbolos, están representados por una cadena de bits de la misma longitud, como un número binario que, por lo general, aparece en las tablas en notación octal,decimal o hexadecimal.
Según Anton Glaser, en su History of Binary and other Nondecimal Numeration, comenta que los primeros códigos binarios se utilizaron en el año 1932: C.E. Wynn-Williams ("Scale of Two"), posteriormente en 1938:Atanasoff-Berry Computer, y en 1939: Stibitz ("excess three") el código en Complex Computer.
La palabra Wikipedia representada en código binario.
Características del código binario
Ponderación
La mayoría de los sistemas de numeración actuales son ponderados, es decir, cada posición de una secuencia de dígitos tiene asociado un peso. El sistema binario es, de hecho, un sistema de numeración posicional ponderado. Sin embargo, algunos códigos binarios, como el código Gray, no son ponderados, es decir, no tienen un peso asociado a cada posición. Otros, como el mismo código binario natural o el BCD natural sí lo son.
Distancia
La distancia es una característica sólo aplicable a las combinaciones binarias. La distancia entre dos combinaciones es el número de bits que cambian de una a otra. Por ejemplo, si se tienen las combinaciones de cuatro bits 0010 y 0111, correspondientes al 2 y al 7 en binario natural, se dirá que la distancia entre ellas es igual a dos ya que de una a otra cambian dos bits.
Además, con el concepto de distancia se puede definir la distancia mínima de un código. Ésta no es más que la distancia menor que haya entre dos de las combinaciones de ese código.
La distancia es una característica que, además, sólo aplica las combinaciones binarias. En resumen, la distancia entre dos combinaciones es el número de bits que cambian de una a otra.
Continuidad
La continuidad es una característica de los códigos binarios que cumplen que todas las posibles combinaciones del código son adyacentes, es decir, que de cualquier combinación del código a la siguiente cambia un sólo bit. En este caso se dice que el código es continuo. Cuando la última combinación del código es, a su vez, adyacente a la primera, se trata de un código cíclico.
Autocomplementariedad
Se dice que un código binario es autocomplementario cuando el complemento a nueve del equivalente decimal de cualquier combinación del código puede hallarse invirtiendo los valores de cada uno de los bits (operación lógica unaria de negación) y el resultado sigue siendo una combinación válida en ese código. Esta característica se observa en algunos códigos BCD, como el código Aiken o el código BCD exceso 3. Los códigos autocomplementarios facilitan las operaciones aritméticas.
Códigos detectores de error

Los códigos detectores de error y los códigos correctores de error, surgen como solución al problema de la transmisión de datos por medio de impulsos eléctricos. Existen diferentes factores que pueden provocar un cambio en la señal eléctrica en un instante determinado, por lo que, de producirse esto, los datos binarios que están siendo transferidos pueden verse alterados. El propósito de los códigos detectores de error es detectar posibles errores en los datos, mientras que los códigos detectores y correctores de error no sólo pretenden detectar errores, sino también corregirlos. Existen diferentes métodos de detección de errores, el más usado es, posiblemente, el método del bit de paridad. En cuanto a los códigos correctores, destacan algunos como el código de Hamming.
Sistema hexadecimal
Tabla de multiplicar hexadecimal.
El sistema Hexadecimal (no confundir con sistema sexagesimal), a veces abreviado como Hex, es el sistema de numeración de base 16 —empleando por tanto 16 símbolos—. Su uso actual está muy vinculado a la informática y ciencias de la computación, pues los computadores suelen utilizar el byte u octeto como unidad básica de memoria; y, debido a que un byte representa 28 valores posibles, y esto
puede representarse como , que, según elteorema general de la numeración posicional, equivale al número en base 16 10016, dos dígitos hexadecimales corresponden exactamente —permiten representar la misma línea de enteros— a un byte.
En principio, dado que el sistema usual de numeración es de base decimal y, por ello, sólo se dispone de diez dígitos, se adoptó la convención de usar las seis primeras letras del alfabeto latino para suplir los dígitos que nos faltan. El conjunto de símbolos sería, por tanto, el siguiente:
S = {0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F}

Se debe notar que A = 10, B = 11, C = 12, D = 13, E = 14 y F = 15. En ocasiones se emplean letras minúsculas en lugar de mayúsculas. Como en cualquier sistema de numeración posicional, el valor numérico de cada dígito es alterado dependiendo de su posición en la cadena de dígitos, quedando multiplicado por una cierta potencia de la base del sistema, que en este caso es 16. Por ejemplo: 3E0A16 = 3×163 + E×162 + 0×161 + A×160 = 3×4096 + 14×256 + 0×16 + 10×1 = 15882.
El sistema hexadecimal actual fue introducido en el ámbito de la computación por primera vez por IBM en 1963. Una representación anterior, con 0–9 y u–z, fue usada en 1956por la computadora Bendix G-15.
Tabla de conversión entre decimal, binario, octal y hexadecimal

Fracciones
Como el único factor primo de 16 es 2, todas las fracciones que no tengan una potencia de 2 en el denominador, tendrán un desarrollo hexadecimal periódico.
0hex = 0dec = 0oct 0 0 0 0
1hex = 1dec = 1oct 0 0 0 1
2hex = 2dec = 2oct 0 0 1 0
3hex = 3dec = 3oct 0 0 1 1
4hex = 4dec = 4oct 0 1 0 0
5hex = 5dec = 5oct 0 1 0 1
6hex = 6dec = 6oct 0 1 1 0
7hex = 7dec = 7oct 0 1 1 1
8hex = 8dec = 10oct 1 0 0 0
9hex = 9dec = 11oct 1 0 0 1
Ahex = 10dec = 12oct 1 0 1 0
Bhex = 11dec = 13oct 1 0 1 1
Chex = 12dec = 14oct 1 1 0 0
Dhex = 13dec = 15oct 1 1 0 1
Ehex = 14dec = 16oct 1 1 1 0
Fhex = 15dec = 17oct 1 1 1 1

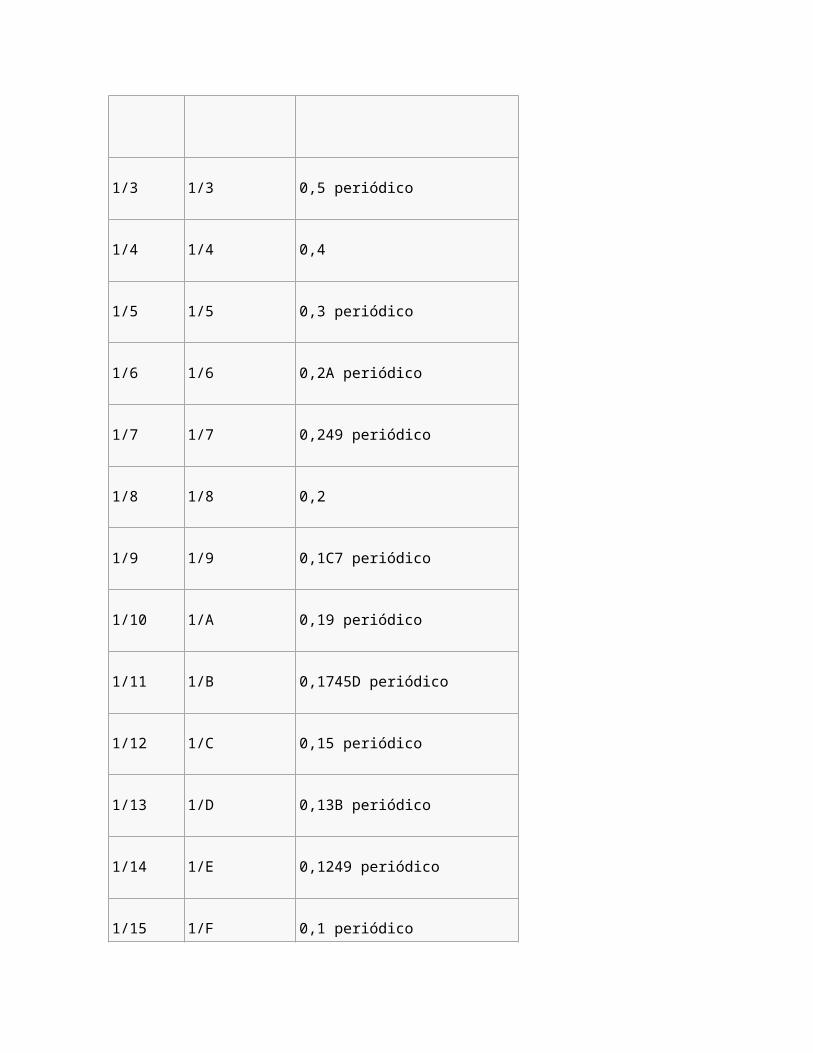
Fracción
Hexadecimal
Resultado en hexadecimal
1/2 1/2 0,8
1/3 1/3 0,5 periódico
1/4 1/4 0,4
1/5 1/5 0,3 periódico
1/6 1/6 0,2A periódico
1/7 1/7 0,249 periódico
1/8 1/8 0,2
1/9 1/9 0,1C7 periódico
1/10 1/A 0,19 periódico
1/11 1/B 0,1745D periódico
1/12 1/C 0,15 periódico
1/13 1/D 0,13B periódico
1/14 1/E 0,1249 periódico

1/15 1/F 0,1 periódico
1/16 1/10 0,1
Existe un sistema para convertir números fraccionarios a hexadecimal de una forma más mecánica. Se trata de convertir la parte entera con el procedimiento habitual y convertir la parte decimal aplicando sucesivas multiplicaciones por 16 hasta convertir el resultado en un número entero.
Por ejemplo: 0,06640625 en base decimal.
Multiplicado por 16: 1,0625, el primer decimal será 1. Volvemos a multiplicar por 16 la parte decimal del anterior resultado: 1. Por lo tanto el siguiente decimal será un 1.Resultado: 0,11 en base hexadecimal. Como el último resultado se trata de un entero, hemos acabado la conversión.
Hay ocasiones en las que no llegamos nunca a obtener un número entero, en ese caso tendremos un desarrollo hexadecimal periódico.
FLIP-FLOP (BIESTABLE)
Los Flip-Flop o Biestable, como también se le conoce, son circuitos secuénciales constituidos por puertas lógicas capaces de almacenar un bit, que es la información binaria más elemental.
Existe una gran variedad de biestables, los cuales se clasifican en:
Asíncronos: R-S ; J-K ; T
Síncronos: Activados por Nivel: R-S ; J-K ; D
Activados por Flanco: Edgetriggered y Master-Slave (maestro-esclavo) R-S; D ; J-K ; T .( en este caso solo veremos el Master-Slave)
Biestable Asíncronos R-S
En la figura uno de los anexos, se muestra simbólicamente el circuito R-S. Posee dos entradas denominadas Reset(R) y Set (S) y dos salidas, Q1 y Q2. Este

dispositivo se puede construir mediante dos puertas NOR o dos puertasNAND, como se puede apreciar en las figuras 2 y 3.
En la tabla 1 se representa la tabla de la verdad válida para los dos casos. Qn es el valor de la salida Q1 en el estado anterior. Qn + 1 es el valor de la salida en el estado presente. Observando la tabla de la verdad podemos comprobar que cuando el valor de las entradas R y S valen cero(0), la salida mantiene el valor anterior (Qn+1=Qn).
Al aplicar un 1 logico a la entrada S, la salida Qn + 1 se pondrá a 1, independientemente del valor que tuviera con anterioridad. Con valor 1, en la entrada R la salida sera cero (0), con independencia del valor anterior. Cuando las dos entradas valgan 1, la salida Qn+1 será cero(0) en el circuito de la figura 2 de puertas NOR , por el contrario será 1 en la figura 3 construido por puertas NAND. Cuando las dos entradas valgan 1, las salidas Qn+1 sera cero (0) en la figura #2 formados por puertas nor, por el contrario será 1 en el de la figura #3 construido con puertas NAND. Las salidas Q1 y Q2 son complementarias en todos los casos, excepto cuando el valor es 1 en las dos entradas simultáneamente. El circuito de puertas NOR se denomina de borrado prioritario, mientras que el formato por puertas NAND se llama de inscripción prioritaria. Analizando la tabla de la verdad (tabla #1), es fácilmente comprobable la capacidad de almacenamiento de estos circuitos. Un 1 aplicado en la entrada S es transmitido a la salida Q, y en ella se mantendrá aunque el valor de S pase a cero (0). La forma de borrar información almacenada en Q es aplicar un 1 en la entrada R.
Biestable Asíncrono J-K
El biestable asíncrono J-K es como el R-S, al cual se le ha eliminado el defecto de funcionamiento cuando las dos entradas valen 1. En este caso Q1 y Q2 siempre son complementarias.
En la figura #4 de los anexos aparece la representación simbólica de este biestable y su tabla de la verdad (tabla #2).
Biestable Asíncrono T
Posee una sola entrada y dos salidas complementarias. Como ya se ha indicado, no se fabrica como tal, pero se construye fácilmente a partir de un biestable J-K, como se puede comprobar en la figura #5 uniendo sus dos entradas.
En la tabla de la verdad # 3, se puede deducir de la correspondiente al J-K observando las líneas donde los valores de las entradas son iguales (J=K=0 y J=K=1). Este biestable divide entre dos la frecuencia de la señal aplicada a su entrada T, como se puede apreciar en el diagrama de tiempos de la figura #6.
Biestables Síncronos Activados Por Nivel
Es esta una de las dos modalidades del sincronismo utilizadas para activar los biestables, es decir, para que la información presente en las entradas produzca efectos a la salida. Para que esto ocurra, en este tipo de biestable, es necesario que la señal de reloj se encuentre a nivel alto. Los cambios que se produzcan en las entradas de información, mientras dicha señal permanezca en este estado, se reflejaran en la salida. De los tres casos que vamos a exponer solamente el de tipo D se encuentra disponible en catalogo.
Biestable Sincrono R-S Activado Por Nivel
La forma más elemental de construir un circuito R-S sincrono consiste en colocar dos puertas AND a la entrada de un R-S Asincrono, tal como se indica en la figura #7. Mientras la señal de reloj permanece en nivel bajo, el valor de las entradas no produce ningun efecto sobre las salidas. Esta señal en nivel alto se convierte en una llave que permite el paso de la información. En la figura #8 se muestran los diagramas de tiempo de las señales de entradas, salidas y de reloj para facilitar la comprensión de esta forma de funcionamiento.
Biestable Sincrono J-K Activado Por Nivel
Se construye de la misma forma de los R-S, es decir, colocando un par de puertas AND a la entrada de un circuitoAsíncrono, tal como se encuentra en la figura #9.
Biestable Sincrono D Activado Por Nivel
Este dispositivo posee una entrada de datos (D), otra de reloj (C) y dos salidas complementarias (Q y Q). Su característica fundamental reside en que el valor de la salida Q es igual que el de la entrada D siempre y cuando la señal de reloj este activa (nivel 1). Cuando la señal de reloj pasa a inactive (nivel 0), el biestable queda enclavado con la información que tuviera en ese momento. Comercialmente es posible encontrar biestables D cuyo nivel activo es el cero (0). En la figura #10 aparece la representación simbolica de este biestable y en la tabla de la verdad #4 donde se establece la relación entre las entradas y las salidas.
A este tipo de biestable se le conoce también con el nombre de LATCH o cerrojo, y existe una gran variedad de circuitos integrados disponibles en catalogo. En el diagrama de tiempo o cronograma se muestra en la figura #11, en el se establece la relación entre las señales de reloj, de datos y salidas.
Biestable Sincronos Activados por Flanco

Como hemos comprobado en los biestables activados por nivel los cambios producidos en las entradas, mientras permanece la señal de reloj en nivel activo, se reflejan en la salida. Esta forma de funcionamiento puede ocasionar problemas cuando la conmutación en las señales de entradas se realiza con una frecuencia elevada. Reducir el tiempo de duración del nivel activo no es una solución suficiente, ya que este, por otra parte, debe ser lo suficientemente largo como para permitir la conmutación de los dispositivos más lentos que forman parte del sistema.
Los FLIP-FLOPS integrados adoptan algunas de las dos soluciones que se describen a continuación: a) Configuración EDGE-TRIGGERED.
b) Configuración MASTER-SLAVE
(Nota: como aviamos mencionado anteriormente solo veremos la configuración MASTER-SLAVE)
Configuración Master-Slave: Esta constituido por dos etapas. Para entender con mayor facilidad su funcionamiento utilizaremos el esquema de la figura #12, formados por dos biestables R-S Asíncrono, cuatro puertas AND y una inversora (7404).
Cuando la señal de reloj pasa de nivel cero (0) a nivel uno (1), la información presente en las entradas R-S del circuito entra al primer biestable, denominado Master, a través de las puertas Y1 e Y2. En este estado de la señal de reloj las entradas del segundo biestable, llamado Slave, permanecen cerradas, ya que el valor de salidas de las puertas Y3 e Y4 es cero (0).
Al pasar la señal de reloj a nivel cero (0), la información almacenada en el Master pasa al Slave porque ahora esta señal abre las puertas Y3 e Y4. En estas circunstancias las puertas Y1 e Y2 permanecerán cerradas y, en consecuencia, los cambios producidos en las entradas principales del circuito no seran captados por el Master.
Biestable Sincrono J-K Activado Por Flanco
La mayor parte de los Biestables J.-K comerciales activados por flanco, de la misma manera que los Flip-Flop tipo D, son del tipo edge-triggered; sin embargo, para ilustrar este apartado hemos elegido un circuito Master-Slave, con el fin de proporcionar una visión completa de todas las formas de disparo.
El C.I. 7473 contiene dos biestables de tipo J-K Master-Slave disparado por flanco de bajada. La constitución interna de cada uno de ellos se aproxima al modelo mostrado de la figura #13.

Este circuito posee dos entradas de datos (J-K), y una entrada de reloj, independientes para cada biestable. Las salidas son complementarias. Los datos de las entradas son procesados después de un impulso completo de reloj. Mientras este permanece en nivel bajo el Slave esta incomunicado del Master. En la transición positiva de reloj los datos de J y K se transfieren al master. En la transición negativa del reloj la información del Master pasa al Slave. Los estados lógicos de las entradas J y K debe mantenerse constantes mientras la señal de reloj permanece en nivel alto. Los datos se transfieren a la salida en el flanco de bajada de la señal de Reloj. Aplicando un nivel bajo a la entrada clear (clr) la salida Q se pondrá a nivel bajo, independientemente del valor de las otras entradas.
Cuando las dos entradas J y K están en nivel bajo y se aplica un impulso de reloj, las salidas permanecerán con el valor que tuvieran anteriormente. Los valores Q0 y Quo de la tabla indican el estado de la salida anterior a la aplicación del impulso de la señal de reloj. El estado de TOGGLE quiere decir que las salidas tomaran el valor complementario al que tuvieran previamente cada vez que aparezca un impulso de reloj. Para ello es necesario que las entradas J y K se encuentren en nivel alto
Biestable
Un biestable (flip-flop en inglés), es un multivibrador capaz de permanecer en uno de dos estados posibles durante un tiempo indefinido en ausencia de perturbaciones.1 Esta característica es ampliamente utilizada enelectrónica digital para memorizar información. El paso de un estado a otro se realiza variando sus entradas. Dependiendo del tipo de dichas entradas los biestables se dividen en:
Asíncronos: sólo tienen entradas de control. El más empleado es el biestable RS.
Síncronos: además de las entradas de control posee una entrada de sincronismo o de reloj. Si las entradas de control dependen de la de sincronismo se denominan síncronas y en caso contrario asíncronas. Por lo general, las entradas de control asíncronas prevalecen sobre las síncronas.
La entrada de sincronismo puede ser activada por nivel (alto o bajo) o por flanco (de subida o de bajada). Dentro de los biestables síncronos activados por nivel están los tipos RS y D, y dentro de los activos por flancos los tipos JK, T y D.
Los biestables se crearon para eliminar las deficiencias de los latches.

Biestable RS
Descripción
Cronograma del biestable RS.
Dispositivo de almacenamiento no temporal de 14 estados (alto y bajo), cuyas entradas principales permiten al ser activadas:
R: el borrado (reset en inglés), puesta a 0 ó nivel bajo de la salida. S: el grabado (set en inglés), puesta a 1 ó nivel alto de la salida
Si no se activa ninguna de las entradas, el biestable permanece en el estado que poseía tras la última operación de borrado o grabado. En ningún caso deberían activarse ambas entradas a la vez, ya que esto provoca que las salidas directa (Q) y negada (Q') queden con el mismo valor: a bajo, si el flip-flop está construido con puertas NOR, o a alto, si está construido con puertas NAND. El problema de que ambas salidas queden al mismo estado está en que al desactivar ambas entradas no se podrá determinar el estado en el que quedaría la salida. Por eso, en las tablas de verdad, la activación de ambas entradas se contempla como caso no deseado (N. D.).

Biestable RS (Set Reset) asíncrono
Sólo posee las entradas R y S. Se compone internamente de dos puertas lógicas NAND o NOR, según se muestra en la siguiente figura:
Biestables RS con puertas NOR (a), NAND (c) y sus símbolos normalizados respectivos (b) y (d).
Tabla de verdad biestable RS
R S Q (NOR) Q' (NAND)
0 0 q N. D.
0 1 1 0
1 0 0 1
1 1 N. D. q
N. D.= Estado no deseado q= Estado de memoria

Biestable RS (Set Reset) síncrono
Circuito Biestable RS síncrono a) y esquema normalizado b).
Además de las entradas R y S, posee una entrada C de sincronismo cuya misión es la de permitir o no el cambio de estado del biestable. En la siguiente figura se muestra un ejemplo de un biestable síncrono a partir de una asíncrona, junto con su esquema normalizado:
Su tabla de verdad es la siguiente:
Tabla de verdad biestable RS
C R S Q (NOR)
0 X X q
1 0 0 q
1 0 1 1
1 1 0 0
1 1 1 N. D.
X=no importa

Biestable D (Delay)
Símbolos normalizados: Biestables D a) activo por nivel alto y b) activo por flanco de bajada.
El flip-flop D resulta útil cuando se necesita almacenar un único bit de datos (1 o 0). Si se añade un inversor a un flip-flop S-R obtenemos un flip-flop D básico. El funcionamiento de un dispositivo activado por el flanco negativo es, por supuesto, idéntico, excepto que el disparo tiene lugar en el flanco de bajada del impulso del reloj. Recuerde que Q sigue a D en cada flanco del impulso de reloj.
Para ello, el dispositivo de almacenamiento temporal es de dos estados (alto y bajo), cuya salida adquiere el valor de la entrada D cuando se activa la entrada de sincronismo, C. En función del modo de activación de dicha entrada de sincronismo, existen dos tipos:
Activo por nivel (alto o bajo), también denominado registro o cerrojo (latch en inglés).
Activo por flanco (de subida o de bajada).
La ecuación característica del biestable D que describe su comportamiento es:
y su tabla de verdad:
D Q Qsiguiente
0 X 0
1 X 1
X=no importa

Esta báscula puede verse como una primitiva línea de retardo o una retención de orden cero (zero order hold en inglés), ya que los datos que se introducen, se obtienen en la salida un ciclo de reloj después. Esta característica es aprovechada para sintetizar funciones de procesamiento digital de señales (DSP en inglés) mediante la transformada Z.
Biestable T (Toggle)
Símbolo normalizado: Biestable T activo por flanco de subida.
Dispositivo de almacenamiento temporal de dos estados (alto y bajo). El biestable T cambia de estado ("toggle" en inglés) cada vez que la entrada de sincronismo o de reloj se dispara mientras la entrada T está a nivel alto. Si la entrada T está a nivel bajo, el biestable retiene el nivel previo. Puede obtenerse al unir las entradas de control de un biestable JK, unión que se corresponde a la entrada T.
La ecuación característica del biestable T que describe su comportamiento es:
y la tabla de verdad:
T Q Qsiguiente
0 0 0
0 1 1
1 0 1
1 1 0

Biestable JK (Jack Kilby)
Es versátil y es uno de los tipos de flip-flop mas usados. Su funcionamiento es idéntico al del flip-flop S-R en las condiciones SET, RESET y de permanencia de estado. La diferencia está en que el flip-flop J-K no tiene condiciones no validas como ocurre en el S-R.
Este dispositivo de almacenamiento es temporal que se encuentra dos estados (alto y bajo), cuyas entradas principales, J y K, a las que debe el nombre, permiten al ser activadas:
J: El grabado (set en inglés), puesta a 1 ó nivel alto de la salida. K: El borrado (reset en inglés), puesta a 0 ó nivel bajo de la salida.
Si no se activa ninguna de las entradas, el biestable permanece en el estado que poseía tras la última operación de borrado o grabado. A diferencia del biestable RS, en el caso de activarse ambas entradas a la vez, la salida adquirirá el estado contrario al que tenía.
La ecuación característica del biestable JK que describe su comportamiento es:
Y su tabla de verdad es:
J K Q Qsiguiente
0 0 0 0
0 0 1 1
0 1 X 0
1 0 X 1
1 1 0 1
1 1 1 0

X=no importa
Una forma más compacta de la tabla de verdad es (Q representa el estado siguiente de la salida en el próximo flanco de reloj y q el estado actual):
J K Q
0 0 q
0 1 0
1 0 1
1 1
El biestable se denomina así por Jack Kilby, el inventor de los circuitos integrados en 1958, por lo cual se le concedió el Premio Nobel en física de 2000.
Biestable JK activo por flanco
Símbolos normalizados: Biestables JK activo a) por flanco de subida y b) por flanco de bajada
Junto con las entradas J y K existe una entrada C de sincronismo o de reloj cuya misión es la de permitir el cambio de estado del biestable cuando se produce un flanco de subida o de bajada, según sea su diseño. Su denominación en inglés es J-K Flip-Flop Edge-Triggered. De acuerdo con la tabla de verdad, cuando las entradas J y K están a nivel lógico 1, a cada flanco activo en la entrada de reloj, la salida del biestable cambia de estado. A este modo de funcionamiento se le denomina modo de basculación (toggle en inglés).

Biestable JK Maestro-Esclavo
Símbolos normalizados: Biestable JK Maestro-Esclavo a) activo por nivel alto y b) activo por nivel bajo
Aunque aún puede encontrarse en algunos equipos, este tipo de biestable, denominado en inglés J-K Flip-Flop Master-Slave, ha quedado obsoleto ya que ha sido reemplazado por el tipo anterior.
Su funcionamiento es similar al JK activo por flanco: en el nivel alto (o bajo) se toman los valores de las entradas J y K y en el flanco de bajada (o de subida) se refleja en la salida.
Otra forma de expresar la tabla de verdad del biestable JK es mediante la denominada tabla de excitación:
q Q J K 0 0 0 X 0 1 1 X 1 0 X 1 1 1 X 0
Siendo q el estado presente y Q el estado siguiente.

La ecuación característica del flip flop jk es: Q(t+1)=JQ´+K´Q la cual se obtiene de la tabla característica del flip flop.
Ejemplo con componentes discretos
Figura 1.- Circuito multivibrador biestable
Aunque, en general, los biestables utilizados en la práctica están implementados en forma de circuitos integrados, en la Figura 1 se representa el esquema de un sencillo circuito multivibrador biestable, realizado con componentes discretos, cuyo funcionamiento es el siguiente:
Al aplicar la tensión de alimentación (Vcc), los dos transistores iniciaran la conducción, ya que sus bases reciben un potencial positivo, TR-1 a través del divisor formado por R-3, R-4 y R-5 y TR-2 a través del formado por R-1, R-2 y R-6, pero como los transistores no serán exactamente idénticos, por el propio proceso de fabricación y el grado de impurezas del material semiconductor, uno conducirá antes o más rápido que el otro.
Supongamos que es TR-1 el que conduce primero. El voltaje en su colector disminuirá, debido a la mayor caída de tensión en R-1, por lo que la tensión aplicada a la base de TR-2 a través del divisor formado por R-2, R-5, disminuirá haciendo que este conduzca menos. Esta disminución de conducción de TR-2 hace que suba su tensión de colector y por tanto la de base de TR-1, este proceso llevará finalmente al bloqueo de TR-2 (salida Y a nivel alto).

Pero si ahora aplicamos un impulso de disparo de nivel alto por la entrada T, a través de los condensadores C-1 y C-2 pasará a las bases de ambos transistores. En el caso de TR-1 no tendrá más efecto que aumentar su tensión positiva, por lo que este seguirá conduciendo. En la base de TR-2 el impulso hará que este transistor conduzca, realizándose un proceso similar al descrito al principio, cuando el que conducía primero era TR-1, que terminará bloqueando a este y dejando en conducción a TR-2 (salida Y a nivel bajo).
La secuencia descrita se repetirá cada vez que se aplique un impulso en T. La salida cambia de estado con el impulso de disparo y permanece en dicho estado hasta la llegada del siguiente impulso, momento en que volverá a cambiar.
La caída de tensión en la resistencia común de emisores (R-7) elimina la indecisión del circuito y aumenta la velocidad de conmutación.
Aplicación
Un biestable puede usarse para almacenar un bit. La información contenida en muchos biestables puede representar el estado de un secuenciador, el valor de un contador, un carácter ASCII en la memoria de un ordenador, o cualquier otra clase de información.
Un uso corriente es el diseño de máquinas de estado finitas electrónicas. Los biestables almacenan el estado previo de la máquina que se usa para calcular el siguiente.
El T es útil para contar. Una señal repetitiva en la entrada de reloj hace que el biestable cambie de estado por cada transición alto-bajo si su entrada T está a nivel 1. La salida de un biestable puede conectarse a la entrada de reloj de la siguiente y así sucesivamente. La salida final del conjunto considerado como una cadena de salidas de todos los biestables es el conteo en código binario del número de ciclos en la primera entrada de reloj hasta un máximo de 2n-1, donde n es el número de biestables usados.
Uno de los problemas con esta configuración de contador (ripple counter en inglés) es que la salida es momentáneamente inválida mientras los cambios se propagan por la cadena justo después de un flanco de reloj. Hay dos soluciones a este problema. La primera es muestrear la salida sólo cuando se sabe que esta es válida. La segunda, más compleja y ampliamente usada, es utilizar un tipo diferente de contador síncrono, que tiene una lógica más compleja para asegurar que todas las salidas cambian en el mismo momento predeterminado, aunque el precio a pagar es la reducción de la frecuencia máxima a la que puede funcionar.

Una cadena de biestables T como la descrita anteriormente también sirve para la división de la frecuencia de entrada entre 2n, donde n es el número de biestables entre la entrada y la última salida.
Secuenciación y metaestabilidad
Los biestables síncronos son propensos a sufrir un problema denominado metaestabilidad, que ocurre cuando una entrada de datos o de control está cambiando en el momento en el que llega un flanco de reloj. El resultado es que la salida puede comportarse de forma imprevista, tardando muchas veces más de lo normal en estabilizarse al estado correcto, o incluso podría oscilar repetidas veces hasta terminar en su estado estable. En un ordenador esto puede suponer la corrupción de datos o causar un fallo de programa.
En muchos casos, la metaestabilidad en los biestables se puede evitar asegurándose de que los datos y las entradas de control se mantienen constantes durante un periodo de tiempo especificado antes y después del flanco de reloj, denominados setup time (tsu) y hold time (th) respectivamente. Esos tiempos están establecidos en la hoja de datos del dispositivo en cuestión, y son típicamente entre unos pocos nanosegundos y unos pocos cientos de picosegundos para dispositivos modernos.
Desafortunadamente, no siempre es posible cumplir estos requisitos, porque los biestables pueden estar conectados a entradas en tiempo real que son asíncronas, y pueden cambiar en cualquier momento fuera del control del diseñador. En este caso, lo único que puede hacerse es reducir la probabilidad de error a un determinado nivel, dependiendo de la fiabilidad que se desee del circuito. Una técnica para reducir la incidencia es conectar dos o más biestables en cadena, de forma que la salida de una se conecta a la entrada de la siguiente, y con todos los dispositivos compartiendo la misma señal de reloj. De esta forma la probabilidad de un suceso metaestable puede reducirse considerablemente, pero nunca podrá eliminarse por completo.
Existen biestables robustos frente a la metaestabilidad, que funcionan reduciendo los tiempos de setup y hold en todo lo posible, pero incluso estos no pueden eliminar por completo el problema. Esto es debido a que la metaestabilidad es mucho más que un problema de diseño. Cuando el flanco de reloj y la entrada de datos están suficientemente juntos, el biestable tiene que elegir el evento que ocurrió antes. Y por más rápido que se haga el dispositivo, siempre existe la posibilidad de que sucedan lo suficientemente juntos como para que no se pueda detectar cual es el que ocurrió primero. Así pues, es lógicamente imposible el construir un biestable a prueba de metaestabilidad.

Otro parámetro temporal importante de un biestable es el retardo reloj-a-salida (clock-to-output tCO) o retardo de propagación (propagation delay tP), que es el tiempo que el biestable tarda en cambiar su salida tras un flanco de reloj. El tiempo para una transición alto-a-bajo (tPHL) es a veces diferente del de las transiciones de bajo-a-alto (tPLH).
Cuando se conectan biestables en cadena, es importante asegurar que el tCO del primero es mayor que el hold time (tH) del siguiente, ya que en caso contrario, el segundo biestable no recibirá los datos de forma fiable. La relación entre tCO y tH está garantizada normalmente si ambos biestables son del mismo tipo.
Referencias1. ↑ Steven H. Strogatz (2001). Nonlinear Dynamics and Chaos. Westview Press. ISBN 9780738204536.
Reloj digital con un microcontrolador, pic 16F84A
Este circuito está basado en un proyecto de Dan Matthews de reloj digital publicado por la casa Microchip bajo la referencia AN590, lo puedes consultar aquí. Afortunadamente y gracias a Dennis Crawley el programa original para el pic 16C54 ha sido adaptado y puede ser utilizado con un pic más actual, el 16F84A, conservando el mismo circuito. Nosotros hemos hecho algunas modificaciones de hardware sobre el circuito original, haciéndolo aún más simple. También hemos añadido una fuente de alimentación con una pila para que si se va la electricidad no

se pierda la hora.

El circuito es realmente pequeño por lo que nos puede servir como reloj de mesita de noche o como reloj de escritorio sin ocupar demasiado. Además y para facilitar más las cosas hemos puesto en marcha un sevicio de grabación del microcontrolador. En concreto y sobre este reloj digital puedes ver al final del artículo de qué manera puedes adquirir el microcontrolador pic 16F84A de este circuito ya grabado y listo para funcionar. El circuito impreso que hemos preparado está compuesto por dos placas puestas en "sándwich" y las pistas en algunos casos están bastante juntas, por lo que deberás prestar mucha atención a la hora de hacer el circuito impreso y de hacer las soldaduras.
Lo primero es echar un vistazo al circuito original.

El circuito se compone del pic, los displays, el oscilador a cuarzo, unas cuantas resistencias y los interruptores de ajuste. Nosotros proponemos éste otro circuito. Está compuesto por dos placas superpuestas. En una de ellas pondremos la visualización, los displays. Y en la otra el resto de componentes, a excepción del transformador y la pila. El esquema de la placa número uno sería este.
El diseño de la placa de circuito impreso.

Hemos diseñado un tercer conector (conector3, arriba a la derecha) dejando la posibilidad de incluir en otra tercera placa el transformador y la pila. Ésta última placa no la hemos diseñado. El rectificador y el condensador C6 (1000uF) van en la cara bottom, Obsevar que está el nombre y el valor al revés.
Ahora echemos un vistazo al esquema de la placa número 2, la de la visualización en los displays.

Tenemos dos conectores para interconexionar la placa principal, la placa número 1, con los displays. El diseño de la placa número 2 se ha basado en la anchura de los dispalys. Cada uno mide 12 milímetros.

Las medidas reales son 53x38 milímetros, que en realidad es poco más de lo que ocupan los displays.
Recordad que el esquema y el circuito han de estar en la misma carpeta y llamarse igual, sólo cambia la extensión sch para el esquema y brd para la placa, de esta manera son reconocidos y asociadas ambas por el Eagle.
Algunas consideraciones importantes:
Se han quitado los transistores del diseño original (2N5401) y las resistencias que iban a la base de los mismos. Con esto hemos simplificado el diseño, pero hay que respetar que las resistencias R1 a R8 no sean menores de 150 ohmios. Con resistencias de 220 ohmios y displays tipo kingbright sc52-11srwa hemos conseguimos un brillo en los displays más que suficiente como para ver en un ambiente luminoso. Si vamos a utilizar el reloj como mesita de noche es aconsejable aumentar el valor de las resistencias para que no moleste en la oscuridad. También hemos quitado el pulsador que conectaba la pata MCLR del integrado con la masa. Dicho pulsador pone la hora en 12:00 que es el valor marcado cuando se inicia el reloj.