TÉCNICAS DE INYECCIÓN PARA LA ESTIMACIÓN DE ÁNGULO ...
125
UNIVERSITAT POLITÈCNICA DE CATALUNYA MÁSTER EN INGENIERÍA ELECTRÓNICA TESIS DE MÁSTER TÉCNICAS DE INYECCIÓN PARA LA ESTIMACIÓN DE ÁNGULO EN UN MOTOR DE IMANES PERMANENTES BAJO CONTROL DESLIZANTE ALUMNO: VÍCTOR REPECHO DEL CORRAL. DIRECTORES: ANTONI ARIAS PUJOL; DOMINGO BIEL SOLÉ. BARCELONA, JULIO 2011.
Transcript of TÉCNICAS DE INYECCIÓN PARA LA ESTIMACIÓN DE ÁNGULO ...

UNIVERSITAT POLITÈCNICA DE CATALUNYA
MÁSTER EN INGENIERÍA ELECTRÓNICA
TESIS DE MÁSTER
TÉCNICAS DE INYECCIÓN PARA LA
ESTIMACIÓN DE ÁNGULO EN UN
MOTOR DE IMANES PERMANENTES
BAJO CONTROL DESLIZANTE
ALUMNO: VÍCTOR REPECHO DEL CORRAL.
DIRECTORES: ANTONI ARIAS PUJOL; DOMINGO BIEL SOLÉ.
BARCELONA, JULIO 2011.


Resumen del Proyecto
Estudio de diferentes técnicas para la estimación de posición de rotor en un Motor Síncrono
de Imanes Permanentes (PMSM), basadas en inyección de señales de prueba y
observadores, eliminando la necesidad de sensores de posición en el esquema, utilizando
esquemas basados en control deslizante (SMC).
Resum del Projecte
Estudi de diferents tècniques per a l'estimació de posició de rotor en un Motor Síncron
d’imans permanents (PMSM), basades en injecció de senyals de test i observadors,
eliminant la necessitat d’emprar sensors de posició, utilitzant esquemes basats en control en
mode lliscament(SMC).
Abstract
Study of different techniques for the rotor position estimation of a Permanent Magnet
Synchronous Motor (PMSM), based on signal test injection and state space observers. The
goal of the previous methodology is the possibility to remove the sensor from the system.
The full control of the machine is implemented by Sliding mode Control (SMC).


CONTENIDO
I. INTRODUCCIÓN.
1.1 Objetivos de la Investigación………… ……………………………………….1
1.2 Definición de los Casos de Simulación……………………………………….3
II. LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC.
2.1 Introducción a las Máquinas Eléctricas……………………………………….9
2.2 Caracterización del PMSM. …………….…………………………………….13
2.3 Esquema de Control FOC……………………………………………………..18
2.4 Esquema de Control DTC………………………………………………….….21
III. APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
3.1 Introducción al Control Deslizante…………………………………………..27
3.2 Control Deslizante por Corrientes DQ. Control Indirecto de Par…………33
3.3 Control Deslizante por Corrientes DQ. Control de Velocidad…………….39
3.4 Control Integral Deslizante de Velocidad…………………………………...45
IV. ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE.
4.1 Introducción a las Técnicas de Estimación…………………………………..54
4.2 Inyección de Alta Frecuencia en Tensiones αβ. Problemática……………..61
4.3 Inyección en dq y Estimación Mediante Control Equivalente……………..64
4.4 Inyección en αβ y Estimación Mediante Procesado de Señal……………..71
V. SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE
5.1 Introducción…………………………………………………………………….82
5.2 Sistema Sensorless Mediante Inyección de Frecuencia en Corriente
y Procesado de Señal. Control Deslizante de Corrientes y Control Externo PI de Velocidad……………..……………………………....83
5.3 Sistema Sensorless Mediante Inyección de Frecuencia en Corriente y Procesado de Señal. Control de Posición…………………………………….96
5.4 Sistema Sensorless Para Velocidades Medio-Altas Basado en Observador Deslizante ………………………………………………………100
VI. CONCLUSIONES
6.1 Conclusiones…………………………………………………………………112 6.2 Futuras Líneas de Investigación……………………………………………114
VII. BIBLIOGRAFÍA
7.1 Bibliografía Básica…………………………………………………………...116
7.2 Artículos en Revistas y Congresos…………………………….…………...116


- 1 -
CAPÍTULO 1.
INTRODUCCIÓN.
1.1 OBJETIVOS DE LA INVESTIGACIÓN. El punto de partida para el estudio que se plantea en el presente trabajo, surge de las asignaturas del Máster de Ingeniería electrónica Control de Potencia en
Sistemas de Energías Renovables (CPSER) y Convertidores de Energía en Corriente
alterna (CECA). En ellas se introducen las temáticas principales de este proyecto.
Por un lado, en CPSER se desarrolla el control en modo deslizamiento, con aplicaciones prácticas a convertidores de potencia, básicamente, a diferentes estructuras de conversión destinadas a las aplicaciones fotovoltaicas. En CECA, se estudian diferentes topologías de conversión de potencia con salidas de tensiones/corrientes alternas, destinadas en algunos casos, para aplicaciones de control sobre máquinas eléctricas, presentándose los motores de inducción y síncrono de imán permanente como los de mayor interés de estudio.
1.1.1 Esquema de Control Alternativo
El primer objetivo que se plantea en la investigación es el desarrollo de un esquema de control alternativo para la máquina síncrona de imanes permanentes (PMSM), difiriendo de las técnicas clásicas de control, el Field Oriented Control (FOC) y el Direct Torque Control (DTC). Este control objeto de estudio es el control en modo deslizamiento (SMC).
El controlador FOC aporta: Ventajas
• Utiliza un Modelo linealizado de Primer orden. • Controladores Lineales bajo teoría clásica de Control. • Trabaja con Etapas de Potencia a frecuencia Fija. • Ampliamente Conocido. Abundante Bibliografía de Referencia.

INTRODUCCIÓN
- 2 -
Desventajas
• Respuesta lenta de Par debido a los controles Lineales. • Modelo de Control diferente al real, debido a la linealización. • Posible desintonización de los controladores debido a derivas en el
sistema. • Necesidad del Uso de las transformadas de Park y Clarke. Modelo en
dq. El controlador DTC aporta: Ventajas
• Trabaja sobre la Planta Real. Sin linealización. • Utiliza look-up tables definidas para implementar el control. • No es necesario el uso de las transformadas de Park y Clarke. • A priori, el encoder de posición/velocidad no es necesario. • Respuesta muy rápida de Par.
Desventajas
• Sistema de Frecuencia Variable. Degradación de la respuesta a muy bajas velocidades.
• Aunque no se utilizan las transformadas de Park y Clarke, el correcto empleo de las tablas de conmutación necesita de la información de posición de rotor.
• Para control de velocidad se necesita un lazo adicional. Además es necesario la lectura de Velocidad mediante encoder.
A partir de aquí, se analiza que se puede aportar al control de la máquina mediante técnicas de control en modo deslizamiento, en función de lo expuesto hasta ahora. El control en modo deslizamiento aportará ventajas respecto a los dos sistemas propuestos hasta ahora, y de igual forma alguna desventaja.
El control SMC aporta:
Ventajas
• Trabaja sobre la Planta Real. Sin linealización. • No se utiliza ninguna look-up table. Controladores por histéresis. • Respuesta muy rápida de Par. • Reducción del orden del sistema. • Altamente inherente a cualquier variación de la planta.

CAPÍTULO 1
- 3 -
Desventajas.
• Sistema de Frecuencia Variable. • Control en Modo deslizamiento sobre sistema dq . Necesidad de las
transformadas de Park y Clarke. Necesidad de Encoder de posición/velocidad.
1.1.2 Sistema Sensorless Sobre Controladores No lineales.
El siguiente objetivo de la investigación es el empleo de técnicas de estimación de la posición de rotor bajo controladores no lineales, siendo éstos el DTC y SMC. Concretamente se estudiará el caso en que el motor se encuentra girando a bajas vueltas o está ocasionalmente parado. Existen técnicas basadas en la inyección de señales de alta frecuencia que dan buenos resultados trabajando bajo esquema de control FOC. Debido a las características de los controladores no lineales, estas técnicas presentan problemas para el empleo de dichas inyecciones, debido a su mayor ancho de banda, de manera que cancelan de manera natural las señales de inyección.
A partir de aquí, se desarrollará un esquema de inyección que permita la estimación de posición a bajas velocidades, trabajando bajo un control no lineal, concretamente el SMC. De igual forma, se demostrará como los algoritmos de estimación funcionan correctamente a bajas vueltas, degradándose con velocidades altas. Por ello, se estudia el empleo de observadores en modo deslizamiento para el uso en regímenes de vueltas altos, donde la inyección de señal no es necesaria.
1.2 DEFINICIÓN DE LOS CASOS DE SIMULACIÓN.
Durante el desarrollo del diseño de los controladores en modo deslizamiento, y los esquemas de estimación de posición, se incluirán simulaciones validando el correcto funcionamiento de lo desarrollado. Para ello, se pretende en este punto la definición de unos casos de simulación patrones, los cuales serán ensayados por los diferentes tipos de control o esquemas de estimación propuestos.
En el capítulo 3 se desarrollan los esquemas de control del PMSM utilizando controladores en modo deslizamiento, por lo que después de una propuesta de diseño de los controladores, se efectuaran una batería de simulaciones para corroborar el buen funcionamiento.

INTRODUCCIÓN
- 4 -
En el capítulo 4 se desarrollan esquemas de inyección para la estimación de posición/velocidad del rotor, trabajando sobre control en modo deslizamiento. Estos esquemas de control utilizan las variables reales en las realimentaciones y transformadas, es decir no son sistemas sensorless.
En el capítulo 5 los sistemas de estimación son probados realimentando las variables estimadas a los lazos de control y a las transformadas, siendo sistemas sensorless.
Los casos de simulación se definen a continuación.
SIMULACIÓN CASO 1.
INVERSIÓN DE GIRO A VELOCIDAD Y PAR NOMINAL
Descripción: Se realizará un arranque del motor de velocidad nula a velocidad nominal, con el par nominal de carga aplicado. Además, una vez estabilizada la velocidad se efectúa una inversión de giro. La consigna de velocidad aplicada al motor en función del tiempo se define a continuación.

CAPÍTULO 1
- 5 -
SIMULACIÓN CASO 2.
ARRANQUE A VELOCIDAD NOMINAL CON VARIACIÓN DE PAR
Descripción: Con la velocidad fijada a 300 rad/s durante todo el ensayo, y después de que se haya estabilizado, se efectúa una variación de par a valor nominal. La consigna de par aplicado en función del tiempo se define a continuación.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
Tiempo (s)
SIMULACIÓN CASO 3.
INVERSIÓN DE GIRO AL 1% DE VELOCIDAD LA NOMINAL Y PAR NOMINAL
Descripción: Se realizará un arranque del motor al 1% de la velocidad nominal, con el par nominal de carga aplicado. Además, una vez estabilizada la respuesta se efectúa una inversión de giro al -1% de la velocidad nominal. La consigna de velocidad aplicada en función del tiempo se define a continuación.

INTRODUCCIÓN
- 6 -
SIMULACIÓN CASO 4.
VARIACIÓN DE PAR DE 0 A NOMINAL CON REFERENCIA DE VELOCIDAD NULA
Descripción: Con referencia de velocidad nula y sin par aplicado, se efectúa un cambio a par nominal, para después volver a la condición de par nulo. Las variaciones de par aplicado se muestran a continuación.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
Tiempo (s)
SIMULACIÓN CASO 5.
CONTROL DE POSICIÓN Y VARIACIÓN DE PAR
Descripción: Control de posición con variación de par. Se efectúan cambios en la posición de referencia y par aplicado al motor para observar la respuesta del sistema. Las consigna de posición y par aplicado en función del tiempo se muestran a continuación.
Par (Nm)

CAPÍTULO 1
- 7 -
SIMULACIÓN CASO 6.
CONTROL INDIRECTO DE PAR
Descripción: Control directo sobre la corriente en q. Siendo indirectamente un control indirecto de Par. Las consignas de par aplicadas varían en función del tiempo como se muestra a continuación.
Por último se define las características del motor ensayado en la tabla 1.
TABLA I
MOTOR DE IMANES PERMANENTES UTILIZADO EN LAS SIMULACIONES
Potencia Nominal 3.8 kW
Par de Polos 6 Velocidad / Torque 314.15 rad/s / 12.2 Nm
Rs / Ld / Lq 0.94 Ω / 7 mH / 8.3 mH Flujo Magnetico 0.2515 Wb
Fricción Mecánica 0.03833 Nms Momento de Inercia 20.5 kgcm2
De los casos de simulación propuestos anteriormente, se presentarán las variables de interés en función del esquema que se esté probando, poniendo énfasis en las variables de control cuando se ensaye los controladores en el capítulo 3, y haciéndolo en las variables a estimar en las simulaciones dentro de los capítulos 4 y 5.

9
CAPÍTULO 2.
LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC.
2.1 INTRODUCCIÓN A LAS MÁQUINAS ELÉCTRICAS.
En los últimos tiempos, uno de los campos que más investigación ha originado en el ámbito de la ingeniería ha sido, sin duda, el estudio de nuevas técnicas para el control de la operación de las máquinas eléctricas. Las máquinas eléctricas (se utilizará indistintamente a lo largo del trabajo el término máquina o motor,
por trabajar para los estudios presentados siempre como motor), vienen siendo utilizadas en los procesos industriales desde hace mucho tiempo, siendo elementos imprescindibles en cualquier tipo de industria, además de ser empleados en numerosos electrodomésticos cotidianos. Desde los pequeños motores de corriente continua, hasta las más potentes máquinas de inducción, todos tienen controles más o menos complejos en función de las necesidades de la aplicación. Asiduamente, el control sobre las máquinas es efectuado sobre la velocidad y par producido.
Sin duda alguna, varios aspectos íntimamente relacionados con la ingeniería electrónica han influido de manera muy importante en la evolución de estos procesos de control. Por un lado, la tecnología de fabricación microelectrónica ha permitido el aumento de la potencia de cálculo de los procesadores digitales, permitiendo así la aplicación de algoritmos y técnicas de control las cuales hace un tiempo atrás eran impensables. De igual forma, los avances en las técnicas de conversión de potencia eléctrica, disciplina comúnmente conocida como electrónica de potencia, han desembocado en equipos cada vez más eficientes, versátiles, compactos y ligeros.
Actualmente, y en la historia más reciente, las máquinas más utilizadas en la industria han sido las de inducción, también conocidas como motores

LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
10
asíncronos. Estos motores se impusieron por ser más ventajosos desde el punto de vista de prestaciones y de fabricación, además de no requerir un controlador complejo, que los motores síncronos de rotor bobinado, o que los motores de corriente continua, por no ser éstos viables en aplicaciones de media o alta potencia. Adicionalmente, al no utilizar escobillas reduce drásticamente su mantenimiento.
En los últimos tiempos, las nuevas técnicas de fabricación de imanes magnéticos, han permitido el desarrollo y expansión de los conocidos como Motores Síncronos de Imanes Permanentes, PMSM (del acrónimo inglés Permanent
Magnet Synchronous Motor). Estos tipos de motores tienen la peculiaridad de poseer un rotor no bobinado, en el cual el campo magnético es constante y no es necesario utilizar circuitos de excitación para el rotor (escobillas). Esta característica aporta, entre otras ventajas, una muy buena relación potencia/volúmen, mejor eficiencia y mayor fiabilidad, comparándolo con la máquina de inducción.
Sin embargo, este tipo de dispositivos son más complejos a la hora de controlarlos que la máquina de inducción, en parte por que se necesita en todo momento transductores que nos porporcionen la posición del rotor.
2.1.1 LA MÁQUINA DE INDUCCIÓN Y EL MOTOR SÍNCRONO.
El motor de inducción, o Motor Asíncrono con rotor en Jaula de Ardilla, especialmente en su variante trifásica, es el motor eléctrico por excelencia utilizado en la industria. Podemos clasificar a la máquina de inducción dentro del subgrupo de los motores de corriente alterna. Difiere del Motor Síncrono en que el flujo magnético necesario en el rotor para producir el giro, es inducido por las corrientes circulantes en el estator a unas espiras situadas en el rotor, ubicadas en cortocircuito, asemejadas éstas a una “jaula de ardilla”. Por ello, este motor es denominado también Motor de Jaula de Ardilla [2].
Unas de las ventajas respecto al motor síncrono es precisamente el hecho de que las corrientes y el flujo magnético, se autoinducen, y no requieren de ninguna fuente adicional para imantar al rotor. El motor síncrono está compuesto por un estator muy similar al que se encuentra en un motor de inducción, pero el rotor es considerablemente diferente. En un motor síncrono es necesario un bobinado secundario el cual debe ser alimentado externamente, para generar el flujo del rotor. La necesidad de tener que alimentar este bobinado es un inconveniente, pues requiere de elementos denominados anillos rozantes o delgas, estableciendo una conexión eléctrica entre el exterior y el rotor, normalmente ubicado en el interior
CAPÍTULO 2
11
de la máquina, reduciendo la fiabilidad del motor y aumentando el coste y la complejidad de fabricación.
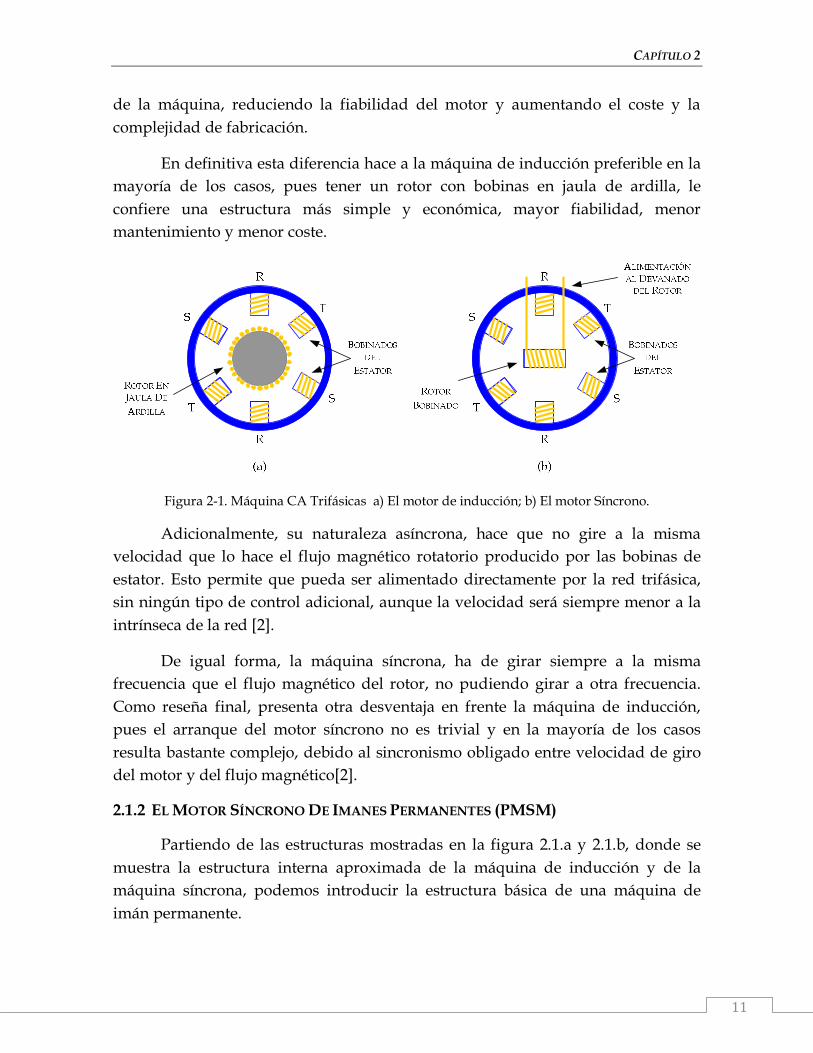
En definitiva esta diferencia hace a la máquina de inducción preferible en la mayoría de los casos, pues tener un rotor con bobinas en jaula de ardilla, le confiere una estructura más simple y económica, mayor fiabilidad, menor mantenimiento y menor coste.
Figura 2-1. Máquina CA Trifásicas a) El motor de inducción; b) El motor Síncrono.
Adicionalmente, su naturaleza asíncrona, hace que no gire a la misma velocidad que lo hace el flujo magnético rotatorio producido por las bobinas de estator. Esto permite que pueda ser alimentado directamente por la red trifásica, sin ningún tipo de control adicional, aunque la velocidad será siempre menor a la intrínseca de la red [2].
De igual forma, la máquina síncrona, ha de girar siempre a la misma frecuencia que el flujo magnético del rotor, no pudiendo girar a otra frecuencia. Como reseña final, presenta otra desventaja en frente la máquina de inducción, pues el arranque del motor síncrono no es trivial y en la mayoría de los casos resulta bastante complejo, debido al sincronismo obligado entre velocidad de giro del motor y del flujo magnético[2].
2.1.2 EL MOTOR SÍNCRONO DE IMANES PERMANENTES (PMSM)
Partiendo de las estructuras mostradas en la figura 2.1.a y 2.1.b, donde se muestra la estructura interna aproximada de la máquina de inducción y de la máquina síncrona, podemos introducir la estructura básica de una máquina de imán permanente.

LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
12
Como es de esperar, el PMSM comparte semejanzas constructivas con los motores mostrados anteriormente. Por un lado, la estructura de estator es muy similar a lo mostrado hasta ahora, albergando los bobinados con la disposición que se observa en la figura 2-1. Por lo que respecta al rotor, es donde este motor se diferencia de sus predecesores. Como su propio nombre indica, el rotor esta formado por un imán permanente, el cual crea el flujo magnético. Así como en la máquina de inducción este flujo se inducía, y en el motor síncrono se debe inducir externamente, en el PMSM el rotor ya esta imantado.
Esto conlleva a que no sea necesario ni la estructura de espiras en corto circuito ni la generación mediante alimentación externa. Sin duda, unos de los motivos principales del crecimiento en el interés en estos motores últimamente, es la obtención de nuevos materiales para la fabricación de imanes, que han mejorado las propiedades de estos dispositivos. A modo de apunte, y sin querer entrar en detalle, los materiales más utilizados a día de hoy para la fabricación de imanes son el Samario-Cobalto (SmCo) y el Neodimio-Hierro-Boro (NdFeB), teniendo el último un mayor magnetismo.
En la figura 2-2 se muestra un diagrama simplificado de la estructura básica de un PMSM, donde se puede observar las bobinas de estator y el imán rotórico.
Figura 2-2. Máquina Síncrona de Imán Permanente
Existen variaciones en la estructura de los imanes que permite hacer una subclasificación, entre motores de imanes interiores y superficiales. Esto se refiere estrictamente a la manera en la cual se ubican los imanes en el rotor. De una u otra ubicación, dependen en consecuencia las expresiones matemáticas que modelan el motor. En la figura 2-3 se muestra de una manera muy intuitiva la diferencia entre el motor de imanes superficiales y el motor de imanes interiores, o insertados en el rotor.

CAPÍTULO 2
13
El hecho de tener esta peculiaridad en la estructura del rotor, le proporciona las ventajas que ya se han comentado, mayor fiabilidad, menor coste, mayor eficiencia, etc. El mayor inconveniente emana de la necesidad de conocer la posición del rotor, en definitiva del flujo magnético constante del imán, para poder hacer girar y controlar al dispositivo, pues es una máquina síncrona. El sensor de posición, encarece y reduce la fiabilidad del equipo.
Figura 2-3. Máquina Síncrona de Imán Permanentes. a) Imán Interior; b) Imán Superficial
Ésta problemática motiva el objeto de este trabajo, el cual es el estudio de diferentes técnicas para la estimación de la posición del rotor sin necesidad de utilizar ningún tipo de sensor, cuando controlamos el sistema bajo técnicas no lineales, como el control deslizante.
2.2 CARACTERIZACIÓN DEL PMSM.
Una vez introducida la tecnología de funcionamiento básica de los motores eléctricos más comunes, se procede a describir de una manera matemática el dispositivo sobre el cual se centra el trabajo, el PMSM.
Las ecuaciones que describen al motor alimentado con un sistema trifásico de tensiones son:
+⋅=
cψ
bψ
aψ
dt
d
ci
bi
ai
sr
cv
bv
av
(2.1)
Donde las tensiones va,vb y vc son la tensiones aplicadas a las bobinas del estor, rs representa la resistencia de dichos bobinados, ia,ib y ic son las corrientes que circulan por ellos, y Ψa, Ψb y Ψc son los flujos producidos por cada bobina. El flujo se puede representar según la expresión 2.2.

LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
14
−
−⋅+⋅=
)3
4cos(
)3
2cos(
)cos(
πθ
πθ
θ
ψ
ψ
ψ
ψ
r
r
r
m
ci
bi
ai
cLcbMcaM
bcMbLbaM
acMabMaL
c
b
a
(2.2)
Siendo:
mLkLcLbLaL +=== (2.3)
;;;;2
acMcaMcbMbcMbaMabMmL
caMbcMabM ===−=== (2.4)
Donde La, Lb y Lc son las inductancias propias de cada bobinado, que es la resultante de la suma de la inductancia de magnetización Lm, y dispersión Lk. Los términos Mxx son las inductancias mutuas entre los tres bobinados de estator, Ψm es el flujo del imán y θr es el ángulo que forma éste con el flujo de la fase a.
Figura 2-4. Representación Fasorial del Sistema con Tensiones abc.
Las ecuaciones obtenidas responden a las de un circuito compuesto por una inductancia, en el cual se han incorporado las tensiones inducidas por las variaciones de flujo, tanto sean estas autoinducidas o inducidas por las otras bobinas, y por el imán permanente. La figura 2-4 representa el diagrama fasorial resultante con un sistema de tensiones trifásico convencional.
Para facilitar el manejo de las ecuaciones mostradas en las expresiones 2.1, 2.2, 2.3 y 2.4, es habitual utilizar dos trasformaciones espaciales, en las cuales se utilizan nuevos sistemas de referencias que simplifican las ecuaciones del motor. La primera de ellas, conocida como transformación de Clarke (figura 2-5), efectúa

CAPÍTULO 2
15
un cambio de ejes de los tradicionales abc a un nuevo sistema, donde los nuevos ejes se denominan αβγ . Si el sistema originario en abc está equilibrado, es decir, la suma de las tres fases en todo momento es nula, la tercera componente del nuevo sistema es también nula, reduciéndose el sistema a un sistema de dos coordenadas. Este plano es conocido como plano alfa-beta.
Del sistema de dos ejes obtenido mediante la transformación de Clarke, se obtiene un sistema de componentes ortogonales, en el que los vectores correspondientes al sistema, como tensiones, flujos o corrientes, giran respecto a los ejes αβ con una velocidad igual a la de giro eléctrico del motor, como se puede ver en la figura 2-5.
Figura 2-5. Sistema de coordenadas abc a Sistema alfa-beta. Transformación de Clarke.
Si conocemos de una manera precisa esta velocidad angular, podemos sincronizar el sistema a esta velocidad, haciendo girar los ejes ortogonales del sistema de referencia αβ de la misma forma que el rotor, resultando un sistema síncrono. A este proceso se le conoce como transformación de Park (Figura 2-6), siendo conocido el plano resultante como dq (del inglés direct and quadrature
components). Se puede interpretar este sistema obtenido, mucho más simple, como un sistema definido por variables continuas en régimen estacionario. En las expresiones 2.5 (transformadas directa e inversa de Clarke) y 2.6 (transformadas directa e inversa de Park) se muestran las matrices de transformación de un sistema a otro, basados en las representaciones mostradas en 2-5 y 2-6. Las ecuaciones resultantes del motor en los planos alfa-beta y dq se muestran en 2.7 (ecuaciones en αβ) y 2.8 (ecuaciones en dq).

LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
16
+
Figura 2-6. Sistema de Tensiones alfa-beta a Sistema dq. Transformación de Park.
⋅−
Τ=⋅Τ=−
−−
⋅=Τ
γ
β
α
αβγαβγ
γ
β
α
αβγ
v
v
v
cv
bv
av
cv
bv
av
v
v
v1
;;
2
1
2
1
2
1
2
3
2
30
2
1
2
11
3
2
(2.5)
⋅
−Τ=⋅Τ=
−=
Q
DDQDQ
Q
DDQ
v
v
v
v
v
v
v
v
rr
rrT
1;;
)cos()sin(
)sin()cos(
β
α
β
α
θθ
θθ
(2.6)
⋅+⋅⋅⋅++⋅=
)sin(
)cos(
2
3
r
r
dt
dm
i
i
dt
dmLkL
i
i
sr
v
v
θ
θψ
β
α
β
α
β
α
(2.7)
⋅⋅+
⋅⋅
⋅−⋅⋅
+⋅=1
0rm
i
i
dt
dLrL
rLdt
dL
i
i
sr
v
v
Q
D
QD
QD
Q
D
Q
Dωψ
ω
ω
(2.8)
Adicionalmente, de la diferencia constructiva mostrada en la figura 2-3, donde se diferencia entre rotores que tienen ubicados los imanes de una manera superficial, denominado SPMSM y rotores donde los imanes están incrustados en el interior del mismo, IPMSM, se deriva una diferencia substancial en el modelo matemático. Si utilizáramos un analizador de impedancias para medir la inductancia resultante de, por ejemplo, una de las fases del motor trifásico, veríamos que en un motor de imanes interiores se producen variaciones considerables de la lectura en función de donde está situado el rotor, debido a que las líneas de flujo magnético producidas por las bobinas encuentran caminos de mayor o menor permeabilidad. Este fenómeno es menos importante en el motor de imanes superficiales, pues los caminos de permeabilidad magnéticas son menos

CAPÍTULO 2
17
variantes con la posición. Aún así, se pueden detectar pequeñas variaciones de inductancia debidas a efectos de saturación en el hierro, por la cercanía del flujo del rotor [8,9,14]. Esta asimetría es conocida normalmente con el término anglosajón saliency. En la figura 2-7 y 2-8 se muestra una representación de este efecto.
Figura 2-7. SPMSM. Variación del Flujo Magnético. Diferentes posiciones del rotor en (a) y (b).
Figura 2-8. IPMSM. Variación del Flujo Magnético. Diferentes posiciones del rotor en (a) y (b).
Se puede demostrar [6] que el modelo matemático resultante teniendo en cuenta saliency es el mostrado en la expresión 2.9 para el plano alfa-beta. Se observa cómo se incluye el ángulo θr en la matriz de inductancias. Para las expresiones del modelo en dq, sigue siendo el mostrado en 2.8. Al ser un sistema síncrono no depende de θr, y únicamente notaremos que las inductancias LD y LQ dejarán de tener el mismo valor.
[ ]
⋅+
⋅+
⋅=
)sin(
)cos(
r
r
mrS
dt
d
i
i
dt
dL
i
ir
v
v
θ
θψ
β
αθ
β
α
β
α (2.9)

LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
18
Siendo :
( )( )
∆+∆
∆∆−=
)2cos(2sin
)2sin(2cos
rr
rr
sLsLsL
sLsLsLL r
θθ
θθθ (2.10)
Donde mLk
LsL2
3+= y mLsL ∆=∆
2
3
El término que indica que existe saliency en el motor es la variación que se produce en la inductancia de magnetización, sL∆ , de modo que si esta variación es
nula, se obtiene la expresión mostrada en 2.7.
Para terminar con la caracterización del PMSM, se introducen las ecuaciones que describen su comportamiento electromecánico. Por un lado, la expresión 2.11 indica la relación entre velocidad angular y par, la expresión 2.12 denota la relación entre la corriente directa Di y en cuadratura Qi , y el par electromecánico.
Lm
m TJJ
BTe
Jdt
d 11−−= ω
ω
(2.11)
[ ]QDQDQm
iiLLip
Te ⋅⋅−−⋅⋅
= )(2
3 ψ
(2.12)
Siendo mω la velocidad angular, eT y LT el par electromecánico y el de
carga, B el coeficiente de fricción, J el momento de inercia, mψ el flujo del imán
permanente y p el número de pares de polos del motor. Por último, las velocidades de rotación mecánica y eléctrica quedan relacionadas por el número de pares de polos según 2.13.
p
rm
ωω = (2.13)
2.3 ESQUEMA DE CONTROL FOC.
Una vez introducido el modelo matemático del motor, se desarrolla a continuación uno de los principales esquemas de control utilizados en el PMSM, el control FOC. Dicho acrónimo proviene de Field Oriented Control, o control vectorial, y utiliza el modelo dq del motor para implementar sendos controles lineales a las corrientes. La figura 2-9 muestra un esquema típico de este tipo de control. Se implementan dos controladores, normalmente tipo PI, para fijar las corrientes del sistema a los valores deseados. La corriente de referencia en d es fijada

CAPÍTULO 2
19
normalmente a un valor nulo, pues al estar alineada con el flujo del imán permanente no es necesaria la creación. No es estrictamente necesario que la corriente en d sea fijada a un valor nulo en el esquema de control, de hecho, existen otros esquemas en que la referencia en d no es nula e incluso variable en función de las condiciones del motor y de las necesidades de par [19,20]. De todas formas, fijar la corriente en d a valor nulo es muy habitual y reduce la complejidad del sistema. En el caso que aquí se presenta, la corriente en d se fija a 0. De la expresión 2.12 se puede deducir que en estas condiciones controlar la corriente en q, es equivalente a controlar el par electromecánico producido.
Figura 2-9. Esquema de Control FOC.
Además se incorpora un control en cascada de la velocidad angular del motor, implementado de nuevo con un controlador tipo PI. Para poder implementar dos controladores en cascada, es necesario que el controlador que se encuentra en el interior del lazo tenga una dinámica mucho más rápida que el controlador que se encuentra a su entrada, de esta manera el primer lazo actuará dando la referencia al lazo interno, teniendo ésta una dinámica lenta, pudiendo el segundo lazo responder suficientemente rápido a las consignas del primero. Podemos denominar a las corrientes, por tanto, como las variables rápidas del sistema, y la velocidad angular como variable lenta. Esto es probado observando

LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
20
las funciones de transferencias resultantes del control, extraídas de las expresiones 2.8 y 2.11.
sD
rQQ
sD
D
DrsL
siL
rsL
svsi
+
⋅⋅+
+=
·
)(
·
)()(
ω (2.14)
( )sQ
mDDr
sQ
Q
QrsL
siL
rsL
svsi
+
+⋅⋅−
+=
·
)(
·
)()(
ψω (2.15)
BsJ
sT
BsJ
sTs
Lem
+−
+=
)()()(ω (2.16)
Utilizando las expresiones deducidas en 2.14, 2.15 y 2.16, se puede construir el sistema equivalente de control que resulta, siendo éste el mostrado en la figura 2-10. Obsérvese que en el sistema se ha considerado que la velocidad angular es una constante, en lugar de asociar la dinámica correspondiente. El sistema es no lineal por este motivo, y además se puede observar como las ecuaciones están acopladas entre sí, precisamente por medio de la velocidad angular del motor.
Se observan que aparecen términos en los lazos de corriente que se pueden considerar perturbaciones proporcionales a la velocidad angular, y un término también en forma de perturbación producido por el par de carga en el control de velocidad. De las cadenas de realimentación mostradas, pueden calcularse los sistemas en s resultantes, en función de la sintonización del PI y fijar las constantes de tiempo asociadas a la corriente en q, que debe ser más rápida que la asociada a ω, 2.17.
ωττ <<i (2.17)
A partir de aquí, el último paso por dar es la inclusión de la etapa de potencia y la implementación del control obtenido. La etapa de potencia normalmente se basa en un VSI (Voltage Source Inverter) [1], aunque también pueden utilizarse convertidores matriciales o multinivel [8,9]. Por lo que respecta al control, se utilizan tanto técnicas basadas en la modulación por anchura de pulsos como basadas en moduladores vectoriales [6].

CAPÍTULO 2
21
Figura 2-10. Esquema Equivalente Control FOC.
2.4 ESQUEMA DE CONTROL DTC.
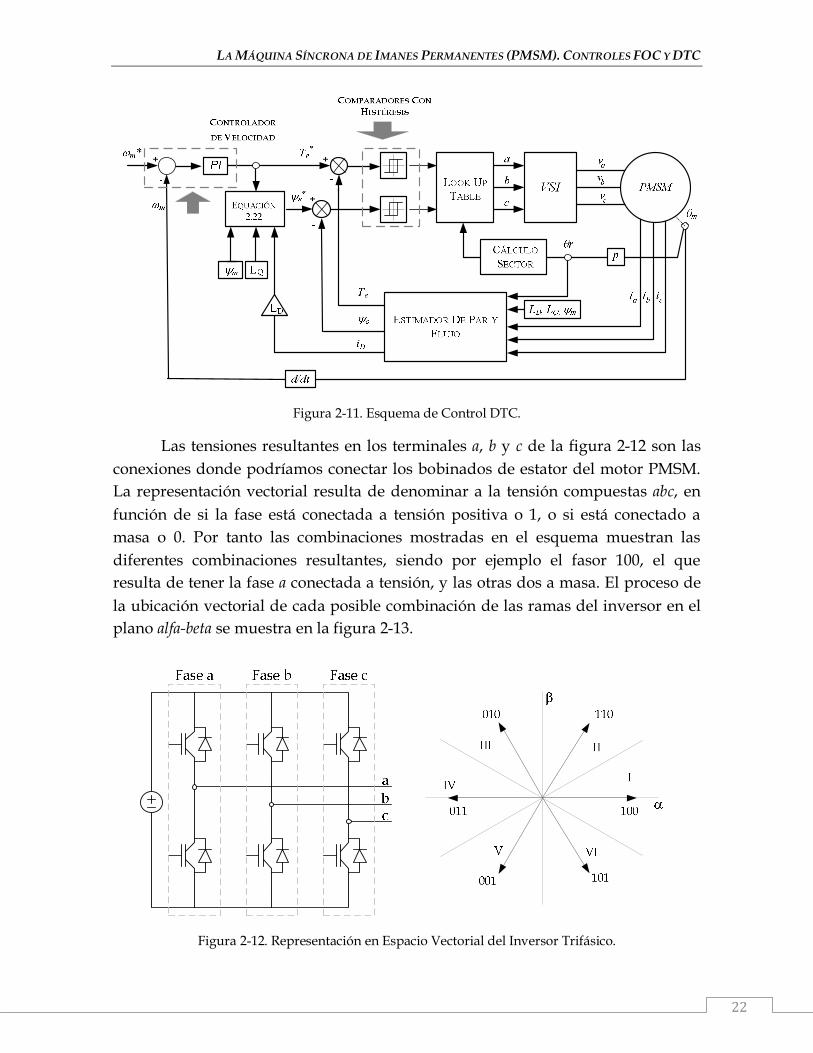
Las primeras aproximaciones al control DTC, o control directo de Par, fueron introducidas a mediados de los años 80, por Depenbrock [11] por un lado, y por Takahashi y Noguchi por otro [25]. La idea fundamental de esta técnica de control es substituir los controladores lineales del esquema FOC, previamente introducido, por comparadores por histéresis, donde en función del estado del signo de los errores del sistema, se aplica una determinada combinación de conmutación al inversor que controla el motor. Para aclarar esta idea, se muestra en la figura 2-11 el esquema básico de control basado en DTC.
El corazón del control es la look up table utilizada. Las señales a,b y c que salen de la tabla de conmutación son directamente las señales de control a aplicar a las ramas del inversor. Como se observa en la figura 2-11, se hace un control directo de par y de flujo, trabajando en el plano alfa-beta. Podríamos clasificar al DTC como un control típicamente no lineal, semejante a un control por histéresis, proporcionando una robustez mayor que el FOC y una dinámica más rápida de par. Para comprender como se fija la tabla de conmutación a utilizar es necesario recurrir al esquema mostrado en 2-12.
LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
22
Figura 2-11. Esquema de Control DTC.
Las tensiones resultantes en los terminales a, b y c de la figura 2-12 son las conexiones donde podríamos conectar los bobinados de estator del motor PMSM. La representación vectorial resulta de denominar a la tensión compuestas abc, en función de si la fase está conectada a tensión positiva o 1, o si está conectado a masa o 0. Por tanto las combinaciones mostradas en el esquema muestran las diferentes combinaciones resultantes, siendo por ejemplo el fasor 100, el que resulta de tener la fase a conectada a tensión, y las otras dos a masa. El proceso de la ubicación vectorial de cada posible combinación de las ramas del inversor en el plano alfa-beta se muestra en la figura 2-13.
Figura 2-12. Representación en Espacio Vectorial del Inversor Trifásico.

CAPÍTULO 2
23
La ubicación de todos los vectores se hace de una forma análoga, obteniéndose el diagrama de la figura 2-12.
Notar que existen dos combinaciones que provocan que la tensión sea nula, y podríamos decir que se encuentra en el origen del diagrama, concretamente la 111 y la 000. Siguiendo con la figura 2-12, en número romanos aparecen delimitados seis sectores distintos, en los cuales puede ubicarse el fasor de tensiones resultante del sistema.
;3
2
⋅Τ⋅=
c
b
a
v
v
αβγβ
α
α
βθ
v
varcnt=
22βα vvabcV +=
θjeabcVabcV ⋅=
abcV
θ
Figura 2-13. Ubicación de los fasores resultantes.
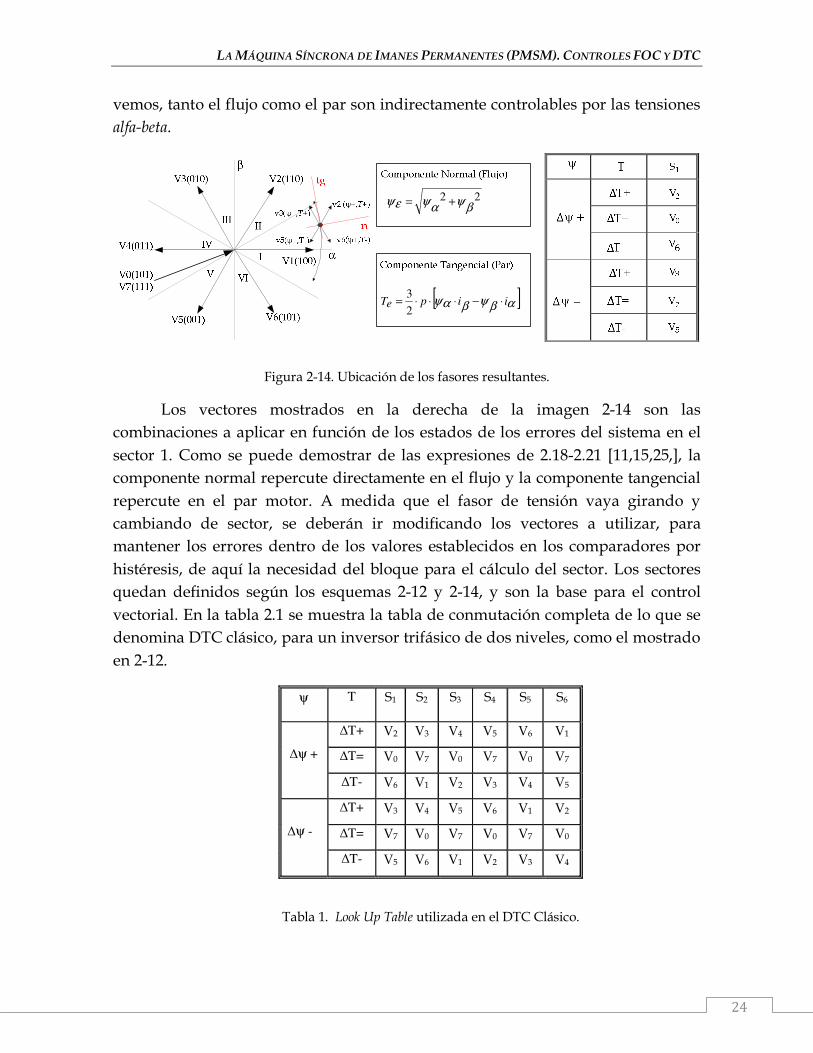
El control identifica en que sector se encuentra el fasor de tensión, y aplica uno u otro vector en función del estado de los errores de par y flujo. Para el cálculo del flujo y par, y de cómo podemos controlar estas dos variables indirectamente modificando el fasor resultante en el plano alfa-beta, se muestran las expresiones 2.18, 2.19, 2.20 y 2.21.
( ) mdtisrv ψαααψ +∫ ⋅⋅−= (2.18)
( )∫ ⋅⋅−= dtisrv βββψ (2.19)
22βψαψεψ += (2.20)
[ ]αβψβαψ iipeT ⋅−⋅⋅⋅=2
3 (2.21)
Las expresiones que se muestran son las que se deben utilizar en el estimador que se muestra en el esquema general mostrado anteriormente. Como
LA MÁQUINA SÍNCRONA DE IMANES PERMANENTES (PMSM). CONTROLES FOC Y DTC
24
vemos, tanto el flujo como el par son indirectamente controlables por las tensiones alfa-beta.
22βψαψεψ +=
[ ]αβψβαψ iipeT ⋅−⋅⋅⋅=2
3
Figura 2-14. Ubicación de los fasores resultantes.
Los vectores mostrados en la derecha de la imagen 2-14 son las combinaciones a aplicar en función de los estados de los errores del sistema en el sector 1. Como se puede demostrar de las expresiones de 2.18-2.21 [11,15,25,], la componente normal repercute directamente en el flujo y la componente tangencial repercute en el par motor. A medida que el fasor de tensión vaya girando y cambiando de sector, se deberán ir modificando los vectores a utilizar, para mantener los errores dentro de los valores establecidos en los comparadores por histéresis, de aquí la necesidad del bloque para el cálculo del sector. Los sectores quedan definidos según los esquemas 2-12 y 2-14, y son la base para el control vectorial. En la tabla 2.1 se muestra la tabla de conmutación completa de lo que se denomina DTC clásico, para un inversor trifásico de dos niveles, como el mostrado en 2-12.
ψ T S1 S2 S3 S4 S5 S6
∆ψ +
∆T+ V2 V3 V4 V5 V6 V1
∆T= V0 V7 V0 V7 V0 V7
∆T- V6 V1 V2 V3 V4 V5
∆ψ -
∆T+ V3 V4 V5 V6 V1 V2
∆T= V7 V0 V7 V0 V7 V0
∆T- V5 V6 V1 V2 V3 V4
Tabla 1. Look Up Table utilizada en el DTC Clásico.

CAPÍTULO 2
25
Puede notarse que en el error de par, se incluye una columna donde se indica un tercer estado de error de par, de esta manera se emplean de manera más eficiente todos los vectores útiles. A partir de aquí es normal utilizar un lazo de control externo, para regular la velocidad, tipo PI. De nuevo surge el aspecto de las velocidades de actuación de los lazos internos, en este caso par motor, respecto al lazo externo de velocidad. Podemos decir que el sistema DTC es un sistema de control en frecuencia variable, e idealmente, el control de par y flujo podrá ser tan rápido como los niveles de histéresis y la discretización del control lo permitan. En otras palabras, si se utilizan comparadores con histéresis con niveles de disparo que tienden a 0, y no limitamos la frecuencia, el controlador DTC podrá responder y seguir cualquier consigna proporcionada por el controlador externo. La sintonización del lazo externo debe basarse en la dinámica del sistema mostrado en la expresión 2.16. La referencia de flujo para el controlador restante, puede ser fijada, como ya se intuía en la figura 2-11, acorde la expresión 2.22.
2
2
3
2)(
⋅⋅
⋅++⋅= QREFmDDREF LT
piL ψψ (2.22)
Este tipo de control, tiene algunas desventajas a reseñar. Por un lado los comparadores por histéresis provocaran rizados en las respuestas de par y flujo. Y por otro, y según la dinámica del sistema, la frecuencia de conmutación podría ser muy baja y a la vez en transitorios muy alta. Existen diversas investigaciones que han estudiado diferentes aspectos para la optimización del funcionamiento, como por ejemplo utilización de diferentes look up tables, utilización de VSI de más de dos niveles, utilización de técnicas de frecuencia fija u optimización de la referencia de flujo [6,8,9].
27
CAPÍTULO 3.
APLICACIÓN DEL CONTROL
DESLIZANTE SOBRE EL PMSM.
3.1 INTRODUCCIÓN AL CONTROL DESLIZANTE.
Las técnicas de control que se utilizan en la mayoría de sistemas en ingeniería son lineales, definidas de esta manera debido a que utilizan modelos lineales de las plantas a controlar. En concreto, los sistemas se estudian desde la óptica en los cuales son lineales e invariantes en el tiempo (denominados LTI). Mediante la transformada de Laplace [3] se construyen funciones de transferencia que sirven para analizar la estabilidad del sistema, la respuesta dinámica, la característica de la respuesta, etc. Si nos centramos en el aspecto de la estabilidad, dado un sistema lineal como el mostrado en 3.1, el cual es representado en el espacio de estado, la estabilidad del sistema vendrá dada por la solución a la ecuación diferencial, mostrada en 3.3, donde las exponenciales de signo positivo indicarán un comportamiento no acotado de la respuesta y una exponencial negativa hará que la respuesta tienda a estabilizarse con el tiempo, es decir a ser estable [3].
u(t)Bx(t)Adt
dx(t)⋅+⋅= (3.1)
As
B
su
sxsuBsxAsxs
−=→⋅+⋅=⋅
)(
)()()()( (3.2)
)()( tutAeBtx ⋅⋅⋅= (3.3)
Aún así, algunos sistemas de ecuaciones que describen determinadas plantas pueden presentar una característica no lineal. Esto es, pueden ser sistemas con variables discontinuas en el tiempo, o lineales sólo a tramos, sistemas en las que aparecen productos de las variables de estado, etc. Cuando se estudian este

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
28
tipo de sistemas, es habitual aproximarlos a sistemas lineales, y poder aplicarles técnicas lineales. La linealización generalmente consiste en una expansión en series de Taylor de la ecuación de estado no-lineal alrededor de un punto de operación concreto, que en muchas ocasiones es el resultante de hacer las derivadas de estado del sistema nulas en el punto de equilibrio. Si tenemos una ecuación de estado de una variable x(t) dada y una variable de entrada al sistema u(t), el cual sea no lineal, representado por 3.4:
( ))(),()(
tutxfdt
tdx= (3.4)
Se puede aproximar el sistema no lineal a un sistema lineal aplicando la serie de Taylor alrededor de un punto de equilibrio, y truncando después de los términos de primer orden (3.5). La expresión 3.5 puede ser reordenada a una expresión del tipo 3.1.
( ) ( ) ( ) ( ) ( )000000 uuu
f,uxfxx
x
f,uxfx(t),u(t)f
0000 ,ux,ux
−⋅∂
∂++−⋅
∂
∂+≈ (3.5)
Donde el punto de equilibrio debe satisfacer:
( ) 0, =00 uxf (3.6)
Paralelamente a esto, es posible tratar a los sistemas no lineales sin la necesidad de la linealización, para estudiar su respuesta transitoria, su estabilidad, etc. Gran parte del estudio de los sistemas no lineales se basa en una idea introducida por el físico y matemático ruso Aleksandr Mijáilovich Lyapunov (1857-1918). En concreto Lyapunov se baso en el carácter energético de los sistemas para formular la siguiente idea:
“Si la energía total es disipada, el sistema debe ser estable”
En definitiva si podemos relacionar a un sistema con una función energética, no será necesario la resolución de las ecuaciones diferenciales del tipo mostrado en 3.1 o 3.5, y podremos estudiar la estabilidad del sistema desde el punto de vista de las variables energéticas propias. Se define a continuación la estabilidad de una manera más rigurosa.

CAPÍTULO 3
29
Sea 0x = un punto de equilibrio de )()( xftx =& , se puede considerar localmente estable si para cualquier R > 0 existe r > 0 tal que:
0tR,xrx (0)(0) ≥<⇒<
Se puede considerar localmente asintóticamente estable si además:
0)(lim =⇒<∞→
txrxt
(0)
Y globalmente asintóticamente estable si se cumple que es localmente asintóticamente estable para todas n
Rx(0) ∈ . Considerando de nuevo que )(xfx =& , 0f(0) = y que nRΩ0 ⊂∈ , según los criterios de estabilidad formulados por Lyapunov, podremos decir que 0x = es locamente estable si existe una función RV →Ω: tal que:
(1) 0V(0) = (2) 0V(x) > para todo Ω∈x con 0≠x
(3) 0V(x) ≤& para todas las trayectorias del sistema en Ω
Además 0x = será localmente asintóticamente estable si
(4) 0)( <xV& Ω∈x con 0≠x
La función V es conocida como función energética o función de Lyapunov. Si es posible escribir una función energética asociada a las variables energéticas de un sistema y ésta cumple con las condiciones (1)-(3), será localmente estable. De hecho la premisa número 3 es directamente la idea expresada por Lyapunov, pues define que la función V debe decrecer en todo momento. Notar que estas premisas de estabilidad pueden ser aplicadas a cualquier tipo de sistema definido en el espacio de estado, ya presente una estructura lineal o no lineal. Cómo formular una función que sea candidata a ser función de Lyapunov es un aspecto importante, pues será la vía por la cual podremos demostrar la convergencia o estabilidad de un sistema. Por lo que respecta a la aplicación de estas técnicas a la ingeniería eléctrica, las variables energéticas a elegir serán normalmente corrientes a través de inductancias y tensiones en condensadores.
El control en modo deslizamiento, en inglés Sliding mode Control , se basa en la idea principal de la función energética de Lyapunov para controlar el sistema en cuestión. El control deslizante impone una dinámica a los errores del sistema, de

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
30
manera que fuerza que siempre tiendan a disminuirse. Cuando decimos errores del sistema, nos referimos a la diferencia entre los valores deseados y los reales de la planta a controlar. Es muy común definir el vector de errores del sistema, definidos como el error y un número determinado de sus derivadas, como se muestra en 3.7. El control deslizante impone la dinámica de los errores mediante un vector de ganancias asociado a éste, 3.8.
( ) ( )
−−=
−
−
1
*1*
.....N
N
x
dt
xxdxxe (3.7)
[ ]11..... −= NggG (3.8)
El vector de ganancias define un valor para cada término del vector de errores del sistema, de manera que resulta la siguiente expresión diferencial, la cual garantizará que el vector de errores se haga nulo, para ∞→t , sí el vector G se diseña correctamente.
( ) ( ) *
1
*1
1
*
1 0...)( xxdt
xxdgxxgeGx
N
N
Nx →⇒=
−⋅++−⋅=⋅=
−
−
−σ (3.9)
El producto de los vectores de errores del sistema y del vector de ganancia es normalmente conocido como superficie de deslizamiento, en inglés sliding surface, que es donde se genera la discontinuidad necesaria para el diseño del vector de ganancia; esto es que la variable a controlar se encuentre por debajo o por encima del valor deseado. Si escogemos el vector asociado al error simple de la variable x y de su valor deseado en 3.10.
( )*xxex −= (3.10)
Con una superficie de deslizamiento dada, la variable de control del sistema )(tu , deberá actuar en función del estado del error, por tal que las trayectorias se
dirijan siempre hacia la superficie. Es decir, deberá ir conmutando alrededor de la superficie de deslizamiento, figura 3-1.
Figura 3-1. Comportamiento del Control alrededor de la superficie de conmutación.

CAPÍTULO 3
31
El control tomará dos valores únicos, definidos en 3.11.
000
,uuu −∈ (3.11)
La expresión a partir de la cual se podrá diseñar la ley de control vendrá dada por 3.12, donde se fuerza a que todas las trayectorias se dirijan a la superficie.
0dt
xdx <⋅
)()(
σσ (3.12)
Podemos representar mediante la figura 3-2 la dinámica deseada del error impuesta por el control deslizante, esto es, que sean siempre forzadas hacía el error cero.
0)( =xσ
0)(
;0)( 0 <∋=>dt
xduuxsi
σσ
0),(
;0)( 0 >∋−=<dt
txduuxsi
σσ
Figura 3-2. Superficie de Deslizamiento y Trayectorias del Sistema
La expresión 3.12 no es más que lo que resultaría de construir una función de Lyapunov basada en la superficie de deslizamiento como en 3.13, y satisfacer la condición de estabilidad tercera, esto es 3.14.
2)(
2
1xV σ= (3.13)
0dt
xdxV <⋅=
)()(
σσ& (3.14)
Para la inclusión de la ecuación de espacio de estado en la expresión matemática que permitirá el control, esto es 3.14 o 3.12, es común expresar el sistema en términos de error, utilizando 3.10 en la expresión 3.1.
( ) ( ) ( )***ueBxeAxe
dt
duXX +⋅++⋅=+ (3.15)

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
32
Nota: La estructura del sistema mostrada en 3.15 responde a un sistema lineal. Aún así el
principio de convergencia de sistemas definido por Lyapunov puede ser aplicado a cualquier sistema.
Se define la variable de control u en términos de un valor constante, y un error. El valor referencia es el valor de la variable de control que se aplica en un momento dado para satisfacer 3.16, el cual coincide con el concepto del control equivalente.
**x
B
Au ⋅−= (3.16)
Se puede simplificar 3.15 con 3.16.
uBxAdt
dex
B
AuBeA
dt
de XX
X⋅+⋅=→⋅+⋅+⋅= )(
* (3.17)
Una vez expresado el sistema en términos de error, el control se debe diseñar utilizando la expresión 3.12, que se re-escribe de manera que la ecuación de error del sistema aflore.
0dt
deGx
dt
de
ex
dt
xdx xx
x
<⋅⋅=⋅∂
∂⋅=⋅ )()(
)()( σ
σσ
σσ (3.18)
La ecuación 3.19 define la expresión matemática a utilizar.
[ ] 0uBxAGx <⋅+⋅⋅⋅)(σ (3.19)
Como se expresó en 3.16, se puede redefinir de nuevo el concepto de control equivalente. Anteriormente se refirió al valor que resulta de poner las derivadas a 0. De igual forma podemos decir que el control equivalente es el que resulta cuando el sistema alcance el régimen deslizante, esto es
[ ] 0=⋅+⋅⋅ equBxAG (3.20)
Por último, el término del control equivalente será el que permita definir los valores discretos del control a aplicar, en función de en qué lugar se encuentre el error.
( )[ ] 0)( <−+⋅+⋅⋅⋅ eqeq uuuBxAGxσ (3.21)
Si se combina 3.29 y 3.21, se llega a la expresión que permite otorgar los valores al control que harán que las trayectorias del sistema sean dirigidas siempre

CAPÍTULO 3
33
hacia la superficie de conmutación. En 3.22 se llega a dicha expresión y en las ecuaciones que le siguen el control a aplicar.
( ) 0)( <−⋅⋅⋅ equuBGxσ (3.22)
Si 0)( >xσ y 0>⋅ BG entonces ( ) 0<− equu por tanto 0uu −= y 0<⋅ BG entonces ( ) 0>− equu por tanto 0uu =
Si 0)( <xσ y 0>⋅ BG entonces ( ) 0>− equu por tanto 0uu = y 0<⋅ BG entonces ( ) 0<− equu por tanto 0uu −=
Por último es importante estudiar en qué condiciones el control deslizante se puede garantizar, es decir, no estando el sistema sobre la superficie de deslizamiento, sea siempre dirigido hacía ella. Se define como régimen deslizante, y se cumple si el control equivalente está siempre comprendido entre el conjunto de valores de control definidos por 3.23.
00 uuu eq <<− (3.23)
3.2 CONTROL DESLIZANTE POR CORRIENTES DQ. CONTROL INDIRECTO DE PAR.
Se puede aplicar el control deslizante, tal y como se ha expuesto en el punto anterior, al motor PMSM, utilizando las expresiones dadas en el capítulo 2.8, y expresándolas en términos de espacio de estado de las corrientes en dq.
QQrDSDD
D iLωirvdt
diL ⋅⋅+⋅−=⋅ (3.24)
mrDDrQSQ
Q
Q ψωiLωirvdt
diL ⋅−⋅⋅−⋅−= (3.25)
p
ωω;T
J
1ω
J
BTe
J
1
dt
dωr
mLm
m =−−=
(3.26)
[ ]QDQDQm
ii)L(Li2
ψp3Te ⋅⋅−−
⋅⋅=
(3.27)
Las ecuaciones en el espacio de estado no son lineales, pues tienen productos de variables de estado.

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
34
La implementación del control del PMSM, controlando las corrientes en dq, se efectúa sobre las variables de control, que en este caso son las tensiones en dq. Se define una superficie de conmutación (S) para las variables a controlar:
D*
DD iiS −= (3.28)
Q*
QQ iiS −= (3.29)
Llegamos a las expresiones del sistema en términos de error como se introdujo en 3.15, 3.16 y 3.17.
QQrDSDi
D iLirvdt
deL
D ⋅⋅+⋅−=⋅ ω (3.30)
mrDDrQSQ
i
Q iLirvdt
deL
Q ψωω ⋅−⋅⋅−⋅−=⋅ (3.31)
El control queda definido por dos valores discretos, dependiendo del signo de S, como se muestra en 3.11. Los valores discretos de las tensiones dq se definen:
00 , DDD vvv −∈ (3.32)
00 , QQQ vvv −∈ (3.33)
Siguiendo lo expuesto en 3.12, las condiciones a cumplir para garantizar convergencia hacía la superficie serán:
( ) 0;0 <⋅⋅+⋅−⋅<⋅ QQrDSDDDD iLirvSSS ω& (3.34)
( ) 0;0 <⋅−⋅⋅−⋅−⋅<⋅ mrDDrQSQQQQ iLirvSSS ψωω& (3.35)
Aplicando la derivada de las expresiones 3.34 y 3.35, introduciendo las expresiones del espacio de errores en ellas y utilizando concepto de control equivalente, se alcanzan las expresiones 3.36 y 3.37.
QQrDSDeqDeqDD iLirvvvS ⋅⋅−⋅=<−⋅ ω;0][ (3.36)
[ ] mrDDrQSQeqQeqQQ iLirvvvS ψωω ⋅+⋅⋅+⋅=<−⋅ ;0 (3.37)
Que implica:
)(0 DDD Ssignvv ⋅−= (3.38)
)(0 QQQ Ssignvv ⋅−= (3.39)

CAPÍTULO 3
35
Por último, para garantizar el régimen deslizante las variables de control en tensiones deberán satisfacer 3.40 y 3.41.
00 DDeqDvvv <<− (3.40)
00 QQeqQvvv <<− (3.41)
Aplicando el control deslizante mostrado anteriormente, se pueden fijar las corrientes al motor y controlarlo de la manera deseada. Como el PMSM ya posee flujo en el rotor, como se introdujo en el capítulo 2, es muy habitual fijar la corriente en d a un valor nulo, de manera que no se crea flujo adicional.
abc
dq+
-
+
-
abc
dq
i
i
p
iD
iD*
iQ*
vD
vQ v
v
r
CONTROLADORESDE SIGNO
iQ
KT
Te*
m
va
vb
vc
PMSM
ia
ib
ic
Figura 3-3. Diagrama de Bloques del Control en Corrientes del PMSM en modo Deslizante.
A partir de aquí, la corriente en q está altamente ligada al par motor aplicado a la máquina, como se mostraba en la ecuación 2.12.
[ ]QDQDQm
iiLLip
Te ⋅⋅−−⋅⋅
= )(2
3 ψ
(3.42)
Observando la expresión 3.42, se puede considerar que la relación entre par y corriente en q es lineal, pues las inductancias LD y LQ son normalmente de valor muy similar. Podemos expresar por tanto
QT iKTe ⋅= (3.43)

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
36
Siendo 2
3 mT
pK
ψ⋅⋅=
Controlando la corriente en q se puede realizar un control indirecto de par motor, utilizando la expresión 3.43. El diagrama de bloques mostrado en 3-3 muestra este sistema de control que es similar al sistema DTC mostrado en el capítulo 2.

CAPÍTULO 3
37
SIMULACIÓN CASO 6.
CONTROL INDIRECTO DE PAR
Las figuras de simulación de 3.1 a 3.4 muestran la respuesta del sistema mostrado en la figura 3.3, para el caso de simulación 6. Por un lado, se observan las dinámicas nulas de las corrientes en dq, debido a las características de las superficies utilizadas. Además se muestra la respuesta de los controles equivalentes en las tensiones dq. En la simulación 3.3 se observa el transitorio de par de consigna, mostrando la rápida respuesta del sistema. Por último se observa la velocidad en 3.4, que es una consecuencia de las consignas de par.
Simulación 3.1. Respuesta de las Corrientes en d (azul) y q (verde)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-300
-200
-100
0
100
200
300
Ten
sión
(V)
Simulación 3.2. Valores de Tensión Filtrados Paso-Bajo en d (azul) y q (verde)

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
38
Simulación 3.3. Detalle de la Respuesta de Par (azul) Respecto a un cambio de Consigna (verde)
Veloc
idad
Ang
ular
(ra
d/s)
Simulación 3.4. Respuesta de Velocidad Angular

CAPÍTULO 3
39
3.3 CONTROL DESLIZANTE POR CORRIENTES DQ. CONTROL DE
VELOCIDAD
Partiendo de lo expuesto anteriormente, se puede añadir un control externo para regular la velocidad del motor, como es normalmente utilizado en los controles tipo FOC. Desde el punto de vista de control, los controles que implican altas ganancias, como es el caso del control deslizante, no son viables en su aplicación. La problemática de utilizar sendos controles deslizantes en cascada es estructural, debido a la naturaleza del control [5].
En general, en los controladores en cascada, el lazo exterior proporciona la referencia para el lazo interno, el cual debe ser capaz de seguir la referencia recibida. En el caso de los controladores en modo deslizamiento, donde se generan discontinuidades alrededor de las superficies de conmutación, se producen variaciones muy rápidas en las señales de control, en concreto de uno a otro valor discreto del control. Siendo ésta la referencia del lazo externo del control, ningún tipo de control será capaz de seguir una referencia con estas discontinuidades. Es posible utilizar un control en cascada para controlar la velocidad del motor, utilizando un control lineal, dando la referencia al control deslizante de corriente en q. El control deslizante controla las expresiones 3.44 y 3.45, el controlador lineal controla 3.46 y 3.47 resulta la salida del sistema.
QQrDSD
D
D iLirvdt
diL ⋅⋅+⋅−=⋅ ω (3.44)
mrDDrQSQQ
Q iLirvdt
diL ψωω ⋅−⋅⋅−⋅−= (3.45)
p
ωω;T
J
1ω
J
BTe
J
1
dt
dωr
mLm
m =−−=
(3.46)
[ ]QDQDQm
ii)L(Li2
ψp3Te ⋅⋅−−
⋅⋅=
(3.47)
Así como en el controlador tipo FOC se precisaba el diseño de los lazos de
control de modo que la constante de tiempo resultante en el lazo interno fuera mucho menor a la del lazo interno, en el caso de control lineal seguido de control deslizante, se deberá asegurar que el régimen deslizante se alcanza rápidamente. Si el régimen se alcanza de manera rápida, el orden del sistema se reduce al propio del sistema determinado por el controlador lineal y la propia función de

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
40
transferencia de la planta. La figura 3-4 muestra el diagrama de bloques de esta ampliación de control mostrado en apartado 3.2.
Figura 3-4. Diagrama de Bloques del Control en Corrientes del PMSM en modo Deslizante con Control Lineal PI.
Con este esquema se mejora la respuesta dinámica, pues se pueden diseñar controladores lineales más rápidos, sin tener la restricción de la relación entre las constantes de tiempo del lazo interior. En la figura 3-5 se muestra el sistema equivalente de control que sintetiza dicho sistema con control de velocidad. De igual forma, es el mismo diagrama que el correspondiente al punto anterior, eliminando el controlador lineal y dando la consigna de par/corriente deseado.
Figura 3-5. Diagrama de Bloques Equivalente del Control Deslizante + PI.
Del diagrama de control se debe hacer énfasis en que las superficies de deslizamiento en corriente no tienen dinámica asociada, una vez se alcanza el régimen deslizante, cosa que ocurrirá de una manera muy rápida. Esto es una

CAPÍTULO 3
41
ventaja respecto al control en cascada con varios PI, cuyas constantes de tiempo serán generalmente mayores a los transitorios de dinámica libre del control deslizante. La dinámica libre corresponde a los instantes en que el sistema no se está deslizando, y por tanto el control aplicará la máxima ganancia para dirigirlo hacía la superfície, siendo normalmente estos transitorios no deslizantes muy rápidos. Una vez ocurrido, el valor de referencia y el del sistema son iguales, sin ninguna dinámica asociada, reduciendo el orden del sistema. Por lo contrario, en un control en cascada de dos controles lineales tipo PI o similares, el orden del sistema será mayor, aún haya sido diseñado de manera que uno sea mucho más rápido que el interior, ambos aportarán dinámica al sistema.

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
42
SIMULACIÓN CASO 1.
INVERSIÓN DE GIRO A VELOCIDAD Y PAR NOMINAL
Las simulaciones 3.5, 3.6 y 3.7 responden al sistema mostrado en la figura 3-4, para el caso de simulación 1. Se muestran las corrientes y tensiones en dq así como la respuesta del lazo de control lineal de velocidad.
Simulación 3.5. Respuesta de las Corrientes en d (azul) y q (verde)
Ten
sión
(V)
Simulación 3.6. Valores de Tensión Filtrados Paso-Bajo en d (azul) y q (verde)

CAPÍTULO 3
43
Veloc
idad
Ang
ular
(rad
/s)
Simulación 3.7. Respuesta de Velocidad Angular (verde) respecto la Consigna (azul)
SIMULACIÓN CASO 2.
ARRANQUE A VELOCIDAD NOMINAL CON VARIACIÓN DE PAR
En las simulaciones 3.8, 3.9 y 3.10 se muestran cómo reacciona el sistema en una variación de par brusca, definida en el caso de simulación 2.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
Tiempo (s)
Simulación 3.8. Respuesta de las Corrientes en d (azul) y q (verde)
Ten
sión
(V)
Simulación 3.9. Valores de Tensión Filtrados Paso-Bajo en d (azul) y q (verde)

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
44
Las tensiones y corrientes en el sistema de referencia dq se muestran en 3.8 y 3.9, siendo 3.10 el comportamiento de la velocidad bajo control lineal.
Veloc
idad
Ang
ular
(ra
d/s)
Simulación 3.10. Respuesta de Velocidad Angular (verde) respecto la Consigna (azul)

CAPÍTULO 3
45
3.4 CONTROL INTEGRAL DESLIZANTE DE VELOCIDAD.
Alternativamente a utilizar un control en cascada de un controlador lineal en serie con el controlador en modo deslizante en corriente en q, es posible diseñar una superficie de conmutación para controlar directamente el error en velocidad angular [5]. Las ecuaciones que definen el modelo del motor en dq son de nuevo:
QQrDSD
D
D iLirvdt
diL ⋅⋅+⋅−=⋅ ω (3.48)
mrDDrQSQQ
Q iLirvdt
diL ψωω ⋅−⋅⋅−⋅−= (3.49)
p
ωω;T
J
1ω
J
BTe
J
1
dt
dωr
mLm
m =−−=
(3.50)
[ ]QDQDQm
iiLLip
Te ⋅⋅−−⋅⋅
= )(2
3 ψ
(3.51)
En este caso, escogemos las ecuaciones 3.48 y 3.50 para realizar el control. En la ecuación 3.48 se controla la corriente en d como ya se hizo en el apartado 3.2. En la ecuación 3.50, aparece la velocidad mecánica con su derivada, y es a partir de esta ecuación de estado de donde se construye la otra superficie de deslizamiento.
Las superficies de conmutación o deslizamiento pueden definirse como los errores de velocidad angular y corriente en d.
mmS ωωω −=* (3.52)
DDD iiS −=* (3.53)
El control de la superficie de velocidad se diseñará a partir de la expresión 3.54.
( ) 0;0
*
*<
−⋅−<⋅
dt
d
dt
dSS mm
mm
ωωωωωω
& (3.54)
Se puede incluir la ecuación de estado 3.50 en la expresión 3.54.
( ) 011
**
<
−−−⋅− Lm
mmm T
JJ
BTe
Jdt
dω
ωωω (3.55)

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
46
Se puede ver que la expresión resultante, no será controlable mediante la tensión en q, debido a que no aparece en la expresión 3.55. Para hacer aflorar el control, en lugar de utilizar la superficie de deslizamiento basada en el error de 3.52, se utiliza 3.56
dt
deeCS
ωωω +⋅= ; Donde mme ωωω −=
* (3.56)
Al introducir la derivada del error en el sistema, aparecerá la señal de control mediante la inclusión de 3.49. Se calcula el control equivalente del sistema, el cual será necesario posteriormente para simplificar la expresión de diseño del control. El control equivalente se define como el valor de tensión en q que hace la derivada de la expresión 3.56 nula.
0
2
=+⋅=dt
ed
dt
deCS
ωωω& (3.57)
0
2*2*
=−+−⋅=dt
d
dt
d
dt
dC
dt
dCS
mmmm ωωωωω& (3.58)
Se supone que el valor de referencia será constante. Además podemos utilizar la expresiones 3.49 y 3.50, e introducirlas en el cálculo del control equivalente.
0
*2*
=
−⋅−+−⋅=
dt
d
J
B
dt
di
J
K
dt
d
dt
dC
dt
dCS
mQTmmm ωωωωω& (3.59)
( )( ) 0
*2*
=
+⋅⋅−⋅−
⋅−+
−+⋅ mDDmQSQ
Q
TmmmiLpirv
LJ
K
dt
d
dt
dC
J
B
dt
dC ψω
ωωω (3.60)
Donde se ha aproximado el par electromecánico por la expresión 3.43. Resolviendo la expresión 3.60 se llega al valor de tensión en q que satisface 3.57.
( )mDDmQSmmm
Qeq iLpirdt
d
kdt
dC
J
B
kdt
d
k
Cv ψω
ωωω+⋅⋅+⋅+⋅+
−⋅+⋅=
*2*11
(3.61)
Siendo Q
T
LJ
Kk
⋅=

CAPÍTULO 3
47
Para garantizar que las trayectorias del sistema siempre se dirijan hacia la superficie de deslizamiento, se debe cumplir que:
0<⋅ ωω SS & (3.62)
Derivando e introduciendo las ecuaciones de estado que aparece se llega a 3.63.
0
*2*
<
−⋅−+⋅−⋅=
dt
d
J
B
dt
di
J
K
dt
d
dt
dC
dt
dCS mQTmmm ωωωω
ω& (3.63)
( )( ) 0
*2*
<
−+⋅−⋅−⋅−+
−⋅
dt
d
J
BiLpirvk
dt
d
dt
d
dt
dC
mmDDrQSQ
mmm ωψω
ωωω (3.64)
Ahora si aparece la tensión en q en la expresión base para diseñar el control. Combinando la expresión 3.64 con la del control equivalente resultante de 3.61 se llega a 3.65.
( )( ) 0<−⋅⋅ QQeq vvkSω (3.65)
Se puede asumir que el término k es siempre positivo y diferente de 0. Por lo que los valores a aplicar a la tensión en q para controlar la velocidad son:
)(0 QQQ Ssignvv ⋅= (3.66)
El régimen deslizante queda definido por la expresión 3.61 particularizada para el caso concreto en el cual 0=ωS , lo cual ha sido fijado en la expresión 3.65.
La particularización deriva en 3.67.
0
2
=+⋅=dt
ed
dt
deCS ωω
ω& y
dt
deeC ω
ω −=⋅ (3.67)
0
*2*22 =
−⋅−+⋅−⋅=
dt
d
J
B
dt
di
J
K
dt
dCCS mQTm
mm
ωωωωω
& (3.68)
Por tanto el control equivalente concreto para mantener 0=ωS se define en 3.69.
( ) ( )mDDmQSmm
mmQeq iLpirdt
d
Jk
B
dt
d
kk
Cv ψω
ωωωω +⋅+⋅+
⋅+⋅+−⋅=
*2*
21
(3.69)
Los valores de tensión en q deberán poder satisfacer en todo momento la expresión 3.69, o lo que es lo mismo, que se cumpla 3.70.
APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
48
( ) ( )0
*2*
2
0
1QmDDmQS
mm
mmQ viLpirdt
d
Jk
B
dt
d
kk
Cv <+⋅+⋅+
⋅+⋅+−⋅<− ψω
ωωωω (3.70)
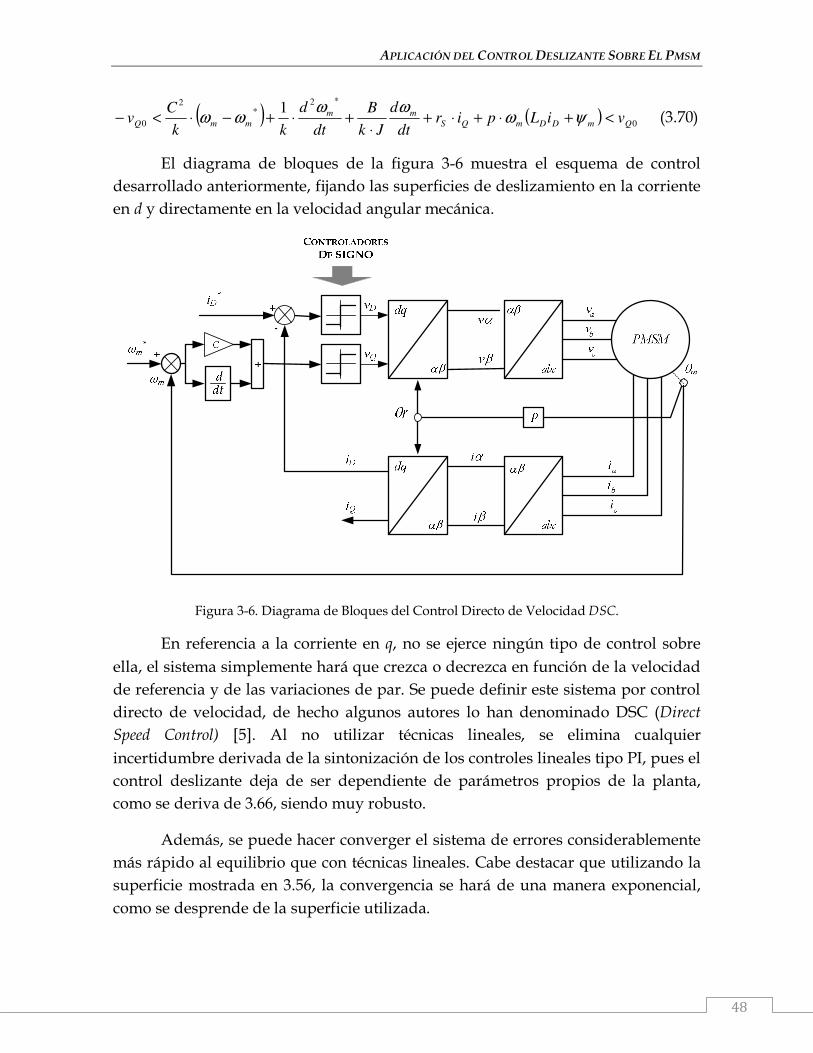
El diagrama de bloques de la figura 3-6 muestra el esquema de control desarrollado anteriormente, fijando las superficies de deslizamiento en la corriente en d y directamente en la velocidad angular mecánica.
Figura 3-6. Diagrama de Bloques del Control Directo de Velocidad DSC.
En referencia a la corriente en q, no se ejerce ningún tipo de control sobre ella, el sistema simplemente hará que crezca o decrezca en función de la velocidad de referencia y de las variaciones de par. Se puede definir este sistema por control directo de velocidad, de hecho algunos autores lo han denominado DSC (Direct
Speed Control) [5]. Al no utilizar técnicas lineales, se elimina cualquier incertidumbre derivada de la sintonización de los controles lineales tipo PI, pues el control deslizante deja de ser dependiente de parámetros propios de la planta, como se deriva de 3.66, siendo muy robusto.
Además, se puede hacer converger el sistema de errores considerablemente más rápido al equilibrio que con técnicas lineales. Cabe destacar que utilizando la superficie mostrada en 3.56, la convergencia se hará de una manera exponencial, como se desprende de la superficie utilizada.

CAPÍTULO 3
49
dt
deeCS
ωωω ⋅+⋅= mme ωωω −=
* (3.71)
Si 0=ωS , la velocidad real convergerá de una manera exponencial al valor
de referencia con la dinámica mostrada en 3.72, que se esquematiza en 3-7, resolviendo la ecuación diferencial 3.71 mediante Laplace.
tCmm e ⋅−⋅=
*ωω (3.72)
Cs +
1
Figura 3-7. Dinámica de Velocidad del Control DSC.
Por tanto, la expresión 3.72 puede ser incluida en el control equivalente definido en 3.69, siendo todavía más precisa su definición.

APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
50
SIMULACIÓN CASO 1.
INVERSIÓN DE GIRO A VELOCIDAD Y PAR NOMINAL
En las simulaciones 3.11, 3.12 y 3.13 se verifica el correcto funcionamiento del sistema mostrado en la 3-6 en el caso de simulación 1. Se puede observar la dinámica de primer orden relacionada con la superficie de deslizamiento utilizada para controlar la velocidad del motor.
Simulación 3.11. Respuesta de las Corrientes en d (azul) y q (verde)
Ten
sión
(V)
Simulación 3.12. Valores de Tensión Filtrados Paso-Bajo en d (azul) y q (verde)

CAPÍTULO 3
51
Simulación 3.13. Respuesta de Velocidad Angular (verde) respecto la Consigna (azul)
SIMULACIÓN CASO 2.
ARRANQUE A VELOCIDAD NOMINAL CON VARIACIÓN DE PAR
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
Tiempo(s)
Simulación 3.14. Respuesta de las Corrientes en d (azul) y q (verde)
Ten
sión
(V)
Simulación 3.15. Valores de Tensión Filtrados Paso-Bajo en d (azul) y q (verde)
APLICACIÓN DEL CONTROL DESLIZANTE SOBRE EL PMSM
52
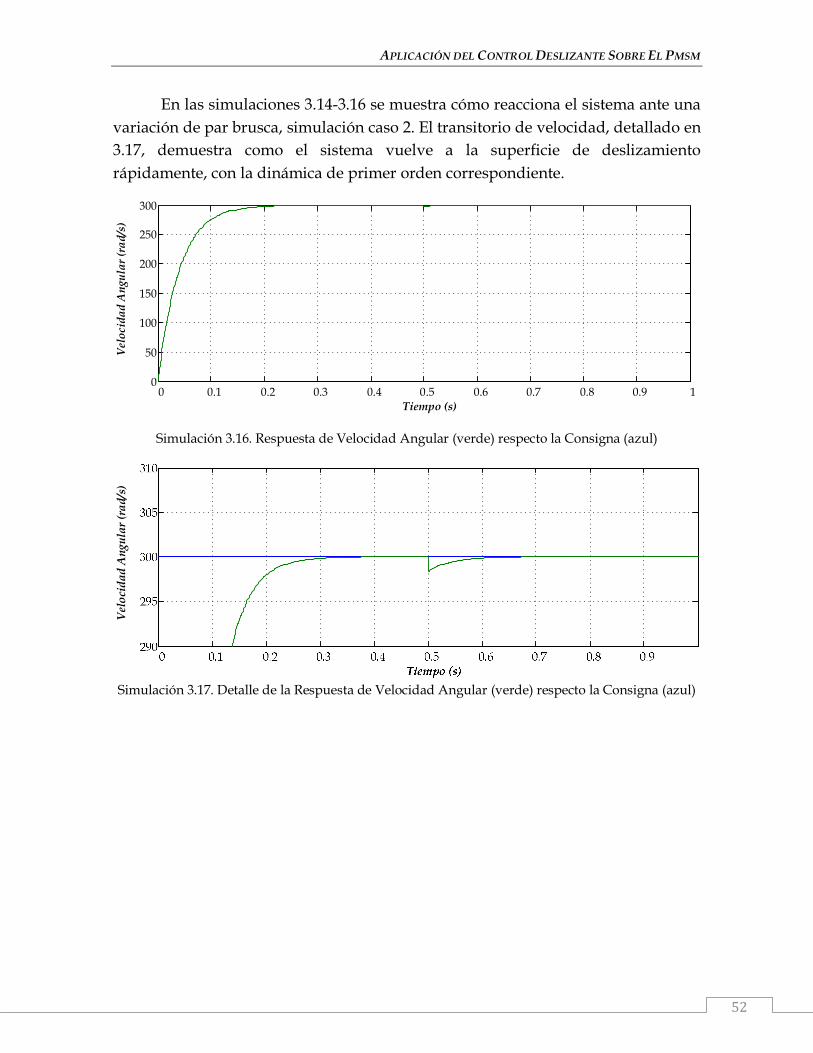
En las simulaciones 3.14-3.16 se muestra cómo reacciona el sistema ante una variación de par brusca, simulación caso 2. El transitorio de velocidad, detallado en 3.17, demuestra como el sistema vuelve a la superficie de deslizamiento rápidamente, con la dinámica de primer orden correspondiente.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
200
250
300
Tiempo (s)
Veloc
idad
Ang
ular
(rad
/s)
Simulación 3.16. Respuesta de Velocidad Angular (verde) respecto la Consigna (azul)
Veloc
idad
Ang
ular
(ra
d/s)
Simulación 3.17. Detalle de la Respuesta de Velocidad Angular (verde) respecto la Consigna (azul)


54
CAPÍTULO 4.
ESTIMACIÓN DE ÁNGULO
Y VELOCIDAD BAJO CONTROL
DESLIZANTE.
4.1 INTRODUCCIÓN A LAS TÉCNICAS DE ESTIMACIÓN.
Como se desprende de los esquemas de control mostrados en el capítulo 2 y 3, es necesaria la inclusión de un sensor de posición en el sistema. Dicho sensor proporciona la posición del rotor y la velocidad de giro de la máquina. Tanto la posición del rotor como la velocidad de giro, son variables que intervienen en el sistema. La posición de rotor para ejecutar la transformada de Clark, y la velocidad para el lazo de control externo.
Los sensores de posición empleados en estos sistemas tienden a reducir la fiabilidad del sistema, además de conllevar un mantenimiento más cuidadoso que otros tipos de sensores, como por ejemplo sensores de corriente. Por otro lado, aumentan el coste del sistema, y la electrónica de acondicionamiento necesaria. Bajo estas premisas, se han desarrollado diversas técnicas de control para poder eliminar el sensor del sistema, adquiriendo la información de una manera indirecta, estimándola. Debido al gran interés que han suscitado estos motores en los últimos tiempos, existen multitud de técnicas que permiten estimar la posición de rotor, manteniendo una buena operación del sistema a pesar de la eliminación del sensor. A modo de introducción y revisión del estado del arte de estas técnicas, se podrían englobar las técnicas entre las que están basadas en el modelo, esto es, el modelo electro-mecánico de la planta; o las técnicas basadas en inyección de portadora, en las cuales se utiliza una señal de prueba que se inyecta al motor para obtener la información deseada.
4.1.1 MÉTODOS DE ESTIMACIÓN DE POSICIÓN BASADOS EN EL MODELO.
Como su propio nombre indica, esta familia de métodos utiliza el modelo matemático de la planta, basado en 4.1-4.4, para estimar variables determinadas

CAPÍTULO 4
55
con la ayuda de las mediciones de variables conocidas. Normalmente las estimaciones de posición se hacen sobre el modelo en alfa-beta, por ser el sistema síncrono en dq independiente de la posición de rotor. Aún así, también existen técnicas que trabajan en el plano dq [12,16,26]. En ocasiones, estos estimadores son tan simples como calcular la variable deseada a partir de una expresión matemática conocida, operando en lazo abierto; y en ocasiones se pueden diseñar estimadores que constan de una realimentación, basados en una planta ficticia, donde se “copia” la dinámica del sistema, se incluyen variables conocidas y se estiman otras variables que eran desconocidas. Los primeros pueden ser denominados como estimadores en lazo abierto, y los segundos como estimadores en lazo cerrado.
)sin( rrmS irvdt
diL θωψαα
αα ⋅⋅+⋅−=⋅ (4.1)
)cos( rrmS irvdt
diL θωψββ
ββ ⋅⋅−⋅−=⋅ (4.2)
pT
JJ
BTe
Jdt
d rmLm
m ωωω
ω=−−= ;
11
(4.3)
[ ]αiβψβiαψpeT ⋅−⋅⋅⋅=2
3
(4.4)
Aunque la estimación de variables en el PMSM no es exclusiva a la posición/velocidad, de hecho es muy usual utilizar estimadores de flujo y de par por ejemplo en el esquema DTC, la estimación de posición/velocidad es la que más estudios centra.
ESTIMADORES EN LAZO ABIERTO
Los estimadores en lazo abierto se pueden considerar como los más simples de implementar, pues únicamente utilizan las expresiones conocidas y despejan la variable a estimar en función de las variables conocidas. A modo de ejemplo, se podría obtener una estimación de la posición del rotor mediante las expresiones 4.1 y 4.2. Podemos llegar a una expresión en base a 4.1 y 4.2, conociendo tensiones y corrientes, que nos da la información requerida en 4.5. La estimación de velocidad es conocida a partir de la estimación de posición en 4.6. Los términos que han sido aislados de 4.1 y 4.2 para obtener las ecuaciones correspondientes al seno y al coseno son normalmente conocidos como back-Fem, o tensiones inducidas por la fuerza
contra-electromotriz.

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
56
⋅−⋅−
⋅+−⋅
= −
dt
diLirv
irvdt
diL
S
S
r
ββββ
ααα
α
θ 1tanˆ
(4.5)
pdt
d rm
rr
ωω
θω
ˆˆ;
ˆˆ ==
(4.6)
Nota: Sea x una variable de estado, la estimación o observación de dicha variable se
expresará como x .
Cabe destacar que el estimador que ha sido expuesto se puede diseñar de manera análoga con las ecuaciones en el sistema dq, para estimar la velocidad. En este caso, la simplicidad conlleva a que la estimación no sea óptima. Por una parte sensible a la calidad del sensado de tensiones y corrientes, y por otra, a la incertidumbre de medida y las ocasionales derivas de resistencia e inductancia. Seguramente este estimador no podría ser empleado si la estimación tuviera que ser utilizada por lazos de realimentación.
ESTIMADORES EN LAZO CERRADO
En estos estimadores, alguna de las variables medibles se utiliza como referencia, y se diseña el esquema del observador en base a su dinámica. Conociendo la dinámica de la planta se puede copiar el sistema, y hacer converger el lazo de control a la entrada de referencia. Existen diversos esquemas que utilizan este tipo de estimadores, como las estructuras basadas en observadores lineales introducidas por Luenberger, observadores no lineales, o sistemas basados en filtros de Kalman [6,10,18,21,22]. Utilizaremos como ejemplo de un estimador en lazo cerrado, un observador sliding, o observador trabajando en modo deslizante [5,13,28]. En las expresiones 4.7 y 4.8 se han redefinido las expresiones del motor en el modelo alfa-beta, donde se incluyen las expresiones back-fem.
αααα
eirvdt
diL s −⋅−=⋅
(4.7)
ββββ
eirvdt
diL s −⋅−=⋅
(4.8)
Siendo las expresiones de back-fem )sin( rrme θωψα ⋅⋅−= ; )cos( rrme θωψβ ⋅⋅= ;

CAPÍTULO 4
57
La idea del observador es introducir las corrientes en alfa-beta en el observador propuesto y hacer converger el sistema hacia este valor mediante un controlador en modo deslizamiento. Cuando el sistema converja, el valor del control equivalente será utilizado como la estimación de los términos αe y βe . Las
expresiones propuestas para el observador en modo deslizante son mostradas en 4.9 y 4.10.
[ ]ααααα
iisignKirvdt
idL s −⋅−⋅−=⋅ ˆˆ
ˆ (4.9)
[ ]ββββ
β
iisignKirvdt
idL s −⋅−⋅−=⋅ ˆˆ
ˆ (4.10)
Si sustraemos las ecuaciones 4.7 y 4.8 de 4.9 y 4.10 obtenemos la expresión de estado del observador en el sistema de errores.
[ ]αααsα
isignKeirdt
idL ⋅−+⋅−=⋅ (4.11)
[ ]βββsβ
isignKeirdt
idL ⋅−+⋅−=⋅ (4.12)
Donde ααα iii −= ˆ y βββ iii −= ˆ . Si se prueba la convergencia del sistema,
mediante un valor de ganancia de estimación K que garantice ( )βα eeK ,max> , el
control equivalente debidamente filtrado dará la estimación en las ecuaciones 4.13 y 4.14. El régimen deslizante se alcanzará después de un tiempo finito, donde se
dará 0=αi y 0=βi .
[ ]eq
isignKe αα ⋅= (4.13)
[ ]eq
isignKe ββ ⋅= (4.14)
Una vez conocidas las fem, podemos aplicar las expresiones 4.15 y 4.16 para obtener las estimaciones deseadas.
β
αθ
e
er
1tanˆ −=
(4.15)
pdt
d rm
rr
ωω
θω
ˆˆ;
ˆˆ ==
(4.16)

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
58
El control equivalente es obtenido mediante filtrado paso bajo del control.
Es importante diseñar cuidadosamente este filtro, pues deberá ser tal que atenúe correctamente la alta frecuencia producida por la conmutación en las inmediaciones de la superficie de deslizamiento, y que a su vez, muestre el control equivalente con una dinámica suficientemente rápida. El esquema del observador se muestra en la figura 4-1.
+
-+
-
s
1
K
i
- L1
rs
i
v
+
-+
-
s
1
K
i
- L1
rs
i
v
LPF
e
e
LPF
Figura 4-1. Estructura de los Observadores Expuestos
El inconveniente fundamental de los esquemas propuestos anteriormente es que basan su cálculo en que el motor ya está funcionando, es decir el motor gira. Con esta premisa los estimadores mostrados y referenciados proporcionan buenas prestaciones, pero se degradan con la reducción de velocidad y no son aplicables en condiciones de velocidad nula, en esquemas por ejemplo de control de posición.
4.1.2 TÉCNICAS BASADAS EN INYECCIÓN DE PORTADORA DE ALTA FRECUENCIA.
En estas técnicas, se utiliza una señal conocida en tensión o corriente [23] que se inyecta al motor. En consecuencia, se crean tensiones o corrientes resultantes de la inyección y se obtiene la información del cómputo de la señal

CAPÍTULO 4
59
inyectada y la señal obtenida. Como se apuntaba en el capítulo 2, lo que permite la estimación de posición es la dependencia que existe entre las inductancias de estator y la posición del rotor en cada momento. En la expresión 4.17 se reescribe la dependencia de la inductancias αβ en dicho plano.
( )( )
∆+∆
∆∆−=
)2cos(2sin
)2sin(2cos
rr
rr
sLsLsL
sLsLsLL r
θθ
θθθ (4.17)
La expresión 4.17 es correspondiente a un motor de imanes permanentes interiores, correspondiente a la figura 2-3. La asimetría de las inductancias es mayor en los motores de imanes interiores que en los de imán superficial. Las técnicas de inyección por tanto son normalmente aplicadas a motores de imán interior [7,8,17]. Aun así, en los de imán superficial también se pueden detectar pequeños efectos de saturación que provocan asimetría, que permiten emplear técnicas similares.
Por lo que respecta a la inyección, mayoritariamente se utilizan portadoras de tensión de alta frecuencia, siendo estas frecuencias mayores que las propias de giro del motor. Existen, principalmente, dos técnicas de inyección de portadora. La primera consiste en la superposición en el vector de tensiones fundamental de la señal de alta frecuencia, principalmente en el plano alfa-beta [8,9] o en el sistema dq [12,26]. Las segundas se basan en la modificación del patrón empleado en la modulación de anchura de pulso (PWM) incluyendo una señal pulsante.
A modo de ejemplo, se muestra la aplicación de inyección de alta frecuencia en tensión sobre un sistema basado en el esquema de control FOC. El esquema resultante de incluir la inyección y la estimación al sistema se muestra en la figura 4-2. Inyectando un vector de tensiones como el mostrado en la expresión 4.18, se puede demostrar [8,9] que las corrientes obtenidas en la salida del motor responden a la matriz definida en 4.19.

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
60
Figura 4-2. Sistema FOC con Inyección de Portadora para Estimación de Posición.
−=
=
)cos(
)sin(ˆ
ti
tiiV
v
vv
HF
HF
ω
ω
β
α
(4.18)
−+
−+=
=
)2sin()sin(
)2cos()cos(
10
10
tItI
tItI
i
ii
iri
iri
HF
HF
ωθω
ωθω
β
α (4.19)
Siendo iqd
Si
LL
LVI
ω⋅⋅
⋅=
ˆ0 ,
iqd
Si
LL
∆LVI
ω⋅⋅
⋅=
ˆ1 ,
2
DQS
LLL
+= ,
2
DQ LLLs
−=∆ .
En la expresión 4.19 se aprecia como la posición del rotor aparece en forma de armónico de la componente de alta frecuencia de la corriente de salida. Tras un conveniente procesado de señal [4,9], se obtiene la posición de rotor. La mayor ventaja de las técnicas de inyección es la independencia de la velocidad del motor, pudiendo funcionar a velocidad nula para controles de posición. Como desventaja reseñar la inyección de pérdidas adicionales y ruido al sistema, derivadas de la excitación de alta frecuencia de los devanados de estator.

CAPÍTULO 4
61
4.2 INYECCIÓN DE ALTA FRECUENCIA EN TENSIONES ααααββββ. PROBLEMÁTICA. Después de lo mostrado hasta ahora, es importante poder aplicar técnicas de
estimación de posición al PMSM cuando está siendo controlado por cualquiera de los esquemas propuestos (FOC, DTC, Sliding….). Se ha expuesto que para velocidades suficientemente elevadas, las técnicas basadas en el modelo, producen resultados satisfactorios. Los problemas surgen con velocidades reducidas, o cuando el motor se encuentra parado, donde estas técnicas no dan una estimación correcta, siendo necesaria alguna otra técnica para seguir prescindiendo del sensor de posición. Las técnicas de inyección de señal subsanan este problema, pues son inherentemente independientes de la velocidad, y funcionan en cualquier régimen de vueltas de la máquina. Aún así, la inyección de señal normalmente implica la introducción de ruido de alta frecuencia en el motor, además de incrementar las pérdidas totales de la máquina. Normalmente, los esquemas basados en inyección de señal de alta frecuencia son aplicados cuando el motor está parado o con un bajo régimen de vueltas, como en el arranque, y dejan de funcionar cuando el motor alcanza una velocidad suficientemente elevada, siendo entonces utilizado algún otro método basado en el modelo.
Si se desea realizar un control que implique que el motor opere a bajas vueltas,
o directamente implementar un control de posición, es interesante la aplicación de alguna técnica que permita la estimación de posición a velocidad nula o muy baja. Esto es, se necesitan aplicar técnicas de inyección. En la figura 4-2 se ha mostrado el esquema clásico empleado en un control FOC con inyección de portadora de alta frecuencia en el plano αβ . Este mismo sistema presenta inconvenientes si es aplicado a otros esquemas de control, como podrían ser el esquema DTC o el esquema basado en controladores deslizantes.
Fijándonos de nuevo en la figura 4-2, las señales de inyección de estos sistemas
se fijan de tal manera que los controladores PI no puedan actuar contra ellas. De esta manera, evitan que el propio control las elimine, tratándolas como perturbaciones. Es relativamente sencillo sintonizar un controlador PI para hacer que a partir de una frecuencia no amplifiquen o incluso atenúen las señales de error que les llegan. Podríamos hablar del ancho de banda del controlador, que se muestra en la figura 4-3. El controlador PI tiene un polo en el origen, donde la ganancia tiende a infinito, y un cero que como se desprende de 4-3 puede ser fijado en consecuencia para que la inyección de alta frecuencia quede atenuada. Dando los valores propicios a KI y KP se fija el control de manera deseada. Las señales de corriente de 4.19 serán realimentadas hacia los controladores de corriente tipo PI, si estas señales al ser realimentadas se atenúan fuertemente, la acción de control no contendrá ningún armónico que tienda a cancelarlas, y la inyección se mantendrá en el sistema.

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
62
Figura 4-3. (a) Respuesta controlador tipo PI. (b) Respuesta controladores tipo DTC o SMC
Se puede demostrar este fenómeno retomando el sistema definido en el
capítulo 2. Las funciones de transferencia 2.14 y 2.15 responden a las dinámicas de las corrientes en dq, si suponemos que están desacopladas y que la velocidad varía de una manera suficientemente lenta, podemos aproximar la dinámica asociada a dq a un sistema lineal como:
)(1
)(
)(sH
rsLsv
si
sDQDQ
DQ=
+= (4.20)
Planteando el sistema equivalente del control en corriente, incluyendo la perturbación al lazo de control, como se muestra en la figura 4-4, podemos analizar cómo influye el controlador en frente a una perturbación.
Figura 4-4. (a) Sistema de Control Equivalente en dq Perturbado
Suponiendo la planta lineal podemos aplicar superposición obteniendo la siguiente expresión para las corrientes resultantes dq:
)()(1
)()(
)()(1
)()()(*)(
sHsGc
sHsv
sHsGc
sHsGcsisi HFDQDQ
⋅+⋅+
⋅+
⋅= (4.21)
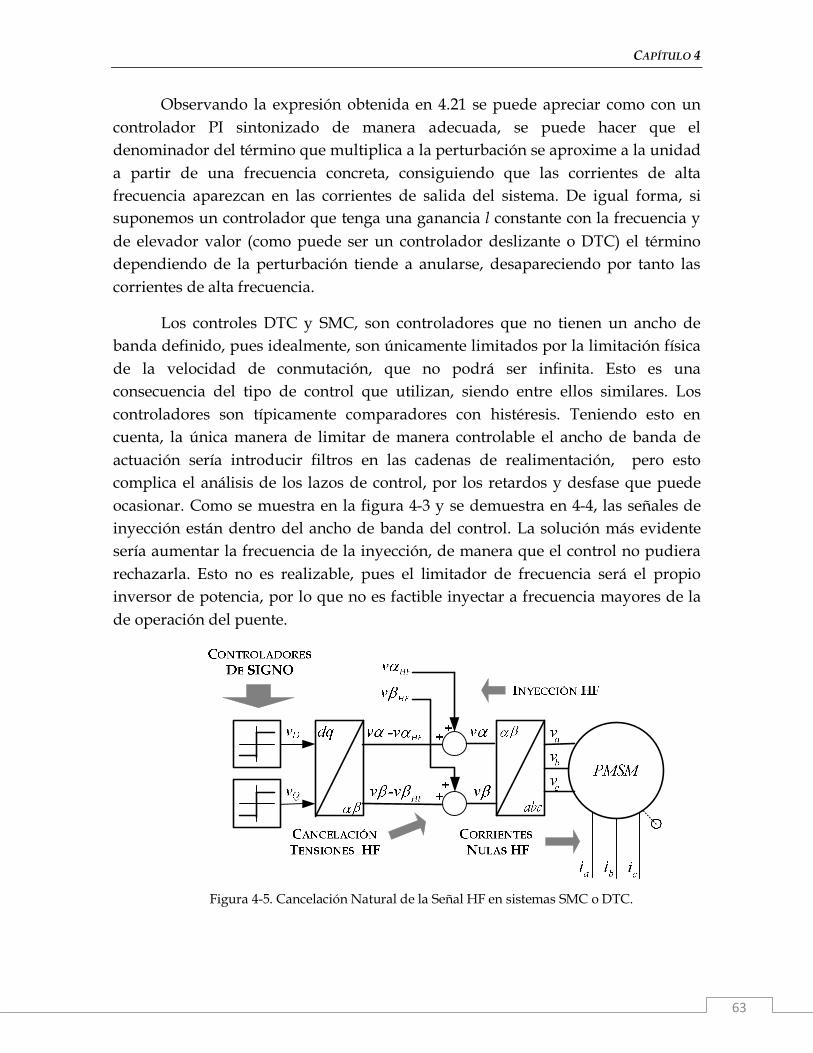
CAPÍTULO 4
63
Observando la expresión obtenida en 4.21 se puede apreciar como con un controlador PI sintonizado de manera adecuada, se puede hacer que el denominador del término que multiplica a la perturbación se aproxime a la unidad a partir de una frecuencia concreta, consiguiendo que las corrientes de alta frecuencia aparezcan en las corrientes de salida del sistema. De igual forma, si suponemos un controlador que tenga una ganancia l constante con la frecuencia y de elevador valor (como puede ser un controlador deslizante o DTC) el término dependiendo de la perturbación tiende a anularse, desapareciendo por tanto las corrientes de alta frecuencia.
Los controles DTC y SMC, son controladores que no tienen un ancho de banda definido, pues idealmente, son únicamente limitados por la limitación física de la velocidad de conmutación, que no podrá ser infinita. Esto es una consecuencia del tipo de control que utilizan, siendo entre ellos similares. Los controladores son típicamente comparadores con histéresis. Teniendo esto en cuenta, la única manera de limitar de manera controlable el ancho de banda de actuación sería introducir filtros en las cadenas de realimentación, pero esto complica el análisis de los lazos de control, por los retardos y desfase que puede ocasionar. Como se muestra en la figura 4-3 y se demuestra en 4-4, las señales de inyección están dentro del ancho de banda del control. La solución más evidente sería aumentar la frecuencia de la inyección, de manera que el control no pudiera rechazarla. Esto no es realizable, pues el limitador de frecuencia será el propio inversor de potencia, por lo que no es factible inyectar a frecuencia mayores de la de operación del puente.
Figura 4-5. Cancelación Natural de la Señal HF en sistemas SMC o DTC.

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
64
La histéresis en los controladores tiende a fijar la frecuencia de operación. Aún así no es tampoco factible limitar con estas bandas la frecuencia máxima de operación, pues además de degradar seriamente la respuesta del controlador, introducen un gran rizado en el sistema.
Como consecuencia, la misma técnica empleada con un SMC o un DTC (ver figura 4.5), con el mayor ancho de banda, provocan una cancelación natural de la inyección, que es tratada por el controlador como una perturbación. Volviendo a la expresión de señal de inyección mostrada en 4.18, esta inyección es anulada por el control. Cabe destacar que la cancelación de la señal se produce antes de la inyección al motor y no después, lo que hace que la tensión de prueba de alta frecuencia aplicada al motor sea cero, en régimen estacionario, siendo nulo el vector de corrientes definido en 4.19.
4.3 INYECCIÓN EN DQ Y ESTIMACIÓN MEDIANTE CONTROL EQUIVALENTE. En el apartado anterior se justifica por que las técnicas tradicionales de
inyección en tensión de alta frecuencia en el plano αβ no dan buenos resultados aplicados al DTC o al SMC. La acción de control de e
stos controladores anulan la inyección y la salida en corrientes esperada no se produce. Aún así, el hecho de incluir una perturbación conocida al sistema hace que, de una manera indirecta, podamos extraer información de la planta a través de la acción de control que el sistema ejerce sobre ella. Es decir, si hablamos de un sistema controlado por controladores deslizantes, la cancelación natural de la perturbación quedará implícita en el control equivalente. Para ello, se pueden introducir perturbaciones conocidas en puntos del sistema determinados, y dejar simplemente que el sistema las cancele de manera natural, cuando lleguemos al régimen deslizante, el valor de referencia y el real de las variables controladas serán iguales. Podemos por ejemplo estudiar el efecto de la introducción de perturbaciones en el sistema propuesto en 3.2. Introducimos las ecuaciones de estado del motor en el plano dq:
QQrDSDD
D iLirvdt
diL ⋅⋅+⋅−=⋅ ω (4.22)
mrDDrQSQQ
Q iLirvdt
diL ψωω ⋅−⋅⋅−⋅−=⋅ (4.23)
( ) LrQDDQQmr
TJJ
BiiLL
J
pi
J
p
dt
d 1
2
3
2
3−−⋅⋅−
⋅
⋅+⋅
⋅
⋅⋅= ω
ψω (4.24)
Se introduce una señal de perturbación conocida en la corriente en d, de la manera que se representa en la figura 4-6.

CAPÍTULO 4
65
Figura 4-6. Sistema Propuesto para Estimación de Velocidad Mediante Inyección HF en
Corriente en d. Se puede decir que se modifica la consigna de corriente en d, los valores
deseados de corriente son los que se fijan en las superficies definidas en 4.25 y 4.26.
DPDD iiiS −+=* (4.25)
QQQ iiS −=*
(4.26) Donde se define la perturbación como )sin( tAi ip ω⋅= . Las ecuaciones del
sistema en régimen deslizante ( 0,0 == QD SS ) se reescriben en 4.27-4.29.
( ) **
*
QQrPDSDeqp
DD
D iLiirvdt
diL
dt
diL ⋅⋅++⋅−=⋅+⋅ ω (4.27)
( ) mrPDDrQSQedQ
Q iiLirvdt
diL ψωω ⋅−+⋅⋅−⋅−=⋅
**
*
(4.28)
( ) ( ) LrQPDDQQmr
TJJ
BiiiLL
J
pi
J
p
dt
d 1
2
3
2
3 ***−−⋅+⋅−
⋅
⋅+⋅
⋅
⋅⋅= ω
ψω (4.29)
La superficie en corriente en q sigue siendo invariante en el tiempo, por lo que podemos decir que si el régimen deslizante se garantiza, podremos estudiar el control equivalente asociado a la tensión en q para extraer la información deseada. La superficie en d deja de ser constante, pues estamos inyectando una referencia

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
66
dependiente de t, por lo que la derivada asociada en d no será cero. Esto no quiere decir que no se puede extraer el control equivalente asociado que aparecerá en d, ello pasará por resolver la ecuación diferencial mostrada en 4.27. Si se hace en 4.28, resulta una ecuación ordinaria.
Para garantizar el régimen deslizante se deben cumplir:
0<⋅dt
dSS
QQ (4.30)
[ ] 01
<⋅−⋅⋅−⋅⋅−⋅−⋅⋅ mePDrDDrQSQ
Q
Q iLiLirvL
S ψωωω (4.31)
Sumamos y restamos el control equivalente:
[ ] 01
<⋅−⋅⋅−⋅⋅−⋅−−+⋅⋅ MePDeDDeQQeqQeqQ
Q
Q iLiLiRvvvL
S φωωω (4.32)
Siendo la ley de control:
)(0 QQQ Ssignvv ⋅−= (4.33)
El control equivalente en q resulta de hacer nulas las derivadas en 4.28. Si definimos
npQv como el valor equivalente con el sistema sin perturbar
)(sin tALvv DenpQQeq ωω ⋅⋅⋅=− (4.34)
Siendo PDeMeDDeQQeq iLiLiRv ⋅⋅+⋅+⋅⋅+⋅= ωφωω**
Filtrando paso bajo el control se obtiene el control equivalente de la tensión en q, la cual tendrá un valor medio dependiente del valor definido por los valores de referencia, más una componente de frecuencia igual a la perturbación y con amplitud dependiente de la velocidad angular y del valor de inductancia. Se puede extraer información por tanto de esta cancelación de la perturbación, debido a que se obtiene una señal de frecuencia conocida modulada en amplitud. Con un procesado simple se llega a la velocidad estimada del motor. Este método no difiere en exceso de los basados en el modelo, pues a velocidad cero no es posible extraer ninguna información, y tampoco permite estimar la posición de rotor. Aún así, muestra como la cancelación de la perturbación origina cambios detectables en el sistema, pero desde un punto de vista de la acción de control.

CAPÍTULO 4
67
SIMULACIÓN CASO 1.
INVERSIÓN DE GIRO A VELOCIDAD Y PAR NOMINAL
Se muestra la estimación de velocidad utilizando el esquema propuesto en 4-6, para el caso de simulación 1.
Ten
sión
(V)
Simulación 4.1. Control Equivalente Filtrado Paso Bajo en las Tensiones d (azul) y q (verde)
Las figuras de 4.1 a 4.4 muestran los resultados del sistema con la inyección aplicada en la superficie en d. De las tensiones en dq de la simulación 4.1 se observa como la perturbación afecta a ambos controles equivalentes, aunque la información se encuentra en la tensión en q. La tensión en d es un reflejo de la impedancia del motor en alta frecuencia, por lo que sería útil para una ocasional estimación de ésta. Las simulaciones 4.2 y 4.3 muestran la modulación en amplitud que sufre el control equivalente de q filtrándolo paso-banda, y la final estimación de velocidad a partir de un procesado simple esquematizado en la figura 4-6.

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
68
Simulación 4.2. Tensión en q extraída del Filtro Pasa-banda
Simulación 4.3. Detalle de Tensión en q extraída del Filtro Pasa-banda.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-400
-200
0
200
400
Tiempo (s)
Vel
ocid
ad A
ngul
ar (r
ad/s
)
Simulación 4.4. Velocidad real (azul) y estimada (verde) extraída del procesado.
SIMULACIÓN CASO 2.
ARRANQUE A VELOCIDAD NOMINAL CON VARIACIÓN DE PAR
La simulación 4.5 muestra la modulación de amplitud que se produce en el caso de simulación 2, y la extracción de la estimación en 4.6. La no aplicación de par al inicio de la simulación degrada la estimación, debido a que en esas condiciones, las componentes asociadas al control de la máquina se encuentran, en mayor medida, dentro de la banda del filtro de entrada del procesado.

CAPÍTULO 4
69
Simulación 4.5. Tensión en q extraída del Filtro Pasa-banda
Vel
ocid
ad A
ngul
ar (ra
d/s)
Simulación 4.6. Velocidad real (azul) y estimada (verde) extraída del procesado.
SIMULACIÓN CASO 3.
INVERSIÓN DE GIRO AL 1% DE VELOCIDAD LA NOMINAL Y PAR NOMINAL
Se muestra la estimación de velocidad para el caso de 1% de la velocidad nominal y par nominal. Se desprende de la simulación 4.7 que la estimación se degrada, pues la modulación en amplitud es menor, y el error asociado al procesado efectuado es más evidente. Aún así la estimación es posible.

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
70
Simulación 4.7. Velocidad real (azul) y estimada (verde) extraída del procesado.
Simulación Caso 4.
VARIACIÓN DE PAR DE 0 A NOMINAL CON REFERENCIA DE VELOCIDAD NULA
La estimación de velocidad para el caso de simulación 4 se muestra a continuación. Se observa cómo se obtiene un valor aceptable, aún apareciendo ruido después del segundo transitorio.
Vel
ocid
ad A
ngul
ar (ra
d/s)
Simulación 4.8. Velocidad real (azul) y estimada (verde) extraída del procesado.
En definitiva, y a pesar de obtener buenos resultadas de estimación, no es un método útil para poder ser utilizado en condiciones de velocidad bajas o nulas, pues el funcionamiento depende de la velocidad, sin poder estimar la posición de rotor en estas condiciones. Aún así, demuestra como en el control equivalente podemos encontrar información de las variables del sistema.

CAPÍTULO 4
71
4.4 INYECCIÓN EN ααααββββ.Y ESTIMACIÓN MEDIANTE PROCESADO DE SEÑAL. Como se ha demostrado en el punto anterior, la acción de control del sistema contiene información de las posibles perturbaciones que le afecten. Siendo éstas conocidas, se pueden estimar valores de manera indirecta. Aún así, esta estimación conlleva la necesidad de conocer parámetros del motor con precisión, como la inductancia de estator. Se puede proponer un sistema basado en el control equivalente, pero que utilice la idea original de la inyección de portadora explicada en 4.1.2, teniendo en cuenta el comportamiento del ancho de banda del control deslizante introducido en 4.2. Teniendo esto en cuenta, es razonable elegir una señal de corriente HF como señal de prueba, e introducirla en los lazos de control de corriente en αβ. La cancelación natural de estas perturbaciones generará la información deseada en el control equivalente en el plano alfa-beta del sistema resultante. No podemos hablar de una inyección real de corriente en la planta, pues en realidad introduciendo las señales HF en el lazo de control, se está consignando una corriente por el motor, pero en este caso se consigna en el plano αβ en lugar de dq, para poder detectar la asimetría en las inductancias del motor en el control equivalente en HF.
Figura 4-7. Sistema Propuesto para Estimación Mediante Inyección HF Basado en el Control
Equivalente Con este método, el procesado de señal necesario para la extracción de la estimación del ángulo, debe ser hecho en las tensiones αβ, donde se encuentra el control equivalente. La figura 4-7, muestra el sistema propuesto con la inyección

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
72
HF en los lazos de corriente y el procesado en las tensiones αβ . Podemos seguir los pasos indicados en el apartado 4.1.2, para llegar a las expresiones esperadas en la tensión equivalente que contienen la información deseada. Las ecuaciones del motor en el plano αβ, incluyendo asimetría se muestran en 4.35.
[ ]
⋅⋅+
⋅⋅+
⋅=
+
+
)sin(
)cos(
r
r
dt
d
i
i
dt
dL
i
ir
vv
vvmrS
HF
HF
θ
θψ
β
αθ
β
α
ββ
αα (4.35)
Siendo :
( )( )
∆+∆
∆∆−=
)2cos(2sin
)2sin(2cos
rr
rr
sLsLsL
sLsLsLL r
θθ
θθθ (4.36)
Suponiendo que el sistema trabaja en régimen deslizante, los valores de las corrientes en dq serán:
DDDDDD iiiiSS ˆˆ,0**
=→−== (4.37)
QQQQQQ iiiiSS ˆˆ,0**
=→−== (4.38)
Las corrientes en αβ en el sistema perturbado se definen acorde a la transformación del plano rotario dq y son:
⋅+⋅
⋅−⋅=
)cos()sin(
)sin()cos(
ˆ
ˆ
**
**
rQrD
rQrD
ii
ii
i
i
θθ
θθ
β
α (4.39)
De la figura 4-7 se puede deducir la relación que existe entre la corriente del motor, la del sistema perturbado y la propia señal que se suma en el lazo de control, siendo:
+
+=
HF
HF
ii
ii
i
i
ββ
αα
β
α
ˆ
ˆ (4.40)
Por lo que fácilmente se puede deducir las corrientes resultantes en el motor:
HFrQrD iiii αα θθ −⋅−⋅= )sin()cos(** (4.41)
HFrQrD iiii ββ θθ −⋅+⋅= )cos()sin(**
(4.42) En las corrientes presentes en el motor, se encuentran las corrientes que se suman en la lazo de realimentación de la corriente αβ, pero con inversión de signo,

CAPÍTULO 4
73
manifestando la cancelación impuesta por los controladores en modo deslizamiento deducidas en 4.41 y 4.41. Siendo el vector de corrientes sumadas a las fundamentales las mostradas en 4.43:
−⋅−=
)cos(
)sin(
t
tA
i
i
i
iP
HF
HF
ω
ω
β
α (4.43)
Resulta en el motor:
−⋅=
−
)cos(
)sin(
t
tA
i
i
i
i
P
HF
HF
ω
ω
β
α (4.44)
Teniendo en cuenta que la señal de inyección se hará a frecuencia mayor de la propia de la velocidad de giro, se puede definir un sistema del motor en el plano αβ en alta frecuencia, en el cual puede asumirse que las tensiones inducidas por las fem (definidas en 4.2 como )sin( re rm θωψα ⋅⋅−= ; )cos( re rm θωψβ ⋅⋅= ) son despreciables comparándolas con las tensiones producidas por la impedancia reactiva. Por otra parte, el término resistivo es habitualmente pequeño, y puede ser despreciado de igual forma. El modelo simplificado en alta frecuencia es caracterizado por 4.45
( )( )
⋅⋅
∆+∆
∆∆−=
HF
HF
HF
HF
i
i
dt
d
sLsLsL
sLsLsL
v
v
rr
rr
β
α
β
α
θθ
θθ
)2cos(2sin
)2sin(2cos (4.45)
Introduciendo las corrientes definidas en 4.44 en el modelo de alta frecuencia definido en 4.45, y resolviendo la expresión diferencial resultante, se obtiene la tensión que aparecerá en la acción de control para producir dicho vector de corrientes. Las tensiones resultantes quedan definidas en 4.46.
⋅−⋅⋅+⋅⋅
⋅−⋅⋅+⋅⋅≈
=
)2sin()sin(
)2cos()cos(
10
10
tvtv
tvtv
v
vv
iri
iri
HF
HF
HF
ωθω
ωθω
β
α
(4.46)
Donde SPi LAv ⋅⋅−= ω0 ; SPi LAv ∆⋅⋅= ω1 ;
Las tensiones definidas en 4.46 tienen la misma estructura que las corrientes resultante de la inyección de tensión en el sistema FOC expresadas en 4.19, expuesto en el apartado 4.1. En consecuencia, se puede utilizar el mismo procesado de señal que se aplica a estos esquemas de control, los cuales han sido experimentados con éxito en diversos estudios [8,9]. Es importante notar que la estructura resultante en 4.46 facilita el procesado, pues los términos dependientes de la frecuencia de inyección y la posición del motor, aparecen en la secuencia inversa. Esto es, que en el primer término la frecuencia de inyección aparece con
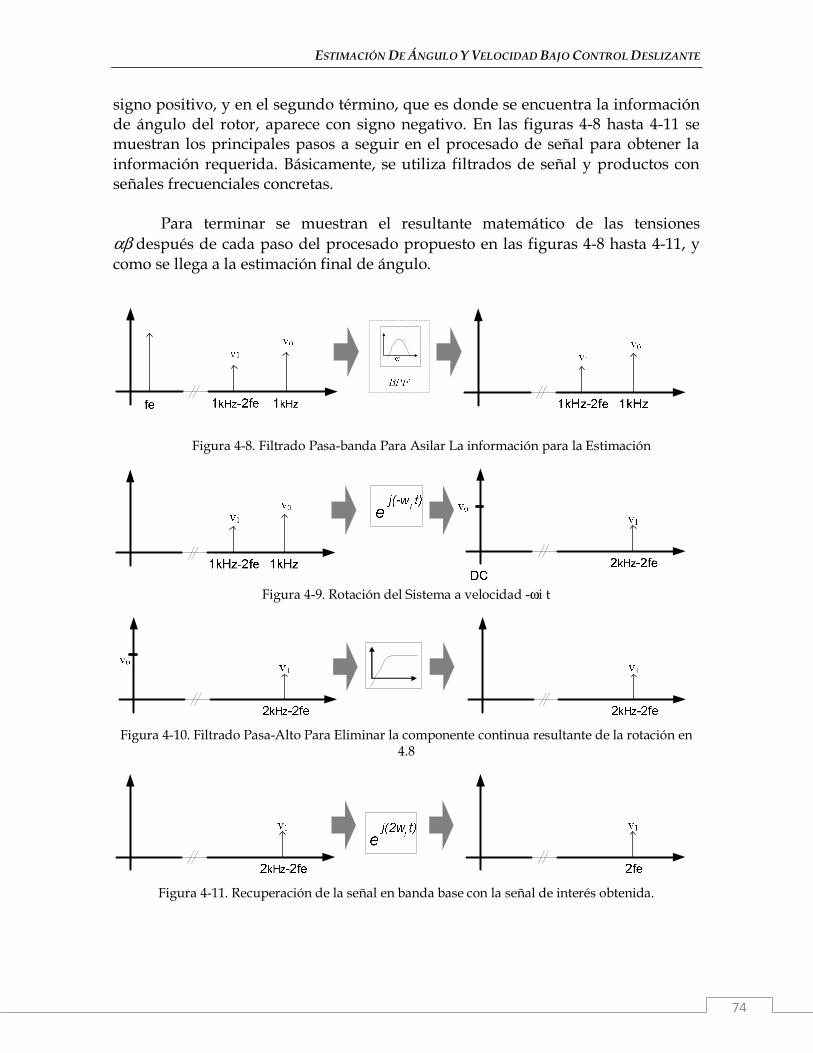
ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
74
signo positivo, y en el segundo término, que es donde se encuentra la información de ángulo del rotor, aparece con signo negativo. En las figuras 4-8 hasta 4-11 se muestran los principales pasos a seguir en el procesado de señal para obtener la información requerida. Básicamente, se utiliza filtrados de señal y productos con señales frecuenciales concretas. Para terminar se muestran el resultante matemático de las tensiones αβ después de cada paso del procesado propuesto en las figuras 4-8 hasta 4-11, y como se llega a la estimación final de ángulo.
Figura 4-8. Filtrado Pasa-banda Para Asilar La información para la Estimación
Figura 4-9. Rotación del Sistema a velocidad -ωi t
Figura 4-10. Filtrado Pasa-Alto Para Eliminar la componente continua resultante de la rotación en 4.8
Figura 4-11. Recuperación de la señal en banda base con la señal de interés obtenida.

CAPÍTULO 4
75
Las ecuaciones resultantes de los pasos seguidos anteriormente, partiendo desde la expresión 4.46, hasta la estimación final de ángulo utilizando este esquema se muestran desde 4.47-4.50.
)2( trjS
tjSPiHF
ii eLeLAv ωθωαβ ω −⋅∆+⋅−⋅⋅= (4.47)
)22( trjSSPiHF
ieLLAv ωθαβ ω −⋅∆+−⋅⋅= (4.48)
)22( trjSPiHF
ieLAv ωθαβ ω −⋅∆⋅⋅= (4.49)
rjSPiHF eLAv θ
αβ ω 2⋅∆⋅⋅= (4.50)
Una vez aisladas las señales de interés, la estimación se extrae utilizando la arcotangente de ambas señales. Cabe notar que la frecuencia resultante obtenida es el doble de la real del motor, por lo que es necesario la adecuación a la mitad de esta frecuencia.
HF
HFr
v
v
β
αθ 1
tan2
1ˆ −⋅= (4.51)
pdt
d rm
rr
ωω
θω
ˆˆ;
ˆˆ ==
(4.52)

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
76
Simulación Caso 2.
ARRANQUE A VELOCIDAD NOMINAL CON VARIACIÓN DE PAR
Se muestra los resultados de simulación para el caso 2 del sistema propuesto en 4-7. La estimación de la posición de rotor es extraída correctamente de la tensión equivalente en αβ. El error asociado a la estimación en 4.9 no es despreciable debido a que el motor está girando a su velocidad nominal, y armónicos propios del control del motor se están introduciendo en el procesado de señal.
Áng
ulo
(rad
)
Simulación 4.8. Ángulo eléctrico estimado (verde) y real (azul).
Err
or d
e Á
ngul
o (º)
Simulación 4.9. Error de ángulo
En las señales de posición de 4.10 se observan pequeños armónicos de frecuencia elevada que no son totalmente atenuados y producen el error que se muestra en 4.9. La estimación de velocidad se muestra en 4.11, siendo bastante limpia, y presentando un retardo asociado a un filtrado paso-bajo.

CAPÍTULO 4
77
Ten
sión
(V)
Simulación 4.10 Señales de Posición Extraídas del control Equivalente y el Procesado
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45-100
0
100
200
300
400
Tiempo (s)
Vel
ocid
ad A
ngul
ar (r
ad/s
)
Simulación 4.11 Velocidad Angular de Referencia (azul) , Estimada (Roja) y Real (verde)
Simulación Caso 3.
INVERSIÓN DE GIRO AL 1% DE VELOCIDAD LA NOMINAL Y PAR NOMINAL
Áng
ulo
(rad
)
Simulación 4.12. Ángulo eléctrico estimado (verde) y real (azul).
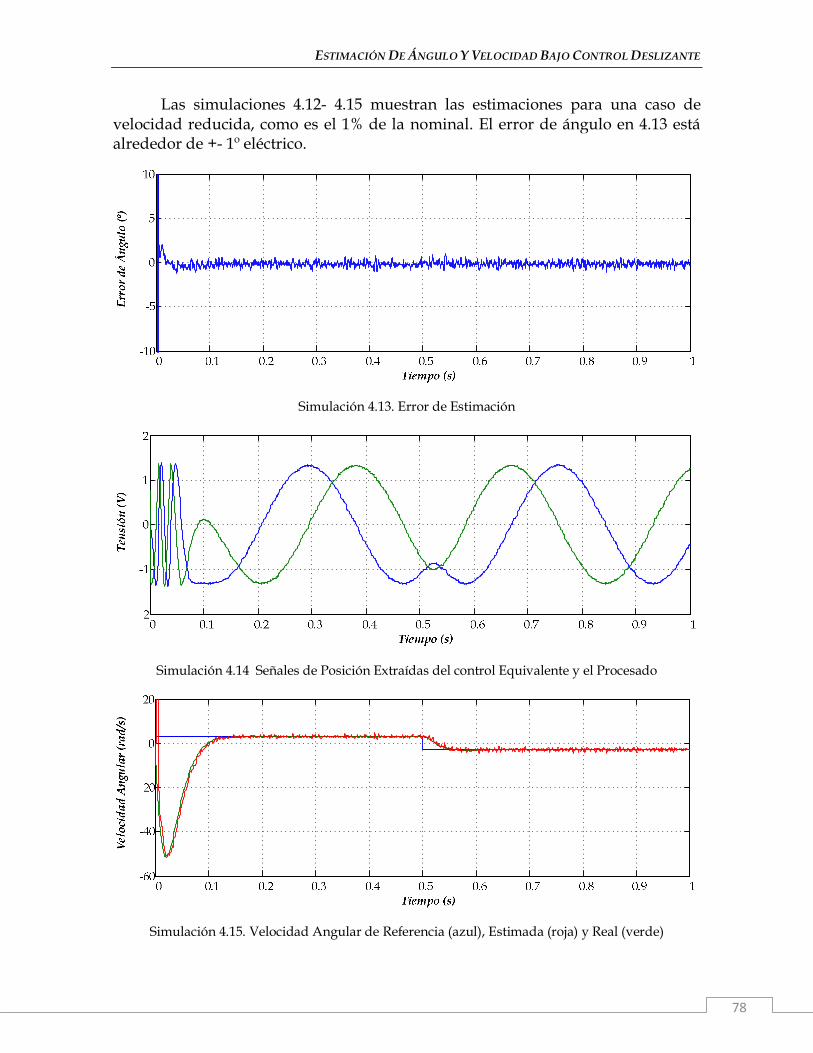
ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
78
Las simulaciones 4.12- 4.15 muestran las estimaciones para una caso de velocidad reducida, como es el 1% de la nominal. El error de ángulo en 4.13 está alrededor de +- 1º eléctrico.
Simulación 4.13. Error de Estimación
Simulación 4.14 Señales de Posición Extraídas del control Equivalente y el Procesado
Simulación 4.15. Velocidad Angular de Referencia (azul), Estimada (roja) y Real (verde)

CAPÍTULO 4
79
Simulación Caso 4.
VARIACIÓN DE PAR DE 0 A NOMINAL CON REFERENCIA DE VELOCIDAD NULA
Test importante para el sistema propuesto en 4-7 es la respuesta a una variación de par como define en el caso 4.
Áng
ulo
(rad
)
Simulación 4.16. Ángulo eléctrico estimado (verde) y real (azul).
Err
or d
e Á
ngul
o (º
)
Simulación 4.17. Error de Estimación de Ángulo Eléctrico.
Simulación 4.18. Señales de Posición Extraídas del control Equivalente y el Procesado.

ESTIMACIÓN DE ÁNGULO Y VELOCIDAD BAJO CONTROL DESLIZANTE
80
Simulación 4.19. Velocidad Angular Estimada(verde) y Real (azul).
Las figura de simulación 4.16-4.19 muestran como por un lado la estimación de ángulo es correcta, aumentando el error en los transitorios de par, y volviendo rápidamente a errores centrados en cero. La estimación de velocidad también muestra una buena respuesta dinámica según 4.19 y con error reducido.


82
CAPÍTULO 5.
SISTEMA DE CONTROL
SENSORLESS BAJO CONTROL
DESLIZANTE.
5.1 INTRODUCCIÓN.
A partir de lo expuesto en el capítulo 4, la aplicación final de la estimación del ángulo es poder prescindir del sensor de posición/velocidad. Utilizar la estimación extraída del procesado para la transformadas dq, e igualmente la estimación de velocidad para el lazo de control externo es un paso importante desde el punto de vista de la estructura de control. En los esquemas propuestos en los sistemas FOC, este paso es normalmente trivial, pues si se tiene una estimación correcta en lazo abierto, con las correcciones pertinentes de fase que ocasionan los filtros del procesado, la estimación es utilizada sin problemas para cerrar el lazo, y conseguir un sistema conocido como Sensorless.
En este proyecto, se ha expuesto el estudio de la aplicación de estas técnicas de inyección de señal a esquemas de control en modo deslizamiento, desarrollando y justificando en el capítulo 4 la problemática que presentaban, el porqué del no funcionamiento con inyecciones de tensión, y la alternativa y metodología de la inyección de corrientes y la utilización del control equivalente en esquemas sliding. La utilización de este sistema conlleva algunos aspectos que hacen más complicado la utilización de la estimación en los lazo de realimentación y en las transformadas coordinadas dq. El mayor ancho de banda de los controladores, hace que además de las perturbaciones, posibles errores de estimación de ángulo pueden conllevar en acciones de control que perturben y degraden la propia estimación, y no permitan la realimentación simple de la estimación para la obtención del sistema sensorless. En el apartado que ahora se introduce, se desgranan las ecuaciones que resultan de la introducción de una estimación con un error dado, las tensiones adicionales que resultan, y la metodología que se emplea para poder utilizar la estimación en el esquema propuesto.

CAPÍTULO 5.
83
5.2. SISTEMA SENSORLESS MEDIANTE INYECCIÓN DE FRECUENCIA EN
CORRIENTE Y PROCESADO DE SEÑAL. CONTROL DESLIZANTE DE
CORRIENTES Y CONTROL EXTERNO PI DE VELOCIDAD.
Partiendo del sistema propuesto en el apartado 4.4, se utiliza dicha estimación para las transformadas coordinadas en dq y de la estimación de posición se extrae también la estimación de velocidad para el lazo de control externo. El esquema 5-1 muestra el esquema actualizado donde se presenta como la estimación es introducida al sistema.
Figura 5-1. Sistema Sensorless Propuesto
Se plantea el impacto de utilizar la propia estimación en las transformadas, y cómo influye el hecho de introducir un error en la estimación, cómo reaccionan los controladores deslizantes en frente a esto, y como se comporta la estimación de posición, la cual recordamos está basada en el control equivalente del sistema. El modelo del motor en αβ con asimetría, según se definió en el capítulo 2, es el mostrado en 5.1.
[ ]
⋅+
⋅+
⋅=
)sin(
)cos(
r
r
mrS
dt
d
i
i
dt
dL
i
ir
v
v
θ
θψ
β
αθ
β
α
β
α
(5.1)

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
84
Siendo :
( )( )
∆+∆
∆∆−=
)2cos(2sin
)2sin(2cos
rr
rr
sLsLsL
sLsLsLL r
θθ
θθθ (5.2)
Las señales inyectadas en los lazos de corriente se definen en 5.3 acorde al esquema mostrado en 5-1.
( )( )
⋅−
⋅=
tA
tA
i
i
i
i
HF
HF
ω
ω
β
α
cos
sin
*
*
(5.3)
En la expresión 5.4 se simplifica el término dependiente de la resistencia de estator por ser de pequeño valor.
[ ] ( )( )
⋅+
⋅+
⋅−⋅=
)sin(
)cos(
cosˆ
sinˆ
r
r
m
i
ir
dt
d
tAi
tAi
dt
dL
v
v
θ
θψ
ω
ω
β
αθ
β
α
(5.4)
Siendo HFLFHFLF vvvvvv βββααα +=+= ; .
Podemos ahora suponer que la estimación extraída del control equivalente de las tensiones en αβ, no contiene ningún error asociado, debido al filtrado y posterior procesado efectuado sobre las tensiones del sistema. Por tanto suponemos que:
rr θθ =ˆ (5.5)
Bajo régimen deslizante se cumple que ** ˆ;ˆQQDD iiii == , podemos aplicar la
transformada de Park y, por consiguiente, se llega a la expresión 5.6.
⋅+⋅
⋅−⋅=
⋅
−=
)cos()sin(
)sin()cos(
)cos()sin(
)sin()cos(
ˆ
ˆ
**
**
*
*
rQrD
rQrD
Q
D
rr
rr
ii
ii
i
i
i
i
θθ
θθ
θθ
θθ
β
α
(5.6)
Podemos substituir la expresión 5.6 en 5.4 para llegar a 5.7.
[ ] ( )( )
+
⋅+⋅+⋅
⋅−⋅−⋅⋅⋅=
β
αθ
β
α
ωθθ
ωθθ
e
e
tAii
tAii
dt
dL
v
v
irQrD
irQrDr
cos)cos()sin(
sin)sin()cos(**
**
(5.7)
Siendo )sin( re rm θωψα ⋅⋅−= ; )cos( re rm θωψβ ⋅⋅=

CAPÍTULO 5.
85
Derivando la expresión 5.7 se puede demostrar que se llega a las expresiones mostradas en 5.8 a 5.11, donde se definen tensiones en alta frecuencia, relativas a la frecuencia de inyección, y tensiones de baja frecuencia, pertenecientes a la frecuencia de giro del motor, que se generan a la entrada del motor.
αα θωθωθωθω eLsiLsiLsiLsiv rrrrrrrrLF DDQQ +⋅∆⋅⋅+⋅⋅⋅−⋅∆⋅⋅−⋅⋅⋅−= )sin()sin()cos()cos(****
(5.8)
ββ θωθωθωθω eLsiLsiLsiLsiv rrrrrrrrLF DDQQ +⋅∆⋅⋅−⋅⋅⋅+⋅∆⋅⋅−⋅⋅⋅−= )cos()cos()sin()sin(****
(5.9)
[ ])2cos()2cos(2)cos( tLstLstLsAv iriirriiHF ωθωωθωωωα −⋅∆⋅−−⋅∆⋅⋅+⋅⋅⋅−= (5.10)
[ ])2sin()2sin(2)sin( tLstLstLsAv iriirriiHF ωθωωθωωωβ −⋅∆⋅−⋅−⋅∆⋅⋅+⋅⋅⋅−= (5.11)
El ángulo estimado es extraído de las ecuaciones 5.10 y 5.11, que coinciden con las mostradas en 4.38 si despreciamos el término que depende de la velocidad angular del motor, por ser mucho menor que la frecuencia de inyección. La estimación obtenida de estas expresiones es introducida, de nuevo al sistema, en las expresiones 5.8 y 5.9, mediante la estimación. Al no existir error de estimación, no se observa ninguna componente frecuencial que pudiera estar dentro de la banda de paso del filtro pasa banda, por lo que la estimación sigue siendo válida.
Se puede suponer ahora que el valor del ángulo estimado no es igual al ángulo real realimentado de la máquina, es decir que existe un error asociado al procesado:
esrrrr e+=→≠ θθθθ ˆˆ (5.12)
Se puede demostrar que operando de nuevo las ecuaciones anteriores, incluyendo el error de estimación definido en 5.12, se obtienen nuevas expresiones para las tensiones de baja frecuencia. Estas expresiones son 5.13 y 5.14, que substituyen a las mostradas en 5.8 y 5.9. Notar que a priori, las expresiones 5.10 y 5.11 no se alteran con el posible error de estimación producido por el procesado de señal.
LFvα = )cos()cos()cos(***
esrQes
esrQresrQr eLsidt
deeLsieLsi +⋅⋅⋅−−⋅∆⋅⋅−+⋅⋅⋅− θθωθω
αθ eeLsidt
deesrQ +−⋅∆⋅⋅+ )cos(
* (5.13)

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
86
)sin()sin()sin(***
esres
esrresrrLF eLsidt
deeLsieLsiv QQQ +⋅⋅⋅−−⋅∆⋅⋅++⋅⋅⋅−= θθωθωβ
βθ eeLsidt
deesr
es
Q +−⋅∆⋅⋅+ )sin(* (5.14)
Observando las expresiones obtenidas en 5.13 y 5.14, se observa que aparecen términos en tensión que dependen de la derivada del error de la estimación. Esto perjudica la calidad de la estimación, pues si estos términos tienen componentes de frecuencias que puedan estar dentro de la banda de paso del filtro paso-banda ubicado a la entrada del estimador, acabará corrompiendo la estimación. Se ha observado mediante simulación como este efecto acaba provocando una realimentación positiva en la estimación, debido a que un error en la estimación inicial provoca una señal de error que vuelve a introducirse en el estimador, haciendo que después de un tiempo finito, el sistema no esté sincronizado correctamente con la posición real de rotor, perdiendo el régimen deslizante, y consecuentemente la señales de posición.
5.2.1 Sistema para la compensación del error en alta frecuencia.
Se puede modificar la estructura del estimador actual, la cual estaba basada en una estructura donde el procesado de señal daba la información de ángulo, con posible error de estimación, por el que se muestra más abajo, en la figura 5-2, donde se pretende corregir dichos errores mediante la inclusión de variables conocidas del sistema.
Figura 5-2. Sistema Sensorless Propuesto con Señales de Corrección de Error en HF
Debe notarse que la transformada de dq a αβ es la misma que se utiliza en el esquema principal del control del sistema mostrado en 5-1. Se analiza por tanto la expresión de la estimación, teniendo en cuenta que ésta tiene un error asociado.

CAPÍTULO 5.
87
Suponemos en todo momento que el sistema desliza, por tanto ** ˆ;ˆQQDD iiii ==
Por un lado las tensiones que pasan del sistema por el filtro pasa-banda serán las propias de la expresión 5.10 y 5.11, más los términos que pudieran estar dentro de la banda de paso de la expresión 5.13 y 5.14, los cuales son los dependientes de la derivada del error. La expresión a la salida de los sumadores asociados al esquema 5-2 será:
[ ]
evLsidt
de
tLstLstLsAe
rBPQBPes
iriirriia
_)ˆcos(
)2cos()2cos(2)cos(
_ αθ
ωθωωθωωω
−⋅⋅⋅−
⋅−⋅⋅∆⋅−⋅−⋅⋅∆⋅⋅+⋅⋅⋅⋅−=
(5.15)
[ ]
evLsidt
de
tLstLstLsAe
rBPQBPes
iriirriib
_)ˆsin(
)2sin()2sin(2)sin(
_ βθ
ωθωωθωωω
−⋅⋅⋅−
⋅−⋅⋅∆⋅−⋅−⋅⋅∆⋅⋅+⋅⋅⋅⋅−=
(5.16)
En 5.15 y 5.16, se añaden las expresiones que contienen la información de posición. Se incluye el término de mayor peso de los que aparecen en la expresiones 5.13 y 5.14 que dependen de la derivada del error, después de pasar por el filtro pasa-banda, de ahí su notación BP, es decir, se desprecia el término dependiente de SL∆ por ser de pequeño valor respecto a SL . Por último se añaden
los términos de corrección denominados ev _α y ev _β .
Por otro lado, sabemos que, a la salida de la transformada dq tenemos la
estimación de las corrientes mediante el ángulo estimado. Siendo 0=∗
Di .
⋅
−=
*
*
)ˆcos()ˆsin(
)ˆsin()ˆcos(
ˆ
ˆ
Q
D
rr
rr
i
i
i
i
θθ
θθ
β
α
(5.17)
*)ˆsin(ˆ
Qr ii ⋅−= θα (5.18) *
)ˆcos(ˆQr ii ⋅= θβ (5.19)
Las expresiones 5.18 y 5.19 son filtradas por el mismo filtro pasa-banda utilizado en el estimador, dando como resultado los términos con notación BP de 5.20 y 5.21.
[ ]BPQrBP ii *
)ˆsin(_ ⋅−= θα (5.20)
[ ]BPQrBP ii *
)ˆcos(_ ⋅= θβ (5.21)

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
88
Para el sistema de alta frecuencia utilizado en el diagrama de la figura 5-2, se emplea una versión simplificada definida en 5.22.
⋅
≈
β
α
β
α
i
i
dt
d
Ls
Ls
v
v
0
0
(5.22)
Se introducen las corrientes definidas en 5.20 y 5.21 en el modelo simplificado del motor, y se deriva para poder obtener las expresiones a la salida de este bloque, esto es ev _α y ev _β , teniendo en cuenta que aproximamos
diq/dt = 0.
)ˆcos(ˆ
_*
_ rBPQr
Lsidt
dev θ
θα ⋅⋅⋅−= (5.23)
)ˆsin(ˆ
_*
_ rBPQr
Lsidt
dev θ
θα ⋅⋅⋅−= (5.24)
Podemos volver a escribir 5.15 y 5.16, reemplazando los términos ev _α y
ev _β por el resultado obtenido en 5.23 y 5.24, resultando las expresiones 5.25 y
5.26.
[ ])2cos()2cos(2)cos( tLstLstLsAe iriirriia ⋅−⋅∆⋅+⋅−⋅∆⋅⋅+⋅⋅⋅⋅= ωθωωθωωω
)ˆcos(ˆ
)ˆcos(*
__ rBPQr
rBPQBPes Lsi
dt
dLsi
dt
deθ
θθ ⋅⋅⋅+⋅⋅⋅− (5.25)
[ ])2sin()2sin(2)sin( tLstLstLsAe iriirriib ⋅−⋅∆⋅+⋅−⋅∆⋅⋅+⋅⋅⋅⋅= ωθωωθωωω
)ˆsin(ˆ
)ˆsin(*
__ rBPQr
rBPQBPes Lsi
dt
dLsi
dt
deθ
θθ ⋅⋅⋅+⋅⋅⋅− (5.26)
Podemos de nuevo redefinir la expresión de la estimación de ángulo como se propone en 5.12, y substituimos en 5.25 y 5.26.
[ ]
)ˆcos()ˆcos()ˆcos(
)2cos()2cos(2)cos(
*__
*_ rBPQ
esBPrBPQ
rrBPQ
BPes
iriireiia
Lsidt
deLsi
dt
dLsi
dt
de
tLstLstLsAe
θθθ
θ
ωθωωθωωω
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅−
⋅−⋅∆⋅+⋅−⋅∆⋅⋅+⋅⋅⋅⋅=
(5.27)

CAPÍTULO 5.
89
[ ]
)ˆsin()ˆsin(ˆ
)ˆsin(
)2sin()2sin(2)sin(
*
_
*
_
*
_ rBPQesBP
rBPQr
rBPQesBP
iriireiib
Lsidt
deLsi
dt
dLsi
dt
de
tLstLstLsAe
θθθ
θ
ωθωωθωωω
⋅⋅⋅+⋅⋅⋅+⋅⋅⋅−
⋅−⋅∆⋅+⋅−⋅∆⋅⋅+⋅⋅⋅⋅=
(5.28)
Al separar el término de la estimación y substituirlo por la suma del ángulo
real más un error, nos quedan dos términos dependientes de la derivada de la
estimación, de frecuencia indeterminada pero de igual amplitud y fase, por lo que
se anulan. Además nos queda un término de derivada del ángulo real, de
frecuencia conocida (sin ningún tipo de ruido) y el cual podemos afirmar que sus
componentes dentro del filtro pasa-banda son nulas. Por tanto queda:
[ ])2cos()2cos(2)cos( tLstLstLsAe iriirriia ⋅−⋅∆⋅+⋅−⋅∆⋅⋅+⋅⋅⋅⋅= ωθωωθωωω (5.29)
[ ])2sin()2sin(2)sin( tLstLstLsAe iriirriib ⋅−⋅∆⋅+⋅−⋅∆⋅⋅+⋅⋅⋅⋅= ωθωωθωωω (5.30)
Tras pasar por el procesado de señal (SP), que está especialmente pensado
para extraer las señales de posición de la estructura formada por las expresiones
5.29 y 5.30 obtenemos a la salida las señales siguientes.
)2cos(' riaa LsASPee θω ⋅∆⋅⋅=⋅= (5.31)
)2sin(' ribb LsASPee θω ⋅∆⋅⋅=⋅= (5.32)
La estimación de posición se extrae de 5.33 y la velocidad de 5.34.
)2cos(
)2sin(tan
2
1
'
'tan
2
1ˆ 11
r
r
a
br
e
e
θ
θθ ⋅=⋅= −− (5.33)
pdt
d rm
rr
ωω
θω
ˆˆ;
ˆˆ ==
(5.34)
Se demuestra que la estimación es igual al ángulo real, donde se han
corregido los posibles errores de estimación que se encuentran dentro del filtro
pasa-banda. Notar que tanto el error de baja frecuencia como el de muy alta
frecuencia no pueden ser compensados por este sistema, siendo solo compensadas
las componentes que entran dentro del filtrado, siendo éstas las que precisamente
perjudican la estimación.

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
90
Las simulaciones que se muestran a continuación muestran el resultado del
sistema con controladores deslizantes en corriente, y lazo externo de velocidad,
coincidiendo con el esquema de control de la figura 5-1 y 5-2. El sistema trabaja en
modo sensorless, utilizando las estimaciones en las transformadas y lazos de
control.

CAPÍTULO 5.
91
Simulación Caso 2.
ARRANQUE A VELOCIDAD NOMINAL CON VARIACIÓN DE PAR
Simulación 5.1. Ángulo eléctrico estimado (verde) y real (azul).
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
-10
0
10
20
Tiempo (s)
Error de Ángulo (º)
Simulación 5.2. Error de ángulo
En las figuras 5.1 y 5.2 se observa como el error de estimación es
considerables trabajando en las condiciones definidas en el caso 2. Esto es
esperable pues, a la velocidad nominal de la máquina, y con el par aplicado, es más
complejo evitar que armónicos propios del control se introduzcan en el filtro pasa
banda del procesado. Es evidente que a pesar de seguir funcionando, la
degradación de estimación es importante.

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
92
Tensión (V)
Simulación 5.3 Señales de Posición Extraídas del control Equivalente y el Procesado
Simulación 5.4. Velocidad Angular de Referencia (azul), Estimada (rojo) y Real (verde)
Simulación Caso 3.
INVERSIÓN DE GIRO AL 1% DE VELOCIDAD LA NOMINAL Y PAR NOMINAL
Ángulo (º)
Simulación 5.5. Ángulo eléctrico estimado (verde) y real (azul).

CAPÍTULO 5.
93
Simulación 5.6. Error de Estimación
Simulación 5.7 Señales de Posición Extraídas del control Equivalente y el Procesado
Velocidad Angular (rad/s)
Simulación 5.8. Velocidad Angular de Referencia (azul), Estimada (ojo) y Real (verde)

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
94
Notar que las simulaciones incluyen el transitorio de arranque del sistema,
con el par nominal aplicado, según está definido en el caso 3. En las simulaciones
5.5 ,5.6 y 5.7 se observa como el error de estimación tiende a valores muy
reducidos.
Simulación Caso 4.
VARIACIÓN DE PAR DE 0 A NOMINAL CON REFERENCIA DE VELOCIDAD NULA
Ángulo (º)
Simulación 5.9. Ángulo eléctrico estimado (verde) y real (azul).
Simulación 5.10. Error de Estimación de Ángulo Eléctrico.
Las figuras de simulación 5.9 ,5.10 y 5.11 muestran la estimación de posición
de rotor, el error cometido, y las señales de posición obtenidas del procesado. Se
vuelve a observar como la estimación es realmente exacta cuando las velocidades
del motor son reducidas y en este caso se encuentra parado, incluso con

CAPÍTULO 5.
95
variaciones bruscas en el par de carga. El error tiendo a valores prácticamente
nulos y no alcanza ni los 5 grados eléctricos en los transitorios de carga.
Tensión (V)
Simulación 5.11 Señales de Posición Extraídas del control Equivalente y el Procesado.
Velocidad Angular (rad/s)
Simulación 5.12. Velocidad Angular Estimada (verde) y Real (azul).
La figura de simulación 5.12 muestra la estimación de velocidad, la cual
tiene un pequeño retardo de fase en los transitorios debido al filtrado paso bajo
necesario después del cálculo a partir de la estimación de posición con una acción
derivativa.

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
96
5.3. SISTEMA SENSORLESS MEDIANTE INYECCIÓN DE FRECUENCIA EN
CORRIENTE Y PROCESADO DE SEÑAL. CONTROL DE POSICIÓN.
La gran ventaja de los sistemas de estimación basados en inyección de
frecuencia es la independencia inherente de la velocidad de giro del motor. Según
como se presentó en el capítulo 4, y como posteriormente se desarrollará, se
pueden utilizar observadores que funcionan de manera satisfactoria sin la
necesidad de inyectar señales de prueba al motor. Por ello, la importancia del
sistema propuesto anteriormente es importante sobre todo en modos de
funcionamiento que impliquen velocidades muy bajas del motor, o un eventual
control de posición de la máquina. En consecuencia, en este capítulo se introduce
un lazo de control de posición al esquema propuesto en 5.2, para demostrar la
validez del método de inyección utilizado. El sistema de control propuesto se
muestra en la figura 5.3.
Figura 5-3 Sistema propuesto para control de Posición
Para el controlador se utiliza una acción proporcional simple, aceptando un
pequeño error estacionario respecto la referencia. Es importante acondicionar la
señal estimada de posición antes de introducirla en el lazo de realimentación,
básicamente se necesita tener en cuenta el número de par de polos de la máquina,
ya que la posición del flujo magnético difiere de la posición real del rotor en
función del número de par de polos de la máquina. Desde el punto de vista del

CAPÍTULO 5.
97
impacto del uso de este lazo a la estimación basada en el control equivalente, es
evidente que no producirá ninguna variación, pues simplemente se genera la
velocidad de referencia para el lazo siguiente. El controlador PI de velocidad si
influye en los controladores sliding, y debe ser diseñado para que atenúe
fuertemente las señales que se encuentren en el ancho de banda de la inyección de
las perturbaciones.
SIMULACIÓN CASO 5.
CONTROL DE POSICIÓN Y VARIACIÓN DE PAR
Simulación 5.13. Consigna de Posición (azul), Ángulo mecánico real (verde) y estimado (rojo).
Ángulo(rad)
Simulación 5.14. Ángulo eléctrico real (azul) y estimado (verde).
En la figura 5.13 se muestra como el sistema de control de posición funciona
correctamente, utilizando como referencia la posición de rotor estimada. De igual

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
98
forma, el ángulo eléctrico real y estimado son prácticamente iguales incluso en los
transitorios, como se puede comprobar en el error de estimación que se observa en
5.15. Las señales de posición del procesado aparecen en 5.16. La variación de par es
aplicado en el instante 0.75 s, observándose en todas las gráficas la reacción del
sistema en ese punto, incluyendo la velocidad mecánica real y estimada del motor,
en 5.17.
Simulación 5.15. Error Eléctrico de Estimación
Simulación 5.16. Señales de Posición Extraídas del control Equivalente y el Procesado.

CAPÍTULO 5.
99
Velocidad Angular (rad/s)
Simulación 5.17. Velocidad Angular Real (azul) y Estimada (verde).
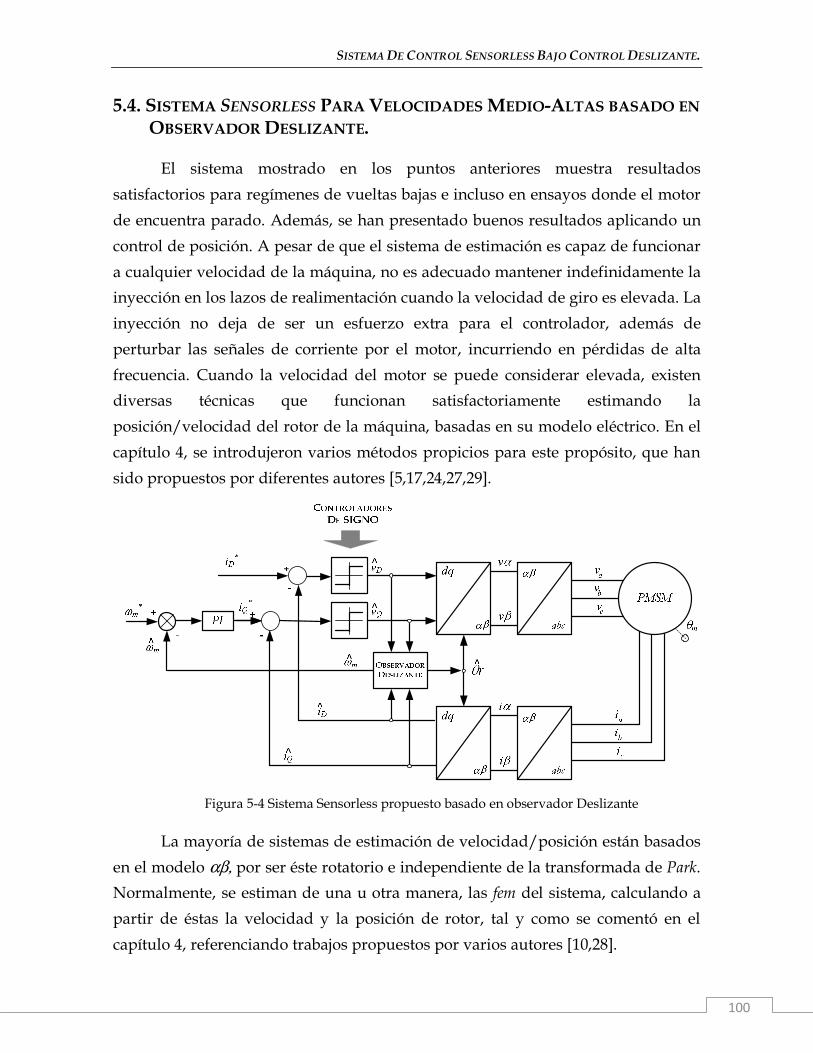
SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
100
5.4. SISTEMA SENSORLESS PARA VELOCIDADES MEDIO-ALTAS BASADO EN
OBSERVADOR DESLIZANTE.
El sistema mostrado en los puntos anteriores muestra resultados
satisfactorios para regímenes de vueltas bajas e incluso en ensayos donde el motor
de encuentra parado. Además, se han presentado buenos resultados aplicando un
control de posición. A pesar de que el sistema de estimación es capaz de funcionar
a cualquier velocidad de la máquina, no es adecuado mantener indefinidamente la
inyección en los lazos de realimentación cuando la velocidad de giro es elevada. La
inyección no deja de ser un esfuerzo extra para el controlador, además de
perturbar las señales de corriente por el motor, incurriendo en pérdidas de alta
frecuencia. Cuando la velocidad del motor se puede considerar elevada, existen
diversas técnicas que funcionan satisfactoriamente estimando la
posición/velocidad del rotor de la máquina, basadas en su modelo eléctrico. En el
capítulo 4, se introdujeron varios métodos propicios para este propósito, que han
sido propuestos por diferentes autores [5,17,24,27,29].
Figura 5-4 Sistema Sensorless propuesto basado en observador Deslizante
La mayoría de sistemas de estimación de velocidad/posición están basados
en el modelo αβ, por ser éste rotatorio e independiente de la transformada de Park.
Normalmente, se estiman de una u otra manera, las fem del sistema, calculando a
partir de éstas la velocidad y la posición de rotor, tal y como se comentó en el
capítulo 4, referenciando trabajos propuestos por varios autores [10,28].

CAPÍTULO 5.
101
En este capítulo se presenta un observador en modo deslizante basado en el
sistema dq que permite la estimación de posición/velocidad, sin la necesidad de
inyección. La estructura está diseñada de una manera análoga a la propuesta en el
observador del subapartado 4.1.1 para las corrientes en αβ. Las ecuaciones
eléctricas que definen el motor en el sistema de referencia dq se muestran en las
ecuaciones 5.35 y 5.36.
QQrDSDD
D iLirvdt
idL ˆˆˆ
ˆ⋅⋅+⋅−=⋅ ω (5.35)
)(ˆˆˆˆ
DDmrQSQQ
Q iLirvdt
idL +⋅−⋅−= ψω (5.36)
Se pretende diseñar un observador de las corrientes en dq, y mediante un
control deslizante se garantiza la convergencia del observador. El control
equivalente del observador contendrá la información de interés. Se pueden diseñar
sendos observadores para las corrientes en dq, y extraer los términos dependientes
de la velocidad. Las expresiones 5.37 y 5.38 muestran los observadores para las
corrientes en dq.
−⋅+⋅−=⋅ DDDsD
DD iisignKirv
dt
idL ˆˆˆ
ˆ
ˆ
(5.37)
−⋅−⋅−=⋅ QQQsQ
QQ iisignKirv
dt
idL ˆˆˆ
ˆ
ˆ
(5.38)
Si substraemos las expresiones de los observadores 5.37 y 5.38 de 5.35 y 5.36
obtenemos la expresión de estado del observador en el sistema de errores.
[ ]DQQrDsD
D isignKiLirdt
idL ⋅−⋅⋅+⋅−=⋅ ω (5.39)
[ ]QDDmrQsQ
Q isignKiLirdt
idL ⋅++⋅−⋅−=⋅ )(ψω (5.40)
Donde DDD iii ˆˆ
−= e QQQ iii ˆˆ−= . Si se prueba la convergencia del sistema,
mediante la variable K tal que ( ))(,max DDmrQQr iLiLK +⋅⋅⋅> ψωω , el control
equivalente debidamente filtrado dará la estimación en las ecuaciones 5.41 y 5.42.

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
102
El régimen deslizante se alcanzará después de un tiempo finito, y se logrará 0=Di y 0=Qi .
eqD
r
iL
isignK
⋅
⋅=ω (5.41)
[ ])(
ˆDDm
eqQ
r
iL
isignK
+
⋅=
ψω (5.42)
De las expresiones obtenidas en 5.41 y 5.42, se desprende una diferencia
substancial a la hora de calcular la velocidad. El denominador de la expresión 5.41
depende del producto de la inductancia de estator, definida como siempre
positiva, y de la corriente en q la cual no se puede definir como tal, pudiendo tener
cambios de signos. En tiempo continuo por tanto tendremos pasos por cero, lo que
hace que el denominador pueda ser cero, dando un resultado indeterminado. De
manera contraria, el denominador expresión 5.42, queda definida siempre
diferente de cero si se cumple:
DDm iL ⋅−≠ψ (5.43)
De hecho, la expresión de denominador de 5.42 no es más que el flujo
magnético alineado a la componente de corriente en d, siendo mψ el flujo
permanente del imán, el cual es constante y diferente de cero, y el flujo generado
por la corriente en d. Este último flujo es precisamente fijado a cero por control,
para precisamente no contrarrestar el efecto del imán, por lo que la expresión de
5.43 siempre se cumplirá bajo las premisas del control propuesto.
Para las transformadas en dq es necesario conocer la posición de rotor en
cada momento para poder realizar las transformaciones necesarias desde las
expresiones en αβ. De nuevo, podemos relacionar la posición de rotor
directamente con una variable del estimador propuesto anteriormente, como se
define en 5.44.
rr ωθ ˆˆ =& (5.44)
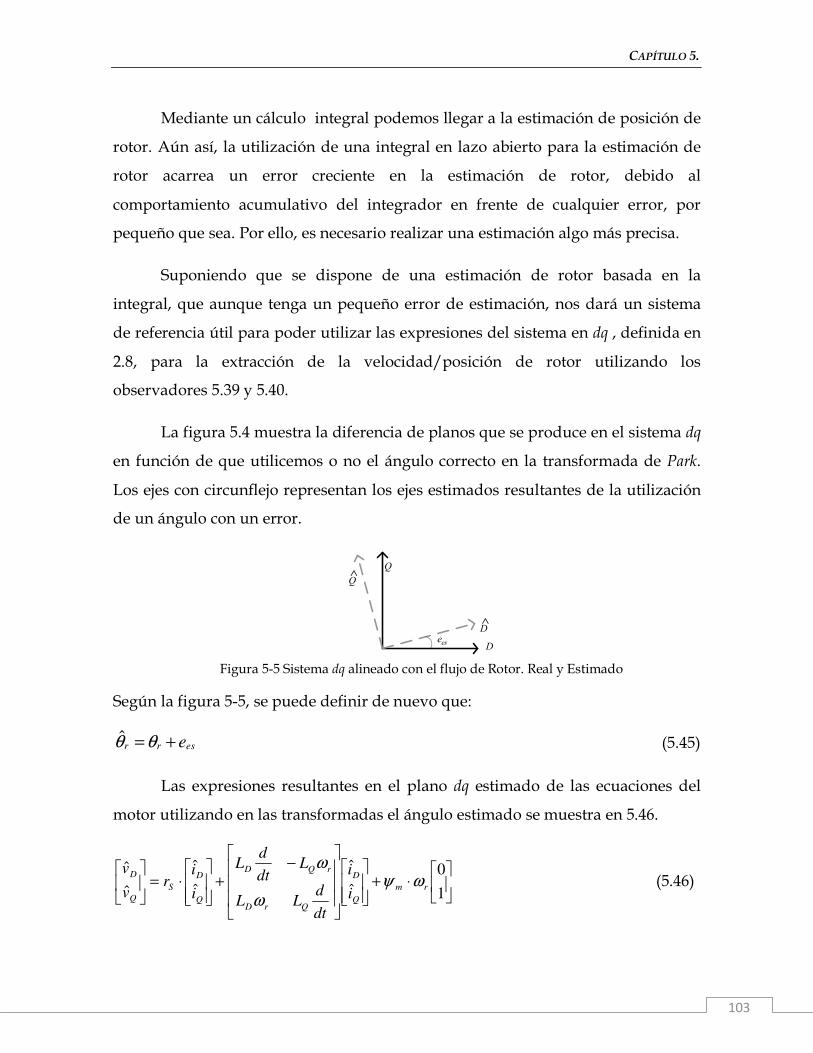
CAPÍTULO 5.
103
Mediante un cálculo integral podemos llegar a la estimación de posición de
rotor. Aún así, la utilización de una integral en lazo abierto para la estimación de
rotor acarrea un error creciente en la estimación de rotor, debido al
comportamiento acumulativo del integrador en frente de cualquier error, por
pequeño que sea. Por ello, es necesario realizar una estimación algo más precisa.
Suponiendo que se dispone de una estimación de rotor basada en la
integral, que aunque tenga un pequeño error de estimación, nos dará un sistema
de referencia útil para poder utilizar las expresiones del sistema en dq , definida en
2.8, para la extracción de la velocidad/posición de rotor utilizando los
observadores 5.39 y 5.40.
La figura 5.4 muestra la diferencia de planos que se produce en el sistema dq
en función de que utilicemos o no el ángulo correcto en la transformada de Park.
Los ejes con circunflejo representan los ejes estimados resultantes de la utilización
de un ángulo con un error.
D
Q
Q
Dees
Figura 5-5 Sistema dq alineado con el flujo de Rotor. Real y Estimado
Según la figura 5-5, se puede definir de nuevo que:
esrr e+=θθ (5.45)
Las expresiones resultantes en el plano dq estimado de las ecuaciones del
motor utilizando en las transformadas el ángulo estimado se muestra en 5.46.
⋅+
−
+
⋅=
1
0
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
rm
Q
D
QrD
rQD
Q
D
S
Q
D
i
i
dt
dLL
Ldt
dL
i
ir
v
vωψ
ω
ω (5.46)

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
104
La expresión 5.46 es el resultado de la transformación de Park, con el ángulo estimado, por tanto, podemos decir que:
[ ]
−
−⋅⋅+
⋅⋅
⋅+⋅=
)cos(
)sin(
ˆ
ˆ
ˆ
ˆ
r
r
rm
Q
DT
s
Q
D
i
iM
dt
dLrM
v
v
θ
θωψθθθ (5.47)
Siendo:
( )( )
∆+∆
∆∆−=
)2cos(2sin
)2sin(2cos
rr
rr
sLsLsL
sLsLsLL
θθθθ
θ ; ( ) ( )( ) ( )
−=
rr
rrMθθ
θθθ ˆˆ
ˆˆ
cossin
sincos
De la expresión 5.47, donde se ha incluido el sistema en αβ, si se asume que
rr θθ =ˆ , se llega de nuevo a la expresión 5.46, y en función de si se utiliza el
modelo con saliency o no, los valores de las inductancias son iguales (si es un motor
de imán superficial), o diferentes (si es un motor de imanes interiores). En cambio,
si suponemos que no son iguales, llegamos al sistema 5.48.
−∆−⋅+
−⋅+
−
+
=
D
Q
srr
es
es
rm
Q
D
QrD
rQD
Q
D
S
Q
D
i
iL
e
e
i
i
dt
dLL
Ldt
dL
i
ir
v
v
ˆ
ˆ))(ˆ(2
)cos(
)sin(
ˆ
ˆ
ˆ
ˆ
ˆ
ˆωωωψ
ω
ω(5.48)
La expresión 5.48 nos indica que, si se utiliza una estimación de ángulo
errónea para sincronizar el sistema de referencia a la posición de rotor real, esto se
manifiesta con la aparición de dos nuevos términos, asociados al error de
estimación. Por un lado, tenemos un término proporcional a la velocidad de giro y
al flujo del imán permanente. Por otro, un término asociado a la saliency del motor,
y al error de estimación de velocidad, que no deja de ser la derivada del error de
posición.
Si el motor es de imán superficial, este término queda anulado, de igual
forma que si la estimación de velocidad utilizada contenga muy poco error. La
estimación de velocidad se hace a partir del observador propuesto en 5.40, que está
basado a la dinámica asociado al plano q. En este observador (5.40), el término de
error de velocidad queda multiplicado por la corriente en d , la cual es fijada a cero

CAPÍTULO 5.
105
por el controlador deslizante principal, por lo que el término dependiente del error
de velocidad queda anulado y no afecta al correcto funcionamiento del observador
5.40. Con una estimación de velocidad correcta, el término asociado a la derivada
del error puede ser también despreciado en el plano d.
Por otro lado, en condiciones en las que el error sea pequeño, el término
senoidal que aparece en la tensión en d estará muy cerca de 0, y el valor coseno que
aparece en la tensión en q estará muy cercano a la unidad. Según los límites
calculados en 5.49, se puede asumir que siempre y cuando el error de estimación
sea pequeño, el término que aparece en d es directamente proporcional al error de
estimación, haciendo la expresión 5.40 igualmente válida para la estimación inicial de velocidad y posición a pesar de un posible error en el ángulo de las transformadas.
−⋅⋅=
⋅⋅
→ 0)sin(
)cos(
)sin()sin(
0
es
esrm
es
es
esrm
e
ee
e
eelim
es
ωψωψ (5.49)
Acorde a 5.49, se puede rediseñar el estimador mostrado en 5.39, por tal de
poder extraer la información de error mediante el controlador deslizante,
utilizando las propiedades del control equivalente. La expresión 5.50 expresa la
tensión en d del plano estimado con el término de error theta asociado. El
observador permitirá la identificación del error mediante filtrado paso bajo, acorde
a 5.52.
esrmQrQD
DDSD eiLdt
idLirv ⋅⋅−⋅⋅−+⋅= ωψω ˆ
ˆˆˆ (5.50)
−⋅+⋅⋅−⋅−=⋅ DDQrQDsD
DD iisignKiLirv
dt
idL ˆˆˆˆ
ˆ
ω (5.51)
[ ] eseesrmeq
D ekeisignK ⋅=⋅⋅−=⋅ ωψ (5.52)
Mediante la extracción del error cometido en el ángulo utilizado en las
transformadas a partir de la expresión 5.52, se puede utilizar dicho error para el

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
106
diseño de un observador que converja al ángulo correcto. El observador completo
propuesto para este fin se muestra en la 5.6
Se muestra la estructura resultante de los observadores 5.40 y 5.52, junto con
un lazo de control lineal para corregir el error de ángulo cometido por el término
integral. El ángulo inicial estimado del observador 5.40 se integra y se añade como
un término feed-forward, siendo el ángulo inicial estimado. Gracias a la extracción
del error se puede corregir la estimación, utilizando un controlador lineal. Notar
que el error estimado queda modulado por la velocidad eléctrica, por lo que este
error no puede ser calculado a velocidad 0, con el actual sistema. Siendo aquí
necesario activar la inyección propuesta en 5.3.
i
v
i
+-
^r
+
-+
-
s
1
i
D
- LQ1
rsQ
Q
+
- +
-
s
1
K
i
Q
+ L1
rs
v
D
D
D
LPF
LPF
+
+
/
m
LD
K
+
+
LQ
iQ x
m^
1
s
Gc+
-
0
Figura 5-6 Estructura para la estimación de Posición y velocidad.

CAPÍTULO 5.
107
SIMULACIÓN CASO 1.
INVERSIÓN DE GIRO A VELOCIDAD Y PAR NOMINAL
Se ensaya el observador de velocidad y ángulo propuesto en la figura 5-4, 5-
6 bajo el régimen de funcionamiento definido en el caso 1 de simulación. En este
caso se pretende comprobar como este sistema se degrada al trabajar cerca de
velocidades nulas del motor. La simulación 5.18 muestra como la corrección de
ángulo se degrada a medida que la velocidad se hace pequeña, concretamente en la
inmediaciones de la inversión de giro. En 5.19 y 5.20 sin embargo, se observa el
buen comportamiento de los observadores en modo deslizamiento propuestos
mediante las ecuaciones 5.40 y 5.65.
Simulación 5.18. Ángulo real (azul) y Estimado (verde)
Velocidad Angular (rad/s)
Simulación 5.19. Velocidad real (azul) y estimada (verde) extraída del observador 5.40 filtrando paso-bajo

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
108
.
Simulación 5.20. Error de Ángulo (azul) y Estimación del Error (verde) extraído del observador 5.65 filtrando paso-bajo
.
SIMULACIÓN CASO 2.
ARRANQUE A VELOCIDAD NOMINAL CON VARIACIÓN DE PAR
Se ensaya el mismo observador de la figura 5-4, 5-6 bajo el caso de
simulación 2. En este caso, al no producirse la inversión de giro, el sistema se
comporta mejor, pues trabaja siempre en condiciones óptimas para su buen
funcionamiento, esto es a velocidades altas, donde el estimador de error del
sistema tiene más ganancia, acorde a 5.62. En 5.21 se muestra la correcta estimación
de velocidad.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-100
0
100
200
300
400
Tiempo (s)
Velocidad Angular (rad/s)
Simulación 5.21 Velocidad real (azul) y estimada (verde) extraída del observador 5.40

CAPÍTULO 5.
109
En la simulación 5.22 se observa el ángulo real y el estimado por el
observador. Se nota como las condiciones iniciales del motor real y el estimador de
ángulo han sido modificadas con el objetivo de observar como el lazo de control
lineal corrige esta diferencia. En la simulación 5.23 se muestra como el error y la
estimación de éste ( invertido para mayor claridad) tiende a cero después de los
transitorios.
Ángulo (rad)
Simulación 5.22. Ángulo real (azul) y estimado (verde)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.8
-0.6
-0.4
-0.2
0
0.2
Tiempo (s)
Error de Ángulo (rad)
Simulación 5.23. Error de Estimación de Ángulo (azul) y Estimación del Error Mediante Observador 5.61 (verde)
Por último se muestra un detalle de la convergencia de la estimación de
ángulo en el arranque en 5.24, y como la acción de control tiende a compensar el
error real del sistema en la figura 5.25.

SISTEMA DE CONTROL SENSORLESS BAJO CONTROL DESLIZANTE.
110
Ángulo(rad)
Simulación 5.24 Velocidad real (azul) y estimada (verde). Detalle de la convergencia del controlador propuesto en 5-4, 5-6.
Error de Ángulo (º)
Simulación 5.25 Error de Estimación (azul) y acción de Control (verde) del controlador propuesto en 5-4, 5-6.

112
CAPÍTULO 6. 6.1 CONCLUSIONES.
Los estudios realizados y recogidos en el presente trabajo han reflejado el
trabajo de casi dos años, el cual ha consistido en el estudio de bibliografía básica, la
lectura de diversos artículos, el diseño de varios esquemas de control sobre el
PMSM, y de técnicas de estimación de sus variables, así como su validación
mediante simulación. El estudio del control de la máquina mediante métodos
diferentes de los utilizados hasta ahora, como son el FOC o DTC, y la aplicación de
técnicas de estimación de posición/velocidad han centrado la mayor parte del
trabajo, siendo los objetivos principales de la investigación.
Por un lado, se han empleado técnicas de control no lineal derivadas de los
principios de estabilidad formulados por Lyapunov, concretamente la teoría del
control en modo deslizamiento, para el control de la máquina en estructuras
diferentes al FOC, basado en control lineal, y al DTC, basado en tablas de
conmutación pre-definidas. El análisis matemático efectuado demuestra la validez
de dos esquemas basados en diferentes superficies de deslizamiento que hacen el
sistema controlable. Es importante resaltar el análisis donde se desarrolla el control
en modo deslizamiento debido a que no requiere una linealización del motor.
Los controladores en modo deslizamiento propuestos han sido
desarrollados analíticamente y simulados con Matlab Simulink. Los resultados de
simulación, mostrados en el capítulo 3, confirman la validez de los sistemas, y se
confirman como controles alternativos a los utilizados hasta el momento. El uso
del control deslizante aporta ventajas inherentes al control del motor, como la
robustez, la reducción del orden del sistema y una dinámica más rápida de los
controladores. De igual forma, aparecen sus desventajas, como es la frecuencia
variable de operación o los rizados asociados a la conmutación.
Una vez se ha obtenido un control del sistema mediante técnicas de control
deslizantes, se ha planteado el segundo objetivo en la investigación, la estimación
de ángulo/velocidad de cara al funcionamiento de un sistema sensorless. Las
ventajas de poder trabajar sin sensor son obvias, y han sido ya comentadas,
además estos algoritmos pueden ser utilizados como sistemas redundantes de
monitorización de la planta, sin prescindir del sensor físico.
CAPÍTULO 6.
113
Se ha planteado el problema de por que no funcionaban las técnicas de
inyección de portadora de tensión en los esquemas DTC o SMC, y se ha observado
como el ancho de banda de los controladores hace que la estimación no sea posible,
debido a las cancelaciones naturales de las inyecciones por el sistema, las cuales no
se producen en el esquema FOC. Con la misma teoría de actuación del control, se
han redefinido nuevos esquemas de inyección en otros puntos del sistema,
concretamente en los lazos de realimentación de corriente, con los cuales
teóricamente es posible extraer información de la planta. En el capítulo 4 se
proponen dos esquemas que permiten estimación de posición/velocidad,
mediante el teorema del control equivalente y son de igual forma validados por
simulación.
En el último capítulo se muestra la aplicación de uno de los esquemas de
estimación mostrado en el capítulo 4 para un eventual control sensorless, y como ha
sido necesario la modificación del estimador para poder operar en modo sensorless,
incluyendo éste una compensación de error de alta frecuencia. Simulando, se
obtienen buenos resultados utilizando las estimaciones en las propias
transformadas y lazos de realimentación del control. Por último se estudia y
desarrolla un sistema basado en un observador deslizante trabajando en el plano
dq, para el empleo en condiciones de velocidad alta del motor, donde la inyección
ya no es necesaria y es mejor no utilizarla.
Una parte del presente proyecto, concretamente lo desarrollado en los
puntos 4.3 y 4.4, ha sido presentado en dos congresos diferentes:
1 Repecho, V.; Biel, D.; Arias, A.; Guinjoan, F.; “Angle estimation using high
frequency injection for sliding mode controlled permanent magnet
synchronous machines drives“. 7th International Conference-Workshop
Compatibility and Power Electronics (CPE), 2011. Identificador Digital:
10.1109/CPE.2011.5942225 . Página(s): 161 – 16.
2 Repecho, V.; Biel, D.; Arias, A.; Guinjoan, F.; “Estimación de Posición en un
Motor Síncrono de Imanes Permanentes Mediante Técnicas de Inyección de
Alta Frecuencia Con Control Deslizante “. Seminario Anual de Automática y
Electrónica Industrial (SAAEI), 2011. Página(s): 355-360.

CONCLUSIONES
114
6.2 FUTURAS LÍNEAS DE INVESTIGACIÓN
La investigación plantea varias líneas de trabajo futuras de cara a acabar de
confirmar la validez de los esquemas propuestos en el trabajo.
Por lo que respecta al control deslizante, la implementación mediante un
inversor de potencia, concretamente los controles a efectuar sobre las señales de
control de los interruptores. Además, uno de los inconvenientes del controlador en
modo deslizamiento es que trabaja a frecuencia variable, cosa que, a priori no es lo
más deseable para la planta de potencia. Por ello, el estudio de técnicas de
conmutación a frecuencia fija sería una temática interesante a analizar. La
implementación del control en forma discreta, para poder ser ejecutada por un
microprocesador, es otro punto a tener en cuenta.
Si nos fijamos en los métodos de estimación propuestos, una de las líneas de
investigación a seguir es la de estudiar las condiciones de estabilidad de los
estimadores, es decir, garantizar la convergencia del sistema completo. Los
métodos de inyección que se presentan en el presente trabajo son básicamente
sistemas en lazo abierto, con ocasionales correcciones de errores. Sería interesante
estudiar sistemas basados en inyección pero trabajando en lazo cerrado, pudiendo
realimentar variables y estudiar la estabilidad y los puntos de equilibrio del
sistema.
Por último, la experimentación en el laboratorio de un motor similar al
utilizado en las simulaciones, junto con la planta de potencia, permitiría la
comparación de los resultados obtenidos mediante simulación con los
experimentales, y poder confirmar o replantear lo expuesto en este trabajo.


116
7. BIBLIOGRAFÍA BÁSICA Y REFERENCIAS
7.1 BIBLIOGRAFÍA BÁSICA
[1] Erickson,R.W., Maksimovic,D.. “Fundamentals of Power Electronics” Segunda Edición. Springer. 2001.
[2] Fitzgerald.A.E., Kingsley. Umans,S.D.. “Electric Machinery” Sexta Edición. Mc Graw Hill. 2003.
[3] Ogata,K. “Ingeniería de Control Moderna” Tercera Edición. Pearson
Prentice Hall. 1998.
[4] Proakis,J.G., Manolakis, D.G., “ Tratamiento Digital de Señales” Tercera
Edición. Pearson Prentice Hall. 2005.
[5] Utkin.V, Guldner.j, Shi,J. “Sliding Mode Control in Electromechanical Systems” Segunda Edición. CRC PRESS 1999.
[6] Vas,P.. “Sensorless Vector and Direct Torque Control” Primera Edición.
Oxford Science Publications. 1998.
7.2 ARTÍCULOS EN REVISTAS I CONGRESOS
[7] Andreescu, G.-D.; Pitic, C.I.; Blaabjerg, F.; Boldea, I.;” Combined Flux Observer With Signal Injection Enhancement for Wide Speed Range Sensorless Direct Torque Control of IPMSM Drives” IEEE Transactions on Energy Conversion, 2008 , Page(s): 393 – 402.
[8] Arias, A.; Ortega, C.; Pou, J.; Gonzalez, D.; Balcells, J.; “Angle estimation for Sensorless Field Oriented Control with Matrix Converters and Surface Mount Permanent Magnet Synchronous Machines” IEEE PESC 2008. Power Electronics Specialists Conference.
[9] Arias, A.; Silva, C.A.; Asher, G.M.; Clare, J.C.; Wheeler, P.W.; ”Use of a matrix converter to enhance the sensorless control of a surface-mount permanent-magnet AC motor at zero and low frequency“.IEEE Transactions on Industrial Electronics, 2004 , Page(s): 1595 – 1604.

BIBLIOGRAFÍA
117
[10] Bolognani, S.; Oboe, R.; Zigliotto, M.; “Sensorless full-digital PMSM drive with EKF estimation of speed and rotor position” IEEE Transactions on Industrial Electronics, 1999 Page(s): 184 – 191.
[11] Depenbrock, M.; “Direct self-control (DSC) of inverter-fed induction machine “, IEEE Transactions on Power Electronics 1988 , Page(s): 420 – 429.
[12] Hao Zhu; Xi Xiao; Yongdong Li; “A simplified high frequency injection method for PMSM sensorless control ”.Power Electronics and Motion Control Conference, 2009. IEMC '09.
[13] Ilioudis, V.C.; Margaris, N.I.; “Sensorless Sliding Mode Observer based on rotor position error for salient-pole PMSM “ Conference on Control and Automation, 2009. MED '09. 17th Mediterranean Page(s): 1517 – 1522.
[14] Jansen, P.L.; Lorenz, R.D.; “Transducerless field orientation concepts employing saturation-induced saliencies in induction machines” IEEE Transactions on Industry Applications, 1996 , Page(s): 1380 – 1393.
[15] Jezernik, K.; Urlep, E.; Polic, A.; “Speed sensorless variable structure torque control of PMSM”.Industrial Electronics Society,2005. IECON 2005. 31st Annual Conference of IEEE. 2005.
[16] Ji-Hoon Jang; Seung-Ki Sul; Jung-Ik Ha; Ohto, M.; Ide, K.;“Analysis of permanent magnet machine for sensorless control based on high frequency signal injection ”.IEEE Transactions on Industrial Electronics, 2004 , Page(s): 1595 – 1604.
[17] Jung, Young-Seok; Kim, Marn-Go; “Sliding Mode Observer for Sensorless Control of IPMSM Drives” Journal Of Power Electronics 2008. JPE9-1- 14 Pages(s): 117- 123.
[18] Junggi Lee; Jinseok Hong; Kwanghee Nam; Ortega, R.; Praly, L.; Astolfi, A.;
“Sensorless Control of Surface-Mount Permanent-Magnet Synchronous Motors Based on a Nonlinear Observer”. IEEE Transactions on Power
Electronics, Vol. 25, No. 2, pp. 0885-8993, Febrero 2010.
[19] Li Yongdong; Zhu Hao; “Sensorless control of permanent magnet synchronous motor—a survey”. Vehicle Power and Propulsion
Conference, 2008. VPPC '08. Page(s): 1 – 8.

BIBLIOGRAFÍA
118
[20] Mohamed, Y.A.-R.I.; Lee, T.K.; ”Adaptive self-tuning MTPA vector controller for IPMSM drive system” IEEE Transactions on Energy Conversion,Volume: 21 2006 , Page(s): 636 – 644.
[21] Nakashima, S.; Inagaki, Y.; Miki, I.; “Sensorless initial rotor position estimation of surface permanent-magnet synchronous motor” IEEE Transactions on Industry Applications, 2000 , Page(s): 1598 – 1603.
[22] Ortega, R.; Praly, L.; Astolfi, A.; Junggi Lee; Kwanghee Nam; “Estimation of Rotor Position and Speed of Permanent Magnet Synchronous Motors With Guaranteed Stability” IEEE Transactions on Control Systems Technology 2011 , Page(s): 601 - 614.
[23] Ribeiro, L.A.S.; Degner, M.W.; Briz, F.; Lorenz, R.D.;; “Comparison of carrier signal voltage and current injection for the estimation of flux angle or rotor position ”. Industry Applications Conference, 1998. Thirty-Third IAS Annual Meeting. Vol.1.
[24] Solsona, J.; Valla, M.I.; Muravchik, C.; “A nonlinear reduced order observer for permanent magnet synchronous motors”; IEEE Transactions on Industrial Electronics, 1996 , Page(s): 492 – 497.
[25] Takahashi,I;Noguchi,T ; “A New Quick-Response and High- Efficiency Control Strategy of an Induction Motor”; IEEE Transactions on Industry Applications, Publication Year: 1986 , Page(s): 820 – 827.
[26] Yiguang Chen; Luyi Wang; Lingbing Kong; “Research of position sensorless control of PMSM based on high frequency signal injection”. International Conference on Electrical Machines and Systems,2008.
Page(s): 3973 - 3977.
[27] Yousfi, D.; El Adnani, M.“ Indirect position and speed sensing for PMSM sensorless control ”. 7th International Conference on Power Electronics, 2007. ICPE '07. Page(s): 817 – 822.
[28] Z. Yan, C. Jin, V.I. Utkin, “Sensorless Sliding-Mode Control of Induction Motors” IEEE Trans. on Industrial Electronics. Vol. 47, Dec. 00. pp. 1286- 1297.
[29] Zedong Zheng; Yongdong Li; Xi Xiao; Fadel, M.; “Mechanical sensorless control of SPMSM based on HF signal Injection and Kalman filter” ICEMS 2008. Conference on Electrical Machines and Systems, 2008.. International , Page(s): 1385 – 1390.