TARJETA ENTRENADORA FACFYM
196
UNIVERSIDAD NACIONAL PEDRO RUIZ GALLO FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS ESCUELA PROFESIONAL DE INGENIERÍA ELECTRÓNICA TESIS PARA OPTAR POR EL TÍTULO PROFESIONAL DE INGENIERO ELECTRÓNICO “DISEÑO E IMPLEMENTACIÓN DE TARJETA ENTRENADORA DE MICROCONTROLADORES PIC16FXXX PARA MEJORAR LAS HABILIDADES TÉCNICAS EN SOLUCIÓN DE PROBLEMAS EN APLICACIONES EMBEBIDAS DE LOS ESTUDIANTES DE INGENIERÍA ELECTRÓNICA” PRESENTADA POR: Bach. Petrozzi Puse Renzo Stefano Bach. Vílchez Castillo Luis Miguel ASESOR: Ing. Carlos Oblitas Vera Lambayeque – Perú 2019
Transcript of TARJETA ENTRENADORA FACFYM

UNIVERSIDAD NACIONAL PEDRO
RUIZ GALLO
FACULTAD DE CIENCIAS FÍSICAS
Y MATEMÁTICAS
ESCUELA PROFESIONAL DE INGENIERÍA
ELECTRÓNICA
TESIS
PARA OPTAR POR EL TÍTULO PROFESIONAL DE
INGENIERO ELECTRÓNICO
“DISEÑO E IMPLEMENTACIÓN DE TARJETA ENTRENADORA
DE MICROCONTROLADORES PIC16FXXX PARA MEJORAR
LAS HABILIDADES TÉCNICAS EN SOLUCIÓN DE PROBLEMAS
EN APLICACIONES EMBEBIDAS DE LOS ESTUDIANTES DE
INGENIERÍA ELECTRÓNICA”
PRESENTADA POR:
Bach. Petrozzi Puse Renzo Stefano
Bach. Vílchez Castillo Luis Miguel
ASESOR:
Ing. Carlos Oblitas Vera
Lambayeque – Perú
2019

UNIVERSIDAD NACIONAL PEDRO
RUIZ GALLO
FACULTAD DE CIENCIAS FÍSICAS
Y MATEMÁTICAS
ESCUELA PROFESIONAL DE INGENIERÍA
ELECTRÓNICA
TESIS
PARA OPTAR POR EL TÍTULO PROFESIONAL DE
INGENIERO ELECTRÓNICO
“DISEÑO E IMPLEMENTACIÓN DE TARJETA ENTRENADORA
DE MICROCONTROLADORES PIC16FXXX PARA MEJORAR
LAS HABILIDADES TÉCNICAS EN SOLUCIÓN DE PROBLEMAS
EN APLICACIONES EMBEBIDAS DE LOS ESTUDIANTES DE
INGENIERÍA ELECTRÓNICA”
PRESENTADA POR:
Bach. Petrozzi Puse Renzo Stefano
Bach. Vílchez Castillo Luis Miguel
ASESOR:
Ing. Carlos Oblitas Vera
Lambayeque – Perú
2019

iii

v

vi
AGRADECIMIENTOS
Agradezco a Dios en primer lugar, por darme vida, salud, constancia, paciencia, espíritu
de lucha y enseñarme cada día que un camino sin obstáculos no es camino.
A mis padres, por el gran esfuerzo que han hecho por darme siempre lo mejor en la medida
de sus posibilidades, y a mis hermanos por su gran apoyo a lo largo de esta lucha constante
y especialmente, por ser parte importante durante toda mi formación profesional.
A los miembros del jurado por haberme permitido desarrollar este trabajo de
investigación, especialmente al Ing. Manuel Ramírez Castro, al Ing. Francisco Segura
Altamirano y a mi asesor, Ing. Carlos Oblitas Vera, por el tiempo y la paciencia que han
dedicado para ayudarme y guiarme en la elaboración de este trabajo, además de las
enseñanzas que recibí de todos ellos a lo largo de las materias que me impartieron.
Al Ing. Óscar Romero Cortez por haber colaborado con el trabajo de investigación,
cediéndome el valioso tiempo de una de sus clases para la demostración del proyecto
implementado.
Renzo Stefano Petrozzi Puse
Gracias a mis padres que año tras año durante toda mi vida me han enseñado a ir por el
camino del bien y me han aconsejado certeramente tanto en mi vida personal como
profesional.
A mis hermanas Sylvia y Mayra por el apoyo que siempre me brindan en las decisiones
que he venido tomando hasta el momento.
A mi enamorada Claudia, por su incondicional apoyo, por sus consejos y por su empuje
día a día en cada trabajo que realicé.
Al Ing. Francisco Segura Altamirano y al Ing. Carlos Oblitas Vera por su atención y
tiempo dedicado al desarrollo de este trabajo.
Luis Miguel Vílchez Castillo

vii
DEDICATORIA
Dedicatoria a mis padres, a mis hermanos y a mi familia entera, porque han estado
conmigo desde que formé parte de esa gran parentela que Dios nos ha permitido tener y
conservar, ofreciéndome su cariño e inmenso apoyo que ha resultado muy valioso para mí.
Gracias además por sus valiosos consejos, sencillos y honestos en todo momento.
Renzo Stefano Petrozzi Puse
Este trabajo va dedicado a mis padres que en conjunto y con gran esfuerzo siempre me
han ayudado para poder cumplir mis metas personales y profesionales.
De igual manera a mis hermanas que siempre han sumado con sus consejos en cada
proyecto y/o trabajo que haya realizado.
Luis Miguel Vílchez Castillo

viii
RESUMEN
Se presenta el diseño de un Sistema de Desarrollo para microcontroladores PIC de gama
media, de carácter didáctico y cuyo objetivo es facilitar la labor del estudiante al implementar
sencillamente diversas aplicaciones que los incluyan, desarrolladas en cualquier lenguaje de
programación para PIC, así como el trabajo del docente al evaluar de manera rápida y
cómoda cada uno de estos laboratorios; de esta manera, podrán implementarse más de un
laboratorio por clase si fuera necesario. La tarjeta dispone de periféricos utilizados en
aplicaciones reales, donde ninguno de ellos está conectado de manera predeterminada a los
pines de E/S de los microcontroladores. Además, la tarjeta será estándar para cualquier
microcontrolador PIC de la serie 16FXXX de 18, 28 y 40 pines, ya que todos los
microcontroladores PIC de Microchip de una gama específica tienen la misma distribución
de pines. Se provee el manual de uso de la tarjeta, un compendio de tutoriales que incluyen
diversos códigos fuente de aplicaciones reales programadas en lenguaje Assembler cuyo
hardware se basa en los módulos de la tarjeta diseñada, y un conjunto de softwares usados
para la programación de PIC y aplicaciones que los involucren.
Palabras clave: Sistema, microcontrolador, entrenador, modular, periférico, lenguaje,
programación, software, aplicación, instrucción.

ix
ABSTRACT
It presents the design of a Development System for PIC microcontrollers of medium
range, of didactic character and whose objective is to facilitate the work of the student when
implementing simply diverse applications that include them, developed in any programming
language for PIC, as well as the work of the teacher when evaluating quickly. and
comfortable each of these laboratories; in this way, more than one laboratory can be
implemented per class if necessary. The card has peripherals used in real applications, where
none of them are connected by default to the I/O pins of the microcontrollers. In addition,
the card will be standard for any PIC microcontroller of the 16FXXX series of 18, 28 and 40
pins, since all Microchip PIC microcontrollers of a specific range have the same distribution
of pins. The user manual of the card is provided, a compendium of tutorials that include
various source codes of real applications programmed in Assembler language whose
hardware is based on the modules of the designed card, and a set of software used for
programming of PIC and applications that involve them.
Keywords: System, microcontroller, trainer, modular, peripheral, language,
programming, software, application, instruction.

x
ÍNDICE
ÍNDICE .................................................................................................................................................. X
LISTA DE TABLAS .......................................................................................................................... XIV
LISTA DE FIGURAS .......................................................................................................................... XV
INTRODUCCIÓN ................................................................................................................................... 1
PLANTEAMIENTO DE LA INVESTIGACIÓN ...................................................................... 2
Síntesis de la situación problemática ............................................................................................... 2
Formulación del problema de investigación .................................................................................... 3
Formulación de la hipótesis ............................................................................................................. 3
OBJETIVOS ............................................................................................................................. 3
Objetivo general .............................................................................................................................. 3
Objetivos específicos ....................................................................................................................... 4
CAPÍTULO I: DISEÑO TEÓRICO ........................................................................................... 5
1.1) Antecedentes ........................................................................................................................ 5
1.2) Microcontrolador ................................................................................................................. 7
1.3) Arquitectura de microcontroladores ..................................................................................... 8
1.4) Microprocesador (µP) vs Microcontrolador (µC) ................................................................ 8
1.5) Tarjeta entrenadora de microcontroladores ....................................................................... 10
1.6) Gama media de microcontroladores PIC ........................................................................... 11
1.7) Programación Assembler para µC PIC16FXXX ................................................................. 12
1.8) Inicialización del reset de un microcontrolador.................................................................. 12
1.9) Memoria de programa y de datos del µC PIC16FXXX ....................................................... 14
1.10) Set de instrucciones de los µC PIC16FXXX ................................................................... 15
1.11) Contador de programa (PC) .......................................................................................... 15
1.12) Ciclo de máquina ........................................................................................................... 16
1.13) Segmentación de memoria – Pipeline ............................................................................. 17
1.14) Pila o stack de un microcontrolador .............................................................................. 18
1.15) Ejemplo de llamado y retorno de subrutina .................................................................... 18
1.16) Sistema de interrupciones .............................................................................................. 19

xi
1.17) Microcontroladores PIC16FXXX ................................................................................... 20
1.18) Tipos de osciladores ...................................................................................................... 24
1.19) Configuraciones del oscilador ....................................................................................... 25
1.20) Modulación PWM .......................................................................................................... 26
1.21) Comunicación serial ...................................................................................................... 27
1.22) Modos de transmisión de datos ...................................................................................... 28
1.23) Protocolo de comunicaciones I2C .................................................................................. 29
1.24) Protocolo de comunicaciones SPI .................................................................................. 30
1.25) Protocolo de comunicaciones Bluetooth ......................................................................... 31
1.26) Protocolo de comunicaciones RS232.............................................................................. 33
1.27) Protocolo de comunicaciones 1 – wire ........................................................................... 35
1.28) Señal analógica ............................................................................................................. 36
1.29) Conversión analógica digital ......................................................................................... 37
1.30) Conversión digital analógica ......................................................................................... 38
1.31) Tipos de muestreo para encuestas .................................................................................. 39
1.32) Muestreos no probabilísticos ......................................................................................... 40
CAPÍTULO II: DISEÑO METODOLÓGICO ......................................................................... 42
2.1) Panel de control del software EAGLE 7.6.0 ....................................................................... 43
2.2) Diagrama esquemático del software EAGLE 7.6.0 ............................................................. 43
2.3) Diagrama PCB del software EAGLE 7.6.0 ......................................................................... 44
2.4) Módulo PICkit 2 Clone ...................................................................................................... 45
2.5) Selector de fuente de energía para etapas de control .......................................................... 46
2.6) Protección contra cortocircuito para etapas de control ...................................................... 47
2.7) Grabador de microcontrolador PIC12FXXX ...................................................................... 48
2.8) Módulo de grabación de EEPROM I2C .............................................................................. 49
2.9) Entrenador de microcontroladores PIC16FXXX de 18 pines .............................................. 50
2.10) Entrenador de microcontroladores PIC16FXXX de 28 pines ......................................... 51
2.11) Entrenador de microcontroladores PIC16FXXX de 40 pines ......................................... 52
2.12) Objetivo de los tres microcontroladores PIC16FXXX .................................................... 53
2.13) Módulo de nueve diodos LED ........................................................................................ 54

xii
2.14) Módulo de cinco pulsadores NO (Normally Open) ......................................................... 55
2.15) Módulo alarma GSM ..................................................................................................... 55
2.16) Módulo LCD 16x2 ......................................................................................................... 56
2.17) Módulo de dos potenciómetros ....................................................................................... 57
2.18) Módulo teclado hexadecimal .......................................................................................... 58
2.19) Módulos CNY70, LDR, LM35 y BH1750 ........................................................................ 58
2.20) Módulos potenciómetro de precisión, DAC y timer ........................................................ 59
2.21) Módulo sensor ultrasónico ............................................................................................. 60
2.22) Módulo matriz LED monocromática 8x8 ........................................................................ 61
2.23) Módulo sensor de humedad ............................................................................................ 61
2.24) Módulo DAC R–2R ........................................................................................................ 62
2.25) Módulo buzzer activo ..................................................................................................... 63
2.26) Módulo NTC .................................................................................................................. 63
2.27) Módulo de lectura/escritura de EEPROM I2C ................................................................ 64
2.28) Módulo RTC DS1307 ..................................................................................................... 64
2.29) Módulo de comunicación RS232 .................................................................................... 65
2.30) Módulo de comunicación bluetooth ................................................................................ 66
2.31) Módulo de lectura/escritura de EEPROM SPI ............................................................... 66
2.32) Módulo sensor digital de temperatura ............................................................................ 67
2.33) Módulo de dos displays multiplexados ........................................................................... 68
2.34) Módulo de detección de cruce por cero .......................................................................... 69
2.35) Módulo de alimentación para etapas de potencia DC .................................................... 70
2.36) Protección contra cortocircuito para etapas de potencia DC ......................................... 71
2.37) Módulo buzzer pasivo .................................................................................................... 72
2.38) Módulo relé optoacoplado ............................................................................................. 73
2.39) Módulo de PWM para cargas DC .................................................................................. 73
2.40) Módulo de PWM basada en AC ..................................................................................... 74
2.41) Módulo de etapas de potencia para motores DC ............................................................ 75
2.42) Proceso de fabricación de la tarjeta entrenadora FACFYM ........................................... 77
2.43) Diagramas de la tarjeta entrenadora FACFYM ............................................................. 80

xiii
2.44) Pruebas de funcionamiento de la tarjeta entrenadora FACFYM .................................... 80
2.45) Presupuesto ................................................................................................................... 86
CAPÍTULO III: RESULTADOS Y DISCUSIÓN .................................................................... 91
Evaluación del curso “Sistemas Digitales” ................................................................................... 91
Resultados de la primera encuesta – séptimo ciclo ........................................................................ 92
Resultados de la segunda encuesta – octavo ciclo .......................................................................... 94
Resultados de la tercera encuesta – octavo ciclo ........................................................................... 97
Discusión....................................................................................................................................... 98
CAPÍTULO IV: CONCLUSIONES ...................................................................................... 100
CAPÍTULO V: RECOMENDACIONES............................................................................... 101
REFERENCIAS BIBLIOGRÁFICAS .................................................................................................. 102
BIBLIOGRAFÍA ................................................................................................................................. 104
ANEXOS ............................................................................................................................................. 105
ANEXO A – MANUAL DE INSTRUCCIONES DE LA TARJETA ENTRENADORA FACFYM ..... 106
ANEXO B – CÓDIGOS DE PROGRAMACIÓN EN MPLAB ............................................................ 156
1. ENCENDIDO DE UN LED............................................................................................ 157
2. DETECCIÓN DE CRUCE POR CERO .......................................................................... 159
ANEXO C – FORMATO DE PRIMERA Y SEGUNDA ENCUESTA ................................................ 163
ANEXO D – FORMATO DE TERCERA ENCUESTA ....................................................................... 166
ANEXO E – ACTAS DE ENTREGA DE MATERIAL DONADO AL LABORATORIO DE
ELECTRÓNICA ....................................................................................................................................... 168
ANEXO G – DIAGRAMA ESQUEMÁTICO DE LA TARJETA ENTRENADORA FACFYM ......... 171

xiv
LISTA DE TABLAS
Tabla 1 Tabla de comparaciones ..................................................................................... 9
Tabla 2 Direccionamiento en la memoria de programa a través del PC ......................... 16
Tabla 3 Tabla de equivalencias ....................................................................................... 16
Tabla 4 Segmentación de memoria ................................................................................. 17
Tabla 5 Tabla de Características ..................................................................................... 20
Tabla 6 Tabla de capacidades ......................................................................................... 30
Tabla 7 Tabla de clasificación del Bluetooth ................................................................. 32
Tabla 8 Tabla de velocidades ......................................................................................... 33
Tabla 9 Tabla de presupuestos ....................................................................................... 86

xv
LISTA DE FIGURAS
Figura 1 Diagrama de bloques de un microcontrolador ................................................... 7
Figura 2 Arquitectura Harvard para las memorias de datos e instrucciones .................... 8
Figura 3 Arq. Von Neuman para las memorias de datos e instrucciones ......................... 8
Figura 4 Tarjeta Entrenadora Arduino UNO .................................................................. 11
Figura 5 Tarjeta Entrenadora FACFYM ......................................................................... 11
Figura 6 MCLR – Circuito recomendado ....................................................................... 13
Figura 7 Ejemplo de llamado y retorno de subrutina ...................................................... 19
Figura 8 Proceso de una interrupción ............................................................................. 20
Figura 9 Diagrama de Pines del PIC16F628A ................................................................ 23
Figura 10 Diagrama de Pines del PIC16F873A .............................................................. 24
Figura 11 Diagrama de Pines del PIC16F877A .............................................................. 24
Figura 12 Oscilador XT, HS o LP para el PIC16F628A ................................................ 25
Figura 13 Oscilador tipo RC ........................................................................................... 26
Figura 14 Ejemplo de Señal PWM con Duty Cicle al 30% ............................................ 27
Figura 15 Esquema de comunicación I2C con una EEPROM 24C04 ............................ 30
Figura 16 Diagrama de conexiones del bus SPI – Modo multiesclavo .......................... 31
Figura 17 Ejemplo de comunicación serial sin paridad .................................................. 34
Figura 18 Esquema de comunicación serial usando la norma RS232 ............................ 35
Figura 19 Bus de comunicación 1–Wire ......................................................................... 36
Figura 20 Ejemplo de señal analógica ............................................................................ 36
Figura 21 Señal analógica muestreada como paso previo a su tratamiento digital ........ 37
Figura 22 Red de resistencias en escalera para un DAC ................................................ 38
Figura 23 Muestreo probabilístico o aleatorio ................................................................ 39
Figura 24 Muestreo no probabilístico o no aleatorio ...................................................... 40

xvi
Figura 25 Muestreo no probabilístico por conveniencia................................................. 41
Figura 26 Panel de Control del software EAGLE 7.6.0 ................................................. 43
Figura 27 Diagrama esquemático de la Tarjeta Entrenadora FACFYM ........................ 43
Figura 28 Diagrama PCB de la Tarjeta Entrenadora FACFYM ..................................... 44
Figura 29 Módulo PICkit 2 Clone – Esquemático .......................................................... 45
Figura 30 Selector de Fuente de Energía para Etapas de Control – Esquemático .......... 46
Figura 31 Protección contra Cortocircuito para Etapas de Control – Esquemático ....... 47
Figura 32 Grabador de Microcontrolador PIC12FXXX – Esquemático ........................ 48
Figura 33 Módulo de Grabación de EEPROM I2C – Esquemático ................................ 49
Figura 34 Entrenador de µC PIC16FXXX de 18 Pines – Esquemático ......................... 50
Figura 35 Entrenador de µC PIC16FXXX de 28 Pines – Esquemático ......................... 51
Figura 36 Entrenador de µC PIC16FXXX de 40 Pines – Esquemático ......................... 52
Figura 37 Módulo de Nueve Diodos LED – Esquemático ............................................. 54
Figura 38 Módulo de 5 Pulsadores NO (Normally Open) – Esquemático ..................... 55
Figura 39 Módulo Alarma GSM – Esquemático ............................................................ 55
Figura 40 Módulo LCD 16x2 – Esquemático ................................................................. 56
Figura 41 Módulo de Dos Potenciómetros – Esquemático ............................................. 57
Figura 42 Módulo Teclado Hexadecimal – Esquemático ............................................... 58
Figura 43 Módulos CNY70, LDR, LM35 y BH1750 – Esquemático ............................ 58
Figura 44 Módulos Potenciómetro de Precisión, DAC y Timer – Esquemático ............ 59
Figura 45 Módulo Sensor Ultrasónico – Esquemático ................................................... 60
Figura 46 Módulo Matriz LED Monocromática 8x8 – Esquemático ............................. 61
Figura 47 Módulo Sensor de Humedad – Esquemático ................................................. 61
Figura 48 Módulo DAC R–2R – Esquemático ............................................................... 62
Figura 49 Módulo Buzzer Activo – Esquemático........................................................... 63

xvii
Figura 50 Módulo NTC – Esquemático .......................................................................... 63
Figura 51 Módulo de Lectura/Escritura de EEPROM I2C – Esquemático .................... 64
Figura 52 Módulo RTC DS1307 – Esquemático ............................................................ 64
Figura 53 Módulo de Comunicación RS232 – Esquemático .......................................... 65
Figura 54 Módulo de Comunicación Bluetooth – Esquemático ..................................... 66
Figura 55 Módulo de Lectura/Escritura de EEPROM SPI – Esquemático .................... 66
Figura 56 Módulo Sensor Digital de Temperatura – Esquemático................................. 67
Figura 57 Módulo de Dos Displays Multiplexados – Esquemático ............................... 68
Figura 58 Módulo de Detección de Cruce por Cero – Esquemático .............................. 69
Figura 59 Módulo de Alimentación para Etapas de Potencia DC – Esquemático ......... 70
Figura 60 Protección contra Cortocircuito para Etapas de Potencia DC – Esquemático 71
Figura 61 Módulo Buzzer Pasivo – Esquemático ........................................................... 72
Figura 62 Módulo Relé Optoacoplado – Esquemático ................................................... 73
Figura 63 Módulo de PWM para cargas DC – Esquemático .......................................... 73
Figura 64 Módulo de PWM Basada en AC – Esquemático ........................................... 74
Figura 65 Módulo de Etapas de Potencia para Motor DC Unipolar – Esquemático ...... 75
Figura 66 Módulo de Etapas de Potencia para Motor DC Bipolar – Esquemático ........ 76
Figura 67 Serigrafía de componentes de la Tarjeta Entrenadora FACFYM .................. 77
Figura 68 Serigrafía de pistas de la Tarjeta Entrenadora FACFYM .............................. 78
Figura 69 Bachilleres tesistas soldando sobre la tarjeta entrenadora FACFYM ............ 78
Figura 70 Tarjeta Entrenadora FACFYM completamente implementada ...................... 79
Figura 71 Bachilleres tesistas muestran tarjeta implementada en lado de componentes 79
Figura 72 Bachilleres tesistas muestran tarjeta implementada en lado de pistas ............ 80
Figura 73 Termómetro digital con PIC16F873A y LM35 .............................................. 81
Figura 74 Semáforo de dos intersecciones con PIC16F628A ........................................ 81

xviii
Figura 75 Medidor de distancia con PIC16F877A y HC-SR04 ..................................... 82
Figura 76 Inicio de la demostración de la Tarjeta Entrenadora FACFYM .................... 82
Figura 77 Explicación del proceso para grabar un PIC con el módulo PICkit2 Clone .. 83
Figura 78 Explicación del montaje de un programa grabado en el PIC16F628A .......... 83
Figura 79 Tarjeta Entrenadora FACFYM – Diagrama PCB .......................................... 84
Figura 80 Tarjeta Entrenadora FACFYM – Diagrama de pistas .................................... 85
Figura 81 Resultado: Marcas de microcontroladores – 7° ciclo ..................................... 92
Figura 82 Resultado: Software de grabación de microcontroladores – 7° ciclo ............. 92
Figura 83 Resultado: Lenguajes de programación para PIC – 7° ciclo .......................... 93
Figura 84 Resultado: Situación actual del curso "Sistemas Digitales" – 7° ciclo .......... 93
Figura 85 Resultado: Progreso del curso "Sistemas Digitales" – 7° ciclo ...................... 93
Figura 86 Resultado: Grado de acuerdo con opiniones propuestas – 7° ciclo ................ 94
Figura 87 Resultado: Marcas de microcontroladores – 8° ciclo ..................................... 94
Figura 88 Resultado: Software de grabación de microcontroladores – 8° ciclo ............. 95
Figura 89 Resultado: Lenguajes de programación para PIC – 8° ciclo .......................... 95
Figura 90 Resultado: Situación actual del curso "Sistemas Digitales" – 8° ciclo .......... 95
Figura 91 Resultado: Progreso del curso "Sistemas Digitales" – 8° ciclo ...................... 96
Figura 92 Resultado: Grado de acuerdo con opiniones propuestas – 8° ciclo ................ 96
Figura 93 Resultados del primer bloque de preguntas de la tercera encuesta ................ 97
Figura 94 Resultados del segundo bloque de preguntas de la tercera encuesta .............. 97
Figura 95 Resultados del tercer bloque de preguntas de la tercera encuesta .................. 98
Figura 96 Tarjeta Entrenadora FACFYM .......................................................................... i
Figura 97 Módulo 1 – Hardware ....................................................................................... 1
Figura 98 Descripción del Módulo 1 ................................................................................ 1
Figura 99 Módulo 2 – Hardware ....................................................................................... 3

xix
Figura 100 Descripción del Módulo 2 .............................................................................. 4
Figura 101 Módulo 3 – Hardware ..................................................................................... 4
Figura 102 Descripción del Módulo 3 .............................................................................. 5
Figura 103 Selección de la fuente ..................................................................................... 5
Figura 104 Módulo 4 – Hardware ..................................................................................... 6
Figura 105 Descripción del Módulo 4 .............................................................................. 6
Figura 106 Módulo 4 – Circuito auxiliar .......................................................................... 6
Figura 107 Módulo 5 – Hardware ..................................................................................... 7
Figura 108 Descripción del Módulo 5 .............................................................................. 7
Figura 109 Módulo 5 – Circuito auxiliar .......................................................................... 8
Figura 110 Módulo 6 – Hardware ..................................................................................... 9
Figura 111 Descripción del Módulo 6 .............................................................................. 9
Figura 112 Módulo 6 – Circuito auxiliar ........................................................................ 10
Figura 113 Módulo 7 – Hardware ................................................................................... 11
Figura 114 Descripción del Módulo 7 ............................................................................ 11
Figura 115 Módulo 7 – Circuito auxiliar ........................................................................ 12
Figura 116 Módulo 8 - Hardware ................................................................................... 12
Figura 117 Descripción del Módulo 8 ............................................................................ 13
Figura 118 Módulo 8 – Circuito auxiliar ........................................................................ 13
Figura 119 Módulo 9 – Hardware ................................................................................... 14
Figura 120 Descripción del Módulo 9 ............................................................................ 14
Figura 121 Módulo 10 – Hardware ................................................................................. 15
Figura 122 Descripción del Módulo 10 .......................................................................... 15
Figura 123 Módulo 11 – Hardware ................................................................................. 15
Figura 124 Descripción del Módulo 11 .......................................................................... 16

xx
Figura 125 Módulo 12 – Hardware ................................................................................. 16
Figura 126 Descripción del Módulo 12 .......................................................................... 17
Figura 127 Módulo 13 – Hardware ................................................................................. 17
Figura 128 Descripción del Módulo 13 .......................................................................... 18
Figura 129 Módulo 14 – Hardware ................................................................................. 19
Figura 130 Descripción del Módulo 14 .......................................................................... 19
Figura 131 Módulo 15 – Hardware ................................................................................. 19
Figura 132 Descripción del Módulo 15 .......................................................................... 20
Figura 133 Módulo 16 – Hardware ................................................................................. 20
Figura 134 Descripción del Módulo 16 .......................................................................... 21
Figura 135 Módulo 17 – Hardware ................................................................................. 21
Figura 136 Descripción del Módulo 17 .......................................................................... 22
Figura 137 Módulo 18 – Hardware ................................................................................. 23
Figura 138 Descripción del Módulo 18 .......................................................................... 23
Figura 139 Módulo 19 – Hardware ................................................................................. 24
Figura 140 Descripción del Módulo 19 .......................................................................... 24
Figura 141 Módulo 20 – Hardware ................................................................................. 25
Figura 142 Descripción del Módulo 20 .......................................................................... 25
Figura 143 Módulo 21 – Hardware ................................................................................. 26
Figura 144 Descripción del Módulo 21 .......................................................................... 26
Figura 145 Módulo 22 – Hardware ................................................................................. 27
Figura 146 Descripción del Módulo 22 .......................................................................... 27
Figura 147 Módulo 23 – Hardware ................................................................................. 28
Figura 148 Descripción del Módulo 23 .......................................................................... 28
Figura 149 Módulo 24 – Hardware ................................................................................. 29

xxi
Figura 150 Descripción del Módulo 24 .......................................................................... 29
Figura 151 Módulo 25 – Hardware ................................................................................. 29
Figura 152 Descripción del Módulo 25 .......................................................................... 30
Figura 153 Módulo 26 – Hardware ................................................................................. 30
Figura 154 Descripción del Módulo 26 .......................................................................... 31
Figura 155 Módulo 27 – Hardware ................................................................................. 31
Figura 156 Descripción del Módulo 27 .......................................................................... 31
Figura 157 Módulo 28 – Hardware ................................................................................. 32
Figura 158 Descripción del Módulo 27 .......................................................................... 32
Figura 159 Módulo 29 – Hardware ................................................................................. 33
Figura 160 Descripción del Módulo 29 .......................................................................... 33
Figura 161 Módulo 30 – Hardware ................................................................................. 33
Figura 162 Descripción del Módulo 30 .......................................................................... 34
Figura 163 Módulo 31 – Hardware ................................................................................. 35
Figura 164 Descripción del Módulo 31 .......................................................................... 35
Figura 165 Módulo 32 – Hardware ................................................................................. 36
Figura 166 Módulo 33 – Hardware ................................................................................. 36
Figura 167 Descripción del Módulo 32 .......................................................................... 37
Figura 168 Descripción del Módulo 33 .......................................................................... 37
Figura 169 Módulo 34 – Hardware ................................................................................. 38
Figura 170 Descripción del Módulo 34 .......................................................................... 38
Figura 171 Módulo 35 – Hardware ................................................................................. 39
Figura 172 Descripción del Módulo 35 .......................................................................... 39
Figura 173 Módulo 36 – Hardware ................................................................................. 40
Figura 174 Descripción del Módulo 36 .......................................................................... 40

xxii
Figura 175 Módulo 37 – Hardware Bipolar .................................................................... 41
Figura 176 Módulo 37 – Hardware Unipolar ................................................................. 41
Figura 177 Descripción del Módulo 37 – Bipolar .......................................................... 42
Figura 178 Descripción del Módulo 37 – Unipolar ........................................................ 43
Figura 179 Reconocimiento de Pines del C. I. PC817 .................................................... 44
Figura 180 Reconocimiento de pines del LCD 16x2 ...................................................... 44
Figura 181 Reconocimiento de Pines del Sensor LM35 ................................................. 45
Figura 182 Reconocimiento de Pines de un Teclado Hexadecimal ................................ 45
Figura 183 Encendido de un LED – Hardware ............................................................. 158
Figura 184 Detección de Cruce por Cero – Hardware .................................................. 162
Figura 185 Diagrama esquemático de la tarjeta entrenadora FACFYM ...................... 172

1
INTRODUCCIÓN
Se puede definir un microcontrolador como una microcomputadora completa
encapsulada en un circuito integrado, la cual contiene un programa que realiza una función
específica, por ello, el propósito fundamental de un microcontrolador es el de leer y ejecutar
los programas que el usuario le escribe; consecuentemente, la programación es una actividad
básica e indispensable cuando se diseñan circuitos que los incluyan, ya que en el micro-
controlador convergen diversos saberes de informática y electrónica, resultando una materia
imprescindible en la formación de nuestros futuros ingenieros electrónicos.
Es común encontrar microcontroladores en campos como la robótica y el automatismo,
en la industria del entretenimiento, en las telecomunicaciones, en la instrumentación, en el
hogar, en la industria automotriz, etc. Sin embargo, además de algunos elementos externos
necesarios para su funcionamiento (cristal, capacitores, resistencias, etc.), se necesita un
circuito especial para cargar un programa en la memoria del microcontrolador, comúnmente
denominado grabador PIC, si se trata de los microcontroladores de Microchip.
Por esta razón, para un aprendizaje y entrenamiento más completos en el diseño de
sistemas digitales, es necesario en el Laboratorio de Ingeniería Electrónica de la UNPRG
contar con una herramienta que le permita al estudiante simplificar algunas tareas básicas,
por ejemplo, el conexionado de las alimentaciones de los dispositivos.
Con este noble, pero ambicioso propósito, nace este proyecto de guía y ayuda para el
docente y el estudiante, basado en el Diseño e Implementación de Tarjeta Entrenadora
de Microcontroladores PIC16FXXX para Mejorar las Habilidades Técnicas en
Solución de Problemas en Aplicaciones Embebidas de los Estudiantes de Ingeniería
Electrónica.

2
PLANTEAMIENTO DE LA INVESTIGACIÓN
Síntesis de la situación problemática
Actualmente el Laboratorio de la Escuela Profesional de Ingeniería Electrónica de la
Universidad Nacional Pedro Ruiz Gallo carece de tarjetas entrenadoras de PIC y solo cuenta
con tarjetas entrenadoras FPGA, sin embargo, no es factible comparar FPGA con
microcontroladores ya que son dos tecnologías distintas y se utilizan con entornos de
programación diferentes; por ende, se propone el diseño e implementación de una tarjeta
entrenadora de microcontroladores PIC16FXXX de tipo PDIP con sus respectivas interfaces
(comunicación, potencia DC, potencia AC, visualización, etc.) embebidas en la misma
plataforma ante la carencia de tarjetas entrenadoras de PIC en el Laboratorio de Ingeniería
Electrónica de la UNPRG.
Se optó por la NO conexión predeterminada de ningún periférico a las líneas de E/S de
los microcontroladores, lo cual le permite al usuario entrenarse no solo a nivel de software
sino de hardware también, minimizando los problemas de falso contacto que normalmente
surgen cuando se implementan proyectos en protoboard.
A fin de que el estudiante de Ingeniería Electrónica no se perjudique por la falta de un
grabador externo, se instaló un grabador PICkit 2 Clone en la tarjeta; la cual posee también
la serigrafía adecuada para la correcta identificación de los pines de cada microcontrolador
PIC, así como del resto de dispositivos e interfaces.
Por último, se diseñan detalladamente una serie de aplicaciones con el software MPLAB
a fin de que el estudiante de Ingeniería Electrónica verifique su funcionamiento en tiempo
real a través de la plataforma.

3
Formulación del problema de investigación
¿Cómo el diseño e implementación de una tarjeta entrenadora de microcontroladores
PIC16FXXX mejorará las habilidades técnicas en solución de problemas en aplicaciones
embebidas de los estudiantes de Ingeniería Electrónica?
Formulación de la hipótesis
Si diseñamos e implementamos una tarjeta entrenadora de microcontroladores
PIC16FXXX, con diversas librerías y/o ejemplos de aplicaciones reales, además de
diferentes tarjetas e interfaces con conectores de propósito general se mejorarán las
habilidades técnicas en solución de problemas en aplicaciones embebidas de diferentes tipos,
minimizando los problemas de conexiones y acelerando el aprendizaje de los estudiantes de
Ingeniería Electrónica.
OBJETIVOS
Objetivo general
Diseñar e implementar una tarjeta entrenadora de microcontroladores PIC16FXXX con
diversas librerías y/o ejemplos de aplicaciones reales, además de diferentes tarjetas e
interfaces con conectores de propósito general para mejorar las habilidades técnicas en
solución de problemas en aplicaciones embebidas de diferentes tipos, minimizando los
problemas de conexiones y acelerando el aprendizaje de los estudiantes de Ingeniería
Electrónica.
4
Objetivos específicos
Realizar un estudio del equipamiento del laboratorio de electrónica respecto a las tarjetas
entrenadoras de PIC, además de verificar las dificultades de hardware y software de los
estudiantes en desarrollar proyectos con estos dispositivos.
Estudiar las características, limitaciones y alcances de los microcontroladores
PIC16FXXX, además de su interconexión con diferentes sensores y actuadores necesarios
para desarrollar aplicaciones con estos dispositivos.
Diseñar e implementar una tarjeta entrenadora de microcontroladores PIC16FXXX con
varias librerías e interfaces embebidas con conectores de propósito general.
Elaborar guías de aplicación didácticas que faciliten el desarrollo de aplicaciones en
Lenguaje ASSEMBLER para microcontroladores PIC16FXXX, haciendo uso eficiente de
los softwares necesarios para programar estos dispositivos.
5
CAPÍTULO I: DISEÑO TEÓRICO
1.1) Antecedentes
Marco Dujmovic
Coordinación de Ingeniería Electrónica – Decanato de Estudios Profesionales –
Universidad Simón Bolívar – Sartenejas, Venezuela – Diciembre, 2006.
DISEÑO DE UN ENTRENADOR DE MICROCONTROLADORES PIC PARA EL
LABORATORIO DE MICROCONTROLADORES DEL INSTITUTO UNIVERSITARIO
JESÚS OBRERO
Resumen: Se presenta el diseño de un sistema de desarrollo para microcontroladores PIC,
didáctico, sencillo, confiable y flexible a nivel de software y hardware, de ayuda tanto para
el docente como para el estudiante para lo cual se ofrecen 6 prácticas de laboratorio con su
respectiva descripción para el desarrollo de cada una; el diseño no presenta conexiones
predeterminadas entre los dispositivos PIC y los periféricos de entrada/salida.
Jorge Aníbal Pichucho Bombón
Escuela Politécnica Nacional – Quito, Ecuador – Marzo, 2007.
MÓDULO PARA VERIFICAR EL FUNCIONAMIENTO DE LOS PROGRAMAS
GRABADOS EN EL PIC 16F84A

6
Resumen: Este trabajo de investigación se basa específicamente en el PIC16F84A, el
cual es capaz de accionar cargas relativamente básicas (display LCD, teclado matricial,
display 7 segmentos, diodos LED y potenciómetros) ya que el PIC en cuestión está
conectado predeterminadamente a dichos periféricos, asimismo estos se seleccionan a través
de switches; se ofrecen algunos códigos de programación en BASIC.
Rafael Christian Franco Reina – Israel Efraín Montesdeoca Paladines
Facultad de Ingenierías – Carrera de Ingeniería Electrónica – Universidad Politécnica
Salesiana – Guayaquil, Ecuador – Septiembre, 2014.
DISEÑO Y CONSTRUCCIÓN DE CINCO ENTRENADORES DIDÁCTICOS CON
SISTEMAS MICROPROCESADOS Y DESARROLLO DE UNA APLICACIÓN DE
CONTROL DE VELOCIDAD PARA UN MOTOR DE CORRIENTE ALTERNA
Resumen: Este proyecto se estructuró en seis capítulos que partieron desde el análisis de
la situación problemática con los parámetros pertinentes; los fundamentos teóricos para la
construcción de los entrenadores didácticos; el diseño, construcción y montaje de
entrenadores didácticos con sistemas de microprocesados y aplicación de control de
velocidad de motor; el mantenimiento técnico correspondiente, las prácticas de laboratorio
hasta el costo generado.
Euler Deza Figueroa
Escuela Profesional de Ingeniería Electrónica – Facultad de Ciencias Físicas Y
Matemáticas – Universidad Nacional Pedro Ruiz Gallo – Lambayeque, Perú – 2010.
DISEÑO Y CONSTRUCCIÓN DE TARJETAS ENTRENADORAS PARA
APLICACIONES CON MICROCONTROLADORES PIC, MOTOROLA Y ATMEL
FPGA PARA EL ENTRENAMIENTO EN LAS DIFERENTES ÁREAS DE LOS

7
ALUMNOS DE LA ESCUELA PROFESIONAL DE INGENIERÍA ELECTRÓNICA –
UNPRG
Resumen: El objetivo de este proyecto es hacer de cada una de las tarjetas desarrolladas
aquí, una herramienta básica del alumnado, contribuyendo a largo plazo, a la formación del
ingeniero dedicado a la investigación con estas tecnologías, ya que, por medio de las diversas
interfaces involucradas en el funcionamiento de las tarjetas, podrá expandir su uso a áreas
como el Control, Electrónica de Potencia, Robótica, Telecomunicaciones, Sistemas
Digitales Avanzados, entre otras.
1.2) Microcontrolador
Un microcontrolador es un circuito integrado que contiene en su interior cada una de las
partes que conforman una computadora, esto es, Unidad Central de Procesos (CPU),
unidades de memoria RAM y ROM, puertos de entrada y salida y periféricos, resultando
interconectadas cada una de estas partes dentro del microcontrolador, el cual, para su
funcionamiento, requiere que se grabe un programa en él, de lo contrario, no podrá ejecutar
ninguna tarea.
Fuente: (Electrónica Desarrollo, 2011)
Figura 1 Diagrama de bloques de un microcontrolador
8
1.3) Arquitectura de microcontroladores
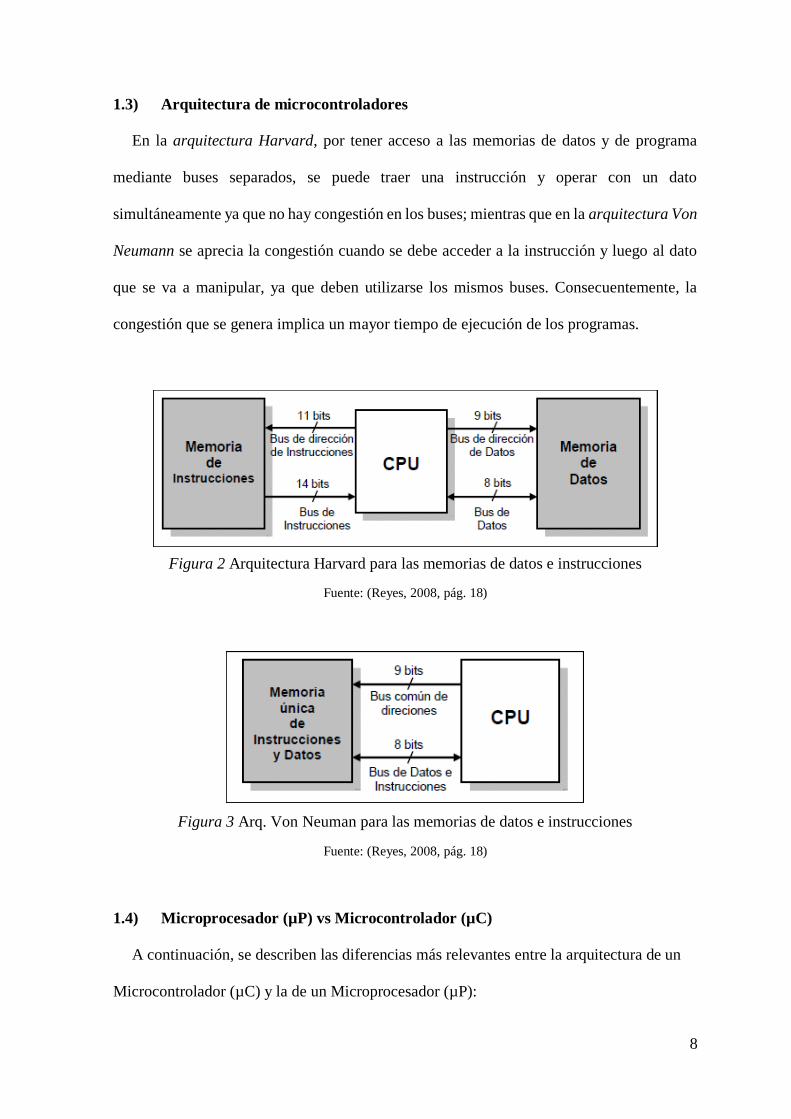
En la arquitectura Harvard, por tener acceso a las memorias de datos y de programa
mediante buses separados, se puede traer una instrucción y operar con un dato
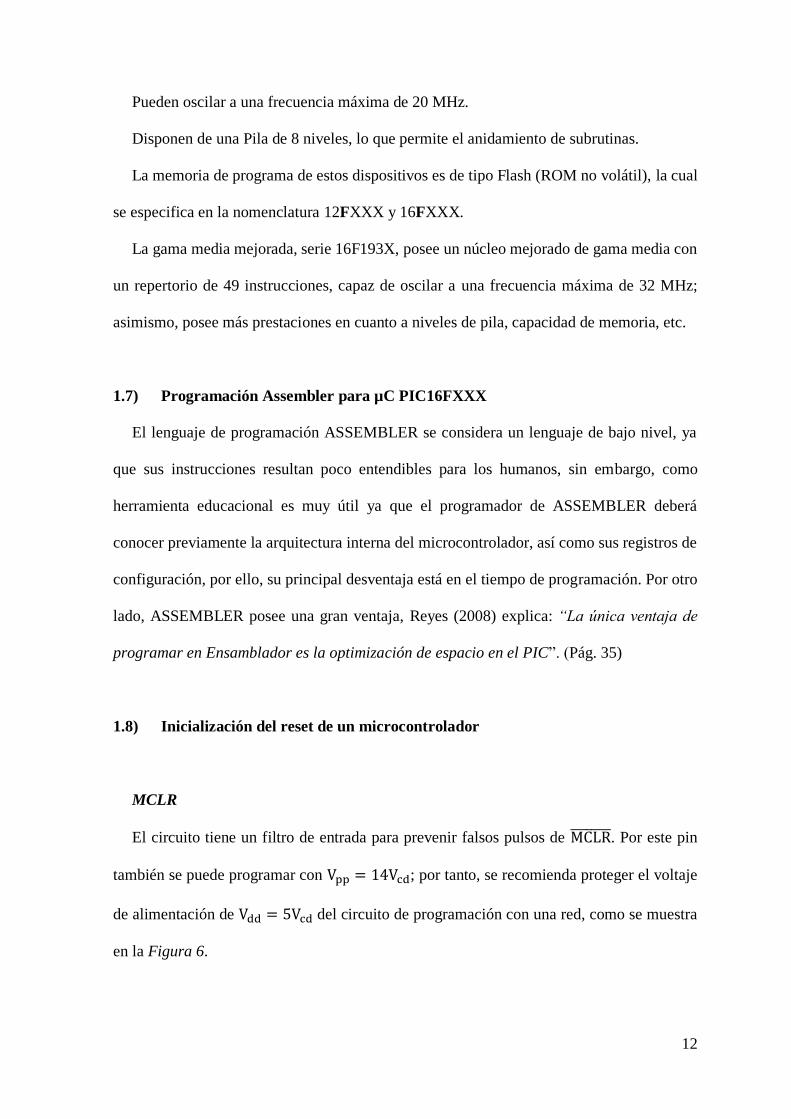
simultáneamente ya que no hay congestión en los buses; mientras que en la arquitectura Von
Neumann se aprecia la congestión cuando se debe acceder a la instrucción y luego al dato
que se va a manipular, ya que deben utilizarse los mismos buses. Consecuentemente, la
congestión que se genera implica un mayor tiempo de ejecución de los programas.
Fuente: (Reyes, 2008, pág. 18)
Fuente: (Reyes, 2008, pág. 18)
1.4) Microprocesador (µP) vs Microcontrolador (µC)
A continuación, se describen las diferencias más relevantes entre la arquitectura de un
Microcontrolador (µC) y la de un Microprocesador (µP):
Figura 2 Arquitectura Harvard para las memorias de datos e instrucciones
Figura 3 Arq. Von Neuman para las memorias de datos e instrucciones

9
Tabla 1
Tabla de comparaciones
µP µC
En conjunto con el sistema al cual
está incorporado, recibe el nombre de
sistema de tipo ABIERTO.
El dispositivo mismo recibe el
nombre de sistema de tipo CERRADO.
Necesita sacar al exterior buses
llamados bus de datos, bus de
direcciones y bus de control.
No necesita sacar buses hacia el
exterior debido a que están embebidos
dentro del dispositivo.
Necesita una memoria de programa
ROM y una memoria de datos RAM,
externas.
Tiene sus propias memorias de
programa ROM y de datos RAM,
embebidas dentro del dispositivo.
En él se pueden conectar diversos
dispositivos que van a depender
exclusivamente de lo que el usuario
requiera, es decir, el usuario puede
configurar el sistema ajustándolo a su
necesidad.
Solo se conectan los periféricos que
se han de utilizar, y para que estos
cumplan la función requerida es
necesario grabar un programa en la
ROM del PIC con las instrucciones que
debe ejecutar el microcontrolador.
En conjunto con el sistema al cual
está incorporado, realiza varias tareas.
Una vez programado, solo puede
realizar una tarea.
La detección de averías puede
tornarse muy tediosa, lo cual le resta
fiabilidad al sistema debido a su
tamaño.
Al ser más pequeño es más fiable, y
resulta mucho más rápida la detección
de alguna avería.

10
µP µC
Además del microprocesador
resultan necesarios otros dispositivos
para formar la computadora, lo cual se
deriva en un sistema de tamaño
considerable.
El tamaño se reduce
considerablemente, ya que solo bastan
el µC y los periféricos necesarios para
ejecutar una única tarea.
El costo del sistema construido a
partir de un microprocesador suele ser
elevado, ya que no son muy
comerciales.
El costo se reduce abismalmente, ya
que son mucho más comerciales.
Diferencias entre un µP y un µC (Elaboración propia)
1.5) Tarjeta entrenadora de microcontroladores
Una tarjeta entrenadora de microcontroladores PIC es un dispositivo modular que cuenta
con uno o más microcontroladores que, en conjunto con una serie de periféricos embebidos
o no en la misma, permiten verificar de manera sencilla en hardware un determinado proceso
diseñado en software. Actualmente la más popular es la tarjeta ARDUINO, la cual consiste
en un microcontrolador ATMEGA con conectores de propósito general embebidos en la
placa que sacan al exterior los pines de dicho dispositivo; cada conector tiene impresa su
leyenda correspondiente para la expansión de funciones de la tarjeta a través de diversos
periféricos, y actualmente existen distintas versiones de la misma, las cuales dependen
principalmente de las prestaciones del microcontrolador insertado en el zócalo respectivo de
dicha tarjeta entrenadora.

11
Fuente: (García, 2016)
1.6) Gama media de microcontroladores PIC
Abarca modelos con encapsulados desde 18 hasta 68 pines.
Presenta diversos componentes especiales, Pichucho (2007) expone: “Admisión de
interrupciones, comparadores de magnitudes analógicas, convertidores A/D, puertos serie,
salidas PWM, EEPROM interna y diversos temporizadores”. (Pág. 3)
Esta gama abarca las series 12FXXX y el PIC16FXXX y sus variantes.
Poseen un repertorio de 35 instrucciones de 14 bits cada una.
Figura 4 Tarjeta Entrenadora Arduino UNO
Figura 5 Tarjeta Entrenadora FACFYM
12
Pueden oscilar a una frecuencia máxima de 20 MHz.
Disponen de una Pila de 8 niveles, lo que permite el anidamiento de subrutinas.
La memoria de programa de estos dispositivos es de tipo Flash (ROM no volátil), la cual
se especifica en la nomenclatura 12FXXX y 16FXXX.
La gama media mejorada, serie 16F193X, posee un núcleo mejorado de gama media con
un repertorio de 49 instrucciones, capaz de oscilar a una frecuencia máxima de 32 MHz;
asimismo, posee más prestaciones en cuanto a niveles de pila, capacidad de memoria, etc.
1.7) Programación Assembler para µC PIC16FXXX
El lenguaje de programación ASSEMBLER se considera un lenguaje de bajo nivel, ya
que sus instrucciones resultan poco entendibles para los humanos, sin embargo, como
herramienta educacional es muy útil ya que el programador de ASSEMBLER deberá
conocer previamente la arquitectura interna del microcontrolador, así como sus registros de
configuración, por ello, su principal desventaja está en el tiempo de programación. Por otro
lado, ASSEMBLER posee una gran ventaja, Reyes (2008) explica: “La única ventaja de
programar en Ensamblador es la optimización de espacio en el PIC”. (Pág. 35)
1.8) Inicialización del reset de un microcontrolador
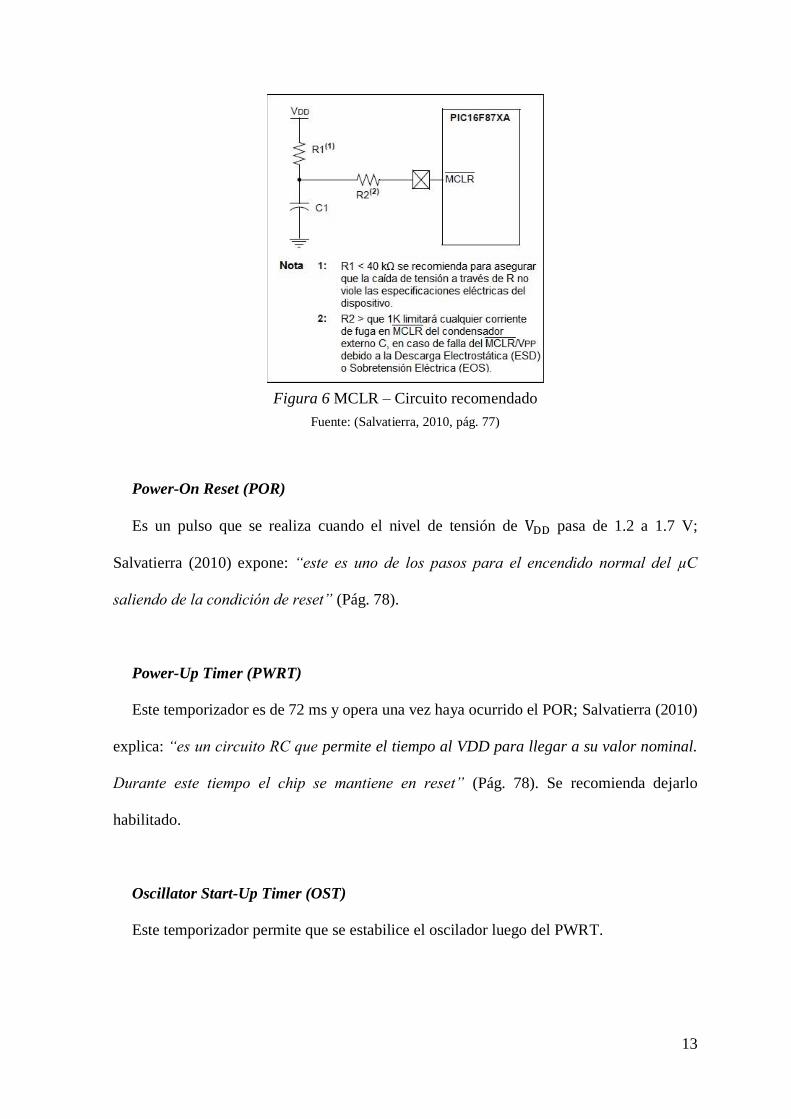
MCLR
El circuito tiene un filtro de entrada para prevenir falsos pulsos de MCLR . Por este pin
también se puede programar con Vpp = 14Vcd; por tanto, se recomienda proteger el voltaje
de alimentación de Vdd = 5Vcd del circuito de programación con una red, como se muestra
en la Figura 6.
13
Fuente: (Salvatierra, 2010, pág. 77)
Power-On Reset (POR)
Es un pulso que se realiza cuando el nivel de tensión de VDD pasa de 1.2 a 1.7 V;
Salvatierra (2010) expone: “este es uno de los pasos para el encendido normal del µC
saliendo de la condición de reset” (Pág. 78).
Power-Up Timer (PWRT)
Este temporizador es de 72 ms y opera una vez haya ocurrido el POR; Salvatierra (2010)
explica: “es un circuito RC que permite el tiempo al VDD para llegar a su valor nominal.
Durante este tiempo el chip se mantiene en reset” (Pág. 78). Se recomienda dejarlo
habilitado.
Oscillator Start-Up Timer (OST)
Este temporizador permite que se estabilice el oscilador luego del PWRT.
Figura 6 MCLR – Circuito recomendado

14
Brown-Out Reset (BOR)
BOR es un circuito que, en caso de ser activado, resetea el PIC si la alimentación del
mismo (VDD) cae por debajo de un nivel de tensión determinado por más de un tiempo
específico; los valores típicos son VBOR = 4V y TBOR = 100 µs, es decir, si VDD cae por
debajo de 4V por más de 100 µs, el PIC entrará en estado de reset hasta que VDD sea mayor
que VBOR, proceso que será temporizado con el PWRT.
1.9) Memoria de programa y de datos del µC PIC16FXXX
Memoria de programa del µC PIC16FXXX
Es de tipo Flash (ROM no volátil), la cual a diferencia de la memoria de programa de los
microcontroladores PIC16CXXX que era de tipo EEPROM, la primera es mucha más rápida
que esta última en los ciclos de escritura y borrado eléctrico; asimismo las memorias Flash
son de menor consumo y disponen de mayor capacidad. Por otro lado, la memoria de
programa del PIC almacena las instrucciones para la ejecución de un proceso y cada
instrucción ocupa una posición de memoria.
Memoria de datos del µC PIC16FXXX
Posee dos tipos de memoria de datos, una SRAM (RAM estática, volátil, de lectura y
escritura), la cual almacena los registros de configuración del PIC (registros de propósito
específico) y las variables que el usuario va creando a lo largo del programa (registros de
propósito general), y dispone también de una memoria EEPROM (no volátil, de lectura y
escritura) auxiliar para almacenar información relevante.

15
1.10) Set de instrucciones de los µC PIC16FXXX
Si bien existen tres tipos de set de instrucciones, CISC (Complex Instruction Set
Computer – Conjunto de Instrucciones Complejas para Computadora), RISC (Reduced
Instruction Set Computer – Conjunto de Instrucciones Reducidas para Computadora) y SISC
(Specific Instruction Set Computer – Conjunto de Instrucciones Específicas para
Computadora), los microcontroladores PIC se ubican en el segundo grupo con un repertorio
de 35 instrucciones; Salvatierra (2010) explica: “el número reducido de instrucciones
permite el uso de segmentación, lo cual hace más rápido el sistema” (Pág. 31).
1.11) Contador de programa (PC)
Este registro, normalmente denominado Program Counter (Contador de Programa) o PC
por sus siglas en inglés, es un registro interno del PIC totalmente equivalente al de cualquier
microprocesador, que contiene la dirección de la próxima instrucción a ejecutar.
Palacios, Remiro, & López (2004) explica:
“Este registro contiene la dirección de la próxima instrucción a ejecutar y se incrementa
automáticamente de manera que la secuencia natural de ejecución del programa es lineal,
una instrucción después de la otra” (Pág. 39).
Algunas instrucciones denominadas “de control”, cambian el contenido del PC alterando
la secuencia lineal de ejecución, como los salteos condicionales, las instrucciones de salto
y los llamados a subrutina; los primeros producen un incremento adicional del PC si se
cumple una condición específica, haciendo que el programa saltee sin ejecutar la instrucción
siguiente; los dos últimos permiten cargar en forma directa un valor constante en el PC,
haciendo que el programa salte a cualquier posición de la memoria de programa.
Palacios, Remiro, & López (2004) enseña también:

16
“Cuando el microcontrolador se conecta a la alimentación o cuando ocurre un reset, el
contador de programa se pone a cero forzando así que la dirección de inicio sea la 000h.
La primera instrucción ejecutada será la que esté grabada en esta posición” (Pág. 39).
Tabla 2
Direccionamiento en la memoria de programa a través del PC
Fuente: (Propia)
1.12) Ciclo de máquina
El ciclo de instrucción o ciclo de máquina equivale a cuatro ciclos de reloj, ya que se
requieren cuatro ciclos de reloj para llevar a cabo la ejecución de una instrucción.
Tabla 3
Tabla de equivalencias
Ciclo de Reloj Ciclo de Instrucción
𝑇𝐶𝐿𝐾 𝑇𝐶𝑌
𝑇𝐶𝐿𝐾 = 1/𝐹𝑂𝑆𝐶
𝐹𝑂𝑆𝐶: Frecuencia de oscilación
𝑇𝐶𝑌 = 4 ∗ 𝑇𝐶𝐿𝐾
Equivalencias entre ciclos de reloj e instrucción (Elaboración propia)
DIRECCIÓN
DE MEMORIA PC
0x00 0x01
0x02 0x03
.
.
.
0xFC 0xFD
0xFE 0xFF

17
De esta manera, si un microcontrolador trabaja a una frecuencia de oscilación de 4 MHz,
el ciclo de instrucción (𝑇𝐶𝑌) será de 1 μs, es decir, cada instrucción emplea 1 μs para
ejecutarse; asimismo, el ciclo de reloj (𝑇𝐶𝐿𝐾) será de 250 ns.
Consecuentemente, podemos deducir lo siguiente con respecto al tiempo de ejecución
de una instrucción:
Instrucción Normal ≡ 1 ciclo de instrucción = 1*𝑇𝐶𝑌
Instrucción de Salto ≡ 2 ciclos de instrucción = 2*𝑇𝐶𝑌
1.13) Segmentación de memoria – Pipeline
Se aplica en la ejecución de las instrucciones y permite al procesador simultáneamente,
ejecutar una instrucción y buscar el código de la siguiente; todo esto en 4 pasos:
PASO 1: Incrementar el PC para ubicar la dirección de memoria de programa.
PASO 2: Buscar el código de la instrucción en la dirección de memoria, previamente
ubicada, para luego cargarlo en el Registro de Instrucciones.
PASO 3: Decodificar el código de la instrucción.
PASO 4: Ejecutar el código de la instrucción.
Estos cuatro pasos pueden a su vez resumirse en dos, de los cuales, los dos primeros
forman el proceso de BÚSQUEDA (de la siguiente instrucción) y los dos últimos el proceso
de EJECUCIÓN (de la instrucción actual).
Tabla 4
Segmentación de memoria
PROGRAMA CICLO 1 CICLO 2 CICLO 3 CICLO 4
INSTRUCCIÓN 1 BÚSQUEDA 1 EJECUTA 1 INSTRUCCIÓN 2 BÚSQUEDA 2 EJECUTA 2 INSTRUCCIÓN 3 BÚSQUEDA 3 EJECUTA 3 INSTRUCCIÓN 4 BÚSQUEDA 4 Funcionamiento del PIPELINE (Elaboración propia)

18
1.14) Pila o stack de un microcontrolador
El STACK es una memoria interna dedicada, de tamaño limitado, separada de las
memorias de datos y de programa, inaccesible al programador, y organizada en forma de
pila que es utilizada solamente, y en forma automática, para guardar las direcciones de
retorno de subrutinas e interrupciones.
Cada posición es de 11 bits y permite guardar una copia completa del PC.
Los datos son accedidos de manera tal que el primero que entra es el último que sale.
En los PIC de gama baja el STACK es de 2 niveles, es decir, se pueden anidar hasta dos
niveles de subrutinas; esto implica que, después de ser llamada la primera subrutina, dentro
de esta se puede llamar a una segunda, pero dentro de esta última no podrá llamarse a una
tercera ya que ocurriría un desbordamiento de pila, es decir, al almacenar la dirección de la
tercera subrutina se perderá la dirección de la primera en vista de que la estructura de datos
de la pila del microcontrolador es de tipo LIFO (Last In First Out – Primero en Entrar
Último en Salir).
1.15) Ejemplo de llamado y retorno de subrutina
Una subrutina (también llamada función o subprograma) es una porción de código dentro
del programa principal, que realiza una tarea específica y es relativamente independiente del
resto del código.
En ASSEMBLER, el programa principal al llamar a una subrutina queda dormido hasta
que la subrutina termine, ya que al realizarse la llamada a una subrutina, automáticamente
se guarda en el nivel adecuado de la pila la dirección de la instrucción actual, de modo que,
al retornar de la subrutina, continúe la ejecución del programa desde donde fue llamada la
subrutina.

19
Fuente: (Ruggiero, 2011, pág. 6)
1.16) Sistema de interrupciones
Al aparecer una petición de interrupción, lo primero que hace el microcontrolador es
ejecutar la instrucción actual después de que se detiene el proceso de ejecución de programa.
Como resultado, la dirección de memoria de programa actual se apila automáticamente y
la dirección por defecto (predefinida por el fabricante) se escribe en el Contador de Programa
(PC). La localidad en la que el programa continúa con la ejecución se denomina vector de
interrupción. En el caso del microcontrolador PIC16FXXX esta dirección es 0x0004h.
Como se muestra en la Figura 8, la localidad que contiene el vector de interrupción se
omite durante la ejecución del programa regular. Una parte del programa que se ejecutará al
hacer una petición de interrupción se denomina rutina de interrupción; su primera
instrucción se encuentra en el vector de interrupción. Cuánto tiempo tardará en ejecutarse
esta subrutina y cómo será, depende de la destreza del programador, así como de la fuente
de interrupción.
Consecuentemente, la primera parte de la rutina de interrupción consiste en detectar la
fuente de interrupción; por fin, al reconocer la fuente de interrupción y al terminar de ejecutar
Figura 7 Ejemplo de llamado y retorno de subrutina

20
la rutina de interrupción, el microcontrolador alcanza la instrucción RETFIE, toma la
dirección de la pila y continúa con la ejecución del programa regular desde donde se
interrumpió.
Fuente: (MikroElecktronika, 2015)
1.17) Microcontroladores PIC16FXXX
A continuación, se citan las principales características de tres microcontroladores
PIC16FXXX; la siguiente información ha sido tomada de las hojas de datos de los
dispositivos, proporcionada por Microchip, fabricante de los mismos:
Tabla 5
Tabla de Características
Característica PIC16F628A PIC16F873A PIC16F877A
Versión PDIP: Número
de pines
18 pines 28 pines 40 pines
Puertos 2 3 5
Pines de E/S 16 22 33
Figura 8 Proceso de una interrupción

21
Característica PIC16F628A PIC16F873A PIC16F877A
Frecuencia máxima de
operación
20 MHz 20 MHz 20 MHz
Precisión del oscilador
RC interno
4 MHz ± 1% No tiene No tiene
Bancos internos de
memoria
4 4 4
Capacidad de cada
banco de memoria
128 bytes 128 bytes 128 bytes
Número de bits del PC 13 bits 13 bits 13 bits
Capacidad de memoria
de programa FLASH
2048 palabras por
14 bits
4096 palabras por
14 bits
8192 palabras por
14 bits
Capacidad de memoria
de datos SRAM
224 bytes 192 bytes 368 bytes
Capacidad de EEPROM
interna
128 bytes, hasta un
millón de ciclos de
lectura/escritura
192 bytes, hasta un
millón de ciclos de
lectura/escritura
256 bytes, hasta
un millón de
ciclos de
lectura/escritura
Capacidad de retención
de la EEPROM interna
> 40 años > 40 años > 40 años
Interrupciones
disponibles
10 14 15
TIMERS
2 (8 bits)
1 (16 bits)
2 (8 bits)
1 (16 bits)
2 (8 bits)
1 (16 bits)
Módulos CCP (PWM) 1 2 2

22
Característica PIC16F628A PIC16F873A PIC16F877A
Módulo USART 1 1 1
Canales analógicos 4 5 8
Módulo MSSP (SPI e
I2C)
No tiene 1 1
Comparadores
analógicos
2 2 2
Referencias de voltaje
interno
Sí Sí Sí
Módulo ADC No tiene 1 1
Resolución del ADC No tiene 10 bits 10 bits
Voltaje de operación 2V – 5.5V 2V – 5.5V 2V – 5.5V
Máxima corriente por
pin de E/S (modo
sumidero)
25 mA 25 mA 25 mA
Máxima corriente por
pin de E/S (modo
fuente)
25 mA 25 mA 25 mA
Disipación de potencia
total
800 mW 1 W 1 W
Voltaje de Brown-Out
Reset
Mínimo: 3.65 V
Típico: 4V
Máximo: 4.35 V
Mínimo: 3.65 V
Típico: 4V
Máximo: 4.35 V
Mínimo: 3.65 V
Típico: 4V
Máximo: 4.35 V

23
Característica PIC16F628A PIC16F873A PIC16F877A
Compatible con
comunicaciones
paralelas (PSP)
No No Sí
Consumo de energía Bajo Bajo Bajo
Protección de código
programable Sí Sí Sí
Temperatura de
almacenamiento
-65 °C a +150 °C -65 °C a +150 °C -65 °C a +150 °C
Corriente máxima en el
pin VDD
250 mA 250 mA 250 Ma
Características de 3 µC PIC16FXXX – Gama Media (Elaboración propia)
Fuente: (Microchip, PIC16F627A/628A/648A Data Sheet, 2007, pág. 2)
Figura 9 Diagrama de Pines del PIC16F628A
24
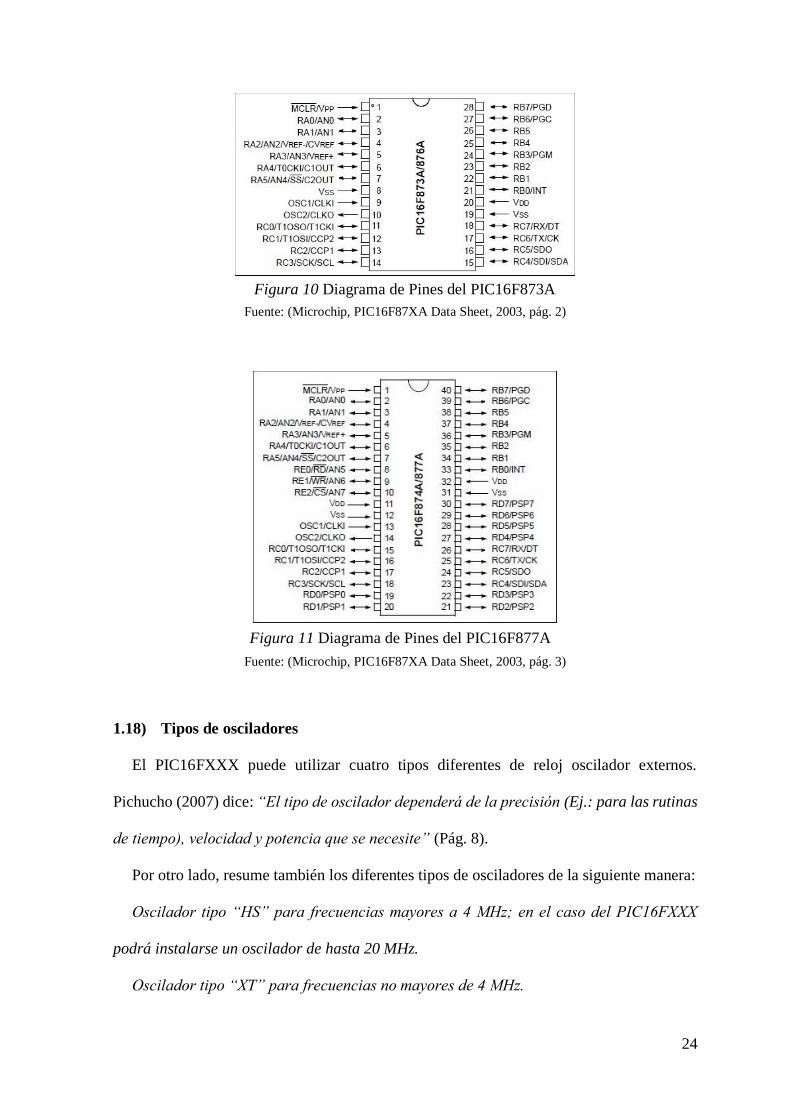
Fuente: (Microchip, PIC16F87XA Data Sheet, 2003, pág. 2)
Fuente: (Microchip, PIC16F87XA Data Sheet, 2003, pág. 3)
1.18) Tipos de osciladores
El PIC16FXXX puede utilizar cuatro tipos diferentes de reloj oscilador externos.
Pichucho (2007) dice: “El tipo de oscilador dependerá de la precisión (Ej.: para las rutinas
de tiempo), velocidad y potencia que se necesite” (Pág. 8).
Por otro lado, resume también los diferentes tipos de osciladores de la siguiente manera:
Oscilador tipo “HS” para frecuencias mayores a 4 MHz; en el caso del PIC16FXXX
podrá instalarse un oscilador de hasta 20 MHz.
Oscilador tipo “XT” para frecuencias no mayores de 4 MHz.
Figura 10 Diagrama de Pines del PIC16F873A
Figura 11 Diagrama de Pines del PIC16F877A
25
Oscilador tipo “LP” para frecuencias entre 32 y 200 KHz.
Oscilador tipo “RC” para frecuencias no mayores de 5.5 MHz.
Luego, para programar un microcontrolador debe especificarse el tipo de oscilador que
se va a utilizar, de esta manera, si la frecuencia de trabajo es de 10 MHz la configuración del
oscilador deberá estar en “HS”; pero si la frecuencia de trabajo es de 4 MHz entonces la
configuración del oscilador deberá estar en “XT”.
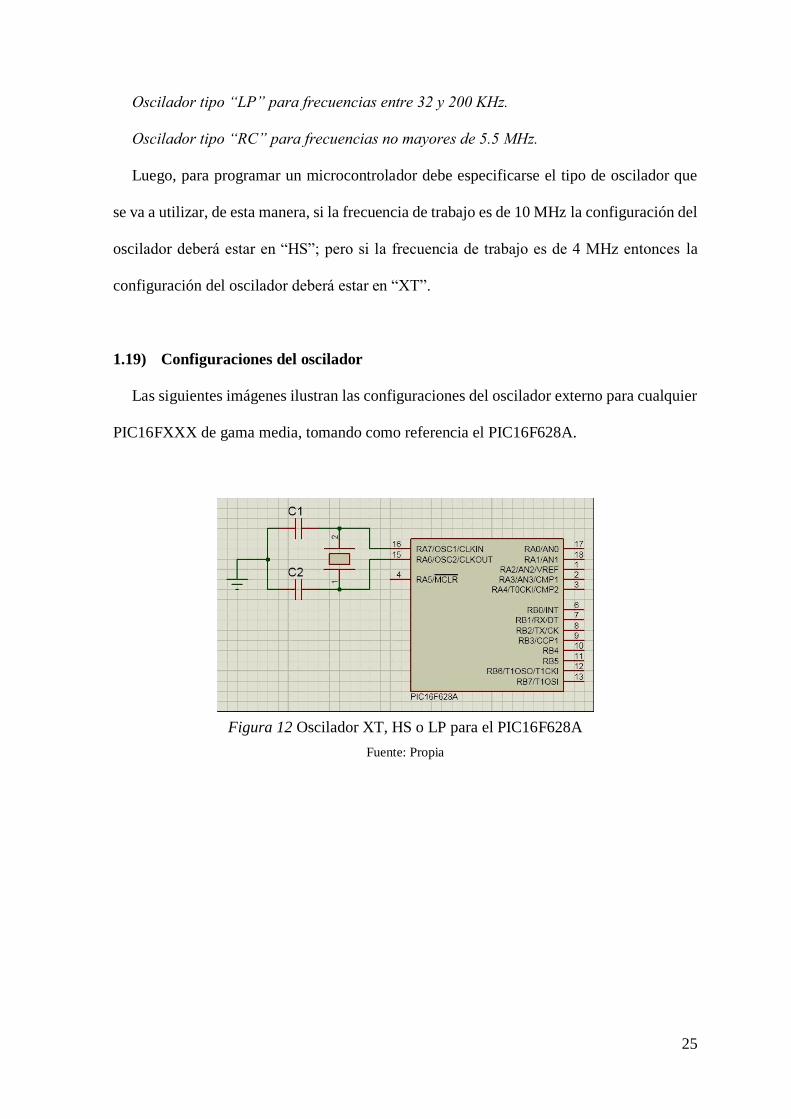
1.19) Configuraciones del oscilador
Las siguientes imágenes ilustran las configuraciones del oscilador externo para cualquier
PIC16FXXX de gama media, tomando como referencia el PIC16F628A.
Fuente: Propia
Figura 12 Oscilador XT, HS o LP para el PIC16F628A

26
5 KΩ ≤ R ≤ 100 KΩ
C ≥ 20 pF
Fuente: Propia
1.20) Modulación PWM
PWM es un tipo de señal periódica de voltaje, cuadrada o sinusoidal, utilizada para enviar
información o para modificar la cantidad de energía que se envía a una carga; sin embargo,
dicha señal resulta modificable en el ciclo de trabajo (tiempo en el cual permanece en estado
alto), mas no en su amplitud. Asimismo, la unidad de medida de esta variación se especifica
en porcentaje, por ello, la expresión matemática de una PWM es:
𝐷 =𝑃𝑖
𝑇∗ 100%
Donde:
𝐷 = ciclo de trabajo
𝑃𝑖 = Tiempo en que la señal es positiva
𝑇 = Periodo
Consecuentemente, si el ciclo de trabajo de una onda cuadrada es del 25% significa que
el 25% del periodo estará en estado alto y el 75% en estado bajo.
Figura 13 Oscilador tipo RC

27
Fuente: (Elaboración propia)
1.21) Comunicación serial
La comunicación serial implica transmitir datos, bit a bit, a través de una única línea, esto
la hace más lenta que la comunicación paralela, sin embargo, esta última implica un elevado
número de cables según el ancho del dato ya que se destina un cable para cada bit, lo cual
dificultaría la transmisión de datos a largas distancias si tenemos en cuenta la capacitancia
de los cables y el tamaño de los datos.
Por otro lado, la comunicación serial al utilizar un único cable permite la transmisión de
datos, sea cual sea el tamaño de los mismos, a distancias muy grandes; Reyes (2008) afirma:
“(…) en la norma RS232 a 15 metros, en la norma RS422/485 a 1200 metros y utilizando
un MODEM, a cualquier parte del mundo” (Pág. 137).
Comunicación serial asíncrona
Necesita solo una línea para la comunicación, la de los datos, de manera tal que para la
validación de los mismos emplea mecanismos como referencia tierra (RS232) o voltajes
diferenciales (RS422/485).
Figura 14 Ejemplo de Señal PWM con Duty Cicle al 30%

28
Respecto a la velocidad de transmisión de datos, Reyes (2008) explica: “(…) la duración
de cada bit es determinada por la velocidad de transmisión de datos que se debe definir
previamente entre ambos equipos” (Pág. 137).
Comunicación serial síncrona
Reyes (2008) explica: “Además de la línea para la transmisión de datos, necesita otra
línea que contenga los pulsos de reloj, estos a su vez indican cuándo un dato es válido”
(Pág. 137).
1.22) Modos de transmisión de datos
Simplex
La comunicación ocurre en un solo sentido, o se transmite o se recibe, pero no se pueden
hacer las dos cosas a la vez. Reyes (2008) dice: “(…) un ejemplo claro es la radiodifusión,
en donde la estación es el transmisor y los radios son los receptores” (Pág. 127).
Half – Duplex
La comunicación se produce en ambos sentidos, es decir, una estación puede transmitir y
recibir, pero no simultáneamente. Reyes (2008) expone: “(…) un ejemplo son los llamados
radios WALKING TALKING, en donde un operador presiona el botón y habla, luego suelta
el botón y el otro usuario presiona el botón para contestar” (Pág. 127).
29
Full – Duplex
La comunicación se produce en ambos sentidos simultáneamente, pero solo entre dos
estaciones, una transmisora y otra receptora. Reyes (2008) afirma: “(…) un ejemplo es la
telefonía móvil” (Pág. 127).
Full/Full – Duplex
La comunicación ocurre en ambos sentidos simultáneamente, no obstante, entre una
estación transmisora/receptora y diversas estaciones también transmisoras/receptoras, al
mismo tiempo. Reyes (2008) afirma: “Esta transmisión se utiliza casi exclusivamente con
circuitos de comunicación de datos” (Pág. 127).
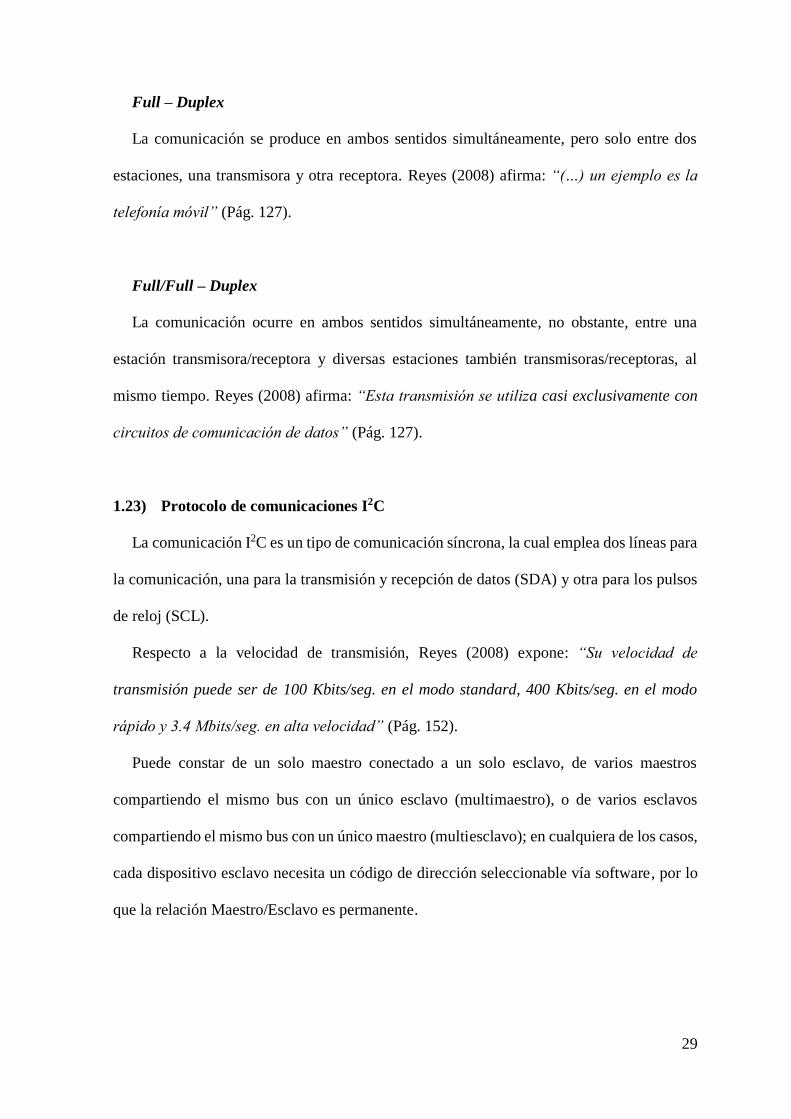
1.23) Protocolo de comunicaciones I2C
La comunicación I2C es un tipo de comunicación síncrona, la cual emplea dos líneas para
la comunicación, una para la transmisión y recepción de datos (SDA) y otra para los pulsos
de reloj (SCL).
Respecto a la velocidad de transmisión, Reyes (2008) expone: “Su velocidad de
transmisión puede ser de 100 Kbits/seg. en el modo standard, 400 Kbits/seg. en el modo
rápido y 3.4 Mbits/seg. en alta velocidad” (Pág. 152).
Puede constar de un solo maestro conectado a un solo esclavo, de varios maestros
compartiendo el mismo bus con un único esclavo (multimaestro), o de varios esclavos
compartiendo el mismo bus con un único maestro (multiesclavo); en cualquiera de los casos,
cada dispositivo esclavo necesita un código de dirección seleccionable vía software, por lo
que la relación Maestro/Esclavo es permanente.

30
Fuente: (Reyes, 2008, pág. 153)
Tabla de capacidades de EEPROM I2C 24Cxx (Reyes, 2008, pág. 152)
1.24) Protocolo de comunicaciones SPI
SPI (Serial Peripherical Interface – Interfaz Periférica Serial) es un tipo de comunicación
serial síncrona FULL DUPLEX, es decir, la comunicación entre el maestro y un esclavo
ocurre en ambos sentidos simultáneamente, siendo el maestro el dispositivo que controla el
bus e inicia la comunicación, y el esclavo es el dispositivo direccionado.
Figura 15 Esquema de comunicación I2C con una EEPROM 24C04
Tabla 6
Tabla de capacidades

31
Fuente: (López, 2011, pág. 2)
A diferencia de la comunicación I2C, en la cual un esclavo es seleccionado por medio de
un código de direccionamiento, en la comunicación SPI un esclavo es direccionado por
medio de una línea selectora Chip Select o Select Slave, donde cada una de estas líneas es
dedicada para cada esclavo; de esta manera, las líneas para el intercambio de datos se
denominan SDO (los datos van del Maestro hacia el Esclavo), SDI (los datos van del Esclavo
hacia el Maestro) y la línea de reloj SCK.
Cabe resaltar además que, los paquetes transmitidos son de 8 bits, y a diferencia de la
comunicación I2C, en la comunicación SPI pueden existir muchos esclavos, pero solo puede
haber un maestro.
1.25) Protocolo de comunicaciones Bluetooth
El estándar Bluetooth es una norma abierta, cuya ventaja es que posibilita la conexión
inalámbrica de corto alcance de voz y datos entre ordenadores, portátiles, agendas digitales
personales, teléfonos móviles, impresoras, escáneres, cámaras digitales e incluso
dispositivos de casa, a través de una banda disponible a nivel global (2.4 GHz).
Figura 16 Diagrama de conexiones del bus SPI – Modo multiesclavo

32
Principales objetivos
- Facilitar las comunicaciones entre equipos móviles y fijos.
- Eliminar cables y conectores entre estos.
- Posibilitar la creación de pequeñas redes inalámbricas facilitando la sincronización
de datos entre nuestros equipos personales.
No obstante, Bluetooth está diseñado especialmente para dispositivos de bajo consumo,
con una cobertura baja y basada en transceptores de bajo coste, por ello, este protocolo
permite la comunicación entre dispositivos siempre y cuando estén dentro de un determinado
alcance, ya que las comunicaciones se realizan por radiofrecuencia.
Asimismo, los dispositivos no necesitan alinearse, de modo que pueden estar en
habitaciones separadas si la potencia de transmisión lo permite.
Clasificación del Bluetooth
Los dispositivos Bluetooth se clasifican, según la potencia de transmisión y
compatibilidad entre clases diversas en: Clase 1, Clase 2 y Clase 3.
Asimismo, el ancho de banda es la cantidad de bits que pueden transmitirse en un segundo
(bits/s), unidad de medida conocida también como Baudio; de este modo, 9600 Baudios
significan 9600 bits/s.
Clasificación del Bluetooth (Franco & Montesdeoca, 2014, pág. 27)
Tabla 7
Tabla de clasificación del Bluetooth

33
En la tecnología Bluetooth, cada versión de este protocolo tiene un ancho de banda
distinto.
Clasificación del Bluetooth según el ancho de banda (Franco & Montesdeoca, 2014, pág. 27)
1.26) Protocolo de comunicaciones RS232
El protocolo de comunicaciones RS232 permite la comunicación serial asíncrona entre
dos dispositivos a distancias mayores de 2 metros; sin embargo, a fin de que la lectura de
datos sea correcta, ambos equipos deben ser configurados previamente a la misma velocidad
y demás parámetros.
Los niveles de voltaje están establecidos de la siguiente manera: para señal “1” lógica,
–5V a –15V en el transmisor y –3V a –25V en el receptor, mientras que, para señal “0”
lógica, +5V a +15V en el transmisor y +3V a +25V en el receptor.
En la Figura 17 se muestra el esquema de un dato enviado serialmente a 2400, 8N1 (2400
bits/s, sin paridad, 8 bits de dato y bit de parada), correspondiente al número 68, carácter
ASCII de “D” (B'01000100'), el tiempo de un bit es de 416 µs, así que el receptor revisa el
bit de arranque después de 208 µs, y luego cada 416 µs.
Tabla 8
Tabla de velocidades

34
Fuente: (Reyes, 2008, pág. 128)
Respecto a la Figura 17, Reyes (2008) explica:
“(…) la señal permanece en un nivel lógico alto mientras no realiza ninguna
transferencia de datos. Para empezar a transmitir datos el transmisor coloca la línea en
nivel bajo durante el tiempo de un bit (416 μs para 2400 bits/s), este se llama el bit de
arranque, a continuación, empieza a transmitir con el mismo intervalo de tiempo los bits de
datos, que pueden ser de 7 u 8 bits, comenzando por los bits menos significativos y
terminando por los más significativos. Al final de la transmisión de datos se envía el bit de
paridad, si estuviera activa esta opción y por último los bits de parada, que pueden ser 1 o
2, después de esto la línea vuelve a un estado lógico alto, y el transmisor está listo para
enviar el siguiente dato” (Pág. 128).
En la Figura 18 se presenta un esquema de comunicación serial usando la norma RS232;
el dato enviado es el mismo que el de la Figura 17, con la diferencia que la lógica es inversa;
de esta manera, 1 equivale a -10V y 0 a +10V.
Figura 17 Ejemplo de comunicación serial sin paridad

35
Fuente: (Reyes, 2008, pág. 129)
1.27) Protocolo de comunicaciones 1 – wire
La comunicación de una línea es de tipo serial asíncrona, en la cual el bus de 1 línea
(1–Wire Bus), ideado por Dallas Semiconductors, permite la transmisión de información a
través de un único cable.
La forma común de conexión es la siguiente:
- Un maestro, que suele ser un microcontrolador, lleva el control del bus.
- Uno o más esclavos envían información y son gobernados por el maestro.
En vista de que puede haber varios dispositivos esclavos conectados al bus, la línea de
transmisión es en drenador abierto, esto permite a cada dispositivo conectado al bus, cederlo
cuando no exista una transmisión en curso, haciendo posible que el bus sea usado por otros
dispositivos.
Asimismo, se requiere de una resistencia de Pull-Up de al menos 4.7 KΩ; de esta manera,
el estado de reposo del bus será el nivel alto, resultando similar al protocolo de red Ethernet,
en el cual los dispositivos pueden energizarse, ya sea mediante una línea dedicada para la
tensión positiva (VCC) o bien por medio del bus, y en este último caso se necesitarán tan
Figura 18 Esquema de comunicación serial usando la norma RS232

36
solo dos cables, uno para la tensión negativa (GND) y otro para los datos, lo cual representa
una ventaja a nivel de hardware.
La desventaja de este protocolo es que es de baja velocidad.
Fuente: (Elaboración propia)
1.28) Señal analógica
Es un tipo de señal continua en el tiempo, de esta manera, en función del tiempo resultan
variables su periodo y su amplitud; generalmente son producidas por un fenómeno electro-
magnético y se representan mediante una función matemática.
Fuente: (Elaboración Propia – Matlab)
Figura 19 Bus de comunicación 1–Wire
Figura 20 Ejemplo de señal analógica

37
Un ejemplo de este tipo de señales son la tensión y corriente alternas, la temperatura, la
presión, el sonido, la intensidad de luz, etc.
1.29) Conversión analógica digital
Consiste en transcribir señales analógicas en digitales, con el propósito de facilitar su
procesamiento (codificación, compresión, etc.) y hacer la señal resultante (digital) más
inmune al ruido y otras interferencias a las que son más sensibles las señales analógicas.
Un requisito fundamental para llevar a cabo la conversión analógica digital es el Teorema
de Nyquist, el cual indica que la frecuencia de muestreo debe ser igual o mayor al doble de
la frecuencia de la señal analógica original.
De esta manera, 𝐹𝑆 ≥ 2 ∗ 𝐵𝑊, donde 𝐹𝑆 es la frecuencia de muestreo, mientras que 𝐵𝑊 es
el ancho de banda de la señal original, el cual se define como la diferencia entre la frecuencia
del más alto de sus armónicos y el más bajo, es decir: 𝐵𝑊 = 𝑓𝑚𝑎𝑥 − 𝑓𝑚𝑖𝑛.
Asimismo, otro parámetro importante derivado de 𝐹𝑆 es 𝑇𝑆, el periodo de muestreo, ya
que 𝑇𝑆 = 1/𝐹𝑆, este parámetro indica cada qué tiempo se muestrea la señal; por ello,
mientras más alta sea 𝐹𝑆, más bajo será 𝑇𝑆 y viceversa.
Fuente: (MUESTREO Y CONVERSIÓN ANALÓGICA DIGITAL, s.f.)
Figura 21 Señal analógica muestreada como paso previo a su tratamiento digital

38
Por último, una 𝐹𝑆 más alta no significa que 𝐵𝑊 deba ser también más alto, por el
contrario, mientras 𝐹𝑆 no se limite específicamente al doble de 𝐵𝑊, sino que sea incluso el
triple de 𝐵𝑊, se obtendrá un mayor rango de valores discretos para la señal analógica original
debido a que 𝑇𝑆 será más bajo.
Consecuentemente, un mayor número de muestras es la mejor garantía que encontraremos
para poder recuperar la señal original a partir de las muestras; sin embargo, tener una
frecuencia de muestreo (𝐹𝑆) relativamente alta puede generar un volumen de información
excesiva para nuestros intereses, es decir, demasiadas muestras a tratar.
1.30) Conversión digital analógica
Es el proceso inverso a la conversión analógica digital, y consiste en tomar muestras en
formato digital (valores discretos) y convertirlas en una señal analógica (valores continuos),
para ello, cada valor binario es asociado por un ADC a un nivel de tensión preestablecido,
de modo tal que genera muestras de tensión utilizando dichos niveles y aplicando un
intervalo de tiempo constante entre muestras; para ello, se une cada muestra con la que le
sucede, ya que dicha unión es necesaria para que la señal vuelva a ser continua en el tiempo.
Fuente: (Niple Blog, 2018)
Figura 22 Red de resistencias en escalera para un DAC

39
1.31) Tipos de muestreo para encuestas
Muestreo probabilístico: Según lo expone (Universo Formulas, s.f.), se denomina
también muestreo aleatorio, y es la técnica de elección de la muestra en la que los
individuos son elegidos aleatoriamente y todos tienen probabilidad positiva de formar
parte de ella; asimismo, las muestras seleccionadas por métodos de muestreo
probabilístico son más representativas que los métodos de muestreo no probabilístico,
sin embargo, no siempre es posible seleccionar las muestras aleatoriamente.
Fuente: (Universo Formulas, s.f.)
Muestreo no probabilístico o no aleatorio: Los elementos son elegidos a juicio del
investigador y no se conoce la probabilidad con la que se puede seleccionar a cada
individuo; por ende, el muestreo no probabilístico se utiliza cuando es imposible o muy
difícil obtener la muestra por métodos de muestreo probabilístico.
(Universo Formulas, s.f.) explica: “Las muestras seleccionadas por métodos de muestreo
no probabilísticos intentan ser representativas bajo los criterios del investigador, sin
Figura 23 Muestreo probabilístico o aleatorio

40
embargo, de ninguna manera garantizan la representatividad, ya que de inicio no se
conoce a todos los sujetos y estos tendrán probabilidad cero de estar en la muestra”.
Fuente: (Universo Formulas, s.f.)
1.32) Muestreos no probabilísticos
Muestreo por cuotas: Se basa en seleccionar la muestra después de dividir la población
en grupos o estratos. Los sujetos dentro de cada grupo se eligen por métodos no
probabilísticos.
Muestreo de bola de nieve o muestreo por referidos: Se realiza
sobre poblaciones donde no se conoce a sus individuos o es muy difícil acceder a ellos.
Se llama muestreo de bola de nieve porque cada sujeto estudiado propone a otros,
produciendo un efecto acumulativo parecido a una bola de nieve.
Muestreo por conveniencia: Consiste en seleccionar a los individuos que convienen al
investigador para la muestra. Esta conveniencia se produce porque al investigador le
resulta más fácil examinar a estos sujetos, ya sea por proximidad geográfica, por ser sus
amigos, etc.
Figura 24 Muestreo no probabilístico o no aleatorio

41
Fuente: (Universo Formulas, s.f.)
Muestreo casual o accidental: Los individuos son elegidos de manera casual, sin ningún
juicio previo. Las personas que realizan el estudio eligen un lugar o un medio, y desde
ahí realizan el estudio a los individuos de la población que accidentalmente se encuentren
a su disposición.
Muestreo discrecional o muestreo por juicio: Los sujetos se seleccionan en base al
conocimiento y juicio del investigador. El investigador selecciona a los individuos a
través de su criterio profesional. Puede basarse en la experiencia de otros estudios
anteriores o en su conocimiento sobre la población y el comportamiento de ésta frente a
las características que se estudian.
Figura 25 Muestreo no probabilístico por conveniencia

42
CAPÍTULO II: DISEÑO METODOLÓGICO
En este capítulo, se presentan los planos correspondientes a la infraestructura de la tarjeta
entrenadora. Nuestra herramienta informática para el diseño de la tarjeta entrenadora fue la
versión 7.6.0 del programa EAGLE, un software de CAD electrónico bastante utilizado en
la Ingeniería Electrónica, ya que le permite al diseñador tener mayor libertad y control de la
arquitectura de su proyecto, respecto a la posición de los dispositivos, el tamaño de las
leyendas, el acabado de las pistas, etc. La desventaja de este programa es el tiempo que le
demanda al usuario, el diseño de su proyecto, dependiendo del tamaño del mismo.
Por otro lado, la Tarjeta Entrenadora FACFYM se basa en un conjunto de etapas o
módulos embebidos, algunos para la inserción y/o acoplamiento inmediato de otros
módulos; la mayoría de etapas son de diseño propio, otras están basadas en diversas fuentes
de información y adaptadas a la infraestructura de la tarjeta, previamente probadas en una
protoboard a fin de ajustar los valores y/o características de algunos componentes, por ello,
cabe mencionar que las imágenes mostradas en este capítulo son de fuente propia.
Por último, la arquitectura de la Tarjeta Entrenadora FACFYM, además del aporte
científico de los investigadores involucrados en el estudio de la problemática que los motivó
para el desarrollo de este proyecto, está basada en las opiniones y necesidades de los
estudiantes de Ingeniería Electrónica, ya que por medio de la colaboración de una muestra
de ellos mediante las encuestas pertinentes, se tomaron las decisiones adecuadas acerca de
qué etapas debían incluirse en la tarjeta y qué etapas no, para luego proceder a diseñarla.

43
2.1) Panel de control del software EAGLE 7.6.0
Este software fue nuestra herramienta informática para el diseño de la tarjeta entrenadora;
puede ser descargado desde el sitio web oficial de AUTODESK para dicha versión de
EAGLE: http://eagle.autodesk.com/eagle/software-versions/2.
2.2) Diagrama esquemático del software EAGLE 7.6.0
Aquí se diseña el circuito como tal, insertando y conectando los componentes.
Figura 26 Panel de Control del software EAGLE 7.6.0
Figura 27 Diagrama esquemático de la Tarjeta Entrenadora FACFYM

44
2.3) Diagrama PCB del software EAGLE 7.6.0
En este entorno se agregan automática y simultáneamente, según el diagrama
esquemático, los componentes reales en 2D que conforman el proyecto; sin embargo, se
agregan de manera desordenada, por ello se recomienda que los componentes y conexiones
en esta ventana, el usuario los ordene al tiempo que diseña.
Figura 28 Diagrama PCB de la Tarjeta Entrenadora FACFYM

45
2.4) Módulo PICkit 2 Clone
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la verificación de resultados para
diversas aplicaciones desarrolladas con tres microcontroladores PIC16FXXX de gama
media de Microchip, ya que con este módulo podrá grabar los códigos de programación
en el microcontrolador PIC16FXXX correspondiente, una vez concluya su aplicación.
Este diseño no es de autoría propia, fue tomado de (INVENTABLE.eu, 2013).
Si bien Microchip ha lanzado ya las versiones 3 y 4 de PICkit, para este trabajo de
investigación se optó por la versión 2 por las siguientes razones:
Figura 29 Módulo PICkit 2 Clone – Esquemático
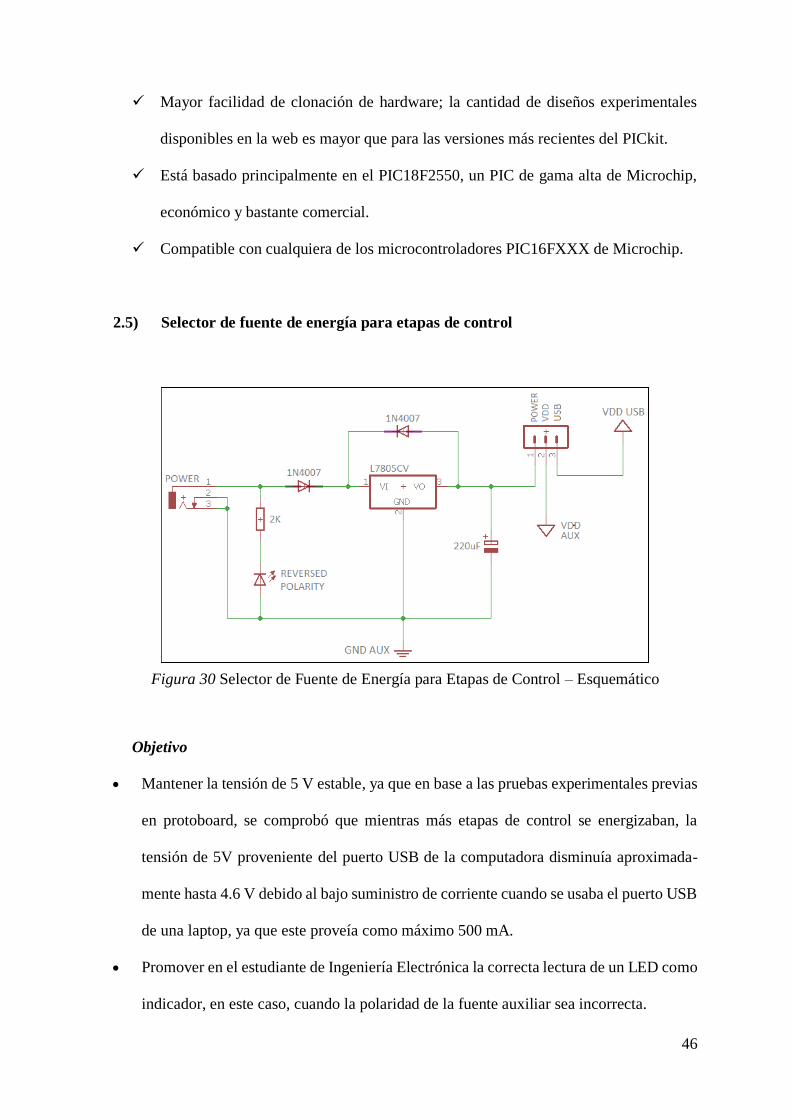
46
Mayor facilidad de clonación de hardware; la cantidad de diseños experimentales
disponibles en la web es mayor que para las versiones más recientes del PICkit.
Está basado principalmente en el PIC18F2550, un PIC de gama alta de Microchip,
económico y bastante comercial.
Compatible con cualquiera de los microcontroladores PIC16FXXX de Microchip.
2.5) Selector de fuente de energía para etapas de control
Objetivo
Mantener la tensión de 5 V estable, ya que en base a las pruebas experimentales previas
en protoboard, se comprobó que mientras más etapas de control se energizaban, la
tensión de 5V proveniente del puerto USB de la computadora disminuía aproximada-
mente hasta 4.6 V debido al bajo suministro de corriente cuando se usaba el puerto USB
de una laptop, ya que este proveía como máximo 500 mA.
Promover en el estudiante de Ingeniería Electrónica la correcta lectura de un LED como
indicador, en este caso, cuando la polaridad de la fuente auxiliar sea incorrecta.
Figura 30 Selector de Fuente de Energía para Etapas de Control – Esquemático

47
Fomentar en el estudiante de Ingeniería Electrónica la precaución que debe asumir al
conmutar manualmente un circuito electrónico; asimismo, que sea capaz de analizar
cuándo debe utilizar una de las dos fuentes de energía para las etapas de control de la
tarjeta entrenadora FACFYM.
2.6) Protección contra cortocircuito para etapas de control
Objetivo
Proteger, tanto las etapas de control de la tarjeta entrenadora FACFYM, como la fuente
de alimentación utilizada para energizarlas.
Acostumbrar al estudiante de Ingeniería Electrónica a regular y/o calibrar parámetros
básicos como corriente y voltaje en tiempos relativamente pequeños; de esta manera, se
incrementa además la habilidad del estudiante en el uso de instrumentos de medición.
Ensayar cortocircuitos intencionales, de tal manera que el estudiante de Ingeniería
Electrónica compruebe la importancia de este tipo de etapas en el diseño de un circuito
Figura 31 Protección contra Cortocircuito para Etapas de Control – Esquemático

48
eléctrico y/o electrónico, teniéndola en cuenta para el diseño de sus propios circuitos
electrónicos a largo plazo.
2.7) Grabador de microcontrolador PIC12FXXX
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la grabación de un microcontrolador
PIC de gama media serie 12FXXX mediante un circuito sencillo y eficaz, ya que se
requiere un circuito especial para grabar este tipo de PIC; asimismo, el estudiante debe
tener presente que este módulo solo es para grabar y/o leer, no para entrenar.
Fomentar en el estudiante de Ingeniería Electrónica la precaución para insertar y/o
extraer un chip de tipo PDIP de un zócalo del mismo tipo, una vez que haya realizado
la tarea correspondiente.
Figura 32 Grabador de Microcontrolador PIC12FXXX – Esquemático

49
2.8) Módulo de grabación de EEPROM I2C
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la grabación de memorias EEPROM
I2C serie 24C/LCXX mediante el módulo PICkit 2 Clone embebido también en la
Tarjeta Entrenadora FACFYM y el software PICkit 2 Programmer.
Concientizar al estudiante de Ingeniería Electrónica en el uso de memorias EEPROM,
especialmente al momento de manipularlas con las yemas de los dedos, ya que este tipo
de dispositivos son sensibles a las descargas electrostáticas, por lo que el estudiante
deberá asegurarse de haberse descargado él y su entorno antes de manipular el chip.
Incrementar en el alumno la capacidad de identificar módulos embebidos en una tarjeta
de circuitos electrónicos mediante su respectiva descripción proporcionada en el manual
de instrucciones del producto; así como a través de diversas leyendas registradas en
dicha plataforma.
Forjar en el estudiante de Ingeniería Electrónica la precaución para insertar y/o extraer
un chip de tipo PDIP, una vez que haya realizado la tarea correspondiente.
Figura 33 Módulo de Grabación de EEPROM I2C – Esquemático

50
2.9) Entrenador de microcontroladores PIC16FXXX de 18 pines
Figura 34 Entrenador de µC PIC16FXXX de 18 Pines – Esquemático

51
2.10) Entrenador de microcontroladores PIC16FXXX de 28 pines
Figura 35 Entrenador de µC PIC16FXXX de 28 Pines – Esquemático

52
2.11) Entrenador de microcontroladores PIC16FXXX de 40 pines
Figura 36 Entrenador de µC PIC16FXXX de 40 Pines – Esquemático

53
2.12) Objetivo de los tres microcontroladores PIC16FXXX
Educar al estudiante de Ingeniería Electrónica en el uso de microcontroladores
PIC16FXXX de Microchip para el desarrollo de diversas aplicaciones partiendo de
su vasta comercialización en el mercado peruano, su accesibilidad económica y,
además, su sencilla programación en diversos lenguajes.
Involucrar hasta 3 microcontroladores PIC16FXXX para el diseño e implementación
de diversos sistemas digitales, limitados solo por la imaginación del estudiante de
Ingeniería Electrónica.
Mejorar el entrenamiento del estudiante de Ingeniería Electrónica, ya que contará
con recursos inmediatos para comprobar el alcance de su aplicación, a través de
etapas complementarias, por ejemplo, transmisión inalámbrica de datos.
Incentivar el trabajo grupal; al menos tres grupos en la misma plataforma ocupándose
cada grupo de una tarea diferente, de tal manera que haya coordinación entre todos
los usuarios, ya que dos grupos no podrán usar siempre un mismo módulo, entonces
entre todos deberán definir qué trabajo realizará cada uno, de tal manera que, lo hecho
por uno sea un buen complemento de lo que consiguió el otro, pudiendo converger
las diversas tareas en una más sofisticada.
Mejorar la habilidad del estudiante de Ingeniería Electrónica en la lectura e
interpretación de planos electrónicos, ya que durante sus primeras experiencias con
la Tarjeta Entrenadora FACFYM, deberá ubicar cada módulo en la plataforma según
lo describa el manual de instrucciones de la misma.
Brindarle al estudiante de Ingeniería Electrónica la posibilidad de elegir libremente
la frecuencia de trabajo para su aplicación mediante la inserción del cristal apropiado.
Forjar en el estudiante de Ingeniería Electrónica la precaución para insertar y/o
extraer un chip de tipo PDIP, una vez realizada la tarea respectiva.

54
2.13) Módulo de nueve diodos LED
Objetivo
Proporcionarle al estudiante de Ingeniería Electrónica la posibilidad de iniciarse en el
mundo de la programación a través de programas sencillos como encender un LED hasta
prototipos que puedan escalarse posteriormente a aplicaciones de mayor jerarquía como
un semáforo, razón por la cual los diodos LED fueron ordenados en forma de L.
Mejorar en el estudiante su habilidad para interpretar procesos a través de indicadores;
contará con nueve diodos LED, es decir, con nueve indicadores, razón por la cual se
optó por embeber diodos de diferentes colores en la tarjeta entrenadora.
Ejercite la creatividad del estudiante de Ingeniería Electrónica y no se eduque en la idea
errónea de que encender uno o varios LED, solo tiene carácter de ensayo poco
profesional.
Figura 37 Módulo de Nueve Diodos LED – Esquemático

55
2.14) Módulo de cinco pulsadores NO (Normally Open)
Objetivo
Posibilitarle al estudiante de Ingeniería Electrónica manipular una carga, iniciar y/o
detener un proceso al conmutar una señal digital externa de nivel alto a nivel bajo.
2.15) Módulo alarma GSM
Figura 38 Módulo de 5 Pulsadores NO (Normally Open) – Esquemático
Figura 39 Módulo Alarma GSM – Esquemático

56
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el diseño de un prototipo sencillo de
sistema de seguridad utilizando la tecnología GSM.
Utilizar un sensor magnético a fin de que el estudiante de Ingeniería Electrónica se
familiarice con el uso de algunos dispositivos industriales básicos.
El diseño de este módulo no es de autoría propia, y aunque se le hicieron algunos ajustes
antes de incluirlo en el hardware de la plataforma de entrenamiento, el diseño original
fue tomado de (EDRpaul, 2011).
2.16) Módulo LCD 16x2
Objetivo
Proporcionarle al estudiante de Ingeniería Electrónica una herramienta que le permita
visualizar mensajes o parámetros consecuentes de la culminación o desarrollo de un
proceso en tiempo real.
Figura 40 Módulo LCD 16x2 – Esquemático

57
Proporcionarle al estudiante de Ingeniería Electrónica una herramienta que le permita
visualizar los parámetros que ingrese externamente al microcontrolador (a través de un
teclado, por ejemplo) para iniciar el progreso de una tarea en función de dichos
parámetros; de esta manera, el estudiante será capaz de ejercer un mayor control sobre
su propia aplicación.
2.17) Módulo de dos potenciómetros
Objetivo
Proporcionarle al estudiante de Ingeniería Electrónica una herramienta que le permita
generar fácilmente diversos niveles de tensión en el rango de 0 a 5 V aproximadamente,
siempre que necesite realizar comparación de voltajes o lecturas con el ADC de un
PIC16FXXX, de modo que se ejecute una determinada tarea en base a dicho proceso.
Figura 41 Módulo de Dos Potenciómetros – Esquemático

58
2.18) Módulo teclado hexadecimal
Objetivo
Básicamente, facilitarle al estudiante de Ingeniería Electrónica la conexión entre un
teclado hexadecimal y un microcontrolador PIC16FXXX.
2.19) Módulos CNY70, LDR, LM35 y BH1750
Figura 42 Módulo Teclado Hexadecimal – Esquemático
Figura 43 Módulos CNY70, LDR, LM35 y BH1750 – Esquemático

59
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el uso y la calibración de un sensor
CNY70, por ejemplo, experimentando la construcción más básica de un seguidor de
línea o de un tacómetro digital.
Facilitarle al estudiante de Ingeniería Electrónica la posibilidad de activar o desactivar
una determinada carga, así como de iniciar o detener un proceso mediante una señal de
luz detectada por la LDR; la desventaja de estos módulos es que los sensores no están
calibrados, por lo que no están diseñados para medir el nivel de luz en un entorno.
Permitirle al estudiante de Ingeniería Electrónica medir temperaturas entre 0 y 150 °C
con el sensor LM35, ya sea del ambiente o de un objeto, a fin de que el PIC realice, si
así lo requiere el usuario, una determinada tarea para algunos rangos de temperatura.
2.20) Módulos potenciómetro de precisión, DAC y timer
Figura 44 Módulos Potenciómetro de Precisión, DAC y Timer – Esquemático

60
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica, mediante un Potenciómetro de
Precisión, la variación de voltaje en el rango aproximado de 0 a 5 V, con mayor
precisión que un TRIMPOT convencional.
Entrenar básicamente al estudiante de Ingeniería Electrónica, con el módulo DAC, en
el procesamiento digital de señales al obtener una señal analógica a partir de una señal
digital PWM de diversas frecuencias para su visualización en el osciloscopio.
Facilitarle al estudiante de Ingeniería Electrónica, con el módulo TIMER, la generación
de un de tren de pulsos de distinta frecuencia mediante la inserción de las resistencias
Ra y Rb en el zócalo respectivo y el capacitor embebido de 100 nF, implementando
manualmente un generador de onda cuadrada con el C. I. NE555N.
2.21) Módulo sensor ultrasónico
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la medición de distancias y detección
de obstáculos con el sensor ultrasónico HC-SR04 y un microcontrolador PIC.
Figura 45 Módulo Sensor Ultrasónico – Esquemático

61
2.22) Módulo matriz LED monocromática 8x8
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la generación y visualización de
mensajes en movimiento usando la MATRIZ LED 8x8 23088A/B monocromática, es
decir, todos sus LED de un mismo color.
2.23) Módulo sensor de humedad
Figura 46 Módulo Matriz LED Monocromática 8x8 – Esquemático
Figura 47 Módulo Sensor de Humedad – Esquemático

62
Objetivo
Aumentar la habilidad del estudiante de Ingeniería Electrónica para identificar zócalos
para el acoplamiento correcto de módulos externos en una tarjeta entrenadora.
Detectar si el suelo de interés para el estudiante de Ingeniería Electrónica está húmedo,
ya sea directamente (pin D0), o en función de una serie de valores analógicos que
proporcione el módulo externo (pin A0).
2.24) Módulo DAC R–2R
Objetivo
Proporcionarle al estudiante de Ingeniería Electrónica una herramienta sencilla y útil
para la generación y tratamiento básicos de señales analógicas.
Mejorar la habilidad del estudiante para conectar todo un puerto del microcontrolador
PIC a un módulo externo de manera paralela, de modo tal que haya una correspondencia
inequívoca entre los pines del puerto del microcontrolador y los pines del módulo.
Fomentar en el estudiante de Ingeniería Electrónica el uso del osciloscopio (pin OUT).
Figura 48 Módulo DAC R–2R – Esquemático

63
2.25) Módulo buzzer activo
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la generación de tonos agudos audibles
de distinta frecuencia, según la frecuencia generada con el microcontrolador PIC.
2.26) Módulo NTC
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la medición de temperaturas con un
sensor barato y sencillo de usar un termistor NTC; la desventaja de este módulo es su
no linealidad, es decir, su variación resistiva no es lineal sino exponencial.
Figura 49 Módulo Buzzer Activo – Esquemático
Figura 50 Módulo NTC – Esquemático
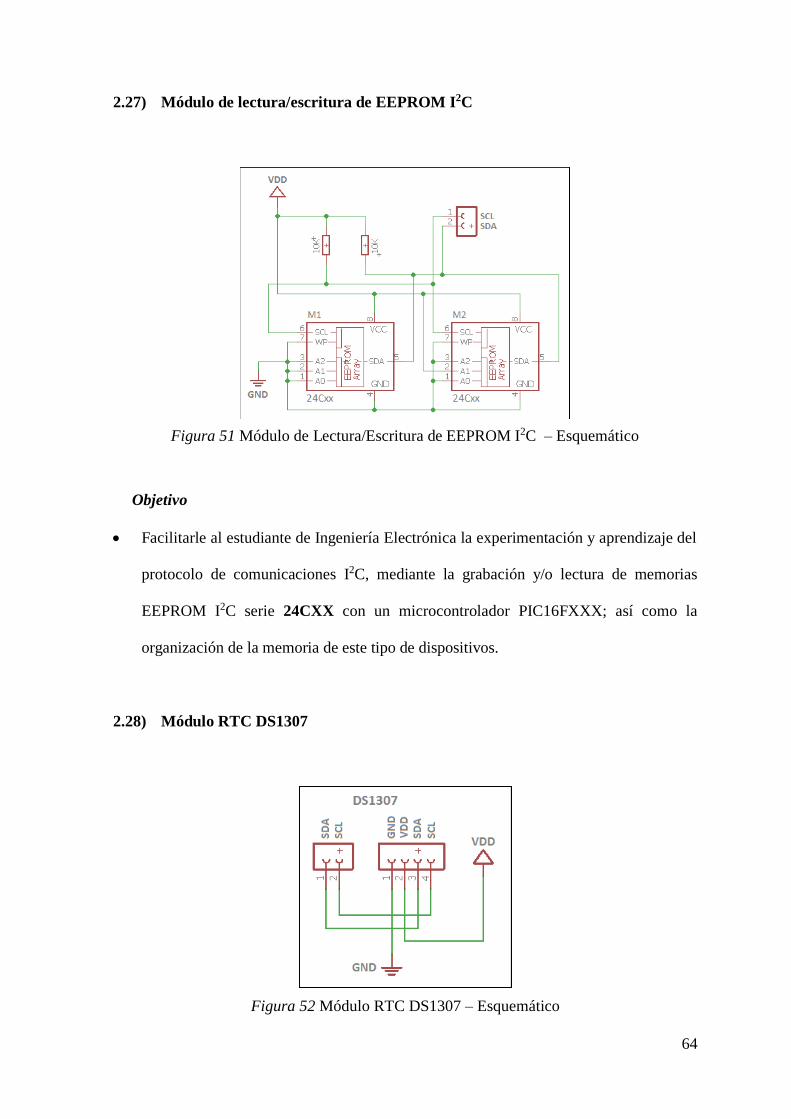
64
2.27) Módulo de lectura/escritura de EEPROM I2C
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la experimentación y aprendizaje del
protocolo de comunicaciones I2C, mediante la grabación y/o lectura de memorias
EEPROM I2C serie 24CXX con un microcontrolador PIC16FXXX; así como la
organización de la memoria de este tipo de dispositivos.
2.28) Módulo RTC DS1307
Figura 51 Módulo de Lectura/Escritura de EEPROM I2C – Esquemático
Figura 52 Módulo RTC DS1307 – Esquemático
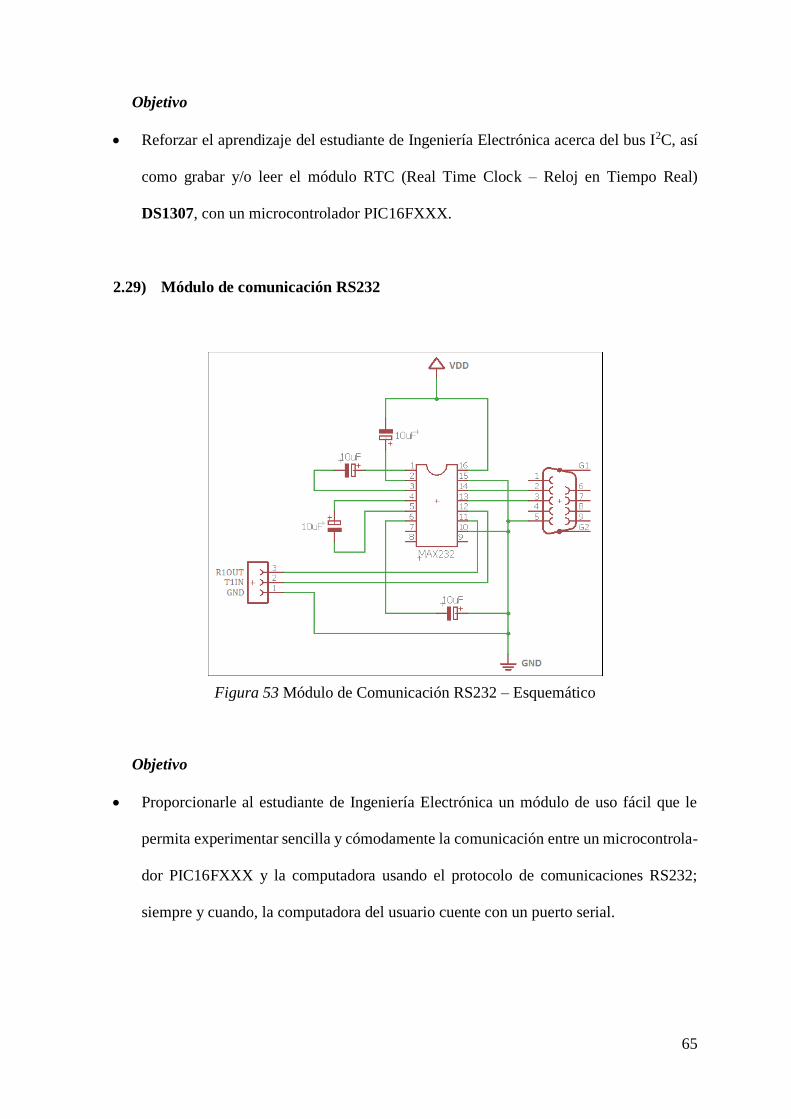
65
Objetivo
Reforzar el aprendizaje del estudiante de Ingeniería Electrónica acerca del bus I2C, así
como grabar y/o leer el módulo RTC (Real Time Clock – Reloj en Tiempo Real)
DS1307, con un microcontrolador PIC16FXXX.
2.29) Módulo de comunicación RS232
Objetivo
Proporcionarle al estudiante de Ingeniería Electrónica un módulo de uso fácil que le
permita experimentar sencilla y cómodamente la comunicación entre un microcontrola-
dor PIC16FXXX y la computadora usando el protocolo de comunicaciones RS232;
siempre y cuando, la computadora del usuario cuente con un puerto serial.
Figura 53 Módulo de Comunicación RS232 – Esquemático

66
2.30) Módulo de comunicación bluetooth
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el uso del módulo bluetooth HC-05,
experimentando la transmisión/recepción inalámbrica de datos con un PIC16FXXX.
2.31) Módulo de lectura/escritura de EEPROM SPI
Figura 54 Módulo de Comunicación Bluetooth – Esquemático
Figura 55 Módulo de Lectura/Escritura de EEPROM SPI – Esquemático

67
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la experimentación y aprendizaje del
protocolo de comunicaciones SPI, mediante la grabación y/o lectura de memorias
EEPROM SPI serie 25LCXX con un microcontrolador PIC16FXXX; así como la
organización de la memoria de este tipo de dispositivos.
2.32) Módulo sensor digital de temperatura
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la experimentación y aprendizaje del
protocolo de comunicaciones 1 – Wire, mediante la lectura de temperaturas en formato
digital detectadas por el sensor DS18B20 con un microcontrolador PIC; así como la
organización de la memoria de este tipo de dispositivos.
Figura 56 Módulo Sensor Digital de Temperatura – Esquemático

68
2.33) Módulo de dos displays multiplexados
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el aprendizaje y experimentación básicas de la multiplexación por división de tiempo.
Reforzar en el estudiante su conocimiento acerca del funcionamiento del C. I. 74LS47 y de un display ánodo común a través del código de
programación cargado en el PIC16FXXX para la utilización del módulo en cuestión.
Figura 57 Módulo de Dos Displays Multiplexados – Esquemático

69
2.34) Módulo de detección de cruce por cero
Figura 58 Módulo de Detección de Cruce por Cero – Esquemático

70
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el aprendizaje y la experimentación
de la técnica del cruce por cero para el control del ángulo de disparo de un TRIAC.
Proporcionarle al estudiante de Ingeniería Electrónica el hardware adecuado para medir,
por ejemplo, la frecuencia de la red eléctrica pública de 220 VAC.
2.35) Módulo de alimentación para etapas de potencia DC
Objetivo
Contar con una fuente de alimentación secundaria para energizar las etapas de potencia
de la Tarjeta Entrenadora FACFYM; por ejemplo, los drivers para accionar motores DC,
ya sean convencionales, o paso a paso unipolar y/o bipolar.
Proteger los microcontroladores PIC, ya que estos no deben alimentar directamente una
carga DC capaz de consumir más de 20 mA, porque el PIC tendería a recalentarse
corriendo el riesgo de averiarse; asimismo, el arranque de un motor DC genera ruido
eléctrico que podría interferir en el funcionamiento del microcontrolador, por ello, se
optó por optoacoplar las etapas de control y de potencia DC.
Figura 59 Módulo de Alimentación para Etapas de Potencia DC – Esquemático

71
2.36) Protección contra cortocircuito para etapas de potencia DC
Objetivo
El objetivo de este módulo es el mismo que el del módulo de Protección contra
cortocircuito para la fuente de energía principal, solo que en este caso se aplica para
la fuente de alimentación secundaria (VCC), la cual se encarga de alimentar las etapas
de potencia DC.
El módulo está diseñado para soportar hasta 2 A de corriente, por lo que la corriente
máxima de cortocircuito será de 2 A; por otro lado, este módulo se diferencia del
primero por las leyendas Vref VCC y RESET VCC; después, el funcionamiento es el
mismo.
Figura 60 Protección contra Cortocircuito para Etapas de Potencia DC –
Esquemático

72
2.37) Módulo buzzer pasivo
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica la generación de diversos tonos a partir
de un rango de frecuencias PWM considerables audibles.
Fomentar en el estudiante la capacidad de comparar el funcionamiento de un BUZER
PASIVO con el de un BUZER ACTIVO, determinando las ventajas y desventajas de
uno respecto al otro, considerando, además, cuándo debe utilizar uno de los dos.
Acostumbrar al estudiante de Ingeniería Electrónica a emplear el dispositivo adecuado,
conforme a las características especificadas por el fabricante o proveedor de un producto
tecnológico, para evitar a corto o largo plazo la avería del mismo.
Figura 61 Módulo Buzzer Pasivo – Esquemático

73
2.38) Módulo relé optoacoplado
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el control de cargas AC a partir de
señales de conmutación digital provenientes de un microcontrolador PIC.
2.39) Módulo de PWM para cargas DC
Figura 62 Módulo Relé Optoacoplado – Esquemático
Figura 63 Módulo de PWM para cargas DC – Esquemático
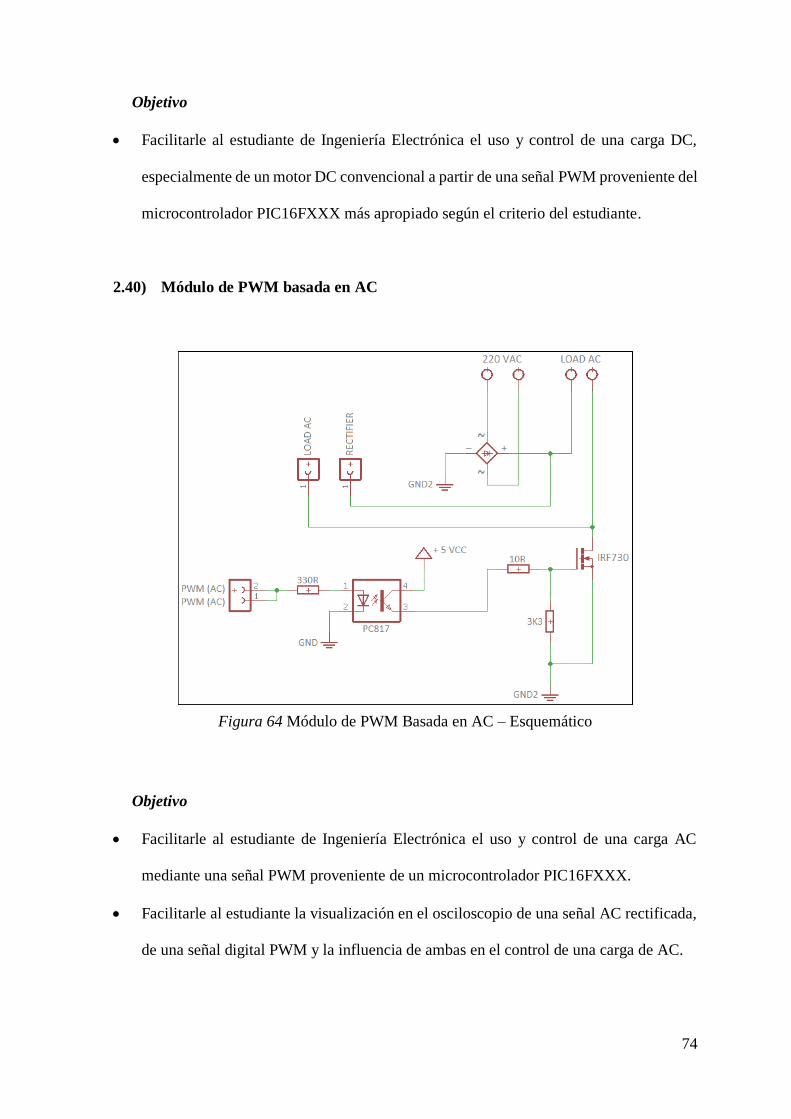
74
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el uso y control de una carga DC,
especialmente de un motor DC convencional a partir de una señal PWM proveniente del
microcontrolador PIC16FXXX más apropiado según el criterio del estudiante.
2.40) Módulo de PWM basada en AC
Objetivo
Facilitarle al estudiante de Ingeniería Electrónica el uso y control de una carga AC
mediante una señal PWM proveniente de un microcontrolador PIC16FXXX.
Facilitarle al estudiante la visualización en el osciloscopio de una señal AC rectificada,
de una señal digital PWM y la influencia de ambas en el control de una carga de AC.
Figura 64 Módulo de PWM Basada en AC – Esquemático

75
2.41) Módulo de etapas de potencia para motores DC
Figura 65 Módulo de Etapas de Potencia para Motor DC Unipolar – Esquemático

76
Figura 66 Módulo de Etapas de Potencia para Motor DC Bipolar – Esquemático

77
Objetivo
Con el primer módulo, facilitarle al estudiante de Ingeniería Electrónica el conexionado
y control de arranque de un motor DC, convencional o paso a paso unipolar.
Con el segundo módulo, facilitarle al estudiante de Ingeniería Electrónica el
conexionado y control de arranque directo y con inversión de giro de un motor DC,
convencional o paso a paso bipolar.
2.42) Proceso de fabricación de la tarjeta entrenadora FACFYM
La tarjeta fue fabricada, no diseñada, por la empresa peruana ADE SERVICES SRL, con
número de RUC 20601148600, ubicada en San Juan de Lurigancho (Lima) y a cargo del Ing.
Omar Chávez Quispicusi (Cel.: 977890155); la empresa fue contactada online por mercado
libre (https://www.mercadolibre.com.pe/) y por este medio pos-compra, nos enviaron por
correo la dirección de correo electrónico de la empresa ([email protected]) para
adjuntar los planos de la Tarjeta Entrenadora FACFYM para su fabricación.
Figura 67 Serigrafía de componentes de la Tarjeta Entrenadora FACFYM

78
La fabricación de la Tarjeta Entrenadora por parte de la empresa ADE SERVICES duró
10 días, desde el 25/07/2018 al 04/08/2018; esta empresa llevó a cabo la serigrafía de la
tarjeta en la baquelita por ambos lados y la soldadura de puentes, luego el tiempo de
soldadura de componentes por parte de los tesistas se extendió hasta el 30/08/2018.
Figura 68 Serigrafía de pistas de la Tarjeta Entrenadora FACFYM
Figura 69 Bachilleres tesistas soldando sobre la tarjeta entrenadora FACFYM

79
Figura 71 Bachilleres tesistas muestran tarjeta implementada en lado de componentes
Figura 70 Tarjeta Entrenadora FACFYM completamente implementada

80
2.43) Diagramas de la tarjeta entrenadora FACFYM
Los diagramas de distribución de pistas y componentes de la tarjeta entrenadora se
presentan en la Figura 79 y Figura 80 respectivamente, mientras que el diagrama
esquemático de la misma en su totalidad, en el Anexo F.
2.44) Pruebas de funcionamiento de la tarjeta entrenadora FACFYM
Se hicieron diversas pruebas de funcionamiento para comprobar que las pistas no estén
cortocircuitadas; posteriormente se procedió a verificar las demás etapas.
A continuación, se muestran imágenes de las pruebas de funcionamiento implementando
aplicaciones reales con microcontroladores PIC16FXXX; algunas de manera individual y
otras en presencia de estudiantes de Ingeniería Electrónica de la UNPRG, en el Laboratorio
de Electrónica N° 3 de dicha casa de estudios.
Figura 72 Bachilleres tesistas muestran tarjeta implementada en lado de pistas

81
Figura 73 Termómetro digital con PIC16F873A y LM35
Figura 74 Semáforo de dos intersecciones con PIC16F628A

82
Figura 76 Inicio de la demostración de la Tarjeta Entrenadora FACFYM
Figura 75 Medidor de distancia con PIC16F877A y HC-SR04

83
Figura 78 Explicación del montaje de un programa grabado en el PIC16F628A
Figura 77 Explicación del proceso para grabar un PIC con el módulo PICkit2 Clone

84
DISTRIBUCIÓN DE COMPONENTES DE LA TARJETA ENTRENADORA FACFYM
Figura 79 Tarjeta Entrenadora FACFYM – Diagrama PCB

85
DISTRIBUCIÓN DE PISTAS DE LA TARJETA ENTRENADORA FACFYM
Figura 80 Tarjeta Entrenadora FACFYM – Diagrama de pistas

86
2.45) Presupuesto
Tabla 9
Tabla de presupuestos
COMPONENTE VALOR
PRECIO
UNITARIO
(S/.)
CANTIDAD TOTAL (S/.)
Microcontrolador
PIC
12F675 6.00 2 12.00
18F2550 25.00 1 25.00
TRIMPOT
20 KΩ 0.80 2 1.60
10 KΩ 0.50 2 1.00
Potenciómetro de
precisión
1 KΩ 1.00 3 3.00
100 KΩ 1.00 1 1.00
Zócalo DIP para
circuito integrado
40 pines 1.00 1 1.00
28 pines 1.00 2 2.00
18 pines 0.50 2 1.00
16 pines 0.50 6 3.00
14 pines 0.25 2 0.50
8 pines 0.20 12 2.40
6 pines 0.20 1 0.20
Conector DB9 PCB Hembra 2.00 1 2.00
Regulador de
tensión
L7805CV 1.00 2 2.00
LM317T 1.00 1 1.00
Jack Power 0.50 2 1.00
Bornera Doble 0.50 6 3.00

87
COMPONENTE VALOR
PRECIO
UNITARIO
(S/.)
CANTIDAD TOTAL (S/.)
Puente rectificador
2W08 1.00 1 1.00
KBPC1010 3.00 1 3.00
Conector USB
hembra
B Estándar 1.00 1 1.00
Buzzer activo 5V 1.00 1 1.00
Condensador
electrolítico
1 µF 0.20 2 0.40
10 µF 0.20 6 1.20
22 µF 0.20 1 0.20
47 µF 0.20 1 0.20
220 µF 0.20 1 0.20
Condensador
cerámico
22 pF 0.10 8 0.80
1 nF 0.10 48 4.80
10 nF 0.10 1 0.10
100 nF 0.20 6 1.20
100 nF/400 V 1.00 2 2.00
Cristal 20 MHz 1.00 1 1.00
Diodos
1N4148 0.10 1 0.10
1N5819 1.00 2 2.00
1N4007 0.10 8 0.80
1N5399 0.10 3 0.30
Inductor 680 µH 1.00 1 1.00

88
COMPONENTE VALOR
PRECIO
UNITARIO
(S/.)
CANTIDAD TOTAL (S/.)
Relé 5V 3.00 3 9.00
TRIAC BT136 1.00 1 1.00
Espadín
Macho 1.00 2 2.00
Hembra 1.00 13 13.00
LED blanco
brillante
5 mm 0.20 1 0.20
LED ámbar brillante
3 mm 0.10 3 0.30
5 mm 0.20 2 0.40
LED azul brillante 5 mm 0.20 1 0.20
LED rojo opaco 5 mm 0.20 2 0.40
LED ámbar opaco 5 mm 0.20 2 0.40
LED verde opaco 5 mm 0.20 2 0.40
LED azul opaco 5 mm 0.20 2 0.40
Timer LM555 0.50 1 0.50
Optoacoplador
CT3020 1.50 1 1.50
PC817 1.00 19 19.00
OPAMP LM358 1.00 2 2.00
Jumper doble Hembra 0.30 4 1.20
Pulsador NO
Cuadrado 0.30 5 1.50
Redondo 0.30 8 2.40
Resistencias 2W 100 Ω 0.70 1 0.70

89
COMPONENTE VALOR
PRECIO
UNITARIO
(S/.)
CANTIDAD TOTAL (S/.)
Resistencias 1 W 10 Ω 0.20 1 0.20
Resistencias ¼ W
200 KΩ 0.10 1 0.10
100 KΩ 0.10 2 0.20
68 KΩ 0.10 1 0.10
50 KΩ 0.10 1 0.10
39 KΩ 0.10 1 0.10
20 KΩ 0.10 1 0.10
10 KΩ 0.10 26 2.60
8.2 KΩ 0.10 2 0.20
6.8 KΩ 0.10 1 0.10
4.7 KΩ 0.10 5 0.50
3.3 KΩ 0.10 2 0.20
2.7 KΩ 0.10 1 0.10
2 KΩ 0.10 14 1.40
1 KΩ 0.10 34 3.40
820 Ω 0.10 1 0.10
390 Ω 0.10 1 0.10
330 Ω 0.10 36 3.60
220 Ω 0.10 7 0.70
100 Ω 0.10 2 0.20
75 Ω 0.10 1 0.10
33 Ω 0.10 3 0.30
10 Ω 0.10 5 0.50
Display de 7
segmentos
Ánodo común 1.50 2 3.00
Sensores
LDR 1.00 1 1.00
NTC 50K 1.00 1 1.00

90
COMPONENTE VALOR
PRECIO
UNITARIO
(S/.)
CANTIDAD TOTAL (S/.)
Transistores
IRF730 2.50 2 5.00
BD137 0.70 1 0.70
BC558 0.30 5 1.50
BC548 0.30 9 2.70
Drivers
74LS47 1.50 1 1.50
L293B 5.00 1 5.00
ULN2803 1.50 1 1.50
74HC164 1.50 1 1.50
74HC14 1.50 1 1.50
MAX232 2.00 1 2.00
Estaño (metro) 1.00 5 5.00
Disipador de aleta
de aluminio
Pequeño 1.50 1 1.50
Aislante de mica
para disipador
Pequeño 0.30 1 0.30
Tarugo y tornillo
para disipador Juego 0.50 1 0.50
Soporte y serigrafía 270 1 270.00
Inversión total (S/.) 460.50
Presupuesto para la Tarjeta Entrenadora FACFYM (Elaboración propia)

91
CAPÍTULO III: RESULTADOS Y DISCUSIÓN
Evaluación del curso “Sistemas Digitales”
Actualmente el curso de Sistemas Digitales de la Escuela Profesional de Ingeniería
Electrónica de la UNPRG, se imparte durante el cuarto ciclo de la carrera y abarca
específicamente la programación de microcontroladores, generalmente PIC en lenguaje
ASSEMBLER y/o C. Sin embargo, resultaba necesaria la opinión de los estudiantes de
Ingeniería Electrónica respecto al curso, para obtener información actualizada sobre el
desarrollo del mismo y las posibilidades de mejora que podrían existir en el aprendizaje de
los futuros estudiantes del curso al contar con la Tarjeta Entrenadora FACFYM; para ello se
realizaron tres encuestas, aplicando en todos los casos un muestreo no probabilístico, tanto
por conveniencia como discrecional.
Actualmente (2018), el número total de estudiantes de Ingeniería Electrónica en la
UNPRG es 493, de estos se tomó una muestra de 58, la cual fue dividida de la siguiente
manera:
19 estudiantes del 8º ciclo → Primera encuesta (30/04/2018)
28 estudiantes del 7º ciclo → Segunda encuesta (03/05/2018)
11 estudiantes del 8º ciclo → Tercera encuesta (13/11/2018)
Para la Primera y Segunda Encuesta (consulte el Anexo L) se utilizó el mismo formato,
para la tercera encuesta (Anexo M) se elaboró un documento diferente.
A continuación, se muestran los resultados de las encuestas, esto nos ayudó a plantear el
panorama de aprendizaje en programación de microcontroladores PIC de los estudiantes de

92
Ingeniería Electrónica, así como de la mejora de sus habilidades en el conexionado de
circuitos electrónicos digitales.
Resultados de la primera encuesta – séptimo ciclo
SECCIÓN I: CONOCIMIENTOS
Fuente: Elaboración propia
Fuente: Elaboración propia
20%
29%
25%21%
4%
0%
5%
10%
15%
20%
25%
30%
35%
Muy Poco Poco Regular Bueno Muy Bueno
Software de grabación de microcontroladores
43%
21%24%
2%0%
0%
5%
10%
15%
20%
25%
30%
35%
40%
45%
Muy Poco Poco Regular Bueno Muy Bueno
Marcas de microcontroladores
Figura 82 Resultado: Software de grabación de microcontroladores – 7° ciclo
Figura 81 Resultado: Marcas de microcontroladores – 7° ciclo
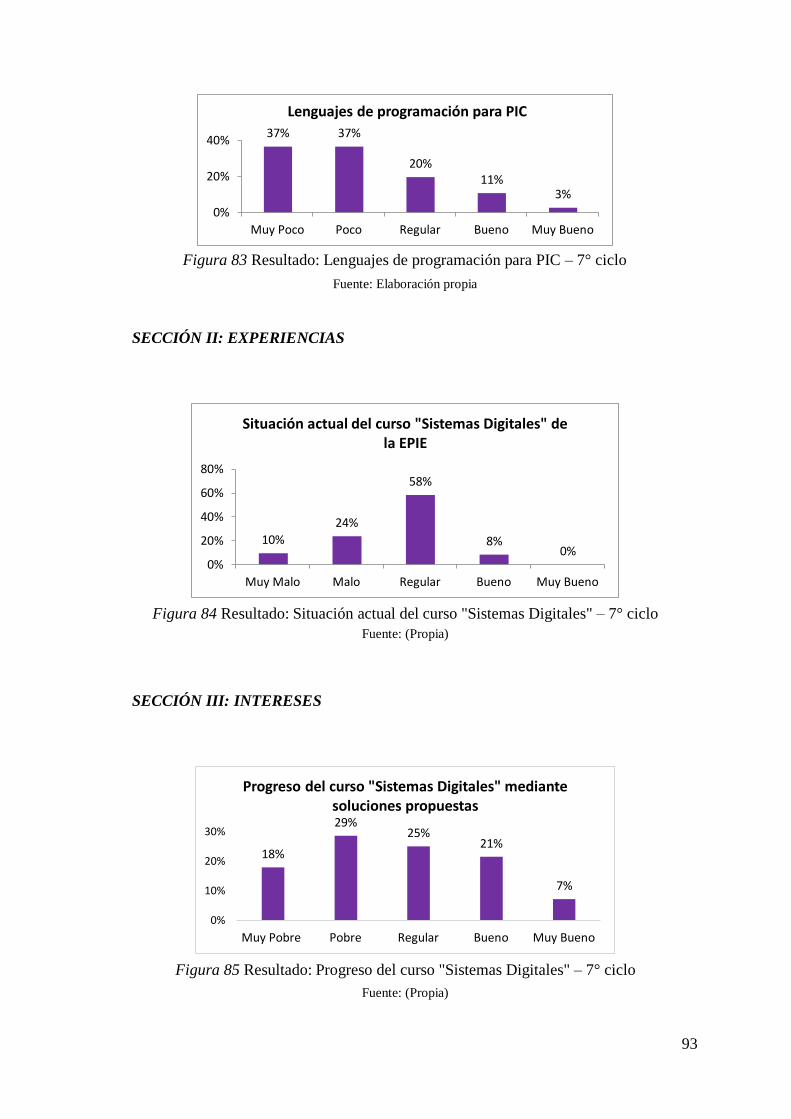
93
Fuente: Elaboración propia
SECCIÓN II: EXPERIENCIAS
Fuente: (Propia)
SECCIÓN III: INTERESES
Fuente: (Propia)
10%
24%
58%
8%0%
0%
20%
40%
60%
80%
Muy Malo Malo Regular Bueno Muy Bueno
Situación actual del curso "Sistemas Digitales" de la EPIE
18%
29%25%
21%
7%
0%
10%
20%
30%
Muy Pobre Pobre Regular Bueno Muy Bueno
Progreso del curso "Sistemas Digitales" mediante soluciones propuestas
37% 37%
20%11%
3%
0%
20%
40%
Muy Poco Poco Regular Bueno Muy Bueno
Lenguajes de programación para PIC
Figura 83 Resultado: Lenguajes de programación para PIC – 7° ciclo
Figura 84 Resultado: Situación actual del curso "Sistemas Digitales" – 7° ciclo
Figura 85 Resultado: Progreso del curso "Sistemas Digitales" – 7° ciclo

94
SECCIÓN IV: OPINIONES
Fuente: (Propia)
Resultados de la segunda encuesta – octavo ciclo
SECCIÓN I: CONOCIMIENTOS
Fuente: (Propia)
25%
36%
18%
11% 11%
0%
5%
10%
15%
20%
25%
30%
35%
40%
Muy de acuerdo De acuerdo Ni acuerdo nidesacuerdo
En desacuerdo Muy endesacuerdo
Grado de acuerdo con opiniones emitidas
26%
37%
19%
14%
4%
0%
5%
10%
15%
20%
25%
30%
35%
40%
Muy Malo Malo Regular Bueno Muy Bueno
Marcas de microcontroladores
Figura 86 Resultado: Grado de acuerdo con opiniones propuestas – 7° ciclo
Figura 87 Resultado: Marcas de microcontroladores – 8° ciclo

95
Fuente: Elaboración propia
Fuente: Elaboración propia
SECCIÓN II: EXPERIENCIAS
Fuente: Elaboración propia
18% 18%
49%
12%
4%
0%
10%
20%
30%
40%
50%
60%
Muy Malo Malo Regular Bueno Muy Bueno
Situación actual del curso "Sistemas Digitales" de la EPIE
20% 18%
30%
22%
9%
0%
10%
20%
30%
40%
Muy Malo Malo Regular Bueno Muy Bueno
Software de grabación de microcontroladores
28% 29%
20%
13%11%
0%
10%
20%
30%
40%
Muy Malo Malo Regular Bueno Muy Bueno
Lenguajes de programación
Figura 88 Resultado: Software de grabación de microcontroladores – 8° ciclo
Figura 89 Resultado: Lenguajes de programación para PIC – 8° ciclo
Figura 90 Resultado: Situación actual del curso "Sistemas Digitales" – 8° ciclo
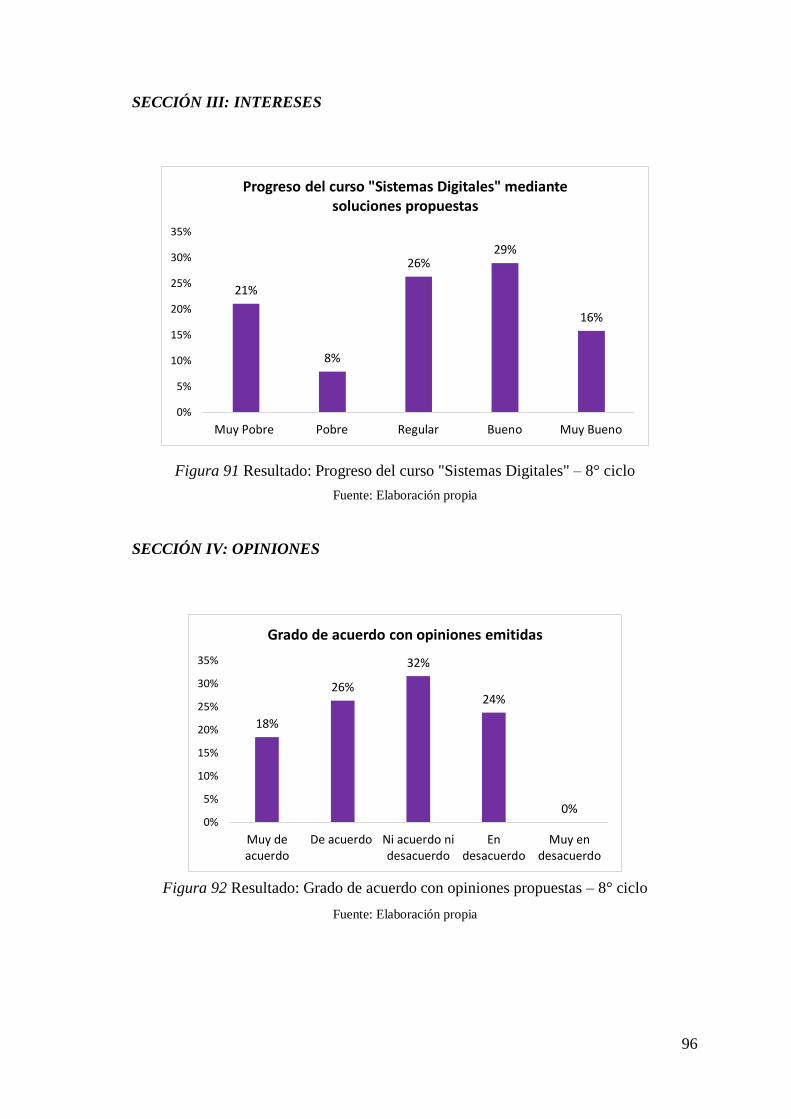
96
SECCIÓN III: INTERESES
Fuente: Elaboración propia
SECCIÓN IV: OPINIONES
Fuente: Elaboración propia
21%
8%
26%29%
16%
0%
5%
10%
15%
20%
25%
30%
35%
Muy Pobre Pobre Regular Bueno Muy Bueno
Progreso del curso "Sistemas Digitales" mediante soluciones propuestas
18%
26%
32%
24%
0%0%
5%
10%
15%
20%
25%
30%
35%
Muy deacuerdo
De acuerdo Ni acuerdo nidesacuerdo
Endesacuerdo
Muy endesacuerdo
Grado de acuerdo con opiniones emitidas
Figura 91 Resultado: Progreso del curso "Sistemas Digitales" – 8° ciclo
Figura 92 Resultado: Grado de acuerdo con opiniones propuestas – 8° ciclo

97
Resultados de la tercera encuesta – octavo ciclo
Para conocer las preguntas planteadas en la tercera encuesta consulte el Anexo L.
Fuente: Elaboración propia
Propia: Elaboración propia
73
%
10
0%
10
0%
10
0%
73
%
10
0%
10
0%
73
%
27%
0% 0% 0%
27%
0% 0%
27%
1 2 3 4 5 6 7 8PO
RC
ENTA
JE D
E R
ESP
UES
TAS
PREGUNTA NÚMERO:
RESULTADOS DEL PRIMER BLOQUE DE PREGUNTAS
Sí No
Figura 93 Resultados del primer bloque de preguntas de la tercera encuesta
55%
9%
36%
1
PO
RC
ENTA
JE D
E R
ESP
UES
TAS
PREGUNTA NÚMERO:
SEGUNDO BLOQUE DE PREGUNTAS
Buena Mala Regular
Figura 94 Resultados del segundo bloque de preguntas de la tercera encuesta

98
Fuente: Elaboración propia
Discusión
Con la primera y segunda encuesta se pudo evaluar más eficazmente la problemática
planteada en este trabajo de investigación, lo cual resultó en gran medida, en el visto
bueno por parte de los encuestados para proceder con el desarrollo del proyecto.
Lo poco que conocen los estudiantes de Ingeniería Electrónica acerca de programación
PIC, ha sido comprobado mayormente en simulaciones.
Mayormente, cuando se trabaja en grupo, siempre hay un miembro que se encarga de
desarrollar el 75% del trabajo, el otro 25% del trabajo implica conexionar, o exponer al
docente el funcionamiento del circuito; esto ocasiona que, de todos los integrantes, solo
uno o dos como máximo, aprendan a programar realmente un microcontrolador PIC.
Según los resultados individuales de las encuestas, los alumnos conocen mayormente
Lenguaje C y Arduino, muy poco de Assembler y Basic; aun cuando Basic es un
lenguaje C para principiantes.
La mayoría de los estudiantes encuestados coinciden en el hecho de que no basta
adquirir códigos de programación elaborados por otros estudiantes para implementarlos
91% 10
0%
9%
0%
1 2
PO
RC
ENTA
JE D
E R
ESP
UES
TAS
PREGUNTA NÚMERO:
TERCER BLOQUE DE PREGUNTAS
Sí
No
Figura 95 Resultados del tercer bloque de preguntas de la tercera encuesta
99
a través del hardware requerido por la aplicación, ya que muchas veces el alumno no
procura estudiar dicho código, lo que genera una dependencia de la creatividad de otros,
y no siempre esos códigos están exentos de posibles errores al momento de compilarlos.
Según los encuestados, el desarrollo del curso “Sistemas Digitales” les ha resultado en
el mejor de los casos, regular, y después de esto, malo o muy malo debido a la falta de
una herramienta que les permita, tanto a los estudiantes como al docente, simplificar el
tiempo de prueba y montaje de laboratorios propuestos en clase.
Los pocos casos en que a los encuestados les ha parecido bueno el desarrollo del curso
de Sistemas Digitales, es porque llevaron un curso particular de programación PIC
previo al curso impartido en la EPIE.

100
CAPÍTULO IV: CONCLUSIONES
Se logró diseñar e implementar la Tarjeta Entrenadora FACFYM, además de demostrar
su funcionamiento a un grupo de estudiantes de Ingeniería Electrónica durante la tercera
encuesta, entre los cuales estuvieron presentes algunos estudiantes que participaron en
la primera encuesta.
Con la Tarjeta Entrenadora FACFYM durante la tercera encuesta, los estudiantes de
Ingeniería Electrónica experimentaron un conexionado modular más detallado y eficaz
para la programación de microcontroladores PIC16FXXX de Microchip.
Los encuestados luego de la demostración, consideraron que las habilidades técnicas de
los estudiantes de ingeniería electrónica que usen periódicamente la tarjeta se
incrementarán implementando diversos proyectos con microcontroladores PIC16FXXX
inmediatamente después de haberlos programado.
101
CAPÍTULO V: RECOMENDACIONES
La Tarjeta Entrenadora FACFYM no está limitada a 3 microcontroladores PIC16FXXX
específicos, pero ya que los zócalos son PDIP, la inserción y extracción constantes del
microcontrolador podrían dañar sus pines, por lo cual se recomienda instalar desde un
inicio tres microcontroladores PIC16FXXX con las prestaciones necesarias para el
desarrollo de aplicaciones, evitando dañar el PIC y la plataforma.
La Tarjeta Entrenadora FACFYM ha sido diseñada para uso grupal; es decir, para que
más de un usuario, cada uno con una proyección diferente, trabaje sobre la plataforma.
El software PICkit para la grabación de los microcontroladores PIC de la tarjeta, solo
debe ser de la versión 2, ya que cada versión del PICkit cuenta con su propio hardware.
El usuario no debe ensayar pruebas de cortocircuito entre los pines + y – de la tarjeta,
ya que pone en riesgo el puerto USB o la fuente de energía empleada; las pruebas de
cortocircuito solo deben ensayarse entre los pines VDD y GND (etapas de control), y
entre los pines VCC y GND2 (etapas de potencia DC).
Como todo producto tecnológico, la Tarjeta Entrenadora FACFYM también está sujeta
a modificaciones respecto a su hardware en versiones posteriores.

102
REFERENCIAS BIBLIOGRÁFICAS
Bombón, J. A. (2007). Módulo para Verificar el Funcionamiento de los Programas
Grabados en el PIC16F84A. Tesis de Grado, Universidad Politécnica Nacional,
Quito. Obtenido de https://biblioteca.epn.edu.ec/cgi-bin/koha/opac-
detail.pl?biblionumber=7711
EDRpaul. (3 de Diciembre de 2011). Recuperado el 15 de Febrero de 2018, de
http://edrpaul.blogspot.com/2011/12/alarma-gsm-utilizando-un-viejo-telefono.html
Electrónica Desarrollo. (12 de Octubre de 2011). Electrónica Desarrollo. Recuperado el 10
de Enero de 2018, de http://www.electronicaestudio.com/microcontrolador.htm
Franco, R., & Montesdeoca, I. (2014). Diseño y Construcción de Cinco Entrenadores
Didácticos con Sistemas Microprocesados y Desarrollo de una Aplicación de
Control de Velocidad para un Motor de Corriente Alterna. Tesis de Grado,
Universidad Politécnica Salesiana, Guayaquil. Obtenido de
https://dspace.ups.edu.ec/handle/123456789/10418
García, J. G. (28 de Septiembre de 2016). LiNbertec. Recuperado el 12 de Abril de 2018,
de https://www.linbertec.com/producto/arduino-compatible-uno/
INVENTABLE.eu. (27 de Marzo de 2013). Recuperado el 10 de Abril de 2018, de La
electrónica simple y clara: https://www.inventable.eu/2013/03/27/062-
programador-de-pics/
López, E. (2011). Protocolo SPI. Recuperado el 22 de Enero de 2018, de Teorìa y
Aplicaciones: http://www.i-micro.com/pdf/articulos/spi.pdf
Luis. (03 de Junio de 2016). INGENIERIA ELECTRONICA.ORG. Recuperado el 12 de
Noviembre de 2018, de https://ingenieriaelectronica.org/utilizar-el-teclado-
matricial-4x4-con-arduino/
Microchip. (2003). PIC16F87XA Data Sheet. Recuperado el 10 de Enero de 2018, de
http://ww1.microchip.com/downloads/en/DeviceDoc/39582b.pdf
Microchip. (2007). PIC16F627A/628A/648A Data Sheet. Recuperado el 10 de Enero de
2018, de http://ww1.microchip.com/downloads/en/DeviceDoc/41196g.pdf
MikroElecktronika. (2015). MikroElecktronika. Obtenido de
https://www.mikroe.com/ebooks/microcontroladores-pic-programacion-en-c-con-
ejemplos/caracteristicas-basicas-del-pic16f887
MUESTREO Y CONVERSIÓN ANALÓGICA DIGITAL. (s.f.). Recuperado el 14 de
Diciembre de 2018, de http://www.ehu.eus/Procesadodesenales/tema1/t53.htm
Niple Blog. (1 de Noviembre de 2018). Obtenido de SALIDA ANALÓGICA CON PIC:
http://www.niplesoft.net/blog/2016/05/24/dac-con-resistencias/

103
Palacios, E., Remiro, F., & López, L. (2004). Microcontrolador PIC16F84 Desarrollo de
Proyectos (Primera ed.). Madrid, España: Alfaomega.
PROYECTO DE RFID EN UPJR.EDU.MX. (15 de Noviembre de 2018). Obtenido de
https://proyectorfid.wordpress.com/2014/03/24/sensor-de-temperatura-con-lm35/
Reyes, C. (2008). Microcontroladores PIC 16F62X 16F81X 16F87X (Tercera ed., Vol. 1).
Quito, Ecuador: RISPERGRAF.
Ruggiero, M. (2011). UNNOBA ARQUITECTURA II. Recuperado el 10 de Febrero de
2018, de SUBRUTINAS EN ASSEMBLER:
http://carteleras.webcindario.com/Subrutinas.pdf
Salvatierra, D. (2010). Microcontroladores PIC 16F877A y 16F887 (Primera ed.). México,
D. F.: Alfaomega.
UGE electronics uge-one.com. (15 de Noviembre de 2018). Obtenido de https://uge-
one.com/pc817-optocoupler-optoisolator-dip-ic.html
Universo Formulas. (s.f.). Recuperado el 10 de Marzo de 2018, de MUESTREO NO
PROBABILISTICO:
https://www.universoformulas.com/estadistica/inferencia/muestreo-no-
probabilistico/
Universo Formulas. (s.f.). Recuperado el 10 de Marzo de 2018, de MUESTREO
PROBABILISTICO:
https://www.universoformulas.com/estadistica/inferencia/muestreo-probabilistico/

104
BIBLIOGRAFÍA
Bombón, J. A. (2007). Módulo para Verificar el Funcionamiento de los Programas
Grabados en el PIC16F84A. Tesis de Grado, Universidad Politécnica Nacional,
Quito. Obtenido de https://biblioteca.epn.edu.ec/cgi-bin/koha/opac-
detail.pl?biblionumber=7711
Bueno, V. (12 de Enero de 2011). Plataforma Docente para el Aprendizaje de
Microcontroladores 'PIC' de Microchip. Recuperado el 5 de Enero de 2018, de
https://upcommons.upc.edu/bitstream/handle/2117/14420/Art%C3%ADculo%20S
AAEI%20-%20Plataforma%20uC.pdf
Dujmovic, M. (2006). Diseño de un Entrenador de Microcontroladores PIC para el
Laboratorio de Microcontroladores del Instituto Universitario Jesús Obrero. Tesis
de Grado, Universidad Simón Bolívar, Sartenejas. Obtenido de
https://studylib.es/doc/8542370/dise%C3%B1o-de-un-entrenador-de-
microcontroladores-pic-para-el
Figueroa, E. D. (2010). Diseño y Construcción de Tarjetas Entrenadoras para
Aplicaciones con Microcontroladores PIC, Motorola y ATMEL FPGA para el
Entrenamiento en las Diferentes Áreas de los Alumnos de la Escuela Profesional
de Ingeniería Electrónica – UNPRG. Tesina, Lambayeque.
Franco, R., & Montesdeoca, I. (2014). Diseño y Construcción de Cinco Entrenadores
Didácticos con Sistemas Microprocesados y Desarrollo de una Aplicación de
Control de Velocidad para un Motor de Corriente Alterna. Tesis de Grado,
Universidad Politécnica Salesiana, Guayaquil. Obtenido de
https://dspace.ups.edu.ec/handle/123456789/10418

ANEXOS

Anexo A – Manual de instrucciones de la Tarjeta Entrenadora FACFYM

i
TARJETA ENTRENADORA FACFYM
USO PRETENDIDO
La tarjeta entrenadora FACFYM está diseñada para el aprendizaje integral en programación
de microcontroladores PIC16FXXX de Microchip de 18, 28 y 40 pines, y está dirigida a
todos los estudiantes de Ingeniería Electrónica, así como aficionados a la electrónica.
Sus dimensiones son 21.8 x 26.1 cm2 y cuenta con un conjunto de módulos embebidos con
sus respectivas interfaces mediante conectores de propósito general y/o específicos para el
diseño e implementación de diversas aplicaciones reales.
Admite la inserción de módulos externos, tales como sensores de temperatura, sensor
ultrasónico, módulos bluetooth, etc., y cuenta con un grabador PICkit 2 Clone integrado, una
interfaz de comunicación RS232 y dos etapas de protección contra cortocircuito e inversión
de polaridad, una para la fuente de alimentación principal y otra para la secundaria.
INFORMACIÓN DE SEGURIDAD IMPORTANTE
ADVERTENCIAS
Seguridad
Una vez energizada la tarjeta con las fuentes de energía, principal (USB – POWER) y/o
secundaria (VCC – 220 VAC), el usuario no debe tocar las pistas de la tarjeta ni los puentes
a fin de evitar descargas eléctricas peligrosas.
Fuentes de alimentación
La energía principal proviene, ya sea del puerto USB (PC – laptop) o de una fuente de
alimentación auxiliar (POWER), la primera es indispensable para la grabación de los
microcontroladores, la segunda permite alimentar las etapas de control con una tensión
de 5V, igual que la primera, pero con un suministro mayor de corriente, según la fuente.
Figura 96 Tarjeta Entrenadora FACFYM

ii
TARJETA ENTRENADORA FACFYM
Para las etapas de potencia DC se utiliza la fuente de alimentación secundaria (VCC).
Las etapas de potencia AC se alimentan mediante borneras (220 VAC) con el voltaje de
la red eléctrica pública.
Las fuentes de alimentación, principal (USB – POWER) y secundarias (VCC – 220
VAC), están opto-acopladas mediante arreglos de circuitos integrados PC817 (PC817
ARRAY).
Corriente de cortocircuito
Si bien las fuentes de energía para las etapas de control y de potencia DC cuentan con
una etapa de protección contra cortocircuito embebida en la tarjeta, esta protección se
basa en la corriente de corto circuito deseada y otros parámetros que se explican en los
apartados 1, 3, 31 y 32 del Manual de Instrucciones.
Sugerencias
Si es su primera experiencia con el producto, revise primeramente el manual de
instrucciones de la tarjeta entrenadora FACFYM antes de usarla.
Evite el contacto excesivo de las yemas de los dedos con las leyendas de la tarjeta, esto
para impedir el deterioro de la serigrafía.
La tarjeta está diseñada para uso grupal, es decir, puede ser manipulada por varios
usuarios simultáneamente según la proyección de cada uno.
Precauciones
Una vez energizadas las etapas de control o de potencia DC de la tarjeta entrenadora,
antes de usar cualquier módulo, establezca primeramente la corriente de cortocircuito
deseada, e inmediatamente después de abrirse el relé y encenderse el LED respectivo,
haga una prueba sencilla para comprobar si la tarjeta y la fuente están protegidas en caso
de ocurrir un cortocircuito accidental; para ello, conecte directamente un pin VDD con
un pin GND y/o un pin VCC con el pin GND2.
No ensaye pruebas de cortocircuito entre los pines + y – de la tarjeta, ya que pone en
riesgo el puerto USB o la fuente de energía empleada; las pruebas de cortocircuito solo
deben ensayarse entre los pines VDD y GND (etapas de control), y entre los pines VCC
y GND2 (etapas de potencia DC).
Revise los apartados 1 y 32 para ajustar las corrientes de cortocircuito.
Al insertar un circuito integrado en su respectivo zócalo en la tarjeta, verifique que las
hendiduras de ambos coincidan para evitar la avería del dispositivo debido a una
polarización inversa.
OBJETIVO DE LA PLATAFORMA
El objetivo de la tarjeta entrenadora FACFYM es, principalmente, acelerar el aprendizaje
del estudiante de Ingeniería Electrónica en la programación de microcontroladores
PIC16FXXX de Microchip, independientemente del lenguaje de programación usado, así
como en la solución de problemas en aplicaciones embebidas.

iii
TARJETA ENTRENADORA FACFYM
CONTENIDO
ÍNDICE ....................................................................................................................................... X
USO PRETENDIDO .................................................................................................................... I
INFORMACIÓN DE SEGURIDAD IMPORTANTE ................................................................. I
ADVERTENCIAS ......................................................................................................... I
Seguridad ..............................................................................................................................i
Fuentes de alimentación ........................................................................................................i
Corriente de cortocircuito .................................................................................................... ii
Sugerencias ......................................................................................................................... ii
Precauciones........................................................................................................................ ii
OBJETIVO DE LA PLATAFORMA ............................................................................ II
CONTENIDO ............................................................................................................................ III
1. PROTECCIÓN CONTRA CORTOCIRCUITO PARA ETAPAS DE CONTROL ........................1
Distribución en la tarjeta ...................................................................................................... 1
Descripción .......................................................................................................................... 1
Calibración de Vref VDD..................................................................................................... 2
2. MÓDULO GRABADOR PICKIT 2 CLONE ....................................................................3
Distribución en la tarjeta ...................................................................................................... 3
Descripción .......................................................................................................................... 3
3. SELECTOR DE FUENTE DE ENERGÍA PARA ETAPAS DE CONTROL ...............................4
Distribución en la tarjeta ...................................................................................................... 4
Descripción .......................................................................................................................... 4
4. GRABADOR DE MICROCONTROLADOR PIC12FXX ..................................................5
Distribución en la tarjeta ...................................................................................................... 5
Descripción .......................................................................................................................... 6
Conexión con el grabador PICkit 2 Clone ............................................................................ 6
5. ENTRENADOR DE µC PIC16FXXX DE 18 PINES .......................................................7
Distribución en la tarjeta ...................................................................................................... 7
Descripción .......................................................................................................................... 7
Conexión con el Grabador PICkit 2 ..................................................................................... 8
6. ENTRENADOR DE µC PIC16FXXX DE 28 PINES .......................................................9
Distribución en la tarjeta ...................................................................................................... 9
Descripción .......................................................................................................................... 9
Conexión con el Grabador PICkit 2 ................................................................................... 10

iv
TARJETA ENTRENADORA FACFYM
7. ENTRENADOR DE µC PIC16FXXX DE 40 PINES ..................................................... 11
Distribución en la tarjeta .................................................................................................... 11
Descripción ........................................................................................................................ 11
Conexión con el Grabador PICkit 2 ................................................................................... 12
8. MÓDULO DE GRABACIÓN DE EEPROM I2C ........................................................... 12
Distribución en la tarjeta .................................................................................................... 12
Descripción ........................................................................................................................ 12
Conexión con el Grabador PICkit 2 ................................................................................... 13
9. MÓDULO DE NUEVE DIODOS LED .......................................................................... 14
Distribución en la tarjeta .................................................................................................... 14
Descripción ........................................................................................................................ 14
10. MÓDULO DE 5 PULSADORES NO (NORMALLY OPEN)............................................. 15
Distribución en la tarjeta .................................................................................................... 15
Descripción ........................................................................................................................ 15
11. MÓDULO ALARMA GSM ........................................................................................ 15
Distribución en la tarjeta .................................................................................................... 15
Descripción ........................................................................................................................ 16
12. MÓDULO LCD 16X2............................................................................................... 16
Distribución en la tarjeta .................................................................................................... 16
Descripción ........................................................................................................................ 16
13. MÓDULO CNY70, LDR, LM35 Y BH1750 ............................................................. 17
Distribución en la tarjeta .................................................................................................... 17
Descripción general ............................................................................................................ 17
Módulo CNY70 .................................................................................................................. 18
Módulos LDR .................................................................................................................... 18
Módulo LM35 .................................................................................................................... 18
14. MÓDULO DE DOS POTENCIÓMETROS ...................................................................... 19
Distribución en la tarjeta .................................................................................................... 19
Descripción ........................................................................................................................ 19
15. MÓDULO TECLADO HEXADECIMAL ........................................................................ 19
Distribución en la tarjeta .................................................................................................... 19
Descripción ........................................................................................................................ 20
16. MÓDULO SENSOR ULTRASÓNICO ............................................................................ 20
Distribución en la tarjeta .................................................................................................... 20
Descripción ........................................................................................................................ 20
17. MÓDULOS POTENCIÓMETRO DE PRECISIÓN, DAC Y TIMER .................................. 21
Distribución en la tarjeta .................................................................................................... 21

v
TARJETA ENTRENADORA FACFYM
Descripción general ............................................................................................................ 21
Módulo potenciómetro de precisión ................................................................................... 21
Módulo timer...................................................................................................................... 22
Módulo DAC...................................................................................................................... 22
18. MÓDULO MATRIZ LED MONOCROMÁTICA 8X8 ...................................................... 23
Distribución en la tarjeta .................................................................................................... 23
Descripción ........................................................................................................................ 23
19. MÓDULO SENSOR DE HUMEDAD ............................................................................. 24
Distribución en la tarjeta .................................................................................................... 24
Descripción ........................................................................................................................ 24
20. MÓDULO DAC R – 2R............................................................................................ 25
Distribución en la tarjeta .................................................................................................... 25
Descripción ........................................................................................................................ 25
21. MÓDULO BUZZER ACTIVO ...................................................................................... 26
Distribución en la tarjeta .................................................................................................... 26
Descripción ........................................................................................................................ 26
22. MÓDULO DE DOS DISPLAYS MULTIPLEXADOS ........................................................ 27
Distribución en la tarjeta .................................................................................................... 27
Descripción ........................................................................................................................ 27
23. MÓDULO NTC........................................................................................................ 28
Distribución en la tarjeta .................................................................................................... 28
Descripción ........................................................................................................................ 28
24. MÓDULOS DE COMUNICACIÓN BLUETOOTH ........................................................... 29
Distribución en la tarjeta .................................................................................................... 29
Descripción ........................................................................................................................ 29
25. MÓDULO DE LECTURA – ESCRITURA DE EEPROM I2C .......................................... 29
Distribución en la tarjeta .................................................................................................... 29
Descripción ........................................................................................................................ 30
26. MÓDULO RTC DS1307 .......................................................................................... 30
Distribución en la tarjeta .................................................................................................... 30
Descripción ........................................................................................................................ 30
27. MÓDULO DE LECTURA – ESCRITURA DE EEPROM SPI .......................................... 31
Distribución en la tarjeta .................................................................................................... 31
Descripción ........................................................................................................................ 31
28. MÓDULO DE COMUNICACIÓN RS232 ..................................................................... 32
Distribución en la tarjeta .................................................................................................... 32
Descripción ........................................................................................................................ 32

vi
TARJETA ENTRENADORA FACFYM
29. MÓDULO SENSOR DE TEMPERATURA DS18B20 ..................................................... 33
Distribución en la tarjeta .................................................................................................... 33
Descripción ........................................................................................................................ 33
30. MÓDULO DE DETECCIÓN DE CRUCE POR CERO ....................................................... 33
Distribución en la tarjeta .................................................................................................... 33
Descripción ........................................................................................................................ 34
31. MÓDULO DE ALIMENTACIÓN PARA ETAPAS DE POTENCIA DC ............................... 35
Distribución en la tarjeta .................................................................................................... 35
Descripción ........................................................................................................................ 35
32. PROTECCIÓN CONTRA CORTOCIRCUITO PARA FUENTE SECUNDARIA ..................... 36
Distribución en la tarjeta .................................................................................................... 36
Descripción ........................................................................................................................ 36
33. MÓDULO BUZZER PASIVO....................................................................................... 37
Distribución en la tarjeta .................................................................................................... 37
Descripción ........................................................................................................................ 37
34. MÓDULO RELÉ OPTOACOPLADO ............................................................................. 38
Distribución en la tarjeta .................................................................................................... 38
Descripción ........................................................................................................................ 38
35. MÓDULO DE PWM PARA CARGAS DC ................................................................... 39
Distribución en la tarjeta .................................................................................................... 39
Descripción ........................................................................................................................ 39
36. MÓDULO DE PWM BASADA EN AC ........................................................................ 40
Distribución en la tarjeta .................................................................................................... 40
Descripción ........................................................................................................................ 40
37. MÓDULO ETAPAS DE POTENCIA PARA MOTORES DC .............................................. 41
Distribución en la tarjeta .................................................................................................... 41
Descripciones generales ..................................................................................................... 41
Descripción de la etapa para motores DC bipolares ........................................................... 42
Descripción de la etapa para motores DC unipolares ......................................................... 43
APÉNDICE ................................................................................................................................ 44
Reconocimiento de pines del C. I. PC817 .......................................................................... 44
Reconocimiento de pines de un LCD 16x2 ........................................................................ 44
Reconocimiento de pines del sensor LM35 ........................................................................ 45
Reconocimiento de pines de un teclado hexadecimal ......................................................... 45

1
TARJETA ENTRENADORA FACFYM
1. Protección contra cortocircuito para etapas de control
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la esquina superior izquierda de la tarjeta y se distingue por las leyendas
12F675, Vref VDD, +, – y RESET VDD.
Fuente: (Elaboración propia)
Después de conectar la tarjeta entrenadora a la fuente de alimentación principal (USB –
POWER), transcurrirán 30 segundos para que las etapas de control se activen, ya que,
Figura 97 Módulo 1 – Hardware
Figura 98 Descripción del Módulo 1

2
TARJETA ENTRENADORA FACFYM
durante ese intervalo de tiempo, el usuario deberá calibrar Vref VDD en función de la
corriente de cortocircuito (I) definida por él en función de la corriente necesaria para el
funcionamiento de las etapas de control, o en función de la corriente máxima que la
fuente de energía principal es capaz de suministrar.
Toda la corriente (I) necesaria para el funcionamiento de las etapas de control de la
tarjeta entrenadora, atraviesa siempre el resistor de 0.1 Ω.
Cuando ocurre un cortocircuito, accidental o intencional, toda la corriente que la fuente
de energía principal (USB – POWER) es capaz de suministrar, circulará
instantáneamente por el resistor de 0.1 Ω, resultando en la inmediata desactivación de
las etapas de control; esto según la previa configuración de Vref VDD.
La disipación de potencia del resistor de 0.1 Ω es de 1 W (1000 mW), es decir, el
máximo consumo de corriente es de 3 A, ya que P = (3 A)2 * (0.1 Ω) = 900 mW.
La corriente para la activación de las etapas de control (I) debe ser menor o igual que la
corriente máxima que la fuente de energía principal (USB – POWER) puede
suministrar; este último parámetro, el usuario debe conocerlo previamente para evitar
posibles averías.
Vref VDD es el voltaje de referencia para el PIC12F675, ya que este microcontrolador
compara indefinidamente Vref VDD con la tensión que cae en el resistor de 0.1 Ω, para
determinar si se ha producido o no un cortocircuito, o para determinar si la corriente
consumida por las etapas de control en un instante cualquiera, es mayor a la que se
definió anteriormente cuando se calibró Vref VDD.
Si el voltaje que cae en el resistor de 0.1 Ω es menor que Vref VDD, las etapas de
control permanecerán activas, pero si el voltaje que cae en dicho resistor es ligeramente
mayor, o igual que Vref VDD, las etapas de control se desactivarán automáticamente
por la conmutación de los contactos del relé, el LED VDD se apagará y el módulo se
reiniciará automáticamente 30 segundos después, siempre y cuando el cortocircuito
haya sido cancelado, de lo contrario, las etapas de control continuarán desactivadas.
Calibración de Vref VDD
Ya que V = R x I; luego, Vref VDD = (0.1 Ω) x I, siendo I en este caso, la corriente
definida por el usuario para las etapas de control de la tarjeta entrenadora.
Conecte las puntas de un multímetro digital al zócalo Vref VDD + –, para ello puede
conectar dos tipos de cable en serie, uno dupont macho en ambos extremos y otro con
pinzas caimán en ambos extremos; de este modo, el extremo libre del cable dupont se
conecta al zócalo de la tarjeta para medir Vref VDD + –, y con la otra pinza caimán se
sujeta la punta correspondiente del multímetro.
Gire el selector del multímetro hasta la escala de 20 VDC (si estuviera disponible).
Regule Vref VDD haciendo girar la perilla dorada del potenciómetro de precisión
denominado también Vref VDD; puede hacer esto con un destornillador perillero plano.
Una vez Vref VDD haya descendido por debajo de 2 V, ubique el selector del
multímetro en la escala de 2000 mV (2 V), si estuviera disponible.

3
TARJETA ENTRENADORA FACFYM
Si la fuente de alimentación principal, USB – POWER, es capaz de suministrar una
corriente I máxima de 0.5 A, entonces, Vref VDD = (0.1 Ω) x (0.5 A) = 50 mV; luego
debe regularse este voltaje con el potenciómetro Vref VDD.
Si la fuente de alimentación principal, USB – POWER, puede suministrar una corriente
I máxima de 1 A, entonces, Vref VDD = (0.1 Ω) x (1 A) = 100 mV; luego debe regularse
este voltaje con el potenciómetro Vref VDD.
El módulo está predeterminadamente regulado para una I = 0.5 A, es decir, 50 mV.
El usuario dispone de 30 segundos para regular Vref VDD después de haber conectado
la tarjeta entrenadora a la fuente de energía principal; si durante ese lapso no termina de
regular Vref VDD conforme a la corriente I requerida y las etapas de control encienden
con los parámetros incorrectos, deberá presionar el pulsador RESET VDD, y durante
el transcurso de otros 30 segundos, terminará de regular Vref VDD y esperar hasta que
las etapas de control se reinicien automáticamente con los parámetros requeridos.
2. Módulo Grabador PICkit 2 Clone
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte media inferior izquierda de la tarjeta y se distingue principalmente
por la leyenda 18F2550.
Por medio de este módulo, el puerto USB de la computadora del usuario será una de las
fuentes de energía principales de las etapas de control de la tarjeta entrenadora.
Figura 99 Módulo 2 – Hardware
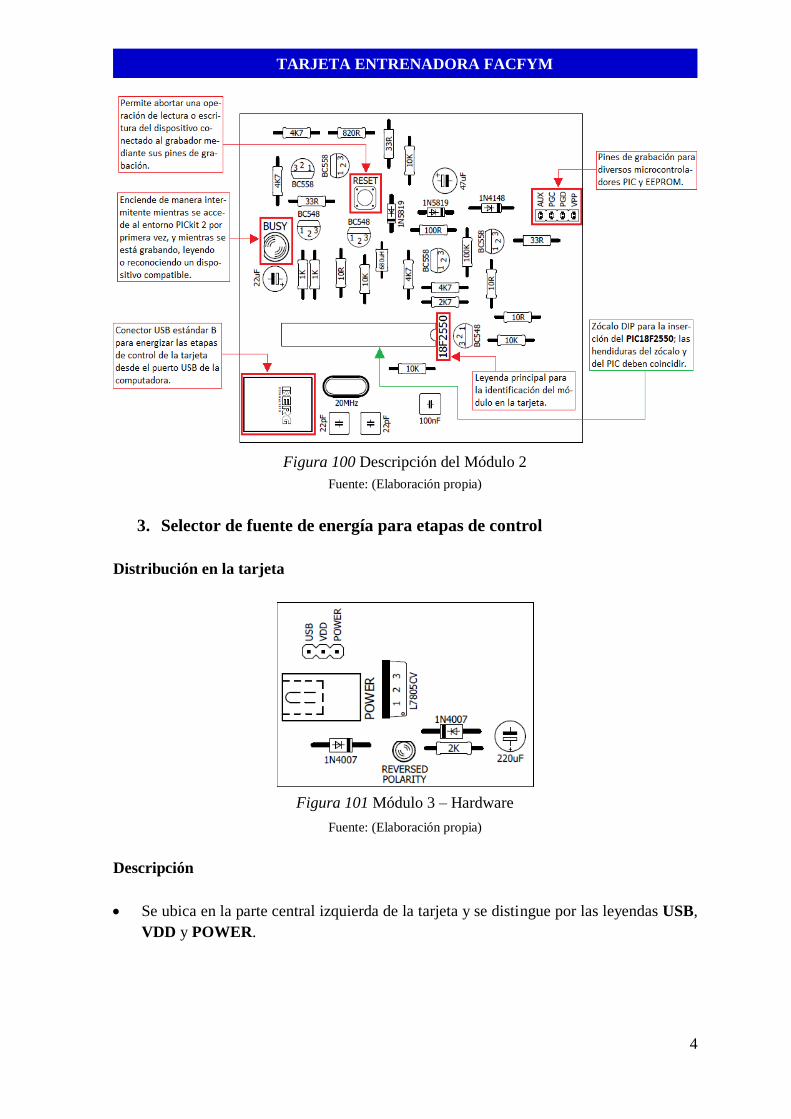
4
TARJETA ENTRENADORA FACFYM
Fuente: (Elaboración propia)
3. Selector de fuente de energía para etapas de control
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte central izquierda de la tarjeta y se distingue por las leyendas USB,
VDD y POWER.
Figura 100 Descripción del Módulo 2
Figura 101 Módulo 3 – Hardware

5
TARJETA ENTRENADORA FACFYM
Fuente: (Elaboración propia)
La tensión VDD energiza las etapas de control, y proviene del puerto USB de la
computadora, o de una fuente de tensión auxiliar (POWER).
Fuente: (Elaboración propia)
El módulo está diseñado para mantener la tensión en VDD lo más establemente posible
en 5 V, ya que mientras más etapas de control se activen, una insuficiencia de corriente
del puerto USB de la computadora del usuario, puede ocasionar caídas de tensión
significativas.
El voltaje de la fuente de energía auxiliar (POWER) debe regularse previamente entre
12 y 20 V, luego el circuito integrado L7805CV lo regulará a 5 V.
4. Grabador de Microcontrolador PIC12FXX
Distribución en la tarjeta
Figura 102 Descripción del Módulo 3
Figura 103 Selección de la fuente

6
TARJETA ENTRENADORA FACFYM
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte media superior izquierda de la tarjeta y puede identificarse
principalmente por la leyenda 8 PINES.
Solo sirve para grabar un PIC12FXXX, no para entrenarlo.
Fuente: (Elaboración propia)
Conexión con el grabador PICkit 2 Clone
Fuente: (Elaboración propia)
Figura 104 Módulo 4 – Hardware
Figura 105 Descripción del Módulo 4
Figura 106 Módulo 4 – Circuito auxiliar

7
TARJETA ENTRENADORA FACFYM
5. Entrenador de µC PIC16FXXX de 18 pines
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte central izquierda de la tarjeta y se distingue por la leyenda 18
PINES.
Fuente: (Elaboración propia)
Figura 107 Módulo 5 – Hardware
Figura 108 Descripción del Módulo 5

8
TARJETA ENTRENADORA FACFYM
El cristal se inserta en los pines RA6/OSC2 y RA7/OSC1 del zócalo CRISTAL,
mientras que el pin central (GND) es un pin conectado a tierra, el cual podrá usarse solo
cuando se trabaje con el oscilador interno del PIC (no se requiere cristal externo) si el
dispositivo posee dicho hardware internamente; en este último caso, los pines extremos
podrían usarse como entradas o salidas digitales si el modelo de PIC lo permite.
Las leyendas de los pines de E/S para el zócalo DIP, presentan una descripción genérica
de cada pin; por ello, si el usuario desea conocer más detalladamente las funciones de
cada pin del microcontrolador PIC que utilizará, debe revisar previamente su hoja de
datos.
Conexión con el Grabador PICkit 2
A continuación, se muestra la forma de conexión entre el Grabador PICkit 2 y el módulo
de 18 PINES para grabar el microcontrolador PIC16FXXX correspondiente.
Fuente: (Elaboración propia)
Figura 109 Módulo 5 – Circuito auxiliar

9
TARJETA ENTRENADORA FACFYM
6. Entrenador de µC PIC16FXXX de 28 pines
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte central derecha de la tarjeta y puede identificarse principalmente
por la leyenda 28 PINES.
Fuente: (Elaboración propia)
Figura 110 Módulo 6 – Hardware
Figura 111 Descripción del Módulo 6

10
TARJETA ENTRENADORA FACFYM
El cristal se inserta en los pines OSC1/CLKI y OSC2/CLKO del zócalo CRISTAL,
mientras que el pin central (GND) es un pin conectado a tierra, el cual podrá usarse solo
cuando el módulo 28 PINES no se utilice.
Las leyendas de los pines de E/S para el zócalo DIP, presentan una descripción genérica
de cada pin; por ello, si el usuario desea conocer más detalladamente las funciones de
cada pin del microcontrolador PIC que utilizará, debe revisar previamente su hoja de
datos.
Conexión con el Grabador PICkit 2
A continuación, se muestra la forma de conexión entre el Grabador PICkit 2 y el módulo
de 28 PINES para grabar el microcontrolador PIC16FXXX correspondiente.
Fuente: (Elaboración propia)
Figura 112 Módulo 6 – Circuito auxiliar

11
TARJETA ENTRENADORA FACFYM
7. Entrenador de µC PIC16FXXX de 40 pines
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte central de la tarjeta y se distingue por la leyenda 40 PINES.
Fuente: (Elaboración propia)
Figura 113 Módulo 7 – Hardware
Figura 114 Descripción del Módulo 7

12
TARJETA ENTRENADORA FACFYM
El cristal se inserta en los pines OSC1/CLKI y OSC2/CLKO del zócalo CRISTAL, el
pin GND está conectado a tierra y solo será útil cuando el módulo 40 PINES no se use.
Conexión con el Grabador PICkit 2
Fuente: (Propia)
8. Módulo de grabación de EEPROM I2C
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Este módulo se ubica en la parte superior izquierda de la tarjeta y se distingue por la
leyenda 24Cxx.
Figura 115 Módulo 7 – Circuito auxiliar
Figura 116 Módulo 8 - Hardware

13
TARJETA ENTRENADORA FACFYM
Fuente: (Elaboración propia)
Conexión con el Grabador PICkit 2
Fuente: (Elaboración propia)
Figura 117 Descripción del Módulo 8
Figura 118 Módulo 8 – Circuito auxiliar

14
TARJETA ENTRENADORA FACFYM
9. Módulo de nueve diodos LED
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte media inferior izquierda de la tarjeta y consta de 9 diodos LED de
5 mm dispuestos en forma de una ¨L¨ acostada.
Cada LED se distingue de los demás por su leyenda correspondiente: L1, L2, L3, L4,
L5, L6, L7, L8, L9.
Los LED son de cinco colores distintos: 1 blanco (L1), 2 azules (L2 y L6), 2 rojos (L3
y L7), 2 amarillos (L4 y L8) y 2 verdes (L5 y L9).
Fuente: (Elaboración propia)
Figura 119 Módulo 9 – Hardware
Figura 120 Descripción del Módulo 9

15
TARJETA ENTRENADORA FACFYM
10. Módulo de 5 pulsadores NO (Normally Open)
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte central inferior de la tarjeta.
Cada pulsador puede identificarse por su respectiva leyenda: S1, S2, S3, S4, S5.
Cada pulsador ofrece una señal de conmutación de alto a bajo cuando es accionado.
Fuente: (Elaboración propia)
11. Módulo alarma GSM
Distribución en la tarjeta
Fuente: (Elaboración propia)
Figura 121 Módulo 10 – Hardware
Figura 122 Descripción del Módulo 10
Figura 123 Módulo 11 – Hardware

16
TARJETA ENTRENADORA FACFYM
Descripción
Se ubica en la parte inferior izquierda de la tarjeta y se distingue por la leyenda PC817
ARRAY, CALL, HANG UP.
Fuente: (Elaboración propia)
12. Módulo LCD 16x2
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
El módulo se ubica en la parte superior central de la tarjeta y puede identificarse por la
leyenda Liquid Crystal Display.
Revise en el APÉNDICE el apartado Posición de LCD 16x2 para su correcta
inserción en el zócalo respectivo.
Figura 124 Descripción del Módulo 11
Figura 125 Módulo 12 – Hardware

17
TARJETA ENTRENADORA FACFYM
Fuente: (Propia)
13. Módulo CNY70, LDR, LM35 y BH1750
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción general
Los módulos según las dos imágenes mostradas en el apartado anterior se ubican, el
primero en la parte media inferior derecha de la tarjeta, y el segundo en la parte central
derecha de la tarjeta.
Figura 126 Descripción del Módulo 12
Figura 127 Módulo 13 – Hardware

18
TARJETA ENTRENADORA FACFYM
Fuente: (Elaboración propia)
Módulo CNY70
Se identifica por la leyenda CNY70.
El TRIMPOT de 10 KΩ es para calibrar el voltaje de referencia en el OPAMP.
La salida del comparador está conectado al pin CNY70 del zócalo; este pin se pondrá
en nivel alto cuanto el sensor detecte colores claros, y en nivel bajo cuanto el sensor
detecte colores oscuros.
Para la correcta inserción del sensor en su respectivo zócalo, las leyendas CNY70 del
zócalo y del sensor deben coincidir.
Módulos LDR
Ambos módulos se identifican por sus leyendas respectivas, LDR y BH1750.
El pin LDR proporcionará nivel bajo cuando no detecte luz, y nivel alto cuando la
detecte; el módulo no está diseñado para medir niveles de luz, ya que no está calibrado,
el segundo, luxómetro BH1750, es para la inserción del módulo externo y la
comunicación I2C con el microcontrolador seleccionado.
Módulo LM35
La inserción del sensor de temperatura LM35 debe realizarse en el mismo zócalo lineal
de 5 pines respetando su polaridad.
Revise el apartado Sensor LM35 – Diagrama de pines en el APÉNDICE para la
correcta inserción del sensor en el zócalo respectivo.
Figura 128 Descripción del Módulo 13

19
TARJETA ENTRENADORA FACFYM
14. Módulo de dos potenciómetros
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte media inferior izquierda de la tarjeta y se distingue por las leyendas
P1 y P2.
Fuente: (Elaboración propia)
15. Módulo teclado hexadecimal
Distribución en la tarjeta
Fuente: (Elaboración propia)
Figura 129 Módulo 14 – Hardware
Figura 130 Descripción del Módulo 14
Figura 131 Módulo 15 – Hardware

20
TARJETA ENTRENADORA FACFYM
Descripción
Se ubica en la parte inferior central de la tarjeta y puede identificarse por la leyenda
KEYBOARD 4X4.
La manipulación de las teclas se detectará por cambio de nivel de alto a bajo.
Los pines del teclado se identifican por sus respectivas leyendas, siendo F1, F2, F3, F4
las filas y C1, C2, C3, C4 las columnas.
Fuente: (Elaboración propia)
16. Módulo sensor ultrasónico
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
El módulo se ubica en la parte superior derecha de la tarjeta y puede identificarse
principalmente por la leyenda HC-SR04.
Figura 132 Descripción del Módulo 15
Figura 133 Módulo 16 – Hardware

21
TARJETA ENTRENADORA FACFYM
Fuente: (Elaboración propia)
17. Módulos potenciómetro de precisión, DAC y TIMER
Distribución en la tarjeta
Fuente: (Propia)
Descripción general
Se ubica en la parte media inferior derecha de la tarjeta y consta de 3 módulos descritos
a continuación.
Módulo potenciómetro de precisión
Este módulo se identifica por la leyenda P3.
Genera una variación de voltaje más precisa que aquella que proporciona un TRIMPOT.
El pin que proporciona la señal de salida del módulo se denomina P3.
Figura 135 Módulo 17 – Hardware
Figura 134 Descripción del Módulo 16

22
TARJETA ENTRENADORA FACFYM
Fuente: (Propia)
Módulo timer
Este módulo se identifica principalmente por la leyenda NE555N y TMR.
El C. I. NE555N está configurado en modo astable para la generación de pulsos a una
frecuencia específica que dependerá del valor de los resistores instalados y el capacitor
de 100 nF embebido; por ello, el módulo dispone de zócalos adecuados para la inserción
de cada uno de los resistores, distinguiéndose cada zócalo mediante su respectiva
leyenda: Ra y Rb.
La salida del TIMER está conectada al pin TIMER del zócalo lineal; asimismo puede
apreciarse a través del LED con la leyenda TMR.
Módulo DAC
Este módulo se identifica principalmente por la leyenda DAC y posee un zócalo DIP
para la inserción del OPAMP LM358.
La función principal de este módulo es convertir una señal PWM de frecuencia y ciclo
de trabajo específicos, en una señal analógica de amplitud variable linealmente en el
tiempo.
La entrada y salida del DAC están conectadas a los pines DAC (I) y DAC (O) del zócalo
lineal respectivamente.
Figura 136 Descripción del Módulo 17

23
TARJETA ENTRENADORA FACFYM
18. Módulo matriz LED monocromática 8x8
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte superior derecha de la tarjeta y puede identificarse principalmente
por la leyenda MATRIX LED 8x8 23088A/B; y sus pines se identifican con las
leyendas F y C, F para las filas y C las columnas.
Las salidas del registro de desplazamiento 74HC164 están conectadas a las filas.
Fuente: (Propia)
Figura 137 Módulo 18 – Hardware
Figura 138 Descripción del Módulo 18

24
TARJETA ENTRENADORA FACFYM
19. Módulo sensor de humedad
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
El módulo se ubica en la parte superior derecha de la tarjeta y puede distinguirse por la
leyenda YL-69.
El módulo consta de dos zócalos lineales, uno para la inserción del módulo YL-69 (4
pines) y otro para la conexión entre el módulo y el microcontrolador PIC.
Los pines D0 y A0 proporcionan la señal de salida del módulo, y puede ser de dos tipos,
digital o analógica, respectivamente.
Fuente: (Elaboración propia)
Figura 139 Módulo 19 – Hardware
Figura 140 Descripción del Módulo 19

25
TARJETA ENTRENADORA FACFYM
20. Módulo DAC R – 2R
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte inferior derecha de la tarjeta y posee la leyenda DAC R – 2R.
Los pines B0 – B7 del zócalo representan los bits de datos de la señal digital proveniente
del puerto del microcontrolador PIC, siendo B0 el LSB y B7 el MSB.
El pin OUT del zócalo proporciona la señal de salida analógica para ser visualizada a
través de un osciloscopio, mas no para alimentar una carga.
Fuente: (Elaboración propia)
Figura 141 Módulo 20 – Hardware
Figura 142 Descripción del Módulo 20

26
TARJETA ENTRENADORA FACFYM
21. Módulo buzzer activo
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte inferior central de la tarjeta y puede identificarse por la leyenda
BUZZER.
El pin BUZZER + se conectará al microcontrolador PIC mediante un cable para la
generación de tonos audibles de distintas frecuencias.
El pin BUZZER + también puede conectarse directamente a un pin VDD para verificar
el buen estado del buzzer, es decir, si emite o no sonido.
Fuente: (Elaboración propia)
Figura 143 Módulo 21 – Hardware
Figura 144 Descripción del Módulo 21

27
TARJETA ENTRENADORA FACFYM
22. Módulo de dos displays multiplexados
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte inferior de la tarjeta y puede identificarse principalmente por las
leyendas 74LS47, D1, D2 y posee dos zócalos, uno de tipo DIP para la inserción del C.
I. 74LS47, y otro lineal para la conexión cableada entre el módulo y el microcontrolador
PIC.
Fuente: (Elaboración propia)
Figura 145 Módulo 22 – Hardware
Figura 146 Descripción del Módulo 22

28
TARJETA ENTRENADORA FACFYM
Los pines del zócalo lineal tienen las siguientes funciones:
D1, D2 permiten la activación o desactivación del display correspondiente.
A, B, C, D son las entradas binarias para el decodificador 74LS47.
PD es un pin opcional que indica el punto decimal del display seleccionado;
necesita un nivel lógico bajo para encenderse.
Los displays se activan con nivel alto y se desactivan con nivel bajo.
Ambos displays están multiplexados, por lo que solo debe activarse un display a la vez,
ya que si ambos se activan simultáneamente, los dos displays mostrarán el mismo dato.
23. Módulo NTC
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte central superior derecha de la tarjeta y puede identificarse por la
leyenda NTC.
El pin NTC provee la señal de salida del módulo y se pondrá a nivel alto cuando la
temperatura del NTC aumente por encima de cierto nivel, y se pondrá a nivel bajo
cuando disminuya por debajo de ese mismo nivel; el módulo no está calibrado, por lo
que no está diseñado para medir temperaturas.
Fuente: (Elaboración propia)
Figura 147 Módulo 23 – Hardware
Figura 148 Descripción del Módulo 23

29
TARJETA ENTRENADORA FACFYM
24. Módulos de comunicación bluetooth
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Estos módulos se ubican, uno en la parte central superior y otro en la parte media inferior
de la tarjeta, y ambos pueden identificarse por las leyendas HC-05.
Fuente: (Elaboración propia)
25. Módulo de lectura – escritura de EEPROM I2C
Distribución en la tarjeta
Fuente: (Elaboración propia)
Figura 149 Módulo 24 – Hardware
Figura 150 Descripción del Módulo 24
Figura 151 Módulo 25 – Hardware

30
TARJETA ENTRENADORA FACFYM
Descripción
Se ubica en la parte media inferior derecha de la tarjeta y se identifica por las leyendas
24CXX, M1 y M2, donde M1 es la primera EEPROM del módulo y tiene la dirección
física 0, mientras que M2 es la segunda EEPROM del módulo y tiene la dirección física
1.
SDA es la línea de datos y SCL es la línea de reloj.
Fuente: (Elaboración propia)
26. Módulo RTC DS1307
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte inferior derecha de la tarjeta y se identifica por la leyenda DS1307.
SDA es la línea de datos y SCL es la línea de reloj.
Figura 152 Descripción del Módulo 25
Figura 153 Módulo 26 – Hardware

31
TARJETA ENTRENADORA FACFYM
Fuente: (Elaboración propia)
27. Módulo de lectura – escritura de EEPROM SPI
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte media inferior derecha de la tarjeta y se distingue por las leyendas
25LCXX, M1 y M2, donde M1 es la primera EEPROM del módulo y M2 la segunda.
SDI y SDO son las líneas de datos, SCK es la línea de reloj y CS-M1 y CS-M2 son
líneas de selección de las EEPROM M1 y M2 respectivamente.
Fuente: (Elaboración propia)
Figura 154 Descripción del Módulo 26
Figura 155 Módulo 27 – Hardware
Figura 156 Descripción del Módulo 27

32
TARJETA ENTRENADORA FACFYM
28. Módulo de comunicación RS232
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la esquina inferior derecha de la tarjeta y puede identificarse principalmente
por el conector DB9 hembra.
En el zócalo lineal, los pines T1IN y R1OUT permiten el intercambio de información
entre el microcontrolador y la computadora, el pin GND es solo un pin conectado a
tierra.
Fuente: (Elaboración propia)
Figura 157 Módulo 28 – Hardware
Figura 158 Descripción del Módulo 27

33
TARJETA ENTRENADORA FACFYM
29. Módulo sensor de temperatura DS18B20
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte inferior derecha de la tarjeta y puede identificarse principalmente
por la leyenda DS18B20.
Fuente: (Elaboración propia)
30. Módulo de detección de cruce por cero
Distribución en la tarjeta
Fuente: (Elaboración propia)
Figura 159 Módulo 29 – Hardware
Figura 160 Descripción del Módulo 29
Figura 161 Módulo 30 – Hardware

34
TARJETA ENTRENADORA FACFYM
Descripción
Se ubica en la parte inferior central de la tarjeta y se identifica principalmente por las
leyendas PIC OUTPUT, 74HC14N y dos borneras con las leyendas LOAD AC y 220
AC.
En el zócalo lineal de cuatro pines, las funciones de cada pin se describen a
continuación:
En el zócalo lineal de cuatro pines, las funciones de cada pin se describen a
continuación:
RECTIFIER: Con fines de visualización a través de un osciloscopio de la señal de
salida del puente rectificador 2W08.
CROSSING FOR ZERO (dos pines): Uno para la inserción del cable que se
conecta al microcontrolador y otro con fines de visualización en un osciloscopio.
LOAD AC: Con fines de visualización a través de un osciloscopio.
La carga AC (LOAD AC), por motivos de seguridad, debe ser preferentemente
resistiva, por ejemplo, un bombillo.
Fuente: (Elaboración propia)
Figura 162 Descripción del Módulo 30

35
TARJETA ENTRENADORA FACFYM
31. Módulo de alimentación para etapas de potencia DC
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte superior izquierda de la tarjeta y puede identificarse principalmente
por las leyendas VCC y REVERSED POLARITY.
Fuente: (Elaboración propia)
Figura 163 Módulo 31 – Hardware
Figura 164 Descripción del Módulo 31
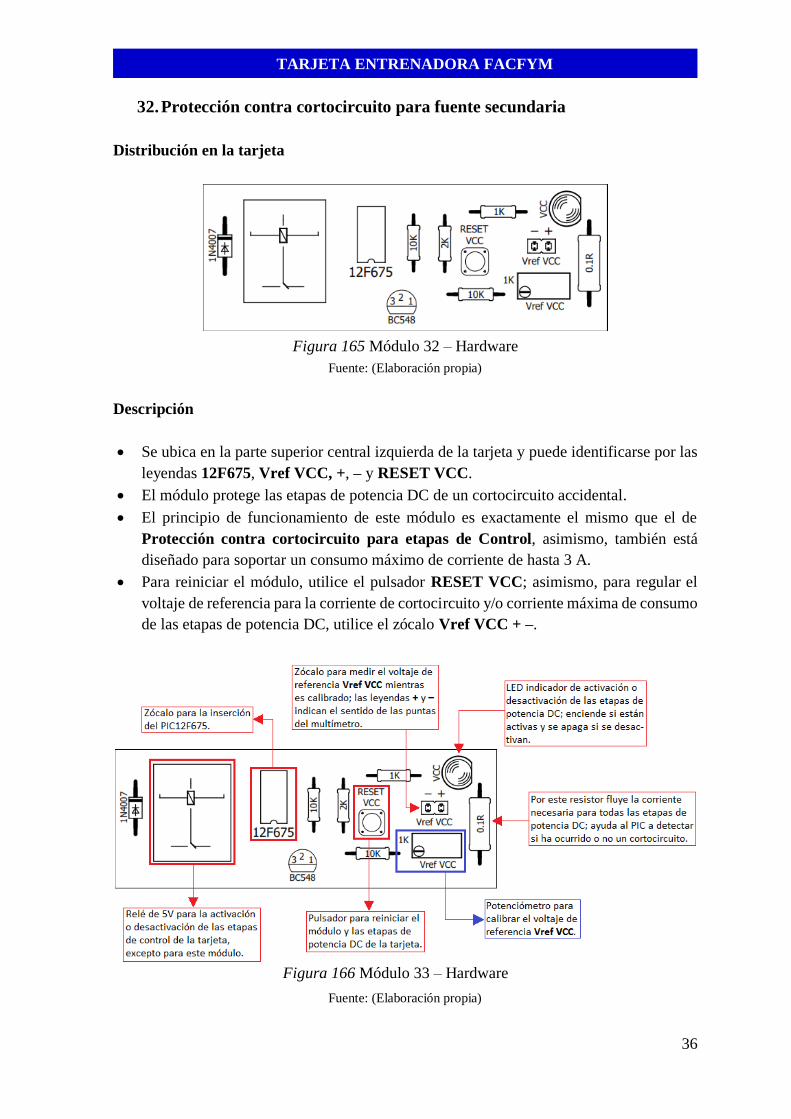
36
TARJETA ENTRENADORA FACFYM
32. Protección contra cortocircuito para fuente secundaria
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la parte superior central izquierda de la tarjeta y puede identificarse por las
leyendas 12F675, Vref VCC, +, – y RESET VCC.
El módulo protege las etapas de potencia DC de un cortocircuito accidental.
El principio de funcionamiento de este módulo es exactamente el mismo que el de
Protección contra cortocircuito para etapas de Control, asimismo, también está
diseñado para soportar un consumo máximo de corriente de hasta 3 A.
Para reiniciar el módulo, utilice el pulsador RESET VCC; asimismo, para regular el
voltaje de referencia para la corriente de cortocircuito y/o corriente máxima de consumo
de las etapas de potencia DC, utilice el zócalo Vref VCC + –.
Fuente: (Elaboración propia)
Figura 165 Módulo 32 – Hardware
Figura 166 Módulo 33 – Hardware

37
TARJETA ENTRENADORA FACFYM
La disipación de potencia máxima (P) del resistor de 0.1Ω es de 1 W (1000 mW).
La corriente máxima de consumo debe ser menor o igual a la corriente de cortocircuito;
y ambas deben ser menores a la corriente máxima que pueda proporcionar la fuente de
alimentación empleada.
33. Módulo buzzer pasivo
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la esquina superior derecha de la tarjeta y puede identificarse principalmente
por la leyenda SPEAKER (Z=8R, P=0.5W).
El parlante (SPEAKER) debe ser de la impedancia (Z) y potencia (P) indicadas en la
leyenda principal.
En el pin IN debe insertarse el cable proveniente del microcontrolador con la señal de
frecuencia correspondiente.
Fuente: (Propia)
Figura 167 Descripción del Módulo 32
Figura 168 Descripción del Módulo 33

38
TARJETA ENTRENADORA FACFYM
34. Módulo relé optoacoplado
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la esquina inferior izquierda de la tarjeta y puede identificarse por las leyendas
RELAY, PC817, 220 VAC y LOAD AC.
Fuente: (Elaboración propia)
Figura 169 Módulo 34 – Hardware
Figura 170 Descripción del Módulo 34
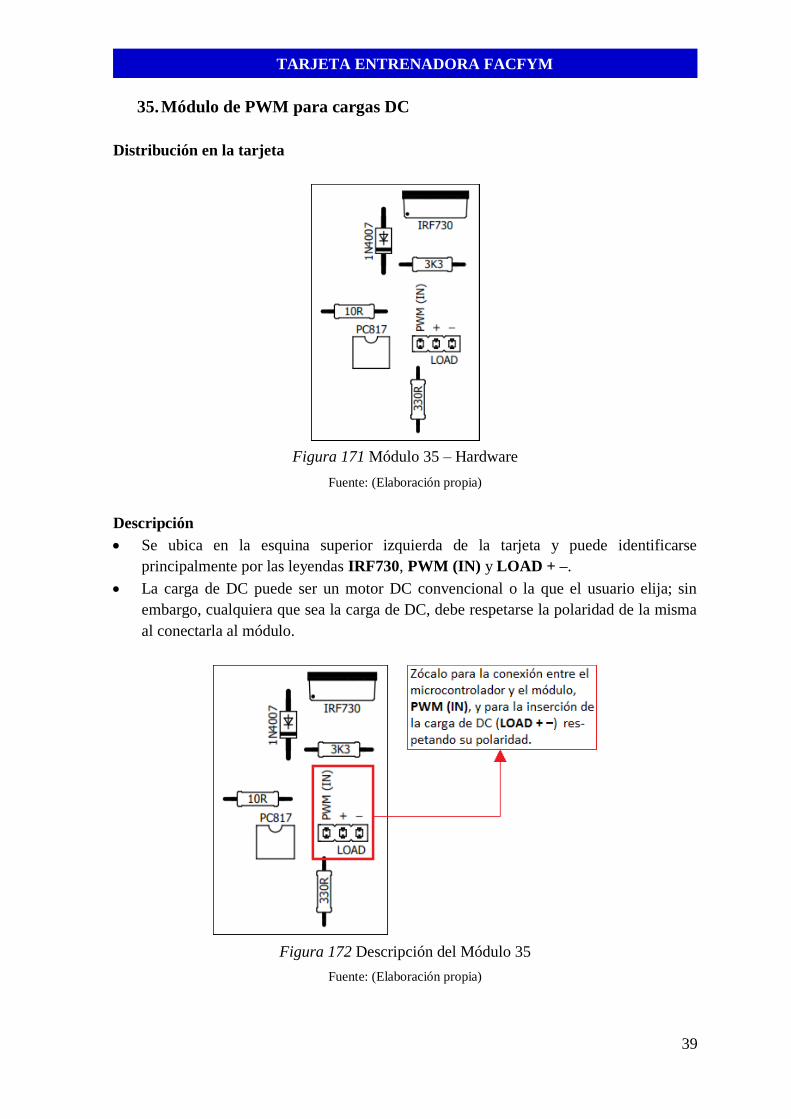
39
TARJETA ENTRENADORA FACFYM
35. Módulo de PWM para cargas DC
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Se ubica en la esquina superior izquierda de la tarjeta y puede identificarse
principalmente por las leyendas IRF730, PWM (IN) y LOAD + –.
La carga de DC puede ser un motor DC convencional o la que el usuario elija; sin
embargo, cualquiera que sea la carga de DC, debe respetarse la polaridad de la misma
al conectarla al módulo.
Fuente: (Elaboración propia)
Figura 171 Módulo 35 – Hardware
Figura 172 Descripción del Módulo 35

40
TARJETA ENTRENADORA FACFYM
36. Módulo de PWM basada en AC
Distribución en la tarjeta
Fuente: (Elaboración propia)
Descripción
Fuente: (Elaboración propia)
Figura 173 Módulo 36 – Hardware
Figura 174 Descripción del Módulo 36

41
TARJETA ENTRENADORA FACFYM
Se ubica en la parte superior derecha de la tarjeta y puede identificarse principalmente
por las leyendas IRF730, PWM (AC), 220 VAC y LOAD AC.
En este módulo las tierras de alterna y de la fuente de tensión secundaria (GND2) están
unidas; por ello, deben tomarse medidas de precaución.
37. Módulo etapas de potencia para motores DC
Distribución en la tarjeta
Fuente: (Elaboración propia)
Fuente: (Elaboración propia)
Descripciones generales
El módulo de la primera imagen se ubica en la parte superior izquierda de la tarjeta y
puede identificarse principalmente por las leyendas PC817 ARRAY y UNIPOLAR.
El módulo de la segunda imagen se ubica en la parte central superior de la tarjeta y
puede identificarse principalmente por las leyendas PC817 ARRAY y BIPOLAR.
Ambos módulos pueden ser usados también para motores DC convencionales.
Figura 175 Módulo 37 – Hardware Bipolar
Figura 176 Módulo 37 – Hardware Unipolar

42
TARJETA ENTRENADORA FACFYM
Descripción de la etapa para motores DC bipolares
Fuente: (Elaboración propia)
Figura 177 Descripción del Módulo 37 – Bipolar

43
TARJETA ENTRENADORA FACFYM
Descripción de la etapa para motores DC unipolares
Fuente: (Elaboración propia)
Figura 178 Descripción del Módulo 37 – Unipolar

44
APÉNDICE
Reconocimiento de pines del C. I. PC817
Fuente: (UGE electronics uge-one.com, 2018) 1
Reconocimiento de pines de un LCD 16x2
Fuente: (Elaboración propia)
1 La imagen fue editada por el Bach. Renzo Petrozzi Puse
Figura 179 Reconocimiento de Pines del C. I. PC817
Figura 180 Reconocimiento de pines del LCD 16x2

45
TARJETA ENTRENADORA FACFYM
Reconocimiento de pines del sensor LM35
Fuente: (PROYECTO DE RFID EN UPJR.EDU.MX, 2018) 2
Reconocimiento de pines de un teclado hexadecimal
Fuente: (Luis, 2016) 3
2 La imagen fue editada por el Bach. Renzo Petrozzi Puse 3 La imagen fue editada por el Bach. Renzo Petrozzi Puse
Figura 181 Reconocimiento de Pines del Sensor LM35
Figura 182 Reconocimiento de Pines de un Teclado Hexadecimal

Anexo B – Códigos de Programación en MPLAB

157
1. ENCENDIDO DE UN LED
Descripción
Este programa consiste en encender un LED conectado al pin RB0 del PIC16F628A; en
este caso, ya que el pin RB0 “genera” la señal para el encendido del LED, el pin RB0 debe
programarse como “salida”.
Código de programación
#INCLUDE<P16F628A.INC> ;Librería del PIC
__CONFIG 0x3F21 ;Cristal XT de 4 MHz, RA5 = MCLR
ORG 0x00 ;Vector de RESET –> Esta línea de programa es necesaria, ya que
;cuando el PIC sufre un RESET, el Contador de Programa (PC)
;saltará a esta dirección de memoria de programa y todo el código se
;ejecutará nuevamente desde INICIO
INICIO
;Ingreso al Banco 1 para configurar TRISB, ya que este registro está en el Banco 1, también
;está en el Banco 3, pero en este caso lo haremos en el 1 (consulte la FIGURA 4-3 de la pág.
;19 del PDF de la hoja de datos del PIC16F628A); para ello la combinación de los bits
;STATUS<RP1:RP0> es: (RP1 = 0) y (RP0 = 1)
BCF STATUS,RP1 ;RP1 = 0
BSF STATUS,RP0 ;RP0 = 1
CLRF TRISB ;Borrar TRISB (todos los pines del PORTB son salidas)

158
;Regreso al Banco 0 para programar PORTB, ya que este registro está en el Banco 0, también
;está en el Banco 2, pero en este caso lo haremos en el 0; para ello la combinación de los bits
;STATUS<RP1:RP0> es: (RP1 = 0) y (RP0 = 1), aunque RP1 ya está en cero por la configu-
;ración anterior para acceder al Banco 1, por ello se borra solo el bit RP0 (RP0 = 0)
BCF STATUS,RP0 ;RP0 = 0 (RP1 se quedó en cero)
CLRF PORTB ;PORTB inicia en cero (todos sus bits inician apagados)
LED ;Etiqueta LED
BSF PORTB,0 ;Encender el pin RB0 (RB0 = 1)
GOTO LED ;Permanecer indefinidamente en LED, es decir, hacer un bucle
END ;Fin del programa
Conexión en la tarjeta entrenadora
Grabe el Archivo HEX correspondiente al código de programación en el PIC16F628A y
luego inserte el cristal de cuarzo de 4 MHz en el zócalo CRISTAL del módulo 18 PINES.
Figura 183 Encendido de un LED – Hardware

159
2. DETECCIÓN DE CRUCE POR CERO
Descripción
Este proyecto consiste en detectar el cruce por cero (0 V) de la señal sinusoidal de 220
VAC de la red eléctrica pública; el cruce por cero se detectará por medio de una interrupción
por cambio de nivel en el pin RB0/INT del PIC16F877A (40 PINES); de este modo, la tarea
a interrumpir será la de encender permanentemente un LED conectado al pin RB1, para ello
se usará el MÓDULO DE 9 DIODOS LED.
La interrupción ocasionará el parpadeo de un bombillo cada 500 ms, esto se hará a través
del pin RB2; se usará además el MÓDULO DE DETECCIÓN DE CRUCE POR CERO.
Código de programación
#INCLUDE<P16F877A.INC> ;Librería del PIC
__CONFIG 0x3F31 ;Oscilador XT de 4 MHz, MCLR externo
CBLOCK 0x20 ;Variables globales desde la dirección 0x20 de la SRAM del PIC
CONT1 ;Dirección 0x20 de la SRAM
CONT2 ;Dirección 0x21 de la SRAM
ENDC ;Cerrar bloque de variables globales
ORG 0x00 ;Dirección de RESET
GOTO INICIO ;Saltar a etiqueta INICIO
ORG 0x04 ;Vector de interrupción
GOTO INTERRUPCION ;Saltar a etiqueta INTERRUPCION

160
INICIO
;Ingreso al Banco 1 para configurar el registro TRISB: (RP1 = 0) y (RP0 = 1)
BCF STATUS,RP1 ;RP1 = 0
BSF STATUS,RP0 ;RP0 = 1
MOVLW 0x01 ;Solo el pin RB0 será entrada, mientras que los pines RB<7:1>
MOVWF TRISB ;serán salidas
MOVLW 0x90 ;Habilitar interrupciones globales y la interrupción externa por RB0
MOVWF INTCON
;Regreso al Banco 0 para programar el Puerto B: (RP1 = 0) y (RP0 = 0)
BCF STATUS,RP0 ;RP0 = 0 (RP1 se quedó en cero)
CLRF PORTB ;Limpiar inicialmente PORTB
LED
BSF PORTB,1 ;Encender pin RB1
GOTO LED ;Permanecer en LED
INTERRUPCION
BSF PORTB,2 ;Encender pin RB2
CALL DELAY_500ms ;Retardo de 500 ms
BCF PORTB,2 ;Apagar pin RB2
CALL DELAY_500ms ;Retardo de 500 ms
BCF INTCON,1 ;Limpiar bandera de interrupción externa por RB0
RETFIE ;Retorno de interrupción
DELAY_500ms
MOVLW D'239' ;Cargar el valor de 239 en decimal a la

161
MOVWF CONT1 ;variable global CONT1
PLoop0
MOVLW D'232' ;Cargar el valor de 232 en decimal a la
MOVWF CONT1 ;variable global CONT2
PLoop1
NOP ;Se consume un ciclo de instrucción
GOTO PDelL1 ;Saltar a etiqueta PDelL1
PDelL1
GOTO PDelL2 ;Saltar a etiqueta PDelL2
PDelL2
NOP ;Se consume un ciclo de instrucción
DECFSZ CONT2,1 ;CONT2 = CONT2 – 1 => ¿CONT2 = 0?
GOTO PLoop1 ;No => Saltar a etiqueta PLoop1
DECFSZ CONT1,1 ;Sí => CONT1 = CONT1 – 1 => ¿CONT1 = 0?
GOTO PLoop0 ;No => Saltar a etiqueta PLoop0
GOTO PDelL3 ;Sí => Saltar a etiqueta PDelL3
PDelL3
GOTO PDelL4 ;Saltar a etiqueta PDelL4
PDelL4
GOTO PDelL5 ;Saltar a etiqueta PDelL5
PDelL5
NOP ;Se consume un ciclo de instrucción
RETURN ;Retorno de subrutina
END ;Fin del programa

162
Conexión en la tarjeta entrenadora
Figura 184 Detección de Cruce por Cero – Hardware

Anexo C – Formato de Primera y Segunda Encuesta

1
Investigación Percepciones sobre el Aprendizaje de Programación de Microcontroladores Estudiantes del 7º y 8º Ciclo de la EPIE
Folio: __________
Entrevistador/a: _Bach. Renzo Petrozzi Puse – Bach. Luis Vílchez Castillo_ Fecha: ____/____/____
A continuación, encontrará una serie de preguntas destinadas a conocer su opinión sobre el nivel de aprendizaje en programación de Microcontroladores a lo largo del 6º Ciclo de la Carrera de Ingeniería Electrónica. Mediante esto queremos conocer lo que piensan los estudiantes de Ing. Electrónica como usted sobre esta temática. El cuestionario tiene cuatro secciones. Por favor lea las instrucciones al inicio de cada sección y conteste la alternativa que más se acerca a lo que usted piensa. Sus respuestas son confidenciales y serán reunidas junto a las respuestas de muchas personas que están contestando este cuestionario en estos días. Muchas gracias. SECCIÓN I: CONOCIMIENTOS
¿Cuál diría usted que es el nivel de conocimiento de las personas como usted frente a los siguientes temas? Evalué su nivel de conocimiento en una escala de 1 a 5, donde 1 es muy poco, 2 es poco, 3 es regular, 4 es bueno y 5 es muy bueno.
Por favor encierre en un círculo la alternativa que más se parece a lo que usted piensa.
A. Marcas de Microcontroladores
Tema
Nivel de conocimiento
Muy Poco
Poco Regular Bueno Muy Bueno
101. Microchip Technology Corp. 1 2 3 4 5
102. Atmel Corp. 1 2 3 4 5
103. Motorola Semiconductors Corp. 1 2 3 4 5
B. Lenguajes de Programación de Microcontroladores
Tema
Nivel de conocimiento
Muy Poco
Poco Regular Bueno Muy Bueno
104. Assembler 1 2 3 4 5
105. Lenguaje C 1 2 3 4 5
106. Arduino 1 2 3 4 5
107. Basic 1 2 3 4 5
C. Software de Grabación de Microcontroladores
Tema
Nivel de conocimiento
Muy Poco
Poco Regular Bueno Muy Bueno
108. Pickit 2 Programmer 1 2 3 4 5
109. Pickit 3 Programmer 1 2 3 4 5
110. WinPIC800 1 2 3 4 5
111. Arduino 1 2 3 4 5

2
SECCIÓN II: EXPERIENCIAS
Evalúe la problemática del curso “Sistemas Digitales II” de la EPIE en base a sus experiencias más recientes en una escala de 1 a 5, donde 1 es muy malo, 2 es malo, 3 es regular, 4 es bueno y 5 es muy bueno. Por favor encierre en un círculo la alternativa que más se parece a lo que usted piensa. A. Problemática del curso “Sistemas Digitales II” de la EPIE
Problemática
Nivel de satisfacción
Muy Malo
Malo Regular Bueno Muy Bueno
201. Desarrollo del curso 1 2 3 4 5
202. Proyección hacia el futuro 1 2 3 4 5
203. Aprendizaje adquirido a lo largo del curso 1 2 3 4 5
SECCIÓN III: INTERESES
Evalúe el nivel de mejoría que tendría el curso “Sistemas Digitales II” de la EPIE si el Laboratorio de Electrónica contara con cada uno de los elementos propuestos a continuación en una escala de 1 a 5, donde 1 es muy pobre, 2 es pobre, 3 es regular, 4 es bueno y 5 es muy bueno. Por favor encierre en un círculo la alternativa que más se parece a lo que usted piensa. A. Progreso del curso “Sistemas Digitales II” de la EPIE
Elementos a adquirir
Nivel de mejoría
Muy Pobre
Pobre Regular Bueno Muy Bueno
301. Tarjeta entrenadora basada en la familia PIC16FXXX con su respectivo manual de uso
1 2 3 4 5
302. Guías de programación en lenguaje Assembler mediante ejemplos de aplicaciones reales
1 2 3 4 5
SECCIÓN IV: OPINIONES
A continuación, encontrará una frase que muestra la opinión que distintas personas tienen sobre la programación de microcontroladores. Por favor señale su grado de acuerdo con esta frase, encerrando en un círculo la a lternativa que se acerca más a lo que usted piensa.
Opinión
Grado de Acuerdo
Muy de acuerdo
De acuerdo
Ni acuerdo ni desacuerdo
En desacuerdo
Muy en desacuerdo
401. No digas que eres un buen programador, cuando solo eres un buen buscador de códigos
1 2 3 4 5
402. El aprendizaje de programación de microcontroladores PIC resulta obsoleto ya que Arduino y otras tecnologías los han desfasado significativamente
1 2 3 4 5
Muchas Gracias

Anexo D – Formato de Tercera Encuesta

1
Investigación Percepciones sobre el Aprendizaje de Programación de Microcontroladores PIC16FXXX Estudiantes de la EPIE – UNPRG y Aficionados
Folio: __________
Entrevistador/a: Bach. Renzo Petrozzi Puse – Bach. Luis Vílchez Castillo Fecha: ____/____/____ A continuación, encontrará una serie de preguntas destinadas a conocer su opinión acerca de los beneficios que traería para su aprendizaje en programación de microcontroladores PIC y en solución de aplicaciones embebidas, el uso de la Tarjeta Entrenadora FACFYM. Sus respuestas son confidenciales y serán reunidas junto a las respuestas de muchas personas que están contestando este cuestionario el día de hoy. Muchas gracias.
Pregunta Sí No
¿Tiene usted alguna experiencia con los microcontroladores PIC16FXXX
de gama media de Microchip?
¿Cree usted que la Tarjeta Entrenadora FACFYM resultaría beneficiosa
para el aprendizaje en programación de microcontroladores PIC16FXXX
para los estudiantes de Ingeniería Electrónica?
¿Cree usted que el uso periódico de la Tarjeta Entrenadora FACFYM le
permitirá al estudiante (o usuario) mejorar sus habilidades para la
interpretación e implementación de sistemas digitales con PIC?
Conteste esta pregunta solo si pertenece a la EPIE – UNPRG:
¿Considera usted que la Tarjeta Entrenadora FACFYM sería una buena
herramienta para el desarrollo de los Cursos de Sistemas Digitales que se
imparten en la EPIE?
¿Está conforme con la infraestructura actual de la Tarjeta Entrenadora
FACFYM?
¿Cree usted que se deberían diseñar y fabricar nuevas y mejores versiones
a largo plazo de la Tarjeta Entrenadora FACFYM?
Conteste esta pregunta solo si pertenece a la EPIE – UNPRG:
¿Cree usted que la Escuela Profesional de Ingeniería Electrónica debería
invertir en la adquisición de la Tarjeta Entrenadora FACFYM?
¿Considera usted que el lenguaje de programación será decisivo para las
experiencias con la Tarjeta Entrenadora FACFYM?
Pregunta Buena Mala Regular
¿Cómo calificaría usted su experiencia con los
microcontroladores PIC16FXXX de gama media de
Microchip antes de usar la Tarjeta Entrenadora
FACFYM?
Pregunta Sí No
¿Considera usted que su experiencia con los microcontroladores
PIC16FXXX de gama media de Microchip mejoró mediante el uso de la
Tarjeta Entrenadora FACFYM?
¿Percibe usted alguna mejoría en su habilidad para conexionar circuitos
electrónicos y digitales luego de sus primeras experiencias con la Tarjeta
Entrenadora FACFYM?

Anexo E – Actas de entrega de material donado al Laboratorio de Electrónica


Anexo G – Diagrama esquemático de la Tarjeta Entrenadora FACFYM

Figura 185 Diagrama esquemático de la tarjeta entrenadora FACFYM