T E S I S...El saber de mis hijos hará mi grandeza UNIVERSIDAD DE SONORA División de Ciencias...
96
El saber de mis hijos hará mi grandeza” UNIVERSIDAD DE SONORA División de Ciencias Exactas y Naturales Programa de Licenciado en Matemáticas Algebrización de Campos Vectoriales En Dimensiones Bajas TESIS Que para obtener el título de: Licenciado en Matemáticas Presenta: Jorge Alberto Espindola Zepeda Director de Tesis: Dr. Martín Eduardo Frías Armenta Hermosillo, Sonora, México. 1 de Julio de 2015.
Transcript of T E S I S...El saber de mis hijos hará mi grandeza UNIVERSIDAD DE SONORA División de Ciencias...
El saber de mis hijoshará mi grandeza”
UNIVERSIDAD DE SONORADivisión de Ciencias Exactas y Naturales
Programa de Licenciado en Matemáticas
Algebrización de Campos Vectoriales En DimensionesBajas
T E S I S
Que para obtener el título de:
Licenciado en Matemáticas
Presenta:
Jorge Alberto Espindola Zepeda
Director de Tesis: Dr. Martín Eduardo Frías Armenta
Hermosillo, Sonora, México. 1 de Julio de 2015.

ii

SINODALES
Dr. Fernando Verduzca GonzálezUniversidad de Sonora
Dr. Guillermo Dávila RascónUniversidad de Sonora
Dr. Martín Eduardo Frías ArmentaUniversidad de Sonora
Dr. Elifalet López GonzálezUniversidad Autónoma de Ciudad Juárez


Contents
1 Módulos y álgebras 11.1 Grupos y anillos . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Módulos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Álgebras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Primera representación fundamental . . . . . . . . . . . . . . 151.5 Álgebras normales . . . . . . . . . . . . . . . . . . . . . . . . 181.6 K-álgebras de Banach . . . . . . . . . . . . . . . . . . . . . . 25
2 Diferenciabilidad 272.1 Diferencial de Fréchet . . . . . . . . . . . . . . . . . . . . . . 272.2 Diferenciabilidad en álgebras de Banach . . . . . . . . . . . . 35
2.2.1 Derivada newtoniana . . . . . . . . . . . . . . . . . . . 352.2.2 Derivada de Lorch . . . . . . . . . . . . . . . . . . . . 39
2.3 Relación entre la diferenciabilidad de Fréchet y la diferencia-bilidad de Lorch . . . . . . . . . . . . . . . . . . . . . . . . . 422.3.1 Cambio de base . . . . . . . . . . . . . . . . . . . . . . 42
2.4 Ecuaciones de Cauchy-Riemann en álgebras . . . . . . . . . . 46
3 Algebrización de sistema de ecuaciones diferenciales autónomo 513.1 Algebrización de campos vectoriales planares . . . . . . . . . 51
3.1.1 Factor algebrizante . . . . . . . . . . . . . . . . . . . . 613.2 Algebrización de campos vectoriales en el espacio . . . . . . . 66
4 Algebrización de sistema de ecuaciones diferenciales planaresno autónomos 71
v

vi CONTENTS

Introducción
Un sistema de dos ecuaciones diferenciales ordinarias es un conjunto de dosecuaciones diferenciales con dos funciones incógnitas y un conjunto de condi-ciones iniciales. Una solución del mismo es un conjunto de funciones difer-enciables que satisfacen todas y cada una de las ecuaciones del sistema. Demanera similar podemos definir los sistemas de tres ecuaciones diferencialesordinarias.
El teorema de existencia y unicidad de soluciones de ecuaciones difer-enciales ordinarias nos dice que dada cualquiera condición inicial, siempreexiste una solución definida de manera local, en este sentido siempre existesoluciones, pero no siempre se puede expresar en términos de funciones ele-mentales.
Loe métodos de Lie costituyen la herramienta más importante para re-solver sistemas de ecuaciones diferenciales ordinarias. Mediante estos méto-dos, se pueden encontrar soluciones de algunos sistemas de ecuaciones difer-enciales o se pueden encontrar primeras integrales, cuyas curvas de nivelcontienen a las curvas fase de las ecuaciones diferenciales correspondientes.
El matemático francés Henry Poincaré revolucionó el estudio de las ecua-ciones diferenciales mediante la introducción de los sistemas dinámicos. Comoel resultado de sus estudios se tiene que aunque los sistemas de ecuacionesdiferenciales modelan fenómenos deterministas, pequeñas variaciones en lascondiciones iniciales pueden implicar grandes diferencias en el compartamientofuturo, por lo que imposibilita la predicción. De esta manera se muestra queen sistemas deterministas, puede aparecer el caos. Los métodos cualitativosconstituyen herramientas que nos permiten entender el comportamiento delas soluciones de los sistemas de ecuaciones diferenciales, aunque estos sis-temas no se pueden resolver, en el sentido de expresar a las soluciones entérminos de funciones elementales, en general, los sistemas de ecuacionesdiferenciales ordinarias no se pueden resolver de esta manera.
El presente trabajo tiene como objetivo mostrar familias de dos ecua-
vii
viii CONTENTS
ciones diferenciales ordinarias, para las cuales se puede encontrar una primeraintegral, ya que se puede encontrar un factor integrante. Para una ecuacióndiferencial algebrizable (diferenciable en el sentido de Lorch), el productodel campo vectorial correspondiente por una constante del álgebra es unasimetría infinitesimal del campo inicial, de esta manera se pueden obtenersimetrías infinitesimales no triviales, que nos permiten encontrar factores in-tegrantes inversos, por lo tanto encontramos factores integrantes.
En general, para sistemas algebrizables no autónomos, se pueden en-contrar simetría infinitesimales, ya que los productos del campo vectorialasociado, por constantes del álgebra resultan simetrías infinetisimales, lascuales son no triviales cuando la constante del álgebra no es una constantereal por la identidad del álgebra.
En el caso no autónomo, los resultados de este trabajo pueden servirpara identificar si un sistema cuadrático no autónomo dado, es una ecuaciónde Riccati de tiempo complejo o equivalente a una ecuación de Ricatti detiempo complejo. Esto puede resultar interesante ya que para las ecuacionesdiferenciales de tiempo complejo, se han realizado diversas investigaciones.
En el cap’itulo 1 se definen los concceptos de álgebra que se utilizanen este trabajo, dando primeramente la definición de grupo hasta llegar adefinir K-álgebra de Banach. También definiremos lo que es un homomor-fismo y daremos la definición de un homomorfismo muy importante, que es,la primera representación fundamental de álgebras en espacio de matrices.Además daremos un resultado interesante, que es, la existencia y unicidaddel producto tensorial de módulos y de álgebras.
Para el segundo capítulo, se introduce la definición de diferenciabili-dad. Daremos, algunos resultados clásicos cuando se habla de diferencia-bilidad. También daremos algunos resultados importantes de las Ecuacionesde Cauchy-Riemann en álgebras, ya que estos resultados son importante parala algebrización de sistemas de ecuaciones diferenciales.
En el tercer capítulo, primeramente daremos a conocer la definición dealgebrización. En este capitulo trabajaremos con sistemas de ecuacionesdiferenciales en el plano y sistemas de ecuaciones diferenciales en el espa-cio, así que daremos algunos resultados para saber cuando un sistema deecuaciones diferenciales en el plano o en el espacio es algebrizable. Tambiéndaremos la definición de factor algebrizante y que debe cumplir para poder
CONTENTS ix
algebrizar algunos sistemas de ecuaciones diferenciales en el plano. Por úl-timo, en el capítulo cuatro trabajaremos con la algebrización de sistemas deecuaciones diferenciales planares no autónomo.
Este trabajo está principalmente basado en [2], [5], [6] y [9], las demásfueron usadas para consultas rápidas.

x CONTENTS

Chapter 1
Módulos y álgebras
En este capítulo introduciremos definiciones preliminares, como la defini-ción de módulo, la definición de álgebra y la definición de la primera repre-sentación fundamental de un álgebra en el espacio de matrices n por n, endonde n es la dimensión del álgebra. Uno de los resultados será la existenciay unicidad del producto tensorial de módulos.
1.1 Grupos y anillos
Primeramente, antes de definir módulo y álgebra, empezaremos definiendolo que es un grupo y un anillo, también daremos algunos ejemplos paraentender con mayor claridad.
Definición 1.1.1. Un conjunto no vacío de elementos G se dice que formaun grupo si en G esta definida una operación binaria, llamado producto ydenotada por (·) tal que:
1. a, b ∈ G implica que a · b ∈ G.
2. a, b, c ∈ G implica que a · (b · c) = (a · b) · c.
3. Existe un elemento e ∈ G tal que a · e = e · a = a.
4. Para todo a ∈ G existe un elemento a−1 ∈ G tal que a·a−1 = a−1·a = e.
Definición 1.1.2. Un grupo G se dice que es abeliano (o conmutativo)si para cualquier a, b ∈ G se tiene que : a · b = b · a.
Ejemplo 1.1.3. El conjunto de los enteros Z bajo la suma (+) es un grupoabeliano.
1. a, b ∈ Z implica que a + b ∈ Z por las propiedades de los enteros, yaque la suma de dos enteros es de nuevo un entero.
1

2 Módulos y álgebras
2. a, b, c ∈ Z implica que a+ (b+ c) = (a+ b) + c por las propiedades delos enteros.
3. Existe un elemento e = 0 ∈ Z tal que a+ 0 = 0 + a = a.
4. Para todo a ∈ Z existe un elemento a−1 = −a ∈ Z tal quea+ (−a) = (−a) + a = 0.
5. a, b ∈ Z se tiene que a+ b = b+a por las propiedadades de los enteros.
Ejemplo 1.1.4. El conjunto −1, 1 bajo la multiplicación usual de númerosreales es un grupo abeliano.
1. a, b ∈ G implica que a · b ∈ G.
* 1 · 1 = 1 ∈ −1, 1
* 1 · (−1) = −1 ∈ −1, 1
* (−1) · 1 = −1 ∈ −1, 1
* (−1) · (−1) = 1 ∈ −1, 1
2. −1, 1 es asociativa bajo (·) por la propiedad de los números reales.
3. Existe un elemento e = 1 ∈ −1, 1 tal que a · 1 = 1 · a = a.
4. Para todo a ∈ −1, 1 existe un elemento a−1 = a ∈ −1, 1 tal quea ·a = a ·a = 1, ya que cada elemento del conjunto −1, 1 es su propioinverso.
5. Del producto dado, vemos que se cumple la proppiedad asociativa, estoses, a · b = b · a. para todo a, b ∈ −1, 1.
Definición 1.1.5. Un conjunto no vacío R se dice que es un anillo si tienedos operaciones, denotadas por + y · tales que para cualesquiera a, b, c ∈ R :
1. a+ b ∈ R.

1.2. Módulos 3
2. a+ b = b+ a.
3. a+ (b+ c) = (a+ b) + c.
4. Existe un elemento 0 ∈ R tal que a+ 0 = 0 + a = a.
5. Para todo a ∈ G existe un elemento −a ∈ R tal que a + (−a) =(−a) + a = 0.
6. a · b ∈ R.
7. a · (b · c) = (a · b) · c
8. a · (b+ c) = a · b+ a · c, (b+ c) · a = b · a+ c · a.
Nota: Es decir, un grupo R es un anillo si cumple con las propiedades6, 7 y 8.
Definición 1.1.6. Un anillo R se dice que es un anillo con elementounitario si existe 1 ∈ R tal que paratoda a ∈ R se tiene que 1 ·a = a ·1 = a.
Definición 1.1.7. Un anillo R se dice que es un anillo commutativa sipara cualesquiera a, b ∈ R se tiene que a · b = b · a
Ejemplo 1.1.8. El conjunto de los enteros Z es un anillo conmutativo conunidad bajo las operaciones suma y multiplicación usuales de los enteros. Enel Ejemplo 1.1.3 vimos que los enteros son un grupo abeliano bajo la suma,por las propiedades de los enteros Z cumple con 6), 7), 8),por lo tanto Zes un anillo. Z es conmutativo bajo el producto · por las propiedades de losenteros, así que Z es un anillo conmutativo. El elemento unidad existe enZ y es el 1, 1 · a = a · 1 = a para toda a ∈ Z, por lo tanto Z es un anilloconmutativo con unidad.
Ejemplo 1.1.9. El conjunto de los enteros pares es un anillo conmutativobajo la suma y multiplicación de los enteros
Ejemplo 1.1.10. El conjunto de los racionales Q es un anillo conmutativocon unidad bajo la suma y multiplicación de los racionales.
1.2 Módulos
Los módulos juegan un papel fundamental en este trabajo, ya que son nece-sario para dar la definión de lo que entendemos por álgebra en este trabajo.También daremos la definición de homomorfismo de módulos.

4 Módulos y álgebras
Definición 1.2.1. Sea R un anillo cualquiera; un conjunto no vacío M sedice que es un R-módulo (o un módulo sobre R) siM es un grupo abelianobajo una operación +, con un producto por escalar, tal que para cada r ∈ Ry m ∈M existe un elemento rm ∈M de tal modo que se verifica:
1. r(a+ b) = ra+ rb,
2. r(sa) = (rs)a, y
3. (r + s)a = ra+ sa,
para cualesquiera a, b ∈M y r, s ∈ R
Definición 1.2.2. Sea M un R-módulo y sea 1 ∈ R tal que 1m = m, paratoda m ∈M , entonces M es un R-módulo con unidad.
Sea V un espacio vectorial sobre un campo F, tenemos que V cumple conlas definiciones, por lo tanto V es un F-módulo con unidad.
Ejemplo 1.2.3. El conjunto nZ×nZ de las parejas ordenadas (x, y), dondex y y son números múltiplo de n, sobre Z, es un Z-módulo, donde la sumade (x1, y1), (x2, y2) ∈ nZ× nZ y el producto por escalar z ∈ Z se define:
(x1, y1) + (x2, y2) = (x1 + x2, y1 + y2),
z(x1, y1) = (z · x1, z · y1).
Para todo (x1, y1), (x2, y2), (x3, y3) ∈ 2Z× 2Z se tiene que:
1. (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2), y como x1 + x2, y1 + y2 ∈ nZ,entonces (x1 + x2, y1 + y2) ∈ nZ× nZ.
2. (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2) = (x2 + x1, y2 + y1) = (y2, x2) +(x1, y1).
3. (x1, y1)+((x2, y2)+(x3, y3)) = (x1, y1)+(x2+x3, y2+y3) = (x1+x2+x3, y1 + y2 + y3) = (x1 + x2, y1 + y2) + (x3, y3) = ((x1, y1) + (x2, y2)) +(x3, y3).
4. Existe el neutro tal que (x, y) + (0, 0) = (x, y), como 0 ∈ nZ entonces(0, 0) ∈ nZ× nZ.
5. El inverso de (x, y) es (−x,−y) ya que (x, y) + (−x,−y) = (0, 0), ycomo −x,−y ∈ nZ entonces (−x,−y) ∈ nZ× nZ.

1.2. Módulos 5
Por lo tanto nZ × nZ es un grupo conmutativo bajo la suma. Ahoraveamos que cumple con las propiedades del producto por escalar.
Sea r, s ∈ Z y (x1, y1), (x2, y2) ∈ nZ× nZ:
1.
(r + s)(x1, y1) = ((r + s)x1, (r + s)y1) = (r · x1 + s · x1, r · y1 + s · y1)= (r · x1, r · y1) + (s · x1, s · y1) = r(x1, y1) + s(x1, y1).
2.
r((x1, y1) + (x2, y2)) = r(x1 + x2, y1 + y2) = (r(x1 + x2), r(y1 + y2))
= (r · x1 + r · x2, r · y1 + r · y2) = (r · x1, r · y1) + (r · x2, r · y2)= r(x1, y1) + r(x2, y2).
3.
(rs)(x1, y1) = ((rs) · x1, (rs) · y1) = (r · s · x1, r · s · y1)= r(s · x1, s · y1) = r(s(x1, y1)).
4.
1(x1, y1) = (1 · x1, 1 · y1) = (x1, y1).
Ejemplo 1.2.4. El conjuntos de las matrices de m filas con n columnas conentradas en R, es un R-módulo con la operación adición de matrices ymultiplicación por escalar de R, definidas:1)(Adición de matrices). Si A,B ∈Mn×m(R), entonces A+B es la matrizcuya entradas i, j está dada por [A+B]i,j = [A]i,j + [B]i,j .2)(Multiplicación de matrices por escalares). Si a ∈ R y A ∈ Mm×n(Z),entonces [aA] es la matriz cuya entrada i, j está dada por [aA]i,j = a[A]i,j.
Definición 1.2.5. Un homomorfismo de módulos es una función f :M1 −→ M2 entre los R-módulos M1 y M2 tal que si para todo r ∈ R ym,n ∈M1, se cumple
1. f(m+ n) = f(m) + f(n).
2. f(rm) = rf(m).

6 Módulos y álgebras
Si f es además inyectiva y suprayectiva decimos que f es un isomorfismo demódulos.
Ejemplo 1.2.6. Definamos la función f : 2Z× 2Z→M2×2(Z) como:
f(a, b) =
(a+ b 0
0 b
).
Veremos que es un homomorfismo de Z-módulos. Sea r ∈ Z y (a, b), (c, d) ∈2Z× 2Z :
1.
f ((a, b) + (c, d)) = f ((a+ c, b+ d)) =
((a+ c) + (b+ d) 0
0 b+ d
)=
(a+ b 0
0 b
)+
(c+ d 0
0 d
)= f(a, b) + f(c, d).
2.
f(r(a, b)) = f(ra, rb) =
(ra+ rb 0
0 rb
)= r
(a+ b 0
0 b
)= rf(a, b).
1.3 Álgebras
En esta sección daremos la definición de lo que entendemos en este trabajopor álgebra y de homomorfismo de álgebras, también se darán ejemplos deálgebras que son interesantes. Además hacemos la aclaración de que K,denotará al campo real R o al complejo C.
Definición 1.3.1. Sea M un R-módulos, y supongamos que existe una op-eración binaria definida entre elementos de M , (·, ·) : M ×M →M , tal quees bilineal con respecto a la suma, es decir, tal que para todo u, v, w ∈ M ,λ ∈ R:
1. u · (v + w) = u · v + u · w.
2. (v + w) · u = v · u+ w · u.
3. u · (λv) = (λu) · v = λ(u · v).
Entonces llamaremos A = (M, ·) álgebra sobre R o R-álgebra.

1.3. Álgebras 7
Ejemplo 1.3.2. Veamos que A = (R3,×) es un álgebra sobre R, donde ×denota el producto vectorial o producto cruz.
Sabemos que R3 es un espacio vectorial sobre R, esto quiere decir que R3
es un R-módulo, tenemos que el producto vectorial es distributivo y bilineal,por lo tanto tenemos que A es un R-álgebra.
Definición 1.3.3. Una R-álgebra asociativa conmutativa con unidado álgebra asocitiva conmutativa con unidad sobre un anillo conmu-tativo con unidad R es un R-módulo A con un producto, el cual es unatransformación bilineal A×A→ A denotada por (x, y)→ xy, de tal maneraque se tiene asociativilidad, conmutatividad y existe un elemento e ∈ A quesatisface ex = xe = x, para todo x ∈ A. A e se le llama la unidad de A.La bilinealidad de (x, y)→ xy implica que para todo x, y, z ∈ A y α ∈ R, setiene:
i) x(y + z) = xy + xz, (x+ y)z = xz + yz.
ii) α(xy) = (αx)y = x(αy).
La asociatividad implica que para todo x, y, z ∈ A, se tiene:
iii) x(yz) = (xy)z.
La conmutatividad implica que para todo x, y ∈ A, se tiene:
iv) xy = yx.
Conviene aclarar que en este trabajo a lo que nosotros llamaremos álge-bra es un álgebra asociativa, conmutativa con unidad.
Cuando un elemento a ∈ A se llama regular si existe a−1 ∈ A, tal quea−1a = aa−1 = e, donde e es la unidad de A, a−1 se llamael inverso de a, alconjunto de los elementos regulares lo denotaremos por G(A) . Si a ∈ A noes regular, entonces a se llama singular.
El conjunto G(A) es un grupo con respecto al producto del álgebra. Ten-emos que el producto es asociativo, que la identidad e está en G(A) y queexiste el inverso, lo único que falta ver es que es cerrado.
Sea u, v ∈ G(A), tenemos que u−1, v−1 ∈ G(A), además que (uv)(v−1u−1) =e entonces uv ∈ G(A). Por lo tanto tenemos que G(A) es un grupo.

8 Módulos y álgebras
Los siguientes ejemplos son interesante, en especial el Ejemplo 1.3.6,llamado el álgebra de los complejos, ya que veremos más adelante que esun álgebra normal.
Ejemplo 1.3.4. El R-módulo R2 es una R-álgebra con el producto:
(x1, y1)(x2, y2) = (x1x2, x1y2 + y1x2),
veamos que es bilineal, asociativa, conmutativa y existe la unidad. Sea(x1, y1), (x2, y2), (x3, y3) en R2 y α ∈ R , entonces
i)
(x1, y1)((x2, y2) + (x3, y3)) =(x1, y1)(x2 + x3, y2 + y3)
=(x1(x2 + x3), x1(y2 + y3) + y1(x2 + x3))
=(x1x2 + x1x3, x1y2 + x1y3 + y1x2 + y1x3)
=(x1x2, x1y2 + y1x2) + (x1x3, x1y3 + y1x3)
=(x1, y1)(x2, y2) + (x1, y1)(x3, y3),
((x1, y1) + (x2, y2))(x3, y3) =(x1 + x2, y1 + y2)(x3, y3)
=((x1 + x2)x3, (y1 + y2)x3 + (x1 + x2)y3)y3)
=(x1x3 + x2x3, y1x3 + y2x3 + x1y3 + x2y3)
=(x1x3, y1x3 + x2y3) + (x2x3, y2x3 + x1y3)
=(x1, y1)(x3, y3) + (x2, y2)(x3, y3),

1.3. Álgebras 9
ii)
α((x1, y1)(x2, y2)) =α(x1x2, x1y2 + y1x2)
=(αx1x2, α(x1y2 + y1x2))
=(αx1x2, αx1y2 + αy1x2)
=(αx1, αy1)(x2, y2)
=(α(x1, y1))(x2, y2),
α((x1, y1)(x2, y2)) =α(x1x2, x1y2 + y1x2)
=(αx1x2, α(x1y2 + y1x2))
=(αx1x2, αx1y2 + αy1x2)
=(x1αx2, x1αy2 + y1αx2)
=(x1, y1)(αx2, αy2)
=(x1, y1)(α(x2, y2)),
en i) y ii) tenemos que el producto es bilineal.
iii)
(x1, y1)((x2, y2)(x3, y3)) =(x1, y1)(x2x3, x2y3 + y2x3)
=(x1x2x3, x1(x2y3 + y2x3) + y1x2x3)
=(x1x2x3, x1x2y3 + x1y2x3 + y1x2x3)
=(x1x2x3, x1x2y3 + (x1y2 + y1x2)x3)
=(x1x2, x1y2 + y1x2)(x3, y3)
=((x1, y1)(x2, y2))(x3, y3),
en iii) tenemos que el producto es asociativo.

10 Módulos y álgebras
iv)
(x1, y1)(x2, y2) =(x1x2, x1y2 + y1x2)
=(x2x1, x2y1 + y2x1)
=(x2, y2)(x1, y1),
en iv) vemos que el producto es conmutativo.
v) La unidad es e = (1, 0) ∈ R2,(1, 0)(x, y) = (1x, 1y+0x) = (x, y), (x, y)(1, 0) = (x1, x0+y1) = (x, y).
Ejemplo 1.3.5. El R-módulo R2 es una R-álgebra, con el producto:
(x1, x2)(y1, y2) = (3
2x1y1+
1
2(x1y2+x2y1−x2y2),
3
2x2y2+
1
2(x1y2+x2y1−x1y1)),
donde la unidad es e = (1
2,1
2).
Ejemplo 1.3.6. (Complejos). El R-módulo R2 es una R-álgebra, con elproducto:
(x1, y1)(x2, y2) = (x1x2 − y1y2, x1y2 + x2y1),
donde la unidad es e = (1, 0). Denotaremos a esta álgebra como C.
El siguiente ejemplo es de nuestra interés, ya que en estás álgebras alge-brizaremos sistemas de ecuaciones planares en el capítulo tres.
Ejemplo 1.3.7. El R-módulo R2 es una R-álgebra, con alguno de los sigu-ientes productos:
I)· e1 e2e1 e1 e2e2 e2 −be1 + ae2
II)· e1 e2e1 −ae1 e1e2 e1 e2
III)· e1 e2e1 e1 0e2 0 e2

1.3. Álgebras 11
El siguiente ejemplo es de interés para nosostros, ya que en la Sección3.2 trabajeremos con los siguientes productos.
Ejemplo 1.3.8. R3 es un álgebra A = (R3, ·) donde · es alguno de lossiguientes tres productos
A)
· e1 e2 e3e1 e1 e2 e3e2 e2 −ae1 − ce2 − ee3 −be1 − de2 − fe3e3 e3 −be1 − de2 − fe3 −he1 − je2 − le3
B)
· e1 e2 e3e1 −ae1 − ce2 − ee3 e1 −be1 − de2 − fe3e2 e1 e2 e3e3 −be1 − de2 − fe3 e3 −he1 − je2 − le3
C)
· e1 e2 e3e1 −ae1 − ce2 − ee3 −be1 − de2 − fe3 e1e2 −be1 − de2 − fe3 −he1 − je2 − le3 e2e3 e1 e2 e3
Sabemos que R3 es un espacio vectorial, ahora lo que haremos es ver que A =(R3, ·) tiene estructura de álgebra con respecto al producto Tipo A. Tenemosque el producto entre elementos de A se define como (x, y, z), (u, v, w) =(xu− ayv− byw− bzv− hzw, xv+ yu− cyu− dyw− dzv− jzw, xw− eyv−fyw + zu− fzw − lzw), veamos que se cumple que es bilineal, asociativo yconmutativo.

12 Módulos y álgebras
i) Veamos que es bilieneal:
(x1, y1, z1)((x2, y2, z2) + (x3, y3, z3) =(x1, y1, z1)(x2 + x3, y2 + y3, z1 + z3)
(x1(x2 + x3)− ay1(y2 + y3)− by1(z2 + z3)
− bz1(y2 + y3)− hz1(z2 + z3),
x1(y2 + y3) + y1(x2 + x3)− cy1(y2 + y3)
− dy1(z2 + z3)− dz1(y2 + y3)− jz1(z2 + z3),
x1(z1 + z2)− ey1(y2 + y3)− fy1(z2 + z3)
+ z1(x2 + x3)− fz1(y2 + y3)− lz1(z2 + z3))
=(x1x2 − ay1y2 − by1z2 − bz1y2 − hz1z2,x1y2 + y1x2 − cy1y2 − dy1z1 − dz1y2 − jz1z2,x1z2 − ey1y2 − fy1z2 + z1x2 − fz1y2 − lz1z2)+ (x1x3 − ay1y3 − by1z3 − bz1y3 − hz1z3,x1y3 + y1x3 − cy1y3 − dy1z3 − dz1y3 − jz1z3,x1z3 − ey1y3 − fy1z3 + z1x3 − fz1y3 − lz1z3),
y
α((x1, y1, z1)(x2, y2, z2)) =α(x1x2 − ay1y2 − by1z2 − bz1y2 − hz1z2,x1y2 + y1x2 − cy1y2 − dy1z2 − dz1y2 − jz1z2,x1z2 − ey1y2 − fy1z2 + z1x2 − fz1y2 − lz1z2)
=(αx1x2 − aαy1y2 − bαy1z2 − bαz1y2 − hαz1z2,αx1y2 + αy1x2 − cαy1y2 − dαy1z2 − dαz1y2 − jαz1z2,αx1z2 − eαy1y2 − fαy1z2 + αz1x2 − fαz1y2 − lαz1z2)
=(αx1, αy1, αz1)(x2, y2, z2) = (α(x1, y1, z1))(x2, y2, z2),
α((x1, y1, z1)(x2, y2, z2)) =α(x1x2 − ay1y2 − by1z2 − bz1y2 − hz1z2,x1y2 + y1x2 − cy1y2 − dy1z2 − dz1y2 − jz1z2,x1z2 − ey1y2 − fy1z2 + z1x2 − fz1y2 − lz1z2)
=(αx1x2 − aαy1y2 − bαy1z2 − bαz1y2 − hαz1z2,αx1y2 + αy1x2 − cαy1y2 − dαy1z2 − dαz1y2 − jαz1z2,αx1z2 − eαy1y2 − fαy1z2 + αz1x2 − fαz1y2 − lαz1z2)
=(x1, y1, z1)(αx2, αy2, αz2) = (x1, y1, z1)(α(x2, y2, z2)).
1.3. Álgebras 13
ii) Veamos que es asociativo:
(x1, y1, z1)((x2, y2, z2)(x3, y3, z3) =(x1, y1, z1)(x2x3 − ay2y3 − by2z3 − bz2y3 − hz2z3,x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3,x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3)
=(x1(x2x3 − ay2y3 − by2z3 − bz2y3 − hz2z3)− ay1(x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3)− by1(x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3)− bz1(x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3)− hz1(x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3),y1(x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3)+ y1(x2x3 − ay2y3 − by2z3 − bz2y3 − hz2z3)− cy1(x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3)− dy1(x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3)− dz1(x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3)− jz1(x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3),x1(x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3)− ey1(x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3)− fy1(x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3)+ z1(x2x3 − ay2y3 − by2z3 − bz2y3 − hz2z3)− fz1(x2y3 + y2x3 − cy2y3 − dy2z3 − dz2y3 − jz2z3)− lz1(x2z3 − ey2y3 − fy2z3 + z3x3 − fz2y3 − lz2z3))
=(x1x2 − ay1y2 − by1z2 − bz1y2 − hz1z2,x1y2 + y1x2 − cy1y2 − dy1z2 − dz1y2 − jz1z2,x1z2 − ey1y2 − fy1z2 + z1x2 − fz1y2 − lz1z2)(x3, y3, z3)
=((x1, y1, z1)(x2, y2, z2))(x3, y3, z3)

14 Módulos y álgebras
iii) Por úlitmo veamos que es conmutativa
(x1, y1, z1)(x2, y2, z2) =(x1x2 − ay1y2 − by1z2 − bz1y2 − hz1z2,x1y2 + y1x2 − cy1y2 − dy1z1 − dz1y2 − jz1z2,x1z2 − ey1y2 − fy1z2 + z1x2 − fz1y2 − lz1z2)
=(x2x1 − ay2y1 − by2z1 − bz2y1 − hz2z1,x2y1 + y2x1 − cy2y1 − dy2z1 − dz1y1 − jz2z1,x2z1 − ey2y1 − fy2z1 + z2x1 − fz2y1 − lz2z1)
=(x2, y2, z2)(x1, y1, z1)
Definición 1.3.9. Un homomorfismo de R-álgebras es una función ψ :A → A
′ entre las R-álgebras A y A′ , si para todo a, a1, a2 ∈ A y λ ∈ R, secumple:
i) ψ(a1 + a2) = ψ(a1) + ψ(a2).
ii) ψ(λa) = λψ(a).
iii) ψ(a1a2) = ψ(a1)ψ(a2).
si e y e′ son las unidades de A y A′ , entonces:
iv) ψ(e) = e′.
Además, si ψ es inyectiva y sobreyectiva, se dice que ψ es un isomorfismode R-álgebras y que A y A′ son R-álgebras isomorfas.
Ejemplo 1.3.10. Sea f una función, que va del álgebra del Ejemplo 1.3.4al álgebra de las matrices M2(R), que se define como:
f(x, y) =
(x 0y x
).
La función es un homomorfismo de R-álgebras, como verificaremos a contin-uación. Sea r ∈ R y (x, y), (w, z) ∈ R2 :

1.4. Primera representación fundamental 15
i)
f((x, y) + (w, z)) = f(x+ w, y + z) =
(x+ w 0y + z x+ w
)=
(x 0y x
)+
(w 0z w
)= f(x, y) + f(w, z).
ii)
f(r(x, y)) = f(rx, ry) =
(rx 0ry rx
)= r
(x 0y x
)= rf(x, y).
iii)
f((x, y)(w, z))) = f(xw, xz + yw) =
(xw 0
xz + yw xw
)=
(x 0y x
)(w 0z w
)= f(x, y)f(w, z).
iv)
f(e) = f(1, 0) =
(1 00 1
)= e
′.
1.4 Primera representación fundamental
Un isomorfismo de R-álgebras es la primera representación fundamental deálgebra en un espacio de matrices, que se dará a conocer en la siguientesección. Estas representaciones fundamentales nos ayudan a entender a lasK-álgebra, ya que mediante éstas el producto de álgebras corresponde aproductos de matrices. También las representaciones fundamentales seránimportante para la algebrización de sistema de ecuaciones diferenciales.
Dada una base β = w1, w2, ..., wm de un álgebra A de dimensión m,el producto de dos elementos wi y wj pertenece a A, por lo tanto se puedeexpresar como una combinación lineal de los elementos de β, es decir,
wiwj =
m∑k=1
cijkwk

16 Módulos y álgebras
a los escalares cijk se les llama constantes de estructuras asociadas a β.
Denotaremos por Rj , para 1 6 j 6 m, a la matriz dada por
Rj =
cj11 · · · cjm1...
. . ....
cj1m · · · cjmm
.
La primera representación fundamental de A asociada a la base β es elisomorfismo de álgebras Rβ : A→Mm(K) definido por
Rβ : wj → Rj
para 1 6 j 6 m.
Ejemplo 1.4.1. Calculemos la primera representación fundamental R de laR-álgebra dada en el Ejemplo 1.3.4, evaluada en los elementos de la baseestándar,
(1, 0)(1, 0) = (1, 0) = 1(1, 0) + 0(0, 1), c111 = 1, c112 = 0,
(1, 0)(0, 1) = (0, 1) = 0(1, 0) + 1(0, 1), c121 = 0, c122 = 1,
(0, 1)(1, 0) = (0, 1) = 0(1, 0) + 1(0, 1), c211 = 0, c212 = 1,
(0, 1)(0, 1) = (0, 0) = 0(1, 0) + 0(0, 1), c221 = 0, c222 = 0,
son las matrices
R(1, 0) =
(1 00 1
), R(0, 1) =
(0 01 0
).
Así obtenemos la representación R : A → M(2,R) de R en las matrices deM(2,R) con entradas reales, definida por
R(x, y) =
(x 0y x
).
Por lo tanto, el conjunto de matrices(x 0y x
): x, y ∈ R
es una R-álgebra con respecto al producto usual de matrices, que es isomorfaa la R-álgebra dada en el Ejemplo 1.3.4.

1.4. Primera representación fundamental 17
Ejemplo 1.4.2. La imagen de la base estándar bajo la primera repre-sentación fundamental del álgebra A dada en el Ejemplo 1.3.5, son lasmatices
R(1, 0) =
3
2
1
2
−1
2
1
2
, R(0, 1) =
1
2−1
2
1
2
3
2
.
Lo que nposostros nos interesa es ver como cambia la primera repre-sentación fundamental del álgebra cuando cambiamos de base, en el siguienteresultado mostramos como cambia la primera representación fundamental.
Proposición 1.4.3. Sea A una álgebra, que es el espacio Kn con un pro-ducto, y Rβ, Rγ las primeras representaciones fundamentales de A con re-specto a las bases β, γ, respectivamente. Denotemos por Si = Rβ(βi) yRi = Rγ(γi) para i = 1, ..., n, y S = (sij) la matriz cambio de base. Bajoestas condiciones tenemos que
Sj = S−1n∑i=1
sijRiS
para j = 1, ..., n.
Prueba Tenemos queβiβj =
∑p
Dijpβp, (1.1)
ya que βi =∑
j sjiγj , tenemos del lado izquierdo de (1.1)
βiβj = (∑
l sliγl) (∑
m smjγm) =∑
l
∑m slismj
∑k Clmkγk
=∑
k
∑l
∑m slismjClmkγk
, (1.2)
ahora del lado derecho de la ecuación (1.1) tenemos∑p
Dijpβp =∑k
∑p
skpDijpγk, (1.3)
de las tres ecuacionse tenemos que∑l
∑m
slismjClmk =∑p
skpDijp, (1.4)

18 Módulos y álgebras
entoces tenemos que
SSj =n∑i=1
sijRiS
lo cual demuestra el teorema.
Ejemplo 1.4.4. Sea A la R-álgebra del Ejemplo 1.3.1, sea γ = e1, e2 labase esándar de R2, y β = β1, β2 base de R2, donde β1 = e1+e2 y β2 = e1.Tenemos que
β1β1 =2β1 − β2β1β2 =β1
β2β2 =β2,
así que la primera representació fundamental con respecto a la base β
R(β1) =
(2 1−1 0
), R(β2) =
(1 00 1
).
En el Ejemplo 1.4.1 calculamos R(e1) y R(e2). Vemos que se cumple laproposición 1.4.3
R(β1) = S−1R(e1)S + S−1R(e2)SR(β2) = S−1R(e1)S + 0 ∗ S−1R(e2)S
donde
S =
(1 11 0
), S−1 =
(0 11 −1
).
1.5 Álgebras normales
Las álgebras normales son importantes debido a que están relacionadas conlas formas canónicas de Jordan, y las formas canónicas de Jordan son degran importancia para la algebrización.
Teorema 1.5.1. Para cada matriz A ∈ Mn(R) existe una matriz J ∈M(n,R) llamada forma canónica de Jordan de A y una matriz invertibleB ∈M(n,R), tal que A = B−1JB.
Para cada matriz J una forma canónica de Jordan, le asociaremos unaR-álgebra J de dimensión n, donde está es una subálgebra de Mn(R).

1.5. Álgebras normales 19
Cada forma de canónica de Jordan J ∈Mn(R) es una matriz del tipoB1 0 · · · 00 B2 0...
. . .0 0 · · · Bl
,
en donde los Bi ∈ Mki(R) para i = 1, 2, · · · , l son bloques de Jordan dealguno de los siguientes:I)Bi = (λ), llamado bloque de real simple,
II)Bi =
(α −ββ α
), llamado bloque complejo simple,
III)Bi =
µ 0 0 · · · 01 µ 0 · · · 00 1 µ · · · 0...
. . .0 0 0 · · · µ
, llamado bloque de Jordan real, y
IV)Bi =
C 0 0 · · · 0 0I2 C 0 · · · 0 00 I2 C · · · 0 0...
. . .0 0 0 · · · I2 C
, C =
(η −νν η
), I2 =
(1 00 1
),
llamado bloque de Jordan complejo. Por lo tanto se tiene que n = k1 + k2 +· · ·+ kl,
Sean σi : Mki(R)→Mn(R) las secciones que sustituyen en la matriz ceroMn(R), a la matriz A ∈ Mki(R) en la posición del bloque Bi de la matrizJ ; para i = 1, 2, · · · , l, es decir
σi(A) =
0k1. . .
0ki−1
A0ki+1
. . .0kl
,

20 Módulos y álgebras
donde 0i es la matriz de ceros de dimensión i.Por ejemplo, sea
J =
2 0 00 1 −20 2 1
,
dondeB1 = (2), es un bloque real simple y
B2 =
(1 −22 1
), es un bloque complejo simple,
entonces σ2 : M2(R)→M3(R). Por lo tanto
σ2
((3 −54 1
))=
0 0 00 3 −50 4 1
.
Sea Ii,Mi, Ni ∈Mki(R), donde
Ii =
1 · · · 0...
. . ....
0 · · · 1
, es la matriz identidad,
Mi =
0 −1 · · · 0 01 0 · · · 0 0...
.... . .
......
0 0 · · · 0 −10 0 · · · 1 0
, cumple M2i = −Ii, y
Ni =
0 0 · · · 0 01 0 · · · 0 0...
.... . .
......
0 0 · · · 0 00 0 · · · 1 0
, es la matriz nilpotente.
Definamos al conjunto de matrices β = Bi,j : 1 ≤ i ≤ l, 1 ≤ j ≤ kide la siguiente manera:
i) Bi,1 := σi(1) si Bi es bloque real simple.
ii) Bi,1 := σi(Ii), Bi,2 := σi(Mi), si Bi es un bloque complejo simple.
iii) Bi,1 := σi(Ii) y Bi,j := σi(Nj−1i ) para j = 2, · · · , ki si Bi es el bloque
de Jordan real.

1.5. Álgebras normales 21
iv) Bi,1 := σi(Ii), Bi,2 := σi(Mi), Bi,2j+1 := σi(N2ji ) yBi,2j+2 := Bi,2σi(N
2ji )
para j = 1, · · · , ki2− 1 si Bi es bloque de Jordan complejo.
El espacio lineal generado por β es una R-álgebra de matrices J, tal queβ es una base del espacio lineal y J contiene a la matriz J .
Veamos que es una R-álgebra de matrices J. Podemos ver que Bi,kBj,l =0 para toda i 6= j.
Ahora veamos que σi es un homomorfismo de álgebras. Sea A,B ∈Mki(R), entonces
σi(AB) =
0 · · · 0. . .
... AB...
. . .0 · · · 0
=
0 · · · 0. . .
... A...
. . .0 · · · 0
0 · · · 0. . .
... B...
. . .0 · · · 0
= σi(A)σi(B).
De está propiedad podemos ver que si el bloque Bi es un bloque real simple,un bloque complejo simple o un bloque de Jordan real, las Bi,j , 1 ≤ j ≤ ki,conmutan. Si Bi es un bloque de Jordan complejo, faltaría ver que Bi,2conmuta con Bi,2j+1. Para esto solamente falta ver que N2
i conmuta con Ji,
N2i Ji =
0 0 0 · · · 0 0I 0 0 · · · 0 00 I 0 · · · 0 0...
......
. . ....
...0 0 0 · · · 0 00 0 0 · · · I 0
J 0 0 · · · 0 00 J 0 · · · 0 00 0 J · · · 0 0...
......
. . ....
...0 0 0 · · · J 00 0 0 · · · 0 J
=
0 0 0 · · · 0 0J 0 0 · · · 0 00 J 0 · · · 0 0...
......
. . ....
...0 0 0 · · · 0 00 0 0 · · · J 0
=
0 0 0 · · · 0 0I 0 0 · · · 0 00 I 0 · · · 0 0...
......
. . ....
...0 0 0 · · · 0 00 0 0 · · · I 0
J 0 0 · · · 0 00 J 0 · · · 0 00 0 J · · · 0 0...
......
. . ....
...0 0 0 · · · J 00 0 0 · · · 0 J
= JiN
2i ,
donde I, J , I ∈M2(R).Por lo tanto tenemos que los elementos de β conmutan.

22 Módulos y álgebras
Definición 1.5.2. Llamamos álgebra normal de matrices al álgebra Jgenerado por Bi,j : 1 ≤ i ≤ l, 1 ≤ j ≤ ki.
Ejemplo 1.5.3. Sea
A =
3 −4 00 −1 −20 4 3
,
tenemos que su polinomio característico es P (λ) = (3 − λ)(λ2 − 2λ17), en-tonces la forma canónica de Jordan asociada a la matriz A tenemos quees
J =
3 0 00 1 −40 4 1
,
y la matriz cambio de base es
B =
1 0 10 1 00 1 1
,
la base β de la R-álgebra de matrices J asociada a la matriz J es:
B1,1 =
1 0 00 0 00 0 0
, B2,1 =
0 0 00 1 00 0 1
, B2,2 =
0 0 00 0 −10 1 0
,
es decir que
J =
x 0 0
0 y −z0 z y
: x, y, z ∈ R
Ejemplo 1.5.4. Sea
A =
2 1 1 1 0 1 0 03 7/2 1 5/2 −2 1 3/2 −1−2 −1/2 2 −1/2 2 1 −3/2 1−5 −4 −4 −3 0 −2 −4 −42 5/2 −2 7/2 1 −3 3/2 −45 3 3 4 0 3 4 47 17/2 8 19/2 −2 0 17/2 4−2 −3/2 −1 −5/2 2 −1 −3/2 3
1.5. Álgebras normales 23
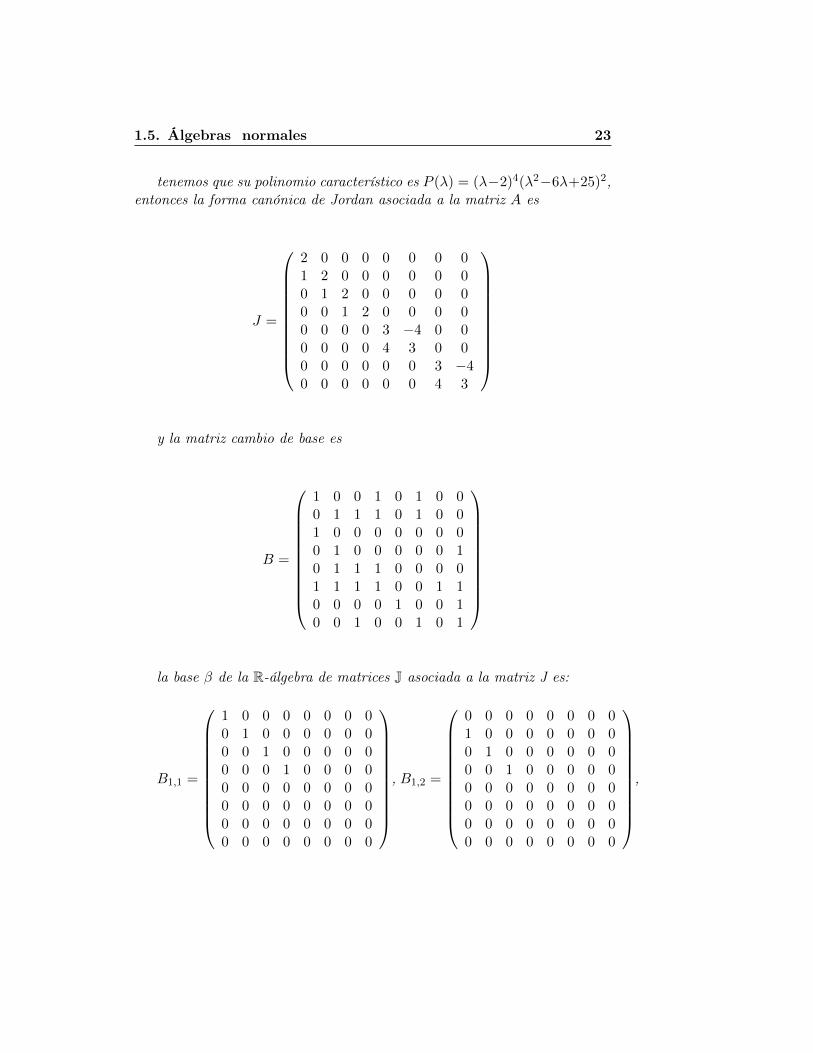
tenemos que su polinomio característico es P (λ) = (λ−2)4(λ2−6λ+25)2,entonces la forma canónica de Jordan asociada a la matriz A es
J =
2 0 0 0 0 0 0 01 2 0 0 0 0 0 00 1 2 0 0 0 0 00 0 1 2 0 0 0 00 0 0 0 3 −4 0 00 0 0 0 4 3 0 00 0 0 0 0 0 3 −40 0 0 0 0 0 4 3
y la matriz cambio de base es
B =
1 0 0 1 0 1 0 00 1 1 1 0 1 0 01 0 0 0 0 0 0 00 1 0 0 0 0 0 10 1 1 1 0 0 0 01 1 1 1 0 0 1 10 0 0 0 1 0 0 10 0 1 0 0 1 0 1
la base β de la R-álgebra de matrices J asociada a la matriz J es:
B1,1 =
1 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
, B1,2 =
0 0 0 0 0 0 0 01 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 1 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
,

24 Módulos y álgebras
B1,3 =
0 0 0 0 0 0 0 00 0 0 0 0 0 0 01 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
, B1,4 =
0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 01 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
B2,1 =
0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 1 00 0 0 0 0 0 0 1
, B2,2 =
0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 −1 0 00 0 0 0 1 0 0 00 0 0 0 0 0 0 −10 0 0 0 0 0 1 0
,
B2,3 =
0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 0
, B2,4 =
0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 −1 0 00 0 0 0 1 0 0 0
es decir que
J =
x1 0 0 0 0 0 0 0x2 x1 0 0 0 0 0 0x3 x2 x1 0 0 0 0 0x4 x3 x2 x1 0 0 0 00 0 0 0 x5 −x6 0 00 0 0 0 x6 x5 0 00 0 0 0 x7 −x8 x5 −x60 0 0 0 x8 x7 x6 x5
: x1, x2, x3, x4, x5, x6, x7, x8 ∈ R

1.6. K-álgebras de Banach 25
Definición 1.5.5. Diremos que dos K-álgebras de matrices A y B en Mn(K)son semejantes si existe una matriz invertible P ∈ Mn(K), tal que A =P−1BP.
Definición 1.5.6. Una R-álgebra A se llama álgebra normal si A es elespacio lineal Rn y la imagen de su primer representación fundamental aso-ciada a la base estándar es un álgebra normal de matrices.
El siguiente ejemplo es una álgebra normada.
Ejemplo 1.5.7. La R-álgebra R2 del Ejemplo 1.3.1, es una álgebra nor-mal, ya que su primera representación fundamental asociada a la base es-tándar, las calculamos en el Ejemplo 1.4.1, son:
R(1, 0) =
(1 00 1
), R(0, 1) =
(0 01 0
).
1.6 K-álgebras de Banach
Primeramente recordemos que un espacio normado sobre un campoK es un espacio lineal E sobre K con una norma, la cual es una función|| · || : E→ R, tal que:
i) ||x|| ≥ 0 para toda x ∈ E, y ||x|| = 0 si y sólo si x = 0.
ii) ||αx|| = |α|||x|| para toda x ∈ E y α ∈ K.
iii) ||x+ y|| ≤ ||x||+ ||y|| para toda x, y ∈ E.
También recordemos que un espacio de Banach sobre un campo Kes un espacio normado en el cual toda sucesión de Cauchy converge.
Definición 1.6.1. Una K-álgebra normada o álgebra normada sobreK es un espacio normado A sobre K, elcual tiene estructura de K-álgebra,y que además la norma || · || satisface ||xy|| ≤ ||x||||y|| para toda x, y ∈ A y||e|| = 1, donde e ∈ A es la unidad.
Ejemplo 1.6.2. Sea J una álgebra de matrices, donde los elementos de éstaálgebra son de la siguiente forma(
x 0y x
),

26 Módulos y álgebras
definimos la norma, | · | : J→ R como:
|(x 0y x
)| =
√2x2 + y2
2,
Se puede ver facilmente que |e| = 1. Ahora veamos que si
A =
(x 0y x
)y B =
(z 0w z
),
entonces |AB| ≤ |A||B|, tenemos que
2x2z2 + y2w2 + (xw − yz)2 ≥ 0
2x2z2 + y2w2 + x2w2 − 2xwyz + y2z2 ≥ 0
4x2z2 + y2w2 + 2x2w2 + 2yz2 ≥ 2x2z2 + y2z2 + x2w2 + 2xwyz
(2x2 + y2)(2z2 + w2) ≥ 2x2z2 + y2z2 + x2w2 + 2xwyz
|A||B| ≥ |AB|.
Definición 1.6.3. Una K- álgebra de Banach o álgebra de Banach Asobre K, es una A-álgebra normada cuyo espacio normado es un espacio deBanach sobre K.
Ejemplo 1.6.4. Sea C una R-álgebra normada con la norma euclidiana esun álgebra de Banach.
Ejemplo 1.6.5. Definimos el conjunto C([0, 1],C) como el conjunto de fun-ciones continuas y acotadas de [0, 1] a C es un espacio de Banach, con lanorma del supremo, f ∈ C([0, 1],C),
|f | = maxx∈[0,1]||f(x)||.

Chapter 2
Diferenciabilidad
En este capítulo trataremos temas de diferenciabilidad de Fréchet en espaciosde Banach y de diferenciabilidad de funciones entre módulos de Banach.También definiremos la derivada newtoniana y la derivada de Lorch, veremosla relación entre estás definiciones.
2.1 Diferencial de Fréchet
Primeramente recordaremos la definición de diferenciación y veremos algunosresultados como la regla de la cadena.
Definición 2.1.1. Diremos que una función f : U ⊂ E1 → E2, definidaen un subconjunto abierto Ude un espacio de Banach E1 con valores en unespacio de Banach E2, es diferenciable en el sentido de Fréchet en un puntox0 ∈ U si existe un operador lineal acotado L : E1 → E2, tal que se cumpleel siguiente límite
limh→0,h∈E1
||f(x0 + h)− f(x0)− L(h)||E2
||h||E1
= 0.
Cuando esto se verifique, denotaremos por Df(x0) al operador L y lollamaremos diferencial de f en x0. Diremos que f es diferenciable en U si fes Fréchet diferenciable para todo punto de U.
Cuando E1 = Rm y E2 = Rn, se sabe que si f es Fréchet diferenciable enun punto x0, entonces las primeras derivadas parciales de los componentesexisten y el diferencial Df(x0) está dado, con respecto a la base estándar deRm y Rn, por la matriz jacobianade f en x0:
27

28 Diferenciabilidad
Df(x0) =
∂f1∂x1
∂f1∂x2
· · · ∂f1∂xn
∂f2∂x1
∂f2∂x2
· · · ∂f2∂xn
......
. . ....
∂fm∂x1
∂fm∂x2
· · · ∂fm∂xn
|x0
,
en donde |x0 significa que todas las derivadas parciales se evaluán en x0.Esto también se obtiene cuando E1 = Cm y E2 = Cn.
Recordemos los siguientes resultados que se obtienen en la diferenciabili-dad. Sean f, g : U ⊂ E1 → E2, funciones definidas en un subconjunto abiertode un espacio de Banach E1 sobre K y con qué espacio de Banach E2 sobreK. Entonces
• La suma f + g de funciones Fréchet diferenciables es Fréchet diferen-ciable y su diferencia en un punto x0 ∈ U, que es un operador K-linealde E1 a E2, está dado por
D(f + g)(x0) = Df(x0) +Dg(x0).
• El producto de una función Fréchet diferenciable por una constante esFréchet diferencianble y su diferencial en un punto x0 ∈ U, que es unoperador K-lineal de E1 a E2, está dado por
D(cf)(x0) = cDf(x0).
Los siguiente resultado son clásicos cuando se estudia la diferenciabilidadde funciones en espacios de Banach.
Teorema 2.1.2. (Regla de la cadena). Sean f : U ⊂ E1 → E2 y g : W ⊂E2 → E3 funciones, donde U y W son conjuntos abiertos con f(U) ⊂ W, yE1,E2 y E3 son espacio de Banach sobre K. Si f es Fréchet diferenciable enx0 y g es Fréchet diferenciable en f(x0), entonces gf es Fréchet diferenciableen x0 se cumple la regla de la cadena
D(g f)(x0) = [D(g(f(x0)))]D(f(x0)).
Esto es,[D(g f)(x0)](v) = [D(g(f(x0)))]([D(f(x0))](v)),
para todo v ∈ E1.

2.1. Diferencial de Fréchet 29
Prueba .- Veamos que
limh→0,h∈E1
||g(f(x0 + h))− g(f(x0))−Dg(f(x0))[Df(x0)(x− x0)||E2
||h||E1
= 0.
Para esto estimaremos el numerador:
||(g f)(x)− (g f)(x0)−Dg(f(x0))(Df(x0)(x− x0))||=||(g f)(x)− (g f)(x0)−Dg(f(x0))[f(x)− f(x0)]
+Dg(f(x0))[f(x)− f(x0)−Df(x0)(x− x0)]||≤||(g f)(x)− (g f)(x0)−Dg(f(x0))[f(x)− f(x0)]||
+ ||Dg(f(x0))[f(x)− f(x0)−Df(x0)(x− x0)]||
Como f es diferenciable, existen δ0 y M > 0 tales que ||f(x)− f(x0)|| ≤M ||x − x0|| siempre que ||x − x0|| < δ0. Dado ε > 0, por la definición dediferenciabilidad de g, existe δ1 tal que ||y − f(x0)|| < δ1 implica
||g(y)− g(f(x0))−Dg(f(x0))[y − f(x0)]|| <( ε
2M
)||y − f(x0)||.
Así, ||x− x0|| < δ2 = minδ0, δ1 implica
||g(f(x))− g(f(x0))−Dg(f(x0))[f(x)− f(x0)]||||x− x0||
<ε
2.
Como Dg(f(x0)) es una transformación lineal, sabemos que existe Nconstante tal que ||Dg(f(x0))(y)|| ≤ N ||y|| para todo y ∈ E2. Ahora bien,por la definición de diferenciabilidad, existe δ3 > 0 tal que ||x − x0|| < δ3implica
||f(x)− f(x0)−Df(x0)(x− x0)||||x− x0||
<ε
2N.
Entonces ||x− x0|| < δ3 implica
||Dg(f(x0))[f(x)− f(x0)−Df(x0)(x− x0)]||||x− x0||
<ε
2.
Sea δ = minδ2, δ3. Así, ||x− x0|| < δ implica
||(g f)(x)− (g f)(x0)−Dg(f(x0))(Df(x0)(x− x0))||||x− x0||
< ε,
lo que demuestra la fórmula.

30 Diferenciabilidad
Teorema 2.1.3. (Teorema de la función inversa). Sean E1,E2 espacios deBanach sobre K ambos de dimensión finita n y U ⊂ E1 abierto. Supong-amos que f : U ⊂ E1 → E2 es continuamente diferenciable en x0 ∈ U ydet(Df(x0)) 6= 0. Entonces existe un conjunto abierto V ⊂ U ⊂ E1, quecontiene a x0 y un conjunto abierto W ⊂ E2, que contiene a f(x0), tal quef : V →W tiene una inversa continua f−1 : W → V, la cual es diferenciablepara toda y ∈W y satisface:
D(f−1)(y) = [Df(f−1(y))]−1.
Prueba .- Como det(Df(x0)) 6= 0, entonces Df(x0) es invertible, luegoexiste Df(x0)
−1 y ||Df(x0)|| 6= 0. Como f es diferenciable en x0, existeδ > 0 tal que si x ∈ E1 y ||x− x0|| < δ, entonces
||f(x)− f(x0)−Df(x0)(x− x0)|| ≤||x− x0||
2||Df(x0)−1||,
y por lo tanto
||f(x)− f(x0)|| = ||f(x)− f(x0)−Df(x0)(x− x0) +Df(x0)(x− x0)||≥ ||Df(x0)(x− x0)|| − ||f(x)− f(x0)−Df(x0)(x− x0)||
≥ ||Df(x0)(x− x0)|| −||x− x0||
2||Df(x0)−1||
≥ ||x− x0||2||Df(x0)−1||
,
ya que
||x−x0|| = ||(Df(x0))−1(Df(x0))(x−x0)|| ≤ ||(Df(x0))
−1||||Df(x0)(x−x0)||.
Para probar que f−1 es diferenciable en y = f(x0) yDf−1(y) = Df(x0)−1,
sea yn una sucesión de puntos en E2, distintos de y, convergente a y. En-tonces xn = f−1(yn) es una sucesión de puntos de E1, distintos de x0,convergente a x0 ya que f−1 es continua en y. Podemos suponer sin pérdidade generalidad que ||x− x0|| < δ para todo n ya que xn −→ x0. Entonces

2.1. Diferencial de Fréchet 31
||f−1(yn)− f−1(y)−Df(x0)−1(yn − y)||
||yn − y||=||xn − x0 −Df(x0)
−1(f(xn)− f(x0))||||yn − y||
=||xn − x0 −Df(x0)
−1(f(xn)− f(x0)−Df(x0)(xn − xn) +Df(x0)(xn − x0))||||yn − y||
=||xn − x0 −Df(x0)
−1(f(xn)− f(x0)−Df(x0)(xn − x0))− (xn − x0)||||yn − y||
=||Df(x0)
−1(f(xn)− f(x0)−Df(x0)(xn − x0))||||yn − y||
≤ ||Df(x0)−1|| ||f(xn)− f(x0)−Df(x0)(xn − x0)||
||xn − x0||||xn − x0||||yn − y||
≤ 2||Df(x0)−1||2 ||f(xn)− f(x0)−Df(x0)(xn − x0)||
||xn − x0||.
Como f es diferenciable en x0, tenemos
||f(xn)− f(x0)−Df(x0)(xn − x0)||||xn − x0||
→ 0
y por lo tanto
||f−1(yn)− f(y)−Df(x0)−1(yn − y)||
||yn − y||→ 0.
Esto prueba que f−1 es diferenciable en y = f(x0) y Df−1(y) = Df(x0)−1.
Lo que nosotros queremos hacer es definir la diferenciabilidad en K-álgebras de Banach, la diferenciabilidad en el sentido de Fréchet nos dauna idea de lo que queremos que cumpla la diferenciabilidad en álgebras deBanach. Ahora veamos los siguientes resultados, donde las funciones van deun espacio de Banach a una K-álgebra.
Definición 2.1.4. Sean E un espacio de Banach sobre K y A una K-álgebra,sean f y g funciones tal que f, g : U ⊂ E→ A.
Ahora definimos la función producto fg de manera natural, fg : U ⊂E→ A, tal que
(fg)(x) = f(x)g(x),

32 Diferenciabilidad
donde f(x)g(x) denota el producto en el álgebra de f(x) por g(x).
Supongamos que la imagen de g está contenido en G(A), definimos lafunción conciente (f/g), fg : U ⊂ E→ A, como:
(f/g)(x) = f(x)/g(x)
donde f(x)/g(x) denota el cociente en el álgebra de f(x) entre g(x).
En las siguientes proposiciones, veremos como es la regla del productoy la regla del cociente en funciones que van de un espacio de Banach a unálgebra.
Proposición 2.1.5. (Regla del producto en álgebras). Sean E un espacio deBanach sobre el campo K y A una K-álgebra de Banach. Supongamos quef, g : U ⊂ E→ A son funciones Fréchet diferenciables definidas en el abiertoU, entonces el producto fg es Fréchet diferenciable y su diferencial está dadapor:
D(fg)(x0) = g(x0)Df(x0) + f(x0)Dg(x0),
esto es[D(fg)(x0)]v = g(x0)(Df(x0)v) + f(x0)(Dg(x0)v),
para todo v ∈ E, en donde g(x0)(Df(x0)v) significa el producto en A deg(x0) por [Df(x0)]v.
Ejemplo 2.1.6. Sea A el espacio euclidiano R2 con el producto de la R-álgebra de los números complejos. Conideremos a las funciones f y g definidaspor
f(x, y) = (x+ xy, x2 + y2 + xy), g(x, y) = (cos(xy), ex+y).
Observemos que f, g son Fréchet diferenciable y no son diferenciables en elsentido complejo, pues sus matrices jacobianas están dadas por(
1 + y x2x+ y 2y + x
),
(−ysenx −xsenyex+y ex+y
),
respectivamente, por lo que no están contenidas en la primera representaciónfundamental de C.El producto complejo de f y g es el siguiente:
f(x, y)g(x, y) = ((x+ xy)cos(xy)− (x2 + y2 + xy)ex+y,
(x+ xy)ex+y + (x2 + y2 + xy)cos(xy))
=x(1 + y)(cos(xy), ex+y) + (x2 + y2 + xy)(−ex+y, cox(xy)),

2.1. Diferencial de Fréchet 33
cuyo diferencial de Fréchet, por la regla del producto en A, está dado por
[D(fg)(x0)](a, b) = g(x0)(Df(x0)(a, b)) + f(x0)(Dg(x0)(a, b)).
calculamos los siguientes productos(1 + y x
2x+ y 2y + x
)(ab
) (−ysenx −xsenyex+y ex+y
)(ab
),
Podemos evaluar los diferenciales [Df(x0, y0)] y [Dg(x0, y0)] en (a, b) :
[Df(x0, y0)](a, b) = (a(1 + y0) + bx0, a(2x0 + y0) + b(2y0 + x0)),
[Dg(x0, y0)](a, b) = (−ay0senx0 − bx0seny0, ex0+y0(a+ b)).
Al multiplicar estas dos últimas expresiones por g(x0, y0) y f(x0, y0), re-spectivamente, obtenemos
g(x0, y0)([Df(x0, y0)](a, b)) = (cos(x0y0), ex0+y0)(a(1 + y0) + bx0,
a(2x0 + y0) + b(2y0 + x0))= (cos(x0y0)(a(1 + y0) + bx0)− ex0+y0(a(2x0 + y0)
+b(2y0 + x0)), ex0+y0(a(1 + y0) + bx0)
+cos(x0y0)(a(2x0 + y0) + b(2y0 + x0)))= cos(x0y0)(a(1 + y0) + bx0, a(2x0 + y0) + b(2y0 + x0))
+ex0+y0(−a(2x0 + y0)− b(2y0 + x0), a(1 + y0) + bx0),(2.1)
y
f(x0, y0)[Dg(x0, y0)](a, b) = (x0 + x0y0, x20 + y20 + x0y0)(−ay0senx0 − bx0seny0,
ex0+y0(a+ b))= ((x0 + x0y0)(−ay0senx0 − bx0seny0)− (x20 + y20 + x0y0)
ex0+y0(a+ b), (x0 + x0y0)ex0+y0(a+ b)
+(x20 + y20 + x0y0)(−ay0senx0 − bx0seny0))= (x0 + x0y0)(−ay0senx0 − bx0seny0, ex0+y0(a+ b))
+(x20 + y20 + x0y0)(−ex0+y0(a+ b),−ay0senx0 − bx0seny0).(2.2)
Por lo tanto, sumando las dos expresiones (2.1) y (2.2) obtenemos eldiferencial del producto de fg en el punto (x0, y0) evaluado en (a, b).
Proposición 2.1.7. (Regla del cociente en álgebras). Sean E un espaciode Banach sobre un campo K y A una K-álgebra de Banach. Supongamosque f, g : U ⊂ E → A son funciones de Fréchet diferenciable definidas en el

34 Diferenciabilidad
abiertoU, y Im(g) ⊂ G(A), entonces el cociente f/g es Fréchet diferenciable,y su diferencial está dado por:
D(f/g)(x0) =g(x0)Df(x0)− f(x0)Dg(x0)
g(x0)2,
esto es,
[D(f/g)(x0)]v =g(x0)([Df(x0)]v)− f(x0)([Dg(x0)]v)
g(x0)2,
para todo v ∈ E, en donde g(x0)([Df(x0)]v) significa el producto en A deg(x0) por ([Df(x0)]v).
Ejemplo 2.1.8. Sean A, f, g dadas en el Ejemplo 2.1.1. Entonces para calcu-lar el cociente complejo de f y g primero calculamos la invera multiplicativacompleja de g(x, y), que esta dada por
(g(x, y))−1 =
(cos(xy)
cos2(xy) + e2(x+y),
−ex+y
cos2(xy) + e2(x+y)
).
Por lo tanto, el cociente se calcula de la siguiente manera:
f(x, y)/g(x, y) =
((x+ xy)cos(xy) + (x2 + y2 + xy)ex+y
cos2(xy) + e2(x+y)
)e1(
−(x+ xy)ex+y + (x2 + y2 + xy)cos(xy)
cos2(xy) + e2(x+y)
)e2.
Para encontrar el diferencial del cociente f/g en el punto (x0, y0) aplicado a(a, b), el cual por la regla del cociente para el diferencial de Fréchet está dadopor
[D(f/g)(x0, y0)](a, b) =g(x0, y0)([Df(x0, y0)](a, b))− f(x0, y0)([Dg(x0, y0)](a, b))
g(x0, y0)2,
(2.3)primero, usando las igualdades de (2.1) y (2.2) del Ejemplo 2.1.1,calcu-
lamos el numerador del miembro del lado derecho de la igualdad anterior:
g(x0)([Df(x0)](a, b))− f(x0)([Dg(x0)](a, b))
=cos(x0y0)(a(1 + y0) + bx0, a(2x0 + y0) + b(2y0 + x0))
+ ex0+y0(−a(2x0 + y0)− b(2y0 + x0), a(1 + y0) + bx0)
− (x0 + x0y0)(−ay0senx0 − bx0seny0, ex0+y0(a+ b))
− (x20 + y20 + x0y0)(−ex0+y0(a+ b),−ay0senx0 − bx0seny0),
2.2. Diferenciabilidad en álgebras de Banach 35
multiplicando a ésta, con el producto complejo por
(g(x0, y0))−2 =
(cos2(x0y0)− e2(x0+y0)
(cos2(x0y0) + e2(x0+y0))2,−2ex0+y0cos(x0y0)
(cos2(x0y0) + e2(x0+y0))2
).
tendremos evaluada la expresión del lado derecho de (2.3).
2.2 Diferenciabilidad en álgebras de Banach
En esta sección daremos la definición de derivada de tipo newtoniano enálgebras y la definición de derivada de Lorch. Además veremos unos resulta-dos importantes que usaremos para saber cuando un sistema de ecuacionesdiferenciales es algebrizable, que veremos en el siguiente capítulo.
2.2.1 Derivada newtoniana
En la sección anterior estudiamos la diferenciabilidad en el sentido de Fréchet,donde las funciones van de un espacio de Banach a un espacio de Banach o aun álgebra. En esta sección lo que haremos es ver la diferenciabilidad de fun-ciones donde el dominio y el contradominio es un álgebra de Banach, a estadiferenciabilidad le llamaremos diferenciabilidad newtoniana. La diferencia-bilidad que nosotros buscamos es una diferenciabilidad que nos asegure entérminos de la ecuaciones de Cauchy-Riemann generalizadas que una funciónes diferenciable. La diferenciabilidad newtoniana nos acerca a esta diferen-ciabilidad que queremos.
Definición 2.2.1. Sea A una álgebra de Banach y U ⊂ A un subconjuntoabierto. Decimos que una función f : U ⊂ A → A es N-diferenciable enun punto x0 ∈ U si existe un elemento a ∈ A, tal que el siguiente lmite existey se da la igualdad
limh→0,h∈G(A)
f(x0 + h)− f(x0)
h= a.
Denotamos por f ′N (x0) al elemento a y lo llamamos N-derivada de f emx0. Si f es N-diferenciable en todos los puntos de U, diremos que f es difer-enciable sobre U.
Después de ver la definición de diferenciabilidad newtoniana, queremossaber si cumple la regla de la cadena. Antes de ver el resultado de la regla

36 Diferenciabilidad
de la cadena, veamos el siguiente resultado que nos sirve para demostrar laregla de la cadena.
Lema 2.2.2. Si f ′N (x0) es regular, entonces existe un δ > 0 tal que para todox en la vecindad de radio δ de x0 y x−x0 es regular se tiene que f(x)−f(x0)es regular.
Prueba .- El conjunto de los elementos invertibles en un álgebra de Banaches abierto, si f ′N (x0) es regular, entonces existe un r > 0 tal que la vecindadde radio r de f ′N (x0) está totalmente contenida en el conjunto de elementosregulares. Por definición de derivada tenemos que existe un δ > 0 tal que six en U , subconjunto abierto del álgebra, y ||x− x0|| < δ, entonces∥∥∥∥f(x)− f(x0)
x− x0− f ′N (x0)
∥∥∥∥ < r.
Por lo tanto, f(x)−f(x0)x−x0 es regular para todo x ∈ U con ||x − x0|| < δ yx− x0 es regular, tenemos que
f(x)− f(x0) =f(x)− f(x0)
x− x0(x− x0)
es regular.
El siguiente teorema nos dice cuando se cumple la regla de la cadena enla diferenciabilidad newtoniana. Antes definimos el conjunto C(x0, δ), talque x ∈ C(x0, δ) si x− x0 es regular y ||x− x0|| < δ.
Teorema 2.2.3. Sea A una álgebra de Banach, U, V ⊂ A conjuntos abiertosy f : U → A, g : V → A funciones N-diferenciables en x0 y f(x0), respecti-vamente, con f(U) ⊂ V y f ′N (x0) elemento regular en A, entonces h := g fcumple la regla de la cadena para la N-derivada, es decir, h es N-diferenciabley su N-derivada está dada por
h′N (x0) = g
′N (y0)f
′N (x0),
en donde y0 = f(x0) y g′N (y0)f′N (x0) representa el producto en A de g′N (y0)
y f ′N (x0).

2.2. Diferenciabilidad en álgebras de Banach 37
Prueba .- Usamos la notación y0 = f(x0). Por el Lema 2.2.2 podemostomar δ1 > 0 tal que si x ∈ U y x ∈ C(x0, δ1), entonces f(x) − f(x0) esregular.Sea ε > 0. Dado que f es derivable en x0 podemos tomar δ2 > 0 tal que six ∈ C(x0, δ2) ∩ U , entonces∣∣∣∣f(x)− f(x0)
x− x0− f ′N (x0)
∣∣∣∣ < min
ε/3
|g′N (y0)|+ ε/3, ε/3
.
De la derivabilidad de g en y0 podemos elegir δ3 tal que si y ∈ C(y0, δ3)∩V ,entonces ∣∣∣∣g(x)− g(x0)
x− x0− g′N (y0)
∣∣∣∣ < min
ε/3
|f ′N (y0)|+ ε/3, ε/3
.
Como f es derivableen x0, podemos tomar δ4 de tal manera que si x ∈C(x0, δ4) ∩ U , entonces
f(x) ∈ C(y0, δ3).
Tomando δ = minδ1, δ2, δ4 tenemos que si x ∈ C(x0, δ), entonces f(x) ∈C(y0, δ3), tenemos que∣∣∣∣g(f(x))− g(f(x0))
x− x0− g′N (f(x0))f
′N (x0)
∣∣∣∣=
∣∣∣∣g(f(x))− g(f(x0))
f(x)− f(x0)
f(x)− f(x0)
x− x0− g′N (f(x0))f
′N (x0)
∣∣∣∣≤∣∣∣∣g(f(x))− g(f(x0))
f(x)− f(x0)
(f(x)− f(x0)
x− x0− f ′N (x0)
)∣∣∣∣+
∣∣∣∣f ′N (x0)
(g(f(x))− g(f(x0))
f(x)− f(x0)− g′N (f(x0))
)∣∣∣∣≤∣∣∣∣g(f(x))− g(f(x0))
f(x)− f(x0)
(ε/3
|g′N (f(x0))|+ ε/3
)∣∣∣∣+ |f ′N (x0)|(
ε/3
|f ′N (x0)|+ ε/3
)≤(|g′N (f(x0))|+
ε/3
|f ′N (x0)|+ ε/3
)ε/3
|g′N (f(x0))|+ ε/3+ ε/3
≤(|g′N (f(x0))|+ 1
) ε/3
|g′N (f(x0))|+ ε/3+ ε/3 < ε/3 + ε/3 + ε/3 = ε
Por lo tanto, (g f)′N (x0) = g′N (f(x0))f
′N (x0).
Los siguientes ejemplos muestran cuando se cumple la regla de la cadena.

38 Diferenciabilidad
Ejemplo 2.2.4. Sea B una álgebra de Banach, f : B → B la funcióndada por x → 2x y g : B → B la función definida por x → x2. Entoncesf′N = 2e es regular, donde ee es la unidad del álgebra, y g
′N (x) = 2x.
Por la regla de la cadena tenemos que si h := g f, entonces h′N (x0) =g′N (y0)f
′N (x0) = 2(2x)2e = 8x, ya que son válidas las reglas usuales de
diferenciación. Derivando directamente tenemos que la derivada de h(x) =(2x)2 = 4x2 está dado por h′N = 8x. Por lo tanto, la regla de la cadena severifica.
Ejemplo 2.2.5. Sea B una álgebra de Banach y a ∈ B un elemento regular.Entonces la función h : B → B definida por h(x) = eax es N-derivabley es la composición h = g f de las funciones f : B → B, definida porx→ ax, y g : B→ B, dada por x→ ex. Como se verifican las reglas usualesde diferenciación, tenemos que h′N (x) = aeax, g
′N (f(x)) = ef(x) = eax, y
f′N (x) = a, de donde se obtiene
h′N (x) = g
′N (f(x))f
′N (x).
Por lo tanto, se cumple la regla de la cadena.
El siguiente ejemplo es interesante, ya que no cumple con la regla de lacadena, pero la composición sigue siendo diferenciable.
Ejemplo 2.2.6. Sea B un álgebra de Banach con unidad e y sea a ∈ B unelemento singular, definimos las funciones f, g : B→ B tal que f(x) = ax yg está dada por
g(x) =
x, si x es regular.2x, si x es singular.
Ahora definimos la función h := g f, tenemos que h(x) = 2ax.
Así, derivando directamente h en 0, tenemos que h′N (0) = 2a. La derivadade f en 0 es f ′N (0) = a y la derivada de g en f(0) está dada por
g′N (f(0)) = g
′N (0) = lim
h→0, h∈G(B)
g(h)− g(0)
h= lim
h→0h∈G(B)
h− 0
h= e.
Es decir,h′N (0) = 2a 6= a = g
′N (f(0))f
′N (0),
por lo que la regla de la cadena no se cumple.

2.2. Diferenciabilidad en álgebras de Banach 39
2.2.2 Derivada de Lorch
La diferenciabilidad de Lorch nos cumple con lo que queremos y tambiéncumple con algunas propiedades de la diferenciabilidad de funciones de unavariable.
Definición 2.2.7. Sea A una álgebra de Banach y U ⊂ A un subconjuntoabierto. Decimos que una función f : U ⊂ A → A es A-diferenciable odiferenciable en el sentido de Lorch en un punto x0 ∈ U si f es difer-enciable en el sentido de Fréchet en x0 y existe un elemento a ∈ A, tal queDf(x0)v = av para todo v ∈ A, en donde av denota al producto de a por ven A, denotamos por f ′(x0) = a al elemento a.
Por lo tanto, la A-diferenciable de f en un punto x0 equivale a la exis-tencia de un elemento a ∈ A, tal que se cumple el siguiente límite:
limh→0, h∈G(A)
||f(x0 + h)− f(x0)− ah||A||h||A
= 0,
en donde ah denota al producto en A de a con h.
Veamos un ejemplo de la diferenciabilidad de Lorch. Sea A = (R2, ·)álgebra de Banach, donde el producto es el complejo, definido en el Ejemplo1.3.6, y la norma es la euclidiana definida como
||(x, y)|| = x2 + y2,
sea f : A→ A definida por f(x) = x2. Veamos que f ′(x) = 2x,
limh→0,h∈G(A)
||(x+ h)2 − x2 − 2xh||||h||
= limh→0,h∈G(A)
||((x1, x2) + (h1, h2))2 − (x1, x2)
2 − 2(x1, x2)(h1, h2)||||(h1, h2)||
= limh→0,h∈G(A)
||((x1, x2) + (h1, h2))2 − (x1, x2)
2 − 2(x1, x2)(h1, h2)||||(h1, h2)||
= limh→0,h∈G(A)
||(h21 − h22, 2h1h2)||||(h1, h2)||
= limh→0,h∈G(A)
||(h1, h2)2)||||(h1, h2)||
= 0.

40 Diferenciabilidad
Recordemos queDf(x0) es la matriz jacobiana si el álgebra A es el espaciovectorial Rn o Cn con un producto de álgebra. También recordemos que laprimera representación fundamental de un álgebra A asociada a la base β esel isomorfismo de álgebras, Rβ : A → Mm(K), cuando la base es la esándardenotaremos al isomorfismo por R. El siguiente resultado es importante parasaber si una función es A-diferenciable.
Proposición 2.2.8. Supongamos que A es el espacio Rn con un productode álgebra y que f : U ⊂ Rn → Rn es A-diferenciable en un punto x0 ∈ U,en donde U es abierto. Entonces
Df(x0) = R(f′(x0)),
esto es, si f ′(x0) = (a1, a2, ..., an), entonces
Df(x0) = a1R1 + a2R2 + ...+ anRn.
Prueba .- Supongamos que f ′(x0) = (a1, a2, ..., an). De la definición deA-diferenciable tenemos que
Df(x0)(x) = ax,
en donde x = (x1, x2, ..., xn), a = (a1, a2, ..., an) y el primer miembro dellado derecho de la expresión anterior representa al producto en A.Para evaluar Df(x0) en x, calculamos el producto
∂f1∂x1
∂f1∂x2
. . . ∂f1∂xn
∂f2∂x1
∂f2∂x2
. . . ∂f2∂xn
......
. . ....
∂fn∂x1
∂fn∂x2
. . . ∂fn∂xn
x1x2...xn
=
∑n
j=1∂f1∂xj|x0xj∑n
j=1∂f2∂xj|x0xj
...∑nj=1
∂fn∂xj|x0xj
.
Ahora calculamosmos el producto de a por x
ax = (a1e1 + a2e2 + ...+ anen)(x1e1 + x2e2 + ...+ xnen)
=∑n
i=1
∑nj=1
∑nl=1 alxjcljiei =
∑ni=1
(∑nj=1 (
∑nl=1 alclij)xj
)ei.
(2.4)De la igualdad Df(x0)x = ax, tenemos que
n∑j=1
∂fi∂xj
(x0)xj =
n∑j=1
(n∑l=1
alclji
)xj , (2.5)

2.2. Diferenciabilidad en álgebras de Banach 41
entonces∂fi∂xj
(x0) =
n∑i=1
alclji, (2.6)
que son las entradas de la igualdad matricial Df(x0) = R(a), con lo queterminamos la demostración.
Como consecuencia de la Proposición 2.2.8 tenemos que si una funciónf : U ⊂ Rn → Rn es A-diferenciable en x, entonces Df(x) ∈ R(A) ypor definición f es Fréchet diferenciable en x. En la siguiente proposicióntenemos que la recíproca necesita la hipótesis adicional de diferencialbilidadde Fréchet para asegurar la A-diferenciabilidad.
Proposición 2.2.9. Sean f : U ⊂ Rn → Rn una función Fréchet diferencia-ble en un punto x0 y Df(x0) ∈ Rβ(A), esto es, Df(x0) = a1R1 + ...+anRn,en donde A es el espacio Rn con un producto de álgebra, β = f1, f2, ..., fnes una base de A, Rβ es la primera representación fundamental de A asoci-ada a β,Ri = Rβ(fi) para i = 1, 2, ...n, y a = (a1, a2, ..., an). Entonces f esA-diferenciable en x0 y su A-derivada está dada por
f′(x0) = a.
Prueba .- De la igualdad matricial que
Df(x0) = a1R1 + a2R2 + ...+ anRn,
tenemos que las entradas satisfacen las n2 igualdades (2.6). Procediendo demanera inversa en la prueba de la Proposición 2.2.8, tenemos que se cumplenlas igualdades (2.4) y (2.5), de donde podemos obtener que
Df(x0) = ax.
Por lo tanto, f es A-diferenciable y sus A-derivada satisface la igualdadf′(x0) = a.
Teorema 2.2.10. Sea A una álgebra de Banach cuyo conjunto de elementosregulares G(A) es denso en A. Si f : U ⊂ A → A es N-diferenciable sobreun conjunto abierto U, entonces f es A-diferenciable sobre U y las derivadascoinciden, esto es, f ′(x) = f
′N (x) para toda x ∈ U.

42 Diferenciabilidad
2.3 Relación entre la diferenciabilidad de Fréchet yla diferenciabilidad de Lorch
Esta sección hablaremos de la relación entre la diferenciabilidad de Fréchety la diferenciabilidad de Lorch. Tambi”en veremos otro forma de demostrarel resultado de como cambia la primera representación fundamental de unálgebra A cuando cambiamos de base.
2.3.1 Cambio de base
Sea f : U ⊂ Kn → Kn una función definida en un abierto U . Si β =β1, ..., βn es una base de Kn, denotamospor (∂fj/∂βi)(x0) a las derivadasparciales
∂fj∂βi
(x0) = limh→0, h∈K
f(x0 + hβi)− f(x0)
h
con respecto a la dirección βi de las componentes fj de la función f =f1β1 + ...+ fnβn. Usaremos la notación Jβf(x0) para la matriz jacobiana def con respecto a la base β en el punto x0, esto es,
Jβf(x0) =
∂f1∂β1
∂f1∂β2
. . . ∂f1∂βn
......
. . ....
∂fn∂β1
∂fn∂β2
. . . ∂fn∂βn
|x0 .Observemos que si β es la base estándar de Kn, entones ∂fj/∂ei =
∂fj/∂xi, en donde x = (x1, ..., xn) denota a las coordenadas de Kn.
Observemos que si β = β1, ..., βn está dada por βi =∑n
j=1 sjiγj parai = 1, ..., n, sij ∈ K, entonces las coordenadas y = (y1, ..., yn) asociadas aβ se relacionan con las coordenadas x = (x1, ..., xn) asociadas a la baseγ = γ1, ..., γn, de la siguiente manera:
n∑i=1
yiβi =
n∑i=1
yi
n∑j=1
sjiγj =
n∑j=1
(n∑i=1
sjiyi
)γj =
n∑j=1
xjγj ,
es decir, tenemos que xi =∑n
j=1 sjiyj para j = 1, ..., n, o de maneraequivalente x = LS(y), donde S es la matriz S = (sij) y LS denota a latransforación lineal asociada a la matriz S.
Denotemos por g a la función f expresada en el sistema de coordenadasy, entonces g = L−1S f LS . La relación entre Dβf (que es Jg en las

2.3. Relación entre la diferenciabilidad de Fréchet y ladiferenciabilidad de Lorch 43
coordenadas y) y Dγf está dadapor la igualdad siguiente:
Dβf = S−1DγfS. (2.7)
Si γ es la base estándar de Kn, entonces
Dβf = S−1DfS, (2.8)
Df denota a la matriz jacobiana de f en la base estándar.
Proposición 2.3.1. Sea A una álgebra, que es el espacio Kn con un pro-ducto, y Rβ, Rγ las primeras representaciones fundamentales de A con re-specto a las bases β, γ, respectivamente. Denotemos por Si = Rβ(βi) yRi = Rγ(γi) para i = 1, ..., n. Bajo estas condiciones tenemos que
Sj = S−1n∑i=1
sijRiS
para j = 1, ..., n.
Prueba .- Para mostrar esto, tenemos que si
Dβf(y0) =n∑i=1
biSi, Dγf(x0) =n∑i=1
aiRi,
donde x0 = LS(y0) y a = LS(b)(ai =∑n
j=1 sijbj). Entonces
S−1DγS = S−1n∑i=1
aiRiS = S−1n∑i=1
n∑j=1
sijbjRiS =n∑j=1
bjS−1
n∑i=1
sijRiS.
Luego, de la igualdad (2.7) tenemos que S−1DγfS =∑n
i=1 biSi, entoncesSj = S−1
∑ni=1 sijRiS para j = 1, 2, ..., n.
Ejemplo 2.3.2. Sea A la R-álgebra C y β = β1, β2 la base de A dada porβ1 = e2, β2 = e1 + e2, entoncess la matriz S está dada por
S =
(0 11 1
).
La tabla del producto de A con respecto a β es la siguiente:
· β1 β2β1 β1 − β2 2β1 − β2β2 2β1 − β2 2β1
de donde podemos obtener que las imágenes de β1 y β2 están respectiva-mente dadas por

44 Diferenciabilidad
Rβ(β1) =
(1 2−1 −1
), Rβ(β2) =
(2 2−1 0
).
Observemos que
S−1(R(e2))S =
(−1 11 0
)(0 −11 0
)(0 11 1
)=
(1 10 −1
)(0 11 1
)=
(1 2−1 −1
)= Rβ(β1),
S−1(R(e1) +R(e2))S =
(−1 11 0
)((1 00 1
)+
(0 −11 0
))(0 11 1
)=
(−1 11 0
)(1 −11 1
)(0 11 1
)=
(0 21 −1
)(0 11 1
)= Rβ(β2).
La función f(ξ) = ξ2 con respecto a la base estándar de R2, se escribecomo f(x, y) = (x2 − y2, 2xy), y con respecto a la base β tenemos que
f(u, v) =(uβ1 + vβ2)2 = u2β21 + 2uvβ1β2 + v2β22
=u2(β1 − β2) + 2uv(2β1 − β2) + v2(2β1)
= (u2 + 4uv + 2v2,−u2 − 2uv),
de donde obtenemos que Jβf(u, v) está dada por la matriz
Jβf =
(2u+ 4v 4u+ 4v−2u− 2v −2u
),
(uv
)=
(−1 1
1 0
)(xy
).
La relación entre las matrices jacobianas asociadas a β y a la base están-dar de R2 está dada en la igualdad
S−1Jf(x, y)S =
(−1 1
1 0
)(2x −2y2y 2x
)(0 11 1
)=
(2x+ 2y 4y−2y 2x− 2y
).
Los siguientes resultados relaciona la deiferenciabilidad de Fréchet con ladiferenciabilidad de Lorch. Esto es de gran ayuda, ya que en varios casoses difícil calcular la diferenciabilidad de Fréchet, y entonces nos podemosayudar calculando la diferenciabilidad de Lorch.

2.3. Relación entre la diferenciabilidad de Fréchet y ladiferenciabilidad de Lorch 45
Teorema 2.3.3. (Regla de la cadena para diferenciabilidad de Fréchet yLorch.) Si E es un espacio de Banach sobre K,A es un álgebra de Banachsobre K, f : U ⊂ E→ A es una función Fréchet diferenciable en un punto x0en el abierto U y g : V ⊂ A → A es una función definida sobre un abiertoV que contiene a f(U), esto es f(U) ⊂ V, que es A-diferenciable en f(x0).Entonces por la regla de la cadena para la derivada de Fréchet, la funciónh = g f es Fréchet diferenciable en x0 y su diferencial está dado por
Dh(x0) = Dg(f(x0))Df(x0).
que es el operador lineal de E a A definido por
Dh(x0)v = Dg(f(x0))(Df(x0)v),
en donde Dg(f(x0))(Df(x0)v) denota al producto en A de Dg(f(x0)) yDf(x0)v.
Ejemplo 2.3.4. Sean f y g las funciones definidas por f(x, y, z) = (x +
z, y + z) y g(x, y) = e(x,y)C en donde e.A denota a la función exponencial
compleja de R2 a R2. Entonces la función h = g f es Fréchet diferenciabley su diferencial está dado por
Dh(x0, y0, z0) = g′(f(x0, y0, z0))Df(x0, y0, z0),
en donde
Df(x0, y0, z0) =
(1 0 10 1 1
)y
g′(f(x0, y0, z0)) = e
f(x0,y0,z0)C = ex+z(cos(y + z), sen(y + z)).
Por lo tanto,
[Dh(x0, y0, z0)](a, b, c) = ex0+z0(cos(y0 + z0), sen(y0 + z0))(a+ c, b+ c),
en donde la multiplicación de elementos de R2, que aparece en el lado derechode la expresión anterior, denota al producto complejo. Entonces
[Dh(x0, y0, z0)](a, b, c) =ex0+z0((a+ c)cos(y0 + z0)− (b+ c)sen(y0 + z0),
(a+ b)sen(y0 + z0) + (b+ c)cos(y0 + z0)).
Teorema 2.3.5. (Regla de la cadena para diferenciabilidad con respecto ados álgebras.) Si E es un espacio de Banach en el cual se tiene definidas dos

46 Diferenciabilidad
estructuras de álgebras de Banach A y B, f : U ⊂ E→ E es una función A-diferenciable en x0 en el abierto U y g : V ⊂ E→ E es una función definidaen un abierto V, donde f(U) ⊂ V, que es B-difereciable em f(x0), entoncespor la regla de la cadena para la diferencial de Fréchet, tenemos que
D(g f) = Dg(f(x0))Df(x0).
esto esD(g f)(x0)v = g
′B(f(x0))(f
′A(x0)v)
para todo v ∈ E, en donde f ′A representa a la A-derivada,g′B(f(x0)) la B-derivada, f ′Av al producto entre los elementos f ′A y v de A, y g′B(f(x0))(f
′Av)
al producto en B de g′B(f(x0)) y f ′Av.
Ejemplo 2.3.6. Sean A el álgebra definida por el espacio R2 con el producto
(x, y)(u, v) = (xu+ yv, xv + yu),
y f(x) = x2 con respecto al producto de A y g(y) = eyC relativo a la R-álgebraC. Entonces
[D(g f)(x0, y0)](a, b) =e(x0,y0)2
C ·C (2(x0, y0) ·A (a, b))
=2ex20−y20 (cos(2x0y0), sen(2x0y0)) ·C (ax0 + by0, bx0 + ay0)
=2ex20−y20 ((ax0 + by0)cos(2x0y0)− (bx0 + ay0)sen(2x0y0))e1
+2ex20−y20 ((bx0 + ay0)cos(2x0y0) + (ax0 + by0)sen(2x0y0))e2.
2.4 Ecuaciones de Cauchy-Riemann en álgebras
En esta sección hablaremos de las ecuaciones de Cauchy-Riemann en álge-bras, y daremos un resultado importante para la algebrización de sistema deecuaciones diferenciales que veremos en el cap”itulo tres. Las ecuaciones deCauchy-Riemann juegan un papel importante para saber si una función esA-diferenciable.
Sea A un álgebra asociativa conmutativo y f una función f : U ⊂ A→ A,tenemos el siguiente conjunto de ecuaciones diiferenciales
n∑i,j=1
dkij∂fi∂xj
= 0, (k = 1, 2, · · · , (n2 − n)), (2.9)
que son las ecuaciones de Cauchy-Riemann generalizadas.

2.4. Ecuaciones de Cauchy-Riemann en álgebras 47
Lema 2.4.1. Para j, k, s ∈ 1, 2, ..., n se tiene que las primeras derivadasparciales de las componentes de una función A-diferenciable f : U ⊂ A→ Asatisface las igualdades
n∑i=1
ciks∂fi∂xj
=n∑i=1
cijs∂fi∂xk
. (2.10)
Prueba .- En la primera y última de las igualdades siguientes se usanlas ecuaciones (2.6), en la segunda y cuarta se usan propiedades usuales desumas y productos, en la tercera se usa la asociatividad del álgebra y en laquinta, la conmutatividad del álgebra:
n∑i=1
ciks∂fi∂xj
=∑i=1
ciks
n∑l=1
alclji =
n∑l=1
al
n∑i=1
ciksclji =
n∑l=1
al
n∑i=1
cjiscckli
=
n∑i=1
cjis
n∑l=1
alckli =
n∑i=1
cijs
n∑i=1
alclki =
n∑i=1
cijs∂fi∂xk
,
de esta manera el lema queda demostrado para j, k, s ∈ 1, 2, ..., n.
En esta sección damos unos ejemplos en los cuales calculamos las ecua-ciones de Cauchy-Riemann. Si Rn tiene definido un producto de álgebra A,tal que los elementos de la base estándar e1, ..., en son regulares en A y sif : Ω ⊂ A→ A es A-diferenciable, podemos calcular la A-derivada de f ′(x)en las direcciones de la base estándar mediante el límite newtoniano
limt→0
f(x+ tek)− f(x)
tek, limt→0
f(x+ tel)− f(x)
tel
de donde obtenemos las igualdades
∂f
ei∂xi=
∂f
ej∂xj, ej
∂f
∂xi= ei
∂f
∂xj,
n∑k=1
∂fk∂xi
ekej =n∑l=1
∂fl∂xi
elei.
Así, se obtienen un conjunto de n2−n igualdades entre las derivadas par-ciales de las componentes de f; Mediante un procedimiento análogo al hechopara obtener las igualdades (2.6), podemos mostrar que estas ecuaciones sonlas de Cauchy-Riemann generalizadas.
Si no todos los elementos de la base estándar de Rn son regulares enel álgebra, podemos usar las igualdades (2.9) para calcular las ecuaciones

48 Diferenciabilidad
de Cauchy-Riemann. Se puede elegir una base de elementos regulares paraun álgebra, pero recordemos que al cambiar la base de ésta álgebra, loscoeficientes de estructura en la nueva base son diferentes, por lo que lasecuaciones de Cauchy-Riemann obtenidas serían diferentes.
Ejemplo 2.4.2. (Ecuaciones de Cauchy-Riemann en los complejos)Consideremos a la R-álgebra de los complejos, cuyo producto en la base es-tándar de R2 está dado en el Ejemplo 1.3.6. Si f : U ⊂ R2 → R2 esC-diferenciable, entonces
∂f1∂x
e1e2 +∂f2∂x
e2e2 =∂f1∂x
e1e1 +∂f2∂x
e2e1.
Usando el producto complejo, podemos llegar a la siguiente igualdad:
∂f1∂x
e2 +∂f2∂x− (e1) =
∂f1∂x
e1 +∂f2∂x
e2,
de donde obtenemos las ecuaciones de Cauchy-Riemann para los complejos∂f1∂x = ∂f2
∂y ,∂f2∂x = −∂f1
∂y .
Ahora lo que veremos es como determinan un álgebra asociativa conmu-tativa A para el conjunto de ecuaciones diferenciales (2.9) tal que son lasecuaciones diferenciales de Cauchy-Riemann generalizadas.
Teorema 2.4.3. Supongamos el sistema de ecuaciones dierenciales (2.9)tiene la propiedad que para algún entero fijo p implica(
∂yr∂xs
)=
(n∑t
atsr∂yt∂xp
).
Supongamos, además, que las matrices Ai = (aisr), i = 1, 2, · · · , n, sonconmutativa y ∑n
i=1 dkii = 0, (k = 1, 2, · · · , (n2 − n)).
Entonces existe un único álgebra A conmutativa asociativa sobre R, que(2.9) es un conjunto de ecuaciones diferenciales de Cauchy-Riemann gener-alizadas.
Corolario 2.4.4. Una condición necesaria y suficiente para que las ecua-ciones lineales independientes
2∑i,j=1
dkij∂yi∂xj
= 0 (k = 1, 2) (2.11)

2.4. Ecuaciones de Cauchy-Riemann en álgebras 49
determina un álgebra A tal que (2.11) es el conjunto de las ecuaciones deCauchy-Riemann generalizadas es tal que
dk11 + dk22 = 0 (k = 1, 2).

50 Diferenciabilidad

Chapter 3
Algebrización de sistema de ecuacionesdiferenciales autónomo
En este capítulo Definiremos lo que es algebrizar. También aaremos algunosresultados para algebrización de sistema de ecuaciones diferenciales autóno-mas planares y en el espacio, también de sistema de ecuaciones diferencialesno autónomas planares.
3.1 Algebrización de campos vectoriales planares
Supongamos que tenemos una funciones f1, f2 : R2 → R2 tal que
f1(x1, x2) =x21 − x22f2(x1, x2) =2x1 − 2x2,
ahora supongamos que R2 es un R-álgebra con el producto complejo y defin-imos F : R2 → R2, como F (x1, x2) = (f1(x1, x2), f2(x1, x2)), entonces pode-mos escribir a F de la siguiente forma
F (X) = X2,
donde X = (x1, x2). Ahora daremos la definición formal de algebrización.
Definición 3.1.1. Sea A el espacio R2 con un producto de R-álgebra. Dec-imos que un campo vectorial F : Ω ⊂ R2 → R2 es A-algebrizable en Ω siF es A-diferenciable en Ω.
Definición 3.1.2. Sea A el espacio R2 con un producto de R-álgebra. Dire-mos que el sistema diferencial
dx1dt
= f1(x1, x2),
dx2dt
= f2(x1, x2)
51

52 Algebrización de sistema de ecuaciones diferenciales autónomo
es A-algebrizable si F = (f1, f2) es A-algebrizable.
Proposición 3.1.3. Sea F : Ω ⊂ R2 → R2 Fréchet-diferenciable en Ω. Entonces, F es algebrizable si y sólo si existe una pareja de matricesB1, B2 ∈M(2,R) linealmente independiente tal que:
〈Bi, DF (x1, x2)〉 = 0, T r(Bi) = 0, i = 1, 2.
Prueba .- La demostración es directa del Corolario 2.4.4. Ahora lo que queremos saber es como son esas matrices y cuál es la
álgebra correspondiente. En los siguientes resultaremos damos formas de lasmatrices y cual es el álgebra.
Proposición 3.1.4. Sea F : Ω ⊂ R2 → R2 Fréchet-diferenciable sobre unconjunto abierto Ω . La función F es algebrizable si y sólo si para cada unade los tres tipos
I) B1 =
(1 0a −1
), B2 =
(0 1b 0
)
II) B1 =
(1 a0 −1
), B2 =
(0 01 0
)
III) B1 =
(0 10 0
), B2 =
(0 01 0
)donde a y b son constantes reales, tales que
〈Bi, DF (x1, x2)〉 = 0, i = 1, 2.
Prueba.- El conjuntoM de las matrices B ∈M2(R) que satisfacen
〈B,DF (x1, x2)〉 = 0 y Tr(B) = 0
define un espacio linear L, ya que si A,B ∈M y λ, µ ∈ R tenemos que
Tr(λA+ µB) = λTr(A) + µTr(B) = 0,
y
〈λA+ µB,DF (x1, x2)〉 = λ〈A,DF (x1, x2)〉+ µ〈B,DF (x1, x2)〉 = 0.
Así, una combinación de elementos de L pertenece a L. Suponga que Fes Algebriable, entonces por la Proposición 3.1.1, existe un par de matrices

3.1. Algebrización de campos vectoriales planares 53
B1, B2 ∈ L, donde B1 y B2 tienes la siguiente forma
B1 =
(h lc −h
), B2 =
(d ef −d
)que son linealmente independientes. Por lo tanto, la dimensión dim(L) ≥
2. Estas matrices B1, B2 pueden considerarse como dos vectores v1, v2 ∈R4 que son linealmente independientes, donde v1 = (h, l, c,−h) y v2 =(d, e, f,−d). Consideremos escribir estos vectores como una matriz de 2× 4.Entonces, realizando un número finito de operaciones elementales de fila enla matriz
W =
(h l c −hd e f −d
),
tenemos los siguientes casos:
• Caso I: h 6= 0 and d 6= 0. Supongamos que e 6= 0, realizamos operacioneselementares obtenemos: (
1 0 a −10 1 b 0
),
B1 =
(1 0a −1
),B2 =
(0 1b 0
)son las matrices del Tipo I.
Otro subcaso es: e = 0 entonces f 6= 0, realizamos operaciones ele-mentales obtenemos (
1 a 0 −10 0 1 −0
),
obtenemos B1 y B2 del Tipo II.
• Caso II: h 6= 0 y d = 0. Supongamos que e 6= 0 y realizamos operacioneselementales (
1 0 a −10 1 b 0
),
donde obtenemos las matrices de el Tipo I. Supongaos que e = 0entonces f 6= 0, realizamos operaciones obtenemos(
1 a 0 −10 0 1 0
),
donde obtenemos las matrices de el Tipo II.

54 Algebrización de sistema de ecuaciones diferenciales autónomo
• Caso III: h = 0 y d 6= 0. Supongaos que l 6= 0 y realizamos operaciones elemen-tales (
0 1 b 01 0 a −1
),
donde obtenemos las matrices de Tipo I. El otro subcaso es l = 0entonces c 6= 0 (
0 0 1 01 a 0 −1
),
donde obtenemos las matrices de el Tipo II.
• Caso IV: h = 0 y d = 0. Supongamos que l 6= 0, realizamos operaciones elemen-tales obtenemos
(0 1 0 00 0 1 0
),
donde obtenemos las matrices de el Tipo III. Si l = 0 entonces c 6= 0 ye 6= 0, realizamos operaciones obtenemos(
0 0 1 00 1 0 0
),
donde obtenemos las matrices de el Tipo III.
Por lo tanto, empezamos formando una pareja de matrices B1, B2 obten-emos una pareja de matrices B1,B2 de uno y sólo uno de los Tipos I, II oIII que satisface 〈Bi, DF (x1, x2)〉 = 0, y Tr(Bi) = 0, para i = 1, 2 y paratodo (x1, x2) ∈ Ω, entonces estas matrices son linealmentes independientesy satisface Tr(Bi) = 0, para i = 1, 2. Por la Proposición 3.1.1, terminamosla demostración.
En la sección 2.3 vimos que A = (R2, ·) es un álgebra, donde · denotaalguno de los siguientes productos:
I)· e1 e2e1 e1 e2e2 e2 −be1 + ae2
II)· e1 e2e1 −ae1 e1e2 e1 e2

3.1. Algebrización de campos vectoriales planares 55
III)· e1 e2e1 e1 0e2 0 e2
En el siguiente teorema vemos cuando una función F es algebrizable conrespecto a cada producto.
Teorema 3.1.5. Sea A = (R2, ·) donde · denota alguno de los tres produc-tos definidos anteriormente. Sea F : Ω ⊂ R2 → R2 una función Fréchet-diferenciable en el conjunto abierto Ω. Entonces F es algebrizable si y sólosi F es A-diferenciable.
Prueba.- Calculando el producto interior de la pareja de matrices del tipoI de la Proposición 3.1.4 con DF (x1, x2) tenemos las siguientes ecuaciones
∂f1∂x1
+ a∂f2∂x1− ∂f2∂x2
= 0
∂f1∂x2
+ b∂f2∂x1
= 0
entonces∂f2∂x2
=∂f1∂x1
+ a∂f2∂x1
∂f1∂x2
= −b ∂f2∂x1
obtenemos que DF (x1, x2) satisface la igualdad ∂f1∂x1
∂f1∂x2
∂f2∂x1
∂f2∂x2
=
(1 00 1
)∂f1∂x1
+
(0 −b1 a
)∂f2∂x1
.
Por la Proposición 2.2.9 tenemos que el espacio R2 es un álgebra A cuyaprimera representación funtamental asociada a la base canónica de R2 esdefinido por:
R(e1) =
(1 00 1
), R(e2) =
(0 −b1 a
).
El producto dado en la tabla I del Ejemplo 1.3.7 corresponde a esta álge-bra. Por otra parte, F es A-diferenciable, procediendo de manera inversaobtenemos que F es algebrizable. Así, la demostración está hecha cuando la

56 Algebrización de sistema de ecuaciones diferenciales autónomo
álgebra A está dotado con el producto tipo I.
Calculando el producto interior de la pareja de matrices del tipo II de laProposición 3.1.4 con DF (x1, x2) tenemos las siguientes ecuaciones
∂f1∂x1
+ a∂f1∂x2− ∂f2∂x2
= 0,∂f2∂x1
= 0
entonces
∂f1∂x1
= −a∂f1∂x2
+∂f2∂x2
,∂f2∂x1
= 0
obtenemos que DF (x1, x2) satisface la igualdad ∂f1∂x1
∂f1∂x2
∂f2∂x1
∂f2∂x2
=
(−a 10 0
)∂f1∂x2
+
(1 00 1
)∂f2∂x2
.
Por la Proposición 2.2.9 tenemos que el espacio R2 es un álgebra A cuyaprimera representación funtamental asociada a la base canónica de R2 esdefinido por:
R(e1) =
(−a 10 0
), R(e2) =
(1 00 1
).
El producto dado en la tabla II del Ejemplo 1.3.7 corresponde a esta ál-gebra. Por otra parte, F es A-diferenciable, procediendo demanera inversaobtenemos que F es algebrizable. Así, la demostración está hecha cuando elálgebra A está dotado con el producto tipo II.
Si tenemos la existencia de una pareja de matrices como en el tercer caso,entonces
∂f1∂x2
= 0,∂f2∂x1
= 0.
Así, f1(x1, x2) no depende de x2 y f2(x1, x2) no depende de x1. En estecaso tenemos que F es A-diferenciable con respecto a el álgebra dado en latabla III. Así, la prueba está hecha cuando el álgebra A está dotado con elproducto tipo III satisface el hipotesis del teorema.
En la demostración del teorema anterior tenemos que

3.1. Algebrización de campos vectoriales planares 57
1. La función F es algebrizable con respecto al producto tipo I si
∂f1∂x1
+ a∂f2∂x1− ∂f2∂x2
= 0
∂f1∂x2
+ b∂f2∂x1
= 0.(3.1)
2. F es algebrizable con respecto al producto tipo II si
∂f1∂x1
+ a∂f1∂x2− ∂f2∂x2
= 0,
∂f2∂x1
= 0.(3.2)
3. F es algebrizable con respecto al producto tipo III si
∂f1∂x2
= 0,∂f2∂x1
= 0.(3.3)
Corolario 3.1.6. Los sistemas cuadráticos planares que son algebrizabletiene una de las siguientes expresiones;
1. Tipo I
x1 = a0 + (b2 − ab1)x1 − bb1x2 +
(1
2b4 − ab3
)x21 − 2bb3x1x2 −
1
2bb4x
22,
x2 = b0 + b1x1 + b2x2 + b3x21 + b4x1x2 +
(1
2ab4 − bb3
)x22,
donde a, b, a0, b0, ..., b4 son constantes reales.
2. Tipo II
x1 =a0 + a1x1 + a2x2 −1
2aa3x
21 + a3x1x2 + a4x
22,
x2 =b0 + (a1 + aa2)x2 +
(1
2a3 + aa4
)x22,
donde a, b, a0, a1, a2, a3, a4 son constantes reales.

58 Algebrización de sistema de ecuaciones diferenciales autónomo
3. Tipo III
x1 = a0 + a1x1 + a3x21,
x2 = b0 + b2x2 + b5x22,
donde a0, a1, a3, b0, b2, b3 son constantes reales.
Prueba .- Asociamos el sistema de ecuaciones diferenciales Tipo I al campovectorial F : R2 → R2 definido por
F (x1, x2) = (a0 + (b2 − ab1)x1 − bb1x2 +
(1
2b4 − ab3
)x21 − 2bb3x1x2 −
1
2bb4x
22,
b0 + b1x1 + b2x2 + b3x21 + b4x1x2 +
(1
2ab4 − bb3
)x22)
y cuya matriz jacobiana es
DF (x1, x2) =
(b2 − ab1 + (b4 − 2ab3)x1 − 2bb3x2 −bb1 − 2bb3x1 − bb4x2
b1 + 2b3x1 + b4x2 b2 + b4x1 + (ab4 − 2bb3)x2
).
Las matrices
B1 =
(1 0a −1
), B2 =
(0 1b 0
)son ortogonales a la matriz jacobianaDF (x1, x2).Así, F es A-algebrizable
con respecto a el álgebra A que es R2 con el producto tipo I, donde e = e1 esla unidad de A. La ecuación diferencial de una sola variable sobre la álgebracorrespondiente está dada por
dξ
dτ= (a0e1 + b0e2) + ((b2 − ab1) e1 + b1e2) ξ +
((1
2b4 − ab3
)e1 + b3e2
)ξ2,
donde ξ = x1e1 + x2e2.
Ahora asociamos al sistema de ecuaciones diferenciales Tipo II el campovectorial F : R2 → R2 definido por
F (x1, x2) = (a0 + a1x1 + a2x2 −1
2aa3x
21 + a3x1x2 + a4x
22,
b0 + (a1 + aa2)x2 +
(1
2a3 + aa4
)x22)

3.1. Algebrización de campos vectoriales planares 59
y cuya matriz jacobiana es
DF (x1, x2) =
(a1 − aa3x1 + a3x2 a2 + a3x1 + 2a4x2
0 a1 + aa2 + (a3 + 2aa4)x2
).
Las matrices
B1 =
(1 a0 −1
), B2 =
(0 01 0
)son ortogonales a la matriz jacobianaDF (x1, x2).Así, F es A-algebrizable
con respecto a el álgebra A que es R2 con el producto Tipo II, donde e = e2es la unidad de A. La ecuación diferencial de una sola variable sobre la álge-bra correspondiente está dada por
dξ
dτ= (a0e1 + b0e2) + (a2e1 + (a1 + aa2) e2) ξ +
(a4e1 +
(12a3 + aa4
)e2)ξ2,
donde ξ = x1e1 + x2e2.
Asociamos al sistema de ecuaciones diferenciales Tipo III el campo vec-torial F : R2 → R2 definido por
F (x1, x2) = (a0 + a1x1 + a3x21, b0 + b2x2 + b5x
22)
y cuya matriz jacobiana es
DF (x1, x2) =
(a1 + 2a3x1 0
0 b2 + 2b5x2
).
Las matrices
B1 =
(0 10 0
), B2 =
(0 01 0
)son ortogonales a la matriz jacobianaDF (x1, x2).Así, F es A-algebrizable
con respecto a el álgebra A que es R2 con el producto Tipo III, dondee = e1 + e2 es la unidad de A. La ecuación diferencial de una sola vari-able sobre la álgebra correspondiente está dada por
dξ
dτ= (a0e1 + b0e2) + (a1e1 + b2e2)ξ + (a3e1 + b5e2)ξ
2,
donde ξ = x1e1 + x2e2.

60 Algebrización de sistema de ecuaciones diferenciales autónomo
Ejemplo 3.1.7. El campo vectorial
F (x1, x2) = (3x− y + x2 − y2, x+ 5y + 2xy + 2y2)
tiene matriz jacobiana
DF (x1, x2) =
(3 + 2x −1− 2y1 + 2y 5 + 2x+ 4y
).
Encontramos las matrices
B1 =
(1 02 −1
), B2 =
(0 11 0
),
que cumplen
〈DF (x1, x2), Bi〉 = 0, i = 1, 2.
Por lo tanto F es A-algebrizable con respecto al producto tipo I, donde a = 2y b = −1.
La unidad del álgebra es e1 y tenemos que
F (te1) = F (t, 0) = (3t+ t2, t) = (3, 1)t+ (1, 0)t2,
entoncesF (X) = CX +X2, C = (3, 1),
como función de la variable X = (x, y) de A
Ejemplo 3.1.8. Consideremos el sistema de ecuaciones diferenciales
x1 = x21 − 2x22
x2 = 2x1x2 + 2x22,
que es asociado al campo vectorial F : R2 → R2 definido por
F (x1, x2) = (x21 − 2x22, 2x1x2 + 2x22)
y cuya matriz jacabiona es
DF (x1, x2) =
(2x1 −4x22x2 2x1 + 4x2
).
Las matrices
B1 =
(1 02 −1
), B2 =
(0 12 0
)son ortogonales a la matriz jacobiana DF (x1, x2), es decir

3.1. Algebrización de campos vectoriales planares 61
〈Bi, JF (x1, x2〉 = 0, i = 1, 2,
para todo (x1, x2) ∈ Ω. Así, F es A-algebrizable con respecto al álgebraA que es R2 con el producto tipo I, donde a = 2, b = 2 y e = e1 es launidad de A. La ecuación diferencial de una sola variable sobre el álgebra
correspondiente es dada pordξ
dτ= ξ2.
3.1.1 Factor algebrizante
Vimos resultados para algebrizar algunos sistemas de ecuciones diferenciales:Existen varíos sistemas de ecuaciones diferenciales que no se pueden alge-brizar directamente, pero multiplicando por una función el sistema nuevopuede ser algebrizable, a esta función se le llama factor algebrizante. Acontinuación daremos la definición formal de factor algebrizante.
Definición 3.1.9. Diremos que el sistema
dx1dt
= f1(x1, x2),
dx2dt
= f2(x1, x2)(3.4)
es casi-algebrizable si existe una función escalar Frechét -diferenciable α =α(x1, x2), llamado factor algebrizante, tal que la función F = (αf1, αf2)es algebrizable.
Vimos que en el plano tenemos tres tipos de productos, a continuaciónveremos tres teorema que nos dice las condiciones que debe cumplir la funciónpara poder encontrar el factor algebrizante correspondiente a cada producto.
Teorema 3.1.10. Sea (3.4) el sistema diferencial, con f1 6= 0. Sea h(x1, x2)definida por
h =−f1
∂f1∂x1− f2
∂f1∂x2− (af1 + bf2)
∂f2∂x1
+ f1∂f2∂x2
f21 + af1f2 + bf22,
con f21 + af1f2 + bf22 6= 0. Supongamos que existen constantes a y b tal queh tiene antiderivada H(x1, x2) con respecto a x1 y que satisface
∂H
∂x2=−bf2h−
∂f1∂x2− b ∂f2
∂x1f1
,
entonces α(x1, x2) = eH(x1,x2) es un factor algebrizante para el sistema.
62 Algebrización de sistema de ecuaciones diferenciales autónomo
Prueba .- Tenemos que
∂(αf1)
∂x2=∂(eHf1)
∂x2= f1e
H ∂H
∂x2+∂f1∂x2
eH =
f1eH
−bf2h−∂f1∂x2− b ∂f2
∂x1f1
+∂f1∂x2
eH = eH(−bf2h− b
∂f2∂x2
)=
−b(f2e
Hh+∂f2∂x2
eH)
= −b∂(eHf2)
∂x1= −b∂(αf2)
∂x1,
también tenemos que
∂(αf2)
∂x2=∂(eHf2)
∂x2= f2e
H ∂H
∂x2+∂f2∂x2
eH = eh
f2−bf2h−∂f1∂x2− b ∂f2
∂x1f1
+∂f2∂x2
= eH
bf1f22
∂f1∂x1
+ bf32∂f1∂x2
+ bf22 (af1 + bf2)∂f2∂x1− bf1f22
∂f2∂x2
f1(f21 + af1f2 + bf22 )
−eH
(f21 + af1f2 + bf22 )
(−f2
∂f1∂x2− bf2
∂f2∂x1
+ f1∂f2∂x2
)f1(f21 + af1f2 + bf22 )
= eH
bf1f22
∂f1∂x1
+ (−f21 f2 − af1f22 )∂f1∂x2− bf21 f2
∂f2∂x1
+ (f31 + af21 f2)∂f2∂x2
f1(f21 + af1f2 + bf22 )
= eH
bf22
∂f1∂x1
+ (−f1f2 − af22 )∂f1∂x2− bf1f2
∂f2∂x1
+ (f21 + af1f2)∂f2∂x2
(f21 + af1f2 + bf22 )
= eH
(f1 + af2)
−f1∂f1∂x1− f2
∂f1∂x2− (af1 + bf2)
∂f2∂x1
+ f1∂f2∂x2
f21 + af1f2 + bf22
+eH
(f21 + af1f2 + bf22 )
(∂f1∂x1
+ a∂f2∂x1
)f21 + af1f2 + bf22
= eH(
(f1 + af2)h+∂f1∂x1
+ a∂f2∂x1
)

3.1. Algebrización de campos vectoriales planares 63
= f1eH ∂H
∂x1+∂f1∂x1
eH + a
(f2e
H ∂H
∂x1+∂f2∂x1
eH)
=∂(eHf1)
∂x1+ a
∂(eHf2)
∂x1=∂(αf1)
∂x1+ a
∂(αf2)
∂x1,
por lo que tenemos que F (x1, x2) = ((αf1)(x1, x2), (αf2)(x1, x2)) cumple conlas ecuaciones (3.1), es decir,
∂(αf1)
∂x2= −b∂(αf2)
∂x1,
∂αf2∂x2
=∂αf1∂x1
+ a∂αf2∂x1
,
es decir, (αf1, αf2) es algebrizable con respecto a una álgebra del tipo I dadoen el Teorema 3.1.5.
Teorema 3.1.11. Sea (3.4) el sistema diferencial, con f2 6= 0. Sea h(x1, x2)definida por
h =f1∂f2∂x1− f2
∂f1∂x1
+ af1∂f2∂x2− af2
∂f1∂x2
af1f2 − f22,
con af1f2 − f22 6= 0. Supongamos que existe constante a tal que h tiene an-tiderivada H(x2), no depende de x1, y definimos g1(x2) = eH(x2), entonces
α(x1, x2) =g1(x2)
f2(x1, x2)
es un factor algebrizante para el sistema.
Prueba .- Tenemos que
∂(αf2)
∂x1=
∂(g1f2f2
)
∂x1=∂g1∂x1
= 0,
también tenemos que
∂(αf2)
∂x2−a∂(αf1)
∂x2=
∂(g1f2f2
)
∂x2−a
∂(g1f2f2
)
∂x2=∂g1∂x2−a
(f1∂g1∂x2
+ g1∂f1∂x2
)f2 − g1f1
∂f2∂x2
f22

64 Algebrización de sistema de ecuaciones diferenciales autónomo
= eHh−a
(eHhf1 + eH
∂f1∂x2
)f2 − eHf1
∂f2∂x2
f22= eH
h(f22 − af1f2)− af2∂f1∂x2
+ af1∂f2∂x2
f22
= eH
f1∂f2∂x1− f2
∂f1∂x1
+ af1∂f2∂x2− af2
∂f1∂x2
af1f2 − f22
(f22 − af1f2)− af2 ∂f1∂x2+ af1
∂f2∂x2
f22
= eH
f2∂f1∂x1− f1
∂f2∂x1
f22
=g1f2
∂f1∂x1− g1f1
∂f2∂x1
f22=f1f2
∂g1∂x1
+ g1f2∂f1∂x1− g1f1
∂f2∂x1
f22
=(f1
∂g1∂x1
+ g1∂f1∂x1
)f2 − g1f1∂f2∂x1
f22=
∂(g1f1f2
)
∂x1=∂(αf1)
∂x1,
por lo tanto, tenemos que F (x1, x2) = ((αf1)(x1, x2), (αf2)(x1, x2)) cumplecon las ecuaciones (3.2), es decir,
∂(αf2)
∂x1= 0,
∂(αf2)
∂x2− a∂(αf1)
∂x2=∂(αf1)
∂x1,
es decir, (αf1, αf2) es algebrizable con respecto a una álgebra del tipo IIdado en el Teorema 3.1.5.
Teorema 3.1.12. Sea (3.4) el sistema diferencial. Supongamos que existenβ, f, g funciones tales que
f1(x1, x2) = β(x1, x2)f(x1),

3.1. Algebrización de campos vectoriales planares 65
f2(x1, x2) = β(x1, x2)g(x2)
y β(x1, x2) 6= 0, entonces
α(x1, x2) =1
β(x1, x2).
es un factor algebrizante para el sistema.
Prueba .- Tenemos que F (x1, x2) = ((αf1)(x1, x2), (αf2)(x1, x2)) cumplecon las ecuaciones (3.3), es decir,
∂(αf2)
∂x1=
∂g
∂x1= 0,
y que∂(αf1)
∂x2=
∂f
∂x2= 0,
por lo tanto es algebrizable con respecto a una álgebra del tipo III dado enel Teorema 3.1.5.
Ejemplo 3.1.13. Considere el sistema
x1 =x1x2− 1
x2 =2x1
x1 + x2
tenemos que f1 =x1x2− 1 y f2 =
2x1x1 + x2
. Tomando a=0 y b=1 tenemos que
h(x1, x2) =1
x1 + x2. La antiderivada H(x1, x2) = log|x1 + x2| + log|x2| de
h que satisface las hipotesis del Teorema 3.1.10, entonces
α(x1, x2) = eH(x1,x2) = x2(x1 + x2).
es un factor algebrizante del sistema. Así
α(x1, x2)(f1(x1, x2), f2(x1, x2)) = (x21 − x22, 2x1x2).
Evaluando α(f1, f2) en te, donde e es la identidad, en este caso e = (1, 0),tenemos α(t, 0)(f1(t, 0), f2(t, 0)) = (t2, 0) = t2e. Por lo tanto
α(x1, x2)(f1(x1, x2), f2(x1, x2) = (x1, x2)2.

66 Algebrización de sistema de ecuaciones diferenciales autónomo
3.2 Algebrización de campos vectoriales en el espa-cio
En esta sección veremos algunos resultados para algebrizar sistemas de ecua-ciones diferenciales de tres por tres. Para eso, tenemos que R3 es un álgebraA = (R3, ·) donde · denota alguno de los siguientes tres productos
A)
· e1 e2 e3e1 e1 e2 e3e2 e2 −ae1 − ce2 − ee3 −be1 − de2 − fe3e3 e3 −be1 − de2 − fe3 −he1 − je2 − le3
B)
· e1 e2 e3e1 −ae1 − ce2 − ee3 e1 −be1 − de2 − fe3e2 e1 e2 e3e3 −be1 − de2 − fe3 e3 −he1 − je2 − le3
C)
· e1 e2 e3e1 −ae1 − ce2 − ee3 −be1 − de2 − fe3 e1e2 −be1 − de2 − fe3 −he1 − je2 − le3 e2e3 e1 e2 e3
Teorema 3.2.1. Sea f : Ω ∈ R3 → R3 Fréchet-diferenciable sobre un con-junto abierto Ω. Suponga que existe seis matrices linelmente independientesB1, ...,B6 ∈M3(R) de los siguientes tipos:
B1 =
0 1 0a 0 0b 0 0
,B2 =
−1 0 0c 1 0d 0 0
,B3 =
0 0 0e 0 0f 1 0
,
B4 =
0 0 1g 0 0h 0 0
,B5 =
0 0 0i 0 1j 0 0
,B6 =
−1 0 0k 0 0l 0 1
,
que son ortogonales a la matriz Jacobiana Df(x, y, x), es decir,
〈Bi, Df(x, y, z)〉 = 0, i = 1, 2, 3, 4, 5, 6.
para todo (x, y, z) ∈ Ω. Entonces A = (R3, ·) es un álgebra con el productotipo A, tal que f es A− diferenciable.

3.2. Algebrización de campos vectoriales en el espacio 67
Prueba.- Calculando el producto interior de las seis matrices conDf(x, y, z)tenemos las siguientes ecuaciones
a∂f2∂x
+ b∂f3∂x
+∂f1∂y
= 0, −∂f1∂x
+ c∂f2∂x
+ d∂f3∂x
+∂f2∂y
= 0,
e∂f2∂x
+ f∂f3∂x
+ f∂f3∂y
= 0, g∂f2∂x
+ h∂f3∂x
+∂f1∂z
= 0,
i∂f2∂x
+ j∂f3∂x
+∂f2∂z
= 0, −∂f1∂x
+ k∂f2∂x
+ l∂f3∂x
+∂f3∂z
= 0,
por lo tanto
Df(x, y, z) =∂f1∂x
1 0 00 1 00 0 1
+∂f2∂x
0 −a −g1 −c −i0 −e −k
+∂f3∂x
0 −b −h0 −d −j1 −f −l
.
Por el Teorema 2.4.1 tenemos que el espacio R3 es un álgebra cuya repre-sentación fundamental asociada a la base canónica de R3 se define por
R(e1) =
1 0 00 1 00 0 1
, R(e2) =
0 −a −g1 −c −i0 −e −k
, R(e3) =
0 −b −h0 −d −j1 −f −l
.
El producto tipo A, corresponde a esta álgebra. Por lo tanto, f es A-diferenciable.
Teorema 3.2.2. Sea f : Ω ∈ R3 → R3 Fréchet-diferenciable sobre un con-junto abierto Ω. Suponga que existe seis matrices linelmente independienteB1, ...,B6 ∈M3(R) de los siguientes tipos:
B1 =
1 a 00 −1 00 b 0
,B2 =
0 c 01 0 00 d 0
,B3 =
0 e 00 0 01 f 0
,
B4 =
0 g 10 0 00 h 0
,B5 =
0 i 00 0 10 j 0
,B6 =
0 k 00 −1 00 1 1
,
que son ortogonales a la matriz Jacobiana Df(x, y, x), es decir,
〈Bi, Df(x, y, z)〉 = 0, i = 1, 2, 3, 4, 5, 6.
para todo (x, y, z) ∈ Ω. Entonces A = (R3, ·) es un álgebra con el productotipo B, tal que f es A− diferenciable.

68 Algebrización de sistema de ecuaciones diferenciales autónomo
Prueba.- Calculando el producto interior de las seis matrices conDf(x, y, z)tenemos las siguientes ecuaciones
∂f1∂x
+ a∂f1∂y− ∂f2
∂y+ b
∂f3∂y
= 0,∂f2∂x
+ c∂f1∂y
+ d∂f3∂y
= 0,
∂f3∂x
+ e∂f1∂y− f ∂f2
∂y= 0, g
∂f1∂y
+ h∂f3∂y
+∂f1∂z
= 0,
i∂f1∂y
+ j∂f3∂y
+∂f2∂z
= 0, k∂f1∂y− ∂f2
∂y+ l
∂f3∂y
+∂f3∂z
= 0,
por lo tanto
Df(x, y, z) =∂f1∂y
−a 1 −g−c 0 −i−e 0 −k
+∂f2∂x
1 0 00 1 00 0 1
+∂f3∂x
−b 0 −h−d 0 −j−f 1 −l
.
Por el Teorema 2.4.1 tenemos que el espacio R3 es un álgebra cuya repre-sentación fundamental asociada a la base canónica de R3 se define por
R(e1) =
−a 1 −g−c 0 −i−e 0 −k
, R(e2) =
1 0 00 1 00 0 1
, R(e3) =
−b 0 −h−d 0 −j−f 1 −l
.
El producto Tipo B, corresponde a esta álgebra. Por lo tanto, f es A-diferenciable.
Teorema 3.2.3. Sea f : Ω ∈ R3 → R3 Fréchet-diferenciable sobre un con-junto abierto Ω. Suponga que existe seis matrices linelmente independienteB1, ...,B6 ∈M3(R) de los siguientes tipos:
B1 =
1 0 a0 0 b0 0 −1
,B2 =
0 0 c1 0 d0 0 0
,B3 =
0 0 e0 0 f1 0 0
,
B4 =
0 1 g0 0 h0 0 0
,B5 =
0 0 i0 1 j0 0 −1
,B6 =
0 0 k0 0 l0 1 0
,
que son ortogonales a la matriz Jacobiana Df(x, y, x), es decir,
〈Bi, Df(x, y, z)〉 = 0, i = 1, 2, 3, 4, 5, 6.
para todo (x, y, z) ∈ Ω. Entonces A = (R3, ·) es un álgebra con el productotipo C, tal que f es A− diferenciable.

3.2. Algebrización de campos vectoriales en el espacio 69
Prueba .- Calculando el producto interior de las seis matrices conDf(x, y, z)tenemos las siguientes ecuaciones
∂f1∂x
= −a∂f1∂z− b∂f3
∂z,∂f2∂x
= −c∂f1∂z− d∂f2
∂z,
∂f3∂x
= −e∂f1∂z− f ∂f2
∂z,∂f1∂y
= −g∂f1∂z− h∂f2
∂z,
∂f2∂y
= −i∂f1∂z− j ∂f2
∂z+∂f3∂z
,∂f3∂y
= −k∂f1∂z− l ∂f2
∂z,
por lo tanto
Df(x, y, z) =∂f1∂x
−a −b 1−c −d 0−e −f 0
+∂f2∂z
−b −h 0−d −j 1−f −l 0
+∂f3∂z
1 0 00 1 00 0 1
Por el Teorema 2.4.1 tenemos que el espacio R3 es un álgebra cuya repre-sentación fundamental asociada a la base canónica de R3 se define por
R(e1) =
−a −b 1−c −d 0−e −f 0
, R(e2) =
−b −h 0−d −j 1−f −l 0
, R(e3) =
1 0 00 1 00 0 1
.
El producto Tipo C, corresponde a esta álgebra. Por lo tanto, f es A-diferenciable.

70 Algebrización de sistema de ecuaciones diferenciales autónomo

Chapter 4
Algebrización de sistema de ecuacionesdiferenciales planares no autónomos
En esta sección algebrizaremos sistemas planares no autónomos usando al-gunos resultados que tenemos para sistemas plares autónomos para poderalgebrizar.
Definición 4.0.4. Diremos que un sistema
x = f(t, x, y)y = g(t, x, y),
(4.1)
donde f, g : Ω ⊂ R3 → R son de clase C1 en Ω, Ω es un conjunto abiertode A, es algebrizable si existe un álgebra A = (R2, ∗) y funciones F,G : Ω ⊂A2 → R, Ω es un conjunto abierto de A2, tales que
F (te, (x, y)) = f(t, x, y),
G(te, (x, y)) = g(t, x, y),
donde te es el producto escalar de t ∈ R y e la unidad de R2, y la función H =(F,G), H : Ω ⊂ A2 → A, definida como H(x, y, z, w) = (F (x, y, z, w), G(x, y, z, w)),es A-diferenciable.
En este caso el sistema no autónomo sobre A
dε
dτ= H(τ, ε) (4.2)
es llamado ecuación diferencial algebrizada sobre A, donde H(τ, ε) = (F (τ, ε), G(τ, ε)),τ = (s, t) y ε = (x, y).
Cuando una función H : A×B→ C, que es A-diferenciable y B-diferenciabletenemos que la matriz jacobiana de H está contenida en el producto cruz delas primeras representaciones fundamentales de las álgebras A y B.
71

72Algebrización de sistema de ecuaciones diferenciales planares no
autónomos
Veamos los siguientes ejemplos para comprender la definición. Sea
x =tx
x2 + y2,
y =0,
tenemos que
F (t, s, x, y) =tx
x2 + y2
G(t, s, x, y) =−2y
x2 + y2.
Tenemos que H(τ, ε) = (F (τ, ε), T (τ, ε)), donde τ = (t, s) y ε = (x, y), esA-algebrizable, donde A = (R2, ·) y el producto es el complejo, es decir,(u, v)(x, y) = (ux − vy, uy + vx). Podemos escribir como la ecuación difer-encial algebrizada sobre A
dε
dτ=τ
ε.
Ahora consideremos el siguiente sistema diferencial no autónomo
x =− 1
t3− 2x
t+ tx2 − ty2,
y =− 2y
t+ 2txy + ty2,
podemos escribirla como la ecuación diferencial sobre A
dε
dτ= − 1
τ3− 2ε
τ+ τε2,
Donde A = (R2, ·) y el producto está definido por (u, v)(x, y) = (ux−vy, uy+vx+ vy).
El siguiente resultado nos dice que si yo tengo una solución de (4.2) comopuedo encontrar una solución de (4.1).
Proposición 4.0.5. Si (4.2) es el sistema algebrizable de (4.1), y ε(τ) esuna solución de la ecuación diferencial sobre A

73
dε
dτ= H(τ, ε),
entonces (x(t), y(t)) = ε(te) es una solución del sistema (4.1).
Prueba .- Sea ε una solución de (4.2), la derivada de (x(t), y(t)) con re-specto a t está dada por
d
dt(x(t), y(t)) =
d
dtε(te) =
dε(τ, ε)
dτ|τ=(te)
dτ
dt= H(τ, ε)|τ=(te)e = H(te, ε(te))
= (f(t, x(t), y(t)), g(t, x(t), y(t))).
Así (x(t), y(t)) es una solución de (4.1).
Ahora cosideremos que f y g son polinomios de segundo grado
f(t, x, y) = a0 + a1t+ a2x+ a3y + a4t2 + a5tx+ a6ty + a7x
2 + a8xy + a9y2
g(t, x, y) = b0 + b1t+ b2x+ b3y + b4t2 + b5tx+ b6ty + b7x
2 + b8xy + b9y2
(4.3)
lo que queremos encontrar son F,G que sean algebrizable y que cumpla conF (te, (x, y)) = f(t, x, y) y G(te, (x, y)) = g(t, x, y). Los siguientes resultadosdan condiciones que caracterizan la algebrizabilidad de la ecuación diferen-cial (4.1) con f y g polinomios de segundo grado.
Teorema 4.0.6. Sea A es un álgebra con el producto del tipo I definido porlas constante a y b 6= 0 y f, g son los polinomios (4.3). Los siguientes sonequivalentes
1. La función (x, y) 7→ (f(t, x, y), g(t, x, y)) es A-diferenciable.
2. Las funciones f y g tienen la forma
f(t, x, y) = a0 + a1t+ (b3 − ab2)x− bb2y + a4t2 + (b6 − ab5)tx− bb5ty
+
(b82− ab7
)x2 − 2bb7xy −
b
2b8y
2,
g(t, x, y) = b0 + b1t+ b2x+ b3y + b4t2 + b5tx+ b6ty + b7x
2 + b8xy + (ab82− bb7)y2.

74Algebrización de sistema de ecuaciones diferenciales planares no
autónomos
3. La función H = (F,G) dada por
F (t, s, x, y) = α1s+ α2s2 + α3st+ α4sx+ α5sy + f(t, x, y),
G(t, s, x, y) = β1s+ β2s2 + β3st+ β4sx+ β5sy + g(t, x, y),
es A-diferenciable con respecto a (t, s) y (x, y), donde
α1 = −bb1, α2 = −ba4 − abb4, α3 = −2bb4, α4 = −bb5, α5 = −bb6,β1 = a1 + ab1, β2 = aa4 + a2b4 − bb4, β3 = 2a4 + 2ab4, β4 = b6,β5 = ab6 − bb6.
Prueba .- Si escribimos g(t, x, y) = B0+B1x+B2y+B3x2+B4xy+B5y
2,entonces
B0 = b0+b1t+b4t2, B1 = b2+b5t, B2 = b3+b6t, B3 = b7, B4 = b8, B5 = b9.
y la función (x, y) 7→ (f(t, x, y), g(t, x, y)) es A-diferenciable si y sólo si
f(t, x, y) = A0 +(B2−aB1)x−bB1y+
(1
2B4 − aB3
)x2−2bB3xy−
1
2bB4y
2
por el Corolario 3.1.6 el tipo I. Así, los incisos (1) y (2) son equivalentes.
Considere F y G. Suponga que (f, g) es A-diferenciable como una funciónde (x, y) con respecto a una álgebra con el producto del tipo I, entoncestenemos que cumple con las ecuaciones (3.1), es decir,
∂f
∂x+ a
∂g
∂x− ∂g
∂y= 0
∂f
∂y+ b
∂g
∂x= 0.
La igualdad α4 + aβ4 − β5 = 0 es verificada, entonces tenemos(α4s+
∂f
∂x
)+ a
(β4s+
∂g
∂x
)−(β5s+
∂g
∂y
)= 0,
es decir que∂F
∂x+ a
∂G
∂x− ∂G
∂y= 0.
Tenemos α5 + bβ4 = 0, entonces(α5s+
∂f
∂y
)+ b
(β4s+
∂g
∂x
)= 0,

75
que corresponde a la ecuación
∂F
∂y+ b
∂G
∂x= 0.
Así (x, y) 7→ (F (s, t, x, y), G(s, t, x, t)) es A-diferenciable.Tenemos
∂f
∂t=a1 + 2a4t+ (b6 − ab5)x− bb5y.
∂g
∂t=b1 + 2b4t+ b5x+ b6y.
Usando las igualdades de αi y βi obtenemos
∂f
∂t=
(β1 +
aα1
b
)+(β3 +
aα3
b
)t+ (β4 +
aα4
b)x+
(β5aα5
b
)y,
∂g
∂t= −α1
b− α3
bt− α4
bx− α5
by,
entonces∂f
∂t+(−α1
b− α3
bt− α4
bx− α5
by)
+ (β1 + β3t+ β4x+ β5y) = 0,
(α1 + α3t+ α4x+ α5y) + b∂g
∂t= 0,
Usando las igualdades de αi y βi obtenemos
α3 + aβ3 − 2β2 = 0,
2α2 + bβ3 = 0,
Entonces(α3s+
∂f
∂t
)+ a
(β3s+
∂g
∂t
)− (β1 + 2βs+ β3t+ β4x+ β5y) = 0
(α1 + 2α2s+ α3t+ α4x+ α5y) + b(β3 +∂g
∂t) = 0.
Es decir que cumple con las ecuaciones (3.1)
∂F
∂t+ a
∂G
∂t− ∂G
∂s= 0,
∂F
∂s+ b
∂G
∂t= 0,
así (F,G) son A-diferenciable con respecto a (s, t).Suponga que (F,G) es A-diferenciable como función de (t, s) y como
función de (x, y), entonces (x, y) 7→ f(t, x, y), g(t, x, y)) es A-diferenciable.

76Algebrización de sistema de ecuaciones diferenciales planares no
autónomos
Corolario 4.0.7. Sea A una álgebra con producto del tipo I definido por lasconstantes a y b 6= 0, y f, g los polinoios como (4.3). Suponga que el sistema(4.1) es A-algebrizable, entonces la función (F,G) puede ser escrita como
(F (T,X), G(T,X)) = A0 +A1T +A2X +A3T2 +A4TX +A5X
2,
donde
A0 = (a0, b0), A1 = (a1, b1), A2 = (b3 − ab2, b2), A3 = (a4, b4),A4 = (b6 − ab5, b5), A5 =
(12b8 − ab7, b7
), T = (s, t) y X = (x, y).
Así, la algebrización del sistema es dada por la ecuación de Riccati sobreA
dX
dT= P (T ) +Q(T )X +R(T )X2,
Donde P (T ) = A0 +A1T +A3T2, Q(T ) = A2 +A4T y R(T ) = A5,
Teorema 4.0.8. Sea A es un álgebra con el producto tipo I definido porlas constante a y b = 0 y f, g son los polinomios (4.3). Los siguientes sonequivalentes
1. La función (x, y) 7→ (f(t, x, y), g(t, x, y)) es A-diferenciable
2. Las funciones f y g tienen la forma
f(t, x, y) = a0 + a1t+ (b3 − ab2)x− bb2y + a4t2 + (b6 − ab5)tx− bb5ty
+
(b82− ab7
)x2 − 2bb7xy −
b
2b8y
2,
g(t, x, y) = b0 + b1t+ b2x+ b3y + b4t2 + b5tx+ b6ty + b7x
2 + b8xy +ab82y2.
3. La función H = (F,G) tiene la siguiente forma
F (t, s, x, y) = f(t, x, y),
G(t, s, x, y) = β1s+ β2s2 + β3st+ β4sx+ β5sy + g(t, x, y),
es A-diferenciable con respecto a (s, t) y con respecto a (x, y), donde
β1 = a1 + ab1, β2 = aa4 + a2b4, β3 = 2a4 + 2ab4, β4 = b6, β5 = ab6.

77
Prueba .- La equivalencia entre (1) y (2) se sigue del Teorema 4.0.6.
Considere F y G. Suponga que (f, g) es A-diferenciable como una funciónde (x, y) con respecto a una álgebra con el producto tipo I, entonces tenemos
∂f
∂x+ a
∂g
∂x− ∂g
∂y= 0
∂f
∂y= 0.
La ecuación aβ4 − β5 = 0 se verifica, entonces tenemos que
∂f
∂x+ a
(β4s+
∂g
∂x
)−(β5s+
∂g
∂y
)= 0,
que corresponde a la primerade las siguientes ecuación
∂F
∂x+ a
∂G
∂x− ∂G
∂y=0,
∂x
∂y=0,
la segunda se obtiene, ya que F no depende de y. Así tenemos que cumple conlas ecuaciones (3.1), por lo que tenemos que (x, y) 7→ (F (s, t, x, y), G(s, t, x, t))es A-diferenciable.
Tenemos
∂f
∂t= a1 + 2a4t+ (b6 − ab5)x.
∂g
∂t= b1 + 2b4t+ b5x+ b6y.
Ya que f no depende de S tenemos ∂f∂s = ∂F
∂s = 0, usando las igualdadesde αi y βi obtenemos
∂f
∂t+ a
∂g
∂t− (β1 + β3t+ β4x+ β5y) = 0,
y como aβ3 − 2β2 = 0 obtenemos
∂f
∂t+ a
(β3s+
∂g
∂t
)− (β1 + 2β2s+ β3t+ β4x+ β5y) = 0

78Algebrización de sistema de ecuaciones diferenciales planares no
autónomos
es decir que cumple con las ecuaciones (3.1)
∂F
∂s+ a
∂G
∂s− ∂G
∂t= 0,
∂F
∂s= 0,
Así (F,G) son A-diferenciable con respecto a (s, t).Suponga que (F,G) es A-diferenciable como función de (s, t) y como
función de (x, y), entonces (x, y) 7→ f(t, x, y), g(t, x, y)) es A-diferenciable.
Teorema 4.0.9. Sea A una álgebra con el producto Tipo II definido porla constante a y f, g polinomios como (4.3).Los siguientes resultados sonequivalentes
1. La función (x, y) 7→ (f(t, x, y), g(t, x, y)) es A-diferenciable con re-specto a la variable X = (x, y)
2. Las funciones f y g están dadas por
f(t, x, y) =a0 + a1t+ a2x+ a3y + a4t2 + a5tx+ a6ty −
1
2aa8x
2 + a8xy + a9y2.
g(t, x, y) =b0 + b1t+ (a2 + aa3)y + b4t2 + (a5 + aa6)ty +
(1
2a8 + aa9
)y2.
3. la función H = (F,G),
F (s, t, x, y) = α1s+ α2s2 + α3st+ α4sx+ α5sy + f(t, x, y),
G(s, t, x, y) = g(t, x, y),
es A-diferenciable con respecto a (s, t) y con respecto a (x, y), dondeα1 = b1 − aa1, α2 = a2a4 − ab4, α3 = 2b4 − 2aa4, α4 = −aa5, α5 = a5
Prueba .- Si escribimos f(t, x, y) = A0 +A1x+A2y − 12aA3x
2 +A3xy +A4y
2, entoncesA0 = a0 + a1t + a4t
2, A1 = a2 + a5t, A2 = a3 + a6t, A3 = a8, A4 = a9,B0 = b0 + b1t+ b4t
2
y el mapeo (x, y) 7→ (f(t, x, y), g(t, x, y)) es A-diferenciable si y sólo si
g(t, x, y) = B0 + (A1 + aA2)y +
(1
2A3 + aA4
)y2

79
por el Corolario 3.1.6 Tipo II.
Consideremos F y G. Suponga que (f, g) es A-diferenciable como unafunción de (x, y) con respecto a un álgebra con el producto Tipo II, entoncestenemos que cumple con las ecuaciones (3.2), es decir,
∂f
∂x+ a
∂f
∂y− ∂g
∂x= 0,
∂g
∂y= 0.
La igualdad α4 + aα5 = 0 es verificaao, entonces tenemos(α4s+
∂f
∂x
)+ a
(α5s+
∂f
∂y
)− ∂g
∂y= 0,
∂g
∂x= 0,
que corresponde a las ecuaciones
∂F
∂x+ a
∂F
∂y− ∂G
∂y= 0,
∂G
∂x= 0,
como satisface las ecuaciones (3.2), tenemos que (x, y) 7→ (F (s, t, x, y), G(s, t, x, y))es A-diferenciable.
Ya que las igualdades 2α2 + aα3 = 0 y
∂f
∂t= a1 + 2a4t+ a5x+ a6y,
∂g
∂t= b1 + 2b4t+ (a5 + aa6)y,
se verifican, usando las igualdades de αi tenemos
(α1 + 2α2s+ α3t+ α4x+ α5y) + a
(α3s+
∂f
∂t
)− ∂g
∂t= 0,
∂G
∂s= 0.
Es decir que satisface las ecuaciones (3.2)
∂F
∂s+ a
∂F
∂t− ∂G
∂t= 0,
∂G
∂s= 0.

80Algebrización de sistema de ecuaciones diferenciales planares no
autónomos
Así (F,G) es A-diferenciable con respecto a (s, t).Suponga que (F,G) es A-diferenciable como función de (s, t) y como
función de (x, y), entonces (x, y) 7→ f(t, x, y), g(t, x, y)) es A-diferenciable.
Corolario 4.0.10. Sea A una álgebra con producto del tipo II definido porla constante a, y f, g los polinoios como (4.3). Suponga que el sistema (4.1)es A-algebrizable, entonces la función (F,G) puede ser escrita como
(F (T,X), G(T,X)) = A0 +A1T +A2X +A3T2 +A4TX +A5X
2,
donde T = (s, t) y X = (x, y),
A0 = (a0, b0), A1 = (a1, b1), A2 = (a3, a2 + aa3),
A3 = (a4, b4), A4 = (a6, a5 + aa6), A5 =(a9,
12a8 + aa9
),
Teorema 4.0.11. Sea A una álgebra con el producto del tipo III. Sea f, glos polinomios como (4.3). Los siguientes resultados son equivalentes
1. La función (x, y) 7→ (f(t, x, y), g(t, x, y)) es A-diferenciable con re-specto a la variable X = (x, y)
2. Las funciones f y g tienen la siguiente formaf(t, x, y) = a0 + a2x+ a7x
2
g(t, x, y) = b0 + b1t+ b3y + b4t2 + b6ty + +b9y
2
3. La función H = (F,G) tiene la forma
F (s, t, x, y) = α1s+ α2s2 + α4sx+ f(t, x, y),
G(s, t, x, y) = g(t, x, y),
es A-diferenciable con respecto a (s, t) y (x, y),
Prueba .- Por el Corolario 3.1.6 Tipo III, tenemos que el mapeo (x, y) 7→(f(t, x, y), g(t, x, y)) es A-diferenciable si y sólo si
f(t, x, y) = A0 +A1x+A3x2,
g(t, x, y) = B0 +B2y +B3y2,
81
donde
A0 = a0, A1 = a2 + a5t, A3 = a7,
B0 = b0 + b1t+ b4t2, B2 = b3 + b6t, B3 = b9.
Considere F and G. Suponga que (f, g) es A-diferenciable como una fun-ción de (x, y) con respecto a una álgebra con el producto tipo III, entoncestenemos que satisface las ecuaciones (3.3)
∂f
∂y= 0,
∂g
∂x= 0.
Por lo tanto tenemos que
∂F
∂y= 0,
∂G
∂x= 0,
así tenemos que cumple con las ecuaciones (3.3), entonces (x, y) 7→ (F (s, t, x, y), G(s, t, x, y))es A-diferenciable.Tenemos que satisface las ecuaciones (3.3)
∂F
∂t= 0,
∂G
∂s= 0.
Así (F,G) es A-diferenciable con respecto a(s,t).
Suponga que (F,G) es A-diferenciable como función de (s, t) y como fun-ción de (x, y), entonces (x, y) 7→ f(t, x, y), g(t, x, y)) es A-diferenciable.
Corolario 4.0.12. Sea A una álgebra con producto del tipo III, f, g los poli-noios como (4.3). Suponga que el sistema (4.1) es A-algebrizable, entoncesla función (F,G) puede ser escrita como
(F (T,X), G(T,X)) = A0 +A1T +A2X +A3T2 +A4TX +A5X
2,
donde T = (s, t) y X = (x, y),
A0 = (a0, b0), A1 = (α1, b1), A2 = (a2, b3),
A3 = (α2, b4), A4 = (α4, b6), A5 = (a7, b9).

82Algebrización de sistema de ecuaciones diferenciales planares no
autónomos
Ahora veamoslos siguientes ejemplos, donde al algebrizar obtenemos unaecuación de Riccati.
Ejemplo 4.0.13. Considere el sistema
x = 1 + 7t− x− 3y + 5t2 − tx− 3ty − 6xy − 6y2
y = 1 + t+ x+ y + t2 + tx+ ty + x2 + 4xy + y2,
entonces las derivaddas parciales de f y g satisfacen las ecuaciones
∂f
∂x+ 2
∂g
∂x− ∂g
∂y= 0
∂f
∂y+ 3
∂g
∂x= 0.
Así, (x, y) 7→ (f(t, x, y), g(t, x, y)) es A diferenciable por una álgebra A conel producto Tipo I cuando a = 2 y b = 3. Las condiciones de el teorema sonsatisfacidas, entoncces las funciones F,G son dadas por
F (s, t, x, y) = −3s− 21s2 − 6st− 3sx− 3sy + f(t, x, y),
G(s, t, x, y) = 9s+ 11s2 + 14st+ sx− sy + g(t, x, y).
En términos de las variables T = (t, s) y X = (x, y) de A, (F,G) puede serescrito como
(F (T,X), G(T,X)) = A0 +A1T +A2X +A3T2 +A4TX +A5X
2,
donde
A0 = (1, 1), A1 = (7, 1), A2 = (−1, 1),
A3 = (5, 1), A4 = (−1, 1), A5 = (0, 1).
Ejemplo 4.0.14. Considere el sistema
x = 1 + 2t+ x+ 3y + 5tx− 3
2x2 + 3xy,
y = 2t+ 4y + 5ty +3
2y2,
entonces las derivaddas parciales de f y g satisfacen las ecuaciones (3.2),con a = 1.

83
Así, (x, y) 7→ (f(t, x, y), g(t, x, y)) es A diferenciable por una álgebra Acon el producto Tipo II cuando a = 2. Las funciones F,G son dadas por
F (s, t, x, y) = −4s2 + 8st− 5sx+ 5sy + f(t, x, y),
G(s, t, x, y) = g(t, x, y).
En términos de las variables T = (s, t) y X = (x, y) de A, (F,G) puede serescrito como
(F (T,X), G(T,X)) = A0 +A1T +A2X +A3T2 +A4TX +A5X
2,
donde
A0 = (1, 0), A1 = (2, 2), A2 = (3, 4),
A3 = (0, 4), A4 = (0, 5), A5 = (0, 3/2).
Ejemplo 4.0.15. Considere el sistema
x = 2 + x+ 4x2
y = 1 + t2 + 5ty − 2y2,
entonces las derivaddas parciales de f y g satisfacen las ecuaciones (3.3).
Así, (x, y) 7→ (f(t, x, y), g(t, x, y)) es A diferenciable por una álgebra Acon el producto Tipo III. Las funciones F,G son dadas por
F (s, t, x, y) = 4s+ 3s2 − 2sx+ f(t, x, y),
G(s, t, x, y) = g(t, x, y).
En términos de las variables T = (s, t) y X = (x, y) de A, (F,G) puede serescrito como
(F (T,X), G(T,X)) = A0 +A1T +A2X +A3T2 +A4TX +A5X
2,
donde
A0 = (2, 1), A1 = (4, 0), A2 = (1, 0),
A3 = (3, 1), A4 = (−2, 0), A5 = (4,−2).

84Algebrización de sistema de ecuaciones diferenciales planares no
autónomos

Bibliography
[1] L. V. Ahlfors, Complex Analysis, McGraw-Hill International BookCompany, 1979.
[2] A. Alvarez, M. E. Frias, E. López, C. Yee, On Solving Systemsof Autonomus Ordinary Differential Equations by Reduction to aVariable of an Algebra, in preparation.
[3] V. I. Arnold, Geometrical Methods in the Theory of Ordinary Dif-ferential Equations, Springer-Verlag, 1988. 369-418.
[4] Brown, W. Matrices over Commutative Rings. Monographs andTextbooks in Pure and Applied Mathematics (1992).
[5] E. López-Gónzalez, Dierential equations over algebras, Advancesand Applications in Mathematical Sciences vol. 8, Issue 2, (2011)pp. 189-214.
[6] E. López-Gónzalez, Loeza Luis, Dierenciabilidad y ecuaciones difer-enciales sobre álgebras.
[7] E. Blum, Theory of analytic functions in banach algebras, Trans-actions of the American Society vol. 78, No.2, (1955) pp. 343370.
[8] Ketchum, P. Analytic Functions of Hypercomplex Variables. Trans.Amer. Math. Soc., Vol. 30 (1928), pp. 641-667.
[9] - - - Differential Equations Over Algebras. Advances and Applica-tions in Mathematical Sciences, Vol. 8 Issue, 2 (2011), 189 - 214.
[10] Lorch, E. The Theory of Analytic Functions in Normed AbelianVector Rings, Transactions of the American Mathematical Society,Vol. 54, No. 3 (1943), pp. 414-425.
[11] Marsden, J.; Hoffman, M. Análisis clásico elemental. Addison-Wesley, 2a. ed. (1998).
85

86 BIBLIOGRAPHY
[12] M. Spivack, Calculus on Manifolds, 5th Edition, Westview Press,January 21, 1971.
James A. Ward, A theory of analytic functions in linear associativealgebras, Duke Math. J. vol. 7 (1940) pp. 233-248.
[13] Ward, J. A theory of analytic functions in linear associative alge-bras. Duke Math. J. vol. 7 (1940) pp. 233-248.
[14] Ward, J. From Generalized Cauchy-Riemann Equations to LinearAlgebra. Proc. of the Amer. Math. Soc., Vol. 4, No. 3 (1953), pp.456 -461.