t.. 1994 Parte2.pdf · Balance de material para la fase líquida. ... a un flujo Fo...
33
(ÓVL) ( . (2.14) nes, la dinámica de la fase de vapor puede c o nsiderarse despre- ciable. Balance de componente A: óoFoXAo - ÓFXA = (ÓVLXA) (2.13) dt XA: Fracción masa de A en el evaporador. Balance de material total: óoFo - óF - óvFv - g dt Se debe disponer de una expresión que relacione los cambios de la densidad con la composición y la temperatura: ó = f(XA,T) (2.15) l . Incognitas:F,XA,VL,ó,óv,Fv,T Balance de energía: (2.1 6 ) óoFoCpoTo-óFCpsT+Q-óvFv(CpT+HLV) = \ " "1 " t (' (l t. S- A. t 'r HLv:Entalpía de vaporización del líquido (Se asume constante con la temperatura). Cps: Capacidad calorífica de la solución. Cp: Capacidad calorífica del liquido. (2.18) Cp = f(T) (2.17) Incognitas: Q,Cps,CP Si la presión de descarga (PD) no es muy diferente de la presión en el evaporador (caída de presión pequeña en la lí ne a de salida),el flujo de vapor está dado por la expresión: Fv = Kf[(P-PD)/ÓV]1/2 (2.19) Flujo de solución que sale del evaporador: (2.20) A: Area de sección transversal del evaporador. 31
Transcript of t.. 1994 Parte2.pdf · Balance de material para la fase líquida. ... a un flujo Fo...

(OacuteVL)
(
(214)
nes la dinaacutemica de la fase de vapor puede c onsiderarse despreshy
ciable
Balance de componente A
oacuteoFoXAo - OacuteFXA =~ (OacuteVLXA) (213) dt
XA Fraccioacuten masa de A en el evaporador
Balance de material total
oacuteoFo - oacuteF - oacutevFv - g dt
Se debe disponer de una expresioacuten que relacione los cambios de la
densidad con la composicioacuten y la temperatura
oacute = f(XAT) (215)
l IncognitasFXAVLoacuteoacutevFvT
Balance de energiacutea
(216 )oacuteoFoCpoTo-oacuteFCpsT+Q-oacutevFv(CpT+HLV) = 1 t ( (lt S - A t r
HLvEntalpiacutea de vaporizacioacuten del liacutequido (Se asume constante con
la temperatura) Cps Capacidad caloriacutefica de la solucioacuten Cp
Capacidad caloriacutefica del liquido
(218)Cp = f(T) (217)
Incognitas QCpsCP
Si la presioacuten de descarga (PD) no es muy diferente de la presioacuten
en el evaporador (caiacuteda de presioacuten pequentildea en la liacutenea de
salida)el flujo de vapor estaacute dado por la expresioacuten
Fv = Kf[(P-PD)OacuteV]12 (219)
Flujo de solucioacuten que sale del evaporador
(220)
A Area de seccioacuten transversal del evaporador
31
1
Incognitas P
Presioacuten de la fase de vapor
P = KsPv (221)
Ks Dependeen generalde la composicioacuten y temperatura de la
solucioacuten Para soluciones diluidas su valor es igual al de la
composicioacuten de la solucioacuten (XA)La presioacuten de vapor del liacutequido
puro depende de la temperatura
Ks =f (XA T ) (222) Pv = f(T) (223)
Densidad del vapor
5v = PM (224) RT
M Peso molecular del solvente
I ncognitas KsPv
Finalmente el sistema retroalimentado de control a porta una
ecuacioacuten cuya forma depende del modo de control que se emplee
Q = f(P) (225)
Cuando la velocidad de vaporizacioacuten del liacutequido y el flujo de
vapor (Fv)son muy diferentesla dinaacutemica de la fase de vapor no
puede despreciarse siendo necesario plantear algunas ecuaciones
diferentes a las del modelo anterior
Balance de material para la fase liacutequida
50FoXAO - 5FXA =ordm (5VLXA) (213) dt
50Fo - 5F - Wv = d (5VL) (226) dt
Wv Liacutequido vaporizado (masatiempo)
Balance de material para la fase de vapor
Wv - 5vFv = d (5vVv) ( 2 27) dt
32
Incognitas OFXAVLWVovFvVv
Ecuacioacuten de energa para la fase liacutequida
ooFoGpoTo-oFCpsT-Wv(CpT+HLV)+Q =g (oVLCpsT) (228) dt
Ecuacioacuten de energIacutea para la fase de vapor
Wv(CpT+HLV)-ovFvHv =g (ovVvUv) (229) dt
~
Hv Uv Entalpiacutea y energla interna del vapor a la presioacuten P- y
temperatura Tv
Hv = f ( Tv P - ) (230) Uv = f(TvVv ) (231)
Para obtener la ecuacioacuten (230) o (231) en forma expliacutecitaes
necesario acudir a una de las relaciones de Maxwell y a una
ecuacioacuten de estado
Si se asume comportamiento de gas ideal para el vapor
Hv = CpT + HLV + Cpv(Tv T) (230A)
Uv = CpT + ULV + Cpv(Tv - T) (231A)
Cpv Capacidad caloriacutefica a presioacuten constante del vaporULV
Energa interna de vaporizacioacuten
Incognitas CpsCpTHvUvQP-Tv
Un modelo menos rigurosopero que puede representar con una
aproximacioacuten aceptable el procesoes aquel obtenido asumiendo que
existe equilibrio teacutermico entre las fasesEn este caso se
requiere de una sola ecuacioacuten de energia (la ecuacioacuten 228)
La velocidad de vaporizacioacuten del liacutequido puede expresarse
mediante la siguiente relacioacuten
Wv = KM (P - P - ) (232)
PPresioacuten de vapor de la solucioacuten a la temperatura T P-Presioacuten
que ejerce la fase de vaporKMCoeficienteSe asume constante c on
la presioacuten y la temperatura
33
Incognitas P
Son vaacutelidas las ecuaciones (215)(217)(218)(221) y (223)
Densidad del vapor
~v = PM (233) RTv
Para que las ecuaciones (219)(220) y (225) formen parte del
modeloes necesario substituir P por p
Finalmentepara que el modelo quede completamente especificadoes
necesario plantear la siguiente relacioacuten que hace referencia a
una restriccioacuten fiacutesica del sistema
v = VL + Vv (237)
PerturbacionesFoToXAoPD
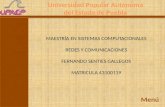
225 A una columna de evaporacioacuten instant~nea (ver figura 25)
se suministra una corriente liacutequida con dos componentes (A y
B) a un flujo Fo (volumentiempo) con una fraccioacuten mol de A
Mopresioacuten Po y temperatura ToLa presioacuten Po es mayor que la
correspondiente al punto de burbuja de la mezclaLa corriente
liacutequida pasa a traveacutes de una vaacutelvulapresentandose un proceso de
expansioacuten isoent~lpicacomo consecuencia la corriente queda a una
presioacuten P menor que la correspondiente al punto de burbuja de la
mezcla liacutequida a Toocurriendo la evaporacioacuten de la misma en la
columna
En las ecuaciones planteadas a continuacioacuten se consideran
despreciables la dinaacutemica de la fase de vapor las moles de vapor
retenidas comparadas con las del liacutequidoy los cambios de
densidad y capacidad caloriacutefica con la composicioacuten y la
temperatura La primera suposicioacuten es razonable si se tiene en
cuenta que en muchos sistemas la densidad del vapor es mucho
menor que la shydel liacutequido
34shy
L-----fc1--lIo L I Q U I O O
~----N1--~ V A POR
AL I M E NT ACION---- -Nl- -IIoJ
~ To
Fl
I FIGURA 25 COLUMNA DE EVAPORACION INSTANTANEA
~ Balance de material
BFo - 6FL - 6vFv - ~ (BVL) (238) dt
6fuXAO (239) Mo
MoMLMv Peso molecular promedio de la solucioacuten que se
sumin istraliacutequido y vapor en la columna YA Fraccioacuten mol del
componente A en el vapor
(240) (241)
6v - PMv (242) RT
Incognitas FLFv6vVLMLMvXAYAP T JEcuacioacuten de energla
6 FoHo - 6FLHL - 6vFvHv = g (6VLCpT ) (243) dt
Ho = (XAoMo)MAHstCpTo (244)
( Hv - (MAMv)YA(CPAT+HLvA)+(l-YA)MB(CPBT+HLvB) (245)
Mv
35
He C~lor de solucioacuten por unidad de masa de Aa la temperatura
de referencia (cero grados)Se asume constante con variaciones 6 la composicioacuten
Incognitas HLHvT
Flujo de liquido y vapor
(246)
~v = K~[(P-PD)ovJ12 (247)
PD Presioacuten a la cual descarga el vapor
Ecuaciones de equilibr io
P = f(TXA) (248) YA = f(TXA) (249)
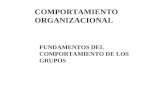
226 En un reactor que contiene una sustancia liacutequida B se
burbujeamediante un distribuidor localizado en el fondo un
compuesto gaseoso A (ver figura 26) En el reactor se lleva a
cabo la reaccioacuten A(g) + B(l) --gt C(l)la cual es de primer 6rdeacuten
con respecto a A y EPuede asumirse que la operacioacuten es
isoteacutermica
fA
FIGURA 26 middotREACTOR CON BURaJJEO GASEOSO
------ ---- bull
-- -
Para que los reactivos entren en contacto se requiereen primer
lugarque el gas A se disuelva en el liacutequidoSe presenta entonces
un proceso de transferencia de materia seguido por una reaccioacuten
quiacutemicaEl mecanismo maacutes lento controla la velocidad global del
procsect6-D- Si la velocidad de transferencia de materia e s peque-
ntildeacomparada con la velocidad de reaccioacutenel efecto cineacutetico es
despreciableel gas se disuelve e inmediatamente reaccionacon lo
cual la concentracioacuten de A en la fase liacutequida seraacute muY baja en
todo momento
En el modelo que se desarrolla a continuacioacutense considera que
tanto la velocidad de transferencia de materia como de reaccioacuten
son de importancia
Balance de material para la fase gaseosa
OAoFA - oAFv - NAAaMA = d (OAVA) (250) dt
NAFlujo de reactivo A a la fase liquida (MolesjtiempoArea)
AaArea de las burbujas de gas HAPeso molecular de A
IncognitasoAFvNAAaVA
El aacuterea de transferencia de materia depende de la presioacuten de
suministro del gas
Aa = f(PAo) ( 2 51)
Balance de componente A en la fase liacutequida
(2 52 )
IncognitasVCACBFL
Balance de componente B en la fase liquida
FBCBO - FLCB -KVCACB =g (VCs) (253) dt
Balance total de materia
37
OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

1
Incognitas P
Presioacuten de la fase de vapor
P = KsPv (221)
Ks Dependeen generalde la composicioacuten y temperatura de la
solucioacuten Para soluciones diluidas su valor es igual al de la
composicioacuten de la solucioacuten (XA)La presioacuten de vapor del liacutequido
puro depende de la temperatura
Ks =f (XA T ) (222) Pv = f(T) (223)
Densidad del vapor
5v = PM (224) RT
M Peso molecular del solvente
I ncognitas KsPv
Finalmente el sistema retroalimentado de control a porta una
ecuacioacuten cuya forma depende del modo de control que se emplee
Q = f(P) (225)
Cuando la velocidad de vaporizacioacuten del liacutequido y el flujo de
vapor (Fv)son muy diferentesla dinaacutemica de la fase de vapor no
puede despreciarse siendo necesario plantear algunas ecuaciones
diferentes a las del modelo anterior
Balance de material para la fase liacutequida
50FoXAO - 5FXA =ordm (5VLXA) (213) dt
50Fo - 5F - Wv = d (5VL) (226) dt
Wv Liacutequido vaporizado (masatiempo)
Balance de material para la fase de vapor
Wv - 5vFv = d (5vVv) ( 2 27) dt
32
Incognitas OFXAVLWVovFvVv
Ecuacioacuten de energa para la fase liacutequida
ooFoGpoTo-oFCpsT-Wv(CpT+HLV)+Q =g (oVLCpsT) (228) dt
Ecuacioacuten de energIacutea para la fase de vapor
Wv(CpT+HLV)-ovFvHv =g (ovVvUv) (229) dt
~
Hv Uv Entalpiacutea y energla interna del vapor a la presioacuten P- y
temperatura Tv
Hv = f ( Tv P - ) (230) Uv = f(TvVv ) (231)
Para obtener la ecuacioacuten (230) o (231) en forma expliacutecitaes
necesario acudir a una de las relaciones de Maxwell y a una
ecuacioacuten de estado
Si se asume comportamiento de gas ideal para el vapor
Hv = CpT + HLV + Cpv(Tv T) (230A)
Uv = CpT + ULV + Cpv(Tv - T) (231A)
Cpv Capacidad caloriacutefica a presioacuten constante del vaporULV
Energa interna de vaporizacioacuten
Incognitas CpsCpTHvUvQP-Tv
Un modelo menos rigurosopero que puede representar con una
aproximacioacuten aceptable el procesoes aquel obtenido asumiendo que
existe equilibrio teacutermico entre las fasesEn este caso se
requiere de una sola ecuacioacuten de energia (la ecuacioacuten 228)
La velocidad de vaporizacioacuten del liacutequido puede expresarse
mediante la siguiente relacioacuten
Wv = KM (P - P - ) (232)
PPresioacuten de vapor de la solucioacuten a la temperatura T P-Presioacuten
que ejerce la fase de vaporKMCoeficienteSe asume constante c on
la presioacuten y la temperatura
33
Incognitas P
Son vaacutelidas las ecuaciones (215)(217)(218)(221) y (223)
Densidad del vapor
~v = PM (233) RTv
Para que las ecuaciones (219)(220) y (225) formen parte del
modeloes necesario substituir P por p
Finalmentepara que el modelo quede completamente especificadoes
necesario plantear la siguiente relacioacuten que hace referencia a
una restriccioacuten fiacutesica del sistema
v = VL + Vv (237)
PerturbacionesFoToXAoPD
225 A una columna de evaporacioacuten instant~nea (ver figura 25)
se suministra una corriente liacutequida con dos componentes (A y
B) a un flujo Fo (volumentiempo) con una fraccioacuten mol de A
Mopresioacuten Po y temperatura ToLa presioacuten Po es mayor que la
correspondiente al punto de burbuja de la mezclaLa corriente
liacutequida pasa a traveacutes de una vaacutelvulapresentandose un proceso de
expansioacuten isoent~lpicacomo consecuencia la corriente queda a una
presioacuten P menor que la correspondiente al punto de burbuja de la
mezcla liacutequida a Toocurriendo la evaporacioacuten de la misma en la
columna
En las ecuaciones planteadas a continuacioacuten se consideran
despreciables la dinaacutemica de la fase de vapor las moles de vapor
retenidas comparadas con las del liacutequidoy los cambios de
densidad y capacidad caloriacutefica con la composicioacuten y la
temperatura La primera suposicioacuten es razonable si se tiene en
cuenta que en muchos sistemas la densidad del vapor es mucho
menor que la shydel liacutequido
34shy
L-----fc1--lIo L I Q U I O O
~----N1--~ V A POR
AL I M E NT ACION---- -Nl- -IIoJ
~ To
Fl
I FIGURA 25 COLUMNA DE EVAPORACION INSTANTANEA
~ Balance de material
BFo - 6FL - 6vFv - ~ (BVL) (238) dt
6fuXAO (239) Mo
MoMLMv Peso molecular promedio de la solucioacuten que se
sumin istraliacutequido y vapor en la columna YA Fraccioacuten mol del
componente A en el vapor
(240) (241)
6v - PMv (242) RT
Incognitas FLFv6vVLMLMvXAYAP T JEcuacioacuten de energla
6 FoHo - 6FLHL - 6vFvHv = g (6VLCpT ) (243) dt
Ho = (XAoMo)MAHstCpTo (244)
( Hv - (MAMv)YA(CPAT+HLvA)+(l-YA)MB(CPBT+HLvB) (245)
Mv
35
He C~lor de solucioacuten por unidad de masa de Aa la temperatura
de referencia (cero grados)Se asume constante con variaciones 6 la composicioacuten
Incognitas HLHvT
Flujo de liquido y vapor
(246)
~v = K~[(P-PD)ovJ12 (247)
PD Presioacuten a la cual descarga el vapor
Ecuaciones de equilibr io
P = f(TXA) (248) YA = f(TXA) (249)
226 En un reactor que contiene una sustancia liacutequida B se
burbujeamediante un distribuidor localizado en el fondo un
compuesto gaseoso A (ver figura 26) En el reactor se lleva a
cabo la reaccioacuten A(g) + B(l) --gt C(l)la cual es de primer 6rdeacuten
con respecto a A y EPuede asumirse que la operacioacuten es
isoteacutermica
fA
FIGURA 26 middotREACTOR CON BURaJJEO GASEOSO
------ ---- bull
-- -
Para que los reactivos entren en contacto se requiereen primer
lugarque el gas A se disuelva en el liacutequidoSe presenta entonces
un proceso de transferencia de materia seguido por una reaccioacuten
quiacutemicaEl mecanismo maacutes lento controla la velocidad global del
procsect6-D- Si la velocidad de transferencia de materia e s peque-
ntildeacomparada con la velocidad de reaccioacutenel efecto cineacutetico es
despreciableel gas se disuelve e inmediatamente reaccionacon lo
cual la concentracioacuten de A en la fase liacutequida seraacute muY baja en
todo momento
En el modelo que se desarrolla a continuacioacutense considera que
tanto la velocidad de transferencia de materia como de reaccioacuten
son de importancia
Balance de material para la fase gaseosa
OAoFA - oAFv - NAAaMA = d (OAVA) (250) dt
NAFlujo de reactivo A a la fase liquida (MolesjtiempoArea)
AaArea de las burbujas de gas HAPeso molecular de A
IncognitasoAFvNAAaVA
El aacuterea de transferencia de materia depende de la presioacuten de
suministro del gas
Aa = f(PAo) ( 2 51)
Balance de componente A en la fase liacutequida
(2 52 )
IncognitasVCACBFL
Balance de componente B en la fase liquida
FBCBO - FLCB -KVCACB =g (VCs) (253) dt
Balance total de materia
37
OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Incognitas OFXAVLWVovFvVv
Ecuacioacuten de energa para la fase liacutequida
ooFoGpoTo-oFCpsT-Wv(CpT+HLV)+Q =g (oVLCpsT) (228) dt
Ecuacioacuten de energIacutea para la fase de vapor
Wv(CpT+HLV)-ovFvHv =g (ovVvUv) (229) dt
~
Hv Uv Entalpiacutea y energla interna del vapor a la presioacuten P- y
temperatura Tv
Hv = f ( Tv P - ) (230) Uv = f(TvVv ) (231)
Para obtener la ecuacioacuten (230) o (231) en forma expliacutecitaes
necesario acudir a una de las relaciones de Maxwell y a una
ecuacioacuten de estado
Si se asume comportamiento de gas ideal para el vapor
Hv = CpT + HLV + Cpv(Tv T) (230A)
Uv = CpT + ULV + Cpv(Tv - T) (231A)
Cpv Capacidad caloriacutefica a presioacuten constante del vaporULV
Energa interna de vaporizacioacuten
Incognitas CpsCpTHvUvQP-Tv
Un modelo menos rigurosopero que puede representar con una
aproximacioacuten aceptable el procesoes aquel obtenido asumiendo que
existe equilibrio teacutermico entre las fasesEn este caso se
requiere de una sola ecuacioacuten de energia (la ecuacioacuten 228)
La velocidad de vaporizacioacuten del liacutequido puede expresarse
mediante la siguiente relacioacuten
Wv = KM (P - P - ) (232)
PPresioacuten de vapor de la solucioacuten a la temperatura T P-Presioacuten
que ejerce la fase de vaporKMCoeficienteSe asume constante c on
la presioacuten y la temperatura
33
Incognitas P
Son vaacutelidas las ecuaciones (215)(217)(218)(221) y (223)
Densidad del vapor
~v = PM (233) RTv
Para que las ecuaciones (219)(220) y (225) formen parte del
modeloes necesario substituir P por p
Finalmentepara que el modelo quede completamente especificadoes
necesario plantear la siguiente relacioacuten que hace referencia a
una restriccioacuten fiacutesica del sistema
v = VL + Vv (237)
PerturbacionesFoToXAoPD
225 A una columna de evaporacioacuten instant~nea (ver figura 25)
se suministra una corriente liacutequida con dos componentes (A y
B) a un flujo Fo (volumentiempo) con una fraccioacuten mol de A
Mopresioacuten Po y temperatura ToLa presioacuten Po es mayor que la
correspondiente al punto de burbuja de la mezclaLa corriente
liacutequida pasa a traveacutes de una vaacutelvulapresentandose un proceso de
expansioacuten isoent~lpicacomo consecuencia la corriente queda a una
presioacuten P menor que la correspondiente al punto de burbuja de la
mezcla liacutequida a Toocurriendo la evaporacioacuten de la misma en la
columna
En las ecuaciones planteadas a continuacioacuten se consideran
despreciables la dinaacutemica de la fase de vapor las moles de vapor
retenidas comparadas con las del liacutequidoy los cambios de
densidad y capacidad caloriacutefica con la composicioacuten y la
temperatura La primera suposicioacuten es razonable si se tiene en
cuenta que en muchos sistemas la densidad del vapor es mucho
menor que la shydel liacutequido
34shy
L-----fc1--lIo L I Q U I O O
~----N1--~ V A POR
AL I M E NT ACION---- -Nl- -IIoJ
~ To
Fl
I FIGURA 25 COLUMNA DE EVAPORACION INSTANTANEA
~ Balance de material
BFo - 6FL - 6vFv - ~ (BVL) (238) dt
6fuXAO (239) Mo
MoMLMv Peso molecular promedio de la solucioacuten que se
sumin istraliacutequido y vapor en la columna YA Fraccioacuten mol del
componente A en el vapor
(240) (241)
6v - PMv (242) RT
Incognitas FLFv6vVLMLMvXAYAP T JEcuacioacuten de energla
6 FoHo - 6FLHL - 6vFvHv = g (6VLCpT ) (243) dt
Ho = (XAoMo)MAHstCpTo (244)
( Hv - (MAMv)YA(CPAT+HLvA)+(l-YA)MB(CPBT+HLvB) (245)
Mv
35
He C~lor de solucioacuten por unidad de masa de Aa la temperatura
de referencia (cero grados)Se asume constante con variaciones 6 la composicioacuten
Incognitas HLHvT
Flujo de liquido y vapor
(246)
~v = K~[(P-PD)ovJ12 (247)
PD Presioacuten a la cual descarga el vapor
Ecuaciones de equilibr io
P = f(TXA) (248) YA = f(TXA) (249)
226 En un reactor que contiene una sustancia liacutequida B se
burbujeamediante un distribuidor localizado en el fondo un
compuesto gaseoso A (ver figura 26) En el reactor se lleva a
cabo la reaccioacuten A(g) + B(l) --gt C(l)la cual es de primer 6rdeacuten
con respecto a A y EPuede asumirse que la operacioacuten es
isoteacutermica
fA
FIGURA 26 middotREACTOR CON BURaJJEO GASEOSO
------ ---- bull
-- -
Para que los reactivos entren en contacto se requiereen primer
lugarque el gas A se disuelva en el liacutequidoSe presenta entonces
un proceso de transferencia de materia seguido por una reaccioacuten
quiacutemicaEl mecanismo maacutes lento controla la velocidad global del
procsect6-D- Si la velocidad de transferencia de materia e s peque-
ntildeacomparada con la velocidad de reaccioacutenel efecto cineacutetico es
despreciableel gas se disuelve e inmediatamente reaccionacon lo
cual la concentracioacuten de A en la fase liacutequida seraacute muY baja en
todo momento
En el modelo que se desarrolla a continuacioacutense considera que
tanto la velocidad de transferencia de materia como de reaccioacuten
son de importancia
Balance de material para la fase gaseosa
OAoFA - oAFv - NAAaMA = d (OAVA) (250) dt
NAFlujo de reactivo A a la fase liquida (MolesjtiempoArea)
AaArea de las burbujas de gas HAPeso molecular de A
IncognitasoAFvNAAaVA
El aacuterea de transferencia de materia depende de la presioacuten de
suministro del gas
Aa = f(PAo) ( 2 51)
Balance de componente A en la fase liacutequida
(2 52 )
IncognitasVCACBFL
Balance de componente B en la fase liquida
FBCBO - FLCB -KVCACB =g (VCs) (253) dt
Balance total de materia
37
OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Incognitas P
Son vaacutelidas las ecuaciones (215)(217)(218)(221) y (223)
Densidad del vapor
~v = PM (233) RTv
Para que las ecuaciones (219)(220) y (225) formen parte del
modeloes necesario substituir P por p
Finalmentepara que el modelo quede completamente especificadoes
necesario plantear la siguiente relacioacuten que hace referencia a
una restriccioacuten fiacutesica del sistema
v = VL + Vv (237)
PerturbacionesFoToXAoPD
225 A una columna de evaporacioacuten instant~nea (ver figura 25)
se suministra una corriente liacutequida con dos componentes (A y
B) a un flujo Fo (volumentiempo) con una fraccioacuten mol de A
Mopresioacuten Po y temperatura ToLa presioacuten Po es mayor que la
correspondiente al punto de burbuja de la mezclaLa corriente
liacutequida pasa a traveacutes de una vaacutelvulapresentandose un proceso de
expansioacuten isoent~lpicacomo consecuencia la corriente queda a una
presioacuten P menor que la correspondiente al punto de burbuja de la
mezcla liacutequida a Toocurriendo la evaporacioacuten de la misma en la
columna
En las ecuaciones planteadas a continuacioacuten se consideran
despreciables la dinaacutemica de la fase de vapor las moles de vapor
retenidas comparadas con las del liacutequidoy los cambios de
densidad y capacidad caloriacutefica con la composicioacuten y la
temperatura La primera suposicioacuten es razonable si se tiene en
cuenta que en muchos sistemas la densidad del vapor es mucho
menor que la shydel liacutequido
34shy
L-----fc1--lIo L I Q U I O O
~----N1--~ V A POR
AL I M E NT ACION---- -Nl- -IIoJ
~ To
Fl
I FIGURA 25 COLUMNA DE EVAPORACION INSTANTANEA
~ Balance de material
BFo - 6FL - 6vFv - ~ (BVL) (238) dt
6fuXAO (239) Mo
MoMLMv Peso molecular promedio de la solucioacuten que se
sumin istraliacutequido y vapor en la columna YA Fraccioacuten mol del
componente A en el vapor
(240) (241)
6v - PMv (242) RT
Incognitas FLFv6vVLMLMvXAYAP T JEcuacioacuten de energla
6 FoHo - 6FLHL - 6vFvHv = g (6VLCpT ) (243) dt
Ho = (XAoMo)MAHstCpTo (244)
( Hv - (MAMv)YA(CPAT+HLvA)+(l-YA)MB(CPBT+HLvB) (245)
Mv
35
He C~lor de solucioacuten por unidad de masa de Aa la temperatura
de referencia (cero grados)Se asume constante con variaciones 6 la composicioacuten
Incognitas HLHvT
Flujo de liquido y vapor
(246)
~v = K~[(P-PD)ovJ12 (247)
PD Presioacuten a la cual descarga el vapor
Ecuaciones de equilibr io
P = f(TXA) (248) YA = f(TXA) (249)
226 En un reactor que contiene una sustancia liacutequida B se
burbujeamediante un distribuidor localizado en el fondo un
compuesto gaseoso A (ver figura 26) En el reactor se lleva a
cabo la reaccioacuten A(g) + B(l) --gt C(l)la cual es de primer 6rdeacuten
con respecto a A y EPuede asumirse que la operacioacuten es
isoteacutermica
fA
FIGURA 26 middotREACTOR CON BURaJJEO GASEOSO
------ ---- bull
-- -
Para que los reactivos entren en contacto se requiereen primer
lugarque el gas A se disuelva en el liacutequidoSe presenta entonces
un proceso de transferencia de materia seguido por una reaccioacuten
quiacutemicaEl mecanismo maacutes lento controla la velocidad global del
procsect6-D- Si la velocidad de transferencia de materia e s peque-
ntildeacomparada con la velocidad de reaccioacutenel efecto cineacutetico es
despreciableel gas se disuelve e inmediatamente reaccionacon lo
cual la concentracioacuten de A en la fase liacutequida seraacute muY baja en
todo momento
En el modelo que se desarrolla a continuacioacutense considera que
tanto la velocidad de transferencia de materia como de reaccioacuten
son de importancia
Balance de material para la fase gaseosa
OAoFA - oAFv - NAAaMA = d (OAVA) (250) dt
NAFlujo de reactivo A a la fase liquida (MolesjtiempoArea)
AaArea de las burbujas de gas HAPeso molecular de A
IncognitasoAFvNAAaVA
El aacuterea de transferencia de materia depende de la presioacuten de
suministro del gas
Aa = f(PAo) ( 2 51)
Balance de componente A en la fase liacutequida
(2 52 )
IncognitasVCACBFL
Balance de componente B en la fase liquida
FBCBO - FLCB -KVCACB =g (VCs) (253) dt
Balance total de materia
37
OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

L-----fc1--lIo L I Q U I O O
~----N1--~ V A POR
AL I M E NT ACION---- -Nl- -IIoJ
~ To
Fl
I FIGURA 25 COLUMNA DE EVAPORACION INSTANTANEA
~ Balance de material
BFo - 6FL - 6vFv - ~ (BVL) (238) dt
6fuXAO (239) Mo
MoMLMv Peso molecular promedio de la solucioacuten que se
sumin istraliacutequido y vapor en la columna YA Fraccioacuten mol del
componente A en el vapor
(240) (241)
6v - PMv (242) RT
Incognitas FLFv6vVLMLMvXAYAP T JEcuacioacuten de energla
6 FoHo - 6FLHL - 6vFvHv = g (6VLCpT ) (243) dt
Ho = (XAoMo)MAHstCpTo (244)
( Hv - (MAMv)YA(CPAT+HLvA)+(l-YA)MB(CPBT+HLvB) (245)
Mv
35
He C~lor de solucioacuten por unidad de masa de Aa la temperatura
de referencia (cero grados)Se asume constante con variaciones 6 la composicioacuten
Incognitas HLHvT
Flujo de liquido y vapor
(246)
~v = K~[(P-PD)ovJ12 (247)
PD Presioacuten a la cual descarga el vapor
Ecuaciones de equilibr io
P = f(TXA) (248) YA = f(TXA) (249)
226 En un reactor que contiene una sustancia liacutequida B se
burbujeamediante un distribuidor localizado en el fondo un
compuesto gaseoso A (ver figura 26) En el reactor se lleva a
cabo la reaccioacuten A(g) + B(l) --gt C(l)la cual es de primer 6rdeacuten
con respecto a A y EPuede asumirse que la operacioacuten es
isoteacutermica
fA
FIGURA 26 middotREACTOR CON BURaJJEO GASEOSO
------ ---- bull
-- -
Para que los reactivos entren en contacto se requiereen primer
lugarque el gas A se disuelva en el liacutequidoSe presenta entonces
un proceso de transferencia de materia seguido por una reaccioacuten
quiacutemicaEl mecanismo maacutes lento controla la velocidad global del
procsect6-D- Si la velocidad de transferencia de materia e s peque-
ntildeacomparada con la velocidad de reaccioacutenel efecto cineacutetico es
despreciableel gas se disuelve e inmediatamente reaccionacon lo
cual la concentracioacuten de A en la fase liacutequida seraacute muY baja en
todo momento
En el modelo que se desarrolla a continuacioacutense considera que
tanto la velocidad de transferencia de materia como de reaccioacuten
son de importancia
Balance de material para la fase gaseosa
OAoFA - oAFv - NAAaMA = d (OAVA) (250) dt
NAFlujo de reactivo A a la fase liquida (MolesjtiempoArea)
AaArea de las burbujas de gas HAPeso molecular de A
IncognitasoAFvNAAaVA
El aacuterea de transferencia de materia depende de la presioacuten de
suministro del gas
Aa = f(PAo) ( 2 51)
Balance de componente A en la fase liacutequida
(2 52 )
IncognitasVCACBFL
Balance de componente B en la fase liquida
FBCBO - FLCB -KVCACB =g (VCs) (253) dt
Balance total de materia
37
OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

He C~lor de solucioacuten por unidad de masa de Aa la temperatura
de referencia (cero grados)Se asume constante con variaciones 6 la composicioacuten
Incognitas HLHvT
Flujo de liquido y vapor
(246)
~v = K~[(P-PD)ovJ12 (247)
PD Presioacuten a la cual descarga el vapor
Ecuaciones de equilibr io
P = f(TXA) (248) YA = f(TXA) (249)
226 En un reactor que contiene una sustancia liacutequida B se
burbujeamediante un distribuidor localizado en el fondo un
compuesto gaseoso A (ver figura 26) En el reactor se lleva a
cabo la reaccioacuten A(g) + B(l) --gt C(l)la cual es de primer 6rdeacuten
con respecto a A y EPuede asumirse que la operacioacuten es
isoteacutermica
fA
FIGURA 26 middotREACTOR CON BURaJJEO GASEOSO
------ ---- bull
-- -
Para que los reactivos entren en contacto se requiereen primer
lugarque el gas A se disuelva en el liacutequidoSe presenta entonces
un proceso de transferencia de materia seguido por una reaccioacuten
quiacutemicaEl mecanismo maacutes lento controla la velocidad global del
procsect6-D- Si la velocidad de transferencia de materia e s peque-
ntildeacomparada con la velocidad de reaccioacutenel efecto cineacutetico es
despreciableel gas se disuelve e inmediatamente reaccionacon lo
cual la concentracioacuten de A en la fase liacutequida seraacute muY baja en
todo momento
En el modelo que se desarrolla a continuacioacutense considera que
tanto la velocidad de transferencia de materia como de reaccioacuten
son de importancia
Balance de material para la fase gaseosa
OAoFA - oAFv - NAAaMA = d (OAVA) (250) dt
NAFlujo de reactivo A a la fase liquida (MolesjtiempoArea)
AaArea de las burbujas de gas HAPeso molecular de A
IncognitasoAFvNAAaVA
El aacuterea de transferencia de materia depende de la presioacuten de
suministro del gas
Aa = f(PAo) ( 2 51)
Balance de componente A en la fase liacutequida
(2 52 )
IncognitasVCACBFL
Balance de componente B en la fase liquida
FBCBO - FLCB -KVCACB =g (VCs) (253) dt
Balance total de materia
37
OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

-- -
Para que los reactivos entren en contacto se requiereen primer
lugarque el gas A se disuelva en el liacutequidoSe presenta entonces
un proceso de transferencia de materia seguido por una reaccioacuten
quiacutemicaEl mecanismo maacutes lento controla la velocidad global del
procsect6-D- Si la velocidad de transferencia de materia e s peque-
ntildeacomparada con la velocidad de reaccioacutenel efecto cineacutetico es
despreciableel gas se disuelve e inmediatamente reaccionacon lo
cual la concentracioacuten de A en la fase liacutequida seraacute muY baja en
todo momento
En el modelo que se desarrolla a continuacioacutense considera que
tanto la velocidad de transferencia de materia como de reaccioacuten
son de importancia
Balance de material para la fase gaseosa
OAoFA - oAFv - NAAaMA = d (OAVA) (250) dt
NAFlujo de reactivo A a la fase liquida (MolesjtiempoArea)
AaArea de las burbujas de gas HAPeso molecular de A
IncognitasoAFvNAAaVA
El aacuterea de transferencia de materia depende de la presioacuten de
suministro del gas
Aa = f(PAo) ( 2 51)
Balance de componente A en la fase liacutequida
(2 52 )
IncognitasVCACBFL
Balance de componente B en la fase liquida
FBCBO - FLCB -KVCACB =g (VCs) (253) dt
Balance total de materia
37
OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

OBFB + oAoFA - OFL - OAFv = d (OV + OAVA) (254) dt
Flujo de transferencia de materia
( 2 55)
CAConcentracioacuten de equilibrio de A en la interfasePuede
considerarse constante despreciando
KL Coeficiente de transferencia de
los efectos de
materia La tra
presioacuten
nsferencia de
materia es generalmente limitada
peliacutecula liacutequida estancada
por la difusioacuten a traveacutes de la
Ecuaciones de estado
OA = PAMA (256) o=f(CACB) (257) RT
IncognitasoPA
Ecuaciones para los sistemas de control
Fv = f(PA) (258) FL =f(PAV-Vo) (259) A
VoVolumen de liacutequido hasta la linea de salida
VA + V = Volumen del recipiente (260)
La seleccioacuten de las ecuaciones de balance de material que
conforman el modelodebe hacerse de forma tal que permita el
empleo del maacuteximo nuacutemero de estas ecuaciones Por ejemploel
empleo de los balances de material total y de componentes A y B soacutelo aportara tres ecuaciones al modelo
227 El modelo que representa la dinaacutemica de un intercambiador I bull
de tubos concentrlcosse puede desarrollar con base en el
esquema presentado en la figura 27aUn liacutequido a una temperashy
tura To y con un flujo Fo fluye por el tubo interiorEste
liacutequido es enfriado por otro que fluye en contracorriente por el
tubo exteriorentrando a una temperatura Teo y con flujo FeoLas
peacuterdidas de calor al exterior son despreciables
38
FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

FcoTco
l~ --dX
Fo -Ts
To Te -Tw
v --- T
J
x a- b-
FIGURA 2 _7 INTERCAMBIADOR DE TUBOS CONCKNTRICOS
En el modelo que se desarrolla a continuacioacuten se ~~ume que las
capacidades caloriacuteficas y las densidades son constantes
El balance de energla del fluido que circula por el tubo
interior debe plantearse para un elemento diferencial (ver
figura 27b)pu~s la temperatura varfa con el tiempo y la
posicioacutenA continuacioacuten se especifican los teacuterminos con los
cuales se conforma la ecuacioacuten que representa este balance
Entalpla que entra al elementoovACpT
~Entalpla que sale del elementoovACpT+ 30vACpTdX ax
Calor que entra por conduccioacuten en XqA - I
Calor que sale por conduccioacuten en X+dXqA+~qAdX ax 1
Calor transferidoh~ITD~(T-Tw)dX
Acumulacioacuten de energa a oACpTdX at
Agrupando los anteriores teacuterminos se obtiene
dI =-v~ + hiITDi(T-Tw) + o (261) dt ax oACp
A Area de seccioacuten transversal del tubo interiorhi Coeficiente
pelicular en la pared interior del tubo inte rioro Difusividad
teacutermica
39
l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

l
1
Si se desprecia la conduccioacuten axial
aT =-v~ + h~nD1(T - Tw) (261A) at ax oACp
En _ la derivacioacuten de cada uno de los teacuterminos que conducen a la
ecuacioacuten (261)se han hecho las siguientes suposiciones
simplificantes
- No hay cambio de fase del liacutequido que circula por el tubo
- La velocidad y temperatura del fluido son uniformes en la
direccioacuten radial (no hay distribucioacuten en esta dire ccioacuten)
La expansioacuten de la pared metaacutelica es despreciable (el aacuterea
de seccioacuten transversal para flujo es constante)
Balance de energiacutea para la pared del tubo interior
aTw = hi nDi (T-Tw) honDo(Tw-To) (262) ot owAwCpw owAwCpw
hoCoeficiente pelicular en la pared externa del tubo interior
DoDiaacutemetro de la pared externa del tubo interior AwArea de la
seccioacuten transversal de la pared del tubo interior
En la deduccioacuten de la ecuacioacuten (262) se asume que la pared
metaacutelica tiene una alta conductividad teacutermicacon lo cual se
puede despreciar la distribucioacuten de temperatura en la direccioacuten
radial Igualmente se desprecia la conduccioacuten axial
IBalance de energla para el fluido que circula por el tubo
exterior
= vc-ordf-To + honDo(Tw-Tc ) henDeTc-Tcro) (263) a1lt ocAcCpc ocAcCpc
heCoeficiente pelicular en la pared interior del tubo exterior f
AcArea de la seccioacuten transversal disponible para flujo del
fluido frio TeoTemperatura en la cara interna de la pared
exterior (r=O)
40
Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Balance de energa para la pared metaacutelica del tubo exteriorEn la
deduccioacuten de esta ecuacioacuten se toma como elemento diferencial una
envoltura ciliacutendrica de radio r y espesor dr
aTe at
= ~ r
-ordf[r eacutel Te] ar eacutelr
(264)
aeDifusividad teacutermica de la pared del
Para r=O (condicioacuten liacutemite)
tubo exterior
aTe eacutelr
= -he(To-Teo) Ke
(265)
KeConductividad teacutermica de la pared e
IncognitasTTwTcTeoTe
PerturbacionesFoToFooTco
xterior
228 Una corriente gaseosa de un compuesto puro (A)entra a un
tanque donde es mezclada con otra corriente de concentracioacuten CAO
(molvolumen) El gas mezclado que sale del tanque fluye a un
separador donde el compuesto A del gas se difundea traveacutes de una
membrana semipermeable en un lquido puro (ver figura 28) el
cual fluye en el equipo a un flujo constante Si el proceso es
isoteacutermico y la cantidad de gas disuelto no afecta significativashy
mente el flujo de cada una de las fases obtener el modelo que
describe la dinaacutemica de este proceso
TANQUE SEPARADOR PA Fo
A PURO VP
GAS
PD - ~F CA
CA11-----shy MEMBRANA
Ir FL LIQUIDO PURO
41
Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Balances de materia en el tanque
(266)
(267)
MAPeso molecular de A
que las caidas de presioacuten en el proceso son peshy
quentildeaslas ecuaciones para flujo de gas en el tanque son
(268) (269)
(270) IncognitasPP2
Ecuaciones de estado
(271)
M es el peso molecular promedio del gasAsumie ndo que los cambios
de la densidad con la composicioacuten son despreciableslas ecuacioshy
nes para el separador son las que se presentan a continuacioacuten
o = PMRT (270)
Balances de materia en el separador
(2 72)
(273)
(274)
IncognitasFCANACAL
Velocidad de transferencia de materia a traveacutes de la membrana
(275)
Ecuacioacuten para el flujo de salida de gas en el separador
F = K4(P - PD) (276)
PerturbacionesPAP~CAoPD
42
BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

BIBLIOGRAFiacuteA
LUYBEN WL Process modelingsimulation and control for chemical
engineers Mc Graw Hill1973558p
STEPHANOUPULUS GEORGE Chemical process controlPrintice
Hall1984694p
SMITH CARLOS A CORRIPIO ARMANDO B Principles and pract ice of
automatic process controlJohn Wiley amp Sons1985614p
( COHEN WILLIAM C JOHNSOSN ERNEST F Dynamics charateristics of
double-pipe heat exchangers Ind Eng Chem vol 48 Nordm6 1031shy
341956
3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

3 COMPORTAMIENTO DINAMICO DE SISTEMAS
El estudio del comportamiento dinaacutemico de un proceso parte de 1
desarrollo del modelo que describe la dinaacutemica del mismo Este
modelo es posteriormente resueltoobteniendose las relaciones que
establecen la forma de cambio de las diferentes variables con el
tiempo
El contenido de esta unidad no estaacute orientado a la discusioacuten de
los procedimientos que conducen a la solucioacuten de un modelosino a
la determinacioacuten y conceptualizacioacuten de los paraacutemetros que
caracterizan la dinaacutemica de un procesoPor esta razoacuten los
procesos aqul analizados son relativamente simples
El anaacutelisis se limitaraacute a aquellos sistemas cuya dinaacutemica estaacute
representada por ecuaciones diferenciales lineales (sistemas
lineales)Las razones para tal limitacioacuten son
- La teoriacutea general disponible para el disentildeo d sistemas de
controlse ha desarrollado con base en sistemas lineales
No existe una teoriacutea general para la solucioacuten de ecuaciones
diferenciales no lineales Por tantoel an~lisis de los sisteshy
mas representados por este tipo de ecuacionesmediante teacutecnicas
matemaacuteticassolo es posible en casos muy especiacuteficos
- Cualquier sistema no lineal puede aproximarse aceptablemente a
uno lineal alrededor de algunas condiciones de operacioacuten Esta
aproximacioacuten es de suma importanciapueacutes posibilita el anaacutelisis
de sistemas representados por ecuaciones no linealesmediante
la teacutecnica de aquellos que son lineales
31 DUWUCA 8N EL ~~ IlliJ TJEMPQ ~
En esta unidad se estudiaraacute el comportamiento dinaacutemico de 106
sistemas empleando como herramienta el meacutetodo general de solucioacuten
de ecuaciones diferenciales en el dominio del tiempo y el dominio
de Laplace
44
1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

1 r
J I
311 CLASIFICACION DINAHICA DE LOS SISTEMAS Dinbicamente los sistemas se clasifican atendiendo a diferentes puntos de vista
i- De acuerdo al nuacutemero de variables independientes
- De paraacutemetros concentradosEl tiempo es la uacutenica variable
independiente Son descritos por ecuaciones diferenciales
ordinarias I
De paraacutemetros distribuidosEn el modelo hay mas de una
variable independientegeneralmente el tiempo y coordenadas
espacialesSe describen mediante ecuaciones diferenciales
parciales
ii- De acuerdo a la linealidad
- Lineales Todas las funciones que describen el sistema son
lineales
- No linealesAlguna de las funciones que describen el
sistema es no lineal
iii- De acuerdo a la estabilidad
- EstablesSon sistemas autoreguladoslas variables de
salida convergen a alguacuten valor de estado establedespueacutes de
haberse perturbado el sistema
- Inestables Las variables de salida cambian indefinidamente
el tiempo --- - gt bull con ogt~~ ~-- I ~_ -1-1 I
iv- De aQuerdo con el ~rd~n de las ecuaciones diferencialesEl 1N -shy
ordeacuten de un sistema lo determina el ordeacuten de las ecuacioshy---shynes diferenciales que lo representan
312 PERTURBACIONESA continuacioacuten se presentan los tipos de
perturbacioacuten maacutes usualmentre encontrados en el control de
procesos 1shy
3121 PERTURBACION ESCALON Es una funcioacuten que cambia
instantane~nte de un valor a otro continuando con este uacuteltimo - dValUL l1atematicamente se efine como
tltO
f( t J= tgtO
Si la magnitud del cambio es la unidad la funcioacuten se denomina
escaloacuten unitaria y se representa por
45
(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

(J
r
tltO
u(tl= tgtO
Esta perturbacioacuten se representa griexclficamente en la figura 31aEs
el tipo de perturbacioacuten que maacutes comunmente se presenta en los
procesos quiacutemicos
3_1_2_2 PKRTURBACION PULSOEs una funcioacuten arbitraria que empieza
y teacutermina en el mismo nivelEn la figura 31b se muestra una de
las formas maacutes comunes de esta funcioacuten (rectangular)La funcioacuten
pulso rectangular se caracteriza por su magnitud de cambio (K) y
duracioacuten (D)y se define por
tltO OlttltDf(tl=~
tgtD
Esta funcioacuten puede representarse como la diferencia de dos
funciones escaloacuten de igual magnitudKla primera funcioacuten ocurre
en el tiempo t=Omientras la segunda se presenta con un atraso de
D unidades de tiempoEntonces ~ LI r iexcl bull n
f(t) = Ku(t) - Ku(t-D) ~
Si la amplitud es D y la magnitud de cambio liD la funcioacuten s e denomina pulso unitaria y el aacuterea bajo la curva es 1
3_1_2_3 PKRTURBACION IMPULSO UNITARIA Si la duracioacuten D de una
funcioacuten pulso unitaria se aproxima a cerola magnitud del cambio
se aproxima a infinitoy el aacuterea bajo la curva seraacute siempre igual
a 1
Lim (D x liD) = 1 D-gtO
En este caso se obtiene la funcioacuten mostrada en la figura 31cla
cuaacutel se denomina impulso unitaria o Dirac Se define como cero
para todo tiempo excepto para t=O
46
31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

31~4 PKRTURBACION RAMPAEs una funcioacuten que cambia li ~ ~almente
con el tiempoSe define como
i tltO
f(t)= O
lKt tgtO
3125 PKRTURBACION SRNOIDAL Corresponde a las funciones seno y
cosenoSe define por
tltO o tltO f(t)=10 f(t)=
ASenwt tgtO ACoswt tgt )tAAmplitud w Frecuencia
Esta perturbacioacuten se representa graacuteficamente en la figur~ 31d
bull t
f(t) f(t)
KK
D tt
a-FUNCION ESCALON b-FUNCION PULSO RECTANGULAR
f (t) f(t)
(
t
e-IMPULSO UNITARIA d-FUNCION SENO
FIGURA 3 1 FUNCIO~ DE PKRTURBACION L
313 VARIABLES DE DESVIACION Estas variables se definen con
base en su valor de estado estable Para una variable X( t) su
correspondiente variable de desviacioacuten X(t)es
47
- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

- --
x - ( t) = x ( t) - x
El subiacutendice e J indica valor de estado estacionario El concepto1
de variable de desviacioacuten se ilustra en la figura 32Las
principales ventajas que se derivan del empleo de este tipo de
variables son
Si el punto de arranque es el nivel do operacioacuten de estado
establelas condiciones iniciales de todas lamps variables son
ceroEsto hace que en las ecuaciones diferenciales ordinarias
los teacuterminos constantes originados por condiciones inicialesse
anulen
- Lo fundamental en el an~lisis del control de un proceso es la
magni tud de cambio de las variables antes que sus valores
absolutos Las variables de desviacioacuten muestran esta magnitud
directamente
x(t)
l
Xe
FIGURA 3_2 VARIABLES DE DESVIACION
(
314 LINEALIZACION Es e 1 procedimiento mediante e 1 cual un l
sistema no lineal se aproxima a uno linealSupongase que la
dinaacutemica de un proceso se describe por la siguiente ecuacioacuten
diferencial no lineal
dX - f(X) dt
48
Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Expandiendo la funcioacuten no lineal f(X) en una serie de Taylor
alrededor del punto Xose obtiene
f(X) ~ f(Xo)+(df)(X-Xo)+(d 2 f) (X-Xo)2+(d3 f) (X-XO)3 dX dX2 2 dX3 3
Desprec iando los teacuterminos de p rdeacuten igual y superior a dos se
obtiene como expresioacuten para f(X)
f(X) = f(Xo)+(df) (X-Xo) ( 3 1 ) dX
La ecuacioacuten (31) es justamente la ecuacioacuten de la liacutenea tangente
la curva f(X) en el punto Xocomo se ilustra en la figura
33De eacutesta figura puede concluirse que
- La funcioacuten lineal se aproxima bastante bieacuten a la no linealen
las vecindades del punto alrededor del cual se hace la
expansioacuten lejos de este punto la desviacioacuten puede ser
apreciable )
El tamantildeo de la regioacuten en la cual existe un bueacuteri grado de
aproximac ioacuten depende de la forma de la curva en los puntos
proacuteximos a aquel alrededor del cual se hizo la expansioacuten (ver
figura 33)
Felt
-===~~ECUAC I ON (3 1)
F(xol
Xo x
- r r tFIGURA 33 REPRESENTACION GRAFICA DEL METODO DE LINEALIZACION_
49
La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

La aproximacioacuten que se acaba de presentar para una funcioacuten de una I
sola variablepuede extenderse a sistemas con mas de una
variableConsiderese el sistema descrito por las siguientes
ecuaciones
dX1 = f1(X1X2) dt
La expansioacuten de f1 y f2 en series de Taylordespreciando los
teacuterminos de segundo o den en adelante daacute
f1(X1X2)=f1(X10X20)+ ~I (X1-X10)+ --ordfiJ1 (X2-X20) aX11x10X20 aX21x10X20
f2(X1X2)=f2(X10X20)+ af21 (X1-X10)+ af21 (X2-X20) aX11x10X20 aX21x10X20
Si la funcioacuten que se linealiza forma parte middot de un modelo que
describe la dinaacutemica de un proceso continuoel punto mas
conveniente para expandir eacutesta en serie de taylor es el
correspondiente a las condiciones de operacioacuten de estado
estable Hac iendo esto la func ioacuten queda expresada en teacuterminos de
variables de desviacioacuten Si en las uacuteltimas dos ecuaciones se
substi tuyen X10 y X20 por los valores de estado estable X1e y
X2ese obtiene
f1(X1X2)=f1(X1eX2e)+ ~I X~1+ ~I X~2 (32) a X1 X1e X2e aX21 X1e X2e
f2(X1X2)=f2(X1eX2e)+ Jliacute21 X~1+ ~I X~2 (33) aX1 X1eX2e aX2 X1eX2e
En el caso del reactor continuo de tanque agitado analizado en la
unidad 2tanto la ecuaCl0n de balance de material como de
energacontienen el teacutermino KCAAl expresar K en funcioacuten de la
temperatura este teacutermino se convierte en Koe- E RT el cual es no
linealAl linealizarlo se obtiene
e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

e-ERTCA=e-ERTeCAe + j1e-E RTCA)I (T-Te )
aT ITeCAe
+ ----ordf-Le-ERTCA) (CA-CAe) aCA TeCAe
=e-ERTeCAa+(_E_ e-ERTaCAe)T~+e-ERTa(CA~) RT a 2
I
315 RESPUESTA DINAHICA DE SISTEMAS LINEALES DE PRIMER ORDENSi
se tiene en cuenta la clasificacioacuten de los sistemas atendiendo al
ordeacuten de las ecuaciones que describen su dinaacutemica los sistemas de
primer o aeacute son aquellos descritos por ecuaciones diferenciales
de primer o~deacuten
La forma general de las ecuaciones diferenciales ordinarias
lineales de primer or~ es _1~ ~ _~
- _ elt dY + P(t)Y = X(t) (34) ~ - - Liexcliquesttf dt( - iacuteltv
1) -t La solucioacuten general de esta ecuacioacuten se obtiene mediante la
aplicacioacuten de los meacutetodos del p~oducto o de variacioacuten del
paraacutemetro Para el caso particular de las ecuaciones con coefi shy
cientes constantesla forma es
a1dY + aoY = bX(t) (35) dt
- En el ahalisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se lleva a la forma
z gx + 1Y = KpX(t) (36) dt
T Se conoce como la constante de tiempoy Kp como la ganancia de
estado estacionario
A continuacioacuten se analizaran algunos sistemas de prime r orden c on
1 fin de determinar el comportamiento de su respuesta eacutest a
bull t _ 1 ) w
1( shy
51
~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

~ 11
t
obviamente debe de ser de tipo exponenc ialpueacutes la solucioacuten de
toda ecuacioacuten diferencial de primer ordeacute n es de este tipo
El modelo desarrollado en la unidad dos para el reactor continuo
de tanque agitado puede con ciertas restricciones en las
condiciones de operacioacuten simplificarse de forma tal que el
modelo obtenidotenga una solucioacuten mateacutematica r e lativamente
simpleSipor ejemploel volumen de la fase liacutequida se mantiene
constante y el reactor opera isot~rmicamentela dinaacutemica del
sistema queda descrita por la ecuacioacuten de balance de componente
A
dCA + (F + K)CA = F CAO (37) dt V V
En condiciones de estado estacionario
(f + K)CAa = F CAOa (38) V V
Substrayendo la ecuacioacuten (38) de la (37)se obtiene
T dC~A + CJA = KpCJAO (39) dt
T = 1 Constante de tiempo del proceso K+FV
Kp =~ Ganancia de estado estacionario del proceso l+VjF
Ob~vese que la ecuac ioacuten ( 39) es idiquestnt ica a la ( 3 7 ) De aqu
puede concluirse quesiempre y cuandola ecuacioacuten diferencial
ordinaria sea linealla forma de eacutesta es la misma en teacuterminos de
variables totales o de desviacioacuten
La variable de perturbacioacuten en la ecuacioacuten (39)e8 C~Ao Si esta I
concentracioacuten cambia instantaneamente de un valor CAOe a ot r o
CAo~la perturbacioacuten al sistema es de tipo esca l oacuten
-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

-------
I
I 1
tltO C~ AO O
[CAOl - CAOe Co tgtO
La solucioacuten de la ecuacioacuten (39) para tiempos mayores o iguales a
ceroconduce a la siguiente respuesta para el sistema
variable de respuesta se aproxima asintoticamente a un nuevo
(310)
La figura 34 muestra la forma de variacioacuten de la concentracioacuten
de A con el tiempoDe esta figura puede observarse que la
valor de estado estacionario
(311)
------- shy
t
J
FIGURA 34 RESPUESTA DE UN REACTOR CONTINUO DE TANQUK AGITADO A UN CAMBIO ESCALON KM LA CONCKNTRACION DE REACTIVO
La ganancia de estado estacionario es la razoacuten de la magnitud de
cambio entre los valores de estado estacionario (inicial y final)
de la variable de saliday la variable de entrada Este paraacutemetro
determina la maacutexima desviacioacuten de la variable de salidacomo
consecuencia de cambios en una variable de entradaEn el caso de
sistemas lineales puede obtenerse directamente de la ecuacioacuten de
estado estacionarioEn procesos con alta gananciala variable de
salida puede cambiar significativamenteauacuten con pequentildeos cambios
en la entrada (proceso con alta sensibilidad)
El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

El tiempo necesario para que la respuesta (eA) alcance un valor
dete-minado depende fundamentalmente de la constante de tiempo
del procesoEn la ecuacioacuten 310 puede verse que mientras menor
sea el valor de este paraacutemetro maacutes raacutepido cae el teacutermino
exponencial a cero si dos reactores continuos de tanque agitado
operan con la misma ganancia de estado estac ionario (Kl K2= [V2
FlJ[VlF2J pero la constante de tiempo del primer reactor es
menor (KlgtK2) eacuteste reactor alcanzaraacute mas raacutepidamente (en un
menor tiempo) un valor dado de la respuesta Este hecho se ilustra
en la figura 35
11
Primer reactor
Kp CA ----iacute- ----------- shy
FIGURA 3 _ 5 RESPUESTA DE DOS SI STEMAS DE PRIMER ORDEN CON DIFERENTE CONSTANTE DE TIEMPO
Las ecuaciones que describen la dinaacutemica del proceso analizado en
la aplicacioacuten 222 son
F = FA + Fa ( 3 12 )
V dXA + FXA - FA ( 313) dt
Para obtener la solucioacuten de la ecuacioacuten (313) es
necesarioprimero linealizarlaDespueacutes de efectuar esta operacioacuten
y substraer de la ecuacioacuten resultantela correspondiente al
estado estacionario se obtiene
v ~ + F9XA = FA - FXAa (314) dt
54
-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

-_ bull
bull 1Para una perturbacioacuten escaloacuten en la cual FA cambia lnstantashy
neamente de FAe a FA1 y FB permanece constante
( o t lt O FmiddotA =
( FAl - FAe = Lo t gt O
De la ecuacioacuten (312) ss concluye que
(315)
Reemplazando Fmiddot de la ecuacioacuten (315) en la ecuacioacuten (314)
(316)~ dXmiddotA + XmiddotA = (1 Fe dt
T = V Fe Kp = (1 - XAe) Fe
La solucioacuten de la ecuacioacuten (316) es
Las ecuaciones que describen la dinaacutemica del sistema de flujo por
gravedadanalizado en la unidad dosson (para el caso de flujo
turbulento)
Fo - F = A dZ dt
Reemplazando la segunda ecuacioacuten en la primerase obtiene
Fo - K~(Z = A dZ (317) dt
Esta ecuacioacuten es no linealdebido al teacutermino K~(ZSi se hac e la
substitucioacuten u = (Zse obtiene
2A ( udu ) - dt Fa - KfU
Integrando esta ecuacioacuten para el caso en el cual el flujo de
entrada cambia repentinamente de un v a lor de estado estacionario
(Foa) a un valor FOlse llega a
55
Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Ln (Fol Kr(Z) = K~ t + Fo - Kr(Z
Fol Fo 2AFol Fol
La solucioacuten de la ecuacioacuten (317) tambieacuten se puede
obtenerrecurriendo a la linealizacioacuten del teacutermino K~(ZDespueacutes
de linealizar y substraer de la ecuacioacuten resultante la de estado
estacionariose obtiene
A dZmiddot + Kr Zmiddot = Fomiddot (318) dt 2(Z
T = 2A(Z = 2V Kp = 2(Z - 2Z K~ Fe K~ Fe
v es el volumen correspondiente al estado estacionario La
perturbacioacuten se expresa mediante la siguiente funcioacuten escaloacuten
o t lt O Fo = I
]Fol - Fo = Lo t gt O
La solucioacuten de la ecuacioacuten (318) es
8
bull 7 Q
It Solueion I)(oe I o
~ 6 CT ~ Solueion oproll imodoe CI--bull bullc
3~
~
___~____~____~__~____~__~____~__~___1
O ~ 10 I~ 20 2~ 30 3~ 40 Tiempo( min
FIGURA 36 RKSPUKSTA DE UN TANQUK CON FWJO POR GRAVEDAD
56
Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Par f d
--
En l~ figura 36 se grafica tanto la solucioacuten exacta (analiacutetica)
como la aproximada (linealizando) a~plusmnendo los siguientes - shy
valores numericos A = 20 pieaK~ = 10 pie3 minFo = 20
pie3 minFo1 = 25 pie3 minComo puede apreciarsela solucioacuten
lineal izada se aproxima muy bien a la exacta en una reaioacuten
cercana a las condiciones de estado estacionario Sin embargo a
medida que el tiempo transcurrela respuesta del sistema se aleja
de estas condiciones y la aproximacioacuten es cada vez menos
rigurosa
En la figura 37a y 37b se muestran el aacuterea de seccioacuten
transversal y la distribucioacuten general de temperaturas de un
teacutermometro de vidrio con mercurio
d vid r i o
Resist~ncio pelicular
a b
FIGURA 3 7 DISTRIWCION DE TEMPERATURA EN UN TImHOHKTRO DE VIDRIO
Para obtener las ecuaciones que representan la dinaacutemica de este
sistemapueden hacerse las siguientes suposiciones simplifi shy
cantesque conducen a un modelo de simple solucioacuten matemaacutetica
- La resistencia a la transferencia de calor ofrecida por el
vidrio y el mercurio son despreciables comparadas con aqueila
ofrecida por la peliacutecula alrededor del bulbo Esto implica que
la temperatura del mercurio y la pared del vidrio son la misma
- La capacidad caloriacutefica del vidrio esdespreciable
- La temperatura del mercurio es uniforme
- La pared del vidrio que contiene el mercurio no se expande ni
contrae durante la respuesta transitoria
7
rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

rLa aplicacioacuten de un balance de energla al bulbo del teacutermometro
conduce a la siguiente expresioacuten
(mCphoA) (dT-dt) + T- = T-A 1 ( iexcl 1_
I I
m masa de mercurio en el bulbo
Cp Capacidad caloriacutefica del mercurio
A Area del bulbo para transferencia de calor 7
ha Coeficiente pelicular de transferencia de calor 7
I Si el teacutermometro se encuentra inicialmente en equilibrio con el
medio ambiente (TAO) y se introduce en un bantildeo a temperatura
constante (TAl)la perturbacioacute n es
t lt O
To t gt O
( La respuesta del ~eacutermometro es
En el circuito mostrado en la figura 38 se aplicamediante una
fuenteun voltaje v(t) a una combinacioacuten de una resistencia (R) y
una capacitancia (C)
FIGURA 38 CIRCUITO RESISTIVO CAPACITIVO
Aplicando la ley de Kirchhoff al circuito se obtiene
v(t) = Ri(t) + (le)J idt
I 4 58 -iquest ) ~
Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

Reemplazando la corriente por la velocidad de cambio de carga con
respecto al tiempo y teniendo en cuenta que la razoacuten de la carga
a la capacitancia (qC) es el voltaje a traveacutes del capacitorse
obtiene
v(t) = RC( decdt ) + eo
Esta ecuacioacuten en teacuterminos de variables de desviacioacuten es de la
forma
(319)
T = RC
Si el voltaje de la fuente cambia en forma instantanea de su
valor de estado estacionario (Ve) a un valor V1 la perturbacioacuten
es
O t lt O v- =
Ve - V1 = VO t gt O
La solucioacuten de la ecuacioacuten (319) es
En el circuito eleacutectrico que acaba de analizarsela constante de
tiempo del proceso corresponde al producto de la resistencia por
la capacitancia Este resultado puede extenderse a los sistemas
que se presentan en el aacuterea de los procesos quiacutemicos si para
estos se establecenpor analogiacutea con los circuitos eleacutectricossus
respectivas resistencias y capacitancias La capacitancia se
define en general como la razoacuten del cambio de una propiedad
almacenada al cambio en la fuerza impulsora o potencialLa
resistencia se define como la razoacuten de cambio de la fuerza
impulsora al cambio en el flujo
Para el sistema del tanque con flujo por g rave dad se tie ne
R = dZdF
59
- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

- ---------- - - - - ----
Luego R = 2fZeKf C = AdZdZ = A
bull I
En el sistema de mezclado de dos compuestos liacutequidosla constante
de tiempo es
C = VdXAdXA = V T = VFeo
En el caso del termoacutemetro de vidrio se tiene
T = mCphoAR = dT(hoAdT) = lhoA
Los cuatro sistemas hasta aqul analizadospresentan unas caracshy
teristicas dinaacutemicas que son comunes a todos los sistemas de
primer oqiaacute
- Son sistemas autb~egulados
Son sistemas de tipo resistivo-capacitivoes decir tienen
capacidad para almacenar materialenerga o cantidad de
movimientoy siempre existe una resistencia que se opone a un
flujo
~ ~
laquo fshy(f) 50 w gt o 40 (f)
w cr
20
10
6010 2 0 30 4Q 5 0 tI r
FIGURA 39 RESPUESTA PORCENTUAL DE UN SISTEMA DE PRIMER ORDEN A PERTURBACION ESCALON
60
L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

L~ rapidez de la respuesta la determina el valo~ de la
constante de tiempo del sistema Un graacutefico de la spuesta
porcentual contra el tiempo (fig 39)muestra que cuando ha
transcurrido un tiempo igual al valor de la constante de
tiempola respuesta alcanza un 832 de su valor finalCuando
el tiempo transcurrido es igual a cuatro veces la constante de
tiempola respuesta alcanza un 98 de su valor final
- En el caso de los sistemas no lineales la constante de tiempo y
la ganancia de estado estacionario dependen de las condiciones
en este estado
- La maacutexima velocidad de respuesta es la inicial
316 RESPURSTA DINAKICA DE SISTHHAS LINKALKS DE SKGUNDO ORDEN
En esta seccioacuten se analizaraacute la respuesta de sistemas
representados por ecuaciones diferenciales ordinarias lineales de
segundo or( eacute con coeficientes constantes
Como un ejemplo de un sistema de segundo ordeacutenpuede analizarse
el caso del manoacutemetro de tubo en U que se muestra en la figura
310La longitud de la columna de liacutequido es Llnicialmente las
dos ramas del fluido se encuentran en equilibrio siendo Po la
presioacuten aplicada en cada extremo Si en el lado izquierdo se
aplica una presioacuten P1mayor que Pael fluido del lado derecho
ascenderaacutesea X el desplazamiento del fluido en cualquier
instante
NIVEL INICIAL (EQUILIBRIO
FIGURA 3 10 HANOHKTRO KM U
61
01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

01- bull
La ecuacioacuten que describe el comportamiento dinaacutemico del
sistemase puede obtener mediante la aplicacioacuten de un balance de
cantidad de movimiento
Peso de la columna de fluido que se opone al movimiento r=--shy V~
--- --shy 2oacutegAX
r ~ La fuerza de friccioacuten para flujo laminar se obt i ene a prtir de la
ecuacioacuten de Hagen Pousielle
Ff = (32~LAD2)v v Velocidad de desplazamiento del fluido
A Area de seccioacuten transversal del tubo
~ Viscosidad del fluido
Variacioacuten de cantidad de movimiento d(oacuteALvdt
Fuerza debida a la diferencia de presioacuten aplicada
(P1 - Po)A = AL~P
Organizando los anteriores teacuterminos se obtiene
L d 2 X + 16~L dX + X =ill (3 20 ) 2g dt2 oacutegD2 dt 25 g
f IEn el analisis de la dinaacutemica y control de procesosesta ecuacioacuten
usualmente se emplea en la forma
T2 d 2 X + 2~TdX + X = KpQ(t) ( 3 21) dt2 dt
Para el caso en consideracioacuten
T = (L2g) Constante de tiempo
~ - (8~L5gDZ )(2gL) Coeficiente de amortiguamiento
Kp = 1(25g) Ganancia de est ado estacionario
Q(t) = ~p = constante Perturbacioacuten
Para una perturbacioacuten escaloacuten unitariala ecuacioacuten (321) en
teacuterminos de variables de desviacioacutenes de la forma
T2 d 2 Xmiddot + 2~TdXmiddot + Xmiddot = Kp (322) dt 2 dt
62
La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3

La solucioacuten general de esta ecuacioacuten consta de una soluc ioacuten
complementaria y una particular La primera solucioacuten depende de
las ra-ces de la ecuacioacuten caracteristica
Las ralces de eacutesta ecuacioacuten son
Como se veraacuteestas raiacuteces son de gran importancia para el
analisis dinaacutemico de un proceso de segundo ordeacutenpueacutes e llas
indican si su respuesta es raacutepida o lentaestable o inestableosshy
cilatoria o no oscilatoria
Si 0 es mayor que 1 la cantidad dentro del radical es positiva y
las ralces son reales y diferentesEn este caso la solucioacuten de la
ecuacioacuten (322) es
X- = Kp[l-e-BtT(cosh et + ~ senh et )] (3 23) T e T
e = (02 - 1)12
En la figura 311 se grafica X-Kp contra tT para varios valores
de 0 Esta respuesta se denomina sobreamortiguada y su comportashy
miento se asemeja un poco al de la respuesta de los sistemas de
primer ordeacuten perturbados con una funcioacuten escaloacuten Sin embargo al
comparar las curvas de la figura 311 con las de un sistema de
primer ordeacuten se observa que la respuesta sobreamortiguada tiene
un atraso inicialsiendo por tanto mas lenta
Si ~ es igual a unoel teacutermino dentro del radical se hace igual a
cerodando raices iguales y realesEn este casola solucioacuten
general de la ecuacioacuten diferencial es
X- = Kp [l - (1 + t)e- t T ] ( 324 ) T
8 3