Supongamos que tenemos “n” destinos o centros de · PDF fileMétodos de Toma...
51
Santiago Contreras Aranda VI. ESTRUCTURA Y SOLUCIÓN DE UN MODELO PARA EL SISTEMA DE TRANSPORTE, ASIGNACIÓN Y TRANSBORDO 6.1. Estructura Del modelo de transporte En esta oportunidad analizaremos la estructura de tres tipos de modelos el modelo de transporte, el modelo de Asignación y el modelo de Transbordo, tres tipos de modelos que son tratados con Programación Lineal y usar el Método Simplex para solucionarlos, destacando que existen algoritmos especializados para cada tipo de modelo y que en realidad son más efectivos. En general los tres modelos tienen que ver con la determinación una planificación estratégica de costo mínimo, para el transporte de mercaderías de un conjunto de puntos que pueden ser considerados como bodegas o almacenes, si meditamos un poco podemos afirmar que se puede extender a control de Inventarios estructuras que serán vistas posteriormente. Como se mencionó al inicio de este ítem el modelo de transporte puede ser solucionado por el algoritmo Simplex, pero existen técnicas para solucionar este tipo de problemas que recalcamos son más eficaces en términos d cálculo. Presentaremos la forma estándar del modelo de transporte, posteriormente describimos sus variantes. Supongamos que tenemos “n” destinos o centros de consumo y “m” centros fuentes u orígenes, debemos tener en cuenta que las fuentes de abastecimiento, origen, u oferta, las llegadas o destinos o demanda serán representados por círculos, Consideremos ij c = costo unitario de transportar entre el origen i a un destino j ij x = Cantidad transportada desde el origen i al destino j UNIDAD VI 1 2 3 : : m Unidad de demanda 1 2 : : m Unidad de Oferta a 2 a 1 a m b 1 b 2 bn
Transcript of Supongamos que tenemos “n” destinos o centros de · PDF fileMétodos de Toma...

Métodos de Toma de Decisiones
Santiago Contreras Aranda
210
VI. ESTRUCTURA Y SOLUCIÓN DE UN MODELO PARA EL SISTEMA DETRANSPORTE, ASIGNACIÓN Y TRANSBORDO6.1. Estructura Del modelo de transporte
En esta oportunidad analizaremos la estructura de tres tipos de modelos el modelo detransporte, el modelo de Asignación y el modelo de Transbordo, tres tipos de modelos que sontratados con Programación Lineal y usar el Método Simplex para solucionarlos, destacandoque existen algoritmos especializados para cada tipo de modelo y que en realidad son másefectivos.
En general los tres modelos tienen que ver con la determinación una planificaciónestratégica de costo mínimo, para el transporte de mercaderías de un conjunto de puntos quepueden ser considerados como bodegas o almacenes, si meditamos un poco podemos afirmarque se puede extender a control de Inventarios estructuras que serán vistas posteriormente.Como se mencionó al inicio de este ítem el modelo de transporte puede ser solucionado por
el algoritmo Simplex, pero existen técnicas para solucionar este tipo de problemas querecalcamos son más eficaces en términos d cálculo.
Presentaremos la forma estándar del modelo de transporte, posteriormentedescribimos sus variantes.Supongamos que tenemos “n” destinos o centros de consumo y “m” centros fuentes uorígenes, debemos tener en cuenta que las fuentes de abastecimiento, origen, u oferta, lasllegadas o destinos o demanda serán representados por círculos,
Consideremos
ijc = costo unitario de transportar entre el origen i a un destino j
ijx = Cantidad transportada desde el origen i al destino j
UNIDAD VI
1
2
3
::
m
Unidad dedemanda
1
2
3
::
m
Unidad deOferta
a2
a1
a m
b1
b2
bn

Métodos de Toma de Decisiones
Santiago Contreras Aranda
211
Entonces el modelo general de Transporte en Programación Lineal es:
n1,2,...,jm;1,2,...,i,x
n1,2,...,j,x
m1,2,...,i,x
a
:min
ji
m
1i ji
n
1j ji
1 1
o
b
a
sujeto
xcz
j
i
m
i
n
j ijij
Debemos resaltar que las primeras “m” restricciones nos dice que la suma de los envíosdesde una fuente es menor o igual que su oferta.
Las restantes “n”restricciones nos dice que la cantidad recibida por el destino j de todos losposibles orígenes es igual o mayor que la cantidad requerida.
Pero tenemos otra versión del modelo que se conoce modelo de transporte en equilibrio
n1,2,...,jm;1,2,...,i,x
n1,2,...,j,x
m1,2,...,i,x
a
:min
ji
m
1i ji
n
1j ji
1 1
o
b
a
sujeto
xcz
j
i
m
i
n
j ijij
6.2. Ejemplos de aplicación del modelo de Transporte
1. Una empresa produce un producto en cuarto ciudad, Lima (L); Chimbote (C) Trujillo (T) yArequipa (A), dicha producción se destina a tres centros de consumo I, II, y III. Se sabe quelos centros productores disponen de 60, 80, 50, y 30, unidades de productos respectivamente;y los centros de consumo necesitan 70, 80 y 70 respectivamente. El costo unitario detransporte en soles es:

Métodos de Toma de Decisiones
Santiago Contreras Aranda
212
Centrosproductores
Centros de consumoI II III
Lima (L) 5 6 8Chimbote (C) 4 8 12Trujillo (T) 12 No existe carretera 10
Arequipa (A) 3 6 9
Se pide formular un modelo de transporte para determinar un programa que minimice elcosto total de transporte entre los cuatro centros productores y los tres centros de consumo.
Solución
III.II;I;jA;T,C,L,ipara0;x
70 x
80 x
70 x
30
50
80
60
:aSujeto
9631012x
1284865:min
ji
AIII
AII
AI
TI
1
TIIICIIILIII
TIICIILII
TICILI
AIIIAIIAI
TIIITIITI
CIIICIICI
LIIILIILI
AIIIAIIAITIIITII
CIIICIICILIIILIIL
xxx
xxx
xxx
xxx
xxx
xxx
xxx
xxxXMx
xxxxxxZ
Es necesario observar que estamos utilizando el número M para poder decir que no existecamino pues este número es tan grande como fuera posible.El modelo anterior es de equilibrio puesto que la demanda es igual a la oferta.
2. Supongamos que la empresa anterior solo tiene dos centros de consumo con 90 y 100capacidad de consumo, y se pide estructurar un modelo también que minimice los costostotales del transporte.Solución

Métodos de Toma de Decisiones
Santiago Contreras Aranda
213
En este caso se observa que la oferta es mayor que la demanda, entonces en estos casos se creauna centro de consumo ficticio III el modelo quedará así,
III.II;I;jA;T,C,L,ipara0;x
30 x
100 x
90 x
30
50
80
60
:aSujeto
6312x
8465:min
ji
AIII
AII
AI
TI
1
TIIICIIILIII
TIICIILII
TICILI
AIIAI
TIITI
CIICI
LIILI
AIIAITII
CIICILIIL
xxx
xxx
xxx
xx
xx
xx
xx
xxMx
xxxxZ
El centro de consumo ficticio tiene una demanda igual a la diferencia de la oferta menos lademanda.Debemos destacar que el mismo camino se sigue en el caso que la oferta sea menor que lademanda, es decir en este caso se crea un centro de abastecimiento ficticio con la diferenciaentre la demanda y la oferta.
6.3. METODOLOGÍA PARA SOLUCIONAR UN MODELO DE TRANSPORTE
En esta oportunidad presentaremos la manera como se soluciona un problema detransporte, como ya mencionamos la metodología aplica los pasos del método Simplex, sudiferencia radica solo en los detalles y las condiciones de Optimalidad y factibilidad.
Metodología
Primero: Determinar la solución básica factible sbf
Segundo: Determinar las variables que entran y que son elegidas del conjunto de variables nobásicas, Si todas las variables satisfacen las condiciones de Optimalidad del método Simplexentonces deténgase ya encontró una solución optima, caso contrario continuar al pasosiguiente.
Tercero: Determine las variables que salen usando las condiciones de factibilidad de lasvariables de la solución básica actual, luego obtenga la nueva solución básica y regresar alpaso dos.
DETERMINACIÓN DE LA SOLUCIÓN BÁSICA FACTIBLE INICIAL

Métodos de Toma de Decisiones
Santiago Contreras Aranda
214
En primer lugar debemos resaltar que cuando se considera la demanda igual a la oferta es
decir
n
jj
m
ii ba
1
se origina en el modelo de transporte una ecuación dependiente lo que
significa que mencionado modelo tiene m + n-1 ecuaciones independientes, consecuentementeel una solución básica factible inicial debe de incluir n + m -1 variables básicas.
Una solución del modelo de transporte debe de satisfacer los siguientes requerimientos:
a) Ser factible, esto es satisfacer todas las restricciones del modelob) Contener m + n -1 variables básicasc) No formar en el cuadro solución, circuito cerrado con sus variable básicas
Método de la Esquina Noroeste
Pasos:
Primero: Iniciar por la celda superior izquierda.
Segundo. Coloque en dicha celda un valor máximo posible permitido por la oferta o lademanda correspondiente.
Tercero: actualice los valores de la oferta y la demanda que fueron modificados en el paso (2).
Cuarto: siga a la celda derecha si existiera alguna oferta restante o regrese al paso (2), casocontrario siga para la celda inferior y regrese al paso (2)La regla termina cuando la celda inferior derecha del cuadro es alcanzada.
Ejemplo. Consideremos el siguiente cuadro de costos de un modelo de transportes:
1 2 3 4 Oferta1 10 7 6 5 92 2 8 9 4 103 11 12 8 4 8Demanda 7 6 10 4
SoluciónPrimero debemos de observar si se cumple el equilibrio del modelo de transporte en nuestrocaso la demanda suma 27 y la oferta también 27. Entonces debemos de aplicar el método.
a) Iniciamos con la celda (1,1) y le asignamos 7 valor que permite la demanda y luegoactualizamos la oferta es decir lo restamos la demanda, 9 - 7 = 2b) Seguir para la celda (1,2) y le asignamos el valor máximo permisible en este caso es 2, yactualizamos la demanda 6 - 2 = 4c) continuar hasta alcanzar la celda inferior derecha del cuadro de soluciones

Métodos de Toma de Decisiones
Santiago Contreras Aranda
215
1 2 3 4 Oferta1 7 2 9 , 22 4 6 10 , 63 4 4 8Demanda 7 6 4 10 , 4 4
Luego entonces tenemos la solución básica factible: X11 = 7; X12 = 2 ; X22 = 4; X23 = 6; X33 = 4 ;X34 = 4; . Las otras variables que no están consideradas en la solución son las llamadasvariables no básicas es decir: X13; X14 ; X21 ; X24, ; X31 ; X32 .
Debemos destacar que la solución básica factible inicial es obtenido sin considerar los costosdel modelo solo se consideran la demanda y las oferta.
Método del Costo MínimoDebemos resaltar que este procedimiento proporciona la solución básica factible inicial la cualla determina considerando además de las ofertas y demandas, el costo de transporte ,fenómeno que no considera la metodología anterior, lo que le permite determinar unasolución más próxima a al realidad que la solución de Cantor Noroeste.
PROCEDIMIENTO
Primero. Localizar en el cuadro el menor costo que no tenga demanda u oferta nula.
Segunda. Coloque en la celda correspondiente del cuadro la solución la mayor cantidadpermitida por la oferta y la demanda.
Tercero. Actualice los valores modificados de la demanda y oferta en el paso dos y regrese alpaso 1.
El método continúa hasta que se agote todas las ofertas proporcionadas por los orígenes ytodas las demandas permitidas por los destinos
Ejemplo Consideremos el mismo ejemplo anterior.
1 2 3 4 Oferta1 10 7 6 5 92 2 8 9 4 103 11 12 8 4 8Demanda 7 6 10 4
Cuadro de costos

Métodos de Toma de Decisiones
Santiago Contreras Aranda
216
a) Seleccionamos la celda ( 2,1) , luego a esta celda se le atribuye el valor de 7 que es lademanda de origen dos y destino dos reduciendo la oferta a 3 unidades.
b)
1 2 3 4 Oferta1 9 9,2 7 3 10,33 4 8 ,4Demanda 7 6 ,3 10, 1 4
Ejemplo 2.
1 2 3 4 Oferta1 10 7 6 5 92 6 8 9 1 103 11 12 8 4 8Demanda 7 6 10 4
Cuadro de costos
Solución1 2 3 4 Oferta
1 9 9 ,2 6 4 10 ,63 1 6 1 8Demanda 7 ,1 6 10,1 4
DETERMINACIÓN DE LAS VARIABLES NO BÁSICAS QUE ENTRAN A LASOLUCIÓN BÁSICA.
Para determinar las variables no básicas que deben de ingresar a la base deben de cumplircon las condiciones de Optimalidad del método simplex.Conocida la solución básica inicial, se debe de escribir la función objetivo solamente enfunción de las variables no básicas, con la finalidad de saber si la presente solución ya esóptima. En el caso que no lo sea, es necesario determinarlas variables que entran y salen de labase, con la finalidad de obtener una nueva solución básico compatible.
MÉTODO DE MULTIPLICADORES ui vj
Este método consiste en asociar ui , y vj con los i renglones y las j columnas de la tabla detransporte para cada variable básica Xij, de la solución actual los multiplicadores deben desatisfacer la relación siguiente:

Métodos de Toma de Decisiones
Santiago Contreras Aranda
217
ijjicvu para cada variable básica, para solucionarlo podemos considerar un
valor arbitrario que cumpla la primera relación y a partir de ello podemos determinar losdemás.
Lo que permite decir que la evaluación de cada variable no básica Xpq esta dada por losiguiente:
pqXbásicano variablecadapara,
pqqppqcvuc
Luego seleccionamos la variable que entraVeamos el último ejemplo 2.
8:
12:
11:
1:
2:
6:
3333
2332
1331
4224
2221
3113
vuXbásicaVariable
vuXbásicaVariable
vuXbásicaVariable
vuXbásicaVariable
vuXbásicaVariable
vuXbásicaVariable
Si en la primera relación hacemos u1 = 0 ; los demás valore se tienen:V3 = 6; V2 = 10; u2= -7, V1 = 9; V4 = 8; u3 =2., determinados los valores de las ui y vj ahora sepuede obtener la función objetivo en función de las variables no básicas utilizando lasiguiente relación
n
j jj
m
i
n
j
m
i iiijjiijbvauxvucZ
11 1 1
Pero observamos que basta calcularjiij
vuc para cada variable no básica y obtener
los dos últimos sumatorias de la expresión:
215)4)(8()10)(6()6)(10()7)(9(
54)8)(2()10)(7()9)(0(4
1
3
1
j jj
i ii
bv
au
Determinando los coeficientes para las variables no básicasCoeficiente Xij: cij –ui –vj = 0Coeficiente X11: 10 - 9 = 1Coeficiente X12: 7 -10 = - 3Coeficiente X14: 5 - 8 = - 3Coeficiente X22: 8 – (-7) -10 = 5

Métodos de Toma de Decisiones
Santiago Contreras Aranda
218
Coeficiente X23: 9 – (-7) -6 = 10Coeficiente X34: 4 – 2 - 8 = -6Finalmente obtenemos la función objetivo de la siguiente manera:
Z = 161 + X11 – 3 X12 – 3X14 + 5X22 +10X23 – 6 X34
Recordemos que en el modelo de transporte la función objetivo debe de ser minimizada,entonces la solución aún no fue alcanzada, pues los coeficientes de las variables X12; X14; X34
son negativos y al ingresar a la base deben de disminuir al valor actual de la función objetivo.
Entonces la variable que debe de entrar en la nueva base es X34 por el hecho de presentar elmenor coeficiente negativo (-6).
Debemos destacar que todo lo realizado algebraicamente se puede ejecutar con mayorrapidez usando los cuadros de costos y soluciones de la siguiente manera,
1 2 3 4 Oferta1 10
17
-36
o5
-39 ; u1 = 0
2 2o
85
910
1o
10 ; u2 = -7
3 11o
12o
8o
4-6
8 , u3 = 2
Demanda 7 6 10 4v1 = 9 V2 = 10 V3 = 6 V4 = 8
Cuadro de costos
1 2 3 4 Oferta1 9 9
2 6 + 4 + 10
3 1- 6 1 + 8
Demanda 7 6 10 4
Cuadro Solución
Observemos el cuadro de costos:

Métodos de Toma de Decisiones
Santiago Contreras Aranda
219
a) los valores de Cij - ui -vj en las celdas de las variables básicas fueron representadas por o,que simboliza los valores nulos.
b) los valores de ui y de vj calculados para anular los coeficientes de las variables básicas,son fácilmente determinados. Atribúyase por ejemplo a u1 = 0 lo que permite determinar v3
= 6, pues en la celda (1,3) marcada por (o) en necesario tener c13 –u1 –v3 = 0 , de la mismamanera conocido v3 =6 se determina en seguida el valor de u3 =2 de la misma maneraobtenemos todos los valores de ui y vj .
c) La determinación de los coeficientes de las variables no básicas es facilitada .
d) Los valores de
4
1
3
1;
j jji iibvau se pueden obtener sin dificultad.
Determinación de la variable que sale de la BaseEn esta oportunidad recordemos que hace el método simplex , debe de salir de la base lavariable que se anulara más rápidamente cuando la variable que entra aumentara de valor .En realidad esto puede ser realizado en cuadros que veremos a seguir.
Metodología
a) Imaginar que la variable X34 ingresa a la base con un valor 0 y que debe de ser elmayor posible.
b) Sumar y restar a los valores de ciertas variables básicas de tal modo que se cierre uncircuito que garantice la compatibilidad de la nueva solución.
c) Determinar el mayor valor permitido demáx.
llamado , esto es el valor de tita que
genera la variable básica que se anula más rápidamente.
101X
4.04
6
31
24
21
X
X
De donde podemos tomar 1máx. y X31 es la variable que sale de la base por ser la variable
que más rápidamente se anula, observemos que las demás variables no se altearan con elingreso de la variable X34
Después de determinar la variable que debe de ingresar X34 y la variable que sale de la baseX31 los nuevos cuadros de soluciones y costos quedarán de la siguiente manera
Métodos de Toma de Decisiones
Santiago Contreras Aranda
220
1 2 3 4 Oferta1 10 7 6
o5
-39 ; u1 = 0
2 2o
8 9 1o
10 ; u2 = -7
3 11 12o
8o
4o
8 , u3 = 2
Demanda 7 6 10 4v1 = 9 V2 = 10 V3 = 6 V4 = 8
Cuadro de costos
1 2 3 4 Oferta1 9 92 7 3 103 6 1 1 8Demanda 7 6 10 4
Cuadro Solución
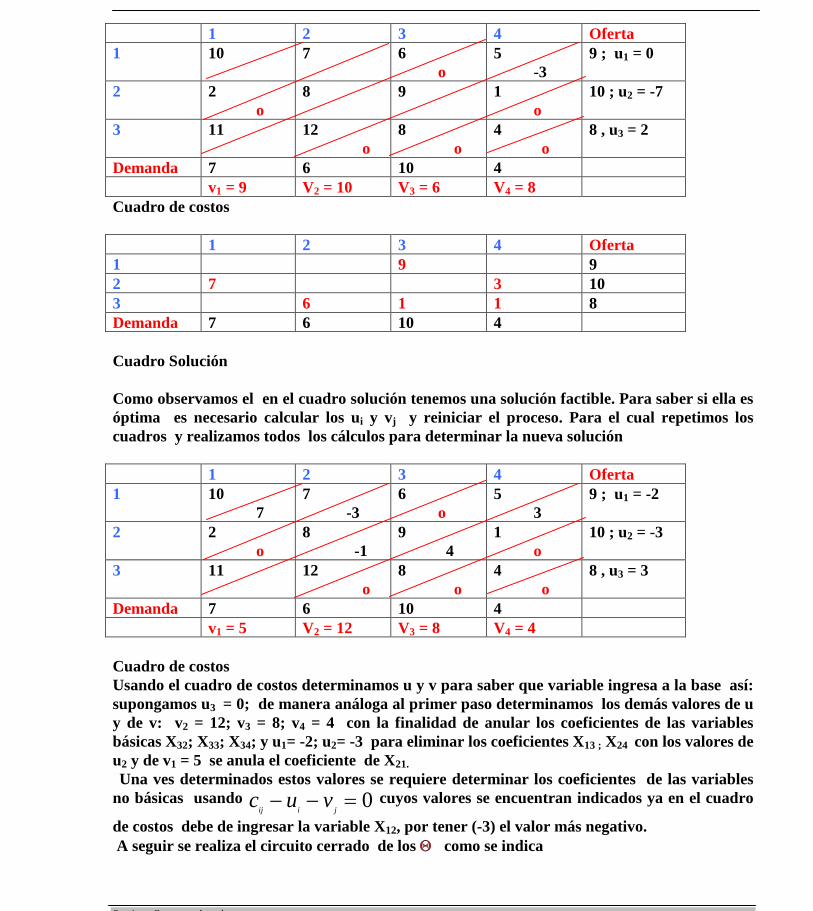
Como observamos el en el cuadro solución tenemos una solución factible. Para saber si ella esóptima es necesario calcular los ui y vj y reiniciar el proceso. Para el cual repetimos loscuadros y realizamos todos los cálculos para determinar la nueva solución
1 2 3 4 Oferta1 10
77
-36
o5
39 ; u1 = -2
2 2o
8-1
94
1o
10 ; u2 = -3
3 11 12o
8o
4o
8 , u3 = 3
Demanda 7 6 10 4v1 = 5 V2 = 12 V3 = 8 V4 = 4
Cuadro de costosUsando el cuadro de costos determinamos u y v para saber que variable ingresa a la base así:supongamos u3 = 0; de manera análoga al primer paso determinamos los demás valores de uy de v: v2 = 12; v3 = 8; v4 = 4 con la finalidad de anular los coeficientes de las variablesbásicas X32; X33; X34; y u1= -2; u2= -3 para eliminar los coeficientes X13 ; X24 con los valores deu2 y de v1 = 5 se anula el coeficiente de X21.
Una ves determinados estos valores se requiere determinar los coeficientes de las variablesno básicas usando 0
jiijvuc cuyos valores se encuentran indicados ya en el cuadro
de costos debe de ingresar la variable X12, por tener (-3) el valor más negativo.A seguir se realiza el circuito cerrado de los como se indica

Métodos de Toma de Decisiones
Santiago Contreras Aranda
221
a) Imaginar que la variable X12 ingresa a la base con un valor 0 y que debe de ser elmayor posible.
b) Sumar y restar a los valores de ciertas variables básicas de tal modo que se cierre uncircuito que garantice la compatibilidad de la nueva solución.
c) Determinar el mayor valor permitido demáx.
llamado , esto es el valor de tita que
genera la variable básica que se anula más rápidamente.
1 2 3 4 Oferta1 + 9 - 9
2 7 3 10
3 6 - 1 + 1 8
Demanda 7 6 10 4
01X
6.06
99
331
32
13
X
X
De donde podemos tomar 6máx. y X13 es la variable que sale de la base por ser la
variable que más rápidamente se anula, observemos que las demás variables no se altearancon el ingreso de la variable X12
Lo que implica los nuevos cuadros
1 2 3 4 Oferta1 10
77
o6
o5
39 ; u1 = 0
2 2o
82
94
1o
10 ; u2 = -1
3 116
123
8o
4o
8 , u3 = 2
Demanda 7 6 10 4v1 = 3 V2 = 7 V3 = 6 V4 = 2
Cuadro de costos
1 2 3 4 Oferta1 6 3 92 7 3 103 7 1 8Demanda 7 6 10 4

Métodos de Toma de Decisiones
Santiago Contreras Aranda
222
Del último cuadro de de costos se concluye que la presente solución es optima pues loscoeficientes de las variables no básicas 0
jiijvuc son todos positivos teniéndose la
variables básicas siguientes:
;1;7;7;3;3;6 *
34
*
21
*
33
*
13
*
24
*
12 XXXXXX
y todas las variables no básicas son ceros
131)4)(2()10)(6()6)(7()7)(3(
6)8)(2()10)(1()9)(0(4
1
3
1
j jj
i ii
bv
au
Llagándose a la siguiente función objetivo:
Z = 137 +7 X11 + 3 X14 +2X22 +4X23 +6X21 +3 X32 = 137 es el valor óptimo pues todas lasvariables son nulas por ser no básicas. Pero debemos resaltar que otra manera de encontrarel valor optimo de la función objetivo es:
137)1(11)7(8)3(1)7(2)3(6)6(73
1
4
1
* i j ijij
XCZ
6.4. ESTRUCTURA Y COSNTRUCCIÓN DEL MODELO DE ASIGNACIÓN
Supongamos que en el modelo de transporte consideramos las siguientes restricciones:1. El número de orígenes = al número de destinos es decir (m = n);2. Capacidad de cada origen = 1 es decir ai = 1 para todo i.3. La demanda de cada destino = 1 es decir bj = 1 para todo j.
Lo que permite reestructurar el modelo de transporte de la siguiente manera:
n1,2,...,jn;1,2,...,i,x
n1,2,...,j,1x
n1,2,...,i,1x
a
:min
ji
m
1i ji
n
1j ji
1 1
o
sujeto
xcz m
i
n
j ijij
Se observa que solamente cada origen i solo abastecerá a un destino j, lo que quiere decir quelas restricciones del modelos ahora serán equivalentes a lo siguientes
contrariocaso,0
jdestinoelabastecerparadesignaleseiorigenalsi,1ijX

Métodos de Toma de Decisiones
Santiago Contreras Aranda
223
El problema entonces resulta determinar como las asignaciones deben de ser hechas de tal maneraque se minimice el costo total.
En realidad el modelo de transporte por las características especiales admite un algoritmo especialpara obtener su solución óptima.El modelo de asignación es un caso especial del modelo de transporte, entonces admite unalgoritmo especial. Pues veamos lo siguiente,
DESTINOSORIGEN
1 2 …….. N1 C11 C12 …. C1n
2 C21 C22 ….. C2n
…N Cn1 Cn2 ……. Cnn
Es necesario tener en consideración que los problemas de asignación ocurren cuando se tienenque distribuir una cantidad determinada de ítems como hombres, máquinas, etc. a una cantidadigual de localizaciones tales como tarifas locales etc.
Por ejemplo el jefe de un departamento quiere saber como debe de distribuir cinco supervisoresen sus cinco divisiones de tal manera que la eficiencia de su departamento sea la máxima por estarazón es que se acostumbra de hablar de matriz de eficiencia al problema de asignación.
Debemos destacar la existencia de un teorema que afirma: Si adicionamos una constante a cadaelemento de una línea o columna de la matriz de eficiencia de un problema de asignación, lasolución óptima de la matriz alterada será también la solución de la matriz inicial
Consecuentemente el proceso consistirá en obtener una matriz de eficiencia alterada que seaequivalente a la original, y que no tenga ningún elemento negativo y presentando el mayor númeroposible de elementos nulos de manera que el la solución óptima presente el valor de:
n
i i
n
i iij
n
i
n
j ijkkzkxcZ
111 1
Destaquemos que la relación anterior nos induce a decir que el valor absoluto de Z*
Es igual a suma de las constantes que fueron utilizadas en la transformación de la matriz deeficiencia.
Ejemplos como asignar hombres y tareas
Supongamos que estamos interesados en asignar 4 operarios a 4 tareas de tal manera que elnúmero de hombre – hora sea mínimo. Si cada hombre realiza cada tarea en un determinadonúmero de horas como se indica la siguiente matriz,

Métodos de Toma de Decisiones
Santiago Contreras Aranda
224
O P E R A R I O S Menor elemento de cada filaTAREAS
I II III IVA 5 24 13 7 (5)B 10 25 3 23 (3)C 28 9 8 5 (5)D 10 17 15 3 (3)
Como al modificar la matriz no se puede colocar elementos negativos es necesario determinar losmenores elementos de cada línea indicados en la fila de la matriz de eficiencia y luego restarlos detodos los elementos de cada línea y luego tenemos:
O P E R A R I O STAREAS
I II III IVA 0 19 8 2B 7 22 0 20C 23 4 3 2D 7 14 12 0
(4)
De igual manera realizamos con las columnas
O P E R A R I O STAREAS
I II III IVA 0 15 8 2B 7 18 0 20C 23 0 3 2D 7 10 12 0
(4)
Luego se puede realizar la asignación óptima de la siguiente manera:Hombre Tarea
I AII CIII BIV D
El tiempo total que se debe de gastar es determinado por la matriz de eficiencia inicial , sumandolos tiempos que cada hombre gasta en su tarea.
Métodos de Toma de Decisiones
Santiago Contreras Aranda
225
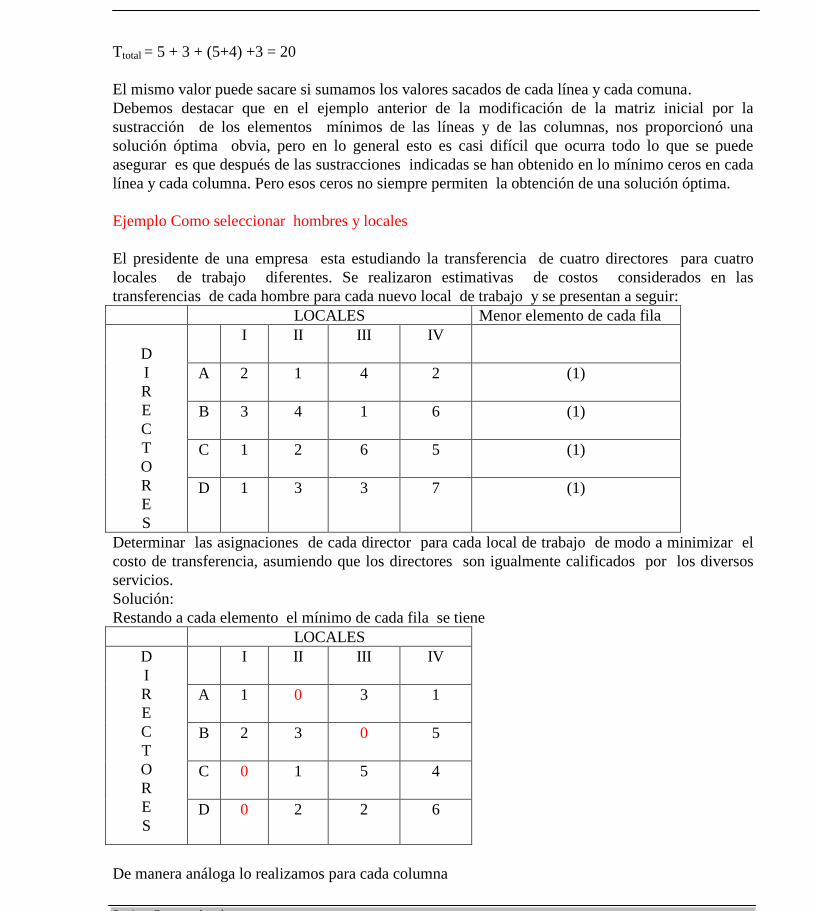
Ttotal = 5 + 3 + (5+4) +3 = 20
El mismo valor puede sacare si sumamos los valores sacados de cada línea y cada comuna.Debemos destacar que en el ejemplo anterior de la modificación de la matriz inicial por lasustracción de los elementos mínimos de las líneas y de las columnas, nos proporcionó unasolución óptima obvia, pero en lo general esto es casi difícil que ocurra todo lo que se puedeasegurar es que después de las sustracciones indicadas se han obtenido en lo mínimo ceros en cadalínea y cada columna. Pero esos ceros no siempre permiten la obtención de una solución óptima.
Ejemplo Como seleccionar hombres y locales
El presidente de una empresa esta estudiando la transferencia de cuatro directores para cuatrolocales de trabajo diferentes. Se realizaron estimativas de costos considerados en lastransferencias de cada hombre para cada nuevo local de trabajo y se presentan a seguir:
LOCALES Menor elemento de cada fila
DIRECTORES
I II III IV
A 2 1 4 2 (1)
B 3 4 1 6 (1)
C 1 2 6 5 (1)
D 1 3 3 7 (1)
Determinar las asignaciones de cada director para cada local de trabajo de modo a minimizar elcosto de transferencia, asumiendo que los directores son igualmente calificados por los diversosservicios.Solución:Restando a cada elemento el mínimo de cada fila se tiene
LOCALESDIRECTORES
I II III IV
A 1 0 3 1
B 2 3 0 5
C 0 1 5 4
D 0 2 2 6
De manera análoga lo realizamos para cada columna

Métodos de Toma de Decisiones
Santiago Contreras Aranda
226
LOCALESDIRECTORES
I II III IV
A 1 0 3
B 2 3 0 4
C 0 1 5 3
D 2 2 5
(0) (0) (0) (1)
El paso siguiente es asignar los directores a los locales para obtener la solución óptima pero nosencontramos con dos dificultades fundamentales:Para el director A se le puede asignar los locales II y IV se alije arbitrariamentePara el director B se le asigna el local III no existe problemaPara el director C se le asigna el local II pero es necesario observar que también puede ser asignadoel director D se selecciona arbitrariamente y se elimina el otro cero.Para el director D no quedo ningún cero en la matriz final lo que indica que la asignación no esóptima.
Entonces surge la siguiente pregunta que hacer para obtener nuevos ceros en la matriz final. Paraesto es necesario cubrir todos los ceros de la matriz final con el menor número posible de rectas ennuestro caso será:
LOCALESDIRECTORES
I II III IV
A 1 0 3 0
B 2 3 0 4
C 0 1 5 3
D 0 2 2 5
Observamos que el menor costo no cubierto es (1) que corresponde a la celda (C,II) de la últimamatriz y si restamos ese costo a cada uno de los elementos de la matriz obtendremos un nuevo ceroen dicha celda pero sin embargo aparecerán costos negativos en todas las celdas que tengan ceroscubiertos por las rectas es decir:
X
X

Métodos de Toma de Decisiones
Santiago Contreras Aranda
227
LOCALESDIRECTORES
I II III IV
A 0 -1 2 -1
B 1 2 -1 3
C -1 0 4 2
D -1 1 1 4
Pero la matriz final no puede presentar elementos negativos es necesario sumar uno (1) a las líneaso columnas cubiertas por las rectas, con la finalidad de restaurar los ceros que fueron destruidos porla operación anterior
LOCALESDIRECTORES
I II III IV
A 2 3 0
B 3 3 0 4
C 0 4 2
D 0 1 1 4
El proceso de las dos operaciones es lo siguiente:i. restar el menor costo (1) de las celdas no cubiertas por las rectasii. sumar este valor a los costos de las celdas que se encuentran en las intersecciones de las
rectas es decir a las celdas (A, I) y (B,I)Finalmente se pasa a asignar los directores a los locales con ceros obteniendo de esta manera unasolución óptima.
DIRECTOR LOCALESA IVB IIIC IID I
X
X

Métodos de Toma de Decisiones
Santiago Contreras Aranda
228
6.5. ALGORITMO PARA UN MODELO DE ASIGNACIÓNTodas las operaciones se realizan teniendo la matriz de eficiencia.Primero. Restar el elemento mínimo de cada línea a todos los elementos de de aquella línea y hacerlo mismo con las columnas.Segundo. Analizar las columnas y líneas de manera secuencial, para cada una con un ceroexactamente y reservar esa posición para una asignación y eliminar los otros ceros de lascolumnas y filas, en caso de empate elegir cualquier cero. Repetir el proceso para todas las líneas ycolumnas sin posición reservada. Si las posiciones reservadas completan las asignacionesentonces la solución es óptima, caso contrario ir al siguiente paso.
Tercero. Trazar un número mínimo de rectas para cubrir todos los ceros de la siguiente manerai. Marcar todas las líneas que no tengan asignaciónii. Marcar todas la columnas que no tengan ceros en líneas no marcadasiii. Marcar todas las líneas que tengan asignación en columnas marcadasiv. Repetir los pasos i y iii hasta no ser posible marcar líneas o columnasv. Trazar un recta sobre cada línea no marcada y sobre cada columna marcadavi. Analizar todos los elementos no cubiertos por una recta, seleccionar el elemento mínimo
de todos ellos y restarlo de todos esos elementos no cubiertos por una recta. Y sumarese elemento mínimo a cada elemento situado en la intersección de dos rectas yregresar al segundo paso.
Ejemplo General
Una empresa cuenta con cuatro locales I, II, III, IV, para ubicar tres máquinas nuevas A, B, C ,sin embargo el cuarto local no puede permitir la ubicación de la maquina A por restriccionesfísicas, el costo de ubicación para cada máquina con respecto a las posiciones es dado a seguir
I II III IVA 5 1 3 XB 3 1 4 3C 3 3 4 2
Se pide minimizar el costo total de asignación de las nuevas máquinas.
Solución
Primero debemos realizar las siguientes algunas observaciones antes de usar el algoritmo deasignación, tales como:
i. Atribuir un costo un costo muy elevado o penalizar con M a la posición (A, IV) con lafinalidad de evitar la asignación de la máquina tipo A al cuatro local.
ii. Crear una máquina ficticia D con costos nulos, la finalidad de igualar el número delocales disponibles.

Métodos de Toma de Decisiones
Santiago Contreras Aranda
229
I II III IVA 5 1 3 MB 3 1 4 3C 3 3 4 2D 0 0 0 0
A seguir aplicamos los tres pasos del algoritmo de asignación
I II III IVA 4 0 2 M (1)B 2 0 3 2 (1)C 1 1 2 0 (2)D 0 0 0 0 (0)
I II III IVA 4 0 2 M (1)B 2 0 3 2 (1)C 1 1 2 0 (2)D 0 0 0 0 (0)
El costo mínimo no cubierto por las rectas es 2 y aplico el paso cuatro del algoritmo ala últimamatriz la cual se transforma en:
I II III IVA 2 0 0 MB 0 0 1
C 1 3 2 0
D 0 2 0
A esta ultima matriz aplicamos el paso dos del algoritmo pero se llega a la conclusión de aplicararbitrariedad, por tener dos ceros para A así mismo para B y de igual manera para C. Pero debemosdestacar que esto nos esta indicando más de una solución óptima.
Se llega al siguiente matriz
X
X

Métodos de Toma de Decisiones
Santiago Contreras Aranda
230
I II III IVA 2 0 M
B 0 1
C 1 3 2 0
D 2 0
Pero recordemos que la máquina D es ficticia entonces ya tenemos una solución óptima
Máquinas LocalA IIIB IIC IV
6.6. Ejercicios sobre transporte y asignación
1. Aplicar el modelo de transporte para establecer el mejor plan si se tiene el siguiente matriz decostos unitarios, se sugiere aplicar el método u-v.
1 2 3 4 5 6 Oferta1 9 12 9 6 9 10 52 7 3 7 7 5 5 63 6 5 9 11 3 11 24 6 8 11 2 2 10 9Demanda 4 4 6 2 4 2
2. Una empresa tiene sus locales de producción en tres ciudades I, II, III que proveen a susalmacenes ubicados en A, B, C, D, Las capacidades mensuales de producción de cada local es 70,,90, y 115 respectivamente y las necesidades de los almacenes son 50, 60, 70, 95 si se tienen comocostos unitarios de transporte lo siguiente.
A B C DI 16 14 13 12II 15 14 20 15III 14 12 24 13
Establecer el plan óptimo de transporte.
3. Resolver el siguiente problema de transporte:
X
X
X
X
X

Métodos de Toma de Decisiones
Santiago Contreras Aranda
231
1 2 3 oferta1 20 20 30 802 24 15 50 503 20 20 40 60Demanda 80 40 90
4.. Una empresa suministra artículos a tres clientes cada uno necesita 40 unidades, la empresatiene 2 almacenes siendo que el almacén 1 dispone de 50 unidades y el almacén dos 40 unidades. La matriz siguiente representan los costos de envió del almacén a cada cliente.
Almacén ClientesI II III
1 20 20 252 10 50 40
Existe una multa por pedido no cumplido, por cada unidad no surtida del pedido del cliente unose incurre a un costo de penalización de 100. Por cada unidad no surtida del pedido del cliente 2 seincurre a un costo de penalización de 90 de manera análoga para el cliente tres se penaliza con 120.Plantear un plan de transporte balanceado para minimizar la suma de los costos de escasez y deenvío.
Resolver el siguiente problema de asignación
1.1 2 3 4 5
A 12 8 9 7 6B 8 9 6 6 8C 9 6 5 4 7D 7 7 4 6 6E 9 8 9 5 6
2.
1 2 3 4 5A 2 5 7 7 6B 5 4 4 6 7C 4 6 5 4 4D 7 7 4 6 3E 7 8 9 5 6
3. La UCV quiere inscribir a cuatro alumnos a un concurso de TGS, Matemáticas, Algoritmos,Estructura de datos, un alumno solo puede ser inscrito en un curso, por que las pruebas sonsimultáneas. Con la finalidad de seleccionar de sus cuatro mejores alumnos A, B, C, D aplica losmismos exámenes cubriendo las cuatro áreas del concurso siendo la matriz siguiente el resultado delas pruebas.

Métodos de Toma de Decisiones
Santiago Contreras Aranda
232
TGS MAT ALG, ESt-datosA 17 20 16 13B 18 17 18 11C 14 19 13 15D 15 14 16 19Cual debe ser la selección de los alumnos.4. Se encuesta con cinco empleados para realizar 4 trabajos. La siguiente matriz proporciona eltiempo que usa cada persona para realizar cada trabajo determine la asignación de los empleados alos trabajos que minimice el tiempo total requeridos para realizar los cuatro trabajos.
PERSOAL Tiempo (horas) por trabajoI II III IV
1 22 18 30 202 18 X 28 253 25 20 25 304 20 25 X 355 15 X 30 305. El ministerio de transportes recibe oferta para cuatro rutas de ómnibus escolares de la ciudad,las empresas realizan las siguientes ofertas
Empresas Oferta en soles por rutaI II III IV
1 4000 5000 x x2 x 4000 x 40003 3000 x 2000 X4 x X 4000 5000
Considere que solo se puede asigna una ruta a cada licitador use el algoritmo de asignación paraminimizar de operación de las cuatro rutas.
6.5. Algoritmo de Transbordo
Trabajo obligatorio para la casa grupos de cuatro como mínimoDebe de contener.IntroducciónEstructura del modeloEjemplos desarrolladosEjercicios propuestos.Libros de consulta:1.- Hamdy A. Taha Investigación de operaciones2.- Frederick S. Hillier; Gerald J. Liberman, Introducción a la Investigación de Operaciones.3. Kamleshj Mathur , Daniel Solow Investigación de Operaciones , el arte de la toma dedecisiones.

Métodos de Toma de Decisiones
Santiago Contreras Aranda
233
VII. MODELO DE REDES. Y PROGRAMACIÓN DE PROYECTOS CON PERT-CPM:
7.1. MODELOS DE REDES “TEORÍA DE GRAFOS”ALCANCES DE LASAPLICACIONES
En esta ocasión nos proponemos ha analizar un conjunto de problemas importantes deoptimización tales como por ejemplo.a) Construir una red de tuberías de agua para conectar los distritos de Trujillo, teniendo como
objetivo minimizar el costo de construcción.b) Determinar la ruta más corta que une dos ciudades en una red de caminos existentes.c) Determinar la capacidad diaria máxima en litros de una red de agua.d) Determinar un programa de flujo de costo mínimo de los campos petrolíferos a las
refinerías a través de una red de datos.e) Determinar el tiempo óptimo, para el inicio y fin de un conjunto de obras, proyectos de
construcción.Estos cinco casos nos induce a estudiar 5 algoritmos de optimización de redes. ie.1. Árbol de extensión mínima.2. Algoritmo de la recta más corta.3. Algoritmo de flujo máximo.4. Algoritmo de redes capacitadas de costo mínimo.5. Algoritmo de la ruta crítica. C.P.M. o PERT
7.2. DEFINICIONES BÁSICAS DE REDESRed o Grafo: es un conjunto denotado por G (N, A) en donde:N: conjunto de nodos; {xi, i = 1,......,n} se lee nodo xi, o simplemente por númerosA: conjunto de arcos o ramas = {(xi, xj), i = 1, j = 1.., ij}
Arco: esta formado por un par ordenado de nodos y representa una posible grandeza que ocurreentre los dos nodos.
Fig. (1) Fig. (2)
xi: es el nodo inicial del arco.xj: es el nodo final del arco.
Arco Dirigido u Orientado.Se llama así cuando permite un flujo o grandeza en una dirección y cero en dirección contraria.
2
1 3
4
5
6
7
12
UNIDAD VII

Métodos de Toma de Decisiones
Santiago Contreras Aranda
234
Trayectoria o Ruta: Es una secuencia de ramas o arcos distintos que conectan dos nodos sinimportar la dirección del flujo de cada rama.
Lazo o Ciclo: si se conecta un nodo consigo mismo. (1, 2) (2, 3) (3, 1)
Lazo Dirigido o Circuito: es un lazo donde todas las ramas tienen la misma dirección uorientación.
Red Conectada: es una red donde cada dos nodos distintos están unidos por lo menos por unatrayectoria o ruta. (1 2) (2 3) (3 4)
Árbol: es una red conectada que puede incluir solo un subconjunto de todos los nodos de la red.
Árbol de Expansión: es una red conectado que incluye todos los nodos sin permitir lazos.
7.3.ALGORITMO DE ÁRBOL DE EXPANSIÓN MÍNIMA
Este algoritmo consiste en unir los nodos de una red directa o indirectamente, usando la longitudmás corta de las ramas conectadas, si ciclos.Una aplicación consiste en construir carreteras que unan varias ciudades donde estas pasan porotras intermedias.
Algoritmo:
Dado el conjunto de nodos de una red N:N = {1, 2, 3,........n}Ck : Conjunto de todos los nodos conectados permanentemente en la iteración k del algoritmo.
kC : Conjunto de nodos que todavía no se han conectado en la iteración k.
Paso 0: tenemos C0 = , 0C = N
Paso 1: inicios con cualquier nodo i del conjunto 0C y definir C1 = {i}, 1C = N – {i}Hacer: k = 2
Paso General K: Seleccionar un nodo j*, en el conjunto no conectado, 1kC que produce larama mas corta hacia un nodo en el conjunto conectado Ck-1 unir j* con Ck-1 y eliminar de
1kC ie. *jCC;*jCC 1kk1kk
Si, kC , detenerse caso contrario k = k + 1
2
1 3
2 4 61
3 57
2
13
4
5
6
Métodos de Toma de Decisiones
Santiago Contreras Aranda
235
13
1
2 5
4
3
6
45
3
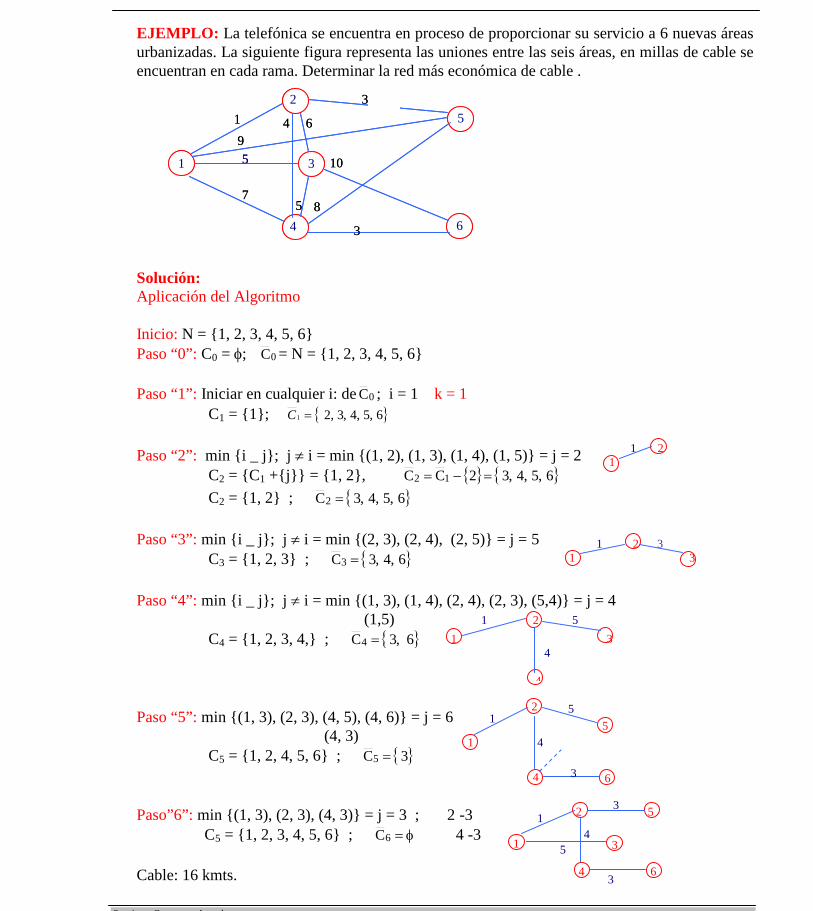
EJEMPLO: La telefónica se encuentra en proceso de proporcionar su servicio a 6 nuevas áreasurbanizadas. La siguiente figura representa las uniones entre las seis áreas, en millas de cable seencuentran en cada rama. Determinar la red más económica de cable .
Solución:Aplicación del Algoritmo
Inicio: N = {1, 2, 3, 4, 5, 6}Paso “0”: C0 = ; 0C = N = {1, 2, 3, 4, 5, 6}
Paso “1”: Iniciar en cualquier i: de 0C ; i = 1 k = 1C1 = {1}; 6,5,4,3,21 C
Paso “2”: min {i _ j}; j i = min {(1, 2), (1, 3), (1, 4), (1, 5)} = j = 2C2 = {C1 +{j}} = {1, 2}, 6,5,4,32CC 12
C2 = {1, 2} ; 6,5,4,3C2
Paso “3”: min {i _ j}; j i = min {(2, 3), (2, 4), (2, 5)} = j = 5C3 = {1, 2, 3} ; 6,4,3C3
Paso “4”: min {i _ j}; j i = min {(1, 3), (1, 4), (2, 4), (2, 3), (5,4)} = j = 4(1,5)
C4 = {1, 2, 3, 4,} ; 6,3C4
Paso “5”: min {(1, 3), (2, 3), (4, 5), (4, 6)} = j = 6(4, 3)
C5 = {1, 2, 4, 5, 6} ; 3C5
Paso”6”: min {(1, 3), (2, 3), (4, 3)} = j = 3 ; 2 -3C5 = {1, 2, 3, 4, 5, 6} ; 6C 4 -3
Cable: 16 kmts.
1 21
1 2 31 3
1 2 5
1 34
4
1
3
5
41
4
2
5
6
5
3
1
9
7
4 6
10
5 8
3
5
3
1
9
7
4 6
10
5 8
3
1
2
3
5
4 6

Métodos de Toma de Decisiones
Santiago Contreras Aranda
236
Ejemplos: sobre definiciones.1.) Dado la siguientes redes determinar:
(a) Una recta o trayectoria: (1,2) (2,6) (6,3) (3,10)(b) Un lazo o un ciclo. (1,2) (2,1) (1,2) (2,6) (6,3) (3,10) (10,1)(c) Un circuito o lazo dirigido, red conectada. (2,6) (6,3) (3,2) (5,7) (7,11) (11,4)(d) Un árbol (1, 2) (2, 6) (6, 3)(e) Una red de expansión (1,2) (2,3) (2,6) (6,7) (7,11) (11,4) (4, 9) (9,10) (3,5) (5,4)
Fig. (1) Fig. (2)
Ejemplo 2:
Solución del árbol expansión mínima
2
1
6
3 5 7
4 8
9
10
11
2
1
6
3
5
7
4
89
10
01
A2
C4
B3
D5
E6
F7
2
53
1
2
4
4
1
7
5
7
3
0
A
C
B
D
E
F
2
1
2
1
5
3

Métodos de Toma de Decisiones
Santiago Contreras Aranda
237
7.4. PROBLEMA DE RUTA MÁS CORTA
Ejemplo 1:
La empresa quiere que la energía viaje la menor distancia. Considerando que el costo de transporte es proporcional a la distancia.
Ejemplo 2:Un automóvil cuesta 12,000 dólares, el costo de mantenimiento depende de la edad del auto alinicio del año (ver tabla). Con la finalidad de evitar el costo de mantenimiento alto, se da como cotainicial de un nuevo, que es valorado de acuerdo a su edad (ver tabla). Mi preocupación es minimizarel costo neto incurrido en los próximos 5 años.
Durante los próximos 5 años
Formule como un P R .M .C.
PRECIO DEMANTEN.
ANUAL
EDAD DELAUTO
PRECIO DELAUTO POR COTA
INICIAL2000 0 1 70004000 1 2 60005000 2 3 20009000 3 4 1000
12000 4 5 50
Solución:
1
2
3
4
5
6
3
4 km
3 km
2 km
23
Central deenergía
Ciudad donde sequiere hacer llegar laenergía
sub. estación relevadora
CN = Costo de compra + Costo de Mantenimiento – El dinero recibido por la venta
CN = CC + CM – CV

Métodos de Toma de Decisiones
Santiago Contreras Aranda
238
Ci,j = Costo de mantenimiento durante los años i, i+1, i+2,...j – 1+ Costo de compra del auto al inicio del año i– Valor del auto al dar como adelanto al inicio del año j
La red tendría {1,2,3,4,5,6} seis nodos el nodo i corresponde al inicio del año i; para i < j
El arco (i, j) corresponde a la compra del auto nuevo al inicio del año i y conservarlo hasta elinicio del año j.
La longitud del arco (i, j): llamado Ci,j es el costo neto total incurrido por ser el dueño y tener elauto desde el inicio del año i hasta el principio del año j, si se compra un auto nuevo al inicio delaño i y se da como adelanto al inicio del año j
En miles de soles:
C12 = 2 + 12 – 7 = 7C13 = 2 + 4 + 12 - 6 = 12C14 = 2 + 4 + 5 + 12 – 2 = 21C15 = 2 + 4 + 5 + 9 + 12 – 1 = 31C16 = 2 + 4 + 5 + 9 + 12 + 12 -0.05=44C23 = 2 + 12 – 7 = 7C24 = 2 + 4 + 12 – 6 = 12C25 = 2 + 4 + 5 + 12 – 2 = 21C26 = 2 + 4 + 5 + 9 + 12 – 1 = 31C34 = 2 + 12 – 7 = 7C35 = 2 + 4 + 12 – 6 = 12C36 = 2 + 4 + 5 + 12 – 2 = 21C45 = 2 + 12 – 7 = 7C46 = 2 + 4 + 12 – 6 = 12C56 = 2 + 12 – 7 = 7
i jCi,ji j
Compra y Conservación
Significado de la ruta1 2 + 2 1
1 3 6Se mantiene hasta el inicio al año 3 y seda como adelanto.1 3 5 6 = 40
21 12 7
33
12
1 63 42 57
7 7 77
12
1212
31
3121
44
2121
Métodos de Toma de Decisiones
Santiago Contreras Aranda
239
Ob: que cada ruta desde el nodo 1 al 6 es el costo neto incurrido durante los próximos 5 años,que corresponde a una estrategia específica de cambiar el automóvil.
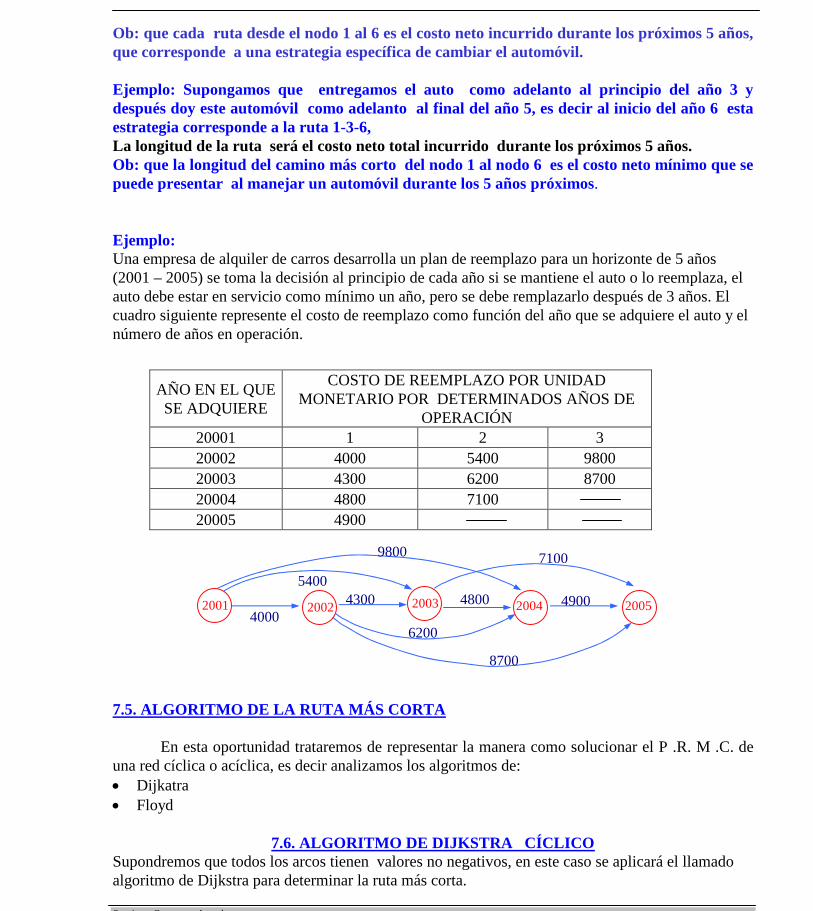
Ejemplo: Supongamos que entregamos el auto como adelanto al principio del año 3 ydespués doy este automóvil como adelanto al final del año 5, es decir al inicio del año 6 estaestrategia corresponde a la ruta 1-3-6,La longitud de la ruta será el costo neto total incurrido durante los próximos 5 años.Ob: que la longitud del camino más corto del nodo 1 al nodo 6 es el costo neto mínimo que sepuede presentar al manejar un automóvil durante los 5 años próximos.
Ejemplo:Una empresa de alquiler de carros desarrolla un plan de reemplazo para un horizonte de 5 años(2001 – 2005) se toma la decisión al principio de cada año si se mantiene el auto o lo reemplaza, elauto debe estar en servicio como mínimo un año, pero se debe remplazarlo después de 3 años. Elcuadro siguiente represente el costo de reemplazo como función del año que se adquiere el auto y elnúmero de años en operación.
AÑO EN EL QUESE ADQUIERE
COSTO DE REEMPLAZO POR UNIDADMONETARIO POR DETERMINADOS AÑOS DE
OPERACIÓN20001 1 2 320002 4000 5400 980020003 4300 6200 870020004 4800 710020005 4900
7.5. ALGORITMO DE LA RUTA MÁS CORTA
En esta oportunidad trataremos de representar la manera como solucionar el P .R. M .C. deuna red cíclica o acíclica, es decir analizamos los algoritmos de: Dijkatra Floyd
7.6. ALGORITMO DE DIJKSTRA CÍCLICOSupondremos que todos los arcos tienen valores no negativos, en este caso se aplicará el llamadoalgoritmo de Dijkstra para determinar la ruta más corta.
2003 2004 200520022001
5400
40004300
9800 7100
4800 4900
6200
8700

Métodos de Toma de Decisiones
Santiago Contreras Aranda
240
Este algoritmo esta estructurado par determinar la ruta mas corta entre el nodo de origen y cada unode los otros dados de la red. En este algoritmo se considera que la longitud de todos los arcos son positivos. Los cálculos del algoritmo avanzan de un nodo i a un nodo j inmediato siguiente, utilizando el
criterio de clasificación.:
Usa el procedimiento siguienteui: distancia mas corta del nodo 1 (origen) al nodo idi,j: longitud del arco (i, j)Clasificamos el nodo j así:[uj,i ] = [ ui + di,j , i ], 0d j,i
Los nodos según Dijkatra se clasifican en temporales y permanentes. Una clasificación temporal se puede reemplazar por otra clasificación si se encuentra otra ruta
más corta.
Pasos:Paso 0: Clasifica el nodo origen con [ 0, –] y determine i = 1
Paso i: a.) Calcular las clasificaciones temporales [ ui + di,j , i ] para cada nodo j al que se puedellegar desde el nodo i. Siempre que el nodo j no sea clasificado como permanente. Tomar el mínimode todos los nodos clasificados temporalesSi el nodo j ya esta clasificado con [ uj, k] a través de otro nodo k y si ui + di,j < uj , reemplazar [ uj ,k ] por [ ui + di,j , i ].
b.) Si todos los nodos tienen nodos permanentes, deténgase, caso contrario seleccionar laclasificación [ ur, s] con la distancia más corta ur entre todas las clasificaciones temporales. Romperel importe temporalmente.
Tomando nuestro ejemplo:
Iteración 0: Al nodo 1 se le asigna [0, –] si se clasifica.
Iteración 1: Es posible llegar a los nodos 2 3 partiendo del nodo 1:
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [0 + 4, 1] = [4, 1] Temporal3 [0 + 3, 1] = [3, 1] Temporal
i j( )
3
1
2
3
4
5
6
3
42
23
2

Métodos de Toma de Decisiones
Santiago Contreras Aranda
241
min 1,31,3,1,4 corresponde al nodo “3” este pasa a estado permanente.
Iteración 2: Del nodo 3 se puede llegar al 5.
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [4, 1] Temporal3 [3, 1] Permanente5 [3 + 3, 1] = [6, 3] Temporal
min. {[4,1]; [6,3]} = [4,1] corresponde al nodo “2” este pasa a estado permanente.
Iteración 3: Del nodo 3 se llega hasta 4 y 5.
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [4, 1] Permanente3 [3, 1] Permanente4 [7,2] Temporal5 [6, 3] Temporal
[6, 2]
min {[7,2]; [6,2]; [6,3]} = [6,3] el nodo “5” cambia.[6,2]
Iteración 4: Del nodo 5 se llega hasta 6.
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [4, 1] Permanente3 [3, 1] Permanente4 [7,2] Temporal5 [6, 2] Permanente
[6, 3]6 [8, 5] Temporal
min. {[7,2]; [8,5]} = [7,2] el nodo “4” cambia a permanente.Iteración 5: Del nodo 4 se llega hasta 6.
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente

Métodos de Toma de Decisiones
Santiago Contreras Aranda
242
2 [4, 1] Permanente3 [3, 1] Permanente4 [7, 2] Permanente5 [6, 2] ó [6, 3] Permanente6 [8, 5] Temporal
min. [8,5] = el nodo “6” este pasa a estado permanente.
Ejemplo:
T1
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [0 + 100, 1] = [100, 1] Temporal3 [0 + 30, 1] = [30, 1] Temporal
T2: Desde el nodo 2 se llega a los nodos 4 y 5, se clasifican en:
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [100, 1] Temporal3 [30, 1] Permanente4 [40, 3] Temporal5 [90, 3] Temporal
T3: Desde el nodo 4 se puede llegar a los nodos 2 y 5, la lista se clasifican en:
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [40 + 15, 4] = [55, 4] Temporal
6 [8, 5] 5[6, 2] 2 [4, 1] 21 1 5 6
[3, 1][6, 3] 3 31 1 5 6
8 Unidades
8 Unidades
1
2
3
4
530
15
20
10020 5010
[100,2] [55,4]
[0, –]
[40, 3]
[90, 4], [90, 3]
[30, 1]

Métodos de Toma de Decisiones
Santiago Contreras Aranda
243
3
1
2
3
4
5
6
3
42
23
2
3 [30, 1] Permanente4 [40, 3] Permanente5 [90, 4] ó [90, 3] Temporal
El nodo 2 se puede clasificar como Permanente.
T5: Desde el nodo 2 solo se llega al nodos 3 que es permanente no se puede clasificar, luego la listaserá:
NODO CLASIFICACIÓN ESTADO
1 [0, –] Permanente2 [55, 4] Permanente3 [30, 1] Permanente4 [40, 3] Permanente5 [90, 4] Temporal
Observación: El nodo 5 es el único temporal debido a que este no lleva a otro nodo, su estado seconvierte a permanente y termina.
ALGORITMO DE DIJKATRA
Inicio: – Escribir a todos los nodos una etiqueta temporal.
000000000000
xxxxxx 654321
000000000000
654321
– Colocar al nodo inicial uno permanente un cero.
0000000000*0
xxxxxx 654321
Primero: k = 1 Cálculo de etiquetas temporales a partir de la última permanente.
min {Valor permanente + distancia a los nodos unidad}
min {0 + 4} = 4 para nodo 2.
min {0 + 3} = 9 para nodo 3.
Métodos de Toma de Decisiones
Santiago Contreras Aranda
244
00000034*0
xxxxxx 654321 Ver el número de todos los temporales.
000000*34*0
xxxxxx 654321 Nodo tiene el permanente.
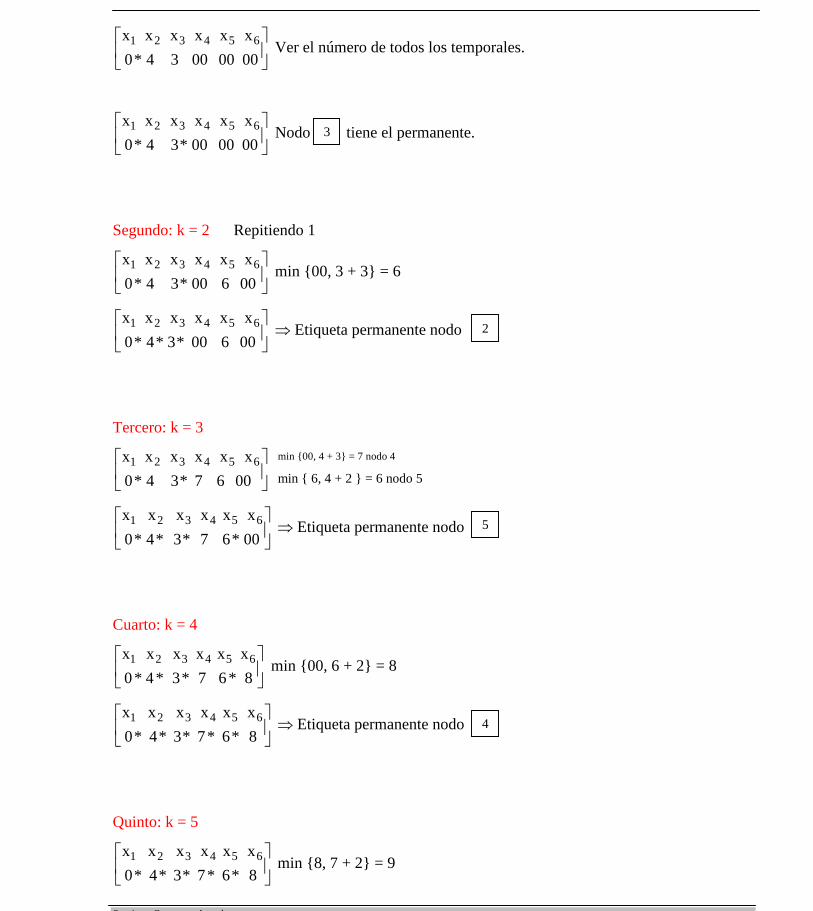
Segundo: k = 2 Repitiendo 1
00600*34*0
xxxxxx 654321 min {00, 3 + 3} = 6
00600*3*4*0
xxxxxx 654321 Etiqueta permanente nodo
Tercero: k = 3
0067*34*0
xxxxxx 654321
00*67*3*4*0
xxxxxx 654321 Etiqueta permanente nodo
Cuarto: k = 4
8*67*3*4*0
xxxxxx 654321 min {00, 6 + 2} = 8
8*6*7*3*4*0
xxxxxx 654321 Etiqueta permanente nodo
Quinto: k = 5
8*6*7*3*4*0
xxxxxx 654321 min {8, 7 + 2} = 9
3
2
5
min {00, 4 + 3} = 7 nodo 4
min { 6, 4 + 2 } = 6 nodo 5
4
Métodos de Toma de Decisiones
Santiago Contreras Aranda
245
*8*6*7*3*4*0
xxxxxx 654321 Etiqueta permanente nodo
EJERCICIOS
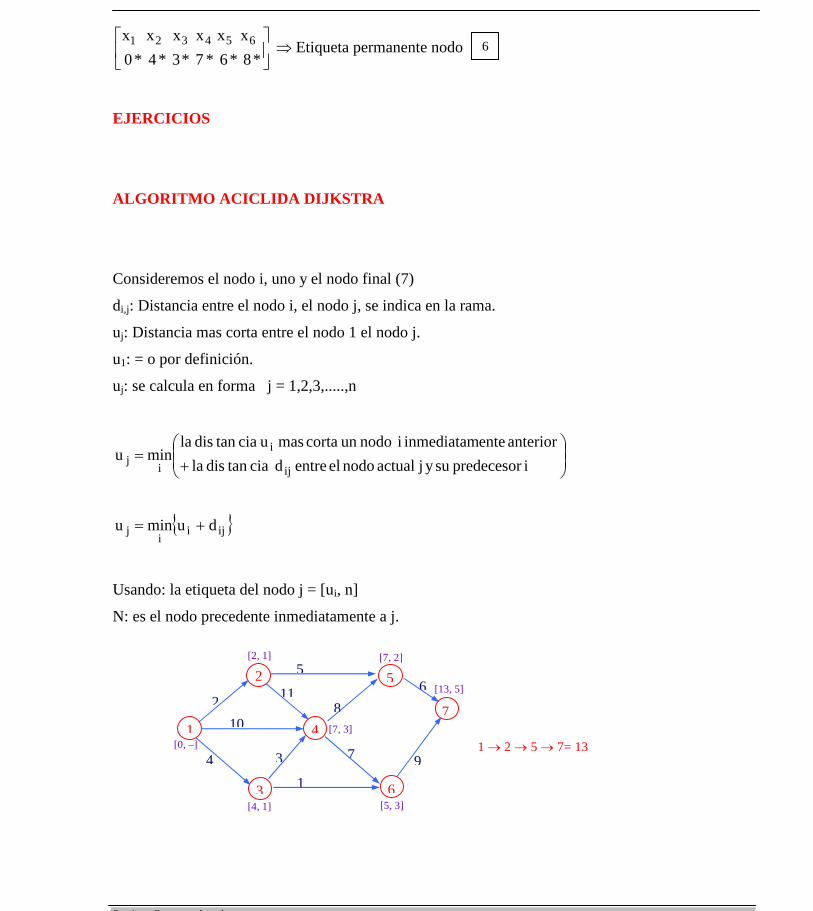
ALGORITMO ACICLIDA DIJKSTRA
Consideremos el nodo i, uno y el nodo final (7)
di,j: Distancia entre el nodo i, el nodo j, se indica en la rama.
uj: Distancia mas corta entre el nodo 1 el nodo j.
u1: = o por definición.
uj: se calcula en forma j = 1,2,3,.....,n
ipredecesorsuyjactualnodoelentredciatandisla
anteriorenteinmediataminodouncortamasuciatandislaminu
ij
i
ij
ijii
j duminu
Usando: la etiqueta del nodo j = [ui, n]
N: es el nodo precedente inmediatamente a j.
6
2 5
1
3
4
5
6
72 8
1
11
4 3 9
10
6
7
[5, 3]
[0, –]
[4, 1]
[7, 3]
[13, 5]
[2, 1] [7, 2]
1 2 5 7= 13

Métodos de Toma de Decisiones
Santiago Contreras Aranda
246
uj = min {ui + di,j}
i
NODO DISTANCIA MÁS CORTA HASTA DESDE ETIQUETA
1 u1 = 0 [0, –]
2
u2 = min {ui + di,2} = min {u1 + d1,2}
i
u2 = min {0 + 2}= 2 desde 1
[2, 1]
3
u3 = min {ui + di,3}
i
= min {u1 + d1,3 } = 4 desde 1
0 + 4
[4, 1]
4
u4 = min {ui + di,4}
i
= min {u1 + d1,4; u2 + d2,4; u3 + d3,4}
{ 0 + 10, 2 + 11, 4 + 3} = 7 desde 3
[7, 3]
5
u5 = min {ui + di,5}
i
= min {u2 + d2,5; u4 + d4,5}
{2 + 5, 7 + 8} = 7 desde 2
[7, 2]
2 6
1
3
4
5
6
72 7
2
5
4 9 5
3
8
[6, 4]
[0, –]
[4, 1]
[7, 2]
[11, 5][11, 6]
[2, 1] [8, 2]
1 4 6 7 = 111 2 5 7 = 11

Métodos de Toma de Decisiones
Santiago Contreras Aranda
247
6
u6 = min {ui + di,6}
i
= min {u3 + d3,6; u4 + d4,6}
{4 + 1, 7 + 7} = 5 desde 3
[5, 3]
7
u7 = min {ui + di,7}
i
= min {u5 + d5,7; u6 + d6,7}
{7 + 6, 5 + 9} = 13 desde 5
[13, 5]
Solución:
7521 672 = 13 unidades de 3 unidades de grandeza.
15,222,755,137
Recta 7521 con 13 unidades
7.7. ALGORITMO PARA UNA RED ACÍCLICA
Se basa en el cálculo recursivo
Inicio: - Nodo inicial: nodo 1 (fuente u origen)
- Nodo final: nodo 6- di,j: Distancia entre el nodo actual j y su predecesor i se indica en la rama.- Red: acíclica- uj = distancia más corta entre el nodo 1 y nodo j; i = 1, 2,.....,n- u1 = 0- ui = distancia más corta a un nodo i inmediatamente anterior j.- uj = min. { ui + di,j}
3
1
2
3
4
5
6
3
4 2
23
2

Métodos de Toma de Decisiones
Santiago Contreras Aranda
248
i
Usamos la etiqueta j = [uj, n]
n: nodo que procede inmediatamente a j.
NODOCALCULO uj = min { ui + di,j}
IETIQUETA
1 u1 = 0 [0, –]
2u2 = min {u1 + d1,2} = 4 desde nodo 1
1[4, 1]
3u3 = min {u1 + d1,3 } = 3 desde 1
0 + 3[3, 1]
4u4 = min = {u2 + d2,4}
{4 + 3} = 7 desde 2[7, 2]
5u5 = min {u2 + d2,5; u3 + d3,5}= 6
{4 + 2, 3 + 3} = 3
[6, 3]
[6, 2]
6u6 = min { u4 + d4,6; u5 + d5,6}
{7 + 2, 6 + 2}[8, 5]
11,422,6
11,333,65,855,86
6531ó6521
7.8. PROBLEMA DEL FLUJO MÁXIMO
INTRODUCCIÓN
Recordemos que muchos problemas de una red se pueden modelar en la cual se considera unarco con capacidad limitada. Para decir se quiere transportar la máxima cantidad de flujo desdeun punto de partida (fuente) o un punto final (pozo) ie.
DESTINOPOZO
FUENTE

Métodos de Toma de Decisiones
Santiago Contreras Aranda
249
62
0
A
C
B
D
E
F
8 1
17
3
4
4
4
5
9
Al respecto diremos que existen muchos algoritmos especializados para dar solución a los P.F.M.
Observación:
1. Se debe considerar una red dirigida.2. Tiene una fuente y destino (pozo).3. Los otros nodos son de trasbordo.4. Capacidad de los arcos.5. El objetivo es determinar el patrón factible
de flujo a través de la red que maximice elflujo total desde la fuente de destino.
7.9. ALGORITMO DE TRAYECTORIA AUMENTADA DE FORD FULKERSON
Se fundamenta en dos conceptos intuitivos, Red Residual y Trayectoria Aumentada.
Red Residual y Trayectoria aumentada
1. Asignando flujos a los arcos de la red original.La red residual muestra las capacidades restantes 1° capacidad residual.
Ejemplo:
Consideremos el arco B0 tiene una capacidad de arco 7, supongamos que el flujo asignadoes 5, lo que deja una capacidad residual 7 – 5 = 2 para cualquier asignación de flujo adicional através de B0 y se describe así
2 para el flujo de 0 a B
5 para el flujo de B a 0
0 B2 5
62
0
A
C
B
D
E
F
81
1
7
3
4
4
4
5
9
00
00
0
00
00
0 0
0
30
20
10
40 20
3020
1
23
4
510
0
0
0 0
0
0

Métodos de Toma de Decisiones
Santiago Contreras Aranda
250
Sea el arco (i, j) con capacidad inicial jiij C,C
Para un nodo j que recibe un flujo del nodo i define: [aj, i]
aj: es el flujo del nodo i al nodo j
Paso 1: Para todos los arcos (i, j) determine la capacidad residual igual a la capacidad inicial (cij,cji) = (cij, cji)
Sea, 1a el nodo origen [, –] hacer i = 1, ir al paso 2.
Paso 2: Determine si como los nodos determinado no clasificados j a los que se pueden llegardirectamente des de i por medio de arcos positivos iiij s;sj0c ir a 3 sino al
4.
Paso 3: Determine k si de manera que
i
ijik
sj
}c{maxc
Determine ak = cik y clasifique el nodo k en [ak, i], si el nodo final se ha clasificado ir alpaso 5 caso contrario determine i = k y vaya al paso 2.
Paso 4: (Retroceso) Si i = 1, no son posibles otras penetraciones adicionales ir al paso 6. Casocontrario, sea r el nodo que se ha clasificado inmediatamente antes del nodo actual i,eliminar i del conjunto de nodos que están adyacentes a r hacer i = r vaya al paso 2.
Paso 5: (Determinación de la red residual)
Sea Np = {1, k1, k2,..., n} definimos los nodos de la ruta de penetración a la p desde elpunto inicial 1 al nodo final n.
Entonces el flujo máximo a lo largo de la ruta se calcula
fp = min {a1, ak1, ak2,...,an}, con respecto a k.
La capacidad residual de cada arco a lo largo de la ruta de penetración se disminuye enfp en dirección del flujo y se le aumenta en fp en dirección inversa es decir para losnodos i y j en la ruta, en el flujo residual se cambia de
iajdeesflujoelsi)fc,f(cb)
jaideesflujoelsi)fc,f(ca))c,(c
pjipij
pjipijjiij
0 B7 0
[0, B] [7,0]

Métodos de Toma de Decisiones
Santiago Contreras Aranda
251
Reintegrar cualquier nodo que se eliminaron al paso 4.
Determine i = 1 y regrese al paso para intentar una nueva ruta de penetración.
Paso 6: Solución
a.) Dado que se ha determinado m rutas de penetración calcule el flujo máximo en la red así:F = f1 + f2 + f3 +.....+ fm
b.) Dado que los residuales inicial y final del arco (i,j) son dados jiijjiij c,cc,c el flujo
optimo se calcula: jijiijij cc,cc,
si > 0 el flujo optimo de i a j es
si > 0 el flujo optimo de j a i es
Ejemplo 2:
Inicial
sidualRejiij
InicialsidualRe
jiij c,cc,c
30
2010
4020
30201
2 3
4
5
10
00
0
0
0
0
5
[, –]
[20, 1]
f1 = 20
[30, 1]
30
2010
400
10201
2 3
4
5
10
00
20
0
20
05
[10, 3]
[20, 4]
[20, 1] [40, 2]
0
f2 = 10
30
10
10
300
10
101
2 3
4
5
0
1010
010
20
015
[, –]
[30, 2]
F3 = 10[10,1]
2020
10
10
300
10
01
2 3
4
5
0
1020
1010
20
015
[, –]
[10, 2]
F4 = 10
[10,1]
20
[10,3]

Métodos de Toma de Decisiones
Santiago Contreras Aranda
252
Paso 1: Hacemos a1 = , clasificamos el nodo 1 con [, –1] hacemos i = 1.
Paso 2: Determinamos
s1 = {2, 3, 4}
Paso 3: k = 3 debido que c13 = max {c12, c13, c14} = max {20, 30, 10}
Determinamos a3 = c13 = 30, clasificamos el nodo 3 con [30,1] repetir el paso 2
Paso 2: s3= {4, 5}
Paso 3: k = 5 c35 = max {c34, c35} = max {10, 20}
Hacemos: a5 = c35 = 20
Clasificamos el nodo 5 con [20, 3]
Se logra la penetración, vaya al paso 5.
Paso 5: La ruta de penetración se determina de las clasificaciones empezando el nodo 5 yterminando en el uno 1.
ie: 5,3,1Nluego11,3033,205 p
f1 = min {a1, a3, a5} = min {, 30, 20} = 20
10
10
10
200
0
01
2 3
4
5
0
2020
2010
30
015
[, –]
[10, 2]
F5 = 10[10,3]
20
[10,4] 0
10
0
20
00
1
2 3
45
3010
20
10
30
10
[, –]
No existepenetración
[10,3]
10
0
1
2
4
310
0
30 020
0
5
4
3

Métodos de Toma de Decisiones
Santiago Contreras Aranda
253
Capacidad residual a lo largo de la ruta N1 son:
(c13, c31) = (30 – 20, 0 + 20) = (10, 20)
(c35, c53) = (20 – 20, 0 + 20) = (0, 20)
ITERACIÓN 2.
Paso 1: Hacemos a1 = y clasificamos el nodo 1 [, –], hacer i = 1.
Paso 2: s1 = {2, 3, 4}
Paso 3: k = 2 mas
c13 = max {c12, c13, c14} = max {20, 10, 10} = 20
a2 = c12 = 20
Etiqueta del nodo 2 [20, 1] ¿Se alcanzó el nodo final? No
Paso 2: s2 = {2, 3, 4}
Paso 3: k = 3 mas
c23 = max {c23, c25} = 40; a3 = c23 = 40
Clasificamos el nodo 3: [40, 2]; i = 3, repetir el paso 2.
Paso 2: s3 = {4} no tomamos c35 mas no existe ie c35 = 0
Paso 3: k = 4, c34 = 10, a4 = c34 = 10, clasificamos el nodo 4 [10,3], i = 4 repetir paso 2
Paso 2: s3 = {5} 0
Paso 3: k = 5, mas: c45 = max {c45} = 20,
a5 = c45 = 20, clasificaremos el nodo 5: [20, 4] se ha logrado una penetración ir al paso5.
Paso 5: la ruta de penetración se determina de las clasificaciones iniciando en el nodo 5y terminando en el nodo 1.
,11,2022,4033,1044,205
Entonces N2 = {1,2,3,4,5}
f2 = min {,20,40,10,20} = 10 f2 = 10
Los residuales a través de la ruta N2 es:
1
2
4
310
0
10 2020
0
5
4
3

Métodos de Toma de Decisiones
Santiago Contreras Aranda
254
(c12, c21) = (20 – 40, 0 + 10) = (10, 10)
(c23, c32) = (40 – 10, 0 + 10) = (30, 10)
(c34, c43) = (10 – 10, 5 + 10) = (0, 15)
(c45, c54) = (20 – 10, 0 + 10) = (10, 10)
ITERACIÓN 3.
Paso 1: Hacer a1 = y clasificamos el nodo 1 con [, –], hacemos i = 1.
Paso 2: si = {1, 3, 4}
Paso 3: k = 3, mas: c2k = max {10,10,10,10} = 10
Hacer: a2 = c12 = 10, clasificando 2 [10,1], hacemos i = 2 ir al paso 2.
Paso 2: s3 = 0, c34 = c35 = 0, ir al paso 4 para retroceder.
Paso 4: i = 3, el nodo 3 da el nodo r = 2 inmediatamente anterior, eliminamos el nodo 3 ydeterminamos i = r = 2.
Paso 2: s2 = {5} Observación: el nodo 3 es eliminado en el paso de retroceso.
Paso 3: k = 5, c2k = c25 = 30 a5 = 30 clasificamos el nodo 5 [30,2] se logro una penetración,ir al paso 5.
Paso 5: 5,2,1N,15,1022,305 3
f3 = min {,30,10} = 10 f3 = 10
(c12, c21) = (10 – 10, 10 + 10) = (0, 20)
(c25, c52) = (30 – 10, 0 + 10) = (20, 10)
ITERACIÓN 4. Se refiere análogamente y se tiene:
N4 = {1,3,2,5} f4 = 10
ITERACIÓN 5. Se repite y se tiene:
N5 = {1,4,5} f5 = 10
ITERACIÓN 6. No es posible determinar penetraciones adicionales pues todos los arcos fueradel nodo 1 residuales cero, ir al paso 6.
Paso 6: Determinar la solución.
E l flujo máximo en la red es F = f1 + f2 + f3 + f4 + f5 = 20 + 10 + 10 + 10 + 10
F = 60 unidades.

Métodos de Toma de Decisiones
Santiago Contreras Aranda
255
El flujo en los diferentes arcos se calcula restando los últimos residuales en la iteración 6 ie (cij,cji)6 de las capacidades iniciales jiij c,c así:
ARCO jiij c,c – (cij, cji)6 FLUJO DIRECCIÓN
(1, 2) (20, 0) – (0, 20) = (20, –20) 20 1 2
(1, 3) (30, 0) – (0, 30) = (30, –30) 30 1 3
(1, 4) (10, 0) – (0, 10) = (10, –10) 10 1 4
(2, 3) (40, 0) – (40, 0) = (40–40, 0) 0 0
(2, 5) (30, 0) – (10, 20) = (30–10, –20) 20 2 5
(3, 4) (10, 5) – (0, 15) = (10–0, 5–15) 10 3 4
(3, 5) (20, 0) – (0, 20) = (20–0, 0–20) 20 3 5
(4, 5) (20, 0) – (0, 20) = (20–0, –20) 20 4 5
Ejercicios
62
1
2
4
3
5
6
7
81
1
7
3
4
4
45
9
00
00
0
00
00
0 0
0
3020
1010
1
2
3
410
30
20
1010
1
2
3
410
0
0
0
0
5
20
30
1020 20
20
101
23
4 50

Métodos de Toma de Decisiones
Santiago Contreras Aranda
256
Algoritmo:
1. Se identifica una trayectoria de aumentoSi fuera posible determinar la trayectoria entonces
2. Determinar la capacidad residual min {7, 5, 6} = c* = f*C* = 5
3. Se disminuye en c* la capacidad residual de cada arco en la dirección de la trayectoria.Se aumenta en c* la capacidad residual de cada arco en la dirección opuesta a la trayectoria.
1 6
7
35 0 15
5
2 5
15
72 8
1 5 73 1010
1 3 5211
711
1 6 5412
712
1 6413
713
1 6 34 714
5

Métodos de Toma de Decisiones
Santiago Contreras Aranda
257
7.10. PROBLEMA DE FLUJO RESTRINGIDO DE COSTO MÍNIMO
Este problema generaliza el P.F.M. en los aspectos siguientes:
i) Todos los arcos son direccionales (Un sentido)ii) Un costo de flujo por unidad (no negativo) esta asociado con cada arco.iii) Los arcos pueden tener límites positivos de capacidad inferior.iv) Cualquier nodo en la red puede actuar como un punto de origen.El modelo que pretendemos construir determina los flujos en los diferentes arcos que minimizan elcosto total y satisfacen las condiciones (restricciones) de flujo en los arcos y las cantidades de ofertay demanda en los nodos.
Primero presentaremos el modelo del flujo de red restringido y un equivalente en PL. Después laestructura de programación lineal y después algoritmo simple de redes restringidas.
REPRESENTACIÓN DE LA RED
Sea G (N, A); N conjunto de nodos, A conjunto de arcos.
xij: La cantidad de flujo de i al nodo j ie.
uij (lij): Capacidad superior (inferior) del arco ij
cij: Costo del flujo por unidad del nodo i al nodo j
fi: Flujo neto en el nodo i.
[fj]: Asume un valor positivo si se trata de una oferta.
[fi]: Asume un valor negativo si se trata de una demanda.
Ejemplo:
La empresa San Fernando proporciona maíz de tres almacenes a sus tres granjas, la cantidad deoferta en los almacenes son 100,200 en 50 toneladas. La empresa en su mayor parte usa trailer paratransportar el alimento con excepción de tres rutas que una camiones la figura adjunta asume lasrutas disponibles entre los almacenes y las granjas, los almacenes están representados por los nodos
y ; y los grupos por y
Las rutas permiten el trasbordo entre los almacLa empresa San Fernando proporciona maíz de tresalmacenes a sus tres granjas, la cantidad de oferta en los almacenes son 100,200 en 50 toneladas. Laempresa en su mayor parte usa trailer para transportar el alimento con excepción de tres rutas queuna camiones la figura adjunta asume las rutas disponibles entre los almacenes y las granjas, losalmacenes están representados por los nodos y ; y los grupos por y
Las rutas permiten el trasbordo entre los almacenes; los arcos (1,4) (3,4) y (4,6) son rutas decamiones. Estas rutas tienen capacidades mínimas y máximas por ejemplo la capacidad de la ruta(1,4) es de 50 y 80 toneladas, (3,4) es de 70 y 120, (4,6) es de 100 y 120. Todos las otras rutasutilizan trasbordo cuya capacidad máxima es ilimitada.
1 2 3 4 5 6
i jxij
i jxij; cij
(lij, uij)
[fj][fi]
1 2 3 4 5 6

Métodos de Toma de Decisiones
Santiago Contreras Aranda
258
ESTRUCTURA DEL PROGRAMA LINEAL
Considerando las definiciones antes realizadas se tiene:
A)j,i(
ijijxcMin
Aj,i
jij
Ak,jk
jk Nj;fxx
ijijij uxl
La ecuación mide en el nodo j el flujo neto fj en el nodo j ie.
Observaciones:
1. El nodo j actúa como un punto de origen si fj > 0
2. El nodo j actúa como un punto de llegada si fj < 03. Si hacemos: xij = xij + lij, eliminamos la cota inferior lij de las restricciones.4. La nueva variable xij tiene como límite superior uij – lij.
1
2
3
2
(Flujo de salida del nodo j) – (Flujo de entrada al nodo j) = fj
C4
1
2
3
4
5
6322
1
2
1
5
6
4
[-150]
[-120]
[100]
[200] [-80]
[50]
(100,120)(70,120)
(50,80)4

Métodos de Toma de Decisiones
Santiago Contreras Aranda
259
5. El flujo neto en el nodo i se convierte en [fi] – lij
6. El flujo neto en el nodo j se convierte en [fj] + lij
Ejemplo:
Escribir el programa lineal para el ejemplo antes y después sustituir las cotas inferiores.
A) Las primeras restricciones del programa lineal relacionan el flujo de entrada y salida en cadanodo.
xij x12 x13 x14 x23 x25 x34 x35 x46 x56
Minimice cij 3 4 1 5 6 1 2 2 4
Nodo 1 1 1 1 = 100
Nodo 2 –1 1 1 = 200
Nodo 3 –1 –1 1 1 = 50
Nodo 4 –1 –1 1 = -150
Nodo 5 –1 –1 1 = -80
Nodo 6 –1 –1 = -120
Cota inf. 0 0 50 0 0 70 0 100 0
Cota sup. 80 120 120
OBSERVACIONES:
7.4.La disposición de los coeficientes en las restricciones asociada a xij tiene 1 en la linea i, y en lacolumna j tiene -1 el resto son todos ceros.
7.5.Los comentarios en es típica en los modelos de redes.
B) Cuando se hacen los cambios las variables con..........inferiores:50xx 1
1414 70xx 13434 1001
4646 xx
i j
ANTES
S/. cij
(lij, uij)xij
[fj][fi]
i j
DESPUÉS
S/. cij
(uij – lij)xij
[fj + lij][fij -lij]
1

Métodos de Toma de Decisiones
Santiago Contreras Aranda
260
X12 x13114x x23 x25
134x x35
146x x56
Minimice 3 4 1 5 6 1 2 2 4
Nodo 1 1 1 1 = 50
Nodo 2 –1 1 1 = 200
Nodo 3 –1 –1 1 1 1 = -20
Nodo 4 –1 –1 = -130
Nodo 5 –1 –1 1 = -80
Nodo 6 –1 –1 = -20
Cotas super. 30 50 20
La red procede ser modificado solo en el grafico los flujos, lo demás se mantiene.
Debemos destacar que la red correspondiente después de sustituir las cotas inferiores es lasiguiente:
fi – lij
fi + lij
1
2
3
4
5
6322
1
2
1
5
6
4
[-130]
[-20]
[50]
[200] [-80]
[-20]
(20)(50)
(30)4