STEP 7 - Regulación PID

of 42
-
Upload
tiolouis32 -
Category
Documents
-
view
33 -
download
0
Transcript of STEP 7 - Regulación PID
-
Prlogo, Indice
Introduccin 1
Parametrizacin 2
Bloques de funcin 3
Bibliografa AIndice alfabtico
C79000-G7078-C516-01
Software estndar paraS7-300/400PID Control (Regulacin PID)
Manual
SIMATIC
-
iiPID Control
C79000 G7078 C516 01
Este manual contiene las informaciones necesarias para la seguridad personal as como parala prevencin de daos materiales. Las informaciones estn puestas de relieve medianteseales de precaucin. Las seales que figuran a continuacin representan distintos grados depeligro:
! PeligroSignifica que, si no se adoptan las medidas preventivas adecuadas, se producir la muerte,lesiones corporales graves o daos materiales considerables.
! PrecaucinSignifica que, si no se adoptan las medidas preventivas adecuadas, puede producirse lamuerte, lesiones corporales graves o daos materiales considerables.
! CuidadoSignifica que, si no se adoptan las medidas preventivas adecuadas, pueden producirselesiones corporales o daos materiales.
Nota
Se trata de una informacin importante, sobre el producto o sobre una parte determinada delmanual, sobre la que se desea llamar particularmente la atencin.
La puesta en funcionamiento y el servicio del equipo slo deben ser llevados a cabo con-forme con este manual.
Solo est autorizado a intervenir en este equipo el personal cualificado. En el sentido delmanual se trata de personas que disponen de los conocimientos tcnicos necesarios para po-ner en funcionamiento, conectar a tierra y marcar los aparatos, sistemas y circuitos de acuerdocon las normas estndar de seguridad.
Advertencia importante:
! PrecaucinEl equipo o los componentes del sistema slo se podrn utilizar para los casos de aplicacinprevistos en el catlogo y en la descripcin tcnica, y slo en unin de los equipos ycomponentes de proveniencia tercera recomendados y homologados por Siemens.
El funcionamiento correcto y seguro del producto presupone un transporte, un almacena-miento, una instalacin y un montaje conforme a las prcticas de la buena ingeniera, ascomo una operacin y un mantenimiento rigurosos.
SIMATIC y SINEC son marcas registradas por SIEMENS AG.
Los restantes nombres y designaciones contenidos en el presente impreso pueden ser marcasregistradas cuya utilizacin por terceros para sus fines pueden violar los derechos de susproprietarios.
Hemos probado el contenido de esta publicacin con la concordan-cia descrita para el hardware y el software. Sin embargo, es posibleque se den algunas desviaciones que nos impiden tomar garantacompleta de esta concordancia. El contenido de esta publicacinest sometido a revisiones regularmente y en caso necesario seincluyen las correcciones en la siguiente edicin. Agradecemossugerencias.
Copyright Siemens AG 1996 All rights reservedLa divulgacin y reproduccin de este documento, as como el uso yla comunicacin de su contenido, no estn autorizados, a no ser quese obtenga el consentimiento expreso para ello. Los infractoresquedan obligados a la indemnizacin de los daos. Se reservantodos los derechos, en particular para el caso de concesin depatentes o de modelos de utilidad.
Siemens AGGrupo AutomatizacinDiv. Sistemas de Automatizacin IndustrialPostfach 4848, D-90327 Nrnberg
Siemens AG 1996Sujeto a cambios sin previo aviso.
Siemens Aktiengesellschaft C79000-G7078-C516
Consignas deseguridad para elusuario
Personal cualificado
Uso conforme
Marca registrada
-
iiiPID ControlC79000-G7078-C516-01
Prlogo
Este manual le asiste durante la utilizacin de los bloques de regulacin de PIDControl.
Su intencin es familiarizarle con el funcionamiento de los bloques de regulacinas como con la llamada del interface de usuario para la parametrizacin de dichosbloques. Para dicho interface de parametrizacin existe una ayuda online que leasiste durante la parametrizacin de los bloques.
Este manual est dirigido a los lectores siguientes:
Programadores de S7
Programadores de funciones de regulacin
Personal operador
Personal de servicio tcnico
PID ControlS7-300/400
Bloques defuncinPID Control
Interface deusuario paraparametrizacinPID Control
ManualelectrnicoPID Control
El paquete de software PID Control comprende las partes siguientes:
los bloques de funcin CONT_C, CONT_S y PULSEGEN;
el interface de usuario para parametrizar la configuracin de los bloques deregulacin;
el manual consagrado en esencia a describir los bloques de funcin.
Finalidad delmanual
Destinatarios
Posicionamientoen el entorno deproductosPID Control
-
ivPID Control
C79000-G7078-C516-01
da una visin general de PID ControlCap. 1
muestra cmo llamar el interface de usuario para parametrizacinCap. 2
describe los bloques de funcin FB 41 CONT_C, FB 42 CONT_Sy FB 43 PULSEGEN
Cap. 3
Este manual est concebido como obra de referencia para las informacionesrelativas a PID Control. Para informaciones que desborden este marco, consultar losmanuales /70/, /71/, /100/, /101/, /231/, /232/, /234/, /352/.
Para las cuestiones relativas a la utilizacin y el empleo de PID Control, contactarcon su interlocutor SIMATIC en la agencia o delegacin Siemens competente parasu sector.Las direcciones de stas pueden encontrarse, por ejemplo, en el anexoSIEMENS enel mundo del manual Autmata programable S7-400, Configuracin e instalacinde un S7-400.
Para cuestiones y observaciones relativas al propio manual, rogamos rellenar elformulario que se encuentra al final del mismo y enviarlo a la direccin indicada.Con la misma ocasin, rogamos indicar en dicho formulario tambin su apreciacinpersonal de este manual.
Nosotros tambin organizamos una serie de cursos para facilitar la introduccin enel sistema de automatizacin SIMATIC S7. Para ello, contactar con los centros deformacin regionales de Siemens o con el Trainingscenter central enD-90327 Nrnberg,Tel. ++49 911 985 3154.
Contenidodel manual
Informacionescomplementarias
Asistenciacomplementaria
Prlogo
-
vPID ControlC79000-G7078-C516-01
Indice
1 Introduccin 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Parametrizacin 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Bloques de funcin 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Regulacin continua con el FB 41 CONT_C 3-2. . . . . . . . . . . . . . . . . . . . . . . . 3.2 Regulacin discontinua con el FB 42 CONT_S 3-9. . . . . . . . . . . . . . . . . . . . . 3.3 Formacin de impulsos con el FB 43 PULSEGEN 3-15. . . . . . . . . . . . . . . . . . 3.4 Ejemplo con el bloque PULSEGEN 3-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Bibliografa A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Indice alfabtico Indice-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
-
viPID Control
C79000-G7078-C516-01
-
1-1PID ControlC79000-G7078-C516-01
Introduccin
Los bloques de funcin (FB) de PID Control (Regulacin PID) comprenden losbloques para regulacin continua (CONT_C) y para regulacin discontinua(CONT_S) as como el bloque para la modulacin de ancho de impulsos(PULSEGEN).Los bloques de regulacin suponen una regulacin meramente software, es decir, unbloque contiene todas las funciones del regulador. Los datos necesarios para elclculo cclico estn almacenados en los bloques de datos asociados. De esta formaes posible llamar varias veces los FB.
El FB PULSEGEN se combina con el bloque FB CONT_C para obtener unregulador con salida de impulsos para atacar actuadores proporcionales.
Un regulador realizado por medio de los FB se compone de una serie de funcionesparciales parametrizables por el usuario. Adems del regulador con su algoritmoPID, los FB incluyen funciones de acondicionamiento de valor de consigna, de valorreal as como de la magnitud manipulada calculada.
Una regulacin creada con los dos bloques mencionados es neutra, por principio, encuanto a sus posibles aplicaciones. El rendimiento de regulacin y con ello lavelocidad de procesamiento dependen nicamente de la potencia de la CPUutilizada.Para una CPU dada, es necesario encontrar un compromiso entre el nmero dereguladores y la frecuencia de procesamiento de cada uno de ellos. Cuanto msrpidos sean los lazos de regulacin, es decir deban calcularse con mayor frecuencialas magnitudes manipuladas por unidad de tiempo, menor es el nmero dereguladores instalables.Existen restricciones relativas al tipo de proceso a regular. Los bloques de funcinse aplican a sistemas inerciales (temperaturas, niveles de llenado, etc.) as como asistemas muy rpidos (caudal, velocidad de rotacin, etc.).
Nota
El comportamiento esttico (ganancia) y las propiedades dinmicas (retardo, tiempomuerto, constante de integracin, etc.) del sistema o proceso regulado ejerce unainfluencia decisiva sobre el diseo del regulador y el dimensionamiento de susparmetros estticos (accin P) y dinmicos (acciones I y D).Por ello es indispensable conocer exactamente el tipo y las caractersticas delsistema o proceso regulado.
Concepto dePID Control
Funciones bsicas
Aplicacin
Anlisis delprocesoregulado
1
-
1-2PID Control
C79000-G7078-C516-01
Nota
Es practicamente imposible influenciar las propiedades de los sistemas o procesosregulados porque resultan de datos mecnicos y de ingeniera qumica. La eleccindel tipo de regulador ms apropiado al sistema o proceso regulado y su adaptacinal comportamiento temporal de este ltimo son los nicos medios de obtener unbuen resultado de regulacin.
Para crear una regulacin, de la fase de estructuracin a su llamada por el programa,pasando por su parametrizacin, puede prescindirse prcticamente de labores deprogramacin. Sin embargo, se precisan conocimientos de STEP 7.
La ayuda online de STEP 7 ofrece tambin informaciones sobre los diferentesbloques de funcin.
PID Control es un subconjunto de la Regulacin estndar. Ms informacin sobre laRegulacin estndar figura en el manual /350/ (disponible en alemn o ingls).
Seleccin delregulador
Creacin
Ayuda online
Informacionessuplementarias
Introduccin
-
2-1PID ControlC79000-G7078-C516-01
Parametrizacin
Bajo Windows 95, el interface de usuario de parametrizacin de PID Control sellama con la secuencia de comandos siguiente:
Inicio SIMATIC STEP 7 V3 Parametrizar Regulacin PIDEn la primera pantalla es posible bien abrir un DB de instancia ya existente yasociado al FB 41 CONT_C FB 42 CONT_S , o crear un nuevo bloque DB encalidad de DB de instancia. Si se desea crear un nuevo DB de instancia, el sistemapregunta a qu FB desea asociarlo.
El FB 43 PULSEGEN no dispone de interface de usuario para parametrizacin.Sus parmetros deben definirse con los medios de STEP 7.
Nota
El interface de usuario para la parametrizacin de PID Control (Regulacin PID)sirve tambin para parametrizar la Regulacin integrada de la CPU 314 IFM. Paraello, crear DBs de instancia para asociar al (S)FB 41 42.
El interface de usuario para parametrizacin dispone de una ayuda integrada que leasiste durante la parametrizacin de los bloques de regulacin. Existen lasposibilidades siguientes de llamar la ayuda online:
por el comando Ayuda Temas de Ayuda...
pulsando la tecla F1
pulsando el botn de ayuda en las diferentes pantallas de parametrizacin
Llamada delinterface deparametrizacin
Ayuda integrada
2
-
2-2PID Control
C79000-G7078-C516-01
Parametrierung
-
3-1PID ControlC79000-G7078-C516-01
Bloques de funcin
Nota
Los FB 41 ... 43 descritos en este captulo slo estn validados para las CPU S7/C7que disponen del nivel de procesamiento de alarmas cclicas:
Apartado Tema Pgina3.1 Regulacin continua con el FB 41 CONT_C 3-23.2 Regulacin discontinua con el FB 42 CONT_S 3-93.3 Formacin de impulsos con el FB 43 PULSEGEN 3-153.4 Ejemplo con el bloque PULSEGEN3-24 3-24
Indice delcaptulo
3
-
3-2PID Control
C79000-G7078-C516-01
3.1 Regulacin continua con el FB 41 CONT_C
El FB CONT_C sirve para la regulacin de procesos industriales con magnitudesde entrada y salida continuas utilizando sistemas de automatizacin SIMATIC S7.Mediante la parametrizacin es posible conectar o desconectar las funcionesparciales del regulador PID, adaptndolo as al proceso regulado.
El regulador puede aplicarse como regulador PID de consigna fija, autnomo otambin en regulaciones de varios lazos como regulador en cascada, regulador demezcla o regulador de relacin. Su modo de trabajo se basa en el algoritmo deregulacin PID del regulador muestreado con seal de salida analgica,complementada dado el caso por una etapa de formacin de impulsos para lacreacin de seales de salida con modulacin de ancho de impulsos pararegulaciones de dos o tres puntos con actuadores proporcionales.
Junto a las funciones en las ramas de valores de consigna y real, el FB realiza unregulador PID completo con salida continua de magnitud manipulada y posibilidadde influenciar manualmente el valor manipulado.A continuacin se describen las funciones parciales:
Rama de valor de consignaEl valor de consigna se introduce en la entrada SP_INT en formato en comaflotante.
Rama de valor realEl valor real puede ser ledo en formato de periferia y en formato en coma flotante.La funcin CRP_IN transforma el valor de periferia PV_PER en un formato encoma flotante de -100 ... +100 %, segn la frmula siguiente:
Salida de CPR_IN = PV_PER 100
27648
La funcin PV_NORM normaliza la salida de CRP_IN segn la frmula siguiente:
Salida de PV_NORM = (salida de CPR_IN) PV_FAC + PV_OFF
El valor por defecto de PV_FAC es 1 y el de PV_OFF es 0.
Formacin del error de regulacinLa diferencia entre el valor de consigna y el valor real es la diferencia o error deregulacin. Para suprimir la pequea oscilacin permanente debida a la cuantifica-cin de la magnitud manipulada (p. ej. en una modulacin de ancho de impulsos conPULSEGEN), el error de regulacin se conduce por una zona muerta(DEADBAND). Cuando DEADB_W = 0, la zona muerta est desconectada.Algoritmo PIDEl algoritmo PID trabaja en el algoritmo de posicin. Las acciones proporcional,integral (INT) y derivativa (DIF) estn conectadas en paralelo y pueden conectarse ydesconectarse individualmente. De esta forma pueden parametrizarse reguladores P,PI, PD y PID. Pero tambin son posibles reguladores I puros.
Introduccin
Aplicacin
Descripcin
Bloques de funcin
-
3-3PID ControlC79000-G7078-C516-01
Procesamiento de valores manualesEs posible conmutar entre modo manual y modo automtico. En el modo manual, lamagnitud manipulada sigue a un valor ajustado manualmente.El integrador (INT) se pone internamente a LMN - LMN_P - DISV y eldiferenciador (DIF) se pone a 0 y se compensa internamente. La conmutacin almodo automtico se efecta as sin choques.
Procesamiento de valores manipuladosEl valor manipulado se limita con la funcin LMNLIMIT a valores prefijables. Lasuperacin de los lmites por parte de la magnitud de entrada se sealiza mediantebits al efecto.La funcin LMN_NORM normaliza la salida de LMNLIMIT segn la frmulasiguiente:
LMN = (Salida de LMNLIMIT) LMN_FAC + LMN_OFF
El valor por defecto de LMN_FAC es 1 y el de LMN_OFF es 0.
El valor manipulado est tambin disponible en formato de periferia. La funcinCRP_OUT transforma el valor en coma flotante LMN en un valor de periferia segnla frmula siguiente:
LMN_PER = LMN 10027648
Aplicacin de magnitud perturbadora (control anticipativo)En la entrada DISV puede aplicarse aditivamente una magnitud perturbadora.
Rearranque completo / Rearranque
El FB CONT_C dispone de una rutina de rearranque completo que se ejecutacuando el parmetro de entrada COM_RST = TRUE.
Al arrancar, el integrador se ajusta internamente al valor de inicializacin I_ITVAL.Si se llama en un nivel de alarma cclica, contina trabajando a partir de este valor.Todas las dems salidas se ponen a sus valores por defecto.
No se emplea la palabra de informacin de error RET_VAL.
Estadosoperativos
Informacionesde error
Bloques de funcin
-
3-4PID Control
C79000-G7078-C516-01
PV_PER
SP_INT
CRP_IN
%
PV_NORM
DEADBANDPV_IN
PV_FAC,PV_OFF
PVPER_ON
-
+
PV
DEADB_W
X
GAIN
ER
0
1
INT
DIF
+ +
TI, INT_HOLD,I_ITL_ON,I_ITLVAL
TD, TM_LAG
P_SELLMN_P
I_SEL DISV
LMN_I
LMN_DD_SEL
0
1
0
1
0
1
0
1 LMNLIMIT
QLMN_HLMQLMN_LLM LMN
LMN_PER
CRP_OUT
%
LMN_NORM
MANMAN_ON
LMN_HLM,LMN_LLM
LMN_FAC,LMN_OFF
0.0
0.0
0.0
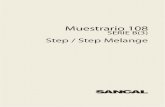
Figura 3-1 Esquema de bloques de CONT_C
Esquema debloques
Bloques de funcin
-
3-5PID ControlC79000-G7078-C516-01
La tabla 3-1 contiene los parmetros de entrada del FB 41 CONT_C.
Tabla 3-1 Parmetros de entrada (INPUT) FB 41 CONT_C
ParmetroTipode
datos
Valoresposibles
Pordefecto Descripcin
COM_RST BOOL FALSECOMPLETE RESTART / Rearranque completoEl bloque tiene una rutina de rearranque completo que se ejecuta cuandoest activada la entrada Rearranque completo.
MAN_ON BOOL TRUEMANUAL VALUE ON / Conectar modo manualSi est activada la entrada Conectar modo manual, est interrumpido ellazo de regulacin. Como valor manipulado se fuerza un valor manual.
PVPER_ON BOOL FALSE
PROCESS VARIABLE PERIPHERY ON / Conectar valor real deperiferiaSi debe leerse el valor real de la periferia, conectar la entrada PV_PERcon la periferia y activar la entrada Conectar valor real de periferia.
P_SEL BOOL TRUE
PROPORTIONAL ACTION ON / Conectar accin PEn el algoritmo PID pueden conectarse y desconectarse individualmentelas acciones PID. La accin P est conectada si est activada la entradaConectar accin P.
I_SEL BOOL TRUE
INTEGRAL ACTION ON / Conectar accin IEn el algoritmo PID pueden conectarse y desconectarse individualmentelas acciones PID. La accin I est conectada si est activada la entradaConectar accin I.
INT_HOLD BOOL FALSEINTEGRAL ACTION HOLD / Congelar accin ILa salida del integrador puede congelarse. Para ello se ha de activar laentrada Congelar accin I.
I_ITL_ON BOOL FALSEINITIALIZATION OF THE INTEGRAL ACTION / Inicializar accin ILa salida del integrador puede inicializarse a la entrada I_ITLVAL. Paraello se ha de activar la entrada Inicializar accin I.
D_SEL BOOL FALSE
DERIVATIVE ACTION ON / Conectar accin DEn el algoritmo PID pueden conectarse y desconectarse individualmentelas acciones PID. La accin D est conectada si est activada la entradaConectar accin D.
CYCLE TIME >= 1ms T#1sSAMPLE TIME / Tiempo de muestreoEl tiempo entre las llamadas del bloque debe ser constante. La entradaTiempo de muestreo indica el tiempo entre las llamadas del bloque.
SP_INT REAL
-100.0...100.0 (%)
magnitudfsica 1)
0.0INTERNAL SETPOINT / Consigna internaLa entrada Consigna interna sirve para ajustar un valor de consigna.
PV_IN REAL
-100.0...100.0 (%)
magnitudfisica 1)
0.0
PROCESS VARIABLE IN / Entrada de valor realEn la entrada Entrada de valor real puede parametrizarse un valor depuesta en servicio, o aplicarse un valor real externo en formato en comaflotante.
Parmetros deentrada
Bloques de funcin
-
3-6PID Control
C79000-G7078-C516-01
Tabla 3-1 Parmetros de entrada (INPUT) FB 41 CONT_C, continuacin
Parmetro DescripcinPordefectoValoresposibles
Tipode
datos
PV_PER WORDW#16#00
00
PROCESS VARIABLE PERIPHERY / Valor real de periferiaEl valor real en formato de periferia se aplica al regulador en la entradaValor real de periferia.
MAN REAL
-100.0...100.0 (%)
magnitudfisica 2)
0.0MANUAL VALUE / Valor manualLa entrada Valor manual sirve para establecer un valor manualmediante funcin de manejo/visualizacin (interface hombre mquina).
GAIN REAL 2.0PROPORTIONAL GAIN / Ganancia proporcionalLa entrada Ganancia proporcional indica la ganancia del regulador.
TI TIME >= CYCLE T#20sRESET TIME / Tiempo de accin integralLa entrada Tiempo de accin integral determina el comportamientotemporal del integrador.
TD TIME >= CYCLE T#10sDERIVATIVE TIME / Tiempo de diferenciacin (accin derivativa)La entrada Tiempo de diferenciacin determina el comportamientotemporal del diferenciador.
TM_LAG TIME >= CYCLE/2 T#2s
TIME LAG OF THE DERIVATIVE ACTION / Tiempo de retardo de laaccin DEl algoritmo de la accin D contiene un retardo que puede parametrizarseen la entrada Tiempo de retardo de la accin D.
DEADB_W REAL>= 0.0 (%) magnitud
fisica 1)0.0
DEAD BAND WIDTH / Ancho de zona muertaEl error de regulacin se conduce por una zona muerta. La entradaAncho de zona muerta determina el tamao de la zona muerta.
LMN_HLM REAL
LMN_LLM...100.0 (%) magnitud
fisica 2)100.0
MANIPULATED VALUE HIGH LIMIT / Lmite superior del valormanipuladoEl valor manipulado tiene siempre un lmite superior y uno inferior. Laentrada Lmite superior del valor manipulado indica el lmite superior.
LMN_LLM REAL
-100.0...LMN_HLM
(%) magnitud
fisica 2)
0.0
MANIPULATED VALUE LOW LIMIT / Lmite inferior del valormanipuladoEl valor manipulado tiene siempre un lmite superior y uno inferior. Laentrada Valor manipulado, lmite inferior indica el lmite inferior.
PV_FAC REAL 1.0PROCESS VARIABLE FACTOR / Factor de valor realLa entrada Factor de valor real se multiplica por el valor real. Laentrada sirve para la adaptacin del margen de valor real.
PV_OFF REAL 0.0PROCESS VARIABLE OFFSET / Offset del valor realLa entrada Offset del valor real se suma con el valor real. La entradasirve para la adaptacin del margen de valor real.
LMN_FAC REAL 1.0
MANIPULATED VALUE FACTOR / Factor del valor manipuladoLa entrada Factor del valor manipulado se multiplica por el valormanipulado. La entrada sirve para la adaptacin del margen de valormanipulado.
Bloques de funcin
-
3-7PID ControlC79000-G7078-C516-01
Tabla 3-1 Parmetros de entrada (INPUT) FB 41 CONT_C, continuacin
Parmetro DescripcinPordefectoValoresposibles
Tipode
datos
LMN_OFF REAL 0.0MANIPULATED VALUE OFFSET / Offset del valor manipuladoLa entrada Offset del valor manipulado se suma al valor manipulado.La entrada sirve para la adaptacin del margen de valor manipulado.
I_ITLVAL REAL
-100.0...100.0 (%)
magnitudfisica 2)
0.0
INITIALIZATION VALUE OF THE INTEGRAL ACTION / Valor deinicializacin de la accin ILa salida del integrador puede forzarse con la entrada I_ITL_ON. En laentrada Valor de inicializacin de la accin I est el valor deinicializacin.
DISV REAL
-100.0...100.0 (%)
magnitudfisica 2)
0.0DISTURBANCE VARIABLE / Magnitud perturbadoraPara control anticipativo de la magnitud perturbadora, sta se conecta enla entrada Magnitud perturbadora.
1) Parmetros en las ramas de valor de consigna y de valor real con la misma unidad2) Parmetros en la rama de valor manipulado con la misma unidad
La tabla 3-2 contiene los parmetros de salida del FB 41 CONT_C.
Tabla 3-2 Parmetros de salida (OUTPUT) FB 41 CONT_C
Parmetro Tipo dedatosValoresposibles Por defecto Descripcin
LMN REAL 0.0 MANIPULATED VALUE / Valor manipuladoEn la salida Valor manipulado se saca en formato en coma flotanteel valor manipulado que acta efectivamente.
LMN_PER WORD W#16#0000 MANIPULATED VALUE PERIPHERY / Valor manipulado periferiaEsta salida entrega el valor manipulado en formato de periferia.
QLMN_HLM BOOL FALSE HIGH LIMIT OF MANIPULATED VALUE REACHED /Alcanzado el lmite superior del valor manipuladoEl valor manipulado tiene siempre un lmite superior y un lmiteinferior. La salida Alcanzado el lmite superior del valormanipulado indica la superacin de la limitacin superior.
QLMN_LLM BOOL FALSE LOW LIMIT OF MANIPULATED VALUE REACHED /Alcanzado el lmite inferior del valor manipuladoEl valor manipulado tiene siempre un lmite superior y un lmiteinferior. La salida Alcanzado el lmite inferior del valor manipuladoindica la superacin de la limitacin inferior.
LMN_P REAL 0.0 PROPORTIONALITY COMPONENT / Accin PLa salida Accin P contiene la componente proporcional de lamagnitud manipulada.
Parmetros desalida
Bloques de funcin
-
3-8PID Control
C79000-G7078-C516-01
Tabla 3-2 Parmetros de salida (OUTPUT) FB 41 CONT_C, continuacin
Parmetro DescripcinPor defectoValoresposiblesTipo dedatos
LMN_I REAL 0.0 INTEGRAL COMPONENT / Accin ILa salida Accin I contiene la componente integral de la magnitudmanipulada.
LMN_D REAL 0.0 DERIVATIVE COMPONENT / Accin DLa salida Accin D contiene la componente diferencial de lamagnitud manipulada.
PV REAL 0.0 PROCESS VARIABLE / Valor realPor la salida Valor real se emite el valor real que actaefectivamente.
ER REAL 0.0 ERROR SIGNAL / Error de regulacinPor la salida Error de regulacin se emite la diferencia o error deregulacin que acta efectivamente.
Bloques de funcin
-
3-9PID ControlC79000-G7078-C516-01
3.2 Regulacin discontinua con el FB 42 CONT_S
El FB CONT_S sirve para la regulacin de procesos tcnicos con seales desalida de valor manipulado binarias para actuadores de accin integral utilizandosistemas de automatizacin SIMATIC S7. A travs de la parametrizacin puedenconectarse o desconectarse funciones parciales del regulador discontinua PI,adaptndolo as al proceso regulado.
El regulador puede aplicarse como regulador de valor fijo PI, autnomo o en lazosde regulacin subordinados en regulaciones de cascada, regulaciones de mezcla oregulaciones de relacin, pero no como regulador piloto. Su modo de trabajo se basaen el algoritmo de regulacin PI del regulador muestreado y es completado con loselementos funcionales para la generacin de la seal de salida binaria a partir de laseal manipulada analgica.
Junto a las funciones en la rama de valor real, el FB realiza un regulador PI termi-nado con salida binaria de valor manipulado y posibilidades de influir manualmentesobre ste. El regulador discontinua trabaja sin respuesta (reenvo) de posicin.A continuacin se expone la descripcin de las funciones parciales:
Rama de valor de consignaEl valor de consigna se introduce en la entrada SP_INT en formato en comaflotante.
Rama de valor realEl valor real puede ser ledo en formato de periferia y en formato en coma flotante.La funcin CRP_IN transforma el valor de periferia PV_PER en un formato encoma flotante de -100 ... +100 %, segn la frmula siguiente:
Salida de CPR_IN = PV_PER 100
27648
La funcin PV_NORM normaliza la salida de CRP_IN segn la frmula siguiente:
Salida de PV_NORM = (Salida de CPR_IN) PV_FAC + PV_OFF
El valor por defecto de PV_FAC es 1 y el de PV_OFF es 0.
Formacin del error de regulacinLa diferencia entre el valor de consigna y el valor real es la diferencia o error deregulacin. Para suprimir la pequea oscilacin permanente debida a la cuantifica-cin de la magnitud manipulada (resolucin limitada del valor manipulado por lavlvula de control), el error de regulacin se conduce por una zona muerta(DEADBAND). Cuando DEADB_W = 0, la zona muerta est desconectada.
Introduccin
Aplicacin
Descripcin
Bloques de funcin
-
3-10PID Control
C79000-G7078-C516-01
Algoritmo discontinuo PIEl FB trabaja sin respuesta (reenvo) de posicin. La accin I del algoritmo PI y larespuesta imaginaria de posicin se calculan en un integrador (INT) y se comparancomo valor de retorno con la accin P restante. La diferencia pasa a un elemento detres puntos (THREE_ST) y a un formador de impulsos (PULSEOUT), que forma losimpulsos para la vlvula de control. A travs de una adaptacin del umbral derespuesta del elemento de tres puntos se reduce la frecuencia de conmutacin delregulador.
Aplicacin de magnitud perturbadora (control anticipativo)En la entrada DISV puede aplicarse aditivamente una magnitud perturbadora.
Rearranque completo / Rearranque
El FB CONT_S dispone de una rutina de rearranque completo que se ejecutacuando est puesto el parmetro de entrada COM_RST = TRUE.
Todas las salidas se ponen a sus valores por defecto.
No se emplea la palabra de informacin de error RET_VAL.
Estadosoperativos
Informacionesde error
Bloques de funcin
-
3-11PID ControlC79000-G7078-C516-01
+
PV_PER
SP_INT
CRP_IN
%
PV_NORM
DEADBANDPV_IN
PV_FACPV_OFF
PVPER_ON
+
PV
DEADB_W
X
GAIN
ER
0
1
THREE_ST
INTLMNR_SIM
LMNS_ON
LMNUPLMNDN
PULSEOUT
AND
AND
AND
AND
LMNR_HSLMNR_LS
QLMNDN
QLMNUP
100.00.0
-100.00.0
1/MTR_TM X
INT
LMNLIMIT
OR
10.0
+
0.0
LMNS_ON
0
1
0
1
0
0
1
1
0X
1/TI
1
0
+
DISV
-
adaptivo
LMNRS_ON,LMNRSVAL
100.0 , 0.0
MTR_TM PULSE_TM,BREAK_TM
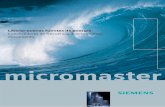
Figura 3-2 Esquema de bloques de CONT_S
Esquema debloques
Bloques de funcin
-
3-12PID Control
C79000-G7078-C516-01
La tabla 3-3 contiene los parmetros de entrada del FB 42 CONT_S.
Tabla 3-3 Parmetros de entrada (INPUT) FB 42 CONT_S
Parmetro Tipo dedatosValoresposibles Por defecto Descripcin
COM_RST BOOL FALSE COMPLETE RESTART / Rearranque completoEl bloque tiene una rutina de rearranque completo que se ejecutacuando est activada la entrada Rearranque completo.
LMNR_HS BOOL FALSE HIGH LIMIT SIGNAL OF REPEATED MANIPULATED VALUE /Seal de lmite superior de la respuesta de posicinLa seal Vlvula de control en el tope superior se conecta en laentrada Seal de lmite superior de la respuesta de posicin.LMNR_HS=TRUE significa: la vlvula de control se encuentra enel tope superior.
LMNR_LS BOOL FALSE LOW LIMIT SIGNAL OF REPEATED MANIPULATED VALUE /Seal de lmite inferior de la respuesta de posicinLa seal Vlvula de control en el tope inferior se conecta en laentrada Seal de lmite inferior de la respuesta de posicin.LMNR_LS=TRUE significa: la vlvula de control se encuentra en eltope inferior.
LMNS_ON BOOL TRUE MANIPULATED SIGNALS ON / Conectar modo manual de lasseales manipuladasEn la entrada Conectar modo manual en seales manipuladas sepasa a modo manual el procesamiento de seal de valor manipulado.
LMNUP BOOL FALSE MANIPULATED SIGNALS UP / Subir seal manipuladaEn el modo manual, esta entrada Subir seal manipulada sirvepara forzar la seal de salida QLMNUP.
LMNDN BOOL FALSE MANIPULATED SIGNALS DOWN / Bajar seal manipuladaEn el modo manual, esta entrada Bajar seal manipulada sirvepara forzar la seal de salida QLMNDN.
PVPER_ON BOOL FALSE PROCESS VARIABLE PERIPHERY ON / Conectar valor real deperiferiaPara leer el valor real de la periferia, debe conectarse la entradaPV_PER con la periferia y se ha de activar la entrada Conectarvalor real de periferia.
CYCLE TIME >= 1ms T#1s SAMPLE TIME / Tiempo de muestreoEl tiempo entre las llamadas de bloque debe ser constante. Laentrada Tiempo de muestreo indica el tiempo entre las llamadas debloque.
SP_INT REAL -100.0...100.0(%)
magnitudfisica 1)
0.0 INTERNAL SETPOINT / Consigna internaLa entrada Consigna interna sirve para fijar un valor de consigna.
Parmetros deentrada
Bloques de funcin
-
3-13PID ControlC79000-G7078-C516-01
Tabla 3-3 Parmetros de entrada (INPUT) FB 42 CONT_S, continuacin
Parmetro DescripcinPor defectoValoresposiblesTipo dedatos
PV_IN REAL -100.0...100.0(%)
magnitudfisica 1)
0.0 PROCESS VARIABLE IN / Entrada de valor realEn la entrada Entrada de valor real puede parametrizarse un valorde puesta en servicio o aplicarse un valor real externo en formato encoma flotante.
PV_PER WORD W#16#0000 PROCESS VARIABLE PERIPHERY / Valor real de periferiaEl valor real en formato de periferia se aplica al regulador en laentrada Valor real de periferia.
GAIN REAL 2.0 PROPORTIONAL GAIN / Ganancia proporcionalLa entrada Ganancia proporcional indica la ganancia delregulador.
TI TIME >= CYCLE T#20s RESET TIME / Tiempo de accin integralLa entrada Tiempo de accin integral determina elcomportamiento temporal del integrador.
DEADB_W REAL 0.0...100.0(%)
magnitudfisica 1)
1.0 DEAD BAND WIDTH / Ancho de zona muertaEl error de regulacin se conduce a travs de una zona muerta. Laentrada Ancho de zona muerta determina el tamao de la zonamuert
PV_FAC REAL 1.0 PROCESS VARIABLE FACTOR / Factor de valor realLa entrada Factor de valor real se multiplica por el valor real. Laentrada sirve para la adaptacin del rea de valor real.
PV_OFF REAL 0.0 PROCESS VARIABLE OFFSET / Offset de valor realLa entrada Offset de valor real se suma al valor real. La entradasirve para la adaptacin del rea de valor real.
PULSE_TM TIME >= CYCLE T#3s MINIMUM PULSE TIME / Duracin mnima de impulsoEn el parmetro Duracin mnima de impulso puedeparametrizarse una longitud de impulso mnima.
BREAK_TM
TIME >= CYCLE T#3s MINIMUM BREAK TIME / Duracin mnima de pausaEn el parmetro Duracin mnima de pausa puede parametrizarseuna longitud de pausa mnima.
MTR_TM TIME >= CYCLE T#30s MOTOR MANIPULATED VALUE / Valor manipulado del motorEn el parmetro Valor manipulado del motor se consigna eltiempo de desplazamiento de la vlvula de control de tope a tope.
DISV REAL -100.0...100.0(%)
magnitudfisica 2)
0.0 DISTURBANCE VARIABLE / Magnitud perturbadoraPara el control anticipativo de magnitud perturbadora se conecta lamagnitud perturbadora en la entrada Magnitud perturbadora.
1) Parmetros en las ramas de valor de consigna y valor real con la misma unidad2) Parmetros en la rama de valor manipulado con la misma unidad
Bloques de funcin
-
3-14PID Control
C79000-G7078-C516-01
La tabla 3-4 contiene los parmetros de salida del FB 42 CONT_S.
Tabla 3-4 Parmetros de salida (OUTPUT) FB 42 CONT_S
Parmetro Tipo dedatosValoresposibles Por defecto Descripcin
QLMNUP BOOL FALSE MANIPULATED SIGNAL UP / Subir seal manipuladaEstando activada la salida Subir seal manipulada, debe abrirse lavlvula de control.
QLMNDN BOOL FALSE MANIPULATED SIGNAL DOWN / Bajar seal manipuladaEstando puesta la salida Bajar seal manipulada, debe cerrarse lavlvula de control.
PV REAL 0.0 PROCESS VARIABLE / Valor realEn la salida Valor real se emite el valor real que actaefectivamente.
ER REAL 0.0 ERROR SIGNAL / Error de regulacinEn la salida Error de regulacin se emite la diferencia o error deregulacin que acta efectivamente.
Parmetros desalida
Bloques de funcin
-
3-15PID ControlC79000-G7078-C516-01
3.3 Formacin de impulsos con el FB 43 PULSEGEN
El FB PULSEGEN sirve para construir un regulador PID con salida de impulsospara gobernar actuadores proporcionales.
El FB PULSEGEN permite realizar reguladores PID de dos o de tres puntos consalida con modulacin de ancho de impulsos. Este bloque de funcin se aplica casisiempre en combinacin con el regulador continuo CONT_C.
LMN
PULSEGENINV
CONT_C
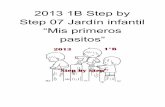
PULSEGEN transforma la magnitud de entrada INV (= LMN del regulador PID)por modulacin del ancho de impulsos en un tren de impulsos de perodo constante,que corresponde al tiempo de ciclo con el que se actualiza la magnitud de entrada yque debe parametrizarse en PER_TM.
La duracin de un impulso por perodo es proporcional a la magnitud de entrada.Aqu, el ciclo parametrizado mediante PER_TM no es idntico al tiempo deprocesamiento del FB PULSEGEN. Por el contrario, un ciclo PER_TM secompone de varios ciclos de procesamiento del FB PULSEGEN donde la cantidadde llamadas del FB PULSEGEN por cada ciclo PER_TM representa una medidade la precisin de la modulacin del ancho de impulsos.
t
INV
QPOS_P
(LMN)
0
50
100
1
0 t
PER_TM
30
50
80
Ciclo PULSEGEN(= ciclo CONT_C)
Figura 3-3 Modulacin de ancho de impulsos
Introduccin
Aplicacin
Descripcin
Bloques de funcin
-
3-16PID Control
C79000-G7078-C516-01
Una magnitud de entrada del 30 % y 10 llamadas del FB PULSEGEN por cadaPER_TM significan pues:
uno en la salida QPOS para las primeras tres llamadas delFB PULSEGEN (30 % de 10 llamadas)
uno en la salida QPOS para las tres primeras llamadas delFB PULSEGEN (70% de 10 llamadas)
0
1#
QPOS_P
QNEG_P
MAN_ON
NEG_P_ON
POS_P_ON
INV
SYN_ON,STEP3_ON,ST2BI_ON
PER_TM,P_B_TM,
RATIOFAC
Figura 3-4 Esquema de bloques de PULSEGEN
En este ejemplo, una relacin de muestreo de 1:10 (llamadas de CONT_Crespecto a llamadas PULSEGEN) limita la precisin del valor manipulado al 10 %;es decir, los valores de entrada INV solamente pueden representarse en pasos del10% en un ancho de impulsos en la salida QPOS.Correspondientemente, la precisin aumenta con la cantidad de llamadas delFB PULSEGEN por cada llamada del CONT_C.As, p. ej., si se llama PULSEGEN 100 veces ms que CONT_C, se consigue unaresolucin del 1 % del margen de valor manipulado.
Nota
La relacin entre frecuencias de llamada debe ser programada por el usuario.
Existe la posibilidad de sincronizar automticamente la salida de impulsos con elbloque que actualiza la magnitud de entrada INV (p.ej. CONT_C). De esta formaqueda garantizado que una variacin de la magnitud de entrada se traduzca con lamxima rapidez en un impulso a la salida.El formador de impulsos evala siempre la magnitud de entrada INV a intervaloscorrespondientes al perodo PER_TM, y transforma el valor en una seal de impulsodel ancho correspondiente.
Esquema debloques
Precisin del valormanipulado
Sincronizacinautomtica
Bloques de funcin
-
3-17PID ControlC79000-G7078-C516-01
Pero como INV se calcula casi siempre en un nivel de alarma cclica ms lento, elformador de impulsos debera comenzar lo ms rpidamente posible despus de laactualizacin de INV a transformar el valor discreto en un impulso.
Para ello, el bloque puede sincronizar l mismo el arranque del perodo segn elsiguiente procedimiento:Si ha variado INV y la llamada de bloque no se encuentra en el primer ciclo dellamada o en los dos ltimos ciclos de un perodo, tiene lugar una sincronizacin. Elancho de impulsos se calcula de nuevo y la salida se pone a 1 en el siguiente cicloque constituye al mismo tiempo el inicio de un nuevo perodo (fig. 3-5).
t
0
t
LMN = INV = 30.0 LMN = INV = 80.0 LMN = INV = 50.0
PER_TM PER_TM
00 0 01 1 0 0 11 1 11 1 1 11 0 0 11. . . .
. . . .
CYCLE de CONT_CArranque del
perodo
Procesamiento de CONT_C
CYCL dePULSEGEN Sincronizacin del
arranque del perodo
PULSEGEN reconoce que INV hacambiado y que la llamada no seencuentra en el primer ciclo o enlos dos ltimos ciclos del perodo
PULSEGEN reconoce que INV hacambiado a 80.0 50.0 y que la lla-mada se encuentra en el primer ciclo oen los dos ltimos ciclos del perodo
Sincronizacin nonecesaria
Procesamiento de PULSEGEN Procesamiento de PULSEGEN en el primer ciclo o en los dos ltimosciclos del perodo
Figura 3-5 Sincronizacin del arranque del perodo
La sincronizacin automtica puede desconectarse en la entrada SYN_ON(= FALSE).
Nota
Una vez efectuada la sincronizacin, el valor antiguo de INV (es decir de LMN) serefleja con ms o menos precisin en la seal de impulso, debido al comienzo de unnuevo perodo.
Bloques de funcin
-
3-18PID Control
C79000-G7078-C516-01
Segn la parametrizacin del formador de impulsos, es posible configurar losreguladores PID con accin de tres puntos, con salida de dos puntos bipolar ounipolar. La tabla siguiente muestra cmo posicionar los conmutadores para obtenerlos diferentes modos:
Modo de operacinConmutador MAN_ON STEP3_ON ST2BI_ON
Regulacin de tres puntos FALSE TRUE cualquieraRegulacin de dos puntos con margen devalor manipulado bipolar (-100 % ... 100 %)
FALSE FALSE TRUE
Regulacin de dos puntos con margen devalor manipulado unipolar (0 % ... 100 %)
FALSE FALSE FALSE
Modo manual TRUE cualquiera cualquiera
En el modo de operacin Regulacin de tres puntos pueden generarse tres estadosde la seal manipulada. Para ello se asignan los valores de estado de las sealesbinarias de salida QPOS_P y QNEG_P a los correspondientes estados operativos delactuador. La tabla muestra el ejemplo de una regulacin de temperatura:
Seal de salidaActuador Calentar OFF Enfriar
QPOS_P TRUE FALSE FALSEQNEG_P FALSE FALSE TRUE
A partir de la magnitud de entrada se calcula la duracin del impulso mediante unacaracterstica. La forma de esta caracterstica est definida por la duracin mnimade impulso o duracin mnima de pausa y por el factor de relacin (v. fig. 3-6).El valor normal del factor de relacin es 1.Los codos de la caracterstica son originados por la duracin mnima de impulso ypor la duracin mnima de pausa.
Duracin mnima de impulso y duracin mnima de pausaUna parametrizacin correcta de la duracin mnima de impulsos y de la duracinmnima de pausas P_B_TM puede evitar conmutaciones frecuentes de conexin ydesconexin que afectan a la vida til de contactos y elementos finales de control(actuadores).
Nota
Se suprimen valores absolutos pequeos de la magnitud de entrada LMN quepudieran generar una duracin de impulso menor que P_B_TM. Los valores deentrada elevados que generaran una duracin de impulso mayor que(PER_TM - P_B_TM) se igualan a 100 % o a -100 %.
La duracin de los impulsos positivos o negativos se calcula multiplicando lamagnitud de entrada (en %) por el perodo:
100INV
PER_TMDuracin de impulso =
Modos deoperacin
Regulacin detres puntos
Bloques de funcin
-
3-19PID ControlC79000-G7078-C516-01
-100 %
100 %
PER_TMPER_TM - P_B_TM
P_B_TM
Duracin delimpulso positivo
OFFpermanente
ONpermanente
Duracin delimpulso negativo
Figura 3-6 Caracterstica simtrica del regulador de tres puntos (factor de relacin = 1)
El factor de relacin RATIOFAC permite modificar la relacin de la duracin deimpulsos positivos respecto a los negativos. En un proceso trmico es posible conello p. ej. considerar constantes de tiempo diferentes para el calentamiento y elenfriamiento.El factor de relacin influye tambin sobre la duracin mnima de impulso y dura-cin mnima de pausa. Un factor de relacin < 1 significa que el valor umbral paraimpulsos negativos se multiplica por el factor de relacin.
Factor de relacin < 1La duracin de impulso a la salida de impulso negativo calculada multiplicando lamagnitud de entrada por el perodo se reduce en el factor de relacin (v. fig. 3-7).
Duracin de impulso positivo =100INV
PER_TM
Duracin de impulso negativo =100INV
PER_TM RATIOFAC
Regulacin de trespuntos asimtrica
Bloques de funcin
-
3-20PID Control
C79000-G7078-C516-01
-100 %
100 %
PER_TMPER_TM - P_B_TM
P_B_TM
0.5 * PER_TM0.5 * (PER_TM - P_B_TM)0.5 * P_B_TM
Duracin del impulsopositivo
Duracin del impulsonegativa
Figura 3-7 Caracterstica asimtrica del regulador de tres puntos (factor de relacin = 0.5)
Factor de relacin > 1La duracin de impulso a la salida de impulso positivo calculada multiplicando lamagnitud de entrada por el perodo se reduce en el factor de relacin.
Duracin de impulso negativo =100INV
PER_TM
INV PER_TM RATIOFAC
Duracin de impulso positivo = 100
En la regulacin de dos puntos se conecta nicamente la salida de impulso positivaQPOS_P de PULSEGEN con el correspondiente actuador todo/nada (ON/OFF).Segn sea el modo parametrizado, el regulador de dos puntos tiene un margen devalor manipulado bipolar o un margen unipolar (v. figs. 3-8 y 3-9).
Regulacin de dos puntos con margen de valor manipulado bipolar(-100 % ... 100 %)
-100.0 % 100.0 %
PER_TMPER_TM - P_B_TM
P_B_TM
0.0 %
Duracin del impulso positivo
OFFpermanente
ON permanente
Figura 3-8 Caracterstica con margen de valor manipulado bipolar (-100 % ... 100 %)
Regulacin dedos puntos
Bloques de funcin
-
3-21PID ControlC79000-G7078-C516-01
Regulacin de dos puntos con margen de valor manipulado unipolar(0 % ... 100 %)
100.0 %
PER_TMPER_TM - P_B_TM
P_B_TM
0.0 %
Duracin del impulso positivo
Figura 3-9 Caracterstica con margen de valor manipulado unipolar (0 % ... 100 %)
QNEG_P suministra la seal de salida negada, si la conexin del regulador de dospuntos en el lazo de regulacin exige una seal binaria invertida lgicamente paralos impulsos de la seal manipulada.
ActuadorImpulso
ON OFF
QPOS_P TRUE FALSEQNEG_P FALSE TRUE
En modo manual (MAN_ON = TRUE) las salidas binarias del regulador de trespuntos o dos puntos pueden forzarse a travs de las seales POS_P_ON yNEG_P_ON con independencia de INV.
POS_P_ON NEG_P_ON QPOS_P QNEG_PRegulacin de tres puntos FALSE FALSE FALSE FALSE
TRUE FALSE TRUE FALSE
FALSE TRUE FALSE TRUE
TRUE TRUE FALSE FALSE
Regulacin de dos puntos FALSE cualquiera FALSE TRUE
TRUE cualquiera TRUE FALSE
Rearranque completo / RearranqueEn caso de rearranque completo se ponen a cero todas las salidas de seal.
El bloque no efecta ninguna verificacin de error interna. No se utiliza la palabraindicadora de error RET_VAL.
Modo manual enregulacin de doso de tres puntos
Estadosoperativos
Informacionesde error
Bloques de funcin
-
3-22PID Control
C79000-G7078-C516-01
Tabla 3-5 Parmetros de entrada (INPUT) FB 43 PULSEGEN
ParmetroTipode
datos
Valoresposibles
Pordefecto Descripcin
INV REAL -100.0...100.0 (%) 0.0 INPUT VARIABLE / Variable de entradaEn el parmetro de entrada Variable de entrada se aplica unamagnitud de valor manipulado analgica.
PER_TM TIME >=20*CYCLE T#1s PERIOD TIME / PerodoEn el parmetro Perodo se introduce la duracin de perodoconstante de la modulacin de ancho de impulsos. La duracincorresponde al tiempo de muestreo del regulador. La relacin entreel tiempo de muestreo del formador de impulsos respecto al tiempode muestreo del regulador determina la precisin de la modulacindel ancho de impulsos.
P_B_TM TIME >= CYCLE T#0ms MINIMUM PULSE/BREAK TIME / Duracin mnima de impulsoo duracin mnima de pausaEn el parmetro Duracin mnima de impulso o duracin mnimade pausa puede parametrizarse una longitud mnima de impulso ode pausa.
RATIOFAC REAL 0.1 ...10.0 1.0 RATIO FACTOR / Factor de relacinEste parmetro permite modificar la relacin de la duracin deimpulsos negativos a impulsos positivos. En un proceso trmico,esto permite compensar diferentes constantes de tiempo paracalentar y enfriar (por ejemplo, con calefaccin elctrica orefrigeracin por agua).
STEP3_ON BOOL TRUE THREE STEP CONTROL ON / Conectar regulacin de tres puntosEn el parmetro de entrada Conectar regulacin de tres puntos seactiva el correspondiente modo de operacin. En la regulacin detres puntos trabajan ambas seales de salida.
ST2BI_ON BOOL FALSE TWO STEP CONTROL FOR BIPOLAR MANIPULATEDVALUE RANGE ON / Conectar regulacin de dos puntos paramargen de valores manipulados bipolarEn el parmetro Conectar regulacin de dos puntos para margen devalores manipulados bipolar puede seleccionarse entre los modosde operacin Regulacin de dos puntos para margen de valoresmanipulados bipolar y Regulacin de dos puntos para margen devalores manipulados unipolar. Debe ser aquSTEP3_ON = FALSE.
MAN_ON BOOL FALSE MANUAL MODE ON / Conectar modo manualActivando el parmetro de entrada Conectar modo manual esposible forzar a mano las seales de salida.
POS_P_ON BOOL FALSE POSITIVE MODE ON / Impulso positivo ONEn modo manual de una regulacin de tres puntos, el parmetro deentrada Impulso positivo ON permite forzar la seal de salidaQPOS_P. En modo manual de una regulacin de dos puntos,QNEG_P est siempre invertida respecto a QPOS_P.
NEG_P_ON BOOL FALSE NEGATIVE PULSE ON / Impulso negativo ONEn modo manual de una regulacin de tres puntos, el parmetro deentrada Impulso negativo ON permite forzar la seal de salidaQNEG_P. En modo manual de una regulacin de dos puntos,QNEG_P est siempre invertida respecto a QPOS_P.
Parmetros deentrada
Bloques de funcin
-
3-23PID ControlC79000-G7078-C516-01
Tabla 3-5 Parmetros de entrada (INPUT) FB 43 PULSEGEN, continuacin
Parmetro DescripcinPordefectoValoresposibles
Tipode
datos
SYN_ON BOOL TRUE SYNCHRONISATION ON / Conectar sincronizacinActivando el parmetro de entrada Conectar sincronizacin, esposible sincronizar automticamente la salida de impulsos con elbloque que actualiza la magnitud de entrada INV. De esta formaqueda garantizado que una magnitud de entrada cambiante salgatambin lo ms rpidamente posible como impulso.
COM_RST BOOL FALSE COMPLETE RESTART / Rearranque completoEl bloque tiene una rutina de rearranque completo que se ejecutacuando est activada la entrada Rearranque completo.
CYCLE TIME >= 1ms T#10ms SAMPLE TIME / Tiempo de muestreoEl tiempo entre las llamadas de bloque debe ser constante. Laentrada Tiempo de muestreo indica el tiempo entre las llamadas debloque.
Nota
Los valores de los parmetros de entrada no se limitan en el bloque; no tiene lugaruna comprobacin de los parmetros.
Tabla 3-6 Parmetros de salida (OUTPUT) FB 43 PULSEGEN
ParmetroTipode
datos
Valoresposibles
Pordefecto Descripcin
QPOS_P BOOL FALSE OUTPUT POSITIVE PULSE / Seal de salida de impulso positivoEl parmetro de salida Seal de salida de impulso positivo est activadocuando debe emitirse un impulso. En la regulacin de tres puntos es elimpulso positivo. En la regulacin de dos puntos, QNEG_P est siempreinvertida respecto a QPOS_P.
QNEG_P BOOL FALSE OUTPUT NEGATIVE PULSE / Seal de salida de impulso negativoEl parmetro de salida Seal de salida, impulso negativo est activadocuando debe emitirse un impulso. En la regulacin de tres puntos es elimpulso negativo. En la regulacin de dos puntos, QNEG_P est siempreinvertida respecto a QPOS_P.
Parmetros desalida
Bloques de funcin
-
3-24PID Control
C79000-G7078-C516-01
3.4 Ejemplo con el bloque PULSEGEN
El bloque de regulacin continua CONT_C y el formador de impulsos PULSEGENpermiten realizar un regulador de consigna fija con salida de impulsos para gobernaractuadores de accin proporcional. La figura 3-10 muestra el diagrama de principiodel bucle de regulacin
Sistema oproceso consalida deimpulsos
PULSEGENCONT_C
LMN
PV_PER
INV QPOS_PQNEG_P
Figura 3-10 Lazo de regulacin
El regulador continuo CONT_C suministra el valor manipulado LMN que esconvertido por el formador de impulsos PULSEGEN en una seal de impulsos conciclo de trabajo variable QPOS_P QNEG_P.
El regulador de valor de consigna fija con salida de impulsos para actuadoresproporcionales PULS_CTR se compone de los bloques CONT_C y PULSEGEN. Lallamada de bloques est gestionada de la forma siguiente. CONT_C se llama cada2 s (=CYCLE*RED_FAC); PULSEGEN se llama cada 10 ms (=CYCLE). El tiempode ciclo del OB35 est ajustado a 10 ms. La interconexin est representada en lafigura 3-11.
En caso de rearranque, el bloque PULS_CTR se llama en el OB100 y la entradaCOM_RST se posiciona en TRUE.
Lazo de regulacin
Llamada delbloque einterconexin
Bloques de funcin
-
3-25PID ControlC79000-G7078-C516-01
OB 100 (Rearranque)OB 35 (10ms)
TRUE (OB 100)FALSE (OB35)
T#10ms200
PULS_CTR, DPULS_CTRFB 50, DB 50
PULS_CTR, DPULS_CTRFB 50, DB 50
COM_RSTCYCLERED_FAC
COM_RST
CYCLE
RED_FAC
SP_INT
PV_PER
COM_RSTCYCLE
COM_RSTCYCLE
PER_TM
INV
QPOS_PSP_INTPV_PER
LMN
QPOS_P
Llamada CONT_C con unaperiodicidad x RED_FAC
Figura 3-11 Llamada de bloques e interconexin
Tabla 3-7 FB PULS_CTR
Direccin Declaracin Nombre Tipo Comentario0.0 in SP_INT REAL Consigna4.0 in PV_PER WORD Valor real de periferia6.0 in RED_FAC INT Factor de reduccin de llamada8.0 in COM_RST BOOL Rearranque10.0 in CYCLE TIME Tiempo de muestreo14.0 out QPOS_P BOOL Seal manipulada16.0 stat DI_CONT_C FB-CONT_C Contador142.0 stat DI_PULSEGEN FB-PULSEGEN Contador176.0 stat sCount INT Contador0.0 temp tCycCtr TIME Tiempo de muestreo del regulador
Programa AWL delFB PULS_CTR
Bloques de funcin
-
3-26PID Control
C79000-G7078-C516-01
Tabla 3-8 Segmento 1
AWL Explicacin
U #COM_RSTSPBN M001L 0T #sCount
//Rutina de rearranque
M001: L #CYCLEL #RED_FAC*DT #tCycCtr
//Clculo del tiempo de muestreo del regulador
L #sCountL 1-IT #sCountL 0
-
A-1PID ControlC79000-G7078-C516-01
Bibliografa
/70/ Manual: Autmata programable S7-300, Configuracin, instalacin y datos de las CPU
/71/ Manual de referencia: Sistemas de automatizacin S7-300 y M7-300 Datos de los mdulos
/100/ Manual: Sistemas de automatizacin S7-400, M7-400, Configuracin e instalacin
/101/ Manual de referencia: Sistemas de automatizacin S7-400, M7-400 Datos de los mdulos
/231/ Manual del usuario: Software estndar para SIMATIC S7 y M7,STEP 7
/232/ Manual: AWL para SIMATIC S7-300/400, Programacin de bloques
/234/ Manual de programacin: Software de sistema para SIMATIC S7-300/400Diseo de programas
/350/ Manual del usuario: SIMATIC 7, Control estndar (slo en ingls)
/352/ J. Giler, M. Schmid: Vom Proze zur Regelung. Analyse, Entwurf, Realisie-rung in der Praxis. Siemens AG. ISBN 3-8009-1551-0. (libro tcnico en alemn)
A
-
A-2PID Control
C79000-G7078-C516-01
-
Indice-1PID ControlC79000-G7078-C516-01
Indice alfabtico
AAnlisis del proceso regulado, 1-1Aplicacin, 1-1Ayuda integrada, 2-1Ayuda online, 1-2
CCONT_C, 3-2CONT_S, 3-9CPU 314 IFM, 2-1
FFormacin de impulsos, 3-15
IInterface de parametrizacin
ayuda integrada, 2-1llamada, 2-1
MModulacin de ancho de impulsos, 1-1
PPID Control, concepto, 1-1PULSEGEN, 3-15
RRegulacin
continua, 1-1continua con el SFB 41, 3-2discontinua, 1-1discontinua con el SFB 42, 3-9integrada, 2-1
SSeleccin del regulador, 1-2SFB 41 CONT_C, 3-2
esquema de bloques, 3-4SFB 42 CONT_S, 3-9
esquema de bloques, 3-11SFB 43 PULSEGEN, 3-15
esquema de bloques, 3-16regulacin de dos puntos, 3-20regulacin de tres puntos, 3-18regulacin de tres puntos asimtrica, 3-19sincronizacin automtica, 3-16
-
Indice-2PID Control
C79000-G7078-C516-01
Indic
-
1PID ControlC79000-G7078-C516-01 $
Remitente:Nombre: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _Cargo: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _Empresa: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _Calle: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _Cdigo postal: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _Poblacin: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _Pas: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _Telfono: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Indique el ramo de la industria al que pertenece:
r Industria del automvilr Industria qumicar Industria elctricar Industria alimentariar Control e instrumentacinr Industria mecnicar Industria petroqumica
r Industria farmacuticar Industria del plsticor Industria papelerar Industria textilr Transportesr Otros _ _ _ _ _ _ _ _ _ _ _
Siemens AGAUT E 146
stliche Rheinbrckenstr. 50D-76181 KarlsruheR.F.A.
-
2PID Control
C79000-G7078-C516-01
En las lneas siguientes puede exponer los problemas concretos que se le hayan planteadoal manejar el manual:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Observaciones/sugerenciasSus observaciones y sugerencias nos permiten mejorar la calidad y utilidad de nuestradocumentacin. Por ello le rogamos que rellene el presente formulario y lo envie aSiemens.
Responda por favor a las siguientes preguntas dando una puntuacin comprendida entre1 = muy bien y 5 = muy mal
1. Corresponde el contenido del manual a sus exigencias ?2. Resulta fcil localizar las informaciones requeridas ?3. Es comprensible el texto ?4. Corresponde el nivel de los detalles tcnicos a sus exigencias ?5. Qu opina de la calidad de las ilustraciones y tablas ?
Software estndar para S7-300/400 PID Control (Regulacin PID)PrlogoIndice1 Introduccin2 Parametrizacin3 Bloques de funcin3.1 Regulacin continua con el FB 41 CONT_C3.2 Regulacin discontinua con el FB 42 CONT_S3.3 Formacin de impulsos con el FB 43 PULSEGEN3.4 Ejemplo con el bloque PULSEGEN
A BibliografaIndice alfabticoACFIMPRS