Sistemas dinamicos en nudos
53
UNIVERSIDAD AUT ´ ONOMA DE SAN LUIS POTOS ´ I Facultad de Ciencias Nudos en Sistemas Din´ amicos. TESIS que para obtener el t´ ıtulo de Licenciado en Matem´ aticas PRESENTA: Claudio Alejandro Garc´ ıa Grimaldo Director de tesis: Dr. Hugo Cabrera Ibarra. Abril del 2015. San Luis Potos´ ı, S.L.P., M´ exico
-
Upload
claudio-garcia-grimaldi -
Category
Documents
-
view
49 -
download
4
description
Nudos representados por medio de ecuaciones diferenciales
Transcript of Sistemas dinamicos en nudos
-
UNIVERSIDAD AUTONOMADE SAN LUIS POTOSI
Facultad de Ciencias
Nudos en Sistemas Dinamicos.
TESIS
que para obtener el ttulo de
Licenciado en Matematicas
P R E S E N T A:
Claudio Alejandro Garca Grimaldo
Director de tesis:
Dr. Hugo Cabrera Ibarra.
Abril del 2015. San Luis Potos, S.L.P., Mexico
-
2
-
Indice general
1. Objetivo 5
1.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Preliminares 7
2.1. Teora de nudos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1. Definiciones basicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2. Nudos anfiqueirales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.3. Nudos dociles vs. nudos salvajes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.4. Suma conexa de nudos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.5. Enlaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.6. Diagramas regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.7. Invariantes de nudos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.8. Numero de enlace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2. Trenzas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1. Presentacion de Bn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3. Relacion entre nudos y trenzas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3. Sistemas dinamicos 25
3.1. Clasificacion de los sistemas dinamicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2. Existencia y unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3. Estabilidad de los sistemas dinamicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4. Sistemas dinamicos para trenzas 29
4.1. Funciones C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2. Representacion de trenzas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5. Solucion Numerica del Sistema Dinamico 33
5.1. Creacion de una cuerda. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2. Creacion de dos cuerdas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6. Sistema de EDOS para representacion de nudos 49
6.1. Representacion de un enlace doble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7. Conclusiones 51
8.Bibliografa 51
3
-
4 INDICE GENERAL
-
Captulo 1
Objetivo
El objetivo principal de esta tesis es la construccion de un sistema dinamico representado como un conjunto
de ecuaciones diferenciales ordinarias, las que para ciertas condiciones iniciales tengan como solucion un nudo
en R3. Para resolver este sistema se usaran metodos numericos implementados por medio del software Octave;dicha solucion se vera de manera grafica como un nudo en R3. Se llevara a cabo esto ultimo estableciendoprimero un sistema de ecuaciones diferenciales ordinarias que contenga a alguna cuerda de una trenza. Despues
se obtendra un unico sistema de ecuaciones que sera usado para construir un nuevo sistema dinamico definido
en todo R3 el cual bajo ciertas condiciones iniciales tendra como solucion a una trenza. Por ultimo se buscaransoluciones periodicas; esto con el fin de obtener la cerradura de una trenza que sera equivalente a un nudo
en R3.Para obtener de forma explcita las ecuaciones diferenciales que conformaran el sistema dinamico y en el cual
esten contenidas las trenzas, usaremos un tipo particular de funciones, las cuales nos permitiran construir un
tubo-vecindad en cada cuerda que componga a la trenza de tal suerte que se eviten intersecciones entre las
cuerdas que la conforman.
En la Figura 1.1 se puede observar la cerradura de una trenza
Figura 1.1: Cerradura de una trenza
1.1. Introduccion
Como se menciono en la seccion anterior se pretende encontrar una relacion entre los sistemas dinamicos y los
nudos, entonces la idea clave que permitira encontrar dicha relacion es la siguiente:
Una orbita cerrada (periodica) descrita en un flujo tridimensional es un embebimiento del crculo S1 dentro
de una 3-variedad el cual constituye el estado fase del sistema; de esta manera las soluciones periodicas del
sistema dinamico pueden estar anudadas. Es ampliamente conocido el hecho que un nudo puede ser expresado
5
-
6 CAPITULO 1. OBJETIVO
en terminos de cerradura de trenzas; a partir de este hecho, nuestro objetivo es expresar de forma general
y explcita trenzas por medio de un sistema de ecuaciones diferenciales ordinarias en un intervalo de tiempo
finito, posteriormente al hacer la solucion periodica, dada una condicion inicial particular obtendremos el nudo
deseado.
Para lograr el objetivo (representar trenzas por medio de un sistema dinamico), se usaran funciones de clase
C (i.e funciones que son infinitamente diferenciables), las cuales nos permitiran realizar el giro necesariopara que cada componente de la trenza se exprese, como se muestra en la Figura 1.2.
Con esto se encontrara que cualquier trenza esta dada por la ecuacion siguiente
Figura 1.2: Grafica de la funcion
x =i
fi(x, y, z)
y =i
gi(x, y, z)
z = c
Donde c es una constante y f g son funciones de clase C cuyo valor es igual a 1 en algun intervalo (, a) ycon valor 0 en otro intervalo (b,) , con a < b. Dado el conjunto de ecuaciones diferenciales ordinarias men-cionadas anteriormente, se definira el sistema dinamico como la suma sucesiva de funciones C (combinadasde una manera adecuada dependiendo de la trenza que queramos representar). Para poder expresar algun
nudo en terminos de cerradura de una trenza, en las siguientes secciones se proporcionara un algoritmo que
nos posibilite cumplir la finalidad planteada. En el Captulo 4 describiremos la idea general de como lograr
un sistema dinamico que nos permita obtener trenzas; por ultimo en la Captulo 5 y 6 se mostrara de manera
general como usar los tubos-vecindad para crear un solo sistema dinamico, el cual exhibira por completo a la
trenza, la que se empleara para cerrar dichas trenzas y obtener el nudo pretendido.
-
Captulo 2
Preliminares
2.1. Teora de nudos
2.1.1. Definiciones basicas
En esta seccion abordaremos los conceptos elementales de la teora de nudos, los cuales junto con los conceptos
de trenzas y sistemas dinamicos seran la base sobre la que se desarrollara el tema de la presente tesis. Para
un estudio minucioso de estas definiciones se pueden consultar la Seccion 3.1 y el Captulo 4.
Definicion. El subconjunto K R3 es un nudo si existe un homeomorfismo del crculo unitario S1 en R3cuya imagen es K. Donde S1 es el conjunto de puntos (x , y , 0) en el plano que satisface la ecuacion x2+y2 = 1.
En la Figura 2.1 se puede ver ejemplos de nudos.
Figura 2.1: Ejemplos de nudos
El nudo mas sencillo es la circunferencia estandar S1 vista en R3, es decir, el conjunto de puntos:
{(x, y, 0) R3 |x2 + y2 = 1}.A este nudo se le nombra el nudo trivial, el cual carece de anudamientos (Figura 2.2).
Notese que en la definicion de nudo, mencionada en el primer parrafo de este apartado, la cuestion no se reduce
a ver cuando dos nudos K1 y K2 son homeomorfos ya que todos son homeomorfos a S1 y en consecuencia
homeomorfos entre s.
Con esto se puede observar que la propiedad de estar anudado, no es una propiedad topologica intrnseca del
7
-
8 CAPITULO 2. PRELIMINARES
Figura 2.2: El nudo trivial
espacio formado por los puntos del nudo, sino que mas bien se relaciona a la forma en que este se encaja en
R3. Con base en esto daremos la definicion de cuando dos nudos son similares.Definicion. Dos nudos K1 y K2 son semejantes si existe un homeomorfismo
h : R3 R3 tal que h (K1) = K2.
Por ejemplo, en la Figura 2.3 los nudos (a) y (b) son semejantes, as comolos nudos (c), (d), (e) y (f). Para
ver que (c) y (d) son semejantes, colocamos uno encima del otro y ponemos un espejo en medio.
Sin embargo, la experiencia fsica nos dice que el trebol dextrogiro y levogiro no son iguales, es decir, si los
Figura 2.3: Algunas equivalencias de nudos.
construimos con un pedazo de cuerda no podemos transformar uno en el otro, unicamente podremos hacerlo
mediante el uso de un espejo. Esto nos dice que nuestra definicion de nudos semejantes no corresponde con
la idea fsica que tenemos de que dos nudos sean iguales, por lo que tenemos que buscar una definicion mas
adecuada. Veamos que es lo que falla en nuestra definicion de semejanza. Todo homeomorfismo h de R3 ens mismo preserva la orientacion o invierte la orientacion; h invierte la orientacion si transforma una referencia
dextrogira (Figura 2.4) de R3 en una referencia levogira y preserva la orientacion si la deja igual.El concepto fsico de igualdad de nudos corresponde a mover continuamente un nudo en R3 hasta poder
obtener el otro, lo cual se lleva a cabo mediante homeomorfismos. La definicion de semejanza no corresponde
al concepto fsico puesto que no se puede transformar una referencia dextrogira en una levogira si se emplea
unicamente homeomorfismos que preserven la orientacion (isotopas). Por lo tanto se necesita dar una nueva
definicion que este mas acorde con el concepto fsico de que dos nudos son iguales.
Definicion. Dos nudos K1 y K2 son equivalentes si existe un homeomorfismo h : R3 R3 que preserve la
-
2.1. TEORIA DE NUDOS 9
Figura 2.4: Referencias dextrogira y levogira.
orientacion tal que h (K1) = K2. Tal equivalencia se denotara por K1 = K2.
2.1.2. Nudos anfiqueirales
Dada la discusion anterior, la experiencia fsica nos dice que los treboles dextrogiro y levogiro no son equi-
valentes, sin embargo existen nudos que s lo son a su imagen en el espejo; un ejemplo de esto lo podemos
encontrar en elnudo 8, el nudo 8 dextrogiro se puede transformar en el nudo 8 levogiro como el que se muestra
en la figura 2.5. Dado lo anterior damos la siguiente definicion.
Definicion. Un nudo K es anfiqueiral si existe un homeomorfismo que invierte la orientacion:
h : R3 R3 y que cumple que h(K) = K.
Figura 2.5: Equivalencia del nudo 8 dextrogiro y el nudo 8 levogiro.
2.1.3. Nudos dociles vs. nudos salvajes
En el presente trabajo de tesis se restringira el estudio a una clase de nudos, los nudos dociles, los que
posteriormente se representaran mediante un sistema dinamico1. A continuacion se otorga la definicion de esta
clase de nudos.
1Una definicion precisa sobre esto se desarrolla en en el captulo 4
-
10 CAPITULO 2. PRELIMINARES
Definicion. Un nudo poligonal es aquel formado por una union finita de segmentos de recta llamados aristas
cuyos puntos extremos son los vertices del nudo. Un nudo es docil si es equivalente a uno poligonal. Los nudos
que no son dociles se llaman salvajes.
Los ejemplos anteriores que se han presentado, son nudos dociles, en la Figura 2.6 se da un ejemplo de lo que
es un nudo salvaje.
Figura 2.6: Ejemplo de un nudo salvaje
De este punto en adelante al momento de hablar de nudos se hara referencia solo a nudos dociles.
2.1.4. Suma conexa de nudos
Dados dos nudos orientados K1 y K2 se puede definir una operacion entre ellos que permita crear un nuevo
nudo, a este mecanismo se le nombrara la suma conexa de los nudos K1 y K2, la que se denotara por
K1 #K2. Este nuevo nudo creado por medio de la suma conexa se obtiene al suprimir un intervalo en cada
nudo presente en la suma conexa para despues insertarlos a lo largo de este intervalo, de tal forma que las
orientaciones coincidan como lo muestra la Figura 2.7. Se dice que un nudo es nudo primo si no puede
expresarse como K1 #K2 donde K1 y K2 son nudos no triviales.
Figura 2.7: Suma conexa de dos nudos
La suma conexa satisface las siguientes propiedades:
1. Esta bien definida salvo equivalencia,i.e. si K1 = K 1 y K2 = K 2 entonces K1 #K2 = K 1 #K 2.2. Es asociativa, es decir cumple K1 #(K2 #K3) = (K1 #K2) #K3.3. Es conmutativa, i.e cumple que K1#K2 = K2 #K1.
-
2.1. TEORIA DE NUDOS 11
En la Figura 2.8 se muestra un ejemplo de la suma conexa de dos nudos.
Figura 2.8: Manera en la que se lleva a cabo la suma conexa de dos nudos.
2.1.5. Enlaces
Definicion. Un enlace es una coleccion ordenada finita de nudos entre los cuales no hay interseccion alguna.
Cada nudo Ki se dice que es una componente del enlace. En la Figura 2.9 se presentan ejemplos de enlaces.
Figura 2.9: Ejemplos de enlaces: en la Figura (a) se representan los anillos de Boromeo: tres nudos enlazados,
en (b) el nudo trivial, es el unico nudo que compone al enlace
As como existe una manera de saber si dados dos nudos, estos son equivalentes entre s, para los enlaces
tambien existe una forma de saber si dos enlaces son equivalentes.
Definicion. Dos enlaces L = {K1, K2, , Km} y L = {K 1, K 2, , K n} son equivalentes si se satisfacenlas siguientes condiciones:
1. m = n, es decir, L y L tienen el mismo numero de componentes.
2. Existe un homeomorfismo de R3 en s mismo que preserva la orientacion que manda la coleccion K1 Km en la coleccion K 1 K n.
2.1.6. Diagramas regulares
A un nudo generalmente lo especifica una proyeccion, de hecho todos los ejemplos presentados son proyecciones
de los nudos correspondientes.Consideremos la proyeccion paralela dada por
-
12 CAPITULO 2. PRELIMINARES
: R3 R3 (x, y, z) = (x, y, 0).
Si K es un nudo (o enlace) diremos que (K) = K es la proyeccion de K. Ademas, si K tiene asignada una
orientacion, K hereda la orientacion de forma natural, sin embargo, K posee varios puntos de interseccion.
Un punto p de K es llamado punto de de cruce si la imagen inversa 1(p) K contiene mas de un puntode K.
En general, K puede ser muy complicado en cuanto a numero y tipo de puntos de cruce, no obstante es posible
que K sea equivalente a otro nudo cuya proyeccion sea simple. Para un nudo poligonal, las proyecciones mas
simples son las de los nudos que estan en posicion regular.
Figura 2.10: Cruces en una proyeccion regular
Definicion. Un nudo (o enlace) esta en posicion regular si su proyeccion satisface lo siguiente:
1. Los unicos puntos de cruce de K son dobles.
2. Ningun punto doble es la imagen de ningun vertice de K.
La segunda condicion asegura que todo punto doble represente a uno solo de cruce como en la Figura 2.10;
los que son dobles como en 2.10(b) estan prohibidos puesto que existe un vertice en un punto doble, lo cual
viola la condicion.
La proyeccion de un nudo en posicion regular se dice que es una proyeccion regular. Dichas proyecciones
presentan un problema mas por resolver: En un punto doble de una proyeccion regular no es claro si el nudo
pasa por arriba o por abajo de s mismo, para eliminar esta ambiguedad cambiaremos un poco esta imagen
cerca de los puntos de cruce, se hace un esbozo con el afan de que parezca cortada, indicando as que parte
pasa por abajo y cual por arriba. A lo dibujado de esta manera le llamaremos diagrama regular del nudo
K.
En la figura 2.11 (a) se muestra como deber ser un diagrama regular, (b) tambien lo es pero no representa al
mismos nudo de (a), (c) es una forma incorrecta de lo que sera un diagrama regular.
2.1.7. Invariantes de nudos
Un mecanismo para determinar si dados dos nudos son o no equivalentes entre ellos, es buscar alguna propiedad
de los nudos que se mantenga cuando los nudos se deformen y as saber que dichos nudos no son equivalentes.
A esta propiedad se le conoce como invariante de nudos.
En general, un invariante de nudos es una condicion necesaria, esto es:
-
2.1. TEORIA DE NUDOS 13
Figura 2.11: En esta grafica solo (a) muestra un diagrama regular del nudo trebol.
Si dos nudos son equivalentes entonces sus invariantes son iguales.
La condicion de ser suficiente no siempre es cierta, es decir en la mayora de los caso el recproco es falso.
Dicho lo anterior, si dos nudos son iguales en consecuencia sus invariantes son iguales, o equivalentemente si
sus invariantes son distintos entonces los nudos no son iguales. De esta manera encontrar invariantes de nudos
da una forma para saber si dos nudos no son equivalentes.
El primer ejemplo de invariante de nudos que se obtiene inmediatamente de la equivalencia de enlaces, es
el numero de componentes; en el cual si dos enlaces tienen distinto numero de componentes no pueden ser
equivalentes.
En la presente seccion se enunciaran algunos de los invariantes mas usados en la teora de nudos.
Movidas de Reidemeister
Kurt Reidemeister en los anos 20s describio una serie de reglas que permite pasar de un primer diagrama
regular a un segundo diagrama regular sin tener que fijarnos en la transformacion del nudo original. Dichas
reglas se conocen como movidas de Reidemeister. Las movidas de Reidemeister son una util herramienta
que permite, a traves del uso de diagramas regulares, transformar dicho diagrama regular mediante isotopa
en otro nudo equivalente en posicion regular K.
Las movidas de Reidemeister son tres y se conocen como del tipo I, tipo II y tipo III, y se describen como en
la Figura 2.12.
Reidemeister demostro que dos nudos (o enlaces) pueden ser deformados uno en el otro si y solo si sus
diagramas regulares pueden transformarse, usando una sucesion finita de movidas de los tres tipos descritos
en la figura anterior2.
En la Figura 2.13 se presenta un ejemplo de como a traves de movidas de Reidemeister el primer nudo que se
presenta, es equivalente al nudo trebol.
Numero mnimo de cruces
Dado un diagrama regular D de un nudo K el numero de puntos de cruce es finito, a pesar de que este numero
de cruces no determina un invariante de nudos (considere el ejemplo de la Figura 2.14), en cambio se pueden
2Una demostracion de este hecho se puede encontrar en [2]
-
14 CAPITULO 2. PRELIMINARES
Figura 2.12: Movidas de Reidemeister.
Figura 2.13: Equivalencia de nudos mediante movidas de Reidemeister.
considerar todos los diagramas regulares del nudo K y denotar como c (K) el numero mnimo de puntos de
cruce de la coleccion de todos los diagramas de K,
c (K) = min c(D).
Donde D es conjunto de todos los diagramas regulares del nudo K. En este caso, claramente c (K) es un
invariante del nudo K.
2.1.8. Numero de enlace
A continuacion se vera un invariante para enlaces orientados denominado como el numero de enlace,
que pretende medir que tanto dos curvas se enredan una en la otra. En este invariante se asignara el valor +1
o 1 a los puntos de cruce de un diagrama regular orientado con lo que podemos definir la nocion de cruceorientado. Una muestra de estos cruces se puede ver en la Figura 2.15.
Definicion. Sea D el diagrama regular de un enlace con dos componentes L = {K1, K2 }. Sea K1 u K2el conjunto de los puntos de cruce del diagrama D en donde las imagenes proyectadas de K1 y K2 tienen
interseccion no vaca. Vease que K1uK2 no contiene a los puntos de cruce de las proyecciones de K1 y K2 que
-
2.1. TEORIA DE NUDOS 15
Figura 2.14: Equivalencia de dos nudos triviales por medio de movidas de Reidemeister
Figura 2.15: Diagrama regular de cruces orientados
tienen puntos de auto-interseccion de las componentes del nudo. Se define entonces el numero de enlace de
K1 y K2 por la siguiente ecuacion:
lk (K1, K2) =1
2
pK1uK2
sign(p). (2.1)
Se denota como K2 la componente K2 del enlace L = lk(K1,K2). Con esto se tiene que el numero deenlace depende de la orientacion del diagrama D.
Numero de Coloracion
Definicion. Sea D el diagrama regular de un nudo ( o enlace) K. Se dice que el diagrama D del nudo es
tricoloreable si al colorear los arcos de D con tres colores distintos ( por ejemplo: rojo,amarillo, naranja), se
tiene que en cada uno de los puntos de cruce, se cumple:
1. Estan presentes los tres colores mencionados anteriormente.
2. Aparece solo un color de los citados.
Dado un nudo K, tal que, existe un diagrama regular de K que sea tricoloreable,se puede probar que si se
cumple que todo diagrama regular de cualquier otro nudo tambien lo es, entonces se tiene que ambos nudos
son tricoloreables. Esta propiedad es un invariante de nudos. [2]
Como ejemplo de un nudo tricoloreable tomemos el nudo trebol y representemos su diagrama en la Figura
2.16.
-
16 CAPITULO 2. PRELIMINARES
Figura 2.16: El nudo trebol a la izquuierda de la grafica es tricoloreable, a la derecha el nudo ocho no es
tricoloreable, se necesitan 4 colores distintos para colorearlo
Como se puede observar el nudo trebol es tricoloreable, en la Figura 2.16 se representa el diagrama regular
del nudo 8 el cual no lo es, al ser esta propiedad un invariante de nudos, se tiene que dichos nudos no son
equivalentes.
2.2. Trenzas
A lo largo de esta seccion se daran los conceptos basicos de la Teora de Trenzas.
Definicion.Considerese un cubo B en R3. En la cara superior del cubo B, tomese n puntos A1, A2, , Any los siguientes puntos A1, A
2, , An en la cara inferior del cubo B, como se muestra en la Figura 2.17.
Se define una n-trenza como la coleccion de cuerdas no anudadas tal que cada una inicia y baja en al-
Figura 2.17: Grafica de la reprsentacion de una n-trenza dentro de un cubo
guno de los puntos A1, A2, , An, de la cara superior y finaliza cada una de las cuerdas en algun puntoA1, A
2, , An de la cara inferior del cubo B. Se considera que dos trenzas son equivalentes si una puede ser
deformada en la otra a traves de isotopas que fijan los puntos extremos de las cuerdas.
As como los nudos se pueden representar por diagramas regulares, similarmente se consigue obtener el de una
trenza. El procedimiento para representar una trenza por medio de un diagrama regular es el siguiente:
Los puntos A1, A2, , An se unen de forma directa por segmentos de lneas a los puntos A1, A2, , An.De esta forma se obtiene una trenza particular, llamada la n-trenza trivial,la que se puede ver en la Figura
2.18.
Si se supone que para una n trenza se conectan las cuerdas como sigue: A1 con Ai1 , A2 con Ai2 , , Ancon Ain . Entonces podemos asignar a la trenza la permutacion:
-
2.2. TRENZAS 17
Figura 2.18: Representacion en un diagrama regular de la n-trenza trivial
(1 2 ni1 i2 in
)
A esta permutacion la llamaremos la permutacion de la trenza .
Se puede observar que la permutacion de la n-trenza trivial es la permutacion identidad. Sea Bn el conjunto
de todas las clases de equivalencia de las n-trenzas. Si se toman dos elementos y del conjunto Bn, se puede
definir el producto de dos n-trenzas y . La manera de llevar a cabo esto es la que se describe a continuacion:
Se une la base del cubo que contiene a la trenza con la cara superior del cubo que contiene al trenza , de
esta forma se obtiene un paraleleppedo que contiene una nueva trenza, la que se nombrara como el producto
de las trenzas y , y se denota dicho producto como , vease la Figura 2.19. En general el producto no es
conmutativo, es decir no se cumple que = .
Figura 2.19: Producto de dos trenzas
Bajo este producto el conjunto Bn de trenzas adquiere estructura de grupo. Con la ayuda de los diagramas de
trenzas podemos verificar que el grupo es asociativo, el elemento neutro esta dado por la n- trenza trivial, la
cual se denota por e. Si consideramos la base del cubo que contiene a la trenza como una espejo, entonces
-
18 CAPITULO 2. PRELIMINARES
el reflejo de en dicho espejo sera el inverso de , esto es 1 se observara como en la Figura 2.20.
Figura 2.20: Producto de una trenza por su inverso
Se verifica con estas propiedades que para todo elemento existe un elemento 1 tal que
, 1 que 1 = e = 1.
El grupo que conforma a Bn, sera llamado el grupo de n-trenzas.
2.2.1. Presentacion de Bn
Muchas veces es mas facil definir a un grupo mediante algunos de sus elementos llamados generadores y algunas
relaciones entre ellos. Para que el concepto quede mas claro, veamos un ejemplo.
Sea G el grupo formado por el conjunto 1, a, b y la multiplicacion dada por la tabla de la Figura 2.21.
Figura 2.21: Tabla de los elementos 1, a, b
La tabla anterior, tiene 9 entradas, pero usando el hecho (obtenido de la entrada de en medio) que b = a2,
podemos reducir la informacion necesaria para determinar el grupo diciendo que los elementos del grupo son
1, a y a2 y el hecho de que a3 = 1. As, el grupo en cuestion es descrito mas eficientemente si notamos que
el elemento a genera al grupo, que la ecuacion a3 = 1 es satisfecha y que ninguna de las ecuaciones a2 = 1
o a = 1 se cumple. Lo anterior, se denomina una presentacion del grupo G, dada por el generador a y la
relacion a3 = 1 y esto se denota por
a|a3 = 1.
-
2.2. TRENZAS 19
En general, una presentacion consta de un conjunto de generadores x = {x1, x2, . . .}y un conjunto de relacionesr = {r1, r2, . . .} denotados por
x|r
.
A las combinaciones posibles de los elementos de r, se les llama la consecuencia de r. Por ejemplo, si tenemos
las relaciones r = a3 = 1 , b = a2 entonces ba = 1 es una consecuencia de r.
Un grupo puede tener muchas presentaciones diferentes y una cuestion importante al respecto es saber cuando
dos presentaciones diferentes corresponden al mismo grupo.
Definicion. Decimos que dos presentaciones son equivalentes si corresponden a grupos isomorfos.
Veamos ahora como es la estructura del grupo de trenzas. En primer lugar el grupo de 1-trenzas B1 contiene
solamente un elemento: la 1-trenza trivial. Por lo tanto B1 = e. Para n 2, los grupos Bn son de ordeninfinito, es decir, tienen un numero no finito de elementos. A pesar de esto, existe una manera muy facil de
describir los elementos de Bn dando una presentacion.
Como vimos en el inicio de esta seccion, para dar una presentacion, necesitamos dar la lista de generadores y
las relaciones que satisfacen.
El grupo de n-trenzas Bn tiene n 1 generadores denotados por i(i = 1, . . . , n 1) dados de la siguientemanera: El generador i es la trenza que conecta a Ai con A
i+1, a Ai+1 con A
i (este segundo cruza por
arriba) y conecta los restantes Aj con Aj mediante lineas rectas. En la Figura 2.22 se muestra el diagrama del
generador i y su inverso.
Al multiplicar dichos generadores se obtienen elementos del grupo de trenzas. Recprocamente, todo elemento
Figura 2.22: Diagrama regular de (a) i y (b) 1i
de Bn se expresa como producto de los generadores i y sus inversos 1i . Para ver esto, dividimos el diagrama
regular de una trenza a traves de lineas horizontales paralelas, de tal manera que en cada rectangulo que
obtengamos quede unicamente un punto de cruce. Si dos puntos de cruce estan al mismo nivel, luego si se
mueve uno de ellos un poco hacia arriba y el otro hacia abajo podemos eliminar este problema.
Como un ejemplo, en la Figura 2.23 se muestra que la trenza esta dada por 13 12312 .
Es as que se observa como las n-trenzas i generan al grupo Bn. En el caso de B2, tenemos que hay un solo
generador 1 y por lo tanto, todo elemento de B2 es una potencia de 1 o de su inverso 11 . Por consiguiente
B2 es un grupo cclico infinito, es decir, es isomorfo al grupo de los numeros enteros Z, donde el elemento m1
-
20 CAPITULO 2. PRELIMINARES
Figura 2.23: La trenza como producto de los i
corresponde al entero m. Intuitivamente esto corresponde a que la trenza se tuerza m veces hacia la izquierda
si m es positivo o a la derecha si m es negativo.
Cuando n 3 la descripcion algebraica de un elemento de Bn como producto de las i no es unico. Porejemplo las 4-trenzas 13 y 31 son equivalentes ( vease la Figura 2.24). En consecuencia, en el grupo de
4-trenzas, B4, se satisface la relacion 13 = 31.
Ademas, las 4-trenzas 121 y 212 tambien son equivalentes como lo muestra la Figura 2.25. De ah que
Figura 2.24: Equivalencia entre trezas
tambien se cumple la relacion: 121 = 212 La igualdad tambien se cumple si consideramos n-trenzas
en general (n 3), las cuales son llamadas relaciones de trenzas del grupo Bn. De hecho, si dos n-trenzas sonequivalentes se transforma una en la otra usando varias veces estas igualdades. Con lo anteiror tenemos que
la presentacion de Bn esta dada por:
Bn =
1, . . . , n1 | 1j = j1 (|i j| 2)
ii+1i = i+1ii+1 (i = 1, 2, . . . , n 2)
2.3. Relacion entre nudos y trenzas
Como mencionamos en la introduccion queremos expresar nudos en terminos de trenzas, lo cual se llevara a cabo
representando el nudo a traves de la clausura de una trenza. Para conseguirlo, se definira un sistema dinamico, el
cual tenga como solucion un campo vectorial periodico, el que para condiciones iniciales particulares tendra una
orbita periodica como solucion, la cual contiene el nudo deseado. Se validara la construccion anterior, usando
-
2.3. RELACION ENTRE NUDOS Y TRENZAS 21
Figura 2.25: Relaciones en B4
el Teorema de Alexander, donde se muestra que dado cualquier nudo existe una algoritmo que nos permite
expresarlo como la cerradura de una trenza.
Consideremos una n-trenza y conectemos, respectivamente, los n puntos A1, . . . , An de la tapa superior del
cuadrado donde esta la trenza, con los puntos A1, . . . , An de la base del cuadrado, pero esta vez, mediante
arcos paralelos que estan fuera del cuadrado, como se muestra en la Figura 2.26.
Obtenemos de esta manera el diagrama regular de un nudo o enlace, al cual decimos que es la cerradura de
Figura 2.26: La cerradura de una trenza
la trenza. Usualmente se le asigna una orientacion a cada cuerda de la trenza que comienza desde el punto Ai
y se mueve hacia abajo dentro del cubo de la trenza. Es por esto que a partir de cualquier trenza podemos
obtener un nudo o enlace orientado cerrando la trenza. El recproco tambien es cierto y es conocido como el
Teorema de Alexander.
Teorema 1. Dado un nudo (orientado) K arbitrario, entonces es equivalente (con orientacion) a algunnudo que se ha obtenido a partir de una tranza.
Prueba:
Suponga que D es un diagrama regular orientable de un nudo K. Se lleva a cabo un corte a D en algun punto
-
22 CAPITULO 2. PRELIMINARES
(pero no en un punto de cruce). Jalemos las partes finales este corte, de tal manera que se obtenga ahora un
diagrama regular de T (1, 1) ovillo. Vease la Figura 2.27.Se demuestra a continuacion la manera de transformar este ovillo en una trenza . Notese primero, que el
Figura 2.27: Diagrama regular del nudo
nudo que se obtiene al realizar la cerradura del ovillo K en el diagrama anterior es equivalente a K.
Si el T (1, 1) ovillo tiene un maximo local m, entonces tiene un mnimo local. Si m = 0, entonces T es unatrenza, y la prueba ha finalizado. As que supongamos que m > 0, por lo tanto existe un arco ab en T tal que
se conecta un mnimo local a con un maximo local b. Vease la Figura 2.28 (a).
Ademas supongase que ab tiene interseccion con otras partes del ovillo en n lugares. Se marca n+ 1 puntos
Figura 2.28: Arco en un segmento del ovillo
en el arco ab, i.e., a = a0, a1, . . . , an = b tal que el arco ai, ai+1 tenga interseccion en un solo punto con el
ovillo K, como se observa en Figura 2,28(a).
A continuacion se reemplaza el arco a0, a1 por el arco a0P1P1a1. Vease Figura 2.28 (b). El arco(mas largo)
P1P1 vive fuera del ovilloK y los arcos a0P
1 y a1P1 son seleccionados de tal forma que si a0a1 pasa por
debajo(o arriba) de otro segmento, entonces los arcos a0P1 y a1P1 tambien pasen por abajo (o por arriba) de
todos los otros segmentos. El resultado de las manipulaciones descritas anteriormente seran un 2 ovillo.Se sigue inmediatamente que el nudo (orientado) obtenido al unir (fuera del cuadrado) los 4 puntos de este
2 ovillo por medio de curvas es equivalente al nudo original. Al emplear el mismo metodo con respecto de
-
2.3. RELACION ENTRE NUDOS Y TRENZAS 23
los arcos a1a2, . . . , an1an, eventualmente se formara un (n + 1, n 1) ovilloK que no tiene un maximo,ni un mnimo local en a y b respectivamente y por lo tanto habra a lo mas m 1 maximos y mnimos locales.De esta forma al continuar con este mismo proceso con el resto de los m 1 maximos y mnimos locales, sellegara a un T ovillo que no tiene maximos y mnimos locales. Este T ovillo sera nuestra T trenzabuscada.
Ejemplo. La Figura 2.29 (a) (d)muestra la manera de realizar el procedimiento descrito en el Teorema deAlexander.
Se tiene que si dos trenzas son equivalentes, por consiguiente sus respectivas cerraduras seran equivalentes
Figura 2.29: Uso del teorema de Alexander para pasar de un nudo a un trenza.
como nudos o enlaces. Sin embargo es posible obtener nudos (o enlaces) equivalentes a partir de dos trenzas que
no lo son. Un ejemplo de ello esta dado por la trenza trivial e B1 y el generador 1 B2, cuyas cerradurasnos dan el nudo trivial, a pesar de que la primera es una 1-trenza y la segunda una 2-trenza, de ah que no
son equivalentes. De donde se infiere que, si se pretende aplicar la teora de trenzas a la teora de nudos, se
debe explicar claramente cual es la clase de trenzas cuya cerraduras nos dan nudos equivalentes. Para ello
introduciremos el concepto de M-equivalencia y los movimientos de Markov.
Definicion. Sea B la union de los grupos B1, B2, . . . , Bn, . . . , es decir,
B =k1
Bk
Se Puede aplicar en B las siguientes operaciones llamadas movimientos de Markov:
1. Si es un elemento del grupo de trenzas Bn, entonces M1 es la operacion que transforma a en la
n-trenza 1, donde es algun elemento de Bn, vease la Figura 2.30 (a). Se dice que el elemento1 es el conjugado de .
2. La operacion M2 es la que transforma a una n-trenza en alguna de las dos (n+1)-trenzas n o 1n
donde n es el generador de Bn+1, vease la Figura 2.30 (b).
-
24 CAPITULO 2. PRELIMINARES
Figura 2.30: Movimientos de Markov
Definicion. Sean y dos elementos de B. Si se puede transformar en aplicandose los movimientos deMarkov M1 y M2 y sus inversos M
11 y M
12 un numero finito de veces, entonces se dice que es Markov
equivalente (o simplemente M-equivalente) a y se denota por .El siguiente Teorema muestra que la M-equivalencia es el concepto fundamental que conecta a los nudos y a
las trenzas.
(Teorema de Markov). Sean K1 y K2 dos nudos (o enlaces) orientados, los cuales pueden ser formados a
partir de las trenzas 1 y 2 respectivamente, entonces:
K1 = K2 1 2.
Se tiene por el Teorema de Markov que un nudo (o enlace) K se puede obtener como la cerradura de un
numero infinito de trenzas. Dentro de este conjunto de trenzas existe una trenza con el mnimo numero de
cuerdas. La trenza es llamada la trenza mnima de K y el numero de cuerdas de es el ndice de trenza
de K y es denotado por b(K) y es un invariante de nudos.
-
Captulo 3
Sistemas dinamicos
Los sistemas dinamicos son sistemas cuyos parametros internos (variables de estado) siguen una serie de reglas
temporales. Se denominan sistemas porque estan descritos por un conjunto de ecuaciones (sistema) y dinamicos
ya que sus parametros varan con respecto a alguna variable t, que generalmente es el tiempo. El estudio de
los sistemas dinamicos puede dividirse en 3 areas:
1. Dinamica aplicada: modelado de procesos por medio de ecuaciones de estado que relacionan estados
pasados con estados futuros.
2. Matematicas de la dinamica: se enfoca en el analisis cualitativo del modelo dinamico.
3. Dinamica experimental: experimentos en laboratorio, simulaciones en computadora de modelos dinami-
cos.
En este trabajo se enfocara en el estudio de las matematicas de la dinamica.
3.1. Clasificacion de los sistemas dinamicos
Los sistemas dinamicos se dividen en dos clases: aquellos en los que el tiempo vara continuamente y en los que
transcurre discretamente. Los sistemas dinamicos continuos: Llamados as porque la variable independiente
t cambia de manera continua. Se expresan con ecuaciones diferenciales, las que pueden ser ordinarias, en
derivadas parciales y ecuaciones diferenciales con retrasos. Por otro lado si la variable independiente t, donde
t es el tiempo, es discreto los sistemas se reflejan por medio de ecuaciones de diferencias, tambien conocidas
como mapas iterados. Un sistema dinamico continuo n-dimensional se puede representar por la ecuacion:
x = F (x).
donde x = [x1, x2, , xn] es un vector en Rn y x = d([x1, x2, , xn])dt
.
Un sistema dinamico visto como un sistema de ecuaciones diferenciales ordinarias puede ser de dos categoras:
1. Sistema dinamico autonomo. El sistema se representa por una sistema de ecuaciones diferenciales
ordinarias autonoma ,de la formadx
dt= f(x) en el cual la variable t, no aparece de manera explcita.
Un ejemplo de un sistema autonomo es el siguiente,
x = ax donde x R y a es una constante que toma valores en R. En este ejemplo, en la parte derechade la igualdad, la variable independiente no esta presente, razon por la cual es un sistema dinamico
autonomo.
25
-
26 CAPITULO 3. SISTEMAS DINAMICOS
2. Sistema dinamico no autonomo. Es un sistema donde la variable t aparece de forma explcita en
el sistema de ecuaciones diferenciales ordinarias comodx
dt= f(x, t)donde x U Rn y t R. Como
ejemplo se muestra el siguiente sistema de 2 ecuaciones diferenciales ordinarias:
x = 2xt
y = 3x+ y
3.2. Existencia y unicidad de soluciones
A continuacion, se daran algunos resultados basicos relativos a la existencia y unicidad de sistemas dinamicos
(o de las soluciones de ecuaciones diferenciales ordinarias, si se prefiere). Para ello, se considera un sistema de
ecuaciones no autonomo:
x = f(t, x). (3.1)
donde f(t, x) es continua y lipschitziana en algun abierto U R Rn.En el presente trabajo se usan funciones de clase C; en el siguiente par de proposiciones veremos que dichasfunciones cumplen ser Lipschitz y de esta manera poder usar los teoremas de existencia y unicidad que se
describen posteriormente.
Proposicion. Cualquier funcion con derivada acotada es Lipschitz continua. Sea X un intervalo y sea f :
X R una funcion continua en X, derivable en int(X) y tal que su derivada es acotada. Entonces f esLipschitz continua en X.
Demostracion. Supongamos que existe M 0 tal que
|f (x)| M (3.2)
En seguida se demostrara que f es Lipschitz continua en X y que M es un coeficiente de Lipschitz para f en
X. Sean x1, x2 X. Hay tres casos: x1 < x2, x1 = x2 y x1 > x2. Primero se considera el caso x1 < x2.Aplicando el teorema del valor intermedio a la funcion f en el intervalo [x1, x2], existe un punto c (x1, x2) talque f(x2)f(x1) = f (c)(x2x1). Notemos que c (x1, x2) int(X). Sacando el valor absoluto y aplicandola hipotesis (3.2) obtenemos que |f(x2) f(x1)| = | f (c)|| (x2 x1)| M |(x2 x1)|. El caso (x1 > x2) seconsidera de manera similar (solo se intercambian los papeles de x1 y x2), y en el caso x1 = x2 tenemos que
|f(x2) f(x1| = 0 = M |x2 x1|. Proposicion. Cualquier funcion continuamente diferenciable en un intervalo finito cerrado es Lipschitz con-
tinua. Sea f C1 en [a, b], esto es, f es derivable en [a, b] y f es continua en [a, b]. Entonces f es Lipschitzcontinua en [a, b].
Demostracion. Se sabe que una funcion continua en un intervalo finito y cerrado es acotada. Por consecuen-
cia, f es acotada, y podemos aplicar la proposicion anterior. Una vez establecidas las dos proposiciones anteriores, se procede ha enunciar los siguientes teoremas.
Teorema 1. Sea (t0, x0) U . Entonces existe una solucion de (3.1) que pasa por el punto x0 en t = t0,denotada por x(t, t0, c0), con | t t0| suficientemente pequeno. Esta solucion es unica en el sentido de quecualquier otra solucion de (3.1) que pase por x0 en t = t0 debe ser igual a x(t, t0, x0) en su intervalo de
definicion en comun.
En otros terminos, las orbitas de X coinciden o son disjuntas. Esto es, el abierto U se puede descomponer en
una union disjunta de curvas diferenciables, pudiendo cada una de ellas ser:
-
3.3. ESTABILIDAD DE LOS SISTEMAS DINAMICOS 27
a) Imagen biunvoca de un intervalo de R,b) Un punto, o
c) Difeomorfa a un crculo.
Demostracion Teorema 1. El resultado es consecuencia directa del Teorema de Picard, ver [8]. El Teorema 1 solo garantiza existencia y unicidad para intervalos de tiempo suficientemente pequenos. El
siguiente resultado nos permite extender a aquellos intervalos de existencia de las soluciones.
Teorema 2. Sea C U R Rn, donde C es un abierto. Entonces la solucion x(t, t0, x0) puede ser extendidaunvocamente (en sentido positivo y negativo) en t hasta la frontera de C.
Demostracion Teorema 2 Ver [8] .
3.3. Estabilidad de los sistemas dinamicos
Para visualizar el comportamiento de las variables de estado de un sistema dinamico se puede hacer en forma de
serie de tiempo (grafica de una variable de estado vs. tiempo), o en forma de espacio fase. El espacio fase de un
sistema n-dimensional x = F (x) es el lugar donde todos los posibles estados de un sistema son representados,
cada variable dependiente del sistema se representa como un eje de un espacio multidimensional y cada punto
equivale a cada posible estado de las variables del mismo. En este tipo de representacion el tiempo se vuelve
un parametro implcito.
El espacio fase esta descrito por un campo vectorial. Un campo vectorial en Rn es una funcion que asignaa cada punto en Rn un vector n-dimensional.Se dice que una singularidad (puntos, ciclos o subconjuntos del espacio fase) del espacio fase es estable,
sumidero o atractor si toda trayectoria que comienza cerca de ella se aproxima a tal singularidad conforme el
tiempo transcurre. De hecho si dicha region atrae a todas las trayectorias del espacio fase, recibe el nombre
de atractor global.
Una singularidad del espacio fase es Liapunov-estable si todas las trayectorias que comienzan suficientemente
cercanas a ella se mantienen cercanas a esta durante todo el tiempo.
Por ultimo, una singularidad es inestable, repulsor o fuente cuando no es ni atractor ni Lyapunov-estable, es
decir, las trayectorias que inician cercanas a ella divergen conforme pasa el tiempo.
Las singularidades x para las cuales x = F (x) = 0 son llamadas puntos fijos o crticos; en estos puntos el
campo vectorial que determina la direccion de las trayectorias en el espacio fase es nulo.
-
28 CAPITULO 3. SISTEMAS DINAMICOS
-
Captulo 4
Sistemas dinamicos para trenzas
La finalidad de este captulo es establecer un conjunto de sistemas dinamicos los cuales contendran como
solucion a alguna trenza, en la que la clausura sea equivalente a algun nudo (como se establecio en el teorema
de Alexander). Las soluciones del sistema dinamico seran representadas en el espacio R3. La idea clave esmediante sistemas dinamicos definir el comportamiento de las cuerdas y de esta manera describir a una
determinada trenza.
4.1. Funciones C
En esta seccion se dara la construccion de una funcion de clase C, la que posteriormente se usara a lo largode este y los siguientes captulos para fabricar un sistema dinamico particular. Para esto se hace uso de las
definiciones que se enuncian enseguida.
Definicion. Una transformacion diferenciable : O O se llama un difeomorfismo de O en O si esdiferenciable,uno a uno, sobreyectiva y su transformacion inversa 1 es diferenciable.Lema. Si A y B son dos subconjuntos disjuntos de Rm, entonces existe una funcion infinitamente diferenciable la cual es identicamente 1 en el conjunto A y 0 en el conjunto B.
Se exhibe a continuacion una funcion que cumpla las caractersticas enunciadas en el lema anterior:
Dados a, b R, tal que 0 < a < b, tomese el conjunto A = (, a) y el conjunto B = (b,). Ademas seconsidera la siguiente funcion f en R como sigue:
f(x) =
exp(
1
x b 1
x a)
si a < x < b
0 otro caso(4.1)
Entonces f es infinitamente diferenciable.
Demostracion. Puesto que f(t) = 0 si t < a o si t > b se tiene por lo tanto que fk(t) = 0, y fk(t) es
de clase C en estos puntos del dominio de la funcion. Ahora cuando a < t < b, la funcion es infinitamente
diferenciable puesto que f(t) se puede escribir como composicion de funciones h(t) =b a
(t b)(t a) ; t 6= a 6= by g(t) = exp(t), ambas funciones infinitamente diferenciables y por ende f(t) = g(h(t)) tambien lo es. Resta
ver que f es continua e infinitamente diferenciable en los puntos t = a y t = b. En las siguientes lneas se
presenta la prueba de que esto se cumple cuando t = a ; la demostracion de cuando t = b es similar.
i) Continuidad de f en t = a. lmta+
f(t) = lmta+
exp
(b a
(t b)(t a))
29
-
30 CAPITULO 4. SISTEMAS DINAMICOS PARA TRENZAS
Puesto que a < t < b entonces t a > 0 y t b < 0, de este modo lmta+
(t b)(t a) = 0 y se tiene
lmta+
exp
(b a
(t b)(t a))
= 0 entonces lmta+
f(t) = lmta
f(t) = f(a) = 0 entonces f es continua en t = a.
ii) lmtaf(t) = 0
Cuando a < t < b se tiene que f(t) = exp
(1
(t b) 1
(t a))
= exp
(b a
(t b)(t a))
. Sea u(t) =
(t b)(t a) se tiene en consecuencia que f(t) = exp(
r
u(t)
)donde r = b a.
Entonces dudt = 2t (a+ b) = 2t c con c = a+ b con lo qued
dt( ru ) =
r
u2(2t c) = (2rt rc)u2 en con-
secuencia f = (2rt rc)u2exp( ru ) por lo tanto f = p1t u2exp( ru ), donde p1(t) = (2rt rc), r, c Res un polinomio en t con subndice 1 en p1(t) correspondiente al orden de la derivada en f
(t).Dado lo anterior, se tiene que:
f (t) = ( p1(t)u2 + (2c 4t) p1(t)u 4r p1(t))(u4 exp( ru ) = p2(t)u4exp(dfracru), donde p2(t) es un polino-
mio en t con subndice 2 que corresponde al orden de f (t).Supongase que esto es valido para n = k 1, i.efk1(t) = pk1(t)u2(k1)exp( ru ) por lo que f
k(t) = ( pk(t)u2 + (2c 4t) pk(t)u 4r pk(t))(u2k exp( ru ) =
pk(t)u2kexp( ru ), donde pk(t) es un polinomio con el subndice k correspondiente al orden de f
k(t). Con lo
que se prueba que tambien es valido para n = k.
Consecuentemente k N se tiene que lmta+
fk(t) = lmta+
(pk(t)u2kexp(
r
u) = pk(a) 0 ( por la regla de
LHospital: u2kexp( ru ) 0 cuando t a).Por otro lado tenemos que lm
tafk(t) = 0 lm
tafk(t) = lm
ta+fk(t)lm
taf(t) = 0.
Por ultimo se prueba que fk(a) existe y es igual a cero para todo k N.
La demostracion se hara por induccion. Notese que f(a) = lmta
f(t) f(a)t a = lmta
f(t)
t a =exp
(r
(t b)(t a))
t a =0.
Supongase que esto valido para n = k
Entonces fk+1(a) = lmta
fk(t) fk(a)t a = lmta
fk(t)
t a = lmta1
t a pk(t)u2kexp(
r
u) = 0 con lo que se sigue
quef es infinitamente diferenciable.
Usando la funcion f , se fabrica la siguiente funcion:
F (x) =
bxf(t)dt b
af(t)dt
La cual toma el valor de 1 para todo x R tal que x a y 0 para x b. Esta funcion tambien es de claseC. Esto como consecuencia del teorema fundamental del calculo (TFC), puesto que si
F (x) =
bxf(t)dt b
af(t)dt
= por el TFC se tiene que F existe y cumple
F (t) =f(t) b
af(t)dt
, como f(t) es continua, se deduce que F existe y es continua; inductivamente se tiene que
F k existe y es continua para todo k en los naturales, esto a causa del TFM y lo demostrado anteriormente.
Con todo lo anterior,se implementa la funcion en Rm como:
(x1 , xm) = F (x21 + + x2m). (4.2)
-
4.2. REPRESENTACION DE TRENZAS 31
Donde se tiene que es diferenciable y toma el valor de 1 para x21 + + x2m a y 0 para x21 + + x2m b,que de manera abreviada y haciendo abuso de notacion se escribira como (x; a, b).
4.2. Representacion de trenzas
En esta seccion se pretende encontrar un sistema dinamico el cual contendra a alguna trenza, la que sera ob-
tenida a traves del teorema de Alexander a partir de algun nudo dado. Usando el sistema coordenado de la
Figura 4.1 se puede observar que una trenza esta compuesta por diversas cuerdas, cada una de las cuales
presenta al menos un giro en una cierta franja vertical ( en un intervalo de la coordenada z). Por lo tanto si se
puede encontrar un sistema dinamico que represente este giro, entonces solo bastara repetir el proceso para
conseguir el numero apropiado de giros que componen a la trenza.
El sistema de ecuaciones diferenciales que se establece de forma general para cada cuerda es el siguiente:
dx
dt= G1(x, y, t)
dy
dt= G2(x, y, t)
dz
dt= G3(x, y, t)
Donde G1, G2 , G3 son funciones de x, y, t. En el caso de G3 se tomara como un valor constante de c = 1.
A continuacion se detalla la manera de como obtener el sistema de ecuaciones diferenciales, estableciendo
Figura 4.1: Representacion de una cuerda
quienes seran G1 y G2, cada una como combinacion de suma y resta de funciones de clase C. Despues deestudiar el comportamiento de x respecto de t, se tiene que:
x = (t; a, b) (t; b, c) a < b < c; a, b, c R (4.3)
Esto ultimo permite obtener un giro en la cuerda, de tal forma que en el plano xz exista una trayectoria
descendente, como se observa en la Figura 4.2 (en la cual el tiempo va de 2 < t < 3 ).
Si se quiere obtener un comportamiento ascendente, la ecuacion para x es:
x = (t; b, c) (t; a, b) a < b < c; a, b, c R (4.4)
-
32 CAPITULO 4. SISTEMAS DINAMICOS PARA TRENZAS
Figura 4.2: Grafica de x vs t donde t esta ubicado en el eje horizontal
De manera similar mediante funciones C combinadas de una manera adecuada se consigue lo buscado parala coordenada y de la siguiente forma:
y = (t; a, (a+b2 )) (t; (a+b2 ), b) + (t; ( b+c2 ), c) (t; c, ( b+c2 ) (a < b < c) (4.5)
Esto se hara cuando se desee un resultado en el que la cuerda pase por encima de otra cuerda.
Puesto que se ha establecido que el valor de z sera constante, el sistema de ecuaciones para una cuerda que
realice un giro, tenga un comportamiento descendente y permita pasar por encima de otra cuerda es:
x = (t; a, b) (t; b, c) a < b < c
y = (t; a, (a+b2 )) (t; (a+b2 ), b) + (t; ( b+c2 ), c) (t; c, ( b+c2 ))
z = 1
(4.6)
En general si se tiene una cuerda ascendente o descendente, que pase por encima o por debajo de otra, se
puede establecer un sistema de ecuaciones diferenciales de la forma:
x =p
i=1((t; ai, bi) (t; bi, ci)), (ai < bi < ci)
y =p
i=1((t; ai, (ai+bi2 )) (t; (ai+bi2 ), bi)+
+(t; ( bi+ci2 ), ci) (t; ci, ( bi+ci2 ))) (ai < bi < ci)
z = 1
(4.7)
En la que el valor de p es el numero total de giros ascendente y/o descendentes que realice la cuerda, y el
smbolo indicara si la cuerda realiza un comportamiento en ascenso o descenso para cada giro i, as como sipasa por arriba o por abajo de otra cuerda.
-
Captulo 5
Solucion Numerica del Sistema
Dinamico
En la presente seccion se describira un algoritmo que permita obtener a traves de metodos numericos una
solucion particular al sistema de ecuaciones diferenciales planteado en el captulo anterior, con condiciones
iniciales x(0), y(0) y z(0); las trayectorias que se obtengan como solucion particular para cada uno de los
sistemas de ecuaciones diferenciales, seran equivalentes a las n-cuerdas que formen alguna n-trenza dada.
Para llevar a cabo esto, se usara el programa Octave1 el cual permite resolver de manera numerica cada
uno de los sistemas de ecuaciones diferenciales (uno para cada cuerda de la n-trenza ) que se han planteado
anteriormente.
5.1. Creacion de una cuerda.
Primero, la funcion:
f(t) =
exp(1
t b 1
t a ) si a < t < b0 otro caso (5.1)
se implementara por medio del siguiente codigo:
function result = fpiece (t)
if (t = b)
result=0;
else
result = exp(1./(t-b)-1./(t-a));
1Octave sera el programa usado en lo que resta de este trabajo para solucionar numericamente los sistemas de ecuaciones
diferenciales
33
-
34 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
end
end
Donde fpiece es la funcion f .
Con base en la construccion anterior, la funcion:
F (x) =
bxf(t)dt b
af(t)dt
(5.2)
sera generada numericamente con el siguiente codigo:
function calcularc=testc(t)
La funcion testc(t) es la implementacion de la funcion (5.2)
calcularc=(quad(@fpiecemidle,(t),3)/(quad(@fpiecemidle,2,3)));
end
En donde se ha implementado la funcion quad de la librera de Octave, que permite integrar numericamente
la funcion (5.2).
Una vez hecho esto, se escribe el codigo a implementar en Octave para:
x = (t; a, b) (t; b, c); a < b < c
Donde la funcion se define como en el captulo anterior. Cuya solucion para una condicion inicial x(0)
dada, presentara un solo giro, ademas la cuerda tendra una trayectoria descendente. El codigo para obtener
la solucion numerica de la ecuacion diferencial x es:
function xpunto=testc(t)
Donde la funcion testc(t) representa a la funcion dx/dt
xpunto=(quad(@fpiecemidle,(t),3)/(quad(@fpiecemidle,2,3)))
-(quad(@fpiecemidle2,(t),4)/(quad(@fpiecemidle2,3,4)));
end
(t; a, b) se representa numericamente por: (quad(@fpiecemidle,(t),3)/(quad(@fpiecemidle,2,3)));
(t; b, c) se representa numericamente por: (quad(@fpiecemidle2,(t),4)/(quad(@fpiecemidle2,3,4))).
Los valores que tomamos para a , b y c son: a = 2, b = 3, c = 4.
En la Figura 5.1 se presenta el comportamiento de x contra t.
Si se quiere que la solucion presente un solo giro y la trayectoria de la curva solucion tenga un resultado
ascendente, se tiene la ecuacion diferencial ordinaria para x como sigue:
x = (t; b, c) (t; a, b); a < b < c
El codigo implementado para el caso particular donde los valores a , b, y c valen 2, 3 y 4 respectivamente es:
function calcularc=testasc(t)
En el que la funcion testasc(t) es la funcion dx/dt
calcularc=(quad(@fpiecemidle2,(t),4)/(quad(@fpiecemidle2,3,4))
-(quad(@fpiecemidle,(t),3)/(quad(@fpiecemidle,2,3)))
end
-
5.1. CREACION DE UNA CUERDA. 35
Figura 5.1: Grafica de x t donde t esta ubicado en el eje horizontal
Figura 5.2: Grafica de x contra t donde t esta ubicado en el eje horizontal
(t; a, b) se representa numericamente por: (quad(@fpiecemidle,(t),3)/(quad(@fpiecemidle,2,3)));
(t; b, c) se representa numericamente por: (quad(@fpiecemidle2,(t),4)/(quad(@fpiecemidle2,3,4))).
La Figura 5.2 representa la grafica de x contra t. El codigo escrito para poder generar la grafica de esta figura
es:
El comando linspace sirve para indicar el punto inicial y punto final del tiempo en el
cual se desarrollara el sistema dinamico.
t=linspace(0,6,200);
Se define la funcion por partes f(t) de la siguiente forma:
f=((t=b)).*0+((t>a)&(ta)&(t
-
36 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
Ecuacion de la funcion phi(t,2,3): donde phi(t,2,3)=-(cumtrapz(t,f))./ff1;
f=((t=3)).*0+((t>2)&(t2)&(t3)&(t3)&(t
-
5.1. CREACION DE UNA CUERDA. 37
dy/dt = phi(t;a,(a+b)/2)-phi(t;(a+b)/2,b)
+phi(t;t,(b+c)/2,c)-phi(t;b,(b+c)/2)
donde se han tomado los valores para a, b y c; a=2, b=3 y c=4.
function calcular4=testay(y,t)
La funcion dy/dt esta representada numericamente por la funcion testay(y,t)
calcular4=quad(@lpiecemidle,t,5/2)/(quad(@lpiecemidle,2,5/2))
-quad(@mpiecemidle,t,3)/(quad(@mpiecemidle,5/2,3))
+quad(@npiecemidle,t,4)/(quad(@npiecemidle,7/2,4))
-quad(@opiecemidle,t,7/2)/(quad(@opiecemidle,3,7/2));
end
En donde la funcion lpiecemidle se creo a traves del siguiente codigo:
function resultado = lpiecemidle(s)
if (s = 5/2)
resultado=0;
elseif (s > 2)
resultado = exp(1./(s-5/2)-1./(s-2));
elseif(s < 5/2)
resultado = exp(1./(s-5/2)-1./(s-2)) ;
end
end
De manera analoga se crearon las funciones:
mpiecemidle, npiecemidle y opiecemidle.
(t; a, (a+b2 )) es quad(@lpiecemidle,t,5/2)/(quad(@lpiecemidle,2,5/2))
(t; (a+b2 ), b) es quad(@mpiecemidle,t,3)/(quad(@mpiecemidle,5/2,3))
(t; ( b+c2 ), c) es quad(@npiecemidle,t,4)/(quad(@npiecemidle,7/2,4))
(t; c, ( b+c2 )) es quad(@opiecemidle,t,7/2)/(quad(@opiecemidle,3,7/2)).
En la Figura 5.3 se presenta la grafica del comportamiento de y contra t. Para poder generarla la grafica, se
Figura 5.3: Representacion del comportamiento y vs t de en el plano yt.
escribio el siguiente codigo:
-
38 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
Script con el que obtiene la grafica para dy/dt,tal que:
phi(t;a,(a+b)/2)-phi(t;(a+b)/2,b)+phi(t;t,(b+c)/2,c)-phi(t;b,(b+c)/2).
El comando linspace sirve para indicar el punto inicial y punto final del tiempo en
el cual se desarrollara el sistema dinamico.
t=linspace(0,6,200);
Se define la funcion por partes f(t) de la siguiente forma:
f=((t=b)).*0+((t>a)&(t2)&(t2)&(t5/2)&(t5/2)&(t7/2)&(t7/2)&(t3)&(t3)&(t
-
5.2. CREACION DE DOS CUERDAS 39
plot(t,ypunto);
Como se dijo anteriormente la ultima rutina implementada sirve para que la cuerda generada pase por encima
de otra cuerda. Si se desea el efecto contrario, esto es, que la cuerda de una trenza pase por debajo de otra
cuerda se hace el cambio de signos () en la ecuacion (5.3), este cambio permitira obtener el efecto buscado.Al hacer esto la ecuacion diferencial ordinaria para y, sera:
y = (t; (a+b2 ), b) (t; a, (a+b2 ) + (t; c, ( b+c2 ) (t; ( b+c2 ), c) (a < b < c) (5.4)
La siguiente figura muestra la grafica de y contra t, la que una vez solucionado el sistema de ecuaciones
diferenciales permitira que la cuerda pase por debajo de otra cuerda.
Figura 5.4: Comportamiento y contra t de en el plano yt para una cuerda que pase por abajo de otra cuerda
5.2. Creacion de dos cuerdas
Una vez que se han creado los codigos para las ecuaciones diferenciales ordinarias para x y y y tomando en
cuenta que la ecuacion diferencial ordinaria en z sera z = 1, se hace uso del sistema de ecuaciones diferenciales
ordinarias (5.7) para crear dos cuerdas; esto se lograra de forma numerica, obteniendo la solucion particular
para dicho sistema de ecuaciones diferenciales con la condicion inicial: x(0) = 1 , y(0) = 0 , z(0) = 0. Esta
solucion particular representara a la primer cuerda, la que tendra un movimiento descendente en el plano xz y
pasara por arriba de la segunda cuerda. A continuacion se usa nuevamente el sistema de ecuaciones diferenciales
(5.7) para generar la segunda cuerda; tomando en cuenta que para esta cuerda se busca un comportamiento
ascendente en el plano xz y que ademas pase por debajo la primera cuerda, se haran los cambios de signos
pertinentes en el sistema de ecuaciones diferenciales (9), incluyendo ademas la solucion particular para tal
sistema con la condicion inicial: x(0) = 0 , y(0) = 0 , z(0) = 0. Por ultimo se grafican ambas soluciones en una
misma ventana con lo cual se conseguira una representacion similar a la Figura 5.5.
Con base en lo dicho en el anterior parrafo, se prosigue con la escritura de la siguiente rutina ,la cual permite
llevar a cabo el objetivo planteado en tal parrafo.
Codigo en Octave para la solucion del sistema de ecuaciones diferenciales para 2 cuerdas
El siguiente script nos permite resolver dossistemas de 3 ecuaciones diferenciales cada uno
con condiciones iniciales dadas,mediante el comando "lsode" de Octave.
Una vez hecho por medio de la funcion "plot3" de Octavese graficaran ambas soluciones las que
representaran una trenza compuesta por dos cuerdas.
-
40 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
Figura 5.5: Una 2-trenza en R3, generada con el programa KnotPlot
Las condiciones iniciales para el primer sistema (1) son:
x(0)= 1, y(0)=0, z(0)= 0.
Las condiciones iniciales para el segundo sistema (2) son:
x(0)= 0, y(0)=0, z(0)= 0.
t=0:0.1:6; este vector marca el inicio del tiempo ti=0,
con saltos equiespaciados de 0.1 hasta el
tiempo final tf= 6
ycuerda1=lsode(@sistdinamico,[1,0],t);ycuerda1 es el primer sistema (1)
ycuerda2=lsode(@sistdinamico2,[0,0],t);ycuerda2 es el segundo sistema (2)
plot3(t,ycuerda1(:,2),ycuerda1(:,1) )
hold on
plot3(t,ycuerda2(:,2),ycuerda2(:,1) )
hold off
______________________________________________________
La funcion sistdinamico establece el siguiente
sistema de ecuaciones diferenciales ordinarias
para la primer cuerda
(descendente y por arriba de otra cuerda) de la trenza.
dx/dt = phi(t;a,b)-phi(t;b,c)
dy/dt = phi(t;a,(a+b)/2)-phi(t;(a+b)/2,b)
+phi(t;t,(b+c)/2,c)-phi(t;b,(b+c)/2)
dz/dt = 1
Con valores en t: a = 2, b = 3, c = 4;
function sistedo=sistdinamico(x,t)
dx/dt es la funcion testc(x,t)
dy/dt es la funcion testay(x,t)
-
5.2. CREACION DE DOS CUERDAS 41
dz/dt es la funcion constante 1
sistedo=[testc(x,t),testay(x,t), 1];
end
________________________________________________________
La funcion sistdinamico2 establece el siguiente
sistema de ecuaciones diferenciales ordinarias
para la segunda cuerda
(ascendente y por abajo de otra cuerda) de la trenza.
dx/dt = phi(t;b,c)-phi(t;a,b)
dy/dt = phi(t;(a+b)/2,b)-phi(t;a,(a+b)/2)
-phi(t;t,(b+c)/2,c)+phi(t;b,(b+c)/2)
dz/dt = 1
Con valores en t: a = 2, b = 3, c = 4;
function sistedo2=sistdinamico2(x,t)
dx/dt es la funcion testc(x,t)
dy/dt es la funcion testay(x,t)
dz/dt es la funcion constante 1
sistedo2=[testasc(x,t),testabajo(x,t)];%
end
En la figura 5.6 se muestran varias graficas obtenidas como resultado de lo anterior.
Similarmente se puede crear cualquier cuerda de una trenza por medio de un sistema dinamico resolviendo
Figura 5.6: Trenza en R3 compuesta por 2 cuerdas, generadas con el programa Octave
la Ecuacion 4.7 para cada cuerda que componga a la trenza.
Para ejemplificar esto ultimo, en las siguiente lneas se representa por medio de un sistema dinamico a la
trenza de 3 cuerdas cuya cerradura constituye al nudo trebol.
Ejemplo. Tomese al nudo trebol como el que se muestra en la Figura 5.7. En seguida se dara una representacion
de una 2-trenza as como el conjunto de sistemas dinamicos que definen a dicha cuerda.
En la Figura 5.8, el nudo trebol con el que iniciamos puede ser obtenido como la clausura de esta 2-trenza.
En seguida se presentan los sistemas dinamicos para cada cuerda que constituye a dicha trenza.
-
42 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
Figura 5.7: El nudo trebol expresado en terminos de una 3-trenza
Figura 5.8: Diagrama regular de la 3-trenza
Para la primer cuerda se define el siguiente sistema de ecuaciones diferenciales:
x = (t; b, c) (t; a, b) + (t; d, e) (t; e, f) + (t; g, h) (t;h, i)
y = (t; a, (a+b2 ) (t; (a+b2 ), b) + (t; ( b+c2 ), c) (t; b, ( b+c2 ))
+(t; (d+e2 ), e) (t; d, (d+e2 ) + (t; ( e+f2 ), f) (t; e, ( e+f2 ))
+(t; g, ( g+h2 ) (t; ( g+h2 ), h) + (t; (h+i2 ), i) (t;h, (h+i2 ))
z = 1
(5.5)
En donde a, b, c, d, e, , f, g, h, i son escalares en R estrictamente mayores que cero.Para la segunda cuerda, basta modificar el sistema dinamico que se dio anteriormente haciendo el cambio
signo por donde este sea requerido. Dando condiciones iniciales para cada sistema, se resuelven y graficanambas soluciones particulares.
Como se menciono anteriormente se da solucion a cada uno de los sistemas numericamente. En los siguientes
parrafos se procede a escribir la rutina que permitio encontrar las dos soluciones.
Codigo para la solucion de las cuerdas que componen a la 2-trenza con cerradura equivalente al
nudo trebol.
El siguiente script nos permite resolver dos sistemas de 3 ecuaciones diferenciales
cada uno con condiciones iniciales dadas, una vez hecho esto, por medio de la funcion
"plot3" se graficaran ambas soluciones las que representaran una 2-trenza cuya cerra-
dura conformara un nudo trebol.
Las condiciones iniciales para el primer sistema son:
-
5.2. CREACION DE DOS CUERDAS 43
x(0)= 1, y(0)=0, z(0)= 0.
Las condiciones iniciales para el segundo sistema son:
x(0)= 0, y(0)=0, z(0)= 0.
t=0:.1:12; este vector marca el inicio del tiempo ti=0,
con saltos equiespaciados de 0.1 hasta eltiempo final tf= 12
ycuerda1=lsode(@sistdinamico,[1,0],t); ycuerda1 es el primer sistema
ycuerda2=lsode(@sistdinamico2,[0,0],t);ycuerda2 es el segundo sistema
plot3(t,ycuerda1(:,2),ycuerda1(:,1) )
hold on
plot3(t,ycuerda2(:,2),ycuerda2(:,1) )
hold off
_______________________________________________________
La funcion sistdinamico establece el siguiente sistema de ecuaciones diferenciales
ordinarias para la primer cuerda (descendente y por arriba de otra cuerda)
de la trenza.
dx/dt = phi(t;a,b)-phi(t;b,c)+phi(t;t,e,f)-phi(t;d,e)
+ phi(t;g,h)-phi(t;h,i)
dy/dt = phi(t;a,(a+b)/2)-phi(t;(a+b)/2,b)
+phi(t;t,(b+c)/2,c)-phi(t;b,(b+c)/2)
+phi(t;(d+e)/2,e)-phi(t;d,(d+e)/2)
+phi(t;(e+f)/2,f)-phi(t;e,(e+f)/2)
dz/dt = 1
Con valores en t: a = 2, b = 3, c = 4; d =5, e = 6, f = 7; g =8 , h = 9, i = 10;
function sistedo=sistdinamico(x,t)
dx/dt es la funcion testc(x,t)
dy/dt es la funcion testay(x,t)
dz/dt es la funcion constante 1
sistedo=[testc(x,t),testay(x,t), 1];
end
________________________________________________________
Funcion que determina a la ecuacion diferencial dx/dt
function calcularc=testc(x,t)
calcularc=(quad(@fpiecemidle,(t),3)./(quad(@fpiecemidle,2,3)))
-(quad(@fpiecemidle2,(t),4)./(quad(@fpiecemidle2,3,4)))
+(quad(@hpiecemidle,(t),7)./(quad(@hpiecemidle,6,7)))
-(quad(@ipiecemidle,(t),6)./(quad(@ipiecemidle,5,6)))
+(quad(@jpiecemidle,(t),9)./(quad(@jpiecemidle,8,9)))
-(quad(@kpiecemidle,(t),10)./(quad(@kpiecemidle,9,10)));
end
_______________________________________________________
Funcion que determina a la ecuacion diferencial dy/dt
donde dy/dt es creada numericamente por la funcion testay(x,t)
function calcular4=testay(x,t)
calcular4= quad(@lpiecemidle,t,5/2)/(quad(@lpiecemidle,2,5/2))
-
44 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
-quad(@mpiecemidle,t,3)/(quad(@mpiecemidle,5/2,3)
+quad(@npiecemidle,t,4)/(quad(@npiecemidle,7/2,4))
-quad(@opiecemidle,t,7/2)/(quad(@opiecemidle,3,7/2))
+quad(@ppiecemidle,t,6)/(quad(@ppiecemidle,11/2,6))
-quad(@qpiecemidle,t,11/2)/(quad(@qpiecemidle,5,11/2))
+quad(@esepiecemidle,t,13/2)/(quad(@esepiecemidle,6,13/2))
-quad(@rpiecemidle,t,7)/(quad(@rpiecemidle,13/2,7))
+quad(@upiecemidle,t,17/2)/(quad(@upiecemidle,8,17/2))
-quad(@vpiecemidle,t,9)/(quad(@vpiecemidle,17/2,9))
+quad(@wpiecemidle,t,10)/(quad(@wpiecemidle,19/2,10))
-quad(@zpiecemidle,t,19/2)/(quad(@zpiecemidle,9,19/2));
end
_______________________________________________________
function sistedo=sistdinamico(x,t)
dx/dt es la funcion -testc(x,t)
dy/dt es la funcion -testay(x,t)
dz/dt es la funcion constante 1
sistedo2=[-testc(x,t),-testay(x,t)];
end
Las Figura 5.9 permite ver distintas graficas de la 2-trenza en el espacio tridimensional.
S bien se ha logrado establecer un sistema de ecuaciones diferenciales para cada cuerda, se tiene que dar
Figura 5.9: La 3-trenza represetada como solucion de us sistema dinamico yz
un sistema dinamico para cada una que componga a la trenza que se pretende representar. Como se puede
observar en el Ejemplo 1 para definir una dos trenza como la de la Figura 5.8, se necesitan dos sistemas de
ecuaciones, uno para cada cuerda que de la describe. Sin embargo con este procedimiento aun no se puede
establecer un sistema dinamico que represente a una trenza; con esto en mente el siguiente objetivo se centra
en obtener uno solo sistema de ecuaciones diferenciales que defina no solo a la 2-trenza de el ejemplo citado
-
5.2. CREACION DE DOS CUERDAS 45
sino a cualquier n-trenza. La idea general para cumplir con este proposito es combinar de manera adecuada
todas las ecuaciones que representan a las cuerdas de la n-trenza en una solo sistema, de tal suerte que se evite
cualquier interseccion que se pudiera presentar entre ellas, con lo que finalmente este unico sistema describira a
toda la n-trenza. En seguida se explica con mas detalle la forma de lograr esto. La forma de conseguir alcanzar
esta meta planteada es crear un tubo-vecindad como el de la Figura 5.10; en dicha grafica se puede ver que
se ha creado un tubo vecindad alrededor de cada cada cuerda, ademas cada tubo tiene como centro a una de
las cuerdas de la trenza. El fin de la creacion de tal tubo, es que dentro de este todas las trayectorias sigan la
trayectoria de la cuerda central y que fuera de el la dinamica sea cero; esto es que x = 0, y = 0 y z = 0 en
el exterior de cada tubo. Otro acierto que se obtiene al hacer esto es evitar la confluencia entre las cuerdas.
Definicion. Se define la m-cuerda de una trenza como el conjunto de m curvas suaves en R3 que tieneninterseccion vaca entre ellas. Con base en lo dicho en el parrafo anterior y en esta definicion se tiene que:
conforme el radio de los tubos-vecindad disminuye, existira un tubo alrededor de cada cuerda el cual no
tendra interseccion con el resto de los otros. Siguiendo este camino, se pretende conseguir un solo sistema
dinamico para toda la trenza de tal suerte que evitaremos que exista cruces entre las cuerdas y as alcanzar
el fin buscado. Para poder crear estos tubos vecindad se hara uso de la funcion C (la se ha empleado a lo
Figura 5.10: Tubo vecindad alrededor de cada cuerda de una dos-trenza
largo de este trabajo) definida de la forma
= ((x x1)2 + (y y1)2); 1, 2) (5.6)
En donde (x1, y1) es la coordenada correspondiente a la cuerda central para cada valor de t en el que esta de-
finida la funcion; los valores 1 y 2 indican los diametros de los tubos, los cuales se deben escoger de tal
forma que sean lo suficientemente pequenos para impedir que haya interseccion entre los tubos. Finalmente se
combina la ecuacion 4.7 con la ecuacion 5.6 para obtener el siguiente sistema
x =m
j=1 j xj
y =m
j=1 j yj
z =m
j=1 j
(5.7)
Donde m es el numero total de cuerdas de la trenza, j es la funcion tubo para la j-esima cuerda y xj , yj
componen el sistema dinamico para la j-esima cuerda, obtenido en la Ecuacion 4.7.
Con base en este proceder, se ha obtenido un solo sistema dinamico que define a la trenza en su totalidad. En
el siguiente ejemplo se muestra la forma de como usar la Ecuacion 5.7.
-
46 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
Ejemplo 2. Tomemos de nuevo el nudo trebol presentado en el ejemplo anterior, as como la 2-trenza
que tambien fue usada. Recordar que esta 2-trenza al realizar su cerradura representa al nudo trebol.
Sea (x1, y1) y (x2, y2) las coordenadas de la primer y segunda cuerda para un valor en particular de t, a
continuacion se describe el sistema dinamico que definira por completo a esta dos trenza.
x = ((x x1)2 + (y y1)2); 1, 2)
(t; a, b) (t; b, c) + (t; e, f) (t; d, e) + (t; g, h) (t;h, i)
+ ((x x2)2 + (y y2)2); 1, 2)
(t; b, c) (t; a, b) + (t; d, e) (t; e, f) + (t;h, i) (t; g, h)y = ((x x1)2 + (y y1)2); 1, 2)
(t; a, (a+b2 ) (t; (a+b2 ), b) + (t; ( b+c2 ), c) (t; b, ( b+c2 ))
+(t; (d+e2 ), e) (t; d, (d+e2 ) + (t; ( e+f2 ), f) (t; e, ( e+f2 ))
+(t; g, ( g+h2 ) (t; ( g+h2 ), h) + (t; (h+i2 ), i) (t;h, (h+i2 ))
+ ((x x2)2 + (y y2)2); 1, 2)
+(t; (a+b2 ), b) (t; a, (a+b2 ) + (t; b, ( b+c2 ) (t; ( b+c2 ), c)
+(t; d, (d+e2 ) (t; (d+e2 ), e) + (t; e, ( e+f2 ) (t; ( e+f2 ), f)
+(t; ( g+h2 ), h) (t; g, ( g+h2 ) + (t;h, (h+i2 ) (t; (h+i2 ), i)z = ((x x1)2 + (y y1)2); 1, 2)
+ ((x x2)2 + (y y2)2); 1, 2)
(5.8)
Donde a, b, c, d, e, f, g, h, i, 1, 2 R+.Codigo para encontrar la 2-trenza a traves del metodo 2.
_________________________________________________________________
El siguiente script permite reolver el sistema dinamico
de manera particular para distintas condiciones iniciales
dadas; dicho sistema es representado por la funcion fintcontrol2
t=0:.2:12;
y=lsode(@fintcontrol2,[1,1,0,0,0,0],t);
y2=lsode(@fintcontrol2,[0,1,0,0,0,0],t);
y3=lsode(@fintcontrol2,[1.1,1,0.1,0,0,0],t);
y4=lsode(@fintcontrol2,[0.1,1,0,0,0,0],t);
y5=lsode(@fintcontrol2,[0.9,1,0,0,0,0],t);
-
5.2. CREACION DE DOS CUERDAS 47
y6=lsode(@fintcontrol2,[0,1,-0.15,0,0,0],t);
y7=lsode(@fintcontrol2,[1.15,1,0,0,0,0],t);
y8=lsode(@fintcontrol2,[0.1,1,0.1,0,0,0],t);
plot3(t,y(:,3) ,y(:,1),"1")
hold on
plot3(t,y2(:,3) ,y2(:,1),"2")
plot3(t,y3(:,3) ,y3(:,1),"3")
plot3(t,y4(:,3) ,y4(:,1),"4")
plot3(t,y5(:,3) ,y5(:,1),"2")
plot3(t,y6(:,3) ,y6(:,1),"5")
plot3(t,y7(:,3) ,y7(:,1),"4")
plot3(t,y8(:,3) ,y8(:,1),"5")
hold off
La funcion fdoscontrol establece numericamente el comportamiento de la funcion
= ((x x1)2 + (y y1)2); 1, 2)presente en la ecuacion (15), con valores 1 = 0,20 y 2 = 0,25.
function control2=fdoscontrol(t)
format short
if (t=0.25)
control2=-(quad(@fpiece,t,0.25)/(quad(@fpiece,0.20,0.25)));
else
control2=(quad(@fpiece,t,0.25)/(quad(@fpiece,0.20,0.25)));
end
end
______________________________________________________
La funcion fintcontrol establece el siguiente
sistema de ecuaciones diferenciales ordinarias
para ambas cuerdas que definen completamente a la 2-trenza.
Con valores en t: a = 2, b = 3, c = 4 ,
d = 5, e = 6, f = 7 ,
g = 8, h = 9 , i = 10.
function integtotal=fintcontrol2(x,t)
integtotal=[fdoscontrol((x(1)-x(2)).^2+(x(3)-x(4)).^2).*testc(x,t)
+fdoscontrol((x(1)-x(5)).^2+(x(3)-x(6)).^2).*(testasc(x,t)),testc(x,t),
fdoscontrol((x(1)-x(2)).^2+(x(3)-x(4)).^2).*testay(x,t)
+fdoscontrol((x(1)-x(5)).^2+(x(3)-x(6)).^2).*(gtestay(x,t))
,testay(x,t),testasc(x,t),gtestay(x,t)];
end
-
48 CAPITULO 5. SOLUCION NUMERICA DEL SISTEMA DINAMICO
La grafica obtenida al resolver el sistema de ecuaciones diferenciales anterior para distintos valores en las
condiciones iniciales se muestra en las siguientes figuras.
Figura 5.11: Representacion del tubo vecindad de una 3-trenza
-
Captulo 6
Sistema de EDOS para representacion
de nudos
En esta seccion, se establecera un sistema de ecuaciones diferenciales para representar nudos. La idea es usar
el sistema de ecuaciones diferenciales descrito anterirormente el cual, para ncondiciones iniciales distintas
generaba a una n-trenza. Por otra parte como se menciono en el Captulo 3, cualquier nudo se puede obtener
a traves de la cerradura de una trenza; por consiguiente la trenza que hemos conseguido por medio del sistema
5.8 le aplicaremos la cerradura para obtener un nudo. Para poder llevar a cabo esta tarea,a tal sistema se le
hara una variacion en z de tal suerte que el campo vectorial ahora sea periodico. De esta manera lograremos
unir los dos puntos finales del espacio de fase en el punto del tiempo para el cual se haya completado el periodo.
Para poder llevar a cabo esto, consideremos el siguiente sistema:
x1 =m
j=1 j x1j
x2 =m
j=1 j x2j
z =m
j=1 j 2
1 z2
(6.1)
En el que xj(t) vector solucion en R2 para la j-esima cuerda sea una funcion C,
x : [0, pi ] R2. (6.2)Ademas
j : R2 R (6.3)es una funcion C la cual vale 1 si x Uj , 1 j K, y 0 si x R\Vj , en donde cada Uj sea un subconjuntoabierto y acotado en R2, tal que existen vecindades abiertas disjuntas Vj de Uj para la que se cumple
Vj Uj y Vj Vk = j 6= k 1 j, k K. (6.4)
6.1. Representacion de un enlace doble
En esta parte ejemplificaremos el uso del sistema de ecuaciones diferenciales descrito en el inicio de la seccion.
Se representara a un doble enlace compuesto por dos nudos triviales como la cerradura de una 2-trenza, la
que obtendremos con el siguiente sistema
49
-
50 CAPITULO 6. SISTEMA DE EDOS PARA REPRESENTACION DE NUDOS
x = ((x x1)2 + (y y1)2); 1, 2)(t; a, b) (t; b, c) + (t; e, f) (t; d, e) + ((x x2)2 + (y y2)2); 1, 2)(t; b, c) (t; a, b) + (t; d, e) (t; e, f)
y = ((x x1)2 + (y y1)2); 1, 2)(t; a, (a+b2 ) (t; (a+b2 ), b) + (t; ( b+c2 ), c) (t; b, ( b+c2 ))+ (t; (d+e2 ), e) (t; d, (d+e2 ) + (t; ( e+f2 ), f) (t; e, ( e+f2 ))+ ((x x2)2 + (y y2)2); 1, 2)+ (t; (a+b2 ), b) (t; a, (a+b2 ) + (t; b, ( b+c2 ) (t; ( b+c2 ), c)+ (t; d, (d+e2 ) (t; (d+e2 ), e) + (t; e, ( e+f2 ) (t; ( e+f2 ), f)
z = ((x x1)2 + (y y1)2); 1, 2) 2
1 z2+ ((x x2)2 + (y y2)2); 1, 2) 2
1 z2
(6.5)
Donde a, b, c, d, e, f, 1, 2 R+ y x, y estan definidos en el intervalo [0, pi].Nuevamente solucionaremos numericamente el sistema de ecuaciones diferenciales descritas anteriormente, en
las siguiente figuras se mostraran las graficas que describen a este doble enlace.
Figura 6.1: Grafica de un doble enlace obtenido por un sistema de ecuaciones diferenciales
-
Captulo 7
Conclusiones
El objetivo principal de la tesis fue, dado un determinado nudo, construir un sistema de ecuaciones diferenciales
ordinarias, el cual tuviera la propiedad de que para cierta condicion inicial, la solucion que pasa por esta
condicion fuera una orbita periodica y ademas formara dicho nudo en el espacio R3.Es ampliamente conocido el hecho que un nudo puede ser expresado en terminos de cerradura de trenzas. A
partir de esto, el objetivo se centro en expresar mediante un sistema de ecuaciones diferenciales ordinarias
definidas en un intervalo de tiempo el cual satisface que, para n condiciones iniciales, las trayectorias solucion
formaran explcitamente la n-trenza. Para obtener las ecuaciones diferenciales del sistema dinamico y en el
cual esten contenidas las trenzas, se uso un tipo particular de funciones que permitieron construir una tubo-
vecindad en cada cuerda de la trenza. Posteriormente al hacer periodica la solucion con una condicion inicial
particular se obtuvo el nudo deseado.
Para resolver de manera numerica este sistema de ecuaciones diferenciales ordinarias, se empleo el software
Octave; dicha solucion se represento de manera grafica como un nudo.
Por otra parte en [4], J. Birman y R. Williams fueron de los primeros en mostrar orbitas periodicas anudadas
en sistemas dinamicos. Recientemente, en [5,6,7] tambien se abordo el problema de la realizacion de nudos a
traves de sistemas dinamicos esto es, dado un cierto nudo se busca poder construir o encontrar un sistema
dinamico que tenga al nudo como orbita periodica.
Algunos de los problemas a futuro son obtener una generalizacion de los resultados de [3,6,7] para alguna clase
diferente de sistemas dinamicos, as como determinar si existe alguna relacion entre los invariantes de nudos
o 3-trenzas, como el polinomio corchete, y los sistemas dinamicos generados en [3].
51
-
52 CAPITULO 7. CONCLUSIONES
-
Bibliografa
[1] Yi Song, Stephen P. Banks and David Diaz. Dynamical Systems on Three Manifolds Part I: Knots, Links
and Chaos. University of Sheffield. 2008
[2] Kunio Murasugi. Knot Theory and Its Applications. Birkhauser, 1996.
[3] Kauffman, L. Knot Theory and physics. Singapore: World Sci, 1991.
[4] Birman, J. and Williams, R. Knotted periodic orbits in dynamical sistems - I: Lorentz Equations. Topo-
logy,22. 1983.
[5] Banks, S. P. and Diaz. Almost radially-invariant systems containing arbitrary knots and links. Int. J. of
Bifurcation and Chaos, 14, 1267-1276. 2004.
[6] W. Chen, S. P. Banks, Knots, Links and Spun Dynamical Systems, In- ternational Journal of Bifurcation
and Chaos, Vol. 20, No. 4 (2010) 1041 - 1048.
[7] J. Li, F. Chen, Knotted Periodic Orbits and Chaotic Behavior of a Class of Three-Dimensional Flows,
International Journal of Bifurcation and Chaos, Vol.21, No. 9 (2011) 2505 - 2523.
[8] J. Sotomayor, Licoes de Equacoes Diferenciais Ordinarias, Proyeto Euclides IMPA, CNPq., Brasil, 1979.
[9] Robert L. Devaney. An Introduction to Chaotic Dynamical Systems. Addison-Wesley Publishing Com-
pany. 1989.
[10] Kathleen T. Alligood, Tim D. Sauer and James A. Yorke. Springer. 1996.
[11] Lawrence Perko. Differential Equations and Dynamical Systems. Springer. 1991.
[12] Tom M. Apostol. Analisis Matematico. Editorial Reverte. 1996
[13] Won Y. Yang, Wenwu Cao, Tae S.Chung, John Morris. Applied numerical methods using MATLAB.
Wiley-Interscience 1995.
53


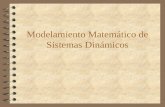

![Analisis de Los Sistemas Dinamicos[Roncancio]](https://static.fdocuments.ec/doc/165x107/557212fd497959fc0b915aeb/analisis-de-los-sistemas-dinamicosroncancio.jpg)