Sistema de Rehabilitación de Miembro Inferior - … · Sistema de Rehabilitación de Miembro...
20
Revista Mexicana de Ingeniería Biomédica ISSN: 0188-9532 [email protected] Sociedad Mexicana de Ingeniería Biomédica México Franco, R.; Zuluaga, R.; Yepes, J.C.; Saldarriaga, A.J.; Pérez, V.Z.; Betancur, M.J. Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicación para Víctimas de Minas Antipersonal Revista Mexicana de Ingeniería Biomédica, vol. 37, núm. 3, septiembre-diciembre, 2016, pp. 201-219 Sociedad Mexicana de Ingeniería Biomédica Distrito Federal, México Disponible en: http://www.redalyc.org/articulo.oa?id=61946941003 Cómo citar el artículo Número completo Más información del artículo Página de la revista en redalyc.org Sistema de Información Científica Red de Revistas Científicas de América Latina, el Caribe, España y Portugal Proyecto académico sin fines de lucro, desarrollado bajo la iniciativa de acceso abierto
Transcript of Sistema de Rehabilitación de Miembro Inferior - … · Sistema de Rehabilitación de Miembro...
Revista Mexicana de Ingeniería
Biomédica
ISSN: 0188-9532
Sociedad Mexicana de Ingeniería
Biomédica
México
Franco, R.; Zuluaga, R.; Yepes, J.C.; Saldarriaga, A.J.; Pérez, V.Z.; Betancur, M.J.
Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una
Potencial Aplicación para Víctimas de Minas Antipersonal
Revista Mexicana de Ingeniería Biomédica, vol. 37, núm. 3, septiembre-diciembre, 2016,
pp. 201-219
Sociedad Mexicana de Ingeniería Biomédica
Distrito Federal, México
Disponible en: http://www.redalyc.org/articulo.oa?id=61946941003
Cómo citar el artículo
Número completo
Más información del artículo
Página de la revista en redalyc.org
Sistema de Información Científica
Red de Revistas Científicas de América Latina, el Caribe, España y Portugal
Proyecto académico sin fines de lucro, desarrollado bajo la iniciativa de acceso abierto

ARTÍCULO DE INVESTIGACIÓN REVISTA MEXICANA DE
INGENIERÍA BIOMÉDICAibVol. 37, No. 3, Sep-Dic 2016, pp. 201-219
dx.doi.org/10.17488/RMIB.37.3.5
Sistema de Rehabilitación de Miembro InferiorInterconectado con un Videojuego: Una PotencialAplicación para Víctimas de Minas AntipersonalR. Franco1, R. Zuluaga1, J.C. Yepes2 3, A.J. Saldarriaga2, V.Z. Pérez1 2, M.J. Betancur1 3
1Facultad de Ingeniería Eléctrica y Electrónica,2Grupo de Investigaciones en Bioingeniería,3Grupo de Automática y Diseño A+D, Universidad Pontificia Bolivariana, Medellín, Colombia.
RESUMENA nivel mundial se registran anualmente alrededor de 3,308 víctimas de minas antipersonal (MAP), de las
cuales un 67% corresponde a lesiones de miembros inferiores que requieren rehabilitación. Este artículo presenta unsistema de adquisición de datos para un equipo de rehabilitación de víctimas de MAP, quienes al interactuar con unvideojuego de carreras de automóviles realizan la terapia. El sistema permite al terapeuta establecer una velocidadde pedaleo mínima y analizar la fuerza y velocidad del mismo. El desarrollo conceptual incorpora una bicicletaestática comercial, sensores para medir la fuerza de pedaleo, un sensor óptico para medir la velocidad y pulsadoresde mando para interactuar con el videojuego. Para evaluar el sistema se caracterizaron y probaron los sensores, y serealizaron encuestas de percepción a 20 fisioterapeutas relacionadas con ergonomía, seguridad y potenciales beneficiosdel sistema. El 70%, 90% y 80% de los fisioterapeutas valoraron, respectivamente, estas características en un nivelAlto. Adicionalmente, al menos el 85% de ellos están de acuerdo con nueve beneficios potenciales para personasvíctimas de MAP, por lo tanto se plantea que el sistema desarrollado puede utilizarse como ’juego serio’ para apoyarlas terapias de rehabilitación de personas con prótesis por esta causa.Palabras clave: minas antipersonal, rehabilitación, salud, fisioterapia, sistema de adquisición de datos,bicicleta.
Correspondencia:Juan Camilo YepesUniversidad Pontificia Bolivariana, Dirección: Cir. 1 #73-76, B22C,Teléfono: +57 (4) 448 8388 Ext. 12400Medellín, Colombia.Correo electrónico: [email protected]
Fecha de recepción:16 de marzo de 2016
Fecha de aceptación:29 de junio de 2016

202 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
ABSTRACTWorldwide there are approximately 3,308 records of landmine victims during a year. 67% of them suffered
injuries which require physical rehabilitation. This paper presents a data acquisition system for landmine victimsrehabilitation, interfaced with a videogame, which enables to interact with a racing game. The therapist can setthe minimum speed required for the rehabilitation and analyze the forces and speed developed while pedaling.The conceptual development incorporates a commercial static bicycle, sensors to measure the pedaling force, anoptic sensor to measure the speed, and command buttons to control the videogame. In order to evaluate thesystem, the sensors were characterized and tested, and a survey was conducted to 20 physiotherapists in order toevaluate the perception of ergonomics, safety and possible benefits of the data acquisition system for rehabilitationof landmine victims. 70%, 90% and 80% of the physiotherapists, respectively, assessed these characteristics as Highlevel. Moreover, at least 85% of them are agree with nine possible benefits for rehabilitation of landmine explosionvictim. Therefore, it is proposed that the data acquisition system can be used as a serious game that supportsrehabilitation therapies of people with a prosthesis due to this cause.Keywords: landmine, rehabilitation, health, physiotherapy, data acquisition system, bicycle.
INTRODUCCIÓN
De acuerdo con el último reporte disponibledel Landmine and Cluster Munition Monitor,que incluye estadísticas de explosiones porminas antipersonal (MAP) a nivel mundial,en 2013 se registró un total de 3,308 víctimas,de las cuales 2,218 personas sobrevivieroncon lesiones físicas. Colombia es el segundopaís más afectado por MAP (368 víctimas en2013), encontrándose por encima de paísescomo Pakistán (219 personas), Siria (201personas) o Iraq (124 personas), y siendo sólosuperado por Afganistán (1050 personas) [1].
Según el reporte de víctimas, alrededor del40 % de las explosiones en Colombia debidoa MAP involucran lesiones de miembrosinferiores. Solamente el fenómeno de lasamputaciones, consecuencia de las MAP,representa más del 16 % del total de lesionesen esta zona del cuerpo [2].
Los efectos de la explosión derivadade las MAP se pueden clasificar eninmediatos y secundarios. Entre losefectos inmediatos se cuentan amputación,fracturas, luxaciones, lesiones miotendinosas,
quemaduras, contaminación bacteriana porcuerpos extraños y lesiones vasculares yde nervio periférico. Entre los efectossecundarios se tiene isquemia, síndromecompartimental, infección, no unión defracturas, deformidad, parálisis y dolor [3].Una vez superados todos los procedimientosllevados a cabo durante la hospitalización,se prosigue con la rehabilitación física yreintegración socio-económica del paciente.Esta rehabilitación física puede requerirsedurante el resto de su vida y está basadaprincipalmente en la recuperación de lamovilidad, lo cual incluye poder caminarnuevamente. Esto podría lograrse con laayuda de miembros artificiales (prótesis) ode aparatos para apoyar la disfunción de unmiembro (órtesis) [4].
El proceso de rehabilitación de unavíctima de MAP involucra una parte pasivay una parte activa [5]. La rehabilitaciónpasiva está enfocada a la adaptación de laprótesis al muñón y al manejo de la misma,mediante ejercicios dirigidos al mejoramientodel equilibrio, así como también ejerciciospara el fortalecimiento del muñón gracias a
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 203
la acción del fisioterapeuta encargado. Enla rehabilitación activa el paciente cuentacon la competencia para realizar por supropia acción los ejercicios establecidos porel fisioterapeuta, tales como caminar sobrediferentes superficies como rampas, escaleraso el uso de bicicletas estáticas. Con loanterior se busca fortalecer el muñón, mejorarlas habilidades de movilidad con la prótesis,así como también mejorar las capacidadesaeróbicas del paciente [6], [7], [8].
Las bicicletas han sido utilizadas enla rehabilitación y en la valoración delas capacidades cinéticas y cinemáticas depersonas, por ejemplo, Ranky et al. [9]reportaron que agregar juegos a bicicletasestáticas ha permitido crear juegos derealidad virtual para rehabilitación física.
En la actualidad algunos de los métodosinvestigados para la rehabilitación depacientes son los juegos serios. Sawyer [10]los clasifica como aquellos que aprovechanlas bondades que ofrecen los videojuegos,destacando el entretenimiento como suprincipal virtud, para obtener un propósitomás útil. Miller et al. [11] plantean que sonaquellos que tienen un enfoque educativo envez del entretenimiento. En otras palabras,se puede entender como ‘serios’ los juegoscon propósitos de entrenamiento, educación,desarrollo de habilidades y rehabilitación,entre otros.
Se considera que alrededor del 40 % detodos los juegos serios están dirigidos a larehabilitación y a la salud, los cuales sehan desarrollado con el fin de brindar ayudaa personas con patologías en sus miembros[12]. Entre ellos se destacan los trabajosrealizados por Chen et al. [13], quienespresentaron el control de un videojuego pormedio de placas de fuerza, las cuales, ademásde brindar las indicaciones de movimientodentro del juego, sirven como indicadorde la fuerza normal aplicada para poderdeterminar la evolución en el desarrollode la potencia muscular. Domínguez yGarcía presentaron un cicloergómetro, el
cual consiste en una bicicleta para manos,donde el paciente maneja un videojuegode carreras de autos, en el cual, mediantelos impulsos en los pedales, se controla lavelocidad y la dirección del vehículo; esto esun incentivo para aumentar el consumo deoxígeno y la frecuencia cardiaca [14], [15].Ranky et al. [9] presentaron un sistemamodular para bicicletas estáticas con unainterfaz virtual para rehabilitación: el sistemafue desarrollado con el fin de monitorearparámetros fisiológicos y biomecánicos, yse compone de un computador para lasimulación y los procesos de adquisiciónde información, sensores de presión en elmanillar para hacer girar el jugador dentrode la pista y unidades de medición inercialen los pedales para medir la velocidad delpedaleo del usuario. El sistema fue probadocon 5 sujetos sanos. Otros sistemas permitenmedir, de manera indirecta mediante unsensor óptico de bajo costo, la velocidadde pedaleo [16], [17] y, otros utilizan elconcepto de sensores de fuerza en los pedales[9], [18]. Realizar esta lectura permite alfisioterapeuta comparar el miembro lesionadocon el miembro en buen estado, de formaque se puedan tener datos a medida que elpaciente realiza la rehabilitación, y por lotanto se pueda analizar su progreso.
Siendo conscientes de la problemáticade las MAP, se considera relevante diseñaruna solución para la rehabilitación demiembros inferiores para víctimas, por lotanto se presenta un desarrollo conceptualde un sistema de adquisición de datospara la rehabilitación. Dicha soluciónincorpora una bicicleta estática comercial,sensores de fuerza ubicados en los pedalesy un videojuego de carreras de autos, locual brinda una solución interactiva quepermite realizar ejercicios para mejorar lacoordinación interarticular e intermusculary, en caso de amputación, mejorar lapropiocepción con prótesis.
En el artículo primero se presenta unadescripción del sistema de adquisición de
204 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
datos para rehabilitación, sus componentes,funcionamiento y descripción de las pruebasrealizadas. Luego se muestran los resultadosde la caracterización de los sensores y delfuncionamiento del sistema, seguidamentese presentan los resultados de la encuestade percepción realizada a 20 fisioterapeutas.A continuación se analizan los resultadosobtenidos de los experimentos y, finalmente,se presentan las conclusiones y propuestaspara trabajos futuros.
DESCRIPCIÓN YCARACTERIZACIÓN DEL SISTEMA
Se desarrolla una solución que integra elejercicio sobre una bicicleta estática consensores y pulsadores de mando, fáciles deutilizar por pacientes en rehabilitación, y unvideojuego de automóviles.
Descripción del sistema
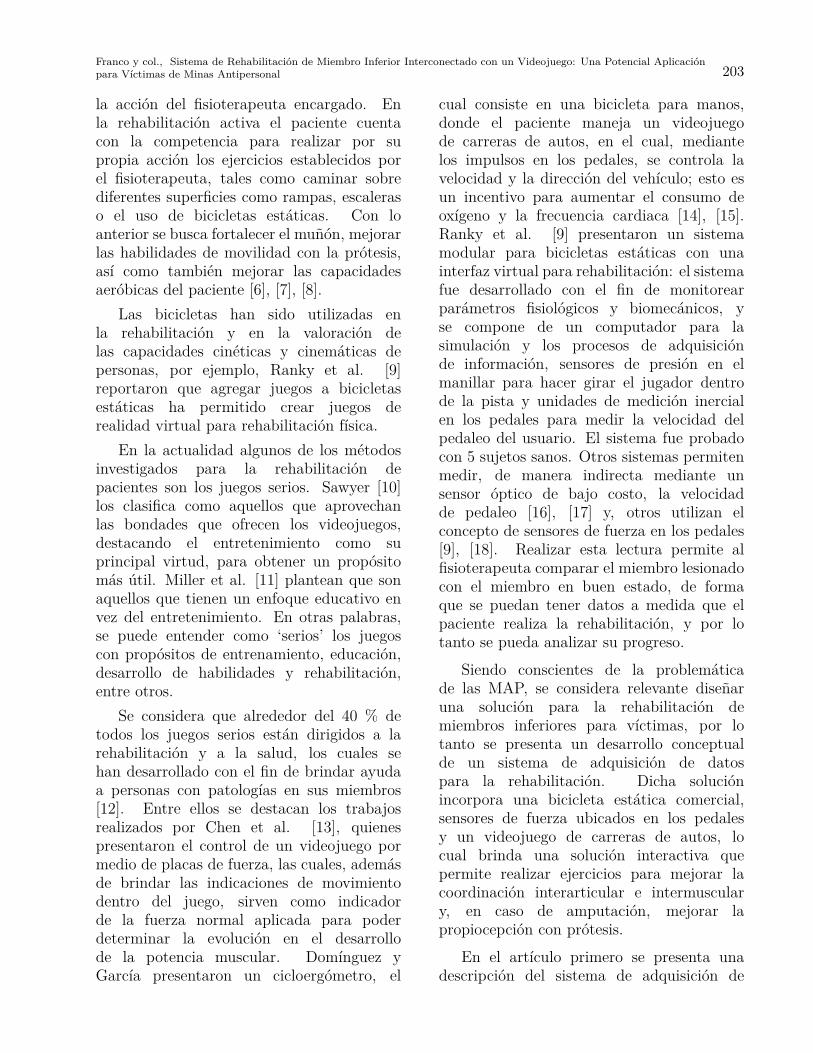
En la Figura 1 se presenta el sistema deadquisición de datos, allí se puede observar laubicación de los sensores de fuerza FlexiforceA201 en los pedales, un sensor ópticoTCRT5000 en la rueda de la bicicleta ypulsadores de mando en el manillar de labicicleta estática.
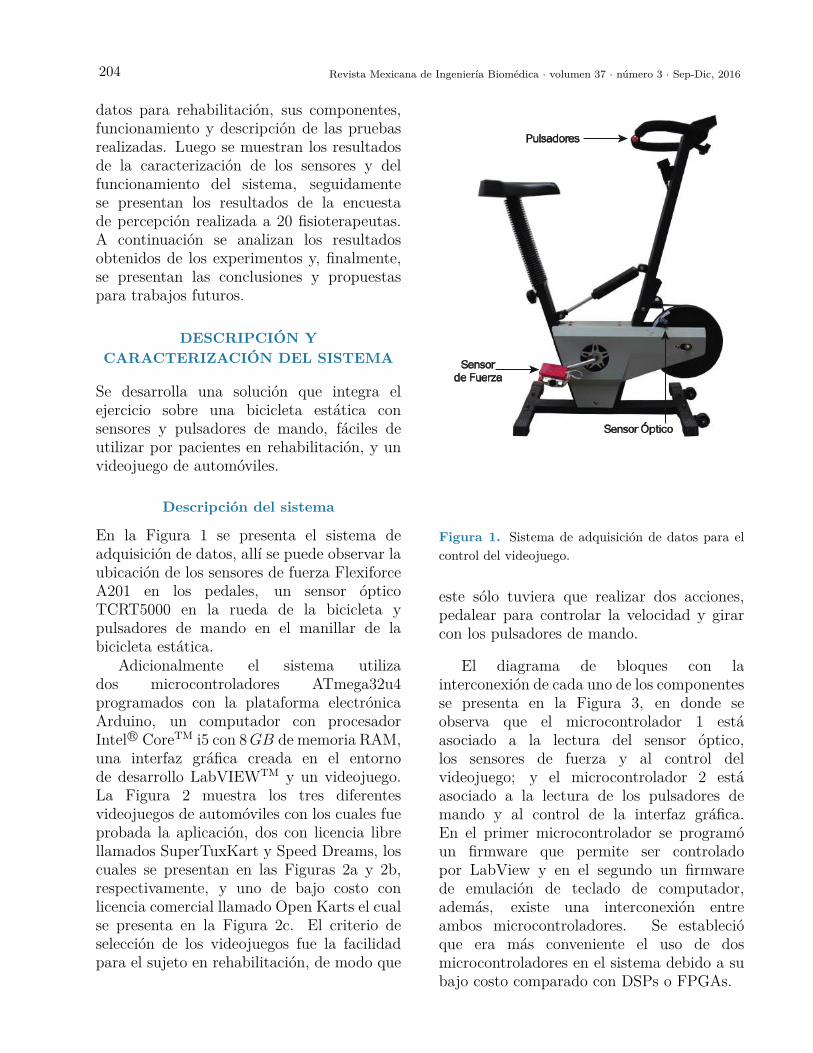
Adicionalmente el sistema utilizados microcontroladores ATmega32u4programados con la plataforma electrónicaArduino, un computador con procesadorIntel R© CoreTM i5 con 8GB de memoria RAM,una interfaz gráfica creada en el entornode desarrollo LabVIEWTM y un videojuego.La Figura 2 muestra los tres diferentesvideojuegos de automóviles con los cuales fueprobada la aplicación, dos con licencia librellamados SuperTuxKart y Speed Dreams, loscuales se presentan en las Figuras 2a y 2b,respectivamente, y uno de bajo costo conlicencia comercial llamado Open Karts el cualse presenta en la Figura 2c. El criterio deselección de los videojuegos fue la facilidadpara el sujeto en rehabilitación, de modo que
Pulsadores
Sensorde Fuerza
Sensor Óptico
Figura 1. Sistema de adquisición de datos para elcontrol del videojuego.
este sólo tuviera que realizar dos acciones,pedalear para controlar la velocidad y girarcon los pulsadores de mando.
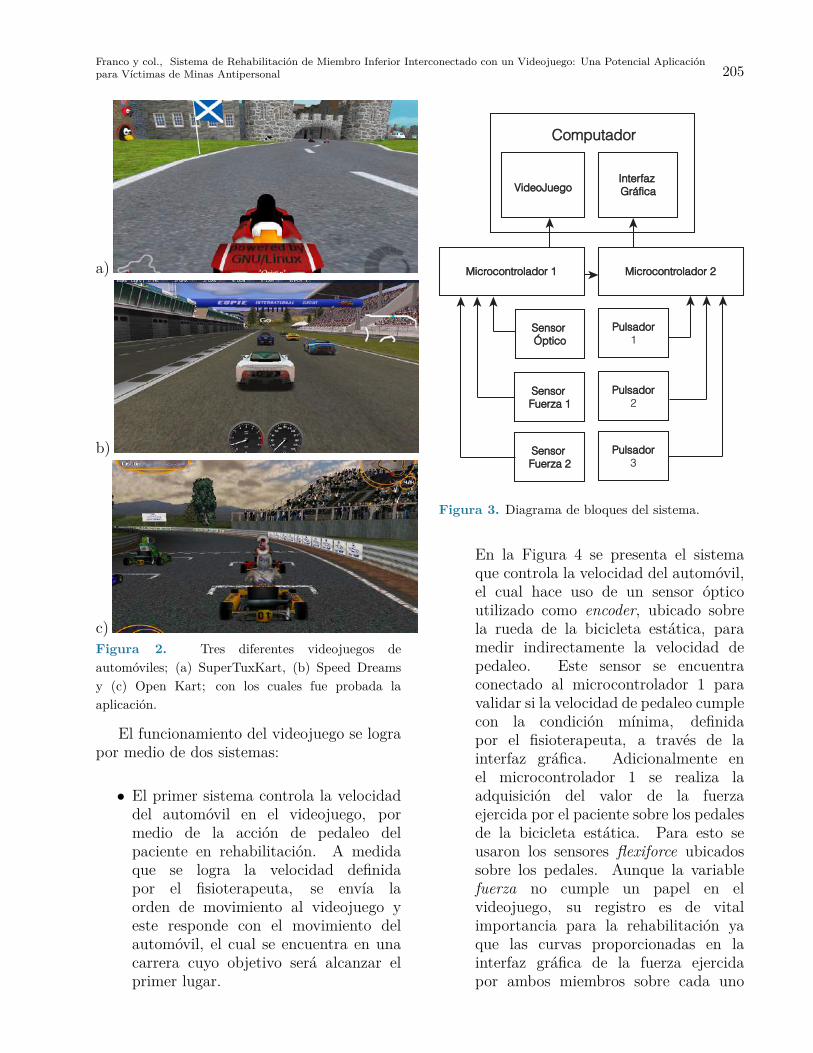
El diagrama de bloques con lainterconexión de cada uno de los componentesse presenta en la Figura 3, en donde seobserva que el microcontrolador 1 estáasociado a la lectura del sensor óptico,los sensores de fuerza y al control delvideojuego; y el microcontrolador 2 estáasociado a la lectura de los pulsadores demando y al control de la interfaz gráfica.En el primer microcontrolador se programóun firmware que permite ser controladopor LabView y en el segundo un firmwarede emulación de teclado de computador,además, existe una interconexión entreambos microcontroladores. Se establecióque era más conveniente el uso de dosmicrocontroladores en el sistema debido a subajo costo comparado con DSPs o FPGAs.
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 205
a)
b)
c)Figura 2. Tres diferentes videojuegos deautomóviles; (a) SuperTuxKart, (b) Speed Dreamsy (c) Open Kart; con los cuales fue probada laaplicación.
El funcionamiento del videojuego se lograpor medio de dos sistemas:
• El primer sistema controla la velocidaddel automóvil en el videojuego, pormedio de la acción de pedaleo delpaciente en rehabilitación. A medidaque se logra la velocidad definidapor el fisioterapeuta, se envía laorden de movimiento al videojuego yeste responde con el movimiento delautomóvil, el cual se encuentra en unacarrera cuyo objetivo será alcanzar elprimer lugar.
ComputadorComputador
VideoJuegoVideoJuegoInterfaz Interfaz GráficaGráfica
Microcontrolador 1Microcontrolador 1 Microcontrolador 2Microcontrolador 2
Sensor Sensor ÓpticoÓptico
Sensor Sensor Fuerza 1Fuerza 1
Sensor Sensor Fuerza 2Fuerza 2
PulsadorPulsador1
PulsadorPulsador2
PulsadorPulsador3
Figura 3. Diagrama de bloques del sistema.
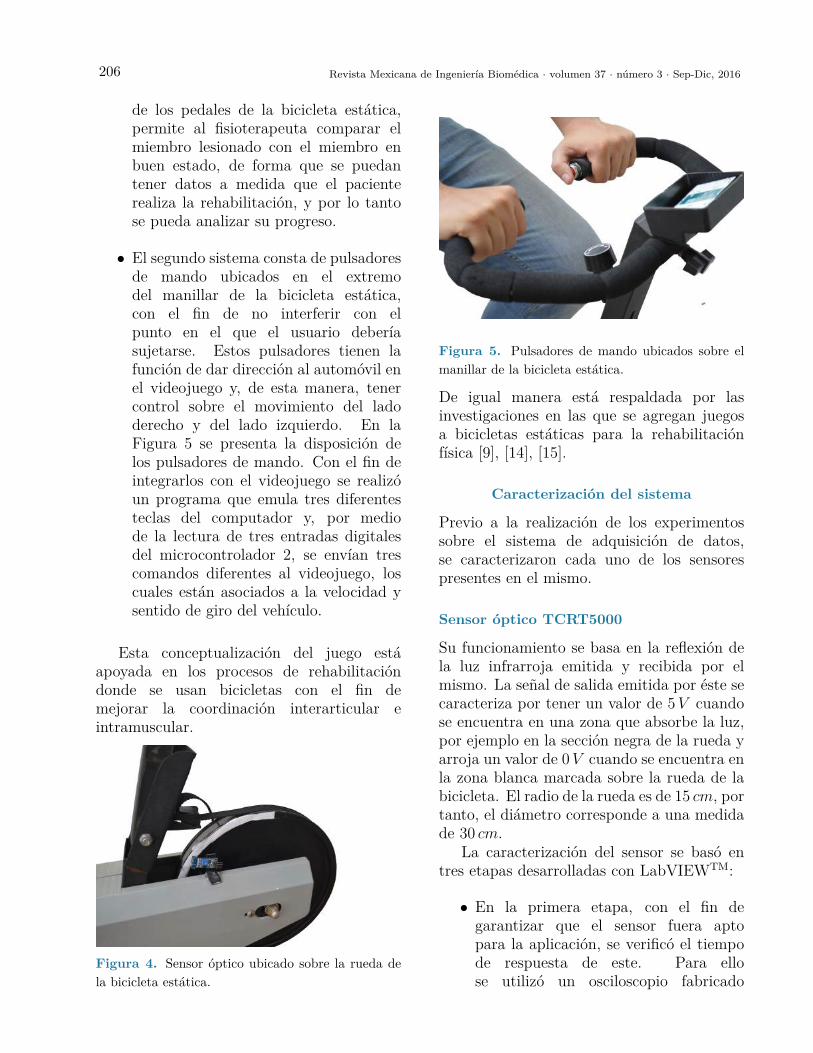
En la Figura 4 se presenta el sistemaque controla la velocidad del automóvil,el cual hace uso de un sensor ópticoutilizado como encoder, ubicado sobrela rueda de la bicicleta estática, paramedir indirectamente la velocidad depedaleo. Este sensor se encuentraconectado al microcontrolador 1 paravalidar si la velocidad de pedaleo cumplecon la condición mínima, definidapor el fisioterapeuta, a través de lainterfaz gráfica. Adicionalmente enel microcontrolador 1 se realiza laadquisición del valor de la fuerzaejercida por el paciente sobre los pedalesde la bicicleta estática. Para esto seusaron los sensores flexiforce ubicadossobre los pedales. Aunque la variablefuerza no cumple un papel en elvideojuego, su registro es de vitalimportancia para la rehabilitación yaque las curvas proporcionadas en lainterfaz gráfica de la fuerza ejercidapor ambos miembros sobre cada uno
206 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
de los pedales de la bicicleta estática,permite al fisioterapeuta comparar elmiembro lesionado con el miembro enbuen estado, de forma que se puedantener datos a medida que el pacienterealiza la rehabilitación, y por lo tantose pueda analizar su progreso.
• El segundo sistema consta de pulsadoresde mando ubicados en el extremodel manillar de la bicicleta estática,con el fin de no interferir con elpunto en el que el usuario deberíasujetarse. Estos pulsadores tienen lafunción de dar dirección al automóvil enel videojuego y, de esta manera, tenercontrol sobre el movimiento del ladoderecho y del lado izquierdo. En laFigura 5 se presenta la disposición delos pulsadores de mando. Con el fin deintegrarlos con el videojuego se realizóun programa que emula tres diferentesteclas del computador y, por mediode la lectura de tres entradas digitalesdel microcontrolador 2, se envían trescomandos diferentes al videojuego, loscuales están asociados a la velocidad ysentido de giro del vehículo.
Esta conceptualización del juego estáapoyada en los procesos de rehabilitacióndonde se usan bicicletas con el fin demejorar la coordinación interarticular eintramuscular.
Figura 4. Sensor óptico ubicado sobre la rueda dela bicicleta estática.
Figura 5. Pulsadores de mando ubicados sobre elmanillar de la bicicleta estática.
De igual manera está respaldada por lasinvestigaciones en las que se agregan juegosa bicicletas estáticas para la rehabilitaciónfísica [9], [14], [15].
Caracterización del sistema
Previo a la realización de los experimentossobre el sistema de adquisición de datos,se caracterizaron cada uno de los sensorespresentes en el mismo.
Sensor óptico TCRT5000
Su funcionamiento se basa en la reflexión dela luz infrarroja emitida y recibida por elmismo. La señal de salida emitida por éste secaracteriza por tener un valor de 5V cuandose encuentra en una zona que absorbe la luz,por ejemplo en la sección negra de la rueda yarroja un valor de 0V cuando se encuentra enla zona blanca marcada sobre la rueda de labicicleta. El radio de la rueda es de 15 cm, portanto, el diámetro corresponde a una medidade 30 cm.
La caracterización del sensor se basó entres etapas desarrolladas con LabVIEWTM:
• En la primera etapa, con el fin degarantizar que el sensor fuera aptopara la aplicación, se verificó el tiempode respuesta de este. Para ellose utilizó un osciloscopio fabricado

Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 207
por Agilent technologies con referenciaMSO-X 2014A y se detectó el tiempodel flanco de subida y de bajadaen la señal de salida del sensor, locual significa el tiempo que demorael sistema en detectar el cambio decolor. Con el valor medido se calculóla velocidad máxima con la que elusuario puede pedalear el equipo paraser correctamente monitoreado.
• En la segunda etapa se realizó ladigitalización de la señal mediante unconversor análogo digital de 8 bits, paraesto se estableció una lógica negada, enla que para valores mayores a 1V , elestado de la señal digital será off (0)y para valores menores a 1V , el estadode la señal digital será on (1).
• En la tercera etapa se capturaron lostiempos para cada uno de los estadosdel sensor, tanto para el estado on comopara el estado off, esto con el fin deimplementar un contador de pulsos paradeterminar el tiempo transcurrido encada vuelta de la rueda y de esta manerapoder calcular la velocidad de pedaleo.
Teniendo en cuenta el resultado deltiempo de respuesta del sensor y el cálculo develocidad máxima que este puede detectar,se analiza que no existe limitante para eluso del sistema en rehabilitación, inclusoque es posible utilizarlo en sesiones deentrenamiento en personas sanas o endeportistas de alto rendimiento. Es deanotar que el límite del sensor significa lavelocidad máxima que detecta, es decir, sila velocidad es muy baja como se espera enpacientes en procesos de rehabilitación nohay ningún inconveniente porque siempre semedirá correctamente la velocidad.
Dado que la señal de aceleración del autodentro del videojuego está dada por unavalidación de tiempo entre cada uno de lospulsos del sensor, se realizó un control deltiempo mínimo entre estos, con el fin dedar el ajuste óptimo según sea el progreso
de la rehabilitación del paciente. En otraspalabras, cuanto más avanzado sea el procesode rehabilitación del paciente, se podráajustar un tiempo más corto, de forma que elesfuerzo que deberá realizar el paciente serámayor para lograr sobrepasar dicho ajuste y,por lo tanto, tendrá que realizar el ejercicio auna mayor velocidad.
Sensores de fuerza Flexiforce A201
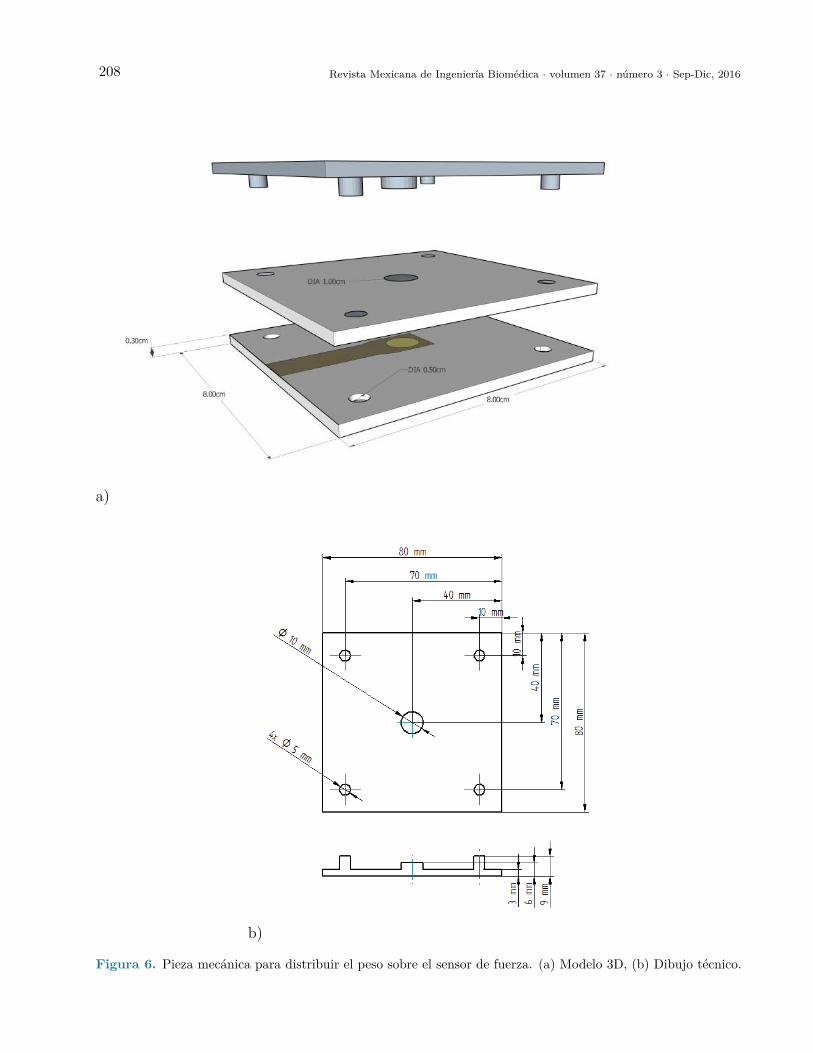
Dado que el área sensible del sensor A201es pequeña, se diseñó en acrílico la piezamecánica que se muestra en la Figura 6, quepermitiera distribuir la fuerza sobre el áreasensible del sensor.
Para caracterizar los sensores de fuerza seimplementó un circuito divisor de tensión enel que una de las resistencias era el sensor defuerza y la otra era una con un valor nominalde 100 kΩ. Con este circuito implementadose procedió a aplicar 11 diferentes pesoscalibrados, directamente sobre el sensor, conel fin de obtener una curva característica paracada uno de los sensores y poder determinarla relación entre el peso aplicado y la tensión ovoltaje de salida. Estos pesos se aumentaronen pasos de 0.5 kg, entre 0 kg y 5 kg haciendotres repeticiones en cada registro, para untotal de 33 datos. El valor de la tensiónobtenida a la salida del circuito se midiócon el microcontrolador 1 a través de unconversor análogo digital de 8 bits. Los tresdatos correspondientes al mismo peso fueronpromediados y con los datos obtenidos, serealizó una regresión lineal para obtener unmodelo lineal con el fin de calibrar el sistema.Se realizó una comparación entre los valoresreales de cada uno de los pesos calibradosy los valores calculados en LabVIEWTM
mediante el uso de los datos entregados porlos sensores y la ecuación así obtenida.
Las medidas tomadas para el experimentodescrito son suficientes teniendo en cuentala regla de oro reportada por Harrell et al.[19] y por Peduzzi et al. [20] donde paratener resultados confiables en un modelode regresión lineal se requieren mínimo 10
208 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
a)
b)
Figura 6. Pieza mecánica para distribuir el peso sobre el sensor de fuerza. (a) Modelo 3D, (b) Dibujo técnico.
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 209
eventos por variable independiente, con locual para el caso específico que se presentase requerirían 20 datos
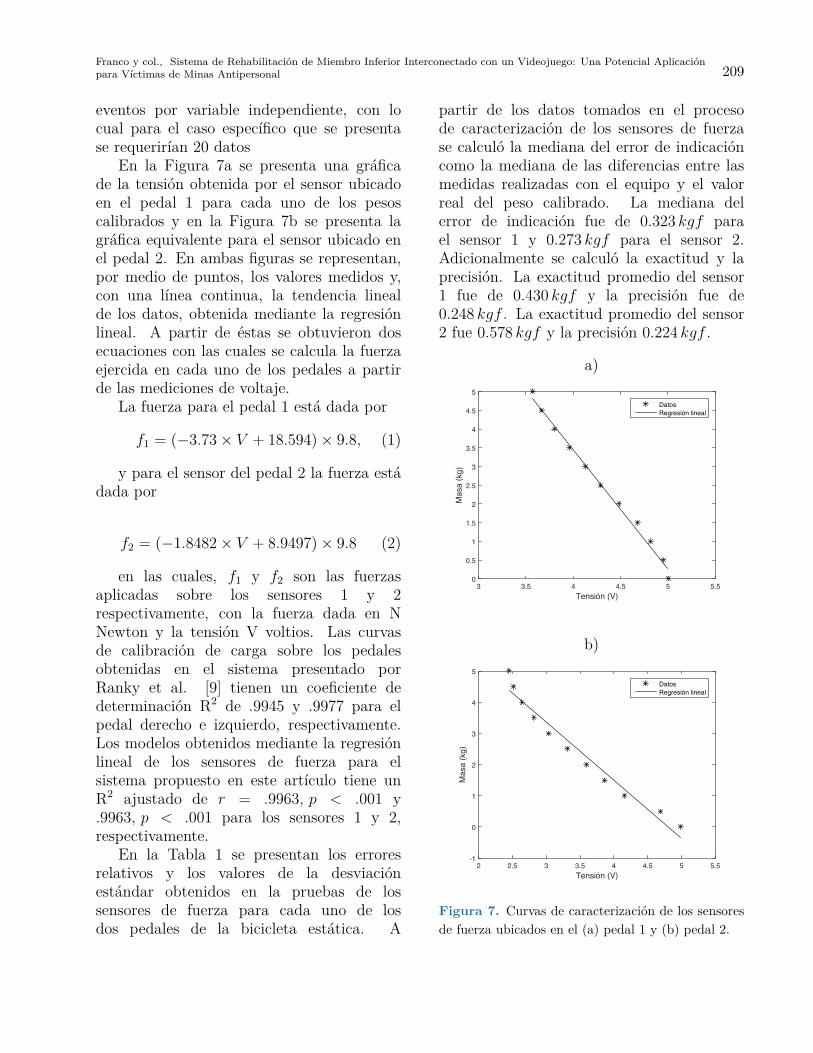
En la Figura 7a se presenta una gráficade la tensión obtenida por el sensor ubicadoen el pedal 1 para cada uno de los pesoscalibrados y en la Figura 7b se presenta lagráfica equivalente para el sensor ubicado enel pedal 2. En ambas figuras se representan,por medio de puntos, los valores medidos y,con una línea continua, la tendencia linealde los datos, obtenida mediante la regresiónlineal. A partir de éstas se obtuvieron dosecuaciones con las cuales se calcula la fuerzaejercida en cada uno de los pedales a partirde las mediciones de voltaje.
La fuerza para el pedal 1 está dada por
f1 = (−3.73 × V + 18.594) × 9.8, (1)
y para el sensor del pedal 2 la fuerza estádada por
f2 = (−1.8482 × V + 8.9497) × 9.8 (2)
en las cuales, f1 y f2 son las fuerzasaplicadas sobre los sensores 1 y 2respectivamente, con la fuerza dada en NNewton y la tensión V voltios. Las curvasde calibración de carga sobre los pedalesobtenidas en el sistema presentado porRanky et al. [9] tienen un coeficiente dedeterminación R2 de .9945 y .9977 para elpedal derecho e izquierdo, respectivamente.Los modelos obtenidos mediante la regresiónlineal de los sensores de fuerza para elsistema propuesto en este artículo tiene unR2 ajustado de r = .9963, p < .001 y.9963, p < .001 para los sensores 1 y 2,respectivamente.
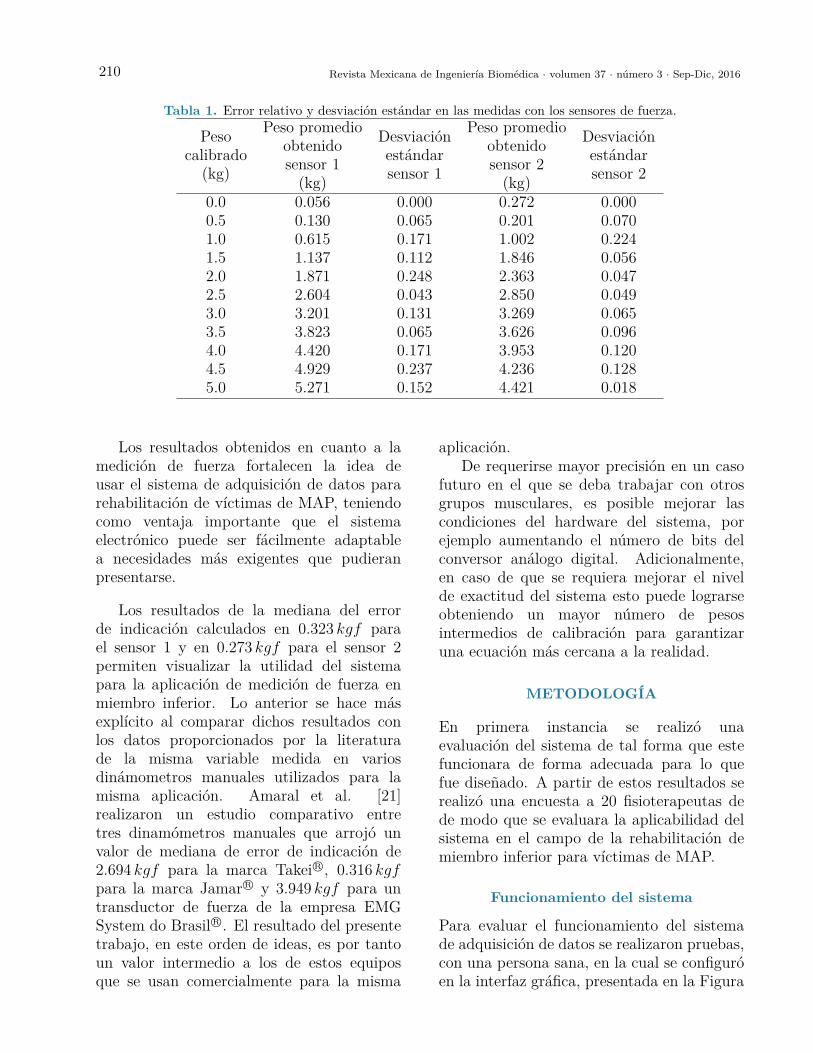
En la Tabla 1 se presentan los erroresrelativos y los valores de la desviaciónestándar obtenidos en la pruebas de lossensores de fuerza para cada uno de losdos pedales de la bicicleta estática. A
partir de los datos tomados en el procesode caracterización de los sensores de fuerzase calculó la mediana del error de indicacióncomo la mediana de las diferencias entre lasmedidas realizadas con el equipo y el valorreal del peso calibrado. La mediana delerror de indicación fue de 0.323 kgf parael sensor 1 y 0.273 kgf para el sensor 2.Adicionalmente se calculó la exactitud y laprecisión. La exactitud promedio del sensor1 fue de 0.430 kgf y la precisión fue de0.248 kgf . La exactitud promedio del sensor2 fue 0.578 kgf y la precisión 0.224 kgf .
a)
Tensión (V)3 3.5 4 4.5 5 5.5
Mas
a (k
g)
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5DatosRegresión lineal
b)
Tensión (V)2 2.5 3 3.5 4 4.5 5 5.5
Mas
a (k
g)
-1
0
1
2
3
4
5DatosRegresión lineal
Figura 7. Curvas de caracterización de los sensoresde fuerza ubicados en el (a) pedal 1 y (b) pedal 2.
210 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
Tabla 1. Error relativo y desviación estándar en las medidas con los sensores de fuerza.
Pesocalibrado
(kg)
Peso promedioobtenidosensor 1(kg)
Desviaciónestándarsensor 1
Peso promedioobtenidosensor 2(kg)
Desviaciónestándarsensor 2
0.0 0.056 0.000 0.272 0.0000.5 0.130 0.065 0.201 0.0701.0 0.615 0.171 1.002 0.2241.5 1.137 0.112 1.846 0.0562.0 1.871 0.248 2.363 0.0472.5 2.604 0.043 2.850 0.0493.0 3.201 0.131 3.269 0.0653.5 3.823 0.065 3.626 0.0964.0 4.420 0.171 3.953 0.1204.5 4.929 0.237 4.236 0.1285.0 5.271 0.152 4.421 0.018
Los resultados obtenidos en cuanto a lamedición de fuerza fortalecen la idea deusar el sistema de adquisición de datos pararehabilitación de víctimas de MAP, teniendocomo ventaja importante que el sistemaelectrónico puede ser fácilmente adaptablea necesidades más exigentes que pudieranpresentarse.
Los resultados de la mediana del errorde indicación calculados en 0.323 kgf parael sensor 1 y en 0.273 kgf para el sensor 2permiten visualizar la utilidad del sistemapara la aplicación de medición de fuerza enmiembro inferior. Lo anterior se hace másexplícito al comparar dichos resultados conlos datos proporcionados por la literaturade la misma variable medida en variosdinámometros manuales utilizados para lamisma aplicación. Amaral et al. [21]realizaron un estudio comparativo entretres dinamómetros manuales que arrojó unvalor de mediana de error de indicación de2.694 kgf para la marca Takei R©, 0.316 kgfpara la marca Jamar R© y 3.949 kgf para untransductor de fuerza de la empresa EMGSystem do Brasil R©. El resultado del presentetrabajo, en este orden de ideas, es por tantoun valor intermedio a los de estos equiposque se usan comercialmente para la misma
aplicación.De requerirse mayor precisión en un caso
futuro en el que se deba trabajar con otrosgrupos musculares, es posible mejorar lascondiciones del hardware del sistema, porejemplo aumentando el número de bits delconversor análogo digital. Adicionalmente,en caso de que se requiera mejorar el nivelde exactitud del sistema esto puede lograrseobteniendo un mayor número de pesosintermedios de calibración para garantizaruna ecuación más cercana a la realidad.
METODOLOGÍA
En primera instancia se realizó unaevaluación del sistema de tal forma que estefuncionara de forma adecuada para lo quefue diseñado. A partir de estos resultados serealizó una encuesta a 20 fisioterapeutas dede modo que se evaluara la aplicabilidad delsistema en el campo de la rehabilitación demiembro inferior para víctimas de MAP.
Funcionamiento del sistema
Para evaluar el funcionamiento del sistemade adquisición de datos se realizaron pruebas,con una persona sana, en la cual se configuróen la interfaz gráfica, presentada en la Figura
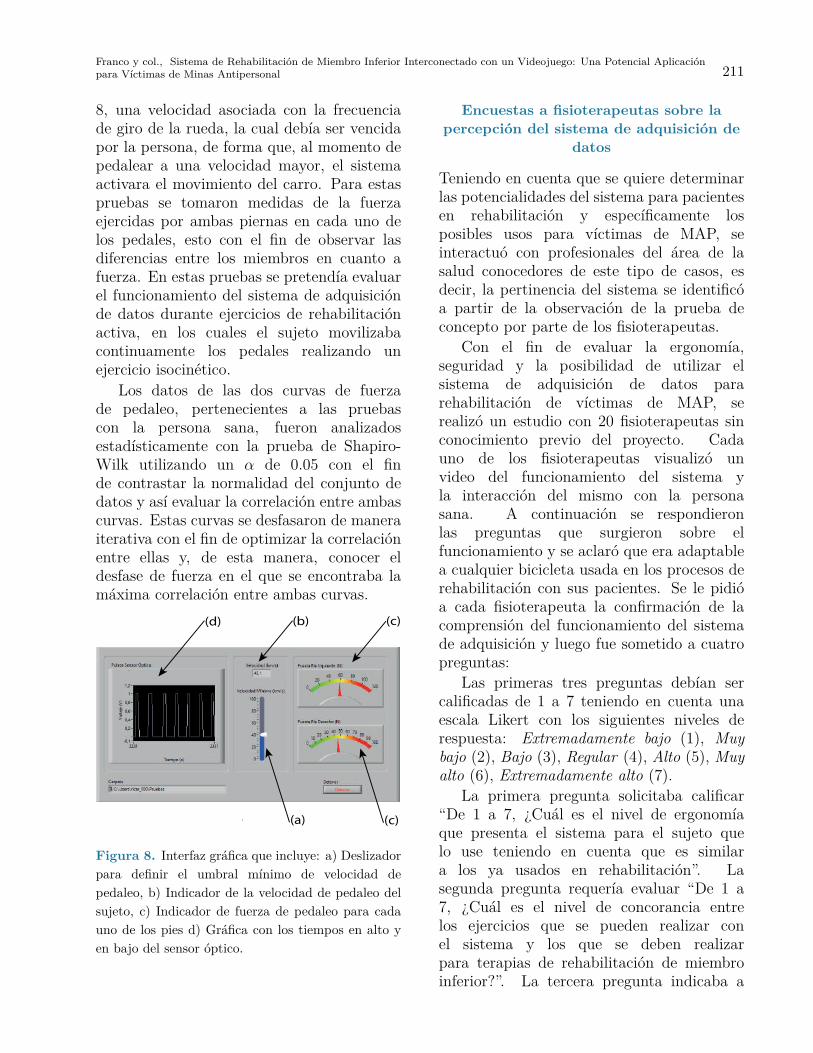
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 211
8, una velocidad asociada con la frecuenciade giro de la rueda, la cual debía ser vencidapor la persona, de forma que, al momento depedalear a una velocidad mayor, el sistemaactivara el movimiento del carro. Para estaspruebas se tomaron medidas de la fuerzaejercidas por ambas piernas en cada uno delos pedales, esto con el fin de observar lasdiferencias entre los miembros en cuanto afuerza. En estas pruebas se pretendía evaluarel funcionamiento del sistema de adquisiciónde datos durante ejercicios de rehabilitaciónactiva, en los cuales el sujeto movilizabacontinuamente los pedales realizando unejercicio isocinético.
Los datos de las dos curvas de fuerzade pedaleo, pertenecientes a las pruebascon la persona sana, fueron analizadosestadísticamente con la prueba de Shapiro-Wilk utilizando un α de 0.05 con el finde contrastar la normalidad del conjunto dedatos y así evaluar la correlación entre ambascurvas. Estas curvas se desfasaron de maneraiterativa con el fin de optimizar la correlaciónentre ellas y, de esta manera, conocer eldesfase de fuerza en el que se encontraba lamáxima correlación entre ambas curvas.
(a)
(b)
(c)
(c)(d)
Figura 8. Interfaz gráfica que incluye: a) Deslizadorpara definir el umbral mínimo de velocidad depedaleo, b) Indicador de la velocidad de pedaleo delsujeto, c) Indicador de fuerza de pedaleo para cadauno de los pies d) Gráfica con los tiempos en alto yen bajo del sensor óptico.
Encuestas a fisioterapeutas sobre lapercepción del sistema de adquisición de
datos
Teniendo en cuenta que se quiere determinarlas potencialidades del sistema para pacientesen rehabilitación y específicamente losposibles usos para víctimas de MAP, seinteractuó con profesionales del área de lasalud conocedores de este tipo de casos, esdecir, la pertinencia del sistema se identificóa partir de la observación de la prueba deconcepto por parte de los fisioterapeutas.
Con el fin de evaluar la ergonomía,seguridad y la posibilidad de utilizar elsistema de adquisición de datos pararehabilitación de víctimas de MAP, serealizó un estudio con 20 fisioterapeutas sinconocimiento previo del proyecto. Cadauno de los fisioterapeutas visualizó unvideo del funcionamiento del sistema yla interacción del mismo con la personasana. A continuación se respondieronlas preguntas que surgieron sobre elfuncionamiento y se aclaró que era adaptablea cualquier bicicleta usada en los procesos derehabilitación con sus pacientes. Se le pidióa cada fisioterapeuta la confirmación de lacomprensión del funcionamiento del sistemade adquisición y luego fue sometido a cuatropreguntas:
Las primeras tres preguntas debían sercalificadas de 1 a 7 teniendo en cuenta unaescala Likert con los siguientes niveles derespuesta: Extremadamente bajo (1), Muybajo (2), Bajo (3), Regular (4), Alto (5), Muyalto (6), Extremadamente alto (7).
La primera pregunta solicitaba calificar“De 1 a 7, ¿Cuál es el nivel de ergonomíaque presenta el sistema para el sujeto quelo use teniendo en cuenta que es similara los ya usados en rehabilitación”. Lasegunda pregunta requería evaluar “De 1 a7, ¿Cuál es el nivel de concorancia entrelos ejercicios que se pueden realizar conel sistema y los que se deben realizarpara terapias de rehabilitación de miembroinferior?”. La tercera pregunta indicaba a
212 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
los fisioterapeutas que debían calificar “De1 a 7, ¿Cuál es el nivel de seguridad delsistema, teniendo en cuenta que no le hagadaño físico al paciente? ”. Finalmente, lacuarta pregunta pretendía que respondieran“Para qué terapias que requieran los pacientesvíctimas de MAP con prótesis sería útil estesistema”, esto con el fin de descubrir lapercepción sobre las potenciales aplicacionesdel sistema para rehabilitación de personasvíctimas de MAP. En este caso se lesdió una gama con las siguientes diezposibilidades y cada fisioterapeuta debíaindicar para cada una si era o no unode los posibles usos o aplicaciones queel sistema podía tener para una personaprotetizada como consecuencia de MAP:(a)reacondicionamiento cardio-respiratorio, (b)calidad muscular del lado no afectado, (c)movilidad y adaptación del socket, (d)retorno venoso, (e) retorno linfático, (f)ayuda para pacientes inmunosuprimidos, (g)resistencia a la fuerza, (h) autoestima, (i)seguridad y (j) autoimagen.
Cada fisioterapeuta tenía adicionalmentela posibilidad de incluir aplicacionespotenciales que no estuvieran en ellistado suministrado y hacer comentarios uobservaciones generales sobre el desarrollo.Los resultados obtenidos fueron tabuladospara posteriormente ser analizados.
RESULTADOS Y DISCUSIÓN
Se presentan los resultados de las pruebasdel sistema de adquisición de datos paracaracterizar cada uno de los sensores.Primero se muestran los resultados delas pruebas relacionadas con el sensoróptico, luego se presentan los resultadoscorrespondientes a los sensores de fuerza,posteriormente se presentan los resultados defuncionamiento del sistema completo. Porúltimo se presentan los resultados de laencuesta de percepción de los fisioterapeutas.
Tiempo (s)0 1 2 3 4 5 6 7 8 9 10
Fuer
za (N
)
5
10
15
20
25
30
35
40
45
50
55Sensor 1Sensor 2
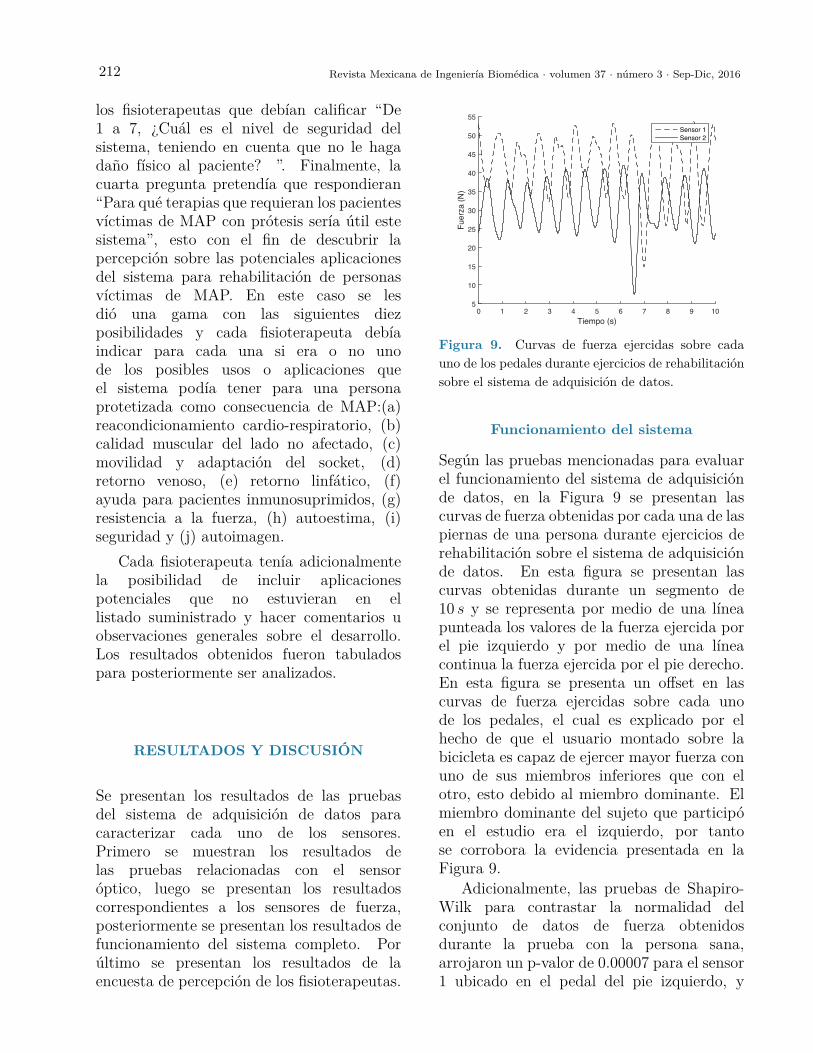
Figura 9. Curvas de fuerza ejercidas sobre cadauno de los pedales durante ejercicios de rehabilitaciónsobre el sistema de adquisición de datos.
Funcionamiento del sistema
Según las pruebas mencionadas para evaluarel funcionamiento del sistema de adquisiciónde datos, en la Figura 9 se presentan lascurvas de fuerza obtenidas por cada una de laspiernas de una persona durante ejercicios derehabilitación sobre el sistema de adquisiciónde datos. En esta figura se presentan lascurvas obtenidas durante un segmento de10 s y se representa por medio de una líneapunteada los valores de la fuerza ejercida porel pie izquierdo y por medio de una líneacontinua la fuerza ejercida por el pie derecho.En esta figura se presenta un offset en lascurvas de fuerza ejercidas sobre cada unode los pedales, el cual es explicado por elhecho de que el usuario montado sobre labicicleta es capaz de ejercer mayor fuerza conuno de sus miembros inferiores que con elotro, esto debido al miembro dominante. Elmiembro dominante del sujeto que participóen el estudio era el izquierdo, por tantose corrobora la evidencia presentada en laFigura 9.
Adicionalmente, las pruebas de Shapiro-Wilk para contrastar la normalidad delconjunto de datos de fuerza obtenidosdurante la prueba con la persona sana,arrojaron un p-valor de 0.00007 para el sensor1 ubicado en el pedal del pie izquierdo, y
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 213
0.00008 para el sensor 2 ubicado en el pedaldel pie derecho. Debido a que el valor pobtenido en ambas pruebas es menor a 0.05,se puede rechazar la idea que la fuerza depedaleo proviene de una distribución normalcon un nivel de confianza del 95%. Lacorrelación de Spearman máxima se obtuvocon un desplazamiento de 0.419ms y fue de0.873 con un p-valor de 0.00001. En estecaso se utilizó la correlación de Spearmanen vez de la correlación de Pearson, ya quepara la segunda al menos una de las variablesdebe seguir una distribución de frecuenciasnormal y en este caso se rechazó el supuestode normalidad.
El funcionamiento final del sistema contodos los sensores y dispositivos acopladosa éste tuvo los resultados esperados puestoque se logró realizar el control del avancedel auto dentro del videojuego mediante elmovimiento de los pedales de la bicicletapor parte de una persona, a la vez que secontrolaba la dirección del mismo, mediantelos pulsadores de mando ubicados en losextremos del manillar.
El terapeuta puede establecer velocidadesmínimas que con el progreso de larehabilitación van cambiando permitiendoun seguimiento cuantitativo, de hecho, lavelocidad que logra medir el sensor supera laque puede tener un paciente en condicionesde rehabilitación, por lo cual no hay ningúninconveniente desde el punto de vista técnicoen este sentido.
Adicionalmente, en la Figura 9, se muestracómo se logró realizar un monitoreo continuode la fuerza normal ejercida sobre los pedalesde la bicicleta. Posteriormente, dichainformación se exportó a una hoja de datos,con el fin de recuperar las gráficas de la fuerzaque son previamente mostradas en la interfazgráfica al fisioterapeuta, para así realizar unanálisis de esta información y obtener losvalores máximos, mínimos, promedios, entreotros, de la fuerza ejercida por cada uno delos miembros inferiores de la persona. Conestos valores, es posible determinar si existe,
o no, un aumento en las mediciones de fuerza,lo que a su vez servirá para corroborar sihay progreso en el desarrollo de la fuerza delpaciente y, por ende, analizar el estado delproceso de rehabilitación.
En la Figura 9 se observa que las fuerzaestán desfasadas 180 . Esto se debe a queen el momento en que uno de los pedales seencuentra en subida, el otro se encuentra debajada.
Las pruebas experimentales y sus análisis,por tanto, confirmaron la correcta escogenciade los sensores para la aplicación.
Adicionalmente, las pruebas de Shapiro-Wilk para contrastar la normalidad delconjunto de datos de fuerza obtenidosdurante la prueba con la persona sana,arrojaron un p-valor de 0.00007 para el sensor1 ubicado en el pedal del pie izquierdo, y0.00008 para el sensor 2 ubicado en el pedaldel pie derecho. Debido a que el valor pobtenido en ambas pruebas es menor a 0.05,se puede rechazar la idea que la fuerza depedaleo proviene de una distribución normalcon un nivel de confianza del 95%. Lacorrelación de Spearman máxima se obtuvocon un desplazamiento de 0.419ms y fue de0.873 con un p-valor de 0.00001. En estecaso se utilizó la correlación de Spearmanen vez de la correlación de Pearson, ya quepara la segunda al menos una de las variablesdebe seguir una distribución de frecuenciasnormal y en este caso se rechazó el supuestode normalidad.
El funcionamiento final del sistema contodos los sensores y dispositivos acopladosa éste tuvo los resultados esperados puestoque se logró realizar el control del avancedel auto dentro del videojuego mediante elmovimiento de los pedales de la bicicletapor parte de una persona, a la vez que secontrolaba la dirección del mismo, mediantelos pulsadores de mando ubicados en losextremos del manillar.
El terapeuta puede establecer velocidadesmínimas que con el progreso de larehabilitación van cambiando permitiendo
214 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
un seguimiento cuantitativo, de hecho, lavelocidad que logra medir el sensor supera laque puede tener un paciente en condicionesde rehabilitación, por lo cual no hay ningúninconveniente desde el punto de vista técnicoen este sentido.
Adicionalmente, en la Figura ??, semuestra cómo se logró realizar un monitoreocontinuo de la fuerza normal ejercida sobre lospedales de la bicicleta. Posteriormente, dichainformación se exportó a una hoja de datos,con el fin de recuperar las gráficas de la fuerzaque son previamente mostradas en la interfazgráfica al fisioterapeuta, para así realizar unanálisis de esta información y obtener losvalores máximos, mínimos, promedios, entreotros, de la fuerza ejercida por cada uno delos miembros inferiores de la persona. Conestos valores, es posible determinar si existe,o no, un aumento en las mediciones de fuerza,lo que a su vez servirá para corroborar sihay progreso en el desarrollo de la fuerza delpaciente y, por ende, analizar el estado delproceso de rehabilitación.
En la Figura 9 se observa que las fuerzaestán desfasadas 180 . Esto se debe a queen el momento en que uno de los pedales seencuentra en subida, el otro se encuentra debajada.
Las pruebas experimentales y sus análisis,por tanto, confirmaron la correcta escogenciade los sensores para la aplicación.
Encuestas a fisioterapeutas sobre lapercepción del sistema de adquisición de
datos
Los 20 encuestados son profesionales delárea de la fisioterapia, egresados de 3universidades privadas colombianas, 4de ellos especialistas y 4 estudiantes deespecialización. Respecto a los años deexperiencia profesional 3 tienen más de 10años de experiencia, 3 tienen entre 5 y 10años de experiencia, 12 tienen de 2 a 5 añosde experiencia y 2 tienen de 0 a 2 años de
experiencia.Los resultados de la encuesta a los
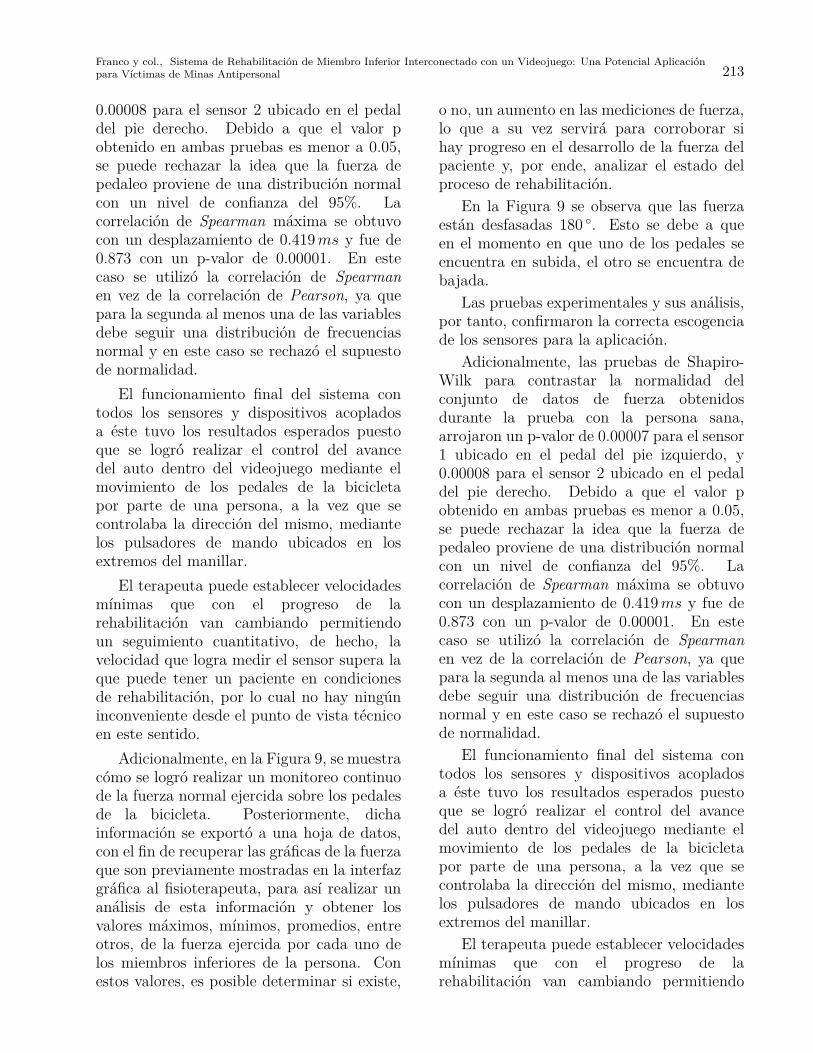
fisioterapeutas en cuanto a ergonomía,seguridad y concordancia de los ejercicioscon los de la terapia tradicional se presentanagrupados en una escala dicotómica en laTabla 2. De acuerdo con esta escalalas respuestas con una valoración de Alto,Muy alto o Extremadamente alto fueronagrupadas en la categoría Alto; mientrasque las respuestas con una valoración deRegular, Bajo, Muy bajo o Extremadamentebajo fueron agrupadas en la categoría Bajo.
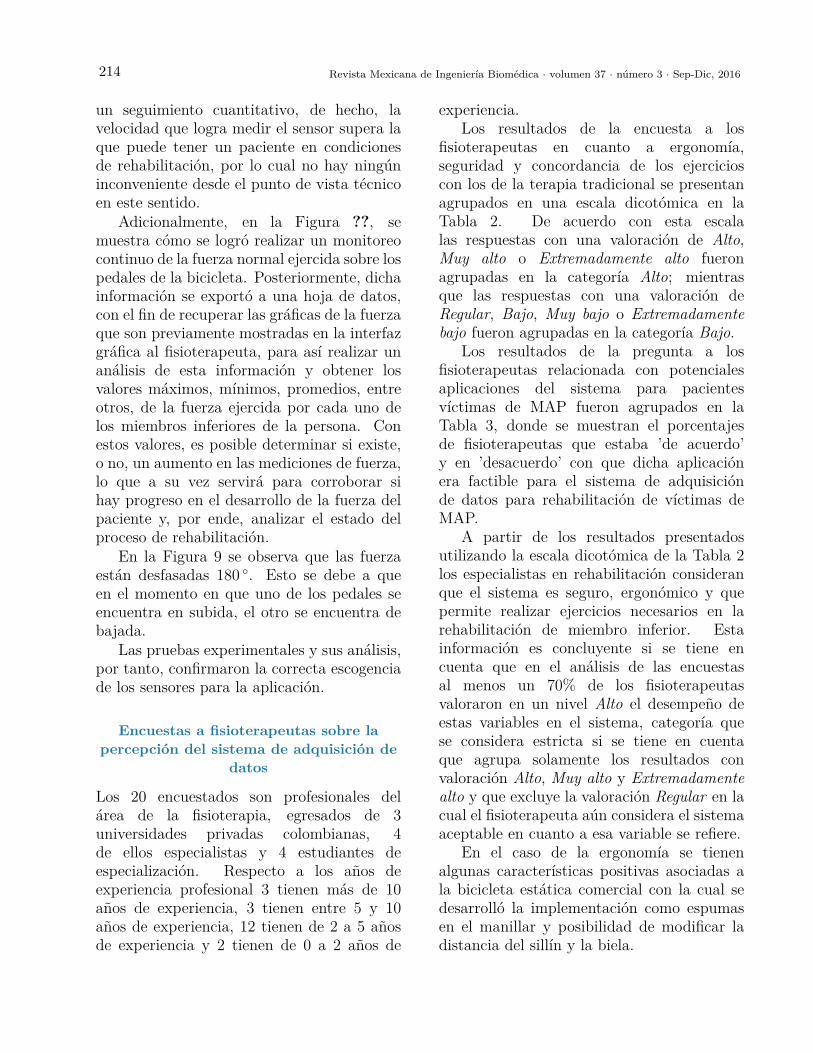
Los resultados de la pregunta a losfisioterapeutas relacionada con potencialesaplicaciones del sistema para pacientesvíctimas de MAP fueron agrupados en laTabla 3, donde se muestran el porcentajesde fisioterapeutas que estaba ’de acuerdo’y en ’desacuerdo’ con que dicha aplicaciónera factible para el sistema de adquisiciónde datos para rehabilitación de víctimas deMAP.
A partir de los resultados presentadosutilizando la escala dicotómica de la Tabla 2los especialistas en rehabilitación consideranque el sistema es seguro, ergonómico y quepermite realizar ejercicios necesarios en larehabilitación de miembro inferior. Estainformación es concluyente si se tiene encuenta que en el análisis de las encuestasal menos un 70% de los fisioterapeutasvaloraron en un nivel Alto el desempeño deestas variables en el sistema, categoría quese considera estricta si se tiene en cuentaque agrupa solamente los resultados convaloración Alto, Muy alto y Extremadamentealto y que excluye la valoración Regular en lacual el fisioterapeuta aún considera el sistemaaceptable en cuanto a esa variable se refiere.
En el caso de la ergonomía se tienenalgunas características positivas asociadas ala bicicleta estática comercial con la cual sedesarrolló la implementación como espumasen el manillar y posibilidad de modificar ladistancia del sillín y la biela.
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 215
Tabla 2. Resultados de percepción de fisioterapeutas en cuanto al nivel de ergonomía,seguridad y concordancia de los ejercicios con los de la terapia tradicional.
Característica Alto(#/Total)
Alto(%)
Bajo(#/Total)
Bajo(%)
Ergonomía 14/20 70 6/20 30Concordancia 16/20 80 4/20 20Seguridad 18/20 90 2/20 10
Tabla 3. Potenciales aplicaciones del sistema para personas víctimas de MAP.
Característica Si(#/Total)
Si(%)
No(#/Total)
No(%)
Reacondicionamiento cardio-respiratorio 19/20 95 1/20 5Calidad muscular del lado no afectado 20/20 100 0/20 20Movilidad y adaptación del socket 17/20 85 3/20 15Retorno Venoso 19/20 95 1/20 5Retorno Linfático 19/20 95 1/20 5Ayuda para pacientes inmunosuprimidos 12/20 60 8/20 40Resistencia a la fuerza 19/20 95 1/20 5Autoestima 19/20 95 1/20 5Seguridad 20/20 100 0/20 0Autoimagen 18/20 90 2/20 10
Adicionalmente es posible adaptar elsistema de adquisición de datos a unabicicleta estática que posea una silla conespaldar, donde el paciente pueda estar másreclinado y con el peso mejor distribuido en lasilla, de tal manera que se sienta más cómodoy seguro al realizar el ejercicio. Por tantoel sistema desarrollado puede adaptarse sininconvenientes a una bicicleta con mejorescaracterísticas para un paciente víctima deMAP.
En el caso de la seguridad aplicancondiciones similares a la ergonomía, dadoque el sistema por sí mismo incluye lascondiciones asociadas con una bicicletaestática que ya es usada en los procesos derehabilitación de miembro inferior.
Las observaciones generales proporcionadaspor los fisioterapeutas, permitieronidentificar otros potenciales usos en elproceso de rehabilitación de víctimas deMAP: reacondicionamiento del miembrofaltante, resistencia, fuerza, propiocepcióny coordinación, autoconfianza, motivación,actividad física independiente de sucondición, complemento al proceso deentrenamiento de marcha, coordinación
interarticular e intermuscular, mejoría delengrama motor y mejoría del equilibrioy control postural. Estas últimaspotencialidades, dado que fueron ideas dealgunos terapeutas deben ser corroboradascon una muestra superior.
Los hallazgos anteriores van de acuerdocon investigaciones preliminares donde semuestra que con el uso de bicicletas estáticasen rehabilitación se puede fortalecer elmuñón, mejorar las habilidades de movilidadcon la prótesis y mejorar las capacidadesaeróbicas del paciente [6], [7], [8].
Teniendo en cuenta que los fisioterapeutasfueron formados y tienen experiencia laboralen el segundo país más afectado por MAPen el mundo y por tanto conocimiento delas terapias de rehabilitación para estaslesiones, las encuestas también permitieronidentificar potencialidades que el sistematiene en terapias para estas víctimas, ya quela mayoría de afecciones de los lesionadosrequieren un proceso de rehabilitación físicacon el fin de recuperar entre otras las variablesde movilidad y fuerza que son precisamentelas que se trabajan en el presente desarrollo.Esto involucra una parte de rehabilitación
216 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
pasiva y otra parte activa, en la cual se usanbicicletas estáticas.
En gran medida la impresión positivaes porque el desarrollo se convierte en unreto para el usuario y una ayuda a laconcentración en una actividad paralela deentretenimiento mientras realiza el proceso derehabilitación.
Si bien se recibieron comentarios negativosrespecto a la ergonomía en el caso dela bicicleta específica utilizada para eldesarrollo, es decir, con la cual se realizó laprueba, especialmente por los inconvenientesque traería utilizar dicha bicicleta en unapersona protetizada en cuanto a estabilidad,hubo claridad en los fisioterapeutas que dichasituación se soluciona fácilmente adaptandoel sistema a las bicicletas utilizadas enpacientes protetizados, de tipo Recumbent.Adicionalmente uno de los encuestadosexpresó sus intentos preliminares a nivelpersonal de implementar una idea parecidacuando, mientras realizaba entrenamientofísico con una bicicleta estática, practicaba unvideojuego identificando que lograba mayortiempo de entrenamiento. Una limitaciónque preliminarmente ha sido identificada enel sistema es que su uso prolongado, tal comosucede en el caso de algunos videojuegos,podría contribuir al desarrollo de patologíascomo Tenosinovitis de Quervain, por lo tantoes recomendable utilizarlo de acuerdo a lasrecomendaciones del fisioterapeuta.
Por último, dos fisioterapeutas hicieronénfasis en que el sistema solamente se puedeusar en ciertas etapas de la rehabilitación yteniendo en cuenta el nivel de amputación delpaciente.
CONCLUSIONES
Se desarrolló una prueba de concepto deun sistema de adquisición de datos quese integra con un videojuego existentemediante dispositivos de mando localizadosen una bicicleta estática a la cual se leintegraron sensores de velocidad y fuerza. Loanterior con el propósito de ser implementado
en procesos de rehabilitación de miembrosinferiores de víctimas de Minas Antipersonal(MAP), lo que finalmente hace que el sistemaobtenido sea considerado un Juego Seriopara rehabilitación, dado que su principalobjetivo se centra en favorecer procesos derehabilitación y habilidades en el usuariomediante una práctica orientada.
El sistema desarrollado cuenta con unabicicleta estática comercial, sensores sobrelos pedales para medir la fuerza de pedaleodel usuario, un sensor óptico para medir lavelocidad de la acción de pedaleo y pulsadoresde mando en los extremos del manillar de labicicleta para interactuar con el juego. Esadaptable a cualquier bicicleta estática y elpaciente puede interactuar a través de él condiferentes juegos, de hecho, se probó paratres juegos diferentes de automóviles. Conel sistema, el terapeuta tiene la posibilidadde establecer la velocidad mínima requeridapara la rehabilitación y analizar las fuerzasrealizadas durante el pedaleo.
Se realizaron pruebas de caracterizacióndel sensor de velocidad y los sensores defuerza y una evaluación de desempeño delsistema completo con un usuario. Eneste contexto se determinaron ventajasimportantes del sistema desde el punto devista técnico en términos de la aplicación deinterés.
El sistema fue considerado ergonómicoy seguro por parte de un grupo de 20fisioterapeutas que observaron su desempeño.El 70 % de los fisoterapeutas consideraronel sistema con un nivel Alto de ergonomía,el 80 % consideraron que los ejercicios quepueden realizarse en el sistema tienen unnivel Alto de concordancia con la terapiatradicional y el 90 % consideraron que elsistema tiene un nivel Alto de seguridad.Este resultado es alentador si se consideraque la categoría Alto involucraba valoracionesde Alto, Muy Alto y ExtremadamenteAlto, pero no valoraciones de Regular oinferiores. Adicionalmente la encuesta alos fisioterapeutas reportó que el sistema
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 217
permite realizar ejercicios de rehabilitación demiembro inferior de la terapia tradicional ytiene posibilidades de aplicación en múltiplesterapias del proceso de rehabilitación devíctimas de MAP.
Se ratifican los adelantos del estadodel arte en cuanto a las ventajas delos juegos serios y su potencial pararehabilitación, al igual que los beneficiosque ofrece una bicicleta estática en terapiasde rehabilitación, lo cual se convierte enuna oportunidad teniendo en cuenta la altaincidencia de víctimas de MAP en el mundoy especialmente en varios países en vía dedesarrollo.
Los resultados obtenidos se consideranútiles para una futura aplicación enrehabilitación de miembro inferior paravíctimas de MAP en terapia activa. Además,fueron adecuados a las necesidades de laaplicación y el error en la medición seencuentra en el rango permitido para estetipo de sistemas. De hecho, debido aque el desarrollo electrónico es propio, esposible mejorar las condiciones de exactitud yprecisión para tener potenciales aplicacionesen otras áreas con requerimientos másexigentes.
El sistema puede ser integrado avarios videojuegos disponibles, lo cualle da versatilidad, sin embargo, resultaconveniente desarrollar, como trabajo futuro,un videojuego propio, que permita una mayorinterconexión con el sistema de adquisiciónde datos, a través de la integración dela medición de la fuerza, como variablefisiológica con el control de la interfaz. Dehecho, se ha contemplado también comoun trabajo futuro el desarrollo de juegosserios adicionales que permitan al usuarioseleccionar la alternativa preferida dentro deuna gama de posibilidades de acuerdo a susgustos.
Por otra parte, teniendo en cuenta que elsistema de adquisición de datos no es invasivoy, por el contrario, presentó aceptaciónpor parte de los fisioterapeutas por incluir
un videojuego, se propone, en un futuro,realizar pruebas a un número determinadode pacientes víctimas de MAP con prótesisy de esta manera evaluar el funcionamientodel sistema de adquisición de datos duranteejercicios de rehabilitación activa, en los queel paciente moverá los pedales continuamentey realizará por su propia acción losejercicios isocinéticos establecidos por unfisioterapeuta. Adicionalmente, se plantea lahipótesis de que el sistema no es exclusivopara rehabilitación de personas víctimasde MAP, por lo tanto se plantea que enun trabajo futuro se podrá probar dichosistema, por ejemplo, con discapacitados poraccidentes de tránsito o deportistas de altorendimiento con lesiones deportivas.
De igual manera dentro del trabajo actualno se ha contemplado un análisis biomecánicorelacionado con el paciente protetizado y suinteracción con la bicicleta estática puestoque se parte del hecho que estas bicicletasya se utilizan para este tipo de terapias. Sinembargo, como trabajo futuro, es interesantetrabajar en dicho modelo, de tal manera quese tenga en cuenta la fuerza que aplica elpaciente durante el pedaleo y su postura.Lo anterior cobra mayor importancia sise analiza que al utilizar una prótesis lapostura del paciente cambia y es importantecuantificar el proceso y estudiar si a medidaque realiza la rehabilitación pueden aparecerdisfunciones adicionales.
Por último, con el fin de complementarlos ejercicios de rehabilitación que se puedenrealizar actualmente con el sistema deadquisición de datos, los cuales son solamenteejercicios de rehabilitación activa, comotrabajo futuro se plantea incorporar un motorque permita realizar terapias adicionales, detal manera que cuando el motor apliqueun torque sobre los pedales para movilizarlos miembros del sujeto, se podrían realizarterapias pasivas o asistidas. Finalmente,en el caso que el motor pueda aplicar untorque que se oponga al pedaleo del sujeto,se podrían realizan terapias resistidas, ya sea
218 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
manteniendo la fuerza constante o no.
AGRADECIMIENTOS
Los autores quieren expresar suagradecimiento a Camilo A. Páramo por sucolaboración en el diseño y construcción dela pieza mecánica para los sensores de fuerza,a Juan C. Vanegas y Juan P. Ugarte por suscomentarios que ayudaron a enriquecer esteartículo, a Lucelly López por su apoyo enel análisis estadístico y a la fisioterapeutaVanessa Montoya por su asesoría en lostemas de rehabilitación y apoyo con loscontactos de los fisioterapeutas que fueronencuestados. Adicionalmente los autoresexpresan agradecimiento al DepartamentoAdministrativo de Ciencia, Tecnologíae Innovación Colciencias por su apoyobajo el programa Jóvenes Investigadores eInnovadores y a la Universidad PontificiaBolivariana por su apoyo bajo la modalidadde beca-pasantía para estudio de Formaciónavanzada.
REFERENCIAS
1. Landmine Monitor 2014, “Landmineand Cluster Munition Monitor,” 2015.
2. Dirección Contra Minas, “DesminadoHumanitario Acuerdo # 52 - La Habana(Cuba) del 07 de marzo de 2015,” 2015.
3. Comité Internacional de la CruzRoja, “Guía para el Manejo Médico-Quirúrgico de Heridos en Situaciónde Conflicto Armado,” CICR Comitéinternacional de la cruz roja Ministeriode la Protección Social República deColombia, p. 137-151, 2011.
4. Comité Internacional de la Cruz Roja,“Asistir a las víctimas de las minasterrestres, p. 1-17, 2005.
5. Pain and Rehabilitation from LandmineInjury, “International Association for
the Study of Pain,” no. VI(2), p. 91-94,1998.
6. Mora, E., De Rosa, R., “Fisioterapiadel Aparato Locomotor,” Síntesis,(Universidad de Valencia, España),1999.
7. Brotzman, J. M., Wilk, K. E.,“Rehabilitación Ortopédica Clínica.,”Elsevier (España), 2005.
8. Covenant Health, Banff SportMedicine., “Rehabilitation Programfor Achilles Tendon Rupture / Repair,2012.
9. Ranky, R. G., Sivak, M. L., Lewis,J. A., Gade, V. K., Deutsch, J.E., “Modular mechatronic system forstationary bicycles interfaced withvirtual environment for rehabilitation,”Journal of neuroengineering andrehabilitation, no. 11(1), p. 1-16, 2014.
10. Djaouti, D., Alvarez, J., Jessel,J.P., “Classifying serious games:The G/P/S model,” Handbook ofResearch on Improving Learningand Motivation through EducationalGames: Multidisciplinary Approaches,p. 118?136, 2011.
11. Miller, L. M., Chang, C.-I., Wang, S.,Beier, M. E., Klisch, Y., “Learning andmotivational impacts of a multimediascience game,” Computers & Education,no. 57(1), p. 367?379, 2010.
12. Wattanasoontorn, V., Boada, I., García,R., Sbert, M., “Serious games forhealth.,” Entertainment Computing,no. 4(4), p. 231-247, 2013.
13. Chen, P. Y., Wei, S. H., Hsieh, W.L., Cheen, J. R., Chen, L. K., Kao,C. L., “Lower limb power rehabilitation(LLPR) using interactive video gamefor improvement of balance function inolder people,” Archives of Gerontology
Franco y col., Sistema de Rehabilitación de Miembro Inferior Interconectado con un Videojuego: Una Potencial Aplicaciónpara Víctimas de Minas Antipersonal 219
and Geriatrics, no. 55(3), p. 677-682,2012.
14. Velázquez García, L. A., Peña Estrada,C. C., “Uso de los videojuegos comoauxiliar didáctico en la educaciónsuperior,” Revista Iberoamericana ParaLa Investigación Y El DesarrolloEducativo., 2013.
15. Serrano, E. P., “Videojuegos para lasalud.,” Comunicación Y Salud., p. 1-21, 2010.
16. Smith, D. B., Miller, R. F., and Moore,J. M., “Pedal-Operated, StationaryExercise Device,” US Patent, 1986,4.592.544.
17. Brown, D. A., and Kautz, S. A.,“Increased Workload Force OutputDuring Pedaling Exercise in PersonsWith Poststroke Hemiplegia,” Stroke.,no. 153, pp. 598-607, 1998.
18. Sargeant, A. J., Hoinville, E., andYoung, A., “Maximum leg force
and power output during short-termdynamic exercise,” Journal of appliedphysiology., vol. 51, no. 5, pp. 1175-1182, 1981.
19. Harrell, F. E., Lee, K. L., Matchar, D.B., and Reichert, T. A., “Regressionmodels for prognostic prediction:advantages, problems, and suggestedsolutions,” Cancer Treat. Rep., vol. 69,no. 10, p. 1071-1077, Oct. 1985.
20. Peduzzi, P., Concato, J., Kemper,E., Holford, T. R., and Feinstein,A. R., “A Simulation Study of theNumber of Events per Variable inLogistic Regression Analysis.,” J ClinEpidemiol, vol. 4912, no. 49, pp. 1373-1379, 1996.
21. Amaral, J. F., Mancini M., NovoJúnior J. M. , “Comparison of threehand dynamometers in relation tothe accuracy and precision of themeasurements.,” Revista Brasileira deFisioterapia., p. 216-224, 2012.
ib