Sistema de control híbrido para microbots
23
UNIVERSIDAD DE MÁLAGA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN PROYECTO FIN DE CARRERA: SISTEMA DE CONTROL HÍBRIDO PARA MICROBOTS INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN SISTEMAS ELECTRÓNICOS DEPARTAMENTO DE TECNOLOGÍA ELECTRÓNICA Realizado por: Dirigido por: Gustavo Adolfo Gómez López Cristina Urdiales García
-
Upload
cristina-urdiales -
Category
Engineering
-
view
27 -
download
0
Transcript of Sistema de control híbrido para microbots

UNIVERSIDAD DE MÁLAGAESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN
PROYECTO FIN DE CARRERA:
SISTEMA DE CONTROL HÍBRIDO PARA MICROBOTS
INGENIERÍA TÉCNICA DE TELECOMUNICACIÓNSISTEMAS ELECTRÓNICOS
DEPARTAMENTO DE TECNOLOGÍA ELECTRÓNICA
Realizado por: Dirigido por: Gustavo Adolfo Gómez López Cristina Urdiales García

ÍNDICE
INTRODUCCIÓN
PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
OBJETIVOS Y PROPUESTAS
NIVEL DELIBERATIVO
NIVEL HÍBRIDO DE NAVEGACIÓN
EJEMPLOS
CONCLUSIONES Y LINEAS FUTURAS

INTRODUCCIÓN
ROBÓTICA
Manipulador multiprogramable y multifuncional
Agentes autónomos inteligentes
Complejidad SW y HW
Tecnología cara y sofisticada
Interacción con el entorno
Reducción complejidad HW disminuye SW Microbots
Ejemplos robots

INTRODUCCIÓN
MICROBÓTICA
Subrama de la robótica
Sencillez de operaciones
Bajo coste, flexibles, etc
Agentes de reducido tamaño
Ejemplos microbots
Quark Tritt Hexápodo.

ÍNDICE
INTRODUCCIÓN
PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
OBJETIVOS Y PROPUESTAS
NIVEL DELIBERATIVO
NIVEL HÍBRIDO DE NAVEGACIÓN
EJEMPLOS
CONCLUSIONES Y LINEAS FUTURAS

PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
Estrategias de control deliberado para operar robot
MicrobotsPequeño tamaño
Bajo coste
Escasa capacidad
computacional
Tareas simples
Arquitecturas reactivas asocian entrada/acción
Estrategias de control híbrido. Combinación de ambas técnicas

ÍNDICE
INTRODUCCIÓN
PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
OBJETIVOS Y PROPUESTAS
NIVEL DELIBERATIVO
NIVEL HÍBRIDO DE NAVEGACIÓN
EJEMPLOS
CONCLUSIONES Y LINEAS FUTURAS

OBJETIVOS Y PROPUESTAS
OBJETIVO Dotar de comportamiento autónomo al microbot dentro de un entorno dinámico empleando para ello una arquitectura de control híbrida para navegación.
PROBLEMAS
Respuesta rápida capa reactiva
Limitación HW imposible implementar capa deliberada en el Microbot
SOLUCIÓN
Distribuir la arquitectura
A nivel HW, conectamos el microbot a un PC mediante un enlace radio para distribuir la arquitectura. Implementamos la capa deliberada en el PC y la reactiva en el microbot

OBJETIVOS Y PROPUESTAS
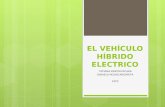
ESQUEMA GENERAL
TARJETA CAPTURADORA
PUERTO PARALELO
PC
Receptor Video
ENLACE RADIO
• Receptor-Emisor AUREL con Modulación AM On/Off de datos digitales• Transmisión bidireccional en la banda de 433 MHz• Envío-Recepción de datos de 4 bits a 28 bits/s aprox.• Alcance: 10-15 m en espacios abiertos
MICROBOT
• CT6811 - Microcontrolador 68HC11 de Motorola - Frecuencia de bus: 2 MHz - 256 bytes de RAM - 512 bytes de EEPROM - 5 puertos de 8 bits
• CT293+ - Motores - Sensores
Mini cámara

ÍNDICE
INTRODUCCIÓN
PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
OBJETIVOS Y PROPUESTAS
NIVEL DELIBERATIVO
NIVEL HÍBRIDO DE NAVEGACIÓN
EJEMPLOS
CONCLUSIONES Y LINEAS FUTURAS

NIVEL DELIBERATIVO
DEFINICIÓN
Objetivo: proporcionar al microbot el camino a seguir libre de obstáculos para alcanzar un determinado punto dentro del entorno de navegación
Necesidad de un modelo del entorno Interfaz de usuario que proporcione un modelo sobre el que trazar manualmente el camino a seguir
Interfaz abierta para futuras aplicaciones
Implementación de una aplicación en C para ser ejecutada en un PC bajo Linux encargada de implementar el control deliberado

NIVEL DELIBERATIVO
ESQUEMA GENERAL

NIVEL DELIBERATIVO
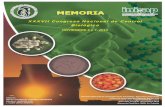
IMPLEMENTACIÓN
Microbot
Obstáculos
Camino trazado
Destino
Interfaz de usuario de la aplicación de control Recorrido a nivel lógico
1º Giro derecha 1
2º Avanzar d1
1º
2º
1
d1
3º4º2
d2
5º
6º
3
d3
3º Giro izquierda 2
4º Avanzar d2
5º Giro derecha 3
6º Avanzar d3
Codificación
Comando Mov. – nº pasos
Comando Movimiento
Avanzar 0x01Atrás 0x07 Izquierda 0x03Derecha 0x05Parar 0x02
Número de pasos 0x00 – 0x0E0x0F fin de trama

NIVEL DELIBERATIVO
DIAGRAMA DE BLOQUES DE LA APLICACIÓN EJECUTADA EN EL MICROBOT
Pila
Recepción Datos
MóduloControl
Contadorpasos
Fin recepción
EncoderMotores

NIVEL DELIBERATIVO
EJEMPLOS Y RESULTADOS
Ejemplo 1
Ejemplo 2

ÍNDICE
INTRODUCCIÓN
PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
OBJETIVOS Y PROPUESTAS
NIVEL DELIBERATIVO
NIVEL HÍBRIDO DE NAVEGACIÓN
EJEMPLOS
CONCLUSIONES Y LINEAS FUTURAS

NIVEL HÍBRIDO DE NAVEGACIÓN
DEFINICIÓN Objetivo: dotar al microbot de un comportamiento reactivo que le permita sortear obstáculos imprevistos
Evitar obstáculos
Restablecer dirección
Alcanzar destino
percepción acción
entorno
Algoritmos simples que pueden ser implementados en el microbot
Asociación directa entre respuesta sensorial y acción

NIVEL HÍBRIDO DE NAVEGACIÓN
IMPLEMENTACIÓN Algoritmo sencillo que haga retroceder, girar y avanzar al microbot hasta rebasar el obstáculo
Ejemplo:

ÍNDICE
INTRODUCCIÓN
PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
OBJETIVOS Y PROPUESTAS
NIVEL DELIBERATIVO
NIVEL HÍBRIDO DE NAVEGACIÓN
EJEMPLOS
CONCLUSIONES Y LINEAS FUTURAS

EJEMPLOS DE NAVEGACIÓN HÍBRIDA
Recorrido corto
Recorrido largo
Mini Cámara

ÍNDICE
INTRODUCCIÓN
PROBLEMÁTICA Y JUSTIFICACIÓN DEL PROYECTO
OBJETIVOS Y PROPUESTAS
NIVEL DELIBERATIVO
NIVEL HÍBRIDO DE NAVEGACIÓN
EJEMPLOS
CONCLUSIONES Y LINEAS FUTURAS

CONCLUSIONES Y TRABAJO FUTURO
CONCLUSIONES Operación autónoma inteligente de agentes de escasos recursos (microbots) gracias al empleo de técnicas híbridas
Pérdida de localización del móvil en recorridos largos
Imposible seguir el camino marcado con exactitud
TRABAJO FUTURO
Inclusión de algoritmos para la construcción de modelos y planificación de recorridos Controlar la navegación del microbot con una arquitectura de control deliberada basada en visión Sistema de localización basado en realimentación sensorial para operar con recorridos más largos Utilizar enlace radio bidireccional

UNIVERSIDAD DE MÁLAGAESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN
PROYECTO FIN DE CARRERA:
SISTEMA DE CONTROL HÍBRIDO PARA MICROBOTS
INGENIERÍA TÉCNICA DE TELECOMUNICACIÓNSISTEMAS ELECTRÓNICOS
DEPARTAMENTO DE TECNOLOGÍA ELECTRÓNICA
Realizado por: Dirigido por: Gustavo Adolfo Gómez López Cristina Urdiales García