Simulación del control de temperatura en la etapa...
66
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD PROFESIONAL ADOLFO LÓPEZ MATEOS DEPARTAMENTO DE INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN Simulación del control de temperatura en la etapa de extrusión del reciclado de discos compactos Presentan Hernández Rodríguez Isaac Israel Romero Domínguez Eunice Pilar Asesores M. en C. Nelly Mariana Baena López M. en C. René Tolentino Eslava México, D. F. Julio 2012 Tesis Que para obtener el título de Ingeniero en Control y Automatización
Transcript of Simulación del control de temperatura en la etapa...

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL ADOLFO LÓPEZ MATEOS
DEPARTAMENTO DE INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
Simulación del control de temperatura
en la etapa de extrusión del reciclado
de discos compactos
Presentan
Hernández Rodríguez Isaac Israel
Romero Domínguez Eunice Pilar
Asesores
M. en C. Nelly Mariana Baena López
M. en C. René Tolentino Eslava
México, D. F. Julio 2012
Tesis
Que para obtener el título de Ingeniero en Control y Automatización

Contenido
Índice de figuras
No. Descripción Pág.
1.1 Partes principales del extrusor 12
1.2 Diagrama de un controlador PID 14
1.3 Sobrepaso máximo de 25% de la entrada escalón al sistema 16
1.4 Respuesta de escalón unitario 17
1.5 Respuesta ante la entrada escalón de la ecuación ���� =�
���� 19
1.6 Respuesta escalón de un proceso de primer orden más tiempo
muerto 21
1.7 Parámetros del modelo que se obtiene mediante el primer método 22
1.8 Parámetros del modelo que se obtiene mediante el segundo método 22
1.9 Parámetros del modelo con tres parámetros que se obtienen
mediante el tercer método 23
2.1 Proceso de reciclado de los discos compactos 25
2.2 Identificación de las etapas del extrusor 26
2.3 Respuesta de la temperatura en la zona 1 27
2.4 Respuesta de la temperatura en la zona 2 28
2.5 Respuesta de la temperatura en la zona 3 29
2.6 Respuesta de la temperatura en la zona 4 30
2.7 Lazo de control abierto 33
2.8 Lazos de control abiertos de las 4 zonas de calentamiento 33
2.9 Respuesta de las 4 zonas de calentamiento en lazo abierto 34
2.10 Respuesta de las 4 zonas de calentamiento en lazo abierto con
perturbaciones 35
2.11 Lazo de control de las 4 zonas de calentamiento 36
Pág.
Resumen i
Introducción ii

2.12 Respuesta de lazo cerrado en las 4 zonas de calentamiento 36
2.13 Lazo de control con controlador PID 37
2.14 Código de programación del sistema con el controlador PID 39
2.15 Respuesta del sistema con el controlador PID 40
2.16 Lazo de control implementando el controlador PID 1 con
perturbaciones 41
2.17 Respuesta de controlador PID con perturbaciones 42
2.18 Respuesta del controlador PID con las ganancias mejoradas y
perturbaciones al sistema 43
3.1 Perturbación zona 1 de 20 °C 45
3.2 Perturbación zona 4 de 239 °C 46
3.3 Perturbación zona 4 de 261 °C 47
Índice de tablas
No. Descripción Pág.
1.1 Clasificación de la basura a nivel mundial 2
1.2 Características del policarbonato 5
1.3 Calculo de las ganancias de Ziegler-Nichols 18
1.4 Valores de parámetros propuestos por Ziegler-Nichols para el método
de respuesta a un escalón 20
2.1 Variación de la temperatura en la zona 1 27
2.2 Variación de la temperatura en la zona 2 28
2.3 Variación de la temperatura en la zona 3 29
2.4 Variación de la temperatura en la zona 4 30
2.5 Funciones de transferencia de las zonas de calentamiento 32
2.6 Ganancias en las 4 zonas de calentamiento 39
2.7 Asignación de las ganancias mejoradas al controlador PID 43
3.1 Trabajo de ingeniería 49

Pág.
Capítulo 1 Reciclado de discos compactos y control PID 1
1.1. Panorama actual del reciclado 1
1.1.1. Ámbito Internacional 1
1.1.1.1. Plásticos 3
1.1.1.2. Ventajas 3
1.1.1.3. Desventajas 4
1.1.2. Ámbito Nacional 4
1.1.2.1. Policarbonato 4
1.2. Empresas Nacionales e Internacionales dedicadas al
reciclado de CD’s 6
1.3. Tipos de procesos de reciclado de los discos
compactos 7
1.4. Proceso del reciclado mecánico 8
1.4.1. Preparación y molienda 8
1.4.2. Etapas de lavado y secado 9
1.4.3. Etapas de extrusión y ganseado o peletizado 9
1.5. Componentes de una máquina extrusora 10
1.5.1. Proceso de extrusión en el reciclado de discos
compactos 11
1.6. Control PID 13
1.6.1. Ventajas 15
1.6.2. Usos en la industria 15
1.6.3. Reglas de sintonización de un controlador PID 16
1.6.4. Método de identificación por datos estadísticos
de Ziegler-Nichols 19
Capítulo 2 Simulación del control de temperatura 25
2.1. Modelo matemático del extrusor 25
2.2. Lazo de control del sistema 32
2.3. Sintonización del controlador PID 37
2.4. Simulación del sistema 39
Capítulo 3 Análisis de resultados 45
3.1. Control de temperatura con una perturbación de 20
°C en la zona 1 de calentamiento 45
3.2. Control de temperatura con una perturbación de 239
°C en la zona 4 de calentamiento 46
3.3. Control de temperatura con una perturbación de 261
°C en la zona 4 de calentamiento 47
3.4. Cálculo económico 49
3.4.1. Trabajo de Ingeniería y mano de obra 49
Conclusiones 50
Bibliografía 52
i
Resumen
En este trabajo se realizó una simulación del control de temperatura en la etapa de
extrusión del proceso de reciclado de discos compactos.
Para cumplir el objetivo general del presente trabajo se desarrollo en varias
etapas. En el capítulo 1 se hace mención del panorama actual del reciclado a nivel
mundial y nacional así como las empresas que se dedican a reciclar electrónicos.
Se menciona también, los diferentes tipos de procesos para reciclar discos
compactos, así como las etapas con las que cuenta dicho proceso. Otro punto
importante presentado en este capítulo, es el método de control que se utilizara
para controlar la temperatura en la etapa de extrusión.
En el capítulo 2, como primer paso se planteo el problema a resolver, y de esta
manera se procedió a realizar el modelo matemático del extrusor. Posteriormente
se obtuvieron las funciones de transferencia y lazos de control correspondientes a
cada una de las zonas de calentamiento. Se calcularon las ganancias requeridas
por los controladores que se simularon dentro del programa. Una vez obtenidas
tanto las funciones de transferencia como las ganancias para los controladores, se
procedió a realizar la simulación del control de temperatura para la etapa de
extrusión con diferentes perturbaciones.
Para finalizar en el capítulo 3, se analizaron los resultados de la simulación que se
realizó con las diferentes perturbaciones que se propusieron, se observo en las
graficas obtenidas que el controlador propuesto, realiza su función de controlar y
estabilizar al sistema cuando existan aumentos o disminuciones de temperatura
dentro de las zonas de calentamiento.
Por lo tanto el haber realizado simulaciones del control de temperatura en la etapa
de extrusión dió como resultado que el seleccionar un controlador PID para
controlar la temperatura es viable y cumple con las condiciones necesarias para
que pueda ser implementando si así se requiere.

ii
Introducción
Un tema que ha acaparado la atención mundial es la gran contaminación que se
esta generando, producto de diversos factores entre los que se encuentran la
generación de desechos solidos (basura), los cuales por su mal manejo en el
reciclado esta repercutiendo en el ecosistema del planeta.
La generación de basura a nivel mundial ha ido en aumento desmesurado, ya que
la industria ha adoptado la cultura de la envoltura en sus productos así como de
productos desechables, que al ser arrojados al medio ambiente produce un daño
ecológico irreversible, del cual hay que tomar en cuenta para apoyar a su solución.
Tan solo en nuestro país en el año 2010 se arrojaron las siguientes cifras:
generación de basura solida 38 325000 ton de las cuales 24 731200 ton., fueron
de basura orgánica y 13 593800 ton., de basura inorgánica es la constituida de
desechos del orden vegetal y animal, la cual no es tan contaminante al medio
ambiente ya que al ser incorporada al mismo tiene un proceso de descomposición
rápida, lo cual hace que su reciclaje sea casi inmediato a la naturaleza, a
diferencia de la basura inorgánica la cual esta constituida en su mayoría por
desechos solidos del orden, plástico, vidrio, metales, papel y textiles, entre otros
tipos de desechos de productos desechables como pañales, residuos de
hospitales etc. De la basura inorgánica generada en nuestro país, 4 173600 ton.,
son plásticos siendo los más comunes el Teraftalato de Polietileno (PET),
Policloruro de Vinilo (PVC), Polipropileno (PP), Poliestireno (PS), Policarbonato
(PC), los cuales crean un gran impacto en la contaminación del medio ambiente.
Dentro de este grupo de desechos solidos plásticos, nos centraremos en los
Policarbonatos (PC) los cuales representan el 18.9% del total del grupo de
plásticos desechados en nuestro país, este tipo de desecho plástico se encuentra
principalmente en la elaboración de discos compactos. Estos se volvieron un
problema de contaminación a partir de la década de los 90, cuando la demanda de
documentación digital fue en aumento, como lo es música, video-libros u otro
formato digital que se contiene en los discos compactos, los cuales al perder
importancia o ser obsoletos son desechados.

iii
Actualmente los discos que son desechados llegan hasta los vertederos de basura
o a incineradores para ser utilizados como combustible, lo que produce un daño
alto de contaminación al medio ambiente. Aunque el plástico en si, no se
considera dañino al medio ambiente, los elementos que lo componen aluminio,
laca y pinturas que conforman la serigrafía, si lo son.
Poniendo atención al daño ecológico que están causando los desechos sólidos al
medio ambiente, están surgiendo empresas que se dedican al reciclamiento de
dichos desechos, transformándolos en materia prima, nuevamente utilizada en la
industria. Un ejemplo de estas empresas que se dedican al reciclaje de
Policarbonato (PC) el cual puede ser encontrado en los discos compactos son,
CEDERIKA, empresa española y REMSA empresa Mexicana; empresas que han
tomado conciencia de este problema y han implementado un proceso de reciclaje.
Dicho proceso de reciclado de los discos compactos que inicia con la recepción de
los discos compactos, preparación de los discos compactos y las siguientes
etapas: De molienda, lavado, secado, extrusión, peletizado y salida del
policarbonato reciclado; en la etapa de extrusión, que es el calentamiento del
plástico ya limpio y triturado para moldearlo y darle forma de cilindro fino y
alargado; normalmente la temperatura debe permanecer en 250°C con una
variación de ±10°C, para que el plástico reciclado pueda ser utilizado para la
elaboración de otros productos que lo utilicen como materia prima.
Dentro de la etapa de extrusión es importante considerar la temperatura ya que si
esta aumenta drásticamente el plástico se quema de tal forma que pierde las
propiedades que se requieren para su reutilización; o caso contrario, si la
temperatura desciende este no va a fundirse de forma correcta produciendo
grumos dentro del extrusor, los cuales bloquean la salida del plástico, dañando la
máquina y provocando pérdidas económicas, debido a que esta etapa es la más
importante dentro del proceso de reciclado.
Debido a lo anterior es de suma importancia tener un control adecuado con la
temperatura, por lo consiguiente se realizara una simulación del control de
temperatura de una máquina extrusora, empleando un controlador PID

iv
(Proporcional Integral y derivativo) para mantener la temperatura dentro del
extrusor en el intervalo de operación optimo de 250°C ±10°C. Esperando que en el
momento exista un cambio en la temperatura de la máquina el controlador realice
su objetivo de controlar y mantener la temperatura dentro de los parámetros de
operación y de fundición del policarbonato.
Por ello el propósito del presente trabajo es “simular el control de temperatura en
la etapa de extrusión dentro del proceso de reciclado de los discos compactos”.
Dentro del proceso de reciclaje del policarbonato es importante obtener un control
óptimo de la temperatura dentro del extrusor, para que el producto final
(policarbonato) cuente con las propiedades necesarias para su uso con la
elaboración de distintos productos como garrafones de agua, vidrios blindados,
piezas para interiores de automóviles etc. Por lo tanto se realizara un control de la
temperatura para mantener a la misma dentro de estándares de operación con el
cual obtendremos ventajas bastante favorables dentro de estándares de operación
con el cual obtendremos ventajas bastante favorables dentro del proceso de
reciclaje, en la etapa de extrusión tema de estudio.

CAPÍTULO 1.
RECICLADO DE DISCOS
COMPACTOS Y CONTROL
PID

1
1.1. Panorama actual del reciclado
1.1.1. Ámbito Internacional
Hoy en día el planeta tiene que lidiar con los problemas climáticos y desechos
orgánicos e inorgánicos producidos por el ser humano, la preocupación por estos
problemas ha generado la necesidad de estudiar e implementar acciones que
ayuden a nuestro medio ambiente, por ello se llevan a cabo tareas para reducir
los gases efecto invernadero y controlar las toneladas de basura que son
desechadas día con día, una de la iniciativas que se han propuesto a nivel mundial
es el reciclado de estos desechos. La gran cantidad de basura desechada afecta a
todo el mundo, se han hecho estudios y estimaciones a nivel mundial que cada
persona en el planeta produce diariamente entre 0.8 kg a 2 kg de basura
aproximadamente. [5]
Como se muestra en la tabla 1.1., la basura que comúnmente se desecha se tarda
mucho tiempo en degradarse, anteriormente se pensaba que no se podía reciclar
o solamente no se utilizaba, algunos gobiernos de todos los países con ayuda de
la sociedad buscaron y aplicaron soluciones al problema de la contaminación. Una
de ellas fue controlar el aumento de los desechos, utilizando la regla de las tres
erres: reducir, reutilizar y reciclar.
Reducir significa disminuir al máximo la cantidad de contaminantes, un ejemplo se
aplica en los campos de agricultura en varios países donde está prohibido el
plaguicida DDT, ya que tiene un alto índice de contaminación que afecta tanto al
suelo, al agua, al fruto, ya que cuando sea consumido lo antes mencionado puede
causar enfermedades como vomito, temblor, convulsiones, cáncer, etc.
Reutilizar tiene la finalidad de volver usar los objetos que están en un buen estado
después de su uso inicial, una de las ventajas que tiene este tipo de reciclaje es su
costo bajo, ya que se le puede dar diferentes usos dependiendo del empleo que
se le encuentre al objeto desechado, como ejemplo se tienen las carcasas de los
monitores de las computadores, que se utilizan como macetas en oficinas, etc.

2
Tabla 1.1. Clasificación de la basura a nivel mundial.�14�
Material Utilización Producto biodegradable
Madera y tela Cajas para empacar alimentos,
muebles, cajas para empacar
productos terminados.
Es completamente
biodegradable, se pueden
reutilizar varias veces.
Envolturas y
bolsas de
papel
Utilizadas en la mayoría de
tiendas y almacenes
Son completamente
biodegradables a largo
plazo.
Botellas,
bolsas y
películas de
Polietileno
Usados en el empaque de
sólidos y líquidos.
No se degradan y
permanecen inertes en la
basura por mucho tiempo
(entre cien a mil años).
Cloruro de
Polivinilo (PVC)
Se emplea con frecuencia para
el envasado de conservas y
bebidas, así como de productos
de tocador como shampoo y
acondicionadores
Si son reciclables pueden
utilizarse varias ocasiones.
Poliestireno Muy utilizado como empaque de
aparatos y equipo frágil
(televisores, computadoras,
radios etc.), así como de frutas y
legumbres.
Se puede reutilizar en los
sistemas de aislamiento
térmico ya cuenta con
técnicas adecuadas para
reciclarlo.
Papel celofán y
celulosa
Se utilizan en envolturas de
regalos y golosinas.
Es reciclado.
.
3
El reciclaje, definido como el volver a procesar el desecho y reincorporarlo a
productos nuevos un ejemplo de este procedimiento es el de los envases de vidrio
y plástico ya que estos se pueden reciclar para producir platos, vasos, cubiertos,
ventanas, artesanías, etc. La gran desventaja del reciclado es que su proceso de
separación para un correcto reciclado es caro [15].
Actualmente el plástico es uno de los productos más usados y por tanto el más
desechado, esto se debe a que ha sustituido a materiales como metales, vidrio, la
cerámica, etc. El problema con el plástico comienza por su inapropiado uso, ya
que es un material de larga duración y resistente, sin embargo las personas lo
utilizan por un tiempo corto y después lo desechan.
1.1.1.1. Plásticos
Los plásticos son un gran grupo de materiales orgánicos que contienen como
elemento principal el carbono, combinado con otros ingredientes como el
hidrogeno, oxígeno y nitrógeno. Es sólido en su estado final, en ciertas etapas del
plástico cuando se está procesado es suficientemente suave para ser moldeado
por muchos sistemas empleando calor y/o presión. [6]
1.1.1.2. Ventajas
Las ventajas del plástico son: es ligero, elástico, soporta esfuerzos mecánicos,
cuando son sometidos a fricción no se calientan mucho aunque no estén
lubricados (esta propiedad puede utilizarse en baleros y engranes), aislamiento
térmico (la conductividad térmica en los plásticos no es buena lo cual se puede
utilizar en envases para transportar líquidos calientes), tienen resistencia a la
corrosión (son muy buenos para soportar a los ácidos débiles y soluciones
acuosas saladas), son fáciles de fabricar, absorben la vibración y el sonido, son
reciclables, no necesitan lubricación y en costos son económicos esto depende del
volumen que se desea adquirir [7].

4
1.1.1.3. Desventajas
Entre las desventajas del plástico se tienen: es flamable y los gases que se
desprenden pueden llegar a ser tóxicos, tienen baja resistencia a los rayos UV por
ejemplo algunos plásticos tienden a perder su color y llegan a deformar su forma
original, en ciertos casos tienden a expandirse de tres a diez veces que los
metales con el calor, esto es un gran problema ya que se complica en el diseño de
las piezas, están propensos a volverse quebradizos a bajas temperaturas, la
mayoría no son biodegradables [7, 12].
1.1.2. Ámbito Nacional
México es un país que cuenta con 110 millones de habitantes, tan solo en el
Distrito Federal son desechadas diariamente más de 20 mil toneladas de basura y
anualmente se desechan aproximadamente 7 millones 300 mil toneladas de
basura. [3] En México la problemática es que las personas no tienen una cultura
ambiental, ya que no se preocupan por tener espacios libres de basura, y no se
recicla parte de la basura que se puede volver a reutilizar en otros productos. Otro
problema es que no son suficientes los lugares que sirven de vertederos en la
ciudad provocando así la existencia de depósitos ilegales donde se acumula la
basura al aire libre contaminado el aire, el suelo y el agua �9�.
1.1.2.1. Policarbonato
El aumento en la producción del disco compacto se debe en gran parte a la
piratería de música, películas y videos que se venden ilegalmente en las calles.
Los compactos están compuestos por policarbonato, laca, aluminio. El
policarbonato es polímero termoplástico fácil de trabajar, moldear y son utilizados
ampliamente en la manufactura moderna. Algunas características del
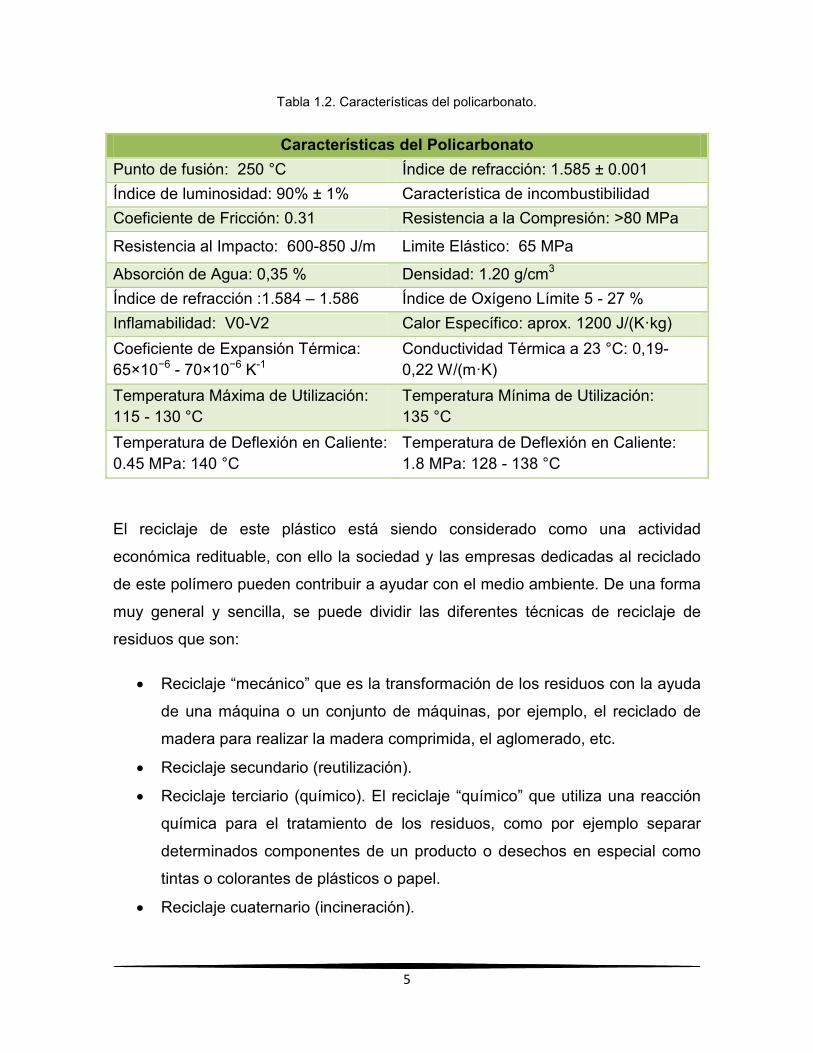
policarbonato se encontraran en la tabla 1.2. [11]
5
Tabla 1.2. Características del policarbonato.
Características del Policarbonato
Punto de fusión: 250 °C Índice de refracción: 1.585 ± 0.001
Índice de luminosidad: 90% ± 1% Característica de incombustibilidad
Coeficiente de Fricción: 0.31 Resistencia a la Compresión: >80 MPa
Resistencia al Impacto: 600-850 J/m Limite Elástico: 65 MPa
Absorción de Agua: 0,35 % Densidad: 1.20 g/cm3
Índice de refracción :1.584 – 1.586 Índice de Oxígeno Límite 5 - 27 %
Inflamabilidad: V0-V2 Calor Específico: aprox. 1200 J/(K�kg)
Coeficiente de Expansión Térmica: 65×10−6 - 70×10−6 K-1
Conductividad Térmica a 23 °C: 0,19-0,22 W/(m�K)
Temperatura Máxima de Utilización: 115 - 130 °C
Temperatura Mínima de Utilización: 135 °C
Temperatura de Deflexión en Caliente: 0.45 MPa: 140 °C
Temperatura de Deflexión en Caliente: 1.8 MPa: 128 - 138 °C
El reciclaje de este plástico está siendo considerado como una actividad
económica redituable, con ello la sociedad y las empresas dedicadas al reciclado
de este polímero pueden contribuir a ayudar con el medio ambiente. De una forma
muy general y sencilla, se puede dividir las diferentes técnicas de reciclaje de
residuos que son:
• Reciclaje “mecánico” que es la transformación de los residuos con la ayuda
de una máquina o un conjunto de máquinas, por ejemplo, el reciclado de
madera para realizar la madera comprimida, el aglomerado, etc.
• Reciclaje secundario (reutilización).
• Reciclaje terciario (químico). El reciclaje “químico” que utiliza una reacción
química para el tratamiento de los residuos, como por ejemplo separar
determinados componentes de un producto o desechos en especial como
tintas o colorantes de plásticos o papel.
• Reciclaje cuaternario (incineración).

6
1.2 . Empresas Internacionales y Nacionales dedicadas al reciclado de CD’s
En España se realizan actividades de recolección y reciclado de discos compactos
y de basura electrónica (computadoras, celulares, cartuchos de impresoras, etc.),
estas acciones están a cargo de la empresa llamada CEDERIKA. Esta empresa
invita a la sociedad a trabajar con ellos, en donde los hace distribuidores y
recolectores de basura electrónica por medio de recipientes donde se puede hacer
el acopio de la basura.
También cuentan con centros exteriores de acopio para que a la sociedad sea
participe de la recolección de sus desechos y que sientan que están contribuyendo
al cuidado del medio ambiente. Esto hace que la gente tenga conciencia de hacer
y cuidar el medio ambiente así como de desechar esos productos electrónicos
cotidianos que ya son obsoletos �7�.
Por otro parte REMSA una empresa 100% Mexicana dedicada al reciclaje de
residuos electrónicos, que tiene como objetivos, captar, recolectar, separar y
reciclar la mayor parte de los componentes de la basura electrónica, tales como el
vidrio de los monitores, discos compactos, las tarjetas madre de computadoras,
así como los metales que contienen y plásticos para su reciclado. Esta empresa
tiene presencia en casi toda la Republica Mexicana realizando acopios y llevando
de la mano a la sociedad a adquirir la cultura de reciclar nuestros productos
electrónicos que ya nos son obsoletos.
REMSA tiene programas como el Reciclon y Punto Verde que ofrecen una
solución segura y sustentable a nuestro país, en donde la sociedad en general,
puede depositar los electrónicos que ya no utilicen para que la empresa los recicle
y les dé otro uso y evitar contaminar el ambiente �8�.
FIDA es una fundación Española que se encarga de reciclar todo tipo de plástico
como discos compactos, así como derivados del policarbonato, fundada en 1992
por la comunidad de Madrid, tiene la participación de proyectos de empresas
publicas relacionadas con el medio ambiente, no lucra con lo que hace [19].

7
NOVAMEX Comercializadora Mexicana es una empresa que compra y vende todo
tipo de plástico como: PET, Polipropileno, Polietileno de baja, alta y de sopló,
policarbonatos, etc., esta empresa se dedica tanto a comprar el plástico virgen y
reciclado. Para reciclar, posteriormente se procesa el plástico y se elabora la
fabricación de un nuevo producto [17].
FEMSA Coca Cola es una compañía a nivel mundial, esta compañía tiene el
cuarto lugar en producir botellas de plásticos a nivel mundial, abrió una fábrica de
reciclaje de botellas de plástico, que es considerada la más grande del mundo en
Spartanburg, Estados Unidos. Esta planta tiene una máquina que transforma las
botellas de plástico usadas en nuevas, y produce unas dos mil millones de botellas
al mes lo cual alcanza su meta de que la empresa recicla al cien por ciento. [18]
1.3. Tipos de procesos para el reciclado de los discos compactos
Para realizar los reciclados del policarbonato (discos compactos) existen 2 formas
las cuales tienen como fin el reutilizar el policarbonato empleado en los discos
compactos. Existen dos métodos que lo llevan a cabo:
• Reciclado químico.
• Reciclado mecánico. [8]
El reciclado químico consta de un proceso de molienda donde se tritura en
pequeñas partes el policarbonato, posteriormente se lleva a un contenedor en
donde ahí se dará comienzo a las reacciones químicas que por medio de
diferentes compuestos químicos se separara el policarbonato de los materiales
sobrantes que contienen los discos compactos tales como aluminio, lacas y tintas
de impresión. Con este proceso se logra obtener un 90% de policarbonato
reutilizable para poder ser utilizado en otros productos ya sea en el sector
electrónico u otro donde se requiera policarbonato. El proceso mecánico es el que
se considero en este trabajo debido a que se controlara la temperatura en la etapa
de extrusión de este proceso, a continuación se describe el proceso.

8
1.4. Proceso del reciclado mecánico
El proceso de reciclado mecánico del Policarbonato consta de 6 etapas las cuales
son:
1. Preparación.
2. Proceso de molienda.
3. Proceso de lavado.
4. Proceso de secado.
5. Proceso de extrusión.
6. Proceso de ganseado o peletizado.
Cada una de estas etapas se describe a continuación.
1.4.1. Preparación y molienda
Previamente al molido de los discos compactos, se realiza una selección de los
residuos plásticos a reciclar para obtener una materia prima adecuada
(Policarbonato de los discos compactos) sin suciedad, con ello se realiza una
separación de objetos como vidrios, cartón y metales que pueden dañar tanto a
las máquinas que realizan el proceso como al producto final (ganza o pellet).
El proceso de molienda, reduce el tamaño de los residuos plásticos hasta obtener
el tamaño deseado. Existen diversos tipos de tamaños al cual se puede llegar, en
general puede llegarse a obtener trozos con una medida de media a un cuarto de
pulgada o finalmente polvo, según el tipo de molino del que se disponga.
La molienda comienza con la entrada de la materia prima en el molino triturador, el
cual tritura el material mediante el sistema de cuchillas impulsado por un motor
eléctrico, una vez triturado el material, el molino abre la tolva (depósito) y se extrae
el plástico molido que se dirige al siguiente paso.
9
1.4.2. Etapas de lavado y secado
El proceso de lavado consiste en la eliminación de impurezas pegadas al material
como tierra, papel, pegamento, pintura, metales y otros contaminantes para
obtener un producto final de calidad. El lavado de los trozos de discos compactos
se emplea una lavadora que se encuentra colocada normalmente tras el molino,
de modo que la salida del molino está conectada con la entrada de la lavadora, y
así los plásticos ya molidos pasan directamente a la lavadora. El lavado se realiza
con agua a presión y con una rotación continua de los discos compactos
triturados. Conjuntamente se realizan decantaciones sucesivas para que la
suciedad de los trozos quede en la parte de inferior de la lavadora.
El proceso de secado es la última etapa previa a la obtención del producto final
(Policarbonato reciclado). Este proceso consiste en eliminar la humedad del
material obtenida en la etapa de lavado para que pueda ser procesado
posteriormente.
El secado se hace mediante secadoras de tipo centrífugas, estas secadoras están
diseñadas para extraer el agua y la humedad a través de sus paredes. El
policarbonato reciclado llega a la secadora y se introducen en el tambor, este gira
impulsado por un motor el cual genera una fuerza centrífuga suficiente para
eliminar el agua y dejar el plástico seco.
1.4.3. Etapas de extrusión y ganseado o peletizado
La extrusión del plástico consiste en calentar y moldear el plástico procesado
anteriormente hasta obtener la forma deseada, en este caso de forma cilíndrica y
alargada. El material se funde a una temperatura y posteriormente, se moldea
pasando por un dado que le da la forma que se requiera. El proceso de extrusión
se realiza mediante una máquina extrusora.
El proceso de Ganseado es la última etapa del reciclaje mecánico y consiste en
cortar los filamentos de plástico hasta obtener el producto final: ganza o

10
pellets. Los filamentos que salen de la extrusora pasan a enfriarse y tras un baño
en agua van directamente hacia la máquina peletizadora. En esta etapa los
filamentos entran a la máquina donde se encuentran con un rotor de cuchillas
giratorio (8-10 cuchillas) que corta los filamentos en granos denominados granza o
gránulos los cuales tiene forma de pequeños cilindros de no más de 1 cm de alto.
Con este proceso concluye el reciclaje mecánico que tiene como producto final el
policarbonato reciclado que puede emplearse en la elaboración de distintos
productos.�10� Dado que el presente trabajo se enfocará a la etapa de extrusión
se describirá a continuación.
1.5. Componentes de una máquina extrusora
La máquina extrusora, que se emplea frecuentemente en el reciclado de plásticos,
está integrada por las siguientes partes:
• Motor.
• Engranes reductores.
• Tolva.
• Tornillo sinfín o husillo.
• Cañón o cilindro.
• Resistencias.
• Dado o boquilla.
El motor empleado en la máquina extrusora proporciona el movimiento angular a
él husillo de la máquina extrusora. Los engranes reductores, regulan la velocidad
de potencia con la que gira el husillo todo esto dependiendo del material que se va
a extruir en la máquina.
La tolva es el contenedor que se utiliza para introducir el material en la máquina,
está diseñada de manera que proporcione un flujo constante de material. Este flujo
es movido por gravedad ya que se mueve hacia la parte inferior de la tolva por
acción de su mismo peso.

11
El trabajo del tornillo sinfín o husillo es de llevar el plástico desde la alimentación
(tolva) hasta el extremo de descarga del cilindro (dado o boquilla). Este trabajo lo
realiza con ayuda del calor, el tornillo comprime y compacta el plástico de modo
que los fragmentos o gránulos introducidos en la alimentación se conviertan en
una masa continua, cuidando la homogeneidad del plástico tomando en cuenta su
temperatura, su composición y su calor.
El cañón o cilindro consiste en un tubo de acero torneado y provisto por una
camisa de refrigeración, algunas máquinas más modernas cuentan con un
recubrimiento templado y resistente a la corrosión. En esta sección de la máquina
es donde se produce la fundición del plástico.
Esta fundición puede ocasionarse por agua caliente, vapor sobrecalentado o en
este caso por la acción de resistencias eléctricas, las cuales tienen la tarea de
calentar el material que se encuentra dentro del cilindro.
Por último se encuentra el dado o boquilla, que tiene como función el moldear o
darle forma al plástico fundido dentro del cilindro, el cual es empujado por el
tornillo y por esa acción de empuje el plástico sale por el dado obteniendo la forma
que se desee [10].
1.5.1. Proceso de extrusión en el reciclado de discos compactos
La etapa de extrusión comienza con la llegada del plástico triturado y procesado a
la tolva de la extrusora, este plástico cae al cilindro principal (cañón) en donde se
encuentra el husillo o tornillo sinfín del extrusor. El husillo gira concéntricamente
en el cañón impulsado por el motor eléctrico, cuya potencia y velocidad se reduce
para hacer girar al husillo. En este momento el material comienza a fluir y fundirse
a través del cañón debido al empuje y giro continuo del husillo y a la acción de las
resistencias que se encuentran en el cilindro, las cuales aumentan la temperatura
hasta valores entre 240 °C y 260 °C aproximadamente, que es la temperatura de
fundición del policarbonato. Esta temperatura se alcanza paulatinamente por lo

12
que la longitud del husillo va a estar divido en cuatro zonas (o más, dependiendo
el polímero a extruir) las cuales tendrá diferentes temperatura. La zona 1 tendrá
una temperatura donde 30 °C hasta 70 °C, la zona 2 donde 70 °C hasta 150 °C, la
zona 3 donde 150 °C hasta 220 °C y la zona 4 con una temperatura de 220 °C
hasta 250 °C.
Con esta temperatura se asegura que el plástico recién extruido no tiene
irregularidades en su consistencia y propiedades así como asegurar la protección
de la máquina extrusora En la figura 1.1 se puede observar las partes que
constituyen a un extrusor.
Figura 1.1. Partes principales del extrusor.
El plástico fundido llega al final del recorrido donde pasa por el dado (boquilla). En
el caso del reciclaje del plástico, el dado tiene una perforación circular central que
da forma de filamento al plástico fundido que es empujado por el husillo. Llegando

13
a este punto, se obtienen filamentos de plástico caliente que deben ser enfriados,
para ello los filamentos salientes de la extrusora pasan directamente a un baño de
agua donde se enfrían para su corte posterior �10�.
1.6. Controlador PID
Un controlador es el dispositivo que proporciona una señal correctora que
constantemente es enviada al elemento final de control de algún proceso, con el
fin de mantener las condiciones deseadas en el sistema a controlar y hacer que
esas condiciones mantengan al valor obtenido en el sistema lo más próximo al
valor deseado. Existen varios tipos de controladores que pueden ser usados
dentro de diferentes procesos en la industria tales como el Proporcional (P),
Proporcional-Integral (PI), Proporcional-Derivativo (PD) y el Proporcional-Integral-
Derivativo (PID) [4].
Un controlador Proporcional-Integral-Derivativo también llamado PID combina en
un mismo controlador los tres tipos de acciones para obtener todas sus ventajas.
A continuación se explica el funcionamiento que tiene cada una de las acciones
que constituyen al controlador PID [1].
La acción proporcional corrige la posición de un elemento final de control en
proporción a la desviación que se tiene. Es de efecto instantáneo, pero suele
presentar una desviación permanente. La acción integral mueve al elemento final
de control a una velocidad proporcional a la señal de error. Es de efecto lento y
progresivo, pero sigue actuando hasta eliminar la desviación permanente. La
acción derivativa corrige la posición del elemento final de control en una cantidad
proporcional a la velocidad de cambio de la desviación o error. Con esto se
produce un efecto anticipado al tener en cuenta la tendencia de la variable
controlada [2].
14
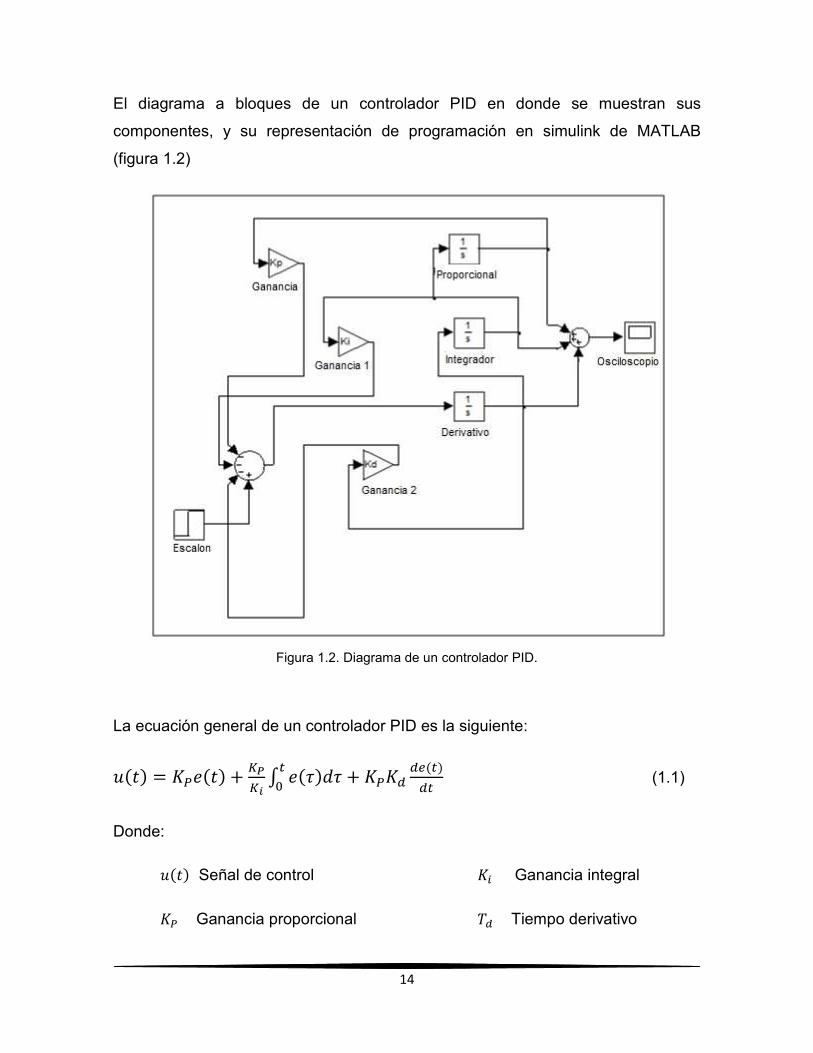
El diagrama a bloques de un controlador PID en donde se muestran sus
componentes, y su representación de programación en simulink de MATLAB
(figura 1.2)
Figura 1.2. Diagrama de un controlador PID.
La ecuación general de un controlador PID es la siguiente:
�� = ����� + ����� ����� + ���� ����
���� (1.1)
Donde:
�� Señal de control
�� Ganancia proporcional
�� Ganancia integral
�� Tiempo derivativo

15
1.6.1. Ventajas
El controlador PID dentro de cualquier proceso tiene la ventaja de conjuntar las
ventajas de las acciones proporcional, derivativa e integral, en un solo dispositivo
que controla cualquier proceso de forma eficiente y adecuada. Algunas de las
ventajas que se obtiene de este controlador son las siguientes:
• Facilidad de comprobar sus resultados.
• Aplicación rápida y fácil.
• Monitoreo del error.
• Elimina cualquier tipo de desfasamiento dentro del sistema.
• Mayor velocidad de respuesta a las variaciones dentro del sistema.
• Mantiene la variable controlada tan cerca de su punto de referencia como
sea posible.
• Simplifica las labores de los operadores.
• Ejerce un mejor control sobre las operaciones.
Con estos puntos a favor, los controladores PID son una de las mejores opciones
para diversas aplicaciones industriales �4�.
1.6.2. Usos en la industria
Los controladores PID se utilizan en aplicaciones y procesos en donde se requiere
controlar presión, flujo, nivel, temperatura, velocidad entre otras variables.
También se puede utilizar en muchas aplicaciones químicas, y en otras variables
[13]. Algunas de sus aplicaciones son las siguientes:
• Reguladores de velocidad
• Temperatura (aire acondicionado, calentadores, refrigeradores, entre otros).
• Nivel (Nivel en tanques de líquidos como agua, lácteos, mezclas, crudo,
etc.).

16
• Presión (para mantener una presión predeterminada en tanques, tubos,
recipientes, por mencionar algunos.).
• Flujo (mantienen la cantidad de flujo dentro de una línea o tubería).
1.6.3. Reglas de sintonización de un controlador PID
Las reglas de sintonización se utilizan cuando el modelo matemático de la planta
es tan complicado que no es fácil de obtener, tampoco es posible un enfoque
analítico para el diseño de un controlador PID. El proceso de seleccionar los
parámetros del controlador (ganancias) que cumplan con las características
deseadas se conoce como sintonización del controlador. Ziegler y Nichols
sugirieron más reglas para sintonizar los controladores PID (lo cual significa
establecer ��, �� y ��). Las reglas de Ziegler-Nichols son muy convenientes
cuando no se conocen los modelos matemáticos de las plantas [16].
Figura 1.3. Sobrepaso máximo de 25% a la entrada escalón al sistema.

17
Ziegler y Nichols propusieron unas reglas para determinar los valores de la
ganancia proporcional ��, del tiempo integral �� y del tiempo derivativo ��, con
base en las características de respuesta transitoria de una planta especifica. Tal
determinación de los parámetros de los controladores PID o de la sintonización de
los controles PID la realizadas mediante experimentos sobre la misma planta o
sistema. Existen dos métodos denominados reglas de sintonización de Ziegler-
Nichols. En ambos se pretende obtener un 25% de sobrepaso máximo en la
respuesta escalón (figura 1.3).
En el primer método, la respuesta de la planta a una entrada escalón unitario se
obtiene de manera experimental. Si la planta no contiene integradores ni polos
dominantes complejos conjugados, la curva de respuesta escalón unitario puede
tener forma de S, como se observa en la figura 1.4. Si la respuesta no exhibe una
curva con forma de S, este método no es pertinente. Tales curvas de respuesta
escalón se generan experimentalmente o a partir de una simulación dinámica de la
planta [16].
Figura 1.4. Respuesta de escalón unitario.

18
La curva con forma de S se caracteriza por dos parámetros: el tiempo de retardo L
y la constante de tiempo T. El tiempo de retardo y la constante de tiempo se
determinan dibujando una recta tangente en el punto de inflexión de la curva con
forma de S y determinando las intersecciones de esta tangente con el eje del
tiempo y la línea ��� = �. En este caso, la función de transferencia !�"!�
se
aproxima mediante un sistema de primer orden con un retardo de transporte del
modo siguiente:
!�"!�
= ��$%!&'() (1.2)
Ziegler y Nichols sugirieron establecer los valores de ��, �� y �� de acuerdo con la
ecuación de la tabla 1.3.
Tabla 1.3. Cálculo de ganancias de Ziegler-Nichols.
Tipo de
controlador *+ ,- ,.
P
0
PI
0
PID
2L 0.5L
El controlador PID sintonizado mediante el primer método de las reglas de Ziegler-
Nichols da como resultado:
/0'� = �� 11 + )&�'
+ ��23 (1.3)
/0'� = 1.2 &6 11 +
)76' + 0.5923 = 0.6 1'(;%3
<
' (1.4)
19
1.6.4. Método de identificación por datos estadísticos de Ziegler-
Nichols.
Los métodos de Ziegler-Nichols son dos métodos clásicos de ajuste empírico de
los parámetros de un controlador PID. Fueron presentados por los antes
mencionados autores en 1942. Estos métodos son ampliamente utilizados, en su
forma original o con versiones mejorados. Ambos métodos se basan en la
determinación de algunas características de la respuesta del proceso, temporal o
frecuencial, para establecer a partir de dichas características y por medio de unas
respuestas con tasa de decaimiento de un cuarto entre valores de la primera y
segunda sobreoscilación.
El método de identificación por datos estadísticos de Ziegler-Nichols se basa por
el método de la respuesta a un escalón el cual se basa principalmente en la
observación de la respuesta en lazo abierto del sistema ante una entrada escalón.
Analizando dicha respuesta, se determina dos o tres parámetros que se obtienen
de la siguiente forma:
Método con dos parámetros
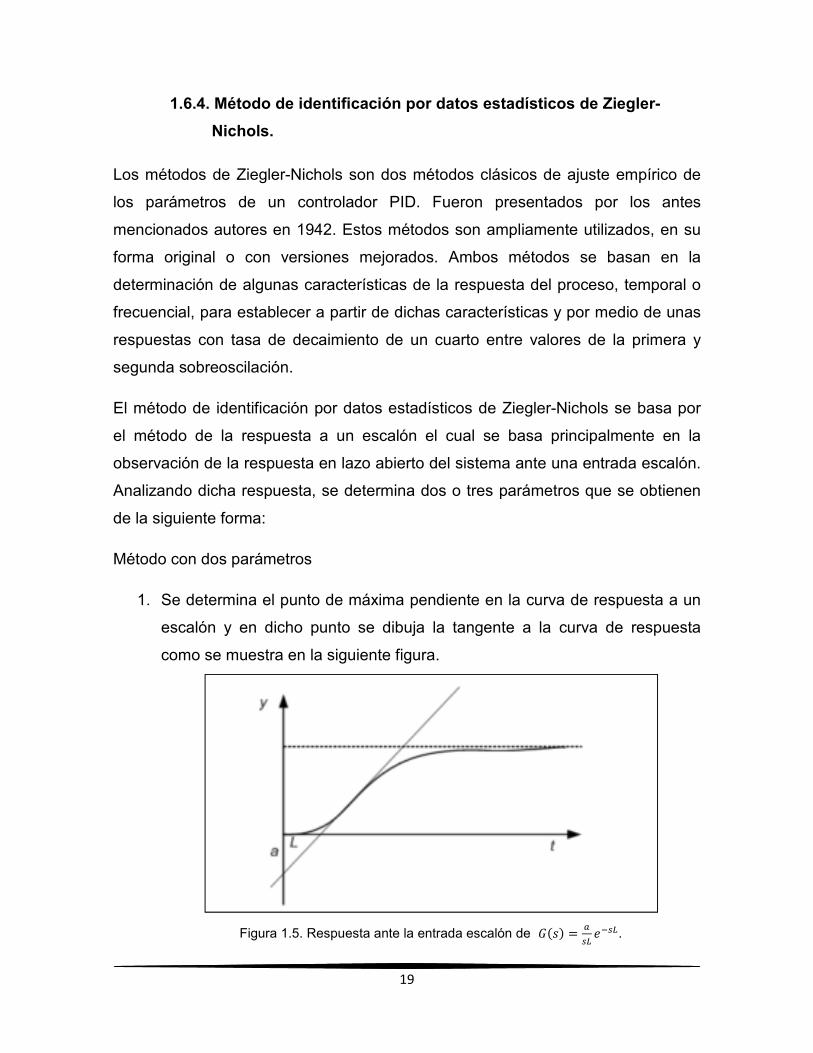
1. Se determina el punto de máxima pendiente en la curva de respuesta a un
escalón y en dicho punto se dibuja la tangente a la curva de respuesta
como se muestra en la siguiente figura.
Figura 1.5. Respuesta ante la entrada escalón de /2� = ='6 �
>'6.

20
Se determina la intersección de la tangente obtenida anteriormente con los ejes de
coordenadas, y se obtienen las distancias a y L. Estos dos parámetros
corresponden a la respuesta teórica de un modelo matemático de la forma
/2� = ='6 �
>'6 (1.5)
/2� = ��$?@!A'() (1.6)
Donde:
� = Ganancia del proceso en estado estacionario
�� = Tiempo muerto efectivo del proceso
� = Constante efectiva del proceso
Que corresponde a un integrador con retardo temporal. En sistema permite
ser caracterizado por dos parámetros a y L tal y como se puede observar
en la figura 1.5.
2. Una vez que se ha determinado los parámetros a y L en la respuesta,
Ziegler y Nichols proponen como parámetros del controlador PID los
indicadores en la tabla 1.4 obtenidos directamente como función de los
parámetros a y L medidos sobre la respuesta del sistema.
Tabla 1.4 Parámetros propuestos por Ziegler-Nichols para el método de respuesta a un
escalón
Controlador * ,- ,.
P 1 BC
PI 0.9 BC 39
PID 1.2 BC 29 9 2C

21
Este controlador está diseñado para dar una respuesta de decaimiento de un
cuarto (d=25) entre las magnitudes de la primera y la segunda sobreoscilación, por
lo que generalmente presenta una sobreoscilación alta. Tiene la ventaja de que a
partir de estos valores es fácil realizar un ajuste más fino para adecuarlos a la
respuesta que se desea sin la necesidad de un largo proceso de prueba y error.
En la figura 1.6 se muestra el primer método donde se utiliza la línea tangente a la
curva de reacción del proceso, el punto de razón máxima de cambio ocurre en
� = ��.
Figura 1.6. Respuesta escalón de un proceso de primer orden más tiempo muerto
De la figura 1.6, se aprecia que la línea de razón máxima de cambio intercepta a la
línea del valor inicial en � = ��, y a la línea de valor final en � = �� + �. Por lo que,
se deduce el trazo para determinar �� y � como se muestra en la figura 1.7, la
línea se traza tangente a la curva de reacción del proceso real en el punto de
reacción máxima de cambio.
La respuesta del modelo en que se emplean los valores de �� y � se ilustra con la
línea punteada. La respuesta del modelo que se obtiene con este método no
coincide muy bien con la respuesta real.

22
Figura 1.7 Parámetros del modelo que se obtiene mediante el primer método
En el segundo método �� se determina de la misma manera que en el método 1,
pero con el valor de � se obliga a que la respuesta del modelo coincida con la
respuesta real en � = �� + �. Este punto es ∆F�� + �� = 0.632∆F' .
Figura 1.8 Parámetros del modelo que se obtiene mediante el segundo método.
Se observa que la comparación entre la respuesta del modelo y la real es mucho
más cercana que con el primer método, como se muestra en la figura 1.8. El valor
de la constante de tiempo � que se obtiene con el segundo método es
generalmente menor al que se obtiene con el primer método.

23
Tercer método, al determinar �� y � con los dos métodos anteriores, el paso de
menor precisión es el trazo de la tangente en el punto de razón máxima de cambio
de la curva de reacción del proceso. Aun en el segundo método, donde el valor de
�� + �� es independiente de la tangente, los valores que se estiman para �� y � dependen de la línea. Para eliminar esa dependencia los valores de �� y � se
seleccionen de tal manera que la respuesta del modelo y la real coincidan en la
región de alta tasa de cambio. Los dos puntos que se toman están dados por
�� + 1 3�C � y �� + ��, y para la localización de dichos puntos se utilizan las
siguientes ecuaciones.
∆F�� + �� = 0.632∆F' (1.7)
∆ G�� + )H �I = 0.238∆F' (1.8)
Estos dos puntos se muestran en la figura 1.9, se denominan �7 y �), respectivamente. Los valores de �� y � se pueden obtener fácilmente mediante la
simple solución del siguiente sistema de ecuaciones:
Donde:
�)= tiempo en el cual ∆F' = 0.283∆F' �7= tiempo en el cual ∆F' = 0.632∆F'
Figura 1.9 Parámetros del modelo que se obtienen mediante el tercer método.

24
Una vez establecido el marco de referencia para el desarrollo del presente trabajo,
en el siguiente capítulo se estable la simulación del control de temperatura en el
extrusor.

CAPÍTULO 2.
SIMULACIÓN DEL
CONTROL DE
TEMPERATURA

25
2.1. Modelo matemático del extrusor
Para realizar el modelado del sistema se debe de ubicar en el proceso de
reciclado de discos compactos. Inicialmente se ubica la parte del proceso a
controlar, tal y como se apreciar en la figura 2.1.
Figura 2.1. Proceso de reciclado de los discos compactos.
En la etapa de extrusión, es donde se analizó y se propuso el control de la
temperatura. Como ya se mencionó en el capítulo anterior la etapa de extrusión es
la más importante dentro del proceso de reciclado de los discos compactos, por tal
motivo, se conocerán las etapas que son llevadas a cabo en la máquina extrusora
y realizar un modelado del sistema, como se observa en la figura 2.2.
Recepción de
los discos
compactos
Preparación de
los discos
compactos
Etapa de
molienda
Etapa de
lavadoEtapa de
secado
ETAPA DE EXTRUSIÓN
Etapa de
peletizado
Salida del
policarbonato
reciclado

26
Figura 2.2. Identificación de las etapas del extrusor.
El modelado se puede realizar a partir de los siguientes datos:
• Tiempo que tarda en salir el policarbonato del extrusor (200 a 220s).
• Temperatura requerida para fundir en policarbonato (250 °C ±10 °C).
• Temperatura de cada una de las zonas de calentamiento de la máquina
extrusora (Zona 1 (30-70 °C), Zona 2 (70-150 °C), Zona 3 (150-220°C) y
Zona 4 (220-250 °C).
Utilizando el método de “Identificación por datos estadísticos de Ziegler-Nichols”
se obtiene la función de transferencia del sistema. Este método se aplica cuando
no se tiene demasiada información sobre el sistema y se desea encontrar la
función de transferencia del sistema estudiado. En este caso, como la extrusora
cuenta con 4 zonas de calentamiento se obtendrán 4 funciones de transferencia,
una para cada zona debido a que en cada zona la temperatura no es la misma. Es
necesario identificar los datos que se tienen del sistema, en este caso las
temperaturas de fusión de las zonas de calentamiento y el tiempo que tarda el
policarbonato dentro del extrusor (Tabla 2.1).
DISCOS COMPACTOS MOLIDOS
Entrada del policarbonato a la
tolva
Empuje del policarbonato por accion del giro de
husillo
Zona de calentamiento 1
Zona de calentamiento 2
Zona de calentamiento 3
Zona de calentamiento 4
Salida del policarbonato por
el dado
POLICARBONATO RECICLADO
27
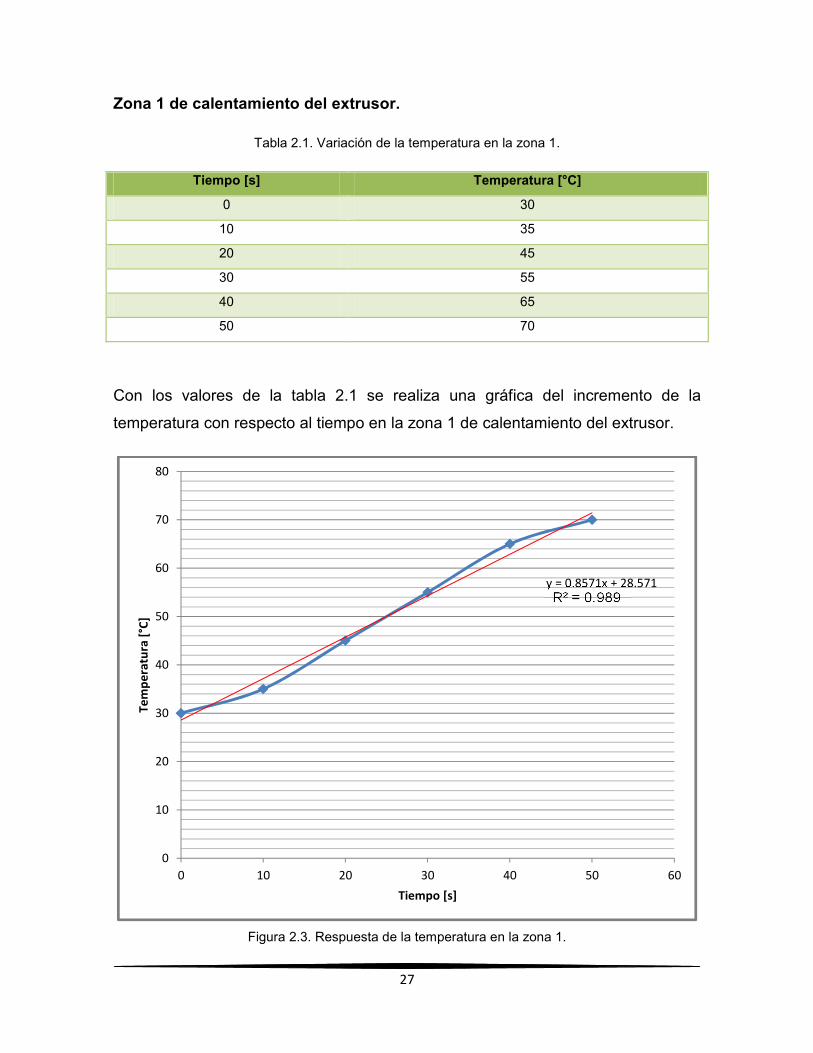
Zona 1 de calentamiento del extrusor.
Tabla 2.1. Variación de la temperatura en la zona 1.
Tiempo [s] Temperatura [°C]
0 30
10 35
20 45
30 55
40 65
50 70
Con los valores de la tabla 2.1 se realiza una gráfica del incremento de la
temperatura con respecto al tiempo en la zona 1 de calentamiento del extrusor.
Figura 2.3. Respuesta de la temperatura en la zona 1.
y = 0.8571x + 28.571
0
10
20
30
40
50
60
70
80
0 10 20 30 40 50 60
Tem
pe
ratu
ra [
°C]
Tiempo [s]

28
Zona 2 de calentamiento del extrusor.
Tabla 2.2. Variación de la temperatura en la zona 2.
Tiempo [s] Temperatura [°C]
50 70
65 85
75 95
85 115
95 125
100 150
Con los valores de la tabla 2.2 se realiza una gráfica del incremento de la
temperatura con respecto al tiempo en la zona 2 de calentamiento del extrusor.
Figura 2.4. Respuesta de la temperatura en la zona 2.
y = 8.5571x + 68.048
0
20
40
60
80
100
120
140
160
50 60 70 80 90 100 110
Tem
pe
ratu
ra [
°C]
Tiempo [s]

29
Zona 3 de calentamiento del extrusor.
Tabla 2.3. Variación de la temperatura en la zona 3.
Tiempo [s] Temperatura [°C]
100 150
115 175
125 183
135 194
145 205
150 220
Con los valores de la tabla 2.3 se realiza una gráfica del incremento de la
temperatura con respecto al tiempo en la zona 3 de calentamiento del extrusor.
Figura 2.5. Respuesta de la temperatura en la zona 3.
y = 6.4429x + 155.62
0
50
100
150
200
250
100 110 120 130 140 150 160
Tem
pe
ratu
ra [
°C]
Tiempo [s]

30
Zona 4 de calentamiento del extrusor.
Tabla 2.4. Variación de la temperatura en la zona 4.
Tiempo [s] Temperatura [°C]
150 220
165 228
175 234
185 240
195 245
200 250
Con los valores de la tabla 2.4 se realiza una gráfica del incremento de la
temperatura con respecto al tiempo en la zona 4 de calentamiento del extrusor.
Figura 2.6. Respuesta de la temperatura en la zona 4.
y = 2.9571x + 221.38
215
220
225
230
235
240
245
250
255
150 160 170 180 190 200 210
Tem
pe
ratu
ra [
°C]
Tiempo [s]

31
A partir de las gráfica 2.3, 2.4, 2.5 y 2.6 se obtienen cada una de las ecuaciones
de la recta pendiente correspondiente a cada una de las zonas de calentamiento y
para calcular las funciones de transferencia de las 4 zonas de calentamiento del
extrusor. Una vez obtenida la ecuación de cómo se comporta el sistema (zona 1)
se procede a calcular los tiempos (��, ��) requeridos por el método que se está
utilizando.
Estos cálculos se deben de realizar para las 4 zonas de calentamiento con sus
respectivos valores, en la tabla 2.5 se muestran los valores necesarios para las
funciones de transferencia de las 4 zonas de calentamiento.
y=mx + b
y = 0.8571x + 28.571
T(t)=0.8571t + 28.571
Cálculo de los tiempos (��, ��) de la zona 1 de calentamiento:
�� = ��� − �� ∗ 0.283� ��� = ��� − �� ∗ 0.632
�
�� = �70 − 30� ∗ 0.2830.8571 ��� = �70 − 30� ∗ 0.632
0.8571
�� = 13.20���� = 29.49�
��, �� indican el tiempo que obtendrán los porcentajes ya establecidos por el
método con respecto a la temperatura que se tendrá en la zona 1 de
calentamiento. Como la ecuación del comportamiento del sistema es de primer
orden, la función de transferencia será del mismo orden por lo que tendrá la
siguiente forma:
���� = ��� + 1
32
El valor de “K” se le asignará un valor unitario para facilitar y hacer que las
funciones de transferencia tengan la forma de un sistema de primer orden. Una
vez obtenidos los tiempos requeridos se calcula "�":
� = 32 ��� − ���� = 3
2 �29.49 − 13.20�� = 24.435�
Por lo tanto la función de transferencia en lazo abierto de la zona 1 del extrusor es
la siguiente:
���� = 124.435� + 1
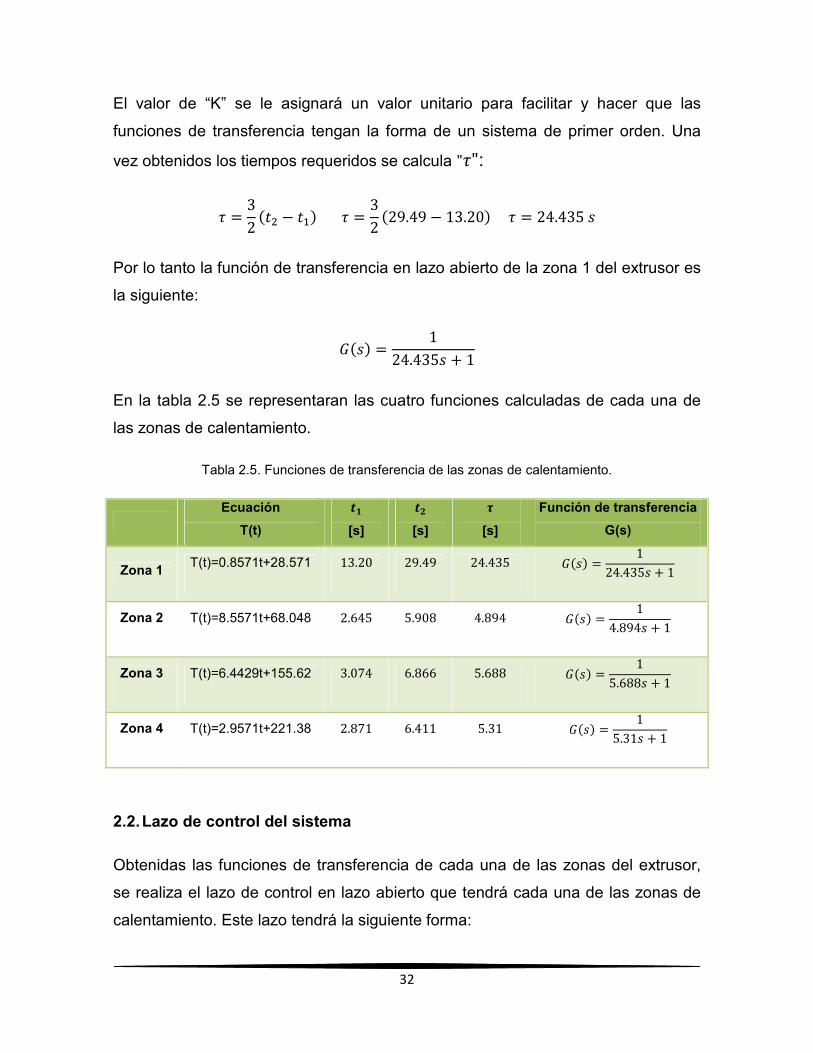
En la tabla 2.5 se representaran las cuatro funciones calculadas de cada una de
las zonas de calentamiento.
Tabla 2.5. Funciones de transferencia de las zonas de calentamiento.
Ecuación
T(t)
!" [s]
!# [s]
$ [s]
Función de transferencia
G(s)
Zona 1 T(t)=0.8571t+28.571 13.20 29.49 24.435 ���� = 1
24.435� + 1
Zona 2 T(t)=8.5571t+68.048 2.645 5.908 4.894 ���� = 14.894� + 1
Zona 3 T(t)=6.4429t+155.62 3.074 6.866 5.688 ���� = 15.688� + 1
Zona 4 T(t)=2.9571t+221.38 2.871 6.411 5.31 ���� = 15.31� + 1
2.2. Lazo de control del sistema
Obtenidas las funciones de transferencia de cada una de las zonas del extrusor,
se realiza el lazo de control en lazo abierto que tendrá cada una de las zonas de
calentamiento. Este lazo tendrá la siguiente forma:

33
Figura 2.7. Lazo de control abierto.
Por lo tanto las funciones de transferencia de cada una de las zonas de
calentamiento se presentan en la figura 2.8, en donde cada lazo tiene una señal
de prueba (step) que es un impulso al sistema, el bloque de función de
transferencia es donde se le asignan los valores del numerador y denominador de
la función de transferencia previamente calculada y por último un osciloscopio que
ayudará a mostrar una respuesta gráfica en este caso de las funciones de
transferencia de las zonas de calentamiento del extrusor.
Figura 2.8. Lazos de control abiertos de las 4 zonas de calentamiento.
En la figura 2.9 se observa la respuesta de cada función de transferencia, en
donde se aprecia su comportamiento, tiempo de estabilización y el tiempo en el
cual llega al valor deseado (temperatura deseada).
señal de prueba osciloscopio
1
s+1
funcion de transferencia

34
Figura 2.9. Respuesta de las 4 zonas de calentamiento en lazo abierto.
Todas las respuestas de las zonas de calentamiento inician en cero ya que el
sistema se encuentra en lazo abierto tal y como se puede observar en la figura
2.8, cada una de las zonas de calentamiento están conectadas
independientemente una de las otras y eso ocasiona que todas las respuestas
inicien en cero.
Como se observa en la figura 2.9, están presentes 4 respuestas, donde la
respuesta en color amarillo corresponde a la zona 1 la respuesta en color morado
corresponde a la zona 2 la respuesta en color turquesa a la zona 3 y por último la
respuesta en color rojo a la zona 4. Si a los lazos anteriores se les ingresa una
perturbación, el sistema no controla ni compensa las perturbaciones entrantes al
sistema. En la figura 2.10 se observa cómo responden los sistemas sin ningún
control ni retroalimentación.
Te
mp
era
tura
[°C
]
Tiempo [s]
Zona 4
Zona 3
Zona 2
Zona 1

35
Figura 2.10. Respuesta de las 4 zonas de calentamiento en lazo abierto con perturbaciones.
Como se observa en la figura 2.10, los sistemas no tienen ningún control a las
perturbaciones entrantes a los mismos, ya que la perturbación está aumentando la
temperatura radicalmente en cada una de las zonas sin estabilizarlas a los valores
requeridos. Teniendo en cuenta la falta de control en el lazo abierto en el sistema
no es necesario conocer el comportamiento del sistema a 200s. Como se
mencionó anteriormente en las respuestas de color amarillo, morado, turquesa y
rojo corresponden a las zonas 1, 2 ,3 y 4 respectivamente.
Ahora se observa la respuesta del sistema cuando existe una retroalimentación y
para comparar como cambian las respuestas entre un lazo abierto y uno cerrado.
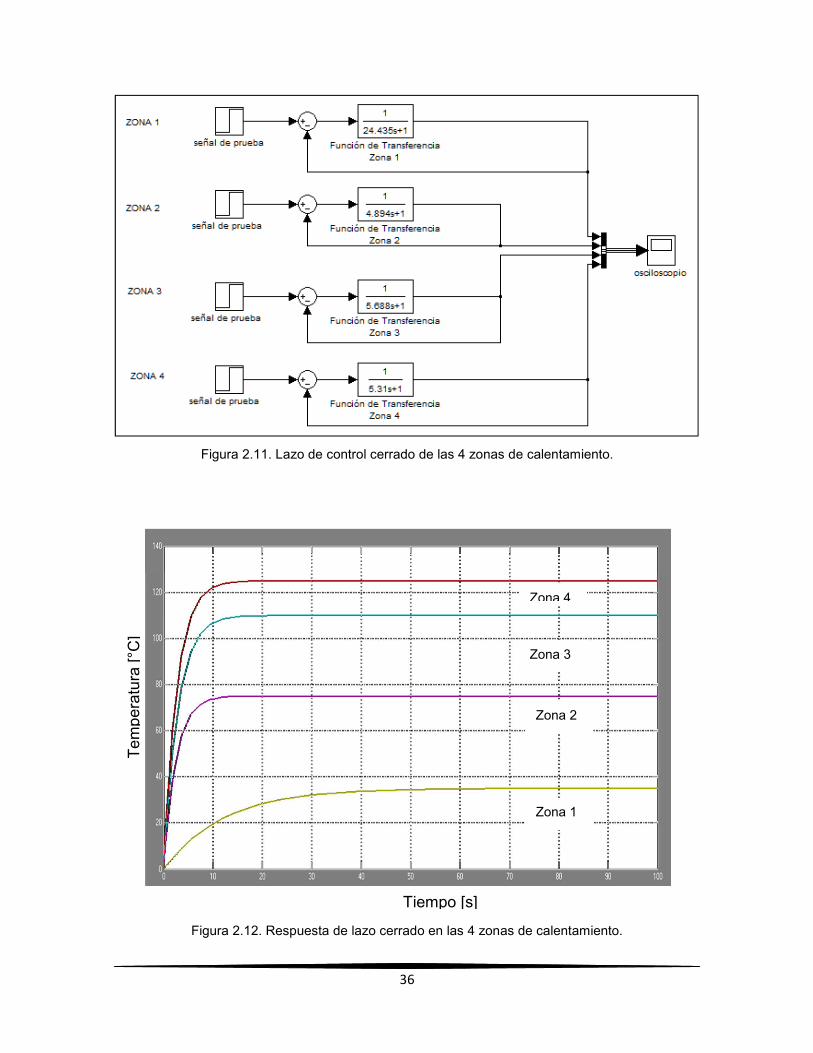
El lazo de control se observa en la figura 2.11. En la figura 2.12 se muestra la
respuesta de este sistema.
Te
mp
era
tura
[°C
]
Tiempo [s]
Zona 4
Zona 3
Zona 2
Zona 1
36
Figura 2.11. Lazo de control cerrado de las 4 zonas de calentamiento.
Figura 2.12. Respuesta de lazo cerrado en las 4 zonas de calentamiento.
Te
mp
era
tura
[°C
]
Tiempo [s]
Zona 4
Zona 3
Zona 2
Zona 1

37
Como se observa en la figura 2.12 el tiempo de estabilización es menor a la
respuesta de un lazo abierto (figura 2.9), pero no llega a los valores que se desean
(temperaturas de las zonas de calentamiento). Para solucionar este problema se
implemento un controlador PID y para obtener las temperaturas de las zonas de
calentamiento y un tiempo de estabilización mayor, por lo tanto el lazo de control
que se utilizo es el de la figura 2.13 que se muestra a continuación.
Figura 2.13. Lazo de control con controlador PID.
2.3. Sintonización del controlador PID
El uso de un controlador PID en el control de temperatura del extrusor, requiere de
una sintonización de las ganancias que necesita el controlador para un correcto
funcionamiento y una respuesta del sistema que cumpla con las condiciones que
se están buscando para el control de temperatura. Por lo que se deben de calcular
las ganancias que necesita el controlador PID, estas ganancias se calculan por el
método de sintonización de Ziegler-Nichols (1%& método).

38
Este procedimiento se realiza para cada una de las zonas de calentamiento del
sistema, los resultados de las ganancias para cada zona se muestran en la tabla
2.6. Para la zona 1 se tiene la siguiente función de transferencia:
���� = 124.435� + 1
A partir de esta función y de los tiempos calculados (��, ���se determina el tiempo
de retraso �'�: ' = ��� − ��
Donde:
�� = 29.49��� = 24.435�
Por lo tanto el tiempo de retraso �'� es:
' = �29.49� − 24.435�� ' = 5.055�
Obtenidos los datos anteriores se calculan los valores de las ganancias (�(, �) y
�*), las cuales se obtienen a partir de la tabla 1.2 tal y como se muestra a
continuación.
�( = 12 +�',�* = 2�'��) = 0.5�'�
�( = 12 -24.435�5.055� .�* = 2�5.055���) = 0.5�5.055��
�( = 2.416�* = 10.11��) = 2.527�
Los valores obtenidos (�(, �) y �*), son las ganancias necesarias para el
controlador PID que se utilizo y para obtener un funcionamiento óptimo con las
respuestas que se requieren.

39
Tabla 2.6. Ganancias en las 4 zonas de calentamiento.
$ [s] / [s] 01 23 [s] 24 [s]
Zona 1 24.435 5.055 2.416 10.11 2.527
Zona 2 4.894 1.013 5.797 2.026 0.506
Zona 3 5.688 1.178 5.794 2.356 0.589
Zona 4 5.31� 1.101 5.787 2.202 0.550
.
2.4. Simulación del sistema
Una vez obtenidas las ganancias del controlador, se pueden aplicar los valores
dentro del bloque del controlador PID en la simulación y ver cómo responderá el
sistema con estas características, (figura 2.14).
Figura 2.14. Código de programación del sistema con el controlador PID.

40
Siguiendo el mismo lazo de control de la figura 2.14 y una vez realizado la
asignación de los valores de las ganancias tabla 2.6 se realizo una simulación
para observar el comportamiento del sistema (figura 2.15).
Figura 2.15. Respuesta del sistema con el controlador PID.
Como se aprecia en la figura 2.15 el controlador realiza la función deseada, tiene
un sobre impulso en las 4 zonas de calentamiento de aproximandamente 10 °C y
su tiempo de estabilizacion es aproximadamente de 12 segundos a 15 segundos.
Por lo tanto la señal de respuesta del sistema cumple sus caracteristicas, ahora se
realiza una simulación cuando existe una perturbación. Esta perturbacion será un
cambio de temperatura en alguna de las zonas de calentamiento o en caso de que
salga de los límites de temperatura donde el policarbonato ya no cumpla con las
propiedades requeridas o tape el dado del extrusor.
Te
mp
era
tura
[°C
]
Tiempo [s]

41
En la figura 2.16 se representa el lazo de control pero se le añaden perturbaciones
al sistema para observar como es el comportamiento del sistema y corroborar que
el controlador y las ganancias del mismo cumplan su tarea de controlar al sistema.
Figura 2.16. Lazo de control implementando el controlador PID con perturbaciones.
El resultado de la simulación se observará en la figura 2.17, la cual presenta 4
gráficas, donde las gráficas amarilla y morada corresponden a las zonas de
calentamiento 1 y 2 y las gráficas turquesa y roja a las zonas de calentamiento 3 y
4. En la primera gráfica (zona 1) se simula que el material no está entrando a la
temperatura inicial de la zona que es de 30 °C, si no que está entrando a una
temperatura de 20 °C, se observa que el controlador controla el cambio de
temperatura estabilizando al sistema aproximadamente entre 3 s y/o 4 s.
En la segunda gráfica (zona 2) se simuló un cambio de temperatura de 90 °C
cuando en la zona de calentamiento 2 es necesario alcanzar una temperatura de
150 °C nuevamente el controlador actúa y compensa esa variación y se estabiliza

42
en 3 s y 3.5 s. En la tercer y cuarta gráfica (zona 3 y 4) existen variaciones de 200
°C y 270 °C respectivamente que de igual manera el controlador realiza la
corrección de las temperaturas para cada una de las zonas correspondientes en
un tiempo aproximado de 3 s a 3.5 s.
Figura 2.17. Respuesta del controlador PID con perturbaciones.
Cabe resaltar que las figuras 2.15 y 2.17, las gráficas comienzan en cero porque
es una simulación de cómo va a responder el controlador en caso de que exista
una perturbación en el sistema o solo observar la respuesta del controlador en un
inicio, por tal motivo no es necesario que cada una de las gráficas comiencen en
los tiempos establecidos para cada zona de calentamiento.
Se necesita que el controlador tenga un tiempo de respuesta más rápido, por lo
tanto realizando más pruebas y cambios en los valores de las ganancias del
Te
mp
era
tura
[°C
]
Tiempo [s]

43
controlador, se obtuvieron las ganancias que cumplen con los requisitos que
ayudaron a un mejor funcionamiento del controlador.
Tabla 2.7. Asignación de las ganancias mejoradas al controlador PID.
01 23 24
Zona 1 11.856 0.544 0.436
Zona 2 12.479 2.626 0.069
Zona 3 11.327 2.134 0.302
Zona 4 11.327 2.286 -2.640
Figura 2.18. Respuesta del controlador PID con ganancias mejoradas y perturbaciones al sistema.
Como se observa en la figura 2.18, el tiempo de respuesta del controlador se
redujo considerablemente, el controlador responde a las perturbaciones que sufre
el sistema casi instantáneamente entre 1s o 2s para estabilizar al sistema. Aunque
Te
mp
era
tura
[°C
]
Tiempo [s]

44
aún existe un sobreimpulsó, este no afecta la temperatura del extrusor ya que el
controlador compensa esos picos y no afecta mínimamente al policarbonato
dentro del extrusor.
Utilizando los fundamentos teóricos en el primer capítulo se realizó el cálculo,
diseño y simulación del control de temperatura de la etapa de extrusión, con esto
se podrá analizar el comportamiento del extrusor cuando tenga o no un
controlador PID. En el último capítulo se analizaran casos especiales del
comportamiento de la temperatura en la máquina extrusora para analizar su
comportamiento.

CAPÍTULO 3.
ANÁLISIS DE RESULTADOS

45
3.1. Control de temperatura con una perturbación de 20 °C en la zona 1 de
calentamiento
Con base a las respuestas del controlador y el sistema obtenidos en el capítulo
anterior, se realizaron pruebas con tres perturbaciones específicas. La primera
perturbación se encuentra en la zona 1 con una temperatura entrante de 20 °C, la
segunda perturbación está en la zona 4 con una temperatura de 239 °C y la última
perturbación se localiza en la zona 4 con una temperatura de 261 °C.
Figura 3.1. Perturbación zona 1 de 20 °C.
La figura 3.1 muestra la zona de calentamiento 1, en esta zona la temperatura que
se debe alcanzar es de 30 °C - 70 °C en un tiempo de 50 s, la perturbación
simulada establece que a 40 s después de haber comenzado el proceso de
extrusión, el sensor posicionado en la zona 1 sensa que la temperatura de entrada
del plásticos es 10 °C menor a la establecida por lo tanto el controlador realiza la
función de restablecer la temperatura en el menor tiempo posible.
En la respuesta de la gráfica podemos observar como existe una variación en la
temperatura del sistema a 40 s de empezar el proceso de extrusión, se puede
Temperatura [°C
]
Tiempo [s]

46
observar como disminuye la temperatura de una temperatura estable de 70° C a
50° C. Posteriormente el controlador entra en acción, el controlador estabiliza y
controla la temperatura obligándola a volver a la temperatura que se requiere en
la zona 1. El controlador tarda aproximadamente 10 s en restablecer la
temperatura (70° C), con esto se garantiza que el policarbonato que esta siendo
extruido no tendrá algún cambio en sus propiedades y no dañara a la máquina
extrusora.
Se propuso una perturbación de 20 °C con el propósito de ejemplificar que pasa
cuando el medio ambiente tiende a bajas temperaturas, como en la temporada de
invierno. Por lo tanto el controlador propuesto está realizando su funcionamiento
correctamente.
3.2. Control de temperatura con una perturbación de 239 °C en la zona 4 de
calentamiento
Figura 3.2. Perturbación zona 4 de 239 °C
Temperatura [°C
]
Tiempo [s]
47
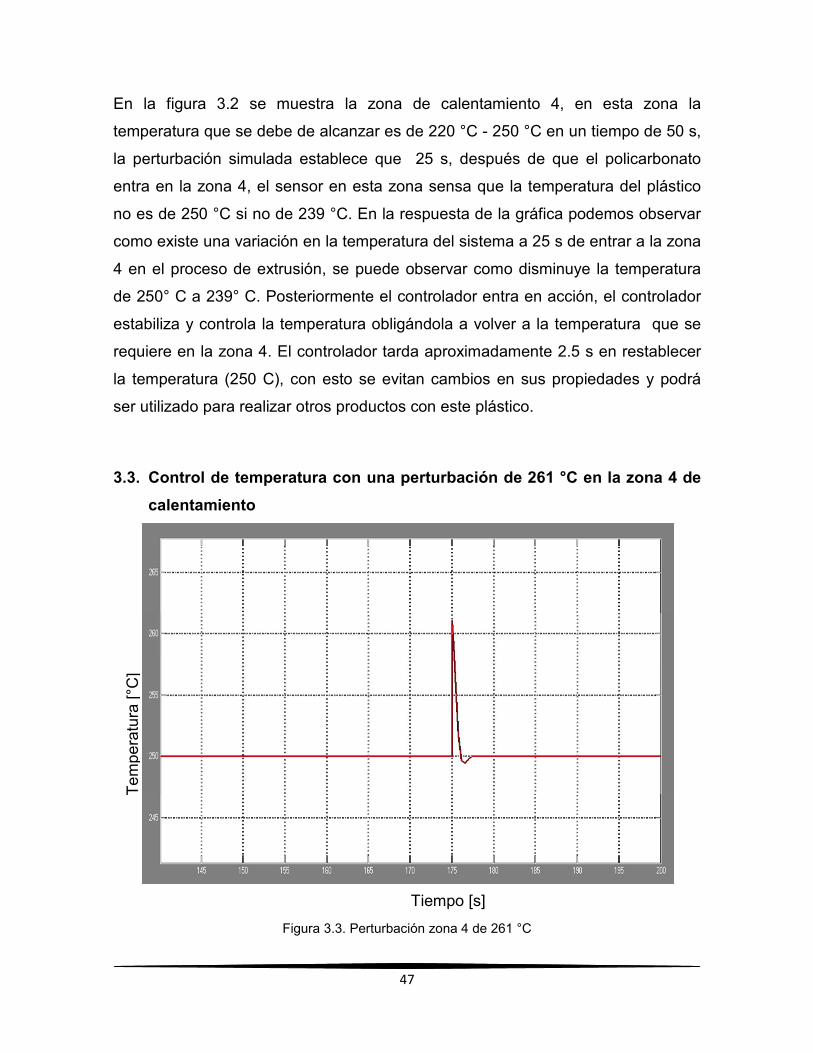
En la figura 3.2 se muestra la zona de calentamiento 4, en esta zona la
temperatura que se debe de alcanzar es de 220 °C - 250 °C en un tiempo de 50 s,
la perturbación simulada establece que 25 s, después de que el policarbonato
entra en la zona 4, el sensor en esta zona sensa que la temperatura del plástico
no es de 250 °C si no de 239 °C. En la respuesta de la gráfica podemos observar
como existe una variación en la temperatura del sistema a 25 s de entrar a la zona
4 en el proceso de extrusión, se puede observar como disminuye la temperatura
de 250° C a 239° C. Posteriormente el controlador entra en acción, el controlador
estabiliza y controla la temperatura obligándola a volver a la temperatura que se
requiere en la zona 4. El controlador tarda aproximadamente 2.5 s en restablecer
la temperatura (250 C), con esto se evitan cambios en sus propiedades y podrá
ser utilizado para realizar otros productos con este plástico.
3.3. Control de temperatura con una perturbación de 261 °C en la zona 4 de
calentamiento
Figura 3.3. Perturbación zona 4 de 261 °C
Temperatura [°C
]
Tiempo [s]

48
En la figura 3.3 se muestra la zona de calentamiento 4, en esta zona la
temperatura que se debe alcanzar es de 220 °C - 250 °C en un tiempo de 50 s, la
perturbación simulada establece que a 25 s después de haber entrado a la zona 4,
el sensor posicionado en la zona 4 mide una temperatura del plásticos de 261 °C,
está temperatura esta fuera del intervalo requerido del plástico (240 – 250 °C). La
respuesta del controlador en el instante que detecta el cambio de temperatura
realiza la estabilización en un tiempo de 2 s con un sobreimpulsó mínimo
aproximadamente de 0.5 °C.
En la respuesta de la gráfica podemos observar como existe una variación en la
temperatura del sistema a 25 s de entrar a la zona 4 en el proceso de extrusión, se
puede observar como aumenta la temperatura de 250° C a 261° C. Posteriormente
el controlador entra en acción, el controlador estabiliza y controla la temperatura
obligándola a volver a la temperatura que se requiere en la zona 4. El controlador
tarda aproximadamente 2.5 s en restablecer la temperatura (250 C), con esto se
evitan cambios en sus propiedades y podrá ser utilizado para realizar otros
productos con este plástico.
Las zonas donde se muestran simuladas las perturbaciones anteriores se
seleccionaron en base a que estas zonas son las de mayor importancia dentro del
extrusor. La zona 1 es en donde entra el plástico y pueden existir cambios de
temperatura ocasionados por el medio ambiente o por las etapas anteriores del
proceso estudiado la zona 4 donde el plástico necesita que la temperatura sea lo
más estable posible.
Con base a las respuestas obtenidas con el control PID propuesto para la etapa
de extrusión, se observa que las perturbaciones que llegará a tener la máquina
extrusora en cambios de temperatura serán corregidas por el controlador PID. Se
observa que el tiempo de respuesta a las perturbaciones que se pudieran generar
en esta etapa son subsanadas por el controlador impidiendo cambios de
temperatura dentro de las zonas de calentamiento.
49
3.4. Cálculo económico
En proyectos donde se realizan simulaciones para observar el comportamiento de
los sistemas, se realiza un análisis económico en donde el trabajo de ingeniería
(horas hombre) y la mano de obra es indispensable para proyectos en donde la
simulación es necesaria para conocer el comportamiento del sistema.
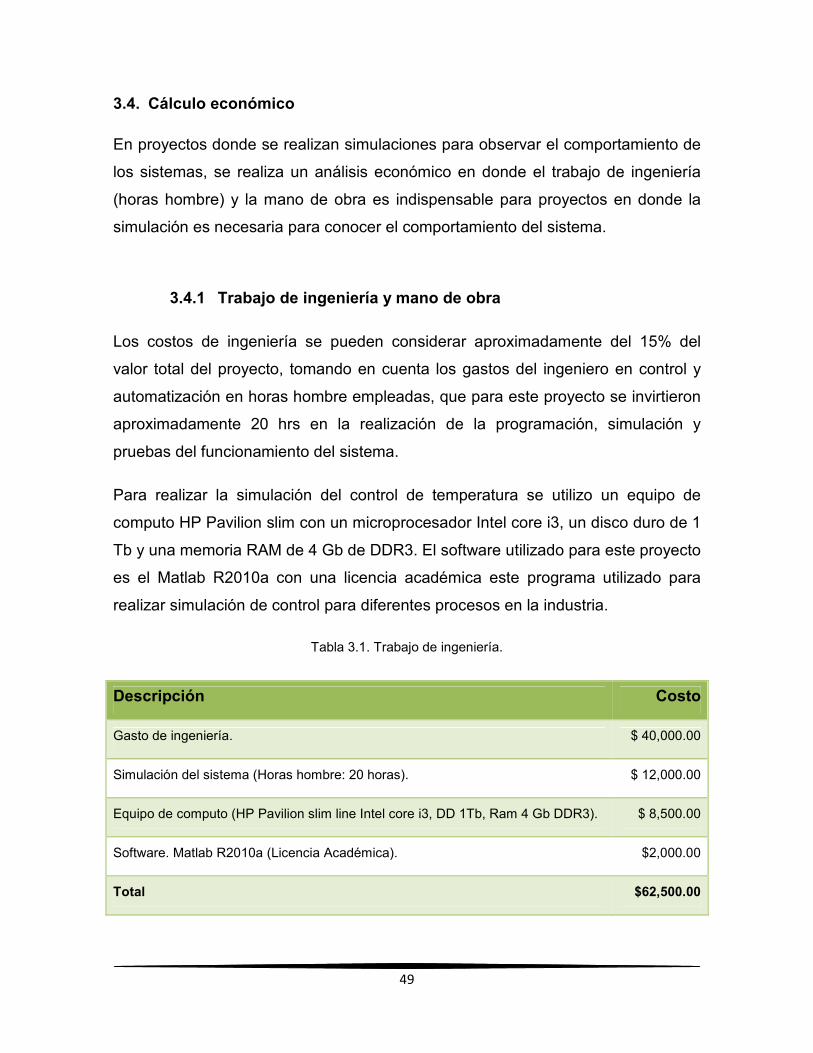
3.4.1 Trabajo de ingeniería y mano de obra
Los costos de ingeniería se pueden considerar aproximadamente del 15% del
valor total del proyecto, tomando en cuenta los gastos del ingeniero en control y
automatización en horas hombre empleadas, que para este proyecto se invirtieron
aproximadamente 20 hrs en la realización de la programación, simulación y
pruebas del funcionamiento del sistema.
Para realizar la simulación del control de temperatura se utilizo un equipo de
computo HP Pavilion slim con un microprocesador Intel core i3, un disco duro de 1
Tb y una memoria RAM de 4 Gb de DDR3. El software utilizado para este proyecto
es el Matlab R2010a con una licencia académica este programa utilizado para
realizar simulación de control para diferentes procesos en la industria.
Tabla 3.1. Trabajo de ingeniería.
Descripción Costo
Gasto de ingeniería. $ 40,000.00
Simulación del sistema (Horas hombre: 20 horas). $ 12,000.00
Equipo de computo (HP Pavilion slim line Intel core i3, DD 1Tb, Ram 4 Gb DDR3). $ 8,500.00
Software. Matlab R2010a (Licencia Académica). $2,000.00
Total $62,500.00

50
Conclusiones
En el presente trabajo de investigación en el cual se compartió la idea del reciclaje
de desechos sólidos con la finalidad de aminorar la posible contaminación que se
produzca y dañe el medio ambiente, cuando estos saturen el medio sin que
puedan ser reutilizables por la falta de medios tangibles que posibiliten la
recolección, reciclaje y reutilización de dichos desechos, que los alejen de quedar
inertes en el medio ambiente produciendo un daño ecológico permanente,
principalmente por el tiempo de descomposición que estos desechos necesitan
para ser integrados nuevamente de la naturaleza. En la investigación se atendió
un punto importante para poder atacar un segmentó de los desechos sólidos que
son arrojados al medio ambiente y que están comprendidos dentro de desechos
inorgánicos (basura inorgánica), que comprende a los del orden de plástico, vidrio,
metales, papel y textiles; atacando directamente al problema que representan las
ordenes de los plásticos, se puedo analizar como se recolectan, reciclan y se
reutilizan los Policarbonatos (PC) que se convierte en grandes contaminantes al
no ser reutilizados, y que principalmente se encuentran en la elaboración de los
discos compactos.
Dentro del proceso de reciclaje de los Policarbonatos (PC); en su proceso mismo
se atendió principalmente la etapa de extrusión en la cual a través de un estudio
de ingeniería, se realizó el control de temperatura de una máquina extrusora que
se utiliza para reciclar el policarbonato (PC) que sirve para la elaboración de
discos compactos. Para tener un control óptimo en la temperatura de la máquina
extrusora se propuso utilizar un controlador PID, el cual controlará
automáticamente la temperatura interna de dicha máquina en la etapa de
extrusión en el proceso de reciclaje.
Este dispositivo evita variaciones extremas en la temperatura al momento de
procesar el Policarbonato (PC) y de esta forma aumentar la cantidad de plástico
reciclado y ser reutilizado en la elaboración de diferentes productos que lo utilicen
como materia prima.

51
Dentro del estudio se realizaron diferentes simulaciones del sistema, en donde se
simularon diferentes casos en que la temperatura tendría una variación fuera de
los intervalos de comodidad de temperatura en el proceso del plástico, así se pudo
observar que en los datos registrados en las graficas obtenidas de las
simulaciones realizadas el controlador propuesto realizara su función de controlar
y estabilizar el sistema cuando existan aumentos o disminuciones de la
temperatura dentro de las zonas de calentamiento.
Por lo tanto concluimos que al realizar simulaciones del control de temperatura en
la etapa de extrusión nos dio como resultado que seleccionar la opción de un
controlador PID para el control de temperatura es viable ya que deja funcionar la
máquina de extrusión dentro de los parámetros de temperatura óptimos para la
fundición del plástico sin que este se dañe para ser reutilizado; controla la
temperatura que es requerida en cada una de las zonas de calentamiento del
extrusor, cumple con las condiciones y requerimientos necesarios para que se
pueda implementar un controlador de estas características en una máquina
extrusora. De esta forma se demostró que el utilizar este método de control (PID),
maximiza la eficiencia en su función en el proceso en este tipo de máquina,
evitando daños en su funcionamiento y logrando un mayor reciclado producción de
Policarbonato (PC) reciclado.
Con este proyecto de investigación se pretendió contribuir para aminorar la
contaminación del medio ambiente, en el reciclaje de unos de los elementos
contaminantes que se desechan, como lo son los plásticos de policarbonato (PC)
de impacto mundial gracias al avance tecnológico pero que la concientización de
ayuda a no contaminar el medio ambiente, al ahorro de reutilizar materiales que
pueden ser reciclables y al interés de empresas que ven en el reciclaje la
obtención de materia prima para la elaboración de nuevos productos; se tiene la
aportación de la ingeniería en desarrollar técnicas más avanzadas de
funcionamiento en la producción.

52
Bibliografía
1. Katsuhiko Ogata. Ingeniería de Control Moderna. Pearson Educación S.A,
2003, 188-191.
2. Antonio Creus Sole. Instrumentación industrial 4ª edición. Alfaomega, 1992,
245-284
3. Gabriela Chávez Hidalgo y Jacinto Elías Cedeño Díaz. Memorias de II
Coloquio Institucional de Comités Ambientales. Instituto Politécnico
Nacional. Marzo 2011, 87-88, 92-93.
4. Karl J. Astrom, Tore Hagglund. Control PIN Avanzado, Pearson Educación
S.A , 2009, 91
5. Gaceta Politécnica, número 861, 24 de Mayo de 2011, Año XLVII VOL.13,
ISSN 0061-3848
6. Teresa Valverde Valdés, Jorge A. Meave del Castillo, Julia Carabias Lillo.
Ecología y medio ambiente 1�� edición. Pearson Educación. Páginas 175 -
176, 179 – 192.
7. http://www.cederika.com/ Mayo 2011
8. http://reciclaelectronicos.com/ Abril 2011
9. http://aplicaciones.semarnat.gob.mx/estadisticas/compendio2010/10.100.13
.5_8080/ibi_apps/WFServletb83e.html Mayo 2011
10. http://www.eis.uva.es/~macromol/curso03-
04/PC/Problemas_medioambientales.htm Mayo 2011 Abril 2011
53
11. http://es.wikipedia.org/wiki/Policarbonato Abril 2011
12. http://www.terra.org/articulos/art01138.html Abril 2011
13. http://es.wikipedia.org/wiki/Proporcional_integral_derivativo Mayo 2011
14. http://www.sagan-gea.org/hojaredsuelo/paginas/6hoja.html Junio 2011
15. http://elblogverde.com/como-reciclar/ Junio 2011
16. http://www.angelfire.com/electronic/jagp/sem7/pidcont1.html Julio 2011
17. http://www.plasticos-novamex.com/compra-
plastico/index.php?gclid=CJL88uyg5asCFYldTAodW1q9Hw Septiembre
2001
18. http://www.comercioindustrial.net/productos.php?id=acr1&mt=acrilico
Septiembre 2011
19. http://www.fida.es:8001/fida/VisNot?id=1d2df77afc73f85f51b7654a91a4363
Septiembre 2011