SIMATIC PID Temperature Control -...
102
s Prólogo, Índice Introducción 1 Regulador de temperatura continuo FB 58 "TCONT_CP" 2 Optimización del regulador en el FB 58 "TCONT_CP" 3 Regulador de temperatura discontinuo FB 59 "TCONT_S" 4 Guía rápida (Getting Started) 5 Reguladores de temperatura: ejemplos 6 Anexo A Índice de abreviaturas B Índice alfabético SIMATIC PID Temperature Control Manual Edición 12/2003 A5E00125041-02
Transcript of SIMATIC PID Temperature Control -...

s Prólogo, Índice
Introducción 1 Regulador de temperatura continuo FB 58 "TCONT_CP"
2
Optimización del regulador en el FB 58 "TCONT_CP" 3 Regulador de temperatura discontinuo FB 59 "TCONT_S"
4
Guía rápida (Getting Started) 5 Reguladores de temperatura: ejemplos 6 Anexo A Índice de abreviaturas B Índice alfabético
SIMATIC
PID Temperature Control Manual
Edición 12/2003 A5E00125041-02

Copyright © Siemens AG 2001-2003 All rights reserved La divulgación y reproducción de este documento, así como el uso y la comunicación de su contenido, no están autorizados, a no ser que se obtenga el consentimiento expreso para ello. Los infractores quedan obligados a la indemnización de los daños. Se reservan todos los derechos, en particular para el caso de concesión de patentes o de modelos de utilidad. Siemens AG Bereich Automation and Drives Geschaeftsgebiet Industrial Automation Systems Postfach 4848, D- 90327 Nuernberg
Exención de responsabilidad Hemos probado el contenido de esta publicación con la concordancia descrita para el hardware y el software. Sin embargo, es posible que se den algunas desviaciones que nos impiden tomar garantía completa de esta concordancia. El contenido de esta publicación está sometido a revisiones regularmente y en caso necesario se incluyen las correcciones en la siguiente edición. Agradecemos sugerencias. © Siemens AG 2001-2003 Sujeto a cambios sin previo aviso.
Siemens Aktiengesellschaft A5E00125041-01
Consignas de seguridad para el usuario
Este manual contiene las informaciones necesarias para la seguridad personal así como para la prevención de daños materiales. Las informaciones están puestas de relieve mediante señales de precaución. Las señales que figuran a continuación representan distintos grados de peligro:
! Peligro Significa que, si no se adoptan las medidas preventivas adecuadas, se producirá la muerte, o bien lesiones corporales graves o daños materiales considerables.
! Advertencia Significa que, si no se adoptan las medidas preventivas adecuadas, puede producirse la muerte, lesiones corporales graves o daños materiales considerables.
! Precaución Significa que, si no se adoptan las medidas preventivas adecuadas, pueden producirse lesiones corporales.
Precaución Significa que, si no se adoptan las medidas preventivas adecuadas, pueden producirse daños materiales.
Atención Se trata de una información importante, sobre el producto o sobre una parte determinada del manual, sobre la que se desea llamar particularmente la atención.
Personal cualificado
Sólo está autorizado a intervenir en este equipo el personal cualificado. En el sentido del manual se trata de personas que disponen de los conocimientos técnicos necesarios para poner en funcionamiento, conectar a tierra y marcar los aparatos, sistemas y circuitos de acuerdo con las normas estándar de seguridad.
Uso conforme
Considere lo siguiente:
! Advertencia El equipo o los componentes del sistema sólo se podrán utilizar para los casos de aplicación previstos en el catálogo y en la descripción técnica, y sólo con los equipos y componentes de proveniencia tercera recomendados y homologados por Siemens.
El funcionamiento correcto y seguro del producto presupone un transporte, un almacenamiento, una instalación y un montaje conforme a las prácticas de la buena ingeniería, así como un manejo y un mantenimiento rigurosos.
Marcas registradas
SIMATIC®, SIMATIC NET® y SIMATIC HMI® son marcas registradas por SIEMENS AG.
Los restantes nombres y designaciones contenidos en el presente documento pueden ser marcas
registradas cuya utilización por terceros para sus propios fines puede violar los derechos de los
proprietarios.

PID Temperature Control A5E00125041-02 iii
Prólogo
Objetivo del manual
Este manual le servirá de ayuda cuando trabaje con los bloques de regulación de temperatura de la librería Standard Library > PID Control. Asimismo, le permitirá familiarizarse con el funcionamiento de los bloques de regulación, particularmente la optimización del regulador, así como con la llamada del entorno de parametrización para los bloques. Existen ayudas en pantalla para los bloques y para el entorno de parametrización que le resultarán muy útiles al parametrizar los bloques.
Este manual está dirigido a personas que posean la cualificación necesaria y que se dediquen a la programación, la configuración, la puesta en funcionamiento y el mantenimiento de sistemas de automatización.
Le recomendamos que se familiarice primero con los ejemplos del capítulo 6 "Reguladores de temperatura: ejemplos". Estos ejemplos ofrecen una sencilla introducción al uso de los reguladores de temperatura.
Conocimientos básicos necesarios
Para comprender el manual se requieren conocimientos generales en el campo de la técnica de la automatización y de la regulación.
Además, se presuponen conocimientos acerca del uso de ordenadores o medios de trabajo similares a un PC (p. ejemplo, unidades de programación) en el sistema operativo Windows 95/98/NT/2000 o Me. Puesto que PID Temperature Control se ejecuta con el software estándar STEP 7, también se requieren conocimientos sobre el manejo de dicho software, los cuales se recogen en el manual "Programar con STEP 7 V5.1".
Ámbito de validez del manual
Este manual es válido para el regulador de temperatura de la librería Standard Library > PID Control del software de programación STEP 7 a partir de la versión V5.1 ServicePack 3.

Prólogo
PID Temperature Control iv A5E00125041-02
Clasificación en el conjunto de la documentación
Este manual forma parte del paquete de documentación "STEP 7 Información básica“.
Manuales Objetivo Número de referencia
Información básica de STEP 7 compuesta por:
• STEP 7 V5.1: Introducción y ejercicios prácticos
• Programar con STEP 7 V5.1
• Configurar el hardware y la comunicación con STEP 7 V5.1
• De S5 a S7, Guía para facilitar la transición
Nociones básicas para el personal técnico que describen el procedimiento para realizar tareas de control con STEP 7 y S7-300/400.
6ES7810-4CA05-8DA0
Información de referencia para STEP 7, compuesta por
• Manuales KOP/FUP/AWL para S7-300/400
• Funciones estándar y funciones de sistema para S7-300/400
Esta obra de consulta describe los lenguajes de programación KOP, FUP y AWL, así como las funciones estándar y las funciones de sistema como complemento a la "Información básica de STEP 7".
6ES7810-4CA05-8DR0
Manual electrónico
• PID Temperature Control
El manual describe los reguladores de temperatura de la librería Standard Library > PID Control.
Componente del paquete de software STEP 7.
Ayudas en pantalla Objetivo Número de referencia
Ayuda de STEP 7 Nociones básicas para la programación y la configuración del hardware con STEP 7 en forma de ayuda en pantalla.
Componente del paquete de software STEP 7.
Ayudas de referencia sobre
• AWL/KOP/FUP
• SFBs/SFCs
• bloques de organización
• PID Temperature Control
Información de referencia sensible al contexto
Componente del paquete de software STEP 7.
Otros productos de regulación en SIMATIC S7
• Manuales de usuario de SIMATIC S7: Standard PID Control, Modular PID Control, PID Self-Tuner, FM355/455 PID Control (en inglés)
• Jürgen Müller, "Regeln mit SIMATIC - Praxisbuch für Regelungen mit SIMATIC S7 und PCS7" (en alemán) publicado en MCI Publicis Verlag ISBN 3-89578-147-9

Prólogo
PID Temperature Control A5E00125041-02 v
Asistencia adicional
Si tiene preguntas relacionadas con el uso de los productos descritos en el manual a las que no encuentre respuesta, diríjase a la sucursal o al representante más próximo de Siemens, en donde le pondrán en contacto con el especialista.
Encontrará a su persona de contacto en la página de Internet:
http://www.siemens.com/automation/partner
Centro de formación SIMATIC Para ofrecer a nuestros clientes un fácil aprendizaje de los sistemas de automatización SIMATIC S7, les ofrecemos distintos cursillos de formación. Diríjase a su centro de formación regional o a la central en D 90327 Nuernberg.
Teléfono: +49 (911) 895-3200.
Internet: http://www.sitrain.com
Documentación SIMATIC en Internet
Podrá encontrar la documentación de manera gratuita en la siguiente dirección de Internet:
http://www.ad.siemens.de/support
Utilice el Knowledge Manager disponible para encontrar con mayor rapidez la información que necesite. Para preguntas o sugerencias acerca de la documentación puede consultar en el foro de Internet la conferencia titulada "Documentación".
Prólogo
PID Temperature Control vi A5E00125041-02
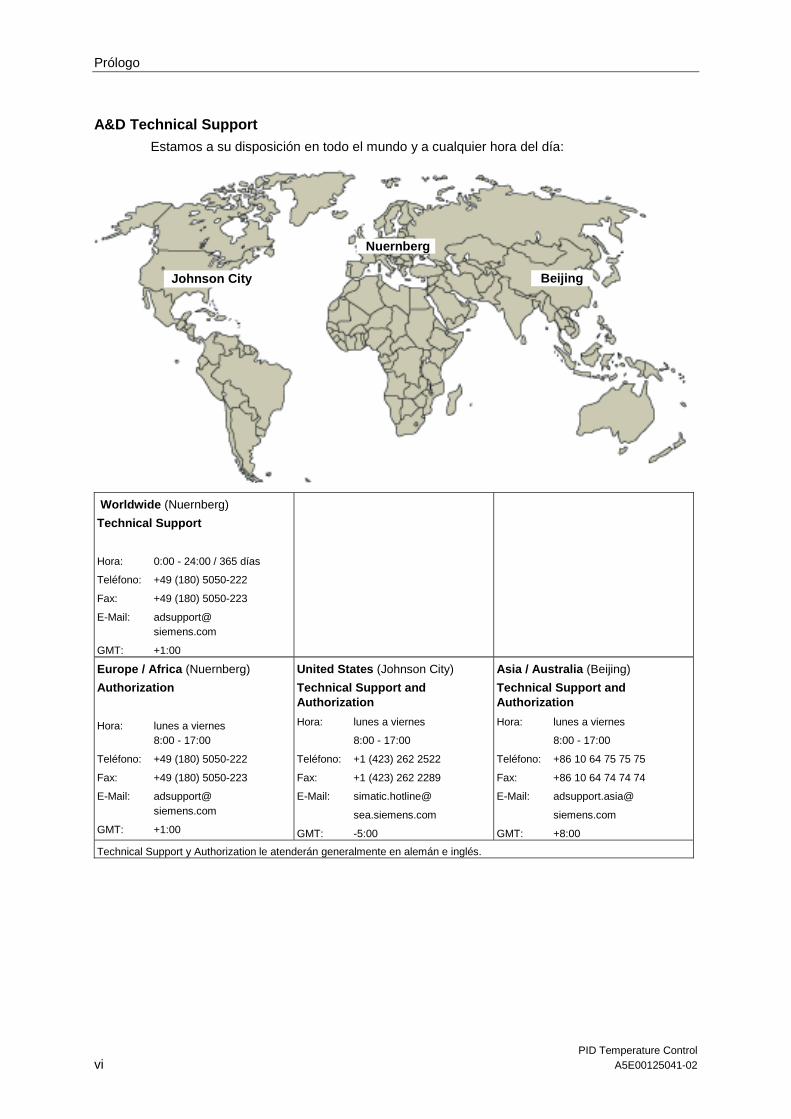
A&D Technical Support Estamos a su disposición en todo el mundo y a cualquier hora del día:
Beijing
Nuernberg
Johnson City
Worldwide (Nuernberg)
Technical Support
Hora: 0:00 - 24:00 / 365 días
Teléfono: +49 (180) 5050-222
Fax: +49 (180) 5050-223
E-Mail: adsupport@ siemens.com
GMT: +1:00
Europe / Africa (Nuernberg)
Authorization
Hora: lunes a viernes 8:00 - 17:00
Teléfono: +49 (180) 5050-222
Fax: +49 (180) 5050-223
E-Mail: adsupport@ siemens.com
GMT: +1:00
United States (Johnson City)
Technical Support and Authorization
Hora: lunes a viernes
8:00 - 17:00
Teléfono: +1 (423) 262 2522
Fax: +1 (423) 262 2289
E-Mail: simatic.hotline@
sea.siemens.com
GMT: -5:00
Asia / Australia (Beijing)
Technical Support and Authorization
Hora: lunes a viernes
8:00 - 17:00
Teléfono: +86 10 64 75 75 75
Fax: +86 10 64 74 74 74
E-Mail: adsupport.asia@
siemens.com
GMT: +8:00
Technical Support y Authorization le atenderán generalmente en alemán e inglés.

Prólogo
PID Temperature Control A5E00125041-02 vii
Service & Support en Internet Además de nuestra documentación, en Internet le ponemos a su disposición todo nuestro know-how.
http://www.siemens.com/automation/service&support
En esta página encontrará:
• "Newsletter" que le mantendrán siempre al día ofreciéndole informaciones de última hora,
• La rúbrica "Servicios online" con un buscador que le permitirá acceder a la información que necesita,
• El "Foro" en el que podrá intercambiar sus experiencias con cientos de expertos en todo el mundo,
• El especialista o experto de Automation & Drives de su región,
• Bajo la rúbrica "Servicios" encontrará información sobre el servicio técnico más próximo, sobre reparaciones, repuestos etc.

Prólogo
PID Temperature Control viii A5E00125041-02

PID Temperature Control A5E00125041-02 ix
Índice
1 Introducción 1-1
1.1 FB 58 "TCONT_CP"..........................................................................................1-3 1.2 FB 59 "TCONT_S" ............................................................................................1-4
2 Regulador de temperatura continuo FB 58 "TCONT_CP" 2-1
2.1 Acción reguladora .............................................................................................2-1 2.1.1 Formación del error de regulación ................................................................... 2-1 2.1.2 Algoritmo PID ................................................................................................... 2-4 2.1.3 Cálculo del valor manipulado ........................................................................... 2-6 2.1.4 Guardar y recargar los parámetros del regulador ............................................ 2-9 2.2 Generador de impulsos PULSEGEN (PULSE_ON) .......................................2-11 2.3 Diagrama de bloques ......................................................................................2-13 2.4 Integración en el programa de usuario ...........................................................2-14 2.4.1 Llamada del bloque de regulación ................................................................. 2-14 2.4.2 Llamada sin generador de impulsos (regulador continuo)............................. 2-15 2.4.3 Llamada con generador de impulsos (regulador de impulsos) ...................... 2-15 2.4.4 Inicialización ................................................................................................... 2-18
3 Optimización del regulador en el FB 58 "TCONT_CP" 3-1
3.1 Introducción.......................................................................................................3-1 3.2 Tipos de procesos .............................................................................................3-2 3.3 Ámbito de aplicación .........................................................................................3-3 3.4 Ciclo completo de la optimización del regulador...............................................3-4 3.5 Preparativos ......................................................................................................3-6 3.6 Inicio de la optimización (fase 1 -> 2)................................................................3-8 3.7 Búsqueda del punto de inversión (fase 2)
y cálculo de los parámetros del regulador (fase 3, 4, 5) .................................3-10 3.8 Comprobación del tipo de procesos (fase 7) ..................................................3-11 3.9 Resultado de la optimización ..........................................................................3-11 3.10 Interrupción de la optimización por parte del usuario .....................................3-12 3.11 Imágenes de error y solución de errores ........................................................3-12 3.12 Post-optimización manual en modo Regulación .............................................3-16 3.13 Optimización paralela de los canales del regulador .......................................3-19
4 Regulador de temperatura discontinuo FB 59 "TCONT_S" 4-1
4.1 Acción reguladora .............................................................................................4-1 4.1.1 Formación del error de regulación ................................................................... 4-1 4.1.2 Algoritmo del regulador discontinuo PI ............................................................ 4-4 4.2 Diagrama de bloques ........................................................................................4-5 4.3 Integración en el programa de usuario .............................................................4-6 4.3.1 Llamada del bloque de regulación ................................................................... 4-6 4.3.2 Tiempo de muestreo del regulador .................................................................. 4-7 4.3.3 Inicialización ..................................................................................................... 4-7
5 Guía rápida (Getting Started) 5-1

Índice
PID Temperature Control x A5E00125041-02
6 Reguladores de temperatura: ejemplos 6-1
6.1 Introducción.......................................................................................................6-1 6.2 FB 58 "TCONT_CP": ejemplo (regulación de impulsos)...................................6-2 6.3 Ejemplos del FB 58 "TCONT_CP" con base de tiempo corta ..........................6-6 6.4 FB 58 "TCONT_CP" (continuo): ejemplo ..........................................................6-7 6.5 Ejemplo con FB 59 "TCONT_S" (regulación discontinua) ..............................6-11
A Anexo A-1
A.1 Datos técnicos.................................................................................................. A-1 A.2 Tiempos de ejecución ...................................................................................... A-1 A.3 Ocupación de DB ............................................................................................. A-2 A.3.1 DB de instancia para el FB 58 "TCONT_CP" .................................................. A-2 A.3.2 DB de instancia para el FB 59 "TCONT_S" ................................................... A-14 A.4 Lista de respuestas de optimización .............................................................. A-18
B Índice de abreviaturas B-1
Índice alfabético

PID Temperature Control A5E00125041-02 1-1
1 Introducción
Clasificación en la gama de productos "PID Temperature Control"
PID Temperature ControlS7-300/400
Entorno de parametrización
Bloques de funciónFB58 "TCONT_CP" FB59 "TCONT_S"
Manual electrónico
Ejemplos
Ayuda online
Las diversas partes de STEP 7 PID Temperature Control quedan distribuidas en los siguientes directorios tras la instalación de STEP 7:
• SIEMENS\STEP7\S7LIBS\: FBs
• SIEMENS\STEP7\S7WRT\: Entorno de parametrización, archivo Léame, ayuda en pantalla
• SIEMENS\STEP7\EXAMPLES\: Ejemplos del programa
• SIEMENS\STEP7\MANUAL\: Manual

Introducción
PID Temperature Control 1-2 A5E00125041-02
Bloques de función
La librería "Standard Library PID Control" contiene dos reguladores de temperatura:
1. FB 58 "TCONT_CP": Regulador de temperatura para actuadores con señal de entrada continua o en forma de impulso. Este bloque de regulación contiene también una función de optimización automática para los parámetros PI/PID.
2. FB 59 "TCONT_S": Regulador discontinuo de temperatura para actuadores de acción integral, como p. ej. un servomotor.
En el caso de los bloques de regulación, se trata de una simple regulación de software en la que el bloque contiene todas las funciones del regulador. Los datos necesarios para el cálculo cíclico residen en los bloques de datos de instancia asignados.
Entorno de parametrización
El regulador se parametriza y se optimiza a través del entorno de parametrización. Los parámetros ajustados se depositan en el DB de instancia correspondiente. El entorno de parametrización se llama haciendo doble clic en el bloque de datos de instancia correspondiente.
Ayuda en pantalla
El entorno de parametrización y los bloques de función se describen en la ayuda en pantalla correspondiente.
Lectura del archivo Léame
En caso necesario, podrá encontrar información actual importante sobre el software suministrado en un archivo Léame. Este archivo se encuentra en la ventana de acceso del Administrador SIMATIC.

Introducción
PID Temperature Control A5E00125041-02 1-3
1.1 FB 58 "TCONT_CP"
El FB 58 "TCONT_CP" sirve para regular procesos de temperatura con control continuo o en forma de impulso. Mediante parametrización se pueden activar o desactivar funciones parciales del regulador PID para adaptarlo al proceso de regulación. Para ello basta utilizar la herramienta de parametrización. La llamada se realiza desde el proyecto haciendo doble clic en el DB de instancia en el Administrador SIMATIC. Encontrará el manual electrónico en: Inicio > Simatic > Documentación > Español > PID Temperature Control.
Aplicación
El funcionamiento se basa en el algoritmo de regulación PID, que está dotado de funciones adicionales para procesos de temperatura. Suministra valores manipulados analógicos y señales manipuladas con modulación de ancho de pulso. A cada regulador le corresponde un solo actuador, es decir, con un solo regulador se podrá o bien calentar o bien enfriar.
Uso del regulador en un proceso de refrigeración y de calefacción
El FB TCONT_CP se puede utilizar tanto para procesos de pura calefacción como para procesos de pura refrigeración. Si se va a utilizar para un proceso de refrigeración, habrá que parametrizar GAIN con un valor negativo. La inversión así parametrizada provoca que, p. ej., que al aumentar la temperatura, también aumente la magnitud manipulada LMN y, por tanto, la capacidad de refrigeración.
Esbozo de la estructura
Regulador de temperatura PID
• Zona de regulaciónFormador de
impulso
Valor manipuladoLMN
ConsignaSP_INT
Señal manipuladaQPULSE
Valor realPV_PERPV_IN
Optimización del regulador• Parámetros PI/PID
Ancho de la zona de regulaciónTiempo de muestreo
Comportamiento dereferencia optimizado-

Introducción
PID Temperature Control 1-4 A5E00125041-02
Descripción
Junto a las funciones de las ramas del valor real y del valor de consigna, el FB realiza un regulador de temperatura PID acabado con salida continua y binaria de la magnitud manipulada. Para mejorar el comportamiento de regulación en procesos de temperatura, el bloque dispone de una zona de regulación y de una reducción de la acción P en caso de que haya escalones en el valor de consigna. Los parámetros PI/PID pueden ser graduados por el propio bloque mediante optimización del regulador.
1.2 FB 59 "TCONT_S"
El FB 59 "TCONT_S" sirve para regular procesos técnicos de temperatura con señales de salida binarias del valor manipulado para actuadores de acción I en los sistemas de automatización SIMATIC S7. Mediante parametrización es posible activar o desactivar funciones parciales del regulador discontinuo PI para adaptarlo al proceso regulado. Esto se puede realizar en el entorno de parametrización. La llamada se realiza desde el proyecto haciendo doble clic en el DB de instancia en el Administrador SIMATIC. Encontrará el manual electrónico en: Inicio > Simatic > Documentación > Español > Regulación de temperatura PID.
Aplicación
El funcionamiento se basa en el algoritmo de regulación PI del regulador de muestreo. Éste se completa con los elementos funcionales que generan la señal de salida binaria a partir de la señal manipulada analógica.
El regulador también se puede utilizar en una cascada de reguladores como posicionador subordinado. La entrada del valor de consigna SP_INT preselecciona la posición del actuador. En este caso, tanto la entrada de valor real como el parámetro TI tienen que estar a 0 (tiempo de acción integral). Un ejemplo de aplicación sería una regulación de la temperatura con regulación de la potencia calorífica a través de un control pulso/pausa y con regulación de la potencia frigorífica a través de una válvula de mariposa. Para cerrar completamente la válvula, la magnitud manipulada debe pasar a ser negativa (ER*GAIN).
Descripción
Junto a las funciones de la rama de valor real, el FB 59 "TCONT_S" realiza un regulador PI terminado con salida binaria de valor manipulado y posibilidades de influir manualmente sobre el valor manipulado. El regulador opera sin realimentación de posición.
PID Temperature Control A5E00125041-02 2-1
2 Regulador de temperatura continuo FB 58 "TCONT_CP"
2.1 Acción reguladora
2.1.1 Formación del error de regulación
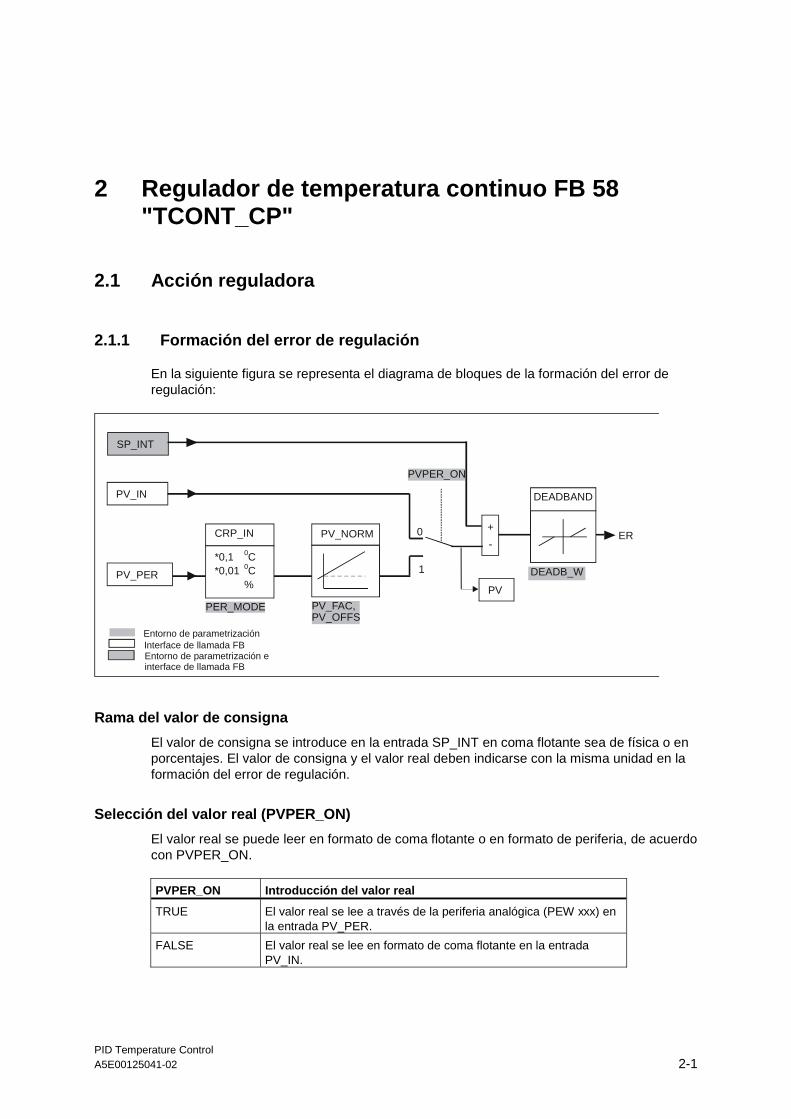
En la siguiente figura se representa el diagrama de bloques de la formación del error de regulación:
SP_INT
PV_IN
PV_PER
CRP_IN
PER_MODE
PV_NORM
PV_FAC,PV_OFFS
*0,1 0C*0,01 0C %
1
0
PVPER_ON
PV
DEADBAND
DEADB_W
ER+
Entorno de parametrización
Entorno de parametrización einterface de llamada FB
Interface de llamada FB
Rama del valor de consigna
El valor de consigna se introduce en la entrada SP_INT en coma flotante sea de física o en porcentajes. El valor de consigna y el valor real deben indicarse con la misma unidad en la formación del error de regulación.
Selección del valor real (PVPER_ON)
El valor real se puede leer en formato de coma flotante o en formato de periferia, de acuerdo con PVPER_ON.
PVPER_ON Introducción del valor real
TRUE El valor real se lee a través de la periferia analógica (PEW xxx) en la entrada PV_PER.
FALSE El valor real se lee en formato de coma flotante en la entrada PV_IN.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-2 A5E00125041-02
Conversión del formato del valor real CRP_IN (PER_MODE)
La función CRP_IN convierte el valor de periferia PV_PER dependiendo del interruptor PER_MODE en un valor en coma flotante según la siguiente regla:
PER_MODE Salida de CRP_IN
Tipo de entrada analógica Unidad
0 PV_PER * 0.1 Termopares; PT100/NI100; Estándar °C; °F
1 PV_PER * 0.01 PT100/NI100; Climatización; °C; °F
2 PV_PER * 100/27648
Tensión/intensidad %
Normalización del valor real PV_NORM (PF_FAC, PV_OFFS)
La función PV_NORM calcula la salida de CRP_IN según la siguiente regla:
"Salida de PV_NORM" = "Salida de CPR_IN" * PV_FAC + PV_OFFS
Se puede utilizar para el siguiente propósito:
• Adaptación del valor real con PV_FAC como factor del valor real y PV_OFFS como offset del valor real
• Normalización de la temperatura en porcentajes Desea indicar el valor de consigna en porcentajes y ahora debe convertir el valor de temperatura medido en un valor porcentual.
• Normalización de los valores porcentuales a temperaturas Desea indicar el valor de consigna en la magnitud física Temperatura y ahora debe convertir el valor de tensión/intensidad medido en una temperatura.
Cálculo de los parámetros:
• PV_FAC = rango de PV_NORM / rango de CRP_IN;
• PV_OFFS = UG(PV_NORM) - PV_FAC * UG(CRP_IN); con UG: límite inferior
Con los valores predeterminados (PV_FAC = 1.0 y PV_OFFS = 0.0) se desactiva la normalización. El valor real que actúa verdaderamente se obtiene en la salida PV.
Nota
En la regulación de impulsos, el valor real se debe transferir al bloque en una llamada de impulso rápida (motivo: filtrado de valores medios). De lo contrario puede disminuir la calidad de la regulación.
Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-3
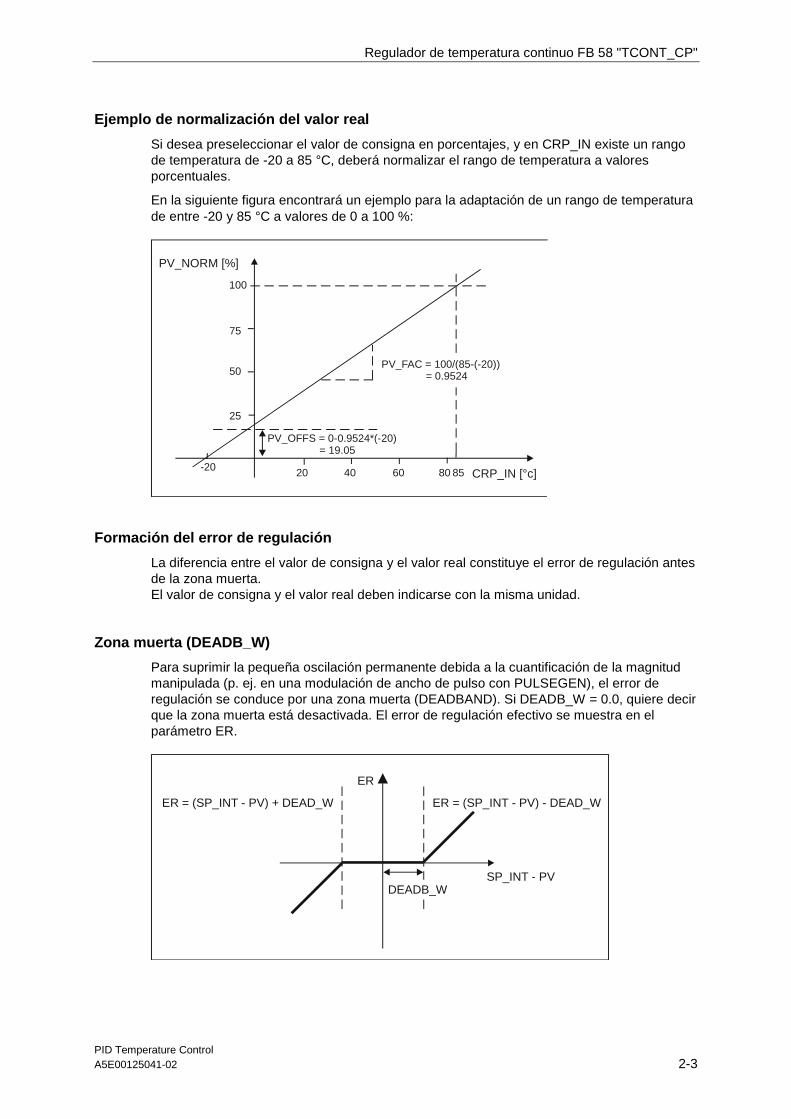
Ejemplo de normalización del valor real
Si desea preseleccionar el valor de consigna en porcentajes, y en CRP_IN existe un rango de temperatura de -20 a 85 °C, deberá normalizar el rango de temperatura a valores porcentuales.
En la siguiente figura encontrará un ejemplo para la adaptación de un rango de temperatura de entre -20 y 85 °C a valores de 0 a 100 %:
PV_NORM [%]
100
75
50
25
-20 20 40 60 80 85 [°c]CRP_IN
PV_OFFS = 0-0.9524*(-20)
PV_FAC = 100/(85-(-20)) = 0.9524
= 19.05
Formación del error de regulación
La diferencia entre el valor de consigna y el valor real constituye el error de regulación antes de la zona muerta. El valor de consigna y el valor real deben indicarse con la misma unidad.
Zona muerta (DEADB_W)
Para suprimir la pequeña oscilación permanente debida a la cuantificación de la magnitud manipulada (p. ej. en una modulación de ancho de pulso con PULSEGEN), el error de regulación se conduce por una zona muerta (DEADBAND). Si DEADB_W = 0.0, quiere decir que la zona muerta está desactivada. El error de regulación efectivo se muestra en el parámetro ER.
ER
SP_INT - PV
ER = (SP_INT - PV) - DEAD_WER = (SP_INT - PV) + DEAD_W
DEADB_W
Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-4 A5E00125041-02
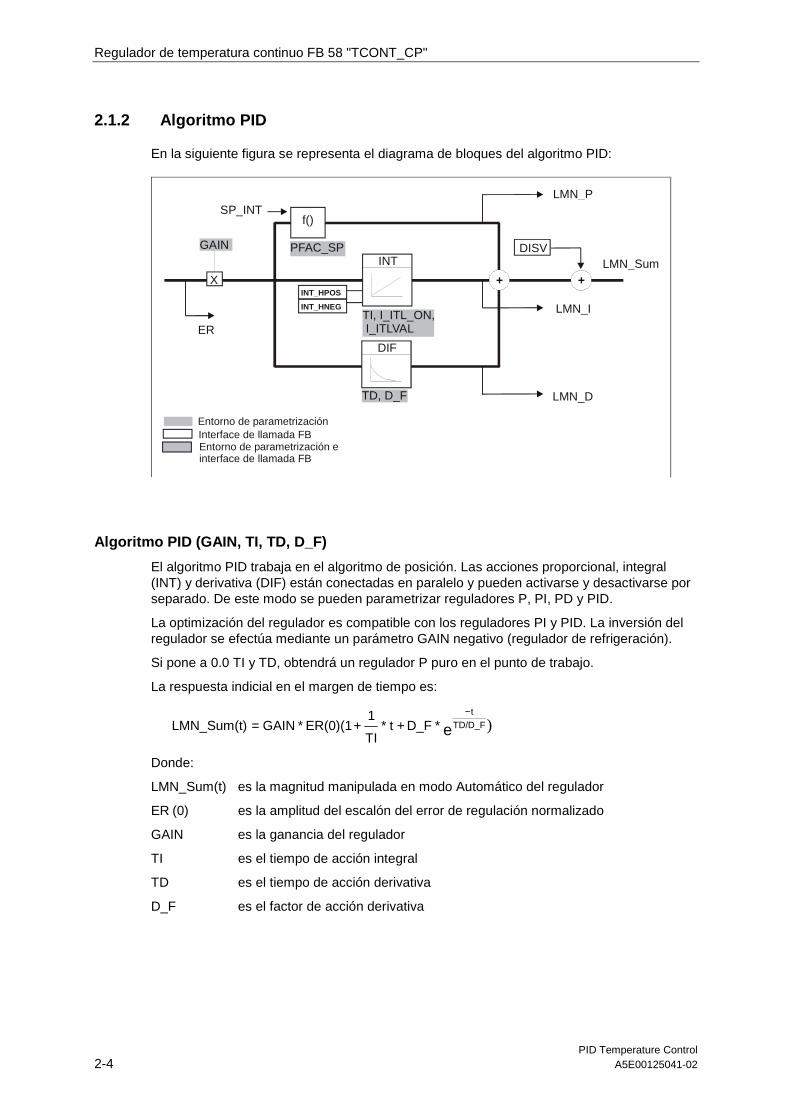
2.1.2 Algoritmo PID
En la siguiente figura se representa el diagrama de bloques del algoritmo PID:
X
ER
INT
DIF
+ +
LMN_P
LMN_I
LMN_D
SP_INTf()
LMN_Sum
GAIN PFAC_SP
TD, D_F
INT_HPOS
INT_HNEGTI, I_ITL_ON, I_ITLVAL
DISV
Entorno de parametrización
Entorno de parametrización einterface de llamada FB
Interface de llamada FB
Algoritmo PID (GAIN, TI, TD, D_F)
El algoritmo PID trabaja en el algoritmo de posición. Las acciones proporcional, integral (INT) y derivativa (DIF) están conectadas en paralelo y pueden activarse y desactivarse por separado. De este modo se pueden parametrizar reguladores P, PI, PD y PID.
La optimización del regulador es compatible con los reguladores PI y PID. La inversión del regulador se efectúa mediante un parámetro GAIN negativo (regulador de refrigeración).
Si pone a 0.0 TI y TD, obtendrá un regulador P puro en el punto de trabajo.
La respuesta indicial en el margen de tiempo es:
Donde:
LMN_Sum(t) es la magnitud manipulada en modo Automático del regulador
ER (0) es la amplitud del escalón del error de regulación normalizado
GAIN es la ganancia del regulador
TI es el tiempo de acción integral
TD es el tiempo de acción derivativa
D_F es el factor de acción derivativa
)eTD/D_Ft
*D_Ft*TI
1ER(0)(1*GAINLMN_Sum(t)
−
++=

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-5
ER (t)GAIN * ER (0)
GAIN * ER (0)
ER
LMN_Sum(t)
t
TD / D_F
LMN_Sum
TI
GAIN * D_F ER*
Integrador (TI, I_ITL_ON, I_ITLVAL)
En modo Manual, se corrige según: LMN_I = LMN - LMN_P - DISV.
Si se limita el valor manipulado, la acción I se detiene. En caso de un error de regulación que mueva la acción I en el sentido del margen de corrección interno, la acción I se habilitará de nuevo.
Con las siguientes medidas se producen más modificaciones de la acción I:
• Desconexión de la acción I del regulador con TI = 0.0.
• Atenuación de la acción P en caso de modificaciones del valor de consigna.
• Zona de regulación.
• Modificación online de los límites de valor manipulado.
Atenuación de la acción P en caso de modificaciones del valor de consigna (PFAC_SP)
Para evitar sobreoscilaciones, es posible atenuar la acción P a través del parámetro "Ganancia proporcional al cambiar el valor de consigna" (PFAC_SP). Mediante PFAC_SP puede elegir entre 0.0 y 1.0 con cuánta intensidad deberá actuar la acción P en caso de modificaciones del valor de consigna:
• PFAC_SP=1.0: la acción P actúa al cien por cien en caso de modificaciones del valor de consigna.
• PFAC_SP=0.0: la acción P no actúa en caso de modificaciones del valor de consigna.
La atenuación de la acción P se logra mediante una compensación en la acción I.
Diferenciador (TD, D_F)
• Desconexión de la acción D del regulador con TD = 0.0.
• Cuando la acción D está conectada, debe cumplirse la siguiente ecuación: TD ≥ 0.5 * CYCLE * D_F

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-6 A5E00125041-02
Parametrización de un regulador P o PD con punto de trabajo
En el entorno de parametrización, desconecte la acción I (TI = 0.0) y, si es necesario, la acción D (TD = 0.0). Además, efectúe la siguiente parametrización:
• I_ITL_ON = TRUE
• I_ITLVAL = punto de trabajo
Control anticipativo (DISV)
En la entrada DISV se puede aplicar una magn
itud perturbadora de forma aditiva.
2.1.3 Cálculo del valor manipulado
En la siguiente figura se representa el diagrama de bloques del cálculo del valor manipulado:
LMN_Sum
0
1 CRP_OUT
%
LMN_NORM
ER LmnN
MAN MAN_ON
CONZ_ON,CON_ZONE
QLMN_HLM
QLMN_LLM
LMN_HLMLMN_LLM
LMN_FAC,LMN_OFFS
LMN
LMN_PER
CONZONE LMNLIMIT
PULSEGEN
Entorno de parametrización
Entorno de parametrización einterface de llamada FB
Interface de llamada FB
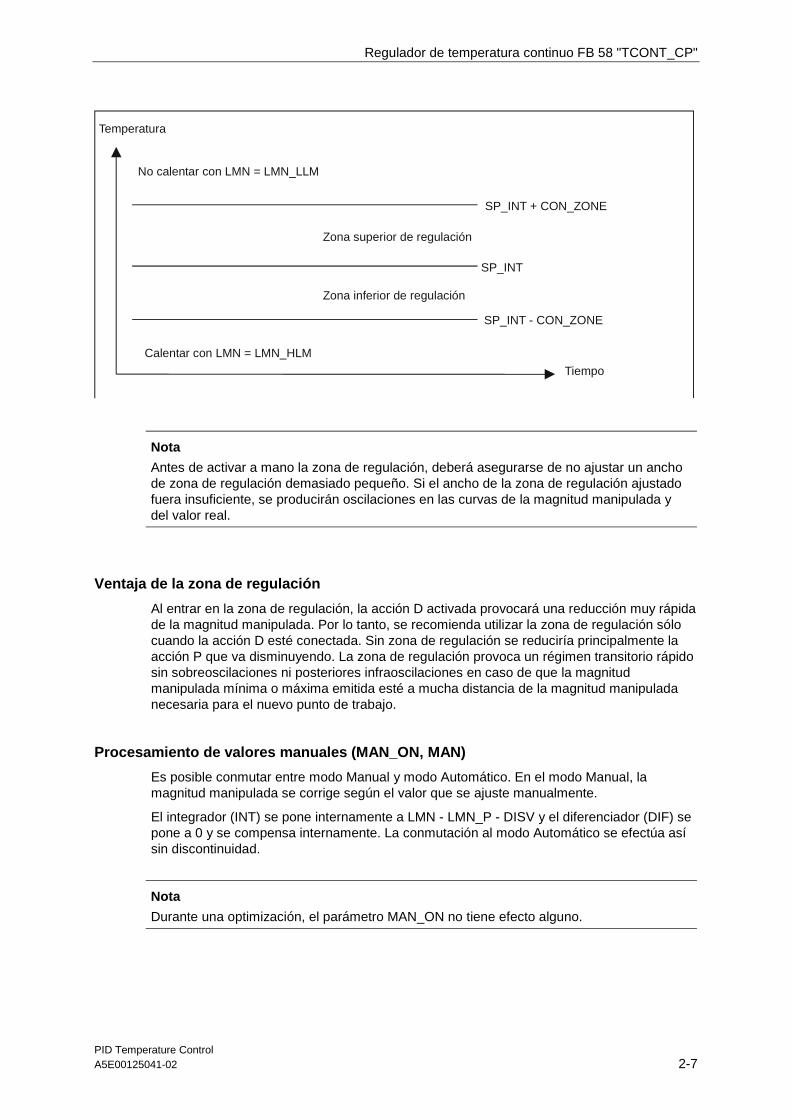
Zona de regulación (CONZ_ON, CON_ZONE)
Si CONZ_ON = TRUE, el regulador trabaja con una zona de regulación. Esto significa que el regulador se controla según el siguiente algoritmo:
• Si el valor real PV sobrepasa el valor de consigna SP_INT en más de CON_ZONE, se emite el valor LMN_LLM como margnitud manipulada (modo Regulación controlada).
• Si el valor real PV se encuentra por debajo del valor de consigna SP_INT en más de CON_ZONE, se emite el valor LMN_HLM (modo Regulación controlada).
• Si el valor real PV se mueve dentro de la zona de regulación (CON_ZONE), el valor manipulado toma el valor del algoritmo PID LMN_Sum (modo Regulación automática).
Nota
Manteniendo una histéresis del 20% de la zona de regulación se pasa del modo Regulación controlada al modo Regulación automática.
Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-7
SP_INT
Zona de regulación inferior
Zona de regulación superior
Tiempo
SP_INT + CON_ZONE
SP_INT - CON_ZONE
No calentar con LMN = LMN_LLM
Calentar con LMN = LMN_HLM
Temperatura
Nota
Antes de activar a mano la zona de regulación, deberá asegurarse de no ajustar un ancho de zona de regulación demasiado pequeño. Si el ancho de la zona de regulación ajustado fuera insuficiente, se producirán oscilaciones en las curvas de la magnitud manipulada y del valor real.
Ventaja de la zona de regulación
Al entrar en la zona de regulación, la acción D activada provocará una reducción muy rápida de la magnitud manipulada. Por lo tanto, se recomienda utilizar la zona de regulación sólo cuando la acción D esté conectada. Sin zona de regulación se reduciría principalmente la acción P que va disminuyendo. La zona de regulación provoca un régimen transitorio rápido sin sobreoscilaciones ni posteriores infraoscilaciones en caso de que la magnitud manipulada mínima o máxima emitida esté a mucha distancia de la magnitud manipulada necesaria para el nuevo punto de trabajo.
Procesamiento de valores manuales (MAN_ON, MAN)
Es posible conmutar entre modo Manual y modo Automático. En el modo Manual, la magnitud manipulada se corrige según el valor que se ajuste manualmente.
El integrador (INT) se pone internamente a LMN - LMN_P - DISV y el diferenciador (DIF) se pone a 0 y se compensa internamente. La conmutación al modo Automático se efectúa así sin discontinuidad.
Nota
Durante una optimización, el parámetro MAN_ON no tiene efecto alguno.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-8 A5E00125041-02
Limitación del valor manipulado LMNLIMIT (LMN_HLM, LMN_LLM)
El valor manipulado se limita con la función LMNLIMIT a los límites de valor manipulado LMN_HLM y LMN_LLM. Los bits indicadores QLMN_HLM y QLMN_LLM indican si se sobrepasan los límites.
Si se limita el valor manipulado, la acción I se detiene. En caso de un error de regulación que mueva la acción I hacia el margen de corrección interno, se volverá a habilitar la acción I.
Modificación online de los límites del valor manipulado
Si se reduce el rango del valor manipulado y el nuevo valor manipulado se encuentra fuera de los límites, se desplaza la acción I, y por tanto, el valor manipulado.
El valor manipulado se reduce por la diferencia entre el límite anterior y el nuevo límite del valor manipulado. Si el valor manipulado no estaba limitado antes de la modificación, se ajustará exactamente al nuevo límite (en el ejemplo aquí descrito utiliza el límite superior).
Normalización del valor manipulado LMN_NORM (LMN_FAC, LMN_OFFS)
La función LMN_NORM normaliza el valor manipulado según la siguiente regla:
LMN = LmnN * LMN_FAC + LMN_OFFS
Se puede utilizar para el siguiente propósito:
• Adaptación del valor manipulado con LMN_FAC como factor de valor modificado y LMN_OFFS como offset de valor modificado
El valor manipulado también está disponible en formato de periferia. La función CRP_OUT convierte el valor en coma flotante LMN en un valor de periferia según la siguiente regla:
LMN_PER = LMN * 27648/100
Con los valores predeterminados (LMN_FAC = 1.0 y LMN_OFFS = 0.0) se desactiva la normalización. El valor manipulado que actúa verdaderamente se obtiene en la salida LMN.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-9
2.1.4 Guardar y recargar los parámetros del regulador
En la siguiente figura se representa el diagrama de bloques:
0
1PID_CONPID_ON
PI_CON
MAN_ON &
LOAD_PID
GAIN,TI,TD,CONZONE
0
1
SAVE_PAR
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,CONZONE
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,CONZONE
MAN_ON &
UNDO_PAR
Almacenamiento de los parámetros del regulador SAVE_PAR
Si considera apropiados los parámetros actuales del regulador, puede guardarlos antes de modificarlos manualmente en parámetros de estructura propios previstos para tal fin del DB de instancia del FB 58 "TCONT_CP". En caso de optimización del regulador, los parámetros guardados se sobrescriben con los valores válidos antes de la optimización.
PFAC_SP, GAIN, TI, TD, D_F, CONZ_ON y CONZONE se escriben en la estructura PAR_SAVE.
Recarga de parámetros guardados del regulador UNDO_PAR
Esta función permite volver a activar los últimos parámetros guardados del regulador (sólo en modo Manual).
Cambio entre parámetros PI y PID LOAD_PID (PID_ON)
Tras una optimización, los parámetros PI y PID se depositan en las estructuras PI_CON y PID_CON. Con LOAD_PID (en función de PID_ON) podrá escribir los parámetros PI o PID en modo Manual en los parámetros activos del regulador.
Parámetro PID PID_ON = TRUE
Parámetro PI PID_ON = FALSE
• GAIN = PID_CON.GAIN
• TI = PID_CON.TI
• TD = PID_CON.TD
• GAIN = PI_CON.GAIN
• TI = PI_CON.TI

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-10 A5E00125041-02
Nota
• Los parámetros del regulador sólo se re-escriben con UNDO_PAR o LOAD_PID si la ganancia del regulador no es igual a cero: Con LOAD_PID se copian los parámetros sólo si GAIN <> 0 (ya sea del juego de parámetros PI o PID). Con ello se tiene en cuenta el caso de que no se haya realizado ninguna optimización o de que falte algún parámetro PID. Si PID_ON = TRUE y PID.GAIN = FALSE, entonces PID_ON se ajusta a FALSE y se copia el parámetro PI.
• D_F y PFAC_SP se predeterminan mediante la optimización. No obstante, el usuario puede modificarlos. LOAD_PID no modifica estos parámetros.
• La zona de regulación se vuelve a calcular siempre que LOAD_PID (CON_ZONE = 250/GAIN), aunque CONZ_ON = FALSE.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-11
2.2 Generador de impulsos PULSEGEN (PULSE_ON)
La función PULSEGEN convierte el valor manipulado analógico LmnN mediante una modulación del ancho de pulso en una secuencia de impulsos con el periodo PER_TM. PULSEGEN se activa con PULSE_ON=TRUE y se procesa en el ciclo CYCLE_P.
t
QPULSE
(LmnN)
0
50
100
1
0 t
PER_TM
30
50
80
Ciclo PULSEGEN = CYCLE_P
Un valor manipulado LmnN = 30 % y 10 llamadas de PULSEGEN por PER_TM significa, por tanto:
• TRUE en la salida QPULSE para las tres primeras llamadas de PULSEGEN (30 % de 10 llamadas)
• FALSE en la salida QPULSE para las otras siete llamadas de PULSEGEN (70 % de 10 llamadas)
La duración de un impulso por periodo es proporcional a la magnitud manipulada y se obtiene a partir de:
Duración de impulso = PER_TM * LmnN /100
Suprimiendo la duración mínima de impulso o la duración mínima de pausa, la característica de conversión obtiene puntos de inflexión en el rango de inicio y en el rango de fin.
En la siguiente figura se ilustra la regulación de dos niveles con rango unipolar del valor manipulado (0 % a 100 %):
Duración del impulso positivo
100.0 %
PER_TMPER_TM - P_B_TM
P_B_TM
0.0 %

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-12 A5E00125041-02
Duración mínima de impulso o de pausa (P_B_TM)
Los tiempos cortos de conexión o desconexión merman la vida útil de los elementos de maniobra y de los actuadores. Se pueden evitar parametrizando una duración mínima de impulso o de pausa P_B_TM.
Se suprimen los valores absolutos pequeños de la magnitud de entrada LmnN que pudieran generar una duración de impulso menor que P_B_TM.
Los valores de entrada grandes que generarían una duración de impulso mayor que PER_TM - P_B_TM, se ajustan a 100 %. De este modo se reduce la dinámica de la formación de impulsos.
Para la duración mínima de impulso o de pausa se recomiendan valores de ajuste P_B_TM ≤ 0,1 * PER_TM.
Los puntos de inflexión de las características representados en la figura anterior se deben a la duración mínima de impulso o de pausa.
La siguiente figura ilustra el comportamiento de la salida de impulsos:
PER_TM PER_TM
Tiempo mín.de conexión P_B_TM
Tiempo mín.de desconexión P_B_TM
1
PER_TM
Precisión de la formación de impulsos
Cuanto más pequeña sea la base de tiempo CYCLE_P con respecto al periodo PER_TM, más precisa será la modulación del ancho de pulso. Para garantizar una regulación lo suficientemente precisa, debe cumplirse la siguiente condición:
CYCLE_P ≤ PER_TM/50
De este modo, el valor manipulado se transforman en impulsos con una resolución del ≤ 2 % (consulte también el ejemplo de cifras del capítulo 2.4.3, página 2-15).
Nota
Para llamar al regulador en el ciclo de generador de impulso, es necesario tener en cuenta lo siguiente:
Durante la llamada del regulador en el ciclo de generador de impulso se divide el valor real, por lo que en la salida PV aparecen distinos valores a los de la entrada PV_IN o bien PV_PER. Para realizar una corrección de los valores de consigna, es necesario guardar el valor real del parámetro de entrada PV_IN en las llamadas de la acción del regulador continuo (QC_ACT =TRUE). Asimismo, para las llamadas pendientes es necesario disponer de los parámetros de entrada PV_IN y SP_INT con el valor real guardado.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-13
2.3 Diagrama de bloques
-
+
ER
0
1
LMN_P
LMN_I
LMN_D
0
1
ER
PID_TUNERPFAC_SP,GAIN, TI,TD, D_F,CONZ_ON,
CONZONELmnN
LmnN
PID
0
1PID_CONPID_ON
PI_CONGAIN,TI,TD,CONZONE
0
1
SAVE_PAR
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,
CONZONE
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,
CONZONE
SP_INT
LMN_Sum
GAIN
PFAC_SP
TD, D_F
INT_HPOS
INT_HNEG
TI, I_ITL_ON,
MAN MAN_ON
CONZ_ON,CON_ZONE
QLMN_HLM
QLMN_LLM
DISV
LMN_HLMLMN_LLM
LMN_FAC,LMN_OFFS
LMN
LMN_PER
QPULSE
PULSE_ON,PER_TM,BREAK_TM
TUN_ON,TUN_ST bzw. SP_INT,PID_ON,TUN_DLMN
SP_INT
PV_IN
PV_PER
PER_MODE PV_FAC,PV_OFFS
PVPER_ON
DEADB_W
PV
PV
CRP_IN
0C
%
PV_NORM
DEADBAND
X
INT
+
DIF
CONZONE LMNLIMIT
PULSEGEN
CRP_OUT
%
LMN_NORM
+
f()
MAN_ON &
UNDO_PAR
MAN_ON &
LOAD_PID
I_ITLVAL
Entorno de parametrización
Entorno de parametrización einterface de llamada FB
Interface de llamada FB

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-14 A5E00125041-02
2.4 Integración en el programa de usuario
2.4.1 Llamada del bloque de regulación
La figura siguiente contiene la llamada del regulador en formato FUP:
EN
“TCONT_CP”
DISV
PV_IN
INT_HPOS
PV_PER
INT_HNEG
CYCLE_P
SELECT
SP_INT
CYCLE
MAN
COM_RST
LMN_PER
QPULSE
QLMN_HLM
QLMN_LLM
QC_ACT
MAN_ON
LMN
PV
ENO
El FB TCONT_CP se debe llamar de forma equidistante. Para ello, utilice un nivel de alarmas cíclicas (p. ej. OB35 en S7-300). En la barra de llamadas encontrará los parámetros más importantes para interconectar el bloque con las magnitudes de proceso, como valor real, valor de consigna y valor manipulado (consulte también el anexo A.3 Ocupación de DB). En la barra de llamadas también se puede interconectar un valor manual o una magnitud perturbadora directamente.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-15
2.4.2 Llamada sin generador de impulsos (regulador continuo)
Tiempo de muestreo del regulador CYCLE
En el parámetro CYCLE se predetermina el tiempo de muestreo. Éste también se puede indicar en la herramienta de parametrización. El tiempo de muestreo CYCLE debe coincidir con la diferencia de tiempo entre dos llamadas (tiempo de ciclo del OB de alarma cíclica teniendo en cuenta las reducciones).
Cuando se optimiza el regulador, el bloque mide el tiempo que transcurre entre las llamadas y las compara con el valor parametrizado de CYCLE. En caso de que se detectara una diferencia > 5% se interrumpe la optimización y aparece el STATUS_H = 30005.
Regla empírica para el tiempo de muestreo del regulador CYCLE
El tiempo de muestreo del regulador no debe exceder el 10 % del tiempo de acción integral calculado del regulador (TI): CYCLE ≤ TI/10
2.4.3 Llamada con generador de impulsos (regulador de impulsos)
Tiempo de muestreo del regulador CYCLE y base de tiempo CYCLE_P
Si ha activado el generador de impulsos (PULSE_ON = TRUE), deberá indicar ambos tiempos de muestreo.
• En la entrada CYCLE_P se indica el tiempo de muestreo del generador de impulsos. Debe coincidir con el periodo del OB de alarma cíclica invocante. La duración del impulso generado es siempre un múltipo entero de este valor.
• En la entrada CYCLE se preselecciona el tiempo de muestreo para las demás funciones de regulación del FB 58 "TCONT_CP".
Cuando se optimiza el regulador, el bloque mide los tiempos que transcurren entre las llamadas y las compara con el valor parametrizado de CYCLE. En caso de que se detectara una diferencia > 5% se interrumpe la optimización y aparece el STATUS_H = 30005.
El FB 58 "TCONT_CP" calcula el desfase de tiempo y procesa las funciones de regulación con el tiempo de muestreo CYCLE. Asegúrese de que CYCLE sea un múltipo entero de CYCLE_P.
Se puede seleccionar un valor CYCLE inferior al periodo PER_TM. Esto resulta conveniente cuando, por un lado, se desea obtener un periodo lo más grande posible para no forzar los actuadores, y por otro, se requiere un tiempo de muestreo corto dado que el proceso de regulación es rápido.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-16 A5E00125041-02
Regla empírica para los tiempos de muestreo CYCLE y CYCLE_P
El tiempo de muestreo del regulador no debe exceder el 10 % del tiempo de acción integral calculado del regulador (TI): CYCLE ≤ TI/10
Para garantizar una resolución del valor manipulado lo suficientemente precisa, debe cumplirse la siguiente condición: CYCLE_P ≤ PER_TM/50.
Regla empírica para el periodo PER_TM
El periodo no debe sobrepasar el 20 % del tiempo de acción integral calculado del regulador (TI): PER_TM ≤ TI/5
Ejempo de los efectos de los parámetros CYCLE_P, CYCLE y PER_TM:
PER_TM = 10 s, CYCLE = 1 s, CYCLE_P = 100 ms.
Cada segundo se calcula un nuevo valor manipulado; cada 100 ms se comparan el valor manipulado y la longitud de impulso o de pausa emitida hasta entonces.
• Si se emite un impulso, existen 2 posibilidades:
- El valor manipulado calculado es mayor que la longitud de impulso/PER_TM existente hasta entonces. En tal caso, el impulso se prolonga.
- El valor manipulado calculado es menor o igual que la longitud de impulso/PER_TM existente hasta entonces. En tal caso, no se emiten más señales de impulso.
• Si no se emite ningún impulso, también caben 2 posibilidades:
- El valor (100 % - valor manipulado calculado) es mayor que la longitud de pausa/ PER_TM existente hasta entonces. En tal caso, la pausa se prolonga.
- El valor (100 % - valor manipulado calculado) es menor o igual que la longitud de pausa/ PER_TM existente hasta entonces. En tal caso, se emite una señal de impulso.

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 2-17
Diversas posibilidades de llamada en la regulación de impulsos (SELECT)
En un proceso de regulación rápido se requieren bases de tiempo muy pequeñas (p. ej. 10 ms). Debido al tiempo de ejecución del programa (CPU sobrecargada), en este caso no resulta conveniente procesar las unidades de regulación en el mismo OB de alarma cíclica que el cálculo de la salida de impulsos. El procesamiento de las funciones de regulación se traslada entonces al OB 1 o a un OB de alarma cíclica más lento (S7-400).
La siguiente tabla ofrece una visión de conjunto sobre la parametrización del parámetro de entrada SELECT:
Aplicación Llamada del bloque Funcionalidad
Caso predeterminado: Bases de tiempo no muy cortas en S7-300 y S7-400
(p. ej. CYCLE_P = 100 ms)
Llamada en el OB de alarma cíclica con SELECT = 0
Unidad de regulación y salida de impulsos en el mismo OB de alarma cíclica
Llamada condicional (QC_ACT = TRUE) en el OB1 con SELECT = 1
Unidad de regulación en el OB1
Bases de tiempo cortas en S7-300
(p. ej. CYCLE_P = 10 ms) Llamada en el OB de alarma cíclica con SELECT = 2
Salida de impulsos en el OB de alarma cíclica
Llamada en el OB de alarma cíclica lento con SELECT = 3
Unidad de regulación en el OB de alarma cíclica lento
Bases de tiempo cortas en S7-400
(p. ej. CYCLE_P = 10 ms) Llamada en el OB de alarma cíclica rápido con SELECT = 2
Salida de impulsos en el OB de alarma cíclica rápido
Nota
Si procesa las funciones del regulador y el generador de impulsos mediante dos llamadas de bloques, deberá tener en cuenta lo siguiente:
• Hay que asignar un valor al valor real (PV_IN o PV_PER) durante la llamada del generador de impulsos. Se puede asignar un valor a todos los demás operandos formales durante la llamada de las funciones de regulación.
• Hay que asignar un valor al parámetro SELECT en cada llamada.
• En caso de llamada en el OB1 con SELECT = 1, se realiza la llamada concicional del ejemplo "Regulador de impulsos OB 35, OB 1".

Regulador de temperatura continuo FB 58 "TCONT_CP"
PID Temperature Control 2-18 A5E00125041-02
Ejemplos de cifras
Precisión necesaria G
TI CYCLE = TI/10
PER_TM = TI/5
CYCLE_P = PER_TM*G
Comentario
1 % 100 s 10 s 20 s 0,2 s Llamada a través de SELECT = 0 con un tiempo de ciclo = 200 ms
1 % 5 s 0,5 s 1 s 0,01 s Es necesario llamar por separado la unidad de impulsos en niveles de alarmas cíclicas individuales.
2.4.4 Inicialización
El FB "TCONT_CP" dispone de una rutina de inicialización que se ejecuta cuando el parámetro de entrada COM_RST está ajustado a TRUE. El bloque se restablece de nuevo a FALSE tras el procsamiento de la rutina de inicialización COM_RST.
El integrador se ajusta al valor I_ITLVAL durante la inicialización. En caso de una llamada en un nivel de alarmas cíclicas, el integrador continúa trabajando a partir de este valor.
Todas las demás salidas se ajustan a sus valores iniciales.
Si desea efectuar una inicialización durante el rearranque completo de la CPU, llame el bloque en el OB100 con COM_RST = TRUE.

PID Temperature Control A5E00125041-02 3-1
3 Optimización del regulador en el FB 58 "TCONT_CP"
3.1 Introducción
La optimización del regulador puede utilizarse exclusivamente en los procesos de refrigeración o bien en los procesos de calefacción.
Con la optimización del regulador en el FB 58 "TCONT_CP" se ajustan automáticamente los parámetros PI/PID del regulador. Existen dos posibilidades de optimización:
• Optimización por aproximación al punto de trabajo con escalón de consigna
• Optimización en el punto de trabajo por activación de un bit de inicio
En ambos casos, el proceso se activa mediante un escalón predeterminable del valor manipulado. Tras detectarse un punto de inversión, los parámetros PI/PID del regulador quedan disponibles y el regulador pasa al modo Automático y continúa la regulación con dichos parámetros.
Es posible optimizar el regulador con ayuda del asistente del entorno de parametrización.
Optimización de la respuesta indicial
El diseño de regulador se ha concebido con un comportamiento óptimo frente a perturbaciones. Los parámetros "de efecto brusco" resultantes conducirían a rebases transitorios de entre el 10 % y el 40 % de la amplitud del escalón en caso de escalones de consigna. Para evitarlo, se atenúa la acción P mediante el parámetro PFAC_SP en caso de escalones de consigna. Además, en procesos de temperatura típicos, las sobreoscilaciones de los escalones de consigna grandes se pueden reducir mediante la predeterminación de valores manipulados máximos o mínimos temporales controlados (modo Regulación controlada).
Medición de los tiempos de ciclo CYCLE y CYCLE_P
Al principio de la optimización se miden el tiempo de muestreo del regulador CYCLE y, en caso de regulación de impulsos, también el tiempo de muestreo del generador de impulsos CYCLE_P. En el caso de que los valores medidos registren una diferencia de más del 5% con respecto a los valores parametrizados, se interrumpe la optimización del regulador y aparece el STATUS_H = 30005.
Almacenamiento de los parámetros del regulador (SAVE_PAR o UNDO_PAR)
Durante una optimización del regulador, los parámetros se guardan antes de la optimización. Tras la optimización, puede volver a activar los parámetros existentes antes de la optimización por medio de UNDO_PAR.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-2 A5E00125041-02
3.2 Tipos de procesos
Tipos de procesos
Junto a la ganancia del proceso GAIN_P, para un proceso son característicos los parámetros representados en la figura: tiempo de retardo TU y tiempo de compensación TA.
En la siguiente figura se representa la respuesta de salto:
t
TA
Punto de inversión
Respuesta del procesoa un escalón delvalor de consigna
TU
En la siguiente tabla se indican los diversos procesos en los que se puede aplicar el FB 58 "TCONT_CP": Tipo de proceso I Tipo de proceso II Tipo de proceso III
Proceso de temperatura típico (caso preferente)
Rango de transición Proceso de temperatura de orden elevado (muy retardado)
TU/TA < 0.1 TU/TA aprox 0.1 TU/TA> 0.1
Una constante de tiempo dominante
Dos constantes de tiempo prácticamente del mismo tamaño
Varias constantes de tiempo
El FB 58 "TCONT_CP" está concebido para procesos de temperatura típicos del tipo I. No obstante, este bloque también se puede utilizar para procesos de orden elevado del tipo II o III.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-3
3.3 Ámbito de aplicación
Comportamiento en régimen transitorio
El proceso debe mostrar un comportamiento en régimen transitorio asintótico, con retardo y estable.
Tras un salto de la magnitud manipulada, el valor real debe pasar a un estado estacionario. Por tanto, quedan excluidos los procesos que muestran un comportamiento oscilatorio incluso sin regulación, así como los procesos de regulación sin compensación (integrador en el proceso de regulación).
Linealidad y zona de trabajo
El proceso debe presentar un comportamiento lineal a lo largo de la zona de trabajo. Un comportamiento no lineal se produce, por ejemplo, si cambia un estado físico. La optimización se debe efectuar en una parte lineal de la zona de trabajo.
Es decir, tanto para la optimización como para el modo Regulación normal, los efectos no lineales de la zona de trabajo deben ser minúsculos. Por otro lado, es posible optimizar de nuevo el proceso en caso de un cambio del punto de trabajo cuando la optimización se va a efectuar de nuevo en un pequeño entorno del nuevo punto de trabajo y, durante la optimización, no se va a atravesar la no linealidad.
Cuando se conocen determinadas no linealidades estáticas (p. ej. características de válvulas), resulta siempre significativo compensarlas previamente con un levantamiento poligonal para linealizar el comportamiento del proceso.
Influencias perturbadoras en procesos de temperatura
Las influencias perturbadoras, como la transmisión de calor a zonas próximas, no deben influir con demasiada intensidad sobre los procesos de temperatura total. Por ejemplo, durante la optimización de zonas de un extrusor, todas las zonas deben calentarse simultáneamente.
Por lo que respecta a los ruidos de medición y a las perturbaciones de baja frecuencia, consulte el capítulo 3.11, página 3-12.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-4 A5E00125041-02
3.4 Ciclo completo de la optimización del regulador
Durante la optimización se ejecutan fases individuales en el algoritmo del bloque. En el parámetro PHASE se indica en qué fase se encuentra el bloque.
La optimización se inicia mediante las siguientes operaciones (consulte el capítulo 3.6, página 3-8):
• Con TUN_ON = TRUE se establece la disposición de optimización. El regulador pasa de la fase 0 a la fase 1.
• Una vez transcurrido un tiempo de espera en la fase 1, predetermine un escalón de consigna en el parámetro SP_INT o ajuste TUN_ST = TRUE. El regulador emite un escalón de consigna en TUN_DLMN y comienza a buscar un punto de inversión.
PHASE Descripción
0 No hay modo Optimización; modo Automático o Manual;
1 Disposición de optimización; comprobar parámetros, esperar activación, medir los tiempos de muestreo;
2 Optimización propiamente dicha: búsqueda de puntos de inversión con valor manipulado constante. Introducción del tiempo de muestreo en el DB de instancia.
3 (1 ciclo) Cálculo de los parámetros del proceso. Alamacenamiento de los parámetros del regulador válidos antes de la optimización.
4 (1 ciclo) Diseño del regulador
5 (1 ciclo) Corrección del regulador a la nueva magnitud manipulada
7 Comprobación del tipo de proceso
En la figura siguiente se representan las fases de la optimización de la temperatura ambiente en el punto de trabajo activada mediante un escalón de consigna:
TUN_DLMN
t
Punto de inversión
PV
FASE = 1
FASE = 2
t
TUN_ON: El bloque se pone a cero
SP
Estado frío Del proceso
Estado caliente del proceso
(punto de trabajo)
Temp. LMN
LMN
FASE = 7 FASE = 3, 4, 5 (un ciclo por fase) FASE = 0 FASE
= 0

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-5
En la figura siguiente se representan las fases de la optimización en el punto de trabajo activada mediante TUN_ST = TRUE:
FASE = 1 FASE = 2
TUN_DLMNLMN
PV
Punto de inversión
FASE = 3, 4, 5(un ciclo)
FASE = 7
Temperatura
Tiempo
Punto de trabajovalor manipulado
Punto de trabajovalor real
TUN_ON
TUN_ST
FASE = 0 FASE = 0
El bloque se pone a cero
Al final de la optimización (véase el capítulo 3.9, página 3-11), cuando el bloque vuelve a cambiar a la fase 0 y se ajusta TUN_ON = FALSE, se puede averiguar mediante el parámetro STATUS_H si la optimización se ha desarrollado sin errores.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-6 A5E00125041-02
3.5 Preparativos
SIMATIC y regulador
La optimización se inicia mediante los parámetros de entrada/salida TUN_ON, TUN_ST o SP_INT. Puede suministrar los parámetros del siguiente modo:
• Con el entorno de parametrización
• Con una unidad de observación y manejo
• Desde el programa de usuario
Configure los parámetros de entrada/salida solamente para un ciclo, ya que el FB 58 "TCONT_CP" pone a cero los parámetros.
! Advertencia
Pueden producirse daños materiales considerables, lesiones físicas graves o incluso la muerte.
Durante una optimización, el parámetro MAN_ON no tiene efecto alguno. Por lo tanto, el valor manipulado o el valor real pueden tomar valores no deseados –o extremos.
El valor manipulado se predetermina a través de la optimización. Para interrumpir la optimización, primero hay que ajustar TUN_ON = FALSE. De este modo, MAN_ON vuelve a tener efecto.
Consolidación de un estado inicial cuasi-estacionario (fase 0)
Si la magnitud regulada presentara oscilaciones de baja frecuencia, por ejemplo debido a que los parámetros del regulador estuviesen mal ajustados, habrá que controlar el regulador manualmente antes de iniciar la optimización y esperar a que desaparezcan dichas oscilaciones. Como alternativa, también se puede conmutar a un regulador PI de efecto suave (ganancia del lazo pequeña, tiempo de acción integral largo).
Ahora deberá esperar hasta que se alcance el estado estacionario, es decir, hasta que el valor real y el valor manipulado sean estacionarios. También está permitido un régimen transitorio asintótico o un desplazamiento lento del valor real (estado cuasi-estacionario, consulte la figura siguiente). La magnitud manipulada debe ser constante u oscilar alrededor de un valor medio constante.
Nota
Evitar modificar la magnitud manupulada justo antes del inicio de la optimización. La magnitud manipulada también se puede modificar de manera involuntaria mediante el establecimiento de las condiciones de ensayo (p. ej. cerrar una puerta abierta). Si este es el caso, deberá esperar como mínimo a que el valor real experimente de nuevo un régimen transitorio de forma asintótica a un estado estacionario. No obstante, conseguirá mejores parámetros de regulación si espera a que el proceso de régimen transitorio finalice completamente.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-7
Establecimiento de la disposición de optimización (fase 0 -> 1)
Puede iniciar la optimización desde el modo Manual o desde el modo Automático.
Ajuste el parámetro TUN_ON = TRUE. De este modo preparará el FB 58 "TCONT_CP" de forma que esté listo para realizar la optimización (fase 1). El bit TUN_ON sólo se puede activar en estado estacionario o durante un régimen transitorio aperiódico en estado estacionario.
Si el estado cuasi-estacionario se ha modificado desde la activación del bit TUN_ON, el nuevo estado cuasi-estacionario se debe señalizar al FB 58 "TCONT_CP" mediante la puesta a cero y la reactivación del bit TUN_ON.
En la siguiente figura se ilustra el régimen transitorio en el estado estacionario:
Tiempo
PV
FASE = 1Estado cuasi-estacionariotolerable
FASE = 1Es preferible un estado estacionario enrégimen transitorioEstado no estacionario
no permitido
Impulso del valor manipuladoLMN
Valor real
Valor manipulado
En la fase 1 se utiliza el tiempo hasta la aplicación del cambio del valor manipulado del FB 58 "TCONT_CP" para calcular el ruido del valor real NOISE_PV, la subida inicial PVDT0 y el valor medio de la magnitud manipulada (valor manipulado de inicio LMN0).
Nota
Sólo debe esperar en la fase 1 con la activación del proceso hasta que el bloque pueda calcular el valor medio de la magnitud manipulada y la subida inicial del valor real (normalmente: 1 minuto).

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-8 A5E00125041-02
En la fase 1 se miden tanto el tiempo de muestreo del regulador CYCLE como el tiempo de muestreo del generador de impulsos CYCLE_P y, al principio de la fase 2, se escriben en los parámetros de entrada/salida correspondientes. En modo Regulación sin generador de impulsos, CYCLE_P = CYCLE.
Nota
Si llama el regulador de impulsos con SELECT = 0 ó 1, deberá predeterminar la relación deseada CYCLE/CYCLE_P a través de los parámetros CYCLE y CYCLE_P antes de activar TUN_ON.
3.6 Inicio de la optimización (fase 1 -> 2)
Optimización por aproximación al punto de trabajo con escalón de consigna
La magnitud manipulada de optimización (LMN0 + TUN_DLMN) se activa mediante una modificación del valor de consigna (transición fase 1 -> 2) . No obstante, el valor de consigna no es efectivo hasta que no se alcanza el punto de inversión (sólo entonces se activa el modo Automático).
El delta del cambio del valor manipulado (TUN_DLMN) se determina de acuerdo con la modificación permitida del valor real bajo la propia responsabilidad del usuario. El signo de TUN_DLMN debe ser acorde con la modificación intencionada del valor real (hay que tener en cuenta el sentido de actuación del regulador).
El escalón de consigna y TUN_DLMN deben estar adaptados el uno al otro. Si TUN_DLMN es demasiado elevado, existe el peligro de que el punto de inversión no se encuentre dentro del 75 % del escalón de consigna.
No obstante, TUN_DLMN debe ser tan grande como para que el valor real alcance al menos el 22 % del escalón de consigna. De lo contrario, el proceso permanece en modo Optimización (fase 2). Solución: reduzca el valor de consigna durante la búsqueda del punto de inversión.
Nota
En procesos muy reterdados es aconsejable situar el valor de consigna de destino ligeramente más allá del punto de trabajo deseado durante una optimización y observar con precisión los bits de estado y PV (peligro de sobreoscilación).
Optimización sólo en el sector lineal: Determinados procesos de regulación (p. ej. calderas de fusión de cinc o magnesio) recorren un sector no lineal poco antes del punto de trabajo (modificación del estado físico). Mediante una selección oportuna del escalón de consigna, la optimización se puede limitar al sector lineal. Si el valor real ha recorrido el 75 % del escalón de consigna (SP_INT-PV0), finaliza la optimización. De forma paralela, hay que reducir TUN_DLMN de tal forma que el punto de inversión se encuentre con seguridad antes de alcanzar el 75 % del escalón de consigna.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-9
Optimización en el punto de trabajo sin escalón de consigna
La magnitud manipulada de optimización (LMN0 + TUN_DLMN) se activa mediante la activación del bit de inicio TUN_ST (transición fase 1 -> 2). Si modifica el valor de consigna, el nuevo valor de consigna no será efectivo hasta que no se alcance el punto de inversión (sólo entonces se activa el modo Automático).
El delta del cambio del valor manipulado (TUN_DLMN) se determina de acuerdo con la modificación permitida del valor real bajo la propia responsabilidad del usuario. El signo de TUN_DLMN debe ser acorde con la modificación intencionada del valor real (hay que tener en cuenta el sentido de actuación del regulador).
Precaución
En caso de activación por medio de TUN_ST, no existe ninguna desactivación de seguridad al 75 %. La optimización concluye cuando se alcanza el punto de inversión. No obstante, en caso de procesos afectados de ruido, el punto de inversión se puede sobrepasar claramente.
Interceptación de errores de manejo
Error de manejo ESTADO y medida Comentario
Activación simultánea de TUN_ON y escalón de consigna o TUN_ST
Transición a la fase 1, pero sin inicio de la optimización.
• SP_INT = SPalt o
• TUN_ST = FALSE
Se anula la modificación del valor de consigna. De este modo se evita que el regulador regule sobre el nuevo valor de consigna y abandone innecesariamente el punto de trabajo estacionario.
TUN_DLMN efectivo < 5 % (fin de la fase 1)
STATUS_H = 30002
• Transición a la fase 0
• TUN_ON = FALSE
• SP = SPalt
Interrupción de la optimización.
Se anula la modificación del escalón de consigna. De este modo se evita que el regulador regule sobre el nuevo valor de consigna y abandone innecesariamente el punto de trabajo estacionario.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-10 A5E00125041-02
3.7 Búsqueda del punto de inversión (fase 2) y cálculo de los parámetros del regulador (fase 3, 4, 5)
En la fase 2 se busca el punto de inversión en caso de valor manipulado constante. El proceso evita que se detecte el punto de inversión demasiado pronto a través del ruido de PV:
En el regulador de impulsos, se toma el promedio de PV a través de N ciclos de impulsos y, a continuación, se pone a disposición del regulador. En el regulador se vuelve a sacar la media de PV: al principio, esta promediación está inactiva, es decir, siempre se toma el promedio a través de 1 único ciclo. Siempre que el ruido sobrepase una medida concreta, se duplica la cantidad de ciclos.
Se calculan el periodo y la amplitud del ruido. Sólo cuando el gradiente se mantiene durante el periodo evaluado siempre más pequeño que la subida máxima, se interrumpe la búsqueda del punto de inversión y se abandona la fase 2. No obstante, TU y T_P_INF se calculan en el punto de inversión real.
La optimización concluye cuando también se cumplen las dos condiciones siguientes:
1. El valor real está más alejado del punto de inversión que 2*NOISE_PV.
2. El valor real ha sobrepasado el punto de inversión en un 20 %.
Nota
En caso de activación a través de un escalón de consigna, la optimización concluye, a lo sumo, cuando el valor real ha recorrido el 75 % del escalón de consigna (SP_INT-PV0) (véase abajo).
A continuación, se ejecutan las fases 3, 4 y 5 una vez. A continuación, se comprueba el tipo de proceso de la fase 7. Entonces finaliza el modo Optimización y el FB 58 "TCONT_CP"se encuentra de nuevo en la fase 0. El regulador comienza ahora con LMN = LMN0 + 0.75*TUN_DLMN en modo Automático (incluso si antes del inicio de la optimización se ha regulado en modo Manual).

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-11
3.8 Comprobación del tipo de procesos (fase 7)
En la fase 7 se comprueba, por tanto, si el tipo de proceso es correcto. Esta comprobación se realiza en modo Automático con los parámetros del regulador que se acaban de calcular y finaliza, a lo sumo, 0,35*TA (tiempo de compensación) tras el punto de inversión. Si el orden de proceso se diferencia considerablemente del valor estimado, vuelven a calcularse los parámetros del regulador y aumenta en 1el STATUS_D, de lo contrario, los parámetros del regulador se mantienen sin cambios.
Nota
Si la fase 7 se interrumpe por medio de TUN_ON=FALSE, se conservan los parámetros del regulador ya calculados.
3.9 Resultado de la optimización
La cifra izquierda de STATUS_H indica el estado de la optimización (en el anexo A.4, página A-22 encontrará una tabla detallada):
STATUS_H Resultado
0 Valor predeterminado, no se ha encontrado ningún parámetro de regulador o ningún parámetro de regulador nuevo.
10000 Se ha encontrado el parámetro de regulación adecuado.
2xxxx Se ha encontrado un parámetro de regulación sobre los valores estimados; compruebe el comportamiento del regulador o consulte el mensaje de diagnóstico STATUS_H y repita la optimización del regulador.
3xxxx Se ha producido un error de manejo; consulte el mensaje de diagnóstico STATUS_H y repita la optimización del regulador.
Los siguientes parámetros de regulación se actualizan en el FB 58 "TCONT_CP":
• Factor para la atenuación de la acción P PFAC_SP = 0.8
• Ganancia del regulador GAIN
• Tiempo de acción integral TI
• Tiempo de acción derivativa TD
• Factor en el diferenciador D_F = 5.0
• Zona de regulación ON/OFF CONZ_ON
• Ancho de zona de regulación CON_ZONE
La zona de regulación sólo se activa si el tipo de proceso (tipos I y II) y el regulador PID son adecuados (CONZ_ON = TRUE).
En función de PID_ON, se regula con un regulador PI o PID. Los parámetros antiguos del regulador se guardan y se pueden volver a activar mediante UNDO_PAR. Además, se guardan un conjunto de parámetros PI y un conjunto de parámetros PID en las estructuras PI_CON y PID_CON. Por medio de LOAD_PID y la correspondiente activación de PID_ON también se puede cambiar luego entre los parámetros PI o PID optimizados.
En la fase 1 se comprobaron ya los tiempos de muestreo CYCLE y CYCLE_P.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-12 A5E00125041-02
3.10 Interrupción de la optimización por parte del usuario
Interrupción anticipada de la optimización
En las fases 1, 2 ó 3 se puede cancelar la optimización sin que se calculen los parámetros nuevos restableciendo TUN_ON = FALSE. El regulador se inicia en modo Automático con LMN = LMN0 + TUN_DLMN. Si el regulador se encontraba en modo Manual antes de la optimización, se emitirá el valor manipulado manual antiguo.
Si en las fases 4, 5 ó 7 se cancela la optimización con TUN_ON = FALSE, se conservan los parámetros del regulador calculados hasta entonces.
3.11 Imágenes de error y solución de errores
Punto de inversión no alcanzado (sólo en caso de activación a través de un escalón de consigna)
La optimización concluye, a lo sumo, cuando el valor real ha recorrido el 75 % del escalón de consigna (SP-INT-PV0). Esto se indica en STATUS_H (2xx2x) mediante "Punto de inversión no alcanzado".
Se aplica siempre el valor de consigna ajustado momentáneamente. Reduciendo el valor de consigna se puede finalizar la optimización posteriormente de forma anticipada.
En caso de procesos de temperatura típicos, por norma general es suficiente interrumpir la optimización al 75 % del escalón de consigna para evitar sobreoscilaciones. Se recomienda un cuidado especial, sobre todo en caso de procesos muy retardados (TU/TA > 0.1, tipo de proceso III). Si el cambio del valor manipulado es demasiado fuerte en comparación con el escalón de consigna, el valor real puede sobreoscilar con fuerza (hasta el factor 3).
Si, en caso de procesos de orden elevado, el punto de inversión sigue estando lejos tras alcanzar el 75 % del escalón de consigna, se produce una clara sobreoscilación. Además, los parámetros de regulación tienen un efecto demasiado brusco. Atenúe los parámetros del regulador o inténtelo de nuevo.
Optimización del regulador en el FB 58 "TCONT_CP"
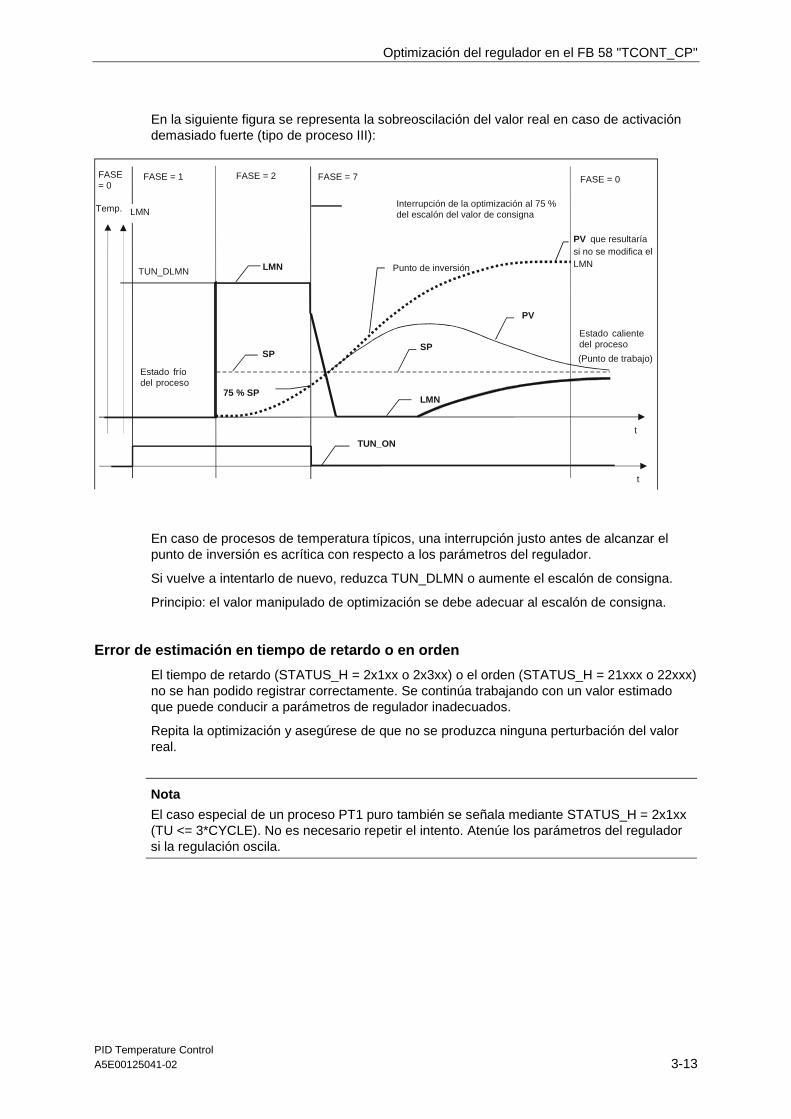
PID Temperature Control A5E00125041-02 3-13
En la siguiente figura se representa la sobreoscilación del valor real en caso de activación demasiado fuerte (tipo de proceso III):
TUN_DLMN
t
FASE = 1 FASE = 2
t
TUN_ON
Estado proceso
frío del
Estado proceso
caliente del (Punto de trabajo)
LMN
LMN
FASE = 7 FASE = 0
SP
Punto de inversión
SP
LMN
PV
Interrupción de la optimización al 75 % del escalón del valor de consigna
PV que resultaría si no se modifica el LMN
75 % SP
Temp.
FASE = 0
En caso de procesos de temperatura típicos, una interrupción justo antes de alcanzar el punto de inversión es acrítica con respecto a los parámetros del regulador.
Si vuelve a intentarlo de nuevo, reduzca TUN_DLMN o aumente el escalón de consigna.
Principio: el valor manipulado de optimización se debe adecuar al escalón de consigna.
Error de estimación en tiempo de retardo o en orden
El tiempo de retardo (STATUS_H = 2x1xx o 2x3xx) o el orden (STATUS_H = 21xxx o 22xxx) no se han podido registrar correctamente. Se continúa trabajando con un valor estimado que puede conducir a parámetros de regulador inadecuados.
Repita la optimización y asegúrese de que no se produzca ninguna perturbación del valor real.
Nota
El caso especial de un proceso PT1 puro también se señala mediante STATUS_H = 2x1xx (TU <= 3*CYCLE). No es necesario repetir el intento. Atenúe los parámetros del regulador si la regulación oscila.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-14 A5E00125041-02
Calidad de las señales de medición (ruido de medición, perturbaciones de baja frecuencia)
El resultado de la optimización puede verse perjudicado por ruidos de medición o perturbaciones de baja frecuencia. Tenga en cuenta lo siguiente:
• En caso de ruidos de medición, es preferible seleccionar una frecuencia de muestreo alta que una frecuencia de muestreo baja. Para ello, hay que explorar el valor real al menos dos veces dentro de un periodo de ruidos. En el modo Impulsos resulta muy útil el filtrado del valor medio integrado. Sin embargo, presupone que el valor real PV se va a transmitir al bloque en un ciclo rápido de impulsos. La cantidad de ruido no debe sobrepasar el 5 % de la modificación de la señal útil.
• Las perturbaciones de alta frecuencia no se pueden filtrar a través de un bloque de software. Hay que filtrarlas en el detector para evitar el denominado efecto aliasing. En la siguiente figura se ilustra el efecto aliasing con un tiempo de muestreo demasiado elevado:
t
X
• En caso de perturbaciones de baja frecuencia es relativamente fácil garantizar una velocidad de muestreo lo suficentemente alta. Por otro lado, TCONT_CP debe generar una señal de medición uniforme a través de un gran intervalo del filtrado del valor medio. Un filtrado del valor medio debe abarcar como mínimo dos periodos de ruidos. De forma interna, en el bloque se originan tiempos de muestreo cada vez mayores, de tal forma que disminuye la precisión de la optimización. Una precisión lo suficientemente elevada se garantiza con al menos 40 periodos de ruido hasta el punto de inversión. Medida viable en la repetición del intento: aumento de TUN_DLMN.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-15
Sobreoscilaciones
En las siguientes situaciones se pueden producir sobreoscilaciones:
Situación Causa Solución
Final de la optimización
• Activación a través de una modificación demasiado fuerte del valor manipulado en comparación con el escalón de consigna (véase arriba).
• Regulador PI activado a través de PID_ON = FALSE.
• Aumente el escalón de consigna o reduzca el salto del valor manipulado.
• Si el proceso admite un regulador PID, inicie la optimización con PID_ON = TRUE.
Optimización en fase 7
Se calculan primero los parámetros de efecto más suave del regulador (tipo de proceso III), que pueden conducir a una sobreoscilación en la fase 7.
-
Modo Regulación
Regulador PI y con PFAC_SP = 1.0 para el tipo de proceso I.
Si el proceso admite un regulador PID, inicie la optimización con PID_ON = TRUE.
Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-16 A5E00125041-02
3.12 Post-optimización manual en modo Regulación
Para conseguir un comportamiento del valor de consigna sin sobreoscilaciones, puede llevar a cabo las medidas descritas a continuación:
Ajuste de la zona de regulación
Durante la optimización se calcula una zona de regulación CON_ZONE del FB 58 "TCONT_CP" y se activa con el regulador PID y el tipo de proceso adecuado (tipo de proceso I y II): CONZ_ON = TRUE. En el modo Regulación se puede modificar o desconectar completamente la zona de regulación (con CONZ_ON = FALSE).
Nota
Si activa la zona de regulación en procesos de orden elevado (tipo de proceso III), no conseguirá ninguna ventaja, ya que la zona de regulación será mayor que el rango de regulación alcanzable con el 100 % de la magnitud manipulada. La activación de la zona de regulación para reguladores PI tampoco representa ninguna ventaja.
Antes de activar a mano la zona de regulación, deberá asegurarse de no ajustar un ancho de zona de regulación demasiado pequeño. Si el ancho de la zona de regulación ajustado es demasiado pequeño, se producirán oscilaciones durante el curso de la magnitud manipulada y del valor real.
Atenuación continua de la respuesta indicial con PFAC_SP
La respuesta indicial se puede atenuar con el parámetro PFAC_SP. Este parámetro determina hasta qué punto va a ser efectiva la acción P en caso de escalones de consigna.
PFAC_SP se predetermina a 0.8 a través de la optimización independientemente del tipo de proceso; después, el usuario puede modificar este valor. Para limitar la sobreoscilación en caso de escalones de consigna (por lo demás, parámetros de regulador correctos) a un 2 % aprox., son suficientes los siguientes valores para PFAC_SP:
Tipo de proceso I Tipo de proceso II Tipo de proceso III
Proceso de temperatura típico
Rango de transición
Proceso de temperatura de orden elevado
PI 0.8 0.82 0.8
PID 0.6 0.75 0.96
Adapte el factor predeterminado (0.8) especialmente en los siguientes casos:
• Tipo de proceso I con PID (0.8 -> 0.6): los escalones de consigna dentro de la zona de regulación conducen con PFAC_SP = 0.8 a aprox. un 18 % de sobreoscilaciones.
• Tipo de proceso III con PID (0.8 -> 0.96): los escalones de consigna con PFAC_SP = 0.8 se atenúan con demasiada fuerza. Se desperdicia una cantidad considerable de tiempo de regulación.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-17
Ejemplo de atenuación de la respuesta indicial con PFAC_SP
Parámetros del proceso:
• GAIN = 6
• T1 = 50 s
• T2 = 5 s;
Parámetros del regulador:
• GAIN = 1.45
• TI = 19.6 s
La siguiente figura contiene tres intentos con un escalón de consigna de 0 a 60 respectivamente:
Consigna
Valor real
Valor manipulado
Zoom
Valor real
Intento PFAC_SP Comentario Sobreoscilaciones
Izquierda 8:18 1.0 Sin acción P en la retroalimentación; respuesta indicial atenuada
32 %
Medio 8:19 0.8 Acción P hasta un 20 % en la retroalimentación; respuesta indicial optima
2 %
Derecha 8:20 0.0 Acción P completamente en la retroalimentación; atenuada con demasiada intensidad, mucho tiempo en régimen transitorio
-

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-18 A5E00125041-02
Atenuación de los parámetros de regulación
Si en el lazo de regulación cerrado se producen oscilaciones o si existen rebases transitorios, puede desviar la ganancia del regulador GAIN (por ejemplo al 80 % del valor original) y ampliar el tiempo de acción integral TI (p. ejemplo al 150 % del valor original). Si la magnitud manipulada analógica del regulador continuo se transforma en señales manipuladas binarias con un generador de impulsos, pueden producirse pequeñas oscilaciones permanentes debido al efecto de cuantificación. Puede eliminarlas aumentando la zona muerta de regulación DEADB_W.
Modificación de los parámetros del regulador
Si desea modificar los parámetros del regulador, proceda del siguiente modo:
1. Guarde los parámetros actuales con SAVE_PAR.
2. Modifique los parámetros.
3. Compruebe el comportamiento de la regulación.
Si los nuevos parámetros resultan ser peores que los antiguos, vuelva a ajustar los parámetros antiguos con UNDO_PAR.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control A5E00125041-02 3-19
3.13 Optimización paralela de los canales del regulador
Zonas cercanas (gran acoplamiento térmico)
Si dos o más reguladores regulan la temperatura, p. ej., en una placa (es decir, dos calefacciones y dos valores reales medidos con gran acoplamiento térmico), proceda del siguiente modo:
1. Asocie las dos salidas QTUN_RUN con el nexo lógico OR.
2. Interconecte las dos entradas TUN_KEEP con la salida del elemento OR.
3. Inicie ambos reguladores predeterminando siumltáneamente un escalón de consigna o activando al mismo tiempo TUN_ST.
En la siguiente figura se ilustra la optimización paralela de los canales del regulador:
≥1
QTUN_RUN
TUN_KEEP
TCONT_CP, DB2_TCONT_CP
QTUN_RUN
TUN_KEEP
TCONT_CP, DB1_TCONT_CP
Ventaja: Los dos reguladores emiten LMN0 + TUN_DLMN hasta que ambos hayan abandonado la fase 2. De este modo se evita que el regulador que finalice primero la optimización falsee el resultado de optimización del otro regulador a través de la modificación de su magnitud manipulada.
Precaución
Cuando se alcanza el 75 % del escalón de consigna, se abandona la fase 2 y, por tanto, se pone a cero la salida QTUN_RUN. No obstante, el modo Automático no comienza hasta que TUN_KEEP también sea igual a cero.

Optimización del regulador en el FB 58 "TCONT_CP"
PID Temperature Control 3-20 A5E00125041-02
Zonas cercanas (ligero acoplamiento térmico)
Por norma general, se aplica el principio de que se debe optimizar de la misma forma que luego se va a regular. Si en el modo Producción se gestionan conjuntamente las zonas de forma paralela, de forma que las diferencias de temperatura entre las zonas se mantengan iguales, durante la optimización también habrá que aumentar correspondientemente el nivel de temperatura de las zonas cercanas.
Las diferencias de temperatura respecto al inicio del intento no desempeñan ningún papel, ya que se compensan por medio de una calefacción inicial(-> subida inicial = 0).

PID Temperature Control A5E00125041-02 4-1
4 Regulador de temperatura discontinuo FB 59 "TCONT_S"
4.1 Acción reguladora
4.1.1 Formación del error de regulación
Diagrama de bloques
SP_INT
PV_IN
PV_PER
CRP_IN
PER_MODE
PV_NORM
PV_FAC,PV_OFFS
*0,1 0C*0,01 0C %
1
0
PVPER_ON
PV
DEADBAND
DEADB_W
ER+
Entorno de parametrización
Entorno de parametrización einterface de llamada FB
Interface de llamada FB
Rama del valor de consigna
El valor de consigna se introduce en la entrada SP_INT en coma flotante sea de física o en porcentajes. El valor de consigna y el valor real deben indicarse con la misma unidad en la formación del error de regulación.
Selección del valor real (PVPER_ON)
El valor real se puede leer en formato de coma flotante o en formato de periferia, de acuerdo con PVPER_ON.
PVPER_ON Introducción del valor real
TRUE El valor real se lee a través de la periferia analógica (PEW xxx) en la entrada PV_PER.
FALSE El valor real se lee en formato de coma flotante en la entrada PV_IN.
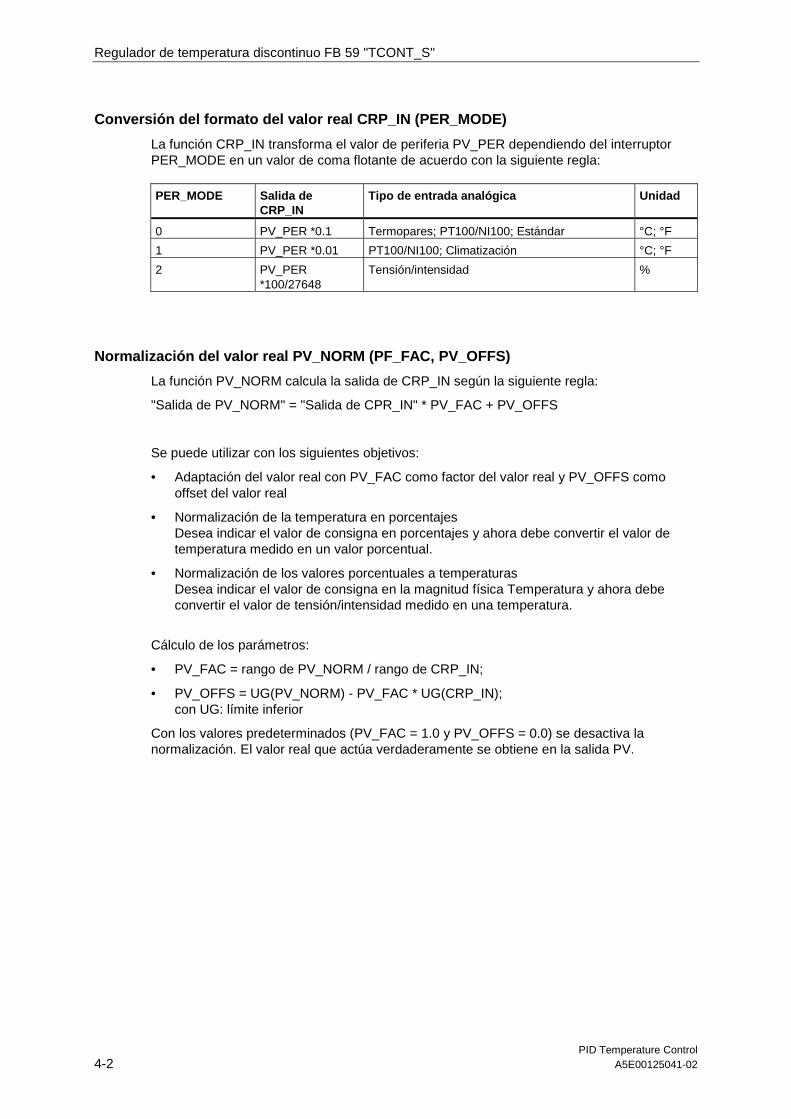
Regulador de temperatura discontinuo FB 59 "TCONT_S"
PID Temperature Control 4-2 A5E00125041-02
Conversión del formato del valor real CRP_IN (PER_MODE)
La función CRP_IN transforma el valor de periferia PV_PER dependiendo del interruptor PER_MODE en un valor de coma flotante de acuerdo con la siguiente regla: PER_MODE Salida de
CRP_IN Tipo de entrada analógica Unidad
0 PV_PER *0.1 Termopares; PT100/NI100; Estándar °C; °F
1 PV_PER *0.01 PT100/NI100; Climatización °C; °F
2 PV_PER *100/27648
Tensión/intensidad %
Normalización del valor real PV_NORM (PF_FAC, PV_OFFS)
La función PV_NORM calcula la salida de CRP_IN según la siguiente regla:
"Salida de PV_NORM" = "Salida de CPR_IN" * PV_FAC + PV_OFFS
Se puede utilizar con los siguientes objetivos:
• Adaptación del valor real con PV_FAC como factor del valor real y PV_OFFS como offset del valor real
• Normalización de la temperatura en porcentajes Desea indicar el valor de consigna en porcentajes y ahora debe convertir el valor de temperatura medido en un valor porcentual.
• Normalización de los valores porcentuales a temperaturas Desea indicar el valor de consigna en la magnitud física Temperatura y ahora debe convertir el valor de tensión/intensidad medido en una temperatura.
Cálculo de los parámetros:
• PV_FAC = rango de PV_NORM / rango de CRP_IN;
• PV_OFFS = UG(PV_NORM) - PV_FAC * UG(CRP_IN); con UG: límite inferior
Con los valores predeterminados (PV_FAC = 1.0 y PV_OFFS = 0.0) se desactiva la normalización. El valor real que actúa verdaderamente se obtiene en la salida PV.

Regulador de temperatura discontinuo FB 59 "TCONT_S"
PID Temperature Control A5E00125041-02 4-3
Ejemplo de normalización del valor real
Si desea preseleccionar el valor de consigna en porcentajes, y en CRP_IN existe un rango de temperatura de -20 a 85 °C, deberá normalizar el rango de temperatura a valores porcentuales.
En la siguiente figura se ilustra la adaptación de un rango de temperatura de entre -20 y 85 °C a valores de 0 a 100 %:
PV_NORM [%]
100
75
50
25
-20 20 40 60 80 85 [°c]CRP_IN
PV_OFFS = 0-0.9524*(-20)
PV_FAC = 100/(85-(-20)) = 0.9524
= 19.05
Formación del error de regulación
La diferencia entre el valor de consigna y el valor real constituye el error de regulación antes de la zona muerta. El valor de consigna y el valor real deben indicarse con la misma unidad.
Zona muerta (DEADB_W)
Para suprimir la pequeña oscilación permanente debida a la cuantificación de la magnitud manipulada (p. ej. en una modulación de ancho de pulso con PULSEGEN), el error de regulación se conduce por una zona muerta (DEADBAND). Si DEADB_W = 0.0, quiere decir que la zona muerta está desactivada.
ER
SP_INT - PV
ER = (SP_INT - PV) - DEAD_WER = (SP_INT - PV) + DEAD_W
DEADB_W

Regulador de temperatura discontinuo FB 59 "TCONT_S"
PID Temperature Control 4-4 A5E00125041-02
4.1.2 Algoritmo del regulador discontinuo PI
El FB 59 "TCONT_S" opera sin realimentación de posición (consulte el diagrama de bloques del capítulo 4.2, página 4-5). La acción I del algoritmo PI y la realimentación de posición imaginada se calculan en una acción I (INT) y se comparan como valor de realimentación con la acción P restante. La diferencia pasa a un elemento de tres niveles (THREE_ST) y a un generador de impulsos (PULSEOUT), que genera los impulsos para la válvula de control. Mediante una adaptación del umbral de respuesta del elemento de tres niveles se reduce la frecuencia de conmutación del regulador.
Atenuación de la acción P en caso de modificaciones del valor de consigna (PFAC_SP)
Para evitar sobreoscilaciones, es posible atenuar la acción P a través del parámetro "Ganancia proporcional al cambiar el valor de consigna" (PFAC_SP). Mediante PFAC_SP puede seleccionar ahora de forma continua entre 0.0 y 1.0 para definir la intensidad de la acción P en caso de modificaciones del valor de consigna:
• PFAC_SP = 1.0: la acción P está completamente operativa en caso de modificación del valor de consigna.
• PFAC_SP = 0.0: sin acción P en caso de modificación del valor de consigna.
Un valor de PFAC_SP inferior a 1.0 puede reducir las sobreoscilaciones como en el caso de un regulador continuo si el tiempo de ejecución del motor MTR_TM es corto con respecto al tiempo de compensación TA, y la relación TU/TA es menor que 0.2. Si MTR_TM alcanza el 20 % de TA, sólo se puede lograr una pequeña mejora.
Control anticipativo
En la entrada DISV se puede aplicar una magnitud perturbadora de manera aditiva.
Procesamiento de valores manuales (LMNS_ON, LMNUP, LMNDN)
LMNS_ON permite conmutar entre los modos Manual y Automático. En el modo Manual, el actuador se detiene y el integrador (INT) se pone a 0 de forma interna. Mediante LMNUP y LMNDN se puede mover el actuador ARRIBA y ABAJO. La conmutación al modo Automático se efectúa con discontinuidad. El error de regulación existente conduce, a través de GAIN, a una modificación en forma de salto de la magnitud manipulada interna. Mediante el actuador de acción integral sólo se consigue un control del proceso en forma de rampa.

Regulador de temperatura discontinuo FB 59 "TCONT_S"
PID Temperature Control A5E00125041-02 4-5
4.2 Diagrama de bloques
+
THREE_ST
PULSEOUT
AND
AND
AND
AND
100.0
0.0
-100.0
0.0X
INT
OR
10.0
+
-
0.0
0
1
0
1
0
0
1
1
0X
1
0
+-
adaptiv
CRP_IN
0C
%
PV_NORM -
+ X
ER
0
1
SP_INT
PV_IN
PV_PER
PER_MODE PV_FAC,
PV_OFFS
PVPER_ON
DEADB_WPV
Entorno de parametrización
Entorno de parametrización einterface de llamada FB
Interface de llamada FB
LMNR_HS
LMNR_LS
LMNUP
LMNDNLMNS_ON
DISV
MTR_TMPULSE_TM,BREAK_TM
QLMNUP
QLMNDN
LMNS_ON
1/TI
1/MTR_TM
DEADBAND
SP_INT
PFAC_SP
f()

Regulador de temperatura discontinuo FB 59 "TCONT_S"
PID Temperature Control 4-6 A5E00125041-02
4.3 Integración en el programa de usuario
4.3.1 Llamada del bloque de regulación
La figura siguiente contiene la llamada del regulador en formato FUP:
EN
“TCONT_S”
PV_IN
CYCLE
PV_PER
SP_INT
DISV
LMNS_ON
LMNR_HS
LMNUP
LMNR_LS
LMNDN
COM_RST
QLMNUP
QLMNDN
PV
ER
ENO
El FB TCONT_S se debe llamar de forma equidistante. Para ello, utilice un nivel de alarmas cíclicas (p. ej. OB35 en S7-300). En la barra de llamadas encontrará los parámetros más importantes para interconectar el bloque con las magnitudes de proceso, como valor real, valor de consigna y valor manipulado. En la barra de llamadas también se pueden interconectar las señales de valor manual o una magnitud perturbadora directamente.

Regulador de temperatura discontinuo FB 59 "TCONT_S"
PID Temperature Control A5E00125041-02 4-7
4.3.2 Tiempo de muestreo del regulador
En el parámetro CYCLE se predetermina el tiempo de muestreo. Éste también se puede indicar en la herramienta de parametrización. El tiempo de muestreo CYCLE debe coincidir con la diferencia de tiempo entre dos llamadas (tiempo de ciclo del OB de alarma cíclica teniendo en cuenta las reducciones).
Regla empírica para el tiempo de muestreo del regulador CYCLE
El tiempo de muestreo del regulador no debe exceder el 10 % del tiempo de acción integral calculado del regulador (TI). Sin embargo, por regla general, se debe ajustar un tiempo de muestreo bastante más corto para garantizar la precisión necesaria del regulador discontinuo (consulte el ejemplo de cifras que aparece a continuación).
Ejemplo de cifras
Precisión necesaria G
MTR_TM CYCLE = MTR_TM*G Comentario
0,5 % 10 s 0,05 s El tiempo de muestreo está determinado por la precisión requerida del regulador discontinuo.
4.3.3 Inicialización
El FB "TCONT_S" dispone de una rutina de inicialización que se ejecuta cuando el parámetro de entrada COM_RST está ajustado a TRUE. El bloque se restablece de nuevo a FALSE tras el procsamiento de la rutina de inicialización COM_RST.
Todas las salidas se ajustan a sus valores iniciales.
Si desea efectuar una inicialización durante el rearranque completo de la CPU, llame el bloque en el OB100 con COM_RST = TRUE.

Regulador de temperatura discontinuo FB 59 "TCONT_S"
PID Temperature Control 4-8 A5E00125041-02
PID Temperature Control A5E00125041-02 5-1
5 Guía rápida (Getting Started)
Objetivo
Con ayuda del sencillo ejemplo expuesto a continuación "zEs01_13_STEP7__PID-Temp -> regulador de impulsos" podrá aprender a regular el proceso de temperatura simulado con el regulador de temperatura FB 58 "TCONT_CP" y a calcular de manera online los parámetros PID del regulador.
Requisitos
Se deben cumplir los siguientes requisitos:
• Dispone de un equipo S7-300/400 compuesto por una fuente de alimentación y una CPU.
• En la PG está instalado STEP 7 (≥ V5.1 SP3).
• La PG está conectada a la CPU.
Creación de un proyecto nuevo y copia del ejemplo
Secuencia Operación Resultado
1 Cree un proyecto en el Administrador SIMATIC mediante Archivo->Nuevo...
En el Administrador SIMATIC aparecerá la ventana de proyectos.
2 Inserte un equipo SIMATIC 300 ó 400 de acuerdo con la configuración de su hardware.
3 Configure el equipo con HW Config y ajuste el tiempo de ciclo del nivel de alarmas cíclicas del OB35 a 20ms.
4 Copie en su equipo el programa Regulador de impulsos del proyecto de ejemplo zEs01_13_STEP7__PID-Temp.
Ya se puede cargar el programa en la CPU.
5 Seleccione su programa y cópielo con Sistema de destino -> Cargar en la CPU.

Guía rápida (Getting Started)
PID Temperature Control 5-2 A5E00125041-02
Optimización del regulador con el entorno de parametrización
Secuencia Operación Resultado
1 Abra la herramienta de parametrización haciendo doble clic en el DB de instancia DB_TCONT_CP en el Administrador SIMATIC.
La herramienta de parametrización aparecerá en pantalla.
2 Seleccione la opción Optimización del regulador del menú Herramientas.
Se abrirán el registrador de curvas y el primer cuadro de diálogo del asistente.
3 Compruebe en el registrador de curvas que el valor manipulado y el valor real sean casi estacionarios y haga clic en Sigueinte.
Aparecerá el cuadro de diálogo "Determinar el tipo de regulador".
4 Seleccione "Parámetros PID" y haga clic en Siguiente.
Aparecerá el cuadro de diálogo "Elegir el tipo de activación del proceso".
5 Seleccione "Optimización por aproximación al punto de trabajo con escalón de consigna" y haga clic en Siguiente.
Aparecerá el cuadro de diálogo "Activación del proceso".
6 Ajuste el punto de trabajo a 70 y la diferencia del valor manipulado a 80 y haga clic en Siguiente.
Aparecerá el cuadro de diálogo "Estado y resultado de la optimización".
7 Cuando concluya la optimización dle regulador, haga clic en Cerrar.
El asistente y el registrador de curvas se cerrarán.
Ahora puede probar los parámetros hallados del regulador activando un escalón de consigna o una perturbación en el proceso.
Activación de un escalón de consigna
Secuencia Operación Resultado
1 Abra el registrador de curvas mediante el elemento de menú Herramientas.
En pantalla aparecerá la ventana del registrador de curvas.
2 Abra el cuadro de diálogo Puesta en servicio a través del elemento de menú Herramientas.
Aparecerá el cuadro de diálogo Puesta en servicio.
3 Indique un escalón de consigna de 90 en el parámetro Valor de consigna y pulse el botón Enviar.
El valor manipulado del registrador de curvas cambiará directamente.
4 Observe el comportamiento en régimen transitorio de los valores real y manipulado.
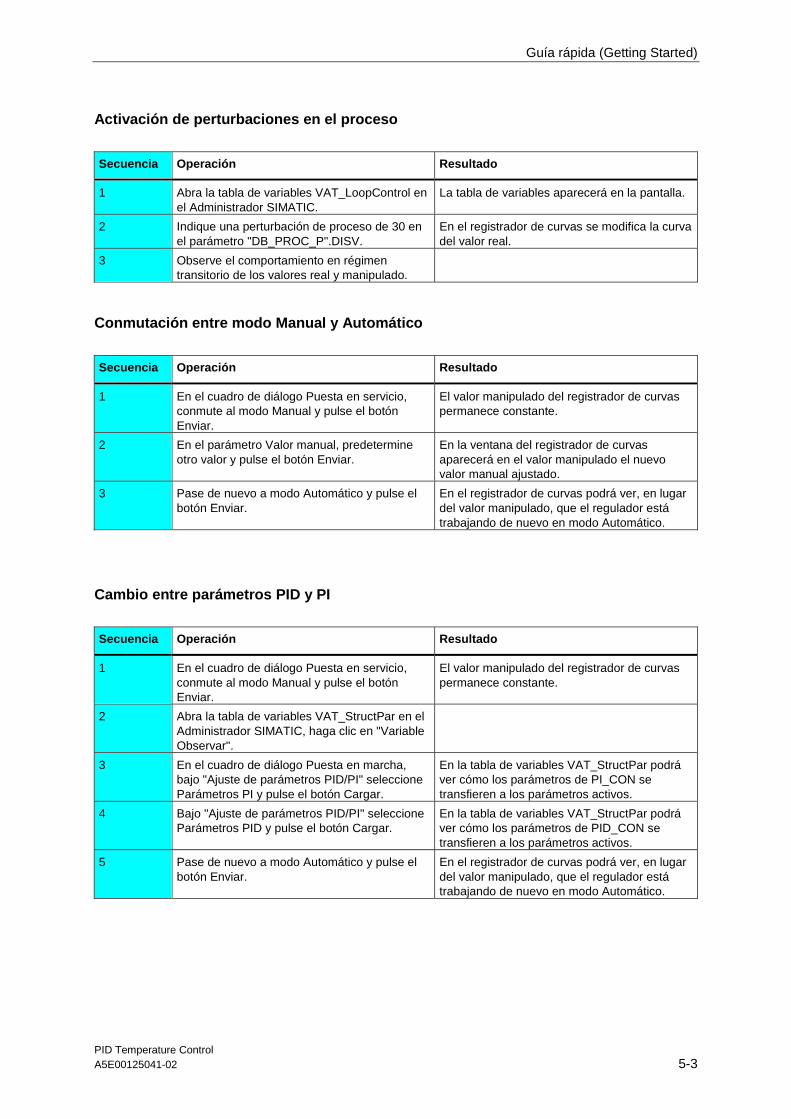
Guía rápida (Getting Started)
PID Temperature Control A5E00125041-02 5-3
Activación de perturbaciones en el proceso
Secuencia Operación Resultado
1 Abra la tabla de variables VAT_LoopControl en el Administrador SIMATIC.
La tabla de variables aparecerá en la pantalla.
2 Indique una perturbación de proceso de 30 en el parámetro "DB_PROC_P".DISV.
En el registrador de curvas se modifica la curva del valor real.
3 Observe el comportamiento en régimen transitorio de los valores real y manipulado.
Conmutación entre modo Manual y Automático
Secuencia Operación Resultado
1 En el cuadro de diálogo Puesta en servicio, conmute al modo Manual y pulse el botón Enviar.
El valor manipulado del registrador de curvas permanece constante.
2 En el parámetro Valor manual, predetermine otro valor y pulse el botón Enviar.
En la ventana del registrador de curvas aparecerá en el valor manipulado el nuevo valor manual ajustado.
3 Pase de nuevo a modo Automático y pulse el botón Enviar.
En el registrador de curvas podrá ver, en lugar del valor manipulado, que el regulador está trabajando de nuevo en modo Automático.
Cambio entre parámetros PID y PI
Secuencia Operación Resultado
1 En el cuadro de diálogo Puesta en servicio, conmute al modo Manual y pulse el botón Enviar.
El valor manipulado del registrador de curvas permanece constante.
2 Abra la tabla de variables VAT_StructPar en el Administrador SIMATIC, haga clic en "Variable Observar".
3 En el cuadro de diálogo Puesta en marcha, bajo "Ajuste de parámetros PID/PI" seleccione Parámetros PI y pulse el botón Cargar.
En la tabla de variables VAT_StructPar podrá ver cómo los parámetros de PI_CON se transfieren a los parámetros activos.
4 Bajo "Ajuste de parámetros PID/PI" seleccione Parámetros PID y pulse el botón Cargar.
En la tabla de variables VAT_StructPar podrá ver cómo los parámetros de PID_CON se transfieren a los parámetros activos.
5 Pase de nuevo a modo Automático y pulse el botón Enviar.
En el registrador de curvas podrá ver, en lugar del valor manipulado, que el regulador está trabajando de nuevo en modo Automático.

Guía rápida (Getting Started)
PID Temperature Control 5-4 A5E00125041-02
Recarga y almacenamiento de los parámetros del regulador
Secuencia Operación Resultado
1 En el cuadro de diálogo Puesta en servicio, conmute al modo Manual y pulse el botón Enviar.
El valor manipulado del registrador de curvas permanece constante.
2 Abra la tabla de variables VAT_StructPar en el Administrador SIMATIC, haga clic en "Variable Observar".
3 Pulse el botón Cargar de la opción "Parám. PID y de zona de regulación protegidos".
En la tabla de variables VAT_StructPar podrá ver cómo los parámetros de PAR_SAVE se transfieren a los parámetros activos.
4 Modifique los valores de los parámetros activos para poder reconocer luego que han sido transferidos.
5 Pulse el botón Proteger de la opción "Parámetros PID y de zona de regulación".
En la tabla de variables VAT_StructPar podrá ver cómo los parámetros activos se transfieren a los parámetros de PAR_SAVE.
6 Pase de nuevo a modo Automático y pulse el botón Enviar.
En el registrador de curvas podrá ver, en lugar del valor manipulado, que el regulador está trabajando de nuevo en modo Automático.

PID Temperature Control A5E00125041-02 6-1
6 Reguladores de temperatura: ejemplos
6.1 Introducción
Vista general
En este capítulo encontrará ejemplos de aplicación ejecutables de los reguladores de temperatura FB 58 "TCONT_CP" y FB 59 "TCONT_S" con simulación del proceso.
Los ejemplos se encuentran en el catálogo ...\STEP7\EXAMPLES.
Requisitos
• Dispone de un equipo S7 compuesto por una fuente de alimentación y una CPU montada y cableada.
• En la PG está instalado STEP 7 (>= V5.1 + Service Pack 3).
• La PG está conectada a la CPU.
Preparación de los ejemplos
1. Abra el proyecto de ejemplo zEs01_13_STEP7__PID-Temp de la carpeta ...\STEP7\EXAMPLES con el Administrador SIMATIC y cópielo en el directorio del proyecto con un nombre adecuado (Archivo > Guardar como). Utilice la representación Ver > Detalles para visualizar las informaciones completas.
2. Inserte un equipo en su proyecto de acuerdo con la configuración de su hardware.
3. Seleccione un programa de ejemplo y copie el programa en el equipo.
4. Configure el hardware con HW Config.
5. Guarde la configuración del hardware y cárguela en la CPU.
6. Cargue la carpeta de bloques en la CPU.

Reguladores de temperatura: ejemplos
PID Temperature Control 6-2 A5E00125041-02
Código de los ejemplos
Los ejemplos están escritos en AWL. Puede visualizarlos directamente a través del editor KOP/AWL/FUP. En este editor, seleccione "Representación simbólica", "Selección de símbolos" y "Comentario" mediante Ver > Mostrar. Si dispone de espacio suficiente en la pantalla, también puede visualizar la "Información del símbolo".
Aplicación de un ejemplo
Los programas de ejemplo contienen tablas de variables (VAT) con las que se pueden ver y modificar los valores. Con el registrador de curvas se pueden visualizar los cursos de las curvas en el entorno de parametrización.
Reutilización de un ejemplo
Puede reutilizar el código de los ejemplos directamente como programa de usuario, no obstante, los ejemplos no están optimizados para un proceso real.
6.2 FB 58 "TCONT_CP": ejemplo (regulación de impulsos)
El ejemplo "Regulador de temperatura" contiene un lazo de regulación sencillo con el regulador de temperatura FB 58 "TCONT_CP" y un proceso de temperatura simulado con PROC_P. El regulador está parametrizado como regulador de impulsos. PROC_P representa un elemento VZ3 con entrada binaria.
La siguiente figura muestra el lazo de regulación del ejemplo:
TCONT_CP,DB_TCONT_CP
PROC_P,DB_PROC_P
OUTVSP QPULSE
PV
HEAT_P
Estructura del programa
El bloque del regulador y el bloque del proceso se llaman en el OB 35 con un tiempo de ciclo de alarma cíclica de 20 ms. La unidad reguladora más lenta trabaja con CYCLE = 400 ms. Por motivos de precisión, se ha seleccionado PER_TM > CYCLE (1 s).
Durante el rearranque completo del OB 100, se activan los bits de rearranque del regulador y el proceso.
En el OB 100 se activa el generador de impulsos para el regulador.

Reguladores de temperatura: ejemplos
PID Temperature Control A5E00125041-02 6-3
Bloque de proceso para la simulación de una zona de calentamiento de temperatura
El bloque simula un proceso de temperatura típico de calentamiento tal como puede ponerse en práctica ya sea como zona de regulación en un extrusor, una máquina para moldear por inyección o una máquina para la maleabilización, ya sea como horno separado.
La siguiente figura contiene el diagrama de bloques del proceso de regulación PROC_P:
TM_LAG2 TM_LAG3
GAIN
1000 OUTV
DISVHEAT_P
AMB_TEM
TM_LAG1
+ +
Parámetros
Parámetro Comentario Descripción
HEAT_P Heating pulse Señal de entrada binaria Calentar
DISV Disturbance variable Magnitud perturbadora
GAIN Process gain Ganancia del proceso
TM_LAG1 Time lag 1 Tiempo de retardo 1
TM_LAG2 Time lag 2 Tiempo de retardo 2
TM_LAG3 Time lag 3 Tiempo de retardo 3
AMB_TEM Ambient temperature Temperatura ambiente
OUTV Output variable Magnitud de salida (p. ej. temperatura de la zona de regulación)
Las señales de entrada binarias se transforman en valores de coma flotante continuos (0 ó 100). Tras la aplicación de la magnitud perturbadora y la multiplicación por la ganancia del proceso, los valores de proceso se conducen a través de tres elementos de retardo de primer orden. Al final, el valor se añade a la temperatura ambiente. Durante la inicialización COM_RST = TRUE, la magnitud de salida se ajusta a OUTV = DISV*GAIN + AMB_TEM.

Reguladores de temperatura: ejemplos
PID Temperature Control 6-4 A5E00125041-02
Manejo y visualización
En la tabla de variables VAT_LoopControl se puede efectuar el manejo.
La siguiente figura contiene la tabla de variables VAT_LoopControl:
Mediante el interruptor MAN_ON se puede pasar la regulación a modo Manual. El valor manual se puede predeterminar en MAN.
Tras el rearranque completo (en caliente) de la CPU, la regulación se encuentra en modo Manual con la calefacción desconectada.

Reguladores de temperatura: ejemplos
PID Temperature Control A5E00125041-02 6-5
Si desea optimizar la regulación, active el bit TUN_ON e introduzca un valor de consigna en SP. En el parámetro PHASE puede observar el curso de la optimización.
El resultado de la optimización se indica en las palabras de estado STATUS_H y STATUS_D.
Puesta en funcionamiento del ejemplo
Para poner el ejemplo en funcionamiento, proceda del siguiente modo:
1. Copie el ejemplo en una CPU.
2. Ajuste con HW Config el tiempo de ciclo del OB 35 a 20 ms. Si en el nivel de alarmas cíclicas se produce un error de tiempo, deberá ampliar el tiempo de ciclo. En ese caso, la simulación se desarrollará más despacio. Si regula en el proceso real, el tiempo de ciclo del OB 35 y el tiempo de muestreo CYCLE_P o CYCLE del DB_PROC_P deben coincidir.
En la siguiente figura se ilustra la optimización del regulador con el FB 58:
13
Zoom
Valor real
Consigna
Valor real
Valor manipulado
zEs
La figura anterior muestra la optimización del regulador en caso del aumento de la temperatura ambiente 20 °C en el punto de trabajo (70 °C). A continuación se regula un escalón de consigna mediante el modo Zona de regulación. En el nuevo punto de trabajo 90 °C se realiza una nueva optimización del regulador con cambio negativo del valor manipulado.

Reguladores de temperatura: ejemplos
PID Temperature Control 6-6 A5E00125041-02
6.3 Ejemplos del FB 58 "TCONT_CP" con base de tiempo corta
Los dos ejemplos descritos aquí son idénticos al ejemplo "Regulador de impulsos" descrito en el capítulo 6.2. Las únicas diferencias existentes conciernen al mecanismo de llamada descrito a continuación.
El bloque FB 58 "TCONT_CP" contiene un mecanismo que le permite eliminar el procesamiento de la unidad reguladora computacional y la optimización del OB 1 o un OB de alarma cíclica lenta (p. ej. OB 32: 1 s). Este mecanismo se puede utilizar cuando la CPU está sobrecargada y se requiere una gran precisión y, por tanto, la reducción de CYCLE_P a CYCLE.
• El ejemplo "Regulador de impulsos OB 35, OB 1" es idóneo para equipos S7 300, ya que sólo hay disponible un nivel de alarmas cíclicas. En las dos figuras siguientes se representa la llamada del bloque en caso de base de tiempo corta en un S7 300:
OB 1 (freier Zyklus)
U "DB_TCONT_CP".QC_ACTSPBN M001
Call TCONT_CP, DB_TCONT_CP ... SELECT = 1, ...M001: NOP 0
OB 35 ( z. B. 20 ms)
Call TCONT_CP, DB_TCONT_CP ... SELECT = 2, ...
• El ejemplo "Regulador de impulsos OB 35, OB 32" es idóneo para equipos S7 400, ya que hay disponibles varios niveles de alarmas cíclicas. En las dos figuras siguientes se representa la llamada del bloque en caso de base de tiempo corta en un S7 400:
OB 32 (z. B. 1 s)
Call TCONT_CP, DB_TCONT_CP ... SELECT = 3, ...
OB 35 (z. B. 20 ms)
Call TCONT_CP, DB_TCONT_CP ... SELECT = 2, ...

Reguladores de temperatura: ejemplos
PID Temperature Control A5E00125041-02 6-7
6.4 FB 58 "TCONT_CP" (continuo): ejemplo
El ejemplo "Regulador continuo" contiene un lazo de regulación sencillo con el regulador de temperatura FB 58 "TCONT_CP" y un proceso de temperatura simulado con PROC_C. El regulador está parametrizado como regulador continuo. PROC_C representa un elemento VZ3 con entrada analógica.
En la siguiente figura se ilustra el lazo de regulación del ejemplo:
TCONT_CP,DB_TCONT_CP
PROC_C,DB_PROC_C
OUTVSP LMN
PV
INV
Estructura del programa
El bloque del regulador y el bloque del proceso se llaman en el OB 35 con un tiempo de ciclo de alarma cíclica de 100 ms. Durante el rearranque completo del OB 100, se activan los bits de rearranque del regulador y el proceso.
Bloque de proceso para la simulación de una zona de calentamiento de temperatura
El bloque simula un proceso de temperatura típico de calentamiento tal como puede ponerse en práctica ya sea como zona de regulación en un extrusor, una máquina para moldear por inyección o una máquina para la maleabilización, ya sea como horno separado.
En la figura siguiente se representa el diagrama de bloques del proceso de regulación PROC_C:
TM_LAG1 TM_LAG2
DISV GAIN
TM_LAG3
OUTV
AMB_TEM
INV+ +
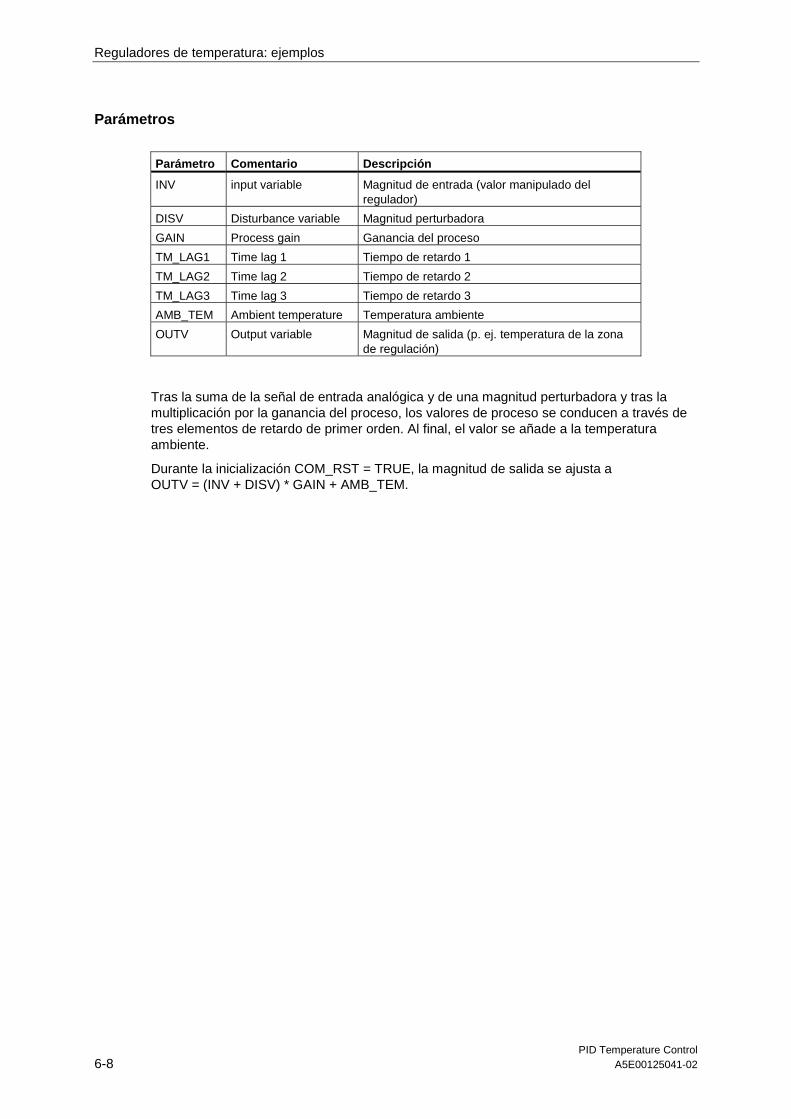
Reguladores de temperatura: ejemplos
PID Temperature Control 6-8 A5E00125041-02
Parámetros
Parámetro Comentario Descripción
INV input variable Magnitud de entrada (valor manipulado del regulador)
DISV Disturbance variable Magnitud perturbadora
GAIN Process gain Ganancia del proceso
TM_LAG1 Time lag 1 Tiempo de retardo 1
TM_LAG2 Time lag 2 Tiempo de retardo 2
TM_LAG3 Time lag 3 Tiempo de retardo 3
AMB_TEM Ambient temperature Temperatura ambiente
OUTV Output variable Magnitud de salida (p. ej. temperatura de la zona de regulación)
Tras la suma de la señal de entrada analógica y de una magnitud perturbadora y tras la multiplicación por la ganancia del proceso, los valores de proceso se conducen a través de tres elementos de retardo de primer orden. Al final, el valor se añade a la temperatura ambiente.
Durante la inicialización COM_RST = TRUE, la magnitud de salida se ajusta a OUTV = (INV + DISV) * GAIN + AMB_TEM.

Reguladores de temperatura: ejemplos
PID Temperature Control A5E00125041-02 6-9
Manejo y visualización
El manejo se realiza en la tabla de variables VAT_LoopControlC:

Reguladores de temperatura: ejemplos
PID Temperature Control 6-10 A5E00125041-02
Mediante el interruptor MAN_ON se puede pasar la regulación a modo Manual. El valor manual se puede predeterminar en MAN. Tras el rearranque completo (en caliente) de la CPU, la regulación se encuentra en modo Manual con la calefacción desconectada.
Si desea optimizar la regulación, active el bit TUN_ON e introduzca un valor de consigna en SP. En el parámetro PHASE puede observar el curso de la optimización.
El resultado de la optimización se indica en las palabras de estado STATUS_H y STATUS_D.
Puesta en funcionamiento del ejemplo
Proceda del siguiente modo para poner el ejemplo en funcionamiento:
1. Copie el ejemplo en una CPU.
2. Si el preajuste del tiempo de ciclo del OB35 (100 ms) ya no está disponible, ajuste el tiempo de ciclo del OB 35 a 100 ms mediante HW Config. Si en el nivel de alarmas cíclicas se produce un error de tiempo, deberá ampliar el tiempo de ciclo. En ese caso, la simulación se desarrollará más despacio. Si regula en el proceso real, el tiempo de ciclo del OB 35 y los tiempos de muestreo CYCLE de DB_TCONT_CP y DB_PROC_C deben coincidir.
3. Para optimizar el regulador, ajuste TUN_DLMN al 20%.
En la siguiente figura se ilustra la optimización del regulador con TCONT_CP:
13
Zoom
Valor real
Consigna
Valor real
Valor manipulado
zEs
La figura anterior muestra la optimización del regulador en caso del aumento de la temperatura ambiente 20 °C en el punto de trabajo (60 °C). A continuación se realiza un escalón de consigna de 60 °C a 85 °C dentro de la zona de regulación. La sobreoscilación se puede eliminar reduciendo PFAC_SP de 0.8 a 0.6.

Reguladores de temperatura: ejemplos
PID Temperature Control A5E00125041-02 6-11
6.5 Ejemplo con FB 59 "TCONT_S" (regulación discontinua)
El ejemplo "Regulador discontinuo" contiene un lazo de regulación sencillo del regulador discontinuo PI y un elemento VZ3 con un actuador de acción I como modelo para un proceso de temperatura.
En la siguiente figura se ilustra el lazo de regulación del ejemplo:
TCONT_S,DB_TCONT_S DB_PROC_s
OUTVSP QLMNUP
PVINV_DOWN
QLMNDN
INV_UPPROC_S,
Estructura del programa
El regulador y el proceso se llaman en el OB 35. Durante el rearranque completo del OB 100, se activan los bits de rearranque del regulador y el proceso.
Bloque de proceso para la simulación de un proceso de temperatura
El bloque simula un proceso con un elemento VZ3. Para procesos de temperatura, seleccione un comportamiento VZ2 con una constante de tiempo grande y otra pequeña (TM_LAG1 = 10 × TM_LAG2 y TM_LAG3 = 0 s).
En la figura siguiente se representa el diagrama de bloques del proceso de regulación PROC_S con actuador:
TM_LAG1 TM_LAG2
DISV GAIN
TM_LAG3
OUTV
MTR_TM LMNR_HLMLMNR_LLM
LMNRQLMNR_HSQLMNR_LS
INV_UP
INV_DOWN
AMB_TEM
++

Reguladores de temperatura: ejemplos
PID Temperature Control 6-12 A5E00125041-02
Parámetros
Parámetro Comentario Descripción
INV_UP input variable up Abrir señal del valor manipulado
INV_DOWN input variable down Cerrar señal del valor manipulado
DISV disturbance variable Magnitud perturbadora
GAIN process gain Ganancia del proceso
MTR_TM motor manipulated value
Tiempo de ejecución del actuador
LMNR_HLM repeated manipulated value high limit
Límite superior del actuador
LMNR_LLM repeated manipulated value low limit
Límite inferior del actuador
TM_LAG1 time lag 1 Tiempo de retardo 1
TM_LAG2 time lag 2 Tiempo de retardo 2 (en procesos de temperatura: TM_LAG1 = 10...100 × TM_LAG2)
TM_LAG3 time lag 3 Tiempo de retardo 3 (= 0 en procesos de temperatura)
AMB_TEM ambient temperature Temperatura ambiente
OUTV output variable Magnitud de salida (p. ej. temperatura)
LMNR repeated manipulated value
Realimentación de posición
QLMNR_HS high limit signal of repeated manipulated value
Señal tope de límite superior
QLMNR_LS low limit signal of repeated manipulated value
Señal tope de límite inferior
Dependiendo de las señales de entrada INV_UP e INV_DOWN, la realimentación de posición LMNR se calcula mediante un integrador. La realimentación de posición está limitada a LMNR_HLM y LMNR_LLM. Si se alcanza cualquiera de los límites, se activan las señales tope QLMNR_HS o QLMNR_LS.
Tras la aplicación de la magnitud perturbadora y la multiplicación por la ganancia del proceso, los valores de proceso se conducen a través de tres elementos de retardo de primer orden.
Durante la inicialización COM_RST = TRUE, la magnitud de salida se ajusta a OUTV = (LMNR + DISV)*GAIN + AMB_TEM.

Reguladores de temperatura: ejemplos
PID Temperature Control A5E00125041-02 6-13
Manejo y visualización
El manejo se realiza en la tabla de variables VAT_LoopControlS:
Mediante el interruptor LMNS_ON se puede pasar la regulación a modo Manual. Tras el rearranque completo (en caliente) de la CPU, la regulación se encuentra en modo Manual. Si LMNS_ON está activado, en las entradas LMNUP o LMNDN se pueden controlar las salidas QLMNUP o QLMNDN en modo Manual.

Reguladores de temperatura: ejemplos
PID Temperature Control 6-14 A5E00125041-02
Puesta en funcionamiento del ejemplo
Proceda del siguiente modo para poner el ejemplo en funcionamiento:
1. Copie el ejemplo en una CPU.
2. Ajuste con HW Config el tiempo de ciclo del OB 35 a 20 ms. Si en el nivel de alarmas cíclicas se produce un error de tiempo, deberá ampliar el tiempo de ciclo. En ese caso, la simulación se desarrollará más despacio. Si regula en el proceso real, el tiempo de ciclo del OB 35 y el tiempo de muestreo del FB 59 "TCONT_S" deben coincidir.
En la siguiente figura se ilustra la optimización del regulador con TCONT_S:
13
Zoom
Valor real
Consigna
Valor real
Valor manipulado
zEs
La siguiente figura muestra un escalón de consigna de 20 °C a 36 °C. No se alcanza el límite de valor manipulado; la temperatura oscila alrededor de 5 °C aprox. (30 %). Durante el siguiente escalón de consigna de 36 °C a 70 °C se alcanza el límite manipulado superior. De este modo se evita la sobreoscilación del valor real.
Si también desea evitar la sobreoscilación en caso de escalones de consigna pequeños, deberá reducir PFAC_SP (p. ej. de 1.0 a 0.8).
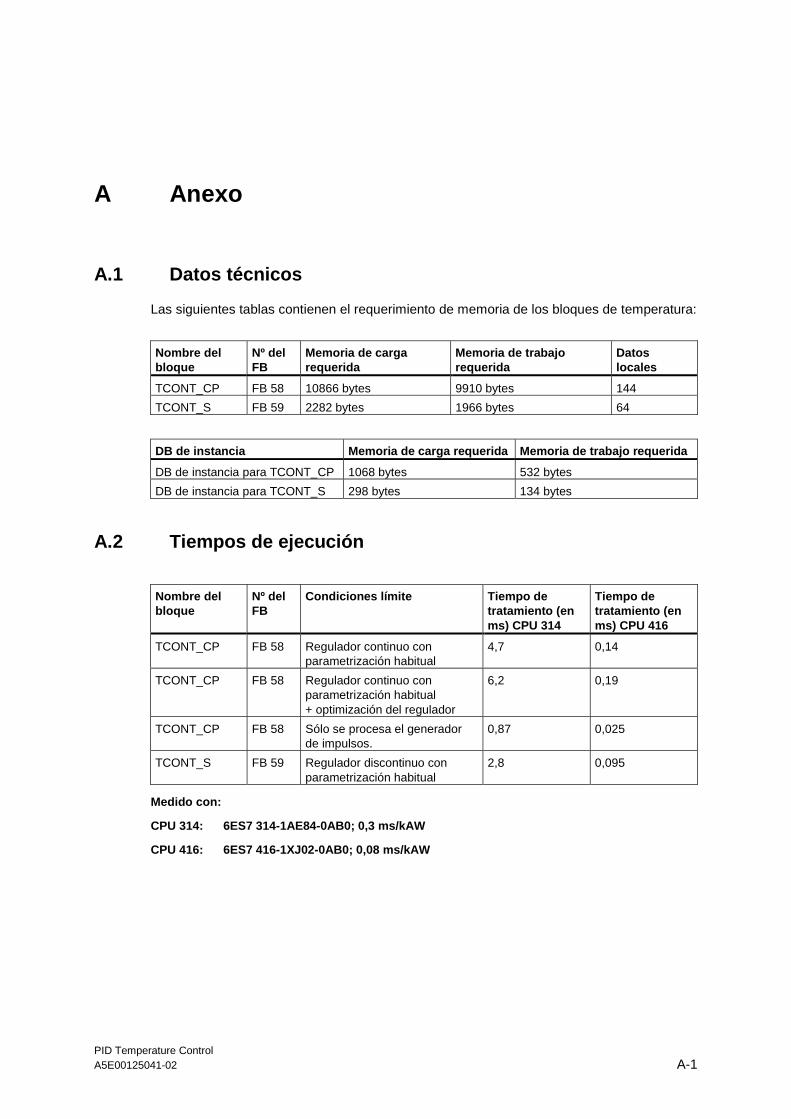
PID Temperature Control A5E00125041-02 A-1
A Anexo
A.1 Datos técnicos
Las siguientes tablas contienen el requerimiento de memoria de los bloques de temperatura:
Nombre del bloque
Nº del FB
Memoria de carga requerida
Memoria de trabajo requerida
Datos locales
TCONT_CP FB 58 10866 bytes 9910 bytes 144
TCONT_S FB 59 2282 bytes 1966 bytes 64
DB de instancia Memoria de carga requerida Memoria de trabajo requerida
DB de instancia para TCONT_CP 1068 bytes 532 bytes
DB de instancia para TCONT_S 298 bytes 134 bytes
A.2 Tiempos de ejecución
Nombre del bloque
Nº del FB
Condiciones límite Tiempo de tratamiento (en ms) CPU 314
Tiempo de tratamiento (en ms) CPU 416
TCONT_CP FB 58 Regulador continuo con parametrización habitual
4,7 0,14
TCONT_CP FB 58 Regulador continuo con parametrización habitual + optimización del regulador
6,2 0,19
TCONT_CP FB 58 Sólo se procesa el generador de impulsos.
0,87 0,025
TCONT_S FB 59 Regulador discontinuo con parametrización habitual
2,8 0,095
Medido con:
CPU 314: 6ES7 314-1AE84-0AB0; 0,3 ms/kAW
CPU 416: 6ES7 416-1XJ02-0AB0; 0,08 ms/kAW

Anexo
PID Temperature Control A-2 A5E00125041-02
A.3 Ocupación de DB
A.3.1 DB de instancia para el FB 58 "TCONT_CP"
Parámetros:
Direc. Parámetro Declarac
ión Tipo de datos
Rango de valores
Valor inicial
Descripción
0.0 PV_IN INPUT REAL En función de los sensores utilizados.
0.0 PROCESS VARIABLE IN/ Entrada de valor real En la entrada "Entrada de valor real" se puede parametrizar un valor de puesta en servicio, o se puede conectar un valor real externo en coma flotante.
4.0 PV_PER INPUT INT 0 PROCESS VARIABLE PERIPHERY/ Valor real de periferia El valor real en formato de periferia se conecta al regulador a través de la entrada "Valor real de periferia".
6.0 DISV INPUT REAL 0.0 DISTURBANCE VARIABLE/ Magnitud perturbadora Para realizar un control anticipativo de la magnitud perturbadora, ésta se conecta a la entrada "Magnitud perturbadora".
10.0 INT_HPOS INPUT BOOL FALSE INTEGRAL ACTION HOLD IN POSITIVE DIRECTION/ Congelar acción I en sentido positivo
La salida del integrador se puede bloquear en sentido positivo. Para ello, la entrada INT_HPOS debe estar ajustada a TRUE. En caso de regulación en cascada, se conecta INT_HPOS del regulador piloto a QLMN_HLM del regulador secuencial.
10.1 INT_HNEG INPUT BOOL FALSE INTEGRAL ACTION HOLD IN NEGATIVE DIRECTION/ Congelar acción I en sentido negativo La salida del integrador se puede bloquear en sentido negativo. Para ello, la entrada INT_HNEG debe estar ajustada a TRUE. En caso de regulación en cascada, se interconecta INT_HNEG del regulador piloto con QLMN_LLM del regulador secuencial.

Anexo
PID Temperature Control A5E00125041-02 A-3
Direc. Parámetro Declaración
Tipo de datos
Rango de valores
Valor inicial
Descripción
12.0 SELECT INPUT INT 0 a 3 0 SELECTION OF CALL PID AND PULSE GENERATOR/ Selección del comportamiento de llamada de PID y el generador de impulsos Si el generador de impulsos está conectado, existen varias posibilidades de llamar el algoritmo PID y el generador de impulsos: • SELECT = 0: El regulador se llama en
un nivel de alarmas cíclicas rápido y se procesan el algoritmo PID y el generador de impulsos.
• SELECT = 1: El regulador se llama en el OB1 y sólo se procesa el algoritmo PID.
• SELECT =2: El regulador se llama en un nivel de alarmas cíclicas rápido y sólo se procesa el generador de impulsos.
• SELECT =3: El regulador se llama en un nivel de alarmas cíclicas lento y sólo se procesa el algoritmo PID.
14.0 PV OUTPUT REAL En función de los sensores utilizados.
0.0 PROCESS VARIABLE/ Valor real En la salida "Valor real" se emite el valor real que actúa realmente.
18.0 LMN OUTPUT REAL 0.0 MANIPULATED VARIABLE/ Valor manipulado En la salida "Valor manipulado" se emite en formato de coma flotante el valor manipulado que actúa realmente.
22.0 LMN_PER OUTPUT INT 0 MANIPULATED VARIABLE PERIPHERY/ Valor manipulado de periferia El valor manipulado en formato de periferia se conecta al regulador en la salida "Valor manipulado de periferia".
24.0 QPULSE OUTPUT BOOL FALSE QUTPUT PULSE SIGNAL/ Salida de impulsos El valor manipulado se emite con modulación de ancho de pulso en la salida QPULSE.
24.1 QLMN_ HLM
OUTPUT BOOL FALSE HIGH LIMIT OF MANIPULATED VARIABLE REACHED/ Límite superior del valor manipulado alcanzado El valor manipulado está limitado siempre a un límite superior e inferior. La salida QLMN_HLM señala si se sobrepasa el límite superior.
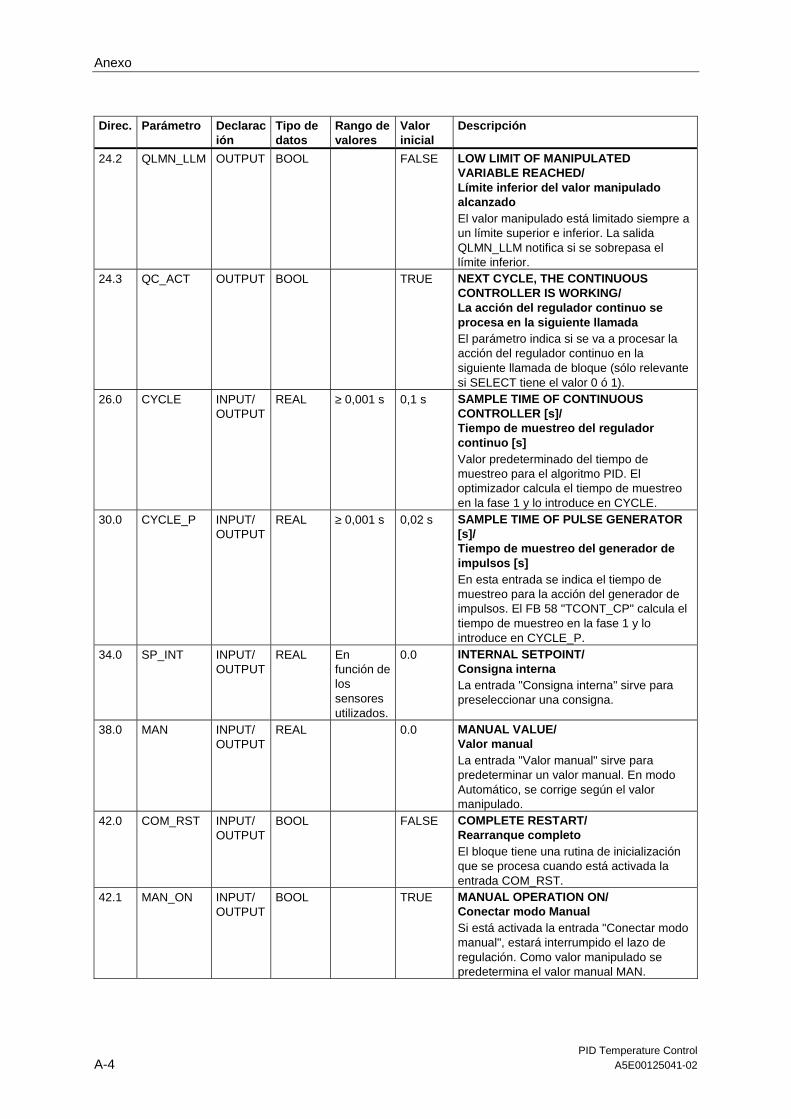
Anexo
PID Temperature Control A-4 A5E00125041-02
Direc. Parámetro Declaración
Tipo de datos
Rango de valores
Valor inicial
Descripción
24.2 QLMN_LLM OUTPUT BOOL FALSE LOW LIMIT OF MANIPULATED VARIABLE REACHED/ Límite inferior del valor manipulado alcanzado El valor manipulado está limitado siempre a un límite superior e inferior. La salida QLMN_LLM notifica si se sobrepasa el límite inferior.
24.3 QC_ACT OUTPUT BOOL TRUE NEXT CYCLE, THE CONTINUOUS CONTROLLER IS WORKING/ La acción del regulador continuo se procesa en la siguiente llamada El parámetro indica si se va a procesar la acción del regulador continuo en la siguiente llamada de bloque (sólo relevante si SELECT tiene el valor 0 ó 1).
26.0 CYCLE INPUT/ OUTPUT
REAL ≥ 0,001 s 0,1 s SAMPLE TIME OF CONTINUOUS CONTROLLER [s]/ Tiempo de muestreo del regulador continuo [s] Valor predeterminado del tiempo de muestreo para el algoritmo PID. El optimizador calcula el tiempo de muestreo en la fase 1 y lo introduce en CYCLE.
30.0 CYCLE_P INPUT/ OUTPUT
REAL ≥ 0,001 s 0,02 s SAMPLE TIME OF PULSE GENERATOR [s]/ Tiempo de muestreo del generador de impulsos [s] En esta entrada se indica el tiempo de muestreo para la acción del generador de impulsos. El FB 58 "TCONT_CP" calcula el tiempo de muestreo en la fase 1 y lo introduce en CYCLE_P.
34.0 SP_INT INPUT/ OUTPUT
REAL En función de los sensores utilizados.
0.0 INTERNAL SETPOINT/ Consigna interna La entrada "Consigna interna" sirve para preseleccionar una consigna.
38.0 MAN INPUT/ OUTPUT
REAL 0.0 MANUAL VALUE/ Valor manual La entrada "Valor manual" sirve para predeterminar un valor manual. En modo Automático, se corrige según el valor manipulado.
42.0 COM_RST INPUT/ OUTPUT
BOOL FALSE COMPLETE RESTART/ Rearranque completo El bloque tiene una rutina de inicialización que se procesa cuando está activada la entrada COM_RST.
42.1 MAN_ON INPUT/ OUTPUT
BOOL TRUE MANUAL OPERATION ON/ Conectar modo Manual Si está activada la entrada "Conectar modo manual", estará interrumpido el lazo de regulación. Como valor manipulado se predetermina el valor manual MAN.

Anexo
PID Temperature Control A5E00125041-02 A-5
Parámetros internos
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
44.0 DEADB_W INPUT
REAL
En función de los sensores utilizados.
0.0 DEAD BAND WIDTH/ Ancho de zona muerta
El error de regulación se conduce por una zona muerta. La entrada "Ancho de zona muerta" determina el tamaño de la zona muerta.
48.0 I_ITLVAL INPUT REAL 0 a 100 % 0.0 INITIALIZATION VALUE OF THE INTEGRAL ACTION/ Valor de inicialización de la acción I
La salida del integrador se puede activar en la entrada I_ITL_ON. En la entrada "Valor de inicialización de la acción I" se encuentra el valor de inicialización. Durante el rearranque completo COM_RST = TRUE, la acción I se ajusta al valor de incialización.
52.0 LMN_HLM INPUT REAL > LMN_ LLM
100.0 MANIPULATED VARIABLE HIGH LIMIT/ Límite superior del valor manipulado
El valor manipulado está limitado siempre a un límite superior e inferior. La entrada "Límite superior del valor manipulado" indica el límite superior.
56.0 LMN_LLM INPUT REAL < LMN_ HLM
0.0 MANIPULATED VARIABLE LOW LIMIT/ Límite inferior del valor manipulado
El valor manipulado está limitado siempre a un límite superior e inferior. La entrada "Límite inferior del valor manipulado" indica el límite inferior.
60.0 PV_FAC INPUT REAL 1.0 PROCESS VARIABLE FACTOR/ Factor de valor real
La entrada "Factor de valor real" se multiplica por "Valor real de periferia". La entrada sirve para adaptar el rango del valor real.
64.0 PV_OFFS INPUT REAL 0.0 PROCESS VARIABLE OFFSET/ Offset de valor real
La entrada "Offset de valor real" se suma a "Valor real de periferia". La entrada sirve para adaptar el rango del valor real.
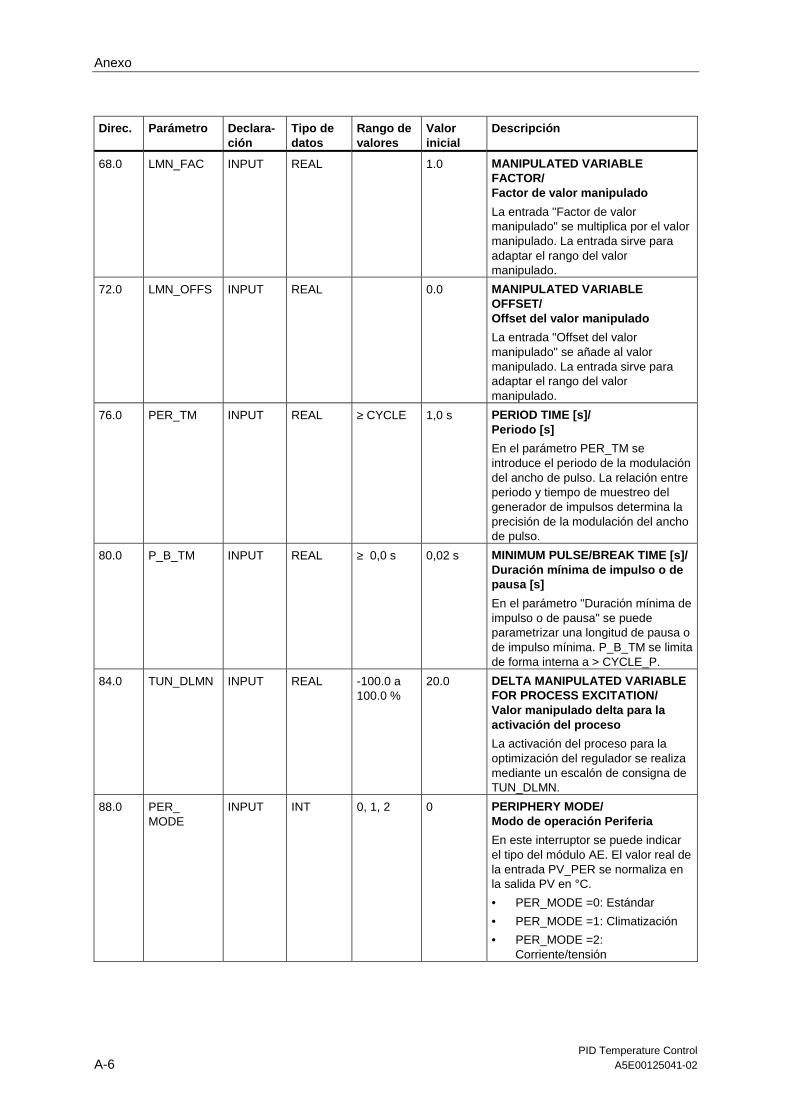
Anexo
PID Temperature Control A-6 A5E00125041-02
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
68.0 LMN_FAC INPUT REAL 1.0 MANIPULATED VARIABLE FACTOR/ Factor de valor manipulado
La entrada "Factor de valor manipulado" se multiplica por el valor manipulado. La entrada sirve para adaptar el rango del valor manipulado.
72.0 LMN_OFFS INPUT REAL 0.0 MANIPULATED VARIABLE OFFSET/ Offset del valor manipulado
La entrada "Offset del valor manipulado" se añade al valor manipulado. La entrada sirve para adaptar el rango del valor manipulado.
76.0 PER_TM INPUT REAL ≥ CYCLE 1,0 s PERIOD TIME [s]/ Periodo [s]
En el parámetro PER_TM se introduce el periodo de la modulación del ancho de pulso. La relación entre periodo y tiempo de muestreo del generador de impulsos determina la precisión de la modulación del ancho de pulso.
80.0 P_B_TM INPUT REAL ≥ 0,0 s 0,02 s MINIMUM PULSE/BREAK TIME [s]/ Duración mínima de impulso o de pausa [s]
En el parámetro "Duración mínima de impulso o de pausa" se puede parametrizar una longitud de pausa o de impulso mínima. P_B_TM se limita de forma interna a > CYCLE_P.
84.0 TUN_DLMN INPUT REAL -100.0 a 100.0 %
20.0 DELTA MANIPULATED VARIABLE FOR PROCESS EXCITATION/ Valor manipulado delta para la activación del proceso
La activación del proceso para la optimización del regulador se realiza mediante un escalón de consigna de TUN_DLMN.
88.0 PER_ MODE
INPUT INT 0, 1, 2 0 PERIPHERY MODE/ Modo de operación Periferia
En este interruptor se puede indicar el tipo del módulo AE. El valor real de la entrada PV_PER se normaliza en la salida PV en °C.
• PER_MODE =0: Estándar
• PER_MODE =1: Climatización
• PER_MODE =2: Corriente/tensión

Anexo
PID Temperature Control A5E00125041-02 A-7
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
90.0 PVPER_ON INPUT BOOL FALSE PROCESS VARIABLE PERIPHERY ON/ Conectar valor real de periferia
Si se debe acceder al valor real de la periferia, la entrada PV_PER debe estar conectada a la periferia, y la entrada "Conectar valor real de periferia" debe estar activada.
90.1 I_ITL_ON INPUT BOOL FALSE INITIALIZATION OF THE INTEGRAL ACTION ON/ Inicializar acción I
La salida del integrador se puede ajustar a la entrada I_ITLVAL. Para ello debe estar activada la entrada "Inicializar acción I".
90.2 PULSE_ON INPUT BOOL FALSE PULSE GENERATOR ON/ Conectar generador de impulsos
Con PULSE_ON = TRUE se activa el generador de impulsos.
90.3 TUN_KEEP INPUT BOOL FALSE KEEP TUNING ON/ Mantener modo Optimización
No se pasa al modo Automático hasta que TUN_KEEP sea FALSE.
92.0 ER OUTPUT REAL En función de los sensores utilizados.
0.0 ERROR SIGNAL/ Error de regulación
En la salida "Error de regulación" se emite el error de regulación que actúa realmente.
96.0 LMN_P OUTPUT REAL 0.0 PROPORTIONALITY COMPONENT/ Acción P
La salida "Acción P" contiene la componente proporcional de la magnitud manipulada.
100.0 LMN_I OUTPUT REAL 0.0 INTEGRAL COMPONENT/ Acción I
La salida "Acción I" contiene la componente integral de la magnitud manipulada.
104.0 LMN_D OUTPUT REAL 0.0 DERIVATIVE COMPONENT/ Acción D
La salida "Acción D" contiene la componente derivativa de la magnitud manipulada.
108.0 PHASE OUTPUT INT 0, 1, 2, 3, 4, 5, 7
0 PHASE OF SELF TUNING/ Indicación de la fase de la optimización del regulador
En la salida PHASE se indica la fase de ejecución actual de la optimización del regulador (0..7).

Anexo
PID Temperature Control A-8 A5E00125041-02
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
110.0 STATUS_H OUTPUT INT 0 STATUS HEATING OF SELF TUNING/ Estado "Calentar" de la optimización del regulador
STATUS_H indica un valor de diagnóstico a través de la búsqueda del punto de inversión en el proceso de calentamiento.
112.0 STATUS_D OUTPUT INT 0 STATUS CONTROLLER DESIGN OF SELF TUNING/ Estado "Diseño" de la optimización del regulador
STATUS_D indica un valor de diagnóstico a través del diseño del regulador durante el proceso de calentamiento.
114.0 QTUN_ RUN
OUTPUT BOOL 0 TUNING IS ACTIVE (PHASE 2)/ Optimización en curso (fase 2)
La optimización se ha iniciado mediante la aplicación de la magnitud manipulada de optimización y en estos momentos se encuentra en la fase 2 (búsqueda del punto de inversión).
116.0 PI_CON OUTPUT STRUCT PI CONTROLLER PARAMETERS/ Parámetros PI del regulador
+0.0 GAIN OUTPUT REAL %/unidadfísica
0.0 PI PROPORTIONAL GAIN/ Ganancia del regulador PI
+4.0 TI OUTPUT REAL ≥ 0,0 s 0,0 s PI RESET TIME [s]/ Tiempo de acción integral PI [s]
124.0 PID_CON OUTPUT STRUCT PID CONTROLLER PARAMETERS/ Parámetros PID del regulador
+0.0
GAIN OUTPUT REAL 0.0 PID PROPORTIONAL GAIN/ Ganancia del regulador PID
+4.0 TI OUTPUT REAL ≥ 0,0 s 0,0 s PID RESET TIME [s]/ Tiempo de acción integral PID [s]
+8.0 TD OUTPUT REAL ≥ 0,0 s 0,0 s PID DERIVATIVE TIME [s]/ Tiempo de acción derivativa PID [s]
136.0 PAR_SAVE OUTPUT STRUCT SAVED CONTROLLER PARAMETERS/ Parámetros PID guardados del regulador
En esta estructura se guardan los parámetros PID.
+0.0
PFAC_SP INPUT/ OUTPUT
REAL 0.0 a 1.0 1.0 PROPORTIONAL FACTOR FOR SETPOINT CHANGES/ Ganancia proporcional al cambiar el valor de consigna
+4.0
GAIN OUTPUT REAL %/unidadfísica
0.0 PROPORTIONAL GAIN/ Ganancia del regulador

Anexo
PID Temperature Control A5E00125041-02 A-9
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
+8.0 TI INPUT/ OUTPUT
REAL ≥ 0,0 s 40,0 s RESET TIME [s]/ Tiempo de acción integral [s]
+12.0 TD INPUT/ OUTPUT
REAL ≥ 0,0 s 10,0 s DERIVATIVE TIME [s]/ Tiempo de acción derivativa [s]
+16.0
D_F OUTPUT REAL 5.0 a 10.0 5.0 DERIVATIVE FACTOR/ Factor de acción derivativa
+20.0 CON_ ZONE
OUTPUT REAL ≥ 0.0 100.0 CONTROL ZONE ON/ Conectar zona de regulación
+24.0 CONZ_ON OUTPUT BOOL FALSE CONTROL ZONE/ Ancho de zona de regulación
162.0 PFAC_SP INPUT/ OUTPUT
REAL 0.0 a 1.0 1.0 PROPORTIONAL FACTOR FOR SETPOINT CHANGES/ Ganancia proporcional al cambiar el valor de consigna
PFAC_SP indica la acción P efectiva en caso de modificación del valor de consigna. Se ajusta entre 0 y 1.
• 1: la acción P también está completamente operativa en caso de modificaciones del valor de consigna.
• 0: la acción P no está operativa en caso de modificaciones del valor de consigna.
166.0 GAIN INPUT/ OUTPUT
REAL %/unidad física
2.0 PROPORTIONAL GAIN/ Ganancia del regulador
La entrada "Ganancia proporcional" indica la ganancia del regulador. El sentido de actuación del regulador se invierte mediante el signo negativo de GAIN.
170.0 TI INPUT/ OUTPUT
REAL ≥ 0,0 s 40,0 s RESET TIME [s]/ Tiempo de acción integral [s]
La entrada "Tiempo de acción integral" determina el comportamiento temporal del integrador.
174.0 TD INPUT/ OUTPUT
REAL ≥ 0,0 s 10,0 s DERIVATIVE TIME [s]/ Tiempo de acción derivativa [s]
La entrada "Tiempo de acción derivativa" determina el comportamiento temporal del diferenciador.
178.0 D_F INPUT/ OUTPUT
REAL 5.0 a 10.0 5.0 DERIVATIVE FACTOR/ Factor de acción derivativa
El factor de acción derivativa determina el retardo de la acción D.
• D_F = Tiempo de acción derivativa/ "Retardo de la acción D"

Anexo
PID Temperature Control A-10 A5E00125041-02
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
182.0 CON_ ZONE
INPUT/ OUTPUT
REAL En función de los sensores utilizados.
100.0 CONTROL ZONE/ Ancho de zona de regulación
Si el error de regulación es mayor que el ancho de zona de regulación, se emite el límite superior del valor manipulado como valor manipulado.
Si el error de regulación es menor que el ancho negativo de zona de regulación, se emite el límite inferior del valor manipulado como valor manipulado.
186.0 CONZ_ON INPUT/ OUTPUT
BOOL FALSE CONTROL ZONE ON/ Conectar zona de regulación
Con CONZ_ON =TRUE se puede activar la zona de regulación.
186.1 TUN_ON INPUT/ OUTPUT
BOOL FALSE SELF TUNING ON/ Conectar optimización del regulador
Si TUN_ON=TRUE, se toma el promedio del valor manipulado hasta que se aplica el cambio del valor manipulado TUN_DLMN mediante un escalón de consigna o TUN_ST=TRUE.
186.2 TUN_ST INPUT/ OUTPUT
BOOL FALSE START SELF TUNING/ Iniciar optimización del regulador
Si el valor de consigna debe permanecer constante durante la optimización del regulador en el punto de trabajo, se aplica un escalón de consigna a TUN_DLMN mediante TUN_ST=1.
186.3 UNDO_ PAR
INPUT/ OUTPUT
BOOL FALSE UNDO CHANGE OF CONTROLLER PARAMETERS/ Deshacer la modificación de los parámetros del regulador
Carga los parámetros del regulador PFAC_SP, GAIN, TI, TD, D_F CONZ_ON y CON_ZONE desde la estructura de datos PAR_SAVE (sólo en modo Manual).
186.4 SAVE_PAR INPUT/ OUTPUT
BOOL FALSE SAVE CURRENT CONTROLLER PARAMETERS/ Guardar parámetros actuales del regulador
Guarda los parámetros del regulador PFAC_SP, GAIN, TI, TD, D_F, CONZ_ON y CON_ZONE en la estructura de datos PAR_SAVE.
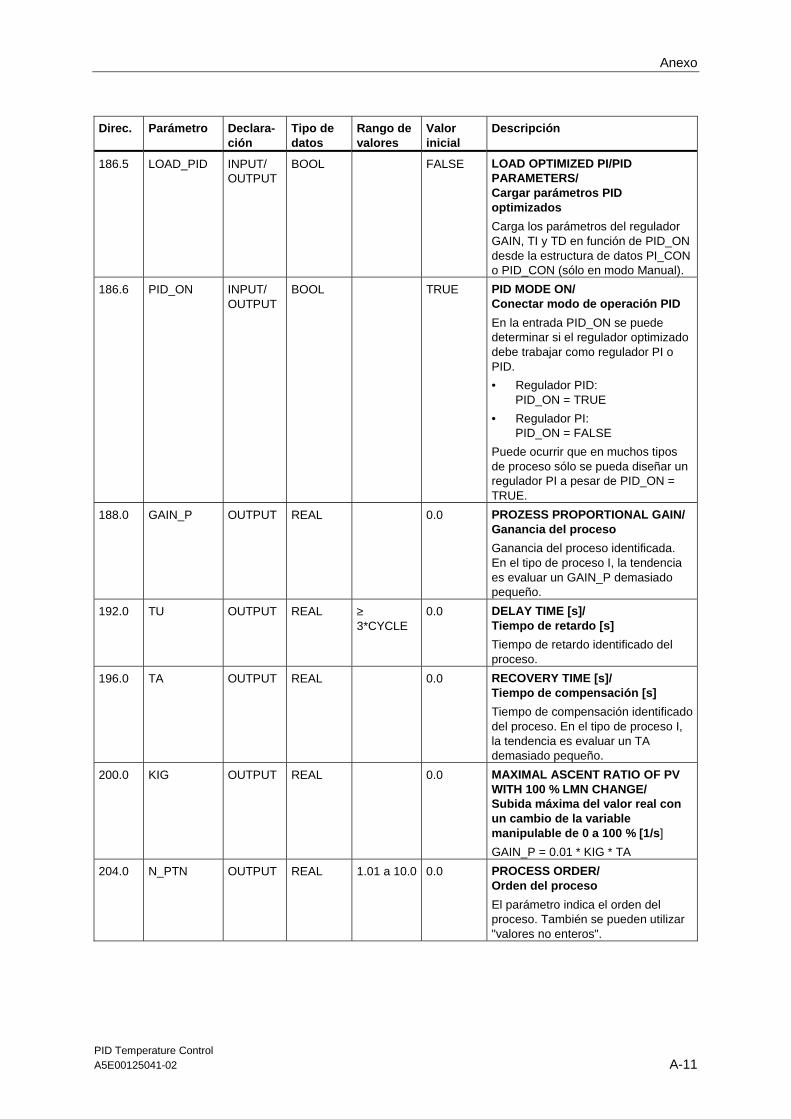
Anexo
PID Temperature Control A5E00125041-02 A-11
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
186.5 LOAD_PID INPUT/ OUTPUT
BOOL FALSE LOAD OPTIMIZED PI/PID PARAMETERS/ Cargar parámetros PID optimizados
Carga los parámetros del regulador GAIN, TI y TD en función de PID_ON desde la estructura de datos PI_CON o PID_CON (sólo en modo Manual).
186.6 PID_ON INPUT/ OUTPUT
BOOL TRUE PID MODE ON/ Conectar modo de operación PID
En la entrada PID_ON se puede determinar si el regulador optimizado debe trabajar como regulador PI o PID.
• Regulador PID: PID_ON = TRUE
• Regulador PI: PID_ON = FALSE
Puede ocurrir que en muchos tipos de proceso sólo se pueda diseñar un regulador PI a pesar de PID_ON = TRUE.
188.0 GAIN_P OUTPUT REAL 0.0 PROZESS PROPORTIONAL GAIN/ Ganancia del proceso
Ganancia del proceso identificada. En el tipo de proceso I, la tendencia es evaluar un GAIN_P demasiado pequeño.
192.0 TU OUTPUT REAL ≥ 3*CYCLE
0.0 DELAY TIME [s]/ Tiempo de retardo [s]
Tiempo de retardo identificado del proceso.
196.0 TA OUTPUT REAL 0.0 RECOVERY TIME [s]/ Tiempo de compensación [s]
Tiempo de compensación identificado del proceso. En el tipo de proceso I, la tendencia es evaluar un TA demasiado pequeño.
200.0 KIG OUTPUT REAL 0.0 MAXIMAL ASCENT RATIO OF PV WITH 100 % LMN CHANGE/ Subida máxima del valor real con un cambio de la variable manipulable de 0 a 100 % [1/s]
GAIN_P = 0.01 * KIG * TA
204.0 N_PTN OUTPUT REAL 1.01 a 10.0 0.0 PROCESS ORDER/ Orden del proceso
El parámetro indica el orden del proceso. También se pueden utilizar "valores no enteros".

Anexo
PID Temperature Control A-12 A5E00125041-02
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
208.0 TM_LAG_P OUTPUT REAL 0.0 TIME LAG OF PTN MODEL [s]/ Constante temporal de un modelo PTN [s]
Constante temporal de un modelo PTN (valores significativos sólo para N_PTN >= 2).
212.0 T_P_INF OUTPUT REAL 0.0 TIME TO POINT OF INFLECTION [s]/ Tiempo hasta el punto de inversión [s]
fTiempo desde la activación del proceso hasta el punto de inversión
216.0 P_INF OUTPUT REAL En función de los sensores utilizados.
0.0 PV AT POINT OF INFLECTION - PV0/ Valor real en el punto de inversión – PV0
Modificación del valor real desde la activación del proceso hasta el punto de inversión.
220.0 LMN0 OUTPUT REAL 0 a 100 % 0.0 MANIPULATED VAR. AT BEGIN OF TUNING/ Valor manipulado al principio de la optimización
Se calcula en la fase 1 (valor medio).
224.0 PV0 OUTPUT REAL En función de los sensores utilizados.
0.0 PROCESS VALUE AT BEGIN OF TUNING/ Valor real al principio de la optimización
228.0 PVDT0 OUTPUT REAL 0.0 RATE OF CHANGE OF PV AT BEGIN OF TUNING [1/s]/ Subida del valor real al iniciar la optimización [1/s]
Con adaptación de signo.
232.0 PVDT OUTPUT REAL 0.0 CURRENT RATE OF CHANGE OF PV [1/s]/ Subida momentánea del valor real [1/s]
Con adaptación de signo.
236.0 PVDT_MAX OUTPUT REAL 0.0 MAX. RATE OF CHANGE OF PV PER SECOND [1/s]/ Modificación máx. del valor real por segundo [1/s]
Derivación máxima del valor real en el punto de inversión (con adaptación de signo, siempre > 0); se utiliza para calcular TU y KIG.
240.0 NOI_PVDT OUTPUT REAL 0.0 RATIO OF NOISE IN PVDT_MAX IN %/ Nivel de ruido en PVDT_MAX en %
Cuanto mayor sea el nivel de ruido, menos precisos (de efecto más suave) serán los parámetros del regulador.

Anexo
PID Temperature Control A5E00125041-02 A-13
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
244.0 NOISE_PV OUTPUT REAL 0.0 ABSOLUTE NOISE IN PV/ Ruido absoluto en el valor real
Diferencia entre el valor real máximo y mínimo en la fase 1.
248.0 FIL_CYC OUTPUT INT 1 ... 1024 1 NO OF CYCLES FOR MEAN-VALUE FILTER/ Número de ciclos del filtro de valores medios
Se toma el promedio del valor real a través de ciclos FIL_CYC. En caso necesario, FIL_CYC se aumenta automáticamente de 1 a 1024 como máximo.
250.0 POI_CMAX OUTPUT INT 2 MAX NO OF CYCLES AFTER POINT OF INFLECTION/ Número máximo de ciclos tras el punto de inversión
Este tiempo se utiliza para encontrar otro punto de inversión (es decir, un punto de inversión mejor) en caso de ruidos de medición. Sólo entonces concluye la optimización.
252.0 POI_CYCL OUTPUT INT 0 NUMBER OF CYCLES AFTER POINT OF INFLECTION/ Número de ciclos tras el punto de inversión
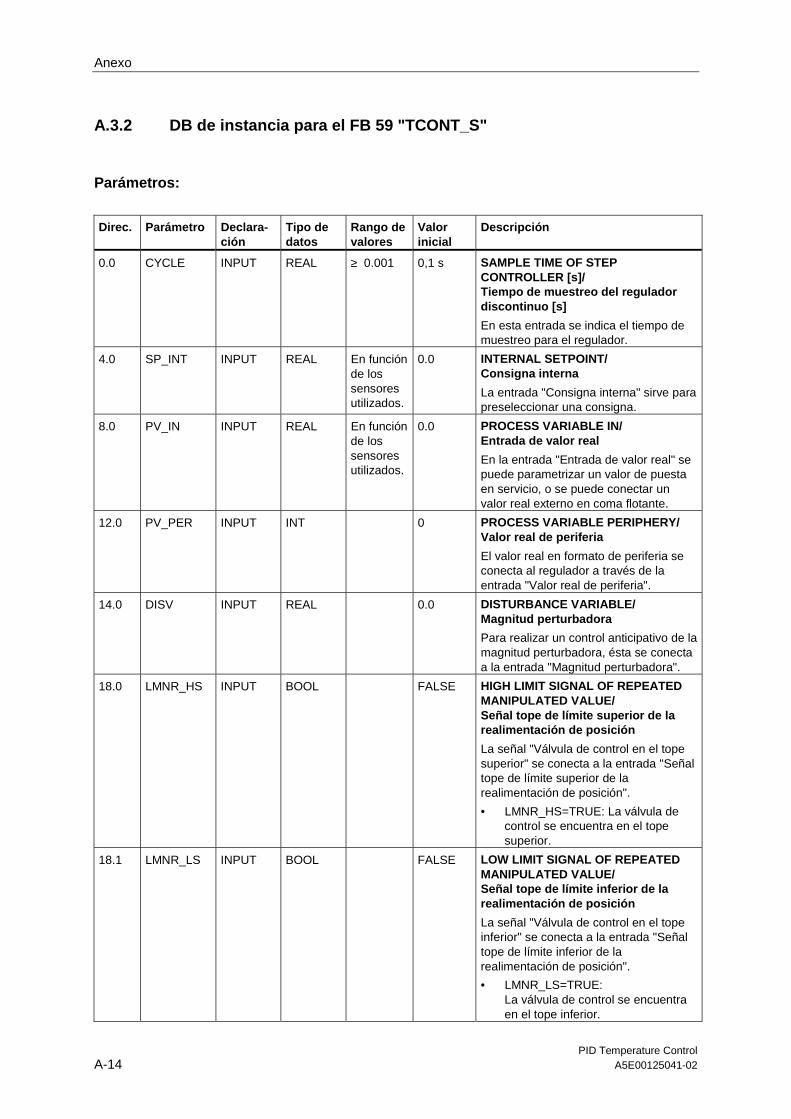
Anexo
PID Temperature Control A-14 A5E00125041-02
A.3.2 DB de instancia para el FB 59 "TCONT_S"
Parámetros:
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
0.0 CYCLE INPUT REAL ≥ 0.001 0,1 s SAMPLE TIME OF STEP CONTROLLER [s]/ Tiempo de muestreo del regulador discontinuo [s]
En esta entrada se indica el tiempo de muestreo para el regulador.
4.0 SP_INT INPUT REAL En función de los sensores utilizados.
0.0 INTERNAL SETPOINT/ Consigna interna
La entrada "Consigna interna" sirve para preseleccionar una consigna.
8.0 PV_IN INPUT REAL En función de los sensores utilizados.
0.0 PROCESS VARIABLE IN/ Entrada de valor real
En la entrada "Entrada de valor real" se puede parametrizar un valor de puesta en servicio, o se puede conectar un valor real externo en coma flotante.
12.0 PV_PER INPUT INT 0 PROCESS VARIABLE PERIPHERY/ Valor real de periferia
El valor real en formato de periferia se conecta al regulador a través de la entrada "Valor real de periferia".
14.0 DISV INPUT REAL 0.0 DISTURBANCE VARIABLE/ Magnitud perturbadora
Para realizar un control anticipativo de la magnitud perturbadora, ésta se conecta a la entrada "Magnitud perturbadora".
18.0 LMNR_HS INPUT BOOL FALSE HIGH LIMIT SIGNAL OF REPEATED MANIPULATED VALUE/ Señal tope de límite superior de la realimentación de posición
La señal "Válvula de control en el tope superior" se conecta a la entrada "Señal tope de límite superior de la realimentación de posición".
• LMNR_HS=TRUE: La válvula de control se encuentra en el tope superior.
18.1 LMNR_LS INPUT BOOL FALSE LOW LIMIT SIGNAL OF REPEATED MANIPULATED VALUE/ Señal tope de límite inferior de la realimentación de posición
La señal "Válvula de control en el tope inferior" se conecta a la entrada "Señal tope de límite inferior de la realimentación de posición".
• LMNR_LS=TRUE: La válvula de control se encuentra en el tope inferior.

Anexo
PID Temperature Control A5E00125041-02 A-15
Direc. Parámetro Declara-ción
Tipo de datos
Rango de valores
Valor inicial
Descripción
18.2 LMNS_ON INPUT BOOL TRUE MANIPULATED SIGNALS ON/ Conectar modo manual en señales manipuladas
En la entrada "Conectar modo manual en señales manipuladas" se pasa a modo Manual el procesamiento de las señales manipuladas.
18.3 LMNUP INPUT BOOL FALSE MANIPULATED SIGNALS UP/ Subir señal manipulada
En el modo Manual de las señales manipuladas se controla manualmente la señal de salida QLMNUP en la entrada "Subir señal manipulada".
18.4 LMNDN INPUT BOOL FALSE MANIPULATED SIGNALS DOWN/ Bajar señal manipulada
En el modo Manual de las señales manipuladas se controla manualmente la señal de salida QLMNDN en la entrada "Bajar señal manipulada".
20.0 QLMNUP OUTPUT BOOL FALSE MANIPULATED SIGNAL UP/ Subir señal manipulada
Estando activada la salida "Subir señal manipulada", debe abrirse la válvula de control.
20.1 QLMNDN OUTPUT BOOL FALSE MANIPULATED SIGNAL DOWN/ Bajar señal manipulada
Si está activada la salida "Bajar señal manipulada", se cerrará la válvula de control.
22.0 PV OUTPUT REAL 0.0 PROCESS VARIABLE/ Valor real
En la salida "Valor real" se emite el valor real que actúa realmente.
26.0 ER OUTPUT REAL 0.0 ERROR SIGNAL/ Error de regulación
En la salida "Error de regulación" se emite el error de regulación que actúa realmente.
30.0 COM_RST INPUT/ OUTPUT
BOOL FALSE COMPLETE RESTART/ Rearranque completo
El bloque tiene una rutina de inicialización que se procesa cuando está activada la entrada COM_RST.

Anexo
PID Temperature Control A-16 A5E00125041-02
Parámetros internos
Direc. Parámetro Declaración
Tipo de datos
Rango de valores
Valor inicial
Descripción
32.0 PV_FAC INPUT REAL 1.0 PROCESS VARIABLE FACTOR/ Factor de valor real
La entrada "Factor de valor real" se multiplica por el valor real. La entrada sirve para adaptar el rango del valor real.
36.0 PV_OFFS INPUT REAL En función de los sensores utilizados.
0.0 PROCESS VARIABLE OFFSET/ Offset de valor real
La entrada "Offset de valor real" se suma al valor real. La entrada sirve para adaptar el rango del valor real.
40.0 DEADB_W INPUT REAL ≥ 0.0 0.0 DEAD BAND WIDTH/ Ancho de zona muerta
El error de regulación se conduce por una zona muerta. La entrada "Ancho de zona muerta" determina el tamaño de la zona muerta.
44.4 PFAC_SP INPUT REAL 0.0 a 1.0 1.0 PROPORTIONAL FACTOR FOR SETPOINT CHANGES [0..1 ]/ Ganancia proporcional al cambiar el valor de consigna
PFAC_SP indica la acción P efectiva en caso de modificación del valor de consigna. Se ajusta entre 0 y 1.
• 1: la acción P está completamente operativa en caso de modificaciones del valor de consigna.
• 0: la acción P no está operativa en caso de modificaciones del valor de consigna.
48.0 GAIN INPUT REAL %/unidad física
2.0 PROPORTIONAL GAIN/ Ganancia del regulador
La entrada "Ganancia proporcional" indica la ganancia del regulador. El sentido de actuación del regulador se invierte mediante el signo negativo de GAIN.
52.0 TI INPUT REAL ≥ 0,0 s 40.0 s RESET TIME [s]/ Tiempo de acción integral [s]
La entrada "Tiempo de acción integral" determina el comportamiento temporal del integrador.
56.0 MTR_TM INPUT REAL ≥ CYCLE 30 s MOTOR ACTUATING TIME/ Tiempo de corrección del motor [s]
En el parámetro "Tiempo de corrección del motor" se introduce el tiempo de ejecución de la válvula de control desde un tope hasta el otro.

Anexo
PID Temperature Control A5E00125041-02 A-17
Direc. Parámetro Declaración
Tipo de datos
Rango de valores
Valor inicial
Descripción
60.0 PULSE_TM INPUT REAL ≥ 0,0 s 0,0 s MINIMUM PULSE TIME/ Duración mínima de impulso [s]
En el parámetro "Duración mínima de impulso" se puede parametrizar una longitud de impulso mínima.
64.0 BREAK_TM INPUT REAL ≥ 0,0 s 0,0 s MINIMUM BREAK TIME/ Duración mínima de pausa [s]
En el parámetro "Duración mínima de pausa" se puede parametrizar una longitud de pausa mínima.
68.0 PER_ MODE
INPUT INT 0, 1, 2 0 PERIPHERIE MODE/ Modo de operación Periferia
En este interruptor se puede indicar el tipo del módulo AE. El valor real de la entrada PV_PER se normaliza en la salida PV en °C.
• PER_MODE =0: Estándar
• PER_MODE =1: Climatización
• PER_MODE =2: Corriente/tensión
70.0 PVPER_ON INPUT BOOL FALSE PROCESS VARIABLE PERIPHERY ON/ Conectar valor real de periferia
Si se debe acceder al valor real de la periferia, la entrada PV_PER debe estar conectada a la periferia, y la entrada "Conectar valor real de periferia" debe estar activada.
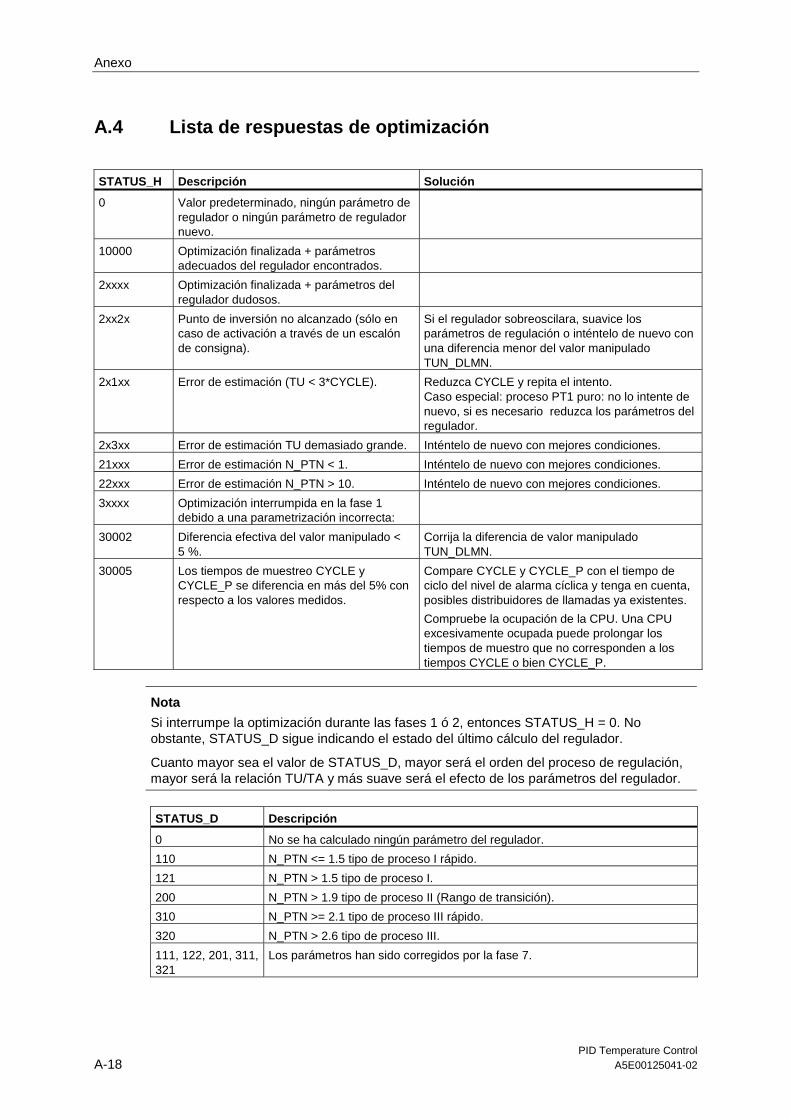
Anexo
PID Temperature Control A-18 A5E00125041-02
A.4 Lista de respuestas de optimización
STATUS_H Descripción Solución
0 Valor predeterminado, ningún parámetro de regulador o ningún parámetro de regulador nuevo.
10000 Optimización finalizada + parámetros adecuados del regulador encontrados.
2xxxx Optimización finalizada + parámetros del regulador dudosos.
2xx2x Punto de inversión no alcanzado (sólo en caso de activación a través de un escalón de consigna).
Si el regulador sobreoscilara, suavice los parámetros de regulación o inténtelo de nuevo con una diferencia menor del valor manipulado TUN_DLMN.
2x1xx Error de estimación (TU < 3*CYCLE). Reduzca CYCLE y repita el intento. Caso especial: proceso PT1 puro: no lo intente de nuevo, si es necesario reduzca los parámetros del regulador.
2x3xx Error de estimación TU demasiado grande. Inténtelo de nuevo con mejores condiciones.
21xxx Error de estimación N_PTN < 1. Inténtelo de nuevo con mejores condiciones.
22xxx Error de estimación N_PTN > 10. Inténtelo de nuevo con mejores condiciones.
3xxxx Optimización interrumpida en la fase 1 debido a una parametrización incorrecta:
30002 Diferencia efectiva del valor manipulado < 5 %.
Corrija la diferencia de valor manipulado TUN_DLMN.
30005 Los tiempos de muestreo CYCLE y CYCLE_P se diferencia en más del 5% con respecto a los valores medidos.
Compare CYCLE y CYCLE_P con el tiempo de ciclo del nivel de alarma cíclica y tenga en cuenta, posibles distribuidores de llamadas ya existentes.
Compruebe la ocupación de la CPU. Una CPU excesivamente ocupada puede prolongar los tiempos de muestro que no corresponden a los tiempos CYCLE o bien CYCLE_P.
Nota
Si interrumpe la optimización durante las fases 1 ó 2, entonces STATUS_H = 0. No obstante, STATUS_D sigue indicando el estado del último cálculo del regulador.
Cuanto mayor sea el valor de STATUS_D, mayor será el orden del proceso de regulación, mayor será la relación TU/TA y más suave será el efecto de los parámetros del regulador.
STATUS_D Descripción
0 No se ha calculado ningún parámetro del regulador.
110 N_PTN <= 1.5 tipo de proceso I rápido.
121 N_PTN > 1.5 tipo de proceso I.
200 N_PTN > 1.9 tipo de proceso II (Rango de transición).
310 N_PTN >= 2.1 tipo de proceso III rápido.
320 N_PTN > 2.6 tipo de proceso III.
111, 122, 201, 311, 321
Los parámetros han sido corregidos por la fase 7.
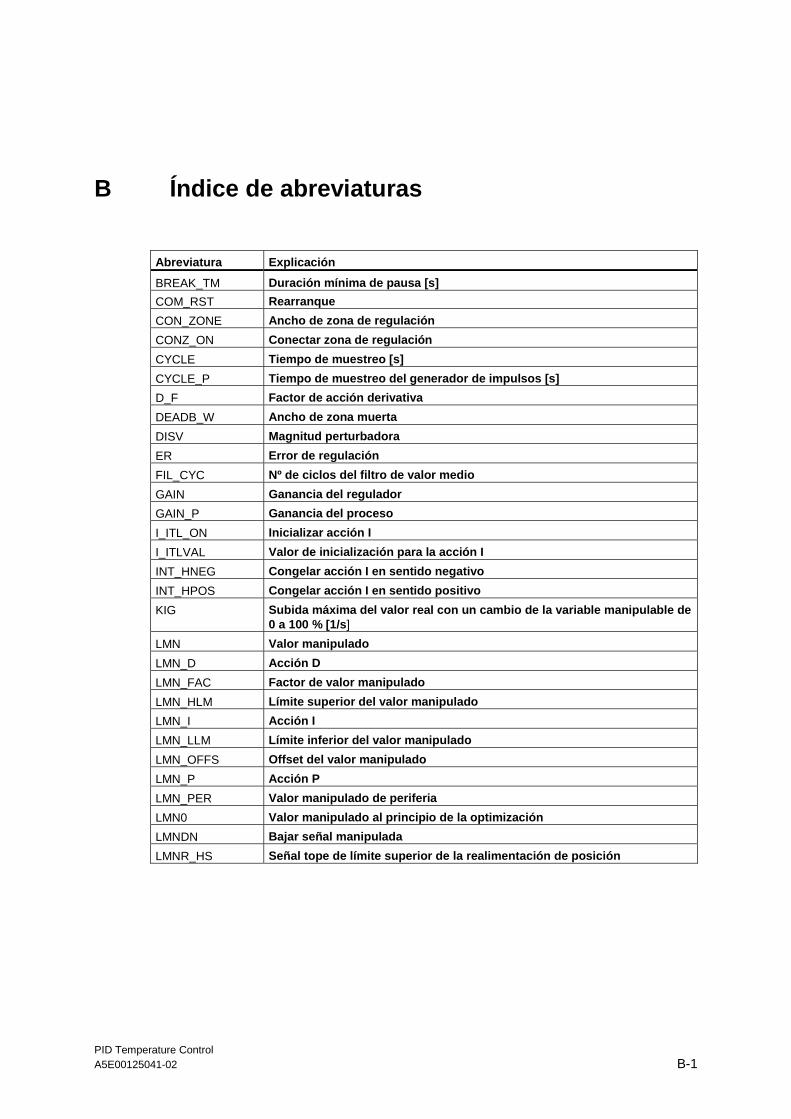
PID Temperature Control A5E00125041-02 B-1
B Índice de abreviaturas
Abreviatura Explicación
BREAK_TM Duración mínima de pausa [s]
COM_RST Rearranque
CON_ZONE Ancho de zona de regulación
CONZ_ON Conectar zona de regulación
CYCLE Tiempo de muestreo [s]
CYCLE_P Tiempo de muestreo del generador de impulsos [s]
D_F Factor de acción derivativa
DEADB_W Ancho de zona muerta
DISV Magnitud perturbadora
ER Error de regulación
FIL_CYC Nº de ciclos del filtro de valor medio
GAIN Ganancia del regulador
GAIN_P Ganancia del proceso
I_ITL_ON Inicializar acción I
I_ITLVAL Valor de inicialización para la acción I
INT_HNEG Congelar acción I en sentido negativo
INT_HPOS Congelar acción I en sentido positivo
KIG Subida máxima del valor real con un cambio de la variable manipulable de 0 a 100 % [1/s]
LMN Valor manipulado
LMN_D Acción D
LMN_FAC Factor de valor manipulado
LMN_HLM Límite superior del valor manipulado
LMN_I Acción I
LMN_LLM Límite inferior del valor manipulado
LMN_OFFS Offset del valor manipulado
LMN_P Acción P
LMN_PER Valor manipulado de periferia
LMN0 Valor manipulado al principio de la optimización
LMNDN Bajar señal manipulada
LMNR_HS Señal tope de límite superior de la realimentación de posición

Índice de abreviaturas
PID Temperature Control B-2 A5E00125041-02
Abreviatura Explicación
LMNR_LS Señal tope de límite inferior de la realimentación de posición
LMNS_ON Conectar modo manual en señales manipuladas
LMNUP Subir señal manipulada
LOAD_PID Cargar parámetros PID optimizados
MAN Valor manual
MAN_ON Conectar modo manual
MTR_TM Tiempo de corrección del motor [s]
N_PTN Orden del proceso
NOI_PVDT Nivel de ruido en PVDT_MAX en %
NOISE_PV Ruido absoluto en el valor real
P_B_TM Duración mínima de impulso o de pausa [s]
P_INF Valor real en el punto de inversión – PV0
PAR_SAVE Parámetros PID guardados del regulador
PER_MODE Modo de operación Periferia
PER_TM Periodo [s]
PFAC_SP Ganancia proporcional al cambiar el valor de consigna
PHASE Indicación de la fase de la optimización del regulador
PI_CON Parámetros PI del regulador
PID_CON Parámetros PID del regulador
PID_ON Conectar modo de operación PID
POI_CMAX Nº máximo de ciclos tras el punto de inversión
POI_CYCL Número de ciclos tras el punto de inversión
PULSE_ON Conectar generador de impulsos
PULSE_TM Duración mínima de impulso [s]
PV Valor real
PV_FAC Factor de valor real
PV_IN Entrada de valor real
PV_OFFS Offset de valor real
PV_PER Valor real de periferia
PV0 Valor real al principio de la optimización
PVDT Subida momentánea del valor real [1/s]
PVDT_MAX Modificación máx. del valor real por segundo [1/s]
PVDT0 Subida del valor real al iniciar la optimización [1/s]
PVPER_ON Conectar valor real de periferia
QC_ACT La acción del regulador continuo se procesa en la siguiente llamada
QLMN_HLM Límite superior del valor manipulado alcanzado
QLMN_LLM Límite inferior del valor manipulado alcanzado
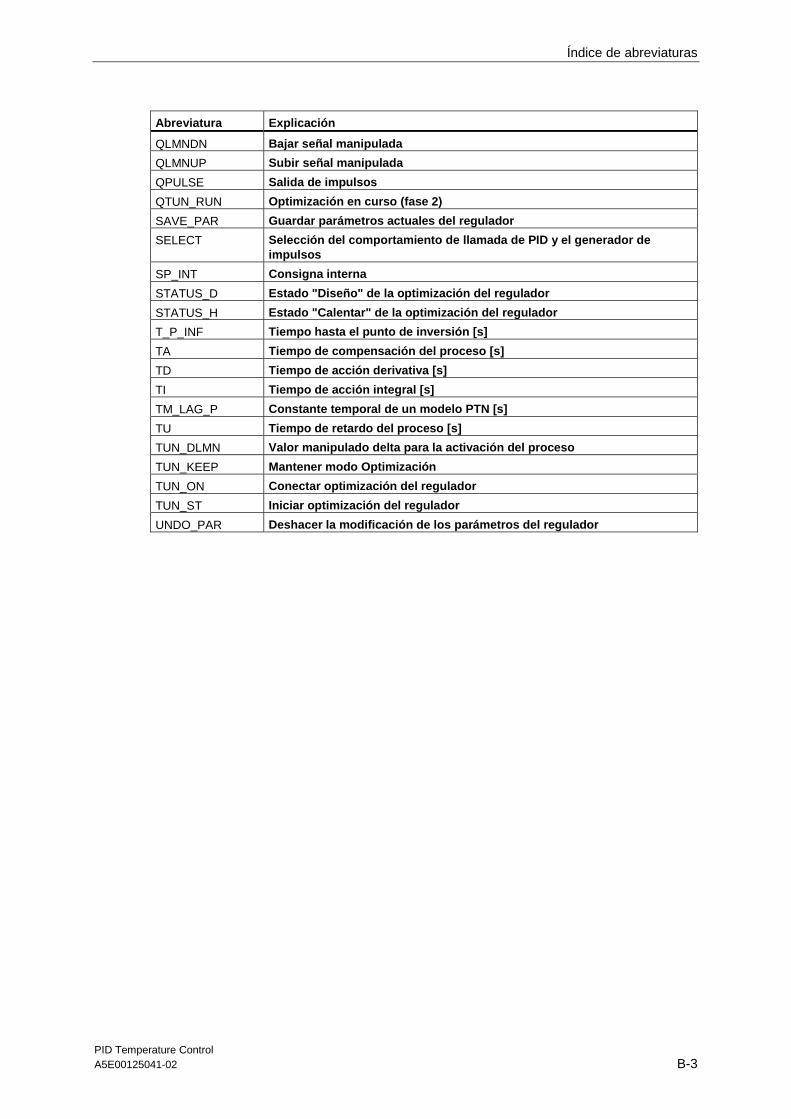
Índice de abreviaturas
PID Temperature Control A5E00125041-02 B-3
Abreviatura Explicación
QLMNDN Bajar señal manipulada
QLMNUP Subir señal manipulada
QPULSE Salida de impulsos
QTUN_RUN Optimización en curso (fase 2)
SAVE_PAR Guardar parámetros actuales del regulador
SELECT Selección del comportamiento de llamada de PID y el generador de impulsos
SP_INT Consigna interna
STATUS_D Estado "Diseño" de la optimización del regulador
STATUS_H Estado "Calentar" de la optimización del regulador
T_P_INF Tiempo hasta el punto de inversión [s]
TA Tiempo de compensación del proceso [s]
TD Tiempo de acción derivativa [s]
TI Tiempo de acción integral [s]
TM_LAG_P Constante temporal de un modelo PTN [s]
TU Tiempo de retardo del proceso [s]
TUN_DLMN Valor manipulado delta para la activación del proceso
TUN_KEEP Mantener modo Optimización
TUN_ON Conectar optimización del regulador
TUN_ST Iniciar optimización del regulador
UNDO_PAR Deshacer la modificación de los parámetros del regulador

Índice de abreviaturas
PID Temperature Control B-4 A5E00125041-02

PID Temperature Control A5E00125041-02 Índice alfabético-1
Índice alfabético
A Algoritmo del regulador discontinuo PI ................ 4-4
control anticipativo........................................... 4-4 Archivo Léame..................................................... 1-2
B Base de tiempo.................................................. 2-15
C Comportamiento en régimen transitorio .............. 3-3 CYCLE .............................................................. 2-15 CYCLE_P ................................................. 2-15, 2-17
D DB de instancia para el FB 58 "TCONT_CP" ......A-2 DB de instancia para el FB 59 "TCONT_S".......A-14
E Ejemplo con FB 58 "TCONT_CP" .........6-2, 6-6, 6-7 Ejemplo con FB 59 "TCONT_S" ........................ 6-11
F FB 58 "TCONT_CP"
algoritmo PID................................................... 2-4 almacenamiento de los parámetros
del regulador................................................ 2-9 aplicación......................................................... 1-3 atenuación de la acción P................................ 2-5 base de tiempo.............................................. 2-15 cálculo del valor manipulado ..........2-6, 2-9, 2-12,
......................................................3-2, 3-4, 3-5 control anticipativo........................................... 2-6 conversión del formato del valor real............... 2-2 DB de instancia ...............................................A-2 descripción ...................................................... 1-4 diagrama de bloques ..................................... 2-13 diagrama de bloques de la formación
del error de regulación................................. 2-1 diagrama de bloques del algoritmo PID... 2-4, 2-6,
......................................2-9, 2-12, 3-2, 3-4, 3-5 diagrama de bloques del almacenamiento y
recarga de los parámetros del regulador..... 2-9 ejemplo..............................................6-2, 6-6, 6-7 esbozo de la estructura ................................... 1-3 formación del error de regulación ............. 2-1, 2-3 generador de impulsos .................................. 2-11 inicialización ................................2-14, 2-15, 2-18 integrador ........................................................ 2-5
limitación del valor manipulado ....................... 2-8 normalización del valor manipulado ................ 2-8 normalización del valor real............................. 2-2 normalización del valor real, ejemplo .............. 2-3 optimización del regulador............................... 3-1 preparativos..................................................... 3-6 procesamiento de valores manuales............... 2-7 proceso de refrigeración.................................. 1-3 rama del valor de consigna ............................. 2-1 recarga de parámetros guardados
del regulador ............................................... 2-9 selección del valor real .................................... 2-1 tiempo de muestreo del regulador........ 2-15, 2-16 zona de regulación .......................................... 2-6 zona muerta .................................................... 2-3
FB 59 "TCONT_S"............................................... 1-4 algoritmo del regulador discontinuo PI ............ 4-4 aplicación ........................................................ 1-4 conversión del valor real.................................. 4-2 DB de instancia .............................................A-14 descripción ...................................................... 1-4 Diagrama de bloques ...................................... 4-5 formación del error de regulación............. 4-1, 4-3 inicialización .................................................... 4-7 normalización del valor real............................. 4-2 rama del valor de consigna ............................. 4-1 selección del valor real .................................... 4-1 tiempo de muestreo......................................... 4-7 zona muerta .................................................... 4-3
G Gama de productos............................................. 1-1 Generador de impulsos ..................................... 2-11 Guía rápida.......................................................... 5-1
I Influencias perturbadoras.................................... 3-3
L Linealidad............................................................ 3-3
M Modulación del ancho de pulso ......................... 2-11
Índice alfabético
PID Temperature Control Índice alfabético-2 A5E00125041-02
O Optimización del regulador........................... 3-1, 3-4
gran acoplamiento térmico ............................ 3-19 inicio ................................................................ 3-8 interrupción.................................................... 3-12 ligero acoplamiento térmico........................... 3-20 problemas...................................................... 3-12 repaso............................................................ 3-16 respuestas.....................................................A-18 resultado........................................................ 3-11
P Post-optimización en modo Regulación ............ 3-16 Proceso de refrigeración ..................................... 1-3 PULSEGEN....................................................... 2-11
R Regulación........................................................... 6-1
Respuestas de la optimización..........................A-18
S Software
instalación ....................................................... 1-1 STATUS_H........................................................A-18
T tiempo de muestreo del regulador..... 2-15, 2-16, 4-7 Tipo de proceso
comprobación................................................ 3-11 Tipos de procesos ............................................... 3-2
Z Zona de trabajo ................................................... 3-3











![Netex learningCentral | What's New v5.1 [Es]](https://static.fdocuments.ec/doc/165x107/5416087c8d7f728a6c8b4938/netex-learningcentral-whats-new-v51-es.jpg)