Sensores Full
122
SENSORES Y ACTUADORES TÉCNICO EN MINAS Sensores y Actuadores 1
-
Upload
juan-curiqueo-curiqueo -
Category
Documents
-
view
23 -
download
0
Transcript of Sensores Full
SENSORES Y ACTUADORES
TÉCNICO EN MINASSensores y Actuadores
1

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Índice Introducción Clasificación Sensores
Transductores de posición Detectores de presencia Medidores de posición Transductores de pequeños
desplazamientos/deformación Transductores de velocidad Acelerómetros Medidas de temperatura Finales de carrera, microrruptores
Actuadores Neumáticos Eléctricos Hidráulicos
2

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Introducción
□ Denominamos sensor a un dispositivo que es capaz de convertir una magnitud física (presión, temperatura, caudal) en una señal eléctrica.
En la figura mostramos el esquema básico de un sensor.
□ El sensor convierte la magnitud física en una señal eléctrica.□ La señal eléctrica se debe acondicionar (amplificar, eliminar ruido, linealizar)
para adaptarla a las necesidades del equipo que debe leer la señal (autómata).
Sensor
Acondicionador de señal
(filtrado + amplificación)
Salida: señal eléctrica acondicionada
Magnitud Señal
física eléctrica
Señal
3

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Clasificación Según el tipo de señal de salida:
" Analógicos: La salida es un valor de tensión o corriente comprendida en un rango de valores: 0-10V 4-20mA Ejemplos: Medida de ttura. Medida de caudal. Medida de
posición/orientación.
Digitales: La salida toma dos valores únicamente a la salida: 1 ó 0, todo/nada 0-5V, 0-24V Tren de pulsos Otra codificación Ejemplos:
Pulsador Sonda lambda coches (medida mezcla rica/pobre). Sensor de presencia (pieza/no pieza) Final de carrera
Según la naturaleza del sensor: Resistivos Piezoeléctricos Termoeléctricos Electromagnético
4

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Transductores de posición
Vamos a estudiar: Detectores de presencia o proximidad: Típos. Respuesta
todo/nada, analógica (distancia a la que se encuentra el objeto) Inductivos: Capacitivos Ópticos
Medidores de posición/orientación Algunos de los anteriores Potenciómetros Encoders
Transductores de pequeñas posiciones/deformaciones LVDT Galgas extensométricas Sensores piezoeléctricos
5

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
7
Sensores de presencia inductivos
Se basan en el cambio en la reluctancia del “núcleo”.
Detectan la presencia de materialesferromagnéticos en su proximidad.
Esquema general: Bobina con núcleo ferromagnético Circuito oscilador Disparador Schmitt Circuito amplificador a la salida
El circuito oscilador mantiene una onda senoidal con voltaje de determinada amplitud.
Al acercar un objeto ferromagnético, se varía la reluctancia de la bobina, haciendo que la amplitud de la onda disminuya.
La disminución de la amplitud activa el disparador Schmitt.
Rango de detección 1-60 mm, típ.
6

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores de presencia inductivos
Ejemplos de aplicación: Presencia / no presencia de pieza Finales de carrera Conteo de piezas
Ventajas: Ausencia de contacto, frente a micro – interruptores. Ausencia de partes móviles Resistente a ambientes agresivos (estanco)
8
7

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
ISA-UMHhttp://isa.umh.es/
Detectores inductivos
Masa (-)
Alimentación externa 24Vcc (+)
Entrada I0.4
8

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores de presencia inductivos
Posicionado de piezas Centros de mecanizado, cilindros neumáticos, ...
9

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores de presencia inductivos
Conteo de piezas y secuencias de movimiento Cintas transportadoras, dispositivos de clasificación
10

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores de presencia inductivos
Medición de velocidad de rotación Engranajes, ....
11

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores de presencia inductivos
Supervisión de herramientas Verificación de rotura de una broca
12

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores capacitivos
Su medida se basa en el cambio de la capacitancia que experimenta un condensador al introducir un objeto en su cercanía.
Permiten detectar materiales metálicos y no metálicos Polvos, granulados Líquidos Sólidos
En general son menos precisos que los sensores inductivos Aplicaciones típicas
Medida de nivel de tanques Detección de objetos no metálicos
13

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores capacitivos
Aplicaciones Detección de suelas de
goma negras
14

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores capacitivos
Aplicaciones Nivel de llenado de líquidos
Sensor de proximidad capacitivo, encapsulado en plástico o en cristal de cuarzo
A través de un tubo de plástico o vidrio
15

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores ópticos (fotoeléctricos)
Su medida se basa en la transmisión de un rayo de luz y su posterior recepción.
Tecnologías: LED, infrarrojo Láser
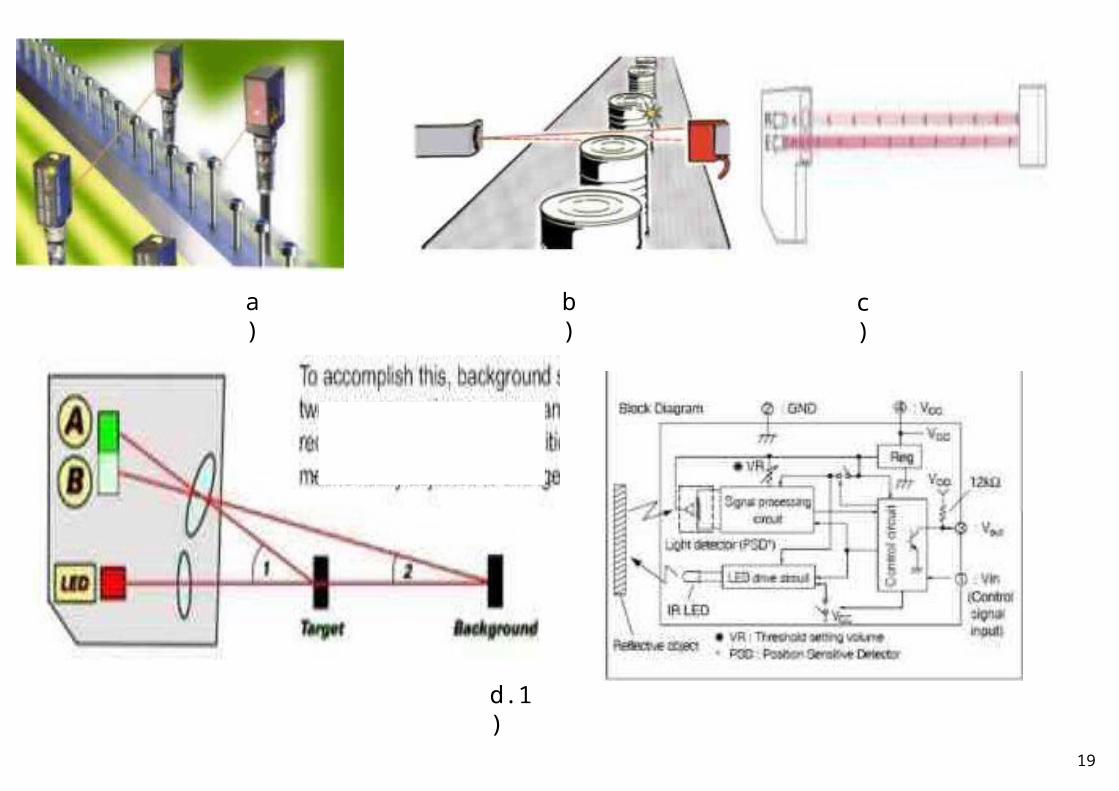
Configuraciones: a) Emisor y receptor separados: En el
funcionamiento normal, el emisor emite luz y el receptor la recibe. La detección se efectúa por corte del haz. La instalación puede ser complicada si la distancia es grande, ya que emisor y receptor se deben alinear. Presencia de objetos, puertas de garaje (25m, láser 60m).
16

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores ópticos (fotoeléctricos)
Configuraciones (continuación): b) Emisor y receptor juntos (retro-reflectivos): Similar al
anterior, pero necesitan de la instalación de un espejo para conseguir reflejar el rayo. Detección por corte del haz. Instalación más sencilla. (12m, laser 30m, mitad de la distancia aprox. comparado con los anteriores, ascensores…).
c) Difusos: La detección se obtiene por la reflexión del haz sobre el objeto en todas direcciones. Cuando no hay objeto, el sensor no recibe luz. Cuando la luz reflejada es suficiente, el receptor se activa y se detecta el objeto (depende de las propiedades del material. P.e. un objeto negro mate absorbe toda la energía y no es detectado) (0-400mm, según modelos).
d) Medida de distancia
17
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores ópticos (fotoeléctricos)
Configuraciones: a) Emisor y
receptor separados
b) Emisor y receptor juntos (retro-reflectivos)
c) Difusos d) Medida de
distancia: Dos soluciones: d.1) Basada en un LED. El LED emite luz. Ésta es reflejada por el
objeto con un ángulo determinado, que depende de la distancia. La luz reflejada es recogida sobre una superficie (PSD, similar a una CCD) que permite estimar el ángulo de la luz incidente.
d.2) Basada en tecnología láser. El sensor emite un rayo de luz láser y mide el tiempo empleado por el rayo en viajar el doble de distancia hasta el obstáculo. Aplicaciones: Protección de acceso a máquinas. Interfaces con PLCs. Posibilidad para el control dimensional (0-7m, según modelos, precisión de 2-5cm).
18
a) b) c)
d.1)
19

d.2)
20

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
Sensores ópticos
Aplicaciones
Verificando objetos en envases transparentes
Altura
21
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
22
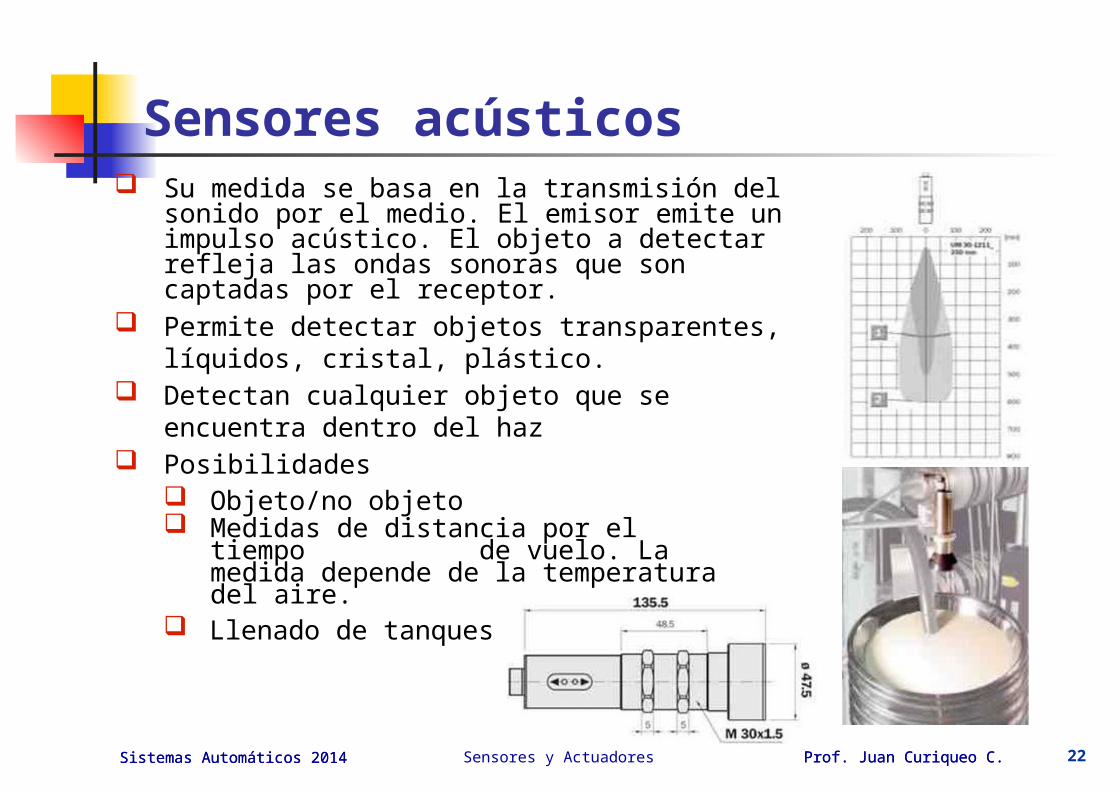
Sensores acústicos Su medida se basa en la transmisión del sonido por
el medio. El emisor emite un impulso acústico. El objeto a detectar refleja las ondas sonoras que son captadas por el receptor.
Permite detectar objetos transparentes, líquidos, cristal, plástico.
Detectan cualquier objeto que se encuentra dentro del haz
Posibilidades Objeto/no objeto Medidas de distancia por el tiempo
de vuelo. La medida depende de la temperatura del aire.
Llenado de tanques
22

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores acústicos
Sensores de proximidad ultrasónicos Emiten sonido en el rango inaudible a cualquier
frecuencia Recibe el eco
23

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores acústicos
La distancia máxima a medir esta limitada por la frecuencia de repetición de pulsos 1 Hz a 25 Hz
24

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
25
Sensores acústicos
25

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
Autómatas Programables
2ISA-UMH © TDOC-2001
Sensores acústicos
6
26

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores capacitivos, inductivos y ópticos
Se pueden utilizar varios para la discriminación de materiales Detección de material, para suministrar o clasificar material Cada sensor dará respuestas diferentes en función de las
características del material.
27

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Supervisión de niveles de llenado Sensores ópticos, capacitivos o ultrasónicos
Sensores capacitivos, inductivos y ópticos
28

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores capacitivos, inductivos y ópticos
Detección de la forma de un objeto Disposición de varios detectores de proximidad dispuestos
siguiendo un contorno
29

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 30
Sensores – Tipo según uso

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Transductores de posición Podemos encontrar:
Detectores de presencia o proximidad: Tipo: Respuesta todo/nada, tb analógica Inductivos Capacitivos Ópticos
Medidores de posición/orientación Algunos de los anteriores Potenciómetros Encoders
Transductores de pequeñas posiciones/deformaciones LVDT Galgas extensométricas Sensores piezoeléctricos
31
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Transductores En automatización hay que disponer de elementos que nos adapten
las magnitudes de referencia (variables de entrada) en otro tipo de magnitudes proporcionales a las anteriores, de manera que estos últimos sean interpretables por el sistema y así se pueda realizar un buen control del proceso. Entre los elementos más importantes se encuentran:
Sensor: se define normalmente como el elemento que se encuentra en contacto directo con la magnitud que se va a evaluar. El sensor recibe la magnitud física y se la proporciona al transductor.
Transductor: es un elemento o dispositivo que tiene la misión de traducir o adaptar un tipo de energía en otro más adecuado para el sistema, es decir convierte una magnitud física, no interpretable por el sistema, en otra variable interpretable por dicho sistema.
32

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Transductores (continuación) El transductor transforma la señal que entrega el sensor en otra
normalmente de tipo eléctrico. El transductor suele incluir al sensor.
Captador: es un dispositivo encargado de recoger o captar un tipo de información en el sistema para realimentarla. Podemos decir por lo tanto que es un transductor que se coloca en el lazo de realimentación de un sistema cerrado para recoger información de la salida (no suele ser de tipo eléctrico) y adaptarla para poder se comparada con la señal de referencia. Suele incluir al sensor.
En sistemas de lazo abierto o incluso en definiciones de diversos autores, captador y sensor suelen ser la misma cosa.
Transmisor: se entiende por transmisor la circuitería que transforma la señal que sale del sensor, transductor o captador y la convierte en una señal normalizada.
33
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
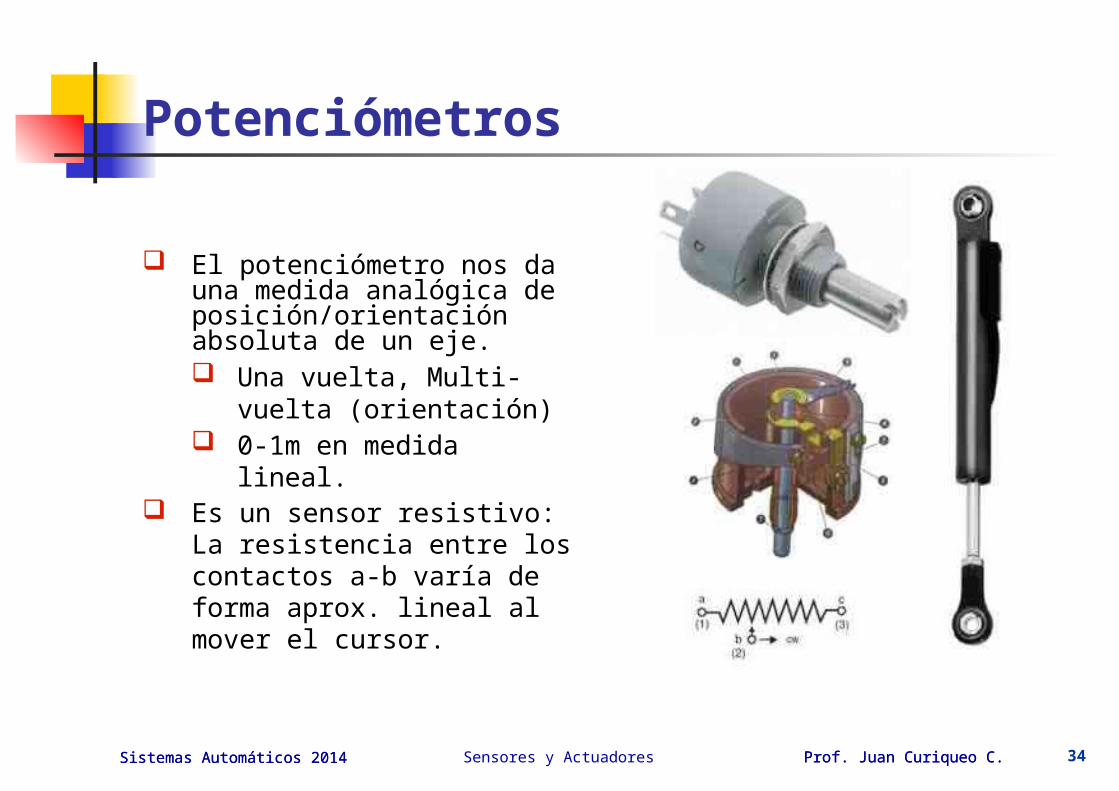
Potenciómetros
El potenciómetro nos da una medida analógica de posición/orientación absoluta de un eje. Una vuelta, Multi-vuelta
(orientación) 0-1m en medida lineal.
Es un sensor resistivo: La resistencia entre los contactos a-b varía de forma aprox. lineal al mover el cursor.
34

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Encoders Rotor solidario a un disco con bandas opacas y
translúcidas alternadas. Emisores ópticos: LED emite luz. Detectores ópticos: Detectan una banda u otra. Incrementales: Generalmente en cuadratura. Dos
canales A y B. Posición incremental y sentido de giro. Absolutos: Codificación absoluta de la posición del
eje. Cada posición está codificada con un código único.
Aplicaciones: Control de giro de motores. Medida de la velocidad de giro.
35
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
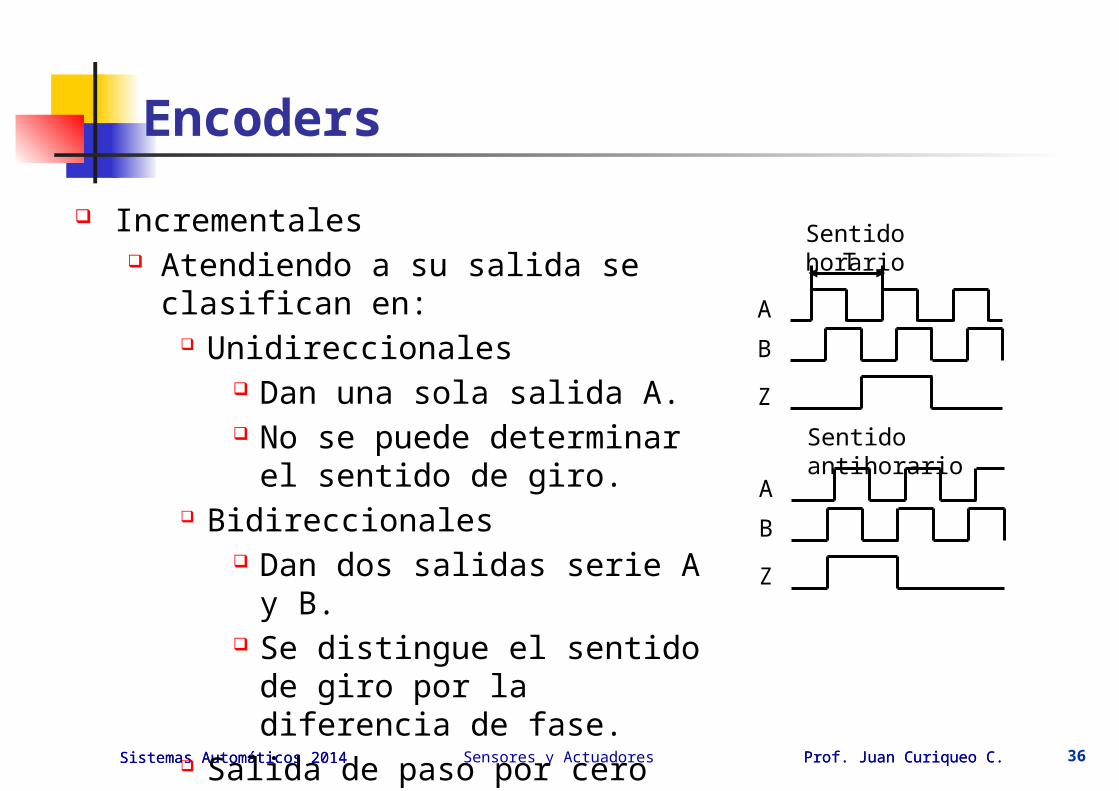
Encoders
Incrementales Atendiendo a su salida se clasifican en:
Unidireccionales Dan una sola salida A. No se puede determinar el
sentido de giro. Bidireccionales
Dan dos salidas serie A y B. Se distingue el sentido de giro
por la diferencia de fase. Salida de paso por cero
Un pulso por vuelta Z.
A
B
Z
A
B
Z
Sentido horario
Sentido antihorario
T
36
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Transductores de posición Podemos encontrar:
Detectores de presencia o proximidad: Tipo. Respuesta todo/nada, analógica Inductivos Capacitivos Ópticos
Medidores de posición/orientación Algunos de los anteriores Potenciómetros Encoders
Transductores de pequeñas posiciones/deformaciones LVDT Galgas extensométricas Sensores piezoeléctricos
37

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 201438
LVDT: Linear Variable Differential Transformer
Es, en esencia, un transformador. Un primario y dos secundarios acoplados mediante un núcleo móvil,
solidario a un vástago. Se aplica un voltaje senoidal al primario. Se lee la amplitud de la tensión de salida en el secundario. El desplazamiento del vástago influye en la relación de transformación.
La amplitud de la onda de salida indica la posición. Características:
Muy buena precisión (hasta 5 nm). Salida analógicaNo hay contacto entre primario y secundario. Aplicaciones con riesgo de chispa.
38
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
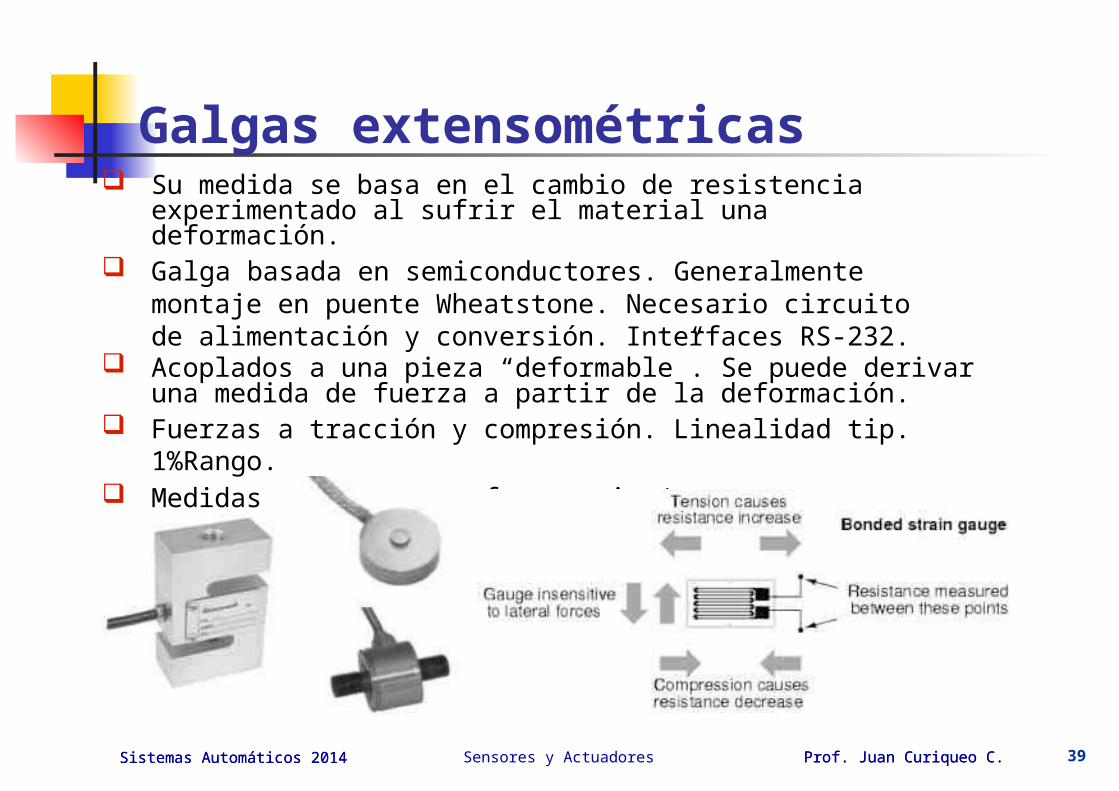
Su medida se basa en el cambio de resistencia experimentado al sufrir el material una deformación.
Galga basada en semiconductores. Generalmente montaje en puente Wheatstone. Necesario circuito de alimentación y conversión. Interfaces RS-232.
Acoplados a una pieza “deformable”. Se puede derivar una medida de fuerza a partir de la deformación.
Fuerzas a tracción y compresión. Linealidad tip. 1%Rango. Medidas hasta cierta frecuencia (no es un sensor demasiado rápido).
Galgas extensométricas
39

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
Galgas extensométricas
40

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Aplicaciones típicas: Pesaje. Máquinas de ensayos. Medida de fuerzas en máquinas
Galgas extensométricas
41

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores piezoeléctricos Sensor basado en material piezoeléctrico (cuarzo) Efecto piezoeléctrico: El sensor genera una carga
en respuesta a una deformación. Acoplados a una pieza “deformable”. Se puede derivar
una medida de fuerza a partir de la deformación. Necesitan de un circuito conversor carga-voltaje. La carga decae en el tiempo (existe una corriente
residual). Las medidas no son válidas en t=! . En la práctica tienen un drift= 50mN/s
Medidas de fuerza muy rápidas: Impactos, vibraciones.
Tracción y compresión con sensores precargados.
42

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores de velocidad y aceleración
Transductores de velocidad: Tacogeneradores. Dinamo. Generadores de impulsos. Basados en sensores
ópticos y encoders. Acelerómetros: Basados en sensores piezoeléctricos,
capacitivos. Medidas de temperatura:
Termopares: Basados en el efecto Seebeck (unión de dos metales a cierta temperatura produce un voltaje cuando este se calienta)
Termoresistencias: Basados en el cambio de resistencia experimentado por el material. Pt100 (Platino, 100 Ohm a 0ºC). PTC, NTC (Positive/Negative Temperature Coefficient) basados en semiconductores.
43

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores de velocidad y aceleración
□ Wii:
44

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Microrruptores, finales de carrera
Se pueden considerar detectores de proximidad con contacto Interruptores de posición electromecánicos
Se establece o se interrumpe un contacto eléctrico por medio de una fuerza externa. Vida útil 10 millones de ciclos.
Tiempos de conmutación entre 1 y 10ms Cuando se utilizan interruptores electromecánicos para
operaciones de conteo, deben tenerse en cuenta los posibles rebotes de los contactos.
45

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Microrruptores, finales de carrera
Detectan el final de carrera por contacto. Una barra basculante mueve directamente un interruptor. Vuelve a la posición anterior por medio de un muelle.
Aplicaciones: Detección de 2 o más posiciones en la parte de una máquina. Detección de un objeto al final de una cinta transportadora. Puertas, elevadores, ascensores
48
46

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Microrruptores, finales de carrera
Más ejemplos:
47

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Microrruptores, finales de carrera
Ejemplos de uso de interruptores electromecánicos
48

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
Microrruptores, finales de carrera
49

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Autómatas Programables 52ISA-UMH © TDOC-2001
Conexión de sensores o captadoresAlimentación externa 24Vcc (+)
Entrada I0.1
50

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
EJEMPLO SELECCIÓN SENSORES
Ascensor: Detección de objetos o personas entre las puertas.
Óptico: Emisor y receptor separados. Emisor y receptor juntos (más común)
Sensor puertas abiertas/cerradas Inductivo Final de carrera.
Sensor en cada planta: Detección de que la cabina se encuentra en esa planta. Inductivo (sin contacto) Final de carrera.
Medida de peso. Protección contra sobrecargas en el aparato. Galga extensométrica (con sistema de seguridad)
Pulsadores…51

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
EJEMPLO SELECCIÓN SENSORES
52
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
EJEMPLO SELECCIÓN SENSORES
Aplicación de envasado de tomate frito. La estación de llenado, introduce una cantidad fija de
tomate en cada envase.
El sensor 1 controla la presencia del envase (lata metálica)
El sensor 2 mide el nivel de llenado de la lata.
El actuador 1 se encarga de eliminar las latas con un llenado deficiente.
La estación de envasado coloca el cierre superior a cada una de las latas.
El sensor 3 controla la presencia de la lata.
El sensor 4 detecta la presencia de la tapa superior metálica.
El actuador 2 elimina las latas defectuosas. 53

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
EJEMPLO SELECCIÓN SENSORES
Aplicación práctica: Seleccionar los sensores para la aplicación comentada (4
sensores). Modelo concreto de cada sensor y fabricante. Conectar correctamente los sensores elegidos.
A tener en cuenta: Alimentación (todos los sensores alimentados a la misma
tensión). Tipo de sensor correcto para cada tarea (inductivo,
capacitivo…, justificar la decisión). Rango de trabajo del sensor (distancia de trabajo,
justificar por qué funcionaría bien). Frecuencia de conmutación del sensor (suponer 3
latas/segundo). Otros parámetros, p.e. protección frente a líquidos.
54
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Actuadores
Actuador: Elemento capaz de intervenir en el proceso que pretendemos controlar.
Clasificación: Según el tipo de energía
empleada: Accionamientos eléctricos. Accionamientos neumáticos. Accionamientos hidráulicos. Accionamientos térmicos.
55
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
ISA-UMH
http://isa.umh.es/
59
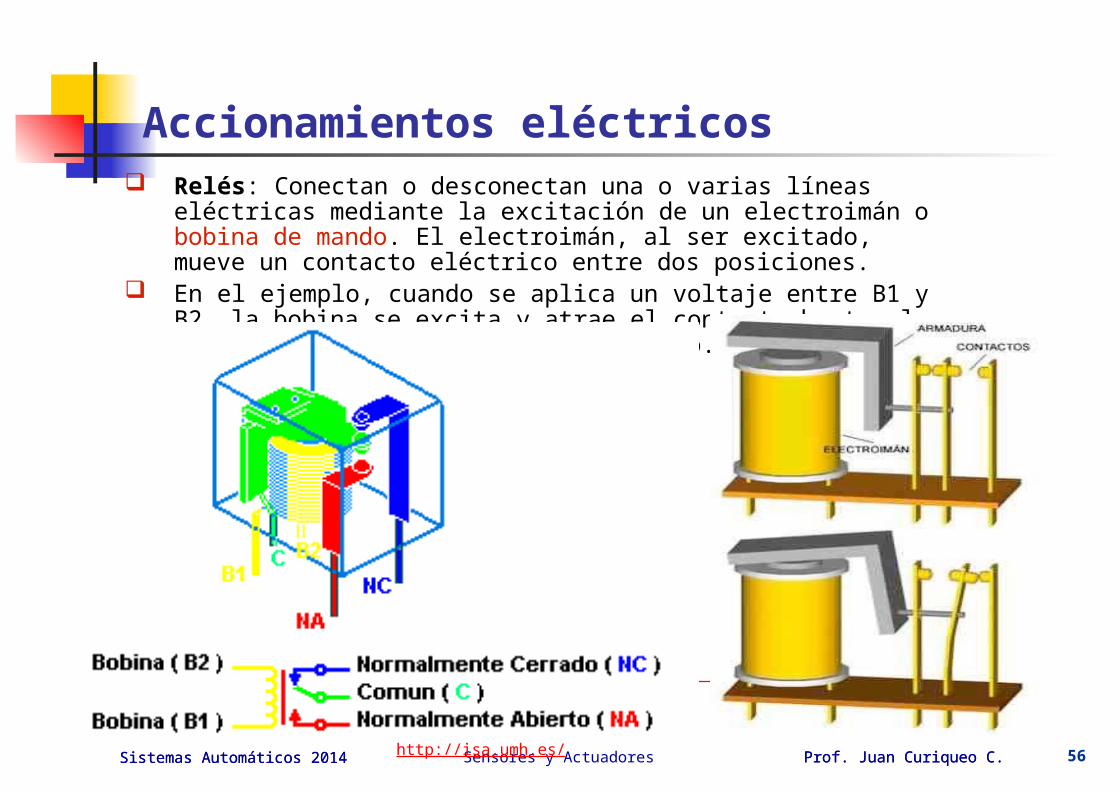
Accionamientos eléctricos Relés: Conectan o desconectan una o varias líneas eléctricas mediante
la excitación de un electroimán o bobina de mando. El electroimán, al ser excitado, mueve un contacto eléctrico entre dos posiciones.
En el ejemplo, cuando se aplica un voltaje entre B1 y B2, la bobina se excita y atrae el contacto hasta el terminal NA, cerrando así el circuito.
56

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Accionamientos eléctricos
Permiten al autómata accionar potencias mayores. El relé necesita de poca potencia para ser accionado y es capaz de conducir gran cantidad de corriente (motores, máquinas).
Proporcionan una separación eléctrica entre el autómata y el circuito que se gobierna.
Características: Tensión de mando y corriente de mando: Tensión y corriente de
alimentación de la bobina de mando (AC o DC). El autómata deberá ser capaz de proporcionarla para poder manejar el relé.
Potencia de empleo: Voltaje y corriente máxima que puede dar de salida.
Tiempos de accionamiento: tiempos que tarda en abrir y cerrar el circuito del orden de ms.
Relés de estado sólido: Basados en silicio. Encapsulado. Optoacoplado (según figura). El LED se acciona por niveles lógicos y excita un transistor, tiristor o triac. Tiempos de respuesta menores.
6057

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
61
Contactores
Varios contactos eléctricos accionados típicamente mediante relé: contactor.
Utilidad: P.ej. Para invertir el sentido de giro de un motor eléctrico. 24 V
0 V
58

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Contactores Tipos de contactores:
Contactor unipolar NA, con contacto auxiliar NA
Contactor bipolar NA, con contacto auxiliar NA
Contactor tripolar NA,
con contactos auxiliares NA y NC
59

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Contactores: Conexión
Mód
ulo
de s
alid
as d
igit
ale
s a
re
lé L1 Q
3.0
. 1
. 2
. 3
Ejemplo: Modulo de salidas a relé
M3
24V
cc
60
Contactor con bobina 24Vcc
Piloto o lámpara indicadora

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Contactores: Conexión□ Ejemplo:Modulo de salidas a relé
Mód
ulo
de s
alid
as d
igit
ale
s a
re
lé L1 Q
3.0
. 1
. 2
. 3
M3
L2
Q4.0
24V
DC
220
Vca
61
Piloto o lámpara indicadora
Contactor con bobina 220Vca

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
65
Relés de protección Relé magnetotérmico (interruptor automático)
62

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Interruptores diferenciales
Su funcionamiento se basa en la diferencia de corriente entre ambos conductores. P.e. Puesta a masa.
63

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Actuadores (1) Genéricamente se conoce con el nombre de actuadores
a los elementos finales que permiten modificar las variables a controlar en una instalación automatizada.
Se trata de elementos que ejercen de interfaces de potencia, convirtiendo magnitudes físicas, normalmente de carácter eléctrico en otro tipo de magnitud que permite actuar sobre el medio o proceso a controlar. Al mismo tiempo aíslan la parte de control del sistema de las cargas que gobiernan el proceso.
Entre los accionamientos más habituales se encuentran los destinados a producir movimiento (motores y cilindros), los destinados al traslado de fluidos (bombas) y los de tipo térmico (hornos, intercambiadores, etc.)
64

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
En muchas ocasiones es posible distinguir en la configuración física del actuador dos componentes
claramente diferenciados
Actuadores (2)
65

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Accionador: Que se encarga de aportar la “energía” (lumínica, calorífica, …) necesaria al sistema, para modificar los valores de la magnitud física a controlar. Una bomba, un radiador, un motor, etc. son ejemplos claros de accionadores.
Preaccionador: Que permite de manera intermedia, la amplificación y/o conversión de la señal de control proporcionada por el controlador para el gobierno de la instalación: relé de maniobra o contactor, electroválvula, etc. Nos centraremos en éstos
Actuadores (3)
66
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Clasificación atendiendo al tipo de energía empleada en el accionamiento:
Accionamientos eléctricos Accionamientos hidráulicos Accionamientos neumáticos Accionamientos térmicos
Dentro de cada una de estas tecnologías encontramos accionamientos de dos tipos:
Accionamientos todo-nada Accionamientos de tipo continuo
Actuadores (4)
67
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
(Pre)Accionamientos eléctricos
Relés y contactores. Dispositivos electromagnéticos que conectan o desconectan un circuito eléctrico de potencia al excitar un electroimán o bobina de mando.
Los relés están previstos para accionar pequeñas potencias (del orden de 1kW)
Servomotores. Pequeñas máquinas especialmente diseñadas para el control de posicionamiento
Actuadores (5)
68

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
(Pre)Accionamientos hidráulicos y neumáticos
•Válvulas distribuidoras. Dispositivos que permiten establecer o cortar la conexión hidráulica o neumática entre dos o más vías. Ya estudiadas.
•Servoválvulas. Válvulas proporcionales capaces de regular la presión o el caudal siguiendo una cierta magnitud de consigna de tipo eléctrico.
•Cilindros. Permiten obtener un movimiento aplicando una presión hidráulica o neumática a uno u otro lado del émbolo. Ya estudiados.
Actuadores (6)
69

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Motores eléctricos
De corriente continua: Pro: Par de arranque alto. Contra: Desgaste de las escobillas.
De corriente alterna: Ausencia de escobillas Asíncronos: Deslizamiento entre rotor y estátor
necesario para la generación de par. Accionados por variadores de frecuencia.
Síncronos: Brushless, en la práctica. Alimentados con D.C. Campo magnético en el rotor generado por tierras raras. Campo magnético giratorio en el estátor generados mediante PWM.
En la práctica el motor es accionado con un driver, con interfaz para el PLC.
70
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
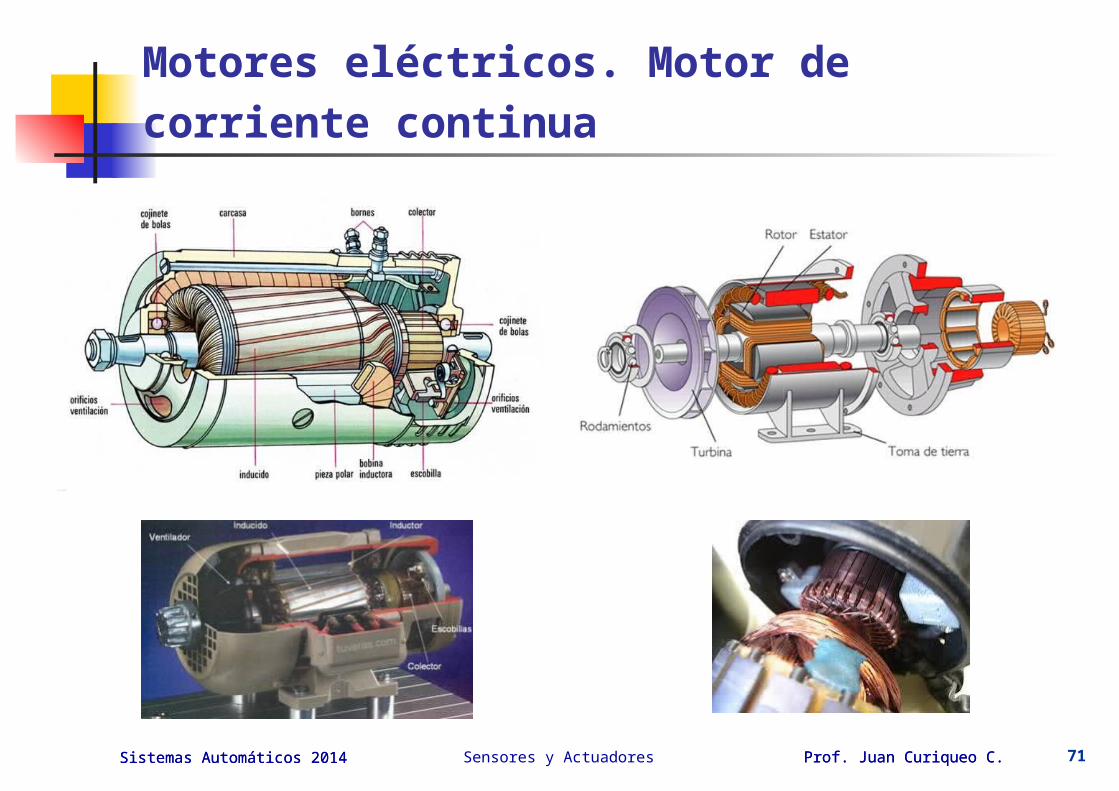
Motores eléctricos. Motor de corriente continua
71

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Motores eléctricos. Motor de corriente continua- Características
Desde fracciones de potencia hasta KW
Se usa cuando se requiere regular velocidad o par
Regula desde cero rpm a velocidad nominal con muy buena precisión.
Posibilidad de regular par.
Tiene par a cero rpm.
72
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
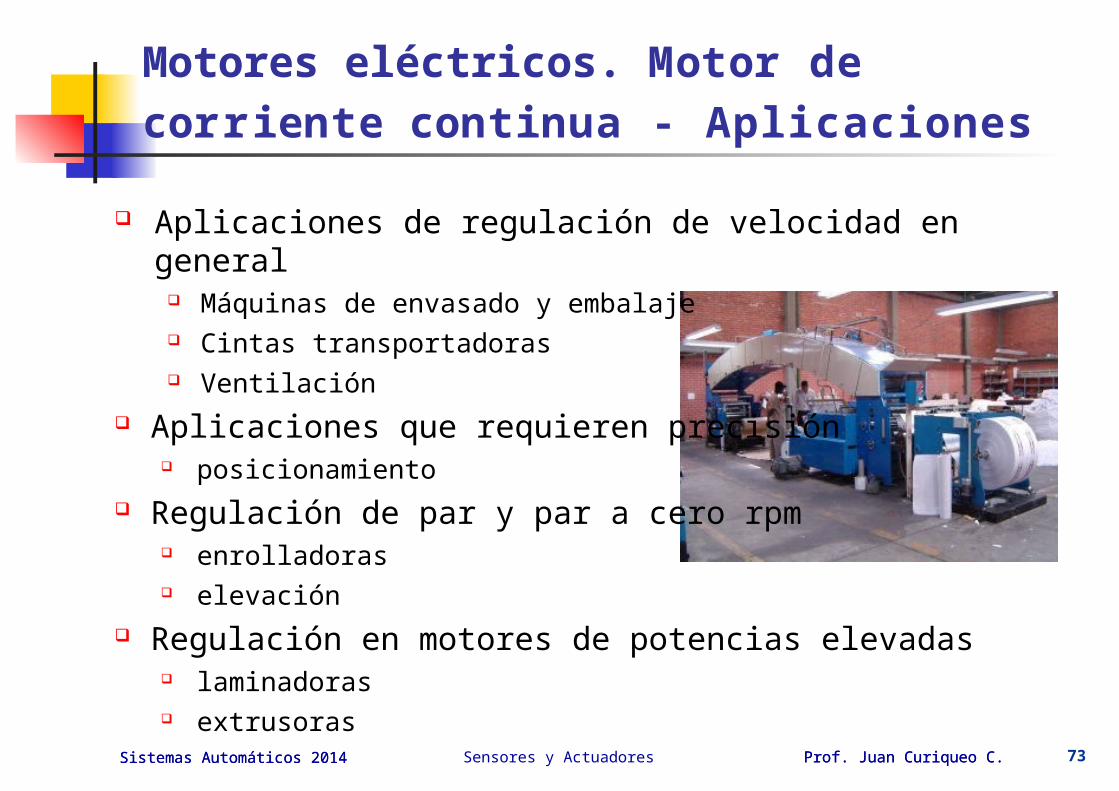
Motores eléctricos. Motor de corriente continua - Aplicaciones
Aplicaciones de regulación de velocidad en general Máquinas de envasado y embalaje Cintas transportadoras Ventilación
Aplicaciones que requieren precisión posicionamiento
Regulación de par y par a cero rpm enrolladoras elevación
Regulación en motores de potencias elevadas laminadoras extrusoras
73

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
MOTORES ASÍNCRONOS TRIFÁSICO Y MONOFÁSICO
74

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 75
Motores eléctricos. Motor de corriente alterna (asíncrono)-Trifásico

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 76
Motores eléctricos. Motor de corriente alterna (asíncrono)-Trifásico

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 77
Motores eléctricos. Motor de corriente alterna (asíncrono)-Monofásico
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 78
Motores eléctricos. Motor de corriente alterna (asíncrono)- Características
Desde fracciones de potencia hasta centenares de KW
Costo de compra bajo
Arranque por contactores, arrancadores por contactores.
Costo de arranque por contactores bajo.
Regulación de velocidad hasta decenas de KW mediante variador.
Buena precisión en el 10 y 100% de la velocidad nominal
Par nominal en el tramo de variación de velocidad
Costo del variador alto.

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 79
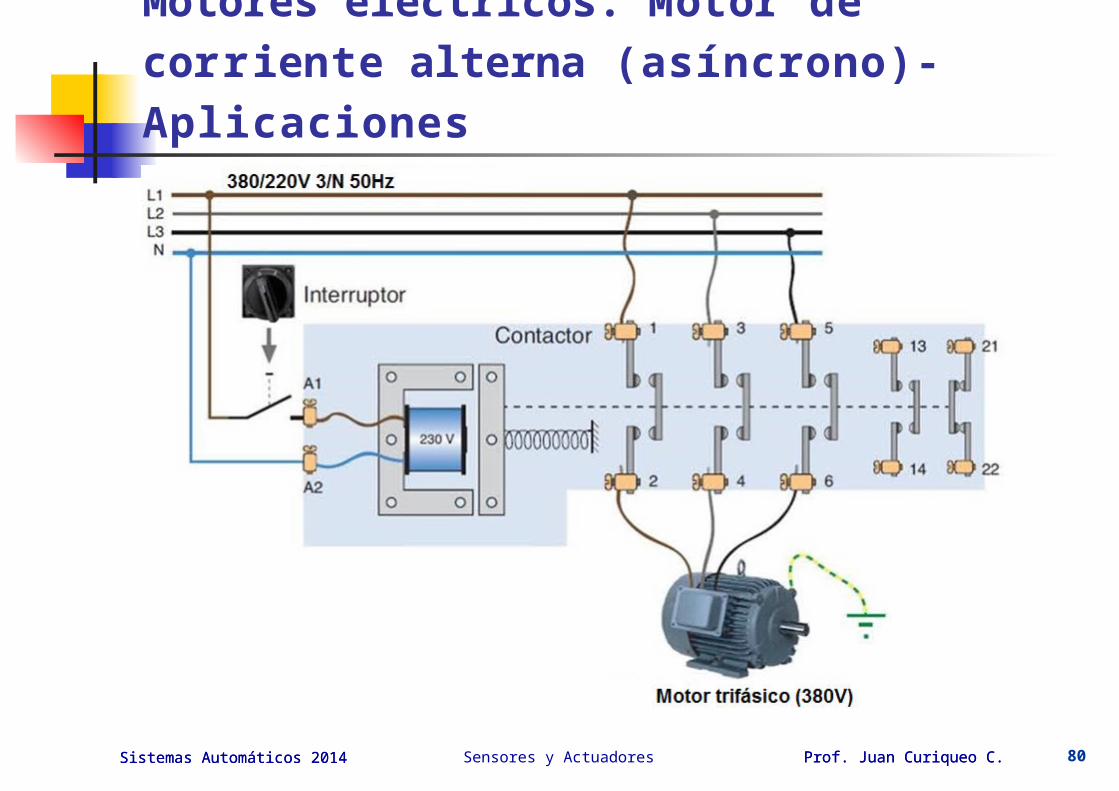
Motores eléctricos. Motor de corriente alterna (asíncrono)-Aplicaciones
Accionamiento directo por contactores
Arranque con arrancadores suaves
Variadores de velocidad de baja potencia y precisos.
Aplicaciones sin regulación.
Aplicaciones con regulación de velocidad mediante engranajes
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 80
Motores eléctricos. Motor de corriente alterna (asíncrono)-Aplicaciones

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Motor de corr iente alterna (rotor bobinado)
81
Motores eléctricos. Motor de corriente alterna (asíncrono). Rotor bobinado

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 82
Motores eléctricos. Motor de corriente alterna (asíncrono). Rotor bobinado
a) Rotor bobinadob) Escobillasc) Anillos rozantes

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 83
Motores eléctricos. Motor de corriente alterna (asíncrono). Rotor bobinado

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 84
Motores eléctricos. Motor de corriente alterna (asíncrono). Rotor bobinado
Características
Desde decenas a centenares de KW.
Como arrancador progresivo
Regulación de velocidad por deslizamiento
Prestaciones de regulación media
Usado en maniobras de elevación

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 85
Motores eléctricos. Motor de corriente alterna (asíncrono). Rotor bobinado
Aplicaciones
Arranque de motores de decenas a centenares de KW.
Por medio del sistema de resistencias rotóricas, arranque con puntas de corriente reducidas.
La corriente es inferior a la necesaria para un motor con rotor de jaula con arrancador estrella – triángulo.
Regulaciones de maniobras de elevación con motores de decenas y centenares de KW.
Permite sustituir sistemas de corriente continua.
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
MOTOR PASO A PASO
86
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 87
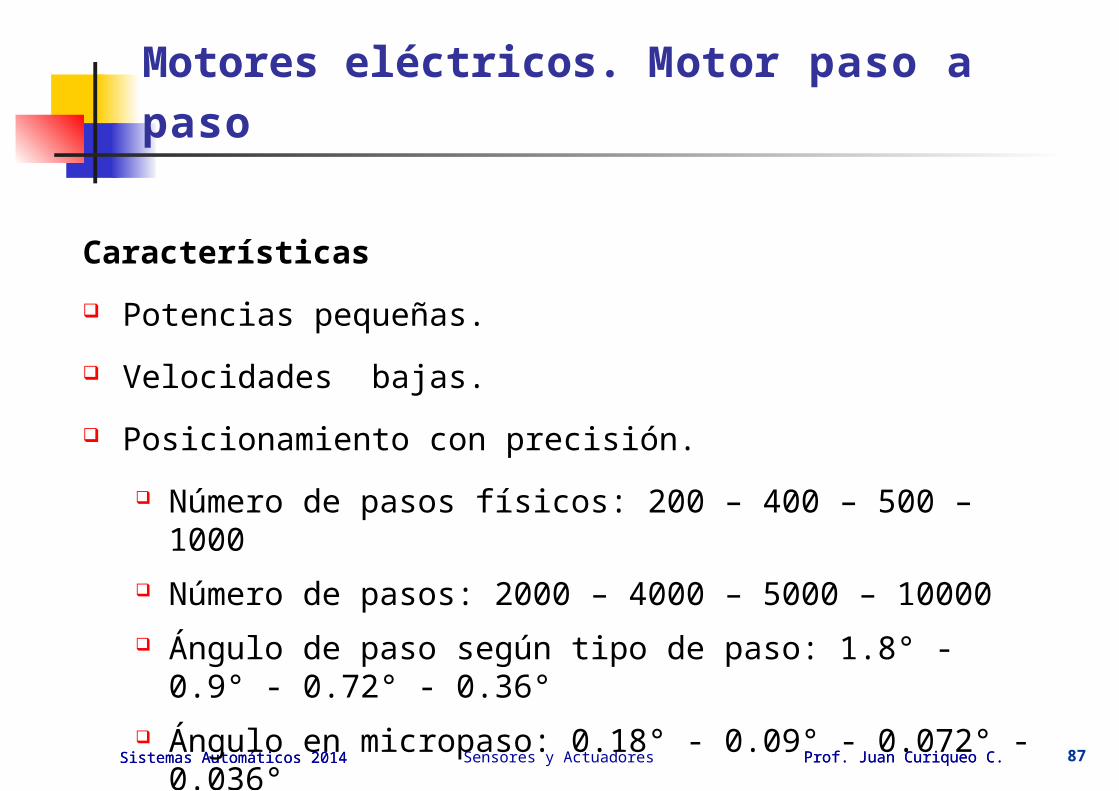
Motores eléctricos. Motor paso a paso
Características
Potencias pequeñas.
Velocidades bajas.
Posicionamiento con precisión.
Número de pasos físicos: 200 – 400 – 500 – 1000
Número de pasos: 2000 – 4000 – 5000 – 10000
Ángulo de paso según tipo de paso: 1.8° - 0.9° - 0.72° - 0.36°
Ángulo en micropaso: 0.18° - 0.09° - 0.072° - 0.036°
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
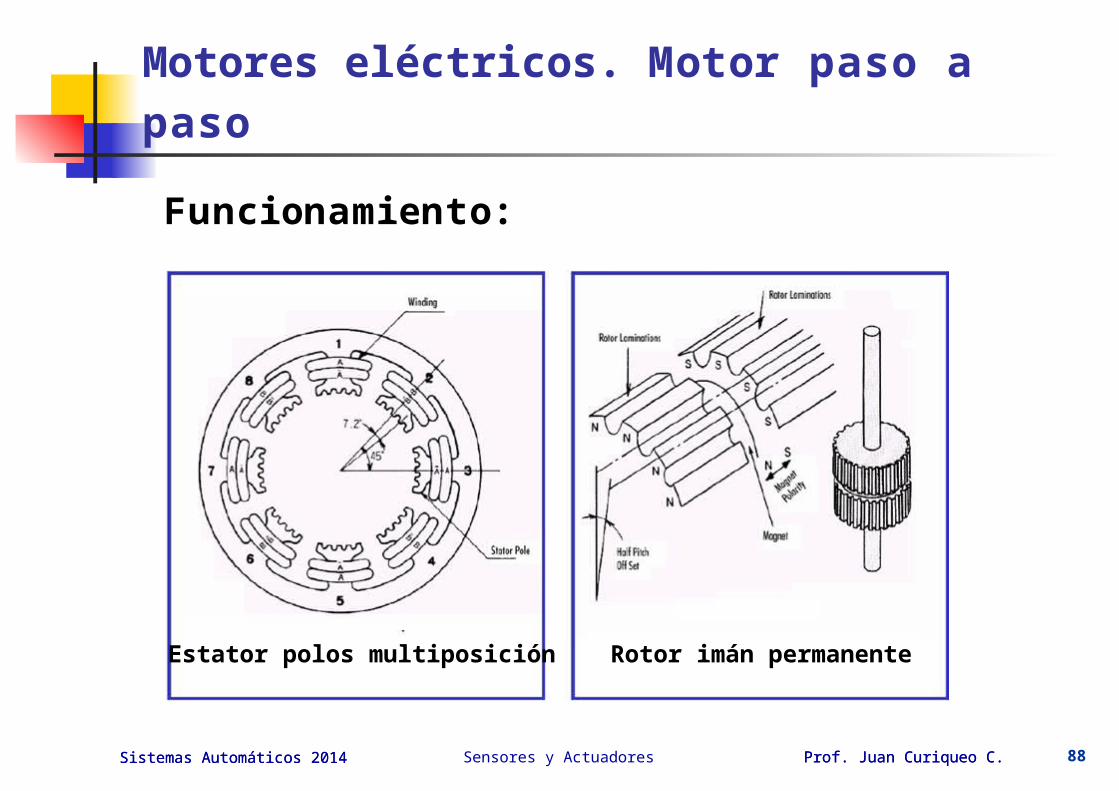
Funcionamiento:
88
Motores eléctricos. Motor paso a paso
Estator polos multiposición Rotor imán permanente

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Funcionamiento:
89
Motores eléctricos. Motor paso a paso

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 90
Motores eléctricos. Motor paso a paso
Funcionamiento:

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 91
Motores eléctricos. Motor paso a paso
Funcionamiento:
Paso completo: 2 fases conectadas a la vez
Medio paso: Secuencias de 1 fase y 2 fases
Micropaso: Conmutación continua

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 92
Motores eléctricos. Motor paso a paso
Aplicaciones
Posicionamiento preciso en:
Industria textil
Maquinas de envasado
Maquinas de embalaje
Equipos médicos
Impresoras

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
SERVOMOTOR
93

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 94
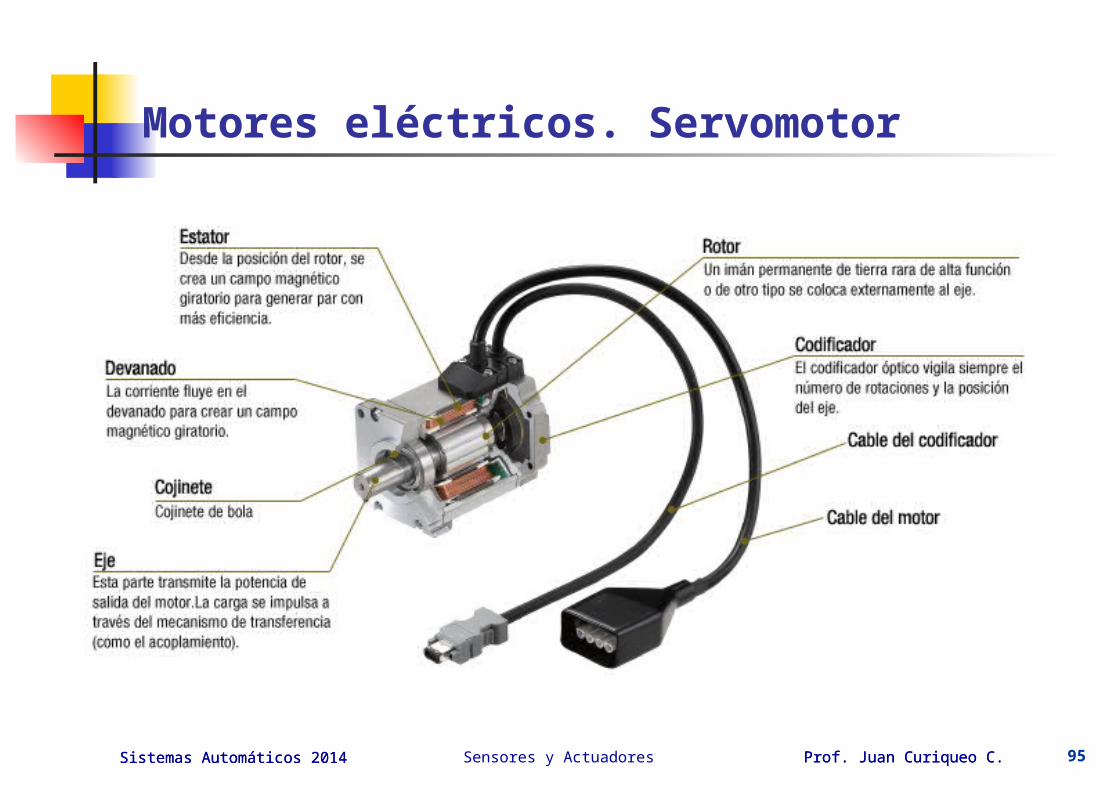
Motores eléctricos. Servomotor
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 95
Motores eléctricos. Servomotor
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.
Un servomotor es un motor eléctrico que puede ser controlado tanto en velocidad como en posición.
Los servos se utilizan frecuentemente en sistemas de radio control y en robótica, pero su uso no está limitado a éstos.
Es posible modificar un servomotor para obtener un motor de corriente continua que, si bien ya no tiene la capacidad de control del servo, conserva la fuerza, velocidad y baja inercia que caracteriza a estos dispositivo
96
Motores eléctricos. Servomotor

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Está formado por un motor, una caja reductora y un circuito de control. Un servo, por consiguiente, tiene un consumo de energía reducido.
La corriente que requiere depende del tamaño del servo. y principalmente del par, puede exceder 1 Amp. si el servo está enclavado, pero no es muy alta si el servo está libre moviéndose.
En otras palabras, un servomotor es un motor especial al que se ha añadido un sistema de control (tarjeta electrónica), un potenciómetro y un conjunto de engranajes.
Los servomotores no permitían que el motor girara 360 grados, solo aproximadamente 180; sin embargo, hoy en día existen servomotores en los que puede ser controlada su posición y velocidad en los 360 grados 97
Motores eléctricos. Servomotor

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 98
Motores eléctricos. Servomotor-Características
Características:
Los primeros servos utilizaban motores de corriente continua de baja inercia.
El uso de escobillas reducía su fiabilidad, esto motivó pasar a motores síncronos de imanes permanentes.
Existen dos tipos de drives para motores síncronos de imanes permanentes, diferenciados por la forma de señal de corriente que comunican el motor y por el tipo de sistema de retroalimentación.
Drive con conmutación tipo bloque – Brushless CC
Drive con conmutación sinusoidal – Brushless CA
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Un motor brushless es un motor eléctrico que no emplea escobillas para realizar el cambio de polaridad en el rotor.
Los motores eléctricos suelen tener un colector de delgas o un par de anillos rozantes. Estos sistemas, producen rozamiento, disminuyen el rendimiento, desprenden calor y ruido, requieren mucho mantenimiento y pueden producir partículas de carbón, este polvo, además, puede ser conductor.
Los primeros motores sin escobillas fueron los motores de corriente alterna asíncronos. Gracias a la electrónica, se muestran muy ventajosos, ya que son más baratos de fabricar, pesan menos y requieren menos mantenimiento, pero su control era mucho más complejo. Esta complejidad prácticamente se ha eliminado con los controles electrónicos.
99
Motores eléctricos. Servomotor – Motor Brushless

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Actuadores Industriales. Actuadores Eléctricos.Servomotores – Brushless CC/CA
La tecnología Brushless DC fue la primera que se aplicó para el control de motores Brushless síncronos, el desarrollo de la tecnología del tratamiento digital de la señal ha permitido el desarrollo de la tecnología Brushless CA.
Los drives Brushless CC requieren de un encoder de baja resolución para realizar la conmutación por motivos de costo se opta por sensores efecto Hall, normalmente hay 6 puntos de conmutación por vuelta. Los Brushless CA necesitan un encoder de alta resolución (4096 – 16384 puntos de conmutación por vuelta).
Los Brushless CC producen un rizado de par mayor que los Brushless CA, pero la electrónica de control es más sencilla, por ello son más baratos 100
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 101
Motores eléctricos. Servomotor-Características
Características:
Motor síncrono de imanes permanentes
Potencias pequeñas con pares de hasta 70Nm
Velocidades de hasta 6000 rpm.
Las ordenes de posicionamiento se generan en:
Control numérico
Equipo dedicado
Autómata con tarjeta de control de ejes

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 102
Motores eléctricos. Servomotor-Características
Características:
Gran precisión de posicionamiento
Estabilidad de velocidad
Alta estabilidad de par
Repetitividad de movimiento
Elevada respuesta dinámica

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
El servomotor tiene: Altas prestaciones dinámicas Amplio rango de velocidad Alta precisión de posicionamiento Alta capacidad de sobrepar
Es la mejor solución en accionamientos rápidos y precisos.
La configuración de los sistemas es cada vez más fácil con la ayuda de los programas de alto nivel.
103
Motores eléctricos. Servomotor-Características
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Los motores tienen pérdidas en el cobre y en el hierro En motores con escobillas tenemos hierro y bobinas en el
rotor, causando altas temperaturas y limitando sus prestaciones.
Los que no tienen escobillas tienen hierro y bobinas en el estator donde la disipación del calor es más fácil.
El diseño del rotor sin escobillas reduce su inercia y permite una respuesta dinámica más rápida.
La vida de un rotor bobinado es más corta debido a las escobillas y el colector.
La desventaja de los servos es el costo más alto.
104
Motores eléctricos. Servomotor - Diferencia entre servo CC - CA

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 105
Motores eléctricos. Servomotor - Aplicaciones

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
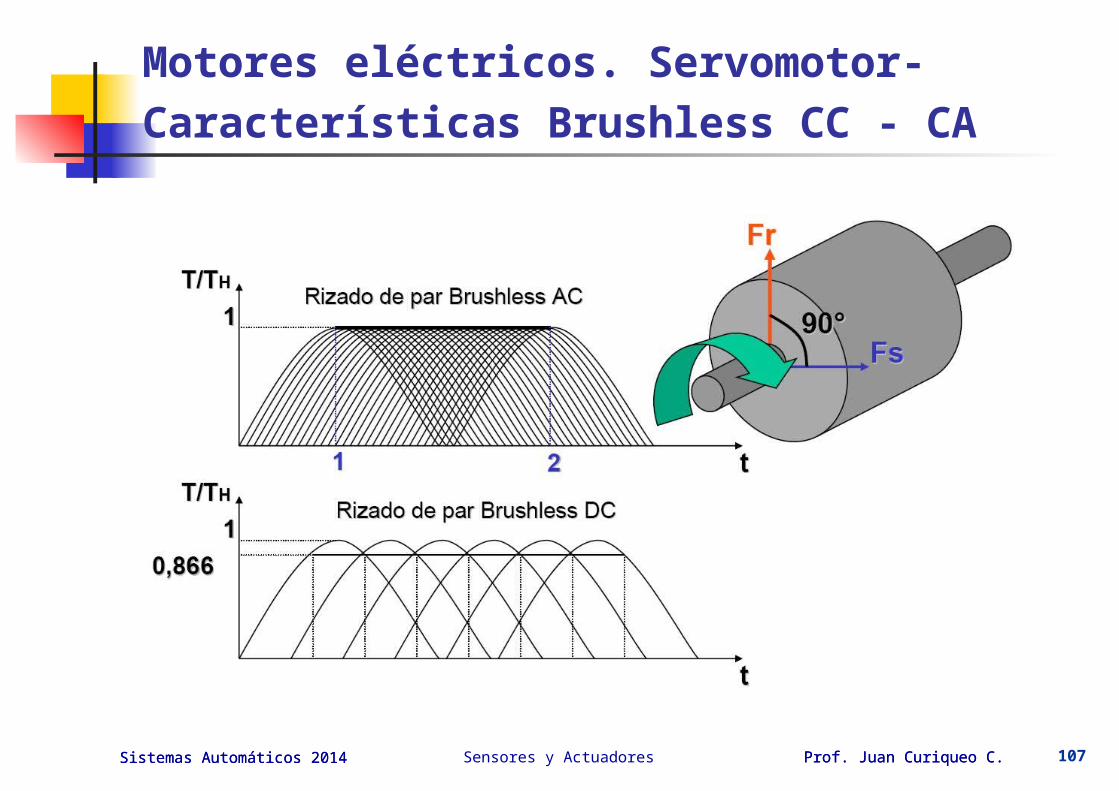
Motores eléctricos. Servomotor-Características Brushless CC - CA
El par máximo y la máxima eficacia se da cuando el ángulo es de 90° eléctricos a corriente constante.
Como los dirves Brushless CC solo tienen 6 posiciones posibles de conmutación por revolución eléctrica NO ES POSIBLE que el ángulo sea 90° en todo momento. El Brushless CA al tener más posiciones de conmutación puede controlar siempre la conmutación alrededor de 90°
CONSECUENCIA: Rizado de par (Cantidad de par de torsión medida restando el par de torsión mínimo durante una revolución desde el par de torsión máximo desde la
misma revolución del motor) en los motores Brushless CC, crítico a bajas revoluciones
106
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 107
Motores eléctricos. Servomotor-Características Brushless CC - CA

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014 108
Motores eléctricos. Servomotor-Comparación

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
ACTUADOR NEUMÁTICO
109
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
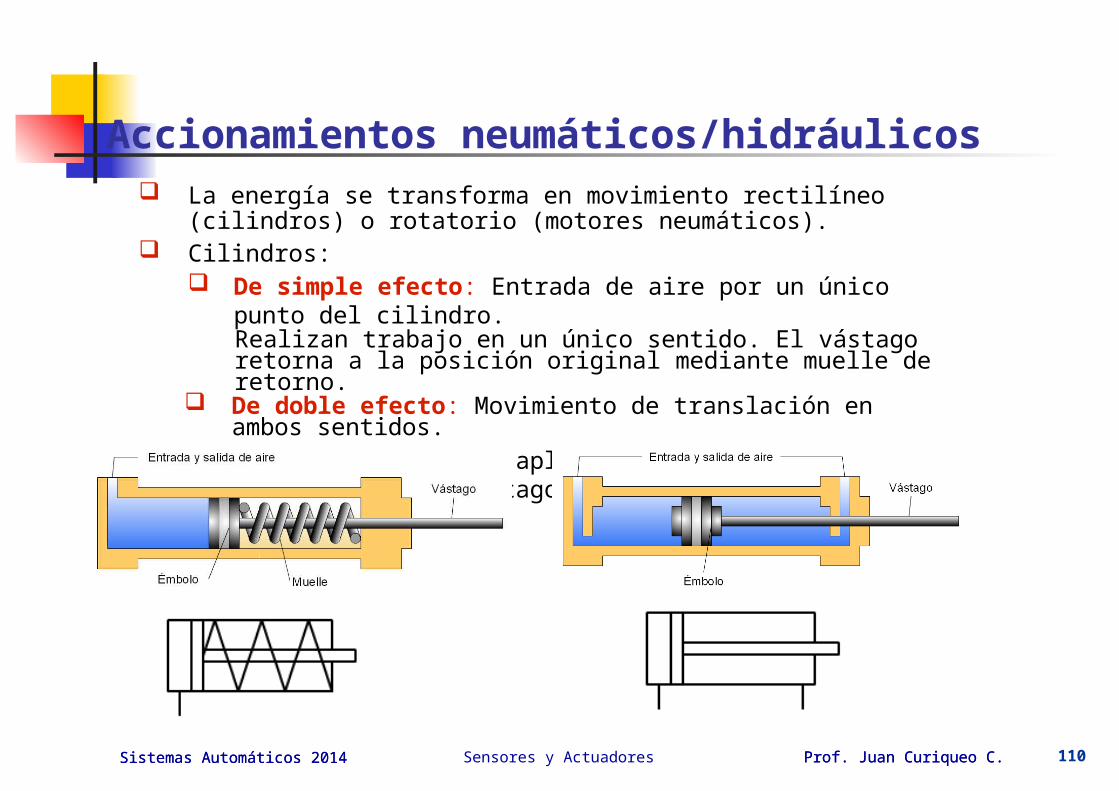
Accionamientos neumáticos/hidráulicos La energía se transforma en movimiento rectilíneo (cilindros) o
rotatorio (motores neumáticos). Cilindros:
De simple efecto: Entrada de aire por un único punto del cilindro.Realizan trabajo en un único sentido. El vástago retorna a la posición original mediante muelle de retorno.
De doble efecto: Movimiento de translación en ambos sentidos. Pandeo del vástago: No aplicar cargas laterales. Cilindros de doble
vástago.
110

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Accionamientos neumáticos/hidráulicos
Se utilizan en operaciones que impliquen desplazamientos lineales cortos Se actúa sobre el cilindro neumático mediante electroválvulas conectadas a las salidas del autómata.
Cilindros neumáticos Manipuladores Electroválvulas
111

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Válvulas distribuidoras
Permiten el accionamiento del cilindro eléctricamente (autómata). Válvulas: Activadas mediante relé. Servoválvulas: Regulación de presión o caudal proporcional.
Gobernado con salida analógica. Permiten mantener un cilindro en una posición intermedia.
Símbolos utilizados: Número de posiciones de la válvula=nº cuadrados =Nº estados
de la válvula Líneas: Representan la conexión y el recorrido del fluido. Conexiones con el exterior El funcionamiento se representa desplazando
lateralmente los cuadrados hasta que las conexiones coincidan. Ejemplo: Posición de reposo cerrada. Al desplazarse,
abierta. Entradas/salidas: representadas con líneas saliendo
del cuadrado.
112

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
Válvulas distribuidoras
113

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Válvulas distribuidoras
Tipos básicos: 2/2 vías: 2 posiciones, 2 vías Cerrada en posición
normal (arriba). Abierta en posición normal (abajo). 3/2 vías: 2 posiciones, 3 vías (conductos)
(Arriba) En pos normal, entrada cerrada y salida a escape. En segunda posición entrada conectada a trabajo. P.e. conexión a un cilindro de simple efecto
(Abajo) Al revés. 3/3 vías: 3 posiciones, 3 vías
P.e. conectado a un cilindro de simple efecto, se puede mantener la posición del cilindro.
4/2 vías: 2 posiciones, 4 vías Para accionamiento de cilindros de doble
efecto.
114
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
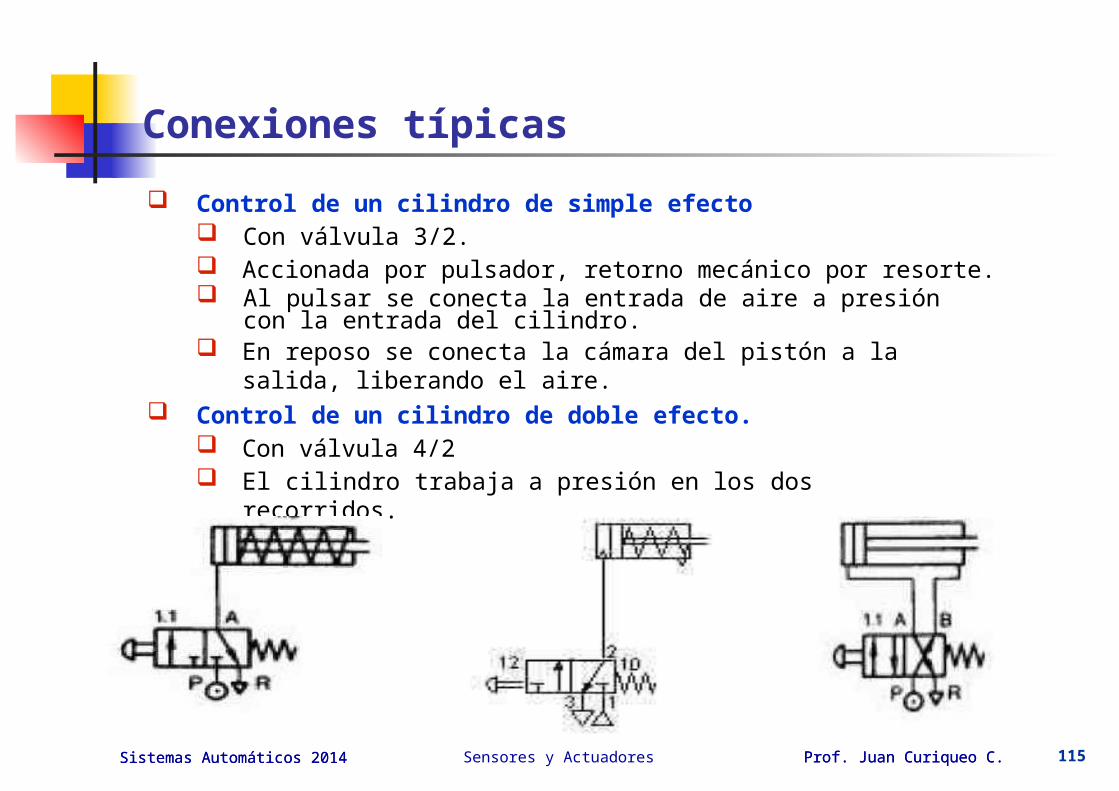
Conexiones típicas
Control de un cilindro de simple efecto Con válvula 3/2. Accionada por pulsador, retorno mecánico por resorte. Al pulsar se conecta la entrada de aire a presión con la entrada del
cilindro. En reposo se conecta la cámara del pistón a la salida, liberando el
aire. Control de un cilindro de doble efecto.
Con válvula 4/2 El cilindro trabaja a presión en los dos recorridos.
115
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014
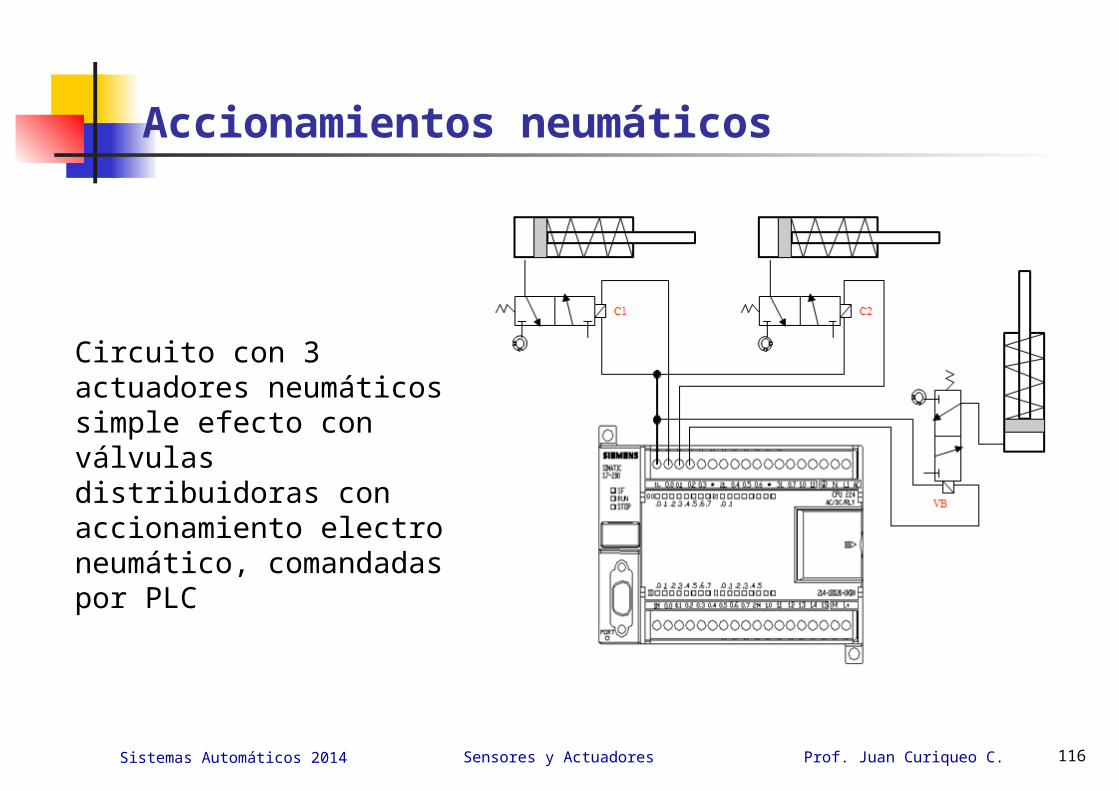
Accionamientos neumáticos
116
Circuito con 3 actuadores neumáticos simple efecto con válvulas distribuidoras con accionamiento electro neumático, comandadas por PLC

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Válvulas de mando
En general, pueden estar actuadas de forma mecánica o eléctricamente
117

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Abastecimiento de aire a presión
En estas instalaciones la energía se transmite mediante el aire a presión. El compresor es el elemento encargado de esta tarea. El aire se suele almacenar en un acumulador, que actúa de depósito para
abastecer los picos de demanda.
Compresor de pistón, de una y dos etapas.
118

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Actuadores neumáticos Motor neumático
119
Motor de paletas
Motor de paletas doble sentido

Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
Sensores magnéticos (Reed)
Sensores de proximidad magnéticos (Sensores de proximidad Reed) Reaccionan ante los campos magnéticos de imanes permanentes y
de electroimanes.
120
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
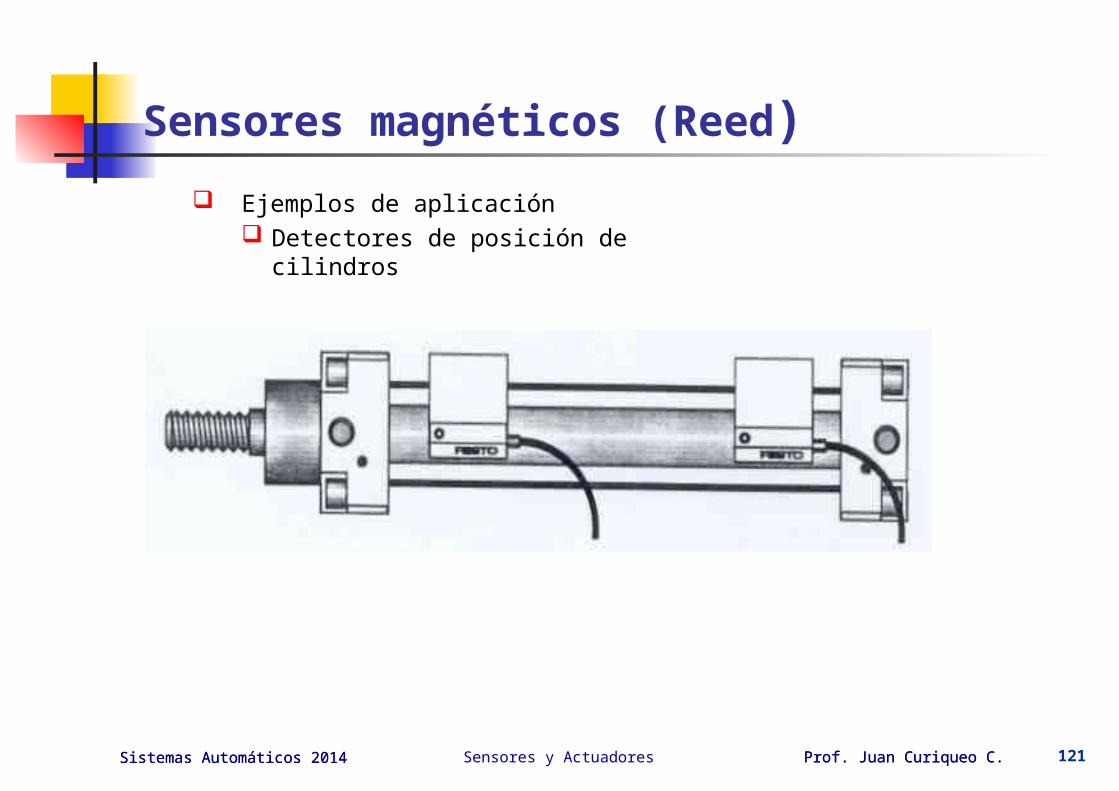
Sensores magnéticos (Reed) Ejemplos de aplicación
Detectores de posición de cilindros
121
Prof. Juan Curiqueo C.Sensores y ActuadoresSistemas Automáticos 2014 Prof. Juan Curiqueo C.Sistemas Automáticos 2014
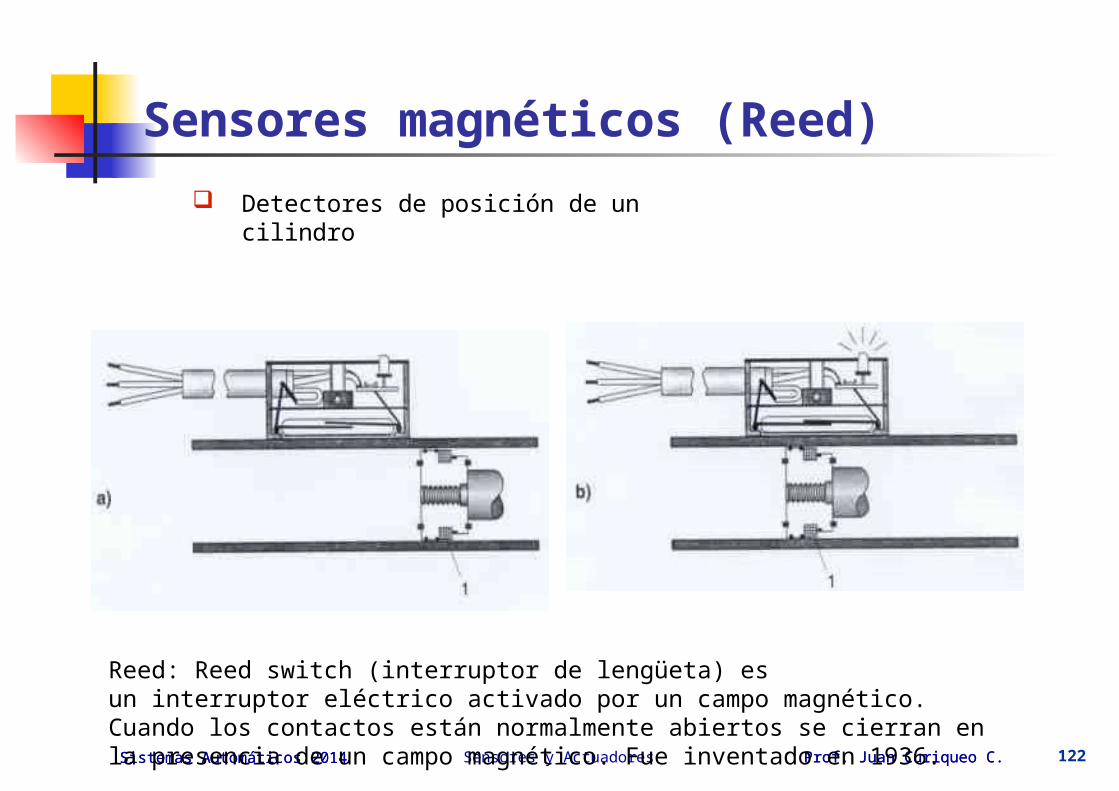
Sensores magnéticos (Reed)
Detectores de posición de un cilindro
122
Reed: Reed switch (interruptor de lengüeta) es un interruptor eléctrico activado por un campo magnético. Cuando los contactos están normalmente abiertos se cierran en la presencia de un campo magnético. Fue inventado en 1936.