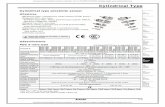
Sensores de proximidad inductivos diámetro 12 mm PR124DN ...

Sensores de proximidad
El sensor de proximidad es un transductor que detecta objetos o señales que se encuentran cerca del elemento sensor. Existen varios tipos de sensores de proximidad según el principio físico que utilizan.
Entre los sensores de proximidad se encuentran:
Sensor capacitivo Sensor inductivo Sensor fin de carrera Sensor infrarrojo Sensor ultrasonico Sensor magnetico
Sensor capacitivo
La función del detector capacitivo consiste en señalar un cambio de estado, basado en la variación del estímulo de un campo eléctrico. Los sensores capacitivos detectan objetos metálicos, o no metálicos, midiendo el cambio en la capacitancia, la cual depende de la constante dieléctrica del material a detectar, su masa, tamaño, y distancia hasta la superficie sensible del detector. Los detectores capacitivos están construidos en base a un oscilador RC. Debido a la
influencia del objeto a detectar, y del cambio de capacitancia, la amplificación se incrementa haciendo entrar en oscilación el oscilador. El punto exacto de ésta función puede regularse mediante un potenciómetro, el cual controla la realimentación del oscilador. La distancia de actuación en determinados materiales, pueden por ello, regularse mediante el potenciómetro. La señal de salida del oscilador alimenta otro amplificador, el cual a su vez, pasa la señal a la etapa de salida. Cuando un objeto conductor se acerca a la cara activa del detector, el objeto actúa como un condensador. El cambio de la capacitancia es significativo durante unalarga distancia. Si se aproxima un objeto no conductor, (>1) solamente se produce un cambio pequeño en la constante dieléctrica, y el incremento en su capacitancia es muy pequeño comparado con los materiales conductores.

Sensor inductivo
Los sensores inductivos de proximidad han sido diseñados para trabajar generando un campo magnético y detectando las pérdidas de corriente de dicho campo generadas al introducirse en él los objetos de detección férricos y no férricos. El sensor consiste en una bobina con núcleo de ferrita, un oscilador, un sensor de nivel de disparo de la señal y un circuito de salida. Al aproximarse un objeto "metálico" o no metálico, se inducen corrientes de histéresis en el objeto. Debido a
ello hay una pérdida de energía y una menor amplitud de oscilación. El circuito sensor reconoce entonces un cambio específico de amplitud y genera una señal que conmuta la salida de estado sólido o la posición "ON" y "OFF". El funcionamiento es similar al capacitivo; la bobina detecta el objeto cuando se produce un cambio en el campo electromagnético y envía la señal al oscilador, luego se activa el disparador y finalmente al circuito de salida hace la transición entre abierto o cerrado.

Sensor fin de carrera
El final de carrera o sensor de contacto (también conocido como "interruptor de límite") o limit swicht, son dispositivos eléctricos, neumáticos o mecánicos situados al final del recorrido de un elemento móvil, como por ejemplo una cinta transportadora, con el objetivo de enviar señales que puedan modificar el estado de un circuito. Internamente pueden contener
interruptores normalmente abiertos (NA), cerrados (NC) o conmutadores dependiendo de la operación que cumplan al ser accionados.
Generalmente estos sensores están compuestos por dos partes: un cuerpo donde se encuentran los contactos y una cabeza que detecta el movimiento. Su uso es muy diverso, empleándose, en general, en todas las máquinas que tengan un movimiento rectilíneo de ida y vuelta o sigan una trayectoria fija, es decir, aquellas que realicen una carrera o recorrido fijo, como por ejemplo ascensores, montacargas, robots, etc.
Sensor infrarrojo
El receptor de rayos infrarrojos suele ser un fototransistor o un fotodiodo. El circuito de salida utiliza la señal del receptor para amplificarla y adaptarla a una salida que el sistema pueda entender. la señal enviada por el emisor puede ser codificada para distinguirla de otra y así identificar varios sensores a la vez esto es muy utilizado en la robotica en casos en que se necesita tener mas de un emisor infrarrojo y solo se quiera tener un receptor.
Los sensores infrarrojos pueden ser:
Sensor infrarrojo de barrera: Las barreras tipo emisor-receptor están compuestas de dos partes, un componente que emite el haz de luz, y otro componente que lo recibe. Se establece

un área de detección donde el objeto a detectar es reconocido cuando el mismo interrumpe el haz de luz. Debido a que el modo de operación de esta clase de sensores se basa en la interrupción del haz de luz, la detección no se ve afectada por el color, la textura o el brillo del objeto a detectar. Estos sensores operan de una manera precisa cuando el emisor y el receptor se encuentran alineados. Esto se debe a que la luz emitida siempre tiende a alejarse del centro de la trayectoria.
Sensor auto réflex: La luz infrarroja viaja en línea recta, en el momento en que un objeto se interpone el haz de luz rebota contra este y cambia de dirección permitiendo que la luz sea enviada al receptor y el elemento sea censado, un objeto de color negro no es detectado ya que este color absorbe la luz y el sensor no experimenta cambios.
Sensor ultrasónico
Los sensores ultrasónicos tienen como función principal la detección de objetos a través de la emisión y reflexión de ondas acústicas. Funcionan emitiendo un pulso ultrasónico contra el objeto a sensar, y al detectar el pulso reflejado, se para un
contador de tiempo que inicio su conteo al emitir el pulso. Este tiempo es referido a distancia y de acuerdo con los parámetros elegidos de respuesta con ello manda una señal eléctrica digital o analógica.
Sensor magnético
Los sensores de proximidad magnéticos son caracterizados por la posibilidad de distancias grandes de la conmutación, disponible de los sensores con dimensiones pequeñas. Detectan los

objetos magnéticos (imanes generalmente permanentes) que se utilizan para accionar el proceso de la conmutación. Los campos magnéticos pueden pasar a través de muchos materiales no magnéticos, el proceso de la conmutación se puede también accionar sin la necesidad de la exposición directa al objeto. Usando los conductores magnéticos (ej. hierro), el campo magnético se puede transmitir sobre mayores distancias para, por ejemplo, poder llevarse la señal de áreas de alta temperatura.
BIBLIOGRAFIA
http://sensoresdeproximidad.galeon.com/
MEDIDORES DE POSICIÓN ANGULAR: CODIFICADORES ÓPTICOS
Los codificadores ópticos, también conocidos como encoders, se utilizan para la medición de la posición angular en ejes, aunque también los hay lineales; al integrar la variación de posición en el tiempo se puede conocer la distancia angular recorrida por el eje, o bien, al derivarla con respecto al tiempo una y dos veces, se obtiene la velocidad y la aceleración angulares respectivamente. Se utilizan ampliamente para el control de motores y mecanismos, así como parte funcional de algunos dispositivos como los ratones de computador.
Detalle de encoders incrementales en un mouse.
Es preciso aclarar que los encoders son instrumentos muy delicados, por lo que no pueden ser sometidos a cargas axiales, de torsión o flexión; para garantizar esto debe tenerse especial cuidado en su acoplamiento.

Hay dos tipos de encoders angulares: incrementales y absolutos. Los encoders incrementales generan un número determinado de pulsos eléctricos por revolución (n = 180, 360, 720), de manera que para saber cuánto ha girado el eje desde cierta posición se deben contar el número de pulsos. Para producir estos pulsos, se acopla al eje del encoder un disco de material opaco con n ventanas distribuidas en forma radial; a cadalado del disco se sitúan un par de sensores ópticos, compuestos de un emisor (generalmente un LED) y un receptor (una fotocelda) enfrentados de manera que el rayo de luz pase a través de las ventanas y se interrumpa intermitentemente cuando el eje gira.
Generación de pulsos de un encoder incremental.
El resultado es una onda cuadrada (señal digital entre 0 y 5 VDC), como se ve en la figura. Este sistema es muy barato por su simplicidad pero presenta un problema: no permite saber en qué sentido gira el eje. La solución es utilizar un segundo detector óptico que también genera una onda cuadrada pero desplazada ¼ de ciclo; de esta manera, el circuito procesador recibe dos señales al tiempo que le permiten determinar el sentido de giro dependiendo de cuál se activa primero. A este sistema se le conoce como encoder incremental en cuadratura.
Señales de un encoder incremental en cuadratura.
Los encoders incrementales sólo permiten conocer el desplazamiento relativo, mientras que los absolutos permiten saber en cualquier instante qué posición angular tiene el eje con respecto a una posición de referencia. Los encoders absolutos consisten típicamente de los mismos componentes que los incrementales, pero se diferencian en la construcción del disco y la disposición de

los sensores. El disco absoluto de la figura está hecho con varias pistas con segmentos opacos y reflectivos que se alternan y sobre cada pista hay un juego de sensores ópticos; la señal producida por cada sensor corresponde a un bit dentro de un byte o palabra digital, dejando la circunferencia dividida en 2n
posiciones, donde n es el número de pistas, de manera que en cada posición se genera un código binario único que permite su identificación.
Disco absoluto y tabla de códigos binarios de posición.
MEDIDORES DE POSICIÓN LINEAL
SENSORES LINEALES RESISTIVOSComúnmente conocidos como potenciómetros lineales, estos sensores de posición lineal tienen un principio de funcionamiento muy simple. Están dotados en un vástago que se acopla por uno de sus extremos al elemento cuyo desplazamiento debe medirse, y por el otro está acoplado a un contacto móvil que se desplaza sobre una resistencia variable.La caída de voltaje entre el contacto móvil y un contacto fijo al final de la resistencia, es proporcional a la posición; este voltaje luego es amplificado y acondicionado para obtener la respectiva señal.
Existen variantes para el sensor resistivo, tales como el sensor de desplazamiento de inductancia variable (LDIT) y de voltaje variable (LDVT).
El LDIT está basado en el Puente de Wheatstone. Dos bobinas son conectadas en serie con el núcleo ferromagnético como parte móvil; en el punto cero de desplazamiento, la inductancia de ambas bobinas es igual, pero al moverse el núcleo, las inductancias cambian y la diferencia es proporcional al

desplazamiento. El LDVT funciona de manera similar al anterior pero usando transformadores. Se conecta la alimentación a una bobina primaria que comparte su núcleo con dos bobinas secundarias separadas; en el punto cero, los voltajes de ambas son iguales, pero con el desplazamiento el voltaje diferencial crece en forma proporcional al desplazamiento.
SENSORES ÓPTICOS DE POSICIÓN
A diferencia de los sensores anteriores, los ópticos no requieren acoplamiento mecánico al objeto móvil cuya posición se requiere medir, lo cual resulta ventajoso en muchos casos.
El funcionamiento básico de estos sensores consiste en medir la variación del ángulo de incidencia de un haz de luz en función de desplazamiento del objetivo. Para ello un emisor, que bien puede ser un LED infrarrojo o un diodo láser, genera un haz de luz que se enfoca sobre objeto para que se refleje sobre su superficie y regrese con cierto ángulo sobre un lente que lo enfoca sobre un arreglo de celdas fotosensibles; según la celda que reciba la mayor incidencia de luz, se puede obtener el ángulo de incidencia como función del desplazamiento. Luego la señal es acondicionada y linealizada mediante un microprocesador integrado.
Funcionamiento de un sensor óptico de posición
Este principio de funcionamiento puede verse alterado por las condiciones de la superficie del objetivo, la cantidad de luz incidente en el caso del infrarrojo, y la temperatura ambiente; sin embargo, es capaz de producir mediciones con una resolución mucho mejor que otros sensores.

BIBLIOGRAFIAhttp://amasd.upb.edu.co/es/pregrado/labcontrol1/labcontrol1_P07_Proximidad_Posicion.pdf
Cuestionario:
1. Entre los sensores de proximidad se encuentran:
Sensor capacitivo Sensor inductivo Sensor fin de carrera Sensor infrarrojo Sensor ultrasonico Sensor magnetico
2. En qué consiste la función del detector capacitivo?La función del detector capacitivo consiste en señalar un cambio de estado, basado en la variación del estímulo de un campo eléctrico.
3. Cual es la diferencia entre Potenciometricos y los ópticos?
Los ópticos no requieren acoplamiento mecánico al objeto móvil cuya posición se requiere medir, lo cual resulta ventajoso en muchos casos.
4. Para que se utilizan los encoders?Se utilizan para la medición de la posición angular en ejes
5. Cual es la función principal de los sensores ultrasónicos?Los sensores ultrasónicos tienen como función principal la detección de objetos a través de la emisión y reflexión de ondas acústicas.