
SENSIBILIDAD DE LA SOLUCIÓN EN SÍNTESIS DE CONDUCCIÓN DE...
10
MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO SENSIBILIDAD DE LA SOLUCIÓN EN SÍNTESIS DE CONDUCCIÓN DE CUERPO RÍGIDO J Isidro Torres Navarro Departamento de Metalmecánica, Instituto Tecnológico de Pachuca, Carr. México–Pachuca km. 87.5, Col Venta Prieta, Pachuca de Soto, Hgo, México Teléfono: (771) 711 3073 ext. 131, [email protected] RESUMEN Mediante el empleo de las curvas de Burmester, para la solución del problema de conducción de un cuerpo rígido por cuatro fases, se describe la variación que ocasiona en las curvas la modifica- ción leve en los ángulos de fase y las posibilida- des que ofrece esto para el diseñador. Para el aná lisis de sensibilidad del resultado al problema de síntesis, se recurre a un procedimiento de solu- ción exacta mediante un polinomio cúbico y al empleo del programa MATLAB®. Esta colabora- ción es de interés para la didáctica del proceso de diseño cinemático en forma interactiva. ABSTRACT Through the usage of Burmester curves for the so lution of the motion synthesis problem, the chan- ge on the Burmester curves, produced by the slight variations on the phase angles and its ad- vantages for the designer, are described. An exact solution procedure, which employs a cubic polynomial and MATLAB for execution, is used for the analysis of the synthesis solution's sensiti- vity. This work is of interest as an interactive and didactic demo of the kinematic design process. INTRODUCCIÓN En la síntesis de conducción de cuerpo rígido (CR), el diseñador prescribe una trayectoria a se- guir por el CR con orientaciones determinadas. Cuando se plantea el problema para cuatro fases, para la solución exacta, el número de mecanis- mos posibles es muy amplio. El resultado puede obtenerse mediante el uso de las curvas de Bur- mester. Estas curvas son la representación del lu- gar geométrico de los puntos de un plano que pueden ser conectados mediante un arco de cir- cunferencia en cuatro posiciones dadas del plano. Ver figura 1. Existen dos curvas: una para los pa- res R del bastidor (curva de puntos centrales), y otra para los pares R del cuerpo acoplador (curva de puntos circulares). El estudio y construcción de las curvas es realizado en Hartenberg y Dena- vit [1], así como en Hunt [2]. La importancia de las curvas de Burmester reside en que puntos en las dos curvas representan los extremos de barras (díadas), con movimiento cir- cular que, unidas por un lado al bastidor y por otro al cuerpo acoplador, constituyen el mecanis- mo de cuatro barras que resolverá el problema de conducción de CR por cuatro fases. Ver figura 2. Figura 1. Conducción de CR por cuatro fases y curvas de Burmester: línea continua, curva de puntos centra- les; (o), curva de puntos circulares. Figura 2. Ejemplo de mecanismo solución. De acuerdo a esto, el problema se resuelve deter- minando las coordenadas de los puntos extremos: B para el par R del lado del bastidor y A para el par R del lado del acoplador, que identifican a una díada solución. Como las curvas de Burmester son líneas continuas, de extensión infinita, el lugar geométrico proporciona una diversidad práctica de barras solución, dado que a cada punto de la curva de puntos centrales corresponde un punto de la curva de puntos circulares. ISBN 978-607-95309-9-0 Página | 430 Derechos Reservados © 2013, SOMIM
-
Upload
hoanghuong -
Category
Documents
-
view
238 -
download
0
Transcript of SENSIBILIDAD DE LA SOLUCIÓN EN SÍNTESIS DE CONDUCCIÓN DE...

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
SENSIBILIDAD DE LA SOLUCIÓN EN SÍNTESIS DE CONDUCCIÓN DE CUERPO RÍGIDO J Isidro Torres Navarro
Departamento de Metalmecánica, Instituto Tecnológico de Pachuca,
Carr. México–Pachuca km. 87.5, Col Venta Prieta, Pachuca de Soto, Hgo, México Teléfono: (771) 711 3073 ext. 131, [email protected]
RESUMEN Mediante el empleo de las curvas de Burmester, para la solución del problema de conducción de un cuerpo rígido por cuatro fases, se describe la variación que ocasiona en las curvas la modifica-ción leve en los ángulos de fase y las posibilida-des que ofrece esto para el diseñador. Para el aná lisis de sensibilidad del resultado al problema de síntesis, se recurre a un procedimiento de solu-ción exacta mediante un polinomio cúbico y al empleo del programa MATLAB®. Esta colabora-ción es de interés para la didáctica del proceso de diseño cinemático en forma interactiva. ABSTRACT Through the usage of Burmester curves for the so lution of the motion synthesis problem, the chan-ge on the Burmester curves, produced by the slight variations on the phase angles and its ad-vantages for the designer, are described. An exact solution procedure, which employs a cubic polynomial and MATLAB for execution, is used for the analysis of the synthesis solution's sensiti-vity. This work is of interest as an interactive and didactic demo of the kinematic design process. INTRODUCCIÓN En la síntesis de conducción de cuerpo rígido (CR), el diseñador prescribe una trayectoria a se-guir por el CR con orientaciones determinadas. Cuando se plantea el problema para cuatro fases, para la solución exacta, el número de mecanis-mos posibles es muy amplio. El resultado puede obtenerse mediante el uso de las curvas de Bur-mester. Estas curvas son la representación del lu-gar geométrico de los puntos de un plano que pueden ser conectados mediante un arco de cir-cunferencia en cuatro posiciones dadas del plano. Ver figura 1. Existen dos curvas: una para los pa-res R del bastidor (curva de puntos centrales), y otra para los pares R del cuerpo acoplador (curva de puntos circulares). El estudio y construcción de las curvas es realizado en Hartenberg y Dena-vit [1], así como en Hunt [2].
La importancia de las curvas de Burmester reside en que puntos en las dos curvas representan los extremos de barras (díadas), con movimiento cir-cular que, unidas por un lado al bastidor y por otro al cuerpo acoplador, constituyen el mecanis-mo de cuatro barras que resolverá el problema de conducción de CR por cuatro fases. Ver figura 2.
Figura 1. Conducción de CR por cuatro fases y curvas de Burmester: línea continua, curva de puntos centra-les; (o), curva de puntos circulares.
Figura 2. Ejemplo de mecanismo solución. De acuerdo a esto, el problema se resuelve deter-minando las coordenadas de los puntos extremos: B para el par R del lado del bastidor y A para el par R del lado del acoplador, que identifican a una díada solución. Como las curvas de Burmester son líneas continuas, de extensión infinita, el lugar geométrico proporciona una diversidad práctica de barras solución, dado que a cada punto de la curva de puntos centrales corresponde un punto de la curva de puntos circulares.
ISBN 978-607-95309-9-0 Página | 430 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Para la solución se procede con lo expuesto en el apéndice, Rojas [3, 4], (las soluciones se desarro-llan en el programa MATLAB), donde dadas las cuatro incógnitas: (bx, by), para el punto central B, y (ax, ay), para el punto circular A, se procede a establecer una condición de diseño; esto es, se comienza por considerar que los puntos centrales deben estar sobre un intervalo de valores para bx, lo que lleva a resolver un polinomio cúbico para los restantes tres valores de by. Dado que la solu-ción consiste en una curva cúbica (figura 3), el polinomio puede proporcionar una o tres raíces reales, como se aprecia en la figura. A continua-ción se obtienen los correspondientes valores de ax y ay. Al obtener las cuatro coordenadas de los extremos de las barras, es posible graficar las cur vas de Burmester (ver figura 1). El procedimien-to anterior se puede repetir pero ahora proporcio-nando el intervalo de valores para by, lo que lleva a determinar las coordenadas: bx, ax y ay. Es fre-cuente utilizar los dos cálculos con el fin de com-pletar las curvas en las zonas en que un solo barrido no genera datos suficientes (figura 3). Figura 3. Curvas de puntos centrales: (*) segmento con bx como dato; (o) segmento con by como dato. Como lo mencionan Gracia y Ángeles [5], la solu ción de polinomios resulta predispuesta a variabi lidad en las raíces, debido a que pequeñas modi-ficaciones en los datos producen cambios sensi-bles en las raíces. Por otro lado, las curvas de Burmester resultan con alta sensibilidad a la va-riación en los datos de los puntos de precisión: ubicación y orientación del CR (Sandor y Erd-man [6], Mahableshwarkar [7], Kalnas [8]). Dado el problema, cuando se dispone de las cur-vas solución, es posible que éstas no concuerden con la zona que el diseñador desea como zona de bastidor, o como zona del acoplador. Ante ello, es factible proponer una solución alterna a partir de una modificación de las curvas de Burmester mediante la alteración de los ángulos proporcio-nados para las fases de precisión (ver figura 4). Esto es, la solución al problema de conducción es sensible a la propuesta del ángulo dado para las fases de precisión.
Figura 4. Configuración de un cuerpo por cuatro fases.
DESARROLLO Sea el problema la conducción del cuerpo rígido (figura 4) por las posiciones indicadas por las co-ordenadas (x, y) y por la orientación del CR en las cuatro fases (cuadro 1). Considérese que el di señador tiene restringidas las fases inicial y final, fases extremas, tanto en posición como en orien-tación, pero puede modificar la orientación del CR en las fases intermedias. Esto modifica sensi-blemente la curva solución permitiendo así nue-vas posibilidades al diseñador. A continuación se ilustra el planteamiento mediante la representa-ción de soluciones derivadas de cambios en el án gulo de fase. Cuadro 1. Configuración para la conducción del CR por cuatro fases.
Posición de CR Fase x y ángulo 1 0 0 0o 2 2 2 θ2
3 4 4 θ3
4 6 6 90o De acuerdo con lo anterior, los ángulos θ2 y θ3, serán parámetros que determinarán soluciones particulares para cada configuración. A continuación se describe la primera configura-ción y la curva de puntos centrales resultante (fi-gura 5).
€
D1
=
0 0 0º2 2 10º4 4 80º6 6 90º
⎛
⎝
⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟
Al modificar los valores de θ2 y θ3, conforme a los datos del cuadro 2, se obtienen curvas seme-jantes a la mostrada en la figura 5. Cabe aclarar
ISBN 978-607-95309-9-0 Página | 431 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
que los ángulos varían simétricamente respecto a un eje a 45o, que es la línea sobre la que se mue-ve el CR.
Figura 5. Curva de puntos centrales para θ2 = 10o y θ3 = 80o.
Cuadro 2. Valores propuestos para θ2 y θ3.
Ángulos de fase Fase 1 2 3 4 5 6
2 10o 20o 30o 40o 25o 35o 3 80o 70o 60o 50o 65o 55o
En la siguiente figura se muestra el resultado de las curvas para puntos centrales de las cuatro pri-meras configuraciones. Como se aprecia, las cur-vas son semejantes, y la configuración con valo-res de 30o y 60o resulta en la curva de mayor di-mensión, mientras que de la configuración de 40o y 50o resulta la curva de menor tamaño.
Figura 6. Gráficas para las cuatro primeras configura-
ciones del cuadro 2. Ahora bien, dado que la configuración con 30o y 60o, resulta en la curva de mayor dimensión, se revisa el resultado de la misma con las configura-ciones dadas en las últimas dos columnas del cua dro 2. Ver figura 7. Como se observa, las curvas resultan más pequeñas y diferentes, siendo la con figuración de 25o y 65o la menor. Por otro lado, si se considera una distribución de ángulos asimétrica respecto al eje a 45o ( cuadro
3), los resultados son los siguientes. Cuadro 3. Valores para θ2 y θ3 en arreglo asimétrico.
Ángulos de fase Fase a b c d
2 10o 20o 40o 50o 3 40o 50o 70o 80o
Figura 7. Gráfica para las configuraciones: {(25o,65o), (30o,60o), (35o,55o)}.
A continuación se describe la primera configura-ción y la curva para los puntos centrales resultan-te en la figura 8.
€
Da
=
0 0 0º2 2 10º4 4 40º6 6 90º
⎛
⎝
⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟
Figura 8. Curva de puntos centrales para
θ2 = 10o y θ3 = 40o. En la figura 9 se muestra el resultado de las cur-vas de puntos centrales de las configuraciones del cuadro 3. Como se aprecia, las curvas son se-mejantes pero algunas resultan imágenes respec-to al eje a 135o. Esto es, las curvas, en forma de omega, para valores tendientes a 0o, resultan en omegas por arriba del eje; mientras que para va-lores más próximos a 90o, resultan en omegas por abajo del eje. En todo caso, las curvas mues-tran un arreglo respecto al eje a 135o.
ISBN 978-607-95309-9-0 Página | 432 Derechos Reservados © 2013, SOMIM
MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Figura 9. Gráfica para las configuraciones: {(10o,40o), (20o,50o), (40o,70o), (50o,80o)}.
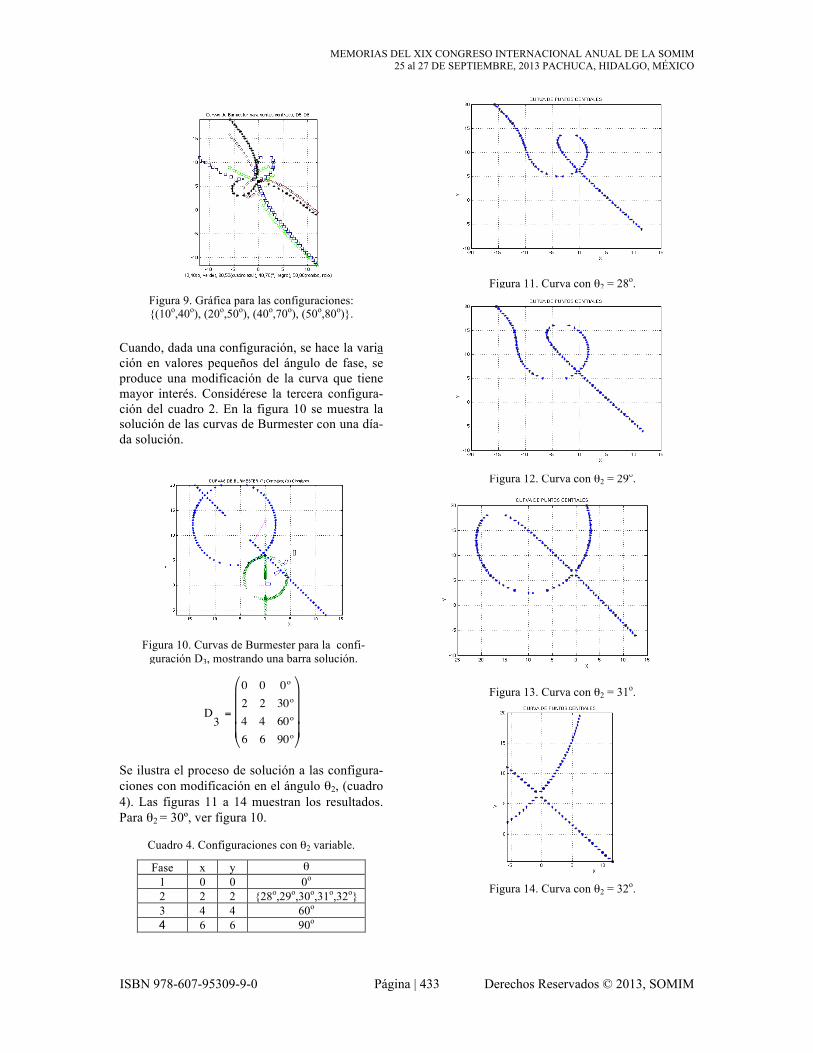
Cuando, dada una configuración, se hace la varia ción en valores pequeños del ángulo de fase, se produce una modificación de la curva que tiene mayor interés. Considérese la tercera configura-ción del cuadro 2. En la figura 10 se muestra la solución de las curvas de Burmester con una día-da solución.
€
D3
=
0 0 0º2 2 30º4 4 60º6 6 90º
⎛
⎝
⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟
Se ilustra el proceso de solución a las configura-ciones con modificación en el ángulo θ2, (cuadro 4). Las figuras 11 a 14 muestran los resultados. Para θ2 = 30º, ver figura 10.
Cuadro 4. Configuraciones con θ2 variable.
Fase x y θ 1 0 0 0o 2 2 2 {28o,29o,30o,31o,32o}
3 4 4 60o 4 6 6 90o
Figura 11. Curva con θ2 = 28o.
Figura 12. Curva con θ2 = 29o.
Figura 13. Curva con θ2 = 31o.
Figura 14. Curva con θ2 = 32o.
Figura 10. Curvas de Burmester para la confi-
guración D3, mostrando una barra solución.
ISBN 978-607-95309-9-0 Página | 433 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Como se observa, para la configuración de θ2 a 30º, si se disminuye el ángulo de fase en 1o o 2o, la curva solución se contrae. En cambio, si se in-crementa el ángulo de fase en 1o o 2o, la curva so lución se expande. Lo anterior se puede utilizar como una alternativa en la búsqueda cuando los valores propuestos inicialmente no son conve-nientes. La figura15 muestra las soluciones para los valores de θ2.
Figura 15. Curvas resultantes de θ2 = {28o,29o,30o,31o,32o}.
Cuando se trabaja con el ángulo para la fase 3 (cuadro 5), se modificará el ángulo conforme a los datos para θ3. Los resultados se muestran en las figuras 16 a 19. Para θ3 = 60º, ver figura 10.
Cuadro 5. Configuraciones con θ3 variable.
Fase x y θ 1 0 0 0o 2 2 2 30o 3 4 4 {58o,59o,60o,61o,62o} 4 6 6 90o
Figura 16. Curva con θ3 = 58o.
Figura 17. Curva con θ3 = 59o.
Figura 18. Curva con θ3 = 61o.
Figura 19. Curva con θ3 = 62o. En la figura 20 se da la comparación de resul-tados para θ3 variable. La comparación de las figuras 15 y 20 muestra, que en este caso, con los ángulos θ2 y θ3 distri-buidos regularmente en el intervalo, las curvas solución son similares, pero las curvas obtenidas a los ángulos extremos resultan simétricas; esto es, las curvas a 28o y 62o resultan en una imagen, así como las curvas a 29o y 61o, 31o y 59o, y 32o y 58o; como se ilustra en las figuras 21 a 24.
ISBN 978-607-95309-9-0 Página | 434 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Figura 20. Curvas para θ3 = {58o,59o,60o,61o,62o}.
Figura 21. Curvas con θ2 = 28o y θ3 = 62o.
Figura 22. Curva con θ2 = 29o y θ3 = 61o.
Figura 23. Curva con θ2 = 31o y θ3 = 59o.
Figura 24. Curva con θ2 = 32o y θ3 = 58o. Estos resultados, que se explican por la configu-ración simétrica de los ángulos de las fases, y por la forma de las funciones del apéndice compues-tas de funciones seno y coseno de los ángulos de fase, ofrecen posibilidades de interés para la bús-queda de soluciones más acordes a la disposi-ción, ya sea del bastidor o, en caso de trabajar con las curvas de puntos circulares, de la región para el acoplador. Cuando se trabaja una solución combinando con-juntamente alteraciones en los ángulos θ2 y θ3, las curvas resultan con formas más amplias, co-mo se ilustra en las siguientes configuraciones.
Cuadro 6. Configuraciones combinando θ2 y θ3.
θ2 θ 3 Figuras 28o 25 a 28 29o 29 a 32 31o 33 a 36 32o
{58o,59o,61o,62o}
37 a 40
Figura 25. Curva con θ2 = 28o y θ3 = 58o.
ISBN 978-607-95309-9-0 Página | 435 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Figura 27. Curva con θ2 = 28o y θ3 = 61o.
Figura 28. Curva con θ2 = 28o y θ3 = 62o.
Figura 29. Curva con θ2 = 29o y θ3 = 58o.
Figura 31. Curva con θ2 = 29o y θ3 = 61o.
Figura 32. Curva con θ2 = 29o y θ3 = 62o.
Figura 33. Curva con θ2 = 31o y θ3 = 58o.
Figura 26. Curva con θ2 = 28o y θ3 = 59o.
Figura 30. Curva con θ2 = 29o y θ3 = 59o.
ISBN 978-607-95309-9-0 Página | 436 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Figura 35. Curva con θ2 = 31o y θ3 = 61º.
Figura 37. Curva con θ2 = 32o y θ3 = 58o.
La modificación de las curvas resulta evidente, pero se muestra a continuación el conjunto de cur vas resultante para θ2 = 28o y θ3 = {58o, 59o, 60o, 61o, 62o}, como ejemplo de las posibilidades que ofrece la combinación de variaciones tanto en θ2 como en θ3.
Figura 34. Curva con θ2 = 31o y θ3 = 59o.
Figura 38. Curva con θ2 = 32o y θ3 = 59o.
Figura 39. Curva con θ2 = 32o y θ3 = 61o.
Figura 36. Curva con θ2 = 31o y θ3 = 62o.
Figura 40. Curva con θ2 = 32o y θ3 = 62o.
ISBN 978-607-95309-9-0 Página | 437 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Figura 41. Soluciones para θ2 = 28o y
θ3 = {58o, 59o, 60, 61o, 62o}.
CONCLUSIONES Como se ha expuesto, la forma y amplitud de la curva de Burmester es dependiente de las varia-ciones en el ángulo dado en la fase de precisión. La combinación de modificaciones para la fase 2 y 3 resulta en cambios más notables de la curva. Por ello, cuando el diseñador requiere de un ajus-te en la solución determinada por las curvas, es posible que resuelva la situación de manera más adecuada modificando ligeramente los ángulos de las dos fases intermedias. Resulta de interés cómo las curvas resultan simi-lares a valores decrecientes para la fase 2 con va-lores crecientes en la fase 3 y viceversa. Esto pue de ser considerado como un criterio para propo-ner valores de búsqueda. Esto es, resulta equiva-lente, como se ve en este caso, buscar una modi-ficación a la solución inicial ya sea disminuyen-do el ángulo en la fase 2, o incrementando el án-gulo en la fase 3. Lo expuesto es aplicable para las curvas de pun-tos circulares, dado que las coordenadas son de-pendientes de las resultantes para los puntos cen-trales. Se resalta el interés de las posibilidades que ofre-ce este planteamiento para el aprendizaje de sín-tesis de mecanismos, ya que el alumno puede rea lizar su proceso de diseño de una manera interac-tiva y probar diversas soluciones para compren-der el proceso de diseño cinemático. REFERENCIAS 1. HARTENBERG, R S; Denavit, J. (1964). Ki-nematic synthesis of linkages. McGraw-Hill. EUA.
2. HUNT, K H. (1978). Kinematic geometry of mechanisms. Clarendon Press Oxford. G B. 3. ROJAS Salgado, A A. (1988). "Síntesis exacta de conducción de cuerpo rígido mediante polino-mios". Memoria del XIV Congreso de la Acade-mia Nacional de Ingeniería, A C. Guanajuato, Gto. Septiembre de 1988. Pág 44 a 48. 4. ROJAS Salgado, A A; Torres Navarro, J I. (1993). “Síntesis de conducción de cuerpo rígido con restricciones de espacio en los puntos cen-trales. I Congreso Iberoamericano de Ingeniería Mecánica. Madrid. 5. GRACIA, L; Angeles, J., 2011, “Robustness to algorithmic singularities and sensitivity in computational kinematics” Proc. IMechE, Part C, J. Mechanical Engineering Science, Vol. 225, No. 4, pp. 987-999. 6. SANDOR, G N y Erdman, A G. (1984). Ad-vanced mechanism design: analysis and synthe-sis. Vol 2. Prentice-Hall, Inc. E U A. 7. MAHABLESHWARKAR, S V; Kramer, S N. (1990). "Sensitivity analysis of the Burmester equations of planar motion". Journal of Mecha-nical Design. Vol 112, Núm 3, septiembre de 1990. Pág 299 a 306. 8. KALNAS, R S; Kota, S. Incorporating uncer-tainty into mechanism synthesis. Mechanism and Machine Theory. 36 (2001) 843-51. APÉNDICE Datos: Coordenadas de los puntos de precisión: (xi, yi) Orientación de CR: θi para i = 0, , 3 Desplazamiento angular relativo del CR: βj = θj - θo para j = 1, , 3 Incógnitas: Se buscan las coordenadas: A(ax,ay), B(bx,by).
ISBN 978-607-95309-9-0 Página | 438 Derechos Reservados © 2013, SOMIM

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MÉXICO
Procedimiento - parte 1: Se definen valores para bx, como parámetro y se determinan las raíces reales de by (1 ó 3). Se resuelve el siguiente polinomio para by.
€
α3by3
+ α2by2
+ α1by + α0 = 0
donde :
α3 = det(M 33 )
α2 = −(det(C) + g1 + h2 )
€
α1 = 1 + det(M 22 ) + det(M11)
α0 = −k3
C = g,h, k[ ]T
Mij = menor ij de la matriz C
vi = elemento i del vector v para i = 1,, 3
Matriz C:
g = - A-1 p
h = - A-1 q
k= - A-1 r
Vectores p, q, r:
€
p j = −senβ j para j = 1,, 3
q j = 1 − cos β j
rj =
xo2 + yo
2 + x j2 + y j
2
2+ [(x j − bx )yo − xoy j ]senβ j +
− [(x j − bx )xo − yoy j ] cos β j − bx x j
Matriz A:
€
a j1 = bx − xo + (x j − bx ) cos β j + y jsenβ j
a j2 = −yo + (bx − x j )senβ j + y j cos β j
a j3 = xosenβ j + yo cos β j − y j ; para j = 1,, 3
Los valores de ax y ay, resultan:
€
ax =h1by − k3h1 + k1h3(g3h1 − g1h3 )by + h3
ay =g2by − g2k3 + g3k2(h3g2 − h2g3 )by + g3
Procedimiento - parte 2: Se definen valores para by, como parámetro y se establecen las raíces reales de bx (1 ó 3). Se resuelve el siguiente polinomio para bx.
€
α3bx3
+ α2bx2
+ α1bx + α0 = 0
donde :
α3 = det(M 33 )
α2 = −(det(C) + g2 + h1)
α1 = −(1 + det(M12 ) + det(M 21))
α0 = k3
€
C = g,h, k[ ]T
Mij = menor ij de la matriz C
vi = elemento i del vector v para i = 1,, 3
La matriz C se define igual que para bx. Vectores p, q, r:
€
p j = senβ j para j = 1,, 3
q j = 1 − cos β j
rj =
xo2 + yo
2 + x j2 + y j
2
2+ [ yox j − xo (y j − by
)]senβ j +
− [ xox j + yo (y j − by)] cos β j − byy j
Matriz A:
€
a j1 = x j cosβ j + (y j − by )senβ j − xoa j2 = −x jsenβ j + (y j − by ) cosβ j − yo + by
a j3 = −x j + xo cos β j − yosenβ j ; para j = 1,, 3
Los valores de ax y ay resultan:
€
ax =g1bx + g3k1 − g1k3(g1h3 − g3h1)bx + g3
ay =h2bx + h3k2 − h2k3(h2g3 − h3g2 )bx + h3
ISBN 978-607-95309-9-0 Página | 439 Derechos Reservados © 2013, SOMIM


















![“Diseño y construcción de un dodecápodo articulado ...somim.org.mx/memorias/memorias2013/pdfs/A1/A1_39.pdf · zado al mecanismo completo [4], este programa nos permitirá obtener](https://static.fdocuments.ec/doc/165x107/5e231a6636a71f44aa16bb21/aoediseo-y-construccin-de-un-dodecpodo-articulado-somimorgmxmemoriasmemorias2013pdfsa1a139pdf.jpg)