
Robótica Industrial
29
Grupo 1 y 2 ROBÓTICA INDUSTRIAL
-
Upload
franklin-rodriguez -
Category
Documents
-
view
8 -
download
2
description
historia
Transcript of Robótica Industrial
Grupo 1 y 2
ROBÓTICA INDUSTRIAL
ORIGEN DEL TERMINO ROBÓTICA
• 1920: se utiliza por primera vez el termino robot en una obra llamada “Los robots universales de Rossum” del dramaturgo Karel Capek.
• Robota ( palabra checa)= servidumbre o trabajo forzado. Despues el termino se tradujo al ingles como Robot.
Luego, Isaac Asimov comenzó en 1939 a contribuir con varias relaciones referidas a robots y a él se le atribuye el acuñamiento del término Robótica surgen las denominadas "Tres Leyes de Robótica" que son las siguientes:
1. Un robot no puede actuar contra un ser humano o, mediante la inacción, que un ser humano sufra daños.2. Un robot debe de obedecer las órdenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.3. Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las dos primeras leyes.

CLASIFICACIÓN GENERAL
Robots Play-Back• Regeneran una secuencia de
instrucciones grabadas.
Robots controlados por sensores• Toman decisiones basados en
datos obtenidos por sensores.
Robots controlados por visión• Manipulan un objeto al utilizar
información desde un sistema de visión
CLASIFICACIÓN GENERAL
Robots androides• Se parecen y actúan como si fueran
seres humanos. No existen en la realidad, sino que son elementos ficcionales.
Robots Adaptables• Los robots pueden automáticamente
reprogramar sus acciones sobre la base de los datos obtenidos por los sensores.
Robots con inteligencia artificial• Utilizan técnicas de inteligencia
artificial para tomar decisiones y resolver problemas.
Zoomórficos• Constituyen una clase
caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos.
Híbridos• Se sitúa en combinación con
alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición.
Teleoperadores• Estos robots son controlados de
manera remota por un operador humano. A estos robots se los utiliza en situaciones extremas.
SEGÚN SU ARQUITECTURA
Poliarticulados• En este grupo se encuentran
los robots sedentarios aunque pueden ser guiados para efectuar desplazamientos limitados y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo.
Robots móviles Son Robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante.
SEGÚN SU ARQUITECTURA
Exoesqueletos Robóticos• es una máquina móvil consistente
primariamente en un armazón externo que lleva puesto una persona y un sistema de potencia de motores o hidráulicos que proporciona al menos parte de la energía para el movimiento de los miembros.
Robots Industriales• los robots de este tipo pueden ser
electrónicos o mecánicos y se los utiliza para la realización de los procesos de manipulación o fabricación automáticos.
SEGÚN SU APLICACIÓN
Robots Médicos• Prótesis para disminuidos físicos• Destinados a la realización de
intervenciones quirúrgicas.
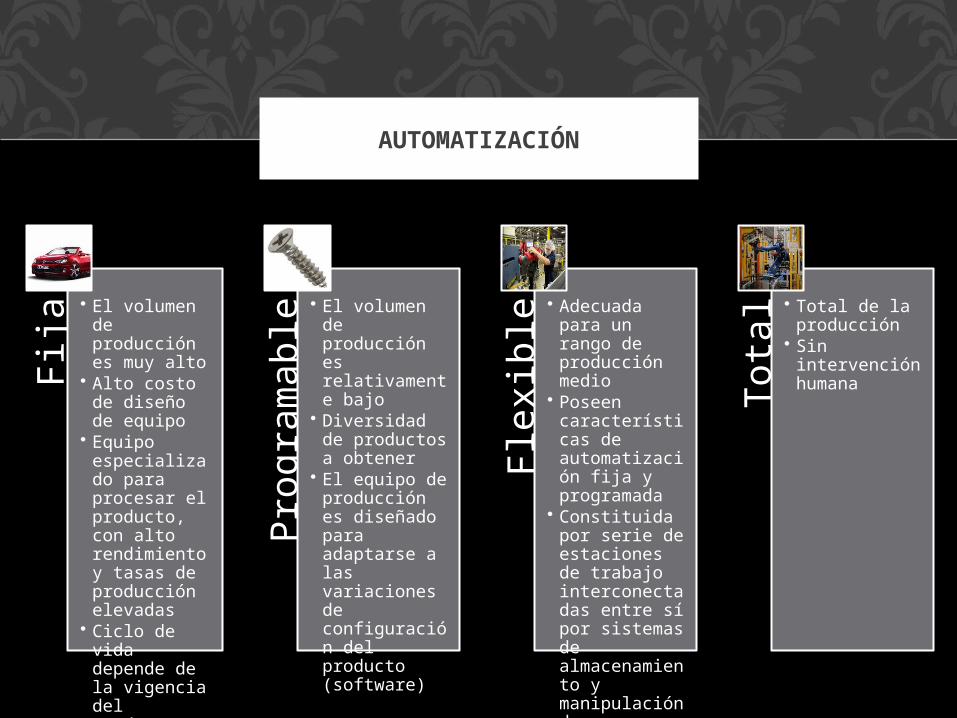
AUTOMATIZACIÓN
Fija • El volumen
de producción es muy alto
• Alto costo de diseño de equipo
• Equipo especializado para procesar el producto, con alto rendimiento y tasas de producción elevadas
• Ciclo de vida depende de la vigencia del producto.
Pro
gra
mab
le • El volumen de producción es relativamente bajo
• Diversidad de productos a obtener
• El equipo de producción es diseñado para adaptarse a las variaciones de configuración del producto (software)
Fle
xib
le • Adecuada para un rango de producción medio
• Poseen características de automatización fija y programada
• Constituida por serie de estaciones de trabajo interconectadas entre sí por sistemas de almacenamiento y manipulación de materiales
Tota
l • Total de la producción
• Sin intervención humana
ROBOT
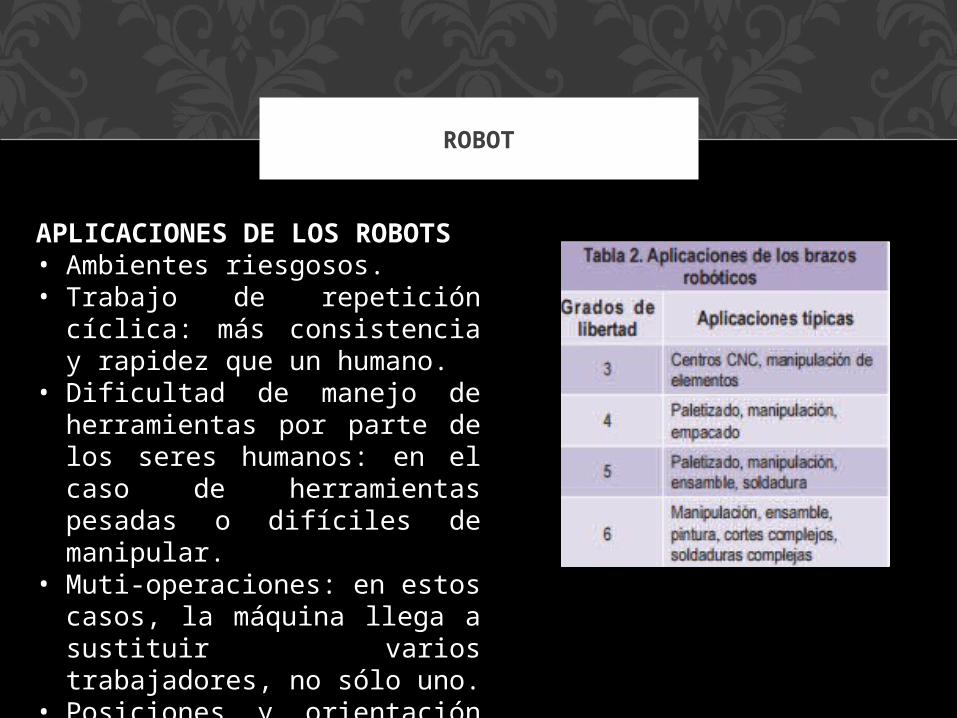
APLICACIONES DE LOS ROBOTS• Ambientes riesgosos. • Trabajo de repetición cíclica:
más consistencia y rapidez que un humano.
• Dificultad de manejo de herramientas por parte de los seres humanos: en el caso de herramientas pesadas o difíciles de manipular.
• Muti-operaciones: en estos casos, la máquina llega a sustituir varios trabajadores, no sólo uno.
• Posiciones y orientación establecidas: Tiene mayor grado de exactitud.
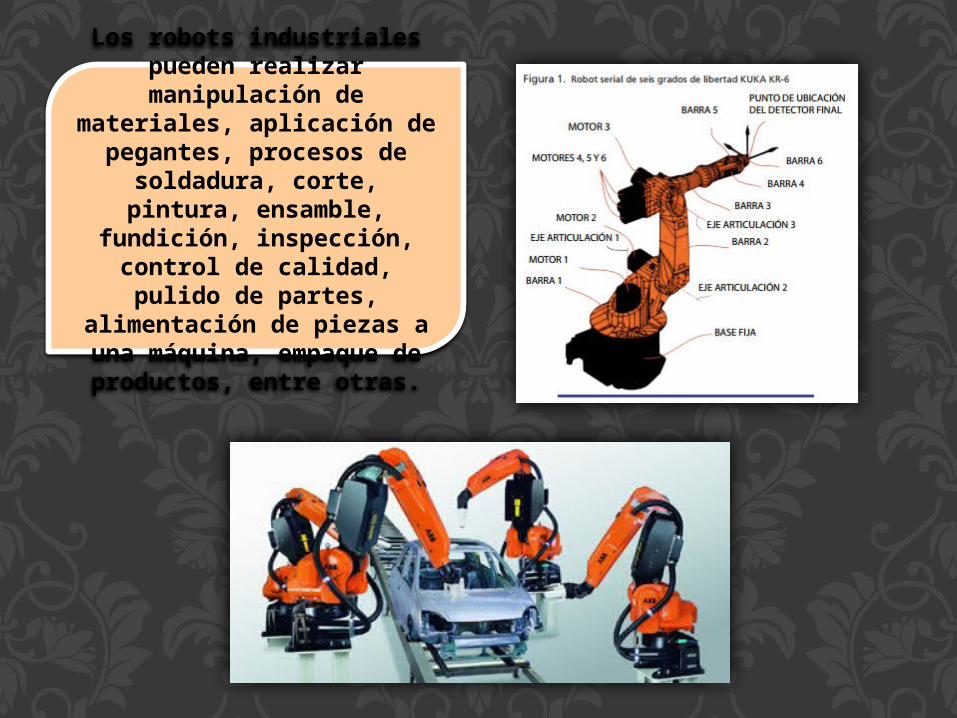
Los robots industriales pueden realizar manipulación de
materiales, aplicación de pegantes, procesos de
soldadura, corte, pintura, ensamble, fundición, inspección, control de
calidad, pulido de partes, alimentación de piezas a
una máquina, empaque de productos, entre otras.
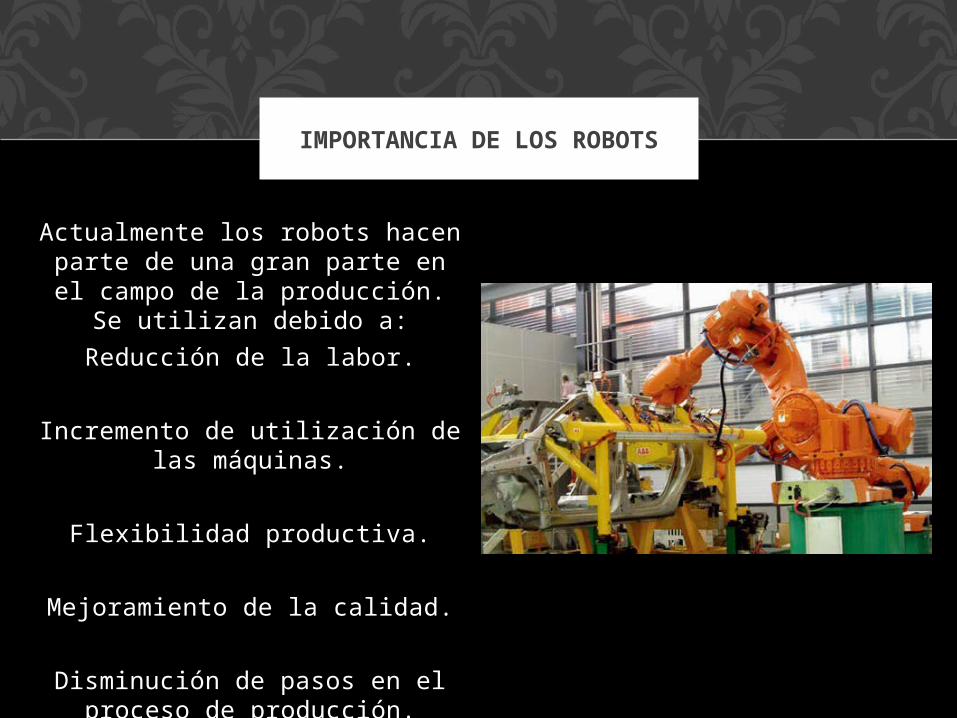
IMPORTANCIA DE LOS ROBOTS
Actualmente los robots hacen parte de una gran parte en el campo de la producción. Se
utilizan debido a:
Reducción de la labor.
Incremento de utilización de las máquinas.
Flexibilidad productiva.
Mejoramiento de la calidad.
Disminución de pasos en el proceso de producción.
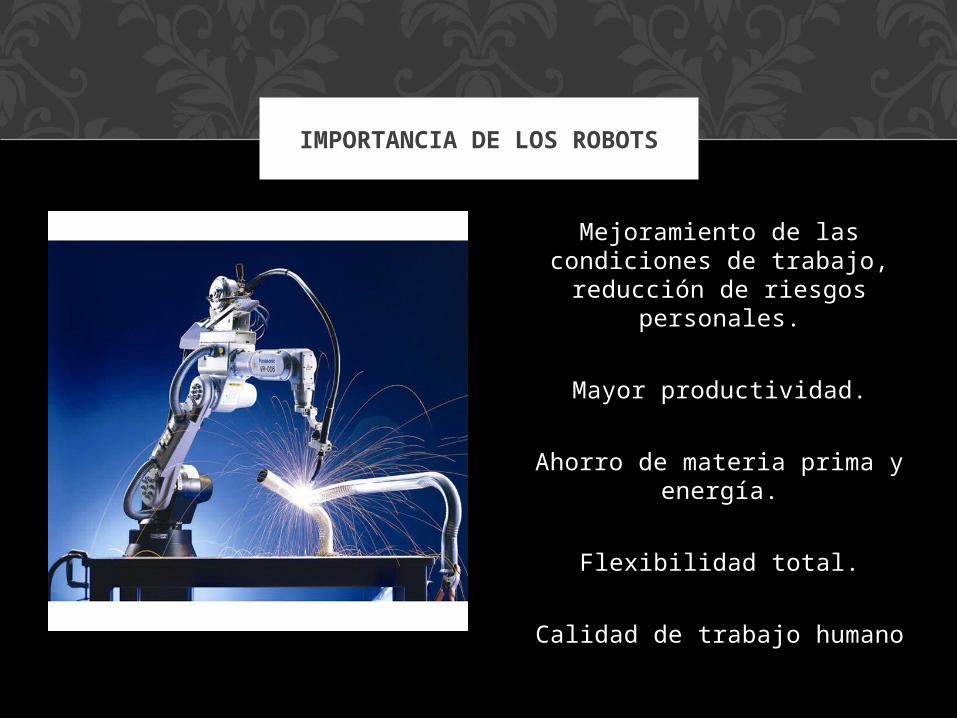
IMPORTANCIA DE LOS ROBOTS
Mejoramiento de las condiciones de trabajo,
reducción de riesgos personales.
Mayor productividad.
Ahorro de materia prima y energía.
Flexibilidad total.
Calidad de trabajo humano
HISTORIA DE LA ROBÓTICA
Los Árabes (siglo VII a XV) utilizaron estas
máquinas no solo como diversión, sino que les dieron una aplicación práctica, introduciéndolos en la vida cotidiana
dela realeza.
Hombre de Hierro de Alberto Magno (12041282).
La cabeza parlante de RogerBacon(1214-1294).
El gallo de Estrasburgo (1352).
HISTORIA DE LA ROBÓTICA
1495 Los diseños mecánicos de Leonardo DaVinci.(animales y soldados).
1738 Jacques de Vaucanson construye un autómata que podía interpretar canciones con una flauta.
1770 Pierre Jaquet-Droz construye muñecos que pueden escribir, dibujar e interpretar instrumentos musicales.
1940 IssacAsimov crea las leyes de la robótica.
1. Un robot no puede perjudicar aun ser humano.
2. Un robot ha de obedecer las ordenes recibidas de un ser humano.
3. Un robot debe proteger su propia existencia sin entrar en conflicto con la primera y segunda ley.
GENERACIONES
1. Robots manipuladores2. Robots con aprendizaje3. Robots con control sonorizado4. Robots inteligentes
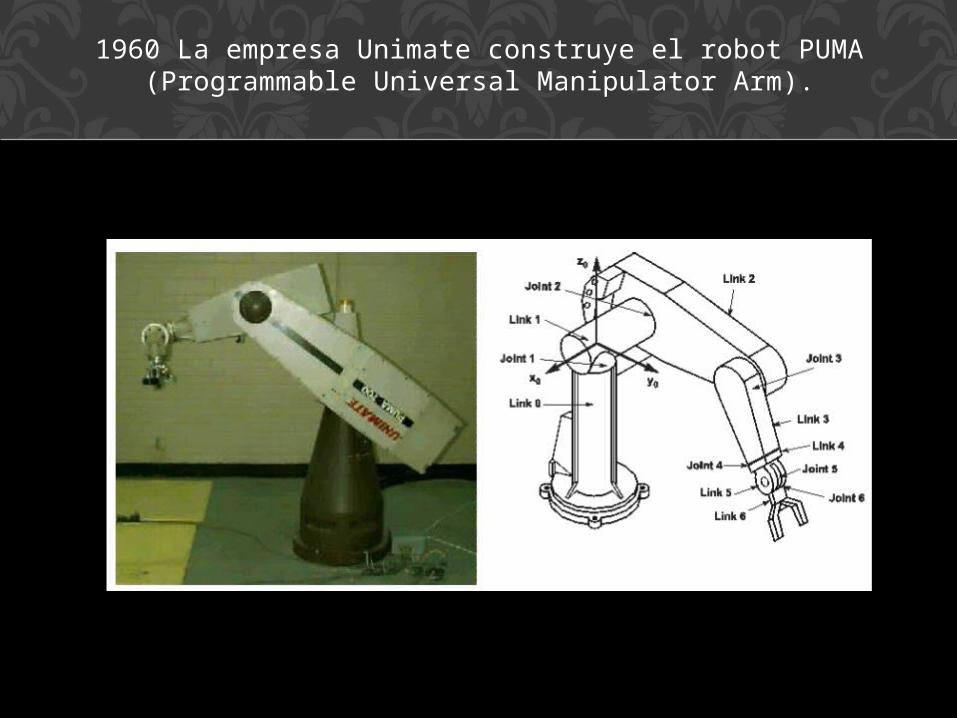
1960 La empresa Unimate construye el robot PUMA (Programmable Universal Manipulator Arm).
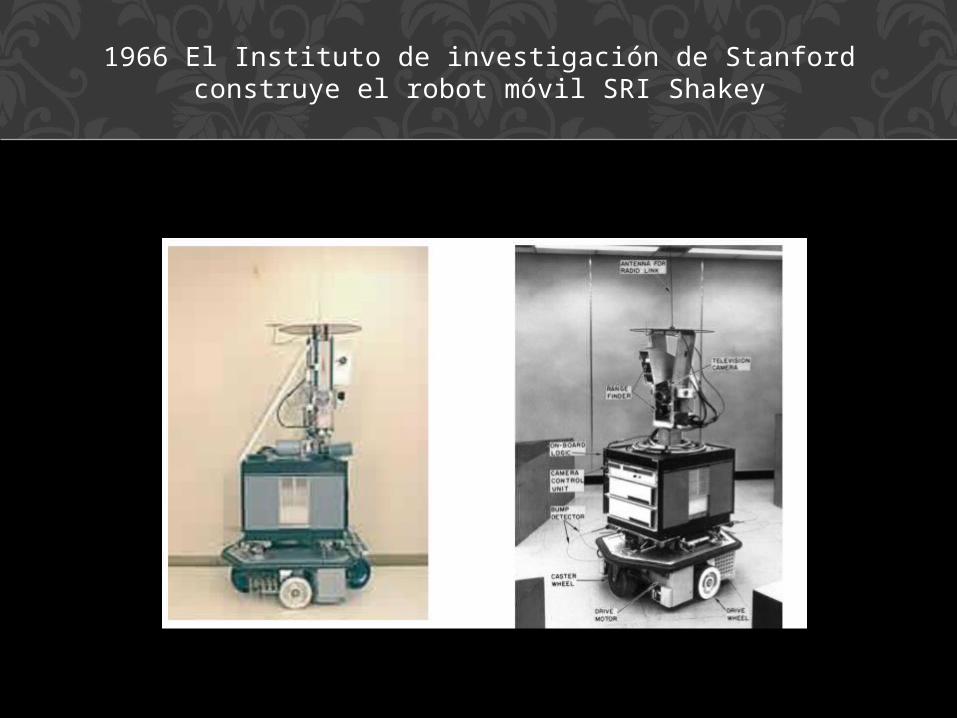
1966 El Instituto de investigación de Stanford construye el robot móvil SRI Shakey
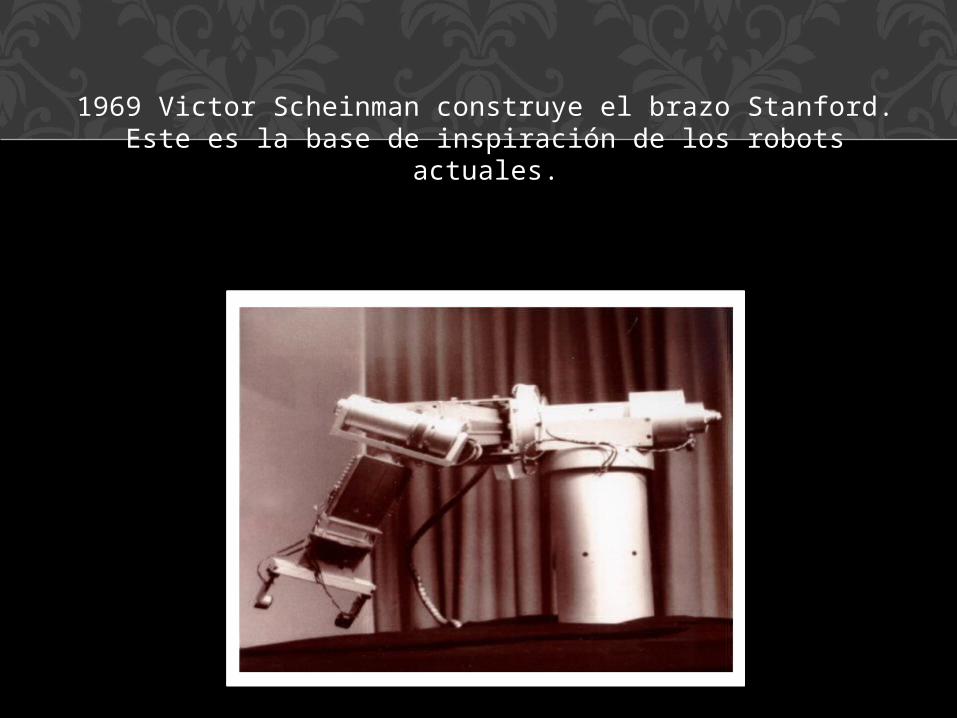
1969 Victor Scheinman construye el brazo Stanford. Este es la base de inspiración de los robots actuales.
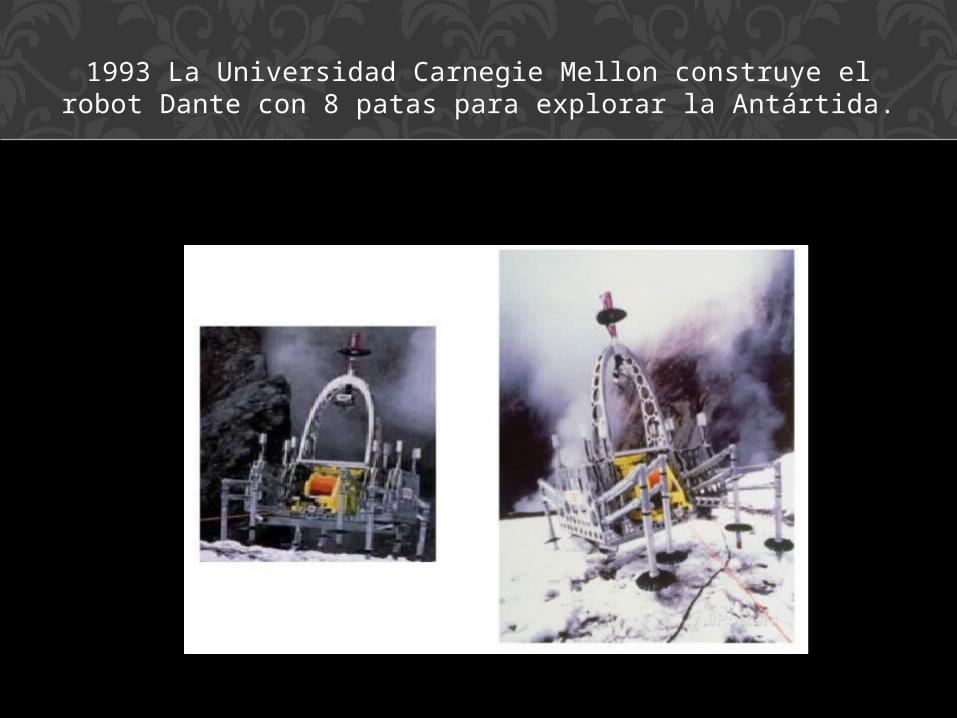
1993 La Universidad Carnegie Mellon construye el robot Dante con 8 patas para explorar la Antártida.

1996 La empresa Honda da a conocer el robot humanoidP3.

1997Se construye el robot móvil Pathfinder para la exploración de la superficie de Marte.
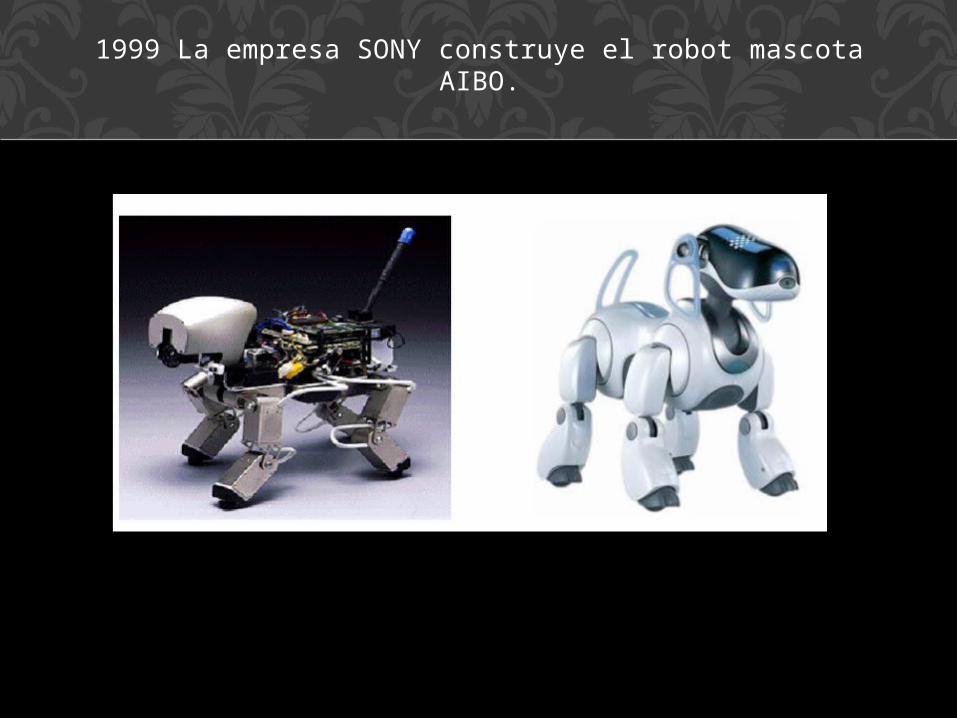
1999 La empresa SONY construye el robot mascota AIBO.
2000 La empresa Honda da a conocer el robot humanoide ASIMO.
BIBLIOGRAFÍA
1.Automatización en la manufactura. http://cursos.aiu.edu/Procesos%20y%20Tecnologia%20de%20Manufactura/PDF/Tema%205.pdf 2.Correa J, Vásquez R, Ramírez J, Taborda E. Manipuladores Robóticos, una mano para la industria. Metal Actual3. González J. Automatización de Procesos Industriales. Dto I.S.A, EUITI e ITT- UPV/EHU Vitoria-Gasteiz. Febrero 2004


















