RESPALDO MATEMÁTICO PRELIMINAR DE LA ......BOGOTÁ D.C. 2011 2 RESPALDO MATEMÁTICO PRELIMINAR DE...
94
1 RESPALDO MATEMÁTICO PRELIMINAR DE LA AERONAVE TURDUS FUSCATER I ANGEL GIOVANY MAYORGA GIL JACKSSON FERNANDO RIVAS ROMERO UNIVERSIDAD DE SAN BUENAVENTURA FACULTAD DE INGENIERÍA PROGRAMA DE INGENIERÍA AERONÁUTICA BOGOTÁ D.C. 2011
Transcript of RESPALDO MATEMÁTICO PRELIMINAR DE LA ......BOGOTÁ D.C. 2011 2 RESPALDO MATEMÁTICO PRELIMINAR DE...

1
RESPALDO MATEMÁTICO PRELIMINAR DE LA AERONAVE TURDUS FUSCATER I
ANGEL GIOVANY MAYORGA GIL
JACKSSON FERNANDO RIVAS ROMERO
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA AERONÁUTICA
BOGOTÁ D.C.
2011

2
RESPALDO MATEMÁTICO PRELIMINAR DE LA AERONAVE TURDUS FUSCATER I
ANGEL GIOVANY MAYORGA GIL
JACKSSON FERNANDO RIVAS ROMERO
Trabajo presentado como requisito para optar al título de
Ingeniero Aeronáutico
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA AERONÁUTICA
BOGOTA D.C.
2011

3
Nota de Aceptación:
______________________________
______________________________
______________________________
______________________________
______________________________
______________________________
______________________________
______________________________
Firma del Presidente del Jurado
______________________________
Firma del Jurado
______________________________
Firma del Jurado
Bogotá D.C., 28 de Noviembre de 2011

4
DEDICATORIA
Por dónde empezar, si es a toda mi familia a la que le debo agradecer, a mis
padres mis abuelas mis tíos a mi hermana y hermanos, a mi mama que con su
carriño su apoyo y con esa perseverancia que le coloca a la vida me enseño que
por mas difíciles que sean las cosas siempre tendré la capacidad de sacar
adelante todo lo que me proponga, a mi papa que con el ejemplo que me ha dado
me ha puesto unas metas muy grandes a seguir y a superar y lo más importante
es a creer en uno mismo, a mi abuelita que con esa tierna alcahuetería ha estado
siempre a mi lado dándome un apoyo incondicional, a mi tío Gustavo que siempre
ha confiado en mí que nunca ha perdido la fe en lo que soy y en lo que seré por
esto ha apostado en mi, a mi tío Hernando que me ha enseñado que la familia
siempre es primero y por esto siempre ha estado a mi lado siendo el gestor de mis
proyectos y de mis sueños.
Gracias muchas gracias por estar a mi lado.
Angel G. Mayorga
5
DEDICATORIA
A mi padre y mi mejor amigo quien me enseñó el inmenso valor y significado de la vida, a quien Dios eligió para ser mi ángel y mi ejemplo a seguir desde el cielo.
A mi madre quien me enseño que aunque nuestras manos duelan serán nuestra principal herramienta de trabajo, que aunque nuestro pelo sea blanco seremos el ejemplo, el orgullo y los héroes de nuestros hijos, que cada día hay un motivo para trabajar hasta el cansancio y que aunque hayan problemas siempre tendremos un abrazo y una cena caliente esperando nuestra llegada a casa; agradezco a Javier, al hombre que Dios y mi padre eligieron para acompañar a mi madre en la dura labor de construir un futuro para Cami, Sebas y yo.
A mis abuelos por su sabiduría, sus oraciones y divina compañía, a mis hermanos, tíos y primos quienes siempre me tendieron la mano y nunca me dejaron cambiar de rumbo, por sus consejos, por sus reclamos, por apoyarme en todo momento y por no
ponerle límites a la unión familiar.
A Pao, la mujer que me ha dado sus últimos 6 años, con quien he compartido mis triunfos y fracasos en la cercanía y en la distancia, a quien me ha dado el regalo más hermoso de la vida y la labor más exigente de todas, a la mujer que me permitió ser padre de mi hermoso Tomas... y a él mismo por convertirse en mi mayor motivación para construir un futuro lleno de éxito y para transmitirle el valioso e incalculable
ejemplo que he recibido de mi familia.
y por último a quien me ha dado todo lo anterior, a Dios, que hasta hoy me ha permitido disfrutar del hermoso don de la vida, de mis talentos, de mis aciertos y fracasos y de todos y cada uno de los ángeles que puso en mi camino para recordarme que cada día hay una razón más para querer alcanzar la cima del mundo.
Jacksson Fernando Rivas Romero
6
TABLA DE CONTENIDO
INTRODUCCIÓN Pág. 11.
1. PLANTEAMIENTO DEL PROBLEMA Pág. 12.
1.1. ANTECEDENTES Pág. 12.
1.1.1 Antecedentes Internacionales Pág. 12.
1.1.2 Antecedentes Nacionales Pág. 13.
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA Pág. 14.
1.3 JUSTIFICACIÓN Pág. 14.
1.4. OBJETIVOS DE LA INVESTIGACIÓN Pág.15.
1.4.1 Objetivo General Pág.15.
1.4.2 Objetivos Específicos Pág.15.
1.5 ALCANCES Y LIMITACIONES DEL PROYECTO Pág.15.
1.5.1 Alcance Pág.15.
1.5.2 Limitaciones Pág.16.
2. MARCO DE REFERENCIA Pág.18
2.1. MARCO TEÓRICO / CONCEPTUAL Pág.18
2.1.1. Aeronave Experimental Pág.18
2.1.2. Aeronave de Categoría Experimental Pág.18
2.1.3. Aeronave Construida por Aficionados Pág.18
2.1.4. Aeronave LSA Pág.19
2.1.5. Cálculos Aerodinámicos Pág.19
2.1.6. Cálculos Estructurales Pág. 25
2.1.7. Cálculos de Estabilidad y Control Pág. 28
7
2.2. MARCO LEGAL Pág. 33
2.2.1. Normatividad aplicable para aeronaves de categoría experimental Pág. 33
2.2.2. Normatividad aplicable a aeronaves de categoría LSA Pág. 34
3. METODOLOGÍA Pág. 35
3.1. ENFOQUE Pág. 35
3.2. LINEA DE INVESTIGACIÓN DE LA UNIVERSIDAD DE SAN BUENAVENTURA
SUB-LÍNEA DE FACULTAD / CAMPO TEMÁTICO DEL PROGRAMA Pág. 35
3.3. TECNICAS DE RECOLECCIÓN DE LA INFORMACIÓN Pág. 35
3.4. CUMPLIMIENTO DE OBJETIVOS-HERRAMIENTA Pág. 37
3.5. HIPOTESIS Pág. 37
3.6. VARIABLES Pág. 37
3.6.1. Variables Independientes Pág. 37
3.6.2. Variables Dependientes Pág. 38
4. DESARROLLO INGENIERIL Pág. 39
4.1. CALCULO DEL PESO Y BALANCE DE LA AERONAVE TURDUS
FUSCATER I Pág. 39
4.1.1. Elaboración del modelo en CAD Pág. 39
4.1.2 Peso y Balance Turdus Fuscater I Pág. 41
4.1.3. Conclusiones ―Calculo del peso y balance de la aeronave
Turdus Fuscater I‖ Pág. 44
4.1.4. Correcciones al peso y balance y modelamiento de la aeronave
Turdus Fuscater I Pág. 45
4.2. CALCULO DE CARACTERISTICAS AERODINAMICAS DE
LA AERONAVE TURDUS FUSCATER I Pág. 47
4.2.1. Información de Referencia Aerodinámica para el Análisis de
Velocidades Pág. 47
4.2.2. Cálculos Rendimiento Pág. 47
8
4.3. CALCULO DE CARACTERISTICAS DE ESTABILIDAD & CONTROL
DE LA AERONAVE Pág. 62
4.3.1. Fuerzas en equilibrio de la aeronave Pág. 62
4.3.2. Estabilidad Longitudinal Pág. 65
4.4. CALCULO DE CARACTERISTICAS ESTRUCTURALES
DE LA AERONAVE TURDUS FUSCATER I Pág. 67
4.4.1. Determinación de Cargas sobre la superficie del ala Pág. 67
4.4.2. Análisis estructural del Ala. Pág. 69
4.4.3. Análisis Estructural de la estructura trasera de la aeronave. Pág. 74
5. PRESENTACIÓN Y ANALISIS DE RESULTADOS. Pág. 78
6. CONCLUSIONES Pág. 83
7. RECOMENDACIONES Pág. 85
7.1 RECOMENDACIONES PARA DESARROLLO POSTERIOR
DE LA AERONAVE Pág. 85
7.2 OTRAS RECOMENDACIONES DERIVADAS DE
LA INVESTIGACIÓN Pág. 85
BIBLIOGRAFIA Pág. 86
ANEXOS Pág. 87
9
Abreviaturas.
Las abreviaturas usadas en este documento corresponden a las mismas utilizadas en la norma ASTM F 2245-07.
AR—aspect ratio = b2S
b—wing span, (m)
c—chord, (m)
CAS—calibrated air speed, (m/s, kts)
CL—lift coefficient of the airplane
CD—drag coefficient of the airplane
CG—center of gravity
Cm—moment coefficient (Cm is with respect to c/4
point, positive nose up)
CMO—zero lift moment coefficient
Cn—normal coefficient
g—acceleration as a result of gravity = 9.81 m/s2
IAS—indicated air speed (m/s, kts)
ICAO—International Civil Aviation Organization
LSA—light sport aircraft
MAC—mean aerodynamic chord (m)
n—load factor
n1—airplane positive maneuvering limit load factor
n2—airplane negative maneuvering limit load factor
n3—load factor on wheels
P—power, (kW)
r—air density (kg/m3) = 1.225 at sea level standard conditions
POH—Pilot Operating Handbook
10
q—dynamic pressure (N/m2) = 1 / 2rV2
RC—climb rate (m/s)
S—wing area (m2)
V—airspeed (m/s, kts)
VA—design maneuvering speed
VC—design cruising speed
VD—design diving speed
VDF—demonstrated flight diving speed (VDF # VD)
VF—design flap speed
VFE—maximum flap extended speed
VH—maximum speed in level flight with maximum
continuous power (corrected for sea level standard conditions)
VNE—never exceed speed (VH # VNE # 0.9VDF)
VS—stalling speed or minimum steady flight speed at
which the airplane is controllable (flaps retracted)
VS1—stalling speed or minimum steady flight speed
with the flaps in a specific configuration
VS0—stalling speed or minimum steady flight speed
at which the airplane is controllable in the landing configuration
(flaps fully deployed)
VSP—maximum spoiler/speed brake extended speed
VR—ground gust speed
VX—speed for best angle of climb
VY—speed for best rate of climb
W—maximum takeoff or maximum design weight (N)
WE—maximum empty airplane weight (N)
WU—minimum useful load (N)
w—average design surface load (N/m2)

11
INTRODUCCIÓN
Desde el primer vuelo controlado en un aparato más pesado que el aire, la aviación
experimental ha cumplido un papel fundamental en el desarrollo de la industria
aeronáutica ya que todos los diseños de aeronaves que han surcado los cielos iniciaron
en algún momento como un avión experimental.
Aunque hoy en día, las aeronaves experimentales llamadas también prototipos,
producidas por los grandes fabricantes tienen todo tipo de estudios de ingeniería y son
diseñadas de acuerdo a la normatividad vigente, existen también pequeñas aeronaves
diseñadas y construidas por aficionados de forma casi empírica, en una forma muy similar
en la cual fueron construidas las primeras aeronaves por los pioneros de la aviación.
A través de los años, los aficionados y constructores de aeronaves experimentales se han
visto en la obligación de determinar qué tipo de análisis, cálculos o pruebas realizar en
sus aeronaves para garantizar condiciones de vuelo seguras, generando accidentes en su
mayoría de casos fatales, cuando no se realizaba esta tarea correctamente, dada la
naturaleza en algunos casos empírica de su diseño. Dichos accidentes pusieron en
peligro el futuro de la aviación aficionada en algunos momentos, demostrando la
importancia de realizar adecuadamente la validación de un diseño de avión experimental1
construido por aficionados, teniendo en cuenta la limitada normatividad vigente para
aeronaves de esta categoría.
En el año 2003 se inicio un proyecto integrador con la idea de construir una estructura
para un aeronave con materiales nacionales de manera empírica, es decir sin realizar
ningún tipo de estudio estructural o aerodinámico. La aeronave construida fue bautizada
―Turdus Fuscater I” y su geometría básica se baso en la de diversas aeronaves
ultralivianas existentes en el mercado. Puesto que el trabajo continúa en el Turdus
Fuscater I, con el objetivo de ponerlo a punto para realizar vuelos en algún momento, esta
investigación pretende realizar un soporte matemático preliminar para determinar de
forma preliminar si la aeronave en cuestión es segura para vuelo.
1 Entiéndase por avión experimental una aeronave de categoría experimental bajo la definición otorgada por la
FAA.
12
1. PLANTEAMIENTO DEL PROBLEMA
1.1 ANTECEDENTES
1.1.1 Antecedentes Internacionales.
La aviación experimental tiene sus inicios desde el origen de la aviación misma debido a
que desde que las primeras aeronaves surcaron los cielos, los fabricantes se han
esforzado en realizar pruebas y análisis para considerarlas a estas aptas para vuelo, sin
existir normatividad alguna entonces. Con el correr de los años y la constitución de
entidades aeronáuticas en cada estado, se comenzó a regular la operación aérea con el
objetivo de establecer estándares de aeronavegabilidad. Un ejemplo puede verse en la
creación de la rama aeronáutica dentro del departamento de comercio de USA en el año
1926 y en la primera certificación de una aeronave otorgada al Buhl AirStar en 1927.
Sin embargo siempre se mantuvo la existencia de la aviación experimental y aficionada
gracias a diversos constructores que publicaron y vendieron los planos de sus aviones,
entre ellos Santos Dumont y su avión Demoiselle.
Imagen No. 1. Aeronave Demoiselle. Primer avión experimental ofrecido en
planos para el público general.
13
La aviación experimental continuó creciendo mundialmente, sin embargo durante las
“National Races” en Estados Unidos entre 1929 y 1933, y debido a la gran accidentalidad
que tuvieron las aeronaves experimentales obligo mediante la introducción de
normatividad (Federal Standards) a restringir enormemente este campo, el cual renacería
nuevamente en la década de los 50´s, y crecería constantemente durante la década de
los 80´s, en la cual la venta de aeronaves experimentales y construidas por aficionados
supero 5 veces a la venta de aeronaves certificadas.
No obstante la masificación de este tipo de aeronaves, los estándares y la normatividad
son muy limitados. Por ejemplo la FAA determina que para otorgar un certificado de
aeronavegabilidad de tipo experimental prototipo no solicita ningún tipo de cálculos de
ingeniería, limitándose al peso y balance de la aeronave. La FAA solo se limita dar una
serie de recomendaciones y regulaciones no obligatorias para cumplir con la certificación
de aeronavegabilidad para las aeronaves experimentales y construidas por aficionados,
las cuales pueden observarse en la AC No. 20-27G.
Posteriormente y en vista al número de diseños de aeronaves ligeras y homebuildt, y con
el objetivo de disminuir la accidentabilidad en las mismas, inicialmente la ASTM (American
Section of the International Association for Testing Materials) creó la normatividad ASTM
F2245, generando un estándar para el diseño de aeronaves ligeras, el cual fue
posteriormente adoptado por la FAA, JAR y otras entidades a nivel mundial como
requisito de cumplimiento para el diseño de aeronaves LSA (light sports aircraft como son
reconocidas mundialmente)
1.1.2. Antecedentes Nacionales
Si bien es cierto que hasta hace poco tiempo en Colombia no se fabricaban aeronaves
experimentales y todos los ―homebuilt2‖ eran importados y ensamblados en el país, con la
aparición de diversos fabricantes en el Valle del Cauca como Aeroandina y de otras
empresas como Glass Aircraft de Colombia y Aeronaves ltda (empresa ubicada en
Manizales) se ha tenido un gran avance en esta industria, lo cual ha derivado en la
construcción de aeronaves de categoría experimental y posteriormente aeronaves con
características LSA.
2 Aeronaves de categoría experimental donde el 51% del trabajo de total de construcción y ensamble lo realiza
el comprador.
14
En la actualidad se tiene referencia de algunas aeronaves certificadas bajo el estándar
ASTM 2245 por ingenieros Colombianos, tal es el caso del ―Storch‖ producido por Cricket
Aviation, y el ―Tayrona‖, el cual se encuentra en proceso de certificación FAA LSA.
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
Como se mencionó existe actualmente una política clara para considerar si el diseño tipo
de una aeronave es certificable y posteriormente considerado seguro para el vuelo,
siendo lo anterior valido si la aeronave se puede ubicar sobre una de las categorías
establecidas, por ejemplo: Aeronave FAR 23, Aeronave FAR 25, Aeronave LSA, etc.
Es importante recalcar que una aeronave sin certificar puede estar en una condición
segura de vuelo. En otras palabras la certificación de un diseño específico de aeronave no
es la única forma de comprobar que dicha aeronave es segura para volar.
Sin embargo, siendo la aeronave Turdus Fuscater I construida de manera empírica sin
tener en cuenta cálculos estructurales, aerodinámicos y/o referencias de su
comportamiento en vuelo, y con la existencia de una normatividad limitada a la hora de
clasificar y considerar segura para vuelo a una aeronave construida empíricamente, surge
la siguiente pregunta:
¿Será la aeronave Turdus Fuscater I segura para la condición de vuelo considerando la
condición empírica de su diseño y construcción?
1.3 JUSTIFICACIÓN
El desarrollo de este proyecto se justifica por los siguientes argumentos:
En garantizar la seguridad en vuelo de la aeronave Turdus Fuscater, que si bien
dependiendo de su categoría, legalmente podría no requerir de una certificación
como tal se conoce, si requiere de un soporte matemático preliminar para garantizar
que la aeronave sea segura, tanto para el piloto, como para las personas en tierra. En
otras palabras se reducirían riesgos de un accidente potencial.
En que el Turdus Fuscater es una aeronave que surgió de la visión de su diseñador,
el cual la creó de manera empírica en un momento que no se contaba con los
conocimientos para realizar cálculos matemáticos aerodinámicos, estructurales y de
15
estabilidad & control. Por esta razón un soporte matemático al diseño del Turdus
Fuscater como el propuesto en esta tesis resulta pertinente.
Como estudiantes de ingeniería aeronáutica los investigadores desean y resulta
plenamente justificable retroalimentar todo lo aprendido y aplicarlo a un proyecto real.
1.4 OBJETIVOS DE LA INVESTIGACIÓN
1.4.1 OBJETIVO GENERAL
Soportar matemáticamente las características principales de diseño de la aeronave
Turdus Fuscarter I para establecer de forma preliminar si es apta para vuelo seguro.
1.4.2 OBJETIVOS ESPECÍFICOS
Usando como referencia la norma ASTM F2245-07, realizar el peso & balance de la
aeronave apoyándose en un modelo CAD que será realizado del diseño físico existente.
Referenciándose en los numerales 5.2 y 4.4 de la norma ASTM F2245-07, realizar un
análisis aerodinámico de la aeronave.
Determinar teóricamente la estabilidad longitudinal y lateral direccional estática de la
aeronave.
Usando como referencia el numeral 5.2.1 hasta el 5.8 de la norma ASTM F2245-07,
realizar un análisis estructural de la aeronave, determinando el esfuerzo combinado, los
flujos de cortante en la estructura primaria.
Proponer modificaciones y realizar correcciones de manera preliminar al diseño de la
aeronave para hacerla más segura, cumpliendo teóricamente con los numerales de la
norma ASTM F2245-07 referenciados en los objetivos anteriores.
Concluir de manera preliminar si la aeronave Turdus Fuscater es segura para vuelo
desde el punto de vista aerodinámico, estructural y de estabilidad & control.
1.5 ALCANCE Y LIMITACIONES
1.5.1 ALCANCE
La propuesta de esta investigación va de la mano con los objetivos y están representados
en el cumplimiento de los mismos en relación a una normatividad existente. En este orden
16
de ideas, luego de realizar un soporte matemático preliminar y compararlo con los datos
de cumplimiento de la norma ASTM F2245-07, se concluirá sobre las características
aerodinámicas, estructurales y estabilidad & control de la aeronave Turdus Fuscater I y su
relación con la seguridad en vuelo. En caso que existan discrepancias entre los resultados
del análisis y las características actuales de la aeronave se propondrán cambios y
mejoras. No obstante, dado que el soporte matemático es preliminar, se tomarán
únicamente los parámetros más importantes y relevantes, tales como la estructura
primaria de la aeronave, mas no realizarán análisis avanzados tales como flutter, fatiga,
análisis detallados de los sistemas de control, o de combustible, los cuales se reservan
para análisis detallados posteriores y están fuera del alcance de esta investigación.
Debido a que el motor y los detalles de su instalación no hacen parte del diseño existente
de la aeronave, el análisis del conjunto motopropulsor será realizado solo desde el punto
de vista de cómo esta instalación afecte los objetivos de esta investigación. Es decir como
la ubicación del conjunto motopropulsor afecta el peso y balance, el desempeño
aerodinámico y performance, de estabilidad y control y por último la estructura primaria de
la aeronave. De la misma forma que en el caso anterior, un análisis detallado del sistema
moto propulsor, seguridad y resistencia al calor de las líneas, vibraciones y otros análisis
detallados se reservan para investigaciones posteriores.
Desde el punto de vista de estabilidad y control, el alcance de esta investigación será
hasta la estabilidad y control estático de la aeronave, sin llegar a analizarlos
dinámicamente. Dado que el diseño de la aeronave es empírico se espera que sea
necesario realizar diferentes modificaciones al diseño de la misma, en donde sería
necesario repetir los cálculos de estabilidad y control luego de cada modificación
realizada, lo cual queda fuera del alcance de esta investigación y obliga a realizar el
análisis de estabilidad y control inicialmente solo hasta el comportamiento estático.
Por último los análisis, aerodinámicos, de estabilidad & control y estructurales se
realizarán teóricamente sin generar nuevas construcciones, alteraciones o modificaciones
a la construcción original del aeronave Turdus Fuscater I.
1.5.2 LIMITACIONES
La investigación encuentra limitaciones para el cumplimiento de los objetivos de la
siguiente forma:
17
Cumplimiento de Objetivo Principal:
Limitación Práctica. El Turdus Fuscater no fue diseñado para cumplir con la norma ASTM
2245, razón por la cual se podría tener que modificar el diseño de la aeronave un número
indeterminado de veces o hasta cambiar radicalmente el mismo para cumplir con los
numerales de la norma ASTM F2245-07 referenciados, limitando el tiempo y otros
recursos requeridos para la finalización de la tesis.
Modelamiento de la aeronave:
Limitación Informativa - El diseño del Turdus Fuscater no fue completado por lo cual no se
conocen tipo de componentes y ubicación de los mismos. (Ejemplo Tanque de
combustible, cables actuadores de superficies, etc.), requeridos para cumplir con el
modelamiento de la aeronave & peso y balance.
Interpretación de la Norma:
Limitación Informativa y práctica - La norma ASTM F2245 presenta en muchos casos
dificultades de interpretación para los ingenieros que la utilizan, lo cual podría generar
discrepancias entre los resultados obtenidos del análisis y los resultados requeridos por la
misma.
18
2. MARCO DE REFERENCIA
2.1. MARCO TEORICO / CONCEPTUAL
2.1.1. Aeronave Experimental
Bajo la FAA, una aeronave experimental es una aeronave que no cumple con los
estándares y la normatividad aplicable a las aeronaves certificadas.
Aunque la palabra ―Aeronave Experimental‖ puede aplicarse a diversos tipos de
aeronaves militares, la definición aplicada a esta investigación se centrará en aeronaves
civiles de categoría experimental.
2.1.2. Aeronave de Categoría Experimental
Bajo la FAA, una aeronave de categoría experimental es una aeronave que no posee un
certificado tipo o no cumple con su certificado tipo. Si la aeronave se encuentra sin
embargo en un estado para realizar un vuelo seguro puede recibir un certificado de
aeronave experimental. 3
En los siguientes casos, la aeronave podrá recibir un certificado de aeronavegabilidad en
la categoría experimental:
Aeronaves de investigación y desarrollo
Para demostrar cumplimiento con las regulaciones
Para entrenamiento de tripulación
Para exhibición
Para carreras aéreas
Para análisis de mercado y demostración de venta
Para operar aeronaves construidas por aficionados, de kit o aeronaves LSA en la
categoría experimental.
2.1.3. Aeronave Construida por Aficionados
Una aeronave construida por aficionados es una aeronave que entra en la categoría de
aeronave experimental. Se diferencia de la aeronave de Kit en cuanto a que ha sido en su
Esta es la definición otorgada por la FAA y será la usada en esta investigación
19
totalidad fabricada por uno o más aficionados a la aviación, ya sea un diseño propio o
construido a partir de unos planos.
2.1.4. Aeronave LSA
Bajo la FAA, una aeronave LSA (Light sport aircraft) es una categoría especial para
aeronaves ligeras, las cuales deben cumplir con las características técnicas descritas bajo
el Anexo 1 de esta Tesis. Asimismo, su diseño y construcción cumplirán con las normas
ASTM F2245, F2279y F2295.
2.1.5. Cálculos Aerodinámicos
2.1.5.1. Cálculos de Lift y Drag en una aeronave. Para cálculos iniciales de lift y drag, se
utilizaron las siguientes formulas:
Lift y Drag en 2 Dimensiones: las fuerzas de lift y drag son representadas por
coeficientes adimensionales definidos por las ecuaciones
𝑳 = 𝒒𝑺𝑪𝑳
𝑫 = 𝒒𝑺𝑪𝑫
Donde S es el área trapezoidal extendida desde la línea central de la aeronave, q es la
presión dinámica del la corriente de aire y está definida por 𝒒 = 𝟏𝟐 𝝆𝑽𝟐. Por definición
las fuerzas de lift son perpendiculares a la dirección de vuelo y las de drag paralelas a la
misma.
Drag parasito para un avión: el drag parasito de un avión está basado en el hecho
de que una aeronave en vuelo de crucero subsónico debido a la fricción de la piel
y otros elementos de la aeronave con el aire experimentara una fuerza de arrastre,
definida por:
𝑪𝑫𝟎= 𝑪𝒇𝒆
𝑺𝒘𝒆𝒕
𝑺𝒓𝒆𝒇
Donde 𝑺𝒘𝒆𝒕 es el área de la aeronave en contacto con la corriente de aire, 𝑺𝒓𝒆𝒇 es el
área total de la aeronave de la aeronave y 𝑪𝒇𝒆 es el coeficiente equivalente de fricción de
la piel definido para flujo laminar como:
𝑪𝒇 = 𝟏.𝟑𝟐𝟖/√𝑹
Donde R es el numero de Reynolds definido por: 𝑹 = 𝝆𝑽𝒍/𝝁.
Para flujo turbulento está definido como:
𝑪𝒇 =𝟎.𝟒𝟓𝟓
(𝒍𝒐𝒈𝑹)𝟐.𝟓𝟖 (𝟏+𝟎.𝟏𝟒𝟒𝑴𝟐)𝟎.𝟔𝟓
20
Para un cálculo más profundo del drag se puede incluir el factor de forma de
componentes (FF) descrito en textos de aerodinámica.4
Drag inducido. El drag inducido es el resultado por la diferencia de presiones en un
ala 3D. Si se considera un ala de envergadura finita, debido a unos torbellinos que
aparecen en los extremos del ala por a la diferencia de presiones entre el extradós
y el intradós, surge la llamada resistencia inducida. Esta resistencia es función de
la sustentación y de ahí que sea directamente proporcional al ángulo de ataque,
mayor sustentación implica mayor resistencia inducida.
El Drag Inducido se determina de la siguiente manera:
𝐶𝑑𝑖 = 𝑘𝐶𝐿2
Donde k representa un factor representado por:
𝐾 =1
𝜋𝐴𝑅𝑒
Donde AR representa la relación de aspecto del ala y e representa el factor de
eficiencia de Oswald.
Factor de Eficiencia de Oswald. Representa teóricamente el drag existente al no
ajustarse el ala usada a la distribución elíptica de la sustentación. Es por esta la
razón por la cual un ala elíptica posee un factor de eficiencia de Oswald = 1.
Aunque existen diversos métodos matemáticos para determinar el factor de
eficiencia de Oswald, para efectos prácticos se aproxima de la siguiente forma5:
𝑒 = 1,78 1 − 0,045𝐴𝑅0,68 − 0,64
Aproximación de Schrenk para la distribución de lift: de acuerdo con la teoría
clásica de alas, para un ala de forma elíptica la distribución de la sustentación y la
carga es también de forma elíptica, para alas de forma trapezoidal la aproximación
de Schrenk se puede usar para estimar la distribución a lo largo de la
envergadura, este método asume que la distribución de carga en un ala sin Twist
tiene una forma que es el promedio de la distribución de carga en un ala elíptica
con la misma envergadura y área.
Para la distribución a lo largo de la cuerda en un ala trapezoidal se usa la siguiente
fórmula:
𝑪 𝒚 = 𝑪𝒓 𝟏 −𝟐𝒚
𝒃(𝟏 − 𝝀)
Y para la distribución a lo largo de la cuerda en un ala elíptica se usa:
4 P. 345, Aircraft design: a conceptual approach. DANIEL RAYMER.
5 P. 361, Aircraft design: a conceptual approach. DANIEL RAYMER

21
𝑪 𝒚 =𝟒𝑺
𝝅𝒃 𝟏 −
𝟐𝒚
𝒃 𝟐
Empuje de la hélice: la hélice es un perfil aerodinámico que rota para generar
empuje tal como el ala genera sustentación, como en el ala las propiedades de la
hélice esta expresadas en parámetros y coeficientes usados para determinar el
empuje de la siguiente forma:
𝑻 =𝑷𝜼𝒑
𝑽=
𝟓𝟓𝟎 𝒃𝒉𝒑
𝑽 (para vuelo recto)
𝑻 =𝒄𝑻
𝒄𝒑
𝑷
𝒏𝑫=
𝒄𝑻
𝒄𝒑
𝟓𝟓𝟎 𝒃𝒉𝒑
𝒏𝑫 (para empuje estático)
Donde:
T = empuje
V = velocidad
P = potencia
n = velocidad de rotación
D = diámetro de la hélice
c = cuerda de la hélice
𝑐𝑝 = coeficiente de potencia 𝒄𝒑 =𝑷
𝝆𝒏𝟑𝑫𝟓 =𝟓𝟓𝟎 𝒃𝒉𝒑
𝝆𝒏𝟑𝑫𝟓
𝑐𝑇 = coeficiente de empuje 𝒄𝑻 =𝑻
𝝆𝒏𝟐𝑫𝟒
2.1.5.2. Velocidades de vuelo. Para los cálculos de las velocidades de vuelo, se utilizaron
las siguientes formulas:
Velocidad de perdida Vs: la velocidad de pérdida es determinada por la carga alar y el máximo coeficiente de lift de la siguiente forma:
𝑉𝑠 = 𝑊
1
2𝜌𝐶𝐿𝑚𝑎𝑥
obtenida del numeral 5.2.4.1 de la norma ASTM 2245
Velocidad Máxima de Vuelo Vh: Esta definida por el empuje máximo disponible y el drag total de la aeronave. Que según la norma ASTM 2245 en el numeral

22
5.2.4.3 esta velocidad no puede ser menor que 4.77 𝑊 𝑆 , y mayor que 0.9𝑉𝐻 ,
donde 𝑉𝐻 es la velocidad a potencia máxima continúa.
Velocidad de maniobra Va. Representa la velocidad máxima a la cual la palanca de mando de la aeronave puede ser movida libremente sin existir posibilidad de fallo estructural. Va puede ser determinada gráficamente mediante el diagrama V/N o bajo la definición presente en el numeral 5.2.4.1 de la norma ASTM 2245:
𝑉𝑎 = 𝑉𝑠√𝑛1
Donde n1 representa el factor de carga máximo positivo de la aeronave.
Velocidad de Crucero. Es la velocidad a la cual la aeronave realiza un vuelo prolongado para efectos de no usar la máxima potencia disponible en el motor. La velocidad crucero se denomina como Vc y según la norma ASTM 2245 se solicita que el valor de la misma en nudos:
o No sea menor que 4.77 𝑊/𝑆
o No sea mayor que 0.9𝑉 al nivel del mar
Donde W representa el peso de la aeronave y S el área alar.
Velocidad de Picado: es la velocidad máxima estructural de la aeronave que según la norma ASTM 2245 en el numeral 5.2.4.4 debe ser un 40% mayor a la velocidad de crucero mínima. 𝑉𝐷 = 1.4𝑉𝐶𝑚𝑖𝑛
.
2.1.5.3. Performance
Rata máxima de ascenso.
- Mejor Ángulo: es la maniobra en la cual el avión alcanza mayor altura con menor distancia horizontal recorrida y es determinada por:
𝜸 = 𝒔𝒆𝒏−𝟏 𝑷𝜼𝒑
𝑽𝑾−
𝑫
𝑾
La mayoría de aeronaves propulsadas por hélice tienen la velocidad de mejor ángulo de ascenso al 85-90% de la velocidad de mejor rata de ascenso.
- Mejor Rata de Ascenso: es la maniobra en la cual la aeronave alcanza mayor altura en menor tiempo transcurrido y es determinada por:
𝑽𝒗 = 𝑽𝒔𝒆𝒏𝜸 =𝑷𝜼𝒑
𝑾−
𝑫𝑽
𝑾
Cálculos de despegue
- Carrera en tierra: durante la carrera de despegue las fuerzas sobre la aeronave son el empuje, el arrastre y la fricción de las ruedas sobre la superficie de la pista y es expresada por:
𝑺𝑮 = 𝑽
𝒂𝒅𝑽
𝑽𝒇
𝑽𝒊
Donde a es la aceleración resultante de la aeronave y esta expresada por:

23
𝒂 =𝒈
𝑾 𝑻 − 𝑫 − µ(𝑾 − 𝑳)
- Transición: durante la transición la aeronave acelera de la velocidad de despegue a la velocidad de ascenso, para determinar le distancia recorrida durante la transición se usa la siguiente fórmula:
𝑺𝑻 = √𝑹𝟐 − (𝑹 − 𝒉𝑻𝑹)𝟐
Cálculos de aterrizaje: el aterrizaje es muy similar al despegue puesto que contiene los mismos elementos de análisis.
- Aproximación: el Angulo de aproximación más pronunciado puede ser determinado por:
𝒔𝒆𝒏𝜸𝒂𝒑𝒑 =𝑻−𝑫
𝑾
Con la potencia en idle y el drag con full flaps.
- Flare: durante el flare la aeronave desacelera de la velocidad de aproximación a la velocidad para asentar ruedas, la distancia recorrida durante esta maniobra puede ser determinada por:
𝑺𝑻 = 𝑹𝒔𝒆𝒏𝜸𝒂𝒑𝒑 = 𝑹 𝑻−𝑫
𝑾
- Carrera en tierra: es la maniobra en la cual la aeronave desacelera de la velocidad para asentar ruedas a la velocidad de rodaje. Y puede ser determinada por la misma fórmula de la carrera en tierra para el despegue teniendo en cuenta que la velocidad inicial (𝑽𝒊) es la misma velocidad para asentar ruedas ( 𝑽𝑻𝑫 ) y la
velocidad final (𝑽𝒇) es cero:
𝑺𝑮 = 𝑽
𝒂𝒅𝑽
𝑽𝒇
𝑽𝒊
Diagrama V/N. Debido a que las cargas alares mas grandes provienen frecuentemente de la generación de lift a elevadas fuerzas G, para efectos de determinar los limites de maniobra de la aeronave y que esta no exceda el factor de carga (n) de diseño, resulta necesario realizar un diagrama que combine diferentes velocidades de vuelo y las cargas máximas posibles en las mismas.

24
Como es visto en la imagen superior, el diagrama Vn integra las diversas velocidades descritas con las cargas máximas permitidas o existentes.
Velocidades de Ráfaga: cuando una aeronave experimenta una ráfaga, el efecto es un aumento o disminución del Angulo de ataque dependiendo de la dirección de esta, dando como resultado un aumento en el factor de carga que puede ser determinado bajo: la norma ASTM 2245-07, numeral X3, de la siguiente forma:
Donde:
- Kg representa el factor de mitigación de ráfaga de la aeronave, el cual está dado por:
- μg representa el radio de masa de la aeronave, el cual está dado por:
- Ude representan las velocidades de ráfaga derivadas, representadas como 15 m/s a la velocidad de crucero y 7.5 m/s a velocidad de picado (según el numeral 5.2.3.3 de la norma ASTM 2245-07
Imagen No 2. Diagrama V/N ejemplificado en la norma ASTM 2245.
Fuente: Norma ASTM F2245 07
25
- ρ representa la densidad del aire en k3/m3
- W/S representa la carga alar en N/m2
Dichas cargas por ráfaga deben ser incorporadas en el diagrama V/N según las condiciones de velocidades de vuelo expresadas anteriormente.
Y según la norma ASTM 2245 en el numeral 5.2.3.3 los factores límites de carga resultantes deben corresponder a las siguientes condiciones:
Positivo (arriba) y negativo (abajo) ráfagas de 15 m/s a (𝑉𝑐).
Ráfagas negativas y positivas de 7.5 m/s a (𝑉𝐷).Velocidades de Ráfaga.
La mezcla entre el diagrama V/N estándar y el diagrama de ráfagas genera un diagrama V/N resultante para la aeronave.
2.1.6. Cálculos Estructurales
2.1.6.1. Esfuerzo Normal. Para miembros sometidos a tensión o a compresión se
determina que el esfuerzo está relacionado de la siguiente forma:
𝜍 =𝐹
𝐴
Donde 𝜍 representa el esfuerzo en relación a la fuerza F y al área transversal A.
2.1.6.2. Esfuerzo Cortante Promedio: Para el caso en el cual la fuerza no actúa en la
dirección del plano seleccionado, se puede estimar el esfuerzo cortante de la siguiente
forma:
𝜏𝑝𝑟𝑜𝑚 = 𝑉/𝐴
Donde (V) representa el valor de la fuerza cortante y (A) el área de la sección.
2.1.6.3. Torsión: En flechas o componentes mecánicos que están sujetos a torsión, es
decir que están sujetos a momentos que tratan de hacer girar al objeto respecto a su eje
longitudinal, se producen esfuerzos cortantes, los cuales son mayores en el exterior, que
en el interior del elemento. Dichos esfuerzos cortantes debido a torsión deben ser
calculados para determinar si los componentes mecánicos de una aeronave soportarán
las cargas en servicio.
El esfuerzo cortante máximo en un elemento sujeto a torsión se define como:
𝜏𝑚𝑎𝑥 =𝑇𝑐
𝐽
Donde:
- T representa el par de torsión (o el momento resultante interno) que actúa sobre la
sección transversal.
- J representa el momento polar de inercia del área de la sección transversal.

26
- c representa el radio exterior del componente sujeto a torsión.
2.1.6.4. Diagramas de Fuerza Cortante y Momento Flexionante.
Diagrama de fuerza cortante
Diagrama de momento flexionante
Esfuerzo debido a flexión: Dado que un elemento sometido a flexión estará
experimentando fuerzas de tensión y compresión con respecto a su eje neutro, es
posible encontrar el esfuerzo máximo que incurrirá de la siguiente forma:
𝜍 max =𝑀𝑐
𝐼
Donde:
- M representa el momento interno máximo resultante
- 𝜍𝑚𝑎𝑥 representa el esfuerzo normal máximo en el miembro que ocurre en el punto
de la sección transversal más alejado del eje neutro.
- c representa la distancia perpendicular del eje neutro al punto más alejado de este
eje y sobre el cual actúa σmax.
- I representa el momento de inercia de la sección transversal calculado respecto al
eje neutro.
2.1.6.5. Esfuerzo cortante transversal: El esfuerzo cortante transversal aparece cuando
hay cargas de flexión, en donde las capas del material tratan de deslizarse entre ellas.
Dado que el punto máximo de esfuerzo cortante transversal se produce en el punto
medio del componente, se debe proceder con cuidado para el análisis de vigas huecas
o tubulares como en el caso de la aeronave Turdus Fuscater.
El esfuerzo cortante transversal esta dado por:
𝜏 =𝑉𝑄
𝐼𝑡
Donde:
- V representa la fuerza cortante interna resultante en el punto a analizar (resultado
del diagrama de fuerzas cortantes.
- I representa el momento de inercia de la sección transversal respecto al eje neutro.
- t representa el ancho de la sección transversal en el punto donde se va a
determinar 𝜏.
- Q representa la integral del área de referencia, es decir la integral del área
transversal que está por encima del punto donde se determinará 𝜏. En sentido mas

27
matemático 𝑄 = 𝑦 ́𝐴´ , donde 𝑦 ́ representa la altura desde el eje neutro hasta el
centroide de 𝐴´ y 𝐴´ el área transversal que está por encima del punto donde se
determinará 𝜏 . Para secciones huecas, o vigas, A´ solo representa el área
transversal del objeto, los espacios sin material no se consideran.
2.1.6.6. Cargas y esfuerzos combinados.
En la mayoría de componentes mecánicos sometidos a cargas y momentos, se presentan
situaciones en donde más de un tipo de fuerza actúa sobre el mismo, por lo cual es
necesario obtener la resultante total de esfuerzos normales y cortantes de los siguientes
tipos de cargas:
Fuerza Normal
Fuerza Cortante Interna
Momento Flexionante
Momento Torsionante
Luego de conocer todas las cargas y los esfuerzos producidos por estas, se debe aplicar
el principio de superposición, en donde por lo general se suman:
- Para calcular el esfuerzo normal se suman los esfuerzos por momento flexionante
con los esfuerzos producidos por la fuerza normal.
- Para calcular los esfuerzos cortantes se suman los esfuerzos por la fuerza cortante
y los esfuerzos por momentos torsionantes.
2.1.6.7. Factor de Seguridad: Representa un margen de seguridad en el diseño
estructural, el cual permite no trabajar siempre al límite de las cargas soportadas para un
diseño dado. Esto resulta particularmente útil e importante en estructuras primarias,
donde una rotura puede considerarse crítica para las vidas de personas. El factor de
seguridad se define matemáticamente como:
𝐹𝑆 =𝑃𝑓𝑎𝑙𝑙𝑎
𝑃𝑝𝑒𝑟𝑚𝑖𝑠𝑖𝑏𝑙𝑒
Para estructuras aeronáuticas cobijadas bajo la norma ASTM 2245, existe un factor de
seguridad distinto para diferentes tipos de estructuras, pasadores, controles u otros
elementos mecánicos de la aeronave. Dicho factor de seguridad para la norma ASTM
2245 se relaciona con las cargas últimas y las cargas limites, en donde pueden ser
definidas como:
- Cargas Limite: Las cargas máximas esperadas a ser soportadas durante el
servicio.
- Cargas Últimas: Las cargas limite multiplicadas por el factor de seguridad.
28
Por lo tanto bajo la norma ASTM 2245, el factor de seguridad puede definirse como:
𝐹. 𝑆 =𝑈𝑙𝑡𝑖𝑚𝑎𝑡𝑒𝐿𝑜𝑎𝑑
𝐿𝑖𝑚𝑖𝑡 𝐿𝑜𝑎𝑑𝑠
2.1.7. Cálculos de Estabilidad y Control
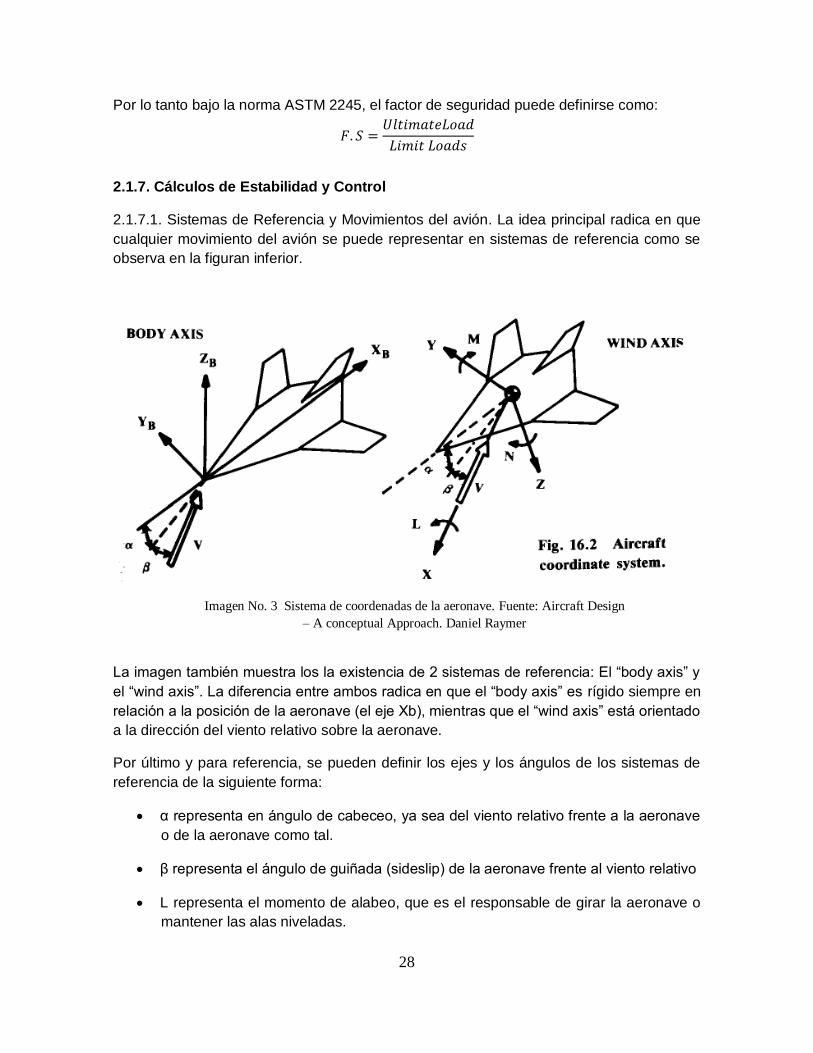
2.1.7.1. Sistemas de Referencia y Movimientos del avión. La idea principal radica en que
cualquier movimiento del avión se puede representar en sistemas de referencia como se
observa en la figuran inferior.
La imagen también muestra los la existencia de 2 sistemas de referencia: El ―body axis‖ y
el ―wind axis‖. La diferencia entre ambos radica en que el ―body axis‖ es rígido siempre en
relación a la posición de la aeronave (el eje Xb), mientras que el ―wind axis‖ está orientado
a la dirección del viento relativo sobre la aeronave.
Por último y para referencia, se pueden definir los ejes y los ángulos de los sistemas de
referencia de la siguiente forma:
α representa en ángulo de cabeceo, ya sea del viento relativo frente a la aeronave
o de la aeronave como tal.
β representa el ángulo de guiñada (sideslip) de la aeronave frente al viento relativo
L representa el momento de alabeo, que es el responsable de girar la aeronave o
mantener las alas niveladas.
Imagen No. 3 Sistema de coordenadas de la aeronave. Fuente: Aircraft Design
– A conceptual Approach. Daniel Raymer
29
M representa el momento de cabeceo.
N representa el momento de guiñada
Los momentos mencionados son usados en cálculos de estabilidad y control ya que
son los responsables de determinar el comportamiento en vuelo de la aeronave. Dado
que dichos momentos incluyen una longitud de brazo desde el lugar, el coeficiente de
momento puede ser calculado de la siguiente forma.
𝐶𝑚 = 𝑀/𝑞𝑆𝑐
𝐶𝑛 = 𝑁/𝑞𝑆𝑏
𝐶𝑙 = 𝐿/𝑞𝑆𝑏
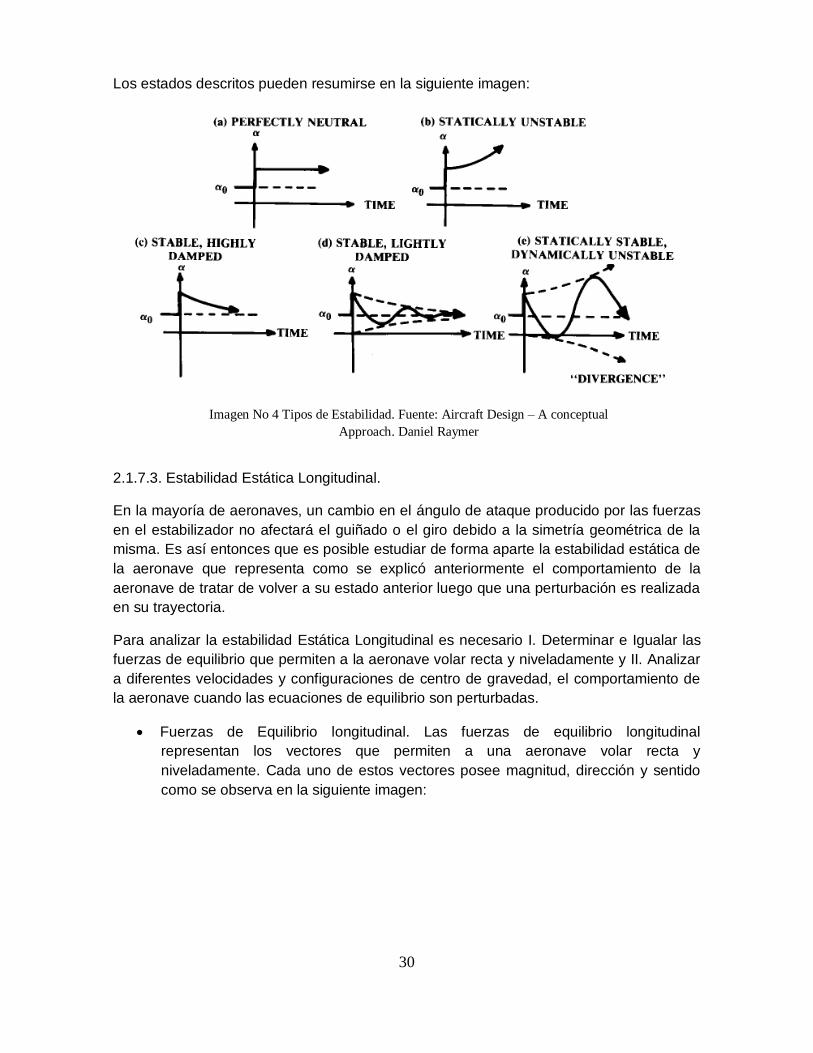
2.1.7.2. Definición y tipos de estabilidad
El concepto básico de estabilidad menciona que una aeronave estable, luego de ser
perturbada, tratara de retornar por si misma a su estado de vuelo original (ya sea en
condiciones de cabeceo, alabeo, guiñado, velocidad u otras perturbaciones posibles).
Cuando se habla de estabilidad en una aeronave inicialmente se define que esta puede
ser:
Inestable: Cuando luego de una perturbación, la aeronave no trata de volver a su
estado inicial, sino que se aleja más del mismo.
Perfectamente neutra: Cuando luego de una perturbación la aeronave queda
permanentemente en el nuevo estado producto de la perturbación.
Estable: Cuando la aeronave, luego de una perturbación trata de volver al estado
inicial.
Para una aeronave estable se entiende entonces que la aeronave tratará de volver al
estado inicial que tenía antes de la perturbación. Sin embargo esto no quiere decir que
luego de cierta cantidad de tiempo llegara permanentemente al mismo. Dado que
dicho proceso puede lograrse mediante diversas oscilaciones, es necesario diferenciar
entre los siguientes conceptos básicos los cuales son:
Estabilidad Estática. Menciona simplemente que la aeronave luego de una
perturbación tratara de llegar al estado inicial que tenia. No obstante no quiere
decir que llegará permanentemente a él.
Estabilidad Dinámica. Menciona que la aeronave tarde o temprano llegara
permanentemente al estado que tenía antes de la perturbación. El hecho que
una aeronave sea estáticamente estable no argumenta que lo sea
dinámicamente. Las oscilaciones de una aeronave estáticamente estable pero
dinámicamente inestable serán cada vez mayores, sin posibilidad de llegar
permanentemente a la posición inicial.
30
Los estados descritos pueden resumirse en la siguiente imagen:
2.1.7.3. Estabilidad Estática Longitudinal.
En la mayoría de aeronaves, un cambio en el ángulo de ataque producido por las fuerzas
en el estabilizador no afectará el guiñado o el giro debido a la simetría geométrica de la
misma. Es así entonces que es posible estudiar de forma aparte la estabilidad estática de
la aeronave que representa como se explicó anteriormente el comportamiento de la
aeronave de tratar de volver a su estado anterior luego que una perturbación es realizada
en su trayectoria.
Para analizar la estabilidad Estática Longitudinal es necesario I. Determinar e Igualar las
fuerzas de equilibrio que permiten a la aeronave volar recta y niveladamente y II. Analizar
a diferentes velocidades y configuraciones de centro de gravedad, el comportamiento de
la aeronave cuando las ecuaciones de equilibrio son perturbadas.
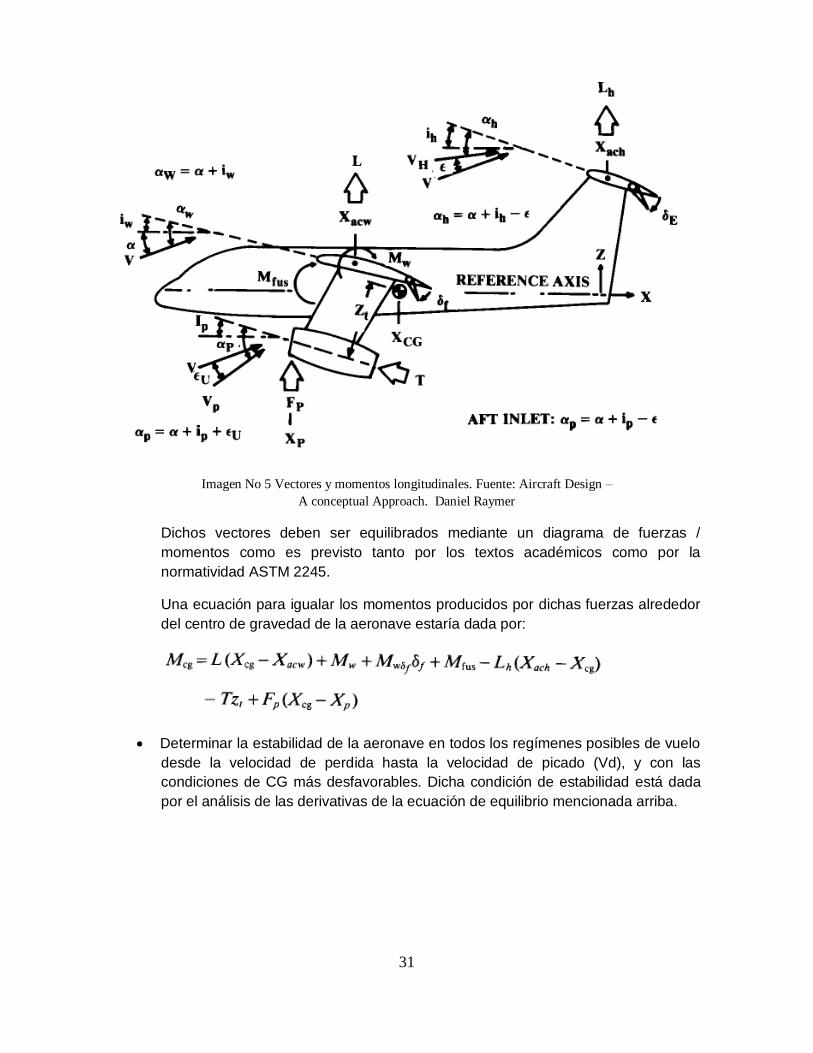
Fuerzas de Equilibrio longitudinal. Las fuerzas de equilibrio longitudinal
representan los vectores que permiten a una aeronave volar recta y
niveladamente. Cada uno de estos vectores posee magnitud, dirección y sentido
como se observa en la siguiente imagen:
Imagen No 4 Tipos de Estabilidad. Fuente: Aircraft Design – A conceptual
Approach. Daniel Raymer
31
Imagen No 5 Vectores y momentos longitudinales. Fuente: Aircraft Design –
A conceptual Approach. Daniel Raymer
Dichos vectores deben ser equilibrados mediante un diagrama de fuerzas /
momentos como es previsto tanto por los textos académicos como por la
normatividad ASTM 2245.
Una ecuación para igualar los momentos producidos por dichas fuerzas alrededor
del centro de gravedad de la aeronave estaría dada por:
Determinar la estabilidad de la aeronave en todos los regímenes posibles de vuelo
desde la velocidad de perdida hasta la velocidad de picado (Vd), y con las
condiciones de CG más desfavorables. Dicha condición de estabilidad está dada
por el análisis de las derivativas de la ecuación de equilibrio mencionada arriba.

32
2.1.7.4. Control direccional y lateral.
El control direccional y lateral implica un análisis longitudinal de la aeronave, por lo tanto
se debe estudiar conjuntamente los movimientos de guiñada (direccional) y alabeo
(lateral), el primero de estos es producido por la deflexión del rudder que incrementa la
sustentación lateral del estabilizador vertical, una fuerza adicional sobre esta superficie es
producida por el flujo rotacional de aire que produce la hélice, otra fuerza es producida por
el empuje asimétrico de la hélice cuando se incrementa el ángulo de ataque debido a que
el lado de la hélice que va en descenso tiene un mayor Angulo de ataque que el lado de la
hélice que va en ascenso. Otra fuerza que produce guiño es ocasionada por la deflexión
de los alerones, debido a que el ala que aumenta su sustentación aumenta también el
drag inducido generando una asimetría de drag en las alas este fenómeno es conocido
como la guiñada adversa.
El movimiento de roll es producido por la deflexión de los alerones, también con la
deflexión del rudder se ocasiona un rol en la aeronave debido a que durante el yaw una
de las alas avanza y la otra retrocede generando mayor sustentación en el ala que avanza
y por lo tanto se genera un roll en la aeronave.
Aquí se presenta entonces la siguiente relación para calcular los coeficientes de momento
para el guiñado y el alabeo de la siguiente forma:
𝐶𝑛𝛽 = 𝐶𝑛𝛽𝑤 + 𝐶𝑛𝛽𝑣 −𝐹𝑝𝛽 ∗ 𝜕𝛽𝑝
𝑞𝑆𝑤 ∗ 𝜕𝛽(𝑋𝑐𝑔 − 𝑋𝑝 )
𝐶𝑙𝛽 = 𝐶𝑙𝛽𝑤 + 𝐶𝑙𝛽𝑣
Imagen No 6. Los momentos y fuerzas de alabeo y guiñado puestos a la par con el cabeceo.
Fuente: Airplane Flight Dynamics and Automatic Flight Controls

33
En donde para el coeficiente de alabeo debido al guiñado 𝐶𝑙𝛽 se puede obtener mediante
las siguientes expresiones:
Y el coeficiente de momento por guiñado 𝐶𝑛𝛽 puede ser obtenido según las siguientes
expresiones:
2.2. MARCO LEGAL
Debido a que uno de los objetivos de esta investigación se resume en determinar la
categoría FAA aplicable a los parámetros de peso y rendimiento de la aeronave, el Marco
Legal de esta investigación corresponde a todos los reglamentos y normatividad existente
para aeronaves experimentales, LSA, Ultraligeros u otras categorías a la cual el Turdus
Fuscater podría aplicar y que podrían determinar si es apta para vuelo.
Por último, para las aeronaves de categoría experimental existen diferentes circulares con
recomendaciones NO obligatorias, sin embargo, debido a la importancia otorgada por la
FAA al cumplimiento de estas recomendaciones, son incluidas dentro del Marco Legal y
tenidas en cuenta en esta investigación.
2.2.1: Normatividad aplicable para aeronaves de Categoría Experimental
2.2.1.1. Advisory Circular AC 20-27G, relacionada con la construcción y operación de
aeronaves experimentales. La misma puede encontrarse en la página de la FAA.
2.2.1.2. Advisory Circular AC-90-89. Amateur Built Aircraft Flight Testing Handbook, la
cual posee recomendaciones de la FAA para realizar vuelos de prueba en aeronaves
experimentales construidas por aficionados y determinar condiciones seguras. La misma
puede encontrarse en la página de la FAA.

34
2.2.2: Normatividad Aplicable a Aeronaves de Categoría LSA
Aunque existe diversa normatividad FAA aplicable a aeronaves LSA, se incluye a
continuación solo la normatividad relevante para el cumplimiento de los objetivos de esta
investigación.
2.2.2.1. Definición FAR 1.1, cuya definición de aeronave LSA es mostrada en el numeral
2.1.4 de esta investigación. La definición de Aeronave LSA mostrada en FAR.1.1 se
tendrá como referencia inicial para determinar si las características básicas de la
aeronave Turdus Fuscater se ajustan a las de una aeronave de Categoría LSA.
2.2.2.2. Estándares ASTM aceptados por la FAA para aeronaves de categoría LSA. En la
cual la FAA acepta el estándar ASTM 2245-09 para el Diseño y el Rendimiento de las
aeronaves de categoría LSA. Este formato se puede hallar en los anexos de esta
investigación.
35
3. METODOLOGÍA
3.1. ENFOQUE. El enfoque de la investigación es netamente analítico, puesto que
requerirá validar matemáticamente una serie de parámetros de diseño. .
3.2. LÍNEA DE INVESTIGACIÓN DE LA UNIVERSIDAD DE SAN BUENAVENTURA
SUB-LÍNEA DE FACULTAD / CAMPO TEMÁTICO DEL PROGRAMA
Línea de Investigación
Universidad de San
Buenaventura
Tecnologías actuales y sociedad.
Sub-Línea
Facultad de Ingeniería
Instrumentación y control de procesos.
Campo temático
Programa de Ingeniería
Aeronáutica
Diseño y construcción de Aeronaves.
3.3. TÉCNICAS DE RECOLECCIÓN DE LA INFORMACIÓN.
El proyecto a desarrollar se basará en primera instancia en la investigación, ya que se
hace necesaria la máxima recolección de información acerca del tema para así tener una
mayor propiedad en el desarrollo de este trabajo de grado, para el cumplimiento de los
objetivos de esta investigación.
La metodología de trabajo para la recolección de información será la siguiente:
I. Se revisará la norma ASTM F2245 para identificar los temas de recopilación de
información, con el objetivo de dar cumplimiento a los numerales especificados en los
objetivos de la misma. Asimismo se revisará la demás normatividad prevista en el Marco
Legal para soportar el uso de la norma ASTM F2245
36
II. Se acudirá a recopilar cualquier información pertinente al proyecto Turdus Fuscater I
realizada anteriormente en proyectos integradores
III. Se acudirá a diversas fuentes de información escrita y digital tales como internet y
bibliotecas para adquirir o reforzar los conocimientos que permitan realizar los análisis
requeridos por la norma ASTM F2245.
IV. Se consultará con diversos profesionales que tengan experiencia en certificación
ASTM 2245, con el objetivo de recolectar información de ―como‖ cumplir con los requisitos
de la norma.
Secuencia y tipo de actividades que se desarrollarán:
(SE ANEXA DIAGRAMA DE ACTIVIDADES EN PROJECT – ANEXO 2)
I. Recopilación de Información General sobre:
a. Metodologías y Antecedentes de diseño de Aeronaves Experimentales y LSA.
b. Normatividad aeronaves experimentales y LSA.
c. Métodos de validación de aeronaves experimentales y LSA
d. Métodos numéricos para cálculos aerodinámicos y estructurales.
II. Recopilación de Información Específica (Turdus Fuscater I).
a. Recopilación de la información de diseño del Turdus Fuscater I
b. Validación de la información recolectada con la estructura existente
c. Modelado del aeronave en Solid Edge y determinación de pesos y centros de masa.
III. Recolección de Información Específica (Aerodinámica y comportamiento de vuelo).
a. Desarrollo analítico
b. Análisis y cálculo mediante software u otras herramientas computacionales (Excel,
AAA, ect)
37
c. Comparación de resultados y conclusiones
IV. Análisis del comportamiento estructural y cambios en el Turdus Fuscater I.
a. Simulación computacional de la estructura primaria según cargas aerodinámicas y de
vuelo.
b. Análisis Técnico de los Resultados Obtenidos en la Simulación.
c. Determinación de cambios a realizar en la aeronave.
d. Análisis de la aeronave según los cambios propuestos.
e. Conclusiones.
V. Análisis de resultados, determinación de las condiciones de vuelo del Turdus Fuscater I
según la normatividad o referencias escogidas.
3.4 CUMPLIMIENTO DE OBJETIVOS-HERRAMIENTA.
Para el cumplimiento de los objetivos se contempla principalmente el uso de modelos
numéricos existentes. No obstante debido al gran número de operaciones a realizar y aun
mas importante, a los cambios en el diseño que posiblemente deban ser realizados, se
requiere el uso de una herramienta computarizada que ayude a recopilar y analizar datos
rápidamente.
3.5. HIPOTESIS
“Mediante un respaldo matemático y teniendo como referencia la norma ASTM 2245,
resulta posible concluir de manera preliminar si la aeronave Turdus Fuscater es segura
para vuelo”.
3.6 VARIABLES
3.6.1. Variables Independientes: Las variables independientes de esta investigación
están representadas en toda la información ya existente en la aeronave física y de donde
partirá todo el análisis. Algunas de las variables independientes son:
38
El peso de la aeronave (W).
Las dimensiones de la aeronave.
Los materiales de la aeronave existente y sus propiedades mecánicas.
El tipo de motor, peso y potencia.
3.6.2. Variables dependientes: Las variables dependientes de esta investigación
representan todos los parámetros que serán determinados a partir de las variables
independientes. Estos parámetros a determinar se resumen en los parámetros requeridos
por la norma ASTM 2245 o necesarios para obtener conclusiones de los parámetros
requeridos por la misma. Entre las variables dependientes están:
Las características aerodinámicas & performance: Lift, drag, drag inducido, distancia de
despegue, etc.
Las características de estabilidad y control como: Coeficiente de momentos de
guiñado, cabeceo y alabeo.
Las características estructurales como cargas soportadas, esfuerzos, carga por unidad
alar, etc.

39
4. DESARROLLO INGENIERIL
4.1. CALCULO DEL PESO Y BALANCE DE LA AERONAVE TURDUS FUSCATER I
4.1.1. Elaboración del modelo en CAD
Con el objetivo de realizar el peso y balance de la aeronave Turdus Fuscater I; y para
efectos prácticos, resulta conveniente modelar la aeronave con sus características físicas
reales en un software CAD, para hallar pesos, centros de masa, y otros parámetros físicos
que sirvan de referencia para cálculos posteriores.
4.1.1.1. Recopilación de información de la aeronave Turdus Fuscater I.
Se procedió a recopilar información del proyecto Turdus Fuscater I existente tanto en
documentos como físicamente. Con dicha información se procedió a realizar una
descripción de la aeronave para posteriormente ser ingresada al software CAD y ser
modelada.
4.1.1.2. Descripción de la aeronave Turdus Fuscater I.
- Descripción:
El Turdus Fuscater I es una aeronave monomotor de plano alto y tren de aterrizaje fijo. La
instalación del sistema motopropulsor posee un motor ROTAX 912UL de 80hp, es de tipo
pusher y está diseñada para ser instalada en la parte superior de las alas. La estructura
de la aeronave es de tipo tubular en acero 1020 de 25,4 mm de diámetro externo y un
espesor de 2,7mm. La estructura de las alas posee un perfil NACA 4412, sin diedro
geometrico y es soportada por cables de acero de 0.01m de diametro. La cola posee una
cercha en tubería de acero la cual soporta los estabilizadores y el timón. Tanto el
estabilizador horizontal como el vertical son superficies planas sin ningún tipo de perfil. El
Turdus Fuscater I posee un tren de aterrizaje tipo triciclo. El tren delantero tiene conexión
directa al sistema de rudder. El tren principal posee ruedas y amortiguadores de
automóvil. La estructura de la cabina esta realizada en acero tubular y posee espacio para
dos ocupantes en configuración tándem.
- Dimensiones
Las siguientes son las dimensiones documentadas del Turdus Fuscater I y posteriormente
corregidas con la aeronave real.

40
DIMENSIONES DEL TURDUS FUSCATER I
pies metros
Longitud Aeronave 22,79 6,95
GRUPO ALA
Envergadura 33,46 10,20
Cuerda 4,10 1,25
Espesor Max 0,41 0,13
Ubicación Espesor Máximo desde LE 1,12 0,34
Porcentaje ubicación del Centro Aerodinámico con respecto a la Cuerda 27,28% 27,28%
Perfil NACA 4412
Taperado 1
Twist 0
Área Alar (ft2 o mt2) 137,17 12,75
GRUPO ESTABILIZADOR pies metros
Envergadura Hstab 9,84 3,00
Cuerda Hstab 3,59 1,10
Altura Vstab 4,23 1,29
Área Hstab 35,37 3,29
Ubicación del centro aerodinámico en relación a la cuerda 0,25 0,25
Área Estabilizador (ft2 o mt2) 35,37 3,29
FUSELAJE
Longitud sección trasera 14,91 4,55
Longitud sección delantera 7,88 2,40
Ancho máximo 2,13 0,66
4.1.1.3. Modelamiento de la aeronave en CAD
Luego de recopilar información sobre la aeronave Turdus Fuscater I se procedió a
modelar la misma en CAD. Se escogió el software Solid Edge ST2 por estar presente en
la Universidad y por ser compatible con diversas plataformas que podrían ser usadas en
análisis posteriores. El modelamiento se realizó incorporando las dimensiones exactas de
los elementos y el tipo de material con el objetivo de utilizar la opción ―Propiedades‖ de l
software seleccionado y determinar centroides y pesos.
Los planos, renders y otros detalles del modelamiento pueden observarse en el Anexo 3
de este documento.
41
Imagen No 7. Render del modelado inicial de la aeronave Turdus Fuscater. Fuente: Autor
.
4.1.2 Peso y Balance Turdus Fuscater I
- Componentes de la aeronave no existentes o no determinados
Existen diversos componentes de la aeronave que no fueron determinados o
documentados y cuya determinación es requerida para efectos del peso y balance. Para
efectos de obtener medidas de peso y balance más acertadas, dichos elementos fueron
incorporados con un criterio de ingeniería, datos de los fabricantes de los componentes y
referenciándose a otras aeronaves similares.
- Peso x secciones de la aeronave: Los pesos de las secciones de la aeronave estimados
mediante el software seleccionado son los siguientes:
PESOS SECCIONES AERONAVE SEGÚN EL SOFTWARE CAD
Item Kg Observaciones
ALAS 108,26
COLA - FUSELAJE TRASERO 68,01
TREN DELANTERO 3,23
FUSELAJE FRONTAL 37,61
TREN PRINCIPAL 25,10
SUBTOTAL 242,20
MOTOR ROTAX UL 80hp 61,00
Carburadores y accesorios (Motor instalado) FUENTE: Especificaciones
Técnicas Motor Rotax
HELICE SENSENIC COMPOSITE 3,97 Fuente: Fabricante
TOTAL ESTRUCTURA CON MOTOR Y HELICE 307,17
42
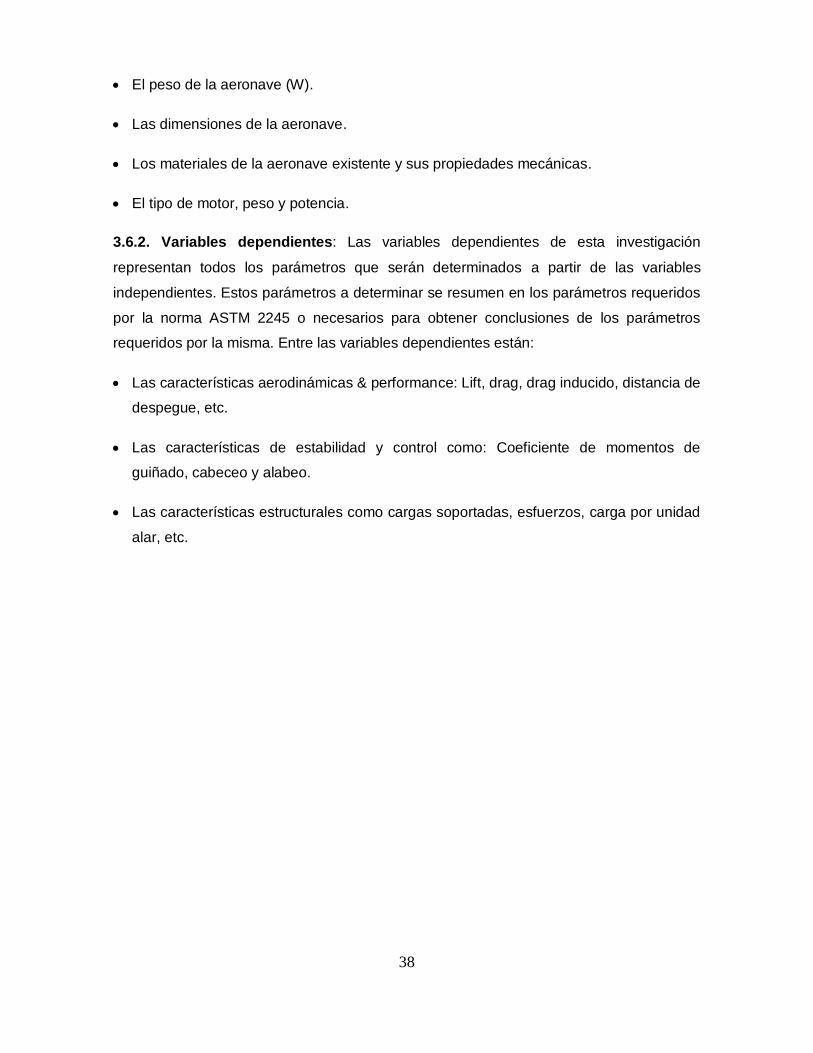
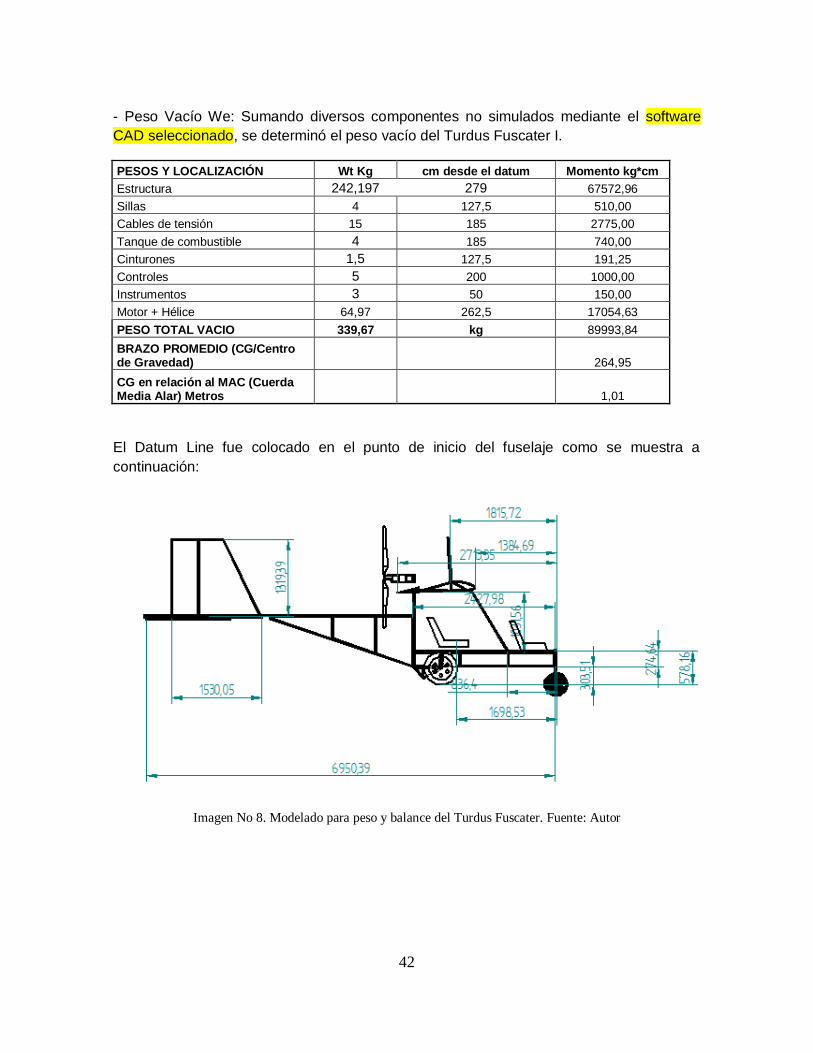
- Peso Vacío We: Sumando diversos componentes no simulados mediante el software
CAD seleccionado, se determinó el peso vacío del Turdus Fuscater I.
PESOS Y LOCALIZACIÓN Wt Kg cm desde el datum Momento kg*cm
Estructura 242,197 279 67572,96
Sillas 4 127,5 510,00
Cables de tensión 15 185 2775,00
Tanque de combustible 4 185 740,00
Cinturones 1,5 127,5 191,25
Controles 5 200 1000,00
Instrumentos 3 50 150,00
Motor + Hélice 64,97 262,5 17054,63
PESO TOTAL VACIO 339,67 kg 89993,84
BRAZO PROMEDIO (CG/Centro de Gravedad) 264,95
CG en relación al MAC (Cuerda Media Alar) Metros 1,01
El Datum Line fue colocado en el punto de inicio del fuselaje como se muestra a
continuación:
Imagen No 8. Modelado para peso y balance del Turdus Fuscater. Fuente: Autor
43
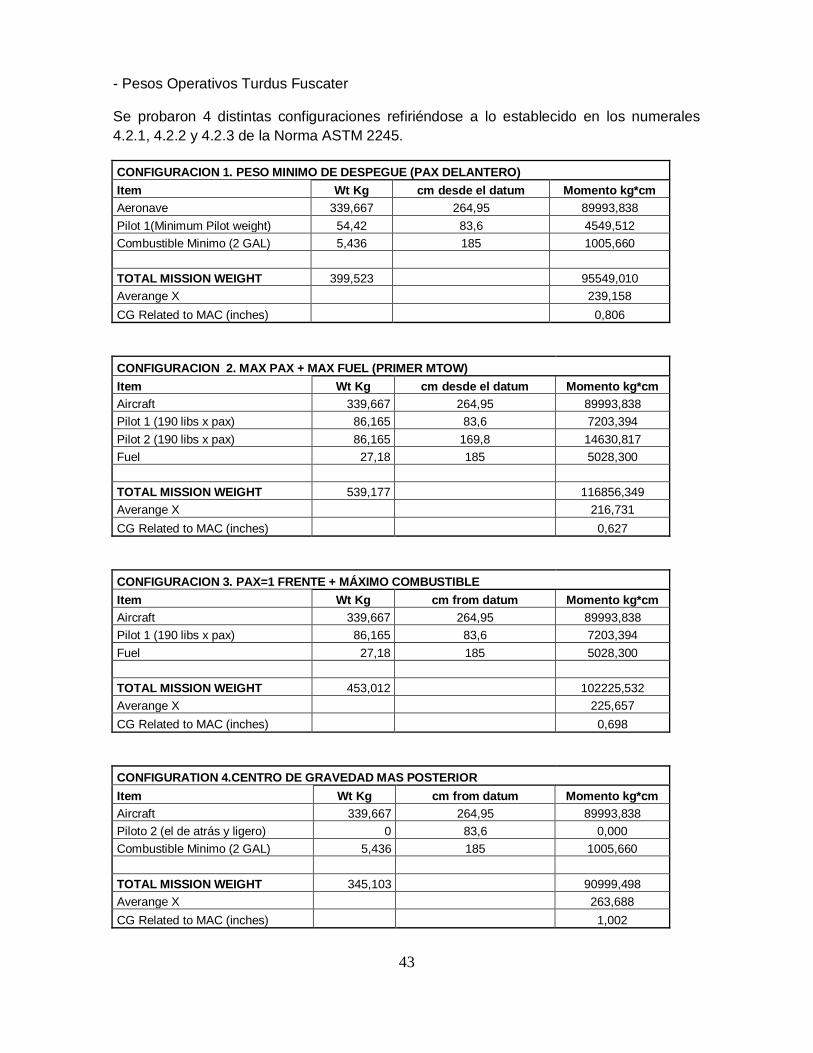
- Pesos Operativos Turdus Fuscater
Se probaron 4 distintas configuraciones refiriéndose a lo establecido en los numerales
4.2.1, 4.2.2 y 4.2.3 de la Norma ASTM 2245.
CONFIGURACION 1. PESO MINIMO DE DESPEGUE (PAX DELANTERO)
Item Wt Kg cm desde el datum Momento kg*cm
Aeronave 339,667 264,95 89993,838
Pilot 1(Minimum Pilot weight) 54,42 83,6 4549,512
Combustible Minimo (2 GAL) 5,436 185 1005,660
TOTAL MISSION WEIGHT 399,523
95549,010
Averange X
239,158
CG Related to MAC (inches)
0,806
CONFIGURACION 2. MAX PAX + MAX FUEL (PRIMER MTOW)
Item Wt Kg cm desde el datum Momento kg*cm
Aircraft 339,667 264,95 89993,838
Pilot 1 (190 libs x pax) 86,165 83,6 7203,394
Pilot 2 (190 libs x pax) 86,165 169,8 14630,817
Fuel 27,18 185 5028,300
TOTAL MISSION WEIGHT 539,177 116856,349
Averange X 216,731
CG Related to MAC (inches) 0,627
CONFIGURACION 3. PAX=1 FRENTE + MÁXIMO COMBUSTIBLE
Item Wt Kg cm from datum Momento kg*cm
Aircraft 339,667 264,95 89993,838
Pilot 1 (190 libs x pax) 86,165 83,6 7203,394
Fuel 27,18 185 5028,300
TOTAL MISSION WEIGHT 453,012 102225,532
Averange X 225,657
CG Related to MAC (inches) 0,698
CONFIGURATION 4.CENTRO DE GRAVEDAD MAS POSTERIOR
Item Wt Kg cm from datum Momento kg*cm
Aircraft 339,667 264,95 89993,838
Piloto 2 (el de atrás y ligero) 0 83,6 0,000
Combustible Minimo (2 GAL) 5,436 185 1005,660
TOTAL MISSION WEIGHT 345,103 90999,498
Averange X 263,688
CG Related to MAC (inches) 1,002
44
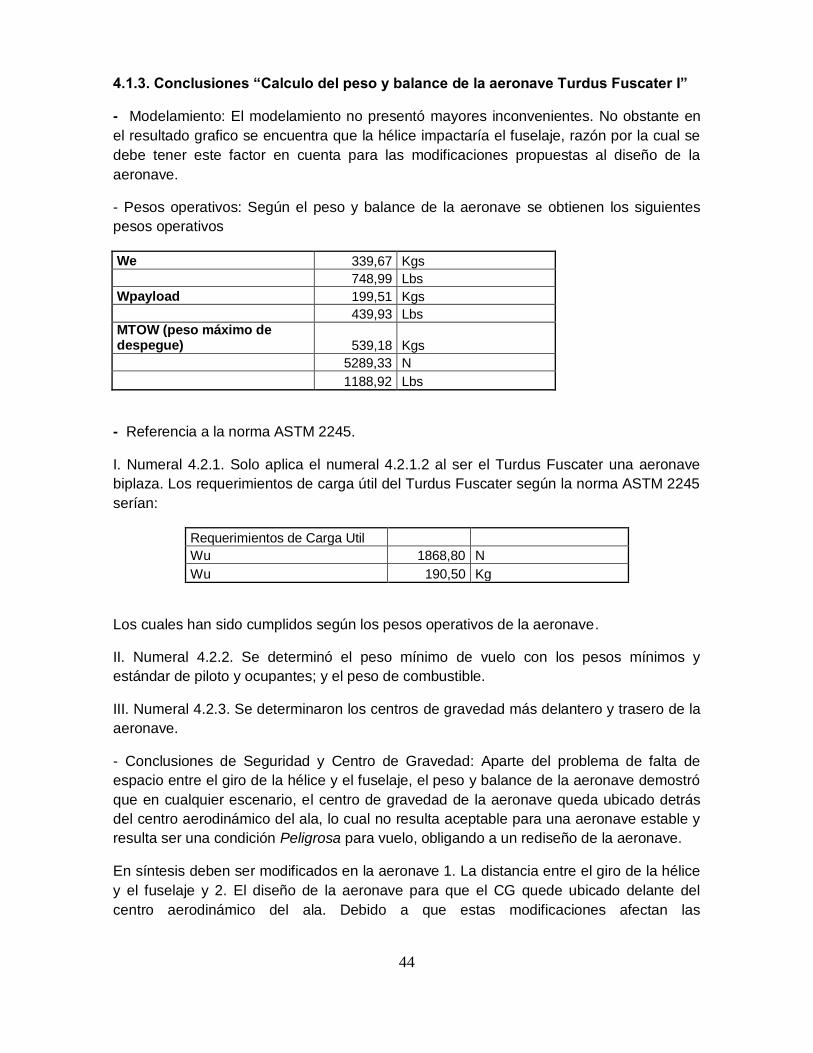
4.1.3. Conclusiones “Calculo del peso y balance de la aeronave Turdus Fuscater I”
- Modelamiento: El modelamiento no presentó mayores inconvenientes. No obstante en
el resultado grafico se encuentra que la hélice impactaría el fuselaje, razón por la cual se
debe tener este factor en cuenta para las modificaciones propuestas al diseño de la
aeronave.
- Pesos operativos: Según el peso y balance de la aeronave se obtienen los siguientes
pesos operativos
We 339,67 Kgs
748,99 Lbs
Wpayload 199,51 Kgs
439,93 Lbs MTOW (peso máximo de despegue) 539,18 Kgs
5289,33 N
1188,92 Lbs
- Referencia a la norma ASTM 2245.
I. Numeral 4.2.1. Solo aplica el numeral 4.2.1.2 al ser el Turdus Fuscater una aeronave
biplaza. Los requerimientos de carga útil del Turdus Fuscater según la norma ASTM 2245
serían:
Requerimientos de Carga Util
Wu 1868,80 N
Wu 190,50 Kg
Los cuales han sido cumplidos según los pesos operativos de la aeronave.
II. Numeral 4.2.2. Se determinó el peso mínimo de vuelo con los pesos mínimos y
estándar de piloto y ocupantes; y el peso de combustible.
III. Numeral 4.2.3. Se determinaron los centros de gravedad más delantero y trasero de la
aeronave.
- Conclusiones de Seguridad y Centro de Gravedad: Aparte del problema de falta de
espacio entre el giro de la hélice y el fuselaje, el peso y balance de la aeronave demostró
que en cualquier escenario, el centro de gravedad de la aeronave queda ubicado detrás
del centro aerodinámico del ala, lo cual no resulta aceptable para una aeronave estable y
resulta ser una condición Peligrosa para vuelo, obligando a un rediseño de la aeronave.
En síntesis deben ser modificados en la aeronave 1. La distancia entre el giro de la hélice
y el fuselaje y 2. El diseño de la aeronave para que el CG quede ubicado delante del
centro aerodinámico del ala. Debido a que estas modificaciones afectan las
45
características estructurales y aerodinámicas, deberán ser solucionadas al menos
preliminarmente antes de realizar cálculos adicionales en la aeronave.
4.1.4. Correcciones al peso y balance y modelamiento de la aeronave Turdus
Fuscater I
4.1.4.1. Análisis de Soluciones
En base a los dos inconvenientes identificados en el numeral anterior se procede a dar
solución a los mismos de la siguiente forma:
- Giro libre de la hélice: Consultados diferentes fabricantes se concluye que los diámetros
propuestos de hélice no cambian a los modelados en CAD. Aunque es posible adaptar el
conjunto con un diámetro inferior, no resulta recomendado para aeronave de vuelo muy
lento como el Turdus Fuscater I.
Fabricantes Helice Diámetro
WarpdriveProps 72"
Sensenich 70"
Powerfin 70"
En este orden de ideas, se propone modificar la estructura trasera del fuselaje para
permitir el giro de la hélice, tratando en la medida de lo posible de no elevar verticalmente
el conjunto motopropulsor en aras de la estabilidad y control de la aeronave.
- Peso y balance de la aeronave: El cualquier evento el peso y balance de la aeronave
Turdus Fuscater I muestra como conclusión que la aeronave es inestable. En aras de la
seguridad de vuelo se propone inicialmente que el centro de gravedad de la aeronave se
sitúe a 0,13 del MAC en condiciones de MTOW, es decir con 2 pilotos y combustible
completo. Para cumplir con este objetivo se opta por la siguiente solución:
I. Reducir el peso de la sección trasera del fuselaje, iniciando por la cercha y finalizando
en los estabilizadores y alerones. Se deberá analizar las fuerzas en las superficies de
control según la Norma ASTM 2245 para determinar las características físicas de la nueva
superficie.
II. Reemplazar el tren de aterrizaje por uno más ligero. Dado que en los objetivos de esta
tesis se encuentra solo el análisis estructural de los elementos primarios de la aeronave,
el tren de aterrizaje no será calculado, por lo cual se propone reemplazar el tren de
aterrizaje principal por uno conseguido en el mercado, el cual será indudablemente más
ligero y ayudará a que el CG pueda ubicarse más adelante.
III. Ubicación del piloto. En caso que se determine mediante CAD que las dos soluciones
anteriores no fueron satisfactorias, se propone extender la parte delantera del fuselaje, y
la silla delantera, con el objetivo de llevar más hacia delante el centro de gravedad de la
aeronave.
46
IV. Desplazar el motor hacia delante: Colocar el motor en una posición más delantera y
accionar la hélice mediante un eje lo suficientemente largo.
4.1.4.2. Desarrollo de Soluciones
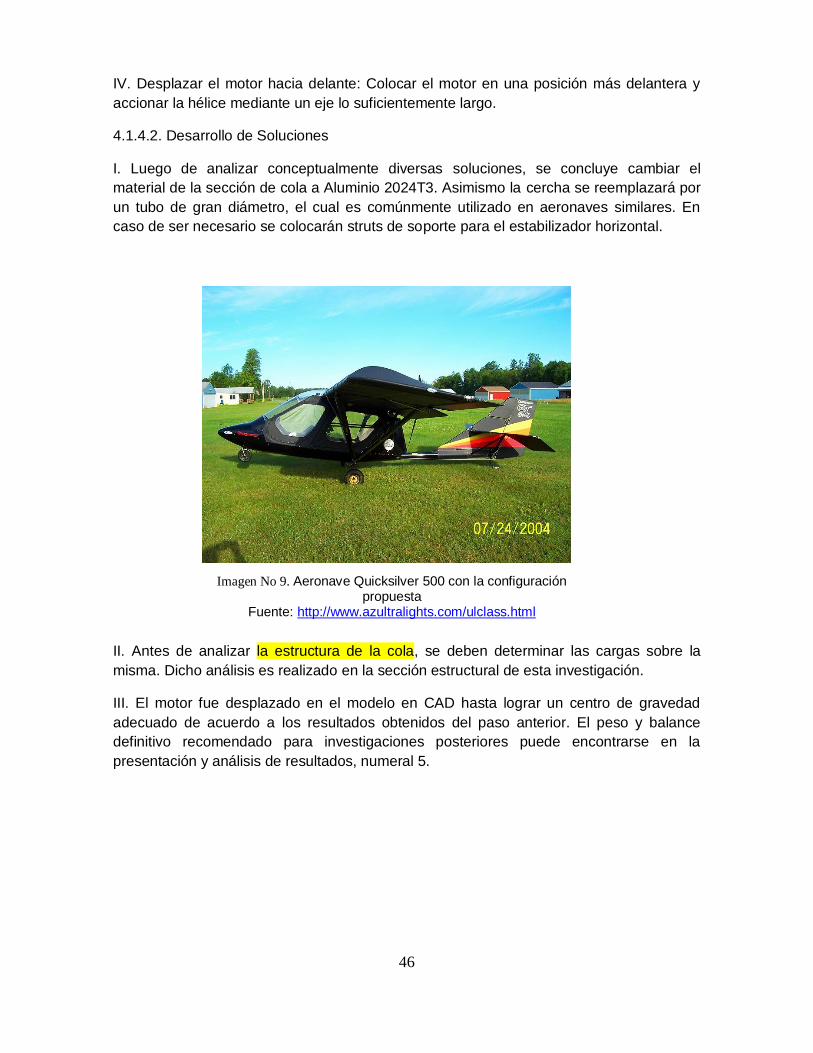
I. Luego de analizar conceptualmente diversas soluciones, se concluye cambiar el
material de la sección de cola a Aluminio 2024T3. Asimismo la cercha se reemplazará por
un tubo de gran diámetro, el cual es comúnmente utilizado en aeronaves similares. En
caso de ser necesario se colocarán struts de soporte para el estabilizador horizontal.
II. Antes de analizar la estructura de la cola, se deben determinar las cargas sobre la
misma. Dicho análisis es realizado en la sección estructural de esta investigación.
III. El motor fue desplazado en el modelo en CAD hasta lograr un centro de gravedad
adecuado de acuerdo a los resultados obtenidos del paso anterior. El peso y balance
definitivo recomendado para investigaciones posteriores puede encontrarse en la
presentación y análisis de resultados, numeral 5.
Imagen No 9. Aeronave Quicksilver 500 con la configuración propuesta
Fuente: http://www.azultralights.com/ulclass.html
47
4.2. CALCULO DE CARACTERISTICAS AERODINÁMICAS DE LA AERONAVE
TURDUS FUSCATER I
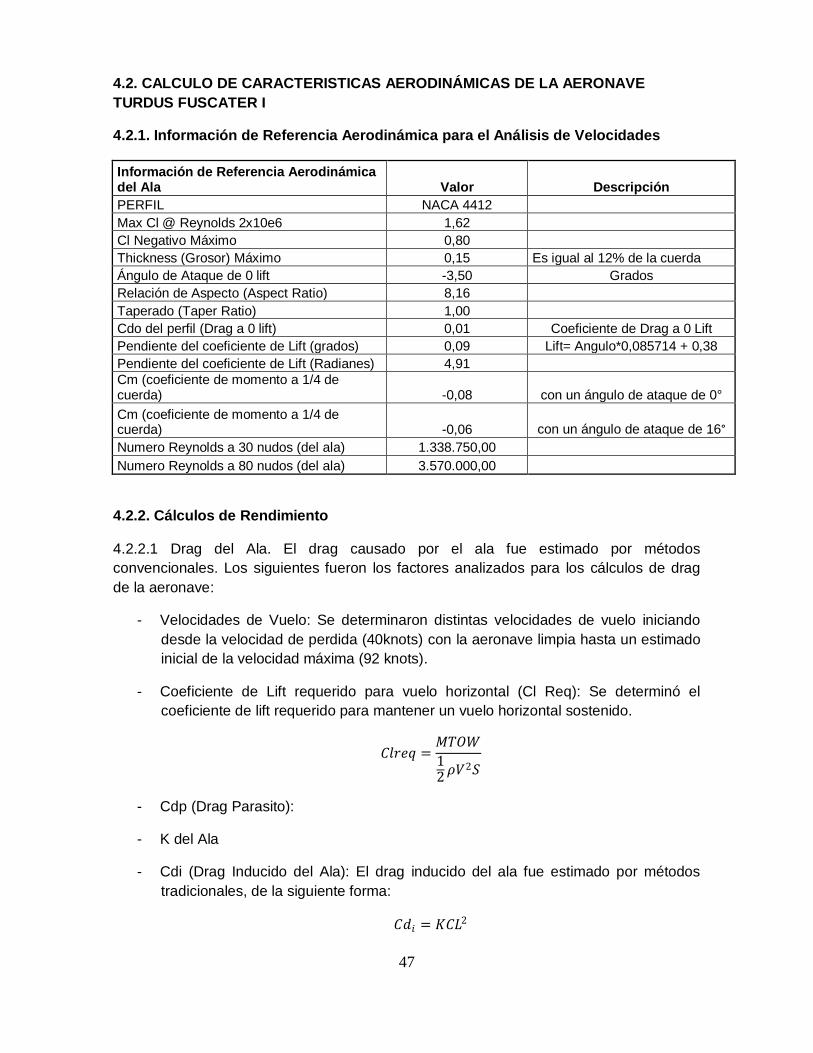
4.2.1. Información de Referencia Aerodinámica para el Análisis de Velocidades
Información de Referencia Aerodinámica del Ala Valor Descripción
PERFIL NACA 4412
Max Cl @ Reynolds 2x10e6 1,62
Cl Negativo Máximo 0,80
Thickness (Grosor) Máximo 0,15 Es igual al 12% de la cuerda
Ángulo de Ataque de 0 lift -3,50 Grados
Relación de Aspecto (Aspect Ratio) 8,16
Taperado (Taper Ratio) 1,00
Cdo del perfil (Drag a 0 lift) 0,01 Coeficiente de Drag a 0 Lift
Pendiente del coeficiente de Lift (grados) 0,09 Lift= Angulo*0,085714 + 0,38
Pendiente del coeficiente de Lift (Radianes) 4,91
Cm (coeficiente de momento a 1/4 de cuerda) -0,08 con un ángulo de ataque de 0°
Cm (coeficiente de momento a 1/4 de cuerda) -0,06 con un ángulo de ataque de 16°
Numero Reynolds a 30 nudos (del ala) 1.338.750,00
Numero Reynolds a 80 nudos (del ala) 3.570.000,00
4.2.2. Cálculos de Rendimiento
4.2.2.1 Drag del Ala. El drag causado por el ala fue estimado por métodos
convencionales. Los siguientes fueron los factores analizados para los cálculos de drag
de la aeronave:
- Velocidades de Vuelo: Se determinaron distintas velocidades de vuelo iniciando
desde la velocidad de perdida (40knots) con la aeronave limpia hasta un estimado
inicial de la velocidad máxima (92 knots).
- Coeficiente de Lift requerido para vuelo horizontal (Cl Req): Se determinó el
coeficiente de lift requerido para mantener un vuelo horizontal sostenido.
𝐶𝑙𝑟𝑒𝑞 =𝑀𝑇𝑂𝑊
12 𝜌𝑉2𝑆
- Cdp (Drag Parasito):
- K del Ala
- Cdi (Drag Inducido del Ala): El drag inducido del ala fue estimado por métodos
tradicionales, de la siguiente forma:
𝐶𝑑𝑖 = 𝐾𝐶𝐿2
48
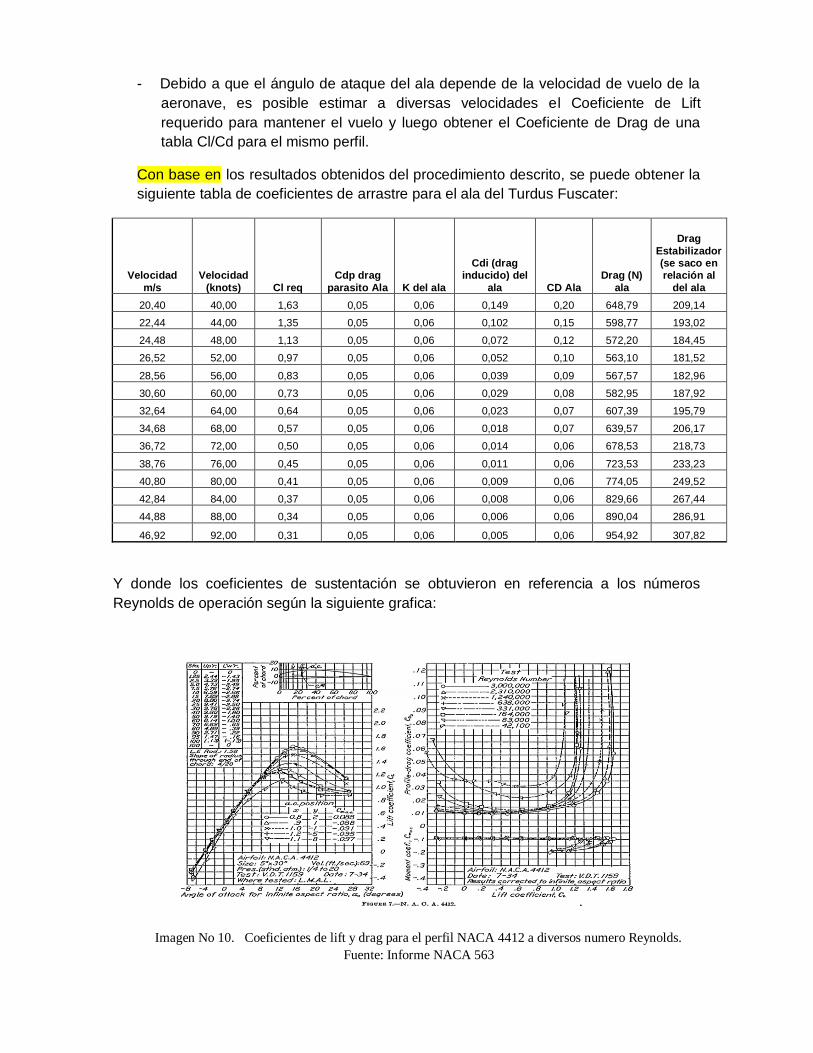
- Debido a que el ángulo de ataque del ala depende de la velocidad de vuelo de la
aeronave, es posible estimar a diversas velocidades el Coeficiente de Lift
requerido para mantener el vuelo y luego obtener el Coeficiente de Drag de una
tabla Cl/Cd para el mismo perfil.
Con base en los resultados obtenidos del procedimiento descrito, se puede obtener la
siguiente tabla de coeficientes de arrastre para el ala del Turdus Fuscater:
Velocidad
m/s
Velocidad
(knots) Cl req
Cdp drag
parasito Ala K del ala
Cdi (drag inducido) del
ala CD Ala
Drag (N)
ala
Drag
Estabilizador (se saco en relación al
del ala
20,40 40,00 1,63 0,05 0,06 0,149 0,20 648,79 209,14
22,44 44,00 1,35 0,05 0,06 0,102 0,15 598,77 193,02
24,48 48,00 1,13 0,05 0,06 0,072 0,12 572,20 184,45
26,52 52,00 0,97 0,05 0,06 0,052 0,10 563,10 181,52
28,56 56,00 0,83 0,05 0,06 0,039 0,09 567,57 182,96
30,60 60,00 0,73 0,05 0,06 0,029 0,08 582,95 187,92
32,64 64,00 0,64 0,05 0,06 0,023 0,07 607,39 195,79
34,68 68,00 0,57 0,05 0,06 0,018 0,07 639,57 206,17
36,72 72,00 0,50 0,05 0,06 0,014 0,06 678,53 218,73
38,76 76,00 0,45 0,05 0,06 0,011 0,06 723,53 233,23
40,80 80,00 0,41 0,05 0,06 0,009 0,06 774,05 249,52
42,84 84,00 0,37 0,05 0,06 0,008 0,06 829,66 267,44
44,88 88,00 0,34 0,05 0,06 0,006 0,06 890,04 286,91
46,92 92,00 0,31 0,05 0,06 0,005 0,06 954,92 307,82
Y donde los coeficientes de sustentación se obtuvieron en referencia a los números
Reynolds de operación según la siguiente grafica:
Imagen No 10. Coeficientes de lift y drag para el perfil NACA 4412 a diversos numero Reynolds.
Fuente: Informe NACA 563
49
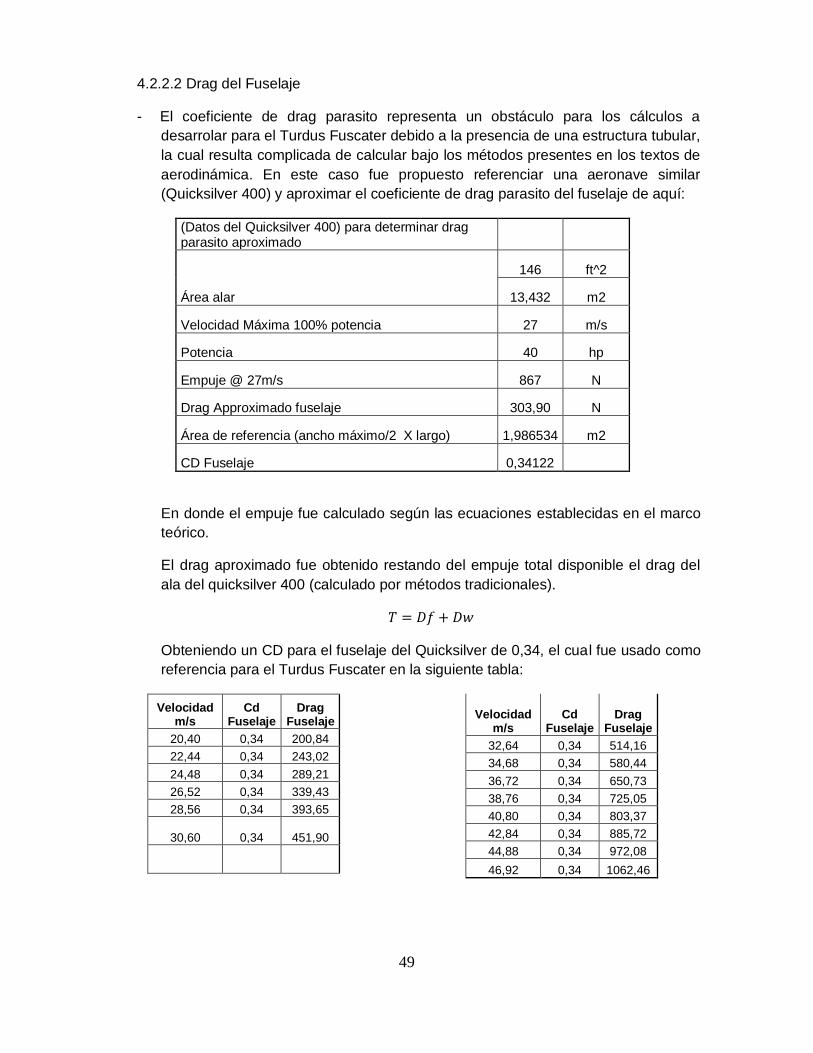
4.2.2.2 Drag del Fuselaje
- El coeficiente de drag parasito representa un obstáculo para los cálculos a
desarrolar para el Turdus Fuscater debido a la presencia de una estructura tubular,
la cual resulta complicada de calcular bajo los métodos presentes en los textos de
aerodinámica. En este caso fue propuesto referenciar una aeronave similar
(Quicksilver 400) y aproximar el coeficiente de drag parasito del fuselaje de aquí:
(Datos del Quicksilver 400) para determinar drag parasito aproximado
Área alar
146 ft^2
13,432 m2
Velocidad Máxima 100% potencia 27 m/s
Potencia 40 hp
Empuje @ 27m/s 867 N
Drag Approximado fuselaje 303,90 N
Área de referencia (ancho máximo/2 X largo) 1,986534 m2
CD Fuselaje 0,34122
En donde el empuje fue calculado según las ecuaciones establecidas en el marco
teórico.
El drag aproximado fue obtenido restando del empuje total disponible el drag del
ala del quicksilver 400 (calculado por métodos tradicionales).
𝑇 = 𝐷𝑓 + 𝐷𝑤
Obteniendo un CD para el fuselaje del Quicksilver de 0,34, el cual fue usado como
referencia para el Turdus Fuscater en la siguiente tabla:
Velocidad m/s
Cd Fuselaje
Drag Fuselaje
20,40 0,34 200,84
22,44 0,34 243,02
24,48 0,34 289,21
26,52 0,34 339,43
28,56 0,34 393,65
30,60 0,34 451,90
Velocidad
m/s
Cd
Fuselaje
Drag
Fuselaje
32,64 0,34 514,16
34,68 0,34 580,44
36,72 0,34 650,73
38,76 0,34 725,05
40,80 0,34 803,37
42,84 0,34 885,72
44,88 0,34 972,08
46,92 0,34 1062,46

50
4.2.2.3. Drag debido al cableado externo. La aeronave Turdus Fuscater posee una serie
de tensores estructurales cuya función es transportar las cargas de las alas al fuselaje.
Dichos tensores generar una cantidad de drag considerable, razón por la cual fueron
analizados por separado en este caso.
Para determinar la cantidad de drag generada por el cableado externo se determino
inicialmente la longitud en metros de cableado existente en la aeronave Posteriormente se
determino que los tensores actúan aerodinámicamente como un cilindro, para lo cual se
determinaron los valores de Cd de un cilindro al número Reynolds operativo. Como paso
final se determino la fuerza de drag a distintas velocidades para el cableado externo.
Drag debido a cableado externo
Diametro Cable 0,01 m
Longitud total de cables expuestos a la corriente fluida 30 m
Numero reynolds @40 knots 14280
Numero reynolds @80 knots 28560
Cd6 0,98
Fuerza de Drag @ 40 knots 73,410624 N
Fuerza de Drag @ 80 knots 293,642496 N
Y de aquí, obteniendo los siguientes valores de arrastre según el cableado externo:
Velocidad m/s
Drag Cableado Externo
20,40 74,63
22,44 90,31
24,48 107,47
26,52 126,13
28,56 146,28
30,60 167,93
32,64 191,06
34,68 215,69
36,72 241,81
38,76 269,43
40,80 298,54
42,84 329,14
44,88 361,23
46,92 394,81
6 Fundamentals of Aerodynamics
51
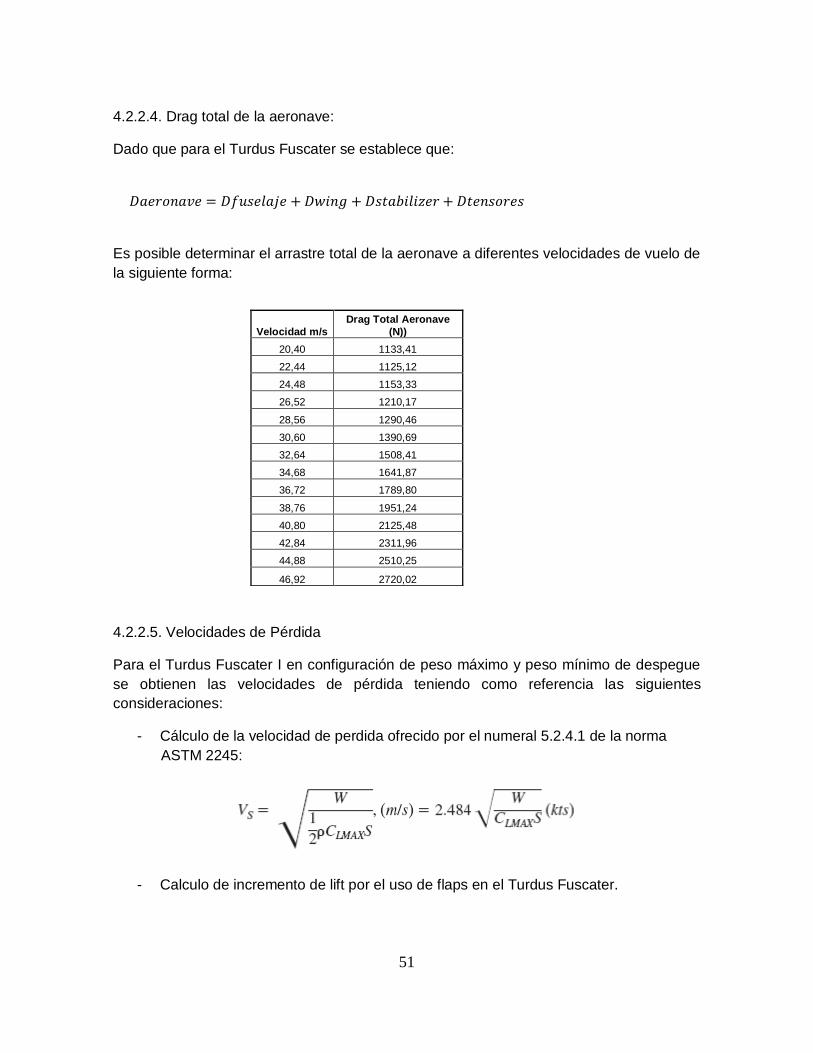
4.2.2.4. Drag total de la aeronave:
Dado que para el Turdus Fuscater se establece que:
𝐷𝑎𝑒𝑟𝑜𝑛𝑎𝑣𝑒 = 𝐷𝑓𝑢𝑠𝑒𝑙𝑎𝑗𝑒 + 𝐷𝑤𝑖𝑛𝑔 + 𝐷𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑒𝑟 + 𝐷𝑡𝑒𝑛𝑠𝑜𝑟𝑒𝑠
Es posible determinar el arrastre total de la aeronave a diferentes velocidades de vuelo de
la siguiente forma:
4.2.2.5. Velocidades de Pérdida
Para el Turdus Fuscater I en configuración de peso máximo y peso mínimo de despegue
se obtienen las velocidades de pérdida teniendo como referencia las siguientes
consideraciones:
- Cálculo de la velocidad de perdida ofrecido por el numeral 5.2.4.1 de la norma
ASTM 2245:
- Calculo de incremento de lift por el uso de flaps en el Turdus Fuscater.
Velocidad m/s
Drag Total Aeronave
(N))
20,40 1133,41
22,44 1125,12
24,48 1153,33
26,52 1210,17
28,56 1290,46
30,60 1390,69
32,64 1508,41
34,68 1641,87
36,72 1789,80
38,76 1951,24
40,80 2125,48
42,84 2311,96
44,88 2510,25
46,92 2720,02

52
El Turdus Fuscater viene equipado con flaps planos, los cuales ofrecen un aumento
en el coeficiente de lift de 0,47
Asimismo calculando el porcentaje de área alar que usa flaps, se obtienen los
resultados mostrados en la siguiente tabla:
Calculos de flaps Valor Observaciones
Longitud del ala sin fuselaje 9,538 m
Tipo de Flap Flap Plano
Incremento en el CL por flaps 0,4
Longitud de cada flap (m) 2 m
Cuerda alar en la ubicación de los flaps 1,25
Área total con flaps 5 m2
Porcentaje de Área con Flaps 0,39
Porcentaje de Área sin Flaps 0,61
Coeficiente de Lift Promedio al Aterrizaje 1,78
Coeficiente de Lift Promedio al Despegue 1,70
Se considera que para despegue solo se obtiene el 50% de
aumento de lift por los flaps
Teniendo entonces la variación en el coeficiente de lift debido al uso de flaps, y los pesos
máximo y minimo operativos ASTM 2245 obtenidos del peso & balance y modelamiento
de la aeronave, se pueden obtener las siguientes velocidades de perdida para el Turdus
Fuscater I.
Velocidades de Perdida
(Peso Máximo de Despegue MTOW) Valor Unidades
Velocidad de Perdida sin flaps
20,41 m/s
40,01 knots
Velocidad de Perdida al despegue (1/2 flaps)
19,93 m/s
39,08 knots
Velocidad de Perdida al Aterrizaje (Full flaps)
19,48 m/s
38,20 knots
(Peso Mínimo de Despegue ASTM 2245)
Velocidad de Perdida sin flaps
17,57 m/s
34,44 Knots
Velocidad de Perdida al despegue (1/2 flaps)
17,15 m/s
33,64 Knots
Velocidad de Perdida al Aterrizaje (Full flaps)
16,77 m/s
32,89 Knots
7 Airplane Design Jan Roskam Part III Capitulo 4 - Pg 209
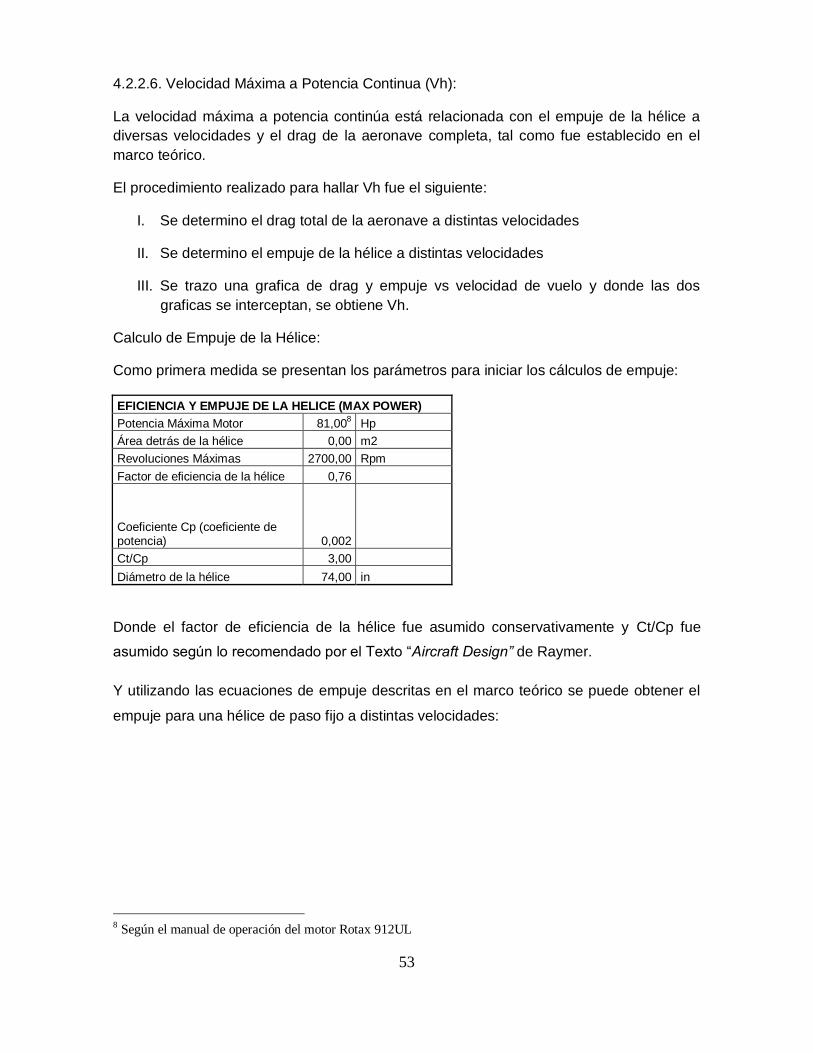
53
4.2.2.6. Velocidad Máxima a Potencia Continua (Vh):
La velocidad máxima a potencia continúa está relacionada con el empuje de la hélice a
diversas velocidades y el drag de la aeronave completa, tal como fue establecido en el
marco teórico.
El procedimiento realizado para hallar Vh fue el siguiente:
I. Se determino el drag total de la aeronave a distintas velocidades
II. Se determino el empuje de la hélice a distintas velocidades
III. Se trazo una grafica de drag y empuje vs velocidad de vuelo y donde las dos
graficas se interceptan, se obtiene Vh.
Calculo de Empuje de la Hélice:
Como primera medida se presentan los parámetros para iniciar los cálculos de empuje:
EFICIENCIA Y EMPUJE DE LA HELICE (MAX POWER)
Potencia Máxima Motor 81,008 Hp
Área detrás de la hélice 0,00 m2
Revoluciones Máximas 2700,00 Rpm
Factor de eficiencia de la hélice 0,76
Coeficiente Cp (coeficiente de potencia) 0,002
Ct/Cp 3,00 Diámetro de la hélice 74,00 in
Donde el factor de eficiencia de la hélice fue asumido conservativamente y Ct/Cp fue
asumido según lo recomendado por el Texto ―Aircraft Design” de Raymer.
Y utilizando las ecuaciones de empuje descritas en el marco teórico se puede obtener el
empuje para una hélice de paso fijo a distintas velocidades:
8 Según el manual de operación del motor Rotax 912UL

54
EMPUJE PARA UNA HÉLICE DE PASO FIJO A DISTINTAS VELOCIDADES
Velocidad (knots) J
J corregido /J diseño Empuje Libs* Empuje (N)
0,00 0,00 357,97 1589,38
40,00 0,24 0,24 357,97 1589,38
44,00 0,27 0,27 357,97 1589,38
48,00 0,29 0,29 357,97 1589,38
52,00 0,32 0,32 385,50 1711,64
56,00 0,34 0,34 357,97 1589,38
60,00 0,37 0,37 334,10 1483,42
64,00 0,39 0,39 313,22 1390,70
68,00 0,41 0,41 294,80 1308,90
72,00 0,44 0,44 278,42 1236,18
76,00 0,46 0,46 263,77 1171,12
80,00 0,49 0,49 250,58 1112,56
84,00 0,51 0,51 238,65 1059,58
88,00 0,54 0,54 227,80 1011,42
92,00 0,56 0,56 217,89 967,45
Grafico No.1. Drag y Empuje de la aeronave Turdus Fuscater a Nivel del mar. Fuente: Autor
0,00
500,00
1000,00
1500,00
2000,00
2500,00
3000,00
Fuer
za d
e Em
pu
je/
Dra
g (N
)
Drag & Empuje vs Velocidad (en nudos "Knots")
Drag
Thrust
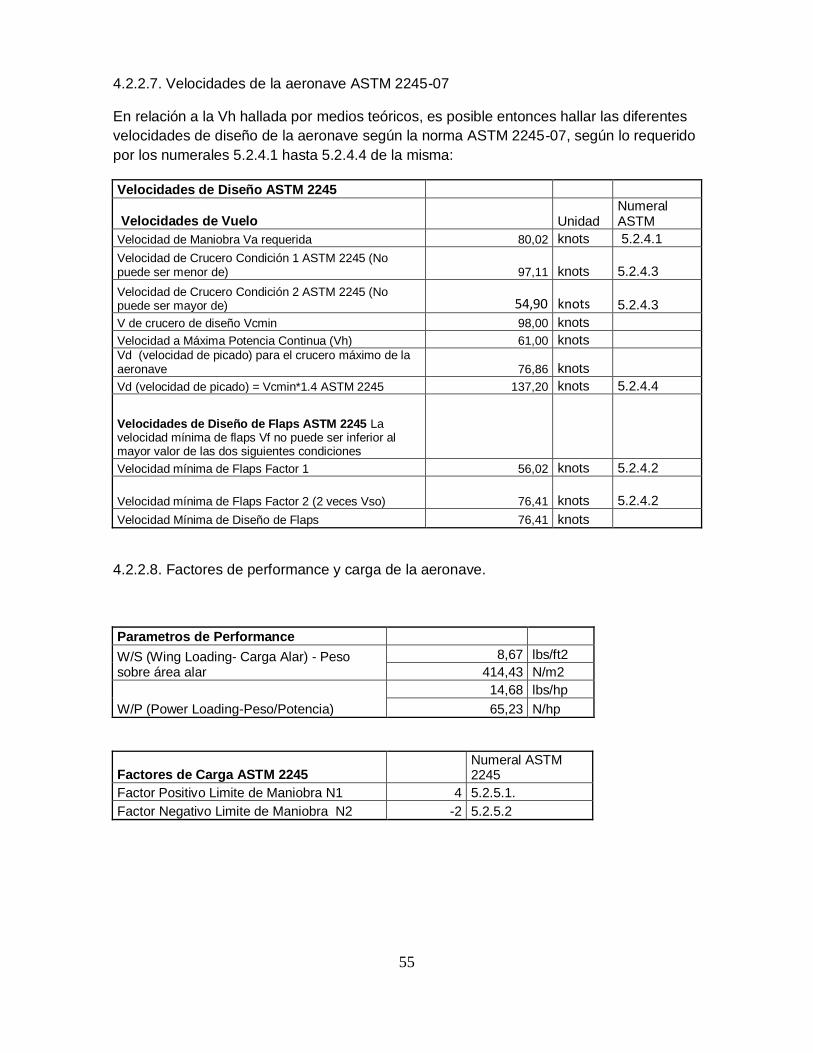
55
4.2.2.7. Velocidades de la aeronave ASTM 2245-07
En relación a la Vh hallada por medios teóricos, es posible entonces hallar las diferentes
velocidades de diseño de la aeronave según la norma ASTM 2245-07, según lo requerido
por los numerales 5.2.4.1 hasta 5.2.4.4 de la misma:
Velocidades de Diseño ASTM 2245
Velocidades de Vuelo Unidad Numeral ASTM
Velocidad de Maniobra Va requerida 80,02 knots 5.2.4.1
Velocidad de Crucero Condición 1 ASTM 2245 (No puede ser menor de) 97,11 knots 5.2.4.3
Velocidad de Crucero Condición 2 ASTM 2245 (No puede ser mayor de) 54,90 knots 5.2.4.3
V de crucero de diseño Vcmin 98,00 knots
Velocidad a Máxima Potencia Continua (Vh) 61,00 knots Vd (velocidad de picado) para el crucero máximo de la aeronave 76,86 knots
Vd (velocidad de picado) = Vcmin*1.4 ASTM 2245 137,20 knots 5.2.4.4
Velocidades de Diseño de Flaps ASTM 2245 La velocidad mínima de flaps Vf no puede ser inferior al mayor valor de las dos siguientes condiciones
Velocidad mínima de Flaps Factor 1 56,02 knots 5.2.4.2
Velocidad mínima de Flaps Factor 2 (2 veces Vso) 76,41 knots 5.2.4.2
Velocidad Mínima de Diseño de Flaps 76,41 knots
4.2.2.8. Factores de performance y carga de la aeronave.
Parametros de Performance
W/S (Wing Loading- Carga Alar) - Peso sobre área alar
8,67 lbs/ft2
414,43 N/m2
W/P (Power Loading-Peso/Potencia)
14,68 lbs/hp
65,23 N/hp
Factores de Carga ASTM 2245 Numeral ASTM 2245
Factor Positivo Limite de Maniobra N1 4 5.2.5.1.
Factor Negativo Limite de Maniobra N2 -2 5.2.5.2

56
4.2.2.9. Parámetros de Despegue
En referencia con la teoría suministrada en el marco teórico/conceptual de esta
investigación, se presenta el siguiente desarrollo siguiendo la metodología establecida:
Fuente : Aircraft Design- Daniel P. Raymer
Item Valor Unidades Comentarios
Velocidad de Perdida en Configuración de Despegue 19,93 m/s
Velocidad de Despegue 22,9182457 m/s
1,15 veces Vperdida
Coeficiente " μ" de Fricción en tierra 0,05 Pista en concreto / asfalto seco
Coeficiente Kt 0,250487374 N/N
Coeficiente Ka -0,00028583
Distancia estimada de despegue en tierra (Ground Run) 163,1032447 metros
Factor Tav (Raymer) 355,4433802
Distancia Transición
Altura Obstaculo 50 ft
Valor de transición R 833,7212657
Factor Sinγ ascenso 0,0863762
Distancia Transicion
72,01367464 ft
22,50427332 m
Hrt (altitud ganada durante transición) 3,115956575 ft
Distancia hasta obstaculo 540,7602873 ft
Distancia Total de despegue sobre obstáculo
1134,704345 ft
354,5951078 m
4.2.2.10. Parámetros de Aterrizaje.
De la misma forma, se presenta el siguiente desarrollo para los cálculos de aterrizaje de la
aeronave:

57
Fuente : Aircraft Design- Daniel P. Raymer
DISTANCIA DE ATERRIZAJE
Item valor Unidades Comentarios
Velocidad de Perdida en Configuración de Aterrizaje 19,48 m/s
Velocidad de Touchdown 22,41 m/s
1,15 veces Vperdida
Factor Sinγ descenso -0,21
Valor de transición R 796,92 Unidades en sistema ingles
Hrt (altitud perdida durante transición) 18,59 ft
Distancia recorrida durante Transicion
171,11 ft
53,47 m
Distancia recorrida desde obstaculo 50ft hasta transicion 142,90 ft Numeral 4.4.4.1
Altura Obstaculo 50,00 ft
Coeficiente " μ" de Fricción en tierra + frenos encendidos 0,30
Pista en concreto / asfalto seco.
Tiempo de respuesta frenado 2,00 segundos Mientras el piloto decide frenar
Distancia recorrida mientras se frena la aeronave
44,81 m
143,40 ft
Distancia recorrida desde frenado hasta detención de la aeronave
Coeficiente Kt 0,30 N/N
Coeficiente Ka -0,00029
Distancia estimada de corrida en tierra (Ground Run) 116,04 metros
Distancia Total de aterrizaje sobre obstaculo de 50ft
828,74 ft
258,98 m
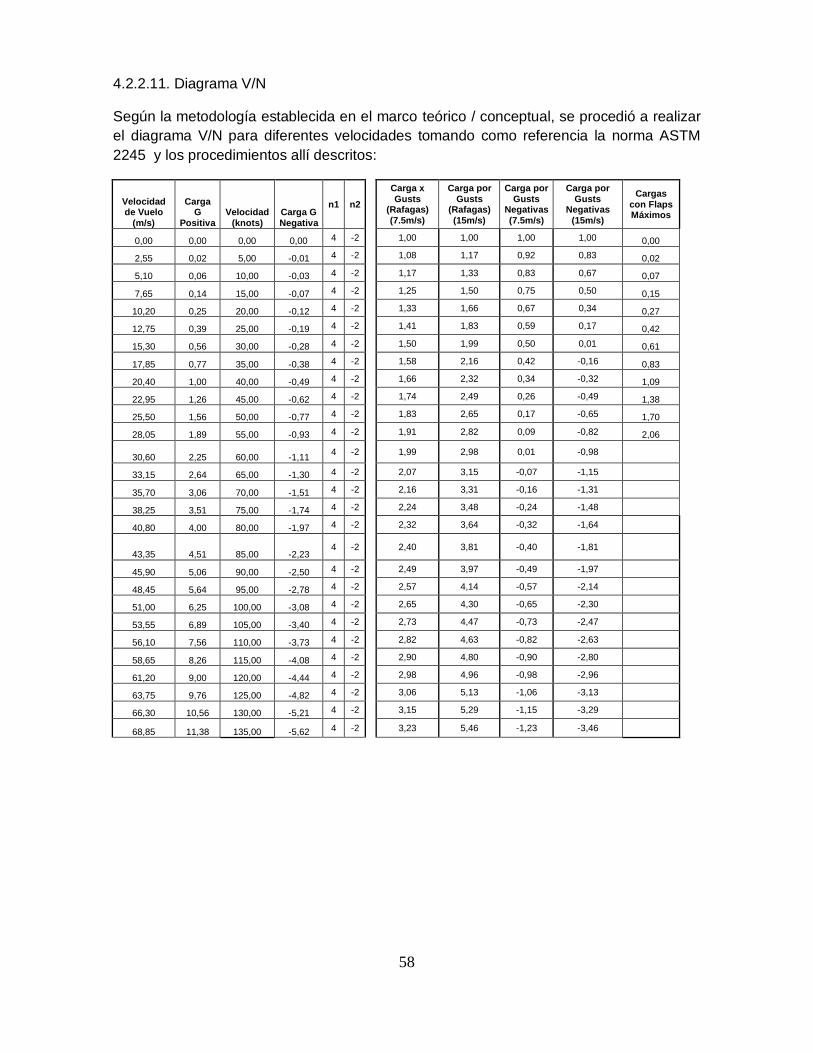
58
4.2.2.11. Diagrama V/N
Según la metodología establecida en el marco teórico / conceptual, se procedió a realizar
el diagrama V/N para diferentes velocidades tomando como referencia la norma ASTM
2245 y los procedimientos allí descritos:
Velocidad de Vuelo
(m/s)
Carga G
Positiva Velocidad
(knots) Carga G Negativa
n1 n2
Carga x Gusts
(Rafagas) (7.5m/s)
Carga por Gusts
(Rafagas) (15m/s)
Carga por Gusts
Negativas (7.5m/s)
Carga por Gusts
Negativas (15m/s)
Cargas con Flaps Máximos
0,00 0,00 0,00 0,00 4 -2
1,00 1,00 1,00 1,00 0,00
2,55 0,02 5,00 -0,01 4 -2
1,08 1,17 0,92 0,83 0,02
5,10 0,06 10,00 -0,03 4 -2
1,17 1,33 0,83 0,67 0,07
7,65 0,14 15,00 -0,07 4 -2
1,25 1,50 0,75 0,50 0,15
10,20 0,25 20,00 -0,12 4 -2
1,33 1,66 0,67 0,34 0,27
12,75 0,39 25,00 -0,19 4 -2
1,41 1,83 0,59 0,17 0,42
15,30 0,56 30,00 -0,28 4 -2
1,50 1,99 0,50 0,01 0,61
17,85 0,77 35,00 -0,38 4 -2
1,58 2,16 0,42 -0,16 0,83
20,40 1,00 40,00 -0,49 4 -2
1,66 2,32 0,34 -0,32 1,09
22,95 1,26 45,00 -0,62 4 -2
1,74 2,49 0,26 -0,49 1,38
25,50 1,56 50,00 -0,77 4 -2
1,83 2,65 0,17 -0,65 1,70
28,05 1,89 55,00 -0,93 4 -2
1,91 2,82 0,09 -0,82 2,06
30,60 2,25 60,00 -1,11 4 -2
1,99 2,98 0,01 -0,98
33,15 2,64 65,00 -1,30 4 -2
2,07 3,15 -0,07 -1,15
35,70 3,06 70,00 -1,51 4 -2
2,16 3,31 -0,16 -1,31
38,25 3,51 75,00 -1,74 4 -2
2,24 3,48 -0,24 -1,48
40,80 4,00 80,00 -1,97 4 -2
2,32 3,64 -0,32 -1,64
43,35 4,51 85,00 -2,23 4 -2
2,40 3,81 -0,40 -1,81
45,90 5,06 90,00 -2,50 4 -2
2,49 3,97 -0,49 -1,97
48,45 5,64 95,00 -2,78 4 -2
2,57 4,14 -0,57 -2,14
51,00 6,25 100,00 -3,08 4 -2
2,65 4,30 -0,65 -2,30
53,55 6,89 105,00 -3,40 4 -2
2,73 4,47 -0,73 -2,47
56,10 7,56 110,00 -3,73 4 -2
2,82 4,63 -0,82 -2,63
58,65 8,26 115,00 -4,08 4 -2
2,90 4,80 -0,90 -2,80
61,20 9,00 120,00 -4,44 4 -2
2,98 4,96 -0,98 -2,96
63,75 9,76 125,00 -4,82 4 -2
3,06 5,13 -1,06 -3,13
66,30 10,56 130,00 -5,21 4 -2
3,15 5,29 -1,15 -3,29
68,85 11,38 135,00 -5,62 4 -2
3,23 5,46 -1,23 -3,46
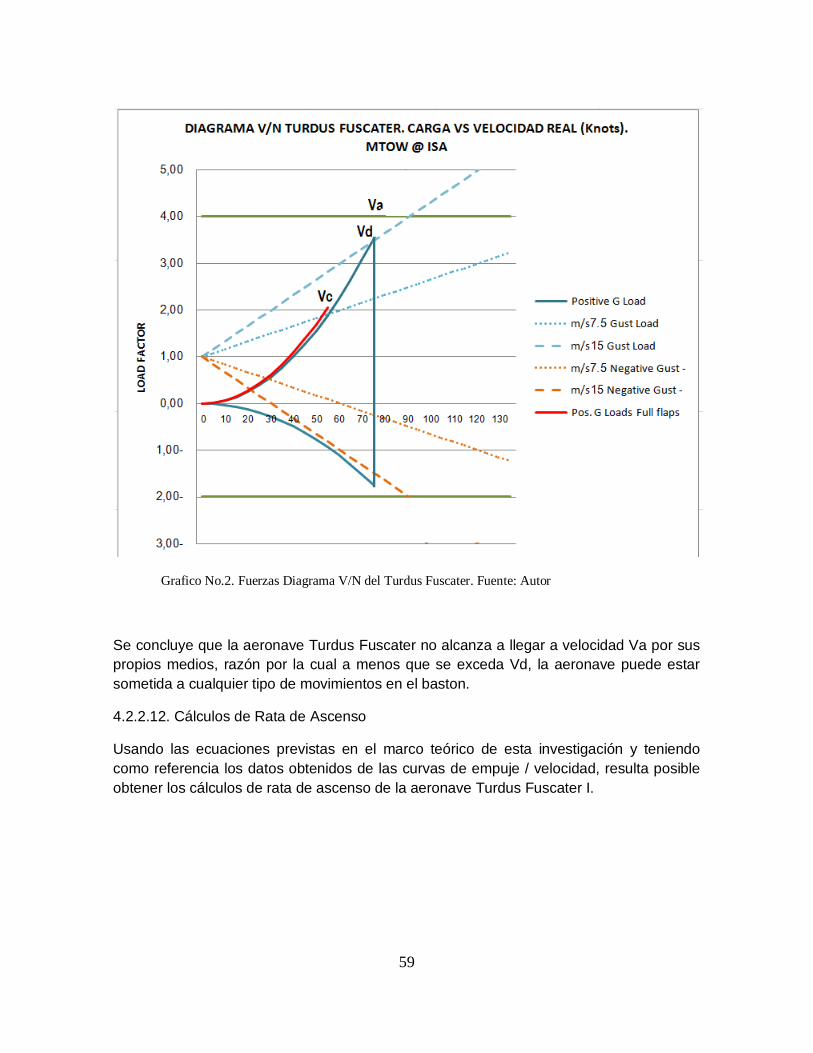
59
Grafico No.2. Fuerzas Diagrama V/N del Turdus Fuscater. Fuente: Autor
Se concluye que la aeronave Turdus Fuscater no alcanza a llegar a velocidad Va por sus
propios medios, razón por la cual a menos que se exceda Vd, la aeronave puede estar
sometida a cualquier tipo de movimientos en el baston.
4.2.2.12. Cálculos de Rata de Ascenso
Usando las ecuaciones previstas en el marco teórico de esta investigación y teniendo
como referencia los datos obtenidos de las curvas de empuje / velocidad, resulta posible
obtener los cálculos de rata de ascenso de la aeronave Turdus Fuscater I.
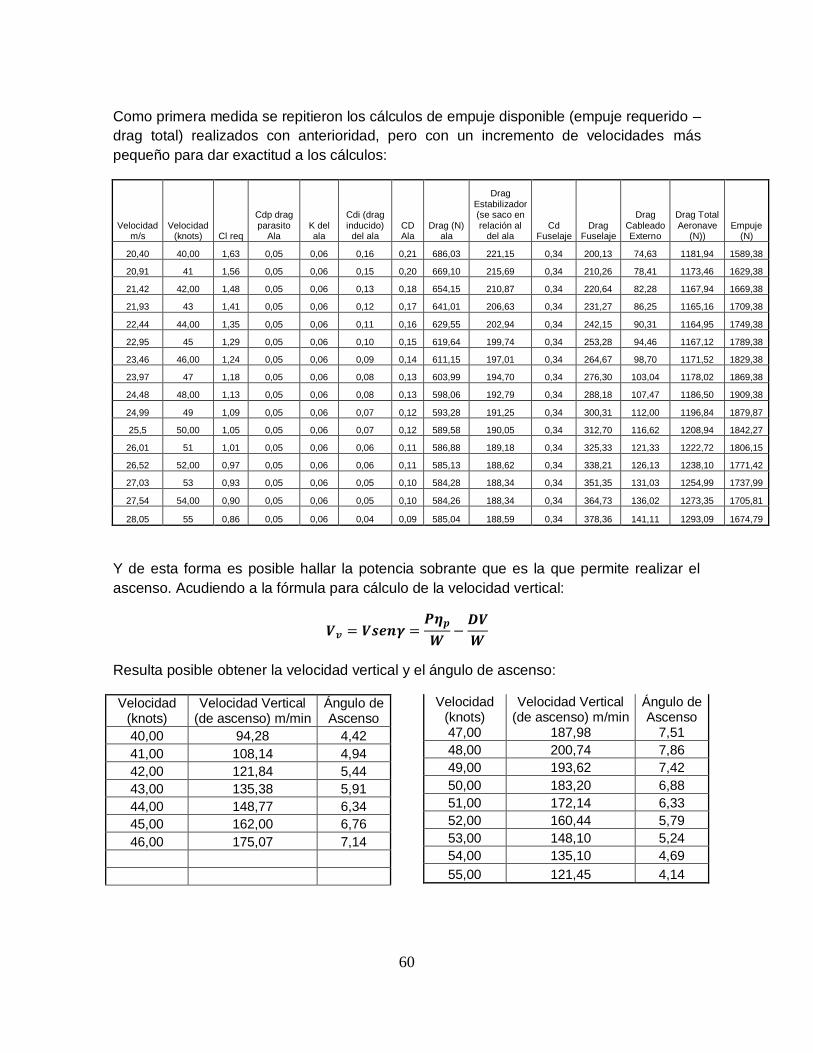
60
Como primera medida se repitieron los cálculos de empuje disponible (empuje requerido –
drag total) realizados con anterioridad, pero con un incremento de velocidades más
pequeño para dar exactitud a los cálculos:
Velocidad m/s
Velocidad (knots) Cl req
Cdp drag parasito
Ala K del ala
Cdi (drag inducido)
del ala CD Ala
Drag (N) ala
Drag Estabilizador (se saco en relación al
del ala Cd
Fuselaje Drag
Fuselaje
Drag Cableado Externo
Drag Total Aeronave
(N)) Empuje
(N)
20,40 40,00 1,63 0,05 0,06 0,16 0,21 686,03 221,15 0,34 200,13 74,63 1181,94 1589,38
20,91 41 1,56 0,05 0,06 0,15 0,20 669,10 215,69 0,34 210,26 78,41 1173,46 1629,38
21,42 42,00 1,48 0,05 0,06 0,13 0,18 654,15 210,87 0,34 220,64 82,28 1167,94 1669,38
21,93 43 1,41 0,05 0,06 0,12 0,17 641,01 206,63 0,34 231,27 86,25 1165,16 1709,38
22,44 44,00 1,35 0,05 0,06 0,11 0,16 629,55 202,94 0,34 242,15 90,31 1164,95 1749,38
22,95 45 1,29 0,05 0,06 0,10 0,15 619,64 199,74 0,34 253,28 94,46 1167,12 1789,38
23,46 46,00 1,24 0,05 0,06 0,09 0,14 611,15 197,01 0,34 264,67 98,70 1171,52 1829,38
23,97 47 1,18 0,05 0,06 0,08 0,13 603,99 194,70 0,34 276,30 103,04 1178,02 1869,38
24,48 48,00 1,13 0,05 0,06 0,08 0,13 598,06 192,79 0,34 288,18 107,47 1186,50 1909,38
24,99 49 1,09 0,05 0,06 0,07 0,12 593,28 191,25 0,34 300,31 112,00 1196,84 1879,87
25,5 50,00 1,05 0,05 0,06 0,07 0,12 589,58 190,05 0,34 312,70 116,62 1208,94 1842,27
26,01 51 1,01 0,05 0,06 0,06 0,11 586,88 189,18 0,34 325,33 121,33 1222,72 1806,15
26,52 52,00 0,97 0,05 0,06 0,06 0,11 585,13 188,62 0,34 338,21 126,13 1238,10 1771,42
27,03 53 0,93 0,05 0,06 0,05 0,10 584,28 188,34 0,34 351,35 131,03 1254,99 1737,99
27,54 54,00 0,90 0,05 0,06 0,05 0,10 584,26 188,34 0,34 364,73 136,02 1273,35 1705,81
28,05 55 0,86 0,05 0,06 0,04 0,09 585,04 188,59 0,34 378,36 141,11 1293,09 1674,79
Y de esta forma es posible hallar la potencia sobrante que es la que permite realizar el
ascenso. Acudiendo a la fórmula para cálculo de la velocidad vertical:
𝑽𝒗 = 𝑽𝒔𝒆𝒏𝜸 =𝑷𝜼𝒑
𝑾−
𝑫𝑽
𝑾
Resulta posible obtener la velocidad vertical y el ángulo de ascenso:
Velocidad (knots)
Velocidad Vertical (de ascenso) m/min
Ángulo de Ascenso
40,00 94,28 4,42
41,00 108,14 4,94
42,00 121,84 5,44
43,00 135,38 5,91
44,00 148,77 6,34
45,00 162,00 6,76
46,00 175,07 7,14
Velocidad (knots) 47,00
Velocidad Vertical (de ascenso) m/min
187,98
Ángulo de Ascenso
7,51
48,00 200,74 7,86
49,00 193,62 7,42
50,00 183,20 6,88
51,00 172,14 6,33
52,00 160,44 5,79
53,00 148,10 5,24
54,00 135,10 4,69
55,00 121,45 4,14
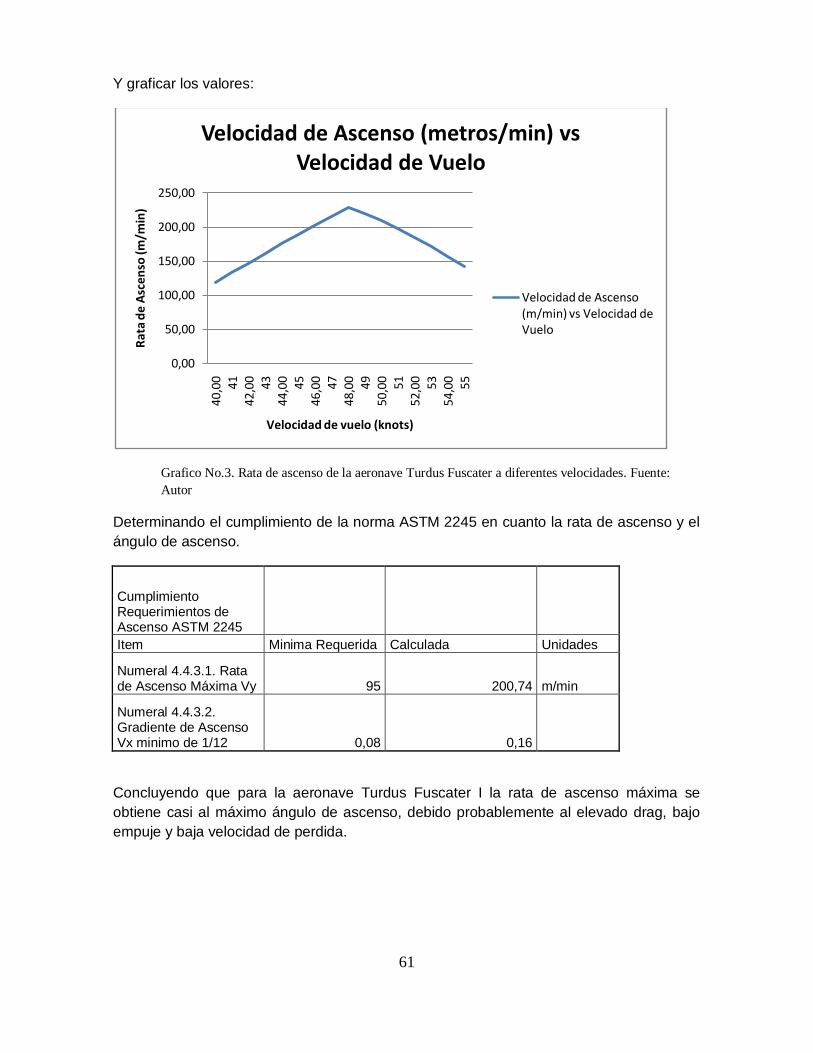
61
Y graficar los valores:
Grafico No.3. Rata de ascenso de la aeronave Turdus Fuscater a diferentes velocidades. Fuente:
Autor
Determinando el cumplimiento de la norma ASTM 2245 en cuanto la rata de ascenso y el
ángulo de ascenso.
Cumplimiento Requerimientos de Ascenso ASTM 2245
Item Minima Requerida Calculada Unidades
Numeral 4.4.3.1. Rata de Ascenso Máxima Vy 95 200,74 m/min
Numeral 4.4.3.2. Gradiente de Ascenso Vx minimo de 1/12 0,08 0,16
Concluyendo que para la aeronave Turdus Fuscater I la rata de ascenso máxima se
obtiene casi al máximo ángulo de ascenso, debido probablemente al elevado drag, bajo
empuje y baja velocidad de perdida.
0,00
50,00
100,00
150,00
200,00
250,00
40,0
0 4142
,00 43
44,0
0 4546
,00 47
48,0
0 4950
,00 51
52,0
0 5354
,00 55
Rat
a d
e A
sce
nso
(m/m
in)
Velocidad de vuelo (knots)
Velocidad de Ascenso (metros/min) vs Velocidad de Vuelo
Velocidad de Ascenso (m/min) vs Velocidad de Vuelo
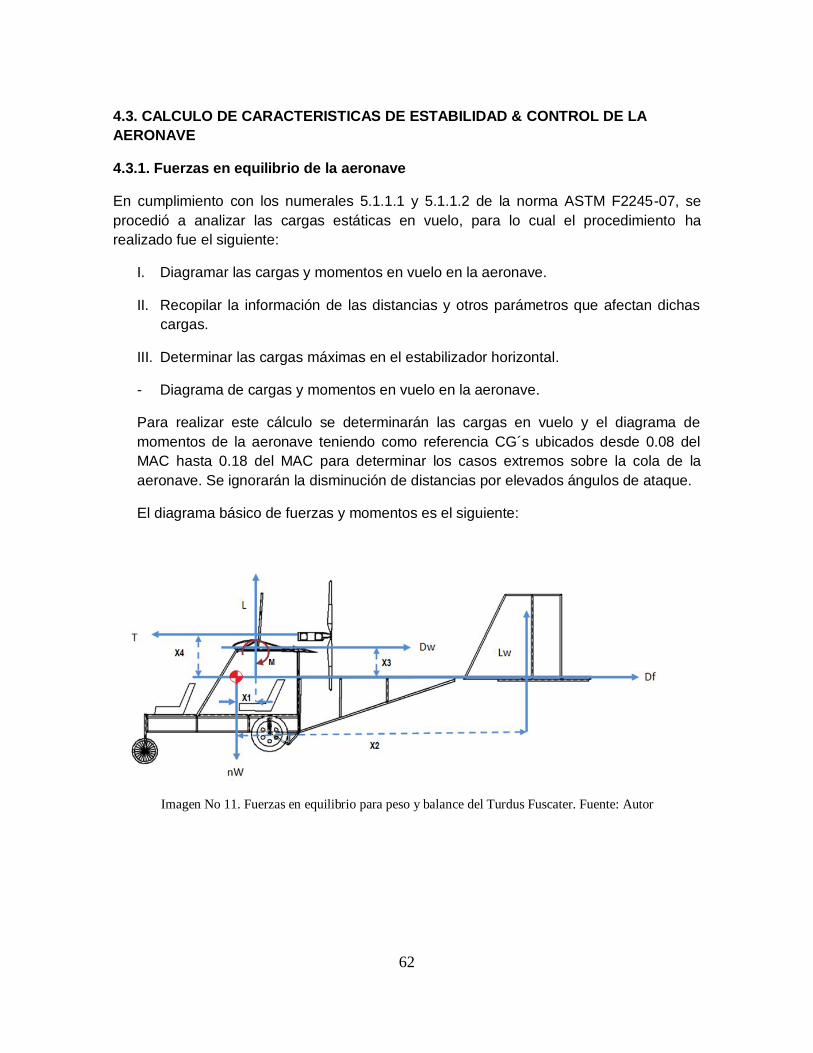
62
4.3. CALCULO DE CARACTERISTICAS DE ESTABILIDAD & CONTROL DE LA
AERONAVE
4.3.1. Fuerzas en equilibrio de la aeronave
En cumplimiento con los numerales 5.1.1.1 y 5.1.1.2 de la norma ASTM F2245-07, se
procedió a analizar las cargas estáticas en vuelo, para lo cual el procedimiento ha
realizado fue el siguiente:
I. Diagramar las cargas y momentos en vuelo en la aeronave.
II. Recopilar la información de las distancias y otros parámetros que afectan dichas
cargas.
III. Determinar las cargas máximas en el estabilizador horizontal.
- Diagrama de cargas y momentos en vuelo en la aeronave.
Para realizar este cálculo se determinarán las cargas en vuelo y el diagrama de
momentos de la aeronave teniendo como referencia CG´s ubicados desde 0.08 del
MAC hasta 0.18 del MAC para determinar los casos extremos sobre la cola de la
aeronave. Se ignorarán la disminución de distancias por elevados ángulos de ataque.
El diagrama básico de fuerzas y momentos es el siguiente:
Imagen No 11. Fuerzas en equilibrio para peso y balance del Turdus Fuscater. Fuente: Autor
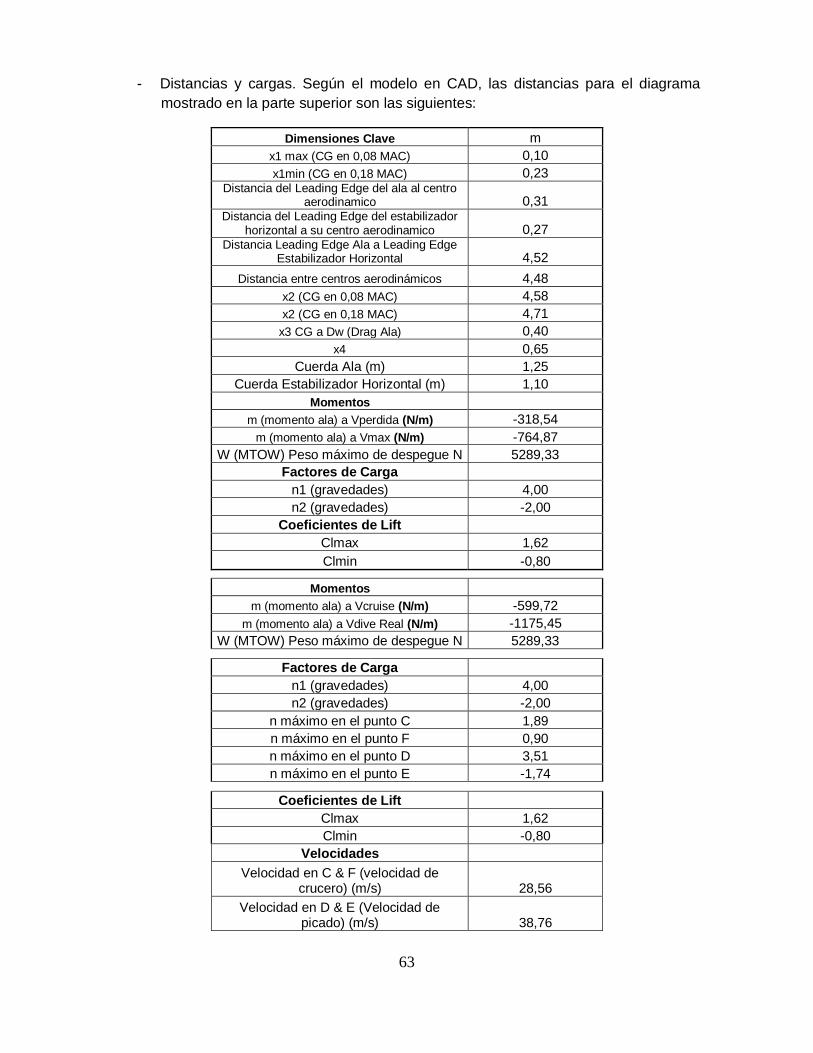
63
- Distancias y cargas. Según el modelo en CAD, las distancias para el diagrama
mostrado en la parte superior son las siguientes:
Dimensiones Clave m
x1 max (CG en 0,08 MAC) 0,10
x1min (CG en 0,18 MAC) 0,23 Distancia del Leading Edge del ala al centro
aerodinamico 0,31 Distancia del Leading Edge del estabilizador
horizontal a su centro aerodinamico 0,27 Distancia Leading Edge Ala a Leading Edge
Estabilizador Horizontal 4,52
Distancia entre centros aerodinámicos 4,48
x2 (CG en 0,08 MAC) 4,58
x2 (CG en 0,18 MAC) 4,71
x3 CG a Dw (Drag Ala) 0,40
x4 0,65
Cuerda Ala (m) 1,25
Cuerda Estabilizador Horizontal (m) 1,10
Momentos
m (momento ala) a Vperdida (N/m) -318,54
m (momento ala) a Vmax (N/m) -764,87
W (MTOW) Peso máximo de despegue N 5289,33
Factores de Carga n1 (gravedades) 4,00
n2 (gravedades) -2,00
Coeficientes de Lift Clmax 1,62
Clmin -0,80
Momentos
m (momento ala) a Vcruise (N/m) -599,72
m (momento ala) a Vdive Real (N/m) -1175,45
W (MTOW) Peso máximo de despegue N 5289,33
Factores de Carga n1 (gravedades) 4,00
n2 (gravedades) -2,00
n máximo en el punto C 1,89
n máximo en el punto F 0,90
n máximo en el punto D 3,51
n máximo en el punto E -1,74
Coeficientes de Lift
Clmax 1,62
Clmin -0,80
Velocidades
Velocidad en C & F (velocidad de crucero) (m/s) 28,56
Velocidad en D & E (Velocidad de picado) (m/s) 38,76
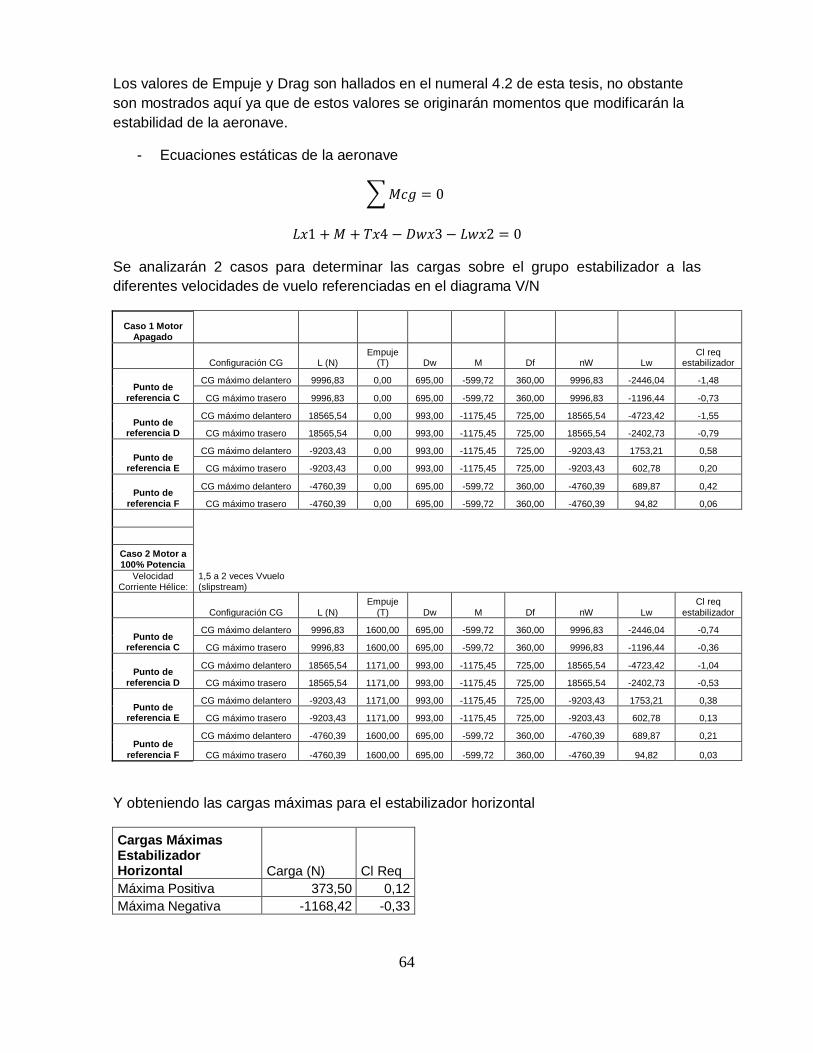
64
Los valores de Empuje y Drag son hallados en el numeral 4.2 de esta tesis, no obstante
son mostrados aquí ya que de estos valores se originarán momentos que modificarán la
estabilidad de la aeronave.
- Ecuaciones estáticas de la aeronave
𝑀𝑐𝑔 = 0
𝐿𝑥1 + 𝑀 + 𝑇𝑥4 − 𝐷𝑤𝑥3 − 𝐿𝑤𝑥2 = 0
Se analizarán 2 casos para determinar las cargas sobre el grupo estabilizador a las
diferentes velocidades de vuelo referenciadas en el diagrama V/N
Caso 1 Motor Apagado
Configuración CG L (N) Empuje
(T) Dw M Df nW Lw Cl req
estabilizador
Punto de referencia C
CG máximo delantero 9996,83 0,00 695,00 -599,72 360,00 9996,83 -2446,04 -1,48
CG máximo trasero 9996,83 0,00 695,00 -599,72 360,00 9996,83 -1196,44 -0,73
Punto de referencia D
CG máximo delantero 18565,54 0,00 993,00 -1175,45 725,00 18565,54 -4723,42 -1,55
CG máximo trasero 18565,54 0,00 993,00 -1175,45 725,00 18565,54 -2402,73 -0,79
Punto de referencia E
CG máximo delantero -9203,43 0,00 993,00 -1175,45 725,00 -9203,43 1753,21 0,58
CG máximo trasero -9203,43 0,00 993,00 -1175,45 725,00 -9203,43 602,78 0,20
Punto de
referencia F
CG máximo delantero -4760,39 0,00 695,00 -599,72 360,00 -4760,39 689,87 0,42
CG máximo trasero -4760,39 0,00 695,00 -599,72 360,00 -4760,39 94,82 0,06
Caso 2 Motor a 100% Potencia
Velocidad Corriente Hélice:
1,5 a 2 veces Vvuelo (slipstream)
Configuración CG L (N)
Empuje
(T) Dw M Df nW Lw
Cl req
estabilizador
Punto de referencia C
CG máximo delantero 9996,83 1600,00 695,00 -599,72 360,00 9996,83 -2446,04 -0,74
CG máximo trasero 9996,83 1600,00 695,00 -599,72 360,00 9996,83 -1196,44 -0,36
Punto de referencia D
CG máximo delantero 18565,54 1171,00 993,00 -1175,45 725,00 18565,54 -4723,42 -1,04
CG máximo trasero 18565,54 1171,00 993,00 -1175,45 725,00 18565,54 -2402,73 -0,53
Punto de referencia E
CG máximo delantero -9203,43 1171,00 993,00 -1175,45 725,00 -9203,43 1753,21 0,38
CG máximo trasero -9203,43 1171,00 993,00 -1175,45 725,00 -9203,43 602,78 0,13
Punto de referencia F
CG máximo delantero -4760,39 1600,00 695,00 -599,72 360,00 -4760,39 689,87 0,21
CG máximo trasero -4760,39 1600,00 695,00 -599,72 360,00 -4760,39 94,82 0,03
Y obteniendo las cargas máximas para el estabilizador horizontal
Cargas Máximas Estabilizador Horizontal Carga (N) Cl Req
Máxima Positiva 373,50 0,12
Máxima Negativa -1168,42 -0,33

65
4.3.2. Estabilidad Longitudinal
Partiendo de los resultados obtenidos para determinar las fuerzas de equilibrio de la
aeronave, resulta posible analizar el efecto de una perturbación longitudinal de la
aeronave a una diferente gama de velocidades de vuelo, determinando así el
comportamiento longitudinal de la aeronave frente a una perturbación y determinar si la
aeronave es estable estáticamente.
Los parámetros adicionales requeridos para estos cálculos están dados por los ángulos
de incidencia de las distintas superficies en relación al ángulo del fuselaje y el eje
longitudinal.
Incidencia del ala iW 0 grados
Incidencia cola iH 0 grados
Incidencia motor iP 0 grados
De la misma forma resulta necesario conocer las características aerodinámicas del
estabilizador horizontal, cuyo perfil aerodinámico es una superficie plana (Perfil NACA
0000), donde su sustentación a bajos ángulos de ataque está dada por9:
𝐶𝑙 = 2𝜋 ∗∝
Teniendo en cuenta que el ángulo α está en radianes.
Partiendo entonces de las condiciones iníciales de trim para vuelo recto y nivelado:
Velocidad (knots) Configuración CG L CL
Angulo Incidencia Aeronave
Empuje (T) Dw M (perfil)
Lw (para vuelo
nivelado) Cl req stab h
Momento resultante
61,00
CG máximo delantero 5289,33 0,70 2,30 1440,00 582,00 -740,39 -546,99 -0,14 0,00
CG máximo trasero 5289,33 0,70 2,30 1440,00 582,00 -740,39 -417,25 -0,11 0,00
40,00
CG máximo delantero 5289,33 1,62 13,08 1589,00 616,04065 -318,36 -546,99 -0,32 0,00
CG máximo trasero 5289,33 1,62 13,08 1589,00 0 -318,36 -343,10 -0,20 0,00
9 http://www.grc.nasa.gov/WWW/k-12/airplane/kiteincl.html
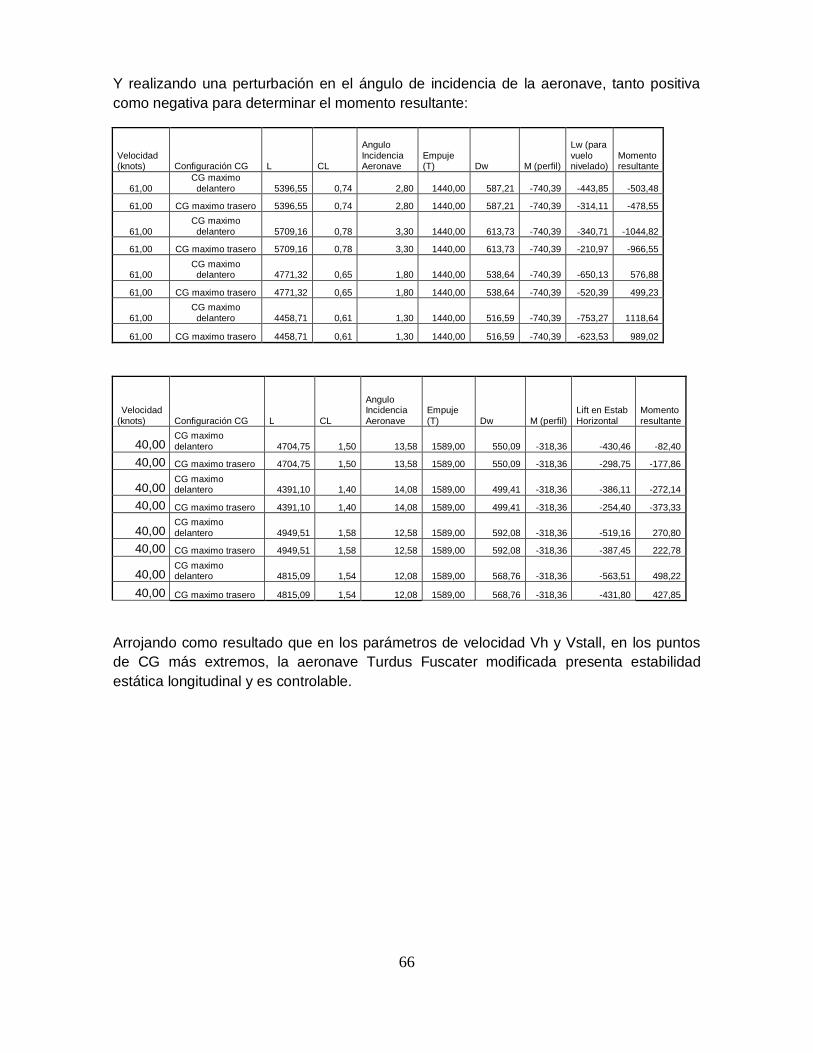
66
Y realizando una perturbación en el ángulo de incidencia de la aeronave, tanto positiva
como negativa para determinar el momento resultante:
Velocidad (knots) Configuración CG L CL
Angulo Incidencia Aeronave
Empuje (T) Dw M (perfil)
Lw (para vuelo nivelado)
Momento resultante
61,00 CG maximo delantero 5396,55 0,74 2,80 1440,00 587,21 -740,39 -443,85 -503,48
61,00 CG maximo trasero 5396,55 0,74 2,80 1440,00 587,21 -740,39 -314,11 -478,55
61,00 CG maximo delantero 5709,16 0,78 3,30 1440,00 613,73 -740,39 -340,71 -1044,82
61,00 CG maximo trasero 5709,16 0,78 3,30 1440,00 613,73 -740,39 -210,97 -966,55
61,00 CG maximo delantero 4771,32 0,65 1,80 1440,00 538,64 -740,39 -650,13 576,88
61,00 CG maximo trasero 4771,32 0,65 1,80 1440,00 538,64 -740,39 -520,39 499,23
61,00 CG maximo delantero 4458,71 0,61 1,30 1440,00 516,59 -740,39 -753,27 1118,64
61,00 CG maximo trasero 4458,71 0,61 1,30 1440,00 516,59 -740,39 -623,53 989,02
Velocidad (knots) Configuración CG L CL
Angulo Incidencia Aeronave
Empuje (T) Dw M (perfil)
Lift en Estab Horizontal
Momento resultante
40,00 CG maximo delantero 4704,75 1,50 13,58 1589,00 550,09 -318,36 -430,46 -82,40
40,00 CG maximo trasero 4704,75 1,50 13,58 1589,00 550,09 -318,36 -298,75 -177,86
40,00 CG maximo delantero 4391,10 1,40 14,08 1589,00 499,41 -318,36 -386,11 -272,14
40,00 CG maximo trasero 4391,10 1,40 14,08 1589,00 499,41 -318,36 -254,40 -373,33
40,00 CG maximo delantero 4949,51 1,58 12,58 1589,00 592,08 -318,36 -519,16 270,80
40,00 CG maximo trasero 4949,51 1,58 12,58 1589,00 592,08 -318,36 -387,45 222,78
40,00 CG maximo delantero 4815,09 1,54 12,08 1589,00 568,76 -318,36 -563,51 498,22
40,00 CG maximo trasero 4815,09 1,54 12,08 1589,00 568,76 -318,36 -431,80 427,85
Arrojando como resultado que en los parámetros de velocidad Vh y Vstall, en los puntos
de CG más extremos, la aeronave Turdus Fuscater modificada presenta estabilidad
estática longitudinal y es controlable.
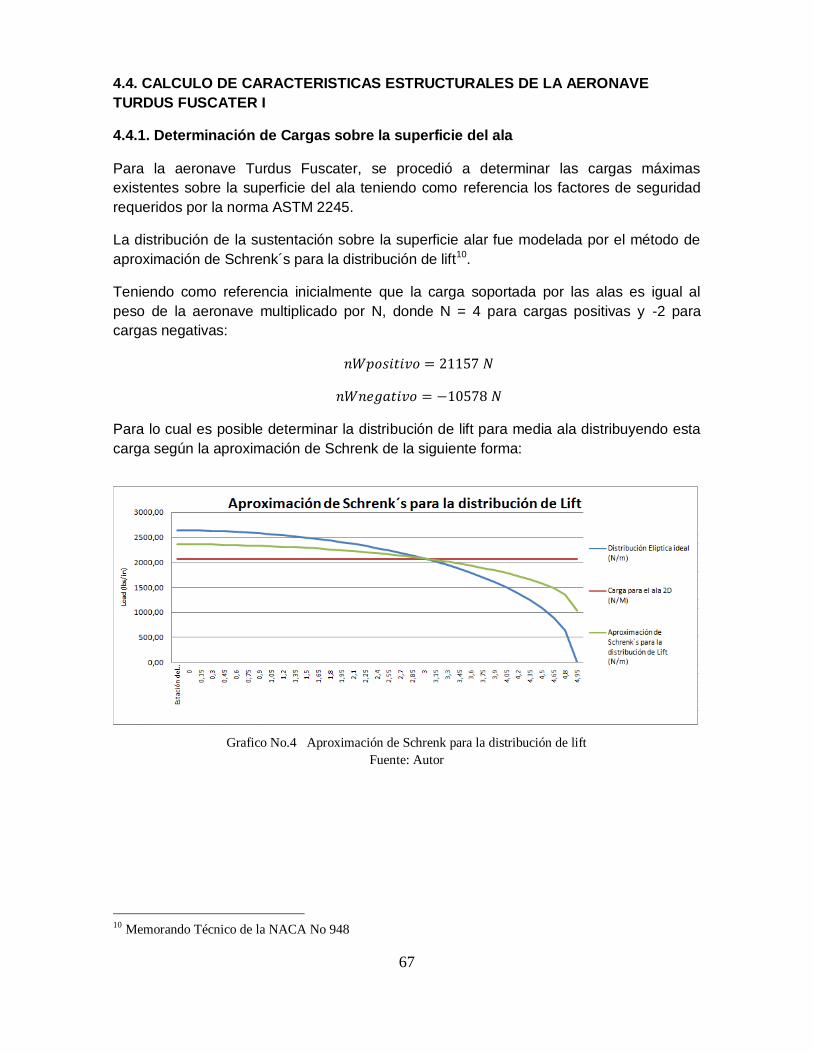
67
4.4. CALCULO DE CARACTERISTICAS ESTRUCTURALES DE LA AERONAVE
TURDUS FUSCATER I
4.4.1. Determinación de Cargas sobre la superficie del ala
Para la aeronave Turdus Fuscater, se procedió a determinar las cargas máximas
existentes sobre la superficie del ala teniendo como referencia los factores de seguridad
requeridos por la norma ASTM 2245.
La distribución de la sustentación sobre la superficie alar fue modelada por el método de
aproximación de Schrenk´s para la distribución de lift10.
Teniendo como referencia inicialmente que la carga soportada por las alas es igual al
peso de la aeronave multiplicado por N, donde N = 4 para cargas positivas y -2 para
cargas negativas:
𝑛𝑊𝑝𝑜𝑠𝑖𝑡𝑖𝑣𝑜 = 21157 𝑁
𝑛𝑊𝑛𝑒𝑔𝑎𝑡𝑖𝑣𝑜 = −10578 𝑁
Para lo cual es posible determinar la distribución de lift para media ala distribuyendo esta
carga según la aproximación de Schrenk de la siguiente forma:
10 Memorando Técnico de la NACA No 948
Grafico No.4 Aproximación de Schrenk para la distribución de lift
Fuente: Autor
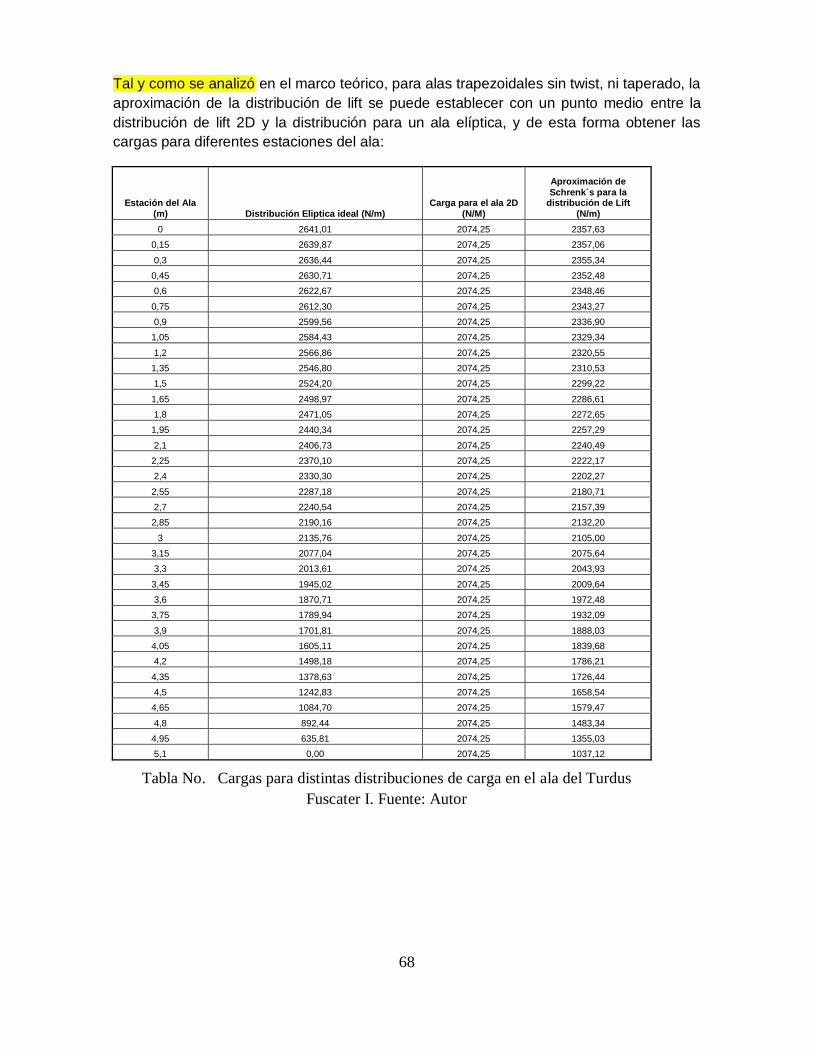
68
Tal y como se analizó en el marco teórico, para alas trapezoidales sin twist, ni taperado, la
aproximación de la distribución de lift se puede establecer con un punto medio entre la
distribución de lift 2D y la distribución para un ala elíptica, y de esta forma obtener las
cargas para diferentes estaciones del ala:
Estación del Ala (m) Distribución Eliptica ideal (N/m)
Carga para el ala 2D (N/M)
Aproximación de Schrenk´s para la
distribución de Lift (N/m)
0 2641,01 2074,25 2357,63
0,15 2639,87 2074,25 2357,06
0,3 2636,44 2074,25 2355,34
0,45 2630,71 2074,25 2352,48
0,6 2622,67 2074,25 2348,46
0,75 2612,30 2074,25 2343,27
0,9 2599,56 2074,25 2336,90
1,05 2584,43 2074,25 2329,34
1,2 2566,86 2074,25 2320,55
1,35 2546,80 2074,25 2310,53
1,5 2524,20 2074,25 2299,22
1,65 2498,97 2074,25 2286,61
1,8 2471,05 2074,25 2272,65
1,95 2440,34 2074,25 2257,29
2,1 2406,73 2074,25 2240,49
2,25 2370,10 2074,25 2222,17
2,4 2330,30 2074,25 2202,27
2,55 2287,18 2074,25 2180,71
2,7 2240,54 2074,25 2157,39
2,85 2190,16 2074,25 2132,20
3 2135,76 2074,25 2105,00
3,15 2077,04 2074,25 2075,64
3,3 2013,61 2074,25 2043,93
3,45 1945,02 2074,25 2009,64
3,6 1870,71 2074,25 1972,48
3,75 1789,94 2074,25 1932,09
3,9 1701,81 2074,25 1888,03
4,05 1605,11 2074,25 1839,68
4,2 1498,18 2074,25 1786,21
4,35 1378,63 2074,25 1726,44
4,5 1242,83 2074,25 1658,54
4,65 1084,70 2074,25 1579,47
4,8 892,44 2074,25 1483,34
4,95 635,81 2074,25 1355,03
5,1 0,00 2074,25 1037,12
Tabla No. Cargas para distintas distribuciones de carga en el ala del Turdus
Fuscater I. Fuente: Autor
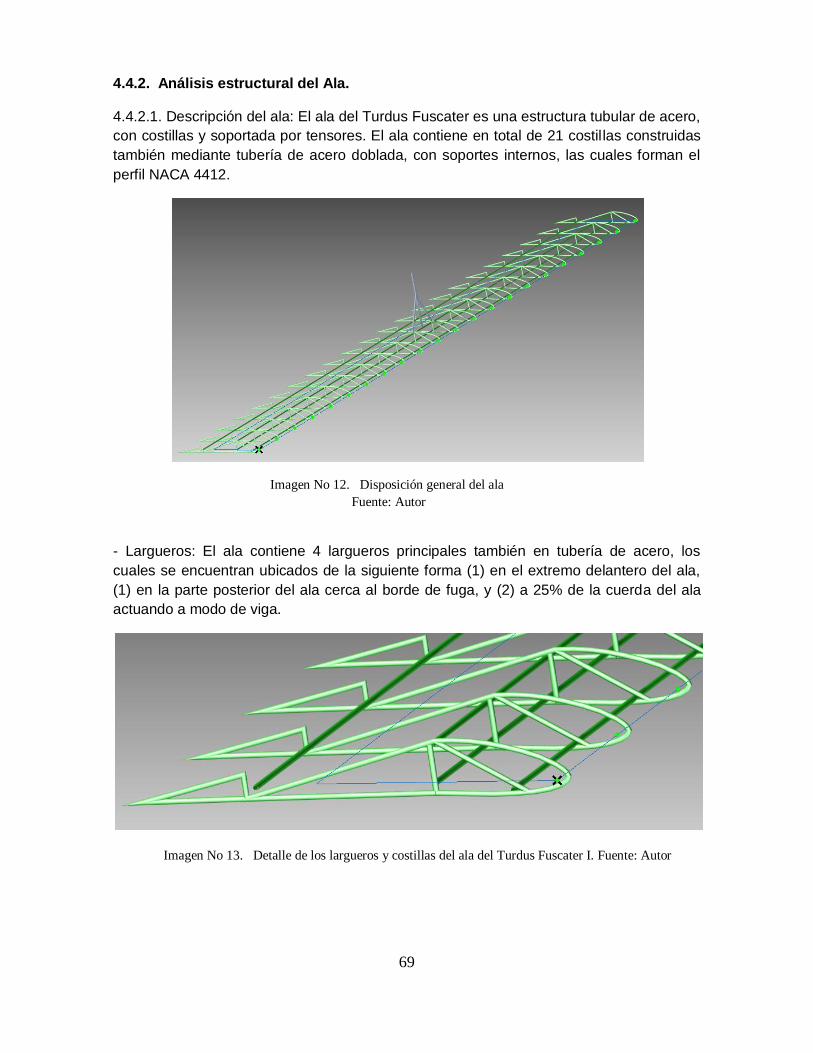
69
4.4.2. Análisis estructural del Ala.
4.4.2.1. Descripción del ala: El ala del Turdus Fuscater es una estructura tubular de acero,
con costillas y soportada por tensores. El ala contiene en total de 21 costillas construidas
también mediante tubería de acero doblada, con soportes internos, las cuales forman el
perfil NACA 4412.
- Largueros: El ala contiene 4 largueros principales también en tubería de acero, los
cuales se encuentran ubicados de la siguiente forma (1) en el extremo delantero del ala,
(1) en la parte posterior del ala cerca al borde de fuga, y (2) a 25% de la cuerda del ala
actuando a modo de viga.
Imagen No 13. Detalle de los largueros y costillas del ala del Turdus Fuscater I. Fuente: Autor
Imagen No 12. Disposición general del ala
Fuente: Autor
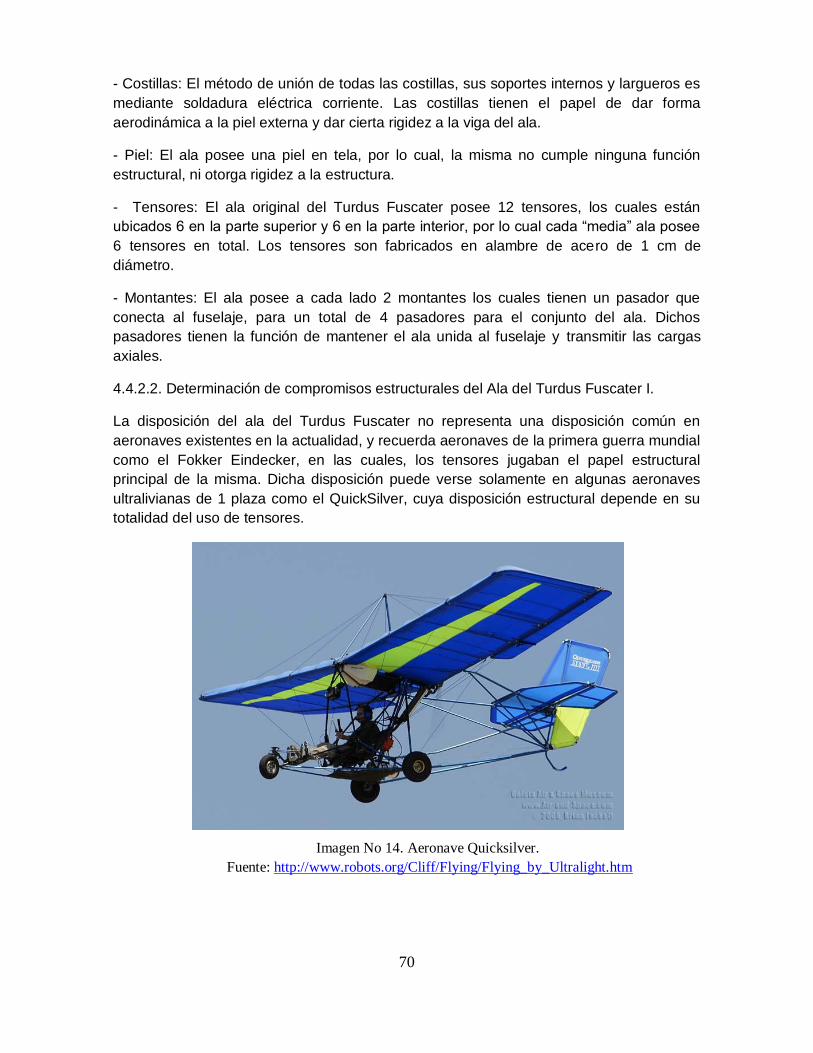
70
- Costillas: El método de unión de todas las costillas, sus soportes internos y largueros es
mediante soldadura eléctrica corriente. Las costillas tienen el papel de dar forma
aerodinámica a la piel externa y dar cierta rigidez a la viga del ala.
- Piel: El ala posee una piel en tela, por lo cual, la misma no cumple ninguna función
estructural, ni otorga rigidez a la estructura.
- Tensores: El ala original del Turdus Fuscater posee 12 tensores, los cuales están
ubicados 6 en la parte superior y 6 en la parte interior, por lo cual cada ―media‖ ala posee
6 tensores en total. Los tensores son fabricados en alambre de acero de 1 cm de
diámetro.
- Montantes: El ala posee a cada lado 2 montantes los cuales tienen un pasador que
conecta al fuselaje, para un total de 4 pasadores para el conjunto del ala. Dichos
pasadores tienen la función de mantener el ala unida al fuselaje y transmitir las cargas
axiales.
4.4.2.2. Determinación de compromisos estructurales del Ala del Turdus Fuscater I.
La disposición del ala del Turdus Fuscater no representa una disposición común en
aeronaves existentes en la actualidad, y recuerda aeronaves de la primera guerra mundial
como el Fokker Eindecker, en las cuales, los tensores jugaban el papel estructural
principal de la misma. Dicha disposición puede verse solamente en algunas aeronaves
ultralivianas de 1 plaza como el QuickSilver, cuya disposición estructural depende en su
totalidad del uso de tensores.
Imagen No 14. Aeronave Quicksilver.
Fuente: http://www.robots.org/Cliff/Flying/Flying_by_Ultralight.htm

71
De acuerdo al numeral 5.1.4 de la norma ASTM 2245-07, es requerido que las cargas se
determinen con una aproximación conservativa. Aunque sería posible realizar un análisis
combinado de la estructura de las alas y los tensores de la misma, se considera más
conservativo determinar si los tensores por si mismos son suficientes para soportar las
cargas de vuelo del Turdus Fuscater I. Esta decisión puede también ser corroborada
luego de un estudio de la información disponible del Turdus Fuscater I11, en donde se
concluye que el ala fue copiada de aeronaves con tensores estructurales en las alas, y los
mismos no fueron adicionados casualmente.
4.4.2.3. Análisis Estructural del Ala
- Disposición de los tensores en el ala.
Los tensores del ala del Turdus Fuscater poseen la siguiente disposición:
Tensor Posición (m)
Ángulo sobre la
horizontal (grados)
Área Transversal tensores (m2)
1 1,23 16 7,85398E-05
2 2,21 25 7,85398E-05
3 3,67 40 7,85398E-05
11 Proyecto Integrador “Turdus Fuscater I”, 2004. Universidad de San Buenaventura
Imagen No 15. Tensores de la aeronave Turdus Fuscater I.
Fuente: Autor
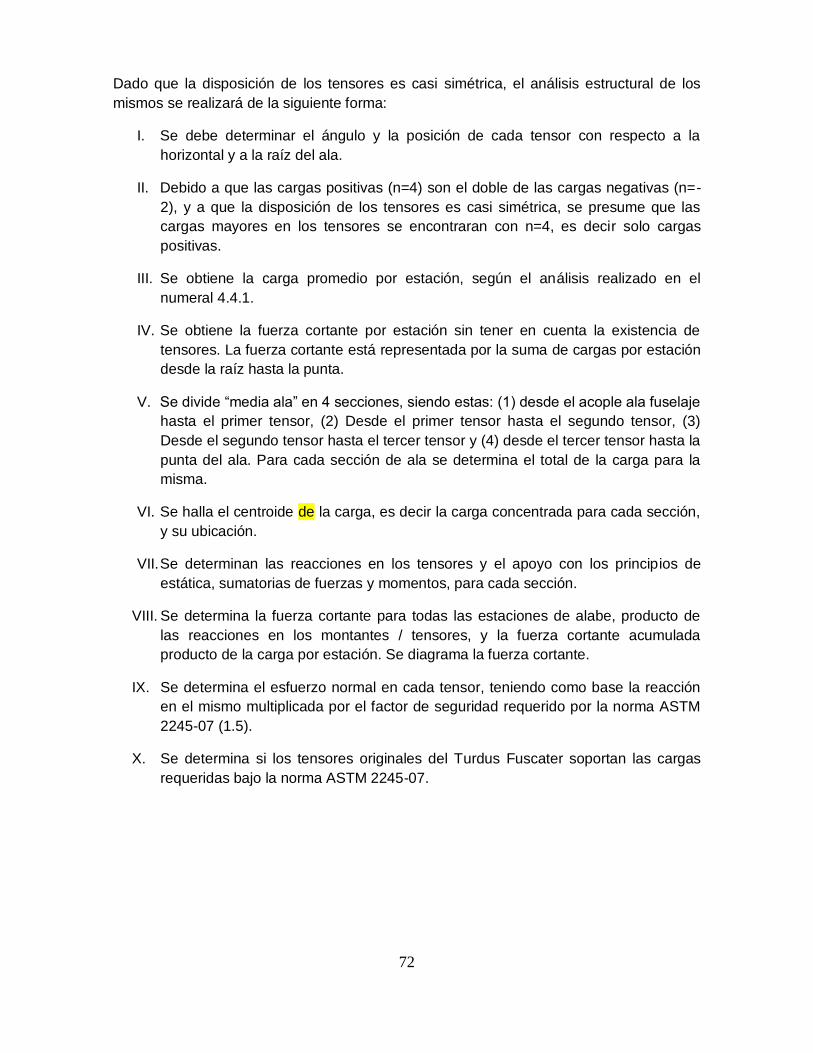
72
Dado que la disposición de los tensores es casi simétrica, el análisis estructural de los
mismos se realizará de la siguiente forma:
I. Se debe determinar el ángulo y la posición de cada tensor con respecto a la
horizontal y a la raíz del ala.
II. Debido a que las cargas positivas (n=4) son el doble de las cargas negativas (n=-
2), y a que la disposición de los tensores es casi simétrica, se presume que las
cargas mayores en los tensores se encontraran con n=4, es decir solo cargas
positivas.
III. Se obtiene la carga promedio por estación, según el análisis realizado en el
numeral 4.4.1.
IV. Se obtiene la fuerza cortante por estación sin tener en cuenta la existencia de
tensores. La fuerza cortante está representada por la suma de cargas por estación
desde la raíz hasta la punta.
V. Se divide ―media ala‖ en 4 secciones, siendo estas: (1) desde el acople ala fuselaje
hasta el primer tensor, (2) Desde el primer tensor hasta el segundo tensor, (3)
Desde el segundo tensor hasta el tercer tensor y (4) desde el tercer tensor hasta la
punta del ala. Para cada sección de ala se determina el total de la carga para la
misma.
VI. Se halla el centroide de la carga, es decir la carga concentrada para cada sección,
y su ubicación.
VII. Se determinan las reacciones en los tensores y el apoyo con los principios de
estática, sumatorias de fuerzas y momentos, para cada sección.
VIII. Se determina la fuerza cortante para todas las estaciones de alabe, producto de
las reacciones en los montantes / tensores, y la fuerza cortante acumulada
producto de la carga por estación. Se diagrama la fuerza cortante.
IX. Se determina el esfuerzo normal en cada tensor, teniendo como base la reacción
en el mismo multiplicada por el factor de seguridad requerido por la norma ASTM
2245-07 (1.5).
X. Se determina si los tensores originales del Turdus Fuscater soportan las cargas
requeridas bajo la norma ASTM 2245-07.
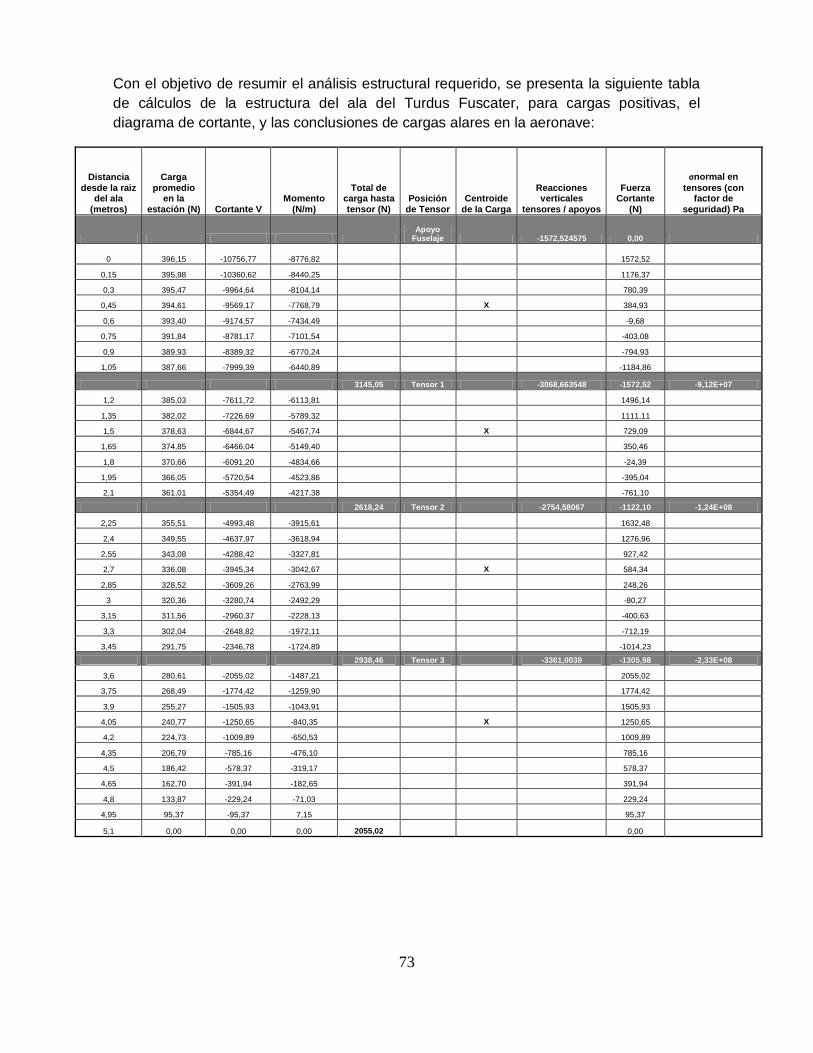
73
Con el objetivo de resumir el análisis estructural requerido, se presenta la siguiente tabla
de cálculos de la estructura del ala del Turdus Fuscater, para cargas positivas, el
diagrama de cortante, y las conclusiones de cargas alares en la aeronave:
Distancia desde la raiz
del ala (metros)
Carga promedio
en la estación (N) Cortante V
Momento (N/m)
Total de carga hasta tensor (N)
Posición de Tensor
Centroide de la Carga
Reacciones verticales
tensores / apoyos
Fuerza Cortante
(N)
σnormal en
tensores (con factor de
seguridad) Pa
Apoyo
Fuselaje -1572,524575 0,00
0 396,15 -10756,77 -8776,82 1572,52
0,15 395,98 -10360,62 -8440,25 1176,37
0,3 395,47 -9964,64 -8104,14 780,39
0,45 394,61 -9569,17 -7768,79 X 384,93
0,6 393,40 -9174,57 -7434,49 -9,68
0,75 391,84 -8781,17 -7101,54 -403,08
0,9 389,93 -8389,32 -6770,24 -794,93
1,05 387,66 -7999,39 -6440,89 -1184,86
3145,05 Tensor 1 -3068,663548 -1572,52 -9,12E+07
1,2 385,03 -7611,72 -6113,81 1496,14
1,35 382,02 -7226,69 -5789,32 1111,11
1,5 378,63 -6844,67 -5467,74 X 729,09
1,65 374,85 -6466,04 -5149,40 350,46
1,8 370,66 -6091,20 -4834,66 -24,39
1,95 366,05 -5720,54 -4523,86 -395,04
2,1 361,01 -5354,49 -4217,38 -761,10
2618,24 Tensor 2 -2754,58067 -1122,10 -1,24E+08
2,25 355,51 -4993,48 -3915,61 1632,48
2,4 349,55 -4637,97 -3618,94 1276,96
2,55 343,08 -4288,42 -3327,81 927,42
2,7 336,08 -3945,34 -3042,67 X 584,34
2,85 328,52 -3609,26 -2763,99 248,26
3 320,36 -3280,74 -2492,29 -80,27
3,15 311,56 -2960,37 -2228,13 -400,63
3,3 302,04 -2648,82 -1972,11 -712,19
3,45 291,75 -2346,78 -1724,89 -1014,23
2938,46 Tensor 3 -3361,0039 -1305,98 -2,33E+08
3,6 280,61 -2055,02 -1487,21 2055,02
3,75 268,49 -1774,42 -1259,90 1774,42
3,9 255,27 -1505,93 -1043,91 1505,93
4,05 240,77 -1250,65 -840,35 X 1250,65
4,2 224,73 -1009,89 -650,53 1009,89
4,35 206,79 -785,16 -476,10 785,16
4,5 186,42 -578,37 -319,17 578,37
4,65 162,70 -391,94 -182,65 391,94
4,8 133,87 -229,24 -71,03 229,24
4,95 95,37 -95,37 7,15 95,37
5,1 0,00 0,00 0,00 2055,02 0,00
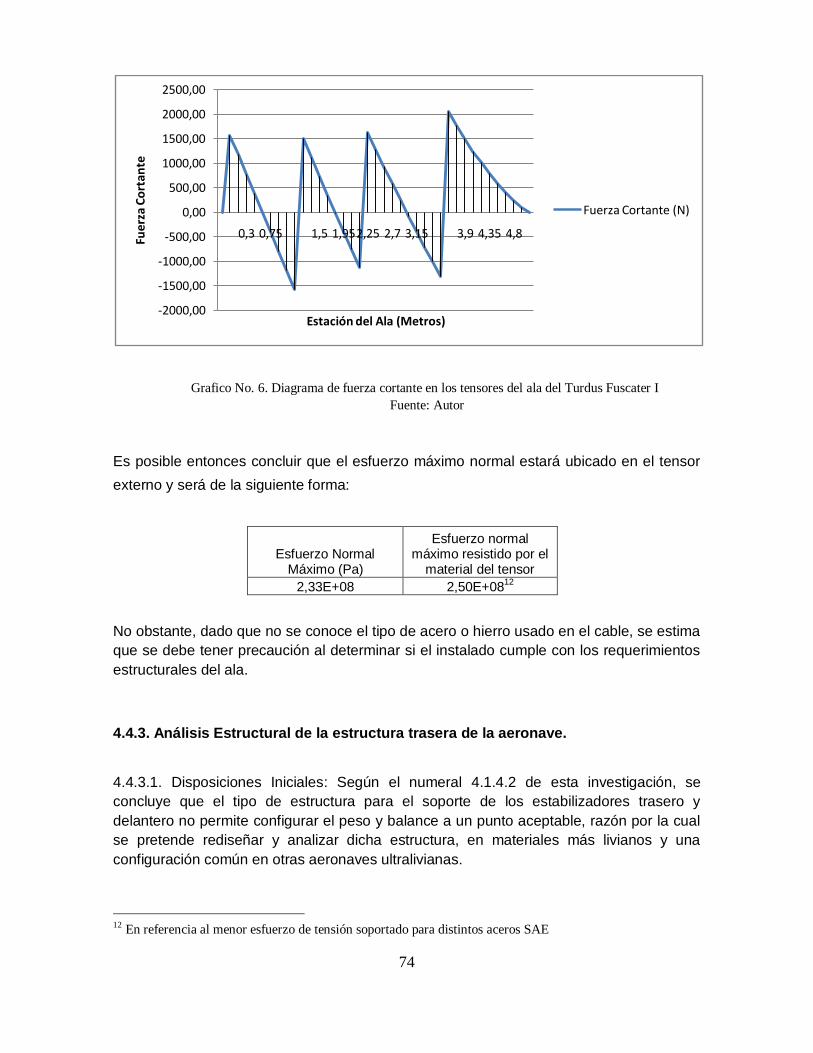
74
Es posible entonces concluir que el esfuerzo máximo normal estará ubicado en el tensor
externo y será de la siguiente forma:
Esfuerzo Normal Máximo (Pa)
Esfuerzo normal máximo resistido por el
material del tensor
2,33E+08 2,50E+0812
No obstante, dado que no se conoce el tipo de acero o hierro usado en el cable, se estima
que se debe tener precaución al determinar si el instalado cumple con los requerimientos
estructurales del ala.
4.4.3. Análisis Estructural de la estructura trasera de la aeronave.
4.4.3.1. Disposiciones Iniciales: Según el numeral 4.1.4.2 de esta investigación, se
concluye que el tipo de estructura para el soporte de los estabilizadores trasero y
delantero no permite configurar el peso y balance a un punto aceptable, razón por la cual
se pretende rediseñar y analizar dicha estructura, en materiales más livianos y una
configuración común en otras aeronaves ultralivianas.
12 En referencia al menor esfuerzo de tensión soportado para distintos aceros SAE
-2000,00
-1500,00
-1000,00
-500,00
0,00
500,00
1000,00
1500,00
2000,00
2500,00
0,3 0,75 1,5 1,952,25 2,7 3,15 3,9 4,35 4,8
Fue
rza
Co
rtan
te
Estación del Ala (Metros)
Fuerza Cortante (N)
Grafico No. 6. Diagrama de fuerza cortante en los tensores del ala del Turdus Fuscater I
Fuente: Autor
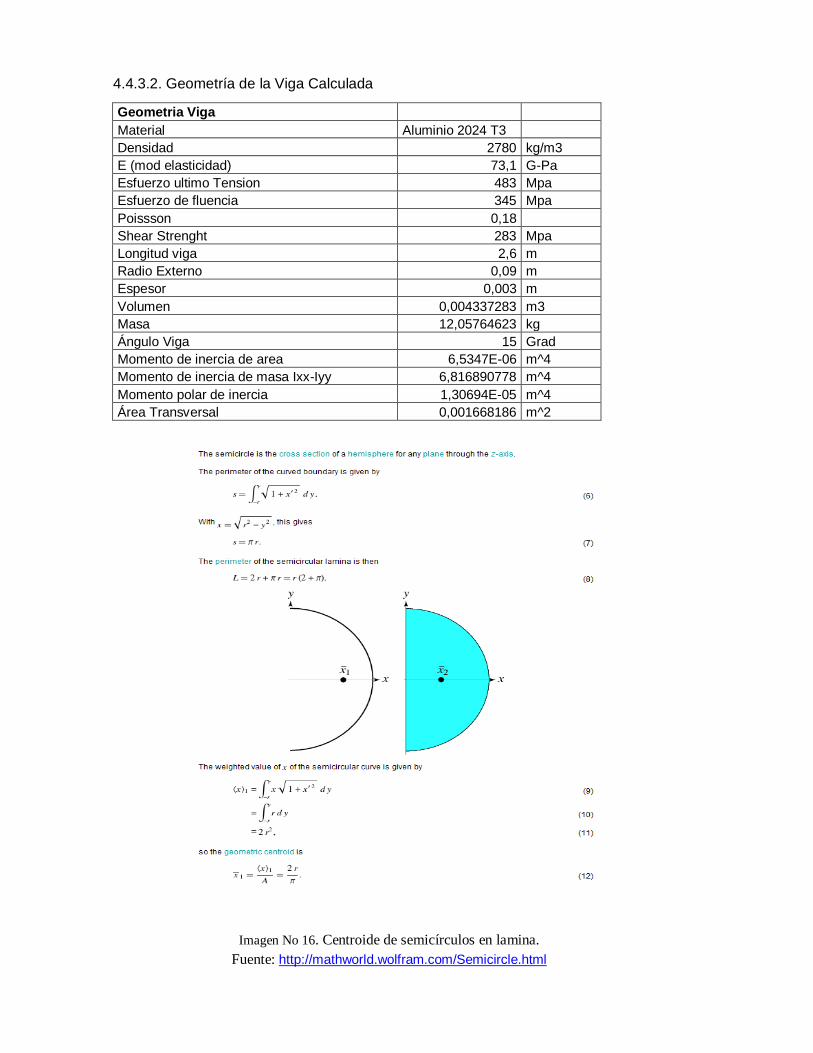
75
4.4.3.2. Geometría de la Viga Calculada
Geometria Viga
Material Aluminio 2024 T3
Densidad 2780 kg/m3
E (mod elasticidad) 73,1 G-Pa
Esfuerzo ultimo Tension 483 Mpa
Esfuerzo de fluencia 345 Mpa
Poissson 0,18
Shear Strenght 283 Mpa
Longitud viga 2,6 m
Radio Externo 0,09 m
Espesor 0,003 m
Volumen 0,004337283 m3
Masa 12,05764623 kg
Ángulo Viga 15 Grad
Momento de inercia de area 6,5347E-06 m^4
Momento de inercia de masa Ixx-Iyy 6,816890778 m^4
Momento polar de inercia 1,30694E-05 m^4
Área Transversal 0,001668186 m^2
http://mathworld.wolfram.com/Semicircle.html Imagen No 16. Centroide de semicírculos en lamina.
Fuente: http://mathworld.wolfram.com/Semicircle.html
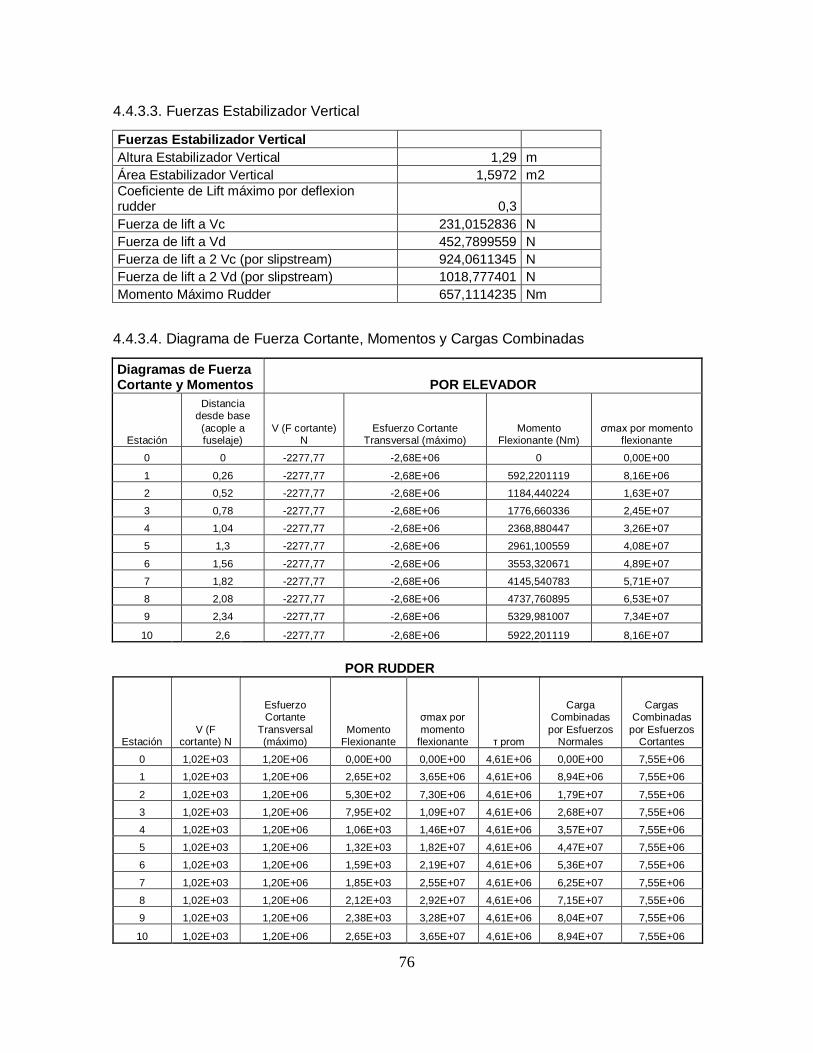
76
4.4.3.3. Fuerzas Estabilizador Vertical
Fuerzas Estabilizador Vertical
Altura Estabilizador Vertical 1,29 m
Área Estabilizador Vertical 1,5972 m2
Coeficiente de Lift máximo por deflexion rudder 0,3
Fuerza de lift a Vc 231,0152836 N
Fuerza de lift a Vd 452,7899559 N
Fuerza de lift a 2 Vc (por slipstream) 924,0611345 N
Fuerza de lift a 2 Vd (por slipstream) 1018,777401 N
Momento Máximo Rudder 657,1114235 Nm
4.4.3.4. Diagrama de Fuerza Cortante, Momentos y Cargas Combinadas
Diagramas de Fuerza Cortante y Momentos POR ELEVADOR
Estación
Distancia desde base
(acople a fuselaje)
V (F cortante) N
Esfuerzo Cortante Transversal (máximo)
Momento Flexionante (Nm)
σmax por momento flexionante
0 0 -2277,77 -2,68E+06 0 0,00E+00
1 0,26 -2277,77 -2,68E+06 592,2201119 8,16E+06
2 0,52 -2277,77 -2,68E+06 1184,440224 1,63E+07
3 0,78 -2277,77 -2,68E+06 1776,660336 2,45E+07
4 1,04 -2277,77 -2,68E+06 2368,880447 3,26E+07
5 1,3 -2277,77 -2,68E+06 2961,100559 4,08E+07
6 1,56 -2277,77 -2,68E+06 3553,320671 4,89E+07
7 1,82 -2277,77 -2,68E+06 4145,540783 5,71E+07
8 2,08 -2277,77 -2,68E+06 4737,760895 6,53E+07
9 2,34 -2277,77 -2,68E+06 5329,981007 7,34E+07
10 2,6 -2277,77 -2,68E+06 5922,201119 8,16E+07
POR RUDDER
Estación V (F
cortante) N
Esfuerzo Cortante
Transversal (máximo)
Momento Flexionante
σmax por
momento flexionante τ prom
Carga Combinadas
por Esfuerzos Normales
Cargas Combinadas
por Esfuerzos Cortantes
0 1,02E+03 1,20E+06 0,00E+00 0,00E+00 4,61E+06 0,00E+00 7,55E+06
1 1,02E+03 1,20E+06 2,65E+02 3,65E+06 4,61E+06 8,94E+06 7,55E+06
2 1,02E+03 1,20E+06 5,30E+02 7,30E+06 4,61E+06 1,79E+07 7,55E+06
3 1,02E+03 1,20E+06 7,95E+02 1,09E+07 4,61E+06 2,68E+07 7,55E+06
4 1,02E+03 1,20E+06 1,06E+03 1,46E+07 4,61E+06 3,57E+07 7,55E+06
5 1,02E+03 1,20E+06 1,32E+03 1,82E+07 4,61E+06 4,47E+07 7,55E+06
6 1,02E+03 1,20E+06 1,59E+03 2,19E+07 4,61E+06 5,36E+07 7,55E+06
7 1,02E+03 1,20E+06 1,85E+03 2,55E+07 4,61E+06 6,25E+07 7,55E+06
8 1,02E+03 1,20E+06 2,12E+03 2,92E+07 4,61E+06 7,15E+07 7,55E+06
9 1,02E+03 1,20E+06 2,38E+03 3,28E+07 4,61E+06 8,04E+07 7,55E+06
10 1,02E+03 1,20E+06 2,65E+03 3,65E+07 4,61E+06 8,94E+07 7,55E+06
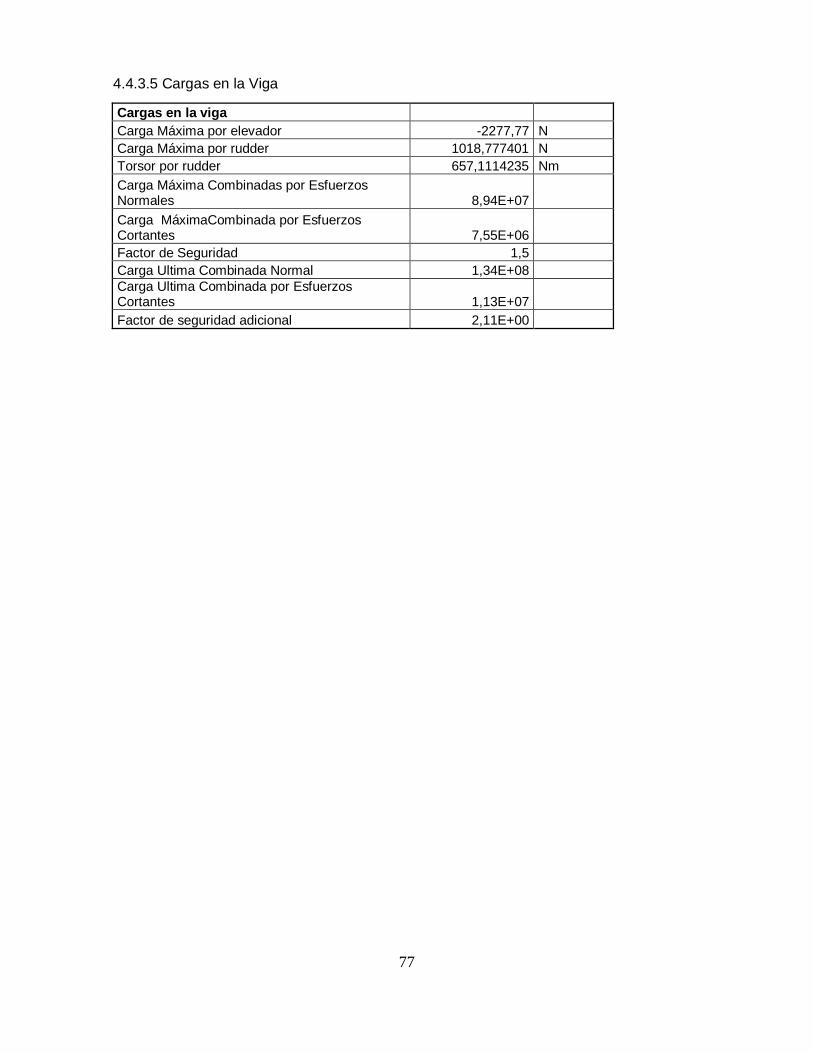
77
4.4.3.5 Cargas en la Viga
Cargas en la viga
Carga Máxima por elevador -2277,77 N
Carga Máxima por rudder 1018,777401 N
Torsor por rudder 657,1114235 Nm
Carga Máxima Combinadas por Esfuerzos Normales 8,94E+07
Carga MáximaCombinada por Esfuerzos Cortantes 7,55E+06
Factor de Seguridad 1,5
Carga Ultima Combinada Normal 1,34E+08
Carga Ultima Combinada por Esfuerzos Cortantes 1,13E+07
Factor de seguridad adicional 2,11E+00
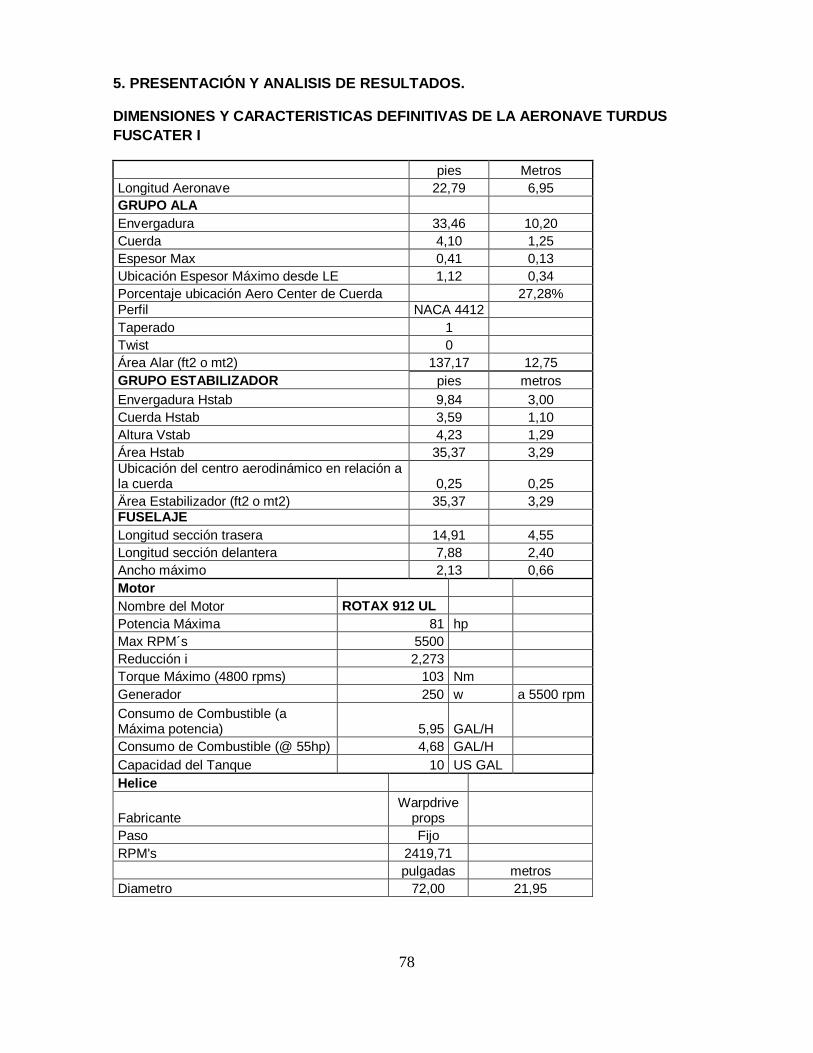
78
5. PRESENTACIÓN Y ANALISIS DE RESULTADOS.
DIMENSIONES Y CARACTERISTICAS DEFINITIVAS DE LA AERONAVE TURDUS
FUSCATER I
pies Metros
Longitud Aeronave 22,79 6,95
GRUPO ALA
Envergadura 33,46 10,20
Cuerda 4,10 1,25
Espesor Max 0,41 0,13
Ubicación Espesor Máximo desde LE 1,12 0,34
Porcentaje ubicación Aero Center de Cuerda 27,28%
Perfil NACA 4412
Taperado 1
Twist 0
Área Alar (ft2 o mt2) 137,17 12,75
GRUPO ESTABILIZADOR pies metros
Envergadura Hstab 9,84 3,00
Cuerda Hstab 3,59 1,10
Altura Vstab 4,23 1,29
Área Hstab 35,37 3,29
Ubicación del centro aerodinámico en relación a la cuerda 0,25 0,25
Ärea Estabilizador (ft2 o mt2) 35,37 3,29 FUSELAJE
Longitud sección trasera 14,91 4,55
Longitud sección delantera 7,88 2,40
Ancho máximo 2,13 0,66
Motor
Nombre del Motor ROTAX 912 UL
Potencia Máxima 81 hp
Max RPM´s 5500
Reducción i 2,273
Torque Máximo (4800 rpms) 103 Nm
Generador 250 w a 5500 rpm
Consumo de Combustible (a Máxima potencia) 5,95 GAL/H
Consumo de Combustible (@ 55hp) 4,68 GAL/H
Capacidad del Tanque 10 US GAL
Helice
Fabricante Warpdrive
props
Paso Fijo
RPM's 2419,71
pulgadas metros
Diametro 72,00 21,95
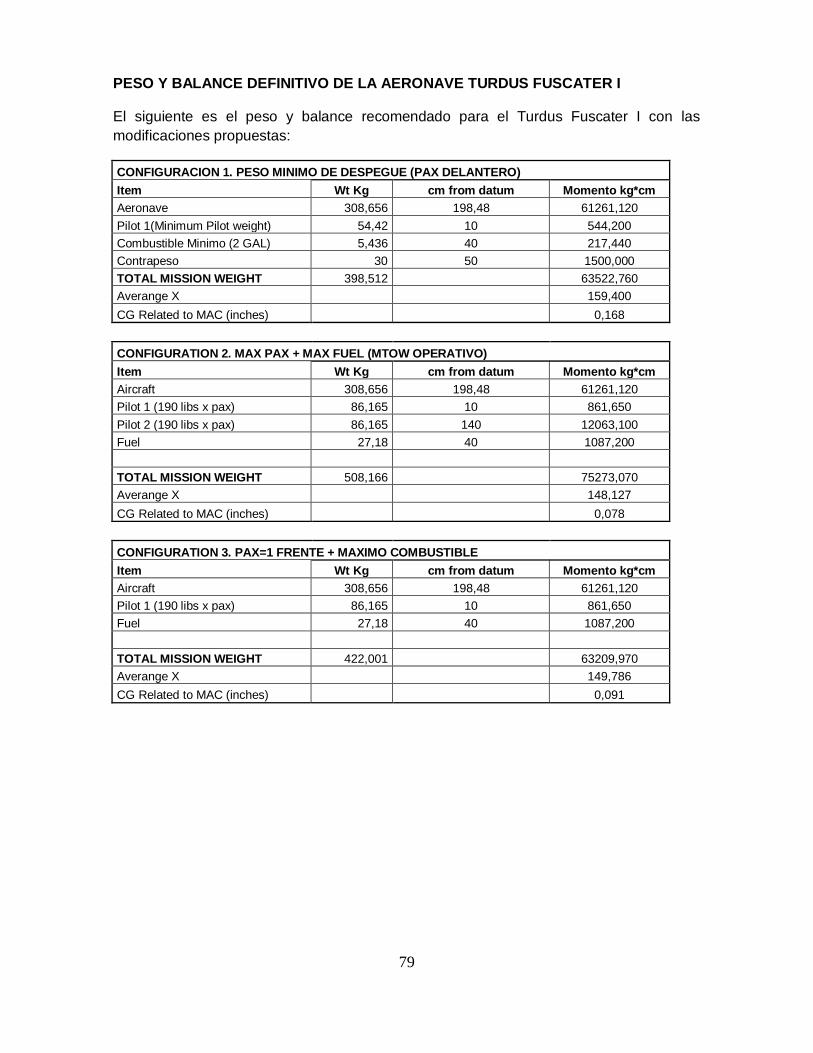
79
PESO Y BALANCE DEFINITIVO DE LA AERONAVE TURDUS FUSCATER I
El siguiente es el peso y balance recomendado para el Turdus Fuscater I con las
modificaciones propuestas:
CONFIGURACION 1. PESO MINIMO DE DESPEGUE (PAX DELANTERO)
Item Wt Kg cm from datum Momento kg*cm
Aeronave 308,656 198,48 61261,120
Pilot 1(Minimum Pilot weight) 54,42 10 544,200
Combustible Minimo (2 GAL) 5,436 40 217,440
Contrapeso 30 50 1500,000
TOTAL MISSION WEIGHT 398,512 63522,760
Averange X 159,400
CG Related to MAC (inches) 0,168
CONFIGURATION 2. MAX PAX + MAX FUEL (MTOW OPERATIVO)
Item Wt Kg cm from datum Momento kg*cm
Aircraft 308,656 198,48 61261,120
Pilot 1 (190 libs x pax) 86,165 10 861,650
Pilot 2 (190 libs x pax) 86,165 140 12063,100
Fuel 27,18 40 1087,200
TOTAL MISSION WEIGHT 508,166 75273,070
Averange X 148,127
CG Related to MAC (inches) 0,078
CONFIGURATION 3. PAX=1 FRENTE + MAXIMO COMBUSTIBLE
Item Wt Kg cm from datum Momento kg*cm
Aircraft 308,656 198,48 61261,120
Pilot 1 (190 libs x pax) 86,165 10 861,650
Fuel 27,18 40 1087,200
TOTAL MISSION WEIGHT 422,001 63209,970
Averange X 149,786
CG Related to MAC (inches) 0,091
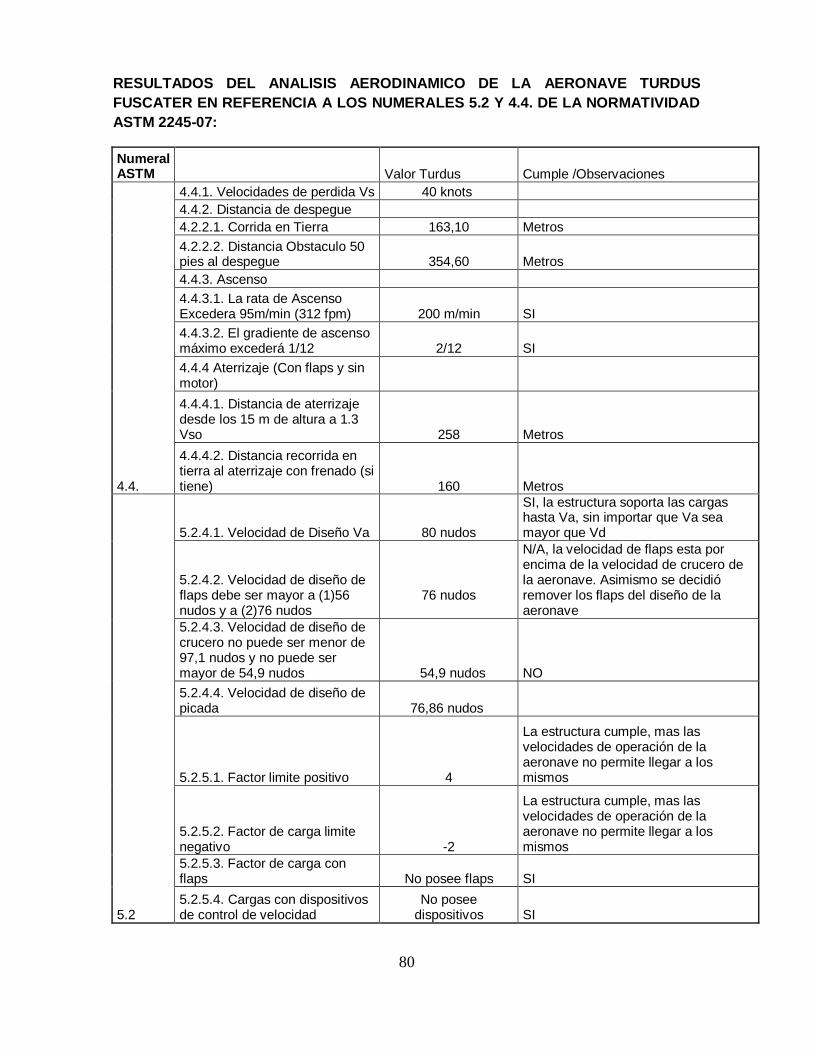
80
RESULTADOS DEL ANALISIS AERODINAMICO DE LA AERONAVE TURDUS
FUSCATER EN REFERENCIA A LOS NUMERALES 5.2 Y 4.4. DE LA NORMATIVIDAD
ASTM 2245-07:
Numeral ASTM Valor Turdus Cumple /Observaciones
4.4.
4.4.1. Velocidades de perdida Vs 40 knots
4.4.2. Distancia de despegue
4.2.2.1. Corrida en Tierra 163,10 Metros
4.2.2.2. Distancia Obstaculo 50 pies al despegue 354,60 Metros
4.4.3. Ascenso
4.4.3.1. La rata de Ascenso Excedera 95m/min (312 fpm) 200 m/min SI
4.4.3.2. El gradiente de ascenso máximo excederá 1/12 2/12 SI
4.4.4 Aterrizaje (Con flaps y sin motor)
4.4.4.1. Distancia de aterrizaje desde los 15 m de altura a 1.3 Vso 258 Metros
4.4.4.2. Distancia recorrida en tierra al aterrizaje con frenado (si tiene) 160 Metros
5.2
5.2.4.1. Velocidad de Diseño Va 80 nudos
SI, la estructura soporta las cargas hasta Va, sin importar que Va sea mayor que Vd
5.2.4.2. Velocidad de diseño de flaps debe ser mayor a (1)56 nudos y a (2)76 nudos
76 nudos
N/A, la velocidad de flaps esta por encima de la velocidad de crucero de la aeronave. Asimismo se decidió remover los flaps del diseño de la aeronave
5.2.4.3. Velocidad de diseño de crucero no puede ser menor de 97,1 nudos y no puede ser mayor de 54,9 nudos 54,9 nudos NO
5.2.4.4. Velocidad de diseño de picada 76,86 nudos
5.2.5.1. Factor limite positivo 4
La estructura cumple, mas las velocidades de operación de la aeronave no permite llegar a los mismos
5.2.5.2. Factor de carga limite negativo -2
La estructura cumple, mas las velocidades de operación de la aeronave no permite llegar a los mismos
5.2.5.3. Factor de carga con flaps No posee flaps SI
5.2.5.4. Cargas con dispositivos de control de velocidad
No posee dispositivos SI

81
RESULTADOS DEL ANÁLISIS DE ESTABILIDAD LONGITUDINAL Y LATERAL
DIRECCIONAL ESTATICA DE LA AERONAVE TURDUS FUSCATER:
Numerales de Estabilidad y Control ASTM Valor Turdus Cumple /Observaciones
4.5
4.5.4.1. La aeronave debe poder ser trimeada a velocidades estables para los regimenes de trabajo (ascenso, descenso, crucero
No posee aletas compensadoras NO
4.5.4.2. El avión exhibira un comportamiento longitudinal estable a cualquier velocidad por encima de la velocidad de perdida y en la configuración mas critica SI
4.5.4.3. El avión debera tener una tendencia de volver a su condición estable luego de un empujon en los controles (hasta su posición trimeada)
No tiene aletas compensadores
NO cumple al no tener aletas compensadoras pero si es estable
RESULTADOS DEL ANÁLISIS DE CARGAS DE LA AERONAVE TURDUS FUSCATER
Estructura
FACTOR DE SEGURIDAD REQUERIDO
FACTOR DE SEGURIDAD REAL CUMPLE
Tensores de las alas 1,5 1,6 SI
Viga de soporte de los estabilizadores 1,5 4,5 SI
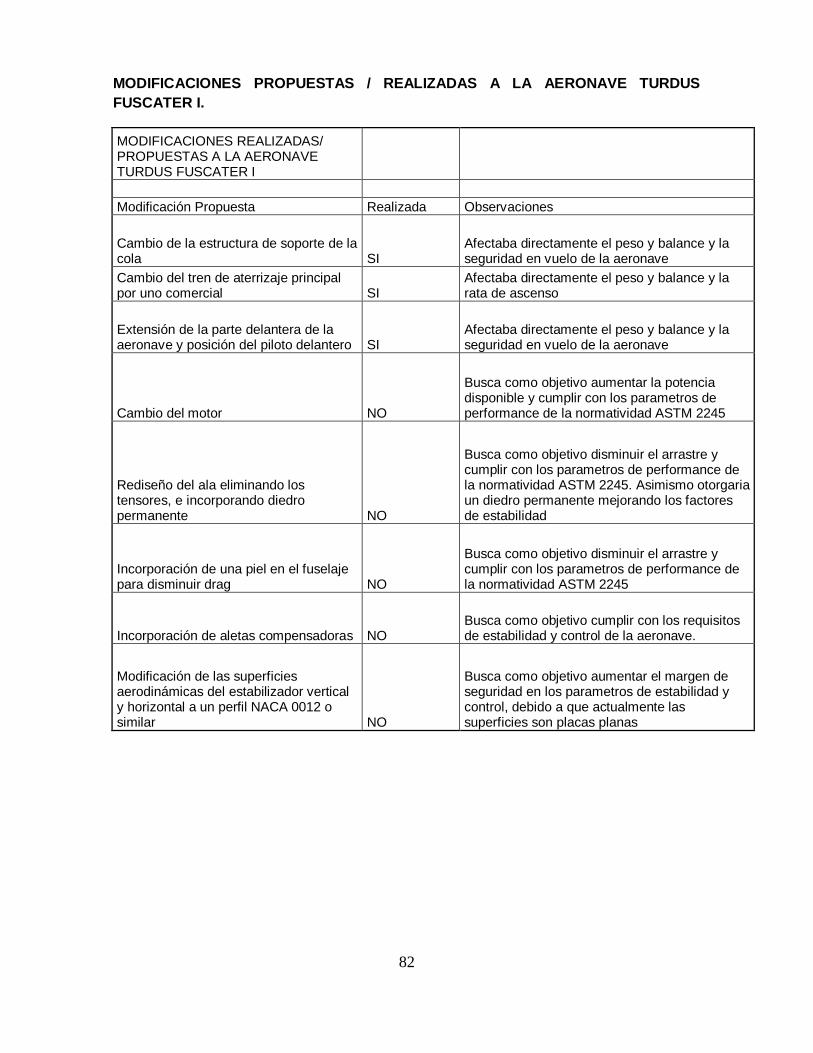
82
MODIFICACIONES PROPUESTAS / REALIZADAS A LA AERONAVE TURDUS
FUSCATER I.
MODIFICACIONES REALIZADAS/ PROPUESTAS A LA AERONAVE TURDUS FUSCATER I
Modificación Propuesta Realizada Observaciones
Cambio de la estructura de soporte de la cola SI
Afectaba directamente el peso y balance y la seguridad en vuelo de la aeronave
Cambio del tren de aterrizaje principal por uno comercial SI
Afectaba directamente el peso y balance y la rata de ascenso
Extensión de la parte delantera de la aeronave y posición del piloto delantero SI
Afectaba directamente el peso y balance y la seguridad en vuelo de la aeronave
Cambio del motor NO
Busca como objetivo aumentar la potencia disponible y cumplir con los parametros de performance de la normatividad ASTM 2245
Rediseño del ala eliminando los tensores, e incorporando diedro permanente NO
Busca como objetivo disminuir el arrastre y cumplir con los parametros de performance de la normatividad ASTM 2245. Asimismo otorgaria un diedro permanente mejorando los factores de estabilidad
Incorporación de una piel en el fuselaje para disminuir drag NO
Busca como objetivo disminuir el arrastre y cumplir con los parametros de performance de la normatividad ASTM 2245
Incorporación de aletas compensadoras NO Busca como objetivo cumplir con los requisitos de estabilidad y control de la aeronave.
Modificación de las superficies aerodinámicas del estabilizador vertical y horizontal a un perfil NACA 0012 o similar NO
Busca como objetivo aumentar el margen de seguridad en los parametros de estabilidad y control, debido a que actualmente las superficies son placas planas

83
6. CONCLUSIONES
De forma general, esta investigación cumplió con su objetivo general y problema de
investigación al concluir de forma preliminar si la aeronave Turdus Fuscater es apta para
vuelo seguro.
En referencia al peso y balance de la aeronave Turdus Fuscater, se menciona concluye
que fue cumplido a cabalidad con lo proyectado por los objetivos específicos. Aunque no
se contaba con todos los detalles para el modelamiento de la aeronave –y fue necesario
asumir algunos valores- se considera vital el uso del CAD como base del modelamiento
de pesos y balance de la aeronave, siendo este pasó el primero a cumplir en un análisis
como el realizado en esta investigación. Del análisis de peso y balance de la aeronave se
puede concluir principalmente que la aeronave fue diseñada sin ningún tipo de previsión
de la ubicación del centro de gravedad final, ya que ninguna configuración existente
permitió acercar el centro de gravedad de la aeronave a una configuración segura,
obligando al rediseño de la aeronave.
Con respecto a la sección aerodinámica y de performance, en esta investigación se
analizaron matemáticamente los factores principales relevantes en normatividad ASTM
2245, los cuales según la misma deben ser comprobados mediante vuelos de pruebas.
En este orden de ideas, y sin llegar a obtener datos exactos como los que se obtendrían
mediante vuelos de pruebas, fue posible analizar de manera preliminar las características
aerodinámicas y de performance de la aeronave de manera suficientemente objetiva
como para cumplir con los requerimientos de esta investigación, concluyendo de manera
general que las características aerodinámicas y de performance del Turdus Fuscater –y
sin cumplir en todos los casos los requerimientos de la normatividad ASTM 2245- resultan
similares a las de aeronaves construidas en los inicios de la aviación, requiriendo un
pilotaje diferente al de las aeronaves actuales para poder realizar un vuelo seguro.
La investigación realizo un análisis de estabilidad estática según como estaba previsto en
los objetivos específicos. Dicho análisis se concentro en las características de estabilidad
y control que afectaban directamente la seguridad en vuelo de la aeronave y su
controlabilidad en el rango de velocidades permisible para la misma. Los demás factores
de estabilidad estática y control que no afectaban directamente la seguridad en vuelo de
la aeronave no fueron tenidos en cuenta en este análisis. Dado que la estabilidad de una
aeronave depende directamente del peso y balance de la misma, y teniendo en cuenta los
resultados del análisis de peso y balance, se concluye que el diseño original de la
aeronave Turdus Fuscater resulta ampliamente inestable e imposible de controlar,
obligando a una modificación del diseño del mismo.
En referencia a la sección estructural, se analizaron dos conjuntos estructurales primarios
–conjunto de alas y conjunto de fuselaje trasero-, los que a juicio de los autores son los
más críticos a la hora de realizar un análisis preliminar enfocado a la seguridad estructural
de la aeronave puesto que transfieren las mayores cargas y es donde se encuentran los
84
más altos esfuerzos. Las conclusiones del análisis de la sección estructural demuestran
que en los aspectos analizados, la aeronave Turdus Fuscater I está sobredimensionada
estructuralmente, generalmente por un amplio margen, afectando negativamente el peso,
el balance, el comportamiento aerodinámico, el performance y el control.
Dada la condición empírica de diseño de la aeronave, y el enfoque hacia la seguridad de
vuelo de la aeronave, fue requerido realizar algunas modificaciones en la aeronave para
poder proseguir con el análisis matemático en cumplimiento de los objetivos de la
investigación. Solo se realizaron modificaciones en los aspectos claves para la seguridad
de vuelo determinados por esta investigación, no obstante se propusieron diversas
mejoras para ser analizadas por investigaciones posteriores, con el objeto de mejorar las
cualidades de la aeronave.
De acuerdo a los resultados del análisis de esta investigación resulta importante concluir
que a juicio de los autores, una aeronave construida de manera empírica y sin ningún tipo
de cálculos, prácticamente no tiene posibilidades de ser segura para vuelo, demostrando
entonces la importancia de seguir alguna de las metodologías de diseño de aeronaves
creadas por diferentes autores.
Por último, en cuanto a la decisión en esta investigación de utilizar como referencia la
normatividad ASTM 2245 para los diversos análisis realizados, se concluye que resulto
siendo una decisión correcta en cuanto a que no existe alguna otra compilación o
estándar aprobado por las entidades aeronáuticas de los países miembros de la OACI
que resuma de manera más breve y concisa los requisitos de diseño y seguridad de vuelo
de una aeronave ligera.
85
7. RECOMENDACIONES
De acuerdo a los resultados de la investigación y las diversas conclusiones obtenidas,
resulta acertado proponer las siguientes recomendaciones aplicables no solo a la
aeronave Turdus Fuscater, sino a otros proyectos de aeronaves ligeras o categoría
experimental.
7.1 RECOMENDACIONES PARA DESARROLLO POSTERIOR DE LA AERONAVE
Las siguientes modificaciones están orientadas a desarrollos posteriores en la aeronave
Turdus Fuscater I con base en los resultados de esta investigación
Adoptar las modificaciones recomendadas para el Turdus Fuscater I con el objetivo
de cumplir los numerales analizados en esta investigación de la norma ASTM 2245
Realizar un análisis estructural detallado de la aeronave verificando los numerales
relevantes de la norma ASTM 2245 en elementos como pasadores, tren de aterrizaje,
habitáculo, soldadura y completar el diseño de la aeronave con elementos no
presentes como la bancada del motor, tornillería, etc.
Realizar un estudio estructural de la estructura de las alas con el objetivo de eliminar
los tensores y aumentar la eficiencia aerodinámica de la aeronave, determinando si la
estructura del ala en si cumple con los requisitos de carga de la norma ASTM 2245, y
en caso de ser necesario, implementar las modificaciones requeridas para su
cumplimiento.
Diseñar un nuevo tren de aterrizaje para la aeronave que permita reducir peso y
mejorar el rendimiento de la misma.
Diseñar los sistemas de control, guayas y otros elementos relacionados de la
aeronave cumpliendo con los requisitos de la norma ASTM 2245
Realizar un análisis de corrosión de la estructura actual de la aeronave, determinando
si puede ser recuperada o no, y describiendo en forma detallada el grado de
afectación de la misma y el procedimiento para su recuperación.
7.2 OTRAS RECOMENDACIONES DERIVADAS DE LA INVESTIGACIÓN
Adicionalmente a las recomendaciones enfocadas a complementar y continuar el proyecto
del Turdus Fuscater I, resulta apropiado generar otras recomendaciones producto de la
experiencia aprendida en este proyecto.
Realizar una investigación que tenga como objetivo proponer a la Aeronáutica Civil
una normatividad con menos requisitos que la norma ASTM 2245, orientada a la
seguridad de vuelo de aeronaves de categoría experimental construidas por
aficionados y que no aplican a la categoría de ultraliviano clase II (LSA bajo la FAA).
Incluir y usar la normatividad ASTM 2245 como referencia académica en las materias
relevantes de diseño y certificación aeronáutica, dado que resulta inicialmente más
fácil de trabajar y seguir que otras normas de categorías como FAR 23 y 25.
86
BIBLIOGRAFÍA
ALVARADO PERILLA , Juan Pablo. Diseño de un kit de alas para un avión aeronave
.Bogotá D.C 2002, 351. Trabajo de grado (ingeniero aeronáutico). Universidad de San
Buenaventura. Facultad de ingeniería. Programa aeronáutica.
ASTM, Designation F2245-07 STANDARD SPECIFICATION FOR DESIGN AND
PERFORMANCE OF LIGHT SPORT AIRCRAFT – 2007
BEDFORD Anthony, FOWLER Wallace. Mecánica para ingeniería: Estática. México.
Addison Wesley, Iberoamericana, S.A. 1996.
BRUHN E.F, Analysis and Design of Flight Vehicle Structures
CALDERON PEREZ, Jorge Luis. Diseño preliminar de un Flexwing Trike Biplaza. Bogotá
D.C 2008. Trabajo de grado (Ingeniero Aeronáutico.)Unversidad de San Buenaventura.
Facultad de ingeniería. Programa aeronáutica.
FONSECA JIMENO, Carlos Miguel. Diseño preliminar de un Aeronave para vigilancia de
carreteras. Bogotá D.C 2007. Trabajo de grado (Ingeniero Aeronáutico.)Universidad de
San Buenaventura. Facultad de ingeniería. Programa aeronáutica.
HIBBELER R.C, Mecánica de Materiales, PEARSON
LOWRY, JOHN F. Performance of Light Aircraft. AIAA
MUNSON, YOUNG, OKIISHI, Fundamentos de Mecánica de Fluidos. LIMUSA WILEY
NACA, REPORTE 563 – 648 – 586 - 948.
RAYMER, DANIEL P, Aircraft Design- A Conceptual Approach
ROSKAM, JAN, Airplane Aerodynamics and Performance. DAR CORPORATION.
ROSKAM, JAN, Airplane Flight Dynamics and Automatic Flight Controls. DAR
CORPORATION.
TAMAYO Y TAMAYO, Mario. El proceso de la investigación científica. México. Editorial
Limusa, S.A. 2000.
SITIOS WEB
REGLAMENTOS AERONAUTICOS DE COLOMBIA. RAC http://portal.aerocivil.gov.co/portal/page/portal/Aerocivil_Portal_Internet/normatividad/rac/indice_general FEDERAL AVIATION ADMINISTRATION REGULATIONS http://www.faa.gov/regulations_policies/faa_regulations/
MOTORES ROTAX
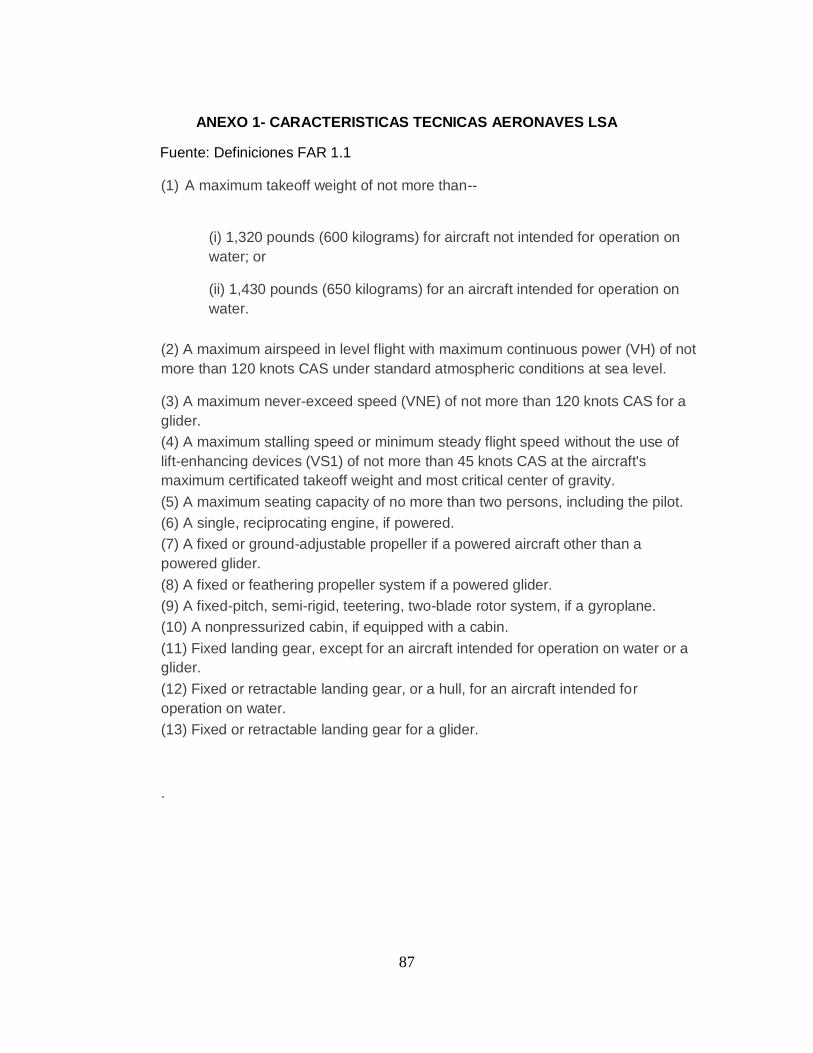
87
ANEXO 1- CARACTERISTICAS TECNICAS AERONAVES LSA
Fuente: Definiciones FAR 1.1
(1) A maximum takeoff weight of not more than--
(i) 1,320 pounds (600 kilograms) for aircraft not intended for operation on
water; or
(ii) 1,430 pounds (650 kilograms) for an aircraft intended for operation on
water.
(2) A maximum airspeed in level flight with maximum continuous power (VH) of not
more than 120 knots CAS under standard atmospheric conditions at sea level.
(3) A maximum never-exceed speed (VNE) of not more than 120 knots CAS for a
glider.
(4) A maximum stalling speed or minimum steady flight speed without the use of
lift-enhancing devices (VS1) of not more than 45 knots CAS at the aircraft's
maximum certificated takeoff weight and most critical center of gravity.
(5) A maximum seating capacity of no more than two persons, including the pilot.
(6) A single, reciprocating engine, if powered.
(7) A fixed or ground-adjustable propeller if a powered aircraft other than a
powered glider.
(8) A fixed or feathering propeller system if a powered glider.
(9) A fixed-pitch, semi-rigid, teetering, two-blade rotor system, if a gyroplane.
(10) A nonpressurized cabin, if equipped with a cabin.
(11) Fixed landing gear, except for an aircraft intended for operation on water or a
glider.
(12) Fixed or retractable landing gear, or a hull, for an aircraft intended for
operation on water.
(13) Fixed or retractable landing gear for a glider.
.
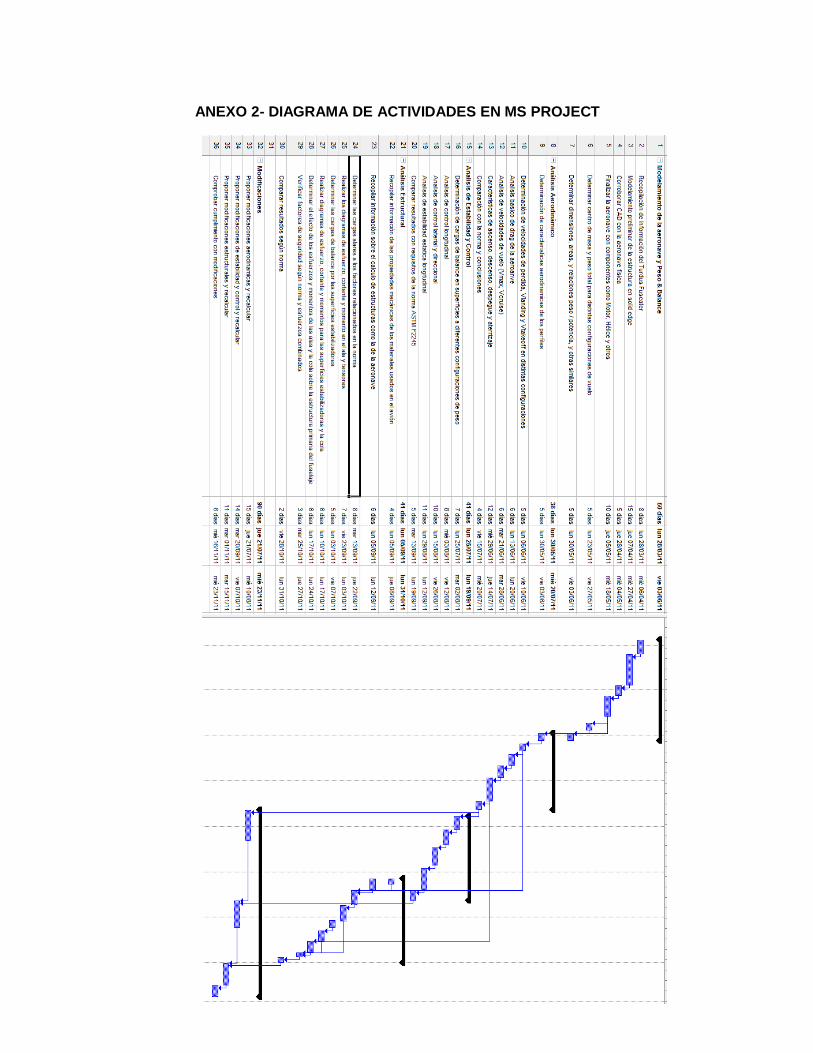
88
ANEXO 2- DIAGRAMA DE ACTIVIDADES EN MS PROJECT
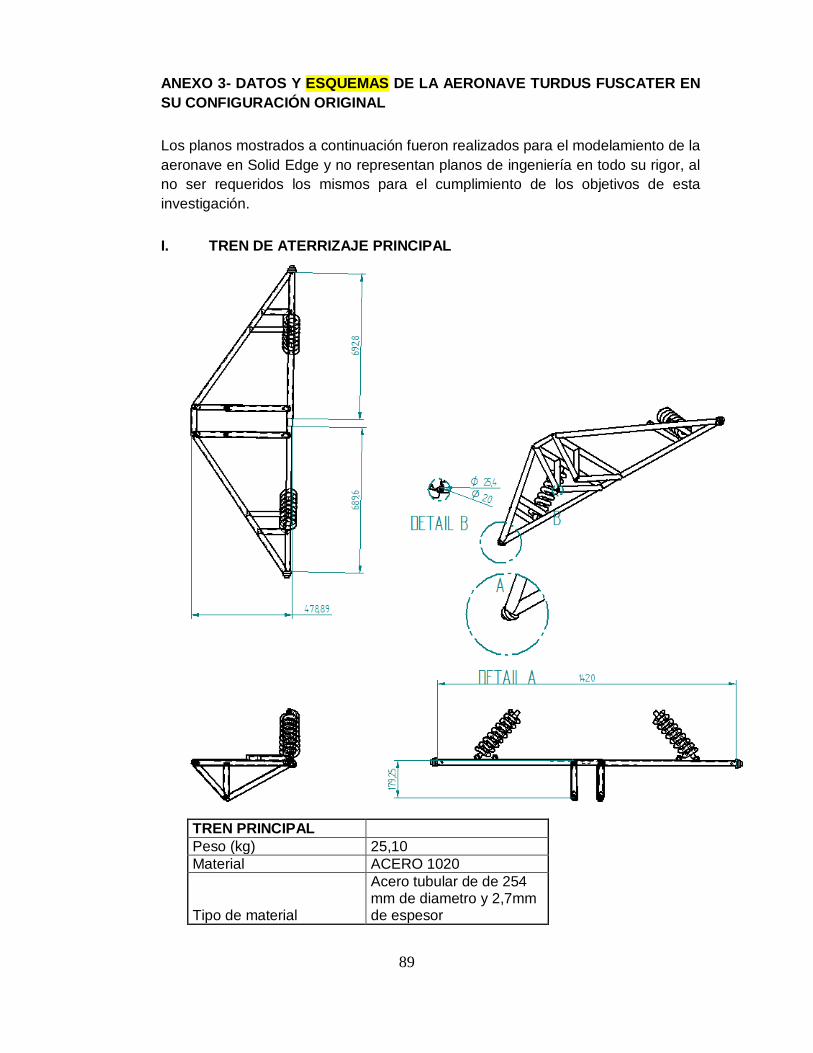
89
ANEXO 3- DATOS Y ESQUEMAS DE LA AERONAVE TURDUS FUSCATER EN
SU CONFIGURACIÓN ORIGINAL
Los planos mostrados a continuación fueron realizados para el modelamiento de la
aeronave en Solid Edge y no representan planos de ingeniería en todo su rigor, al
no ser requeridos los mismos para el cumplimiento de los objetivos de esta
investigación.
I. TREN DE ATERRIZAJE PRINCIPAL
TREN PRINCIPAL Peso (kg) 25,10
Material ACERO 1020
Tipo de material
Acero tubular de de 254 mm de diametro y 2,7mm de espesor
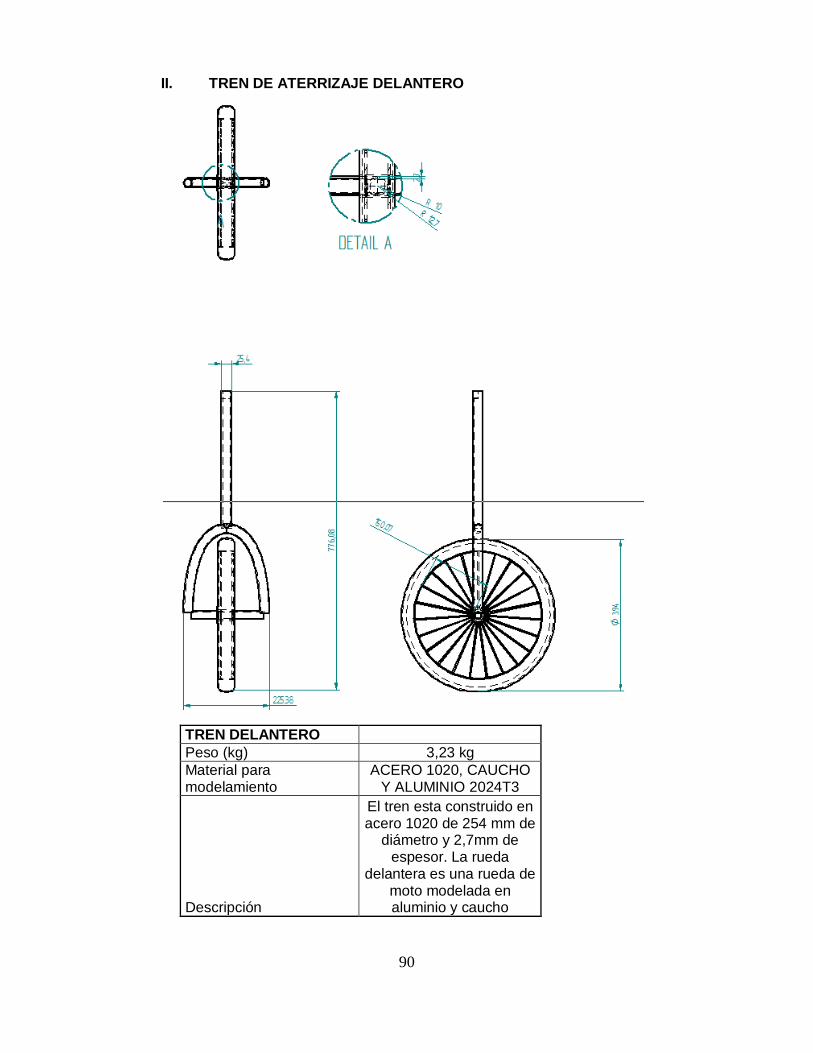
90
II. TREN DE ATERRIZAJE DELANTERO
TREN DELANTERO Peso (kg) 3,23 kg Material para modelamiento
ACERO 1020, CAUCHO Y ALUMINIO 2024T3
Descripción
El tren esta construido en acero 1020 de 254 mm de
diámetro y 2,7mm de espesor. La rueda
delantera es una rueda de moto modelada en aluminio y caucho

91
III. ALAS
ALAS Peso (kg) 108,26 Material para modelamiento ACERO 1020
Descripción
Las alas estan modeladas en tuberia de acero 1020. Las costillas estan
construidas con tubos de 25,4 mm de diametro y 2,7mm de espesor. Los
largeros y las vigas estan construidos en tuberia de acero 1020 de 16,9 mm de
diametro y 1,7 mm de espesor. El soporte superior esta construido con tuberia igual a la de las costillas. Todas las secciones estan soldadas con mediante soldadura
convencional.
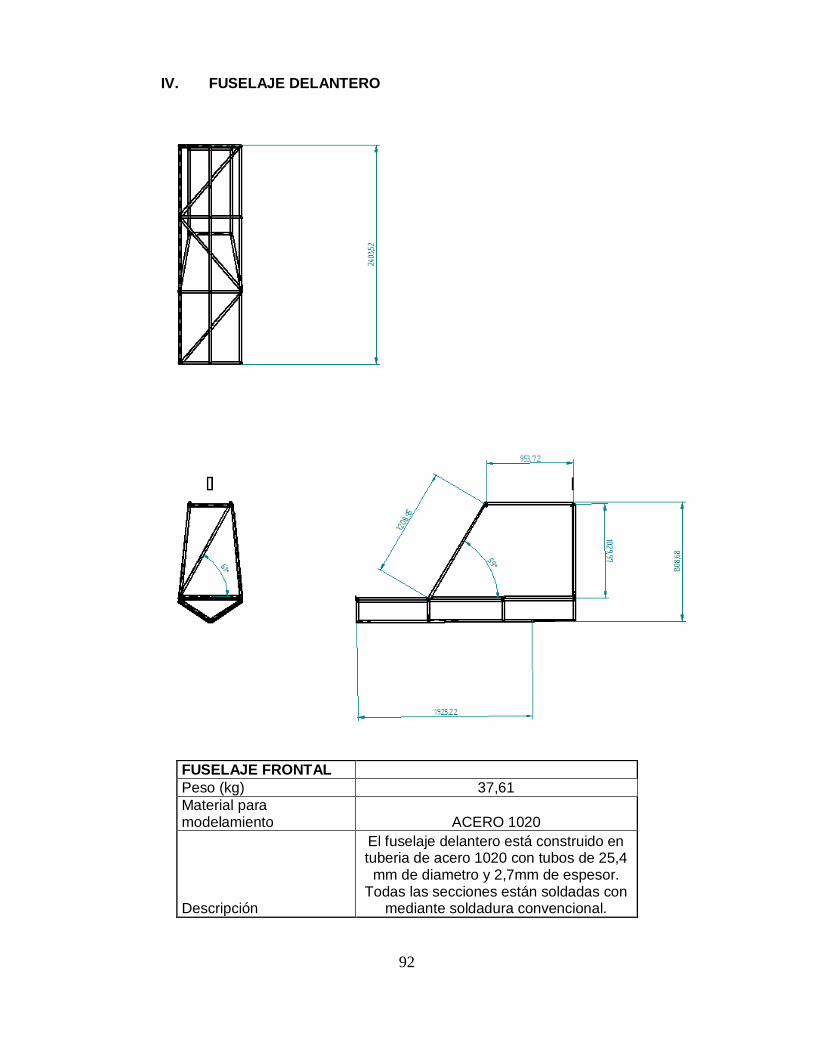
92
IV. FUSELAJE DELANTERO
FUSELAJE FRONTAL Peso (kg) 37,61 Material para modelamiento ACERO 1020
Descripción
El fuselaje delantero está construido en tuberia de acero 1020 con tubos de 25,4
mm de diametro y 2,7mm de espesor. Todas las secciones están soldadas con
mediante soldadura convencional.
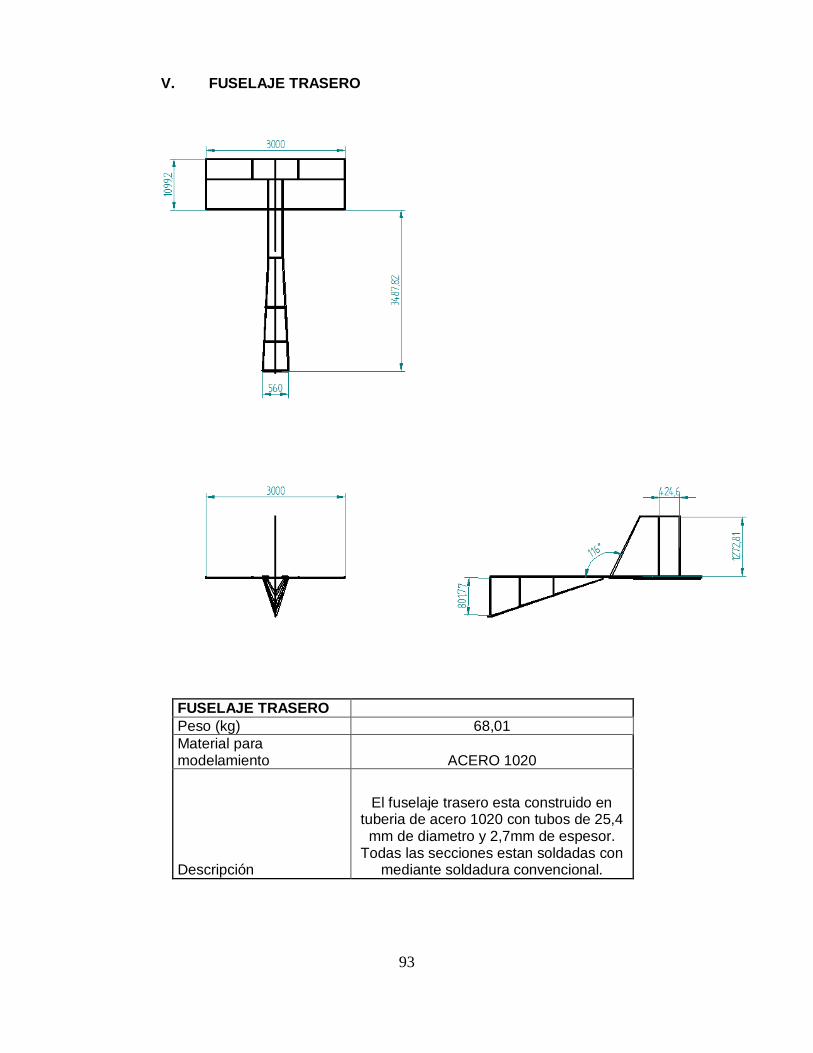
93
V. FUSELAJE TRASERO
FUSELAJE TRASERO Peso (kg) 68,01 Material para modelamiento ACERO 1020
Descripción
El fuselaje trasero esta construido en tuberia de acero 1020 con tubos de 25,4
mm de diametro y 2,7mm de espesor. Todas las secciones estan soldadas con
mediante soldadura convencional.
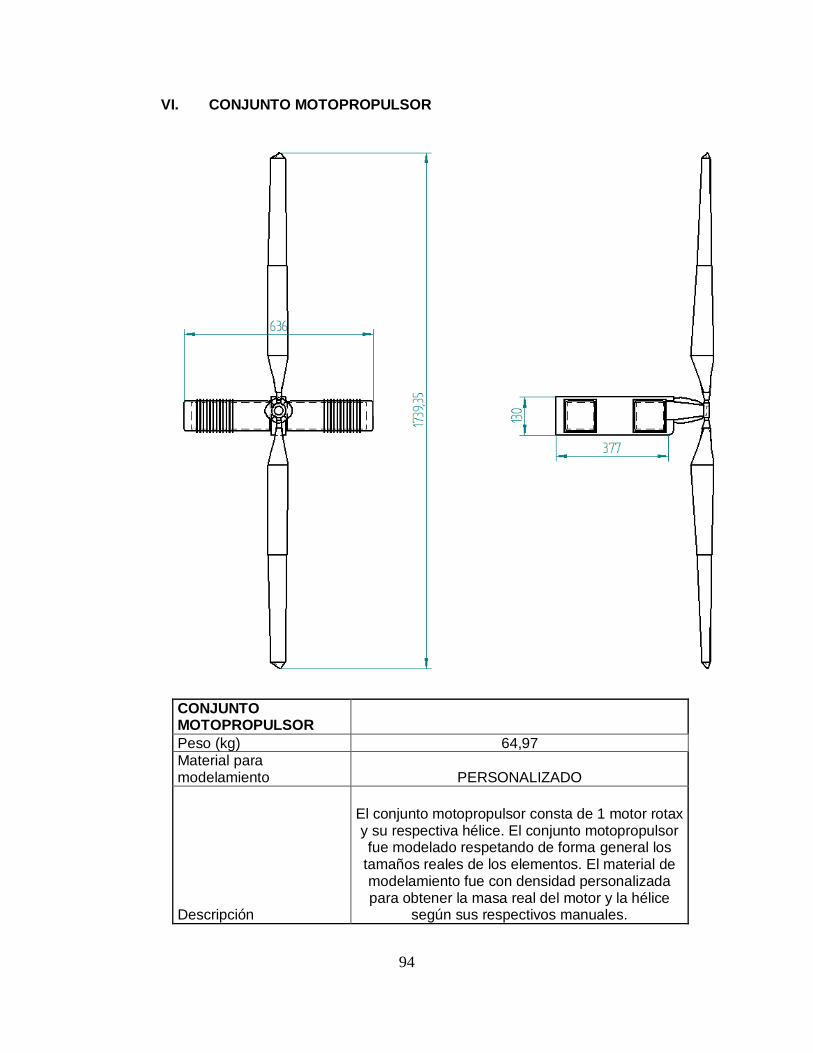
94
VI. CONJUNTO MOTOPROPULSOR
CONJUNTO MOTOPROPULSOR Peso (kg) 64,97 Material para modelamiento PERSONALIZADO
Descripción
El conjunto motopropulsor consta de 1 motor rotax y su respectiva hélice. El conjunto motopropulsor fue modelado respetando de forma general los
tamaños reales de los elementos. El material de modelamiento fue con densidad personalizada para obtener la masa real del motor y la hélice
según sus respectivos manuales.