Resistencia de Materiales - Carlos Esparza
212
CAPÍTULO I ESTADO UNIAXIAL DE ESFUERZOS Y DEFORMACIONES 1.1) Introducción. Hipótesis en Mecánica de Sólidos Deformables 1.1.1) Definiciones Mecánica de Sólidos (Resistencia de Materiales, Mecánica de Sólidos Deformables o Mecánica de Materiales) es la disciplina que estudia, básicamente, las relaciones entre acciones aplicadas y sus efectos en el interior de los sólidos o elementos estructurales. Sólido estructural T Acciones (Generalizadas) T = T final - T inicial Fuerzas concentradas Fuerzas distribuidas Momentos flectores Momentos Torsores Cambios de temperatura Perturbaciones Etc... En respuesta a las acciones aplicadas, el sólido se deforma: Efectos (Comportamiento) Transmisión de cargas (ESFUERZOS) Cambios de geometría (DEFORMACIONES) Configuración Inicial (No Deformada) Configuración Final (Deformada) X Eje para momento torsor Y, Z Ejes para momentos flectores My / Flexión en el plano XZ/ Mz / Flexión en el plano YX/ Z X Eje Normal Y Perturbación (hundimiento de apoyos)
-
Upload
alex-alva-miranda -
Category
Documents
-
view
1.056 -
download
156
Transcript of Resistencia de Materiales - Carlos Esparza

CAPÍTULO I ESTADO UNIAXIAL DE ESFUERZOS Y DEFORMACIONES
1.1) Introducción. Hipótesis en Mecánica de Sólidos Deformables
1.1.1) Definiciones
Mecánica de Sólidos (Resistencia de Materiales, Mecánica de Sólidos Deformables o Mecánica de Materiales) es la disciplina que estudia, básicamente, las relaciones entre acciones aplicadas y sus efectos en el interior de los sólidos o elementos estructurales.
Sólido estructural
T Acciones
(Generalizadas)
T = Tfinal - Tinicial
Fuerzas concentradas Fuerzas distribuidas Momentos flectores Momentos Torsores Cambios de temperatura Perturbaciones Etc...
En respuesta a las acciones aplicadas, el sólido se deforma:
Efectos (Comportamiento)
Transmisión de cargas (ESFUERZOS) Cambios de geometría (DEFORMACIONES)
Configuración Inicial (No Deformada)
Configuración Final (Deformada)
X Eje para momento torsor Y, Z Ejes para momentos flectores My / Flexión en el plano XZ/ Mz / Flexión en el plano YX/
Z
X Eje Normal
Y
Perturbación (hundimiento de apoyos)
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
2
Para estudiar el comportamiento de un sólido estructural es preciso distinguir entre Configuración Inicial y Configuración Deformada. Configuración inicial Geometría y restricciones antes de aplicar las acciones
Configuración Deformada Geometría y restricciones luego de ser aplicadas las acciones. Mecánica de Sólidos o Resistencia de Materiales es también una disciplina técnica relacionada con los Métodos de la Ingeniería que tienen especial interés en los conceptos de RESISTENCIA, RIGIDEZ y ESTABILIDAD de elementos o sistemas estructurales. RESISTENCIA Capacidad de un elemento o de un conjunto de elementos para
contrarrestar acciones sin quebrarse o descomponerse. RIGIDEZ Capacidad de un elemento o de un conjunto de elementos para
oponerse a las deformaciones que le inducen las acciones aplicadas. ESTABILIDAD Capacidad de un elemento o de un conjunto de elementos para
conservar una forma única garantizada por las condiciones del equilibrio. En Mecánica de Sólidos (Resistencia de Materiales) se complementará el estudio de fuerzas iniciado en Estática. Sin embargo, existe una diferencia fundamental.
Sólido rígido (indeformable)
P
Sólido deformable (de la conf. Inicial a
la conf. Final)
P
P
ESTÁTICA RESISTENCIA
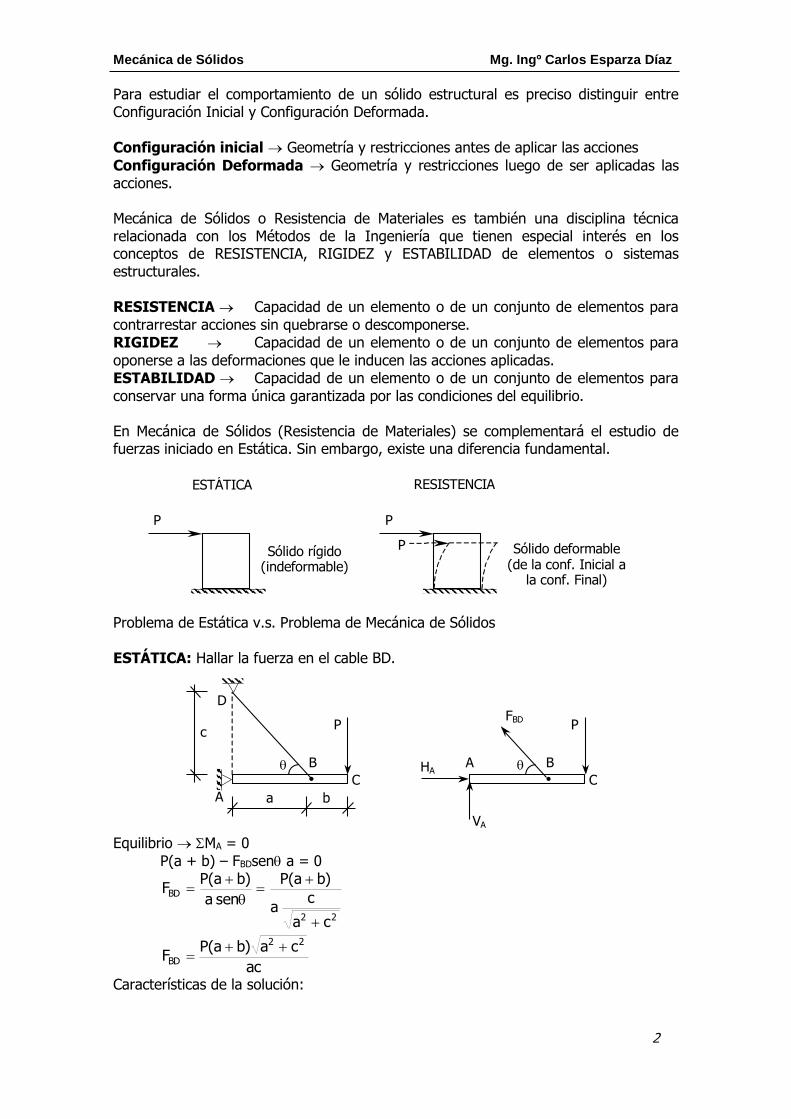
Problema de Estática v.s. Problema de Mecánica de Sólidos ESTÁTICA: Hallar la fuerza en el cable BD.
P
D
A
B
C
a b
P
HA B
C
c FBD
VA
A
Equilibrio MA = 0
P(a + b) – FBDsen a = 0
22
BD
ca
c a
)ba(P
sen a
)ba(PF
ca
ca)ba(PF
22
BD
Características de la solución:

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
3
La solución depende únicamente de las ecuaciones del equilibrio. La solución es INDEPENDIENTE del material del cable. No es necesario conocer las dimensiones transversales del cable.
MECÁNICA DE SÓLIDOS: Calcular el desplazamiento vertical del punto C.
P
D
A
B C
C'
cv = ?
Características (esperadas):
Debe "conocerse" el material del cable Debe conocerse la sección transversal del cable Además de las ecuaciones de equilibrio, se usarán otras que relacionen
FUERZAS, DESPLAZAMIENTOS Y MATERIAL (Ecuaciones Constitutivas).
Existen dos grandes vertientes (enfoques) de estudio en Mecánica de Sólidos:
Analítica Análisis y Cálculo de Esfuerzos y Deformaciones
Experimental Estudio de las Propiedades Mecánicas de los Materiales y Sistemas Estructurales.
El conocimiento y dominio de ambos enfoques, en Ingeniería permite el DISEÑO de elementos o sistemas estructurales, con SEGURIDAD y FUNCIONALIDAD.
SEGURIDAD Transmisión adecuada de las cargas (relacionada con la Resistencia)
P
P
FUNCIONALIDAD Respeto a las condiciones del uso para el que han sido concebidos (relacionada con las Deformaciones).
1.1.2) Hipótesis en Mecánica de Sólidos Deformables
Con la finalidad de simplificar el tratamiento y las ecuaciones que describen el comportamiento de sólidos o sistemas estructurales, es conveniente usar HIPÓTESIS SIMPLIFICATORIAS. Estas han sido validadas analítica y experimentalmente.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
4
Hipótesis Simplificatorias
Sobre la Estructura Interna y Propiedades de los materiales Continuidad Homogeneidad Isotropía
Sobre el Carácter de las Deformaciones Deformaciones pequeñas
(INFINITESIMALES) CONTINUIDAD El material llena totalmente el volumen que ocupa. Se acepta una distribución CONTINUA de materia, en lugar de considerar a los sólidos como un conjunto de partículas discretas (MEDIO CONTINUO).
Medio continuo apropiado para estudiar fenómenos de presión, densidad, etc.
Medio discreto Apropiado para estudiar propiedades electroquímicas, magnéticas probabilísticas, etc
HOMOGENEIDAD Las propiedades del material son iguales en todos los puntos del sólido
Propiedades iguales para puntos diferentes
P Q
Material homogéneo Acero
Material no homogéneo Concreto Armado
ISOTROPÍA Las propiedades del material son iguales en todas las direcciones
Propiedades iguales para elementos de distinta orientación
Existen materiales que no son compatibles con esta hipótesis (la madera).
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
5
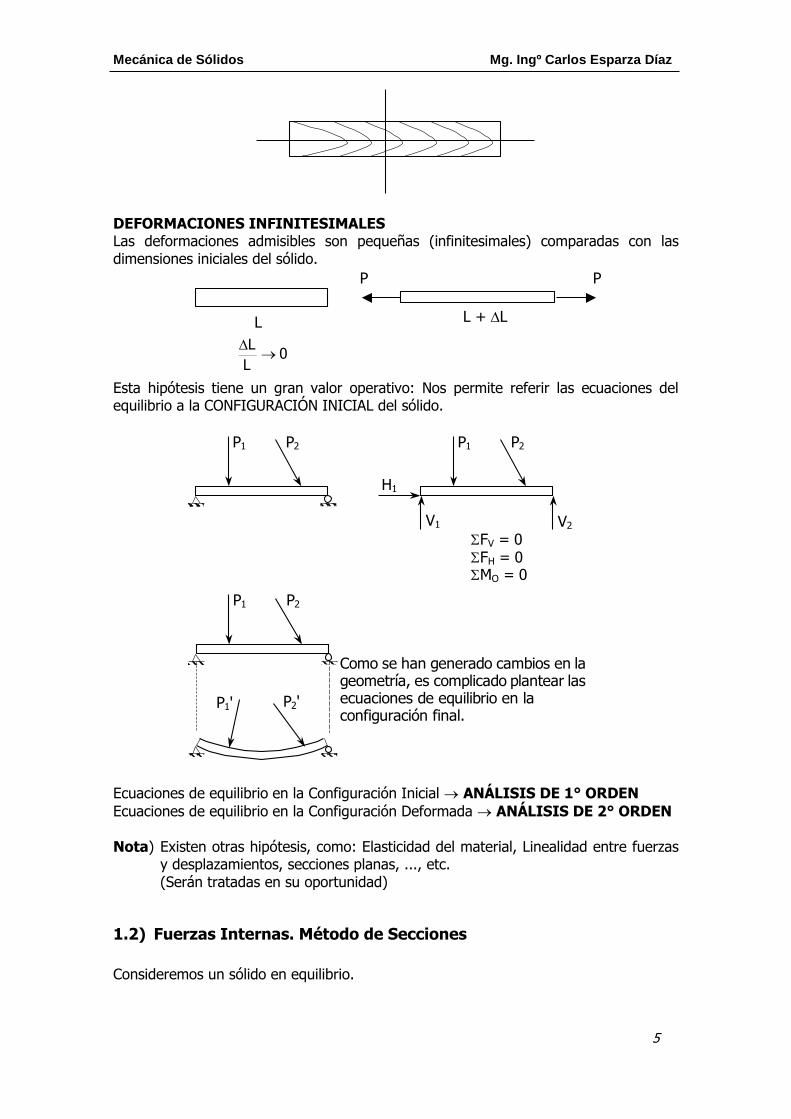
DEFORMACIONES INFINITESIMALES Las deformaciones admisibles son pequeñas (infinitesimales) comparadas con las dimensiones iniciales del sólido.
0L
L
L L + L
P P
Esta hipótesis tiene un gran valor operativo: Nos permite referir las ecuaciones del equilibrio a la CONFIGURACIÓN INICIAL del sólido.
FV = 0 FH = 0 MO = 0
P1 P2 P1 P2
H1
V1 V2
P1 P2
P1' P2'
Como se han generado cambios en la geometría, es complicado plantear las ecuaciones de equilibrio en la configuración final.
Ecuaciones de equilibrio en la Configuración Inicial ANÁLISIS DE 1° ORDEN
Ecuaciones de equilibrio en la Configuración Deformada ANÁLISIS DE 2° ORDEN Nota) Existen otras hipótesis, como: Elasticidad del material, Linealidad entre fuerzas
y desplazamientos, secciones planas, ..., etc. (Serán tratadas en su oportunidad)
1.2) Fuerzas Internas. Método de Secciones
Consideremos un sólido en equilibrio.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
6
Las Fuerzas Internas se manifiestan como FUERZAS DE INTERACCIÓN entre las partículas del material que constituyen el sólido. Cada plano de referencia, separa al sólido en dos porciones.
(I)
F1
F2
F4
F3 (II)
Sección de interés
Plano de corte (imaginario)
Ambas porciones en equilibrio
(I)
F1
F2
F4
F3 (II)
Fuerzas Internas
Garantizan el equilibrio de (I)
Garantizan el equilibrio de (II)
Las fuerzas internas representan la interacción de una parte del sólido con la parte que ha sido (idealmente suprimida). En general, estas fuerzas tienen diferentes magnitudes y sentidos, y cambian al cambiar el plano de referencia. En cada caso, las fuerzas internas deben satisfacer las condiciones del equilibrio de la porción que se considere. ACCIONES INTERNAS Las fuerzas internas en una porción del sólido pueden representarse mediante un
Vector Fuerza V y un Vector Momento M
<> (I)
F1
F2
(I)
M
V
Sólido en equilibrio
F1
F2
F4
F3
Si cortamos al sólido mediante PLANOS IDEALES, se evidencian SISTEMAS DE FUERZAS INTERNAS (para cada plano de corte).
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
7
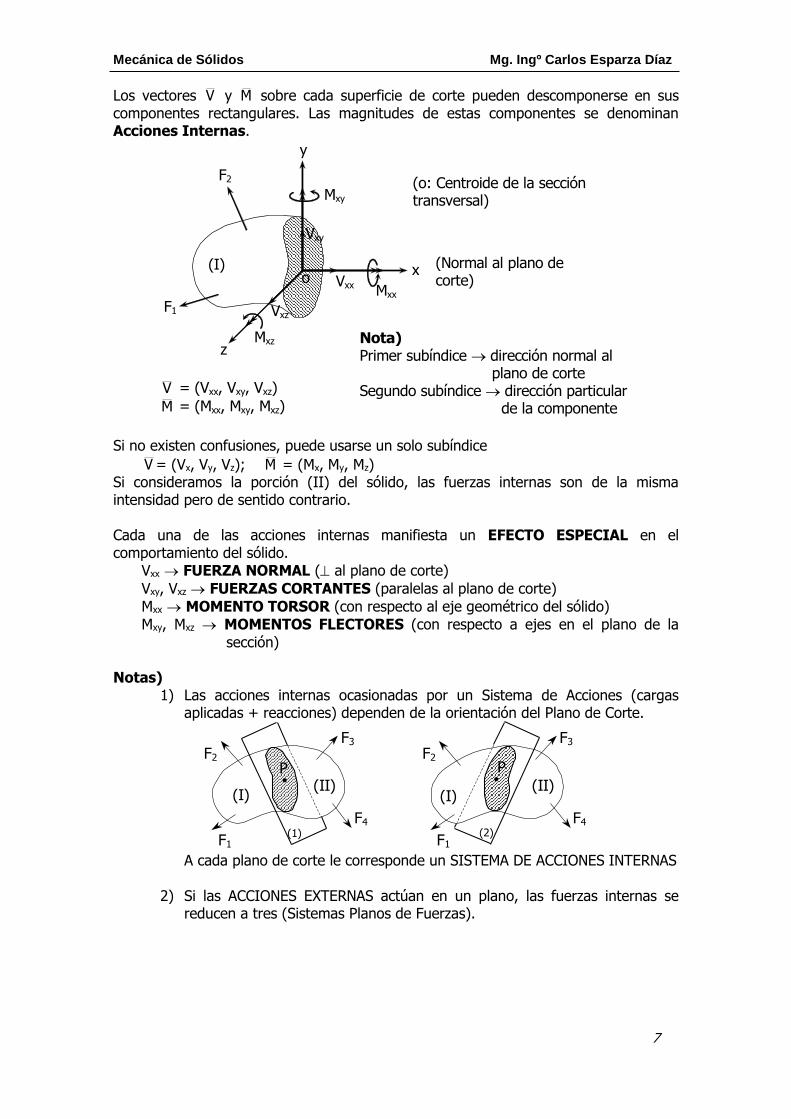
Los vectores V y M sobre cada superficie de corte pueden descomponerse en sus componentes rectangulares. Las magnitudes de estas componentes se denominan Acciones Internas.
(I)
F1
F2
x
z
y
Vxz
Vxx
Vxy
Mxx
Mxz
Mxy
o
(o: Centroide de la sección transversal)
(Normal al plano de corte)
Nota) Primer subíndice dirección normal al
plano de corte Segundo subíndice dirección particular
de la componente
V = (Vxx, Vxy, Vxz)
M = (Mxx, Mxy, Mxz) Si no existen confusiones, puede usarse un solo subíndice
V = (Vx, Vy, Vz); M = (Mx, My, Mz) Si consideramos la porción (II) del sólido, las fuerzas internas son de la misma intensidad pero de sentido contrario. Cada una de las acciones internas manifiesta un EFECTO ESPECIAL en el comportamiento del sólido.
Vxx FUERZA NORMAL ( al plano de corte)
Vxy, Vxz FUERZAS CORTANTES (paralelas al plano de corte)
Mxx MOMENTO TORSOR (con respecto al eje geométrico del sólido)
Mxy, Mxz MOMENTOS FLECTORES (con respecto a ejes en el plano de la
sección) Notas)
1) Las acciones internas ocasionadas por un Sistema de Acciones (cargas aplicadas + reacciones) dependen de la orientación del Plano de Corte.
(I)
F1
F2
F4
F3
(II) P
(1)
(I)
F1
F2
F4
F3
(II)
P
(2)
A cada plano de corte le corresponde un SISTEMA DE ACCIONES INTERNAS
2) Si las ACCIONES EXTERNAS actúan en un plano, las fuerzas internas se
reducen a tres (Sistemas Planos de Fuerzas).
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
8
(Sistema plano N Fuerza Normal de fuerzas) V Fuerza cortante
M Momento Flector
M
F1
F2
1
F1
F2
F4
F3
1
1
1
N
V
3) Las fuerzas internas variarán en intensidad y dirección, según se consideren
distintos planos que pasen por un punto P. Un problema de interés será determinar las VALORES EXTREMOS de las Acciones Internas.
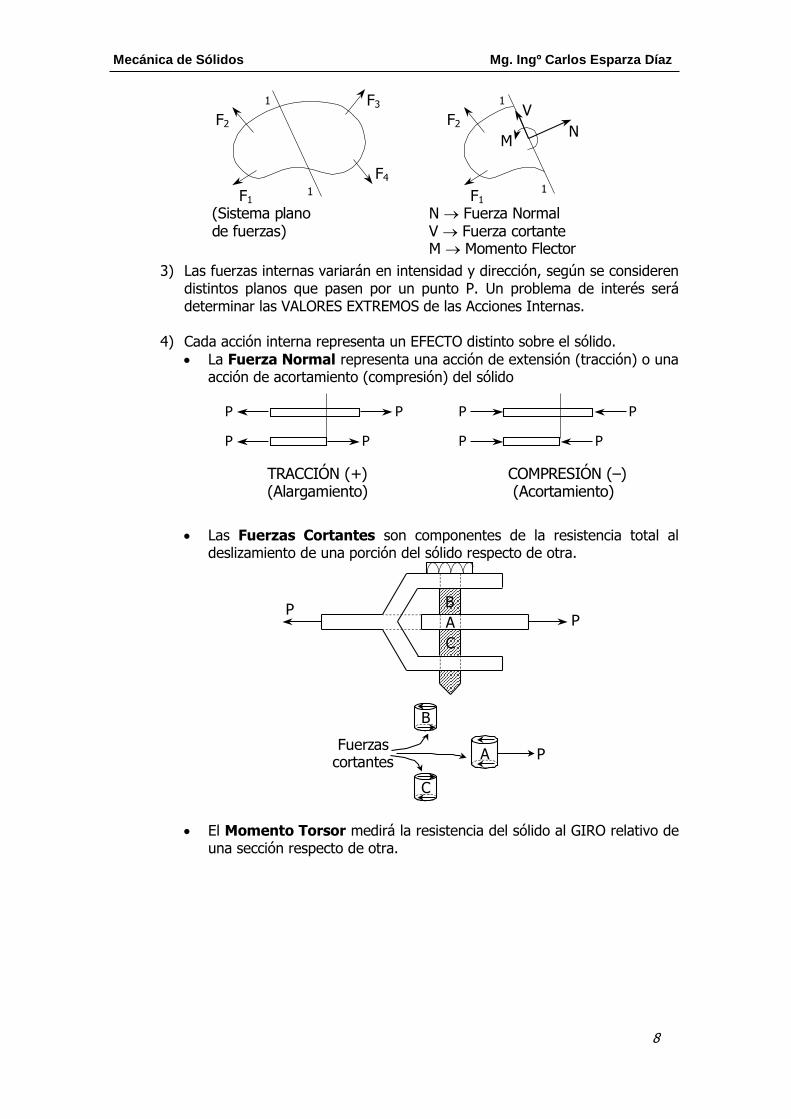
4) Cada acción interna representa un EFECTO distinto sobre el sólido.
La Fuerza Normal representa una acción de extensión (tracción) o una acción de acortamiento (compresión) del sólido
TRACCIÓN (+) COMPRESIÓN (–) (Alargamiento) (Acortamiento)
P P
P P
P P
P P
Las Fuerzas Cortantes son componentes de la resistencia total al deslizamiento de una porción del sólido respecto de otra.
P P
B
C
A
B
A
C
Fuerzas cortantes
P
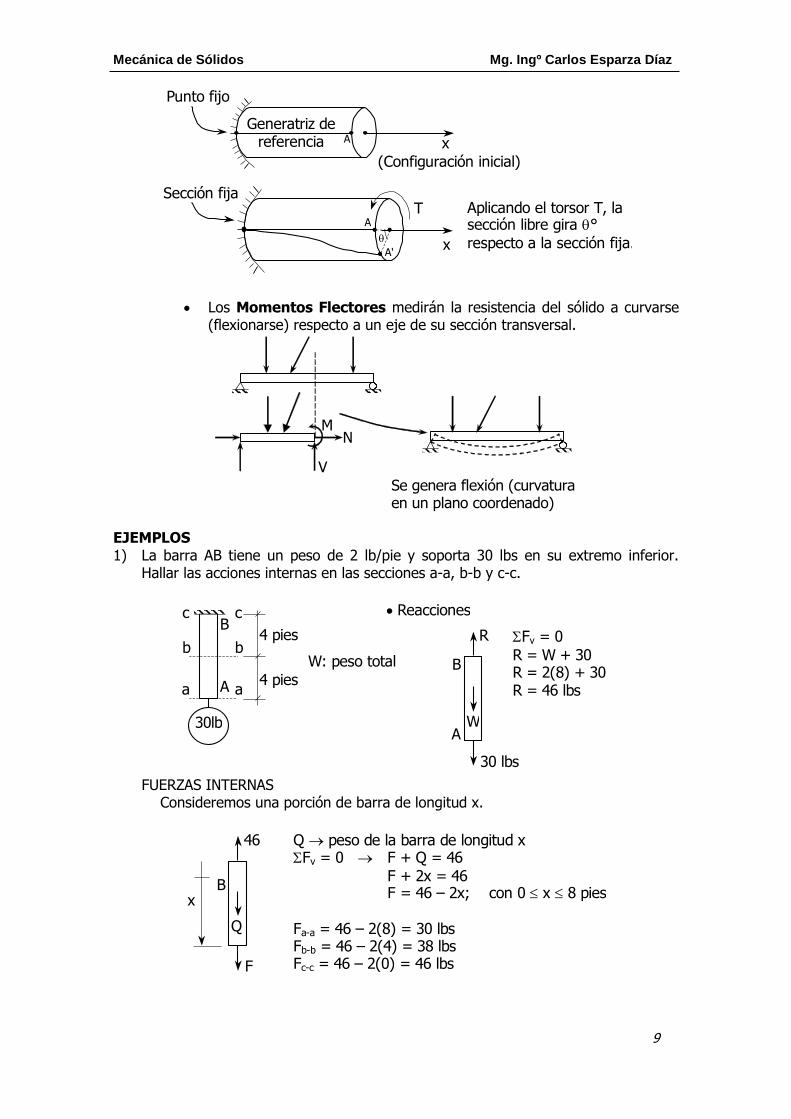
El Momento Torsor medirá la resistencia del sólido al GIRO relativo de una sección respecto de otra.
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
9
x
Generatriz de referencia A
Punto fijo
x
Sección fija
(Configuración inicial)
T A
A'
Aplicando el torsor T, la sección libre gira °
respecto a la sección fija.
Los Momentos Flectores medirán la resistencia del sólido a curvarse (flexionarse) respecto a un eje de su sección transversal.
Se genera flexión (curvatura en un plano coordenado)
M N
V
EJEMPLOS 1) La barra AB tiene un peso de 2 lb/pie y soporta 30 lbs en su extremo inferior.
Hallar las acciones internas en las secciones a-a, b-b y c-c.
B c c
b b
a a
30lb
A
4 pies
4 pies B
A
Fv = 0
R = W + 30 R = 2(8) + 30 R = 46 lbs
Reacciones
W: peso total
W
30 lbs
R
FUERZAS INTERNAS Consideremos una porción de barra de longitud x.
B
Q peso de la barra de longitud x Fv = 0 F + Q = 46
F + 2x = 46 F = 46 – 2x; con 0 x 8 pies
Fa-a = 46 – 2(8) = 30 lbs Fb-b = 46 – 2(4) = 38 lbs Fc-c = 46 – 2(0) = 46 lbs
Q
F
46
x

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
10
Es posible representar la variación de FUERZA AXIAL (NORMAL) mediante un Diagrama denominado DIAGRAMA DE FUERZA AXIAL.
x
+
x
F
Tracción
F = 46 – 2x
30 lbs
46 lbs
2) Graficar el diagrama de FUERZA AXIAL para el sistema representado.
3 m
1 m
3 ton
q = 0
q = 1 ton/m
(de variación lineal)
3 ton
Encontramos q(x)
4 x
q(x)
1
x
)x(q
4
1 q(x) =
4
x
3
FUERZA INTERNA: Primer tramo
0 x < 3
R1
N1
x
3 + R1 = N1
N1 = 3 +x
0dx)x(q
N1 = 3 +x
0dx
4
x
N1 = 3 +8
x2
3
Segundo tramo 3 < x 4
R2
N2
x
3 + R2 = 3 + N2 N2 = R2
N2 =x
0dx)x(q
N2 =x
0dx
4
x
N2 = 8
x2
3
R1 es la resultante de q(x) en el tramo de longitud x

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
11
Función de Fuerza Axial
N =
4x3 ;8
x
3x0 ;8
x3
2
2
3 m
1 m
3 ton
3 (–)
3 ton N
33/8 ton
2 ton
9/8 ton
x
(COMPRESIÓN)
(Notar la discontinuidad en la sección correspondiente a la carga concentrada 3 ton) 3) Hallar las acciones internas en la sección a-a.
45°
a
a
5 m
10 kN
45°
5 m
10 kN
O
M N
V Equilibrio:
FH = 0 02
2V
2
2N
FV = 0 102
2V
2
2N (*)
M0 = 0 M + (10)(5) = 0
Resolviendo el sistema (*) tenemos: N = 5 2 kN
V = 5 2 kN
M = – 50 kN – m
(Indica que el momento M actúa en sentido contrario al supuesto)
10 kN
50 kN-m
kN 25
kN 25

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
12
4) Determinar las fuerzas internas en la sección 1-1 del sistema representado.
1
1
a
a
x
z
y
P 1/4 de circunferencia
a
x
z
y
P
d2
d1 r
s Ms
Mr
normal en c c
Vx
tangente en c
Equilibrio: Fx = 0 P + Vx = 0 . . . . (i)
Mrc = 0 Mr – Pd2 = 0 . . . . (ii)
Msc = 0 Ms + Pd1 = 0 . . . . (iii)
d2 = a sen; d1 = a – a cos = a(1 – cos)
P + Vx = 0 (i)
Mr – P a sen = 0 . . . . (ii)
Ms + P a(1 – cos) = 0 . . . . (iii)
De (i) Vx = – P (Fuerza cortante)
De (ii) Mr = P a sen (Momento flector)
De (iii) Ms = – P a(1 – cos) (Momento torsor) 5) Considerando que la carga distribuida varía linealmente desde q = 3 ton/m, hasta
q = 0, graficar el diagrama de fuerza axial en el sistema representado.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
13
2 m
q = 0
q = 3 ton/m
1 m
2 ton
Reacción
Q Resultante de la distribución q
R
Q
2
Equilibrio: R = Q + 2 . . . . (1)
q = 0
q = 3 ton/m
x
3
3–x
q(x) x3
)x(q
3
3
q(x) = 3 – x
dx q
dQ = qdx
LqdxQ
3
0dx)x3(Q Q = 4.5 ton
Reemplazando en (1) R = 4.5 + 2 R = 6.5 ton
F1
FUERZA AXIAL
Tramo 0 x 2 Q1 + F1 = 6.5 F1 = 6.5 – Q1
F1 = 6.5 – x
0dx)x(q
F1 = 6.5 – x
0dx)x3(
F1 = 6.5 +
x
0
2)x3(2
1
F1 = 6.5 + 21 (3 – x)2 –
21 (3)2
F1 = 2 + 21 (3 – x)2
q(x)
x
6.5 ton
Q1
Tramo 2 x 3
F2
x
6.5
Q2
6.5 = Q2 + 2 + F2 F2 = 6.5 – 2 – Q2
F2 = 4.5 – x
0dx)x(q
F2 = 4.5 – x
0dx)x3(
F2 = 21
(3 – x)2
2
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
14
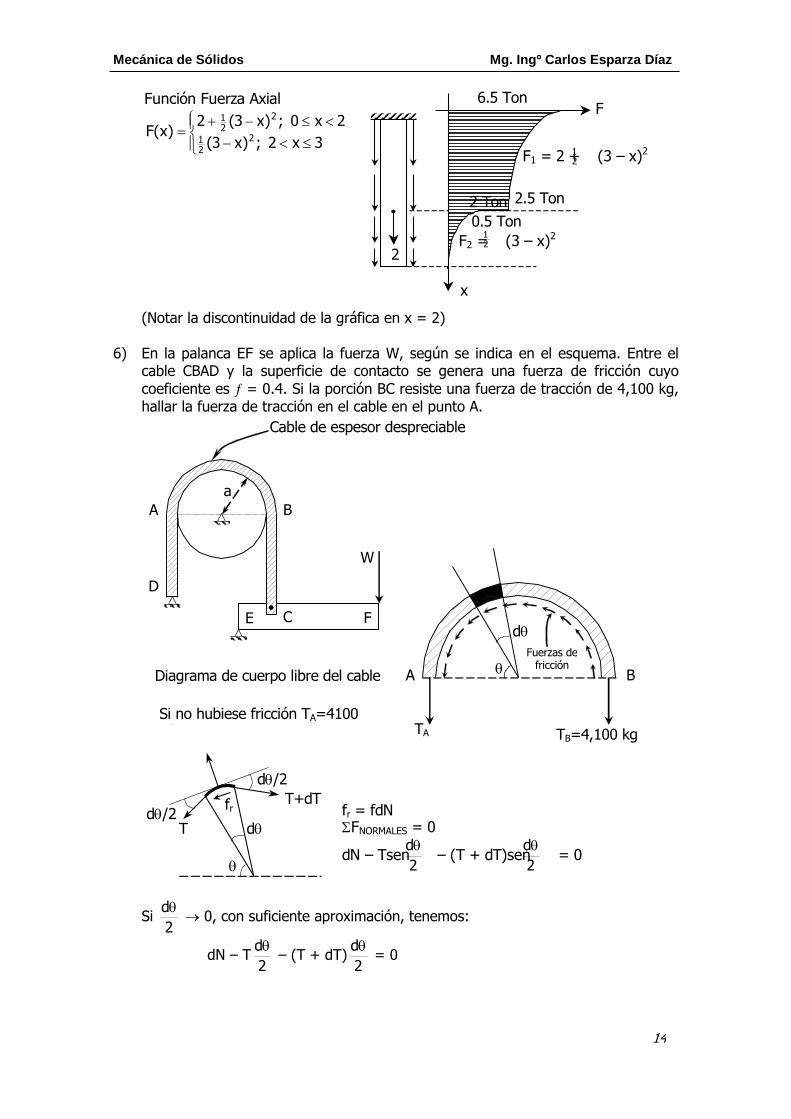
Función Fuerza Axial
3 x 2 ;)x3(
2 x 0 ;)x3(2)x(F
2
21
2
21
F2 = 21
(3 – x)2 2
0.5 Ton
2 Ton 2.5 Ton
F1 = 2 + 21 (3 – x)2
x
F
6.5 Ton
(Notar la discontinuidad de la gráfica en x = 2)
6) En la palanca EF se aplica la fuerza W, según se indica en el esquema. Entre el
cable CBAD y la superficie de contacto se genera una fuerza de fricción cuyo
coeficiente es = 0.4. Si la porción BC resiste una fuerza de tracción de 4,100 kg, hallar la fuerza de tracción en el cable en el punto A.
Cable de espesor despreciable
E
D
A
a
B
C F
W
Diagrama de cuerpo libre del cable A B
TB=4,100 kg TA
d
Fuerzas de fricción
Si no hubiese fricción TA=4100 KhKg.a
d
T+dT
T
fr d/2
d/2
fr = fdN FNORMALES = 0
dN – Tsen2
d – (T + dT)sen
2
d = 0
Si 2
d 0, con suficiente aproximación, tenemos:
dN – T2
d – (T + dT)
2
d = 0

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
15
dN – T2
d – T
2
d + dTd
2
1 = 0
Considerando únicamente diferenciales de 1er orden:
Td
dN
. . . . (i)
Ftang = 0
(T + dT)cos2
d– r – Tcos
2
d = 0
Si 2
d 0 cos
2
d 1, luego
T + dT – T – dN = 0
dN
dT . . . . (ii)
De (i) y (ii) obtenemos:
dTTd
Separando las variables:
dT
dT
Integrando ambos lados:
LnT = + k
T = e + k
T = e ek
T = K e . . . . (iii) (Denominada ecuación de las poleas)
Determinamos K: para = es T = TB = 4,100 kg
4,100 = K e0.4 K = 1,166.9
Reemplazando en (iii) T = 1,166.9 e0.4
Para el punto A: = 0 TA = 1,166.9 e0.4(0)
TA = 1,166.9 kg 7) La barra homogénea representada pesa W, y descansa sobre un plano horizontal
liso. Determinar las fuerzas internas en una sección genérica definida por el .

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
16
P P
r
Semicircunferencia
R1 + R2 = W Wr – R22r = 0 R1 = R2 = W/2
P P W
R1 R2
Reacciones
Peso unitario r
Wq
G peso de la porción AC G = qr
G =
rr
W
WG
rsen A
P
W/2
G
V N
M
/2–
C
r
( centroide del arco AC)
Fvert = 0
Vsen + Nsen
2+
W
2
W = 0
V sen + Ncos = –
W
2
W . . . (i)
Fhoriz = 0
Vcos – Ncos
2– P =0
Vcos – Nsen = P . . . . (ii)
Mc = 0
M + P r sen –2
W(r – r cos) + G(
sen r – r cos) = 0
M = – P r sen +2
Wr(1 – cos) –
Wr(sen – cos) . . . (iii)
Resolviendo simultáneamente (i) y (ii) obtenemos V y N:
N = (
W –
2
W) cos – P sen
V = (
W –
2
W) sen + P cos
De (iii)
M = – P r sen +2
Wr(1 – cos) –
Wr(sen – cos)
8) Un pilote es enterrado por acción de una fuerza externa F = 100 klb. Una fuerza
de fricción (klb/pie) se opone a la fuerza F, siendo su intensidad proporcional al

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
17
cuadrado de la distancia medida desde la superficie superior, y es nula en ella. Determinar las fuerzas internas en Z = 15 pies y en Z = 30 pies.
F=100 klb
Equilibrio
30 pies
Z
100 klb
Resultante de la fricción
= kZ2
L
dZ100
30
0
2dZkZ100
90
1k
3
Zk100
30
0
3
Luego: = 90
1Z2
Fuerzas Internas
100
Q: Resultante de la fricción
(en la altura Z)
N + Q = 100 N = 100 – ZdZ
N = 100 – Z
0
2dZZ90
1
N = 100 – 270
Z3
N
Z
NZ=15 = 100 – 270
1(15)3 = 86.5 klb
NZ=30 = 100 – 270
1(30)3 = 0 klb
N = 100 – 270
Z3
–
N
Z
100 klb
COMPRESIÓN
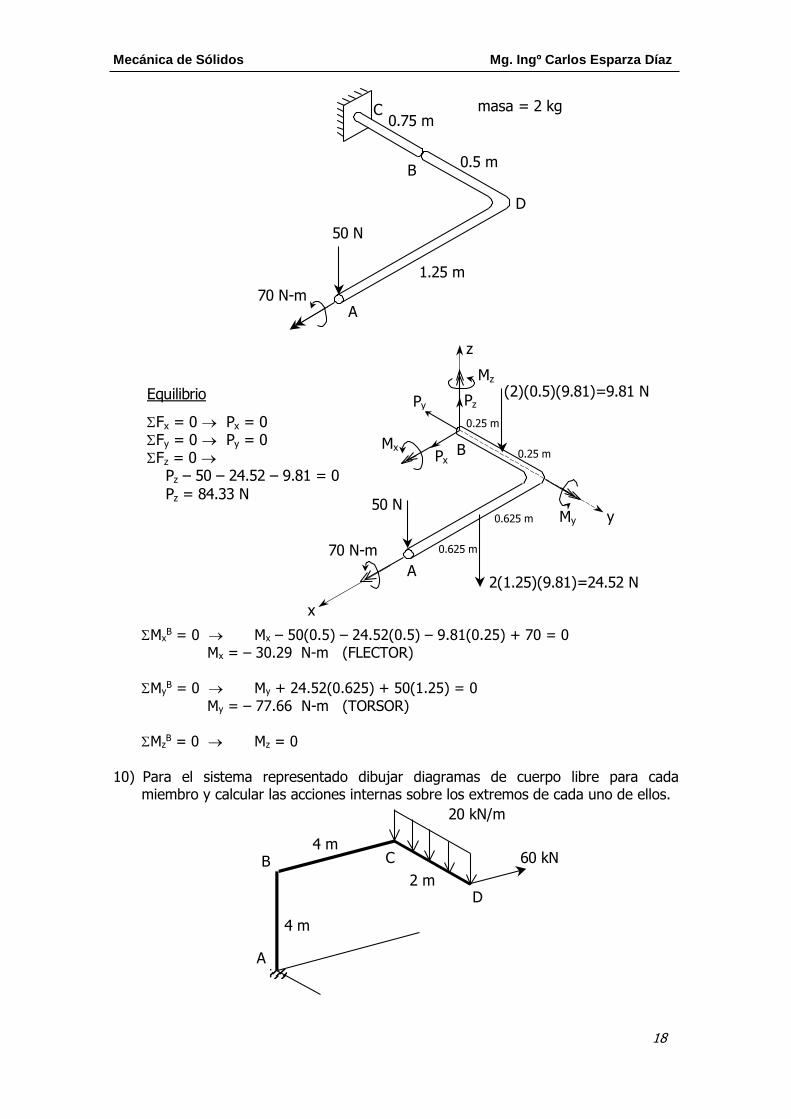
9) Determinar las acciones internas que actúan en la sección B del tubo
representado. El tubo tiene una masa de 2 kg/m y está sujeto a una fuerza vertical de 50 N y a un momento de torsión de 70 N-m en su extremo libre A.
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
18
C 0.75 m
0.5 m
D
masa = 2 kg
B
1.25 m
50 N
A 70 N-m
0.25 m
B
0.625 m
50 N
A
70 N-m
x
0.625 m
2(1.25)(9.81)=24.52 N
0.25 m
(2)(0.5)(9.81)=9.81 N Pz
Mz
z
Py
Px Mx
y My
Equilibrio
Fx = 0 Px = 0 Fy = 0 Py = 0 Fz = 0 Pz – 50 – 24.52 – 9.81 = 0
Pz = 84.33 N
Mx
B = 0 Mx – 50(0.5) – 24.52(0.5) – 9.81(0.25) + 70 = 0 Mx = – 30.29 N-m (FLECTOR)
MyB = 0 My + 24.52(0.625) + 50(1.25) = 0
My = – 77.66 N-m (TORSOR)
MzB = 0 Mz = 0
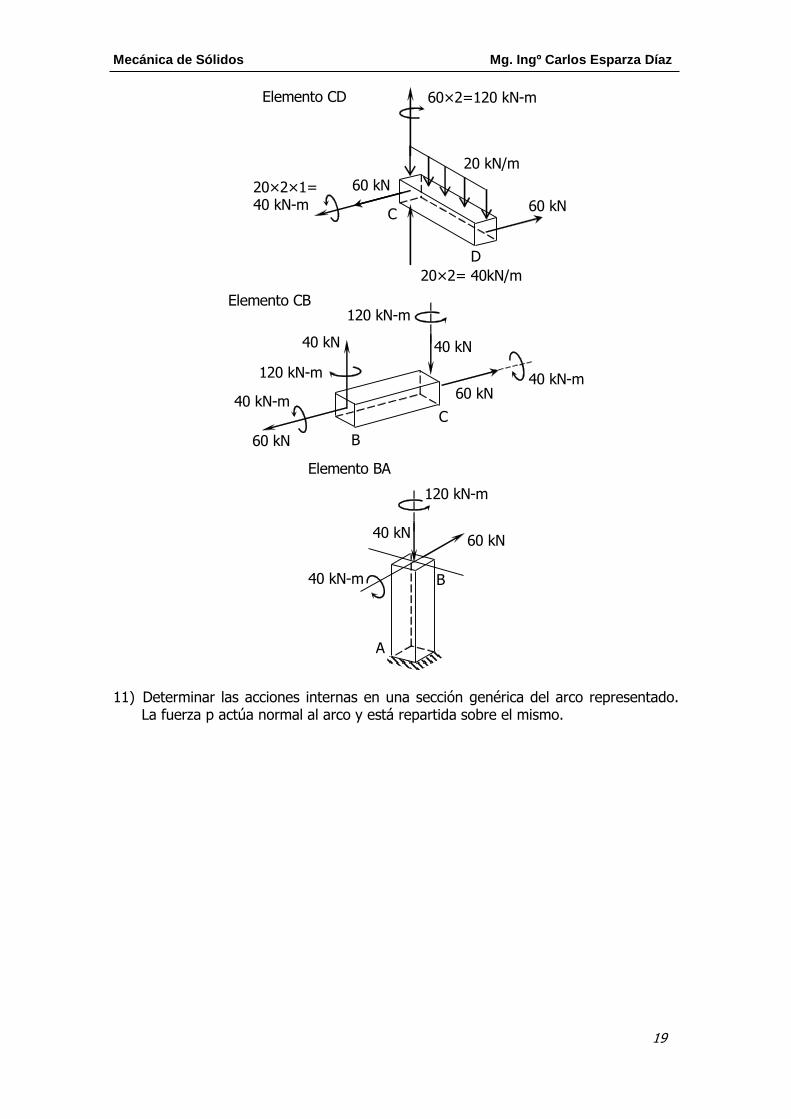
10) Para el sistema representado dibujar diagramas de cuerpo libre para cada
miembro y calcular las acciones internas sobre los extremos de cada uno de ellos.
60 kN
20 kN/m
A
B C
D
2 m
4 m
4 m
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
19
60 kN
20 kN/m
60 kN
D
C
20×2×1= 40 kN-m
60×2=120 kN-m
20×2= 40kN/m
Elemento CD
40 kN-m
B
C
Elemento CB
60 kN
40 kN
120 kN-m
40 kN
120 kN-m
40 kN-m
60 kN
B
Elemento BA
40 kN
120 kN-m
40 kN-m
A
60 kN
11) Determinar las acciones internas en una sección genérica del arco representado.
La fuerza p actúa normal al arco y está repartida sobre el mismo.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
20
Fhoriz = 0
Vcos + prcos2
– Ncos(2
– ) = 0
Vcos – Nsen = – prcos2
. . . . (*)
B A
r
p
0
r
0
V N
M
B
c
p
2
-
/2
r
0
V N
M
B
c
pr d
/2
r
Fvert = 0 V sen + N sen(/2 – ) + pr sen2
= 0
® V sen + N cos() = – pr sen2
. . . . (**)
Mc = 0 M + prd = 0 M = – prr sen2
. . . . (***)
Resolviendo el sistema (*), (**), (***) obtenemos:
V = – pr cos2
N = pr sen2
M = – pr2 sen2
12) El sistema representado se encuentra en equilibrio. Determinar expresiones para
las fuerzas internas en cualquier sección de la viga sumergida.
6 Ton
1.5 m 3.0 m 1.5 m 3.0 m
2 Ton/m

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
21
6 Ton 2 Ton/m
r
A B C D
E
Fvert = 0
9r = 6 + 2(3) r =3
4 ton/m
Reacciones
V
r
A N
A)desde(
5.1x0
x3
2
2
xx
3
4M
x3
4V
0N
2
Tramo AB
M
x
02
)5.1x()5.1x(
3
4
2
xx2M
0x2)x5.1(3
4V
0N
Tramo BC
3
4 Ton/m
V
A N
M
x 1.5 m
2 Ton/m
B) (desde
3x0
)5.1x(3
2xM
)x5.1(3
4x2V
0N
22
B
02
)x5.4()x5.4(
3
4)x5.1(6M
06)x5.4(3
4V
0N
Tramo CD
C) (desde
5.1x0
)x5.1(6)x5.4(3
2M
)x5.4(3
46V
0N
2
3.0 m
3
4
V
A N
M
x 1.5 m
2 Ton/m
B C

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
22
02
xx
3
4M
0x3
4V
0N
Tramo ED
E) (desde
3x0
x3
2M
x3
4V
0N
2
V
N
M
x
E
13) Encontrar ecuaciones para las fuerzas internas en cualquier sección de la viga
representada.
y
0
L
x
y=kx2
0
R1 R2
Reacciones
Fvert = 0 R1 + R2 = L
0ydx
R1 + R2 = 3L3
k . . . . (i)
MO = 0 R2L – L xdA = 0
R2L – L
0ydx x = 0 R2L –
L
0
2dxx k x = 0
R2L – 4
kL4 = 0 . . . . (ii)
De (i) y (ii): R1 = k L3/12 R2 = k L3/4

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
23
Fuerzas Internas
x
3L12
k V
N
M
0x4
1xkx
3
1xL
12
kM
0xkx3
1L
12
kV
0N
23
23
Lx0
x12
kxL
12
kM
L12
kx
3
kV
0N
43
33
Gx
Área = ab3
1
a
CG b
L4
3xG
Parábola de 2do grado
14) Una viga de 40 pies de longitud se encuentra simplemente apoyada y cargada
sobre dos planos coordenados, según se indica. Determinar las acciones internas en cualquier sección normal como funciones de x.
y
z
340 lb/pie
10 lb/pie x
y
A
10 lb/pie
x
PLANO XY
B
RA RB RA = RB = 200 lb

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
24
A
10 lb/pie
Vxx
200 lb Vxy
x
Mxz Vxx = 0 Vxy + 200 – 10x = 0
0x2002
xx10Mxz
Vxx = 0 (Normal) Vxy = 10x – 200 (Cortante)
Mxz = 200x – 5x2 (Flector)
340 pie
lb
A
z
B
R'A R'B
x
PLANO ZX
R'A + R'B = 21 (340)(40)
0)40)()(40)(340()40('R32
21
A
R'A = 4,533.33 lb R'B = 2,266.67 lb
Resolviendo el sistema, tenemos:
340
A
t
4,533.33 lb
Mxy
V'xx
Vxz
x
x40
t
40
340
)x40(2
17t (lb/pie)
340 t
x 40 – x
Vxz + 4,533.33 – 0.5(340 + t)x = 0
Vxz = 0.5x[340 + 2
17(40 – x)] – 4,533.33 (CORTANTE)
Mxy + t x2
x +
2
1x (340 – t)
3
2x – 4,533.33 x = 0
Mxy = 4,533.33 x – 2
x2
(2
17)(40 – x) –
6
x2
[340 – 2
17(40 – x)] (FLECTOR)
y
z
10 lb/pie
x
340 lb/pie
Mxz
Vxy
Vxz
Mxy
Nxx=0
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
25
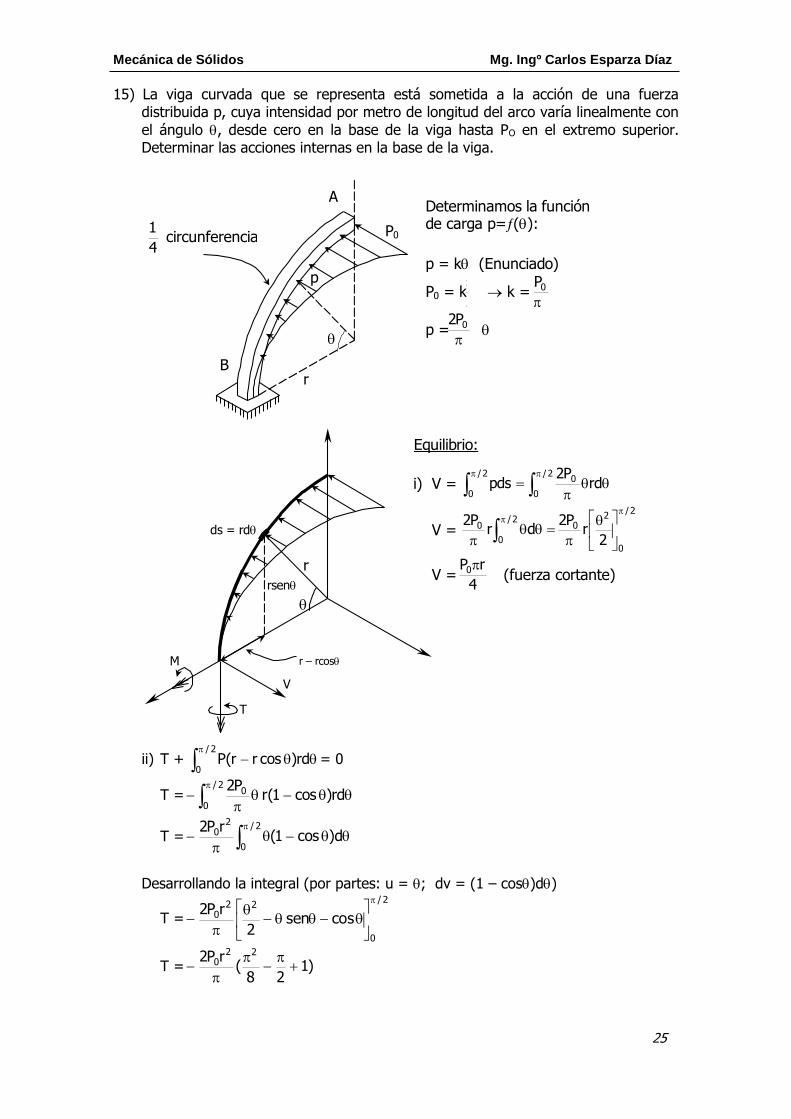
15) La viga curvada que se representa está sometida a la acción de una fuerza distribuida p, cuya intensidad por metro de longitud del arco varía linealmente con
el ángulo , desde cero en la base de la viga hasta PO en el extremo superior. Determinar las acciones internas en la base de la viga.
A
B
P0
p
r
4
1 circunferencia
Determinamos la función de carga p=():
p = k (Enunciado)
P0 = k2
k =
0P2
p =
0P2
Equilibrio:
i) V =
2/
0
02/
0rd
P2pds
V =
2/
0
20
2/
0
0
2r
P2dr
P2
V = 4
rP0 (fuerza cortante)
r
rsen
r – rcos
ds = rd
M
T
V
ii) T +
2/
0rd)cosrr(P = 0
T =
2/
0
0 rd)cos1(r P2
T =
2/
0
20 d)cos1(rP2
Desarrollando la integral (por partes: u = ; dv = (1 – cos)d)
T =
2/
0
220 cossen
2
rP2
T = )128
(rP2 22
0

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
26
(Momento Torsor) T = )2
14
(rP 20
(sentido contrario al
supuesto)
iii) M + 2π/
0rdθsenPr = 0
M =
dsenrP2 2
2π/
0
0
M =
2π/
0
20 dsenrP2
M = 2/0
20 cossenrP2
(Momento flector) M = 20 rP2
(sentido contrario al supuesto)
16) Dos barras iguales, rígidas, de peso G cada una y de longitud 2L, están articuladas
en su punto medio. Sus extremos inferiores descansan sobre un plano liso horizontal, y sus extremos superiores están unidos por intermedio de un cable. En las barras se apoya un cilindro de radio r y peso Q, según se indica en el esquema. Hallar la fuerza de tracción que se desarrolla en el cable.
L
L
L
L
o
i) Equilibrio (total)
FV = 0
Q + 2G = 2S
2
QGS . . . . (i)
(S: reacciones verticales porque el piso no tiene fricción).
2G
S S
Q
ii) Calculamos la presión que el cilindro ejerce sobre las barras.
FV = 0 2Rsen = Q
sen2
QR . . . . (ii)
Sea x la distancia (sobre las barras) desde el punto O hasta el punto de contacto:
x
rtan
tan
rx . . . . (iii)
Q
o
R R
x
iii) Equilibrio (de cada barra).
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
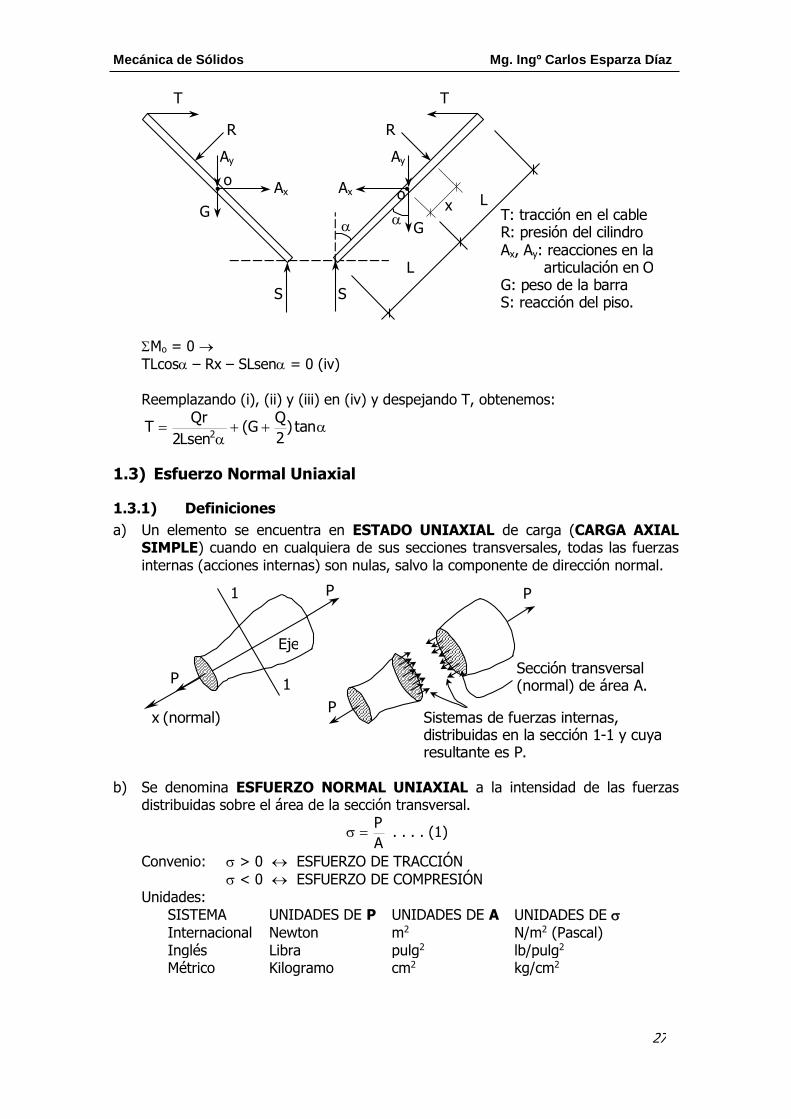
27
T: tracción en el cable R: presión del cilindro Ax, Ay: reacciones en la articulación en O G: peso de la barra S: reacción del piso.
T
R
Ax
G
o
Ay
S
R
Ax
G
o
T
Ay
S
x
L
L
Mo = 0
TLcos – Rx – SLsen = 0 (iv)
Reemplazando (i), (ii) y (iii) en (iv) y despejando T, obtenemos:
tan)2
QG(
Lsen2
QrT
2
1.3) Esfuerzo Normal Uniaxial
1.3.1) Definiciones
a) Un elemento se encuentra en ESTADO UNIAXIAL de carga (CARGA AXIAL SIMPLE) cuando en cualquiera de sus secciones transversales, todas las fuerzas internas (acciones internas) son nulas, salvo la componente de dirección normal.
1
1
Eje
P
P
x (normal)
Sección transversal (normal) de área A.
Sistemas de fuerzas internas, distribuidas en la sección 1-1 y cuya resultante es P.
P
P
b) Se denomina ESFUERZO NORMAL UNIAXIAL a la intensidad de las fuerzas
distribuidas sobre el área de la sección transversal.
A
P . . . . (1)
Convenio: > 0 ESFUERZO DE TRACCIÓN
< 0 ESFUERZO DE COMPRESIÓN Unidades:
SISTEMA UNIDADES DE P UNIDADES DE A UNIDADES DE Internacional Newton m2 N/m2 (Pascal) Inglés Libra pulg2 lb/pulg2 Métrico Kilogramo cm2 kg/cm2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
28
De uso obligatorio es el SISTEMA INTERNACIONAL 1 kilo Pascal = 103 Pascales 1 Mega Pascal = 106 Pascales 1 Giga Pascal = 109 Pascales
Notas)
1) Mediante la ecuación (1) A
P se ha definido el Esfuerzo Normal Uniaxial en
VALOR PROMEDIO, aceptándose que la carga axial P se reparte UNIFORMEMENTE en el área transversal A.
2) Se denomina ESFUERZO NORMAL en un punto del área transversal, al valor:
dA
dP . (2)
3) La ecuación (1) supone una distribución uniforme del esfuerzo normal, mientras
que la ecuación (2) NO presupone tal distribución.
A partir de la ecuación (1) PRISMA DE ESFUERZOS
A partir de la ecuación (2) SÓLIDO DE ESFUERZOS (El Volumen del Sólido de Esfuerzos es igual a la intensidad de la carga P)
1.3.2) Propiedades del Esfuerzo Normal ()
a) La ecuación de equilibrio estático se expresa dA P)A( . Es la única información
sobre la distribución del esfuerzo normal. La REAL DISTRIBUCIÓN del esfuerzo normal es un problema estáticamente indeterminado.
b) La distribución uniforme del esfuerzo normal uniaxial SÓLO PUEDE EXISTIR SI LA RESULTANTE DE LAS FUERZAS APLICADAS pasa por el CENTROIDE de la SECCIÓN TRANSVERSAL.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
29
Debemos demostrar que C es el CENTROIDE del área transversal A, siempre que
sea uniforme. En un elemento de área dA, la fuerza normal asociada es dP = dA.
Ecuaciones del equilibrio:
Fz = 0 dA P)A( . . . . (*)
My = 0 )A(
)dA (xPa . . . . (**)
Mx = 0 )A(
)dA (yPb . . . . (***)
Si la distribución de esfuerzos es uniforme, es de valor constante. Las ecuaciones (*), (**), (***) pueden escribirse:
P = A
)A(dA xPa
)A(dA yPb
De donde, eliminando P, obtenemos: dA xAa)A(
dA yAb)A(
y finalmente: A
dA xa
)A( y
A
dA yb
)A(
Los valores encontrados para las coordenadas a, b definen al punto C como el CENTROIDE del área de la sección transversal. Notas) 1) Sólo puede presuponerse una distribución uniforme del esfuerzo normal, cuando la
resultante de las cargas aplicadas (P) pase por el CENTROIDE del área transversal (ESTADO DE CARGA AXIAL CENTRADA).
2) Si un elemento está sometido a carga axial, pero existen SECCIONES
TRANSVERSALES EXCÉNTRICAS, los esfuerzos normales en éstas, NO pueden suponerse uniformemente distribuidas.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
30
P
P
M = Pe
e
En esta sección transversal el esfuerzo normal NO puede suponerse UNIFORME. El momento de excentricidad M = Pe distorsiona la posible distribución uniforme del esfuerzo debido a la carga P.
excentri-cidad
P
Sección excéntrica respecto a la recta de acción de P.
P
EJEMPLOS 1) Calcular el esfuerzo normal promedio que se genera en los alambres del sistema
representado.
A
q
1 m
1 m
4 alambres simétricos, de diámetro 0.5 cm cada uno. q = 2 kg/cm
Fuerza total hacia abajo: Q = 2(50)(2) = 200 KG
Fuerza en cada alambre:
R=200 kg Equilibrio del nudo A
F
F F F
(Simetría)
Fvert = 0
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
31
alambre
F
vertical
200 = 4Fcos
22 50100
1004
200F
525F kg (TRACCIÓN)
Esfuerzo en cada alambre:
22 cm )5.0(
4
kg 525
A
F
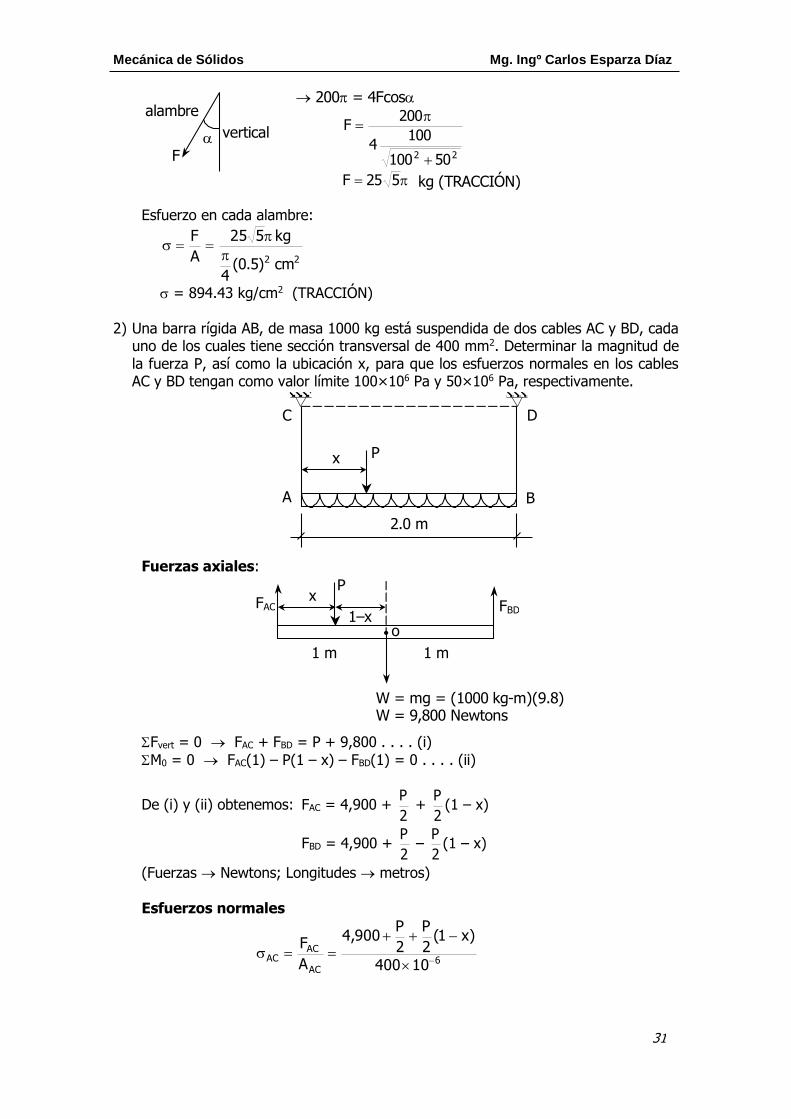
= 894.43 kg/cm2 (TRACCIÓN) 2) Una barra rígida AB, de masa 1000 kg está suspendida de dos cables AC y BD, cada
uno de los cuales tiene sección transversal de 400 mm2. Determinar la magnitud de la fuerza P, así como la ubicación x, para que los esfuerzos normales en los cables AC y BD tengan como valor límite 100×106 Pa y 50×106 Pa, respectivamente.
x P
A
C D
B
2.0 m
Fuerzas axiales:
x
P
1 m 1 m
o
FAC FBD 1–x
W = mg = (1000 kg-m)(9.8) W = 9,800 Newtons
Fvert = 0 FAC + FBD = P + 9,800 . . . . (i)
M0 = 0 FAC(1) – P(1 – x) – FBD(1) = 0 . . . . (ii)
De (i) y (ii) obtenemos: FAC = 4,900 + 2
P +
2
P(1 – x)
FBD = 4,900 + 2
P –
2
P(1 – x)
(Fuerzas Newtons; Longitudes metros) Esfuerzos normales
6
AC
ACAC
10400
)x1(2
P
2
P900,4
A
F

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
32
6BD
BDBD
10400
)x1(2
P
2
P900,4
A
F
Valores límite
AC 100×106 Pa
BD 50×106 Pa
Luego 6
610100
10400
)x1(2
P
2
P900,4
. . . . (*)
6
61050
10400
)x1(2
P
2
P900,4
. . . . (**)
De (*) y (**) obtenemos: P = 50,200 Newtons x = 0.602 metros
3) Determinar la forma del sólido, tal que el esfuerzo normal sea el mismo en todas las secciones transversales (sólidos de igual Resistencia).
P
Peso específico
A0
dx
x
P
dx
Área transversal A
A+dA
Aislamos la porción de sólido de altura dx:
Aproximación al peso del elemento diferencial:
dxdAAA
)2
(
Fvert = 0 (A + dA) – A – dx)2
dAA2(
= 0
Simplificando: dA – Adx – 2
dAdx = 0
Considerando diferenciales de 1er orden:
dA – Adx = 0
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
33
De donde dxA
dA
integrando
dx
A
dA
kxLnA
Para x = 0 es A = A0 (dato)
Ln A0 = k
Por tanto 0LnAxLnA
x
A
ALn
0
Pasando a la forma exponencial: x
0
eA
A
x
0eAA
Ley de variación de las secciones
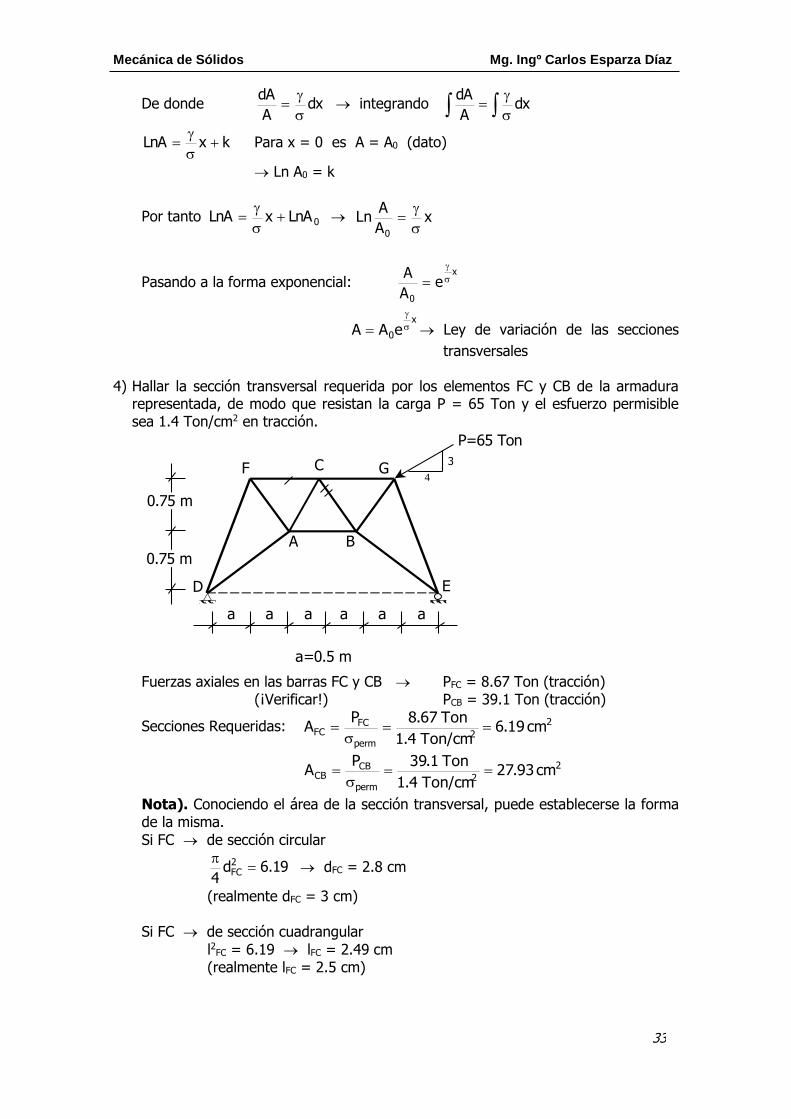
transversales 4) Hallar la sección transversal requerida por los elementos FC y CB de la armadura
representada, de modo que resistan la carga P = 65 Ton y el esfuerzo permisible sea 1.4 Ton/cm2 en tracción.
A
a=0.5 m
a a a a a a
0.75 m
0.75 m B
C
D E
F G
P=65 Ton
3
4
Fuerzas axiales en las barras FC y CB PFC = 8.67 Ton (tracción) (¡Verificar!) PCB = 39.1 Ton (tracción)
Secciones Requeridas: 2
2perm
FCFC cm 19.6
Ton/cm 4.1
Ton 67.8PA
2
2perm
CBCB cm 93.27
Ton/cm 4.1
Ton 1.39PA
Nota). Conociendo el área de la sección transversal, puede establecerse la forma de la misma.
Si FC de sección circular
19.6d4
2FC
dFC = 2.8 cm
(realmente dFC = 3 cm)
Si FC de sección cuadrangular
l2FC = 6.19 lFC = 2.49 cm (realmente lFC = 2.5 cm)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
34
Similar para la barra CB. 5) La estructura articulada que se representa, debe soportar la carga P. El esfuerzo
normal debe ser el mismo en los dos miembros. Si los miembros AB y BC son de
sección transversal constante, determinar el ángulo necesario para alcanzar el peso mínimo de la estructura.
A
C B
P
L
FCB
FAB
P
Fuerzas Normales en las barras:
FCB = P cotan
sen
PFAB
(FCB tracción
FAB compresión)
Barras homogéneas del mismo material
Esfuerzos Normales (valor absoluto):
barra CB CBA
cotan P
cotan PACB
barra AB ABA
sen/P
sen
PAAB
Peso de la estructura
(: peso específico) )cos
LALA(W ABCB
cossen
PLL cotan
PW
)cossen
1an(cotL
PW
Peso Mínimo 0d
dW
0
cos sen
cossencosec
22
222
Resolviendo la ecuación anterior (para 0 < < /2) se obtiene
tan = 2 55°
6) Calcular el máximo esfuerzo normal que se genera cuando el cono circular recto,
gira con velocidad angular constante alrededor de un eje perpendicular a su eje
longitudinal. Considerar el peso específico del material del cono.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
35
r
L Peso específico o
L
o
r
L – y y
t
o
r
L – y y
t z
L – u
u du
Fuerza Axial: Determinamos la fuerza axial generada por la rotación de una porción del cono. Definimos un disco diferencial a la distancia u del eje de giro.
y
t
L
r y
L
rt ;
uL
z
L
r
)uL(
L
rz
Cuando gira el disco diferencial se genera una fuerza diferencial

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
36
o z
dF
disco de masa dm
dF = (dm)a . . . . (i)
Pero dV
dm ; y a = 2u
dF = (dV)2u
dF = (z2du)2u
udu)uL(L
r
gdF 2
2
22
La fuerza generada por la rotación del cono de altura y, es:
L
yL
2
2
22
du u)uL(gL
rF
Desarrollando la integral y simplificando, obtenemos:
)y4
1y
3
L(
gL
rF 43
2
22
área transversal A
F t
y Esfuerzo Normal:
A
F
A = t2
2
2
2
43
2
22
yL
r
y4
1y
3
L
gL
r
Simplificando
2
2
y4
1y
3
L
g
Condición para Esfuerzo Normal Máximo:
0dy
d
0y
2
1
3
L L
3
2y
2
2
máx )L3
2(
4
1L
3
2
3
L
g
g9
L22
máx
(máx 0dy
d2
2
)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
37
1.3.3) Principio de Saint - Venant
P P
Concentraciones del Esf. Normal
(Distribución no uniforme)
Si se prescinde de un CORTO SEGMENTO INICIAL de la barra, los esfuerzos internos (y las deformaciones) NO CAMBIAN si se sustituye un sistema de fuerzas externas por otro que tenga los mismos parámetros.
P
P
P
Q1 Q2
Q1 Q2
P: resultante de Q1 y Q2
La misma distribución del Esfuerzo Normal
"Si se cambia la distribución de las fuerzas aplicadas en uno de los extremos, sin que cambien la resultante, los esfuerzos internos sólo cambian en segmentos iniciales de longitud aproximada a la mayor dimensión de la sección transversal".
P
P
1 2
P
1 2
El principio de Saint - Venant puede interpretarse de la manera siguiente:
" En elementos sometidos a Carga Axial, la diferencia entre el valor promedio del esfuerzo normal y el valor del esfuerzo normal en un punto, es despreciable en secciones transversales suficientemente alejadas de los puntos de aplicación de las cargas, pero es importante en la vecindad de tales punto".
1.4) Esfuerzo Normal de Aplastamiento (Esfuerzo de Apoyo)
En el análisis de sistemas estructurales, frecuentemente se presentan casos en los que un cuerpo es soportado o sostenido por otro. Por ejemplo, en el sistema poste-zapata-suelo, que se representa:

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
38
P O S T E
ZAPATA
SUELO
En esta superficie se desarrolla ap entre poste y zapata
En esta superficie se desarrolla ap entre zapata y suelo
Si la resultante de las cargas aplicadas pasa por el centroide del ÁREA DE CONTACTO entre los cuerpos, se genera un caso particular de esfuerzo normal, denominado ESFUERZO DE APLASTAMIENTO O ESFUERZO DE APOYO (ap).
apap
A
P
Siendo Aap el área de contacto entre los cuerpos.
P
Sección de área
A1
11ap
A
P
Sección de área A2
22ap
A
P
COMPRESIONES
P
Ejemplo) Un poste de madera de 15×15 cm2 de sección transversal transmite una carga de 5.o Ton, a una zapata de concreto, según se indica. i) Hallar el esfuerzo de apoyo entre madera y concreto. ii) Si la presión admisible en el terreno es 1 kg/cm2, determinar las dimensiones de la
planta de una zapata cuadrada. No incluir los pesos propios.
Nota: Se determinan los esfuerzos generados por la carga axial P. No se incluye el peso propio de los sólidos.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
39
15×15 cm2
5 Ton
x
x
i) 2ap
cm 1515
Ton 51
2apcm 1515
kg 50001 2
ap kg/cm 22.221
5 Ton ii)
permisible = 1 kg/cm2
1x
50002ap2
x = 70.71 cm
Nota). Esfuerzos de apoyo o de aplastamiento se presentan frecuentemente entre
elementos cuya superficie de contacto NO ESTÁ EN UN PLANO. Por ejemplo: Se presenta esfuerzo de aplastamiento entre el conector (pasador) y las placas que soporta en el sistema representado.
El pasador ejerce sobre la placa una fuerza igual y opuesta a la ejercida por la placa sobre el pasador.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
40
Nota). En todos los casos, el área nominal de aplastamiento (apoyo) es el área de la proyección de la superficie real de contacto entre los cuerpos, en un plano perpendicular a la dirección de la fuerza.
Ejemplos 1) La carga aplicada a una varilla de acero, se distribuye a una viga de madera
mediante una placa de apoyo cuyo diámetro interior es 1". Si el esfuerzo normal en el acero es 5 klb/pulg2 y el esfuerzo de apoyo entre la placa de acero y la madera no debe exceder de 750 lb/pulg2, hallar el diámetro exterior de la placa de apoyo.
A
1
2
3
4
P
b
d
P
P
La real distribución del esfuerzo en el área de contacto es muy complicada. Para fines prácticos se usará un VALOR PROMEDIO NOMINAL del esfuerzo de aplastamiento, obtenido dividiendo la carga P entre el ÁREA DE LA PROYECCIÓN DEL PASADOR EN LA SECCIÓN DE LA PLACA (rectángulo 1234).
bd
Pap
bd área nominal de aplastamiento
P
Plano a la
recta de acción de la fuerza P
ÁREA NOMINAL DE APLASTAMIENTO
SUPERFICIE REAL DE CONTACTO
Aap

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
41
i) Esfuerzo normal en la varilla de acero: ;
P = Aacero = P = 3,006.6 lb
ii) Esfuerzo de apoyo (contacto entre placa de acero y viga de madera)
Aap = 4 pulg2
Aap corona circular. Luego
d 2.47 pulg
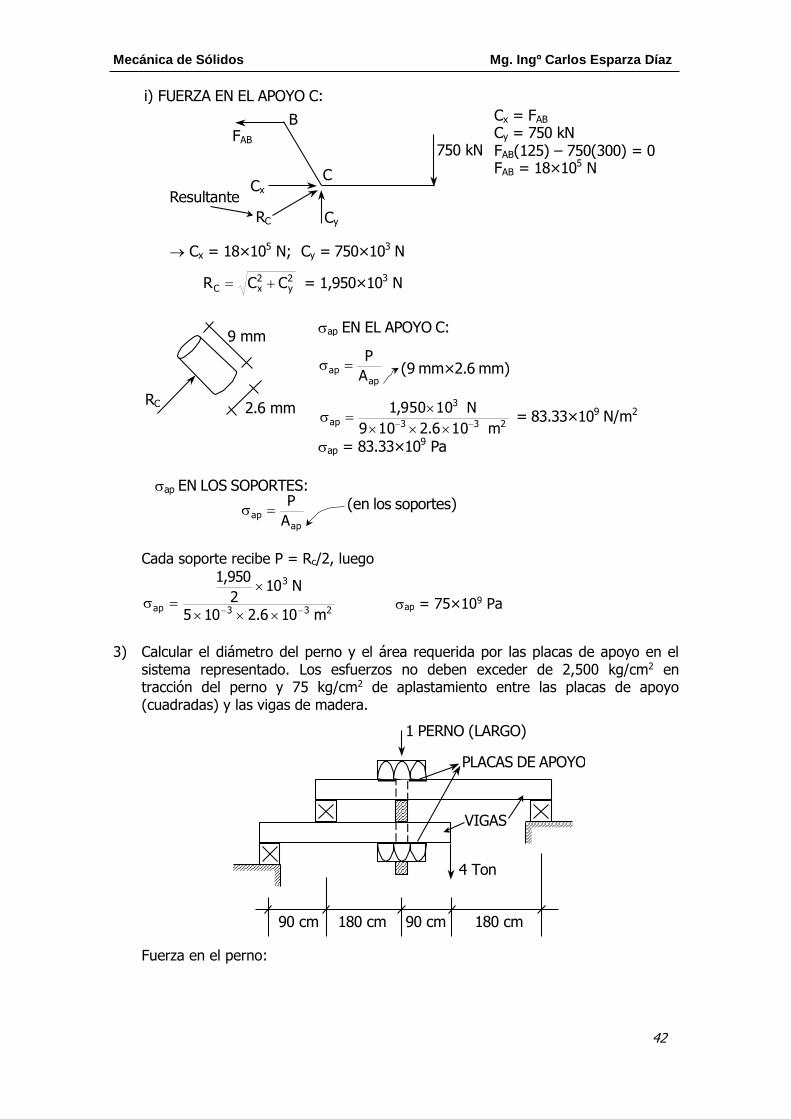
(En la prática d 2.5 pulg) 2) En el sistema representado, determinar
i) El esfuerzo de apoyo en C. ii) Los esfuerzos de apoyo en cada soporte (dos soportes simétricos).
aceroA
P (dato)
pulg
klb 52
22
2lgpu )
8
7(
4
pulg
lb 000,5
apap
A
P
2ap
aplb/pulg 750
lb 3,006.6PA
4)1d(4
22
750 kN Soportes
A
B
C
125 mm
Pasador de 2.6 mm de diámetro
75 mm 300 mm
9 mm
Soportes
5 mm
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
42
Cada soporte recibe P = Rc/2, luego
ap = 75×109 Pa
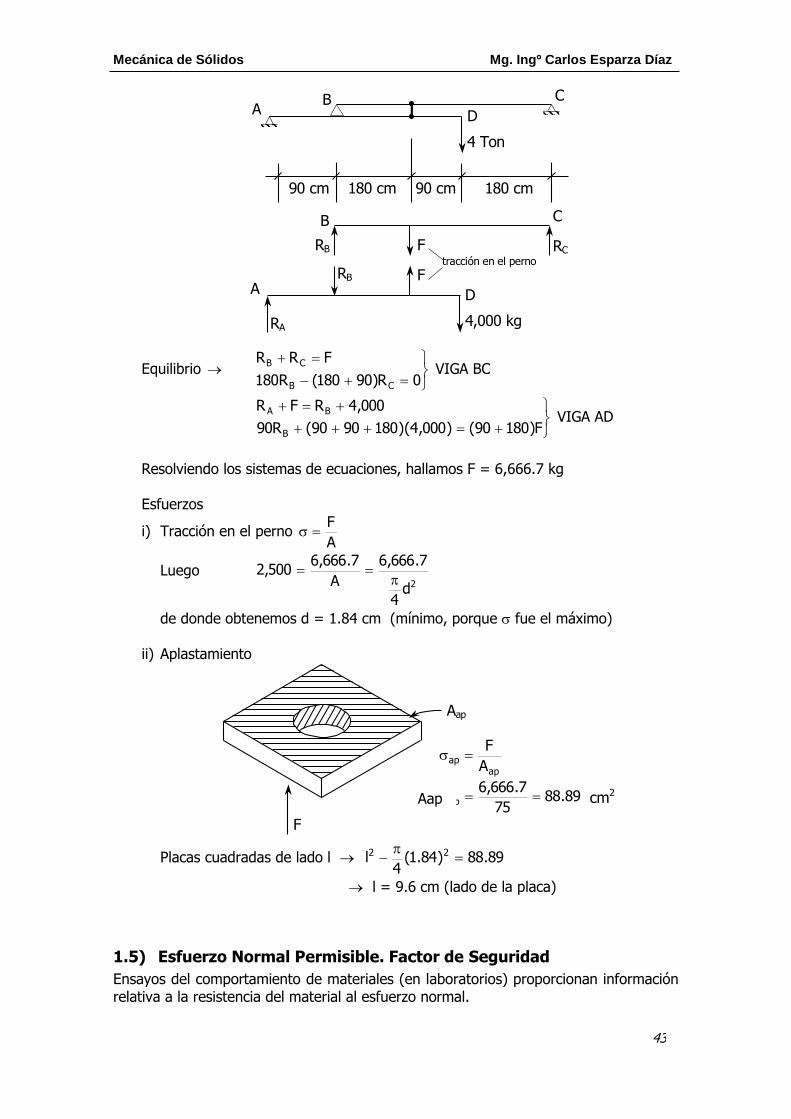
3) Calcular el diámetro del perno y el área requerida por las placas de apoyo en el
sistema representado. Los esfuerzos no deben exceder de 2,500 kg/cm2 en tracción del perno y 75 kg/cm2 de aplastamiento entre las placas de apoyo (cuadradas) y las vigas de madera.
Fuerza en el perno:
i) FUERZA EN EL APOYO C:
Cx C
Cy RC
Resultante
B FAB
750 kN
Cx = 18×105 N; Cy = 750×103 N
Cx = FAB Cy = 750 kN FAB(125) – 750(300) = 0 FAB = 18×105 N
2y
2xC CCR = 1,950×103 N
ap EN EL APOYO C: 9 mm
2.6 mm RC
apap
A
P (9 mm×2.6 mm)
233
3
apm 106.2109
N 10950,1
= 83.33×109 N/m2
ap = 83.33×109 Pa
ap EN LOS SOPORTES:
apap
A
P
(en los soportes)
233
3
apm 106.2105
N 102
950,1
1 PERNO (LARGO)
VIGAS
4 Ton
90 cm 90 cm 180 cm 180 cm
PLACAS DE APOYO
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
43
Equilibrio VIGA BC
VIGA AD
Resolviendo los sistemas de ecuaciones, hallamos F = 6,666.7 kg Esfuerzos
i) Tracción en el perno
Luego
de donde obtenemos d = 1.84 cm (mínimo, porque fue el máximo) ii) Aplastamiento
Placas cuadradas de lado l
l = 9.6 cm (lado de la placa)
1.5) Esfuerzo Normal Permisible. Factor de Seguridad
Ensayos del comportamiento de materiales (en laboratorios) proporcionan información relativa a la resistencia del material al esfuerzo normal.
A B
D
C
4 Ton
90 cm 90 cm 180 cm 180 cm
A
B
D
C
4,000 kg
RB
RB
F
F
RC tracción en el perno
RA
0R)90180(R180
FRR
CB
CB
F)18090()000,4)(1809090(R90
000,4RFR
B
BA
A
F
2d4
7.666,6
A
7.666,6500,2
Aap
F
apap
A
F
89.8875
7.666,6ap cm2
89.88)84.1(4
l 22
Aap
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
44
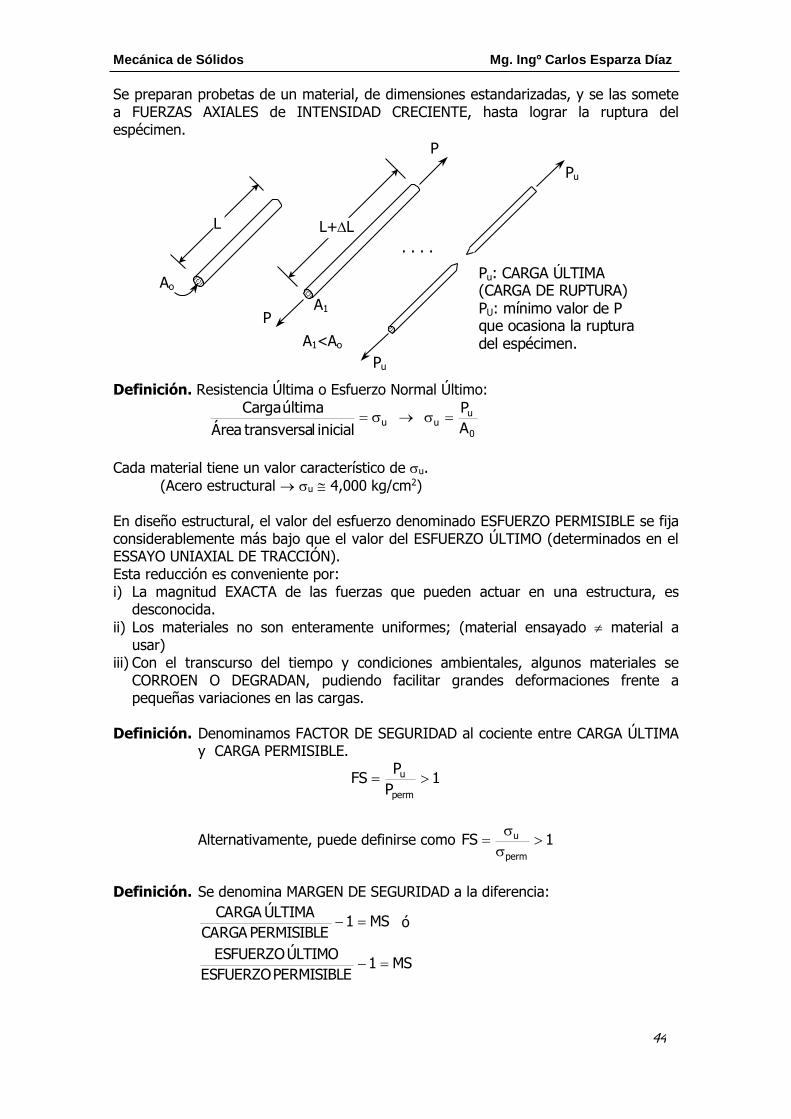
Se preparan probetas de un material, de dimensiones estandarizadas, y se las somete a FUERZAS AXIALES de INTENSIDAD CRECIENTE, hasta lograr la ruptura del espécimen.
Definición. Resistencia Última o Esfuerzo Normal Último:
Cada material tiene un valor característico de u.
(Acero estructural u 4,000 kg/cm2)
En diseño estructural, el valor del esfuerzo denominado ESFUERZO PERMISIBLE se fija considerablemente más bajo que el valor del ESFUERZO ÚLTIMO (determinados en el ESSAYO UNIAXIAL DE TRACCIÓN). Esta reducción es conveniente por: i) La magnitud EXACTA de las fuerzas que pueden actuar en una estructura, es
desconocida.
ii) Los materiales no son enteramente uniformes; (material ensayado material a usar)
iii) Con el transcurso del tiempo y condiciones ambientales, algunos materiales se CORROEN O DEGRADAN, pudiendo facilitar grandes deformaciones frente a pequeñas variaciones en las cargas.
Definición. Denominamos FACTOR DE SEGURIDAD al cociente entre CARGA ÚLTIMA
y CARGA PERMISIBLE.
Alternativamente, puede definirse como
Definición. Se denomina MARGEN DE SEGURIDAD a la diferencia:
ó
Ao
L
P
P
L+L
A1
A1<Ao
Pu
Pu
. . . .
Pu: CARGA ÚLTIMA (CARGA DE RUPTURA) PU: mínimo valor de P que ocasiona la ruptura del espécimen.
uinicial ltransversa Área
última Carga
0
uu
A
P
1P
PFS
perm
u
1FSperm
u
MS1PERMISIBLECARGA
ÚLTIMACARGA
MS1PERMISIBLE ESFUERZO
ÚLTIMO ESFUERZO
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
45
Las fracciones que definen MS (ó FS) NO SON GENERALMENTE iguales entre sí, puesto que los esfuerzos no varían necesariamente en forma lineal con las cargas. Nota). El diseño de elementos sencillos sometidos a carga axial de tracción, depende
de la fórmula .
En el caso de BARRAS CORTAS sometidas a compresión, puede usarse la ecuación anterior. Sin embargo, cuando se consideran ELEMENTOS LARGOS de sección transversal reducida sometidos a COMPRESIÓN, la fórmula
NO se aplica directamente.
(Pueden presentarse problemas de pérdida de estabilidad)
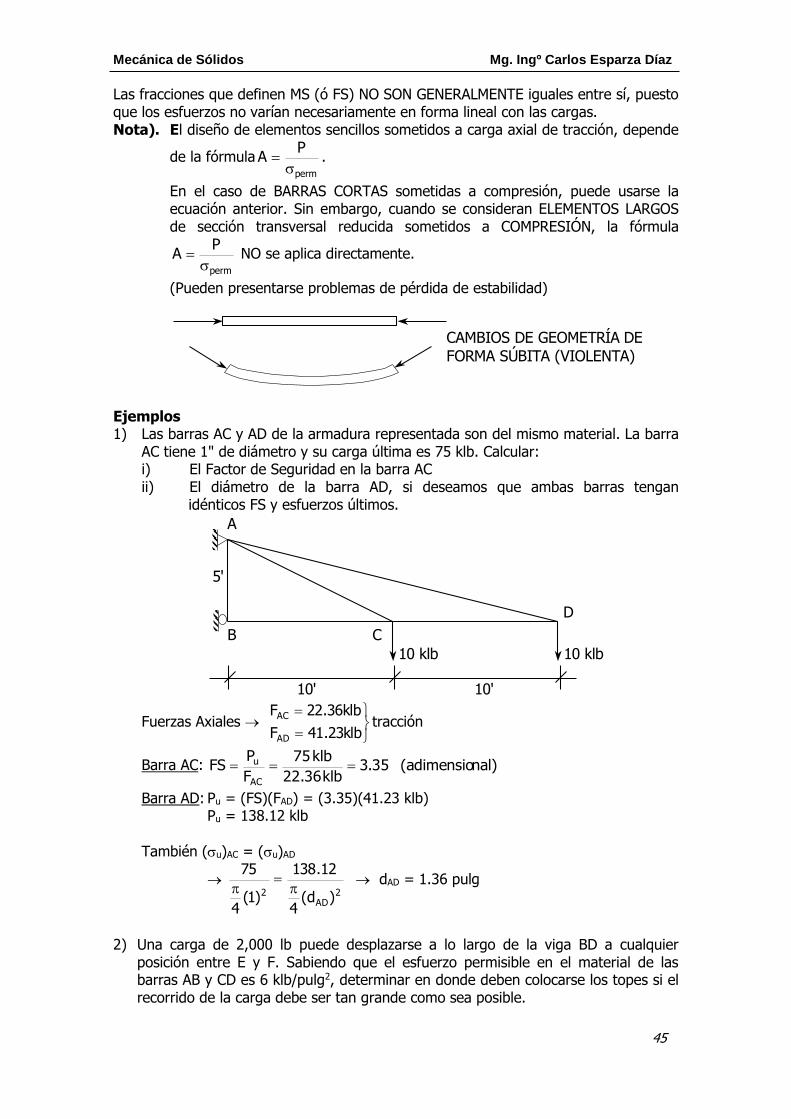
Ejemplos 1) Las barras AC y AD de la armadura representada son del mismo material. La barra
AC tiene 1" de diámetro y su carga última es 75 klb. Calcular: i) El Factor de Seguridad en la barra AC ii) El diámetro de la barra AD, si deseamos que ambas barras tengan
idénticos FS y esfuerzos últimos.
Fuerzas Axiales tracción
Barra AC:
Barra AD: Pu = (FS)(FAD) = (3.35)(41.23 klb) Pu = 138.12 klb
También (u)AC = (u)AD
dAD = 1.36 pulg
2) Una carga de 2,000 lb puede desplazarse a lo largo de la viga BD a cualquier
posición entre E y F. Sabiendo que el esfuerzo permisible en el material de las barras AB y CD es 6 klb/pulg2, determinar en donde deben colocarse los topes si el recorrido de la carga debe ser tan grande como sea posible.
perm
PA
perm
PA
CAMBIOS DE GEOMETRÍA DE
FORMA SÚBITA (VIOLENTA)
A
B C
D
10 klb
10' 10'
5'
10 klb
klb23.41F
klb36.22F
AD
AC
nal)(adimensio 35.3klb 22.36
klb 75
F
PFS
AC
u
2AD
2 )d(4
12.138
)1(4
75

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
46
Fvert = 0 FAB + FCD = 2,000
MB = 0 2,000X – 60FCD = 0 De donde obtenemos FCD = 33.33X y FAB = 2,000 – 33.33X
Varilla AB (FAB)máx = 6,000 = 1,178 lb
A partir de este valor, podemos encontrar XE.
FAB (FAB)máx 2,000 – 33.33X 1,178
X 24.7 pulg XE = 24.7 pulg
Varilla CD (FCD)máx = 6,000 = 1,841 lb
A partir de este valor, podemos encontrar XF.
FCD (FCD)máx 33.33X 1,841
X 55.2 pulg XF = 55.2 pulg
3) El cucharón para concreto representado en el esquema peso 25 kN. Si el esfuerzo permisible en el cable es de 35 MPa y el coeficiente de fricción entre el cucharón y la resbaladera es µ = 0.3, encontrar el diámetro mínimo del cable. Verificar los dos funcionamientos del cucharón, tanto cuando baja como cuando sube.
A
B
C
D E F
x 200 lb
xE
60 pulg
d=½" d=5/8"
x 200 lb
FAB FCD
Diagrama de cuerpo libre de la viga BD
xF
B D
AB
AB
A
F
2
2
1
4
CD
CD
A
F
2
8
5
4
W
=63.4°
FC
W
N: fuerza normal
: fuerza en el cable
fr: fuerza de fricción
i) Movimiento de subida del cucharón Diagrama de cuerpo libre
2000 lbs
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
47
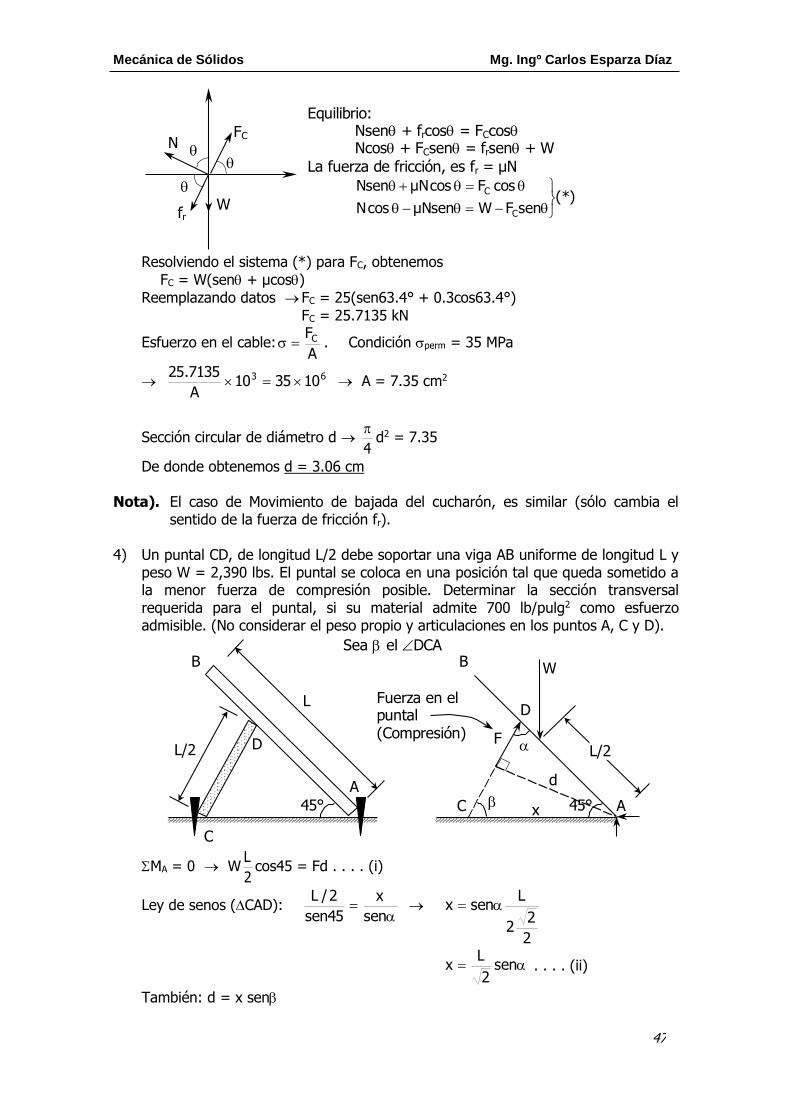
Resolviendo el sistema (*) para FC, obtenemos
FC = W(sen + µcos)
Reemplazando datos FC = 25(sen63.4° + 0.3cos63.4°)
FC = 25.7135 kN
Esfuerzo en el cable: . Condición perm = 35 MPa
A = 7.35 cm2
Sección circular de diámetro d d2 = 7.35
De donde obtenemos d = 3.06 cm
Nota). El caso de Movimiento de bajada del cucharón, es similar (sólo cambia el sentido de la fuerza de fricción fr).
4) Un puntal CD, de longitud L/2 debe soportar una viga AB uniforme de longitud L y
peso W = 2,390 lbs. El puntal se coloca en una posición tal que queda sometido a la menor fuerza de compresión posible. Determinar la sección transversal requerida para el puntal, si su material admite 700 lb/pulg2 como esfuerzo admisible. (No considerar el peso propio y articulaciones en los puntos A, C y D).
MA = 0 W cos45 = Fd . . . . (i)
Ley de senos (CAD):
. . . . (ii)
También: d = x sen
FC
W
N
fr
Equilibrio: Nsen + frcos = FCcos Ncos + FCsen = frsen + W
La fuerza de fricción, es fr = µN
(*)senFWµNsencosN
cosFcosµNNsen
C
C
A
FC
63 103510A
7135.25
4
L/2
L
C
D
45°
A
B
C
D
45° A
B
d
F
Fuerza en el puntal (Compresión)
W
L/2
Sea el DCA
x
2
L
sen
x
45sen
2/L
2
22
Lsenx
sen2
Lx

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
48
d = . . . . (iii)
Reemplazamos (iii) en (i) W cos45 = F
De donde obtenemos . . . . (iv)
Para que F sea mínimo, basta que y = sen(135 – ) sen sea máximo.
= sen(135 – ) cos – sen cos(135 – )
= sen(135 – 2) = 0 (condición)
De donde obtenemos = 67.5°
Reemplazando en la ecuación (iv):
Fmín = 1,399.95 lbs
Condición para 700 =
A = 2 pulg2
1.6) Esfuerzo Cortante. Esfuerzo Cortante Permisible
Las fuerzas internas cortantes, generan ESFUERZOS CORTANTES en la sección de interés.
.6.1) Esfuerzo Cortante Promedio ()
Existen estados particulares de carga, en los cuales la única acción interna es una fuerza cortante. Por ejemplo, en un sistema formado por dos placas delgadas conectadas por un pasador, según se indica.
sen sen2
L
2
L sen sen
2
L
sen)135(sen2
WF
d
dy
d
dy
67.5sen 2
lb 2,390F
2mín
A
95.399,1ad
A
95.399,1
x
z
y
Vxz
Vxy
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
49
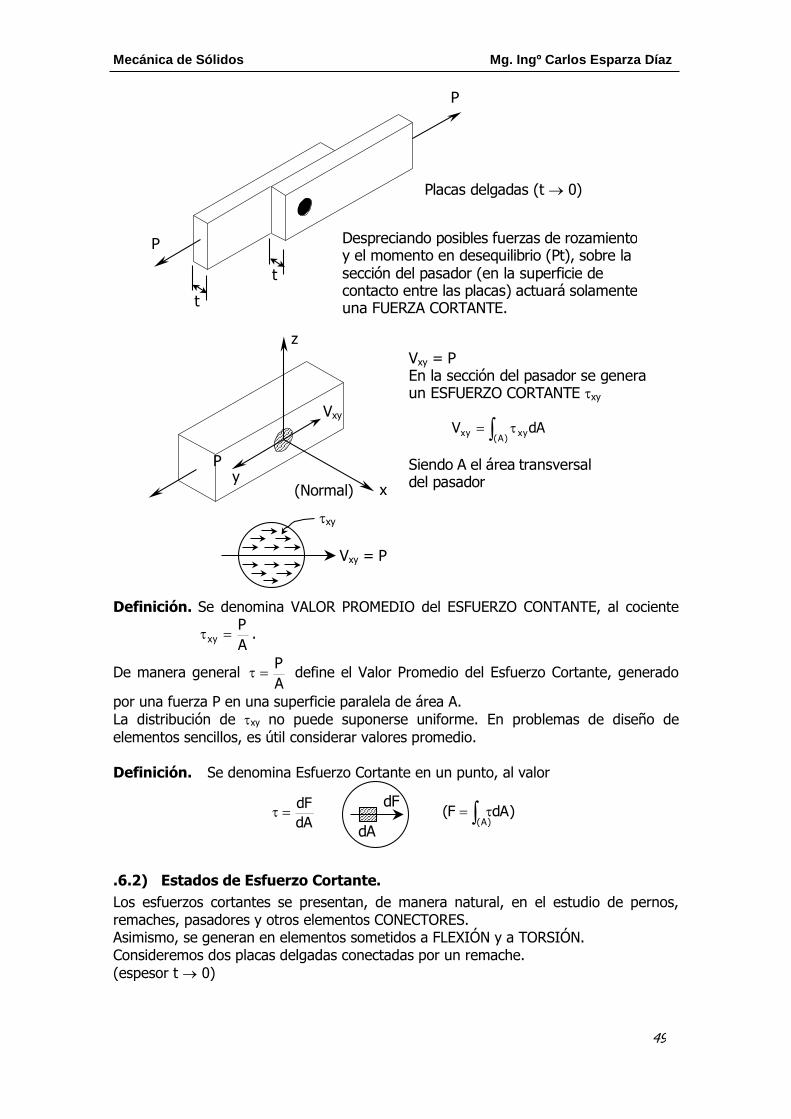
Definición. Se denomina VALOR PROMEDIO del ESFUERZO CONTANTE, al cociente
.
De manera general define el Valor Promedio del Esfuerzo Cortante, generado
por una fuerza P en una superficie paralela de área A. La distribución de xy no puede suponerse uniforme. En problemas de diseño de
elementos sencillos, es útil considerar valores promedio. Definición. Se denomina Esfuerzo Cortante en un punto, al valor
.6.2) Estados de Esfuerzo Cortante.
Los esfuerzos cortantes se presentan, de manera natural, en el estudio de pernos, remaches, pasadores y otros elementos CONECTORES. Asimismo, se generan en elementos sometidos a FLEXIÓN y a TORSIÓN. Consideremos dos placas delgadas conectadas por un remache.
(espesor t 0)
t
t
P
P
Placas delgadas (t 0)
Despreciando posibles fuerzas de rozamiento y el momento en desequilibrio (Pt), sobre la sección del pasador (en la superficie de contacto entre las placas) actuará solamente una FUERZA CORTANTE.
P
Vxy = P En la sección del pasador se genera un ESFUERZO CORTANTE xy
x (Normal) y
z
Vxy
xy
Vxy = P
)A(
xyxy dAV
Siendo A el área transversal del pasador
A
Pxy
A
P
)dAF()A(
dF
dA dA
dF
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
50
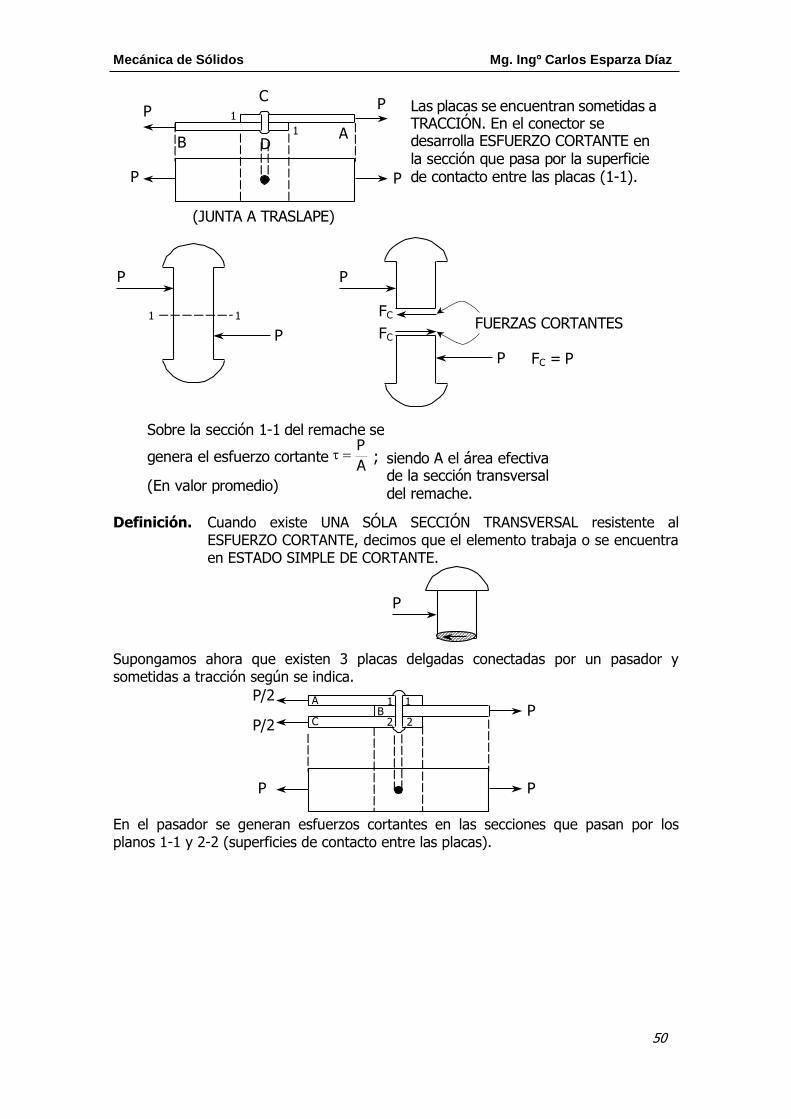
Definición. Cuando existe UNA SÓLA SECCIÓN TRANSVERSAL resistente al
ESFUERZO CORTANTE, decimos que el elemento trabaja o se encuentra en ESTADO SIMPLE DE CORTANTE.
Supongamos ahora que existen 3 placas delgadas conectadas por un pasador y sometidas a tracción según se indica.
En el pasador se generan esfuerzos cortantes en las secciones que pasan por los planos 1-1 y 2-2 (superficies de contacto entre las placas).
D 1
C
1
A B
P P
P P
(JUNTA A TRASLAPE)
Las placas se encuentran sometidas a TRACCIÓN. En el conector se desarrolla ESFUERZO CORTANTE en la sección que pasa por la superficie de contacto entre las placas (1-1).
1 1
P
P
P
P
FC
FC FUERZAS CORTANTES
FC = P
siendo A el área efectiva de la sección transversal del remache.
Sobre la sección 1-1 del remache se
genera el esfuerzo cortante A
P ;
(En valor promedio)
P
P
B
P/2
P/2
1 1
2 2
A
C P
P

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
51
En cada sección del conector, el promedio es .
Definición. Cuando existen DOS SECCIONES TRANSVERSALES resistentes al ESFUERZO CORTANTE, decimos que el elemento se encuentra o trabaja en ESTADO DOBLE DE CORTANTE.
Definición. El mínimo valor del Esfuerzo Cortante que genera una falla por
deslizamiento en el elemento, se denomina ESFUERZO CORTANTE
ÚLTIMO (u).
u es un valor característico para cada material. Su determinación es experimental.
Aluminio u = 1,750 kg/cm2
Acero u = 1,600 kg/cm2
Hierro u = 900 kg/cm2
Definición. Se denomina FACTOR DE SEGURIDAD al ESFUERZO CORTANTE, al
cociente
Ejemplos. 1) El conector representado será usado para soportar una carga de 1000 kg. Calcular
los esfuerzos que pueden ocasionar la falla del conector.
P 1 1
2 2
P/2
P/2
FC
FC
P FC
FC
P/2
P/2
A2
P
1FSperm
u

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
52
ii) APLASTAMIENTO
iii) CORTANTE (PUNZONAMIENTO)
2) Los elementos prismáticos A y B están unidos por dos láminas pegadas a ellos.
Hallar la longitud L para la cual el esfuerzo promedio en el pegamento es 800 kPa.
P
22 cm )1(4
kg 1000
A
P
1,273.24 kg/cm2
i)
2
22apap kg/cm 11.311
)1(4
2
kg 1000
A
P
ap = 311.11 kg/cm2
(La madera resistirá cuando menos 311.11 kg/cm2 de aplastamiento)
1 cm 2 cm
2 cm
Aap
d = 1 cm
CORTEA
F
)5.0)(5.0(2
kg 000,1
= 636.62 kg/cm2
P
0.5 cm
Área de corte (PUNZONAMIENTO)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
53
Dato = 800×103 Pa
Luego 800×103 =
De donde obtenemos L = 0.308 metros.
3) Dos placas de 100 mm de ancho y 10 mm de espesor están unidas por una junta traslapada, la cual contiene 3 remaches de 20 mm de diámetro cada uno. La fuerza que actúa en cada placa es de 40 kN. Hallar i) El esfuerzo cortante promedio en los remaches. ii) El máximo esfuerzo normal promedio en cada placa.
i) en los remaches
= = = 42.44×106 Pa
ii) en las placas = ; (máx Amín si P es constante)
La mínima sección transversal de las placas, es aquella que pasa por la fila de 2 remaches.
8 mm
A
B
L
24 kN
24 kN
(b = 100 mm
al papel)
(Fuerzas N; longitudes m
B
24 kN
FC FC
½(L – 8×10-3) = L/2 – 4×10-3
2FC = 24,000 N FC = 12,000 N
)1042
L(10100
000,12
A
F
33corte
C
)1042
L(10100
000,12
33
t=10 mm t
40 kN 40 kN
100 mm 40 kN
FC
FC
FC
Diagrama de cuerpo libre de una placa
3FC = 40 FC = 40/3 kN
(Estado simple de cortante)
corteA
FC
223
3
m )1020(4
N 103
40
A
P

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
54
4) El miembro AC de la estructura representada es una barra de ojo, cuyo cuerpo
tiene por dimensiones 2 × pulg. La barra está unida en A y en C por medio de
pasadores de de diámetro. Determinar la carga admisible P, limitada por barra
de ojo y sus conexiones. Los esfuerzos admisibles son
= 22,000 lb/pulg2
ap = 32,500 lb/pulg2
= 10,000 lb/pulg2
ESFUERZO NORMAL (EN EL CUERPO DE LA BARRA)
= 22,000 = P = 6,522.2 lbs
2m ]3102031010[231010031010
N 31040máx
d=20 mm 40 kN
10 mm
máx
máx = 66.67×106 Pa
2
1
2
1
8
"7
C
A
B
P 2'
6'' 2''
FUERZA EN LA BARRA AC
2' 6'
B P
FAC Mo = 0 P(8) – FAC6sen = 0
103
4FAC P
AC
AC
A
F
5.05.2
P 103
4

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
55
ESFUERZO DE APLASTAMIENTO (BARRA - CONECTOR)
ap = 32,500 = P = 16,861.4 lbs
ESFUERZO CORTANTE (PASADOR)
= = (ESTADO DOBLE DE CORTANTE)
10,000 = P = 2,852.6 lbs
La máxima carga admisible será la MENOR de las 3 calculadas. Pmáx = 2,852.6 lbs
5) La figura representa una viga compuesta por dos canales, soportada en el extremo
izquierdo por una barra de ojo de de diámetro, que usa un pasador de en
cada extremo. La viga está soportada en C por medio de una placa de apoyo de acero que mide 4"×6" y que se apoya a su vez sobre un muro de concreto. Determinar la carga máxima W que puede aplicarse. Los esfuerzos admisibles son:
en el pasador 10,000 lb/pulg2
ap en el concreto 500 lb/pulg2
en la barra 18,000 lb/pulg2
ap en el acero 45,000 lb/pulg2
FUERZA EN LA BARRA AB.
ap
AC
A
F
)8/7(5.2
P 103
4
corte
C
A
F
corte
AC
A
2/F
2
8
7
42
P 103
4
4
"3
4
"3
0.22"
canales
W
VIGA
PLACA
A
C
B MURO DE CONCRETO
PASADOR
2' 8'
W
2' 8'
A C
RA RC
MA = 0 10W – 2RC = 0
RC = 5W MC = 0 2RA – 8W = 0
RA = 4W (*)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
56
ESFUERZOS i) TRACCIÓN EN LA BARRA AB:
= P = A
P = (18,000)
P = 7,952.16 lbs (Fuerza máxima en la barra de ojo) ii) CORTANTE EN EL PASADOR A (ESTADO DOBLE)
= P = Acorte
P = (10,000)2
P = 8,835.73 lbs (Fuerza cortante máxima en el pasador)
iii) APOYO ENTRE PASADOR Y CANALES
ap = P = apAap
P = (45,000)(0.22)( )(2)
P = 14,850 lbs (Fuerza máxima de aplastamiento en los canales)
iv) APOYO PLACA – MURO DE CONCRETO.
ap = P = apAap
P = (500)(4×6) P = 12,000 lbs (Fuerza máxima de aplastamiento
sobre el muro de concreto) Las condiciones (i), (ii) y (iii) se aplican a la reacción en A:
= 7,952.16 lb (Limitada por el esfuerzo de tracción en la barra de ojo)
La condición (iv) se aplica en C:
= 12,000 lb (Fuerza de aplastamiento sobre el muro de concreto)
Teniendo presente las condiciones de equilibrio (*):
= 4Wmáx Wmáx = lbs
Wmáx = 1,988.04 lbs
= 5Wmáx Wmáx = lbs
Wmáx = 2,400 lbs
En definitiva Wmáx = 1,988.04 lbs (Cualquier carga menor incrementa el esfuerzo permisible en la barra de ojo)
corteA
P
4
2
4
3
corteA
P
4
2
4
3
apA
P
4
3
apA
P
máxAR
máxCR
máxAR4
16.952,7
máxCR5
000,12

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
57
6) El bloque (1) representado es de un material cuyo peso específico es 1 = 2 kg/dm3
y descansa sobre otro bloque (2) de otro material cuyo peso específico es 2 = 4 kg/dm3. Si la presión admisible en el terreno es p = 1.5 kg/cm2, determinar: i) La máxima altura h1, admisible. ii) El esfuerzo cortante en el bloque (2).
ii) Esfuerzo cortante en el bloque (2).
h1
h2=25 cm
A1
1 m
1 m
(1)
(2)
1
2
Área 2 m2 (A2)
h1máx
25 cm
1)
2)
p = 1.5 kg/cm2
W1
W2
i) h1 máxima Equilibrio: W1 + W2 = pA2 A1h11 + A2h22 = pA2
11
22221
A
hApAh
(Fuerzas kg; Long cm)
Reemplazando valores numéricos, se tiene: h1 = 1,400 cm h1máx = 14 m

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
58
W1 + W = pA1 + 4lh2
1h1A1 + 2h2A1 = pA1 + 4lh2
Reemplazando valores, obtenemos = 1.4 kg/cm2 (esfuerzo cortante de
punzonamiento). 7) Determinar la máxima carga P que puede aplicarse en la junta estructural
representada. Los remaches son de de diámetro cada uno. Considerar como
esfuerzos admisibles = 22 klb/pulg2; ap = 87 klb/pulg2; = 15 klb/pulg2.
(Datos: a = 1.5"; b = 2.5"; e = ).
= P = At P = (2a + 4b – 5d)e
Reemplazando datos: P = 22(2(1.5) + 4(2.5) – 5( ))
P = 76.3125 klb ii) APOYO
1)
2)
W1
W2
1
2
1)
2)
h1
h2
p
peso W (2)
peso W1 (1)
A1 l
l
2122111
lh4
pA)hh(A
4
"3
8
"3
A
a
P P
e
B B
A
Remaches de diámetro d
i) TRACCIÓN (Placa A) La sección transversal de área mínima es la que pasa por los centros de los remaches
e
P
a b b b b
tA
P
4
3
8
3
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
59
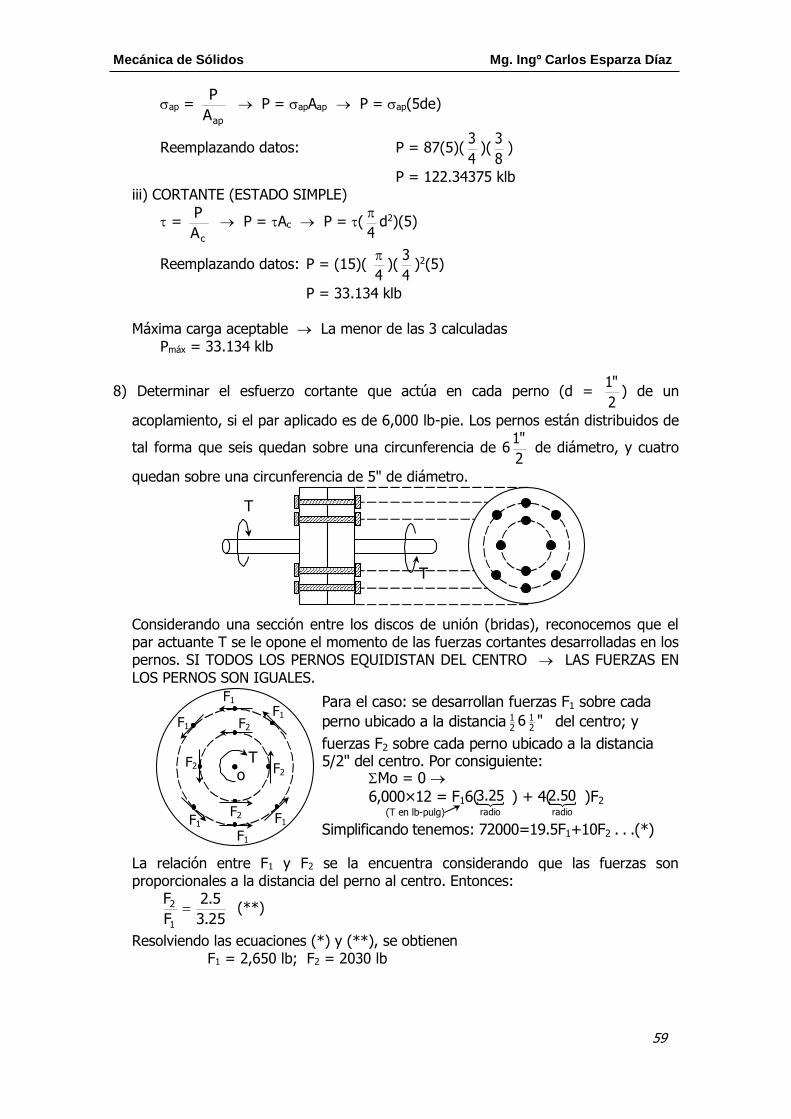
ap = P = apAap P = ap(5de)
Reemplazando datos: P = 87(5)( )( )
P = 122.34375 klb iii) CORTANTE (ESTADO SIMPLE)
= P = Ac P = ( d2)(5)
Reemplazando datos: P = (15)( )( )2(5)
P = 33.134 klb
Máxima carga aceptable La menor de las 3 calculadas Pmáx = 33.134 klb
8) Determinar el esfuerzo cortante que actúa en cada perno (d = ) de un
acoplamiento, si el par aplicado es de 6,000 lb-pie. Los pernos están distribuidos de
tal forma que seis quedan sobre una circunferencia de 6 de diámetro, y cuatro
quedan sobre una circunferencia de 5" de diámetro.
Considerando una sección entre los discos de unión (bridas), reconocemos que el par actuante T se le opone el momento de las fuerzas cortantes desarrolladas en los pernos. SI TODOS LOS PERNOS EQUIDISTAN DEL CENTRO LAS FUERZAS EN
LOS PERNOS SON IGUALES.
La relación entre F1 y F2 se la encuentra considerando que las fuerzas son proporcionales a la distancia del perno al centro. Entonces:
(**)
Resolviendo las ecuaciones (*) y (**), se obtienen F1 = 2,650 lb; F2 = 2030 lb
apA
P
4
3
8
3
cA
P
4
4
4
3
2
"1
2
"1
T
T
T o
F1
F1 F1
F1 F1
F1
F2
F2
F2 F2
Para el caso: se desarrollan fuerzas F1 sobre cada
perno ubicado a la distancia "621
21 del centro; y
fuerzas F2 sobre cada perno ubicado a la distancia 5/2" del centro. Por consiguiente:
Mo = 0
6,000×12 = F16(radio
25.3 ) + 4(radio
50.2 )F2
Simplificando tenemos: 72000=19.5F1+10F2 . . .(*)
(T en lb-pulg)
25.3
5.2
F
F
1
2
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
60
En cada perno del anillo exterior = = 13,520.4 lb/pulg2
En cada perno del anillo interior = = 10,357.1 lb/pulg2
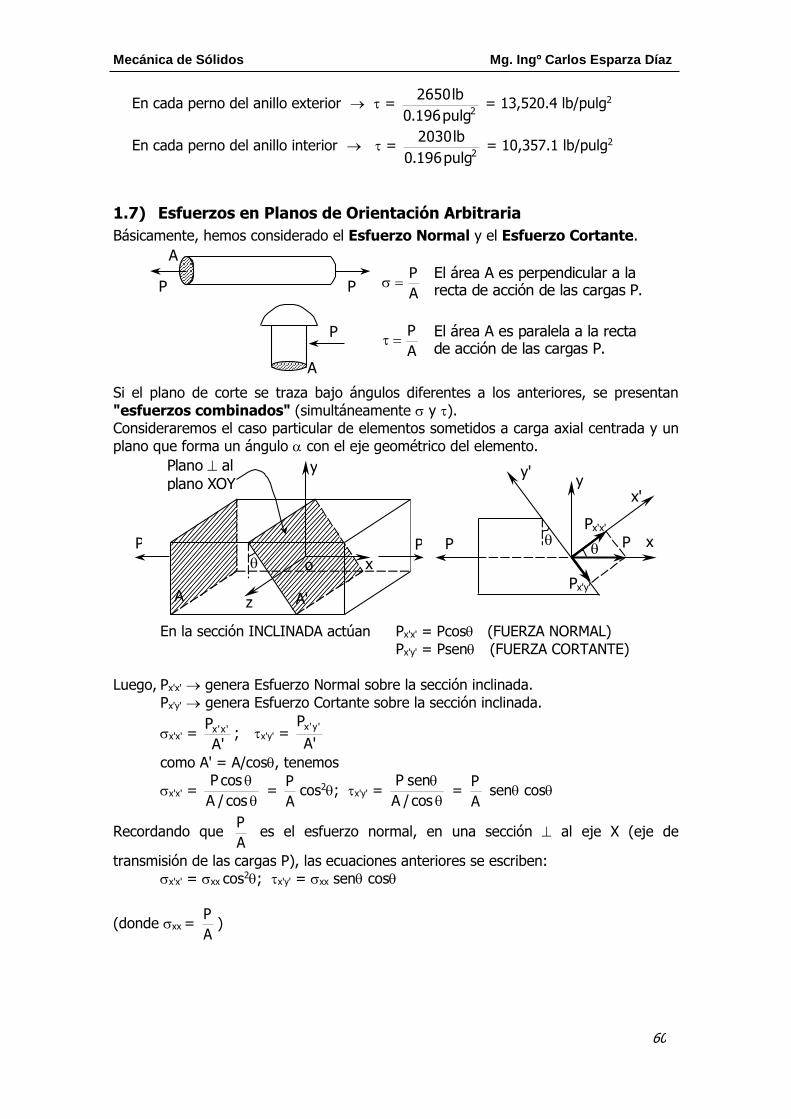
1.7) Esfuerzos en Planos de Orientación Arbitraria
Básicamente, hemos considerado el Esfuerzo Normal y el Esfuerzo Cortante.
Si el plano de corte se traza bajo ángulos diferentes a los anteriores, se presentan
"esfuerzos combinados" (simultáneamente y ). Consideraremos el caso particular de elementos sometidos a carga axial centrada y un
plano que forma un ángulo con el eje geométrico del elemento.
En la sección INCLINADA actúan Px'x' = Pcos (FUERZA NORMAL)
Px'y' = Psen (FUERZA CORTANTE)
Luego, Px'x' genera Esfuerzo Normal sobre la sección inclinada.
Px'y' genera Esfuerzo Cortante sobre la sección inclinada.
x'x' = ; x'y' =
como A' = A/cos, tenemos
x'x' = = cos2; x'y' = = sen cos
Recordando que es el esfuerzo normal, en una sección al eje X (eje de
transmisión de las cargas P), las ecuaciones anteriores se escriben: x'x' = xx cos2; x'y' = xx sen cos
(donde xx = )
2pulg 196.0
lb 2650
2pulg 196.0
lb 2030
P
A
P P
A
A
P
A
P
El área A es perpendicular a la recta de acción de las cargas P.
El área A es paralela a la recta de acción de las cargas P.
y
x
z
o
P P
A A'
Plano al
plano XOY
P
Px'x'
Px'y'
x P
x' y
y'
'A
P 'x'x
'A
P 'y'x
cos/A
cosP
A
P
cos/A
sen P
A
P
A
P
A
P

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
61
Las ecuaciones anteriores, pueden re-escribirse:
x'x' = . . . . (i)
x'y' = . . . . (ii)
Definición). Las ecuaciones (i) y (ii) son las ECUACIONES PARAMÉTRICAS de un LUGAR GEOMÉTRICO en el PLANO DE ESFUERZOS
Eliminando ente (i) y (ii), obtenemos:
. . . . (iii)
La ecuación (iii) representa una CIRCUNFERENCIA, denominada CIRCUNFERENCIA DE MOHR ó CIRCUNFERENCIA DE ESFUERZOS.
Todo punto de la circunferencia de esfuerzos representa el ESTADO DE ESFUERZOS en una SECCIÓN INCLINADA, y recíprocamente.
Las coordenadas del punto Q representan el Estado de Esfuerzos en una sección inclinada:
xx
x'y'
x'x'
)2cos1(2xx
2sen2xx
ESF. NORMALES
ESF. CORTANTES
2
xx2'y'x
2
xx'x'x
2)(
2
x'x'
x'y'
C
r c (2xx
, 0)
r = 2xx
x'x'
x'y'
C
r
u representa un esfuerzo normal
u = 2xx
+2xx
cos2
u = 2xx
(1 + 2cos) . . . . (i)
v representa un esfuerzo cortante
v = 2xx
sen2 . . . . (ii)
2
Q(u, v)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
62
PROBLEMAS
1) Las porciones M y N están pegadas a lo largo de un plano inclinado que forma °
con la horizontal. Sabiendo que los esfuerzos finales en la junta, son u = 17 MPa
y u = 9 MPa, hallar el intervalo de valores del ángulo entre los cuales el factor
de seguridad es por lo menos igual a 3.
ESFUERZOS EN LA SECCIÓN INCLINADA:
= = Pa = Pa
= = Pa = Pa
ESFUERZOS ÚLTIMOS u = 17×106 Pa y u = 9×106 Pa
FACTORES DE SEGURIDAD FS = . . . . (*) y FS = . . . . (**)
CONDICIÓN FS 3. Luego
. . . . (a) y . . . . (b)
Resolviendo simultáneamente las desigualdades (a) y (b), obtenemos: 22°47' 32°4'
xx
x'y'
x'x'
M
50 mm
N 30 mm
10 kN
V
10 kN
N
10×103 N
M
Área Normal Ao = 50×30 mm2 Área de la Sección Inclinada A'
A' = cos
Ao
A' =
cos
10301050 33
m2
FUERZAS SOBRE LA SUPERFICIE INCLINADA
N = 104 cos (N)
V = 104 sen (N)
'A
N
cos
103050
cos106
4
28
cos15
10
'A
V
cos
103050
sen106
4
cossen15
108
u
u
3
cos15
10
1017
28
6
3
cossen15
10
1098
6

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
63
2) Un marco de dos barras está sujeto a la carga indicada. Determinar el esfuerzo normal y el esfuerzo cortante promedios que actúan en las secciones a-a y b-b. La barra CB tiene una sección transversal cuadrada de 2 pulg. por lado.
Resolviendo el sistema de ecuaciones, obtenemos Ax= – 67.84 lb; Ay = – 37.50 lb; Rc = 135.68 lb Esfuerzos en la sección a-a.
Esfuerzos en la sección b-b.
Determinamos las fuerzas internas en la barra BC. Equilibrio
60°
Ax
Ay
A
d
300 lb-pie B
80 lb
60°
Rc
C 60°
d = 8sen60 pies
A 300 lb-pie
80 lb
a
a
b
B
30°
C
4 pies 4 pies
b
60°
Fh = 0 Ax + RCcos60 = 0 Fv = 0 Ay + RCsen60 – 80 = 0
MA = 0 300 + 80(4) – RC(8sen60) = 0
2
2aa lb/pulg 92.33pulg 22
lb 68.135
a-a = 0
a
a
135.68 lb
135.68 lb
b
135.68 lb
V 135.68
b
N
2''
Área de la sección inclinada A' = (4)(2)
A' = 8 pulg2
2bbpulg 8
lb 84.67
b-b = 8.48 lb/pulg2
2bbpulg 8
lb 50.117
b-b = 14.69 lb/pulg2
N = 135.68sen30 = 67.84 lb V = 135.68cos30 = 117.50 lb
30°
2''
x
x = 30sen
2
x = 4 pulg
60° 30°

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
64
3) Un tubo de acero de 300 mm de diámetro exterior está construido con una placa de 8 mm de espesor de pared, soldada en espiral que forma 20° con un plano perpendicular al eje del tubo. Se aplica una fuerza axial P = 250 kN. Determinar el esfuerzo normal y el esfuerzo cortante en direcciones respectivamente normal y tangente a la línea de soldadura.
Equilibrio:
Fvert = 0
(*) . . . . o(Ao) – (A)cos20 – (A)sen20 = 0
Fhoriz = 0
(**) . . . . (A)sen20 – (A)cos20 = 0
Reemplazando Ao en (*) y (**):
oAcos20 – Acos20 – Asen20 = 0
ocos20 – cos20 – sen20 = 0 . . . . (1)
sen20 – cos20 = 0 . . . . (2) Reemplazando o por su valor o = 34.07×106 Pa y resolviendo el sistema de
ecuaciones (1) y (2), obtenemos: = 30.085×106 Pa (Compresión)
= 10.95×106 Pa 4) Una barra de 1"de diámetro se comprime por aplicación de la fuerza P = 25 lb,
según se indica en el esquema. Determinar los esfuerzos normal y cortante sobra
la sección que forma = 45° con el eje de la barra.
20°
P = 250 kN En una sección al eje del tubo: Ao = (150×10-3)2 – (142×10-3)2
Ao = 7.339×10-3 m2 (SECCIÓN DEL TUBO) Esfuerzo Normal (paralelo al eje del tubo)
0 = 0A
P 0 =
3
3
10339.7
10250
0 = 34.07×106 Pa (COMPRESIÓN)
20°
0(A0)
(A)
(A)
LÍNEA DE SOLDADURA

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
65
Barra a ensayar:
Esfuerzos sobre la sección inclinada:
5) El esfuerzo normal sobre el plano pq de una barra prismática en tracción es de
8,220 lb/pulg2. Sobre el plano rs, el esfuerzo normal es de 3,290 lb/pulg2. Determinar el esfuerzo normal máximo y el esfuerzo cortante máximo en la barra.
Rígidos Barra a ensayar
P = 25 lb Determinamos la fuerza F sobre la barra a ensayar. 5" 15"
O
O
R F
P=25 lb
M0 = 0 5F – 20P = 0 F = 4P
F = 100 lb (COMPRESIÓN)
F = 100 lb
F = 100 lb
100
V
N
V N 100
45° 45°
Vcos45 – Ncos45 = 0 Vsen45 + Nsen45 – 100 = 0
De donde obtenemos:
N = 250 lb (compresión)
V = 250 lb
A
A0
A0 = 4 (1)2
45cosA
A0
45cos
AA 0
24
A
A
V ;
A
N
(siendo A el área de la sección inclinada) Luego:
24
250
= 63.66 lb/pulg2 (compresión)
24
250
= 63.66 lb/pulg2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
66
Resolviendo simultáneamente el sistema (iii) y (iv), obtenemos:
= 24.994°; o = 10,000 lb/pulg2. Usamos las ecuaciones (i) y (ii)
= 10,000 cos2 máx = 10,000 lb/pulg2 ( = 0°)
= 5,000 sen2 máx = 5,000 lb/pulg2 ( = 45°)
1.8) Deformaciones. Campo de Desplazamientos.
1.8.1) Introducción.
Las acciones aplicadas causan DEFORMACIÓN DEL SÓLIDO sobre el cual actúan, dependiendo, entre otros factores, de sus intensidades, forma de aplicación y de las características mecánicas del material que las soporta. En esta sección estableceremos descripciones cualitativas y cuantitativas de la DEFORMACIÓN.
r Los esfuerzos sobre una sección que forma °
con la vertical, son: = 0cos2 . . . . (i)
= 02
2sen . . . . (ii)
p
q
s 30°
P P
P N
V
donde 0 = 0A
P , siendo A0 el área
de la sección transversal
0
Sección de área A0
Sección de área A = cos
A0
0 =8,220
p
q
+30
0 =3,290
Datos: 8,220 = 0cos2 . . . . (iii)
3,290 = 0cos2( + 30) . . . . (iv)
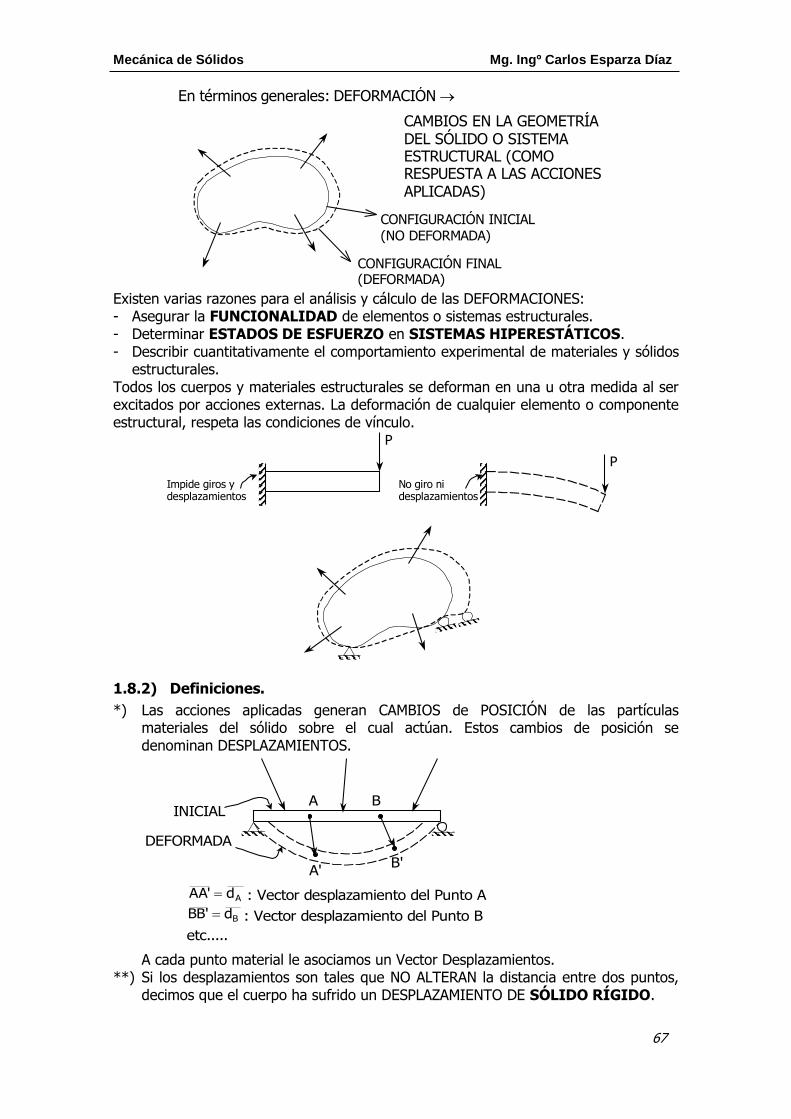
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
67
Existen varias razones para el análisis y cálculo de las DEFORMACIONES: - Asegurar la FUNCIONALIDAD de elementos o sistemas estructurales. - Determinar ESTADOS DE ESFUERZO en SISTEMAS HIPERESTÁTICOS. - Describir cuantitativamente el comportamiento experimental de materiales y sólidos
estructurales. Todos los cuerpos y materiales estructurales se deforman en una u otra medida al ser excitados por acciones externas. La deformación de cualquier elemento o componente estructural, respeta las condiciones de vínculo.
1.8.2) Definiciones.
*) Las acciones aplicadas generan CAMBIOS de POSICIÓN de las partículas materiales del sólido sobre el cual actúan. Estos cambios de posición se denominan DESPLAZAMIENTOS.
A cada punto material le asociamos un Vector Desplazamientos.
**) Si los desplazamientos son tales que NO ALTERAN la distancia entre dos puntos, decimos que el cuerpo ha sufrido un DESPLAZAMIENTO DE SÓLIDO RÍGIDO.
En términos generales: DEFORMACIÓN
CONFIGURACIÓN INICIAL (NO DEFORMADA)
CONFIGURACIÓN FINAL (DEFORMADA)
CAMBIOS EN LA GEOMETRÍA DEL SÓLIDO O SISTEMA ESTRUCTURAL (COMO RESPUESTA A LAS ACCIONES APLICADAS)
P
P
Impide giros y desplazamientos
No giro ni desplazamientos
A B
A' B'
INICIAL
DEFORMADA
Ad'AA : Vector desplazamiento del Punto A
Bd'BB : Vector desplazamiento del Punto B
etc.....

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
68
Desplazamientos de SÓLIDO RÍGIDO: TRASLACIONES Y ROTACIONES. ***) Si los desplazamientos son tales que alteran la distancia entre dos puntos
materiales del sólido, el sólido es un SÓLIDO DEFORMABLE.
1.8.3) Campo de Desplazamientos.
Una idea CUALITATIVA de la Deformación de un elemento por acción de una carga externa, se obtiene observando el PROCESO DE DEFORMACIÓN de una placa delgada, empotrada por uno de sus extremos, y sometida a una carga axial centrada de tracción actuando en su extremo libre.
Por acción de la fuerza axial P, la placa sufre una deformación. (Se observa una distorsión de la cuadrícula de referencia). En términos muy generales, la deformación sigue el esquema siguiente:
Ad
A
B d
d
Posición inicial
B'
Bd
Posición final
d'B'A
Ad
d
A
B B'
A'
d'
Bd
d d'
Inicial Final
L
y
A(xA, yA)
x
B(xB, yB)
Configuración inicial
Cuadrícula de referencia
Impide desplazamientos de sólido rígido
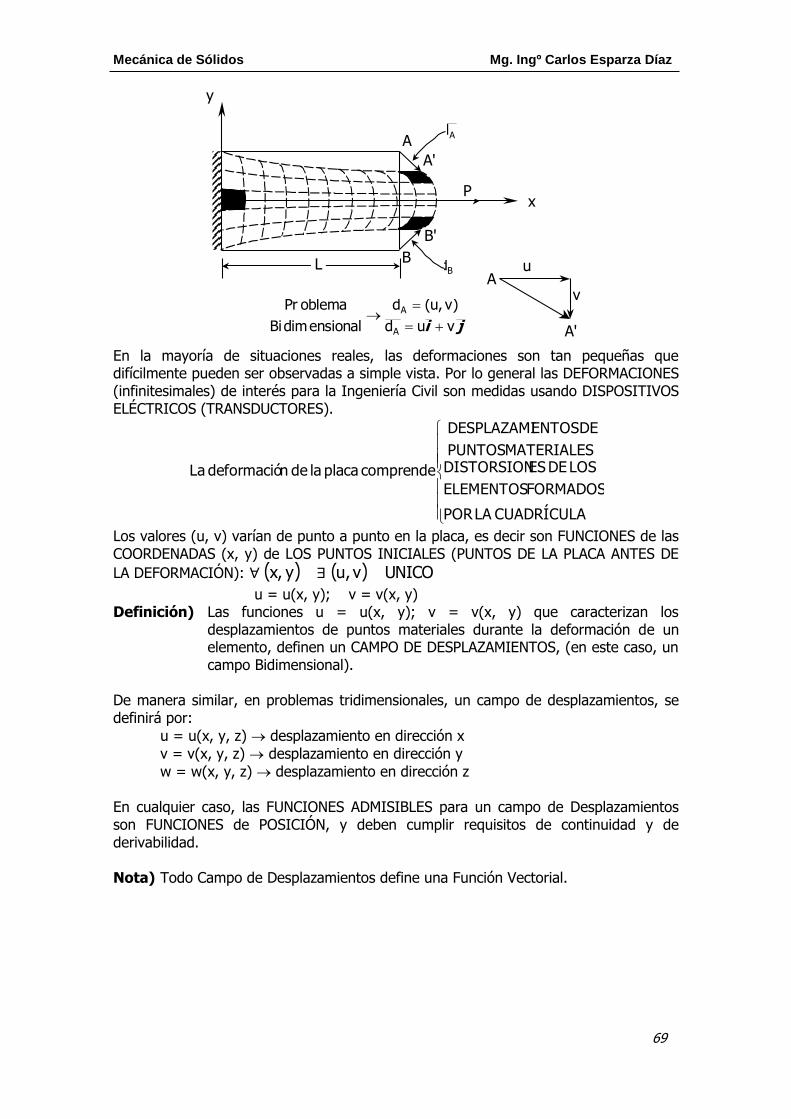
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
69
En la mayoría de situaciones reales, las deformaciones son tan pequeñas que difícilmente pueden ser observadas a simple vista. Por lo general las DEFORMACIONES (infinitesimales) de interés para la Ingeniería Civil son medidas usando DISPOSITIVOS ELÉCTRICOS (TRANSDUCTORES).
Los valores (u, v) varían de punto a punto en la placa, es decir son FUNCIONES de las COORDENADAS (x, y) de LOS PUNTOS INICIALES (PUNTOS DE LA PLACA ANTES DE
LA DEFORMACIÓN): ( ) ( ) UNICOvu,∃yx,∀
u = u(x, y); v = v(x, y) Definición) Las funciones u = u(x, y); v = v(x, y) que caracterizan los
desplazamientos de puntos materiales durante la deformación de un elemento, definen un CAMPO DE DESPLAZAMIENTOS, (en este caso, un campo Bidimensional).
De manera similar, en problemas tridimensionales, un campo de desplazamientos, se definirá por:
u = u(x, y, z) desplazamiento en dirección x
v = v(x, y, z) desplazamiento en dirección y
w = w(x, y, z) desplazamiento en dirección z
En cualquier caso, las FUNCIONES ADMISIBLES para un campo de Desplazamientos son FUNCIONES de POSICIÓN, y deben cumplir requisitos de continuidad y de derivabilidad. Nota) Todo Campo de Desplazamientos define una Función Vectorial.
B'
L
y
A
x
B
ji vud
)v,u(d
ensionaldimBi
oblemaPr
A
A
P
A'
Ad
Bd A
A'
u
v
CUADRÍCULALA POR
FORMADOS ELEMENTOS
LOS DE ESDISTORSIONMATERIALES PUNTOS
DE ENTOSDESPLAZAMI
comprende placa la de ndeformació La

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
70
Ejemplo: El vector = 10-2[x2 + (x + 3z) + 10 ] pies representa un Campo de
Desplazamientos. Hallar el desplazamiento que experimenta un punto
material ubicado inicialmente en la posición y determinar la
posición final.
Punto final:
Campo de Desplazamientos: u =10-2x2; v = 10-2(x + 3z); w = 10-2(10)
1.9) Deformaciones Unitarias (Normal y Cortante)
Consideremos en un SÓLIDO BIDIMENSIONAL DEFORMABLE, un punto material A, y dos segmentos infinitesimales inicialmente ortogonales.
u
r
1r
x
P
P'
y
z
MIENTOS
ADESPLAZ
VECTOR
INCIAL
POSICIÓN
EN VECTOR
POSICIÓN
VECTOR
NUERVO
urr1
u i j k
kjr
O
El vector u depende de las coordenadas iniciales del punto P(0, 1, 1).
u = 10-2[0i + (0 + 3)j + 10k ]
u =
u
100
3j +
v
10
1k Vector Desplazamiento
u
r
1r
x
P(0,1,1)
P'
y
z
urr1
)k10
1 j
100
3 i 0()k1 j1 i 0(r1
k10
11 j
100
103 i 0r1 )'OP(
A
y
x x
y
x' y'
y'
x'
A'
Luego de la deformación, el punto A ocupa la posición A'. Los segmentos CAMBIAN de longitud y DEJAN de ser perpendiculares.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
71
Cuando el sólido se deforma, el punto A se desplaza hasta A'; los segmentos se alargan o contraen y rotan los ángulos y .
1.9.1) Definiciones
*) Al valor cuando existe, se le denomina DEFORMACIÓN UNITARIA EN
DIRECCIÓN x:
x = . . . . (1)
De manera similar se define la DEFORMACIÓN UNITARIA EN DIRECCIÓN y:
y = . . . . (2)
Las ecuaciones (1) y (2) pueden escribirse:
x = ; y =
De manera general:
L: cualquier dirección Notas) 1) Las deformaciones unitarias están asociadas con el CAMBIO DE LONGITUD
de un SEGMENTO DE RECTA con RELACIÓN a su LONGITUD INICIAL. 2) Las deformaciones unitarias, evaluadas en un punto y en una dirección, nos
indican el CAMBIO DE LONGITUD por UNIDAD DE LONGITUD de un segmento de recta.
3) Las deformaciones unitarias son ADIMENSIONALES.
4) Si x > 0 ALARGAMIENTO (en la dirección x)
Si x < 0 ACORTAMIENTO (en la dirección x)
A
y
x x
y
x'
y'
x'
A'
y'
ESTADO DEFORMADO
ESTADO NO DEFORMADO
DEFORMACIÓN: )'y,'x()y,x( T
x
x'xlím
0x
x
x'xlím
0x
y
y'ylím
0y
dx
dx'dx
dy
dy'dy
LLINICIAL LONGITUD
LONGITUD DE CAMBIOS
UNITARIA
NDEFORMACIÓ

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
72
**) Se denomina DEFORMACIÓN UNITARIA CORTANTE (DISTORSIÓN) al cambio del ángulo recto entre dos segmentos que inicialmente eran ortogonales. Esta deformación es una medida de la pérdida de perpendicularidad entre dos segmentos.
En general xy = + (radianes) Convenio: Si xy > 0 EL ÁNGULO RECTO INICIAL DISMINUYE
Si xy < 0 EL ÁNGULO RECTO INICIAL AUMENTA
Notas) 1) En un punto de un sólido existen infinitas deformaciones cortantes, cada una
de ellas está asociada con un par de segmentos inicialmente ortogonales.
2) Las deformaciones unitarias definidas tienen analogías para el caso
tridimensional.
A x
y
/2 x'
y'
xy > 0
xy < 0
P s
r
y x
xy ; rs ; etc.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
73
1.9.2) Propiedades de x, y, xy
i) Los valores x, y, xy (que generalmente varían de un punto a otro del sólido) son
una medida de la deformación del sólido. Las deformaciones unitarias normales (x, y), evaluadas en un punto, y
multiplicadas por las longitudes iniciales, nos dan el cambio de longitud en una dirección específica (salvo infinitésimos de orden superior)
En efecto: x = (definición)
x + = (propiedad de un límite 0)
Luego x x + = x' – x
Con aproximación suficiente: x x x' – x
De manera similar: y y = y' – y cambio en dirección y
z z = z' – z cambio en dirección z
ii) La deformación cortante representa la DISTORSIÓN ANGULAR del elemento, con
respecto a direcciones inicialmente ortogonales.
A
dy
dx dz
z
y
x
A'
dx' dz'
dy'
z'
y'
x'
Ad
inicial). longitud la a
respecto longitud de Cambio(
.INGENIERÍA DE UNITARIAS
NESDEFORMACIO sDenominada
dz
dz'dzdy
dy'dydx
dx'dx
NORMALES
UNITARIAS
NESDEFORMACIO
z
y
x
dz dy, LADOS LOS ENTRE RECTO DE CAMBIO:
dz dx, LADOS LOS ENTRE RECTO DE CAMBIO:
dy dx, LADOS LOS ENTRE RECTO DE CAMBIO :
CORTANTE
DE
NESDEFORMACIO
yz
xz
xy
x
x'xlím
0x
x
x'x
superiororden de
)x)((
xDIRECCIÓN EN
LONGITUD
DE CAMBIO
xDIRECCIÓN
EN INICIAL
LONGITUD
xDIRECCIÓN
ENUNITARIA
NDEFORMACIÓ

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
74
Nota) En la gran mayoría de CASOS, deberá establecerse una RELACIÓN DIRECTA
entre x, y, xy y las componentes del Vector Desplazamientos. Así, por ejemplo: consideremos una varilla en la cual la deformación unitaria axial es constante en todos sus puntos.
x =
x = = x =
(x = u / L)
(Implica deformaciones unitarias normales constantes en dirección x).
Si las deformaciones unitarias x no son constantes, deberán evaluarse según la definición:
Notas)
i) Para ambas posibilidades (x variable o constante) el valor L es la suma de los cambios de longitud de todos los segmentos individuales que puedan ser considerados.
ii) La expresión x = puede representarse
Luego (dx) = x dx El cambio total de longitud podrá evaluarse por una integral definida:
u
x
puntos con la misma deformación unitaria (x)
L
Configuración inicial
y
L + L u: desplazamiento del extremo libre.
Configuración deformada
inicial longitud
inicial longitud final Longitud
L
LLL x de Promedio Valor
L
L
L
x
x'xLím
0xx
L
x'
x x
Deformación Unitaria Axial, en un punto del eje de la varilla.
L
L
dx
)dx(
)dx(x
inicial
dx+(dx)
final
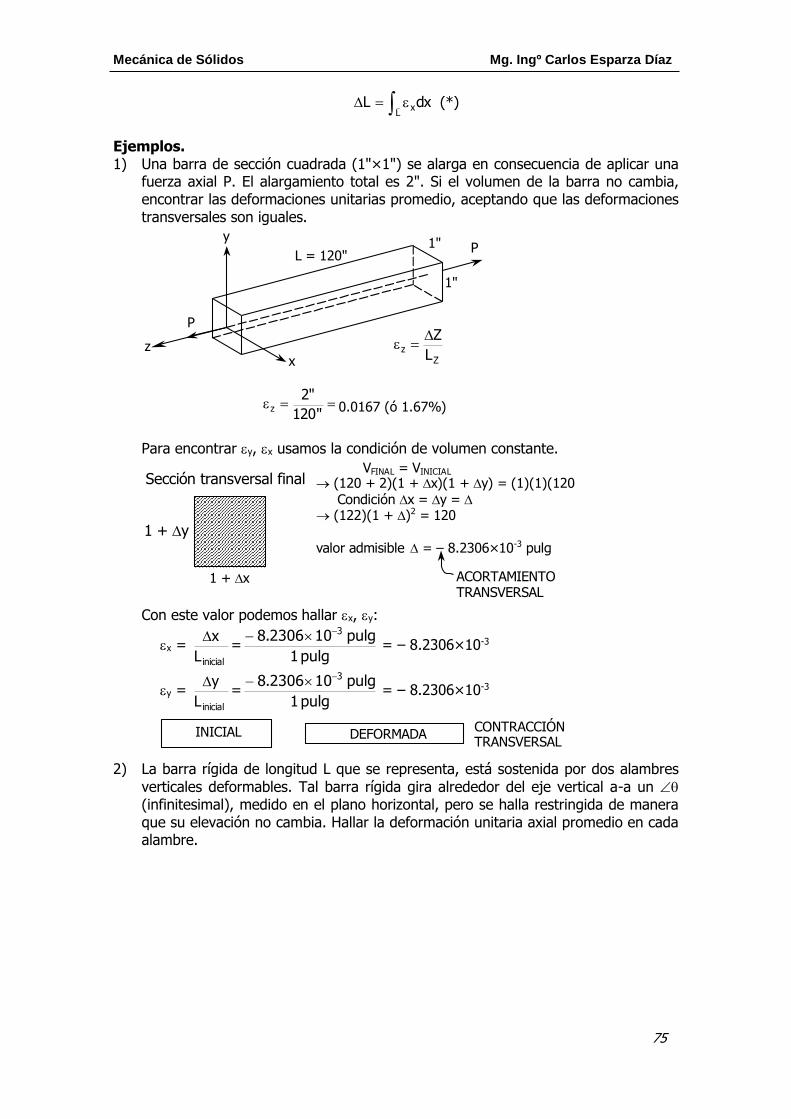
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
75
(*)
Ejemplos. 1) Una barra de sección cuadrada (1"×1") se alarga en consecuencia de aplicar una
fuerza axial P. El alargamiento total es 2". Si el volumen de la barra no cambia, encontrar las deformaciones unitarias promedio, aceptando que las deformaciones transversales son iguales.
Para encontrar y, x usamos la condición de volumen constante.
Con este valor podemos hallar x, y:
x = = = – 8.2306×10-3
y = = = – 8.2306×10-3
2) La barra rígida de longitud L que se representa, está sostenida por dos alambres
verticales deformables. Tal barra rígida gira alrededor del eje vertical a-a un (infinitesimal), medido en el plano horizontal, pero se halla restringida de manera que su elevación no cambia. Hallar la deformación unitaria axial promedio en cada alambre.
L
xdxL
P
z x
y P 1"
1"
L = 120"
Zz
L
Z
"120
"2z 0.0167 (ó 1.67%)
1 + y
1 + x
VFINAL = VINICIAL (120 + 2)(1 + x)(1 + y) = (1)(1)(120) Condición x = y = (122)(1 + )2 = 120
valor admisible = – 8.2306×10-3 pulg
ACORTAMIENTO TRANSVERSAL
Sección transversal final
inicialL
x
pulg 1
pulg 102306.8 3
inicialL
y
pulg 1
pulg 102306.8 3
INICIAL DEFORMADA CONTRACCIÓN TRANSVERSAL
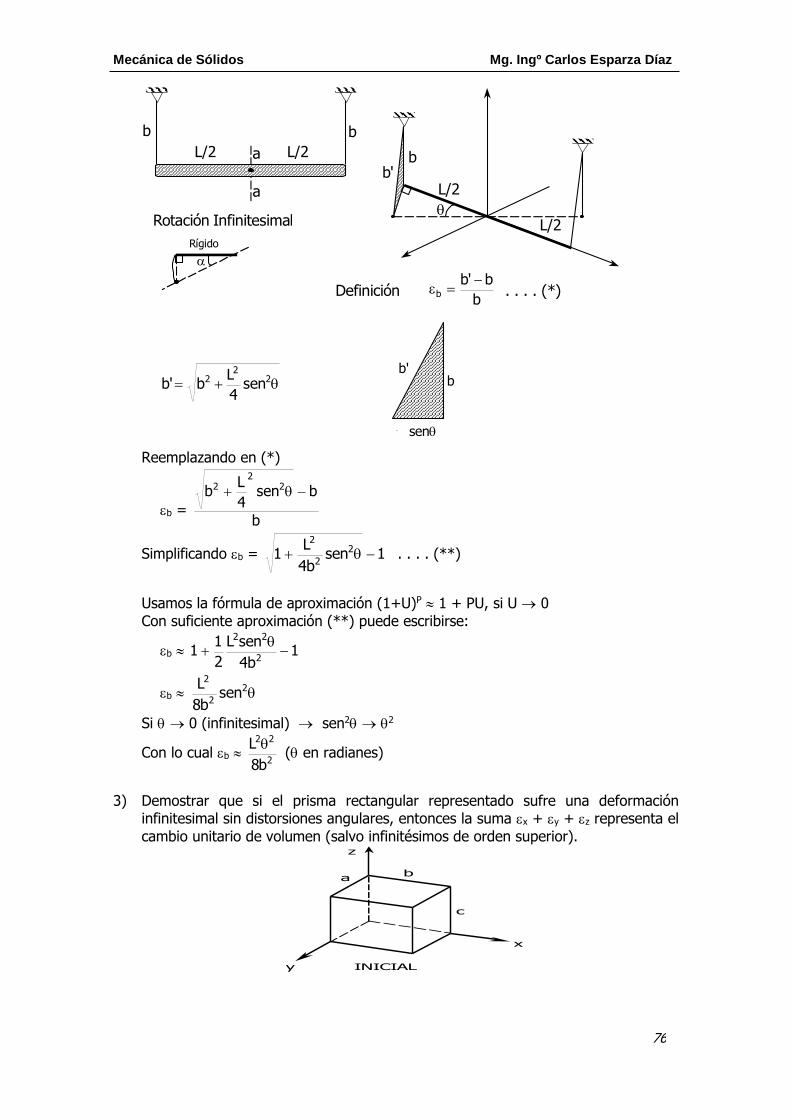
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
76
Reemplazando en (*)
b =
Simplificando b = . . . . (**)
Usamos la fórmula de aproximación (1+U)P 1 + PU, si U 0
Con suficiente aproximación (**) puede escribirse:
b
b
Si 0 (infinitesimal) sen2 2
Con lo cual b ( en radianes)
3) Demostrar que si el prisma rectangular representado sufre una deformación
infinitesimal sin distorsiones angulares, entonces la suma x + y + z representa el
cambio unitario de volumen (salvo infinitésimos de orden superior).
b b
a
a
L/2
Rotación Infinitesimal
Rígido
L/2
L/2 b'
b
Definición b
bb'b
. . . . (*)
L/2
22
2 sen4
Lb'b b
b'
2L
sen
b
bsen4
Lb 2
22
1senb4
L1 2
2
2
1b4
senL
2
11
2
22
22
2
senb8
L
2
22
b8
L
a b
c
z
x
y INICIAL

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
77
Volumen inicial Vo = abc
Puesto que no hay distorsiones angulares, luego de la deformación el sólido sigue siendo un prisma rectangular (sólo cambian las longitudes de las aristas).
Cambio Unitario de Volumen
Reemplazando
Simplificando
Con suficiente aproximación
Nota) La deformación de un sólido sin distorsiones angulares se denomina
DILATACIÓN. La suma x + y + z se denomina Deformación Cúbica (Deformación Volumétrica Unitaria). Expresa el cambio de Volumen por Unidad de Volumen.
PROBLEMAS 1) La placa ABC sufre la deformación representa. Calcular:
i) La deformación unitaria promedio en dirección OB. ii) La deformación unitaria promedio en dirección AB. iii) La deformación cortante entre los borde AB y BC
a1 b1
c1
z
x
y
Volumen Final V1 = a1b1c1
Deformaciones Unitarias Promedio
b
bb1x
b1 = b(1 + x)
a
aa1y
a1 = a(1 + y)
c
cc1z
c1 = c(1 + z)
INICIAL
INICIALFINAL
V
VV
V
V
abc
abc)1)(1)(1(abc
V
V zyx
abc
abc)1(abc
V
V zyxzxzyyxzyx
superior orden de initesimosinf
zyxzxzyyxzyxV
V
zyxV
V

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
78
AB =
AB = 1.25×10-3
iii) AB/BC =
AB/BC =
AB/BC = 0.002497 Radianes. (Valor positivo que indica una disminución del ángulo recto).
2) Calcular las deformaciones unitarias promedio en los elementos BC y AC. Se conoce que los puntos B y C tienen los desplazamientos siguientes:
= – 8.33×10-4
=
AC = 2.062×10-4 (ALARGAMIENTºO)
i) OB
OBOB'OB
(definición de )
120
1203.0120OB
= 2.5×10-3
ii) AB
ABAB'AB
120 mm 120 mm
o A C
B
B'
y
x
0.3 mm
22
2222
120120
120120)3.0120()120(
) de n(Definició O'AB22
(inicial) recto dellaridadperpendicu de Pérdida
3.0120
120arctan2
2C'AB2
2
0v
2".0u B
"08.0v
2"1.0u C
8'
8'
C B
A D
x
y
C B
A
B'
C'
96"
96"
v=–0.08"
u=0.12" u=0.2"
BC
BC'C'BBC
96
96)08.0()12.02.096( 22
BC
AC
AC'ACAC
296
296)08.096()12.096( 22
BC

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
79
3) El nudo A de la armadura representada desciende unidades (infinitesimal).
Calcular la deformación unitaria axial promedio en cada barra.
En la armadura dada: debido a la SIMETRÍA TOTAL, el punto A se desplaza verticalmente.
1 = cos; 2 = cos
(Deformación unitaria axial en la barra 1)
Similar para la barra 2.
4) La barra rígida AC, en posición horizontal, está soportada por tres barras delgadas
deformables, según se indica en el esquema. Una fuerza P y un momento M ocasionan que la barra rígida descienda 1 pulg. y que gire 2° alrededor del punto B. Determinar las deformaciones unitarias promedio que se inducen en las barras. (Las distancias están expresadas en pies).
P
1)
A
2)
A'
DESCENSO DEL PUNTO A (NO ALARGAMIENTO DE BARRA)
2 alargamiento de la barra (2)
1 alargamiento de la barra (1)
1)
A
2)
A'
2 1
cosLL
LcosL
L
LL 11
cosL
2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
80
La barra rígida NO SE DEFORMA, sólo se desplaza y rota.
Con aproximación suficiente 1 = 1 + 120 2
2 = 1 – 180 2
3 = 1 – 240 2
1 = 1 +
2 = 1 –
3 = 1 –
A C B
P
M
10 5 5
10
barra rígida
A C
C'
A'
1
2°
1 – 1
B
B'
1 – 2 1 – 3
3 2 1"
1) (2 (3
Nota) La barra rígida AC gira en el mismo sentido que el momento M.
RECORDAR: tan si 0 ( en radianes)
1 – 1 = 120tan2° 2 – 1 = 180tan2°
1 – 3 = 240tan2°
360
2
360
2
360
2
3
4
3
2
3
4
Luego:
1201
1
= 0.0432 (verificar operaciones)
)TOSACORTAMIEN(
0266.0120
0091.0120
33
22
B
B'
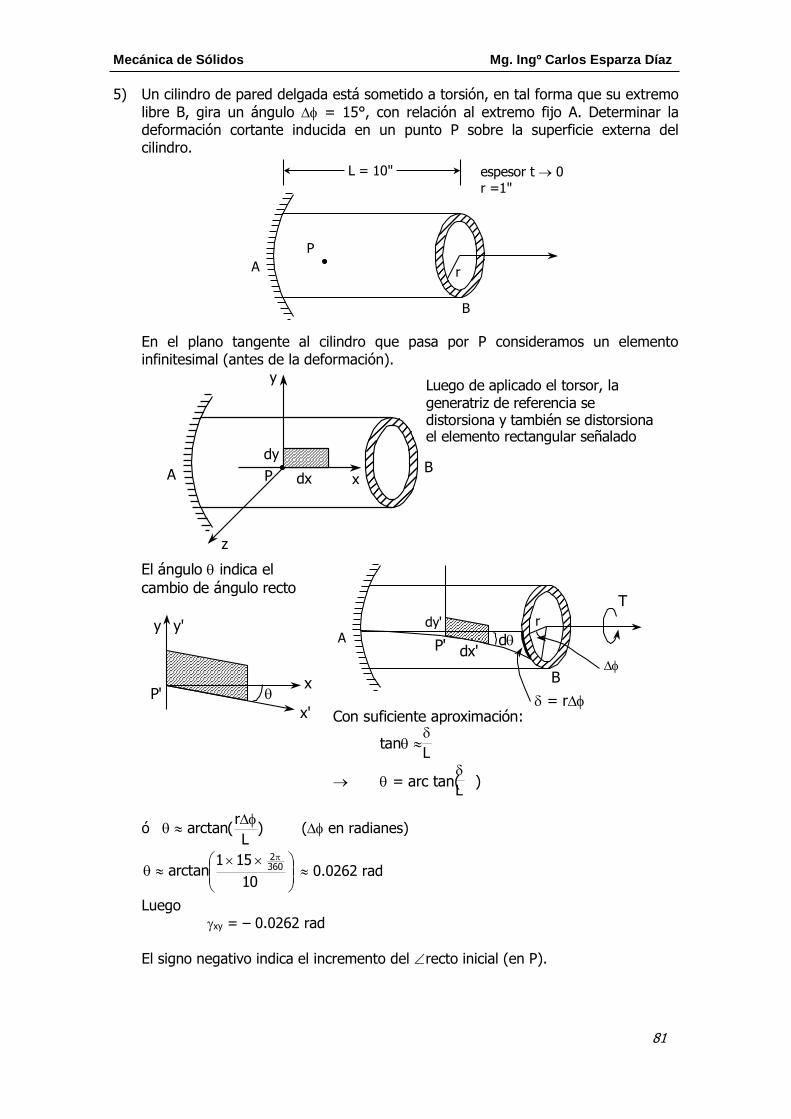
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
81
5) Un cilindro de pared delgada está sometido a torsión, en tal forma que su extremo
libre B, gira un ángulo = 15°, con relación al extremo fijo A. Determinar la deformación cortante inducida en un punto P sobre la superficie externa del cilindro.
En el plano tangente al cilindro que pasa por P consideramos un elemento infinitesimal (antes de la deformación).
ó ( en radianes)
0.0262 rad
Luego xy = – 0.0262 rad
El signo negativo indica el incremento del recto inicial (en P).
r
L = 10"
A
P
B
espesor t 0 r =1"
z
y
x P A B
dy
dx
Luego de aplicado el torsor, la generatriz de referencia se distorsiona y también se distorsiona el elemento rectangular señalado
P' A
B
dy'
dx' d
r
T
= r
El ángulo indica el
cambio de ángulo recto
P'
y y'
x
x'
Con suficiente aproximación:
tan L
= arc tan(L
)
)L
rarctan(
10
151arctan 360
2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
82
6) En un sólido deformable, el campo de desplazamientos está definido por las ecuaciones: u=2ax2; v=2ay2; w=-2az2, donde a=10-5. Determinar la deformación normal unitaria en el punto P (0, 2, -1) medida en la dirección del vector
N = (8i – j + 4k )/9.
Se determinan las coordenadas del punto Q:
x – 0 = 8/9; y – 2 = - 1/9 z + 1 = 4/9 Obtenemos: x = 8/9 y = 17/9 z = -5/9
Como son conocidas las ecuaciones del campo de desplazamientos y las coordenadas de los puntos extremos del vector PQ, determinamos los puntos P’ y Q’. Coordenadas del punto Q’: x = 8/9 + 2a (8/9)2 x = 0.888905 y = 17/9 + 2a (17/9)2 y = 1.888960 z = - 5/9 - 2a (- 5/9)2 z = -0.555562 Q’ (0.888905, 1.888960, -0.555562) La distancia entre los puntos P’ y Q’ es: P’Q’ = 1.0000215 La distancia entre los puntos P y Q es PQ = 1
Por tanto la deformación unitaria es ( ) 15.00002.0=PQ
PQ¬'Q'P=ε
NP
Nota) En algunos problemas es conveniente usar aproximaciones numéricas, cuando
las deformaciones son de carácter infinitesimal. ) (1 + U)n 1 + nU, si U 0 (Aproximación Binomial)
(n es cualquier numero real).
PO(8/9, -1/9, 4/9) )
N
Q (x,y,z) N P(0, 2, -1)
Q’
Q
P’
P
Ecuaciones del Campo de desplazamientos: u=2ax2 v=2ay2
w=-2az2, donde a=10-5. Coordenadas del punto P0
(8/9, -1/9, 4/9)
Coordenadas del punto P’: x = 0 + 2a (0) = 0 y = 2 + 2a (2)2 = 2 + 8a z = -1 – 2a (-1)2 = -1 – 2a P’ (0, 2.00008, - 1.00002=)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
83
) (1 + U)(1 + V) 1 + U + V, si U, V 0
) sen ; tan ; cos 1 si 0
En particular: (1 + U)2 = 1 + 2U
(1 + U)1/2 = 1 + U
(1 + U)–1 = 1 – U; etc. Estas aproximaciones simplifican el cálculo numérico de las deformaciones unitarias normales y cortantes.
EJEMPLOS 1) Una fuerza que actúa en la palanca representada provoca que la palanca gire en
sentido horario un ángulo de 0.002 rad. Determinar la deformación unitaria normal promedio en el alambre BC.
Desplazamientos del punto
Como 0
CB' 2L(1 + )1/2 Aproximación binomial
CB' 2L(1 + ) 2L + L
Deformación unitaria CB =
CB = = 0.001 (Deformación promedio)
Nota) El estiramiento del alambre es L sen L
CB = = 0.001 (Recordar ).
2) Una fibra AB tiene longitud L y orientación . Sus extremos A y B experimentan
desplazamientos infinitesimales uA y vB, respectivamente. Demostrar que, cuando la fibra adopte la posición A'B', se genera una deformación unitaria normal.
21
El ángulo indica el
cambio de ángulo recto
L 2L
C
A
B
P
C
A
B
B'
= 0.002 rad
cosLLv
senL u B
cos2sen46L)cosLL()LsenL2('CB 22
246L'CB 44L'CB
21
2L2
L2LL2
CB
CB'CB
2
002.0
2L2
L
L
L
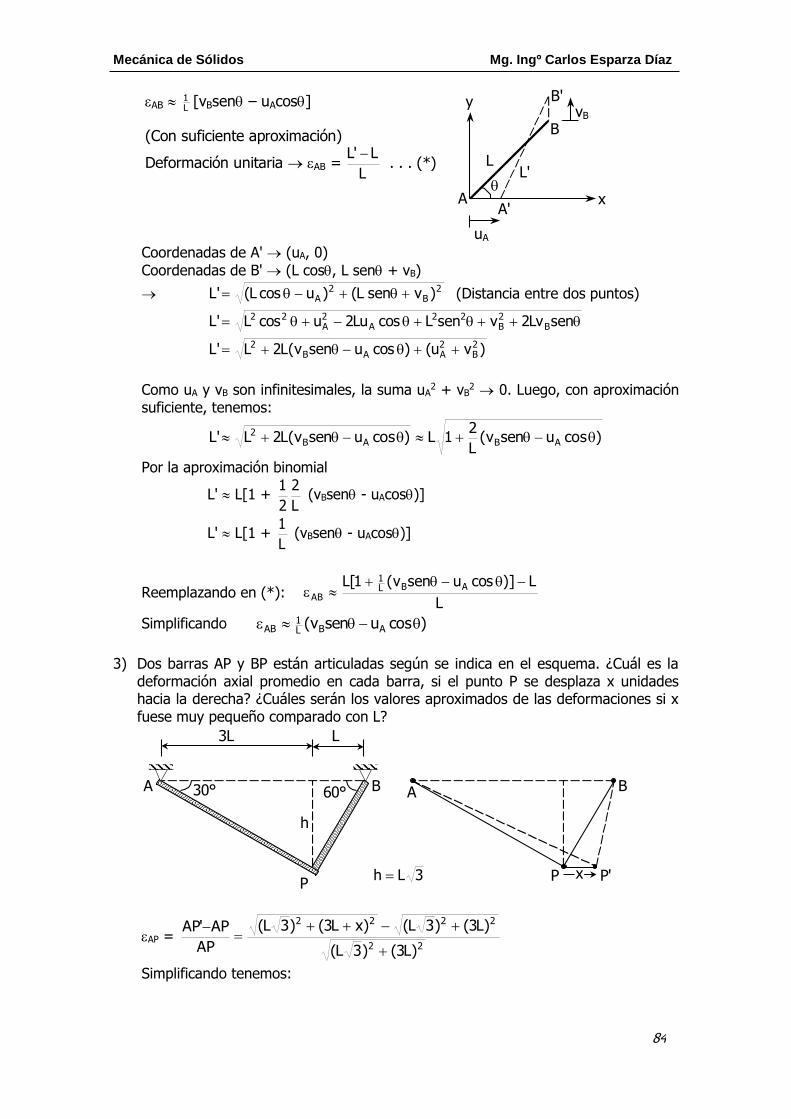
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
84
Coordenadas de A' (uA, 0)
Coordenadas de B' (L cos, L sen + vB)
(Distancia entre dos puntos)
Como uA y vB son infinitesimales, la suma uA2 + vB
2 0. Luego, con aproximación suficiente, tenemos:
Por la aproximación binomial
L' L[1 + (vBsen - uAcos)]
L' L[1 + (vBsen - uAcos)]
Reemplazando en (*):
Simplificando
3) Dos barras AP y BP están articuladas según se indica en el esquema. ¿Cuál es la
deformación axial promedio en cada barra, si el punto P se desplaza x unidades hacia la derecha? ¿Cuáles serán los valores aproximados de las deformaciones si x fuese muy pequeño comparado con L?
AP =
Simplificando tenemos:
A
A'
uA
vB B
B'
L L'
x
y AB L1 [vBsen – uAcos]
(Con suficiente aproximación)
Deformación unitaria AB = L
LL' . . . (*)
2B
2A )vsen L()ucosL('L
senLv2vsenLcosLu2ucosL'L B2B
22A
2A
22
)vu()cosusenv(L2L'L 2B
2AAB
2
)cosusenv(L
21L)cosusenv(L2L'L ABAB
2
L
2
2
1
L
1
L
L)]cosusenv(1[L ABL1
AB
)cosusenv( ABL1
AB
30° 60°
P
A B
h
3L L
P
A B
P' x 3Lh
22
2222
)L3()3L(
)L3()3L()xL3()3L(
AP
AP'AP

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
85
AP =
AP =
Aproximación: Si x es pequeño comparado con L .
Luego:
Aproximación Binomial
BP
BP
Aproximación de 1er orden ( 0)
BP
Aproximación Binomial:
BP
4) Una placa delgada, en forma de rectángulo isósceles, está sometida a una
deformación, de manera que sus catetos experimentan la deformación unitaria 1 y
la hipotenusa, la deformación unitaria – 2. i) Demostrar que, con aproximación suficiente, la deformación unitaria de la
altura del , es h 21 + 2.
ii) Demostrar que, con aproximación suficiente, la distorsión del ángulo recto, es
2(1 + 2), radianes.
3L2
3L2xxL6L9L3 222
32L
x
L
x612
32
1
3L2
32L
x
L
x612L
2
22
2
0L
x
32
L12
x6112
32
1AP
1
L12
x6132
32
1AP
1L12
x61AP
1L12
x6
2
11AP
L2
L2L3Lx2xL
)3L(L
)3L(L)3L()xL( 222
22
2222
2
L
x
L
x24
2
1L2xLx2L4
L2
1 222
L
x
1L4
x212
L4
x214
2
1
L4
x1)
L4
x2(
2
11

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
86
i) Deformación unitaria de los catetos:
a' = a1 + a = a(1 + 1)
Deformación unitaria de la hipotenusa:
z' = z – 2z = z(1 – 2)
z' = a (1 – 2)
Deformación unitaria de la altura h . . . . (*)
1ra aproximación se desprecian los infinitésimos de orden superior:
2da aproximación aproximación binomial
Reemplazando en (*):
; simplificando obtenemos
h 21 + 2
ii)
2
ah
a a h
2az
z'
h' a a
h
a' a'
a
a'a1
z
z'z2
2
h
h'hh
2
22
12 )1(
2
2a)1(a'h
)(2a21a'h 222
121212
12
222
1
2
1211
)(22412
a'h 2
2212
121
2/121 241
2
a'h
)21(2
a)24(1
2
a'h 21212
1
2
a2
a)21(
2
a21
h
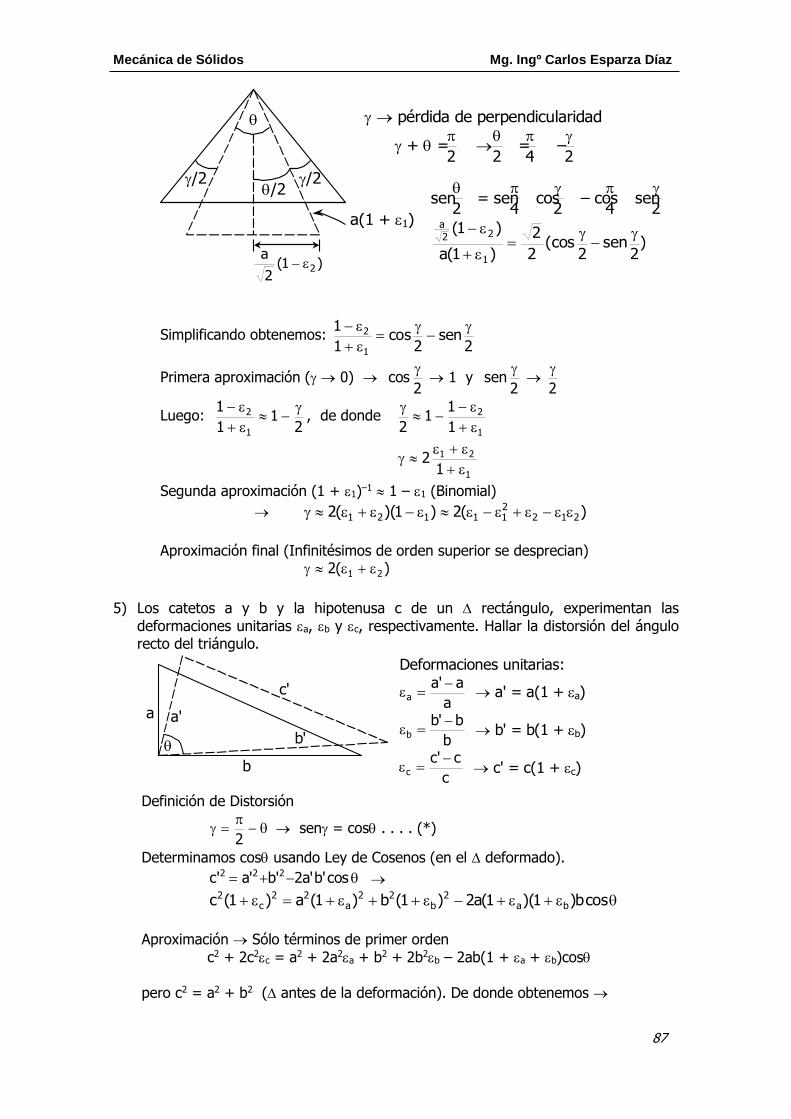
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
87
Simplificando obtenemos:
Primera aproximación ( 0) 1 y
Luego: , de donde
Segunda aproximación (1 + 1)–1 1 – 1 (Binomial)
Aproximación final (Infinitésimos de orden superior se desprecian)
5) Los catetos a y b y la hipotenusa c de un rectángulo, experimentan las
deformaciones unitarias a, b y c, respectivamente. Hallar la distorsión del ángulo recto del triángulo.
Definición de Distorsión
sen = cos . . . . (*)
Determinamos cos usando Ley de Cosenos (en el deformado).
Aproximación Sólo términos de primer orden
c2 + 2c2c = a2 + 2a2a + b2 + 2b2b – 2ab(1 + a + b)cos
pero c2 = a2 + b2 ( antes de la deformación). De donde obtenemos
)1(2
a2
/2 /2 /2
a(1 + 1)
pérdida de perpendicularidad
+ = 2
2
=
4
–
2
sen2
= sen
4
cos
2
– cos
4
sen
2
)2
sen2
(cos2
2
)1(a
)1(
1
22
a
2sen
2cos
1
1
1
2
2cos
2sen
2
21
1
1
1
2
1
2
1
11
2
1
21
12
)(2)1)((2 212211121
)(2 21
a
b
Deformaciones unitarias:
a
aa'a
a' = a(1 + a)
b
bb'b
b' = b(1 + b)
c
cc'c
c' = c(1 + c)
a'
b'
c'
2
cos'b'a2'b'a'c 222
cosb)1)(1(a2)1(b)1(a)1(c ba2
b22
a22
c2
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
88
Aproximación Binomial
Luego:
Aproximación Términos de primer orden. Obtenemos
Por tanto:
pero c2 = a2 + b2
, expresión que puede escribirse:
Por (*) (infinitesimal)
1.10) Relaciones Diferenciales entre Desplazamientos y
Deformaciones Unitarias. No siempre es posible relacionar directamente las deformaciones unitarias normales y cortantes con los desplazamientos de los sólidos en estudio. De manera general, es
conveniente relacionar analíticamente las deformaciones unitarias x, y, xy con las componentes u, v del vector desplazamiento.
Analizaremos el caso bidimensional, para deformaciones infinitesimales (x, y, xy 0) En un cuerpo bidimensional no deformado, consideremos dos segmentos ortogonales e infinitesimales (AB y AC), orientados en las direcciones x, y respectivamente. Durante la deformación, los segmentos AB y AC se alargan o contraen y rotan. Los puntos A, B y C se desplazan hasta A', B', C'.
ba
c2
b2
a2
1
cbacosab
ba1
baba
1)1(1
1
)1)(cba(cosab bac2
b2
a2
c2
b2
a2 cbacosab
c
2
bac
2b
2a
2
ab
c
a
b
b
a
ab
cbacos
c
22
baab
ba
a
b
b
acos
ccbaa
b
b
a
a
b
b
acos
)(b
a)(
a
bcos cacb
angularDistorsión
cacb )(b
a)(
a
bsen

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
89
Por la hipótesis de las deformaciones infinitesimales:
, 0 cos, cos 1 ; tan ; sen
tan ; sen
Aproximaciones de la función coseno:
A'C' dy + ; A'B' dx +
Sin incluir infinitésimos de orden superior, las deformaciones unitarias se expresan por:
de donde: . . . . (1)
De manera similar:
. . . . (2)
La deformación cortante, se expresa por xy = + (rad)
Aproximación de la función tangente:
Teniendo en cuenta las ecuaciones (1) y (2)
xen cambio
al debido
Vde cambio
dxx
v
dyy
vdy
dxx
udx
A
dy
dx
x
y
x
y
A'
C'
B'
B
C
u
v
yen cambio al debido
u en cambio dy
y
u
Ad
dyy
v
dx
dxdxx
udx
AB
AB'B'Ax
x
ux
dy
dydyy
vdy
AC
AC'C'Ay
y
vy
y
v1
y
u
x
u1
x
v
dyy
vdy
dyy
u
dxx
udx
dxx
v
xy
dx x
u

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
90
. . . . (3)
En el caso de deformaciones pequeñas x y y 0. Luego con suficiente aproximación:
. . . . (3.1)
Definiciones) Las ecuaciones (1), (2), (3.1) definen RELACIONES DIFERENCIALES
entre x, y, xy y las COMPONENTES u, v del VECTOR DESPLAZAMIENTOS. Son válidas para problemas bidimensionales que involucran deformaciones infinitesimales. Las ecuaciones (1), (2) y (3.1) se denominan ECUACIONES DE CAUCHY. Puede demostrarse que NO SON TOTALMENTE INDEPENDIENTES. Notas) i) Las ecuaciones (1), (2), (3.1) son válidas INDEPENDIENTEMENTE DEL MATERIAL
DEL SÓLIDO.
(ÚNICA RESTRICCIÓN x, y, , 0) ii) Conocido el campo de desplazamientos.
u = u(x, y); v = v(x, y), por derivación parcial se determina x, y, xy.
Recíprocamente, conocidos x, y, xy por integración pueden encontrarse las ecuaciones del campo de desplazamientos.
iii) De obtenemos . . . . (i)
De obtenemos . . . . (ii)
De obtenemos . . . . (iii)
Reemplazando (i) y (ii) en (iii):
. . . . (vi)
Denominada ECUACIÓN DE COMPATIBILIDAD DE LAS DEFORMACIONES UNITARIAS NORMALES Y CORTANTE (Ecuación de Saint-Venant). En consecuencia, un campo de desplazamientos NO PUEDE definirse por funciones u, v totalmente arbitrarias. Las funciones u, v son funciones condicionadas.
Definiciones) Las funciones u, v consistentes con las ecuaciones (1), (2), (3.1) se denominan FUNCIONES ADMISIBLES para un Campo de Desplazamientos Bidimensional. iv) Las expresiones deducidas para el caso bidimensional pueden ser extendidas para
Problemas Tridimensionales.
yxxy
1
y
u
1x
v
y
u
x
vxy
x
ux
xy
u
y 2
3
2x
2
y
vy
yx
v
x 2
3
2
y2
x
v
y
uxy
2
3
2
3xy
2
xy
v
yx
u
xy
2
y2
2x
2xy
2
xyxy

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
91
EJEMPLOS 1) Los puntos de un sólido sufren desplazamientos dados por:
u = 4ay2 + 2ax2 + az2 . Encontrar las deformaciones normales y cortantes en
un punto genérico Q(x, y, z).
Deformaciones Normales: ; ;
Deformaciones Cortantes:
2) Una varilla delgada de longitud L tiene un extremo fijo O.
i) Si sus puntos se desplazan en dirección x mediante , hallar la máxima
deformación unitaria normal.
ii) Si la deformación unitaria normal es , hallar el cambio total de
longitud.
)z,y,x(ww
)z,y,x(vv
)z,y,x(uu
entosDesplazami
de Campo
z dirección en z
w
ydirección en y
v
xdirección en x
u
NORMALES
UNITARIAS
NESDEFORMACIO
z
y
x
yzplano el en z
v
y
w
xzplano el en z
u
x
w
xyplano el en x
v
y
u
CORTANTES
NESDEFORMACIO
yz
xz
xy
i j k
2
2
2
azw
ax2v
ay4u
entosDesplazami
de Campo
0x
ux
0
y
vy
az2
z
wz
ax4ay8x
v
y
uxy
000z
u
x
wxz
000z
v
y
wyz
L400
xu
2
L2
xcos10 4
x
u: desplazamiento según eje x v: desplazamiento según eje y w: desplazamiento según eje z

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
92
(x)máx =
se presenta en el extremo libre (x = L).
ii) Alargamiento total: Usamos
(en unidades de L)
3) Una placa de espesor uniforme 1" y forma parabólica, es de un material cuyo peso específico es 400 lb/pie3. Si la deformación unitaria en dirección vertical es
, siendo E una constante (E = 2×107 lb/pulg2), hallar la DEFLEXIÓN que
experimenta el vértice A por efectos del peso propio.
L x
i) De L400
xu
2
obtenemos L200
x
x
ux
x
(L, x máx)
L x
o
200
1
L200
x
Lx
L
xdxL
finalizar al
1.9.2 sección
(*) ecuaciónVer
L
0
4 dxL2
xcos10L
L
0
4
L2
xsen
L210L
L2
10L 4
yyE
1
Apunto
del vertical
DeflexiónAV
10'
3'
A
y
x
A
A'
-x
y
x
10 – y
y
x 10 – y
e=1"
W
2x y
e = 1/12'

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
93
(en lb/pie2)
Simplificando (compresión)
Luego, la deformación unitaria es:
El Cambio Total de longitud, es:
= 4.63×10-6 pies descenso del punto A.
= 4.63×10-6 pies
(Nota: La constante E debe ser expresada en lb/pie2)
4) Un campo de desplazamientos está dado por u = ky2; v = 0 (k>0).
i) Graficar la deformación del cuadrado unitario OABC. ii) Calcular la deformación cortante en el punto C(0, 1).
ii) xy en el punto C(0, 1).
Luego como + 1 = tan1 = cotan
))(x2(
)400)()(y10)(x2)((
121
121
32
y
)y10(3
800y
)y10(3
800
E
1y
10
0Ly dy)y10(
3
800
E
1dy
AV
0
(0,1) C B (1,1)
A (1,0)
y
x
i) Vectores desplazamiento
0d = (0,0)
Ad = (0,0)
Bd = (k,o)
Cd = (k,o)
y (v)
0 0' A A'
B' B k C' C
k
x (u)
(u,y) Parábolas (u = ky2)
C' C
1
tangente por C'
xy = (pérdida de )
'C
1du
dytan
k2
1
ky2
1tan
1y
1
k2
1tan 1
2
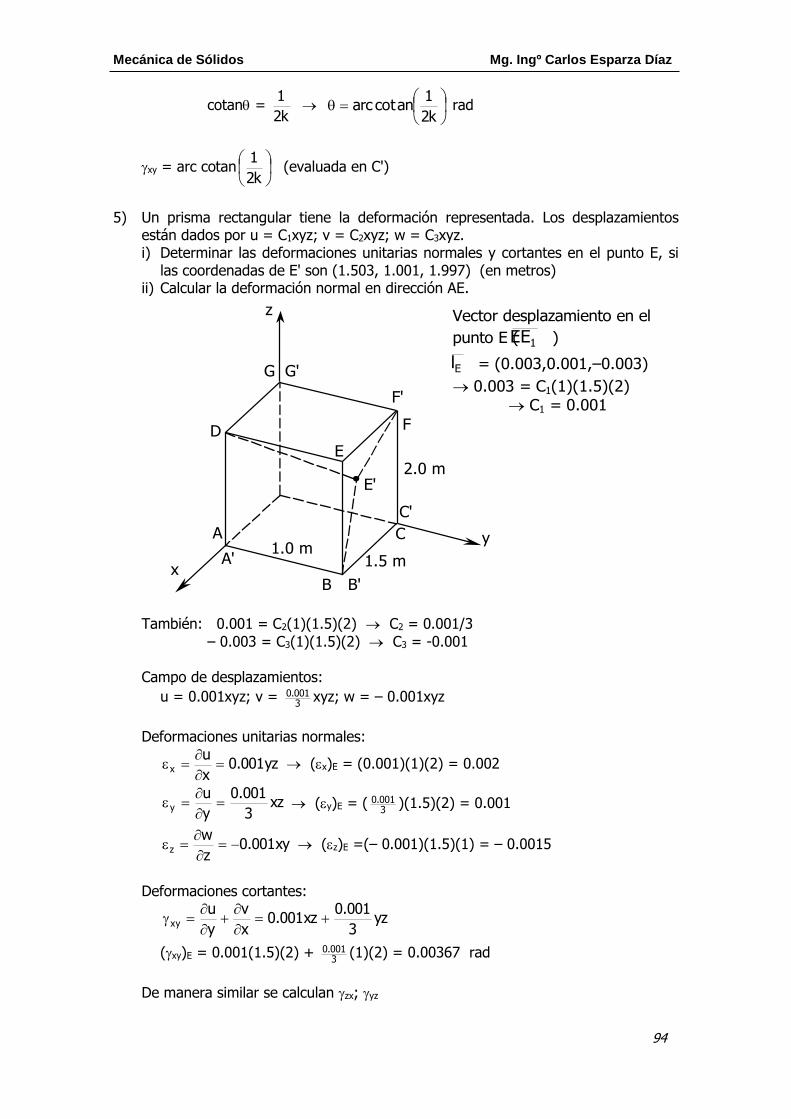
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
94
cotan = rad
xy = arc cotan (evaluada en C')
5) Un prisma rectangular tiene la deformación representada. Los desplazamientos
están dados por u = C1xyz; v = C2xyz; w = C3xyz. i) Determinar las deformaciones unitarias normales y cortantes en el punto E, si
las coordenadas de E' son (1.503, 1.001, 1.997) (en metros) ii) Calcular la deformación normal en dirección AE.
También: 0.001 = C2(1)(1.5)(2) C2 = 0.001/3
– 0.003 = C3(1)(1.5)(2) C3 = -0.001 Campo de desplazamientos:
u = 0.001xyz; v = xyz; w = – 0.001xyz
Deformaciones unitarias normales:
(x)E = (0.001)(1)(2) = 0.002
(y)E = ( )(1.5)(2) = 0.001
(z)E =(– 0.001)(1.5)(1) = – 0.0015
Deformaciones cortantes:
(xy)E = 0.001(1.5)(2) + (1)(2) = 0.00367 rad
De manera similar se calculan zx; yz
k2
1
k2
1ancotarc
k2
1
D
E
E'
z
y
x
G G'
F
F'
C
C'
A
A' 1.0 m
1.5 m
B B'
2.0 m
Vector desplazamiento en el
punto E ( 1EE )
Ed = (0.003,0.001,–0.003)
0.003 = C1(1)(1.5)(2) C1 = 0.001
3001.0
yz001.0x
ux
xz3
001.0
y
uy
3001.0
xy001.0z
wz
yz3
001.0xz001.0
x
v
y
uxy
3001.0
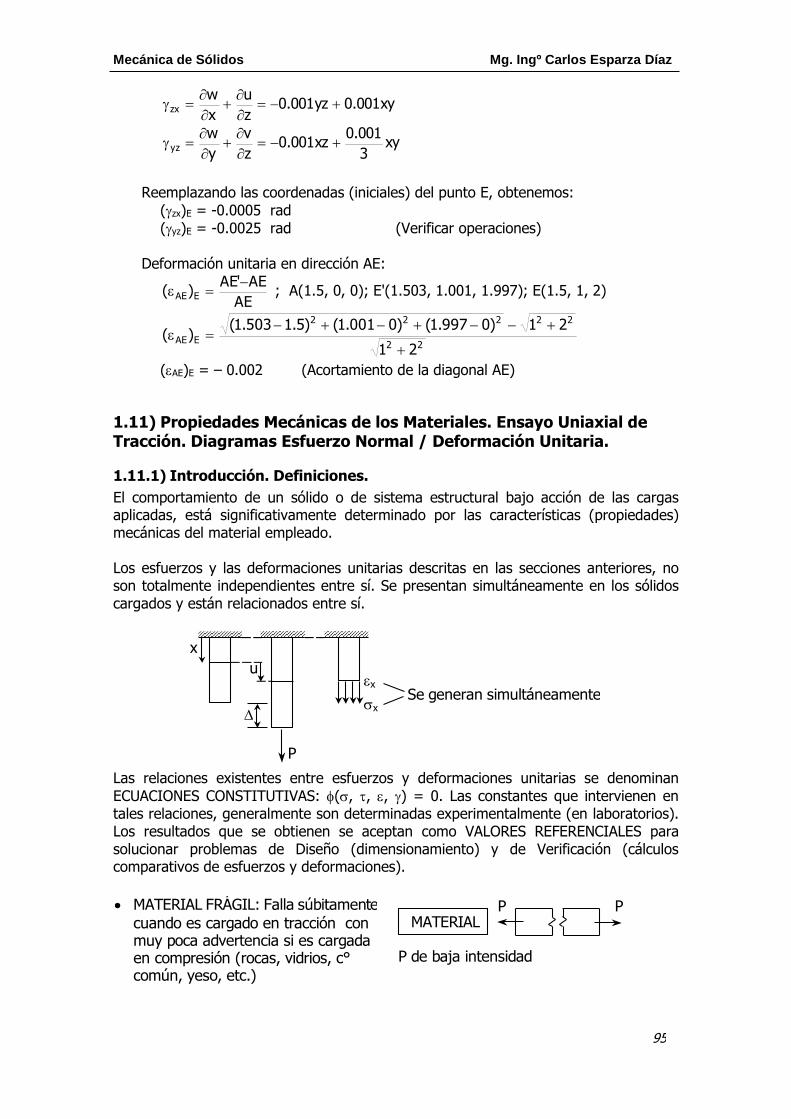
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
95
Reemplazando las coordenadas (iniciales) del punto E, obtenemos:
(zx)E = -0.0005 rad
(yz)E = -0.0025 rad (Verificar operaciones) Deformación unitaria en dirección AE:
; A(1.5, 0, 0); E'(1.503, 1.001, 1.997); E(1.5, 1, 2)
(AE)E = – 0.002 (Acortamiento de la diagonal AE)
1.11) Propiedades Mecánicas de los Materiales. Ensayo Uniaxial de Tracción. Diagramas Esfuerzo Normal / Deformación Unitaria.
1.11.1) Introducción. Definiciones.
El comportamiento de un sólido o de sistema estructural bajo acción de las cargas aplicadas, está significativamente determinado por las características (propiedades) mecánicas del material empleado. Los esfuerzos y las deformaciones unitarias descritas en las secciones anteriores, no son totalmente independientes entre sí. Se presentan simultáneamente en los sólidos cargados y están relacionados entre sí.
Las relaciones existentes entre esfuerzos y deformaciones unitarias se denominan
ECUACIONES CONSTITUTIVAS: (, , , ) = 0. Las constantes que intervienen en tales relaciones, generalmente son determinadas experimentalmente (en laboratorios). Los resultados que se obtienen se aceptan como VALORES REFERENCIALES para solucionar problemas de Diseño (dimensionamiento) y de Verificación (cálculos comparativos de esfuerzos y deformaciones).
xy001.0yz001.0z
u
x
wzx
xy3
001.0xz001.0
z
v
y
wyz
AE
AE'AE)( EAE
22
22222
EAE21
21)0997.1()0001.1()5.1503.1()(
P
u
x
x Se generan simultáneamente
x
MATERIAL P P
P de baja intensidad
MATERIAL FRÁGIL: Falla súbitamente
cuando es cargado en tracción con muy poca advertencia si es cargada en compresión (rocas, vidrios, c° común, yeso, etc.)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
96
MATERIAL DÚCTIL: Permite deformaciones unitarias considerables antes de fallar
(aceros, bronce, aluminio, ..., etc) CONCRETO ARMADO material semi - dúctil .
ACERO material convencional más usado (junto al concreto) en estructuras de Ingeniería Civil.
Propiedades esencialmente iguales en tracción y en compresión.
Elevada RIGIDEZ (resistencia a la deformación)
Alta DUCTILIDAD (absorbe grandes deformaciones antes de fallar).
Adecuado tiempo de servicio, si es protegido contra la corrosión y las
grandes temperaturas.
1.11.2) Ensayo Uniaxial de Tracción. Diagrama - .
Las principales propiedades mecánicas del acero, y en general las de todo material, que interesan en Mecánica de Sólidos, suelen determinarse experimentalmente en Laboratorios, mediante ensayos estandarizados. Un ensayo muy importante es el Ensayo o Prueba de Tracción Uniaxial. Usualmente, las probetas del material, se ensayan en máquinas mecánicas, hidráulicas o electrohidráulicas, que permiten la aplicación gradual de dos fuerzas iguales y opuestas dirigidas a lo largo del eje geométrico longitudinal de la probeta. La carga axial que se aplica produce alargamientos en una longitud de referencia. Equivalentemente, los esfuerzos normales que son inducidos generan deformaciones unitarias axiales en la probeta ensayada.
La aplicación gradual (por incrementos) de la carga axial, es necesaria para no generar EFECTOS DINÁMICOS (aceleraciones o vibraciones) en el material que se está ensayando (Aplicación Estática de la Carga Axial). Durante el ensayo se registran valores de la carga y del alargamiento producido (o se registran valores del esfuerzo normal y de la deformación unitaria correspondiente).
La carga comienza desde un valor 0 y se va incrementando, a velocidad especificada, hasta ocasionar la ruptura (falla) de la probeta.
Garganta zona de grandes
deformaciones unitarias y brusca reducción de la sección transversal (disipación de energía - calor).
P P
L0
A0
Probeta inicial
Dispositivos que permiten aplicar gradualmente la carga axial
P1
Se registran P1; 1 Se registran (o calculan)
0
11
A
P y
0
11
L
L0 + 1 P1
Pu Pu
garganta (estricción)
0 P Pu

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
97
Nota) Es usual referir los ESFUERZOS NORMALES inducidos al (A0) Área Transversal Inicial de la Probeta. Las DEFORMACIONES UNITARIAS se refieren a La Longitud Inicial (L0). (Esfuerzos y Deformaciones de Ingeniería).
Los resultados de varias observaciones durante el ensayo se grafican en un diagrama CARGA – ALARGAMIENTO (o en un DIAGRAMA ESFUERZO NORMAL – DEFORMACIÓN UNITARIA).
Las gráficas obtenidas describen el comportamiento del material ante cargas de Tracción Uniaxial. Para el acero estructural, una CURVA TÍPICA, presenta las características siguientes:
Parte Inicial (0 – a) Los esfuerzos son proporcionales a las deformaciones
unitarias. El punto "a", no es fácil de precisar.
Parte a – a' Zona de INCERTIDUMBRE, por el cambio de un RÉGIMEN LINEAL a un RÉGIMEN NO LINEAL.
Parte a' – b Zona Plana o Escalón de Fluencia. Ocupa una posición sensiblemente horizontal. Indica que las deformaciones unitarias se incrementan rápidamente, sin que varíe notoriamente el correspondiente valor del esfuerzo normal.
En la zona de endurecimiento (b – c) se hace necesario incrementar el esfuerzo para
lograr aumentar las deformaciones unitarias, hasta un punto donde se alcanza el máx. Posteriormente, la probeta se deforma rápidamente y el esfuerzo decrece. En el punto r se produce la ruptura de la probeta.
P1
1
P
rotura
Diagrama P-
0
11
L
0
11
A
P
1
1
rotura
Diagrama -
cambio de escalas
( )
rotura
0
a
a'
b
c
r
Parte Inicial (Pendiente muy fuerte)
Zona de incertidumbre
Escalón de fluencia
Zona de endurecimiento
Zona final
acero
0A
P
0L

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
98
Notas) En la parte inicial del diagrama los Esfuerzos Normales son proporcionales con las
Deformaciones Unitarias (Ley de Hooke). Los esfuerzos normales están referidos al área transversal inicial de la Probeta
(A0). Las deformaciones unitarias están referidas a la longitud inicial de referencia (L0).
Cada material tiene un Diagrama - característico. Para diferentes tipos de un material, existen variaciones en los diagramas característicos.
En la mayoría de materiales tradicionales usados en Ingeniería Civil, el escalón de
fluencia NO tiene inicio en un punto perfectamente definido.
Fundamentalmente, el Diagrama - presenta DOS ZONAS diferenciadas.
ZONA ELÁSTICA Caracterizada por deformaciones unitarias reversibles
(recuperables).
(, máx)
y
p
p y
Límite de proporcionalidad
inicio de la fluencia
límite de elasticidad
(r, r)
Generalmente: p y
p y
fluencia de Unitaria nDeformació
fluencia de Esfuerzo
klb/pulg 36
klb/pulg 58
les)referencia valores(
lEstructura Acero
y
y
2y
2máx
5.5
MADERA (Pino)
CONCRETO SIMPLE
4.8
0.02 0.03
(klb/pulg2)
( )
Alta resistencia
(ACERO)
( )
Resistencia intermedia
Baja resistencia
ZONA ELÁSTICA LINEAL
ZONA ELÁSTICA
ZONA INELÁSTICA
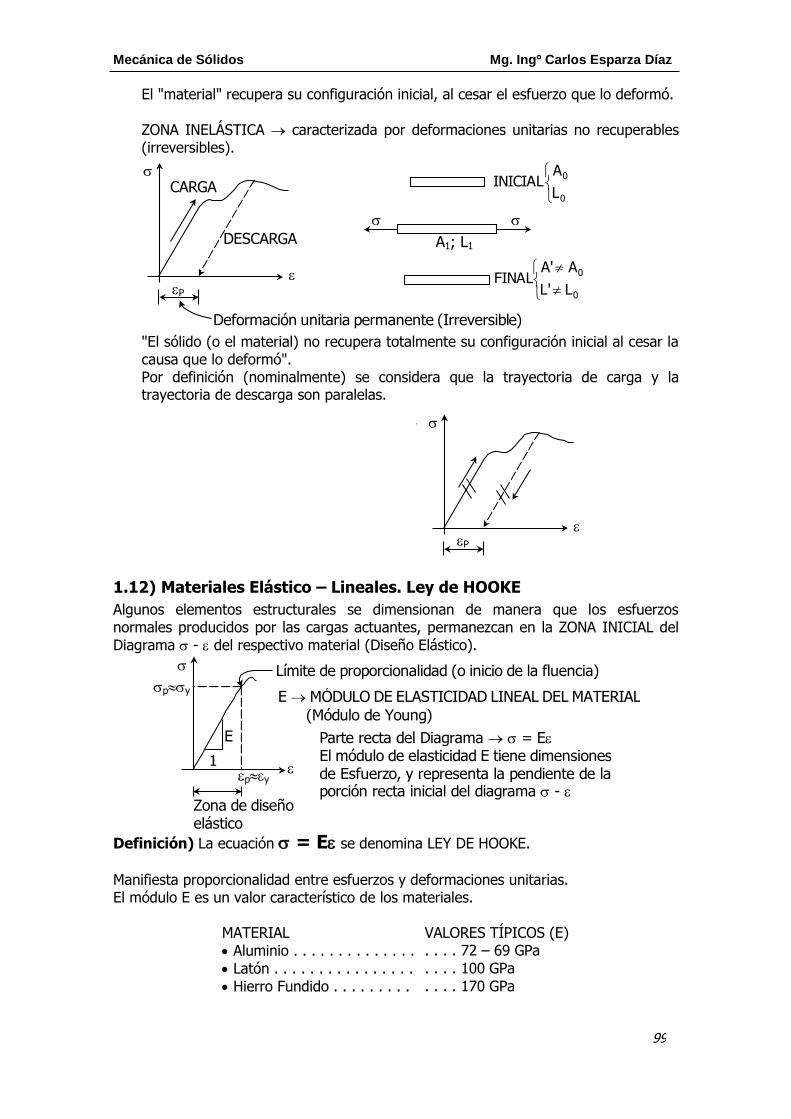
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
99
El "material" recupera su configuración inicial, al cesar el esfuerzo que lo deformó.
ZONA INELÁSTICA caracterizada por deformaciones unitarias no recuperables (irreversibles).
"El sólido (o el material) no recupera totalmente su configuración inicial al cesar la
causa que lo deformó". Por definición (nominalmente) se considera que la trayectoria de carga y la trayectoria de descarga son paralelas.
1.12) Materiales Elástico – Lineales. Ley de HOOKE
Algunos elementos estructurales se dimensionan de manera que los esfuerzos normales producidos por las cargas actuantes, permanezcan en la ZONA INICIAL del
Diagrama - del respectivo material (Diseño Elástico).
Definición) La ecuación = E se denomina LEY DE HOOKE.
Manifiesta proporcionalidad entre esfuerzos y deformaciones unitarias. El módulo E es un valor característico de los materiales.
MATERIAL VALORES TÍPICOS (E)
Aluminio . . . . . . . . . . . . . . . . . . 72 – 69 GPa
Latón . . . . . . . . . . . . . . . . . . . . 100 GPa
Hierro Fundido . . . . . . . . . . . . . 170 GPa
CARGA
DESCARGA
A1; L1
0
0
L
AINICIAL
0
0
L'L
A'AFINAL
P
Deformación unitaria permanente (Irreversible)
P
REALIZAR ENSAYOS EN EL LABORATORIO (Coordinar)
Límite de proporcionalidad (o inicio de la fluencia)
E
1 py
py
Zona de diseño elástico
E MÓDULO DE ELASTICIDAD LINEAL DEL MATERIAL
(Módulo de Young)
Parte recta del Diagrama = E El módulo de elasticidad E tiene dimensiones de Esfuerzo, y representa la pendiente de la porción recta inicial del diagrama -

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
100
MATERIAL VALORES TÍPICOS (E)
Concreto (Simple) . . . . . . . . . . . 21 GPa
Acero Estructural . . . . . . . . . . . 205 GPa
Madera (Pino) . . . . . . . . . . . . . . 12 GPa
Notas) Cuanto se alargaría la barra si aplicásemos un esfuerzo normal cuyo valor sea el mismo que el valor del módulo de elasticidad lineal.
Físicamente, el módulo lineal de elasticidad representaría un valor del Esfuerzo
Normal necesario para producir en el elemento una deformación unitaria igual a la unidad (o duplicar su longitud inicial).
ii) Es posible escribir La Ley de Hooke en función de otros parámetros.
Definición) El factor se denomina RIGIDEZ AXIAL DE LA BARRA.
K = (combinación de geometría + material)
P = K(L) Físicamente, el Coeficiente de Rigidez Axial K, representa un valor de la fuerza axial
P necesario para producir un Alargamiento Unitario. (Si L = 1 P = K).
El factor RECÍPROCO de denomina FLEXIBILIDAD AXIAL DE LA BARRA.
A0; L0
INICIAL
MATERIAL ELÁSTICO-LINEAL
i)
=E =E
L=?
=E =E
L=2L0
Ley de Hooke: = E Luego: E = E 1 =
Pero
0L
L
0L
L1
L = L0
L; A; E
L + L
P P
= E. Luego:
L
LE
A
P de donde obtenemos
EA
PLL (Fórmula del alargamiento
elástico lineal)
L
EA
LL
EAP
P
L 1
L
EA
L
EA
K
1

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
101
iii) La constante K también suele denominarse CONSTANTE DE RESORTE
EQUIVALENTE:
K tiene unidades de Fuerza / Unidades de Longitud [K] = [F]/[L] Una barra de material elástico lineal se comporta básicamente como un RESORTE
LINEAL ELÁSTICO De modo similar al resorte, la barra almacenará ENERGÍA.
iv) La fórmula del Alargamiento Elástico puede usarse para el caso se sólidos
(de material elástico lineal) con secciones transversales variables y/o con carga axial variable.
El alargamiento del elemento diferencial, es:
En consecuencia, el alargamiento total del sólido se evaluará mediante una integral
definida:
ó alternativamente
Por La Ley de Hooke (x) = E(x), luego
Expresión coincidente con la deducida por razonamientos geométricos (ver sección 1.9.2).
Nota) El producto EA se denomina RIGIDEZ DE LA SECCIÓN. EJEMPLOS
P K
P = k
EA
PLL
P(x)
A = A(x)
x
L
x
P(x)
dx
(Función de área: ACOTADA)
L = ?
(Carga axial)
dx)x(EA
)x(P)dx(
L
dx)x(EA
)x(PL
Ldx
E
)x(L
L
dx)x(L
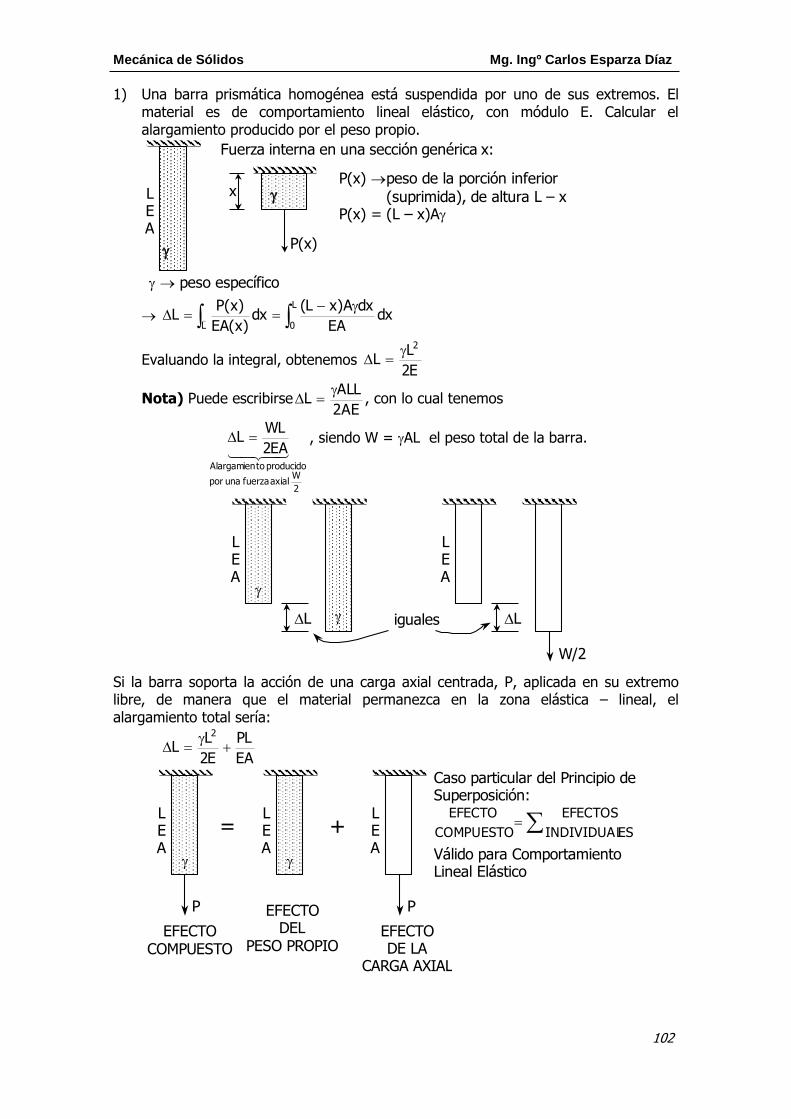
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
102
1) Una barra prismática homogénea está suspendida por uno de sus extremos. El material es de comportamiento lineal elástico, con módulo E. Calcular el alargamiento producido por el peso propio.
Evaluando la integral, obtenemos
Nota) Puede escribirse , con lo cual tenemos
, siendo W = AL el peso total de la barra.
Si la barra soporta la acción de una carga axial centrada, P, aplicada en su extremo libre, de manera que el material permanezca en la zona elástica – lineal, el alargamiento total sería:
L E A
x
P(x)
P(x) peso de la porción inferior
(suprimida), de altura L – x P(x) = (L – x)A
Fuerza interna en una sección genérica x:
peso específico
L
0Ldx
EA
dxA)xL(dx
)x(EA
)x(PL
E2
LL
2
AE2
ALLL
2
W axial fuerza unapor
producido toAlargamien
EA2
WLL
L E A
L E A
L L
W/2
iguales
EA
PL
E2
LL
2
= + L E A
P
EFECTO COMPUESTO
L E A
EFECTO DEL
PESO PROPIO
L E A
P
EFECTO DE LA
CARGA AXIAL
Caso particular del Principio de Superposición:
ESINDIVIDUAL
EFECTOS
COMPUESTO
EFECTO
Válido para Comportamiento Lineal Elástico

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
103
2) Calcular el desplazamiento del punto C en el sistema representado. Las barras deformables son de material lineal elástico, con módulo E = 2×104 kN/cm2.
FUERZAS AXIALES EN (1) Y (2):
Reemplazando valores numéricos, tenemos:
cm ; cm
Reemplazando en (*) C = 0.09 + 0.3 = 0.39 cm Nota) Observar la magnitud de los alargamientos: Resultan ser despreciables comparados con las longitudes iniciales de las barras. Resultados que están de acuerdo con la hipótesis de Deformaciones Infinitesimales.
3) En el sistema representado, determinar la RIGIDEZ en el punto B. Las barras
deformables son de material lineal elástico, cuyo módulo de Young es E1.
4a 4a a
P=6 kN
P=6 kN
F G D
B C
A
1)
2) Barras rígidas
21
1
cm 2A
m 6L 1) Barra
22
2
cm 2A
m 4L 2) Barra
(Fuerzas kN; Long cm)
El desplazamiento del punto C debe ser igual a la suma de los cambios de longitud de las barras deformables (1) y (2)
C = 1 + 2 . . . . (*)
6 kN
F G D
B A
6 kN
C
F1
F2
F2
RF
RB
Por equilibrio: F1 = 6 kN; F2 = 30 kN (ambas barras en tracción)
ALARGAMIENTOS DE LAS BARRAS (1) Y (2):
1
1EA
PL
;
2
2EA
PL
2
41 109)2)(10)(2(
)600)(6( 1
42 103)2)(10)(2(
)400)(30(
a 2a
B 2L1 E1 A1
L1 E1 A1 1)
(2
P Barra rígida
(1) y (2) barras
deformables
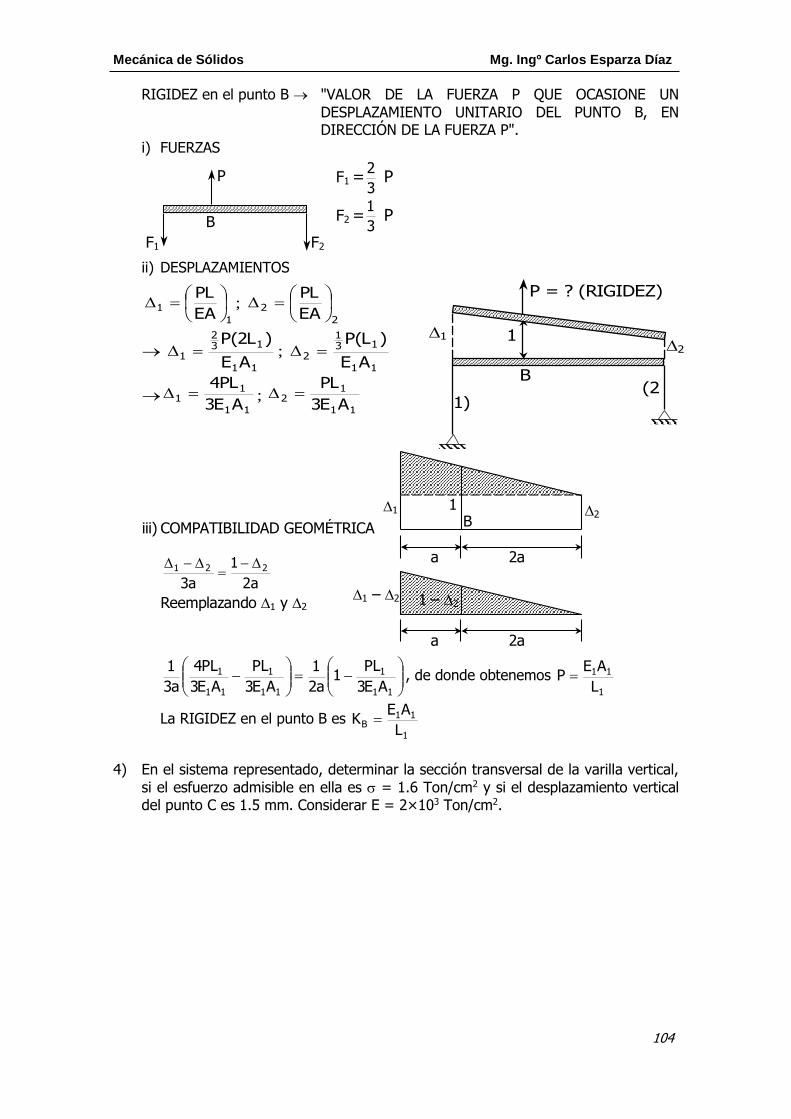
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
104
RIGIDEZ en el punto B "VALOR DE LA FUERZA P QUE OCASIONE UN
DESPLAZAMIENTO UNITARIO DEL PUNTO B, EN DIRECCIÓN DE LA FUERZA P".
i) FUERZAS
ii) DESPLAZAMIENTOS
, de donde obtenemos
La RIGIDEZ en el punto B es
4) En el sistema representado, determinar la sección transversal de la varilla vertical,
si el esfuerzo admisible en ella es = 1.6 Ton/cm2 y si el desplazamiento vertical del punto C es 1.5 mm. Considerar E = 2×103 Ton/cm2.
B
P
F1 F2
F1 = 3
2P
F2 = 3
1P
B
1) (2
P = ? (RIGIDEZ)
2 1 1
1
1EA
PL
;
2
2EA
PL
11
132
1AE
)L2(P ;
11
131
2AE
)L(P
11
11
AE3
PL4 ;
11
12
AE3
PL
iii) COMPATIBILIDAD GEOMÉTRICA
a2
1
a3221
Reemplazando 1 y 2
2 1
a 2a
1 B
1 – 2
a 2a
1 – 2
11
1
11
1
11
1
AE3
PL1
a2
1
AE3
PL
AE3
PL4
a3
1
1
11
L
AEP
1
11B
L
AEK

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
105
i) FUERZA EN LA BARRA DEFORMABLE (Equilibrio)
5 cm2
de donde obtenemos A = . . . . (*)
iii) COMPATIBILIDAD (Geometría). (Semejanza de s)
.
Reemplazando en (*) A = = 5.33 cm2
De los dos valores calculados para área transversal A, seleccionamos el mayor A
= 5.33 cm2, puesto que cumple las dos condiciones: 1.6 Ton/cm2; =
1.5 cm.
5) Determinar el desplazamiento del punto de aplicación de la carga P en el sistema
representado. Considerar que todas las barras tienen la misma RIGIDEZ AXIAL EA (RIGIDEZ DE SECCIÓN).
w = 1.73 Ton/m
w
B
a
A 30°
P
C
barra rígida
a = 1 m a
P = 2 Ton
2Ton/cm 6.1
Ton 8A
w = 1.73 Ton/m
30°
2 Ton
RA
F
F = 8 Ton (tracción) El esfuerzo normal es:
A
F
FA
ii) DEFORMACIÓN (Materiales)
EA
FL
A)10)(2(
)100)(8(3
CV = 1.5
mm
F C
C'
4.0
200100
CV
cm 075.0
2
cm 15.0
2
CV
075.0
4.0
CV

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
106
Equilibrio: No existen fuerzas de Reacción. Las fuerzas en las barras se determinan por el método de los nudos.
Material: Calculamos los cambios de longitud de las 3 barras típicas:
(acortamiento)
(acortamiento)
(alargamiento)
Compatibilidad: (geometría) Las barras (1) y (3) se acortan la misma cantidad. La proyección horizontal de esos acortamientos (en valor absoluto) deberá ser igual al corrimiento del rodillo (a su vez, igual al alargamiento de la barra (2)).
P
P 3)
3) (1
(1
(2 45°
45°
a
a
45° 45° F1 F3
P
F1 = F3 = 2
P (compresión)
45°
45°
F3
F3
F2 F2 = P (tracción)
EA2
Pa
EA
a2
P
EA
FL
1
1
EA
Pa
EA
a2
P
EA
FL
3
3
EA
2Pa
EA
FL
2
2
H desplazamiento horizontal (total)
V desplazamiento vertical (total)
2 alargamiento de la barra (2)
H
V
1
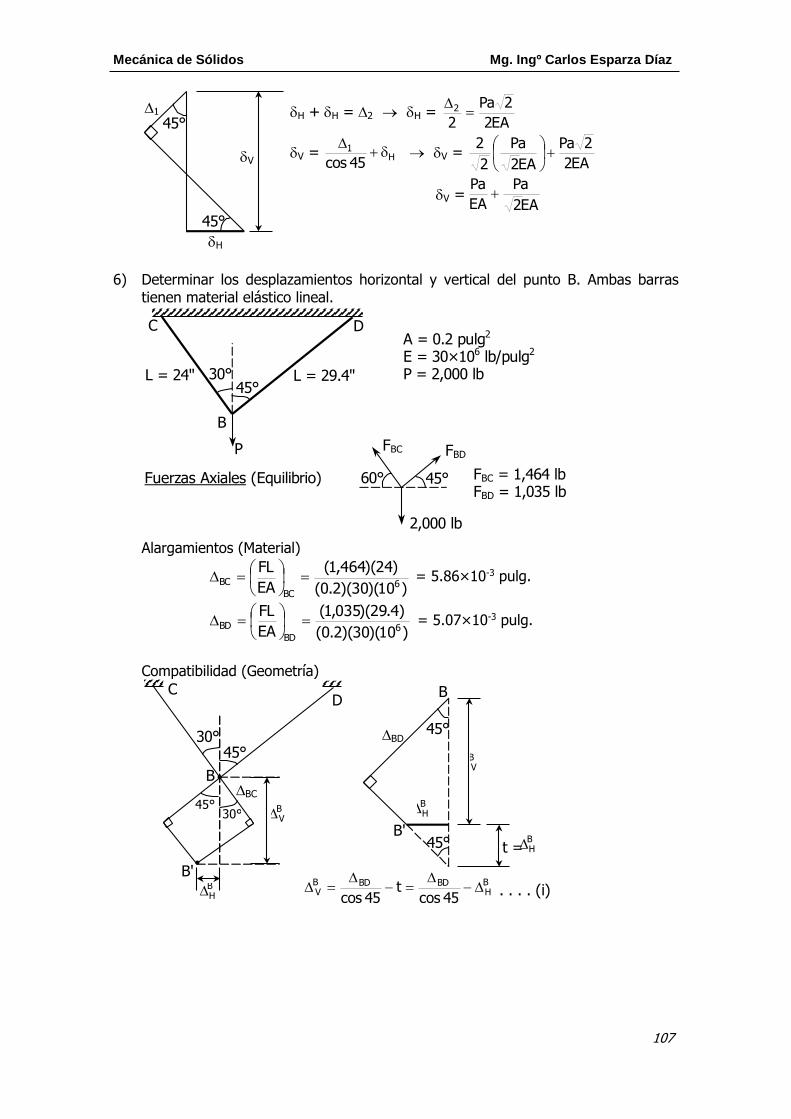
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
107
6) Determinar los desplazamientos horizontal y vertical del punto B. Ambas barras tienen material elástico lineal.
Alargamientos (Material)
= 5.86×10-3 pulg.
= 5.07×10-3 pulg.
Compatibilidad (Geometría)
45°
45°
H
V
1 H + H = 2 H = EA2
2Pa
22
V = H1
45cos
V =
EA2
2Pa
EA2
Pa
2
2
V = EA2
Pa
EA
Pa
30° 45°
L = 24" L = 29.4"
P
B
C D
45° 60°
2,000 lb
FBD FBC
A = 0.2 pulg2 E = 30×106 lb/pulg2 P = 2,000 lb
FBC = 1,464 lb FBD = 1,035 lb
Fuerzas Axiales (Equilibrio)
)10)(30)(2.0(
)24)(464,1(
EA
FL6
BC
BC
)10)(30)(2.0(
)4.29)(035,1(
EA
FL6
BD
BD
BH
30°
45°
B
30°
45° BC
B'
BV
C D
BH
BD
BV
45°
45°
B
B' t =
BH
BH
BDBDBV
45cost
45cos
. . . . (i)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
108
Reemplazando valores y despejando , obtenemos:
= 0.26×10-4 pulg.
Sustituyendo este valor en (i) ó (ii), obtenemos:
= 6.91×10-3 pulg.
PROBLEMAS 1) Determinar dónde debe ubicarse un bloque de 20 kg de masa, sobre la viga rígida
ACB, para que los puntos B y F se pongan en contacto. Suponer comportamiento elástico – lineal de la barra CD. (E = 200 GPa)
Semejanza:
C = 0.3 mm
La Fuerza Axial necesaria en la barra CD se calcula a partir de la Ley de Hooke
0.3×10-3 =
30°
30° B'
BH
BV
B
BC 30tan
30cosBH
BCBV
. . . . (ii)
De las ecuaciones (i) y (ii)
BH
BDBH
BC
45cos30tan
30cos
BH
BH
BV
L = 0.25 m d = 2 mm (diámetro)
A B C
D
F y
Barra rígida Rígido
1.5 mm
masa 20 kg
0.08 0.32
1.5 mm
C
supuesto el "contacto"
AC = 0.08 m CB = 0.32 m
08.04.0
5.1 C
CD
CEA
PL
234
9CD
)102(10200
)25.0(F
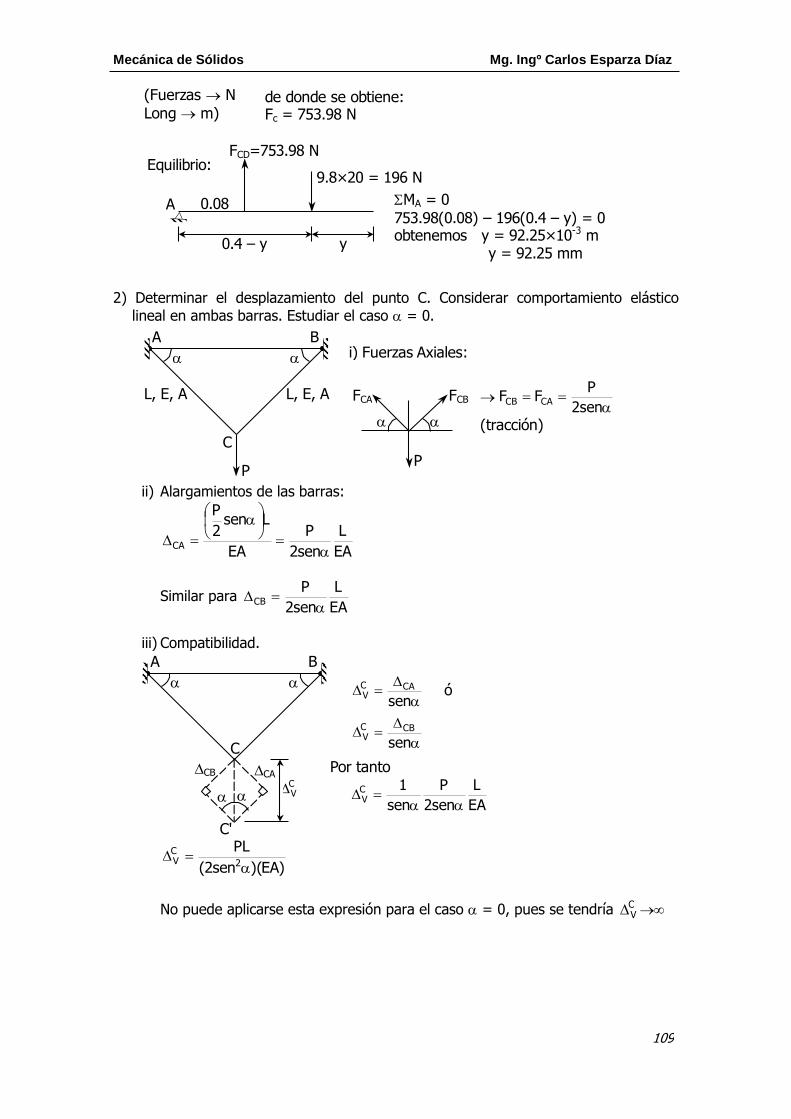
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
109
2) Determinar el desplazamiento del punto C. Considerar comportamiento elástico
lineal en ambas barras. Estudiar el caso = 0.
ii) Alargamientos de las barras:
Similar para
iii) Compatibilidad.
No puede aplicarse esta expresión para el caso = 0, pues se tendría
(Fuerzas N
Long m)
0.08
y 0.4 – y
A
FCD=753.98 N
9.8×20 = 196 N
de donde se obtiene: Fc = 753.98 N
MA = 0
753.98(0.08) – 196(0.4 – y) = 0 obtenemos y = 92.25×10-3 m y = 92.25 mm
Equilibrio:
L, E, A L, E, A
A B
C
P
P
FCB FCA
i) Fuerzas Axiales:
sen2
PFF CACB
(tracción)
EA
L
sen2
P
EA
Lsen2
P
CA
EA
L
sen2
PCB
A B
C
C'
CV
senCAC
V ó
senCBC
V
EA
L
sen2
P
sen
1CV
Por tanto CB CA
)EA)(sen2(
PL2
CV
CV

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
110
En configuración inicial no es posible hallar las fuerzas de la barra.
F1 = F2 =
Si 0, las fuerzas F1 y F2 crecen (resultado probado experimentalmente)
Aproximación: sen cuando 0
F1 = F2 . . . . (*)
Usamos la Ley de Hooke: 1 = E1 (ó 2 = E2)
Aproximación Binomial
; pero tan()= =
Con aproximación suficiente:
de donde:
Nota) En este caso, en que la deformación ALTERA el RÉGIMEN ESTÁTICO del
Sistema, el desplazamiento del nudo C (punto de aplicación de la carga) NO es PROPORCIONAL a la intensidad de la carga P, a pesar de que el material de las barras sigue la Ley de Hooke.
(CASO DE NO LINEALIDAD GEOMÉTRICA)
Resolvemos el problema con = 0 A B C
L E A L E A P
Equilibrio: FAC
P
FCB FAC = FCB
En configuración deformada: A B C
P
(1
2)
L L
C'
C
sen2
PCB
)(2
P
AC
AC'ACE
)(A2
P
1
L1E
L
LLE
)(A2
P2
C2C
2
1
L2
11E
)(A2
P2
2C
2
2C
LE
)(A
P
LC
LC
2
C
C LE
)L
(A
P
EA
PL33C 3
CEA
P L
)(GEOMETRÍA NDEFORMACIÓ POR
MATERIAL PORLINEALIDAD NO
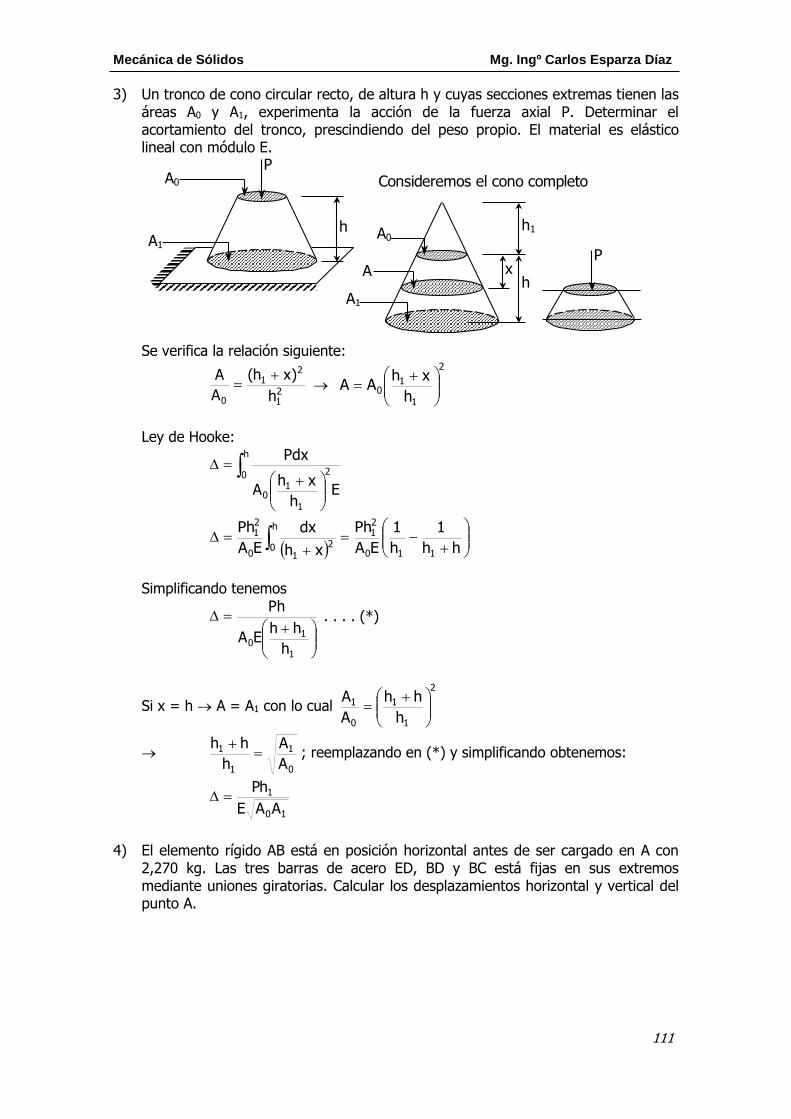
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
111
3) Un tronco de cono circular recto, de altura h y cuyas secciones extremas tienen las áreas A0 y A1, experimenta la acción de la fuerza axial P. Determinar el acortamiento del tronco, prescindiendo del peso propio. El material es elástico lineal con módulo E.
Se verifica la relación siguiente:
Ley de Hooke:
Simplificando tenemos
. . . . (*)
Si x = h A = A1 con lo cual
; reemplazando en (*) y simplificando obtenemos:
4) El elemento rígido AB está en posición horizontal antes de ser cargado en A con
2,270 kg. Las tres barras de acero ED, BD y BC está fijas en sus extremos mediante uniones giratorias. Calcular los desplazamientos horizontal y vertical del punto A.
P
h A1
A0
P
h A1
A0
A
h1
x
Consideremos el cono completo
21
21
0 h
)xh(
A
A
2
1
10
h
xhAA
h
0 2
1
10 E
h
xhA
Pdx
hh
1
h
1
EA
Ph
xh
dx
EA
Ph
110
21
h
0 210
21
1
10
h
hhEA
Ph
2
1
1
0
1
h
hh
A
A
0
1
1
1
A
A
h
hh
10
1
AAE
Ph

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
112
Fuerzas Axiales: F1 = 6,810 kg (compresión); F2 = 0; F3 = 4,540 kg (tracción) Cambios de longitud de las barras:
– 0.153 cm (acortamiento)
2 = 0
0.061 cm
de donde obtenemos:
= 2(3 + 1) + 1
= 2(0.061 + 0.153) + 0.153
= 0.581 cm
5) Un tablón de madera, muy rígido, de longitud 2L, descansa sobre dos resortes
análogos de constante K, tal como se representa. Los resortes tienen una longitud h cuando el tablón está sobre ellos. Un peso es colocado en el centro del tablón y se desplaza lentamente hacia uno de los extremos. Determinar la distancia que puede desplazarse, hasta el instante en que el tablón entra en contacto con el piso. (No incluir el peso propio del tablón).
(3 (2
A E
B
C D
1.83 m
1.83 m
1)
elemento rígido P = 2,270 kg
3.66 m
A1 = 3.87 cm2 A2 = 9.68 cm2 A3 = 6.45 cm2 E1 = E2 = E3 = 21×106 kg/cm2
)10)(1.2)(87.3(
)100)(83.1)(810,6(61
)10)(1.2)(45.6(
)183)(540,4(63
A B
A'
B'
3
3
3
45°
1
3 = AH Como el punto B se desplaza
horizontalmente 3 = 0.061 cm
(es un punto de la barra rígida), todos los puntos de la barra rígida, horizontalmente, se desplazarán igual cantidad. Luego
061.0AH cm
tan = 366
1AV
tan = 183
13
366
1AV
= 183
13
AV
A
A'
366 cm
AV – 1
3
3
1
(1 2) (3
3 3 + 1
183 cm
AV
AV
AV
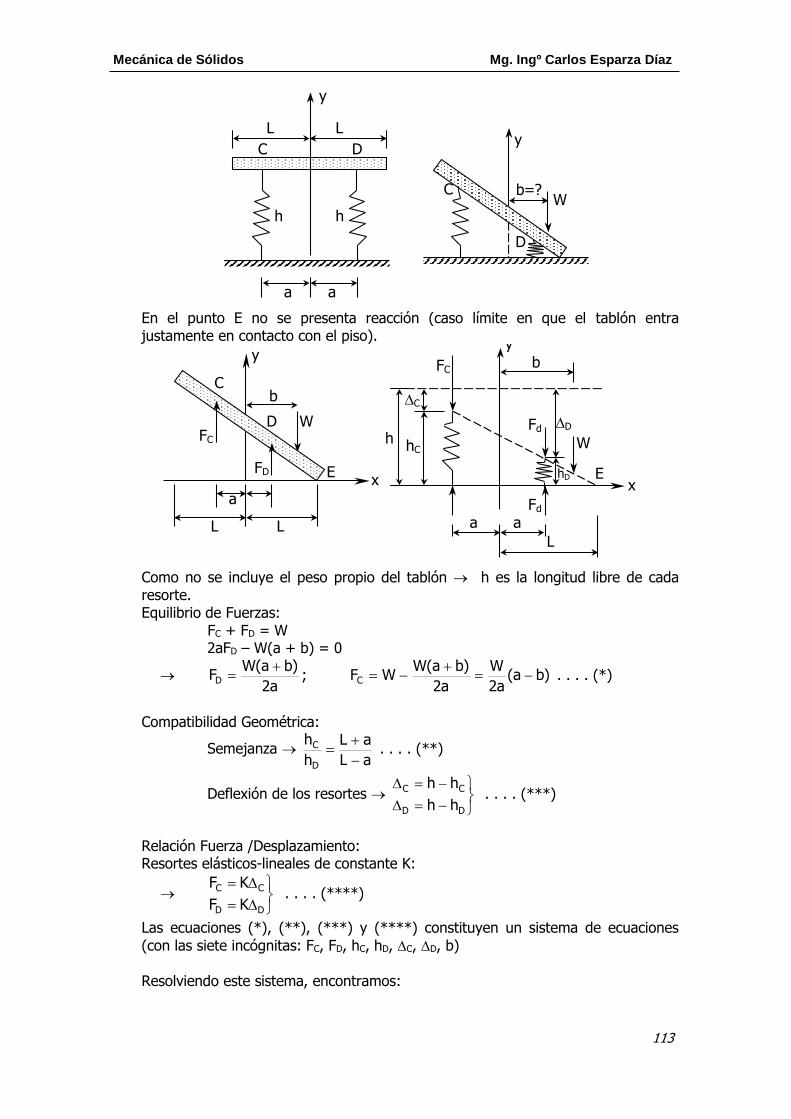
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
113
En el punto E no se presenta reacción (caso límite en que el tablón entra justamente en contacto con el piso).
Como no se incluye el peso propio del tablón h es la longitud libre de cada resorte. Equilibrio de Fuerzas:
FC + FD = W 2aFD – W(a + b) = 0
; . . . . (*)
Compatibilidad Geométrica:
Semejanza . . . . (**)
Deflexión de los resortes . . . . (***)
Relación Fuerza /Desplazamiento: Resortes elásticos-lineales de constante K:
. . . . (****)
Las ecuaciones (*), (**), (***) y (****) constituyen un sistema de ecuaciones
(con las siete incógnitas: FC, FD, hC, hD, C, D, b) Resolviendo este sistema, encontramos:
D
h h
C D
L L
y
a a
C W
b=?
y
D
C
W
b
y
L L
a
FC
FD E x
h
C
FC
a a
hC
L
y
b
Fd
Fd
D
hD
W
E x
a2
)ba(WFD
)ba(
a2
W
a2
)ba(WWFC
aL
aL
h
h
D
C
hh
hh
DD
CC
KF
KF
DD
CC
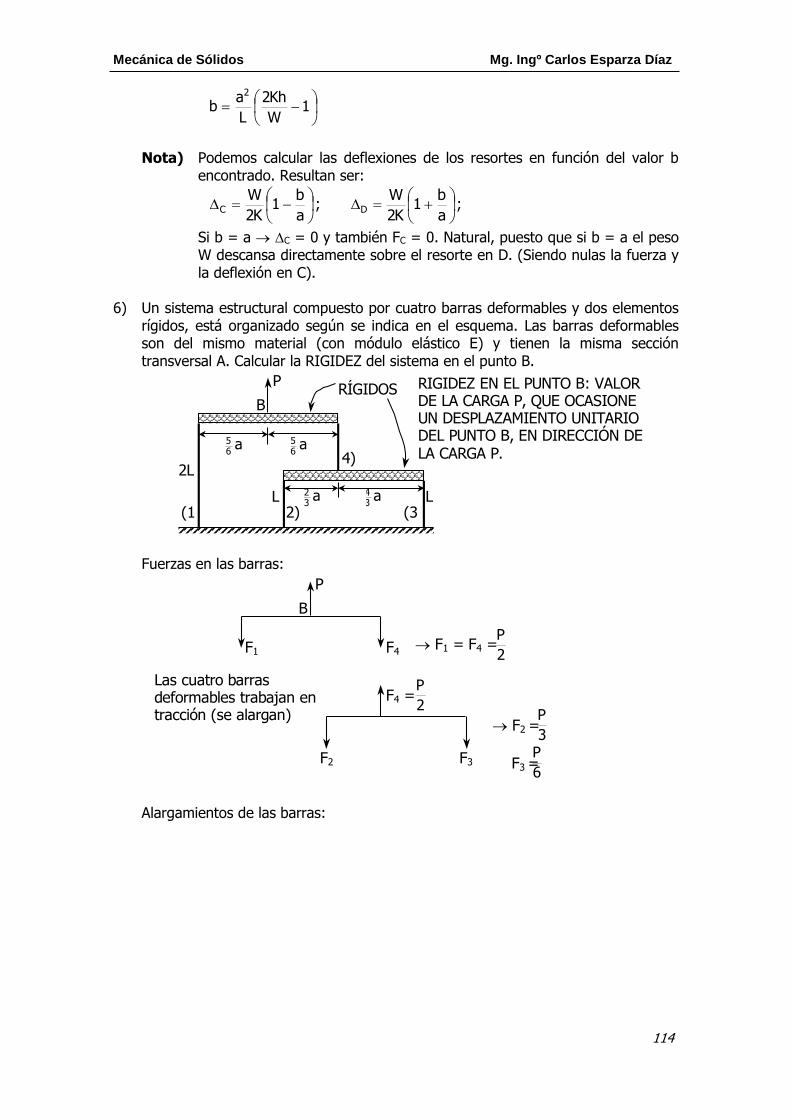
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
114
Nota) Podemos calcular las deflexiones de los resortes en función del valor b
encontrado. Resultan ser:
; ;
Si b = a C = 0 y también FC = 0. Natural, puesto que si b = a el peso W descansa directamente sobre el resorte en D. (Siendo nulas la fuerza y la deflexión en C).
6) Un sistema estructural compuesto por cuatro barras deformables y dos elementos
rígidos, está organizado según se indica en el esquema. Las barras deformables son del mismo material (con módulo elástico E) y tienen la misma sección transversal A. Calcular la RIGIDEZ del sistema en el punto B.
Fuerzas en las barras:
Alargamientos de las barras:
1
W
Kh2
L
ab
2
a
b1
K2
WC
a
b1
K2
WD
a34
a32
2) (3 (1
2L
L L
4) a
65 a
65
P
B
RIGIDEZ EN EL PUNTO B: VALOR DE LA CARGA P, QUE OCASIONE UN DESPLAZAMIENTO UNITARIO DEL PUNTO B, EN DIRECCIÓN DE LA CARGA P.
RÍGIDOS
Las cuatro barras deformables trabajan en tracción (se alargan)
P
B
F1 F4
F4 = 2
P
F2 F3
F1 = F4 = 2
P
F2 = 3
P
F3 = 6
P

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
115
Compatibilidad Geométrica:
Semejanza:
de donde: y reemplazando 2 y 3 de (*) obtenemos:
. . . . (**)
Semejanza:
de donde obtenemos: 1 + 4 + x = 2. Reemplazando de (*) y (**), tenemos:
(*)
EA2
PL
EA
)L(2
P
EA
PL
EA6
PL
EA
)L(6
P
EA
PL
EA3
PL
EA
)L(3
P
EA
PL
EA
PL
EA
)L2(2
P
EA
PL
4
4
3
3
2
2
1
1
a65 a
65
a34
a32
P
1 1 4 + x
x
B
2 (1
(2 (3
4)
3
a34 a
32
x 2
3 x – 3 2 – 3
a34 a
32
a
)x(
a234
332
)2(3
1x 32
EA18
PL5x
1 – 4 – x
a65
1 – 4 – x
a65
B"
a
x1
a
x
65
4
610
41

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
116
Despejando el valor de la carga P:
RIGIDEZ DEL SISTEMA EN EL PUNTO B:
7) Un anillo circular de radio interior r, radio exterior R y longitud L, se somete a una
presión interior uniforme radial p, según se indica en el esquema. Hallar el
incremento del radio del anillo (r) y el esfuerzo que se produce. Considerar E el módulo elástico.
La fuerza (normal) elemental sobre el elemento indicado, es:
dF = (pr)L d
Por la simetría del sistema, las componentes horizontales de las fuerzas dF se equilibran. Quedan solamente las componentes verticales.
Fvert = 0
F0 = pLr
El esfuerzo normal en el espesor del anillo, es:
El radio r sufre un incremento r:
Donde: (Deformación radial unitaria)
l: circunferencia interior (inicial)
Despejando r, encontramos
8) Un bloque rígido que pesa 100,000 lb se mantiene en la posición indicada
mediante las barras articuladas AB y CD. Las barras tienen igual diámetro y su
2EA18
PL5
EA2
PL
EA
PL
L8
EA9P
L8
EA9KB
r
R
p
L
d
F0 F0
0
0 d sen prLF2
prL2F2 0
rR
pr
L)rR(
pLr
A
F0
lr2)rr(2 r
interiornciacircunfere la en Cambio
)rR(E
pr
Er
r2)rR(E
prr2)rr(2
)rR(E
prr
2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
117
material tiene E = 18×106 lb/pulg2. Si la rotación máxima que se permite al bloque es 0.05° y se usa un factor de seguridad igual a 2.5, ¿qué diámetro mínimo deben tener las barras si el esfuerzo de fluencia es 70,000 lb/pulg2?
Permitimos que el bloque gire = 0.05° y calcularemos un diámetro. Luego, verificamos si se excede o no el esfuerzo de fluencia. Equilibrio
Geometría
Combinando las ecuaciones (2) y (4) y las (3) y (5), tenemos
lb/pulg2 . . . . (6)
lb/pulg2 . . . . (7)
Reemplazando FAB y FCD de las ecuaciones (6) y (7) en la ecuación (1), tenemos: 8[(0.02094)106A] + 18[(0.0314)106A] = 500,000
de donde: A = 0.682 pulg2
El correspondiente diámetro es: d = 0.932 pulg Pueden calcularse ahora, las fuerzas FAB y FBC, a partir de las ecuaciones(6) y (7). Se obtiene: FAB = 14,280 lb FCD = 21,400 lb
6AB 1002094.0A
F
6CD 1003140.0A
F
Ad24
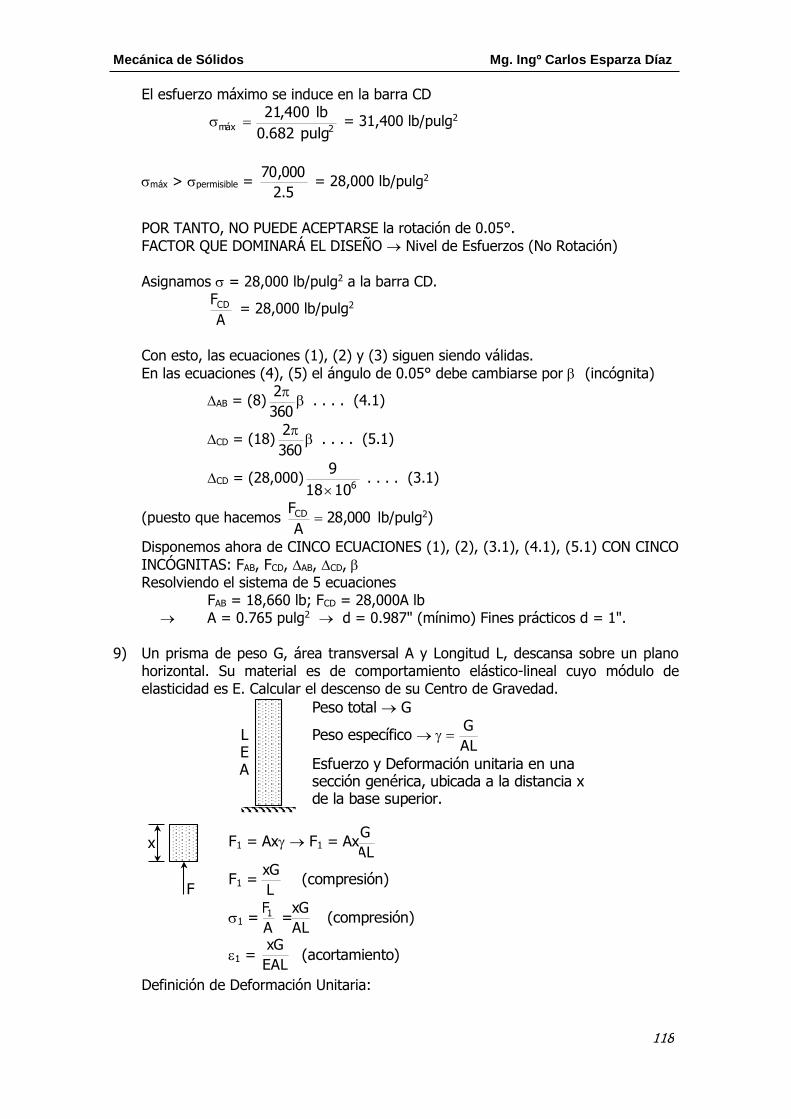
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
118
El esfuerzo máximo se induce en la barra CD
= 31,400 lb/pulg2
máx > permisible = = 28,000 lb/pulg2
POR TANTO, NO PUEDE ACEPTARSE la rotación de 0.05°.
FACTOR QUE DOMINARÁ EL DISEÑO Nivel de Esfuerzos (No Rotación)
Asignamos = 28,000 lb/pulg2 a la barra CD.
= 28,000 lb/pulg2
Con esto, las ecuaciones (1), (2) y (3) siguen siendo válidas.
En las ecuaciones (4), (5) el ángulo de 0.05° debe cambiarse por (incógnita)
AB = (8) . . . . (4.1)
CD = (18) . . . . (5.1)
CD = (28,000) . . . . (3.1)
(puesto que hacemos lb/pulg2)
Disponemos ahora de CINCO ECUACIONES (1), (2), (3.1), (4.1), (5.1) CON CINCO
INCÓGNITAS: FAB, FCD, AB, CD, Resolviendo el sistema de 5 ecuaciones
FAB = 18,660 lb; FCD = 28,000A lb A = 0.765 pulg2 d = 0.987" (mínimo) Fines prácticos d = 1".
9) Un prisma de peso G, área transversal A y Longitud L, descansa sobre un plano
horizontal. Su material es de comportamiento elástico-lineal cuyo módulo de elasticidad es E. Calcular el descenso de su Centro de Gravedad.
Definición de Deformación Unitaria:
2máxpulg 682.0
lb 400,21
5.2
000,70
A
FCD
360
2
360
2
61018
9
000,28A
FCD
L E A
Peso total G
Peso específico AL
G
Esfuerzo y Deformación unitaria en una sección genérica, ubicada a la distancia x de la base superior.
x
F
F1 = Ax F1 = AxAL
G
F1 = L
xG (compresión)
1 = A
F1 =AL
xG (compresión)
1 = EAL
xG (acortamiento)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
119
si dx es la longitud inicial, tendríamos
de donde (dx) = 1dx = (acortamiento)
Consideramos una "rebanada" diferencial en la distancia x.
. Evaluando la integral, tenemos:
Aplicamos un Teorema de Centros de Gravedad. Si ZG es la altura del centroide (respecto al suelo o plano de referencia), después del acortamiento, tendremos:
Pero dG0 peso de la rebanada diferencial.
dG0 = Adx
dG0 = A dx dG0 = dx
Por tanto:
El descenso del Centro de Gravedad, será
=
u
u
dx
)dx(1
dxEAL
xG
Después de la deformación, el espesor de la
"rebanada", es: dx – (dx) = dx – EAL
xGdx
dx – (dx) =
EAL
xG1 dx
Si Z es la distancia de la rebanada ya deformada al suelo, tenemos.
Z = (dx – (dx)), extendida para "todas"
las rebanadas que pueden definirse en el intervalo (x, L).
En consecuencia:
x
dx d(x)
z
L
xdx
EAL
xG1Z
2
x
2
L
EAL
G)xL(
2
x
EAL
GxZ
22L
x
2
L
00G dG Z)G)(Z(
AL
G
L
G
L
0
22G dx
L
G)xL(
EAL2
G)xL()G)(Z(
L
0
32
2
G )3
xxL(
EAL2
G
2
xLx
L
1Z
EA3
GL
2
LZG
GZ2
L
GZ2
L
EA3
GL

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
120
10) Una placa rígida, semicircular, de peso W = 500 N y radio r = 1 m está soportada en los puntos A, B y D por tres cables idénticos. El punto C está en el centro del arco circular ADB y el radio CD es perpendicular al diámetro AB. Cada cable tiene módulo de elasticidad E = 210 GPa, diámetro d = 2 mm y longitud L = 1.2 m. Una carga P = 3W actúa perpendicular a la placa, a la distancia x del punto C. Calcular la distancia x para que la placa tenga una pendiente de 0.1° (a lo largo de CD) bajo acción simultánea de W y P.
Fvert = 0 FA + FB + FD = P + W = 4W . . . . (i)
MCD = 0 FAr = FBr FA = FB (simetría) . . . . (ii)
MAB = 0 P x + W – FDr = 0 3Wx + 4 – FDr = 0 . . . . (iii)
De la ecuación (iii) obtenemos FD = 3 + . . . . (iv)
Reemplazando (ii) en (i) obtenemos 2FA + FD = 4W FA = . . . . (v)
Reemplazando (iv) en (v) obtenemos:
. . . . (vi)
Material (Alargamiento):
;
Equilibrio: (G centroide de la
superficie semicircular
x
P
A
B
C
3r4
x
P
A
B C
FB
FD
FA
D
W
D
3
r4
3
Wr
r
Wx
3
W4
2
FW4 D
3
W2
r2
Wx3W2FA
P W
D B
A
A D
0.1°
0.1°
r
D – A
tan 0.1° = r
AD
r tan0.1° = D – A . . . . (vii)
(Los alambres que pasan por A y por B se alargan la misma cantidad)
EA
LFDD
EA
LFAA

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
121
Reemplazando en (vii)
. Considerando (iv) y (vi), tenemos:
Simplificando:
Reemplazando valores:
Resolviendo esta ecuación, obtenemos x = 0.729 cm
)FF(EA
L1.0tanr AD
3
W2
r2
Wx3W2
3
W4
r
Wx3
EA
L1.0tanr
2
2
r2
x9
EA
WL1.0tanr
2
2x5.4
)102()10)(210(
)2.1)(500(1.0tan)1(
234
9

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
122
DEFORMACIÓN TOTAL
1.13) Comportamiento No Lineal. Diagramas Idealizados /
1.13.1) Definiciones:
SÓLIDO ELÁSTICO → Aquel que recupera su configuración inicial
cuando desaparecen las acciones que ocasionaron la deformación.
Elásticos Lineales
Pueden ser Elásticos No Lineales
Anelásticos
Lineal No Lineal Anelástico (Acero) (Cº Simple en compresión) (Caucho)
SÓLIDO INELÁSTICO → Aquel que no recupera su configuración inicial
cuando desaparecen las causas que lo deformaron.
En el sólido se inducen deformaciones irreversibles.
p
rp
Lazo de HISTÉRESIS (Disipación importante de energía, calor,…)
/
/
/
/
/
punto con 0
/
A( , )
tan
p r
PERMANENTE
r
r
p
(ELÁSTICA)
ERECUPERABL
permanente

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
123
DIFÍCIL DE DETERMINAR EXPERIMENTALMENTE
Nominal de Fluencia
En los materiales donde es imposible (difícil) precisar con exactitud el
valor del ESFUERZO DE FLUENCIA Y , es conveniente ubicarlo por
definición (nominal).
MÓDULOS SECANTE Y TANGENTE
En materiales cuyos diagramas constitutivos son no – lineales, pueden
definirse “MÓDULOS TANGENTE Y SECANTE”
ENERGÍA DE DEFORMACIÓN
Las fuerzas externas realizan trabajo durante la deformación. Esta
energía se almacena en el interior del sólido (Energía de Deformación).
)( PP
)(PUP
),( 11
),( 22
),( 00
/
Y
P
),( YY
/
)(
/
/
)(
),( 00
T
12
12
S
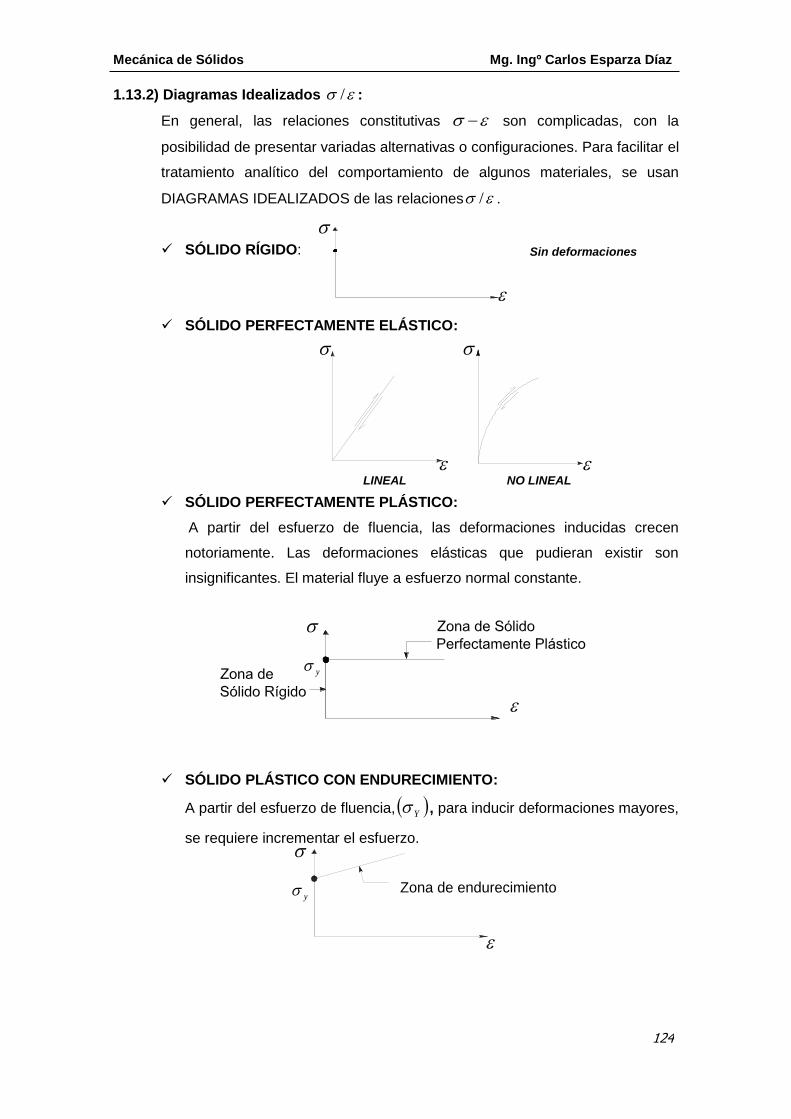
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
124
1.13.2) Diagramas Idealizados / :
En general, las relaciones constitutivas son complicadas, con la
posibilidad de presentar variadas alternativas o configuraciones. Para facilitar el
tratamiento analítico del comportamiento de algunos materiales, se usan
DIAGRAMAS IDEALIZADOS de las relaciones / .
SÓLIDO RÍGIDO:
SÓLIDO PERFECTAMENTE ELÁSTICO:
SÓLIDO PERFECTAMENTE PLÁSTICO:
A partir del esfuerzo de fluencia, las deformaciones inducidas crecen
notoriamente. Las deformaciones elásticas que pudieran existir son
insignificantes. El material fluye a esfuerzo normal constante.
SÓLIDO PLÁSTICO CON ENDURECIMIENTO:
A partir del esfuerzo de fluencia, Y , para inducir deformaciones mayores,
se requiere incrementar el esfuerzo.
/Sin deformaciones
/
/
LINEAL NO LINEAL
y
/
y Zona de endurecimiento
/

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
125
y
y
E1
Endurecimiento
/
SÓLIDO ELÁSTICO – PERFECTAMENTE PLÁSTICO
(ELASTOPLÁSTICO):
Las deformaciones elásticas NO pueden despreciarse. Tampoco existe
zona notable de endurecimiento.
SÓLIDO ELASTO – PLÁSTICO CON
ENDURECIMIENTO:
(Bilineal)
SÓLIDO DE RAMBERG – OSGOOD
La deformación total es: ....(*)rp
Para una gran mayoría de materiales la relación / (en la zona no
elástica) puede aproximarse por
p, donde Β y η son constantes
apropiadas para cada material.
Reemplazando en (*): ).....( OsgooddeRambergEcr
Si además, la deformación es elástica lineal →
r
.
.
;LinealElásticanDeformació
InelásticanDeformació
Las ecuaciones de Ramberg– Osgood han sido estudiadas experimentalmente.
10;2
72300
25;2
122400
pg
lb
pg
lb
Aluminio
lEstructuraAcero
y
/
y

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
126
NOTA› Las relaciones presentadas, suponen tácticamente que los materiales NO SON
VISCOSOS, es decir NO se presentan fenómenos importantes de desplazamientos
dependientes del tiempo (FLUJO).
Existen materiales (asfaltos, breas,…) que se deforman gradualmente por acción de
un esfuerzo y su deformación se incrementa con el tiempo aún cuando se haya
retirado al esfuerzo.
Comportamiento influido por la VISCOSIDAD.
MATERIAL ELÁSTICO
MATERIAL VISCOELÁSTICO
t
,
El modelo más simple de material viscoelástico, es el denominado SÓLIDO DE VOIGT
– KELVIN, cuya ecuación constitutiva, es:
d Viscosidade eCoeficient
YoungdeMódulo
t
De manera similar a la analogía existente entre un Sólido Elástico Lineal y un Resorte,
el Sólido de Voigt – Kelvin acepta analogía con el modelo físico:
Si el efecto de la Viscosidad es despreciable → 0 , y el modelo se reduce al
Modelo de Hooke.
Elasticidad Viscosidad
/
/
Sistema resorte/amortiguador en paralelo
E
/
/
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
127
Constante de Elasticidad
Constante de Viscosidad
Otro material viscoelástico, es el que admite la ecuación constitutiva:
MAXWELL modelo
Material un Define
ttA
El material modelo de MAXWELL es análogo al sistema resorte / amortiguador en
serie:
Las soluciones de la ec. Constitutiva tipo Maxwell, se dan en dos planos coordenados:
PROBLEMAS
1) ¿Qué esfuerzo se requiere, en cada caso, para generar deformaciones unitarias
de 0.001 y 0.004?
Elasticidad Viscosidad / /
/
t t
y
(i) (ii) (iii)
y
y
E1
E1
2pulg
Klb60y
2
4
pulg
Klb103Ε 2pulg
Klb2 310

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
128
CASO ( i ) → RÍGIDO PERFECTAMENTE PLÁSTICO
CASO ( ii ) → ELASTOPLÁSTICO
CASO ( iii ) → ELASTOPLÁSTICO CON ENDURECIMIENTO
0.001 0.004
1 2
y2pulg
Klb60 y 21
0.0024
1030
60
y
Deformación Unitaria de Fluencia:
Ey = 0.002E1 = 0.001 E2 = 0.004
2
y
2
1
4
1
lg/30
)001.0)(10)(3(
puklb
Ey = 0.002
y
E1
Ey = 0.002E1 = 0.001 E2 = 0.004
2
y
2
1
4
11
lg/30
)001.0)(10)(3(
puklb
2-y
E2 - Ey
y
y
2
2 tan
264klb/pulg
)3
100.002)(2)((0.00460
tan
tan
2
2
222
22
))
)
((
(
yyyy
yy
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
129
2) El cilindro representado, es de un material de comportamiento elástico no lineal,
cuyo diagrama / es parabólico. Hallar la deflexión del extremo libre
ocasionada por el peso propio.
3) Una barra de sección circular tiene 3m. de longitud y 10mm de diámetro, ésta
hecha de un material cuya ecuación constitutiva es:
9
2707
31
70000
donde se expresa en MPa. La barra está
cargada axialmente por fuerzas de tracción P = 20Kn, y después se retiran las
cargas.¿Cuál es la deformación unitaria permanente de la barra?
6"Φ
5"L
3pulg
lb0.2
2lgpu
lb510k10k10000kParábola 2
)1...(
510
parábola de 2do Grado
Vértice
)lgpu
lb10000;10(
2
2
P(x)(peso porción inferior)
Fuerza Axial
2)xL(
1010
2
unitaria ndeformació la obtenemos donde De
510)xL( (1) en doReemplazan
)xL(A
P(x)
Normal Esfuerzo)xL(A)x(P
.lgpu1088.2 datos los doreemplazan y integral la oResolviend
x)xL(10
x
será total deflexión La
7
60
0
2
10
2
L
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
130
Diagrama
4) El sistema estáticamente indeterminado que se representa en la figura consiste
en una barra rígida horizontal ABCD, soportada por dos resortes idénticos en los
puntos A y C. Los resortes admiten una relación fuerza – desplazamiento no
lineal, dada por ).pulgadas en libras; en F.(lgpu5.20;12.11
60F
La carga
P es de 35lb. y los segmentos de la barra tienen longitudes a=15”,b=10”,c=10”.
(a)Graficar un diagrama fuerza desplazamiento para uno de los resortes.
(b)Calcular las fuerzas FA Y FC en los resortes A y C respectivamente, los
cambios de longitud cA y de los resortes y el ángulo de giro de la barra
rígida.
PP
254.65MPa2
m2
)3
10(104
π
000N 20σ
:20KNP Para
total) ón(deformaci 0.00456ε
9
270
254.65
7
31
70000
254.65ε
:es total, ndeformació La
carg
a
E1
(total)
desc
arga
MPa)
perm remp
total
PERM
Total
9
270700007
3
70000
:dada vaconstituti ec. la con laComparándo
00364.0RECUP
recuptotal
recuppermtotal
0.00092permε
9
270
254.65
70000
254.65
7
3permε
mm68.13)3000)(00456.0( total
Δ : total toalargamien
mm92.10)3000)(00364.0(recup
Δ :erecuperabl toalargamien
mm76.2)3000)(00092.0(perm
Δ :permanente toalargamien
:NOTA
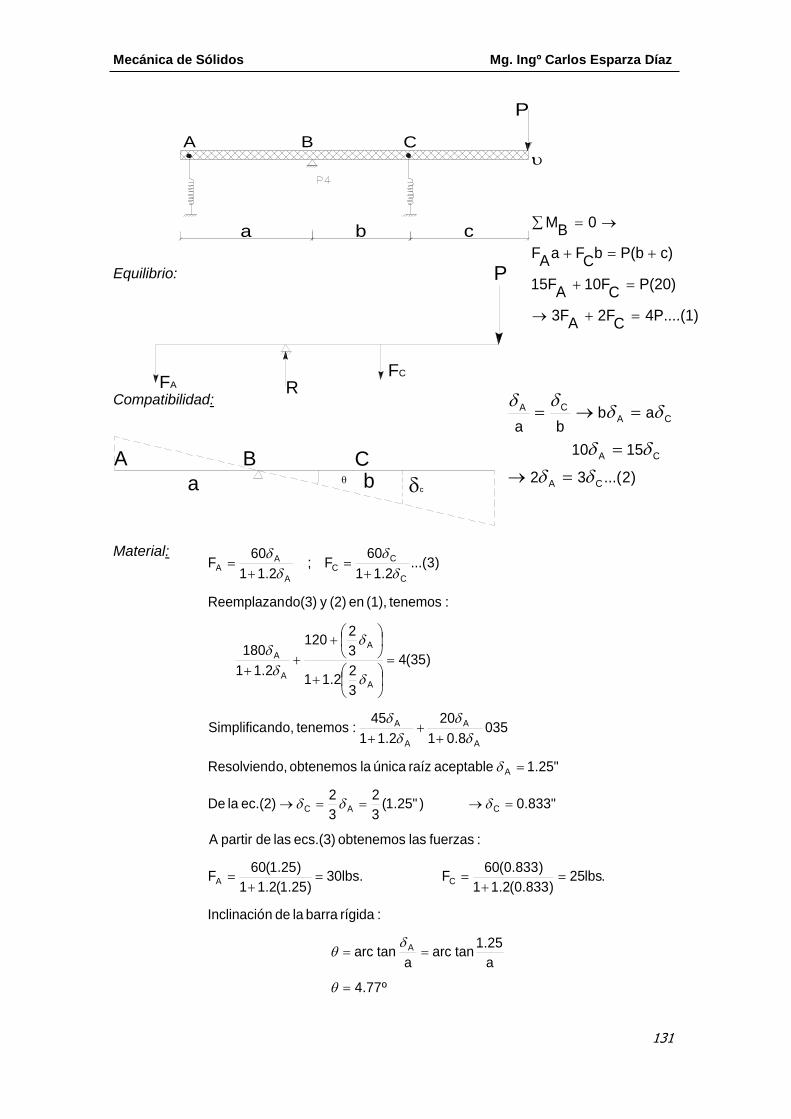
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
131
P
A B C
a b c
Equilibrio:
Compatibilidad:
Material:
P
RFA
FC
4P....(1)C
2FA
3F
P(20)C
10FA
15F
c)P(bbC
FaA
F
0B
M
c
A B C
a b )2...(32
1510
abba
CA
CA
CA
CA
º77.4
a
25.1tanarc
a tanarc
:rígida barra la de nInclinació
.lbs25)833.0(2.11
)833.0(60F 30lbs.
)25.1(2.11
)25.1(60F
:fuerzas las obtenemos ecs.(3) las de partirA
"833.0 )"25.1(3
2
3
2ec.(2) la De
"25.1 aceptable raíz única la obtenemos o,Resolviend
0358.01
20
2.11
45:tenemos o,ndSimplifica
)35(4
3
22.11
3
2120
2.11
180
:tenemos (1), en (2) y do(3)Reemplazan
)3...(2.11
60F ;
2.11
60F
A
CA
CAC
A
A
A
A
A
A
A
A
A
C
CC
A
AA

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
132
Diagrama Fuerza / Alargamiento
5) Una barra prismática AB de longitud L=86” y área transversal A = 0.75pulg2
soporta dos cargas concentradas: P1=24Klb y P2=6 Klb. El material es una
aleación cuyo diagrama / sigue una ecuación tipo Ramberg – Osgood.
)i.(..........10
380000.614
1
61010
en la que tiene unidades Klb/pulg2.
Determinar el desplazamiento del punto B, en las sgtes. condiciones: i) P1 actúa
sola; ii) P2 actúa sola;iii) P1 y P2 actúan simultáneas.
25
30
0.833 1.25pulg
Flb)
2.1.1
60F
.enunciando el en dada la es ecuación
la,10m;7/3;lgpu/Klb38000;lgpu/Klb1010 Para
tracción) de pruebas en asdeterminad(
material del Constantesm,,,
/ Diagrama del inicial parte la en Plástico Módulo :donde
ó
vaConstituti Ecuación : Osgood - Ramberg
260
26
00
m
0
0
m
000
P1
P2
L/2
L/2
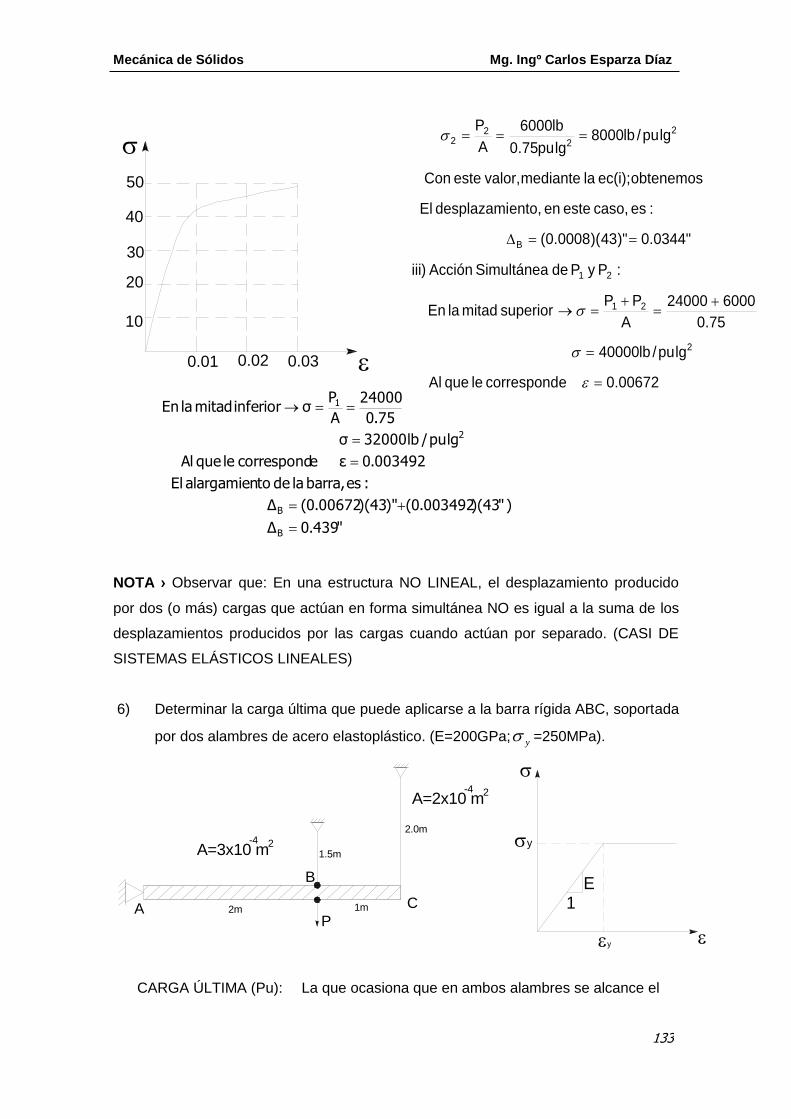
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
133
"439.0Δ
)"43)(003492.0()"43)(00672.0(Δ
:esbarra, la de toalargamien El
003492.0ε ecorrespond le que lA
lgpu/lb 32000σ
75.0
24000
A
Pσinferior mitad la En
B
B
2
1
NOTA › Observar que: En una estructura NO LINEAL, el desplazamiento producido
por dos (o más) cargas que actúan en forma simultánea NO es igual a la suma de los
desplazamientos producidos por las cargas cuando actúan por separado. (CASI DE
SISTEMAS ELÁSTICOS LINEALES)
6) Determinar la carga última que puede aplicarse a la barra rígida ABC, soportada
por dos alambres de acero elastoplástico. (E=200GPa; y =250MPa).
CARGA ÚLTIMA (Pu): La que ocasiona que en ambos alambres se alcance el
10
20
30
40
50
0.01 0.02 0.03
0.00672 ecorrespond le que Al
lgpu/lb40000
75.0
600024000
A
PPsuperior mitad la En
:P y P de Simultánea Acción)iii
"0344.0)"43)(0008.0(
:es caso, este en ento,desplazami El
obtenemosec(i); la mediantevalor, este Con
lgpu/lb8000lgpu75.0
lb6000
A
P
2
21
21
B
2
2
22
P
B
A C
1.5m
2.0m
1m2m
A=3x10 m2-4
A=2x10 m2-4
E1
y
y

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
134
Esfuerzo de Fluencia y . (Simultáneamente)
(Falla del Sistema)
Si sólo un alambre llega a la fluencia, NO se produce la falla del sistema, debido a
que el otro alambre aún estará en el rango elástico.
En el momento de la falla PB = y AB
Newtons 000150P
000Newtons 150 2
)50000(3)75000(2P
P3P2P20M
U
CBA
(↑___ INICIA LA FLUENCIA EN EL MATERIAL DE AMBOS ALAMBRES).
7) Dos cables son de un material elástico no lineal, cuya ecuación constitutiva es 2 k ,siendo k=1010lb/pulg2 y
2lb/pulg7103 .La sección
transversal de cada cable es 0.2pulg2 y ambos tienen 5 pies de longitud. Determinar la deflexión vertical del nudo B por aplicación de la carga P=2Klb.
Geometría:
Fuerzas:
P
PBPc
A
Newtons 50000P
)10)(210(250cP
AσP
Newtons 75000P
)10)(310(250P
AσP
C
46
CyC
B
46B
ByB
P
B
º
1 2
12
B
B
...(*)2
3ΔΔΔΔΔ
2
3ΔαcosΔΔ
total) (Simetría ΔΔ
B2
BB1
21
30º30º
F1 F2
P
3
PFF
FF
21
21

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
135
Esfuerzos:
Ecuación Constitutiva:
2
2
Lk
LA3
P
Régimen cualquier para,L
k
Según (*)
2
B2B2
3
L
1k
2
3
LA3
P
Reemplazando valores numéricos, tenemos:
2B2
10
B
7
4
3
)125(
10
2
3
125
103
)2.0(3
2000
(Fuerzas →lbs ; long → pulg.)
Resolviendo la ec. de 2do. grado, obtenemos: pulg 0143.0"
pulg 1935.0'
B
B
Nota > Las dos raíces son soluciones correctas.
Calculamos las deformaciones unitarias (en los cables).
Usamos (*) 2
3B
Para
.lgpu1676.0'
2
31935.0'" 1935.0'B
A3
P21
E = 0.003E = 0
Ek2
.0030
10
103
k
0
0)k(0
10
7
Para un valor admisible del esfuerzo existen dos Deformaciones Unitarias

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
136
Para
.lgpu01238.0"
2
30143.0"" 0143.0"B
Las deformaciones unitarias, son:
000206.060
01238.0
L
"" y 00279.0
60
1676.0
L
''
En el Diagrama Constitutivo:
E' = 0.00279
E = 0
E" = 0.000206
E = 0.003
Si P crece lgpu 0143.0B
Si P decrece lgpu 1935.0B
8) En el dispositivo esquematizado en la gráfica, se indican las dimensiones
correspondientes antes de que sean aplicadas las cargas.¿En qué sentido y que
distancia, en pulgadas, se moverá la placa fijada en el extremo derecho del
tubo, debido a la aplicación de las cargas?. Las curvas / para el acero y el
concreto se muestran en otra gráfica (1ton <>2000lbs.)
Si P es creciente Si P es decreciente
50 Ton
40 Ton
40 Ton
Concreto
(CILINDRO)
Placa de Apoyo
Placa de Extremo (CIRCULAR)
E=30 x10 lb/pulg1
6 2
y=35000 lb/pulg2
CONCRETO
(0.0015;2.120)lb/pulg2
Tubo de Acero: dext = 5.563 pulg. dint = 5.047 pulg.
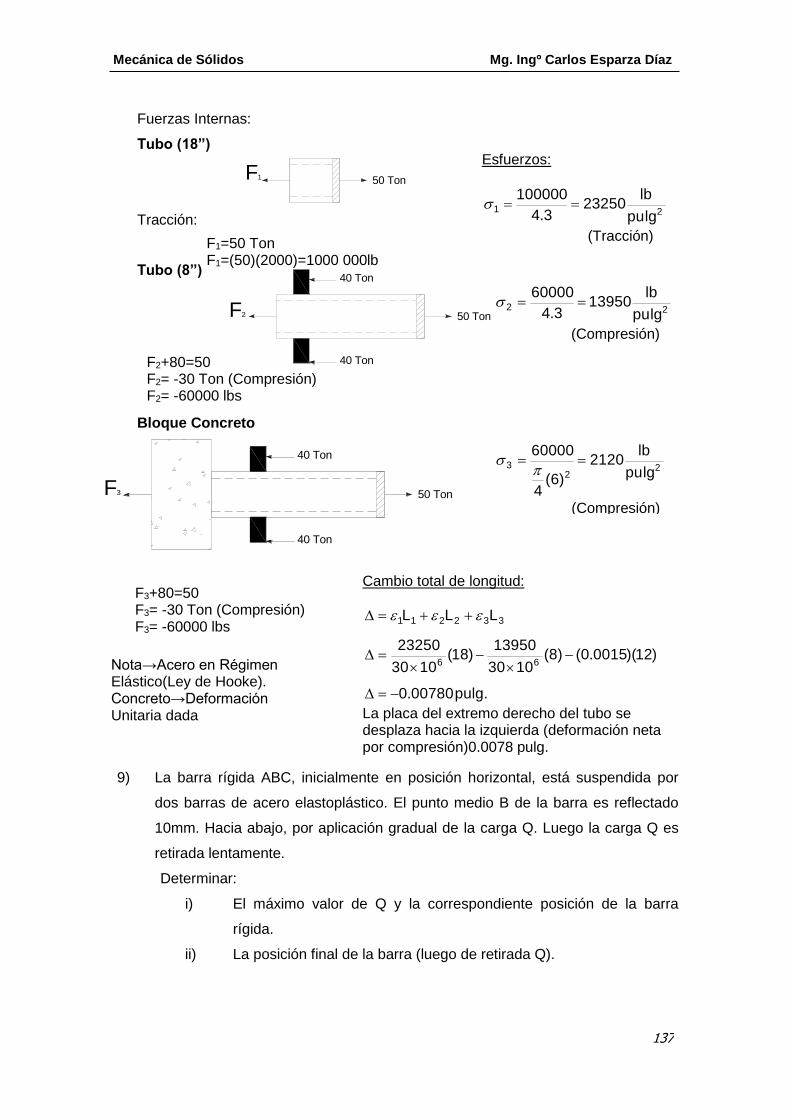
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
137
Fuerzas Internas:
Tubo (18”)
Tracción:
Tubo (8”)
Bloque Concreto
9) La barra rígida ABC, inicialmente en posición horizontal, está suspendida por
dos barras de acero elastoplástico. El punto medio B de la barra es reflectado
10mm. Hacia abajo, por aplicación gradual de la carga Q. Luego la carga Q es
retirada lentamente.
Determinar:
i) El máximo valor de Q y la correspondiente posición de la barra
rígida.
ii) La posición final de la barra (luego de retirada Q).
F1=50 Ton F1=(50)(2000)=1000 000lb
50 TonF1
50 Ton
40 Ton
40 Ton
F2
F2+80=50 F2= -30 Ton (Compresión) F2= -60000 lbs
Esfuerzos:
21lgpu
lb23250
3.4
100000
(Tracción)
22lgpu
lb13950
3.4
60000
(Compresión)
50 Ton
40 Ton
40 Ton
F3
F3+80=50 F3= -30 Ton (Compresión) F3= -60000 lbs
22
3lgpu
lb2120
)6(4
60000
(Compresión)
Cambio total de longitud:
pulg. 00780.0
)12)(0015.0()8(1030
13950)18(
1030
23250
LLL
66
332211
La placa del extremo derecho del tubo se desplaza hacia la izquierda (deformación neta por compresión)0.0078 pulg.
Nota→Acero en Régimen Elástico(Ley de Hooke). Concreto→Deformación Unitaria dada
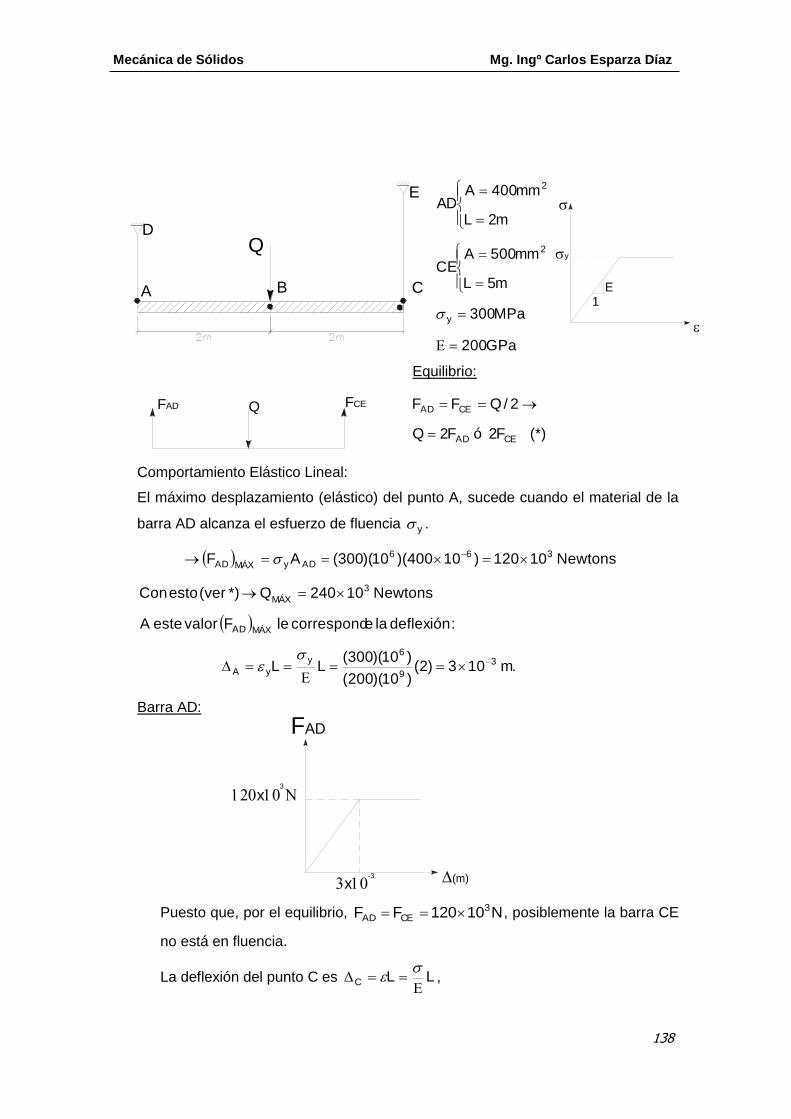
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
138
Equilibrio:
Comportamiento Elástico Lineal:
El máximo desplazamiento (elástico) del punto A, sucede cuando el material de la
barra AD alcanza el esfuerzo de fluencia y .
.m103)2()10)(200(
)10)(300(LL
:deflexión la ecorrespond le F valor esteA
Newtons10240Q *) (ver esto Con
Newtons10120)10400)(10)(300(AF
3
9
6y
yA
MÁXAD
3
MÁX
366ADyMÁXAD
Barra AD:
Puesto que, por el equilibrio, N10120FF 3CEAD , posiblemente la barra CE
no está en fluencia.
La deflexión del punto C es LLC
,
A B C
QD
E
E1
y
GPa200
MPa300
m5L
mm500ACE
m2L
mm400AAD
y
2
2
QFAD FCE
(*) F2 ó F2Q
2/QFF
CEAD
CEAD
x
(m)
3
FAD
x-3

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
139
es decir:
.m106
)5(10200
1
10500
10120
3C
L96
3
C
N10150)10)(500)(10)(300(AF 366yMÁXCE
Barra CE:
(Barra CE → no en fluencia).
La deflexión del punto B, es:
m3105.4)310(632
1
2
1 CAB
Puesto que B debe ser 10mm, deben presentarse deformaciones plásticas en las
barras deformables.
Comportamiento Plástico:
Para Q=240 x 103 N ocurren deformaciones plásticas en la barra AD.
Como la barra CE no ingresa al régimen plástico, la deflexión del punto C
permanece igual a 6mm.
Configuración de la barra rígida:
mm14' 102
6' A
A
x
3
F
x-3
FCEmáx=x3
mm mm mm
A B C
A B C
mmmm
xewtons3
A'

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
140
Posición Final luego de retirada (gradualmente) la carga Q
A C
POSICIÓN FINAL
SIN CARGA11mm
3mm
14mm
Deformación permanente en la barra AD
Deformación recuperable
Deformación recuperable
mm
10) La barra AB es de acero elastoplástico (E=200GPa; y =300MPa ).
Después de conectar la barra a la palanca rígida CD, se observa que el
extremo D está demasiado alto. Se aplica entonces una fuerza vertical Q en D
hasta que este extremo se desplaza al punto D’. Determinar la magnitud
requerida de la fuerza Q y la deflexión , si la palanca debe regresar a la
posición horizontal luego de retirada la carga.
E1
y
B
Q
D
C
D'
A
a
1
Palanca Rígida
L=1.25m
9mm
) ABbarra la de material(
GPa200
MPa300y

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
141
La máxima deformación unitaria recuperable, es:
.105.110200
10300 3
9
6y
y
Luego el alargamiento B’B”; es:
m10875.1"B'B
)105.1)(25.1(L"B'B
3
3yAB
La deflexión 1 se calcula por semejanza:
m1016.54.0
)1.1()10875.1(
CM
"B'B
'CB 331
1
Fuerza Máxima:
C
Fy...(*)
B
Qmáx
Carga de Fluencia en la barra AB: Fy=A y
es)resuperabl no plásticas nesdeformacio las enerafluencia(g de carga F (*)
Newtons. 940.06 6Q
1.1
)(0.4) 18.085 19(Q donde De
Q)1.1()4.0(F 0M
Newtons. 18.085 19)109(4
)10)(300(F
y
MÁX
MÁX
MÁXYC
236Y
11) Un cable sometido a tracción de radio r, tiene en su eje un módulo de elasticidad
E1, y este módulo crece linealmente hacia la periferia, donde alcanza el valor E2.
Determinar la Fuerza de tracción que puede soportar el cable con la debida
seguridad (el esfuerzo en ningún punto debe superar el valor 0 ).
B
D
C
D'
A
1
B'
B"
M
a
BB” → alargamiento total de la barra.
B’B” → alargamiento recuperable.
B’B → alargamiento permanente.
El material de la barra AB debe ingresar
al rango plástico.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
142
La fuerza axial es: AP
)A(
r
0
2P
El esfuerzo es variable:
r
121
La deformación es constante en todos los puntos.
2
10
2
21
2
02
2
0
2020
212
r
0
121
r
0
121
2σ3
πrP Homogéneo No Material (1)
2σ
r3
P
:)( en doReemplazan
σ
εσ ; periferie la En
)...(2r3
P
r2P
2r
P
E
E1
E2
dA=2d
Ley de Variación del Módulo Elástico: (1)
rb bra ; a
es , r
es , 0 Para ba
1221
2
1
Ley de Variación:
r
121
PP
Constante)(todas las fibras con la misma )

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
143
12) La varilla uniforme BC tiene sección transversal A y está hecha de un acero
elastoplástico (E, y ). Usando el sistema bloque / resorte representado, se
desea simular la deflexión del extremo C de la varilla cuando la carga axial es P
y luego se la retira. Designando por la masa del bloque;μ el coeficiente de
rozamiento entre el bloque la superficie horizontal, hallar: (i) Una expresión para
la masa m requerida. (ii)Una expresión para la constante del resorte K.
La deflexión en los puntos C y C’ debe ser la
misma para todos los valores de P.
Varilla BC:
Fuerza de Fluencia: Py=A y
Deformación de Fluencia: LLy
yy
Pendiente de la parte recta del
Diagrama P - y L
AE
L
AP
y
y
y
y
Sistema masa / resorte:
Si P<FMÁX el bloque no se mueve, y 'cP
Relación lineal con pendiente
Para el bloque comienza a
moverse y 'c se incrementa, sin ningún incremento en
P.
Si P decrece hasta cero, el bloque se mantiene en un
miso punto y 'c decrece linealmente:
→ Igualando las expresiones para Py y FMÁX:
→ Igualando las expresiones para Py y FMÁX:
bloque) del (masa g
AmmgA
y
y
→ Igualando las pendientes resorte) del (constante L
A
13) Un mástil rígido se sostiene en posición vertical por medio de dos cables de
material elástico no lineal, cuya ecuación constitutiva es ).MPa(ε10σ 25 El
mástil recibe una carga de viento q=1 KN/m uniformemente repartida sobre su
mgWFPMÁX
PCB
L
C' PB'm
K
c
P
Py
y
c'
P
FMÁX
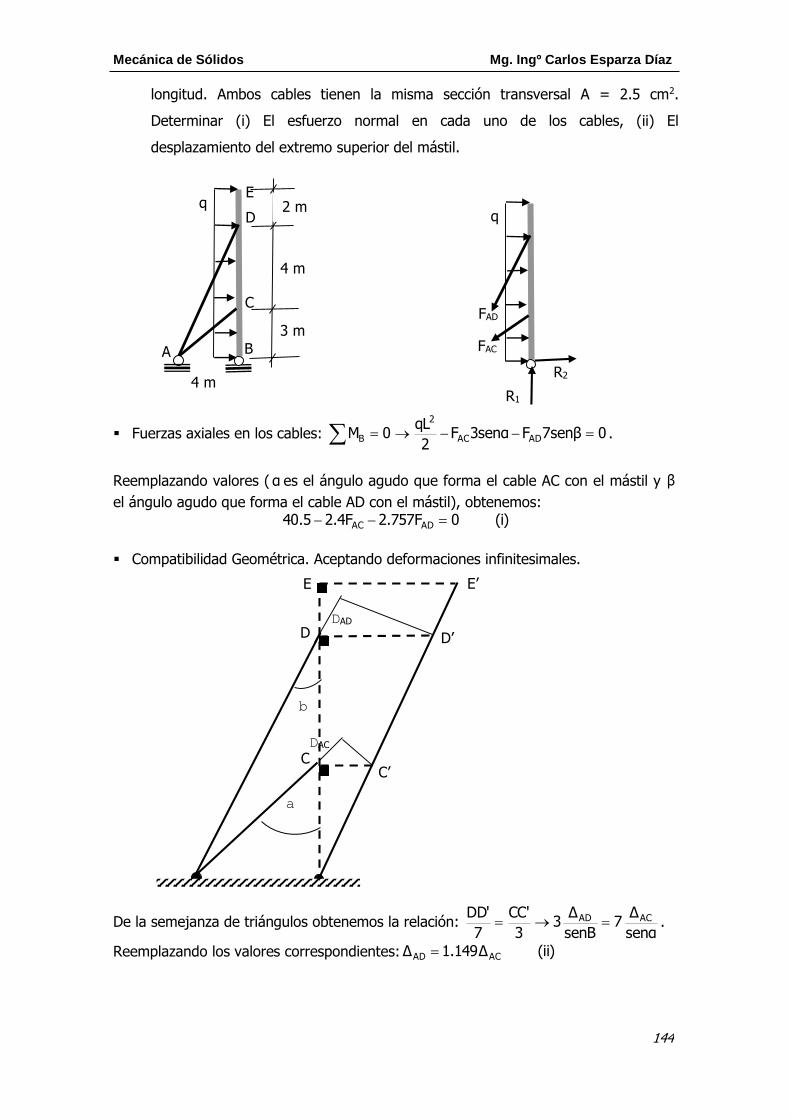
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
144
longitud. Ambos cables tienen la misma sección transversal A = 2.5 cm2.
Determinar (i) El esfuerzo normal en cada uno de los cables, (ii) El
desplazamiento del extremo superior del mástil.
Fuerzas axiales en los cables: 0βsen7Fαsen3F2
qL0M ADAC
2
B .
Reemplazando valores (α es el ángulo agudo que forma el cable AC con el mástil y β
el ángulo agudo que forma el cable AD con el mástil), obtenemos: )i(0F757.2F4.25.40 ADAC
Compatibilidad Geométrica. Aceptando deformaciones infinitesimales.
De la semejanza de triángulos obtenemos la relación: αsen
Δ7
Βsen
Δ3
3
'CC
7
'DD ACAD .
Reemplazando los valores correspondientes: )ii(Δ149.1Δ ACAD
E
D
C
B A
4 m
3 m
4 m
q
FAD
FAC
R2
R1
2 m q
E’ E
D’ D
C’ C
b
a
DAD
DAC
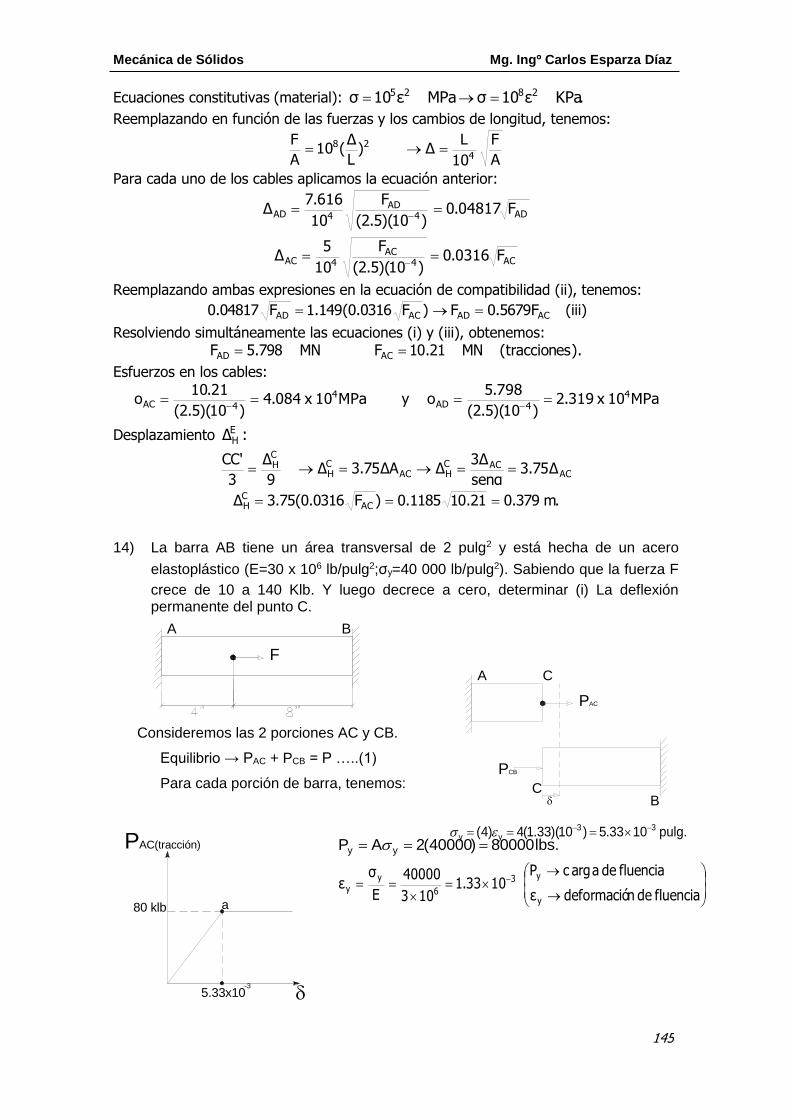
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
145
Ecuaciones constitutivas (material): .KPaε10σMPaε10σ 2825
Reemplazando en función de las fuerzas y los cambios de longitud, tenemos:
A
F
10
LΔ)
L
Δ(10
A
F4
28
Para cada uno de los cables aplicamos la ecuación anterior:
AD4AD
4AD F04817.0)10)(5.2(
F
10
616.7Δ
AC4AC
4AC F0316.0)10)(5.2(
F
10
5Δ
Reemplazando ambas expresiones en la ecuación de compatibilidad (ii), tenemos:
ACADACAD F5679.0F)F0316.0(149.1F04817.0 (iii)
Resolviendo simultáneamente las ecuaciones (i) y (iii), obtenemos: ).tracciones(MN21.10FMN798.5F ACAD
Esfuerzos en los cables:
MPa10x319.2)10)(5.2(
798.5οyMPa10x084.4
)10)(5.2(
21.10ο 4
4AD4
4AC
Desplazamiento :ΔEH
ACACC
HACCH
CH Δ75.3
αsen
Δ3ΔAΔ75.3Δ
9
Δ
3
'CC
.m379.021.101185.0)F0316.0(75.3Δ ACCH
14) La barra AB tiene un área transversal de 2 pulg2 y está hecha de un acero
elastoplástico (E=30 x 106 lb/pulg2;ϭy=40 000 lb/pulg2). Sabiendo que la fuerza F
crece de 10 a 140 Klb. Y luego decrece a cero, determinar (i) La deflexión permanente del punto C.
Consideremos las 2 porciones AC y CB.
Equilibrio → PAC + PCB = P …..(1)
Para cada porción de barra, tenemos:
lbs. 80000)40000(2AP yy
fluencia de ndeformacióε
fluencia de aargcP 1033.1
103
40000
Ε
σε
y
y3
6
yy
F
A B
PAC
A C
C
PCB
B
80 klb
PAC(tracción)
5.33x10-3
a
pulg. 1033.5)10)(33.1(4)4( 33yy

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
146
lbs. 80000)40000(2AP yy
Para F=140klb.
Suma de diagramas:
(PAC + PCB = P)
pulg. 108 3
En la descarga, la gráfica es paralela a la parte inicial ( . _ . _ . _)
Semejanza: pulg. 10222.6120
140
1033.5
3r3
r
Deflexión permanente de C:
lgpu 10778.1
.lgpu 10222.6 - 108
3P
3r
3p
15) La figura representa una barra de material Viscoelástico tipo MAXWEL
(constantes E,η1), rodeada de un tubo cilíndrico de material elástico – lineal
(módulo E2). La barra y el tubo cilíndrico están conectados a una placa rígida, de
peso despreciable, y a un soporte superior rígido. Una fuerza F se aplica
80 klb
Pcb(compresión)
5.33x10-3
b
10.67x10-3
40 klb
erecuperabl
permanente
r
P
F
5.33x10-3
b
10.67x10-3
160klb
140klb120klb
a
8x10-3
P
r

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
147
súbitamente en el instante t= 0. Calcular los esfuerzos que se generan en la
barra y en el tubo cilíndrico.
Área transversal de la barra → A1
Área transversal del tubo → A2
Equilibrio:
tubo el en Esfuerzo
barra la en Esfuerzo
)1(....................FAA
2Z
1Z
22Z11Z
Aceptando que las áreas permanecen
(sensiblemente) constantes:
)2(..........0A
tA
t2
2Z1
1Z
Compatibilidad: Las deformaciones Z deben ser iguales en cualquier tiempo:
)3....(....................
tt
2Z1Z
2Z1Z
Materiales:
Material Viscoelástico (tipo Maxwell) Ecuación Constitutiva:
ZZZ .
1.
t
1
t
Material Elástico Lineal (tipo Hooke)
ZZ
Para el tubo: →
)4...(..........t
1
t
2t2Z
2Z2Z
Para la barra →
)5....(....................1
t
1
t 1z
1
1z
1
1Z
Reemplazando (4) y (5) en la ecuación de Compatibilidad (3), tenemos:
)6..(........................................
1
t
1
t 1z
1
1z
12
2Z
De la ec. (2) obtenemos
)7......(....................tA
A
t
1z
2
12Z
Reemplazando (7) y (6):
PLACA RÍGIDA
Z
Y
F
1
2
Elasticidad Viscosidad
z z
Ez z

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
148
)8.....(....................
1
t
1
tA
A11z
1
1z
1
1z
2
1
2
Expresión que puede escribirse:
)9.....(..............................0
1
t
1
A
A1z
1
1z
122
1
Separando variables:
)10.........(..............................0t11
A
A
11z
1z
122
1
Integrando:
t
1Ln
1
A
A
11z
122
1
Pasando a la forma exponencial, tenemos:
tAA
A
1z1
2
2
11
2
A partir de la ec. (1) se calcula: 2Z :
1z
122Z
A
1F
A
1
NOTA> La constante K se conocerá cuando se tenga un valor del esfuerzo 1Z en un
tiempo dado.
1.14) Deformación Unitaria Cortante. Módulo de Rigidez
Es posible realizar ensayos en laboratorio, en los cuales ciertas probetas prismáticas
especiales son cargadas exclusivamente en Estado de Esfuerzo Cortante.
P
L
h
a
BASE RÍGIDA
P: aplicada gradualmente
P
P
Q
Q
L
hEquilibrio
Ph=QL
La cara superior del bloque prismático sufrirá un desplazamiento respecto a la sección
fija.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
149
En valor promedio se presentan esfuerzos
cortantes en 4 caras del sólido:
ha
Q ó
La
P
(iguales
puesto que Ph= QL)
Para materiales isotrópicos se observa:
(i) El esfuerzo cortante SÓLO PRODUCE DISTORSIONES de los ángulos
rectos (Deformaciones de Cortante).
(ii) Los esfuerzos cortantes NO AFECTAN las deformaciones normales.
Si la carga P se aplica gradualmente (por incrementar) pueden registrarse los
corrimientos ocasionados. Los resultados se representan en un Diagrama
Constitutivo P - . De manera alternativa, puede obtenerse un Diagrama Constitutivo
- .
La constante G → se denomina MÓDULO DE RIGIDEZ (o MÓDULO DE
ELASTICIDAD CORTANTE) .
Físicamente, G representa un valor del esfuerzo cortante que ocasiona una
distorsión unitaria 1 . (G tiene unidades de esfuerzo).
1
1
P
k'
La parte inicial recta
tiene por ecuación GLa parte recta (inicial)
tiene por ecuación P=k'
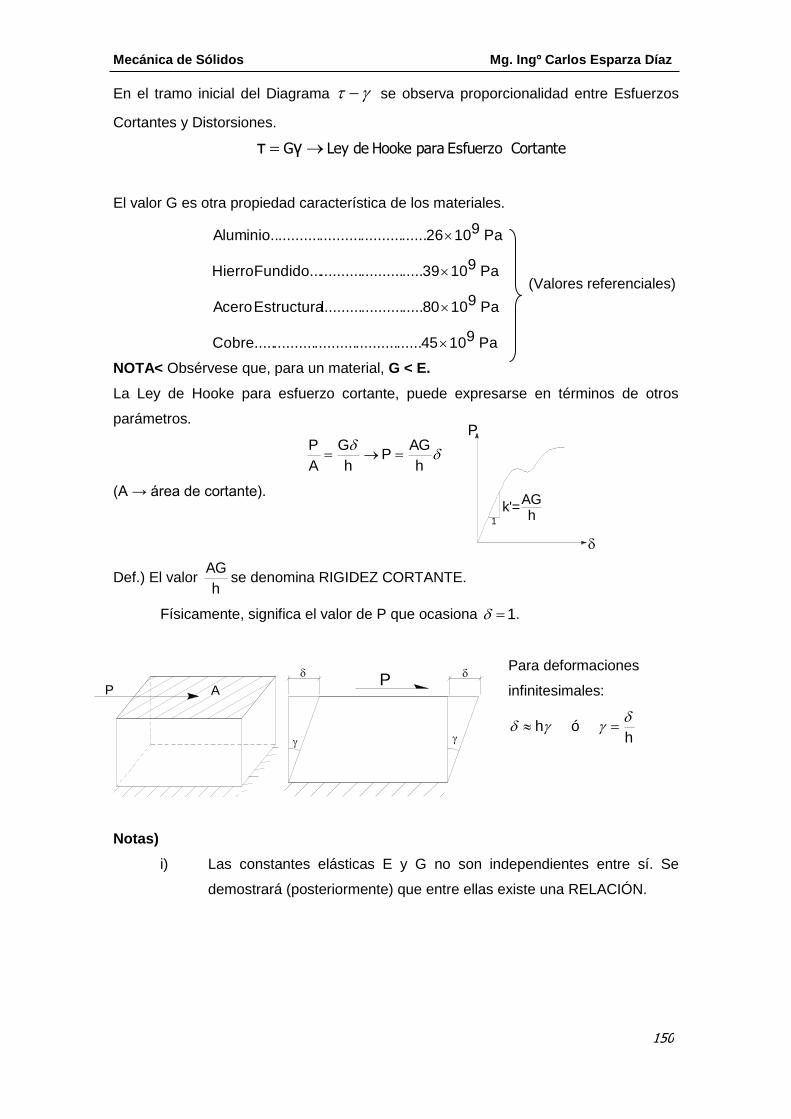
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
150
En el tramo inicial del Diagrama se observa proporcionalidad entre Esfuerzos
Cortantes y Distorsiones.
Cortante Esfuerzo para Hooke deLey G γτ
El valor G es otra propiedad característica de los materiales.
Pa 91054....................................Cobre.....
Pa 91008...............l.........Estructura Acero
Pa 91039.........................Fundido... Hierro
Pa 91026....................................Aluminio..
(Valores referenciales)
NOTA< Obsérvese que, para un material, G < E.
La Ley de Hooke para esfuerzo cortante, puede expresarse en términos de otros
parámetros.
h
AGP
h
G
A
P
(A → área de cortante).
Def.) El valor h
AGse denomina RIGIDEZ CORTANTE.
Físicamente, significa el valor de P que ocasiona 1 .
Para deformaciones
infinitesimales:
h ó h
Notas)
i) Las constantes elásticas E y G no son independientes entre sí. Se
demostrará (posteriormente) que entre ellas existe una RELACIÓN.
1
P
k'=AGh
P A
P

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
151
Z
Y
x
zy
yzzy
yz
dx
dz
dy
1
Esfuerzo
E
1.67x10-3
1.05x10-3
1G
k/cm2
k/cm2
Deformación Unitaria
E k/cm2
G k/cm2
(Material Acero Estructural)
1.14.1) Esfuerzo Cortante en Planos Perpendiculares
Consideremos un prima infinitesimal,
sometido a ESTADO PLANO de Esfuerzo
Cortante: (Dos caras paralelas libres de ).
En consecuencia: “Los esfuerzos cortantes que actúan en planos
perpendiculares son numéricamente iguales”:
(NO)
Ambos cortantes, o se dirigen hacia la arista común, o se alejan de ella.
EJEMPLOS
1) En el sistema representado, la carga P=27kN debe producir una deflexión
vertical de 2mm., a la placa rígida AB. Hallar las dimensiones mínimas a y b
necesarias. Considerar: mm600e;MPa18G;MPa5.1ad (┴ al plano
de dibujo)
etc). ...... ; ; :scommutable s(Subíndice
Cortante. Esfuerzo del adReciprocid de
Ley denominada :ndoSimplifica
0zyxyzx
0M
yxxysrrs
ZYYZ
ZYYZ
x
,
)()(

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
152
P/2
b
mm
mm
P=27KN
RígidoRígido
1 2 1 2
Deformación
b
a a
Por la simetría total, consideramos sólo una “parte”:
be2
p
Condición ii)
be
2P
Esfuerzos i)
ad
Reemplazando valores, tenemos:
0.15mb
0.15mb donde de ,105.1)1060)(b(2
1027
mín
6
3
3
m024.0am024.000833.0
102a
aa:males)infinitesi ones(deformaci eometríaG iv)
Rad. 083.0108.1
105.1
:valores doreemplazan ,G
G :Hooke deLey iii)
mín
3
6
6
2) Se elabora un dispositivo adhiriendo una varilla A, de radio r1, y el tubo B,
de radio r2, a un cilindro hueco de cierto material a ensayar.
Designando por G al módulo de rigidez del material, expresar la deflexión
de la varilla A en función de Q,L,G, r1 y r2
Q
Espesor delgado (t->0)
QA
Material a ensayar
L

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
153
QA
Sea r el espesor ….. e , una capa (corteza) de material a ensayar,
ubicada a la distancia r del eje geométrico.
Superficie lateral de la corteza: rL2A
(Esta superficie es el área de corte)
El esfuerzo cortante generado, es:
1
2
r
r
r
rLn
rL2
Q
r
r
rL2
Q
r
r
rL2
Q
)G Hooke deLey (usando rrL2
Qr
G
males).infinitesi nes(defomacio r
rL2
Q
A
Q
2
1
3) Un tubo cilíndrico de radios OS= r1 Y OB = r2 y altura h, es de un material
cuyo modulo elástico de corte es G. La superficie interior se mantiene fija y
la externa se sujeta con un anillo que permite aplicar fuerzas P, según se
indica en el esquema. Calcular el desplazamiento elástico del punto B con
respecto al punto fijo A.
(h → ┴ al plano de representación).
A la distancia r del punto O, se generan
esfuerzos cortantes uniformemente
distribuidos en la superficie lateral de un
dr
d dr
dr
rr1
r2
d
L
P
P
B
A
o
a

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
154
rT
T=Pa
cilindro de radio r y altura h (CORTEZA). 21 rrr .
Los esfuerzos en el área indicada, generan, a su
vez, un momento respecto al eje, que equilibra al par
aplicado T=Pa.
2
2
2
2
0
2
A
2
0 A
hr2
Parh2Pa Luego
rh2hrhrrrAT
NOTA> Visualizar el elemento de área:
Consideramos el elemento de cilindro, definido por .r;r;r; 21
Respecto al punto M, el punto N experimenta un
deslizamiento
drd
dA=r hd
B
A(fijo)
M
N
O
d
r
dr
G siendo , rv
A)fijo punto al (respecto
B punto
del entoDesplazami r
1
r
1
hπ2G
Pa v
hπ2G
Pa
r
r
hπ2G
Pav
rhrπ2
Pa
G
1 v
rγ v
será B, punto del ntodeslizamie El
M). en recto ángulo del (Variación
unitariaangular ndeformació la
21
r
r
r
r
2
r
r
2
r
r
r
12
1
2
1
2
1
2
1
M
N
dr
N'
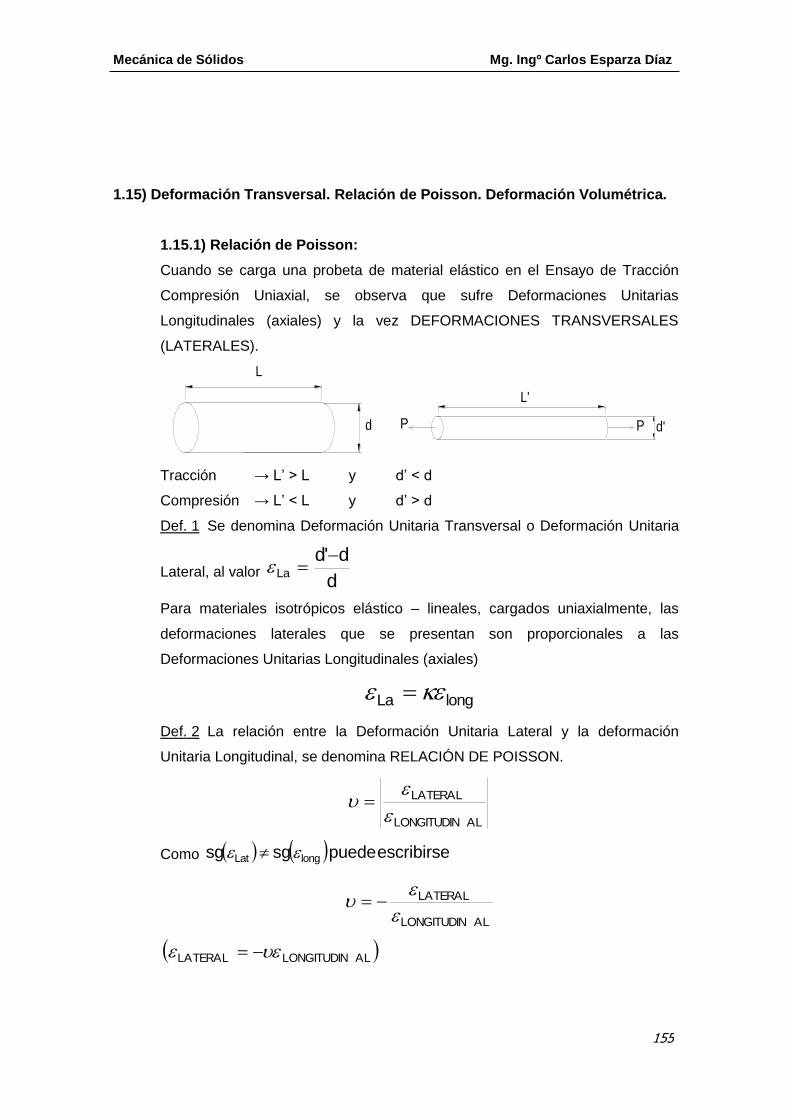
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
155
1.15) Deformación Transversal. Relación de Poisson. Deformación Volumétrica.
1.15.1) Relación de Poisson:
Cuando se carga una probeta de material elástico en el Ensayo de Tracción
Compresión Uniaxial, se observa que sufre Deformaciones Unitarias
Longitudinales (axiales) y la vez DEFORMACIONES TRANSVERSALES
(LATERALES).
Tracción → L’ > L y d’ < d
Compresión → L’ < L y d’ > d
Def. 1 Se denomina Deformación Unitaria Transversal o Deformación Unitaria
Lateral, al valor d
d'dLa
Para materiales isotrópicos elástico – lineales, cargados uniaxialmente, las
deformaciones laterales que se presentan son proporcionales a las
Deformaciones Unitarias Longitudinales (axiales)
longLa
Def. 2 La relación entre la Deformación Unitaria Lateral y la deformación
Unitaria Longitudinal, se denomina RELACIÓN DE POISSON.
ALLONGITUDIN
LATERAL
Como escribirse puede sgsg longLat
ALLONGITUDIN
LATERAL
ALLONGITUDINLATERAL
L
d PP
L'
d'

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
156
xy
Z
x
x
La relación de Poisson es una cantidad positiva, adimensional, y generalmente
es determinada experimentalmente. Es también una constante característica de
los materiales.
34.0....................................Cobre.....
15.0...............l.........Estructura Acero
0.30 a 0.25.........................Fundido... Hierro
0.33....................................Aluminio..
(Valores referenciales)
NOTAS>
i) Material elástico, lineal e isotrópico:
Un elemento prismático sometido a
Esfuerzo Normal Uniaxial x , sufre
una deformación unitaria.
xx
.
Si el material es isotrópico, se
presentan deformaciones
transversales iguales (en las
direcciones y, z)
x
.isotropía) la (Por
zy
ii) En materiales elástico lineales e isotrópicos, las constantes elásticas ,
SON INDEPENDIENTES de la orientación del esfuerzo normal uniaxial.
iii) Las constantes elásticas ,G, NO son independientes. Se demostrará
(posteriormente) que entre ellas existe la relación :
G
)1(2G
MATERIAL
MATERIAL
E,
E,

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
157
1.15.2) Deformación Volumétrica:
Consideramos un prisma de material
elástico, lineal e isotrópico, sometido a
esfuerzo normal en una dirección.
V0=abc (volumen inicial).
Longitud Final de las aristas:
)1(a'aa
a'axx
)1(b)1(b'bb
b'bxyy
)1(c)1(c'cc
c'cxzz
Puesto que no se presentan distorsiones, el volumen final, es:
2xx
xxx
)1)(1(abcV
)1(c)1(b)1(a'c'b'aV
Def.) Se denomina Deformación Volumétrica (Cambio Unitario de Volúmen) al
cociente:
INICIAL
INICIALFINAL
V
VV
V
Vv
abc
abc)1)(1(abcv
2xx
Simplificando, obtenemos )21()2(v x
2
x
3
x2 .
Para deformaciones infinitesimales 0 y 2
x
3
x , y con suficiente
aproximación.
)21(VV También
)21(v ò
)21(v
x0
x
x
NOTA>. Puesto que 0x , esperamos que 0v , luego 0)21(
xy
ab
c
z
xx
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
158
2
10
que tenemos ,0 definición por como y,2
1
ellas. de ena cionado
-trac ser al sdireccione varias en estirarse podría que ,IMAGINARIO MATERIAL0
nulo).
sería volúmen de cambio (su bleimcompresi nteperfectame IDEAL, MATERIAL2
1
te.lateralmen
CONTRAERSE SIN dirección una en estirarse pudiera que IDEAL, MATERIAL0
EJEMPLOS
1) Una placa de aluminio está sometida a esfuerzo normal. Sabiendo que, antes
de actuar la carga, se trazó una recta con pendiente 2:1, hallar la pendiente de
la línea cuando 272x lb/pulg 10E 0.33,0 ;Klb/pulg 18 .
21L
v
vL'
x x=18000 lb/pulg2
a
b
a'
b'
a'>a
b'>bx x

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
159
1
995.1m
escribirse puede que fracción
0018.01
001188.02m )( en doReemplazan
001188.0
10
18000)33.0(2)(2
0018.010
18000 Tambien
longitud) de (Cambios 1 ; 2 Pero
)....(..........1
2'L de Pendiente
L'
L'
7v
7
2) Hallar el cambio de altura y de volumen para el elemento representado.
Considerar 242y Klb/pulg 103E 0.3, n);(compresióKlb/pulg 12
4
4
y
0
44y
4
4
y
y
10613021103
12v
21v ó V
Vv
: Volúmende Unitario Cambio
pulg.10241046hh
104103
12
..
)(
2240
0
pulg 012060644
1061vVV V
Vv ..
3) Una barra de acero ABC transmite una fuerza axial de tracción de modo que el
cambio total de longitud es 0.6mm. Calcular, en cada tramo, el cambio de
longitud y de diámetro.
Considerar GPa2000E 0.3,
y
h=6"
d=4"
INDICA PÉRDIDA DE VOLUMEN
500
d=20mm
P
P
P
P d=13mm
750

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
160
P967533
10134
P
Newtons en P
(Pascales) P093183
10204
P
:Esfuerzos
23BC
AB
23AB
.
.
.
P10767310200
P967533
P10592110200
P093183
:Unitarias nesDeformacio
8
9BC
BC
8
9AB
AB
..
..
m1086421020321013dd
m1086110391020dd
:diámetros los en Cambio
10203219496.310767330
1039
19496.310592130 :Laterales nesDeformacio
m106753 19496.31051883c
m103282 19496.3101194 Luego
Newtons. 19496.3 P :obtenemos donde de
P1051883 P1011941060 :Condición
(mm) P1051883P10767310500 L
(mm) P101194P10592110750 L : tosAlargamien
643BCBCBC
653ABABAB
48BCBC
5AB
8ABAB
411B
411AB
11113BCAB
1183BCBCBC
1183ABABAB
..'
..'
...'
.'
..'
..
.
..
..
.
4) El cambio de diámetro de un perno de acero ha sido medido cuidadosamente
luego de ser apretada la tuerca. Sabiendo que GPa200E 0.29, ,
determinar la fuerza interna en el pero, si se observa que el diámetro se ha
acortado en 13x10-6m.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
161
dinicial=60mm
PERNO x
Pascales 104514910216700.29
10200
Poisson de Relación
10216701060
1013-
d
y Luego m10-13y diámetro del nDisminució
63-9
x
yxx
y
3-
3-
6-
y
inicial
y6-
..
.
.
Newtons 1056422F
104514910604
AF perno el en AxialFuerza
3
623x
INICIAL
.
.
5) El tubo de acero que se representa, esta sometido a carga axial centrada P. El
material tiene constantes .E, Calcular el cambio unitario de volumen.
21dE3
P4
V
V21
V
V
dE3
P4
d3
P4
dd24
P
2x
2
xx
222
x
6) Para el sistema representado, calcular el cambio de volumen. Considerar el
material con constantes elásticas .E,
P
P
d 2d
L

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
162
: xsección la en interna Fuerza
xL
qxq carga la de nRepartició
L
qAqALqLq
0B0B0A00q
BAxxq
2
x
L
qPN
xxL
qPxxq-PN
x.longitud de trozo
el en xq de resultante la R siendo ;RPN
2
x
0
x
0
FL21
V
A
FLA
21
A
F21
VVconstante axial fuerza Fla siendo
A
F
constante supuso se donde 21
VV de partir a calcula se volúmen de cambio El
(i) 2
qLP0
2
x
L
qP0NL xCuando :CONDICIÓN
0
0
0
0
0
x
xx0
2
.,
F F
L
Aoinicial
P
L
x
q=0
q
P
x
N

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
163
PL
21
3
2
3
PLPL
21V
luego 6
qL
3
PL (i) condición la Por
6
qLPL
21x
2
x
L
qP
21V Luego
Axial
FuerzaF(x)F cuando usarse puede que xF
21V
xFFL
:que presente teniendo usarse, puede todavía ecuación la variable, es axial fuerza la Si
2
2L
0
2
L
0
L
0
,
1.16) Sistemas Estáticamente Indeterminados
1.16.1) Introducción. Definiciones:
Un sistema elástico lineal se define como sistema estáticamente indeterminado
(hiperestático) cuando NO ES POSIBLE, usando únicamente las ecuaciones
de equilibrio, calcular las reacciones externas y/o las fuerzas internas.
Para solucionar sistemas hiperestáticos es necesario desarrollar ecuaciones
adicionales, basadas en las propiedades del material u las características de
las deformaciones. Tales ecuaciones suelen llamarse Ecuaciones de
Compatibilidad.
Por ejemplo → Armadura con dos apoyos fijos (articulaciones)
P
Q
P
Q
R3
R4
R2
R1
SISTEMA HIPERESTÁTICO EXTERNO DE 1er ORDEN O GRADO DE
HIPERESTATICIDAD (GRADO = Nº INCÓGNITAS – Nº ECUACIONES
ÚTILES).

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
164
Para este caso, debe plantearse UNA ECUACIÓN ADICIONAL.
(EXTERNO → Las incógnitas son Fuerzas de Reacción).
Sistema de tres barras concurrentes.
Nº INCÓGNITAS → 3(Fuerzas de Barra)
Nº ECUACIONES → 2(Equilibrio Nudo A).
→ SISTEMA HIPERESTÁTICO
INTERNO DE 1er ORDEN.
Debemos plantear una ECUACIÓN
ADICIONAL
(INTERNO → Las incógnitas son Fuerzas
Internas).
Existen sistemas que, a su vez, son hiperestáticos externos – internos.
53-(4)2b3-2nb :estática
condición la que más una barras, 6 INTERNO
INCÓGNITAS 6
yEQUILIBRIO DE EC. 3 EXTERNO
Sistema Hiperestático externo de 3er orden y, a la
vez, Hiperestático interno de orden 1.
1.16.2) Principio de Superposición:
En SISTEMAS ELÁSTICOS – LINEALES, el efecto producido por un
CONJUNTO DE ACCIONES es igual a la suma (superposición) de los
efectos producidos por las acciones individualmente.
P
A
1)
2)
3)
PQ

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
165
P
Q
P
Q
12
3 4
5 12
3 4
5 12
3 4
5
Fuerzas AxialesFi
(i=1,2,...)
Fi' Fi''
Fi=Fi'+Fi''
EJEMPLOS
1) Hallar las reacciones en los apoyos, aceptando material de comportamiento
elástico – lineal. Considerar constante a la rigidez de la sección (EA).
i) EQUILIBRIO:
)........(1P.........RR BA
Sistema Hiperestático (Externo) de 1er grado. Debemos planear una ecuación
adicional.
ii) COMPATIBILIDAD:
Como los apoyos A y B son fijos, el cambio total de longitud de la barra deber ser
NULO: 0AB
)........(20......... ó CBAB
iii) MATERIAL(LEY DE HOOKE):
nto)(alargamie EA
aR.RF A
ACA1
nto)(acortamie EA
bR-
.RF
BCB
B2
P
BA C
a b
BA C
RA RB
A
RA F1
TRAMO AC
TRAMO CB
B
RB
F2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
166
Reemplazando en (1) )3...(..........0EA
bR-
EA
aR BA
Resolviendo el sistema de ecuaciones (1) y (3):
ba
aPR
ba
bPR BA
2) Hallar la fuerza en cada barra de la armadura representada. Suponer material
elástico lineal (módulo E) y sección transversal A en todas las barras
i) Equilibrio (Nudo A):
Orden) 1 de tico(Hiperestá
)2.......(..........0PsenFsenF
)1..(....................0cosFcosF
er
31
31
ii) Compatibilidad:
)..(....................sen
)..(....................sen
23
21
iii) Material (Ley de Hooke): EA
LF
EA
FL 1
1
1
EA
LsenF
EA
FL 2
2
2
EA
LF
EA
FL 3
3
3
Reemplazando en (*) y (**)
)3(..........senFFsenEA
LsenF
EA
LF 221
21
)4(..........senFFsenEA
LsenF
EA
LF 223
23
Resolviendo el Sistema de ecuaciones (1),(2),(3),(4)
Obtenemos: .sen21
PsenF . ;
.sen21
PF . ;
.sen21
.PsenF
3
2
3323
2
1
1)2)
3)
A
P
L L
P
F3F2
F1
1)2)
3)
A
A'
A
A'
A
A'

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
167
Nota> Observar que las ec. (2),(3) y (4) son las independientes. La ecuación (1)
proviene de (3) y (4).
3) Calcular los esfuerzos en las barras elásticas del sistema representado.
Considerar E=2x 106 Kg./cm2;A=4cm2 para todas las barras.
A
B
C
Rígida
q=28K/cm
1) 3)
2)
i) FUERZAS(INTERNAS):
A
B
C
q
F1
F2
F3
)2..(..........0)100)(200(28F100)50)(100)(28(F200 0M
)1....(........................................).........28)(300(FFF0F
COMPRESIÓN F ; TRACCIÓN F ; F
13B
321VERT
231
ii) Compatibilidad:
alargamientos
acortamientos
).........(023 3
1
Semejanza 3121312
iii) Material (Ley de Hooke):
A
B
C
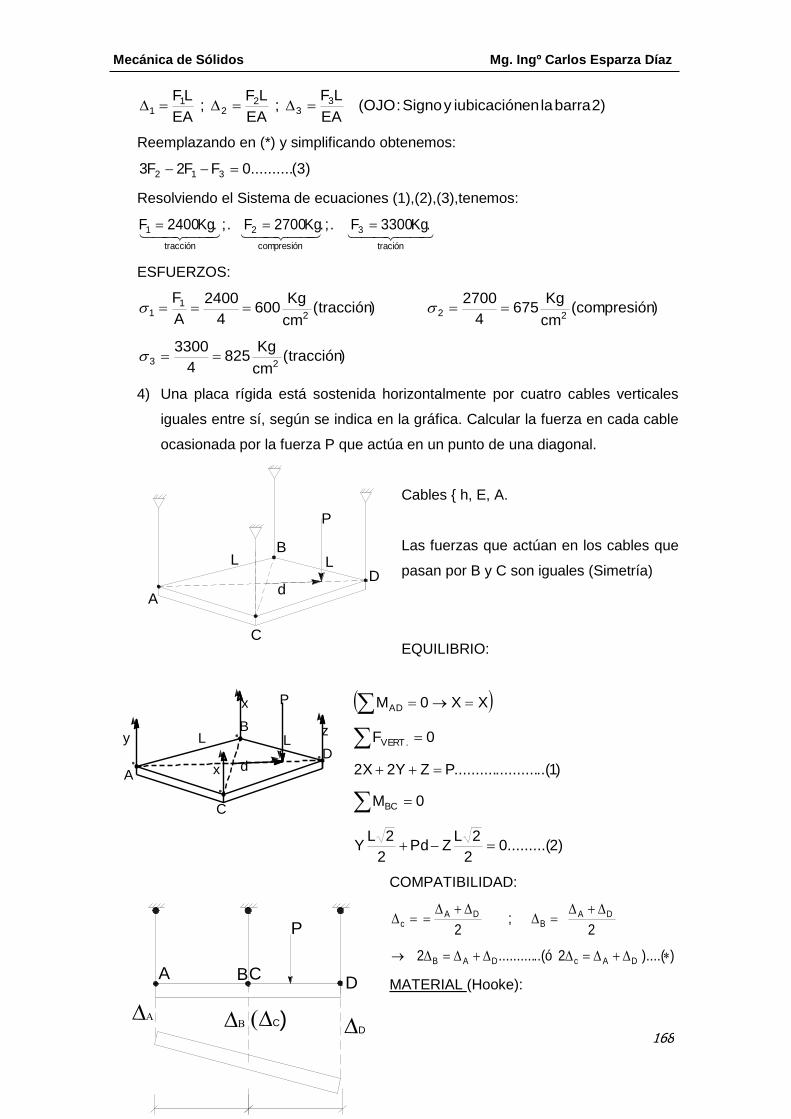
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
168
2) barra la en iubicación y Signo :(OJO EA
LF ;
EA
LF ;
EA
LF 33
22
11
Reemplazando en (*) y simplificando obtenemos:
)3(..........0FF2F3 312
Resolviendo el Sistema de ecuaciones (1),(2),(3),tenemos:
tración
3
compresión
2
tracción
1 .Kg3300F . ; .Kg2700F . ; .Kg2400F
ESFUERZOS:
)tracción(cm
Kg600
4
2400
A
F2
11 )compresión(
cm
Kg675
4
270022
)tracción(cm
Kg825
4
330023
4) Una placa rígida está sostenida horizontalmente por cuatro cables verticales
iguales entre sí, según se indica en la gráfica. Calcular la fuerza en cada cable
ocasionada por la fuerza P que actúa en un punto de una diagonal.
Cables { h, E, A.
Las fuerzas que actúan en los cables que
pasan por B y C son iguales (Simetría)
EQUILIBRIO:
)2.........(02
2LZPd
2
2LY
0M
)1..(....................PZY2X2
0F
XX0M
BC
.VERT
AD
COMPATIBILIDAD:
))....( 2 ó..(..........2
2
; 2
DAcDAB
DAB
DAc
MATERIAL (Hooke):
A
B
D
C
LL
P
d
A
B
D
C
LL
P
d
y
x
z
x
A CB
P
D
C) D

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
169
Reemplazando en (*):
).......( 3ZYX2EA
Zh
EA
Yh
EA
Xh2
Resolviendo el Sistema de ecuaciones (1),(2),(3) obtenemos:
2L
d
4
1PZ
2L
d
4
1PY
4PX
5) Dos barras de igual longitud y distinto material están íntimamente unidas entre sí y sometidas a la acción de una fuerza axial P. Calcular el esfuerzo en cada barra y el alargamiento correspondiente. Ambos materiales son lineal – elásticos.
P P
L
Placas Rígidas
Rigidéz E1A1
Rigidéz E2A2
FUERZAS
......PAA ó
PPP Equilibrio
2211
21
P1
P2
P1
P2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
170
L E
σLΔ con resultadosimilar
AEAE
PLLΔ
:TOSALARGAMIEN
AEEA
PEσσ
E
Eσ De
AEEA
PE
AE
EA
Pσ De :ESFUERZOS
...... AE
EAσA
E
EσAσP : en osReemplazam
...... E
σ
E
σεε :Hooke) de(Ley AxialnDeformació
2
2
2211
2211
221
1
22
2211
1
21
21
1
21
2112
1
2111
2
2
1
121
6) La placa rígida A tiene tres soportes, tal
como se indica en el esquema. El soporte
central es 0.001” más corto que los otros
dos. Una fuerza de 40Klbs. Actúa sobre A
de tal forma que la placa permanece en
posición horizontal. ¿Qué desplazamiento
experimenta la placa A?
E=3x 107 lb/pulg2;A=1pulg2 →3 soportes.
EQUILIBRIO:
GEOMETRÍA:
P
P
....lb40000FF2
PFF2
FFaFaF
PFFF
21
21
3131
321
0.001"
1) 2) 3)
P
A
6"
a a
P
F1 F2 F3

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
171
.....
..
.
5000F9990FF
00101103
9095F
1103
6F
1103
6F :Material
0010 Condición
231
7
2
7
3
7
1
231
pulg.0030
pulg.109992
1103
66614996 :1 barra la de toAlargamien
lbs6614996F :obtenemos , y ecuaciones las De
1
31
71
1
.
.
.
..
7) El sistema representado, está constituido por una barra rígida CB y dos barras
elásticas (1) y (2). Por error, el elemento (1) ha sido diseñado 0.05cm más
pequeño que lo necesario. Si durante el montaje las dos barras deben ir unidas
al elemento rígido, determinar los esfuerzos inducidos en éstas barras.
Considerar E=2x 106 Kg./cm2;A1= A2=A
2a a
2
1
0.05cm
a=1
BA
C D
3a
RIGID
A
i) Fuerzas Generadas (supuesto el ensamble):
2. y 1 sdeformable
barras las en inducidos)generados( osplazamient
-des los de S VERTICALESCOMPONENTE las por
cubierta ser debe distancia La :idadCompatibil
1F2
3F
0a3Fa2F0M
21
21c
.....
2a a
B
C
2a
a
Ry
Rx
F2
F1
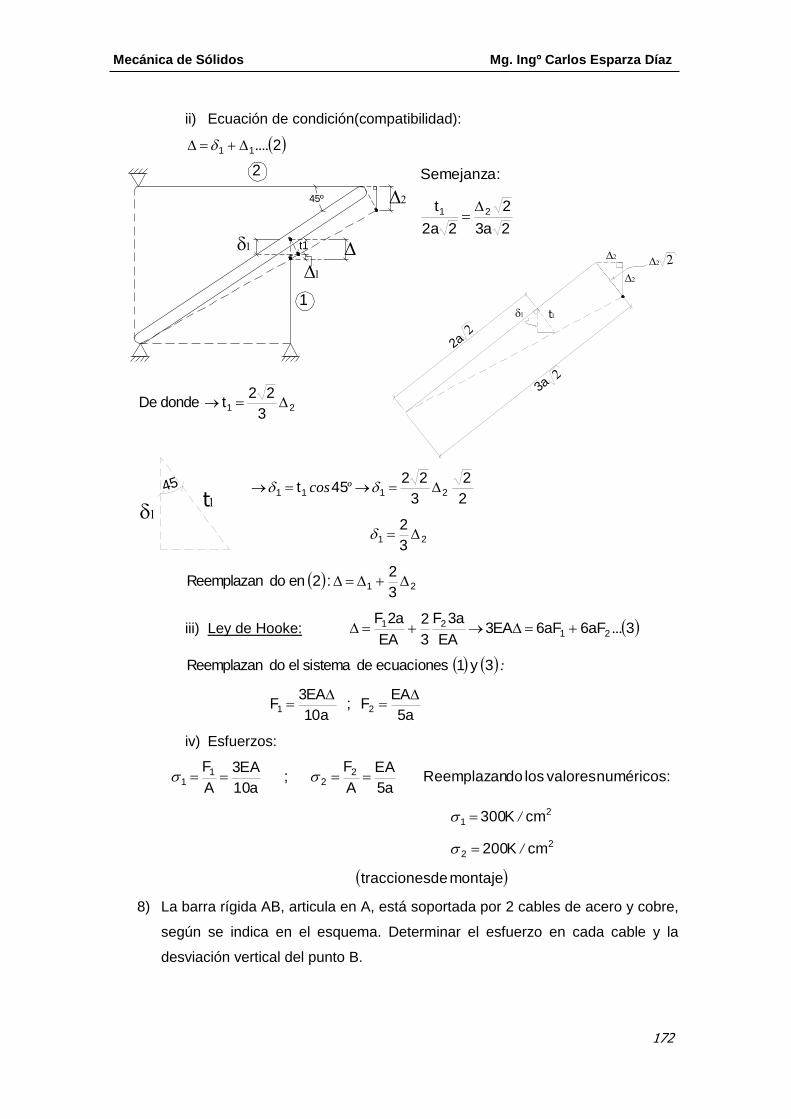
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
172
2
1
45º
t1
2a
3a
t
ii) Ecuación de condición(compatibilidad):
211 ....
2a3
2
22a
t
:Semejanza
21
213
22t donde De
21
2111
3
2
2
2
3
2245t
ºcos
213
2: 2 en doReemplazan
iii) Ley de Hooke: 3Fa6Fa6EA3EA
a3F
3
2
EA
a2F 21
21 ...
a5
EAF ;
a10
EA3F
3 y 1 ecuaciones de sistema el doReemplazan
21
:
iv) Esfuerzos:
montaje de tracciones
cmK200
cmK300
:numéricos valores los doReemplazan a5
EA
A
F ;
a10
EA3
A
F
22
21
22
11
/
/
8) La barra rígida AB, articula en A, está soportada por 2 cables de acero y cobre,
según se indica en el esquema. Determinar el esfuerzo en cada cable y la
desviación vertical del punto B.
t
45

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
173
;;
/.;/.
2cu
2ac
26cu
26ac
cm6Acm4A
cmK1070EcmK1012E
FUERZAS EN LOS CABLES:
2Ton 1Ton
A
Fac
Fcu
dadas sdimensione las de βsen y αsen
1...05.1200031004.2βsenF4.2αsenF0M accuA
DEFORMACIONES:
2180
300
61070
300F
sensen
6
cu
cucu
.....
3320
400
41012
400F
sensen
6
ac
acac
.....
ec.(3)ec.(2) ÚNICO
4320
400
41012
400F
180
300
61070
300F6
ac
6
cu .......
..
..
Kg 72272F
Kg 31136F obtenemos (4), y (1) ecuaciones las oResolviend
ac
cu
ESFUERZOS;
2cu2accm
Kg3189
6
31136
cm
Kg8156
4
72272.
..
.
Reemplazando en (2) o en (3): cm1350.
B
A C
D
2Ton
E
1Ton
1.5m 0.9m 0.6m
1.4m
1.8mCobre
Acero
A
BC
cu
Cobre
A
Aceroac
2.4m 0.6m

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
174
cm1680135042
3
42
3
342 Semejanza
B
BB
...
..
9) El sistema representado consta de una barra rígida AB, un resorte elástico
lineal fijo al extremo A (k=100Kg/cm.), y otro resorte fijo al extremo B
(k=50Kg/cm.). Se aplica una carga de 1000 Kg. en la posición indicada.
Calcular las fuerzas en los resortes.
Fuerzas:
A BC
1000Kg
F2F1
.....800F2F3
401000F100F1500M
21
21C
GEOMETRÍA:
.
B en resorte al comprime F
Aen resorte al extiende F
2
1
...............21
21
32
100150 Semejanza
2
22
1
11
222111
K
F
K
F
KF KF :Resortes
....................F3F
100F350F2KF3KF2
K
F3
K
F2 obtenemos , en doReemplazan
21
211221
2
2
1
1
Kg11
800F
Kg11
2400F
obtenemos , y oResolviend
2
1
A BC
1000KgRígida
K1=100Kg/cmK2=50Kg/cm
150cm 40cm 60cm
A BC
F1
F2
1000Kg

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
175
10) Calcular los esfuerzos normales que se generan en los elementos del sistema
elástico representado. Considerar E=2x 105 Kg./cm2;para las tres barras A1=
2.0 cm2 , A2=3.5 cm2, A3=4.0 cm2
Supuesto que no existiese la restricción del piso rígido, el
cambio de longitud, sería:
cm464010
80016000
3510
700160000
55T
321T
.
Puesto que 6.4>3.8, en el extremo libre se presentará
una Reacción, que impida el alargamiento total.
En función de R1, los cambios de longitudes son:
cm 10R1600024010
800R16000
cm 10R1600023510
700R16000
cmtoacortamien R10522010
500R
415
12
415
12
14
5
11
.
3.8cm''' :CONDICIÓN 321
traccióncmKg30040
400016000
traccióncmKg34335
400016000
compresióncmKg20020
4000 :Luego
Kg4000R :donde De
8310R16000210R160002 R1052
:tenemos do,Reemplazan
23
22
21
1
41
411
4
/
/
/
.
..
11) Calcular los esfuerzos normales en las barras deformables del sistema
representado. Considerar E1= 0.7E2; A1= 2.0 cm2 , A2=4 cm2
3
2
1
8m
7m
5m
0.038m
16000Kg
3
2
1
16000Kg
R2
R1
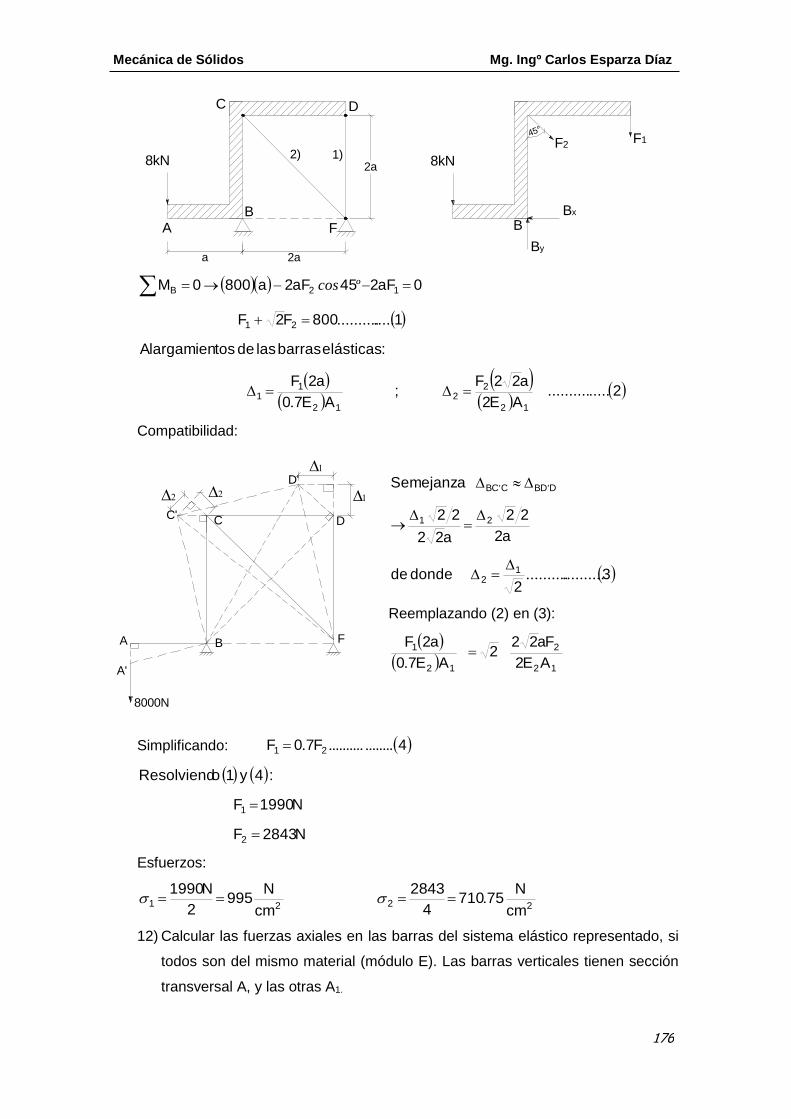
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
176
BA
C D
F
1)2)8kN
a 2a
2a 8kN
F2F1
B
By
Bx
45°
2............... AE2
a22F ;
AE70
a2F
:elásticas barras las de tosAlargamien
1800F2F
0aF245aF2a8000M
12
22
12
11
21
12B
.
...............
ºcos
Compatibilidad:
32
donde de
a2
22
a22
22
Semejanza
12
21
DBDCBC
....................
''
Reemplazando (2) en (3):
12
2
12
1
AE2
aF22 2
AE70
a2F
.
Simplificando: 4F70F 21 ...................
N2843F
N1990F
:4 y 1 oResolviend
2
1
Esfuerzos:
2221cm
N75710
4
2843
cm
N995
2
N1990.
12) Calcular las fuerzas axiales en las barras del sistema elástico representado, si
todos son del mismo material (módulo E). Las barras verticales tienen sección
transversal A, y las otras A1.
8000N
A
A'
B
C D
F
D'
C'

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
177
Debido a la simetría (total) del sistema, sólo existen 3
incógnitas:
eshorizontal barras las en fuerza Z
diagonales barras las en fuerza Y
verticales barras las en fuerza X
EQUILIBRIO DE UN NUDO:
ii0PYsenX
i0YZ
..........
..........cos
GEOMETRÍA: Después de la deformación, las barras
exteriores seguirán formando un rectángulo (simetría) .
dd
hh
aa
1ddddd iagonalesd arrasB
1hhhhh verticales arrasB
1aaaaa eshorizontal arrasB
iii1h1a1ha
1h1a1d :CONDICIÓN
2h
22a
22d
22
2h
22a
22d
2
................
Hooke) de(Ley EA
X;
EA
Z ;
EA
Y- :MATERIAL h
1
a
1
d
Reemplazando en (iii), tenemos:
ivEA
X-1h
EA
Z1a
EA
Y-1ha
2
2
2
1
2
2
1
22 ................
APROXIMACIÓN → TÉRMINOS DE 2do ORDEN 0 . Luego:
v
EA
Za
EA
Xh
EA
Yha
1
22
1
22
...............
Resolviendo las ecs. (i), (ii),(v) obtenemos:
Z.X, obtendrán se (ii) y (i) con
senA
A
h
a
A
A
h
ha
PY
12
2
12
22
cos
13) Dos cables idénticos sostienen una barra rígida horizontal AB de longitud 3b,
que soportan una carga Q=20KN en el extremo B. La relación carga /
alargamiento viene dada por mm en KN; en Pmm600026.01
3.1P
,
donde P es la fuerza axial en un cable y el alargamiento. Determinar las
P P
P
a
h
X Y
Z

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
178
A B
1) 2)
Q=24KNb b b
(Sistema Hiperstático)
P
mm
tracciones F1, y F2 en los cables 1 y 2 respectivamente; los alargamientos de
los cables 21 y y el desplazamiento del punto B.
Debemos formular:
-) Una ecuación de equilibrio.
-) Ecuaciones de compatibilidad
-) Relación Carga/ Desplazamiento.
EQUILIBRIO:
aKN80Q3F2F
b3Qb2FbF0M
21
21A
...............
COMPATIBILIDAD:
c3
b2
1B
12
....
....
RELACIONES CARGA / ALARGAMIENTO: De la ecuación constitutiva:
e..... 02601
31F y d.....
02601
31F
2
22
1
11
.
.
.
.
SOLUCIÓN DE ECUACIONES:
Resolviendo el sistema simultáneo de ecuaciones (a),(b),(c),(d),(e); obtenemos:
INDICADOSISTEMA EL RESOLVER RESULTADOS VERIFICAR
mm600 intervalo el en y que notar
mm8674 ; 31.91mm ; 15.95mm ; KN6722F ; KN6614F
21
B2121
...
NOTAS>
Debido al comportamiento NO LINEAL de los cables, no es posible
encontrar las fuerzas y los desplazamientos para otros valores de Q, por
A B
Q
F1 F2
A B1) 2)
barra rígida
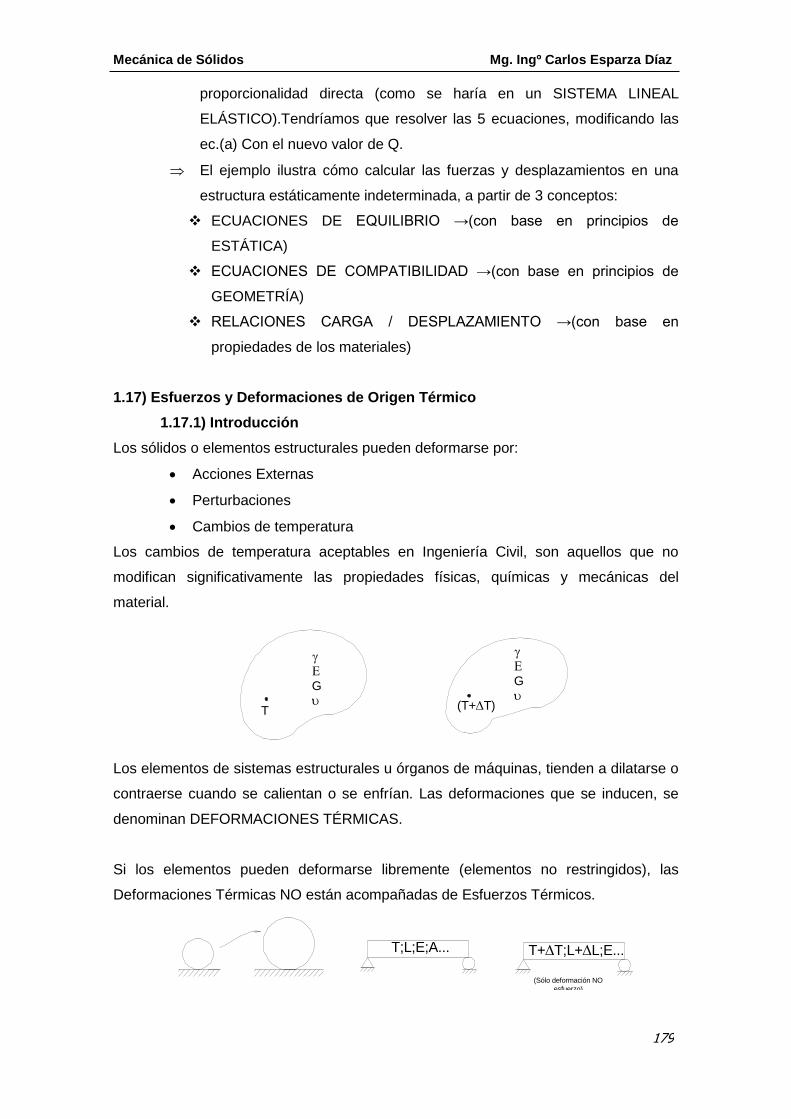
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
179
proporcionalidad directa (como se haría en un SISTEMA LINEAL
ELÁSTICO).Tendríamos que resolver las 5 ecuaciones, modificando las
ec.(a) Con el nuevo valor de Q.
El ejemplo ilustra cómo calcular las fuerzas y desplazamientos en una
estructura estáticamente indeterminada, a partir de 3 conceptos:
ECUACIONES DE EQUILIBRIO →(con base en principios de
ESTÁTICA)
ECUACIONES DE COMPATIBILIDAD →(con base en principios de
GEOMETRÍA)
RELACIONES CARGA / DESPLAZAMIENTO →(con base en
propiedades de los materiales)
1.17) Esfuerzos y Deformaciones de Origen Térmico
1.17.1) Introducción
Los sólidos o elementos estructurales pueden deformarse por:
Acciones Externas
Perturbaciones
Cambios de temperatura
Los cambios de temperatura aceptables en Ingeniería Civil, son aquellos que no
modifican significativamente las propiedades físicas, químicas y mecánicas del
material.
T (T+T)
G
G
Los elementos de sistemas estructurales u órganos de máquinas, tienden a dilatarse o
contraerse cuando se calientan o se enfrían. Las deformaciones que se inducen, se
denominan DEFORMACIONES TÉRMICAS.
Si los elementos pueden deformarse libremente (elementos no restringidos), las
Deformaciones Térmicas NO están acompañadas de Esfuerzos Térmicos.
T;L;E;A... T+T;L+L;E...
(Sólo deformación NO
esfuerzo)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
180
Si los elementos no pueden deformarse libremente (elementos total o parcialmente
restringidos) las deformaciones térmicas están acompañadas de Esfuerzos Térmicos.
T
L
(Apoyos Indeformables)
L
No se producen deformaciones,
pero se generan esfuerzos
T+T
1.17.2) Deformaciones Térmicas
Propiedades: Un sólido de material elástico isotrópico, no restringido y sometido a la
acción de un cambio aceptable de temperatura, sufre deformaciones térmicas iguales
en todas direcciones.
Def. La Deformación Térmica Unitaria se define por: L
LTT , donde LT es
el cambio de longitud total inducido por la acción térmica. (L → Longitud inicial
o de referencia, antes del incremento de temperatura).
Para cambios de temperatura aceptables, el incremento LT se mantiene proporcional
a la longitud inicial y al cambio de temperatura:
TLLT
a.temperatur de cambio el es TTT
inicial Longitud L
material). cada de ticocarácterís orLineal(Val Dilatación de eCoeficient
INICIALFINAL
En consecuencia, la Deformación Térmica Unitaria, es:
TL
TL
L
L TT
T
Nota> aTemperatur1 en expresa se αecoeficientEl
F10.3.4C.........1006.1..........o)........Madera(Pin
F10.12.9C.........1023.2........... ............Aluminio..
F10.6.5C.........1011.7............ lEstructura Acero
6-6-
6-6-
-6-6
Convenio:
nto)(enfriamie 0T si 0
ento)(calentami 0T si 0
T
T
Nota> Para sólidos elásticos no restringidos (de material isotrópico) las Deformaciones
Térmicas Unitarias son iguales:
TTz
Ty
Tx .

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
181
Los desplazamientos generados por las deformaciones térmicas pueden relacionarse
con las deformaciones térmicas unitarias, usando relaciones geométricas apropiadas
en cada caso. En algunos casos pueden usarse las relaciones diferenciales existentes
entre desplazamientos y deformaciones unitarias.
2
1 T
T
2
1
T+T
T+T
T1
T2
Ejemplo
1) Una varilla de acero cuya longitud es L=100” está fija por uno de sus extremos.
i) Si se presenta un F100T º uniforme, hallar el cambio de longitud.
ii) Si el cambio de temperatura es FL
x100T º
, hallar el cambio de
longitud.
Considerar F106 6 º
L=100"
X
TL
T+T
T
i)
pulg106L
100106LL
106
100106
T
2T
4TT
4T
6T
T
L
LTT
T
XL=100"
constante100ºF

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
182
T
XL=100"
100ºF
TL
T+x/L)
T
X
ii)
L
x106
L
x100106T
4T
6T
pulg.103 L 100"L Si
L10
3x
L
x
10
6L
xL
x
x :caso el Para
2T
4
L
0
4
T
L
TT
TT
1.17.3) Esfuerzos Térmicos
Fundamentalmente, los esfuerzos térmicos se generan en SÓLIDOS RESTRINGIDOS
total o parcialmente, al ser sometidos a cambios aceptables de temperatura.
Al incrementarse (o decrementarse) la temperatura,
se generan esfuerzos en el material del sólido.
Procedimiento para Evaluar T
Consideremos una barra de material lineal elástico (isotrópico), rígidamente sujetada
por sus extremos, sometida a un incremento aceptable de temperatura T .
E;A;T
L
INICIALL
E;A;T+T
FINAL
Supongamos T>0
(Apoyos Indeformables)
T

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
183
i) SÓLIDO LIBERADO
Consideramos liberado un vínculo o restricción y permitimos (idealmente) que
suceda el alargamiento.
TL
T+TTL=LT)
(alargamiento)
ii) FUERZA EXTERNA
Puesto que realmente existe vínculo, físicamente no puede generarse el cambio
de longitud LT , apareciendo fuerzas elásticas que contrarresten el supuesto
alargamiento.
L
TL
F
La fuerza F ocasiona un cambio de longitud A
FLL
(acortamiento elástico).
iii) COMPATIBILIDAD
Debido a que los apoyos no se mueven uno respecto del otro, es necesario que el
cambio de longitud debido al incremento de temperatura y el cambio de longitud
ocasionado por la Fuerza Elástica, se contrarresten. Es decir:
TTA
F donde de
A
FL-L)L(
LL
T
T
NOTAS> i) Si 00T T (COMPRESIÓN EN EL MATERIAL)
Si 00T T (TRACCIÓN EN EL MATERIAL)
ii) INICIALFINAL TTT
iii) En la solución de problemas es útil emplear el Principio
de Superposición.
EJEMPLOS
1) Las barras deformables del sistema representado sufren el mismo cambio de
temperatura. Calcular los esfuerzos que se generan

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
184
0TTT
AAA
EEE
a6LL
21
21
21
21
21
Sistema parcialmente restringido (Deformaciones compatibles con las condiciones
de sustentación)
EQUILIBRIO:
2a 3a
F1 F2
O
....................0AF5F2
0aF5aF20M
21
210
COMPATIBILIDAD:
.............TOTAL2TOTAL1
TOTAL2TOTAL1
25
a5a2
CAMBIOS DE LONGITUD:
EA
a6FTTa6
EA
a6FTTa6
201TOTAL2
ELÁSTICO EFECTO
1
TÉRMICO EFECTO
01TOTAL1
Reemplazando en
:
.................
EA
a6FTTa62
EA
a6FTTa65 2
011
01
Resolviendo el sistema de ecuaciones (*) y (**), obtenemos:
TTEA29
6F TTEA
29
15F 012011
Esfuerzos:
BA
1) 2)
2a 3a
O
1) 2)
2TOTAL
1 TOTAL
2TOTAL
1 TOTAL
2a 3a
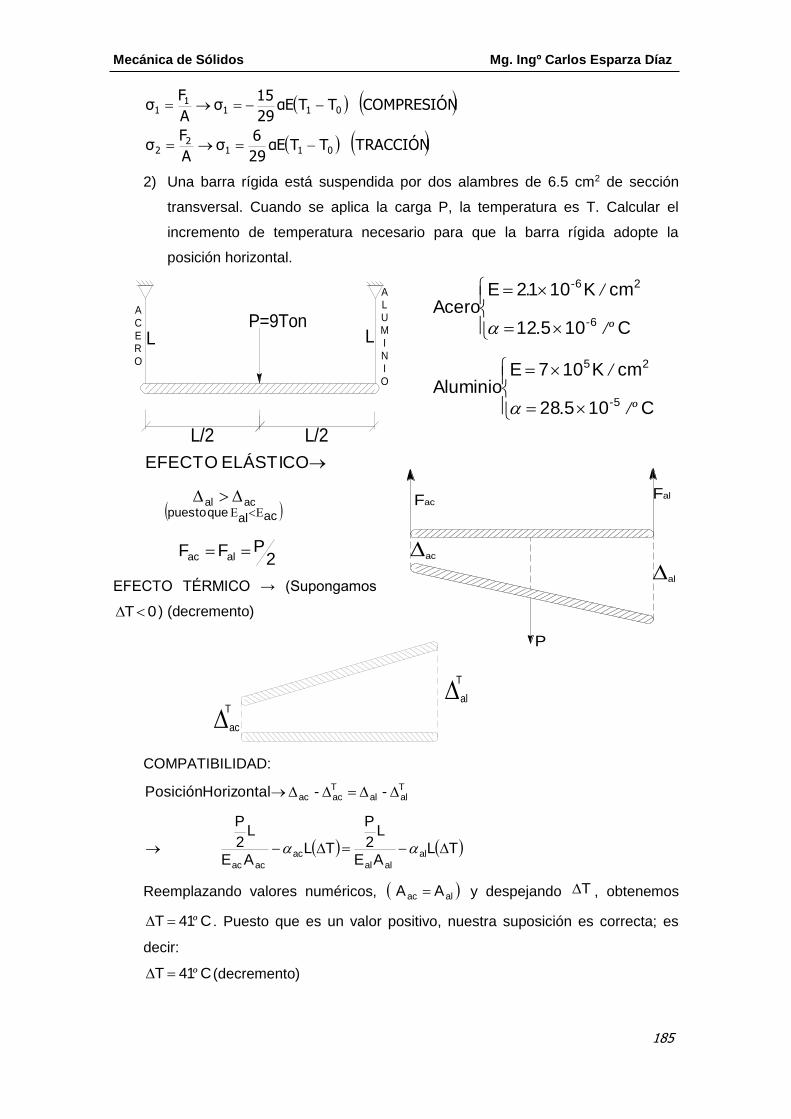
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
185
TRACCIÓN TTEα29
6σ
A
Fσ
COMPRESIÓN TTEα29
15σ
A
Fσ
0112
2
0111
1
2) Una barra rígida está suspendida por dos alambres de 6.5 cm2 de sección
transversal. Cuando se aplica la carga P, la temperatura es T. Calcular el
incremento de temperatura necesario para que la barra rígida adopte la
posición horizontal.
C10528
cmK107EAluminio
C10512
cmK101.2EAcero
5-
25
6-
26-
/º.
/
/º.
/
2PFF
ELÁSTICO EFECTO
alac
acal
acal que puesto
EFECTO TÉRMICO → (Supongamos
0T ) (decremento)
COMPATIBILIDAD:
TLAE
L2
P
TLAE
L2
P
- - Horizontal Posición
al
alal
ac
acac
Talal
Tacac
Reemplazando valores numéricos, alac AA y despejando T , obtenemos
C41T º . Puesto que es un valor positivo, nuestra suposición es correcta; es
decir:
C41T º (decremento)
A
CER
O
ALUMINI
O
P=9TonL L
L/2 L/2
P
FacFal
ac
al
ac
T
al
T
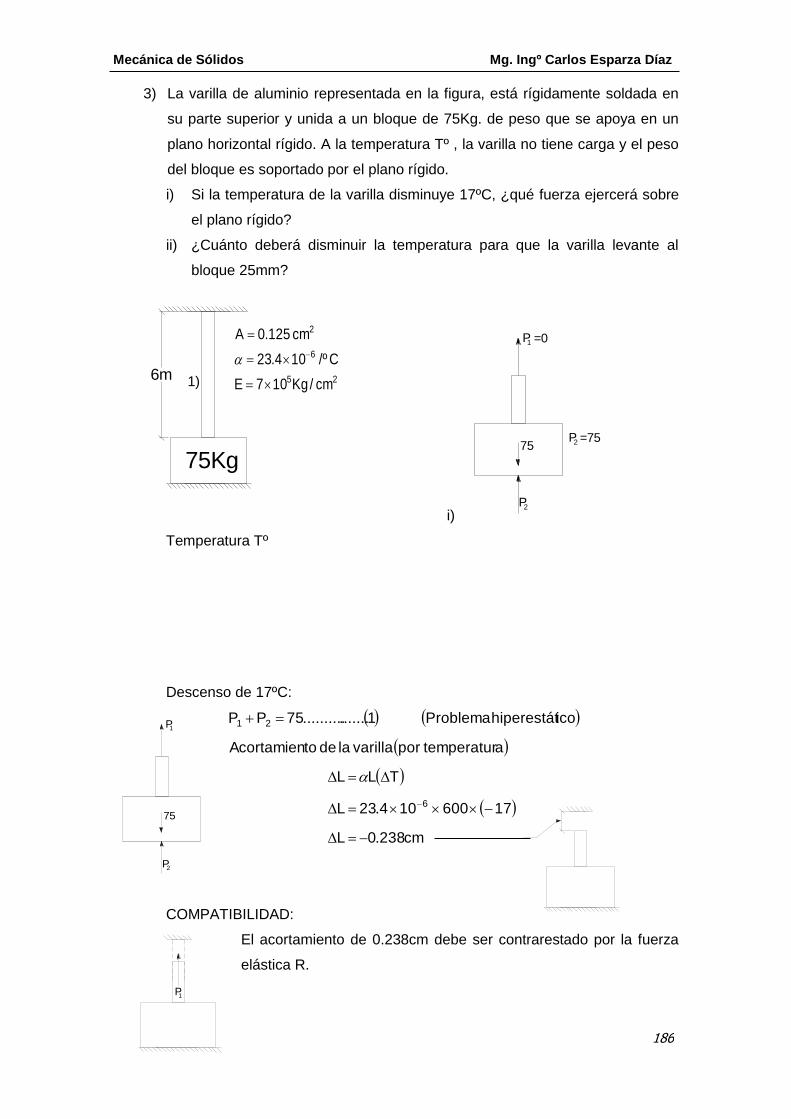
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
186
1)6m
75Kg
3) La varilla de aluminio representada en la figura, está rígidamente soldada en
su parte superior y unida a un bloque de 75Kg. de peso que se apoya en un
plano horizontal rígido. A la temperatura Tº , la varilla no tiene carga y el peso
del bloque es soportado por el plano rígido.
i) Si la temperatura de la varilla disminuye 17ºC, ¿qué fuerza ejercerá sobre
el plano rígido?
ii) ¿Cuánto deberá disminuir la temperatura para que la varilla levante al
bloque 25mm?
i)
Temperatura Tº
Descenso de 17ºC:
cm2380L
1760010423L
TLL
atemperatur por varilla la de toAcortamien
icohiperestát Problema 175PP
6
21
.
.
.................
COMPATIBILIDAD:
El acortamiento de 0.238cm debe ser contrarestado por la fuerza
elástica R.
P2
P1
75
=0
P2 =75
25
6
2
cm/Kg107E
C/º104.23
cm125.0A
P2
P1
75
P1
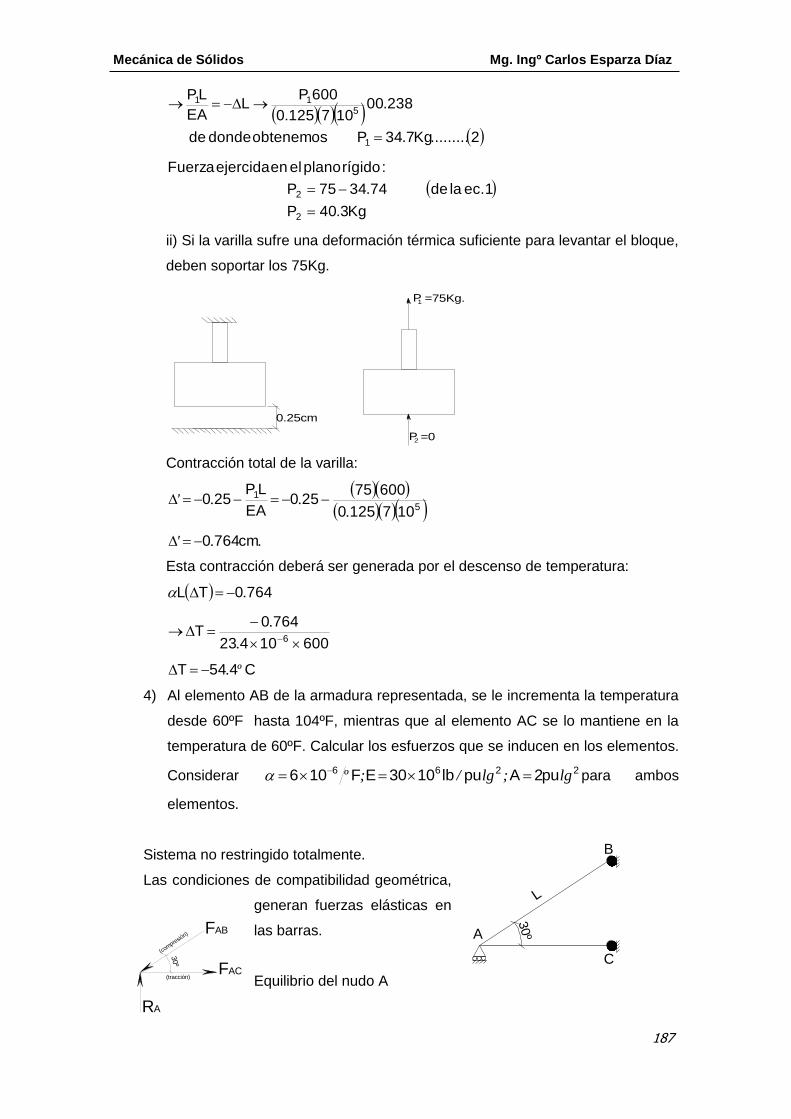
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
187
2.........Kg7.34P obtenemos donde de
238.00107125.0
600PL
EA
LP
1
511
Kg3.40P
1 ec. la de 74.3475P
:rígido plano el en ejercida Fuerza
2
2
ii) Si la varilla sufre una deformación térmica suficiente para levantar el bloque,
deben soportar los 75Kg.
Contracción total de la varilla:
..'
...'
cm7640
1071250
60075250
EA
LP250
5
1
Esta contracción deberá ser generada por el descenso de temperatura:
C454T
60010423
7640T
7640TL
6
º.
.
.
.
4) Al elemento AB de la armadura representada, se le incrementa la temperatura
desde 60ºF hasta 104ºF, mientras que al elemento AC se lo mantiene en la
temperatura de 60ºF. Calcular los esfuerzos que se inducen en los elementos.
Considerar 2266 pu2Apulb1030EF106 lg;lg/;º para ambos
elementos.
Sistema no restringido totalmente.
Las condiciones de compatibilidad geométrica,
generan fuerzas elásticas en
las barras.
Equilibrio del nudo A
0.25cm
P2
P1 =75Kg.
=0
30ºA
B
C
L
30º
(compre
sión)
(tracción)
FAB
FAC
RA

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
188
AA'
30º
30º
AC
AB
1F2
3F
F30F0F
ACAB
ACABHOR
.................
cos
Compatibilidad.
ATEMPERATUR
ELÁSTICO
ELÁSTICO
AB
AC
Condición:
22
330 ABACABAC ...............cos
Reemplazando los cambios de longitud, tenemos:
3
EA
LF60104L106
2
3
EA
23LF
AB6AC...............
Teniendo en cuenta la ec. 1, la ec.3 puede escribirse:
EA
LF44L106
EA
23L
23F
AB6AC
De donde obtenemos:
lb3683126F 1 ec. la Por
lb919602F
AC
AB
.
.
TRACCIÓN
2AC
COMPRESIÓN
2AB
pulglb1841582
3683126
pulglb4648012
919602 :Esfuerzos
..
..
5) Dos barras están sin esfuerzo y tienen longitudes de 12 y 10 pulg, según se
indica en el esquema. La barra (1) es de aluminio y la barra (2) es de acero.
Suponiendo que los apoyos son absolutamente rígidos, calcular el esfuerzo en
cada barra cuando la temperatura es 120ºF.(Temperatura inicial →30ºF)
22
22
pulgKlb30000E ; 4pulg A; 0.0000065 : Acero
pulgKlb10000E ; 2pulg A; 0.000013 :Aluminio
→ Se conciben las barras separadas y se calculan las
deformaciones térmicas, sin restricción.
1)
2)
10"
12"

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
189
"..
"..
007020901200000650
0117090100000130
TL
T2
T1
T
rígidos. apoyos los a ajustarse para
scomprimida ser deben dilatadas barras
las que total longitud la representa T
pulg.01872000702001170T2
T1
T ...
Aplicamos fuerzas P, iguales y opuestas, en las barras (dilatadas) para acortarlas
una longitud total T .
T
21
T21
EA
PL
EA
PL
R
e
e
m
p
Reemplazando datos:
018720300004
12P
100002
10P.
De donde encontramos: Klb 231P .
pulg
Klb87
4
231 ;
pulg
Klb615
2
231 Luego
2221 ..
..
6) Cuatro placas de aluminio de 0.75” están unidos por un remache de ¾ pulg. de diámetro, según se representa en el esquema. A la temperatura de 30ºF los materiales están apretados. Pero sin esfuerzo. Si la temperatura sube a 120ºF, calcular el esfuerzo en cada material.
24pulg Aluminiodel efectiva Area Dato
2
2
pulgKlb10000E0001330 Aluminio
pulgKlb30000E0000650 Acero
/;.
/;.
Las cuatro placas de aluminio son consideradas
como un solo miembro de 3” de espesor.
1)
2)
T
T
1
T
2
1)
2)
T
1
2
P
P
3"
3/4"
12 2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
190
Las deformaciones térmicas no restringidas, son:
"..
"..
00359090300001330
0101755090300000650
T2
T1
placas. las de final espesor al igual sea
remache del final longitud la que finalidad
la con deformados ser deben dilatados
miembros los que longitud la representa T
pulg. 0018350T1
T2
T .
Se aplican fuerzas iguales y opuestas para comprimir las placas y estirar el
remache:
Klb. 6.1P :obtenemos donde De
0018350100004
3P
300004420
3P
T21
..
compresión pulg
Klb521
4
.16 ; tracción
pulg
Klb813
4420
16
2221 ...
.
Nota> L1= L2 (finales)
".
..
"..
.
0013310000
352100359033L
00314330000
3813001755033L
2T22
1T11
7) Una barra compuesta se construye a partir de una varilla de acero de 25mm de diámetro exterior y 25mm de diámetro interior. La varilla y el tubo se unen mediante dos pernos de 20mm de diámetro, según se indica en el esquema. Determinar el esfuerzo cortante que se tiene en los pernos, si después de apretados se eleva la temperatura en 50ºC.
1)2)
1
2
T
T
1)2)
1
2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
191
C1017
PaG051ECOBRE
C1011
PaG210EACERO
6-
6-
/º
/º
Como accu , el cobre trata de dilatarse
más que el acero, determinándose esfuerzo
cortante en los pernos de unión de ambos materiales.
accuT
accuT
9
cu
cu
cucu
9
ac
ac
acac
cuac
223cu
3accobreacero
ααTΔLΔ
TΔLαTΔLαΔ
:LONGITUD DETOTAL CAMBIO
3............10105
LσL
E
σΔ
:COBREEL EN TOACORTAMIEN
2............10210
LσL
E
σΔ
:EL ACERO EN TOALARGAMIEN
1.........σ3σ ndoSimplifica
2550104
πσ1025
4
πσFF :CONDICIÓN
COMPATIBILIDAD:
9
cu
9
acaccu
cuacT
10105
L
10210
LTL
:Luego
3) y 2 ndo(Reemplaza
Simplificando y reemplazando valores:
9
cu
9
ac9
101051021010111750
Teniendo en cuenta la ec. (1):
99ac6
101053
1
10210
110650
MPa8337 :obtenemos donde de ac .
KN56718F
MN0185670833710254
F
A F : ACEROELSOPORTA QUEFUERZA
ac
23ac
acacac
.
..
25m
m
50m
m
L
COBRE
ACERO
d=20mm
T
cu acac
cu
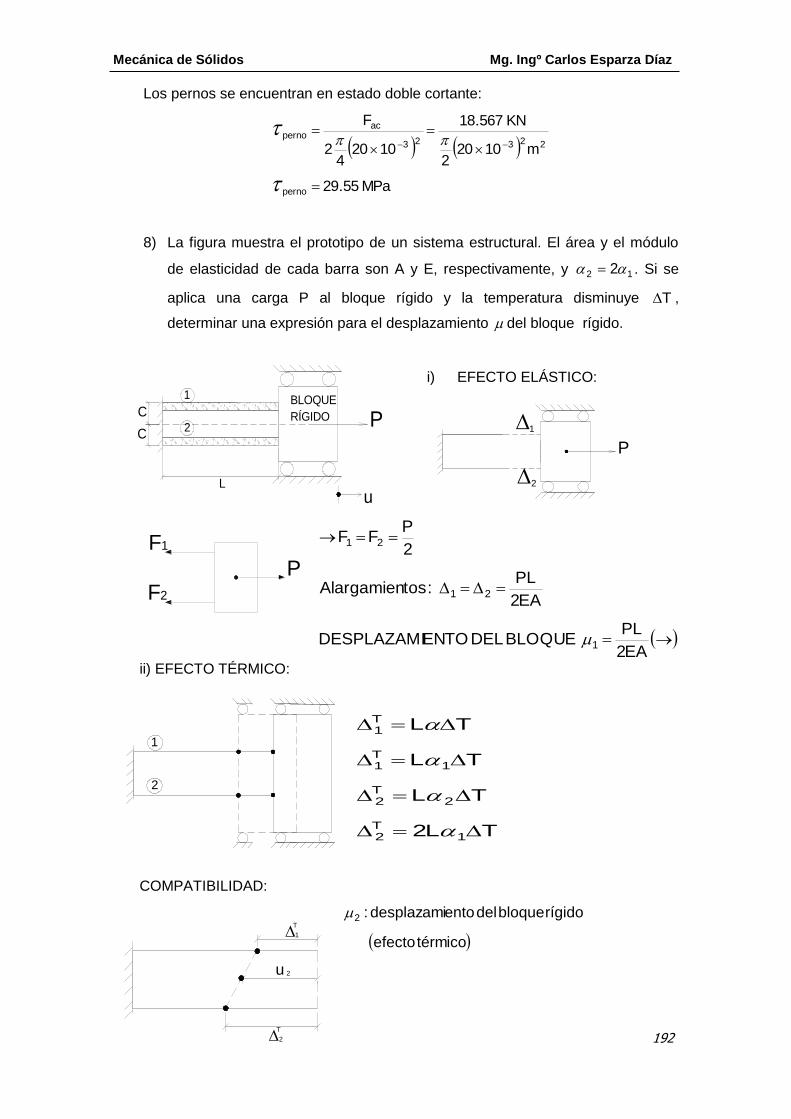
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
192
Los pernos se encuentran en estado doble cortante:
MPa5529
m10202
KN56718
10204
2
F
perno
22323
acperno
.
.
8) La figura muestra el prototipo de un sistema estructural. El área y el módulo
de elasticidad de cada barra son A y E, respectivamente, y 12 2 . Si se
aplica una carga P al bloque rígido y la temperatura disminuye T ,
determinar una expresión para el desplazamiento del bloque rígido.
i) EFECTO ELÁSTICO:
P
1
2
EA2
PL BLOQUE DEL ENTODESPLAZAMI
EA2
PL :tosAlargamien
2
PFF
1
21
21
ii) EFECTO TÉRMICO:
TL2
TL
TL
TL
1T2
2T2
1T1
T1
COMPATIBILIDAD:
térmico efecto
rígido bloque del entodesplazami :2
1
2 P
uL
BLOQUE
RÍGIDOC
C
P
F1
F2
1
2
T
1
T
2
u 2

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
193
TL2
3
2
TL2TL
2
12
112
T2
T1
2
Superposición:
Desplazamiento total del bloque: 21
0T
TL2
3
EA2
PL
TL2
3
EA2
PL
1
1
9) En el sistema representado: La barra AE es rígida. Se produce un incremento
de temperatura de 100ºF. Calcular las fuerzas en los elementos CF y DG.
F1056
pulg150A
pulgKlb103E
CG arraB
F1012
pulg10A
pulgKlb10E
CF Barra
6-
2
27
6-
2
27
/º.
.
/
/º
.
/
FUERZAS:
Suponemos que CF y DG están en tracción.
.........0F7F4
0M
DGCF
B
GEOMETRÍA:
Semejanza:
...........1074
DGCF
A B C D E
F
G6"
4"
5" 4" 3" 3"
B
FCF FDGRB
B CFDG
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
194
Material:
TLEA
LF
lL
TEA
FT
E
l
CFCF
CFCF
CFCFCF
tota
CFCFCF
CF
CFCF
CFCF
CF
tota
CF
de donde obtenemos: ...........CFCFCFCFCF
CF
CF EATLL
1F
De manera similar, obtenemos:
...........TEAL
EAF DGDGDGDG
DG
DGDGDG
Reemplazando y en :
..........0TEA
L
EA7TL
L
EA4 DGDGDGDG
DG
DGDGCFCFCF
CF
CFCF
De obtenemos CFDG4
7 . Reemplazamos en :
0TEA4
7
L
EA7TL
L
EA4 DGDGDGCF
DG
DGDGCFCFCF
CF
CFCF
De donde despejamos CF:
DG
DGDG
CF
CFCF
DGDGDGCFCFCFCF
L
AE
4
77
L
AE4
AE7AE4T
Reemplazando valores numéricos, obtenemos: pulg.10751 3CF
.
Con este valor y las ecuaciones , y , encontramos:
tracción lb 520F ; compresión lb 908F DGCF
10) En la gráfica se representa una placa delgada homogénea. Determinar el
tamaño y la forma finales de la placa, si
i) En toda la placa existe un incremento de temperatura T º.
ii) La placa se somete a un cambio de temperatura dado por T =Kx
iii) Cual será el valor de la deformación angular xz en el caso (i)
iv) Qué valor tendrá la deformación angular para el caso (ii) suponiendo que
al bordeo arista z permanezca fijo.

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
195
i) Si en toda la placa se produce un cambio uniforme de temperatura de T º,
en el caso de dilatación libre, la deformación lineal en cualquier dirección será
uniforme y de valor
T
El alargamiento en direcciones x,z será:
aTL
bTL
xxx
zzz
La placa seguirá teniendo forma
rectangular, con dimensiones:
T1aaTaL
T1bbTbL
x
z
ii) Si el cambio de temperatura es T =Kx, entonces en un punto (x,z) sobre la
placa, la deformación estará dad por Kx .
KxzxKxzzz
z
z
2
xKxKxxx
x
x :También
x
0
z
2x
0
X
Los puntos sobre el eje z NO SE
DESPLAZAN (tienen x=0).
0z0x ;
El punto A tiene coordenadas
2
ba; (antes de la deformación).
y
x
z
a
b/2
b/2
t 0
Coeficiente de dilatación
y
x
z
a(1+T)
b(1+T)
x
z
A
A'
x
z
zx
P
P'
forma final de la placa

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
196
Después de la deformación para a la posición
2
bKa
2
b
2
aKaA
2
,'
iii) Dilatación libre uniforme → La forma final de la placa es rectangular (no existe
variación de los ángulos rectos), luego 0xz en todo punto de la placa.
iv) En este caso, la distorsión (angular) máxima se presenta sobre los bordes
2bz / de la placa.
máxxz2
2
aK1
2Kb
2
aKa
2Kab
//
tan
1.18) Ecuaciones Diferenciales para Fuerza y Deformación Axiales
Si la carga axial se distribuye a lo largo de un elemento (barra) y si además
varía la sección transversal, pueden deducirse ecuaciones para la fuerza y el
desplazamiento como funciones de la posición a lo largo del miembro.
Consideremos un miembro que soporta una carga axial por unidad de longitud q(x) en
la dirección del eje centroidal. En los extremos pueden existir cargas aplicadas y/o
reacciones que mantengan al miembro en equilibrio.
Integrales para Medio Valordel Teorema
xxxxqxxq
xx
x
;
ESTÁTICA: 0xFxqxxF0FX )(
De donde
0
0x SI QUE NOTAR 0q
x
xFxxF
)(
Pasando al límite, cuando 0x , tenemos:
q(x)
x x
x
q(x)
F(x) F(x+x)
x
u(x)
x+x u(x+ x)

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
197
X distancia la a sección la
en actúa que interna Fuerza i..... 0q
x
xF
GEOMETRÍA:
La Deformación Unitaria del elemento de longitud x , es:
iix
u
0x cuando límite al Pasandox
xuxxu
x
xxuxxxuxx
x
x
x
..................
...
RELACIÓN FUERZA / DEFORMACIÓN
Si la barra es de material elástico-lineal y se presenta un cambio de temperatura T ,
tenemos:
iiiTAE
Fx
TOTALx ................
Reemplazando en la ec. (i):
iv0xqTAExx
uAE
x
0xqTAEx
uAE
x
..............
La ecuación (iv) relaciona la carga distribuida q(x) y el cambio de temperatura T en
la barra con el desplazamiento u(x) a lo largo del eje de la misma.
La solución de la ecuación diferencial (iv) contiene dos constantes arbitrarias de
integración, que podrán ser determinadas en base a las condiciones especificadas
para los desplazamientos en cada problema.
En el caso especial: T =0; A y E constantes; q(x)=0 → de la ec. (i) obtenemos
0x
F
, lo cual indica que la fuerza en la barra es constante (independiente de x).
La ec. (iv) nos da:

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
198
212
2
2
2
cxcxu0x
u0
x
uAE
donde c1 y c2 son las constantes de integración.
BB12
AB
AB1
2B1B2A1A
uxc c ; xx
uuc donde de
cxcu ; cxcu
En este caso, el desplazamiento en la barra es Lineal:
BB
AB
AB ux-x xx
uuxu
Si q(x) ≠0 → la fuerza interna F(x) será variable (función de x) a lo largo de la barra.
EJEMPLO
1) Un tubo AB de acero se coloca entre dos apoyos rígidos; según se indica en
la figura. Si el incremento de temperatura está dado por T =L
xTB , siendo
BT el incremento de temperatura en el extremo B. Determinar las reacciones
en A y en B y el desplazamiento a la mitad del tubo.
x
A B
XA XB
x
uA
uB
A' B'
uA uB
XA XB
u
(Diagrama de Desplazamientos)
A B
L
TB
Lx
T
Incremento de temperatura a lo largo de la barra

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
199
Usamos la ec.(iv), tenemos:
B2
2
B2
2
TLx
u
constante AESupuesto 0L
xT
xAE
x
uAE
Integrando 2 veces: 21
2
B cxc2
xT
Lxu
2c000u :sCondicione
B1
1
2
B
T2
c
Lc2
LT
L200 Lu
LxL
xT
2xu
xT22
xT
L2xu : tanto Por
B
B
2
B
Ecuación de desplazamiento a lo largo del tubo.
El desplazamiento en 2
Lx , es:
BB TLB
L2
L
L2
LT
22Lu
Por las ecs. (ii) y (iii) → TAEx
uAEF
RA RB
RA F
x
u
x=Lx=L/2
L/BT
RA= RB. Como no existe ninguna
otra fuerza externa, la fuerza F es
constante (la consideramos tracción)
q(x)=0

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
200
L
xTAE1
L
x2T
2AEF BB
Simplificando: xde nteindependie 2
TAEF B
Las reacciones en los apoyos, son:
2
TAEFRR ESCOMPRESION
B
equilibrio del scondicione
BA
1.19) Comportamiento Inelástico en Tracción
Un material ELASTOPLÁSTICO se caracteriza por un Diagrama Constitutivo de
la forma
El rango elástico (lineal) existe hasta el esfuerzo de fluencia y . Después de esto, la
conservación de una carga constante producirá una deformación ilimitada hasta el
punto de fractura.
SISTEMAS ESTÁTICAMENTE DETERMINADOS:
Una estructura estáticamente determinada, cargada axialmente, se deformará
elásticamente hasta que los esfuerzos en alguna parte alcanzan el límite de
fluencia. Las cargas adicionales producirán después grandes deflexiones,
dando por resultado la falla de la estructura.
EJEMPLO.
Una barra rígida horizontal está soportada por dos cables de acero cada uno de los
cuales tiene área transversal de 24 m106.1 .
Determinar
= 0.002
y
DEFORMACIÒN
ELÁSTICA
FLUJO
PLÁSTICO
ILIMITADO

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
201
i) La máxima carga P que puede aplicarse al centro de la barra, y la deflexión en
el instante de la falla.
ii) Trazar un diagrama Carga / Deflexión para esta estructura.
Considerar acero elastoplástico (E=200GPa; y =250MPa)
Debido a la simetría PA=PB
La carga P puede incrementarse hasta que la fuerza en cualquiera de los cables llegue
a ser la fuerza de fluencia:
PA= y A= (250x106)( 41061 . )
PA=40000 N (=PB)
.N80000PPP0F BAVERT
Para esta carga, el alargamiento de cualquiera de los cables, es
m1075.3
)10)(6.1)(10(200
)3)(40000(
EA
LP 3
49
A
Si las cargas se incrementaran, (esfuerzo más allá de y ), el cable fluirá y ocurrirá
una deformación ilimitada.
Para, este caso, el Diagrama P , es:
SISTEMAS ESTÁTICAMENTE INDETERMINADOS:
El procedimiento general para solucionar problemas hiperestáticos, usando la
teoría elástica lineal, se resume en:
3.75x10-3
P(NEW)
m)
3.0m
a
3.0m
aP
A BP
PA PB
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
202
(i) Ecuaciones de Equilibrio (Estática)
(ii) Relaciones de Compatibilidad (Geometría + material)
(iii) Solución simultánea de las ecuaciones (i) y (ii).
(Procedimiento usado cuando los esfuerzos se mantienen en el rango lineal elástico).
Cuando se reconoce que los esfuerzos en algunos miembros se extienden al rango
inelástico, la solución se simplifica debido a que la fuerza en cualquier miembro (cuyo
material es de comportamiento elastoplástico) tiene un valor constante AP yy .
Si esta fuerza es conocida, las incógnitas restantes pueden determinarse por métodos
estáticos.
La capacidad máxima de soportar carga de una estructura estáticamente determinada
se alcanza cuando cualquier miembro de apoyo ingresa al intervalo inelástico de
esfuerzos. Las estructuras estáticamente indeterminadas tienen capacidad adicional
de soportar cargas después de que un solo miembro de apoyo ingresa al régimen
plástico.
AP
última) (carga
Fluencia de carga :P
yy
y
i. Estructura Estáticamente Determinada
Pu
Py
P
FLUJO PLÁSTICO ILIMITADO
(TODA LA ESTRUCTURA EN REGÍMEN PLÁSTICO)
FLUJO PLÁSTICO RESTRINGIDO
(PARTE DE LA ESTRUCTURA EN REGÍMEN ELÁSTICO Y PARTE
EN RÉGIMEN PLÁSTICO)
DEFORMACIONES
ELÁSTICAS (TODA LA ESTRUCTURA EN REGÍMEN ELÁSTICO)
P
Py
DEFORMACIÓN ELÁSTICA
FLUJO PLÁSTICA ILIMITADO

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
203
a) Cuando ocurre la fluencia por primera vez en cualquier miembro de apoyo, la
carga de fluencia yP es también la carga última uP de la estructura.
b) Cuando ocurre fluencia por primera vez en cualquier miembro de apoyo, la
capacidad de carga es yP . Puede aplicarse carga adicional antes de que se
alcance la carga última uP y sucedan deformaciones irrestrictas. La región entre
yP y uP se designa Zona de Flujo o Plástico Restringido. En esta región, algunos
de los miembros de apoyo están forzados en la zona plástica, pero todavía
quedan suficientes apoyos comportándose elásticamente y, en consecuencia, la
estructura puede soportar cargas adicionales.
La capacidad de los materiales dúctiles puede ser aprovechada ventajosamente
sin provocar grandes desperdicios de material. Es decir, algunos esfuerzos
pueden analizarse en el rango plástico, ya que en ciertas ocasiones se puede
permitir que algún miembro de una estructura entre en fluencia sin que se afecte
la Estabilidad de la misma.
EJEMPLOS
1) La barra rígida ABC está soportada por tres alambres elastoplásticos
2y
2 pulgKlb36pulgKlb 30000E /;/ .Trazar el diagrama P – Δ para este
sistema. El área transversal de cada alambre es 12pulg .
D
e
b
e
m
o
Debemos encontrar la carga y la deflexión que ocurren cuando aparece por
primera vez la fluencia y, también, la carga y deflexión últimas.
Cuando la carga P se incrementa desde O, los alambres se esfuerzan dentro del
intervalo elástico. Esto continúa hasta que el alambre sometido al mayor esfuerzo
alcance su punto de fluencia.
Equilibrio:→
C
a
10"
a
10"
6"
B
P
A

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
204
........PPP2 :Luego
PPaPaP
PPPP
BA
CACA
CBA
Compatibilidad: (acción elástica)
Simetría total iguales alambresCA y CBA
P11
5P ; P
11
3P : obtenemos , y oResolviend
.......P3
5P
AE
6P
AE
10P
AE
LP
AE
LP :tanto Por
BA
AB
BB
B
AA
A
BB
BB
AA
AA
Acción Inelástica:
Como los alambres tienen la misma
sección transversal, el alambre que
pasa por B alcanzará primero el
Esfuerzo de Fluencia (puesto que
soporta mayor carga)
En el estado de fluencia
Según
.Klb6.21P
365
3PP
5
3P
A
ABA
Reemplazando en , obtenemos:
.Klb2.79366.212Py
(carga que usamos por primera vez la fluencia). La deflexión bajo esta carga, es
igual al alargamiento de cualquiera de los alambres.
0.0864" 10301
12636
AE
LP3
BB
BBBy
Después de que el alambre B ha fluido, soportará aún la carga constante
.Klb36Py .
Cuando la carga aplicada P se incrementa más allá de 79.2 Klb los alambres A y
C soportarán las cargas crecientes hasta que también alcances sus límites de
fluencia. En ese momento ocurre el flujo plástico ilimitado, alcanzándose la carga
última.
P
A
PCPBPA
B C
P
A
5P3P
B C
3P
PA PC
y=A=36Klb=PB
Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
205
.Klb108363636Pu
0.144" 10301
121036
AE
LP3
AA
AAau
Diagrama P - Δ (Δ: desplazamiento en dirección y sentido de la carga P).
PROBLEMAS
1) Dos tubos coaxiales, el interior (acero) tiene sección A = 10cm2 y el exterior
(aluminio) tiene sección A = 15cm2. Los tubos son comprimidos en sus
extremos mediante dos placas rígidas, según se indica en la gráfica. Trazar la
curva carga / Deflexión del conjunto, cuando se comprimen con una fuerza
axial P, de acuerdo con los diagramas constitutivos que se indican.
COMPATIBILIDAD:
79.2=Py
u=0.144y
P(KLb)
(pulg)
108=Pu
L=60 Cm
P
ALUMINIO
ACERO
0.0032
ALUMINIO
ACERO
0.005
6,000 K
Cm2
3,800 K
Cm2
Pu
36Klb=PB36Klb=PB 36Klb=PB
BA C

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
206
FUERZAS DE FLUENCIA:
Kg. 57000153800AF
Kg. 60000106000AF
alyylc
acyyac
al
ac
GEOMETRÍA:
Debido a la rigidez de las placas, ambos tubos se acortarán la misma cantidad.
.....................L
alac
DIAGRAMAS :
Existen tres intervalos de interés:
i) elástico régimen en tubos dos Los0032.00
alalalal
acacacac
EE
EE
Reemplazando valores:
25al
25ac
Kg/cm 106.7005.0
3800
Kg/cm 1075.180032.0
6000
ii) ellástico. régimen en aluminio de tubo y
plástico régimen en acero de tubo005.000032
Kg/cm 106.7005.0
38000E
Kg/cm 6000
25alalal
2yac ac
iii) plástico régimen en tubos dos Los005.0
Kg/cm 3800
Kg/cm 6000
2yal
2yac
al
ac
EQUILIBRIO: alalacac AAP
RÍGIDAS
COMPATIBILIDAD INICIAL
L=60 Cm
ac
Fac Fal
Falal
Fac
Fac
Fac
Fal
Fal
P

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
207
Con base a la ec. anterior pueden calcularse P1 y P2, valores de la carga axial
P, correspondientes a las deformaciones unitarias 0.0032 y 0.005,
respectivamente.
.Kg 00.117P
)15)(005.0)(10)(6.7()10)(6000(P
.Kg 480.96P
)15)(0032.0)(10)(6.7()10)(0032.0)(10)(75.18(P
1
52
1
551
Posteriormente las cargas adquieren valor constante:
.Kg117000P
)15)(3800()10)(6000(P
ALARGAMIENTOS
mc 3.0)60)(005.0(
mc 192.0)60)(0032.0(
2
1
Diagrama P - Δ
2) La barra rígida horizontal AB está soportada por tres alambres elastoplásticos
según se indica. Determinas la carga límite (PL) que produzca el colapso del
sistema.
33004iominAlu
46002Bronce
50001Acero
2cm/Kg/
yσ
2cmÁreaMaterial
117,000=P2
96,480=P1
P(Kg)
(cm)
P
A
50cm
40cm
B
ALUMINIOACEROBRONCE
50cm 100cm
PL
A B
FacFbrFal
FUERZAS MÁXIMAS

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
208
PL
A B
FacFbrFalEN FLUENCIA
.Kg 500015000F
.Kg 920024600F
.Kg 1320043300F
máxac
máxbr
máxal
Para que se produzca el colapso del sistema, NO es necesario que
simultáneamente fallen los tres alambres.
Existen dos posibilidades:
i) Alambres de bronce y acero en fluencia, antes que el alambre de aluminio.
(La barra AB tenderá a girar alrededor de A).
ii) Alambres de bronce y aluminio en fluencia, antes que el alambre de acero.
(La barra AB tenderá a girar alrededor de B)
.Kg38400P
P5.0)2)(500()2)(9200)(1(
0M i)
L
L
A
La fuerza en el alambre de aluminio se calculará por equilibrio:
.Kg24200F3840050009200F alal
Puesto que la máxima fuerza en el alambre de aluminio es sólo 13200Kg., no
es posible este resultado. Debemos analizar la segunda posibilidad. (Se
obtuvo máxalal FF ).
.Kg23733P
P5.1)1)(922()2)(13200(
0M ii)
L
L
B
La fuerza en el alambre de acero, es:
.Kg1333F23733920013200F acac
Se obtiene Kg5000FFmáxacac
Luego la carga limite, es PL = 23733 Kg.
3) Trazar el diagrama P – Δ para el sistema representado cuyas barras son de
acero elastoplástico.( 2y cm9A;GPa200E:MPa250 )
PL
A B
FacFbrFalEN FLUENCIA

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
209
Incrementando la carga P desde O, las barras se esfuerzan dentro del intervalo
elástico, hasta que la barra sometida al máximo esfuerzo alcance el valor del
esfuerzo de fluencia.
Equilibrio:
.......PFF62.1PF5
4F2
PFsenF2
1212
12
Compatibilidad:
......F5625.1F
5
4
EA
2F
EA
5.2F
sen
21
12
12
Resolviendo (*) y (**) obtenemos:
P316.0F ; P494.0F 21
Puesto que las barras tiene la misma acción transversal, La barra (1) es la que primeramente ingresa al régimen plástico. En ese instante:
KN144F De
KN225)109)(10250(AF
2
46y1
Reemplazando en (*):
KN4.455PP2251446.1 yy
Deflexión correspondiente:
m105.210910200
210225
EA
LF 3
49
311
y
2 m
3
44
3
P
21
3
P
F1F2
F3
P
21

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
210
Después que la barra (1) ha fluido, soportará carga constante KN225F1 .
Cuando la carga aplicada se eleva más allá de 455.5KN, las barras inclinadas soportarán carga creciente hasta alcanzar el calor de la carga de fluencia. En ese instante:
KN225)109)(10250(AF 46y2
y se alcanza el valor Pu:
ilimitado plástico flujo el ocurre KN585P
225)225(6.1P : En
u
u
m10906.35/4
10125.3sen Pero
m10125.310910200
5.210225ientecorrespond Deflexión
33
112
3
49
3
2
Con los valores calculados, se traza la curva P - Δ :
ÚLTIMAm10906.3
KN585P
FLUENCIAm105.2
KN4.455P
3u
u
3y
y
4) Dos alambres de acero elastoplásticos se usan para levantar un peso de 3Klb,
según se incida. El alambre AB tiene longitud inicial de 20’ y el alambre AC
tiene longitud inicial de 20.03’. Determinar la fuerza en cada alambre y su
respectivo alargamiento. Cada alambre tiene 0.05 pulg2de área transversal.
Cuando se levanta el peso, es el alambre AB el que soporta carga, hasta que su
alargamiento sea 0.03’. Luego, es peso levantado es existido por los dos
alambres.
= 0.0017
y=50
3Klb
A
B C
20' 20.03'
Pu
Py
P(KN)
(cm)y u

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
211
Deformación unitaria en AB: ,0015.020
03.0AB que es menor que la máxima
deformación elástica permitida en el material (εy).
.Klb20.2F
)05.0)(0015.0(0017.0
50AEAF
:es AB,alambre el en fuerza la ,0015.0 Para
AB
ABABABABAB
AB
Puesto que el peso a levantar es 3Klb → ambos alambres lo soportarán.
1......3FF Equilibrio ACAB
Existen tres posibilidades para la deformación:
a) Deformaciones elásticas en ambos alambres.
b) AB en régimen plástico y AC en régimen elástico
c) Deformaciones plásticas en ambos alambres.
a) Deformaciones elásticas en ambos alambres:
Condición de compatibilidad: 2.........03.0 ACAB
0017.0
5005.0
1203.20F 1203.0
0017.0
5005.0
1220F ACAB
Simplificando, obtenemos: 3..........F03.2012.44F20 ACAB
Resolviendo las ecs. (1) y (3): Klb397.0F ; Klb603.2F ACAB .
Calculamos 22AB
pulg
Klb.06.52
pulg05.0
Klb603.2 , que resulta mayor que el esfuerzo de
fluencia 2y
pulg
Klb50
En consecuencia, el alambre AB ingresa al régimen plástico.
Soporta una carga máxima de Klb5.2)05.0(52AF yAB
Con este, la fuerza en el alambre AC es: (1) equilibrio de ec. la de Klb5.0FAC
El alambre AC permanece en el régimen elástico, 05.0
5.0AC
2y
2AC pulgKlb50pulgKlb10
La deformación unitaria correspondiente, será:
FAB FAC
3Klb

Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz
212
00034.0
0017.0
50
10
EAC
ACAC
El alargamiento del alambre AC, es: 03.2000034.0AC
pies0068.0ΔAC
Mediante la ecuación (2), encontramos pies03681.0ΔAB
:es BARRA),
LA DE SUPERIOR MITADLA EN esfuerzo( El
P Sólo ii)
"2977.0)"86)(003492.0(ΔLεΔ :es barra)
la de entodesplazami al lbarra(igua la de toalargamien El
003492.0ε obtenemosec.(i); la en doReemplazan
lgpu/lb3200075.0
24000
A
Pσ
P Sólo i)
2
B1B
1
211
1