
Reporte de Microcontrolador
26
1 Universidad Politécnica de Chiapas Ingeniería Mecatrónica Materia: Microcontroladores. Profesor(a): Mario Wenso Morales Coutiño. Integrantes: Virginia Iris Gallegos Hernández. Esteban Mauricio Martínez Abarca. Ana Nelva Morales Vázquez. Oscar Ortiz Pérez. Proyecto Final: Carro seguidor de sonido. Grado: 5° Grupo: A Fecha: 28 de abril de 2014.
-
Upload
oscar-ortiz-perez -
Category
Documents
-
view
30 -
download
2
description
REPORTE MICROCONTROLADORES
Transcript of Reporte de Microcontrolador

1
Universidad Politécnica de
Chiapas
Ingeniería Mecatrónica
Materia: Microcontroladores.
Profesor(a): Mario Wenso Morales Coutiño.
Integrantes:
Virginia Iris Gallegos Hernández.
Esteban Mauricio Martínez Abarca.
Ana Nelva Morales Vázquez.
Oscar Ortiz Pérez.
Proyecto Final: Carro seguidor de sonido.
Grado: 5° Grupo: A
Fecha: 28 de abril de 2014.
2
Contenido
Resumen Ejecutivo .......................................................................................................................... 3
Introducción ....................................................................................................................................... 3
Objetivos Generales ......................................................................................................................... 3
Objetivos Específicos ....................................................................................................................... 4
Justificación ....................................................................................................................................... 4
PIC 16F877A. ................................................................................................................................ 5
Mikro C. .......................................................................................................................................... 7
Micrófono (Electret). ..................................................................................................................... 9
LM555. ......................................................................................................................................... 12
Resistencia. ................................................................................................................................. 15
Capacitores. ................................................................................................................................ 15
Transistor 2N2222. ..................................................................................................................... 17
Sensor de Efecto Hall. ............................................................................................................... 19
Motor CD...................................................................................................................................... 21
Pantalla LCD. .............................................................................................................................. 22
Desarrollo......................................................................................................................................... 23
Resultados ....................................................................................................................................... 24
Conclusión ....................................................................................................................................... 26
Bibliografía ....................................................................................................................................... 26
3
Resumen Ejecutivo En este proyecto lo que se realizó fue el control de un sistema de seguidor de sonido
usando un PIC (específicamente el 16F877A) con el cual se realiza la medición de
una señal acústica, y el sistema es capaz de tomar decisiones mediante rutinas
previamente programadas y son accionados dos motoreductores según las
necesidades y una técnica desarrollada para lograr el movimiento de un carro y su
giro para la derecha o la izquierda según sea detectada la señal acústica, también
es capaz de esquivar obstáculos utilizando un sensor ultrasónico que está colocado
enfrente del carrito que funge como el sistema. Dentro del mismo se agregó un
sensor de efecto Hall que tiene la función de medir los RPM y con ello determinar la
velocidad del vehículo así como la distancia que ha recorrido, estos resultados son
mostrados en una pantalla LCD que también está colocado en el sistema.
Introducción
En el siguiente reporte se darán a conocer los resultados del proyecto final realizado
como parte de la materia de microcontroladores. En este proyecto se realizó a groso
modo un carro seguidor que es capaz de captar el sonido mediante la detección de
señal por medio de un dispositivo electrónico que mide la variación de la onda
sonora, con esta señal, el sistema es capaz de tomar decisiones con rutinas
previamente programadas utilizando un PIC 16F877A y Mikro C como plataforma
de programación de PIC´s, adicionalmente se le agregaron otras acciones al
proyecto tales como la medición de obstáculos utilizando un sensor ultrasónico, que
también realiza una rutina para esquivar, que previamente fue programada, cabe
agregar que al sistema se le añadió un pequeño tacómetro utilizando un sensor de
efecto hall que mostrara los RPM y la distancia recorrida por el vehículo en una
LCD. Como preámbulo cabe agregar también que se mostrará el desarrollo del
proyecto, y los pasos que se siguieron para que se lograra el funcionamiento óptimo
del sistema mediante la utilización de un microcontrolador.
Objetivos Generales
Comprender los microcontroladores como dispositivos de control de sistemas
con características específicas.
Lograr realizar un sistema con el uso de un microcontrolador y comprender
su funcionamiento.
Adaptar entradas y salidas de dispositivos analógicos como digitales al
microcontrolador y programar rutinas que definan y distingan nuestro sistema
con el de otros, para aplicar lo aprendido en el curso.
4
Objetivos Específicos
Aprender mediante el software de Mikro C, tipos especiales de casos de programación para la realización de rutinas que ejecuten una acción predeterminada al percibir alguna variación o distorsión del medio ambiente que será captada por medio de sensores conectados al microcontrolador y que ejecutarán acciones por medio de actuadores instalados de la misma manera en el microcontrolador.
Definir y variar técnicas de programación para la ejecución óptima de rutinas deseadas para el funcionamiento del sistema.
Aplicar y combinar aprendizajes adquiridos de otras materias con la materia de microcontroladores para lograr un concreto conocimiento acerca del funcionamiento de diversos sistemas que funcionan en la vida real.
Justificación
El estudiante de Ingeniería Mecatrónica está inmerso en el desarrollo de proyectos
que necesitan de un previo conocimiento para conocer de manera muy aproximada
su comportamiento en el medio físico en el que nos encontramos, para ello, existen
herramientas computacionales y electrónicas que nos ayudan a conocer y
determinar de manera muy cercana a la realidad, el comportamiento de diversos
sistemas en el medio físico, para realizar esto, el estudiante deberá tener
conocimientos de microcontroladores, así como también del acondicionamiento de
señal y el uso efectivo de circuitos y dispositivos electrónicos, cabe agregar, que
también se deben tener conocimientos acerca del software Mikro C, en donde
podemos realizar programación mediante la configuración lógica de lo que se quiere
realizar. Con ello, el estudiante de Mecatrónica, tendrá las herramientas necesarias
para realizar el funcionamiento de algún sistema y adaptarlo a sus necesidades.
Marco Teórico.
5
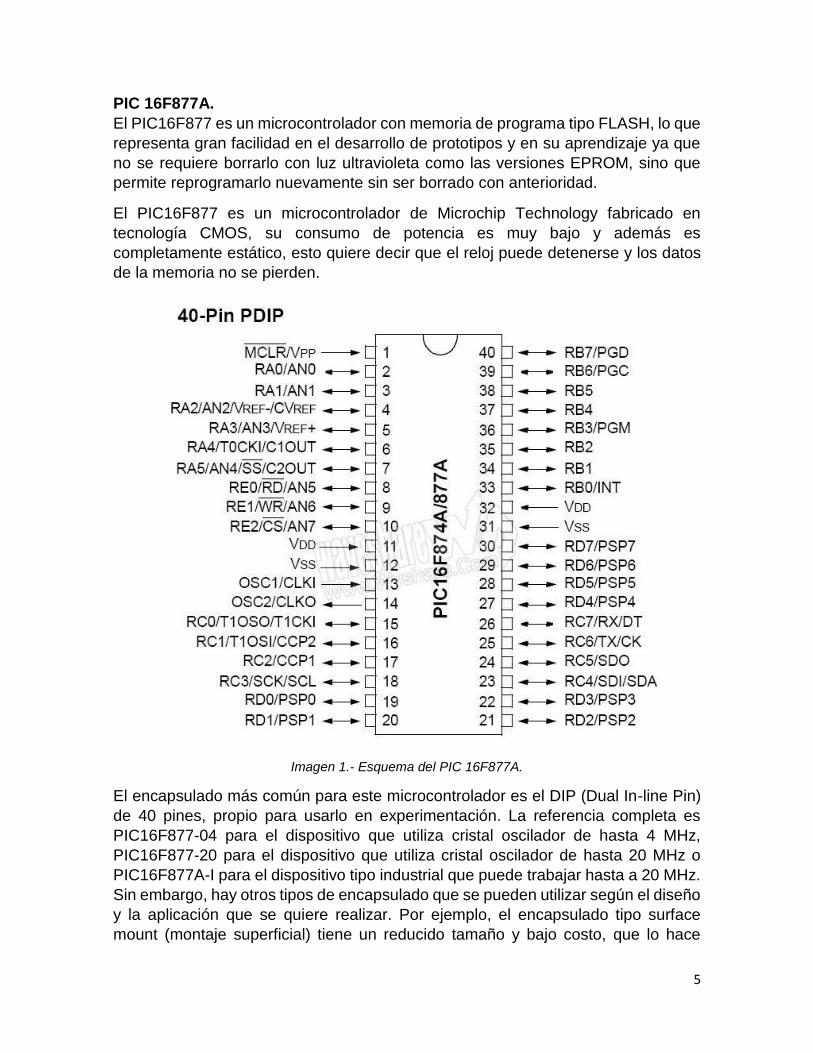
PIC 16F877A.
El PIC16F877 es un microcontrolador con memoria de programa tipo FLASH, lo que
representa gran facilidad en el desarrollo de prototipos y en su aprendizaje ya que
no se requiere borrarlo con luz ultravioleta como las versiones EPROM, sino que
permite reprogramarlo nuevamente sin ser borrado con anterioridad.
El PIC16F877 es un microcontrolador de Microchip Technology fabricado en
tecnología CMOS, su consumo de potencia es muy bajo y además es
completamente estático, esto quiere decir que el reloj puede detenerse y los datos
de la memoria no se pierden.
Imagen 1.- Esquema del PIC 16F877A.
El encapsulado más común para este microcontrolador es el DIP (Dual In-line Pin)
de 40 pines, propio para usarlo en experimentación. La referencia completa es
PIC16F877-04 para el dispositivo que utiliza cristal oscilador de hasta 4 MHz,
PIC16F877-20 para el dispositivo que utiliza cristal oscilador de hasta 20 MHz o
PIC16F877A-I para el dispositivo tipo industrial que puede trabajar hasta a 20 MHz.
Sin embargo, hay otros tipos de encapsulado que se pueden utilizar según el diseño
y la aplicación que se quiere realizar. Por ejemplo, el encapsulado tipo surface
mount (montaje superficial) tiene un reducido tamaño y bajo costo, que lo hace
6
propio para producciones en serie o para utilizarlo en lugares de espacio muy
reducido.
Los pines de entrada/salida de este microcontrolador están organizados en cinco
puertos, el puerto A con 6 líneas, el puerto B con 8 líneas, el puerto C con 8 líneas,
el puerto D con 8 líneas y el puerto E con 3 líneas. Cada pin de esos puertos se
puede configurar como entrada o como salida independiente programando un par
de registros diseñados para tal fin. En ese registro un bit en "0" configura el pin del
puerto correspondiente como salida y un bit en "1" lo configura como entrada.
Dichos pines del microcontrolador también pueden cumplir otras funciones
especiales, siempre y cuando se configuren para ello, según se verá más adelante.
Los pines del puerto A y del puerto E pueden trabajar como entradas para el
convertidor Análogo a Digital interno, es decir, allí se podría conectar una señal
proveniente de un sensor o de un circuito analógico para que el microcontrolador la
convierta en su equivalente digital y pueda realizar algún proceso de control o de
instrumentación digital. El pin RB0/INT se puede configurar por software para que
funcione como interrupción externa, para configurarlo se utilizan unos bits de los
registros que controlan las interrupciones.
El pin RA4/TOCKI del puerto A puede ser configurado como un pin de entrada/salida
o como entrada del temporizador/contador. Cuando este pin se programa como
entrada digital, funciona como un disparador de Schmitt (Schmitt trigger), puede
reconocer señales un poco distorsionadas y llevarlas a niveles lógicos (cero y cinco
voltios). Cuando se usa como salida digital se comporta como colector abierto (open
collector), por lo tanto, se debe poner una resistencia de pull-up (resistencia externa
conectada a un nivel de cinco voltios). Como salida, la lógica es inversa: un "0"
escrito al pin del puerto entrega en el pin un "1" lógico. Además, como salida no
puede manejar cargas como fuente, sólo en el modo sumidero.
El puerto E puede controlar la conexión en modo microprocesador con otros
dispositivos utilizando las líneas RD (read), WR (write) y CS (chip select). En este
modo el puerto D funciona como un bus de datos de 8 bits (pines PSP).
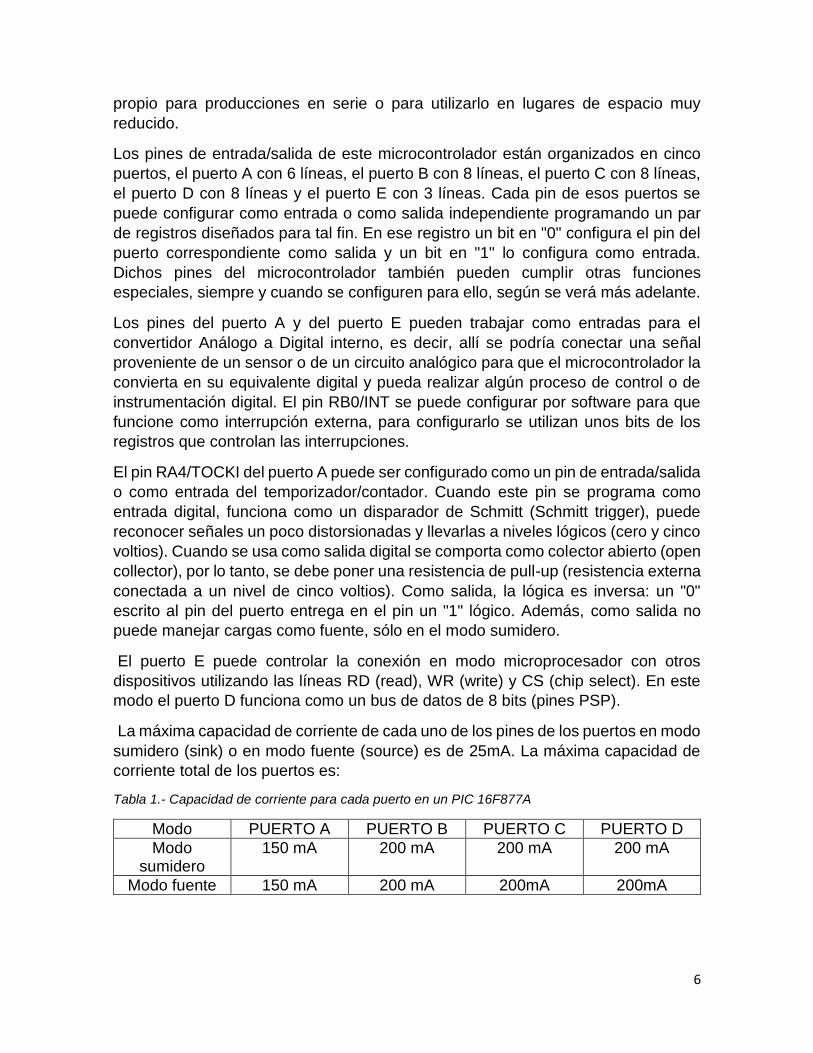
La máxima capacidad de corriente de cada uno de los pines de los puertos en modo
sumidero (sink) o en modo fuente (source) es de 25mA. La máxima capacidad de
corriente total de los puertos es:
Tabla 1.- Capacidad de corriente para cada puerto en un PIC 16F877A
Modo PUERTO A PUERTO B PUERTO C PUERTO D
Modo sumidero
150 mA 200 mA 200 mA 200 mA
Modo fuente 150 mA 200 mA 200mA 200mA
7
El consumo de corriente del microcontrolador para su funcionamiento depende del
voltaje de operación, la frecuencia y de las cargas que tengan sus pines. Para un
oscilador de 4 MHz el consumo es de aproximadamente 2 mA; aunque este se
puede reducir a 40 microamperios cuando se está en el modo sleep (en este modo
el micro se detiene y disminuye el consumo de potencia). Se sale de ese estado
cuando se produce alguna condición especial que veremos más adelante.
Mikro C. Estructura básica de un programa en Mikro C PRO.
Todos los programas (código fuente) de microcontroladores PIC en C tienen una
estructura básica, a partir de la cual se desarrolla cualquier aplicación del usuario.
Los 7 elementos básicos de la programación de PIC en C
La programación de PIC en C se puede comprender mejor si se estudian sus
elementos básicos; una vez que se dominen estos elementos se podrá dar solución
a la gran mayoría de problemas de programación. El propósito de la mayoría de los
programas es resolver un problema. Los programas resuelven los problemas por
medio de la manipulación de información o datos. Normalmente los programas se
caracterizan por permitir el ingreso de información, tener uno o varios lugares de
almacenamiento de dicha información, contar con las instrucciones para manipular
estos datos y obtener algún resultado del programa que sea útil para el usuario.
También, las instrucciones se pueden organizar de tal forma que algunas de ellas
se ejecuten sólo cuando una condición específica (o conjunto de condiciones) sea
verdadera, otras instrucciones se repitan un cierto número de veces y otras pueden
ser agrupadas en bloques que se ejecutan en diferentes partes de un programa.
Lo anterior constituye una breve descripción de los siete elementos básicos de la
programación: entrada de datos, tipos de datos, operaciones, salida, ejecución
condicional, lazos y funciones. Una vez que se dominan estos elementos se puede
afirmar que se conocen los fundamentos de la programación, con lo cual ya es
posible desarrollar una gran cantidad de aplicaciones de diversa índole.
Instrucciones básicas de PIC en C
1.- Instrucción de asignación (=)
Permite asignar a una variable un valor constante, el contenido de otra variable o el
resultado de una expresión matemática. La asignación va de derecha a izquierda.
Por ejemplo,
Suma=0; //El valor 0 se almacena en la variable suma.
8
X0=x1; //El contenido de la variable x1 se almacena en la variable x0.
Dx= (b-a)/n; //El resultado de la expresión matemática se almacena en la variable
dx.
2.- Instrucción de entrada de datos (variable=PORTx)
Permite el ingreso de uno o más datos a través de los pines del microcontrolador y
almacenarlos en una o más variables. Por ejemplo,
Variable=PORTA; //Los bits del puerto A se almacenan en la variable.
El siguiente es un caso especial utilizado en la programación de microcontroladores
PIC en C:
PORTB=PORTA; //Los bits del puerto A se envían hacia los pines del puerto B.
También se puede leer el estado individual de cada bit de un puerto:
Variable=RB3_bit; //Lee el estado del pin RB3 y lo guarda en la variable.
3.- Instrucción de salida de datos (PORTx=dato)
Permite el envío de datos, el contenido de una variable o el resultado de una
expresión matemática hacia los pines de un puerto. Por ejemplo,
PORTA=0x00; //Todos los pines del puerto A se ponen en 0.
PORTB=variable; Los bits de la variable son enviados hacia los pines del puerto B.
PORTB=PORTA+65; //El valor del puerto A más 65 se envía hacia el puerto B.
Como caso especial, se pueden enviar bits individuales a cada uno de los pines de
un puerto:
RB0_bit=0; //El pin RB0 se pone en 0.
4.- Instrucción de decisión (if...else)
Permite la ejecución de las instrucciones1 si la condición es verdadera, de lo
contrario se ejecutan las instrucciones2. Las llaves { } no son necesarias cuando
hay una sola instrucción.
If (condición) {
instrucciones1;
}
Else {
instrucciones2;
}

9
5.- Instrucción de ciclo controlado por una variable (for)
Permite ejecutar un grupo de instrucciones de manera repetitiva, una determinada
cantidad de veces.
For (número de veces) {
Instrucciones;
}
6.- Instrucción iterativa condicional (while)
Permite ejecutar un grupo de instrucciones de manera repetitiva, mientras una
condición sea verdadera. Primero se revisa la condición para determinar su valor de
verdad (verdadero o falso) y luego se ejecutan las instrucciones.
While (condición) {
Instrucciones;
}
7.- Instrucción hacer-mientras (do...while)
Permite ejecutar un grupo de instrucciones de manera repetitiva, mientras una
condición sea verdadera. Es similar a la instrucción while, con la diferencia de que
primero se ejecutan las instrucciones y luego se revisa la condición.
Do {
Instrucciones;
}
While (condición);
Micrófono (Electret).
Cuando decimos el micro adecuado, igual que la chispa adecuada, debemos pensar
que, de la amplia variedad disponible, conviene usar el que mejor se ajuste a lo que
queremos captar. Un micro piezoeléctrico por ejemplo no nos servirá para la voz,
pero será nuestra única opción para grabar ultrasonidos. Un micro de carbón
responde justo en las frecuencias de la voz, sin embargo su sensibilidad es pobre.
Uno de condensador es mejor, pero necesitamos un voltaje extra y un circuito
complicado para que funcione.
10
Imagen 2.- Vista real de un Electret.
Lo bueno del micrófono Electret es que tiene las ventajas del de condensador, y la
electrónica requerida es muy básica.
Ventajas:
Para empezar es barato y fácil de encontrar.
Buena respuesta en frecuencia en todo el rango audible (casi plana en
algunos modelos).
Está preamplificado internamente luego entrega una señal bastante alta en
comparación.
Es resistente.
Se alimenta con una tensión de entre 2 y 12V, fácilmente disponible.
Poco ruidoso.
Muy sensible.
Inconvenientes:
Saturación a alto volumen. El preamplificador interior se satura cuando recibe
una presión sonora alta, por ejemplo si hablamos cerca. Cosa que con otros
micrófonos no es tan fácil que pase. Este inconveniente lo solucionaremos
con una modificación más adelante.
Baja respuesta en tonos altos. Esto lo hace inservible para ultrasonidos -al
menos las cápsulas habituales-. A veces esto también una ventaja, porque
al no captar esas interferencias inaudibles no necesitamos tampoco filtrarlas.
Direccionalidad
11
Cuanto más ángulo abarca la recepción más señales captaremos y también más
ruido. Si queremos captar una señal concreta y no otras lo mejor es usar un micro
direccional. De lo contrario si la señal es débil puede perderse entre el ruido
ambiente. Convertir de forma casera un micro omnidireccional en otro direccional
es fácil. Claro que no obtendremos los mismos resultados con uno comercial.
Hay dos maneras:
Blindando todas las direcciones salvo la que nos interesa. Es decir metiendo el
micro dentro de un tubo. Impedimos que el sonido entre por los laterales y por
detrás. Mientras más largo y ancho más potencia sonora captaremos de la dirección
en la que apunte. Por la geometría del tubo se producen ecos y resonancias en
determinadas frecuencias. No deseamos eso, para evitarlo en lo posible se hacen
unos cortes o estrías transversales. Para no captar el soplido del viento se recubre
con esponja la entrada del tubo así como parte del interior.
Añadiendo un reflector. Si ponemos una pantalla por detrás evitamos captar lo que
haya a la espalda a la vez que reflejamos lo que provenga del frente y mejoramos
su recepción. Habitualmente se usa un reflector que además concentre todo lo
reflejado en un punto. Tal propiedad es típica de las parábolas. Al igual que con el
tubo, mientras mayor sea el diámetro del reflector, y por tanto su área, mayor
intensidad sonora vamos a captar.
Como siempre dependerá de lo que necesitemos en cada momento. Pero por dar
unas cuantas ideas:
Un tubo de cartón. Es lo mejor para captar una señal que se produce relativamente
cerca pero en un ambiente ruidoso.
Un paraguas. Perfecto para espacios abiertos, para registrar trinos de pájaros desde
lejos sin alterarlos, por ejemplo o también conversaciones lejanas. Incómodo y poco
discreto por otro lado. En esta web explican cómo fabricar uno.
La tapa de un cubo de basura. Versión más portátil que el paraguas. También da
buenos resultados pero en este caso tendremos que poner nosotros el eje para
sujetar el micro.
Un embudo. La típica trompetilla que sustituye al audífono. Da buen resultado en
distancias cortas.
Una botella. Mi opción favorita, una botella de plástico sin fondo. Combina lo mejor
del receptor parabólico con la direccionalidad del tubo. Sencilla de construir y de
llevar. Sin embargo es muy fácil captar ruidos del mismo plástico. En esta web
utilizan como reflector el de un flexo.
12
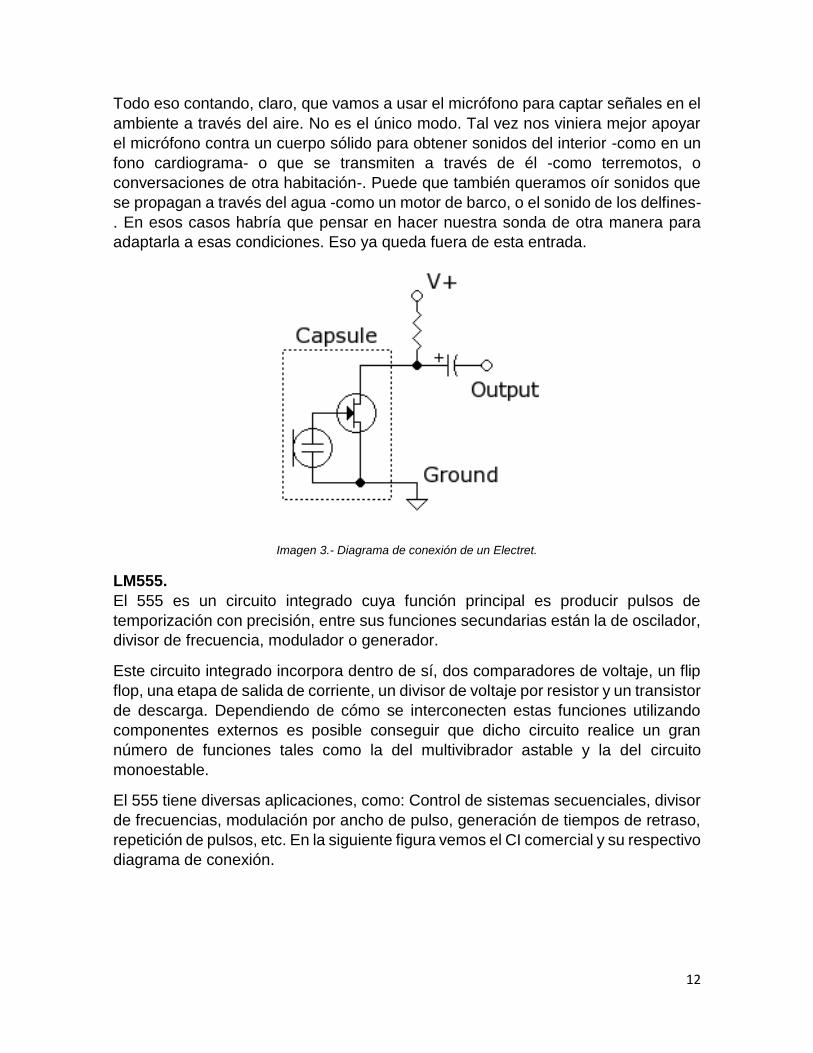
Todo eso contando, claro, que vamos a usar el micrófono para captar señales en el
ambiente a través del aire. No es el único modo. Tal vez nos viniera mejor apoyar
el micrófono contra un cuerpo sólido para obtener sonidos del interior -como en un
fono cardiograma- o que se transmiten a través de él -como terremotos, o
conversaciones de otra habitación-. Puede que también queramos oír sonidos que
se propagan a través del agua -como un motor de barco, o el sonido de los delfines-
. En esos casos habría que pensar en hacer nuestra sonda de otra manera para
adaptarla a esas condiciones. Eso ya queda fuera de esta entrada.
Imagen 3.- Diagrama de conexión de un Electret.
LM555.
El 555 es un circuito integrado cuya función principal es producir pulsos de
temporización con precisión, entre sus funciones secundarias están la de oscilador,
divisor de frecuencia, modulador o generador.
Este circuito integrado incorpora dentro de sí, dos comparadores de voltaje, un flip
flop, una etapa de salida de corriente, un divisor de voltaje por resistor y un transistor
de descarga. Dependiendo de cómo se interconecten estas funciones utilizando
componentes externos es posible conseguir que dicho circuito realice un gran
número de funciones tales como la del multivibrador astable y la del circuito
monoestable.
El 555 tiene diversas aplicaciones, como: Control de sistemas secuenciales, divisor
de frecuencias, modulación por ancho de pulso, generación de tiempos de retraso,
repetición de pulsos, etc. En la siguiente figura vemos el CI comercial y su respectivo
diagrama de conexión.
13
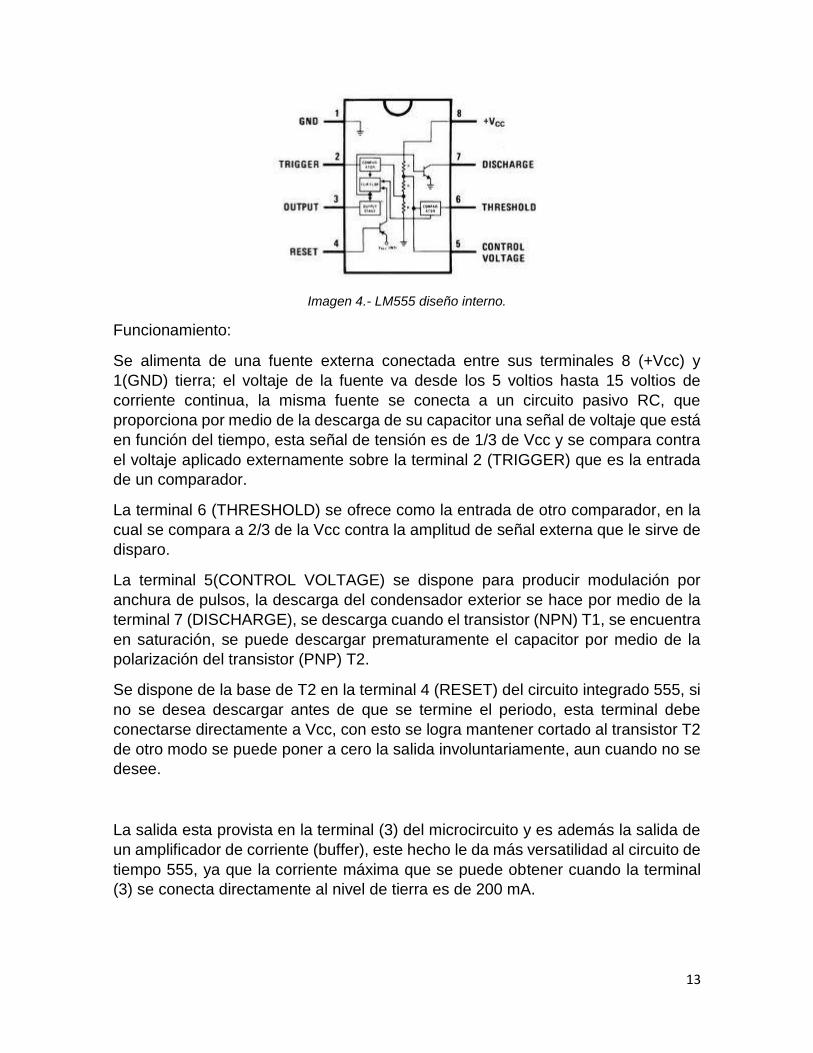
Imagen 4.- LM555 diseño interno.
Funcionamiento:
Se alimenta de una fuente externa conectada entre sus terminales 8 (+Vcc) y
1(GND) tierra; el voltaje de la fuente va desde los 5 voltios hasta 15 voltios de
corriente continua, la misma fuente se conecta a un circuito pasivo RC, que
proporciona por medio de la descarga de su capacitor una señal de voltaje que está
en función del tiempo, esta señal de tensión es de 1/3 de Vcc y se compara contra
el voltaje aplicado externamente sobre la terminal 2 (TRIGGER) que es la entrada
de un comparador.
La terminal 6 (THRESHOLD) se ofrece como la entrada de otro comparador, en la
cual se compara a 2/3 de la Vcc contra la amplitud de señal externa que le sirve de
disparo.
La terminal 5(CONTROL VOLTAGE) se dispone para producir modulación por
anchura de pulsos, la descarga del condensador exterior se hace por medio de la
terminal 7 (DISCHARGE), se descarga cuando el transistor (NPN) T1, se encuentra
en saturación, se puede descargar prematuramente el capacitor por medio de la
polarización del transistor (PNP) T2.
Se dispone de la base de T2 en la terminal 4 (RESET) del circuito integrado 555, si
no se desea descargar antes de que se termine el periodo, esta terminal debe
conectarse directamente a Vcc, con esto se logra mantener cortado al transistor T2
de otro modo se puede poner a cero la salida involuntariamente, aun cuando no se
desee.
La salida esta provista en la terminal (3) del microcircuito y es además la salida de
un amplificador de corriente (buffer), este hecho le da más versatilidad al circuito de
tiempo 555, ya que la corriente máxima que se puede obtener cuando la terminal
(3) se conecta directamente al nivel de tierra es de 200 mA.
14
La salida del comparador "A" y la salida del comparador "B" están conectadas al
Reset y Set del FF tipo SR respectivamente, la salida del FF-SR actúa como señal
de entrada para el amplificador de corriente (Buffer), mientras que en la terminal 6
el nivel de tensión sea más pequeño que el nivel de voltaje contra el que se compara
la entrada Reset del FF-SR no se activará, por otra parte mientras que el nivel de
tensión presente en la terminal 2 sea más grande que el nivel de tensión contra el
que se compara la entrada Set del FF-SR no se activará.
Circuito monoestable:
En este caso el timmer 555 en su modo monoestable funcionará como un circuito
de un tiro. Dentro del 555 hay un transistor que mantiene a C1 descargado
inicialmente. Cuando un pulso negativo de disparo se aplica a terminal 2, el flip-flop
interno se setea, lo que quita el corto de C1 y esto causa una salida alta (un high)
en el terminal 3 (el terminal de salida).
La salida a través del capacitor aumenta exponencialmente con la constante de
tiempo:
t = R1 * C1
Cuando el voltaje a través de C1 iguala dos tercios de Vcc el comparador interno
del 555 se resetea el flip-flop, que entonces descarga el capacitor C1 rápidamente
y lleva al terminal de salida a su estado bajo (low). El circuito e activado con un
impulso de entrada que va en dirección negativa cuando el nivel llega a un tercio de
Vcc. Una vez disparado, el circuito permanece en ese estado hasta que pasa el
tiempo de seteo, aun si se vuelve a disparar el circuito.
La duración del estado alto (high) es dada por la ecuación:
T= 1.1 * (R1*C1)
El intervalo es independiente del voltaje de Vcc. Cuando el terminal reset no se usa,
debe atarse alto para evitar disparos espontáneos o falsos.
15
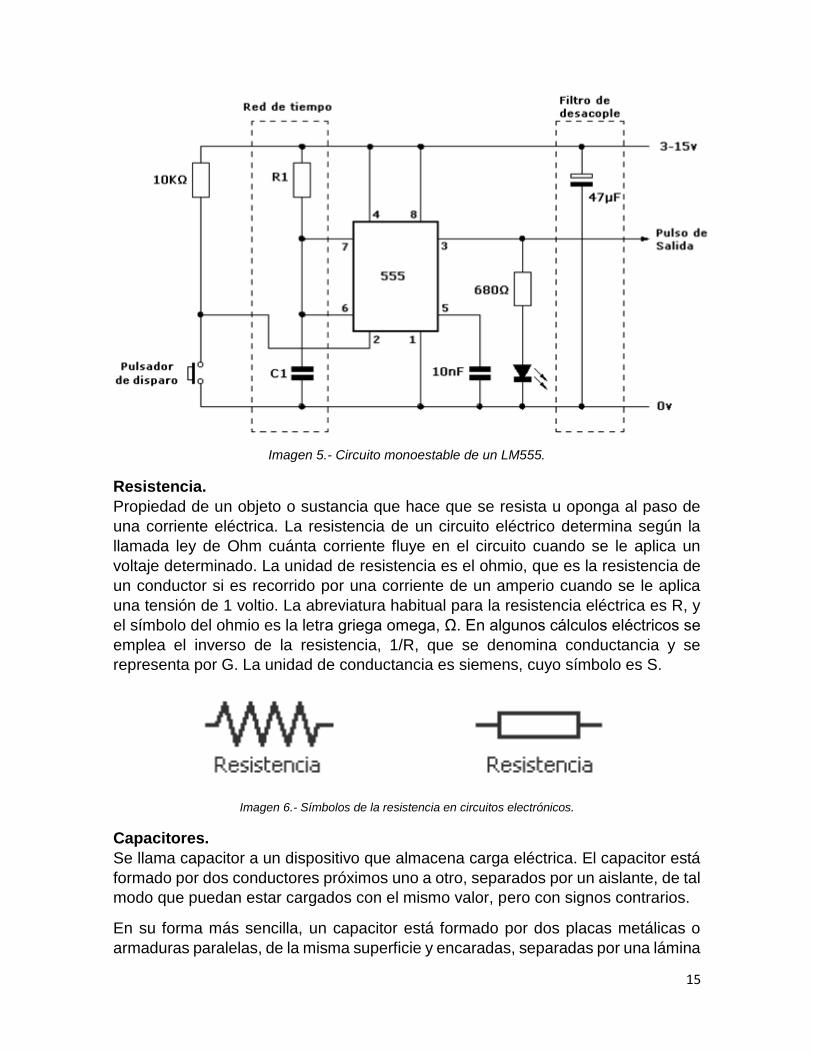
Imagen 5.- Circuito monoestable de un LM555.
Resistencia.
Propiedad de un objeto o sustancia que hace que se resista u oponga al paso de
una corriente eléctrica. La resistencia de un circuito eléctrico determina según la
llamada ley de Ohm cuánta corriente fluye en el circuito cuando se le aplica un
voltaje determinado. La unidad de resistencia es el ohmio, que es la resistencia de
un conductor si es recorrido por una corriente de un amperio cuando se le aplica
una tensión de 1 voltio. La abreviatura habitual para la resistencia eléctrica es R, y
el símbolo del ohmio es la letra griega omega, Ω. En algunos cálculos eléctricos se
emplea el inverso de la resistencia, 1/R, que se denomina conductancia y se
representa por G. La unidad de conductancia es siemens, cuyo símbolo es S.
Imagen 6.- Símbolos de la resistencia en circuitos electrónicos.
Capacitores.
Se llama capacitor a un dispositivo que almacena carga eléctrica. El capacitor está
formado por dos conductores próximos uno a otro, separados por un aislante, de tal
modo que puedan estar cargados con el mismo valor, pero con signos contrarios.
En su forma más sencilla, un capacitor está formado por dos placas metálicas o
armaduras paralelas, de la misma superficie y encaradas, separadas por una lámina
16
no conductora o dieléctrico. Al conectar una de las placas a un generador, ésta se
carga e induce una carga de signo opuesto en la otra placa. Por su parte, teniendo
una de las placas cargada negativamente (Q-) y la otra positivamente (Q+) sus
cargas son iguales y la carga neta del sistema es 0, sin embargo, se dice que el
capacitor se encuentra cargado con una carga Q.
Los capacitores pueden conducir corriente continua durante sólo un instante (por lo
cual podemos decir que los capacitores, para las señales continuas, es como un
cortocircuito), aunque funcionan bien como conductores en circuitos de corriente
alterna. Es por esta propiedad lo convierte en dispositivos muy útiles cuando se
debe impedir que la corriente continua entre a determinada parte de un circuito
eléctrico, pero si queremos que pase la alterna.
Los capacitores se utilizan junto con las bobinas, formando circuitos en resonancia,
en las radios y otros equipos electrónicos. Además, en los tendidos eléctricos se
utilizan grandes capacitores para producir resonancia eléctrica en el cable y permitir
la transmisión de más potencia.
Además son utilizados en: Ventiladores, motores de Aire Acondicionado, en
Iluminación, Refrigeración, Compresores, Bombas de Agua y Motores de Corriente
Alterna, por la propiedad antes explicada.
Los capacitores se fabrican en gran variedad de formas y se pueden mandar a hacer
de acuerdo a las necesidades de cada uno. El aire, la mica, la cerámica, el papel,
el aceite y el vacío se usan como dieléctricos, según la utilidad que se pretenda dar
al dispositivo. Pueden estar encapsulados en baquelita con válvula de seguridad,
sellados, resistentes a la humedad, polvo, aceite; con terminales para conector
hembra y/o soldadura. También existen los capacitores de Marcha o Mantenimiento
los cuales están encapsulados en metal. Generalmente, todos los Capacitores son
secos, esto quiere decir que son fabricados con cintas de plástico metalizado,
autoregenerativos, encapsulados en plástico para mejor aislamiento eléctrico, de
alta estabilidad térmica y resistente a la humedad.
El primer capacitor es la botella de Leyden, el cual es un capacitor simple en el que
las dos placas conductoras son finos revestimientos metálicos dentro y fuera del
cristal de la botella, que a su vez es el dieléctrico. La magnitud que caracteriza a un
capacitor es su capacidad, cantidad de carga eléctrica que puede almacenar a una
diferencia de potencial determinado.

17
La botella de Leyden, uno de los capacitores más simples, almacena una carga
eléctrica que puede liberarse, o descargarse, juntando sus terminales, mediante una
varilla conductora. La primera botella de Leyden se fabricó alrededor de 1745, y
todavía se utiliza en experimentos de laboratorio.
Para un capacitor se define su capacidad como la razón de la carga que posee uno
de los conductores a la diferencia de potencial entre ambos, es decir, la capacidad
es proporcional a la carga e inversamente proporcional a la diferencia de potencial:
C = Q / V, medida en Farad (F).
Imagen 7.- Capacitor Electrolítico.
Transistor 2N2222.
El 2N2222 es un transistor de unión bipolar basado en silicio; está ampliamente
disponible para su compra en tiendas de componentes electrónicos. Este transistor
se usa como un transistor con propósitos generales. Su bajo costo y disponibilidad
lista le permite al transistor ser usado a bajo voltaje o con circuitos electrónicos de
baja señal para aficionados.
18
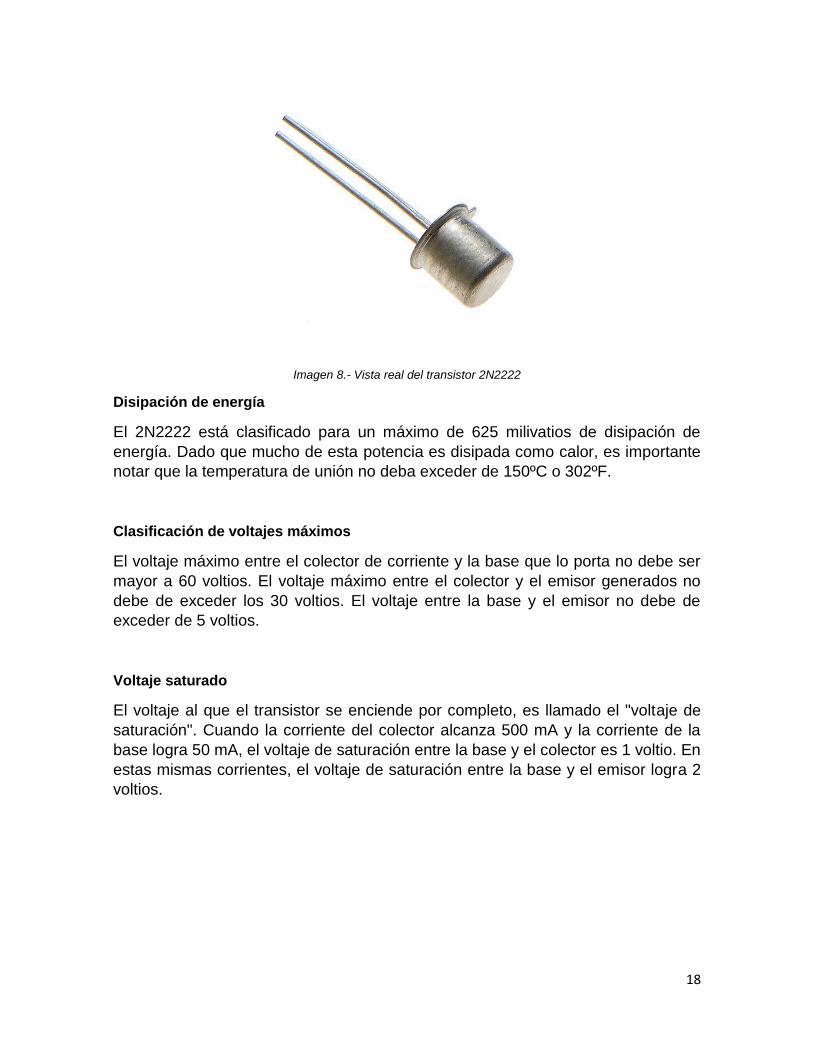
Imagen 8.- Vista real del transistor 2N2222
Disipación de energía
El 2N2222 está clasificado para un máximo de 625 milivatios de disipación de
energía. Dado que mucho de esta potencia es disipada como calor, es importante
notar que la temperatura de unión no deba exceder de 150ºC o 302ºF.
Clasificación de voltajes máximos
El voltaje máximo entre el colector de corriente y la base que lo porta no debe ser
mayor a 60 voltios. El voltaje máximo entre el colector y el emisor generados no
debe de exceder los 30 voltios. El voltaje entre la base y el emisor no debe de
exceder de 5 voltios.
Voltaje saturado
El voltaje al que el transistor se enciende por completo, es llamado el "voltaje de
saturación". Cuando la corriente del colector alcanza 500 mA y la corriente de la
base logra 50 mA, el voltaje de saturación entre la base y el colector es 1 voltio. En
estas mismas corrientes, el voltaje de saturación entre la base y el emisor logra 2
voltios.
19
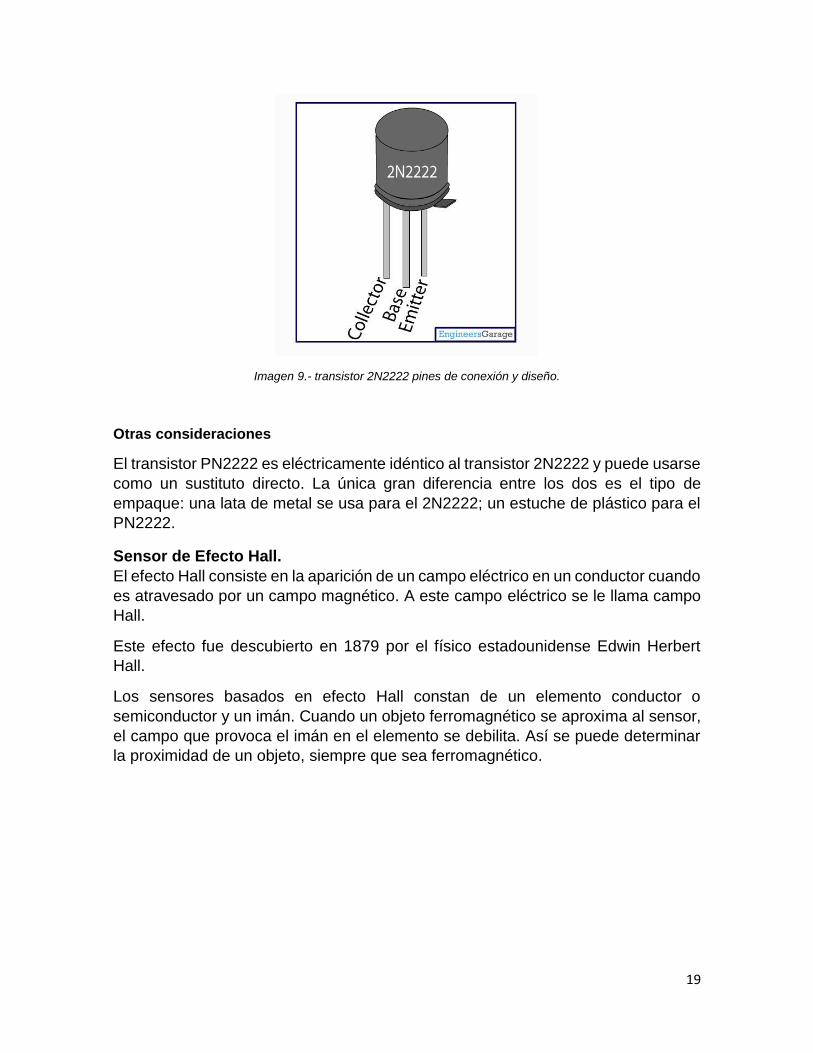
Imagen 9.- transistor 2N2222 pines de conexión y diseño.
Otras consideraciones
El transistor PN2222 es eléctricamente idéntico al transistor 2N2222 y puede usarse
como un sustituto directo. La única gran diferencia entre los dos es el tipo de
empaque: una lata de metal se usa para el 2N2222; un estuche de plástico para el
PN2222.
Sensor de Efecto Hall.
El efecto Hall consiste en la aparición de un campo eléctrico en un conductor cuando
es atravesado por un campo magnético. A este campo eléctrico se le llama campo
Hall.
Este efecto fue descubierto en 1879 por el físico estadounidense Edwin Herbert
Hall.
Los sensores basados en efecto Hall constan de un elemento conductor o
semiconductor y un imán. Cuando un objeto ferromagnético se aproxima al sensor,
el campo que provoca el imán en el elemento se debilita. Así se puede determinar
la proximidad de un objeto, siempre que sea ferromagnético.
20
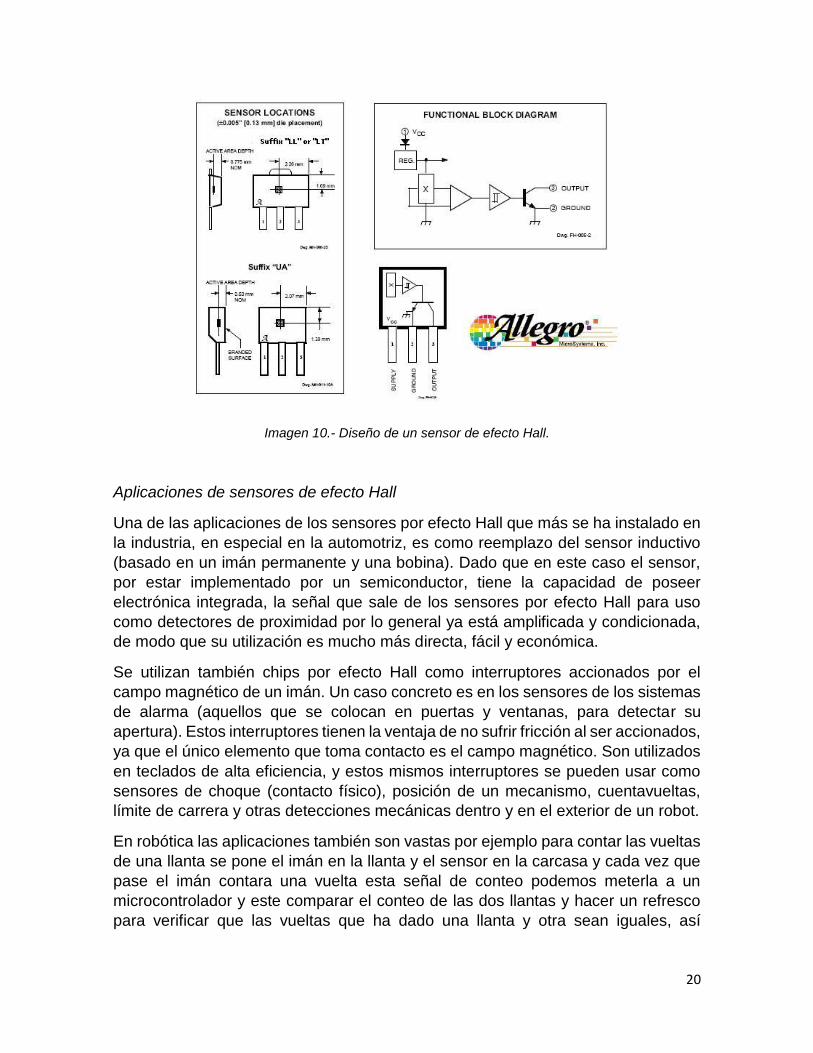
Imagen 10.- Diseño de un sensor de efecto Hall.
Aplicaciones de sensores de efecto Hall
Una de las aplicaciones de los sensores por efecto Hall que más se ha instalado en
la industria, en especial en la automotriz, es como reemplazo del sensor inductivo
(basado en un imán permanente y una bobina). Dado que en este caso el sensor,
por estar implementado por un semiconductor, tiene la capacidad de poseer
electrónica integrada, la señal que sale de los sensores por efecto Hall para uso
como detectores de proximidad por lo general ya está amplificada y condicionada,
de modo que su utilización es mucho más directa, fácil y económica.
Se utilizan también chips por efecto Hall como interruptores accionados por el
campo magnético de un imán. Un caso concreto es en los sensores de los sistemas
de alarma (aquellos que se colocan en puertas y ventanas, para detectar su
apertura). Estos interruptores tienen la ventaja de no sufrir fricción al ser accionados,
ya que el único elemento que toma contacto es el campo magnético. Son utilizados
en teclados de alta eficiencia, y estos mismos interruptores se pueden usar como
sensores de choque (contacto físico), posición de un mecanismo, cuentavueltas,
límite de carrera y otras detecciones mecánicas dentro y en el exterior de un robot.
En robótica las aplicaciones también son vastas por ejemplo para contar las vueltas
de una llanta se pone el imán en la llanta y el sensor en la carcasa y cada vez que
pase el imán contara una vuelta esta señal de conteo podemos meterla a un
microcontrolador y este comparar el conteo de las dos llantas y hacer un refresco
para verificar que las vueltas que ha dado una llanta y otra sean iguales, así
21
podemos asegurar que un robot vaya derecho y no verse afectado por alguna piedra
que haya atorado una llanta y desviado a nuestro robot móvil.
Transistor: Dispositivo electrónico de material semiconductor (germanio, silicio)
capaz de controlar una corriente eléctrica, amplificándola y/o conmutándola. Posee
tres conexiones: Colector, Emisor y Base.
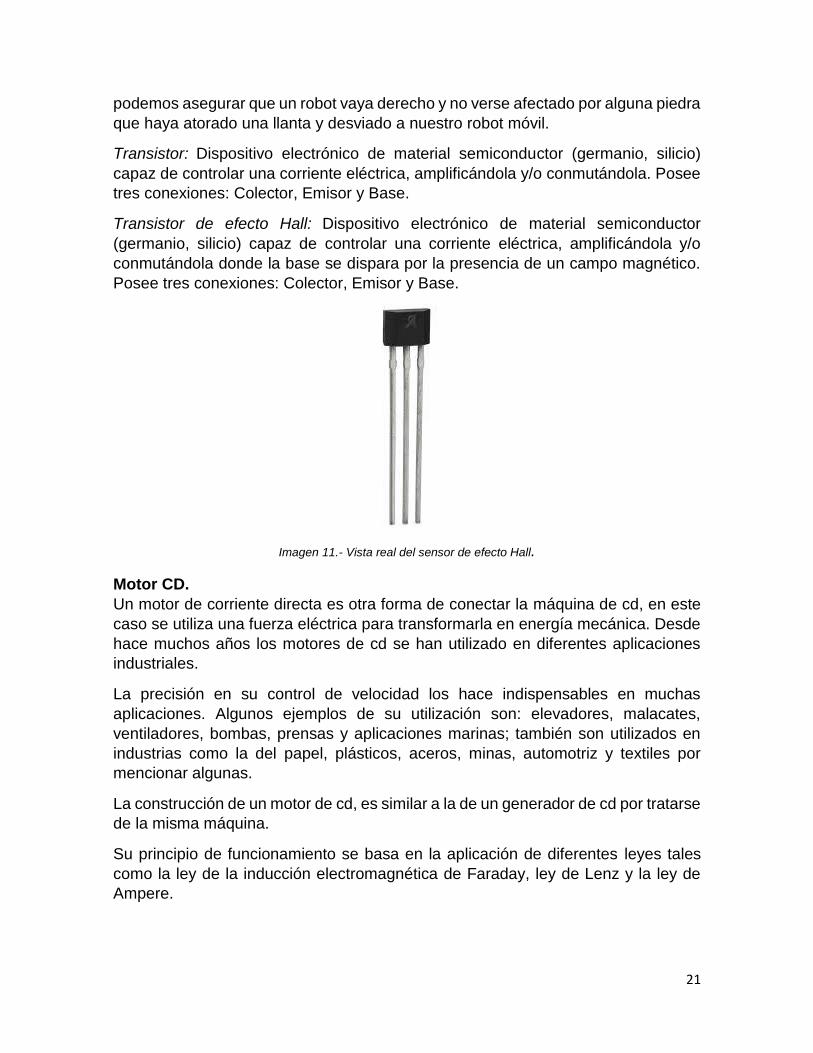
Transistor de efecto Hall: Dispositivo electrónico de material semiconductor
(germanio, silicio) capaz de controlar una corriente eléctrica, amplificándola y/o
conmutándola donde la base se dispara por la presencia de un campo magnético.
Posee tres conexiones: Colector, Emisor y Base.
Imagen 11.- Vista real del sensor de efecto Hall.
Motor CD.
Un motor de corriente directa es otra forma de conectar la máquina de cd, en este
caso se utiliza una fuerza eléctrica para transformarla en energía mecánica. Desde
hace muchos años los motores de cd se han utilizado en diferentes aplicaciones
industriales.
La precisión en su control de velocidad los hace indispensables en muchas
aplicaciones. Algunos ejemplos de su utilización son: elevadores, malacates,
ventiladores, bombas, prensas y aplicaciones marinas; también son utilizados en
industrias como la del papel, plásticos, aceros, minas, automotriz y textiles por
mencionar algunas.
La construcción de un motor de cd, es similar a la de un generador de cd por tratarse
de la misma máquina.
Su principio de funcionamiento se basa en la aplicación de diferentes leyes tales
como la ley de la inducción electromagnética de Faraday, ley de Lenz y la ley de
Ampere.
22
El motor de cd tiene también dos circuitos principales para su funcionamiento: el
circuito de campo o estator y el circuito de la armadura o rotor. El voltaje es
suministrado a la armadura a través de las escobillas y el conmutador.
El giro o rotación de un motor de corriente directa obedece a la interacción de los
dos circuitos magnéticos que tiene, es decir al campo magnético del estator, el cual
puede ser producido por imanes permanentes o bien por un devanado de campo y
al campo magnético de la armadura, el cual es producido por la corriente resultante
al aplicar una tensión a través de las escobillas y el conmutador. Como sabemos
siempre que fluye una corriente por un conductor, se genera un campo magnético
alrededor del mismo.
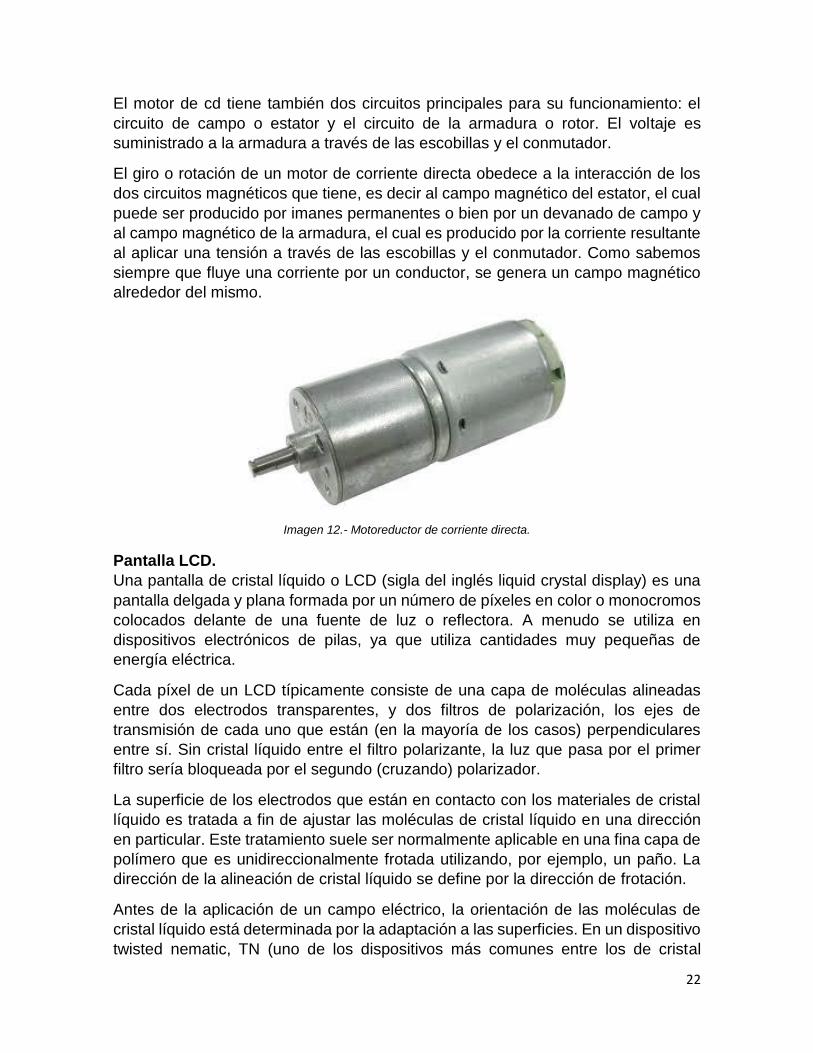
Imagen 12.- Motoreductor de corriente directa.
Pantalla LCD.
Una pantalla de cristal líquido o LCD (sigla del inglés liquid crystal display) es una
pantalla delgada y plana formada por un número de píxeles en color o monocromos
colocados delante de una fuente de luz o reflectora. A menudo se utiliza en
dispositivos electrónicos de pilas, ya que utiliza cantidades muy pequeñas de
energía eléctrica.
Cada píxel de un LCD típicamente consiste de una capa de moléculas alineadas
entre dos electrodos transparentes, y dos filtros de polarización, los ejes de
transmisión de cada uno que están (en la mayoría de los casos) perpendiculares
entre sí. Sin cristal líquido entre el filtro polarizante, la luz que pasa por el primer
filtro sería bloqueada por el segundo (cruzando) polarizador.
La superficie de los electrodos que están en contacto con los materiales de cristal
líquido es tratada a fin de ajustar las moléculas de cristal líquido en una dirección
en particular. Este tratamiento suele ser normalmente aplicable en una fina capa de
polímero que es unidireccionalmente frotada utilizando, por ejemplo, un paño. La
dirección de la alineación de cristal líquido se define por la dirección de frotación.
Antes de la aplicación de un campo eléctrico, la orientación de las moléculas de
cristal líquido está determinada por la adaptación a las superficies. En un dispositivo
twisted nematic, TN (uno de los dispositivos más comunes entre los de cristal
23
líquido), las direcciones de alineación de la superficie de los dos electrodos son
perpendiculares entre sí, y así se organizan las moléculas en una estructura
helicoidal, o retorcida. Debido a que el material es de cristal líquido birrefringente, la
luz que pasa a través de un filtro polarizante se gira por la hélice de cristal líquido
que pasa a través de la capa de cristal líquido, lo que le permite pasar por el segundo
filtro polarizado. La mitad de la luz incidente es absorbida por el primer filtro
polarizante, pero por lo demás todo el montaje es transparente.
Cuando se aplica un voltaje a través de los electrodos, una fuerza de giro orienta
las moléculas de cristal líquido paralelas al campo eléctrico, que distorsiona la
estructura helicoidal (esto se puede resistir gracias a las fuerzas elásticas desde
que las moléculas están limitadas a las superficies). Esto reduce la rotación de la
polarización de la luz incidente, y el dispositivo aparece gris. Si la tensión aplicada
es lo suficientemente grande, las moléculas de cristal líquido en el centro de la capa
son casi completamente desenrolladas y la polarización de la luz incidente no es
rotada ya que pasa a través de la capa de cristal líquido. Esta luz será
principalmente polarizada perpendicular al segundo filtro, y por eso será bloqueada
y el pixel aparecerá negro. Por el control de la tensión aplicada a través de la capa
de cristal líquido en cada píxel, la luz se puede permitir pasar a través de distintas
cantidades, constituyéndose los diferentes tonos de gris.
Desarrollo
1. Mediante la realización de una práctica para la asignatura de Sensores y
Acondicionamiento de Señales, en la cual se diseñó un carro seguidor de
sonido, se decidió implementar un microcontrolador que fuera la etapa de
control de un sistema, adaptando la práctica a los requerimientos que nos
hizo el maestro encargado del curso de Microcontroladores.
2. Se realizó el programa en Mikro C, realizando los cambios necesarios para
ajustar el código a la plataforma de compilación antes mencionada.
24
3. Se realizó la compilación del código en él microcontrolador 16F877A
usando un quemador de PIC´s y un programa que permite cargar los
códigos al dispositivo electrónico.
4. Se realizaron las pruebas correspondientes para apuntalar el sistema y
hacer que funcionara de la manera en que se había pretendido.
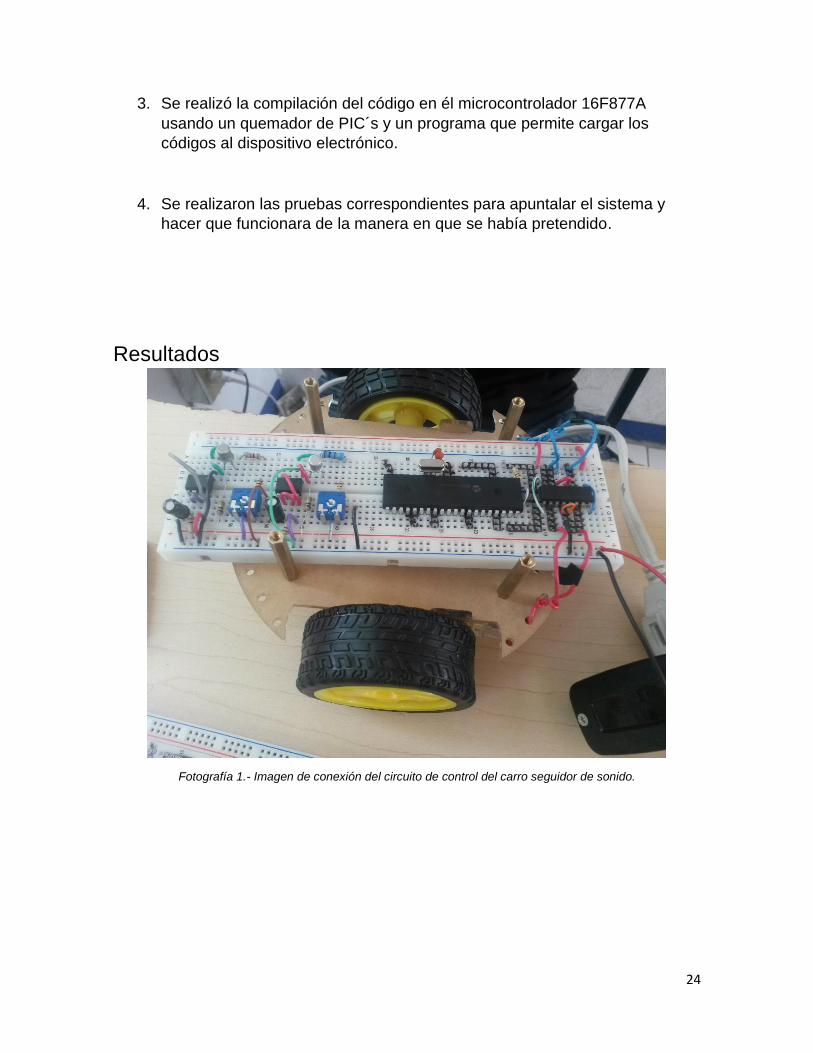
Resultados
Fotografía 1.- Imagen de conexión del circuito de control del carro seguidor de sonido.
25
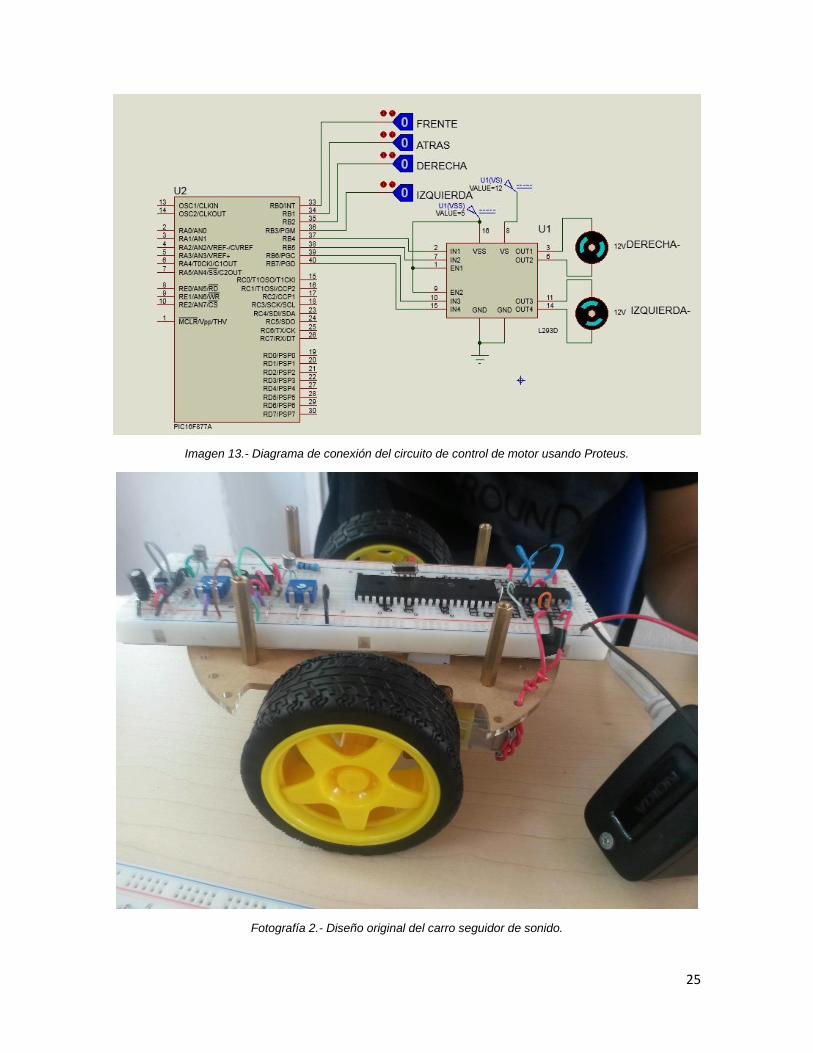
Imagen 13.- Diagrama de conexión del circuito de control de motor usando Proteus.
Fotografía 2.- Diseño original del carro seguidor de sonido.
26
Conclusión
Con los resultados obtenidos en la realización de este proyecto se obtuvo el
funcionamiento óptimo del sistema diseñado para las ideas que se habían
establecido previamente.
Se comprendieron las características del microcontrolador, las ventajas y
desventajas que representa su uso, así como también, se aprendieron nuevas
técnicas en cuanto a la realización de código. Con el hecho de poner en marcha un
sistema de control a partir de sensores y actuadores que realicen una determinada
acción, pone a prueba la importancia de los microcontroladores en la vida diaria y
su relevancia en el ámbito industrial, pues el uso de estos componentes electrónicos
solamente está limitado por la imaginación de quien la utiliza, pues sus aplicaciones
son tan variadas, que hacen de este componente un arma casi tan importante como
lo es la tecnología hoy por hoy en nuestra vida.
Bibliografía http://www.ehowenespanol.com/especificaciones-del-transistor-2n2222-info_205525/
http://www.inele.ufro.cl/bmonteci/semic/apuntes/capacitores/capacitores.htm
http://www.monografias.com/trabajos16/componentes-electronicos/componentes-
electronicos.shtml#RESIST
http://hgm.shibanazihuatanejo.com/ME/Notascurso/U2.pdf
http://electronicayciencia.blogspot.mx/2010/06/utilizar-un-microfono-electret.html


















