Reglamento torneo inter semestral de seguidores de línea básico (actualizado).pdf
10
Universidad Nacional Autónoma de México Facultad de Ingeniería Arduino Smart Car Rally Robots Seguidores de Línea Reglamento de Torneo 1
-
Upload
traceur-carlos-m-n -
Category
Documents
-
view
4 -
download
0
Transcript of Reglamento torneo inter semestral de seguidores de línea básico (actualizado).pdf
Universidad Nacional Autónoma de México Facultad de Ingeniería
Arduino Smart Car Rally Robots Seguidores de Línea
Reglamento de Torneo
1

Resumen
Este documento contiene la información, lineamientos y términos referentes a la
competencia Rally - NatCar, la cual consiste en el desarrollo de carreras entre dos robots
autónomos capaces de seguir fielmente el circuito simétrico marcado por una línea blanca o
negra, sobre una superficie del color opuesto a dicha línea. Los robots iniciarán
simultáneamente a recorrer el circuito en dos puntos diferentes paralelos entre sí,
señalados en la pista, el primer robot en llegar a su respectiva meta (punto de inicio de su
contrincante) será declarado como ganador de la contienda.
Para definir a los tres primeros lugares de la competencia se harán una serie de
eliminatorias en función de la cantidad de participantes que asistan al evento.
Objetivos
El planteamiento y desarrollo de esta prueba, dirigida a desarrolladores en general, tiene
como principales objetivos:
➢ Desarrollar e implementar algoritmos para el seguimiento fiel de una línea continua
y discontinua, control de velocidad, aprendizaje de trayectorias y variaciones a las
condiciones de iluminación.
➢ Fomentar las habilidades y aprendizaje del uso de microcontroladores aplicados a
proyectos con alto dinamismo.
➢ Acercar a los estudiantes de cualquier nivel al desarrollo de proyectos integrales
como lo es el diseño, construcción e implementación de mini robots.
➢ Realizar una prueba piloto sobre una nueva competencia de seguidores de línea en
el país para llevarse a cabo en el torneo de robótica de la UNAM el próximo año.
➢ Acreditar el curso inter semestral impartido en Junio-Julio del año en curso por
aquellos equipos que hayan participado en este.
2
1. Características de la pista de competencia
Las especificaciones generales del área de competencia son descritas a continuación:
1.1. Los colores a utilizar en el circuito serán blanco y negro mate, uno de estos
dos corresponderá a la superficie de fondo y el otro a la línea central que
indicará el circuito y aquellos señalamientos auxiliares que formarán parte
del circuito.
1.2. La pista se formará de varias piezas, será al estilo de una pista de juguete
cuyo ancho será de 300 mm, teniendo la línea a seguir por el centro. La
longitud total del circuito será mínimo de 20 metros.
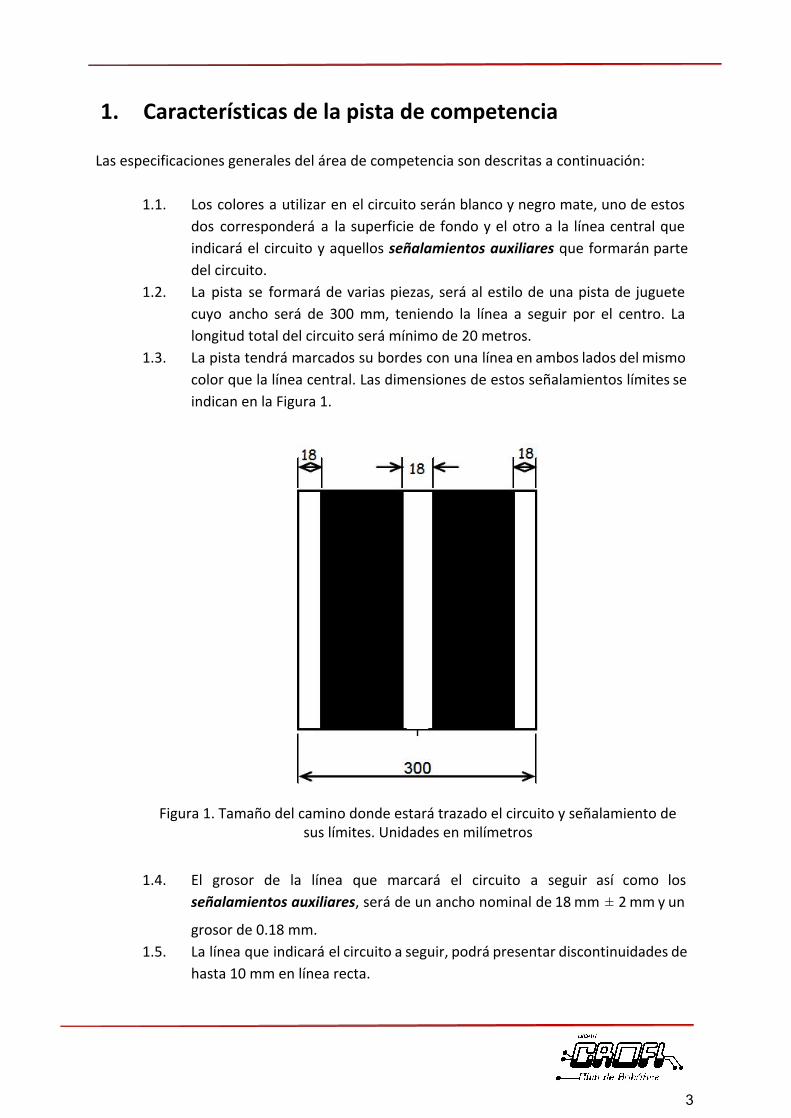
1.3. La pista tendrá marcados su bordes con una línea en ambos lados del mismo
color que la línea central. Las dimensiones de estos señalamientos límites se
indican en la Figura 1.
Figura 1. Tamaño del camino donde estará trazado el circuito y señalamiento de sus límites. Unidades en milímetros
1.4. El grosor de la línea que marcará el circuito a seguir así como los
señalamientos auxiliares, será de un ancho nominal de 18 mm 2 mm y un ±
grosor de 0.18 mm.
1.5. La línea que indicará el circuito a seguir, podrá presentar discontinuidades de
hasta 10 mm en línea recta.
3

1.6. El circuito podrá presentar curvas, vueltas e incorporaciones como las
mostradas en la Figura 2.
Dimensiones en milímetros
Figura 2 Configuración de curvas, vueltas e incorporaciones que podrán estar presentes en el circuito de la competencia. Las líneas con entramado no estarán presentes en la pista. La Imagen A son discontinuidades no lineales del circuito, que tendrán como dimensiones las señaladas en la imagen.
El radio mínimo de las curvas será de 180 mm.
1.7. El punto de inicio y final del recorrido será marcado por dos cuadrados
perpendiculares a la línea central, uno de cada lado, de tal forma que todos
los sensores estarán observando un mismo color, que será el de la línea del
circuito. Los robots deberán de identificar dichos puntos, enfatizando la
distinción de la meta para que el robot se detenga solo una vez cruzado este
punto. La Figura 3, ilustra lo descrito en este número.
4
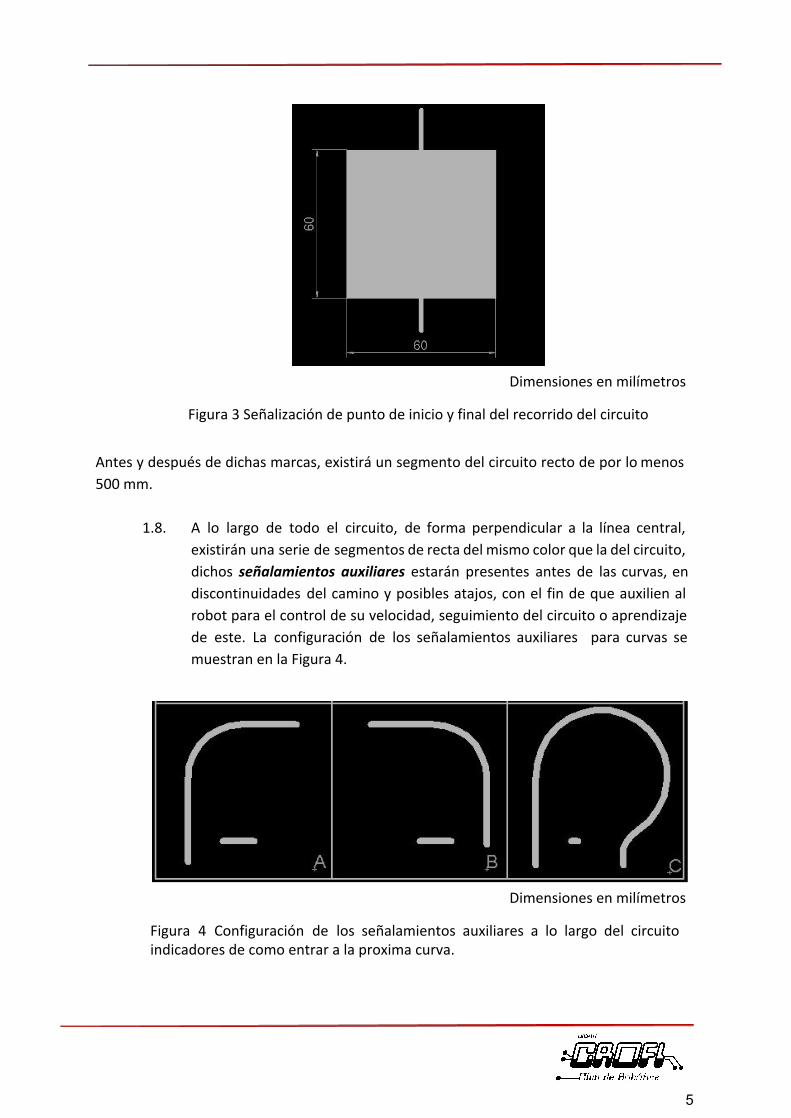
Dimensiones en milímetros
Figura 3 Señalización de punto de inicio y final del recorrido del circuito
Antes y después de dichas marcas, existirá un segmento del circuito recto de por lo menos
500 mm.
1.8. A lo largo de todo el circuito, de forma perpendicular a la línea central,
existirán una serie de segmentos de recta del mismo color que la del circuito,
dichos señalamientos auxiliares estarán presentes antes de las curvas, en
discontinuidades del camino y posibles atajos, con el fin de que auxilien al
robot para el control de su velocidad, seguimiento del circuito o aprendizaje
de este. La configuración de los señalamientos auxiliares para curvas se
muestran en la Figura 4.
Dimensiones en milímetros
Figura 4 Configuración de los señalamientos auxiliares a lo largo del circuito indicadores de como entrar a la proxima curva.
5
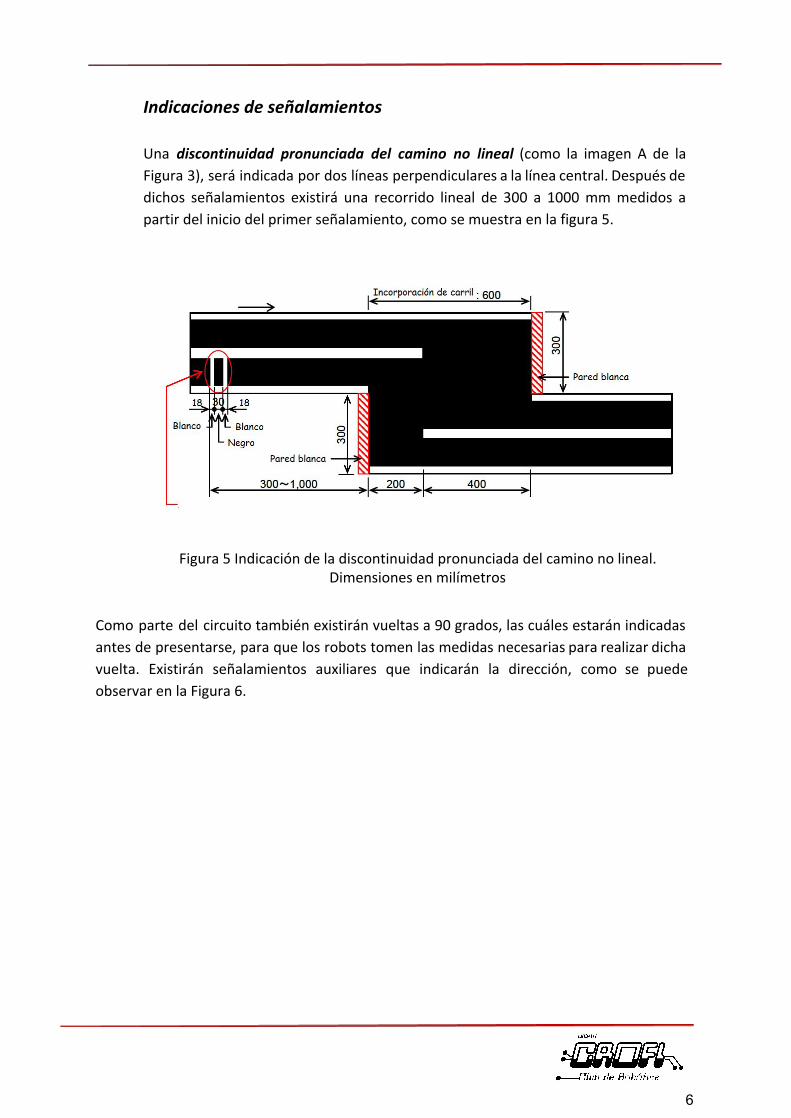
Indicaciones de señalamientos
Una discontinuidad pronunciada del camino no lineal (como la imagen A de la
Figura 3), será indicada por dos líneas perpendiculares a la línea central. Después de
dichos señalamientos existirá una recorrido lineal de 300 a 1000 mm medidos a
partir del inicio del primer señalamiento, como se muestra en la figura 5.
Figura 5 Indicación de la discontinuidad pronunciada del camino no lineal. Dimensiones en milímetros
Como parte del circuito también existirán vueltas a 90 grados, las cuáles estarán indicadas
antes de presentarse, para que los robots tomen las medidas necesarias para realizar dicha
vuelta. Existirán señalamientos auxiliares que indicarán la dirección, como se puede
observar en la Figura 6.
6
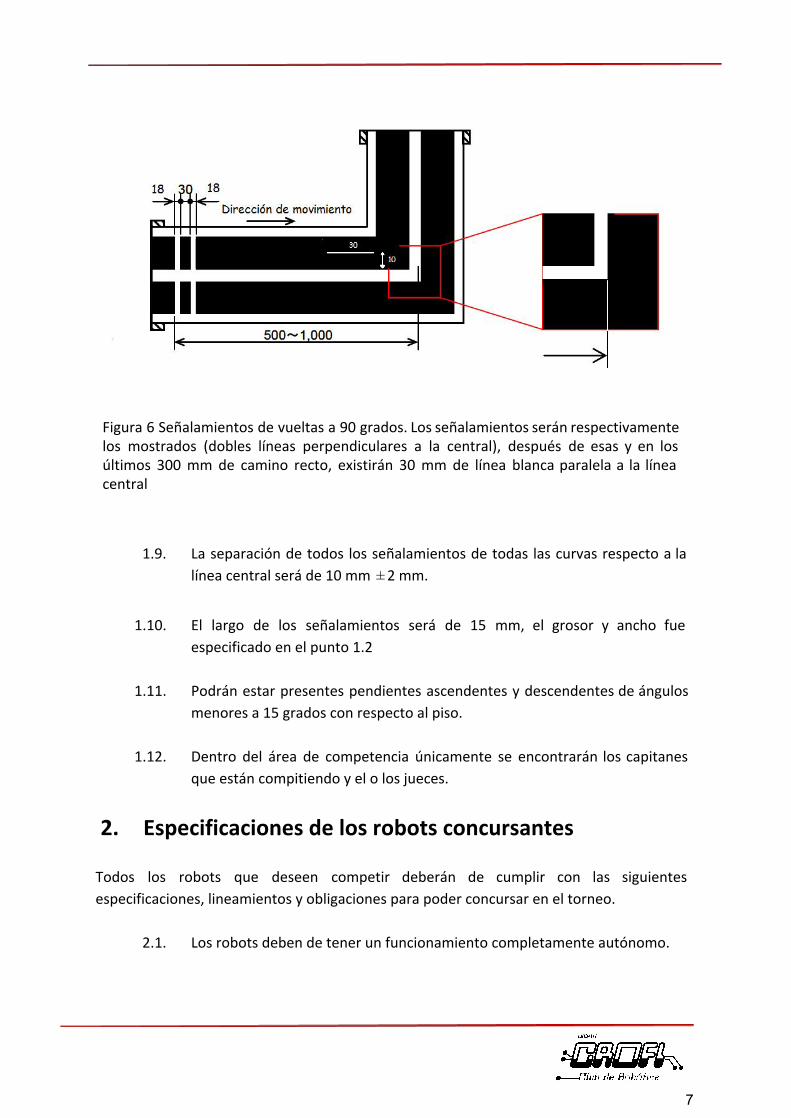
Figura 6 Señalamientos de vueltas a 90 grados. Los señalamientos serán respectivamente los mostrados (dobles líneas perpendiculares a la central), después de esas y en los últimos 300 mm de camino recto, existirán 30 mm de línea blanca paralela a la línea central
1.9. La separación de todos los señalamientos de todas las curvas respecto a la
línea central será de 10 mm 2 mm.±
1.10. El largo de los señalamientos será de 15 mm, el grosor y ancho fue
especificado en el punto 1.2
1.11. Podrán estar presentes pendientes ascendentes y descendentes de ángulos
menores a 15 grados con respecto al piso.
1.12. Dentro del área de competencia únicamente se encontrarán los capitanes
que están compitiendo y el o los jueces.
2. Especificaciones de los robots concursantes
Todos los robots que deseen competir deberán de cumplir con las siguientes
especificaciones, lineamientos y obligaciones para poder concursar en el torneo.
2.1. Los robots deben de tener un funcionamiento completamente autónomo.
7
2.2. Deberá de contar con una fuente de energía propia, es decir, se prohíbe
alimentar el robot de forma alámbrica.
2.3. Cada robot deberá de tener algún distintivo que lo identifique del resto, así
como contar con un nombre.
2.4. Cada prototipo podrá tener como dimensiones de área máximas 200 mm x
250 mm, sin límite de altura.
2.5. No deberán de dañar la pista de competencia ni dejar rastro de alguna
sustancia que haga la superficie resbalosa o que haga borroso el circuito.
2.6. Deberá de contar con un interruptor independiente al del suministro de
energía para poder iniciar el funcionamiento del robot.
2.7. Podrá contar con cualquier tipo de electrónica que le permita cumplir con su
objetivo a cumplir.
2.8. Deberán de poder seguir la línea sin importar las condiciones de iluminación
donde se desarrolle la competencia.
3. Participantes
Podrá participar todas aquellas personas que cumplan con los lineamientos de este
documento, además:
3.1. Están permitidos equipos de máximo tres integrantes, de los cuáles uno debe
de ser nombrado como capitán del equipo quien será responsable de
manejar el robot en el desarrollo de la competencia y podrá aclarar cualquier
punto de dicho reglamento.
3.2. Durante la competencia, todos los integrantes deberán de utilizar un lenguaje
apropiado de convivencia (sin groserías, palabras en doble sentido, etc.) y
respetar a los contrincantes, a los posibles espectadores y por supuesto a los
jueces de la competencia.
3.3. Todo el equipo deberá de estar al pendiente de las indicaciones y llamados a
competir.
8
3.4. En caso de alguna falta de conducta o el incumplimiento de cualquier
lineamiento, el o los jueces podrán descalificar al equipo, sin apelación
alguna.
4. Desarrollo de la competencia
Descripción
El concurso consiste en desarrollar una serie de carreras, para encontrar a los tres mejores
robots de la contienda. Antes de iniciar la competencia, acorde al número de participantes
se determinará la forma de eliminatoria y el sorteo para definir de forma aleatoria los
encuentros y los puntos de inicio.
Una vez definidas las eliminatorias, se dará un tiempo para hacer las últimas pruebas y
ajustes antes de iniciar las carreras. El o los jueces darán la indicarán el momento en el que
todos los robots sin excepción alguna deberán de pasar a revisión, para ver si cumplen con
las especificaciones mencionadas en el punto 2 de este documento, dicho proceso se le
conocerá como homologación. Aprobada la homologación, los robots se quedarán en un lugar visible a todos sin la posibilidad de hacerle modificación alguna, incluyendo la carga de batería.
Acorde a las eliminatorias, el juez anunciará los encuentros a realizarse uno por uno.
Solicitando que pase los capitanes de los equipos a concursar, los cuáles tendŕan que
acceder al área de competencia para tomar sus respectivos robots.
El juez dará dos minutos para hacer los últimos ajustes, antes de iniciar la carrera; en este
tiempo se podrá realizar una vuelta de reconocimiento de todo el circuito. A la indicación los
robots tendrán que colocarse en sus puntos de salida y posterior a esto los capitanes se
deberán de saludar de mano.
A la señal de salida, los capitanes pondrán en funcionamiento sus robots, teniendo la
posibilidad de seguir su robot sin interferir a su contrincante. Únicamente lo dos capitanes y
el o los jueces podrán estar dentro del área de competencia.
Reingresos al circuito
Si durante el trayecto del circuito, el robot se llegará a salir, el capitán de dicho robot podrá
volverlo a colocar en el camino, únicamente lo podrá hacer 2 veces, en caso de que el robot
se salga una tercera ocasión se declarará como perdedor de la prueba.
9
Dichos reingresos al circuito únicamente se podrán hacer si no se interfiere con el
desempeño del robot contrincante.
Ganador de la prueba
En cada carrera participarán dos robots, los cuales tendrán que recorrer todo el circuito en
el menor tiempo posible, declarando como ganador el robot que llegue en primer lugar a su
respectiva meta y se detenga acorde a lo señalado en el punto.
En resumen
4.1. Todos los robots pasarán a la homologación (revisión de lineamientos) y
serán recogidos y devueltos hasta que se termine la ronda de carreras.
4.2. Acorde a las eliminatorias, pasarán los capitanes por sus respectivos robots,
realizarán por 2 minutos los últimos ajustes.
4.3. Colocarán los robots en los puntos de inicio y a la señal de salida, los
capitanes iniciarán el funcionamiento de sus robots.
4.4. Ganará el robot que llegue primero a la meta y se detenga una vez que la
cruce.
Al terminar la carrera, acorde al criterio de eliminación los robots deberán de volver a
colocarse en el área donde fueron tomados al ser llamados a competir. Los equipos podrán
recoger sus robots hasta el final del set de carreras.
Entre cada ronda, el juez dará tiempo para realizar ajustes antes de volver a iniciar con el
procedimiento anteriormente descrito.
De ser posible, la pista se cambiará en cada ronda.
5. Transitorios
Todos aquellos sucesos que no se contemplen dentro del presente reglamento dentro y
durante la competencia serán resueltos por el Comité Organizador y jueces sin derecho de
apelación, de igual forma se reserva el derecho de cambiar las reglas sin previo aviso.
10