
Reducción de histéresis y ajuste a cero en servo válvulas ...
9
CIINDET 2010 VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico, 24 al 26 de noviembre de 2010, Cuernavaca Morelos, México. 567 1 Reducción de histéresis y ajuste a cero en servo válvulas DMX512 por medio un controlador PID aplicado a fuentes acuáticas musicales E. C. Capuano Zúñiga student member IEEE. M. García Quijada Resumen: Hoy en día es muy común la utilización de fuentes musicales danzantes o comúnmente conocidas como fuentes coreográficas musicales por organizaciones de gobierno así como personales con elevado estatus económico. Este tipo de fuentes brindan al lugar que las hospedan una estética y elegancia elevada así como también una oportunidad de interacción y entretenimiento relevante. Sin embargo, debido a los elevados costos, principalmente de instrumentación y control, hacen difícil su adquisición, e implementación final. Uno de los principales componentes que forman parte del sistema son las servo válvulas, que son encargadas de mantener el chorro de agua a una cierta altura, esto lográndose por medio de un sistema electrónico de control que controla la apertura y por ende el caudal de la válvula. En este artículo se describe la propuesta tecnológica del diseño de un sistema de control para válvulas de globo con apertura por protocolo de comunicación comercial DMX512 y una reducción considerable de histéresis y ajuste a cero por medio de un controlador PID. Abstract: Now a day it is very common the use of musical fountains that are meanly required by government areas or high economical resources customers. These fountains are also known as dancing fountains or choreographic musical fountains. This kind of entertainment systems offer great visual and elegant appearance to the place where it is hosted. However, due to high development and implementation cost, not all potential customers can acquire this kind of projects. One of the main components the fountains is compose with are the servo controlled valves, used it for controlling the water stream height. This article contains a technological proposal of a complete control system design applied to globe valves for controlling the flow level trough a DMX512 commercial protocol including primary the reduction of the hysteresis and zero adjustment in servo controlled valves applied to musical fountains trough a PID controller. In other words, the main objective of this proposal consists in controlling the water flowing inside the valve using a commercial protocol to assign the valve aperture serially. Keywords: musical fountains, servo controlled valves, DMX512, PID, choreographic, special effects. Introducción Actualmente, es muy común encontrar sistemas de entretenimiento con coreografías de agua y luces multicolores [11]. Este tipo de entretenimientos está basado principalmente en la construcción de obras civiles con estructuras de fuentes acuáticas simples[10], sin embargo, no solo desempeñan funciones de fuentes acuáticas comunes sino que también involucran componentes esenciales como chorros de agua a mediana presión con control de altura, luces multicolores de alta potencia y animaciones con movimiento de estos efectos especiales, pero principalmente sincronizados por una pista musical, esto es, los chorros de agua y las luces cambian sus estados continuamente para tratar de representar los cambios en las pistas musicales síncronamente. Los componentes encargados de crear los chorros de agua son las válvulas, estos componentes pueden comportarse de maneras diferentes y tener extensos diseños. Las válvulas que solamente abren y cierran su actuador al máximo se llaman electro válvulas y son usadas comúnmente en procesos en los que solo se requiere o no el flujo del líquido en el interior de la válvula [13]. Por otro lado existen válvulas con caudal ________________________________________________________ Ernesto Carlos Capuano Zuñiga ([email protected]) M.C. Manuel García Quijada ([email protected]) Universidad Autónoma de Querétaro, Campus San Juan del Río, Moctezuma S/N, San Juan del Río, Querétaro, México. www.uaq.mx
Transcript of Reducción de histéresis y ajuste a cero en servo válvulas ...

CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de noviembre de 2010, Cuernavaca Morelos, México.
567 1
Reducción de histéresis y ajuste a cero en servo válvulas DMX512
por medio un controlador PID aplicado a fuentes acuáticas
musicales
E. C. Capuano Zúñiga student member IEEE. M. García Quijada
Resumen: Hoy en día es muy común la utilización de
fuentes musicales danzantes o comúnmente conocidas
como fuentes coreográficas musicales por
organizaciones de gobierno así como personales con
elevado estatus económico. Este tipo de fuentes brindan
al lugar que las hospedan una estética y elegancia
elevada así como también una oportunidad de
interacción y entretenimiento relevante. Sin embargo,
debido a los elevados costos, principalmente de
instrumentación y control, hacen difícil su adquisición,
e implementación final. Uno de los principales
componentes que forman parte del sistema son las
servo válvulas, que son encargadas de mantener el
chorro de agua a una cierta altura, esto lográndose por
medio de un sistema electrónico de control que controla
la apertura y por ende el caudal de la válvula. En este
artículo se describe la propuesta tecnológica del diseño
de un sistema de control para válvulas de globo con
apertura por protocolo de comunicación comercial
DMX512 y una reducción considerable de histéresis y
ajuste a cero por medio de un controlador PID.
Abstract: Now a day it is very common the use of
musical fountains that are meanly required by
government areas or high economical resources
customers. These fountains are also known as dancing
fountains or choreographic musical fountains. This kind
of entertainment systems offer great visual and elegant
appearance to the place where it is hosted. However,
due to high development and implementation cost, not
all potential customers can acquire this kind of projects.
One of the main components the fountains is compose
with are the servo controlled valves, used it for
controlling the water stream height. This article
contains a technological proposal of a complete control
system design applied to globe valves for controlling
the flow level trough a DMX512 commercial protocol
including primary the reduction of the hysteresis and
zero adjustment in servo controlled valves applied to
musical fountains trough a PID controller. In other
words, the main objective of this proposal consists in
controlling the water flowing inside the valve using a
commercial protocol to assign the valve aperture
serially.
Keywords: musical fountains, servo controlled valves,
DMX512, PID, choreographic, special effects.
Introducción
Actualmente, es muy común encontrar sistemas de
entretenimiento con coreografías de agua y luces
multicolores [11]. Este tipo de entretenimientos está
basado principalmente en la construcción de obras
civiles con estructuras de fuentes acuáticas simples[10],
sin embargo, no solo desempeñan funciones de fuentes
acuáticas comunes sino que también involucran
componentes esenciales como chorros de agua a
mediana presión con control de altura, luces
multicolores de alta potencia y animaciones con
movimiento de estos efectos especiales, pero
principalmente sincronizados por una pista musical,
esto es, los chorros de agua y las luces cambian sus
estados continuamente para tratar de representar los
cambios en las pistas musicales síncronamente.
Los componentes encargados de crear los chorros de
agua son las válvulas, estos componentes pueden
comportarse de maneras diferentes y tener extensos
diseños. Las válvulas que solamente abren y cierran su
actuador al máximo se llaman electro válvulas y son
usadas comúnmente en procesos en los que solo se
requiere o no el flujo del líquido en el interior de la
válvula [13]. Por otro lado existen válvulas con caudal
________________________________________________________ Ernesto Carlos Capuano Zuñiga ([email protected])
M.C. Manuel García Quijada ([email protected])
Universidad Autónoma de Querétaro, Campus San Juan del Río,
Moctezuma S/N, San Juan del Río, Querétaro, México. www.uaq.mx

CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
2
controlado y válvulas de presión controlada así como
muchos más tipos pero en esta investigación solo se
hace referencia principalmente a las válvulas de flujo
controlado debido a que es necesario controlar el
flujo[14]. Existen variadas empresas dedicadas al
diseño, desarrollo y comercialización de válvulas de
control de flujo o también llamadas válvulas servo
controladas, pero con precios demasiado elevados
(arriba de 16,000 MX.) que hacen muy difícil su
adquisición y mantenimiento. Los tipos de válvulas
comerciales funcionan con vástagos de tornillo que
mueven el actuador girándolo con un gran torque y
velocidad, lo que hace que el motor y los componentes
internos tengan elevados costos. Existen también otros
tipos de válvulas que funcionan principalmente con aire
para mover el actuador y controlar la apertura de la
válvula en determinados instantes por medio de un
voltaje variable suministrado en la bobina del actuador,
pero se encuentra en precios que van desde los 24,000 a
los 34,000 pesos mexicanos. Debido a que estas
últimas cuentan con demasiados componentes, el precio
de fabricación y comercialización se incrementa de
manera drástica.
Con referencia a las válvulas comerciales que se
utilizan para la construcción de fuentes musicales se
han analizado las válvulas serie 1X de la compañía
Rexroth (del grupo Bosh, compañía líder en
fabricación y comercialización de válvulas de variados
tipos para la industria y con un gran nivel de ventas a
nivel mundial) y se ha tomado como referencia su
funcionalidad y gran parecido con el desempeño de las
válvulas usadas en fuentes musicales [12]. Este tipo de
válvulas cuenta con una solenoide proporcional que
mueve un vástago de metal en el interior de la válvula
para permitir la entrada de un flujo proporcional y por
tanto un salida mesurada de manera proporcional a la
relación de voltaje en la entrada de la bobina. Una de
las principales desventajas de este tipo de válvulas
como ya se había comentado es el elevado costo y la
máxima velocidad de cambio de flujo en el interior de
la válvula, esto debido a la baja velocidad de respuesta
de las bobinas proporcionales [5].
Para el desarrollo de este artículo también se han
tomado en consideración diseños de varios fabricantes
como: moog, paker y burkert entre otras.
También cabe mencionar que los voltajes de trabajo de
las válvulas comerciales son de 2 a 10 volts
comúnmente, que serán los que indiquen la apertura de
manera proporcional a su valor. Esto último hace de la
válvula un dispositivo que tiene que ser utilizado por
tarjetas de control que trabajen con esos voltajes y con
corrientes ya definidas por la compañía que los fabrica.
Por otro lado durante la implementación de una fuente
musical se requiere más de una válvula para realizar
una coreografía visible por lo que se deben de tener
tarjetas de control para válvulas con capacidades
grandes de manejo de señales así como también un
control independiente en cada dispositivo. Pare evitar
de manera la conectividad excesiva de muchas válvulas
con valores independientes las compañías han decidido
utilizar un protocolo de comunicación serial para
dispositivos de efectos especiales utilizado
comúnmente; este protocolo se llama DMX512
(Digital MultipleX de 512 canales máximo) [10] y
consiste en enviar 512 datos de ocho bits a cada
dispositivo definido por una única dirección, para así
definir la apertura del actuador proporcional al valor
recibido. La mayor ventaja de utilizar este protocolo
para controlar la apertura de la válvula es que el
protocolo está estandarizado y es suficiente su
desempeño para este tipo de aplicaciones. Una ventaja
muy notable al utilizar este tipo de protocolos es la
escalabilidad que se le puede dar al proyecto por el
hecho de poder aumentar la cantidad de válvulas a
controlar con solo indicarlo en el protocolo de
comunicación. El protocolo de comunicación DM
cuenta con un límite máximo de universos de tres.
Estos universos son los 512 paquetes que se envían a
través del protocolo pero se puede enviar un conjunto
más de 512 paquetes de datos cuando el usuario así lo
decida sin ningún problema.
Uno de los argumentos principales para la creación de
este tipo de sistemas de válvulas proporcionales es que
debido a que las luces que se utilizan en las fuentes
musicales se comunican solamente a través de
protocolo de comunicación DMX, así que, es y será
necesario la incorporación de válvulas proporcionales
con protocolos de comunicación digital serial como la
que se desarrollo en esta investigación. Teniendo en
cuanta que el protocolo de comunicación DMX512 es
un protocolo normalizado y que permite interconectar

CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
3
varias válvulas con esta estructura aun cuando todas
sean de diferente fabricante.
Para el desarrollo del controlador principal del actuador
se ha considerado un controlador PID (Proporcional
Integral Derivativo) debido a que se ha demostrado ser
eficiente en muchas aplicaciones industriales [6].
También se involucra el desarrollo de una pequeña
etapa de potencia para poder suministrar energía
necesaria al motor que será el encargado de mover el
vástago y así modificar el flujo total que pasa por la
válvula. La selección de este controlador permite a la
válvula colocarse en la posición deseada en velocidades
mayores a la de las válvulas comerciales así como
también evita algún sobre paso en la posición final del
actuador evitando así posiciones erróneas de la válvula
en instantes específicos. La finalidad de obtener la
mayor velocidad posible y la menor histéresis posible
es que debido a que durante su utilización en la fuente
musical, ésta trabajará a frecuencias de apertura y cierre
relativamente elevados siendo necesario que los
cambios de flujo en la fuente no se desfasen con
respecto a la pista musical en turno que se esté
reproduciendo.
Haciendo un pequeño resumen del objetivo final del
articulo se llega a un sistema capaz de controlar la
apertura de una válvula comercial de uso común para
controlar la altura de un chorro de agua con el menor
retardo posible [1]; que a su vez se traduce en la
creación de una serie de efectos especiales
sincronizados con una pista musical que serán aplicados
únicamente a fuentes coreográficas musicales con un
protocolo de comunicación serial normalizado.
Metodología
En la Figura 1 se muestra un esquema básico de la
estructura del sistema. El primer bloque consiste la
representación física entre el protocolo DMX512 y el
sistema. Siendo un protocolo serial se inducen en él
muchas características que pueden o no también ser
nombradas ventajas.
Fig. 1 Esquema básico de control para servo válvula con protocolo DMX512.
Una de esas ventajas es la cantidad reducida de
terminales para enviar la información y la velocidad de
transferencia de datos máxima.
El protocolo DMX512 consiste en el envío asíncrono
continuo de 512 paquetes digitales de 8 bits con
tiempos definidos entre uno y otro, esta diferencia de
tiempo es la velocidad de transferencia del protocolo
[10]. El protocolo de comunicación DMX512 tiene una
velocidad de transferencia común que es de 250 kilobits
por segundo, lo cual entrega un tiempo de actualización
de canales entre uno y otro de 22.7 milisegundos. En la
Figura 2 se muestra una estructura DMX512 básica
donde se puede apreciar el gran valor que aporta la
utilización de este protocolo. Cabe mencionar que otra
de las grandes ventajas que aporta este medio de
transmisión de datos es la gran distancia a la que puede
trabajar, debido a que solo hará falta agregar un
repetidor para poder amplificar la señal y reenviarla
nuevamente al siguiente dispositivo. También se puede
observar que los dispositivos van conectados uno con
otro lo cual evita grandes cantidades de conductor a la
hora de realizar la implementación final.
Fig. 2 Estructura base de protocolo DMX512
DISPOSITIVOMAESTRO
DIVISORVÁLVULA
LAMPARASMULTICOLOR
VÁLVULA
LAMPARASMULTICOLOR
REPETIDOR(AMPLIFICADORDE SEÑAL)
VÁLVULA
PROTOCOLODMX512

CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
4
En el bloque siguiente de la Figura 2 se decodifica
cada uno de estos 512 paquetes dependiendo de una
dirección única establecida en la placa de la válvula por
medio de un interruptor múltiple ubicado en la tarjeta
electrónica de la válvula. Este interruptor define de
manera binaria la dirección de asignación de canal para
la válvula. Existe también en este bloque un micro
controlador encargado de decodificar el valor de cada
canal con ayuda del interruptor múltiple, esto es,
sabiendo que continuamente se envían 512 paquetes en
tiempos definidos y con señales de inicio y terminación
de transmisión el decodificador solo toma los valores
que se encentren en la posición de envío igual a la del
interruptor. El dato recibido contiene una palabra
digital de ocho bits que indicara la apertura de la
válvula, esto es, si la palabra contiene un valor de 255
la válvula estará totalmente abierta y por el contrario si
el valor leído por el decodificador es 0, entonces la
válvula estará completamente cerrada, no hace falta
mencionar que los demás valores estarán
proporcionalmente relacionados con el valor de la
apertura final.
El valor leído del bloque de decodificación mostrado en
la Figura 1 es enviado de manera digital a un
convertidor digital-análogo de ocho bits de la empresa
National Semiconductors [8]. El dispositivo Digital-
Análogo convierte el valor digital a analógico para
servir como referencia al bloque más importante de este
trabajo, que es el bloque del controlador PID analógico
[9]. Debido a que se requieren bajos costos de
implementación es necesario utilizar también
componentes de bajo costo como los son los analógicos
en este caso. El módulo del controlador PID consta de
tres ganancias ya ajustadas previamente por medio de la
identificación de la planta [3]. Sabiendo que la planta
del sistema será el motor encargado de posicionar la
válvula se tiene el siguiente esquema electrónico para la
obtención de la planta con una interpretación
matemática. Se prosigue a identificar el modelo
matemático del sistema mostrado en la Figura 3
considerando la entrada como un voltaje aplicado al
motor y la salida como la velocidad rotacional del eje
(rígido).
Fig. 3 Diagrama Eléctrico y Mecánico de la planta
La entrada está dada en volts y la salida en radianes por
segundo. Para obtener la función de transferencia de la
planta es necesario conocer los parámetros del sistema
que son:
• Momento de inercia del rotor (J)
• Coeficiente de amortiguamiento del sistema
mecánico (b)
• Constante de fuerza electromotriz K=Ke=Kt
• Resistencia eléctrica (R)
• Inductancia eléctrica (L)
• Entrada (V): Fuente de voltaje
• Salida (W): velocidad rotacional del eje
• Corriente Eléctrica del devanado (I)
• Posición Angular del Eje (Ө)
Las ecuaciones diferenciales que indican el
comportamiento eléctrico (1) y mecánico (2) que
obtenemos tienen la siguiente forma [6]
−� + ����� +
����� + � ∴ −� + �� + �� + �
(1)
�
����� + ����� = ����� ∴ ��� + ��� = ��� (2)
Obteniendo la ecuación (3) en el dominio de Laplace
(s) y tomando a e=Kw se obtiene lo siguiente
−� + ����� + ����� + ����� = 0
������ + ����� = ����� (3)
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
Obtenemos ahora la función de transferencia con
respecto al voltaje aplicado a la entrada y la velocidad
de rotación del eje como se muestra en la ecuación (4)
�
�=
�
��� + ���� + �� + ��
Debido a que solo interesa la posición angular del rotor
y no la velocidad angular se integran las dos partes de
la ecuación (4) multiplicándolas por 1/s
arroja la ecuación (5)
�
�=
�
���� + ���� + �� + ��
Ahora que ya se tiene la función de transferencia de la
planta solo queda conocer los valores de
para aplicar un controlador adecuado que en
caso es un PID[4].
Por medio de métodos comunes de identificación
ayuda de Matlab [15] se puede obtener
servo válvula con la siguiente apariencia (6)
��
��� + ��� + ���� + ��� + ��
La referencia de entrada al controlador PID
variar dentro de un rango de 0 y 5 volts. En la
se muestra el diagrama eléctrico del controlador PID
analógico.
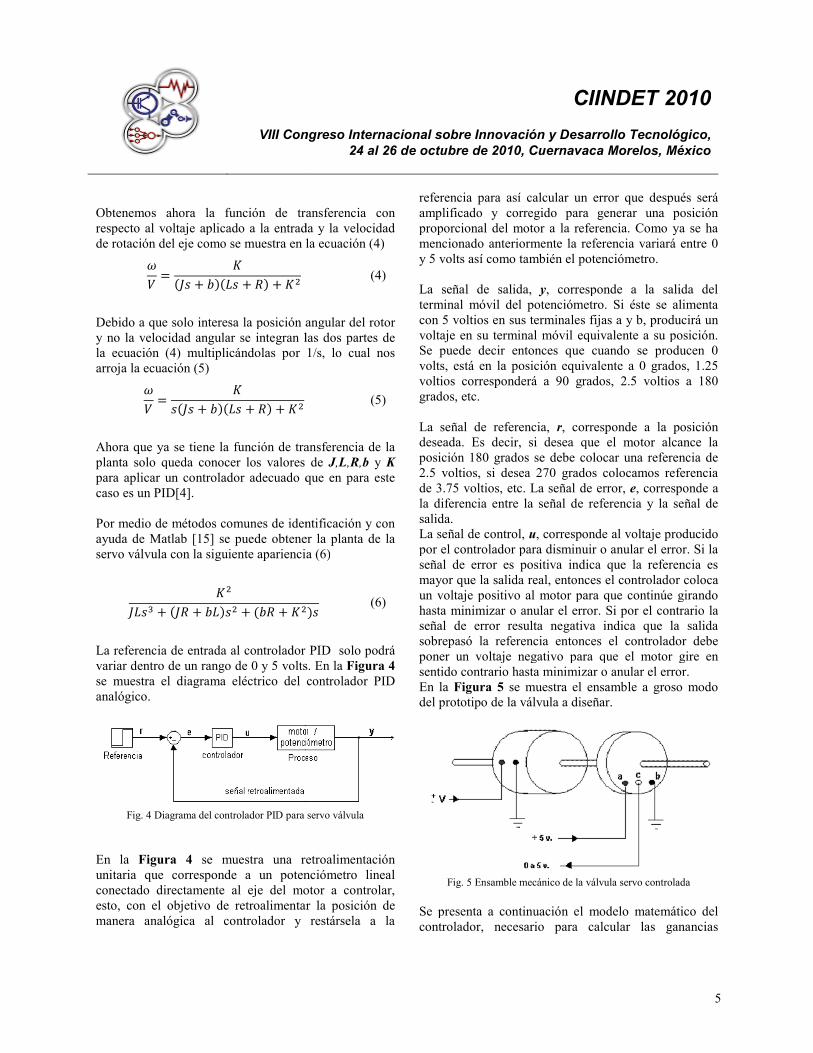
Fig. 4 Diagrama del controlador PID para servo válvula
En la Figura 4 se muestra una retroalimentación
unitaria que corresponde a un potenciómetro lineal
conectado directamente al eje del motor a controlar,
esto, con el objetivo de retroalimentar la posición de
manera analógica al controlador y re
CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
Obtenemos ahora la función de transferencia con
respecto al voltaje aplicado a la entrada y la velocidad
como se muestra en la ecuación (4)
(4)
la posición angular del rotor
las dos partes de
multiplicándolas por 1/s, lo cual nos
(5)
Ahora que ya se tiene la función de transferencia de la
anta solo queda conocer los valores de J,L,R,b y K
plicar un controlador adecuado que en para este
Por medio de métodos comunes de identificación y con
se puede obtener la planta de la
apariencia (6)
��� (6)
La referencia de entrada al controlador PID solo podrá
variar dentro de un rango de 0 y 5 volts. En la Figura 4
se muestra el diagrama eléctrico del controlador PID
Diagrama del controlador PID para servo válvula
se muestra una retroalimentación
unitaria que corresponde a un potenciómetro lineal
conectado directamente al eje del motor a controlar,
oalimentar la posición de
manera analógica al controlador y restársela a la
referencia para así calcular un error que después será
amplificado y corregido para generar una posición
proporcional del motor a la referencia. Como ya se ha
mencionado anteriormente la referencia variará entre 0
y 5 volts así como también el potenciómetro.
La señal de salida, y, corresponde a la salida del
terminal móvil del potenciómetro. Si éste se alimenta
con 5 voltios en sus terminales fijas
voltaje en su terminal móvil equivalente a su posición.
Se puede decir entonces que cuando se producen 0
volts, está en la posición equivalente a 0 grados, 1.25
voltios corresponderá a 90 grados, 2.5 voltios a 180
grados, etc.
La señal de referencia, r, corresponde a la posición
deseada. Es decir, si desea que el motor alcance la
posición 180 grados se debe colocar una referencia de
2.5 voltios, si desea 270 grados colocamos referencia
de 3.75 voltios, etc. La señal de error,
la diferencia entre la señal de referencia y la señal de
salida.
La señal de control, u, corresponde al voltaje producido
por el controlador para disminuir o anular el error. Si la
señal de error es positiva indica que la referencia es
mayor que la salida real, entonces el controlador coloca
un voltaje positivo al motor para que continúe girando
hasta minimizar o anular el error. Si por el contrario la
señal de error resulta negativa indica que la salida
sobrepasó la referencia entonces el controlador debe
poner un voltaje negativo para que el motor gire en
sentido contrario hasta minimizar o anular el error.
En la Figura 5 se muestra el ensamble a groso modo
del prototipo de la válvula a diseñar.
Fig. 5 Ensamble mecánico de la válvula serv
Se presenta a continuación el modelo matemático del
controlador, necesario para calcular las ganancias
CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
5
así calcular un error que después será
amplificado y corregido para generar una posición
proporcional del motor a la referencia. Como ya se ha
nte la referencia variará entre 0
y 5 volts así como también el potenciómetro.
, corresponde a la salida del
terminal móvil del potenciómetro. Si éste se alimenta
5 voltios en sus terminales fijas a y b, producirá un
equivalente a su posición.
decir entonces que cuando se producen 0
volts, está en la posición equivalente a 0 grados, 1.25
voltios corresponderá a 90 grados, 2.5 voltios a 180
, corresponde a la posición
que el motor alcance la
colocar una referencia de
270 grados colocamos referencia
de 3.75 voltios, etc. La señal de error, e, corresponde a
cia entre la señal de referencia y la señal de
, corresponde al voltaje producido
por el controlador para disminuir o anular el error. Si la
señal de error es positiva indica que la referencia es
onces el controlador coloca
un voltaje positivo al motor para que continúe girando
hasta minimizar o anular el error. Si por el contrario la
señal de error resulta negativa indica que la salida
sobrepasó la referencia entonces el controlador debe
voltaje negativo para que el motor gire en
sentido contrario hasta minimizar o anular el error.
se muestra el ensamble a groso modo
.
Ensamble mecánico de la válvula servo controlada
Se presenta a continuación el modelo matemático del
controlador, necesario para calcular las ganancias

VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
necesarias para el control correcto del giro del motor
[4]. Basándose en la definición de la función de
transferencia [2], se aplicará una señal escalón al
sistema, se graficará la salida, se encontrarán
ecuaciones de cada variable en el dominio del tiempo,
después serán llevadas al dominio de Laplace, y
último la relación salida-entrada será el modelo
matemático del mismo.
La señal de entrada (7) corresponde a una señal rampa
con pendiente m.
� = � � �
cuya transformada de Laplace es
���� ��
��
La señal de entrada corresponde a una señal escalón de
amplitud igual a la del voltaje de c
aplicada
���� � �
cuya transformada de Laplace es
��� ��
�
El modelo matemático será la función de transferencia
del sistema, es decir
! " � #�����
����
�$�
�
El modelo obtenido no tiene ceros y tiene un polo en el
origen. Un polo en el origen representa un sistema tipo
1.
La Figura 6 muestra el sistema en lazo cerrado sin
controlador, donde G(s) es la función de trasferencia
del conjunto motor-potenciómetro y H(s)
CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
necesarias para el control correcto del giro del motor
en la definición de la función de
señal escalón al
se encontrarán las
ecuaciones de cada variable en el dominio del tiempo,
al dominio de Laplace, y por
entrada será el modelo
corresponde a una señal rampa
(7)
(8)
La señal de entrada corresponde a una señal escalón de
amplitud igual a la del voltaje de corriente directa
(9)
(10)
El modelo matemático será la función de transferencia
(11)
El modelo obtenido no tiene ceros y tiene un polo en el
el origen representa un sistema tipo
muestra el sistema en lazo cerrado sin
es la función de trasferencia
H(s) es la función
de transferencia del lazo de retroalimentación, que en
este caso es unitaria.
La salida del sistema, y(t), es la señal de voltaje del
potenciómetro y, por lo tanto, la señal de referencia
debe ser una señal de voltaje de 0 a 5 voltios. Así, si se
desea un giro desde 0 a 180 grados se debe aplicar una
referencia de 2.5 voltios.
Fig. 6 Diagrama de bloques del controlador en lazo cerrado
La ecuación (17) de error [2]. Es decir, si la entrada es
un escalón de amplitud V (la transformada de Laplace
de la función escalón es V / s),
estacionario será
Por lo tanto,
Lo anterior quiere decir que el sistema en lazo cerrado
respondería ante una orden de ubicación en cualquier
posición angular, con gran exactitu
durante la implementación del controlador c
las ganancias del controlador está definida por un
arreglo simple de amplificadores operacionales
comunes. En la Figura 7 se muestra el diagrama
eléctrico del controlador PID analógico para la servo
válvula.
Fig. 7 Diagrama electrónico de controlador PID analógico
CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
6
de transferencia del lazo de retroalimentación, que en
es la señal de voltaje del
potenciómetro y, por lo tanto, la señal de referencia
debe ser una señal de voltaje de 0 a 5 voltios. Así, si se
desea un giro desde 0 a 180 grados se debe aplicar una
Diagrama de bloques del controlador en lazo cerrado
Es decir, si la entrada es
un escalón de amplitud V (la transformada de Laplace
el error en estado
(12)
(13)
Lo anterior quiere decir que el sistema en lazo cerrado
respondería ante una orden de ubicación en cualquier
posición angular, con gran exactitud. Por otro lado,
del controlador cada una de
las ganancias del controlador está definida por un
arreglo simple de amplificadores operacionales
se muestra el diagrama
eléctrico del controlador PID analógico para la servo
Diagrama electrónico de controlador PID analógico
CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
7
Los amplificadores a utilizar pueden ser de uso común
como los usados en amplificadores de instrumentación.
Cada una de las etapas es calculada con la debida planta
identificada y los valores de las ganancias que se le
darán a las resistencias dependen únicamente de la
planta y de la exactitud de los componentes
electrónicos. Para el caso específico en este artículo se
utilizó un motor de CD (Corriente Directa) de la marca
Buehler [7] de la familia 1.13.063.XXX que con sus
características se obtuvieron las siguientes ganancias y
la siguiente función de transferencia.
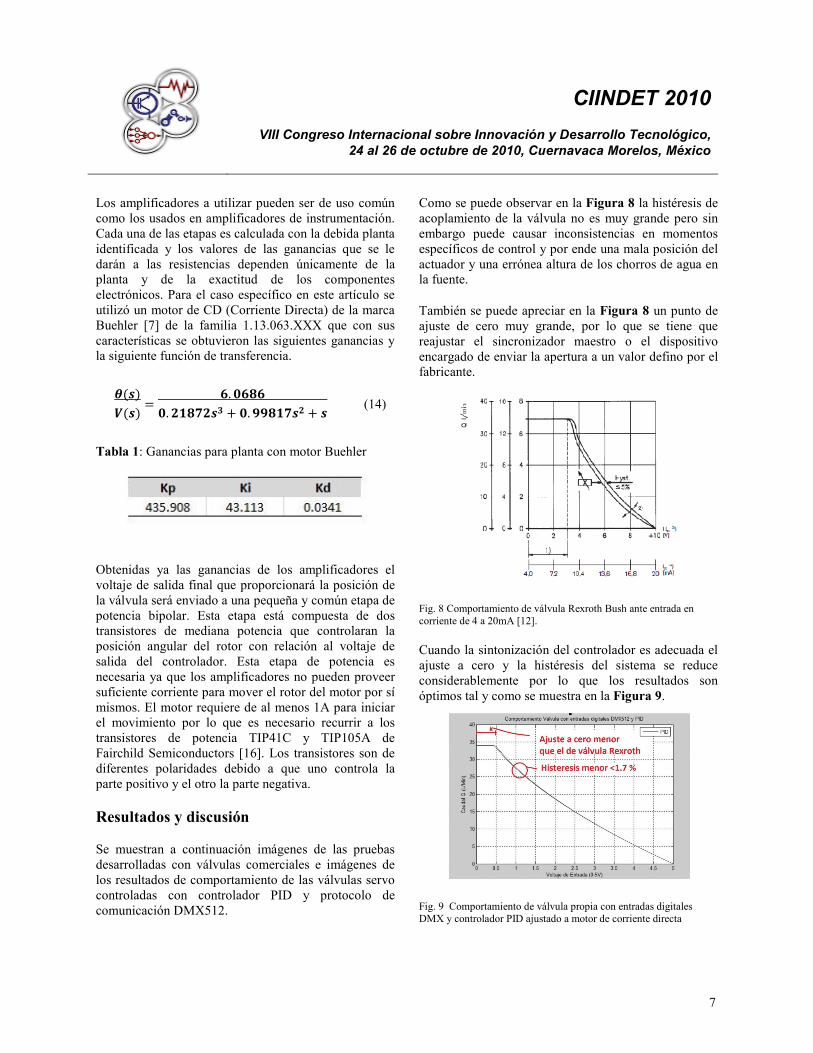
%�&�
'�&�=
(. *(+(
*. ,-+.,&/ + *. 00+-.&, + & (14)
Tabla 1: Ganancias para planta con motor Buehler
Obtenidas ya las ganancias de los amplificadores el
voltaje de salida final que proporcionará la posición de
la válvula será enviado a una pequeña y común etapa de
potencia bipolar. Esta etapa está compuesta de dos
transistores de mediana potencia que controlaran la
posición angular del rotor con relación al voltaje de
salida del controlador. Esta etapa de potencia es
necesaria ya que los amplificadores no pueden proveer
suficiente corriente para mover el rotor del motor por sí
mismos. El motor requiere de al menos 1A para iniciar
el movimiento por lo que es necesario recurrir a los
transistores de potencia TIP41C y TIP105A de
Fairchild Semiconductors [16]. Los transistores son de
diferentes polaridades debido a que uno controla la
parte positivo y el otro la parte negativa.
Resultados y discusión
Se muestran a continuación imágenes de las pruebas
desarrolladas con válvulas comerciales e imágenes de
los resultados de comportamiento de las válvulas servo
controladas con controlador PID y protocolo de
comunicación DMX512.
Como se puede observar en la Figura 8 la histéresis de
acoplamiento de la válvula no es muy grande pero sin
embargo puede causar inconsistencias en momentos
específicos de control y por ende una mala posición del
actuador y una errónea altura de los chorros de agua en
la fuente.
También se puede apreciar en la Figura 8 un punto de
ajuste de cero muy grande, por lo que se tiene que
reajustar el sincronizador maestro o el dispositivo
encargado de enviar la apertura a un valor defino por el
fabricante.
Fig. 8 Comportamiento de válvula Rexroth Bush ante entrada en
corriente de 4 a 20mA [12].
Cuando la sintonización del controlador es adecuada el
ajuste a cero y la histéresis del sistema se reduce
considerablemente por lo que los resultados son
óptimos tal y como se muestra en la Figura 9.
Fig. 9 Comportamiento de válvula propia con entradas digitales
DMX y controlador PID ajustado a motor de corriente directa

CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
8
Se puede apreciar de manera rápida la mejoría respecto
a respuesta e histéresis así como también la reducción
considerable del ajuste a cero de la válvula. Este tipo de
mejoras ayuda considerablemente al desempeño y
posicionamiento de la válvula, lo cual se traduce en una
altura correcta del chorro de agua cuando es aplicado a
fuentes musicales coreográficas. La entrada es un
voltaje que va desde 0 V hasta 5V.
Conclusiones
En este artículo se presentaron los resultados de la
comparativa de posicionamiento de actuadores
mecánicos entre válvulas comerciales con protocolo
DMX512 (REXROTH Bosh) y una válvula de diseño
propio con un controlador PID analógico. Se describe
su implementación con amplificadores comerciales de
bajo costo.
Debido a que el buen posicionamiento del actuador
depende tanto de la histéresis de la válvula como del
controlador se demostró que el diseño propio reduce
considerablemente la histéresis así como también el
ajuste a cero, lo cual hace que el desempeño de la
válvula y la eficiencia con respecto a válvulas
comerciales de aplicación para fuente musicales sea
mucho mejor. Cabe mencionar que no se alteran los
valores de posicionamiento digital DMX512 y se sigue
con la normalización del protocolo.
Se demuestra que el diseño analógico en este tipo de
proyecto es mejor debido a que sus costos son
relativamente más bajos que los diseños comerciales y
permiten diseños con menores dimensiones que pueden
fácilmente ser ubicados en las mismas carcasas de las
válvulas.
Referencias
[1] Takashi Miyajima, Toshinori Fujita, Kazutoshi Sakaki, Kenji
Kawashima, Toshiharu Kagawa. Development of a digital
control system for high-performance pneumatic servo valve. Precision Engineering, Volume 31, Issue 2, April 2007, Pages
156-161.
[2] Li, Y; Ang, K.H.; Chong, G.C.Y. Patents, software and hardware for PID control; an overview and analysis of the
current art. IEEE Control Systems Magazine, 26(1): pp.42-54,
2006 .
[3] Killingsworth, N.; Krstic, M. PID tuning extremum seeking: on
line, model free performance optimization. IEEE Control
Systems Magazine, 26(1): pp. 70-79, 2006.
[4] Karam M. Elbayomy, Jiao Zongxia, Zhang Huaqing. PID
Controller Optimization by GA and Its Performances on the
Electro-hydraulic Servo Control System. Chinese Journal of Aeronautics, Volume 21, Issue 4, August 2008, Pages 378-384.
[5] Sung-Mu Chin, Chung-Oh Lee, Pyung H. Chang. An
experimental study on the position control of an electrohydraulic servo system using time delay control. Control
Engineering Practice, Volume 2, Issue 1, February 1994, Pages
41-48
[6] Osornio-Rios RA, Romero-Troncoso R de J, Herrera-Ruiz G,
Castañeda-Miranda R. The application of reconfigurable logic to high speed CNC milling machines controllers. Control Eng
Pract 2008;16:674–84.
[7] Buehler. Serie 1.13.063.XXX, < www.buehlermotor.com>, 2009.
[8] National Semiconductor. DAC081S101 Data Sheet
<www.national.com>, 2009.
[9] Y.X. Su, Dong Sun, B.Y. Duan. Design of an enhanced
nonlinear PID controller. Mechatronics, Volume 15, Issue 8,
October 2005, Pages 1005-1024.
[10] John Huntington. DMX512-A, Control Systems for Live
Entertainment (Third Edition), 2007, Pages 217-230.
[11] Richard Cadena, Digital Electronics, Automated Lighting (Second Edition), 2010, Pages 147-156.
[12] Rexroth. 1X-1.13.063.XXX, Data Sheet
<www.boschrexroth.com > , 2008.
[13] S. Karunanidhi, M. Singaperumal. Design, analysis and
simulation of magnetostrictive actuator and its application to
high dynamic servo valve. Sensors and Actuators A: Physical, Volume 157, Issue 2, February 2010, Pages 185-197.
[14] S. Li, Y. Song. Dynamic response of a hydraulic servo-valve
torque motor with magnetic fluids. Mechatronics, Volume 17, Issue 8, October 2007, Pages 442-447.
[15] MATLAB, Identification ToolBox, Control Systems,
<www.mathworks.com>, 2009.
[16] FairChild Semiconductors, Datasheet TIP Series, Power Darlington Transistors <www.fairchildsemi.com>, 2009.
Currículo corto de los autores
Ernesto Carlos Capuano Zuñiga: Obtuvo el grado de
Ingeniero Electromecánico en la Universidad
Autónoma de Querétaro en el año de 2009.
Actualmente se encuentra estudiando la Maestría en
Instrumentación y Control Automático en la

CIINDET 2010
VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico,
24 al 26 de octubre de 2010, Cuernavaca Morelos, México
9
Universidad Autónoma de Querétaro. Su área de interés
es desarrollo de sistemas digitales embebidos.
Manuel García Quijada: Obtuvo el grado de Ingeniero
Electromecánico en la Universidad Autónoma de
Querétaro en el año de 2004. El grado de Maestro en
ciencias en la Universidad Autónoma de Querétaro en
el año de 2006. Actualmente es profesor investigador
en la Facultad de Ingeniería donde se desempeña como
jefe de laboratorio de manufactura avanzada.


















