Proyecto mecanico y rotico 666
17
PROYECTO MECANICO Y BOTICO TRABAJO TECNOLOGICO INCAF Cesar Julián Valderrama Aguilar Brayan león CIUDAD TOCANCIPA AÑO 2015
-
Upload
julian-aguilar -
Category
Engineering
-
view
24 -
download
1
Transcript of Proyecto mecanico y rotico 666

PROYECTO MECANICO Y BOTICO
TRABAJO TECNOLOGICO INCAF
Cesar Julián Valderrama Aguilar
Brayan león
CIUDAD TOCANCIPA
AÑO 2015

Robot
En vista de que ya existen muchos robots, es importante crear un robot que sea único y que tal vez cuente con un fin específico, como la limpieza. Los robots no necesitan asemejarse a los seres humanos en apariencia; un robot puede ser de cualquier forma o
FUTURO?
Una relación entre hombres y maquinas es un futuro muy posible de echo dependemos hoy en día de máquinas celulares todo mecánico y robotizado
COMO SERIA ESE ROBOT UNICO QUE HARIA ¡?
Algo quizá muy sencillo o algo avanzado y militar? Quizá el próximo proyecto nos lleve a una destrucción masiva si es para la milicia, pero si es para nosotros? Como los celulares o computadores innovar algo nuevo seria lo más lógico y algo que utilizaríamos en nuestra cotidianidad
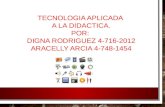
BRAZO ROBOT DE 6 EJES DE GRAN TAMAÑO ¡
El brazo robot de seis ejes es un proyecto de construcción de un brazo robot con una dimensiones superiores y que permita realizar movimientos mas precisos y fluidos. El robot se basa en la utilización de servo motores de gran tamaño y conectados a un circuito de control de servos. Finalmente se ha optado por una base de tipo ventosa que fija el robot a la mesa. También puede verse como la batería de alimentación de los servos es aprovechada como contrapeso del hombro

Robot Gusano
El robot gusano es un prototipo utilizado para el estudio del movimiento de los robots que no tienen patas ni ruedas. La realización de movimientos en este tipo de robots resulta muy complicada ya que al mover cualquier servo, se altera la posición de todos los demás. Esto quiere decir que prácticamente hay que mover todos los servos cada vez que se quiere adoptar una nueva postura. El robot esta formado por seis servos conectados a un circuito de control de servos MiniSSC. El único cable que viene del exterior es la alimentación de los servos y la conexión del puerto serie. Los movimientos de avance pueden ser bien de reptar como una serpiente mediante movimientos ondulatorios (primera foto) o bien se puede desplazar como una 'rueda' creando movimientos que hacen que todo el robot avance con solo cambiar los grados de inclinación de los servos para que este se desplace por gravedad.

SR1 Robot Multi Funcional de Desarrollo y AprendizajePor fin ya tenemos listo el primer robot de producción 100% propia y que esta pensado para ser una verdadera plataforma de aprendizaje de robótica, a la vez que posee características y funcionalidades propias de robots muy avanzados. El resultado es un robot compacto y resistente dotado de un gran número de sensores y elementos opcionales que incluyen desde cámara inalámbrica, hasta radiomodem para control remoto y todo ello en un robot que puede montar cualquiera gracias al completo manual de instrucciones y a los numerosos programas de ejemplo que incluye. El robot SR1 está disponible para la venta y tiene su propio apartado de mas información en esta sección.
COMO SE HACEN PUEDES HACER UNO PARA UN PROYECTO ESCOLAR?
Con ingenio y un poco de salvamento, hacer un robot para un proyecto de la escuela puede ser un proceso bastante simple y que ya lo puedes tener en el bolsillo.

Un viejo dispositivo a radio control puede proveerte de todas las partes necesarias para tu robot del proyecto escolar, y la base de las ruedas del vehículo RC proveerán un medio sencillo y de gran movilidad en cuanto al transporte de tu robot. Los únicos artículos que necesitarás son varias tiras de velcro y un pegamento fuerte profesional
Instrucciones
-Busca en toda tu casa por un vehículo viejo a radio control, o dirígete hacia una tienda de ladrillo y mortero o visita una tienda en línea y consigue uno barato por menos de US$10 o US$15.
-Quita los elementos innecesarios decorativos del vehículo RC, dejando al descubierto los componentes debajo. Tendrá que salvar el tablero verde, el receptor rectangular, el envoltorio negro de las baterías y el controlador que se comunica con el tablero de recepción, el cual debes mantener para controlar tu robot. El vehículo también tiene dos motores que necesitarás. También conocidos como servos, son negros y circulares en su diseño. Puedes dejarlos en su lugar como están.
-Conecta los cables que salen de los servos al tablero de recepción. Inserta cada cable dentro de puntos de inserción separados en el extremo del receptor. No coloques ambos servos en la misma zona de inserción .
-Ve por tu control y realiza una prueba de funcionamiento de tu proyecto escolar. Verifica si el robot se mueve en la forma que tu querías mientras lo mueves por medio del control. Si no lo hace, vuelve a examinar la conexión entre el tablero de recepción y los servos e inténtalo otra vez.
-Decora tu proyecto escolar si así lo deseas. Puedes utilizar algunas piezas de plástico de tu viejo automóvil RC, o objetos que tengas al alcance de tu mano, para darle un poco de instinto y personalidad a tu diseño. Puedes ajustarle estas decoraciones utilizando el pegamento profesional

Diseño y materiales
Lo primero que hay que tener en cuenta es que el robot que intentarás construir será uno muy sencillo y con un funcionamiento básico, por lo que no se debe intentar innovar o construir algo muy sofisticado, al menos si se intenta por primera vez. Los más simples son los que por su arquitectura son denominados robots móviles, cuyo movimiento está dado simplemente por una plataforma rodante. Estos robots poseen un mecanismo diferencial, que es el algoritmo más simple para controlar un robot de dos ruedas: este mecanismo permite los movimientos hacia adelante y atrás, con las ruedas girando a la misma velocidad en uno u otro sentido, o hacia derecha e izquierda, con las ruedas girando en diferentes sentidos. Los materiales para comenzar los puedes obtener de viejos juguetes que ya no se utilicen, como un auto a control remoto o similar, ya que para construir este mecanismo de control del robot se necesitan simplemente dos ruedas y dos motores. Se recomienda que las ruedas tengan un diámetro de entre 5 y 8 centímetros, y como motor se pueden utilizar los

llamados servos (se utilizarán dos motores, uno en cada rueda). También se necesitarán baterías que de ser posible sean recargables.
ISTOCKPHOTO/THINKSTOCK
Luego será necesario un microcontrolador, que es el circuito encargado de ejecutar las órdenes grabadas en su memoria o de hacer funcionar las distintas partes que constituyen el mecanismo. El proceso que se lleva a cabo en el funcionamiento puede resultar complejo, pero para ponerlo en marcha simplemente se deben colocar las partes (las ruedas, los motores y el microcontrolador) en la plataforma rodante y conectarlas con cables entre sí. El microcontrolador tiene seis canales, en los cuales se conectarán las dos ruedas, los dos motores y las baterías.

1. HERRAMIENTAS PARA ROBOTS
Ofrecemos la más amplia gama en herramientas para robots, tanto si es el robot el que lleva la pieza hacia las herramientas, como para que el mismo robot utiliza las herramientas para hacer el trabajo en la pieza.Las herramientas se caracterizan por su gran calidad y su diseño práctico, que demuestra toda la experiencia y la ingeniería de AMTRU en la fabricación de herramientas para robots.
Herramientas para limpiar fundición. Herramientas para eliminar rebabas. Herramientas para acabado de superficies. Accesorios, como por ej. cambio rápido, soportes, etc.
Una herramienta se utiliza como actuador final en aplicaciones en donde se exija al robot realizar alguna operación sobre la pieza de trabajo. Estas aplicaciones incluyen la soldadura por puntos, la soldadura por arco, la pintura por pulverización y las operaciones de taladro. En cada caso, la herramienta particular está unida a la muñeca del robot para realizar la operación.
2. Herramientas
En muchas ocasiones el robot ha de realizar operaciones que no consisten en manipular objetos, sino que implica el uso de una herramienta. Aparte de estos elementos de sujeción y herramientas más o menos convencionales, existen interesantes desarrollos e investigaciones, muchos de ellos orientados a la manipulación de objetos complicados y delicados. Por ejemplo pinzas dotadas de tacto.

Herramientas terminales para robots
Tipo Comentarios
Pinza soldadura por puntosSoplete soldadura de arcoCucharón para coladaAtornilladorFresa-lijaPistola de pinturaCañón láserCañón de agua a presión
Dos electrodos que se cierran sobre la pieza de soldarAportan el flujo de electrodo que se fundePara trabajos de fundiciónSuelen incluir la alimentación de tornillosPara perfilar, eliminar rebabas, pulir, etcPara pulverización de la pinturaPara corte de materiales, soldadura o inspecciónPara corte de materiales
2IntroducciónPara las aplicaciones industriales, las capacidades del robot básico deben aumentarse por medio de dispositivos adicionales. Podríamos denominar a estos dispositivos como los periféricos del robot. En robótica, el termino de actuador final se utiliza para describir la mano o herramienta que está unida a la muñeca. El actuador final representa la herramienta especial que permite al robot de uso general realizar una aplicación particular, y debe diseñarse específicamente para dicha aplicación.Los actuadores finales pueden dividirse en dos categorías:
pinzas ( gripper ) herramientas

Las pinzas se utilizan para tomar un objeto, normalmente la pieza de trabajo, y sujetarlo durante el ciclo de trabajo del robot. Hay una diversidad de métodos de sujeción que pueden utilizarse, además de los métodos mecánicos obvios de agarre de la pieza entre dos o más dedos. Estos métodos suplementarios incluyen el empleo de casquetes de sujeción, imanes, ganchos, y cucharas.
El accionamiento neumático es él mas utilizado por ofrecer mayores ventajas en simplicidad, precio y fiabilidad, aunque presenta dificultades de control de posiciones intermedias. En ocasiones se utilizan accionamientos de tipo eléctrico.En la pinza se suelen situar sensores para detectar el estado de la misma (abierto o cerrado). Se pueden incorporar a la pinza otro tipo de sensores para controlar el estado de la pieza, sistemas de visión que incorporen datos geométricos de los objetos, detectores de proximidad, sensores fuerza par, etc.
Existen ciertos elementos comerciales que sirven de base para la pinza, siendo posible a partir de ellos diseñar actuadores válidos para cada aplicación concreta. Sin embargo, en otras ocasiones el actuador debe ser desarrollado íntegramente, constituyendo un porcentaje importante dentro del coste total de la aplicación.
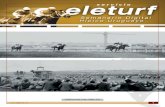
AUTO ROBOTICO – BRAZO ROBOTICO

Introducción del productor

Desde la creación, nuestra empresa ha estado comprometida con la innovación y el
desarrollo de máquinas CNC, constantemente tratando de construir nuestras propias
marcas. Hemos desarrollado T32, T36 y T40 tornos CNC, K7250, k714 y K715 fresadoras C
NC y centros de mecanizado V7250.
En los últimos años, hemos diseñado de alta precisión centros de mecanizado como
VM850 y VM1060, VS655 fresadoras y tornos CLX400 inclinado. Hemos cooperado con la
universidad de Tsinghua en el desarrollo de VS655 cinco ejes fresadoras y máquinas
MMC740 alta vertical. Nuestros productos se titulado como productos de innovación por
Nanjing comisión oficina de la ciencia y la tecnología y comercio de la provincia de Jiangsu
en 2008. Nuestra empresa tiene más de 10,000 metros cuadrados de área de producción.
Características

1. Flexible y fiable
2. Perfecta característica
3. Industrial de alta precisión robot
4. Seis ejes robot industrial
5. ISO9001 sistema de calidad
COTIZACION
PRESIO: US $10000-25000
PAIS DE: SHANGHAI
CANTIDAD DE PEDIDO MINIMA 1SET/s
CAPACIDAD DE SUMINISTRO: 25 SET/s POR MES