PROYECTO FIN DE CARRERA Monitorización de...
123
PROYECTO FIN DE CARRERA Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg Autor: Daniel Cortés Benítez Titulación: Ingeniería Aeronáutica Tutor: Fernando A. Lasagni Cotutor: Sergio González López
Transcript of PROYECTO FIN DE CARRERA Monitorización de...

PROYECTO FIN DE CARRERA
Monitorización de estado estructural
mediante sensores de fibra óptica tipo
redes de Bragg
Autor: Daniel Cortés Benítez
Titulación: Ingeniería Aeronáutica
Tutor: Fernando A. Lasagni
Cotutor: Sergio González López
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
2
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
3
ÍNDICE
1. INTRODUCCIÓN ................................................................................................................... 6
2. OBJETIVOS Y MOTIVACIONES .............................................................................................. 7
3. ESTADO DEL ARTE ................................................................................................................ 9
3.1 SENSORES FBG ........................................................................................................................ 9
3.2 MONITORIZACION DE ESTADO ESTRUCTURAL ............................................................................... 18
3.3 ESTUDIOS REALIZADOS CON FBGS .............................................................................................. 22
4. PLAN DE ENSAYOS ............................................................................................................. 36
4.1 MATERIALES ......................................................................................................................... 36
4.2 EQUIPAMIENTO .................................................................................................................... 41
4.3 ENSAYOS ............................................................................................................................. 55
4.3.1 ENSAYOS MECÁNICOS A TRACCIÓN......................................................................................... 57
4.3.2 ENSAYOS MECÁNICOS A FLEXIÓN ........................................................................................... 69
4.3.3 EMBEBIDO DE SENSORES FBG DURANTE LA FABRICACIÓN DE UN PANEL DE MATERIAL COMPUESTO ..... 73
5. PUESTA A PUNTO............................................................................................................... 80
5.1 ESTUDIO DE OPTIMIZACIÓN PARA ARAMIS .................................................................................. 80
5.2 ESTUDIO DE EXCENTRICIDAD DE LAS MORDAZAS DE LA MÁQUINA ZWICK ........................................... 85
5.3 ENSAYO PRELIMINAR PARA LA PUESTA A PUNTO DEL INTERROGADOR ÓPTICO SM130.......................... 86
6. RESULTADOS Y DISCUSIÓN ................................................................................................ 89

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
4
6.1 ENSAYOS MECÁNICOS A TRACCIÓN ............................................................................................ 89
6.2 ENSAYOS MECÁNICOS A FLEXIÓN ............................................................................................ 111
6.3 EMBEBIDO DE SENSORES FBG DURANTE LA FABRICACIÓN DE UN PANEL DE MATERIAL COMPUESTO ...... 117
7. CONCLUSIONES Y DESARROLLOS FUTUROS .................................................................... 119
8. REFERENCIA BIBLIOGRÁFICA ........................................................................................... 122
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
5
AGRADECIMIENTOS
Antes de empezar me gustaría mostrar mi más humilde agradecimiento a las personas que
con su ayuda han hecho posible la consecución de este proyecto.
En primer lugar, agradecer la confianza que el centro tecnológico FADA-CATEC depositó en
mí para llevar a cabo el desarrollo de este proyecto, la cual me ha permitido disfrutar de una
grata primera experiencia laboral. Especial mención merecen mis tutores Dr. Fernando A.
Lasagni y Sergio González por su generosa dedicación y su gran labor a la hora de guiarme
durante el transcurso del mismo.
En segundo lugar, debo destacar la contribución de Rosario Fernández y Nicolás Gutiérrez
por haber estado ahí en todo momento compartiendo horas de trabajo conjunto. Así mismo
considero necesario mencionar el buen ambiente de trabajo vivido durante este periodo de
seis meses, fruto de las grandes personas y profesionales que componen el departamento
de Materiales y Procesos de dicho centro tecnológico.
No puedo olvidarme tampoco de los profesores que durante estos años de carrera me han
transmitido sus conocimientos colaborando así en mi formación profesional.
Por último, agradecer el apoyo prestado durante este largo camino a mis seres queridos y
sin el cual me hubiera sido difícil en ocasiones seguir adelante.
Es increíble que después de estos años de duro trabajo por fin esté escribiendo los
agradecimientos de mi proyecto fin de carrera.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
6
1. INTRODUCCIÓN
El objetivo principal del presente proyecto es la puesta a punto del interrogador óptico
sm130 que será posteriormente utilizado en el análisis comparativo de la actitud de los
sensores de fibra óptica tipo redes de Bragg, FBGS (acrónimo de la lengua inglesa: Fiber
Bragg Grating Sensors) frente a diversos métodos tradicionales de medida de
deformaciones, en su aplicación para la monitorización de estado estructural, SHM
(acrónimo de la lengua inglesa: Structural Health Monitoring).
En primer lugar se presentan los objetivos y las motivaciones que han dado lugar a la
realización del presente proyecto. Seguidamente se explica en el estado del arte el
fundamento de esta novedosa técnica así como el estado actual de su desarrollo
mencionando diferentes estudios realizados hasta hoy.
El siguiente bloque representa el grueso del documento. Se presenta en él la campaña de
ensayos realizados con dos tipos de materiales distintos: aluminio y material compuesto
carbono/epoxi, aunque el peso de los ensayos recae notablemente sobre el segundo. Así
mismo se explica brevemente cada uno de los equipos de medida utilizados detallando sus
principales características técnicas.
Antes de discutir los resultados obtenidos, se hace reseña a varias pruebas de verificación
encuadradas dentro de la puesta a punto de diferentes equipos empleados durante el
proyecto. Tras discutir los resultados obtenidos en los diferentes ensayos, se mencionan las
conclusiones extraídas en este estudio haciendo notar las líneas de investigación futuras
necesarias para seguir profundizando en el desarrollo de esta prometedora técnica.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
7
2. OBJETIVOS Y MOTIVACIONES
Una de las grandes revoluciones que se han producido durante las últimas dos décadas en el
sector de la aviación ha sido la incorporación de los materiales compuestos (o composites) al
diseño y construcción. La evolución hacia el composite se debe a un aumento en los
conocimientos físicos y de comportamiento del material que la industria aeronáutica ha
adquirido sobre él. Entre sus numerosas ventajas destacan sus altas características
mecánicas específicas, posibilidad de diseño a medida, alta resistencia ante agentes
químicos, buen comportamiento frente al fuego y a fatiga, resistencia a la corrosión y lo que
es más importante, el ahorro en peso que supone su uso.
A mediados de los 80 las grandes compañías del sector aeronáutico deciden apostar por el
desarrollo e incorporación de piezas de composite a sus aviones. El avance ha aumentado
existiendo en la actualidad prototipos con un peso estructural de material compuesto
cercano al 50 %, como es el caso del A380 de la compañía Airbus, Figura 1, donde se observa
la distribución de diferentes materiales empleados en su fabricación.
Figura 1. Uso de composites. A380

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
8
Al mismo tiempo surge la idea de monitorización de estado estructural, práctica que consiste
en monitorizar una estructura en todo su ciclo de vida con el fin de detectar cambios en sus
propiedades estructurales que indiquen una disminución en su rendimiento. Para ello se
distribuye, sobre la estructura a monitorizar, una serie de sensores capacitados para medir
las magnitudes físicas deseadas.
Recientemente se está estudiando la posibilidad de emplear sensores de fibra óptica tipo
redes de Bragg como sensores de deformación, temperatura y presión. Las cualidades de
estos sensores y su posibilidad de integración en estructuras de material compuesto los
capacita para esta labor, aunque se trata de una tecnología aún en fase de estudio y
desarrollo.
La ejecución de este proyecto supone la fase de inicio dentro un estudio más profundo
gestionado por el Centro Andaluz de Tecnologías Aeroespaciales, con el que se pretende
jugar un papel importante en el desarrollo de los sensores FBG y su aplicabilidad a la
monitorización de “salud” estructural en futuros componentes de aeronaves.
Como objetivos dentro de esta fase inicial, y que ocupa la extensión del presente proyecto,
se encuadran la tarea de puesta a punto del interrogador óptico sm130, equipo utilizado
para analizar la respuesta de sensores de fibra óptica ante diversas excitaciones, así como
una primera fase de ensayos mecánicos con los que se pretende comparar la respuesta de
estos sensores frente a sistemas de medidas tradicionales.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
9
3. ESTADO DEL ARTE
En esta revisión bibliográfica se demuestra que los sensores de fibra óptica tipo redes de
Bragg tienen un alto potencial en su aplicación como sensor de diferentes magnitudes físicas
tales como deformaciones, temperatura, presión, etc, existiendo actualmente en el mercado
diversos equipos de lectura automatizados para ser empleados tanto en laboratorio como
en estructuras reales.
Se contemplará la necesidad de aplicación de esta nueva tecnología en las actuales
estructuras de materiales compuestos con el fin de sustituir a los elementos de medida
tradicionales utilizados en la monitorización del estado estructural, especialmente en el
sector aeronáutico y aeroespacial. Así mismo, se presentarán algunos ejemplos de aplicación
reciente.
No obstante, para una aplicación generalizada de FBGS, es necesario realizar aún una gran
cantidad de ensayos simulando las condiciones operativas a las que estarán expuestas en su
vida real, para entender mejor su respuesta y estudiar su impacto estructural en el material
huésped.
3.1 SENSORES FBG
Existen una gran variedad de sensores indicados para medir deformaciones y temperaturas
entre los que destacan tres tipos: ópticos, electromagnéticos y electromecánicos. En el
desarrollo de este proyecto se trabaja con el primer tipo de sensor mencionado. Este
presenta, entre otras ventajas, la posibilidad de ser integrado en materiales compuestos, en
los cuales se centran los objetivos de este proyecto.
La fibra óptica suele estar compuesta por un núcleo central de vidrio óptico (SiO2) de
diámetro entre 5 µm y 10 µm, una corteza del mismo material de hasta 125 µm y un
revestimiento de hasta 250 µm, este último es distinto dependiendo del material sobre el

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
10
que va a ser utilizado y la temperatura de aplicación, Figura 2. Se utilizan revestimientos de
acrilato o poliimida para proteger la fibra óptica, especialmente frente al agua o al
hidrógeno, que pueden favorecer el crecimiento de posibles grietas afectando así a la
estabilidad mecánica de la fibra.
Figura 2. Composición Fibra Óptica
Estas dimensiones son relativamente grandes si se piensa en embeber la fibra óptica en
material compuesto. Por ejemplo, el diámetro de una fibra de carbono está comprendido
entre valores de 5 a 10 µm. Se están desarrollando sensores de fibra óptica miniaturizados
que no superan las 50 µm de diámetro con el fin de minimizar el posible efecto adverso
sobre el material huésped [SAT 2002].
La diferencia de índice de refracción entre el núcleo y la corteza hace que la luz, procedente
de una fuente, viaje a lo largo del núcleo. De este modo, se pueden recorrer grandes
distancias sin pérdida significativa de intensidad. Esta pérdida sólo es apreciable para valores
de radio de curvatura por debajo de 30 mm o cuando está sometida a fuerzas transversales
significativas.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
11
Aunque la fibra óptica aún no es capaz de competir completamente con las galgas
extensométricas en cuanto a precio y precisión se refiere, presentan algunas cualidades que
las hacen muy adecuadas según su aplicación:
• Bajo peso y volumen.
• Buena integración en materiales compuestos.
• Capacidad de medir directamente parámetros como deformación o temperatura.
• Eléctricamente pasivo.
• Inmune a radiaciones magnéticas.
• Buena resistencia a corrosión y fatiga. Larga vida.
• Capacidad de medir grandes deformaciones (>10000 µm/m) y trabajar en un amplio
rango de temperaturas (4 K - 950 K).
• Alta sensibilidad y amplio ancho de banda.
• Fácil de instalar.
• Posibilidad de multiplexación.
Por supuesto también existen aspectos en los que la fibra óptica muestra ciertas debilidades:
• Fragilidad de la fibra. El radio de curvatura de la fibra debe ser mayor de 10 mm.
• Necesidad de equipos interrogadores.
• Muestra alta dependencia con la temperatura. (Δλ/λ causado por 1 oC es equivalente
al causado por 8 µm/m). Necesidad de compensar el efecto de la temperatura.
Los sensores ópticos usados hoy en día son los llamados Fabry-Perot (basados en
interferometría) y las redes de Bragg (basados en difracción múltiple) [MEN 1999]. Puesto
que este último será el utilizado en el desarrollo del proyecto, se entrará en cuestión sobre
su funcionamiento.
Una red de Bragg consta de una serie de franjas grabadas en el núcleo de la fibra óptica con
el fin de que el índice de refracción no sea constante sino que varíe periódicamente a lo
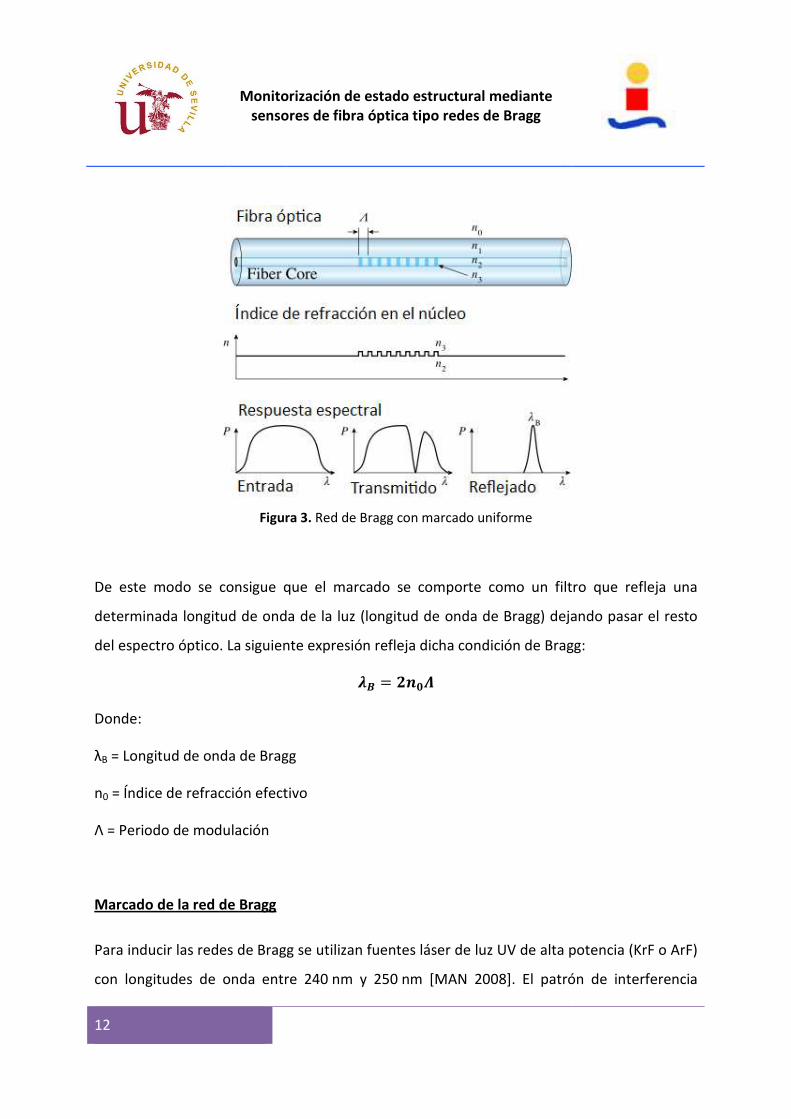
largo de la longitud del marcado, Figura 3.
Monitorización de estado estructural mediante sensores
12
Figura
De este modo se consigue que el marcado se comporte como un filtro que refleja una
determinada longitud de onda de la luz (longitud de onda de Bragg) dejando pasar el resto
del espectro óptico. La siguiente expresión refleja dicha condición de Bragg:
Donde:
λB = Longitud de onda de Bragg
n0 = Índice de refracción efectivo
Λ = Periodo de modulación
Marcado de la red de Bragg
Para inducir las redes de Bragg se utilizan fuentes láser de luz UV de alta potencia (KrF o ArF)
con longitudes de onda entre 240
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
Figura 3. Red de Bragg con marcado uniforme
De este modo se consigue que el marcado se comporte como un filtro que refleja una
determinada longitud de onda de la luz (longitud de onda de Bragg) dejando pasar el resto
La siguiente expresión refleja dicha condición de Bragg:
�� � ����
= Longitud de onda de Bragg
= Índice de refracción efectivo
Para inducir las redes de Bragg se utilizan fuentes láser de luz UV de alta potencia (KrF o ArF)
de onda entre 240 nm y 250 nm [MAN 2008]. El patrón de interferencia
De este modo se consigue que el marcado se comporte como un filtro que refleja una
determinada longitud de onda de la luz (longitud de onda de Bragg) dejando pasar el resto
La siguiente expresión refleja dicha condición de Bragg:
Para inducir las redes de Bragg se utilizan fuentes láser de luz UV de alta potencia (KrF o ArF)
nm [MAN 2008]. El patrón de interferencia
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
13
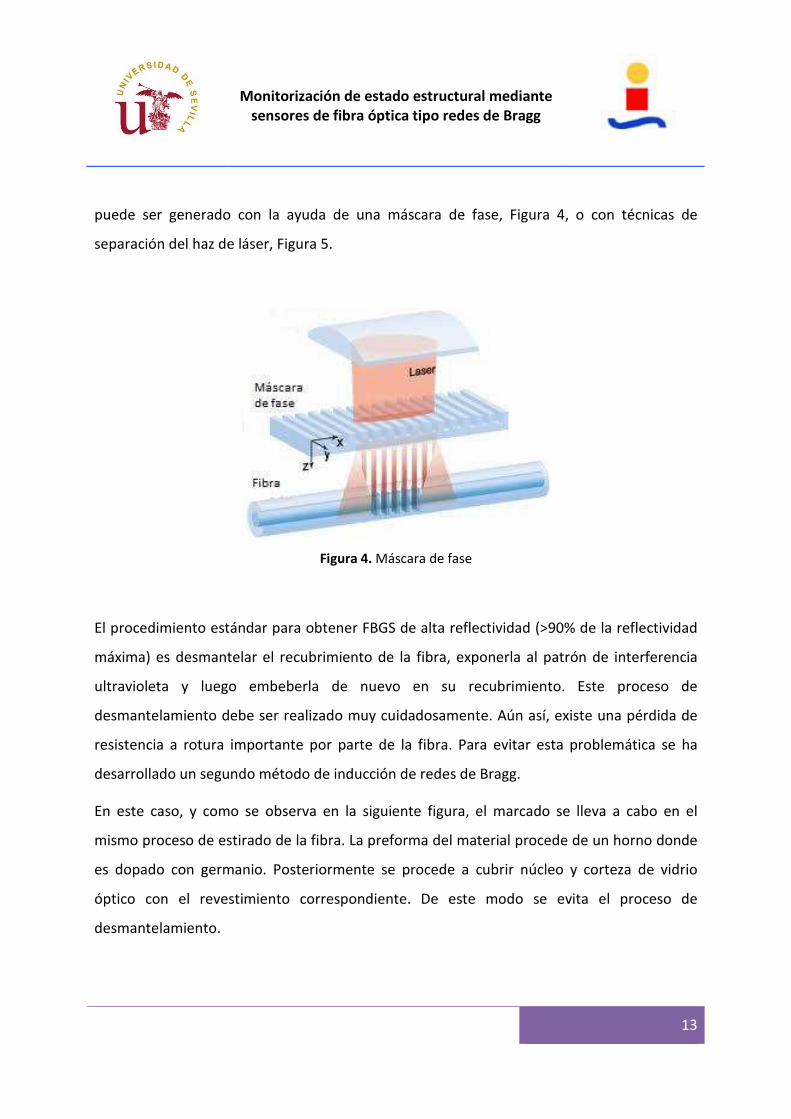
puede ser generado con la ayuda de una máscara de fase, Figura 4, o con técnicas de
separación del haz de láser, Figura 5.
Figura 4. Máscara de fase
El procedimiento estándar para obtener FBGS de alta reflectividad (>90% de la reflectividad
máxima) es desmantelar el recubrimiento de la fibra, exponerla al patrón de interferencia
ultravioleta y luego embeberla de nuevo en su recubrimiento. Este proceso de
desmantelamiento debe ser realizado muy cuidadosamente. Aún así, existe una pérdida de
resistencia a rotura importante por parte de la fibra. Para evitar esta problemática se ha
desarrollado un segundo método de inducción de redes de Bragg.
En este caso, y como se observa en la siguiente figura, el marcado se lleva a cabo en el
mismo proceso de estirado de la fibra. La preforma del material procede de un horno donde
es dopado con germanio. Posteriormente se procede a cubrir núcleo y corteza de vidrio
óptico con el revestimiento correspondiente. De este modo se evita el proceso de
desmantelamiento.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
14
Figura 5. Marcado en vacío
Fundamento físico
En la medición de deformaciones y temperaturas se persigue el corrimiento del pico del
espectro óptico reflejado en el FBGS, Figura 6.
Figura 6. Desplazamiento de longitud de onda de Bragg
Una gran ventaja de los sensores de Bragg es que son capaces de medir deformaciones
absolutas que, además, no varían con el tiempo. Al aplicar una deformación uniforme a la

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
15
red ya sea por esfuerzo mecánico, por dilatación térmica o por ambas combinadas, se
modifica su periodo. Esto hace que se observe un desplazamiento del valor de longitud de
onda de Bragg (longitud de onda reflejada por la red) proporcional a la deformación de la
misma. Esta propiedad capacita al sensor de Bragg para que, pegado o embebido
correctamente sobre el material, pueda comportarse como sensor local de deformaciones.
La longitud de onda de Bragg cambia con la deformación y la temperatura de acuerdo a la
siguiente ecuación:
� � � ∗ + �� ∗ �� (��. �)
Donde:
Δλ = Variación de longitud de onda de Bragg
λ0 = Longitud de onda de referencia al inicio del ensayo
k = Factor de galga; � � 1 − �
p = Coeficiente fotoelástico
ε = Deformación
αδ = Variación en el índice de refracción; �� � �� �⁄��
ΔT = Variación de temperatura en K
El primer término a la derecha de la igualdad en Ec. 1 engloba el efecto causado por la
deformación mecánica y por la dilatación térmica del material (Ec. 2), mientras que el
segundo indica el cambio producido en el índice de refracción de la fibra óptica por el efecto
sólo de la temperatura.
� � + � (��. �)
εm = Deformación mecánica

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
16
εT = Dilatación térmica; � � � ! ∗ ��
αsp = Coeficiente de expansión térmica del material huésped
La ecuación inicial queda de la siguiente manera:
� � � ∗ " � + � ! ∗ ��# + �� ∗ �� (��. $)
Como se ha mencionado con anterioridad, la fibra óptica muestra una alta dependencia con
la temperatura. Si se desea obtener deformación propia del material sobre el que es
integrado el sensor FBG, es necesario por tanto emplear técnicas de compensación de
temperatura para eliminar el efecto de ésta sobre el índice de refracción de la fibra óptica.
Dos son los métodos más extendidos:
• Si se conoce un punto de deformación nula, se compensa la medición de
deformación real con la medición de un sensor situado en tal punto cuya
ecuación simplificada con εm=0 es la siguiente:
�%% � "� ∗ � ! + ��# ∗ �� (��. &)
La deformación mecánica viene determinada por la siguiente expresión:
� � 1� ∗ '��� − �%% ( (��. ))
Donde:
Δλm = Variación de longitud de onda del sensor FBG de medida de deformación
λ0m = Longitud de onda de referencia del sensor FBG de medida de deformación
Δλc = Variación de longitud de onda del sensor FBG de compensación
λ0c = Longitud de onda de referencia del sensor FBG de compensación

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
17
• Si no se da esta condición, se debe utilizar una medida pura de temperatura. Para
ello se fija un sensor FBG por un punto situado medianamente lejos de la red de
Bragg de modo que éste quede al aire y libre de deformaciones mecánicas. De
este modo, el incremento de longitud de onda detectado en este sensor (Eq. 6)
corresponde al efecto que tiene la temperatura sobre él (dilatación térmica de la
fibra óptica y cambio en el índice de refracción de su núcleo).
��� � "� ∗ �*+, + ��# ∗ �� (��. -)
ΔλT = Variación de longitud de onda del sensor FBG de medida de temperatura
λ0T = Longitud de onda de referencia del sensor FBG de medida de temperatura
αglass = Coeficiente de expansión térmica de la fibra óptica
Despejando la deformación mecánica de la Eq. 3 y habiendo sustituido el valor del
incremento de temperatura (ΔT) obtenido en la Eq. 6 llegamos a la siguiente
expresión:
� � 1� ∗ .��� − ��� ∗ / � ∗ � ! + ��� ∗ �*+, + ��01 (��. 2)
Equipos de medida
En la detección del pico reflejado puede ser utilizado un analizador óptico de espectros junto
con una fuente de luz de banda ancha que emita la señal lumínica. No obstante existen en la
actualidad multitud de dispositivos automatizados disponibles en el mercado. Mientras que
hace unos años eran equipos voluminosos, pesados, lentos y muy poco automatizados, el
constante desarrollo de esta tecnología ha permitido que hoy en día se cuente con sistemas
que, siendo capaces de medir a frecuencia de hasta 2 KHz, puedan ser embarcados para la

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
18
monitorización en vuelo por su bajo peso y pequeño tamaño. Algunos de estos equipos se
observan en la Figura 7.
(a) (b)
(c)
Figura 7. (a) sm130 de Micron Optics [www01], (b) FBG scan 804 de FBGS [www02], (c) DI410 de HBM [www03]
Se trata de dispositivos de campo dinámicos con cuatro canales a disposición. Los distintos
dispositivos de medición optoelectrónicos que comercializan estas compañías nombradas,
así como otro tanto de ellas, se diferencian principalmente en tres aspectos: láser de barrido
(estático o dinámico), número de canales y frecuencia de adquisición.
3.2 MONITORIZACION DE ESTADO ESTRUCTURAL
Actualmente, la mayor parte de las tareas de mantenimiento de estructuras o sistemas de
transporte se centra en la monitorización estructural. Sólo una pequeña parte debiera

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
19
corresponder a reparación pues en multitud de casos esta tarea resulta muy costosa o
incluso imposible de realizar.
Si se particulariza en el sector aeronáutico, la monitorización de aeronaves se realiza hoy en
día en casi todas las flotas en tierra, con sistemas muy costosos de ensayos no destructivos
(NDT), en intervalos prescritos y a tiempos fijos. Este mantenimiento se basa en condiciones
severas de vuelo pero no todos los aviones están sometidos siempre a estas cargas tan
severas. Es por ello que desde hace décadas se instalan en aeronaves sistemas de
monitorización estructural. A partir de los años 80 este desarrollo estuvo encaminado en
sensores extensométricos que miden las cargas en varios puntos claves del avión. De esta
manera se puede conocer el estado de fatiga propio de la aeronave adaptando el ciclo de
mantenimiento a sus necesidades. Aún así no son capaces de detectar daño existente en la
estructura.
Hoy en día, para la monitorización de cargas en aviones militares, se utilizan sensores
eléctricos tipo galgas extensométricas [ARM 1988]. Éstos han demostrado su buen
funcionamiento en las últimas décadas, pero han puesto también de manifiesto los
problemas que supone dicha monitorización mediante sensores eléctricos en ambientes
húmedos o con fuerte interacción electromagnética. Ejemplos de aplicación de galgas
extensométricas para la monitorización estructural se muestran en la Figura 8 con el avión
militar Harrier II y en la Figura 9 con el Eurofighter EF 2000.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
20
Figura 8. SHM mediante galgas extensométricas
Figura 9. SHM en 16 puntos de medida con galgas extensométricas
La utilización de FBGS para monitorización estructural se encuentra aún en fase de estudio y
desarrollo. Se está acudiendo a esta tecnología por las múltiples ventajas que exhiben en su
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
21
uso en materiales compuestos, materiales que se presentan como el futuro de las nuevas
estructuras ya no sólo en el mundo aeronáutico, sino en multitud de sectores como pueden
ser el de la industria aeroespacial (vehículos reutilizables, módulo de rescate de la ISS), la
industria energética (aerogeneradores, plantas de potencia, transformadores), el sector
ferroviario (raíles), la ingeniería civil (minería del carbón, exploración de gas y petróleo) o la
ingeniería naval (barcos de altas prestaciones).
Existen diversos campos donde los sensores de fibra óptica están reemplazando a los
sistemas de medida basados en galgas extensométricas. Sin embargo, aún no existe ningún
caso en el cual se usen FBGS para la monitorización de deformaciones en vehículos
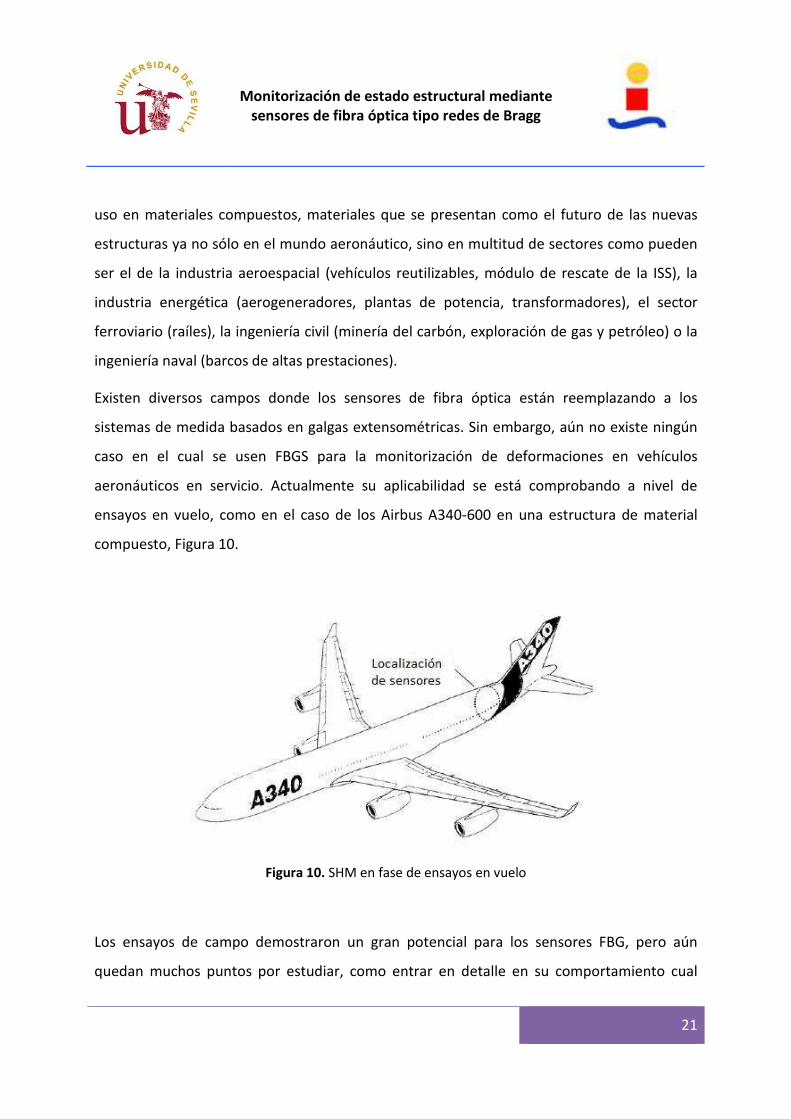
aeronáuticos en servicio. Actualmente su aplicabilidad se está comprobando a nivel de
ensayos en vuelo, como en el caso de los Airbus A340-600 en una estructura de material
compuesto, Figura 10.
Figura 10. SHM en fase de ensayos en vuelo
Los ensayos de campo demostraron un gran potencial para los sensores FBG, pero aún
quedan muchos puntos por estudiar, como entrar en detalle en su comportamiento cual

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
22
sensor y en el impacto que puede ocasionar en las propiedades del material huésped en
diferentes condiciones de vida operativa, hasta que su uso se haga generalizado en
estructuras de aviones comerciales.
3.3 ESTUDIOS REALIZADOS CON FBGS
A continuación se mencionan diferentes estudios que han surgido con el desarrollo de esta
nueva tecnología, pasando desde las aplicaciones básicas para los que los sensores de fibra
óptica han sido pensados (medición de deformaciones y temperatura) hasta otras con
objetivos ligeramente diferentes pero al alcance de las cualidades de estos sensores
(detección de gases en el ambiente, monitorización de la corrosión en aceros, etc.).
Estudios comparativos con sensores convencionales en vistas a demostrar la fiabilidad del
FBGS
Sin duda alguna el primer paso es demostrar que las medidas ofrecidas por sensores de fibra
óptica tienen un grado de fiabilidad equitativo al de sensores de extensometría
tradicionales.
Numerosos son los estudios que se han encontrado sobre esta temática, entre los que cabe
destacar los realizados por [MAL 2006]. Se realizan test mecánicos de tracción sobre una
serie de probetas extraídas de un panel del material carbono epoxi AS4/8552. Como
elementos de medida se emplean, aparte de un sensor FBG pegado sobre la superficie y otro
embebido en la probeta, una galga extensométrica y un extensómetro situado en la zona de
medida. El resultado para una de las probetas ensayadas se presenta en la Figura 11, donde
se puede comprobar una buena concordancia entre todos los valores, habiendo obtenido
para la carga última una diferencia de aproximadamente 0,1 % entre el sensor FBG

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
23
embebido y la galga extensométrica, y una diferencia en torno al 1 % con respecto al
extensómetro.
Figura 11. Carga vs Deformación en diferentes elementos de medida
Seguidamente se lleva a cabo una serie de ensayos de compresión a temperatura ambiente
sobre paneles rigidizados instrumentados con sensores FBG y galgas extensométricas. Los
resultados son en todo momento aceptables hasta que se produce el pandeo del
revestimiento que induce torsión y flexión en los larguerillos. Los sensores de Bragg
funcionan perfectamente durante todo el ensayo hasta que llegada la carga de rotura de la
estructura se produce el fallo, en la mayoría de los casos por el empalme entre la zona del
sensor y la propia fibra.
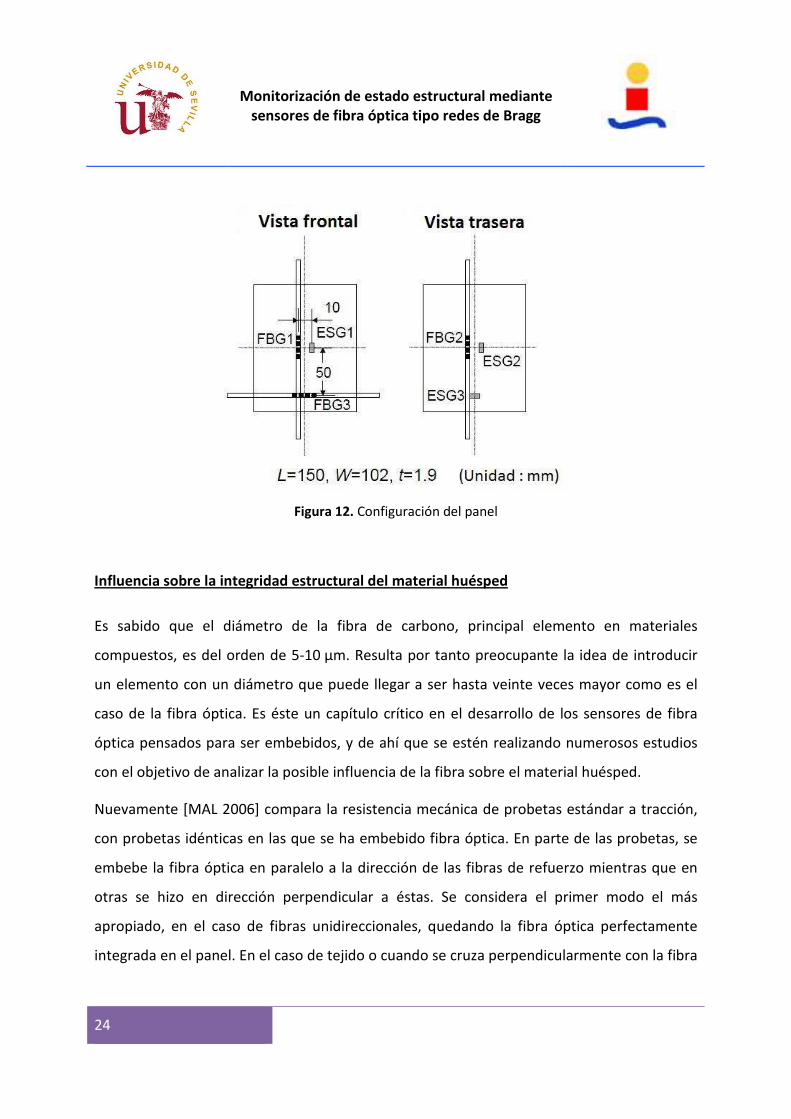
Un estudio similar a cargo del departamento de Ingeniería Aeroespacial del Instituto
Avanzado de Ciencia y Tecnología de Corea [CHA] concluye en los mismos resultados,
estando el panel instrumentado tal y como se observa en la Figura 12.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
24
Figura 12. Configuración del panel
Influencia sobre la integridad estructural del material huésped
Es sabido que el diámetro de la fibra de carbono, principal elemento en materiales
compuestos, es del orden de 5-10 µm. Resulta por tanto preocupante la idea de introducir
un elemento con un diámetro que puede llegar a ser hasta veinte veces mayor como es el
caso de la fibra óptica. Es éste un capítulo crítico en el desarrollo de los sensores de fibra
óptica pensados para ser embebidos, y de ahí que se estén realizando numerosos estudios
con el objetivo de analizar la posible influencia de la fibra sobre el material huésped.
Nuevamente [MAL 2006] compara la resistencia mecánica de probetas estándar a tracción,
con probetas idénticas en las que se ha embebido fibra óptica. En parte de las probetas, se
embebe la fibra óptica en paralelo a la dirección de las fibras de refuerzo mientras que en
otras se hizo en dirección perpendicular a éstas. Se considera el primer modo el más
apropiado, en el caso de fibras unidireccionales, quedando la fibra óptica perfectamente
integrada en el panel. En el caso de tejido o cuando se cruza perpendicularmente con la fibra

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
25
óptica el laminado unidireccional, se forman bolsas de resina delante y detrás de la fibra,
Figura 13, que son causa de un deterioro en las propiedades mecánicas del material.
Figura 13. (a) f.o. a 0o, (b) f.o. a 90o
En la Figura 14 se presenta una comparación porcentual de los valores medios de resistencia
a tracción obtenidos. Las columnas de error muestran la desviación estándar de las
probetas.
Figura 14. Tabla de resultados

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
26
En el caso de laminados unidireccionales a 0o, con fibra óptica embebida a 0o respecto al
refuerzo, no se aprecia diferencias significativas. Con fibra óptica embebida a 90o se observa
a priori un hecho incoherente. La resistencia a tracción se incrementa un 8 % cuando es de
esperar un descenso notable de esta pues se trata del caso más desfavorable. La razón de
este incremento pudiera ser una influencia positiva de la fibra óptica en el mecanismo de
rotura de la probeta.
En el caso de las probetas a 90o, se observa una disminución del 11 % en la resistencia, pero
la desviación estándar alta en torno al 16 % de las probetas sin fibra óptica hace que no se
pueda establecer claramente una influencia real significativa.
Para las probetas a ±45o se advierte rápidamente que la fibra óptica no tiene influencia
ninguna pues los valores medios son casi idénticos teniendo una desviación estándar baja.
En las probetas multidireccionales se puede apreciar un leve aumento de resistencia pero los
resultados están prácticamente dentro del mismo rango de la desviación estándar de los
valores de resistencia.
En los ensayos a compresión se contemplan tres casos diferentes de probetas en las cuales
se embebe fibra óptica de distinta forma aunque siempre perpendicularmente a la dirección
de la fibra de refuerzo, Figura 15.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
27
Figura 15. (a) “ribbon”, (b) f.o. individual, (c) 4 f.o. individuales
El caso (a), fibra óptica embebida en forma de “ribbon”, es el que presenta mayor caída de
resistencia, reduciendo su valor hasta la mitad lo cual deja entrever una clara influencia
negativa sobre las propiedades del material huésped. En los casos (b) y (c) se observa un
comportamiento similar, presentando en ambos casos una caída de resistencia en torno al
16 %.
Ensayos bajo cargas de impacto
Las estructuras de material compuesto presentan una gran desventaja. Aunque son capaces
de soportar bien las cargas de impacto por su alta capacidad para absorberlas, su resistencia
tras el golpe se ve considerablemente disminuida debiendo, en la mayoría de los casos, dar
por perdida la estructura. De ahí la vital importancia de detectar las cargas de impacto y
analizar el daño que ha sufrido la estructura.
Hoy en día, estas técnicas se realizan con galgas extensométricas y sensores piezoeléctricos.
Teniendo en cuenta las limitaciones que tienen estos sensores eléctricos en ambientes
(a) (b)
(c)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
28
corrosivos o con fuerte radiación electromagnética, y dado que su integración en grandes
estructuras para la monitorización conlleva una compleja y extensa red de cableado,
aparecen en escena los sensores de fibra óptica tipo red de Bragg con el fin de superar estas
dificultades.
[HIR 2006] impacta un panel de carbono-epoxi con un sensor FBG y una galga
extensométrica pegados sobre la superficie en una zona cercana al impacto. Las medidas de
deformación recogidas se representan frente al tiempo en la Figura 16.
Figura 16. Tiempo vs Deformación. SG vs FBGS
Se observa una buena concordancia entre ambas medidas. La máxima deformación a
tracción para el sensor y la galga es de 204 y 208 µε, y el máximo en compresión de 99 y
97 µε, respectivamente.
Nótese el nivel de ruido de ambas señales. El ruido de fondo es mucho mayor en la galga
extensométrica que en el sensor FBG. Se observa en la señal de la galga, dos picos en valores
de tiempo de -0,014 y 0,14 s. Por otra parte, aparece repentinamente una gran fluctuación a

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
29
los 0,09 s solo en la galga. Estos ruidos considerables pueden ser debido a interferencia
electromagnética. Tomando por definición para la deformación mínima detectable la media
cuadrática de los valores de la señal grabados antes del impacto, se calcula que para la galga,
el mínimo detectable, es de 8,1 µε mientras que para el sensor FBG es de 1,2 µε.
Ensayos de durabilidad a fatiga y ciclos térmicos
Pensados para ser utilizados en la monitorización de estado estructural, los sensores de fibra
óptica deben tener una vida igual o superior a la de la estructura donde están integrados.
Está situación es aún más crítica en el caso de sensores embebidos dado que no existe la
opción de ser reparados o reemplazados. Es por ello de vital importancia realizar
simulaciones de ciclos de vida de estructuras con sensores de fibra óptica integrados para
comprobar la fiabilidad en la medida a lo largo de su vida operacional.
Este aspecto también se estudia en [MAL 2006] realizando ensayos de fatiga a bajo número
de ciclos y cargas de tracción relativamente altas, simulando condiciones extremas de
servicio. En estos ensayos se cargaron todas las probetas a cargas oscilantes de tracción: de
0 a 10, 0 a 20, 0 a 23, 0 a 24 kN con 200 ciclos por cada condición de carga, acumulándose
para cada probeta una cantidad total de 800 ciclos. A posteriori, se acometen ensayos a alto
número de ciclos (106 ciclos a unos 5 Hz), más representativos de las condiciones reales de
vuelo de una aeronave.
En todos los casos, los sensores de fibra óptica que no se han roto durante el manejo, han
sobrevivido al ciclo de carga, manteniéndose ilesas hasta la rotura de la probeta excepto en
un caso, en el que la rotura de la fibra óptica se produce ligeramente antes de la ruptura de
la probeta.
Adicionalmente, se estudia el comportamiento de los sensores FBG frente a ciclos térmicos,
con intervalos térmicos que simulan las condiciones de servicio de aeronaves. En total, se

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
30
realizan 9 ciclos térmicos como el observado en la Figura 17 con una duración de unas 8
horas en un rango de temperaturas entre -55 y 130 oC.
Figura 17. Ciclo de temperatura
Durante el ensayo se conectan tres sensores de fibra óptica por un extremo a un medidor de
potencia óptica y por el otro a una fuente de luz para monitorizar sus prestaciones. Se pone
de manifiesto una cierta influencia de la temperatura sobre las ganancias de las fibras
ópticas, aunque estas pérdidas están dentro de un margen tolerable, con cambios en las
ganancias ópticas del orden del 0,5 dB y 1,5 dB para dos de los sensores. El tercero no era
operativo durante los ensayos por rotura en el manejo.
Otras aplicaciones
Por último, se hará una breve reseña a distintas aplicaciones donde las capacidades de los
sensores de fibra óptica les permiten ser utilizados en diversos campos, tales como la
detección de hidrógeno en el aire o la monitorización de la corrosión de los aceros.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
31
Detección de delaminación en materiales compuestos usando FBGS de pequeño diámetro
embebidos
Un nuevo desarrollo de FBGS de pequeño diámetro se ha aplicado en la detección de
delaminación en laminados CFRP [TAK 2002]. Los sensores, por su pequeño diámetro, son
fácilmente embebidos en la dirección paralela a las fibras de refuerzo tal y como se muestra
en la Figura 18.
Figura 18. Colocación del sensor FBG
El espectro reflejado fue medido para diferentes longitudes de delaminación producida en
un ensayo de flexión a cuatro puntos. La forma del espectro cambia sensiblemente tal como
incrementa la longitud de delaminación, Figura 19.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
32
Figura 19. Espectro reflejado
Por otra parte, el espectro se calcula teóricamente para confirmar el espectro medido
experimentalmente. El resultado reproduce muy bien la magnitud medida. Por tanto, se
puede considerar el cociente entre intensidades de los picos que aparecen en el espectro,
Figura 20, como un indicador efectivo en la predicción de longitud de delaminación.
Figura 20. Cociente entre intensidades de los dos picos vs Longitud de delaminación

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
33
Aplicación de chirped FBGS en la localización de grietas en materiales compuestos
La diferencia fundamental entre estos sensores con los vistos anteriormente es el modo de
marcado. Mientras que los sensores habituales tienen un marcado uniforme, los sensores
“chirped” tienen un marcado que incrementa monótonamente a lo largo de la longitud del
grating como se observa en la Figura 21.
Figura 21. (a) FBG uniforme, (b) FBG “chirped”
Estos sensores han sido utilizados en la detección de grietas en láminas a 90o de un
compuesto cross-ply [OKA 2004]. El espectro reflejado fue medido tras la aplicación de
cargas a tracción. Como resultado, en el espectro se observan hundimientos
correspondientes a las localizaciones de las grietas transversales, Figura 22. Este cambio en
la forma del espectro fue confirmado por cálculos teóricos.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
34
Figura 22. Localización de grietas
Así, se demuestra que la localización de las grietas puede ser identificada directamente
desde las posiciones de los hundimientos observados en el espectro reflejado.
Detección de hidrógeno en el aire mediante redes de sensores FBG
Ha sido desarrollado un sistema de sensores FBG multipunto capaz de detectar picos de
concentración de hidrógeno en el aire en intervalos de tiempo menores que unos pocos
segundos [CAU 2007]. La idea es distribuir por la zona una serie de sensores recubiertos con
una capa sensible de un cerámico (WO3) dopado con un metal noble (Pt).
La interacción de moléculas de hidrógeno con esta capa provoca una reacción exotérmica
que aumenta la temperatura alrededor del sensor según la siguiente reacción:
345 + 67 ↔ 347 + 674
347 + 1 2⁄ 47 ↔ 345
Por tanto el sensor H2 radica en medir el desplazamiento del pico de longitud de onda de
Bragg debido al cambio de temperatura.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
35
Monitorización de la corrosión en aceros
Un sensor para medir la corrosión en acero se ha elaborado basándose en la tecnología de
los sensores de fibra óptica tipo redes de Bragg [WEN 2011]. La sección donde reside la red
de Bragg es metalizada con una película de plata que servirá de conductor. Posteriormente
se recubre mediante un proceso de galvanizado con una capa aleada de Fe-C. La estructura
del sensor recubierto con Fe-C se muestra en la Figura 23.
Figura 23. Estructura de un FBGS recubierto con Fe-C
El sensor ha sido probado en distintos medios corrosivos. En ellos, la capa Fe-C incrementa
su volumen generando tensiones en la fibra. El sensor FBG experimenta por tanto un campo
de deformaciones observándose un cambio en el espectro reflejado. Se comprueba que este
hecho es un buen indicador para la detección de corrosión en los aceros.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
36
4. PLAN DE ENSAYOS
Se presentarán a lo largo de este punto dos grandes bloques de ensayos: tracción y flexión,
introduciendo en primer lugar un listado de materiales utilizados. En el primero de estos
bloques se han utilizado diferentes equipos de medida para así ampliar la gama de
resultados a ser comparados. En solo uno de ellos ha sido necesaria una etapa previa de
conexionado y puesta a punto del equipo. Es el caso del interrogador óptico encargado de
adquirir y procesar los datos de los sensores FBG. Como equipos de referencia han sido
utilizados un sistema de medida de deformaciones por video correlación (ARAMIS) y un
equipo de extensometría para leer los datos procedentes de galgas extensométricas. En el
bloque de flexión solo se ha comparado los resultados ofrecidos por la fibra óptica con los de
galgas extensométricas.
En cada uno de los ensayos en los que ha sido utilizada la fibra óptica, se ha optado por
pegar los sensores FBG sobre la superficie. No obstante también se mostrará en el desarrollo
de este apartado el procedimiento llevado a cabo para embeber fibra óptica en un panel de
material compuesto.
4.1 MATERIALES
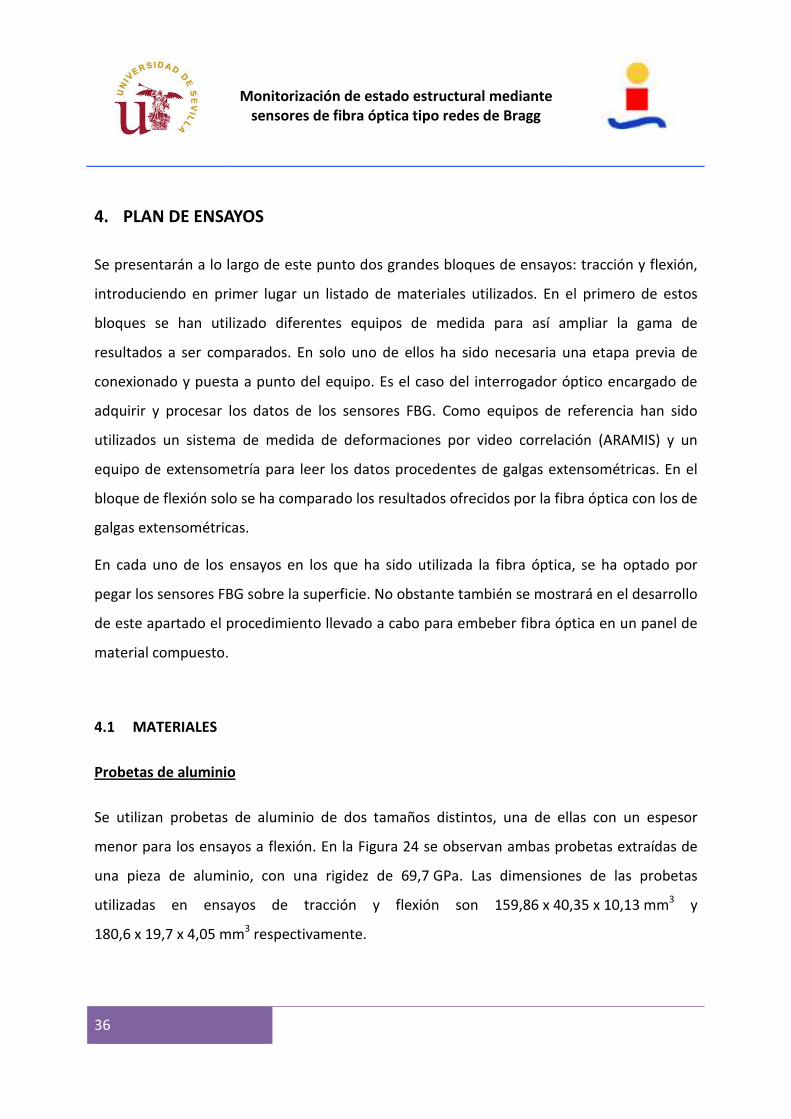
Probetas de aluminio
Se utilizan probetas de aluminio de dos tamaños distintos, una de ellas con un espesor
menor para los ensayos a flexión. En la Figura 24 se observan ambas probetas extraídas de
una pieza de aluminio, con una rigidez de 69,7 GPa. Las dimensiones de las probetas
utilizadas en ensayos de tracción y flexión son 159,86 x 40,35 x 10,13 mm3 y
180,6 x 19,7 x 4,05 mm3 respectivamente.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
37
Figura 24. Probetas de (a) tracción, SHMT001; (b) flexión, SHMF001
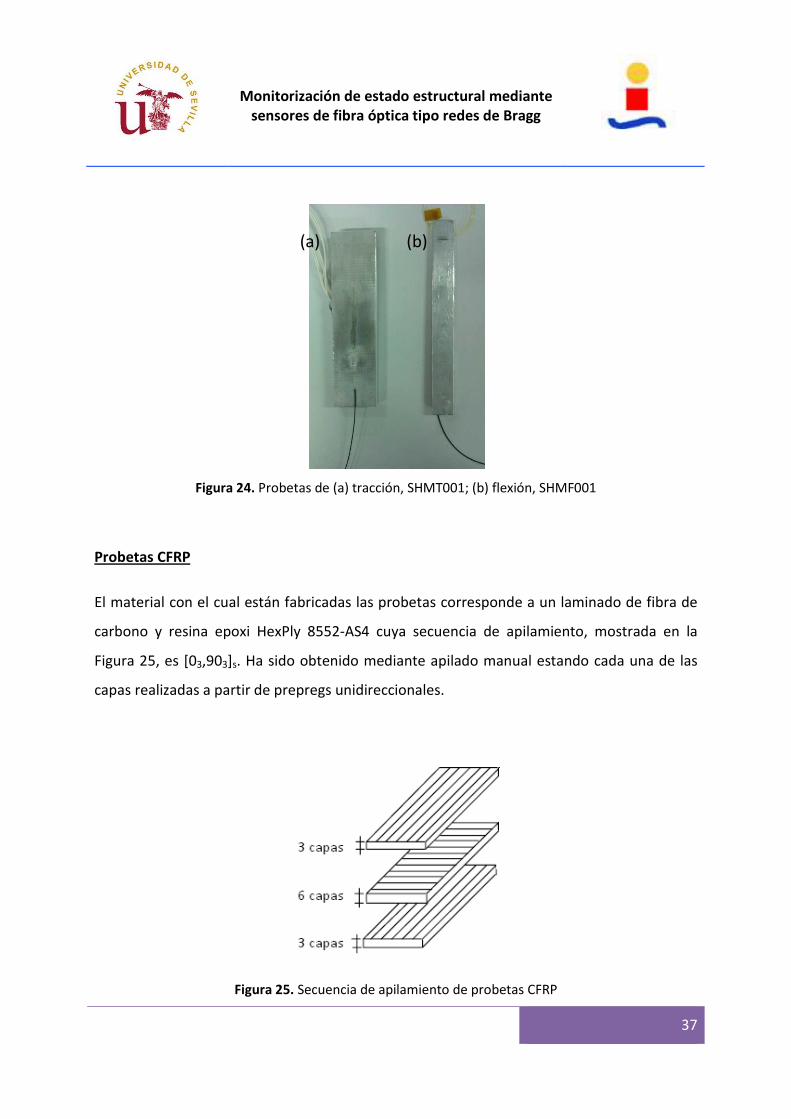
Probetas CFRP
El material con el cual están fabricadas las probetas corresponde a un laminado de fibra de
carbono y resina epoxi HexPly 8552-AS4 cuya secuencia de apilamiento, mostrada en la
Figura 25, es [03,903]s. Ha sido obtenido mediante apilado manual estando cada una de las
capas realizadas a partir de prepregs unidireccionales.
Figura 25. Secuencia de apilamiento de probetas CFRP
(a) (b)
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
38
En la Tabla 1 se muestran las dimensiones correspondientes a las cuatro probetas distintas
utilizadas, Figura 26.
Probetas CFRP
Denominación Longitud
(mm)
Ancho
(mm)
Espesor
(mm)
Peso (g) Densidad
(g/cm3)
EVAT005 180,00 18,06 2,23 11,4265 1,5762
EVAT051 179,98 18,18 2,27 11,6186 1,5617
EVAT053 180,00 18,15 2,23 11,4706 1,5745
EVAT054 179,92 18,16 2,23 11,5287 1,5802
Tabla 1. Datos volumétricos probetas CFRP
Figura 26. Probetas CFRP
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
39
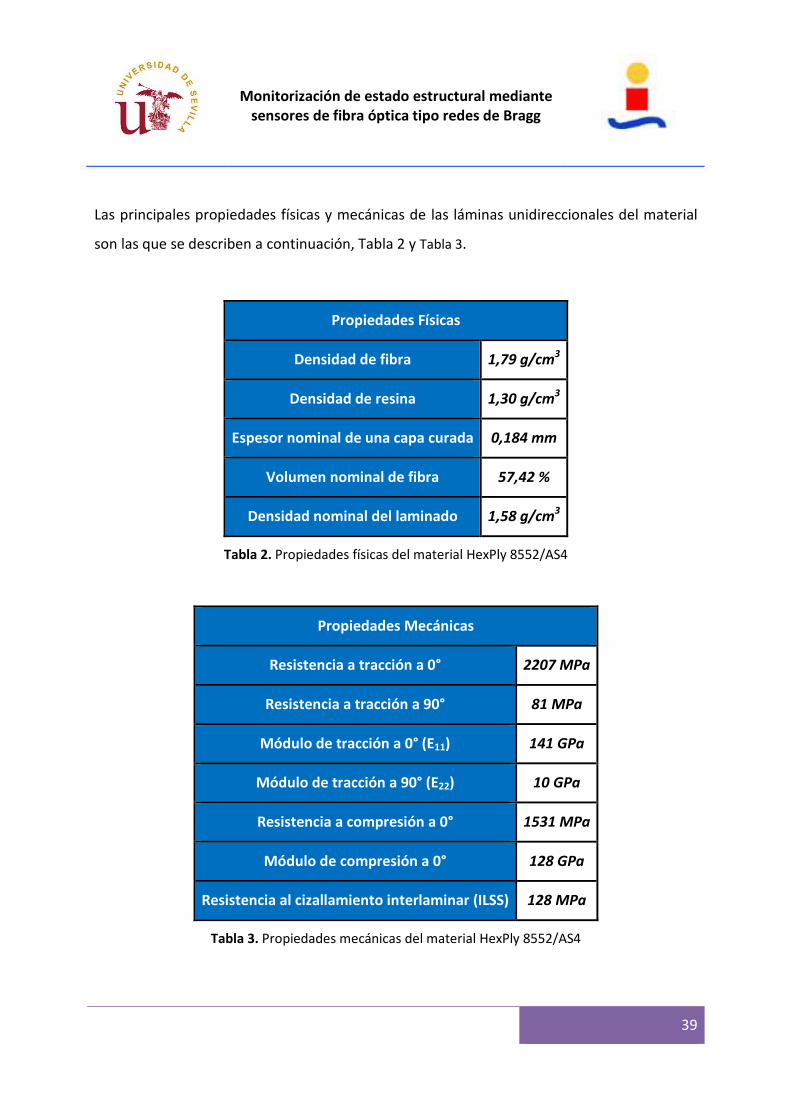
Las principales propiedades físicas y mecánicas de las láminas unidireccionales del material
son las que se describen a continuación, Tabla 2 y Tabla 3.
Propiedades Físicas
Densidad de fibra 1,79 g/cm3
Densidad de resina 1,30 g/cm3
Espesor nominal de una capa curada 0,184 mm
Volumen nominal de fibra 57,42 %
Densidad nominal del laminado 1,58 g/cm3
Tabla 2. Propiedades físicas del material HexPly 8552/AS4
Propiedades Mecánicas
Resistencia a tracción a 0° 2207 MPa
Resistencia a tracción a 90° 81 MPa
Módulo de tracción a 0° (E11) 141 GPa
Módulo de tracción a 90° (E22) 10 GPa
Resistencia a compresión a 0° 1531 MPa
Módulo de compresión a 0° 128 GPa
Resistencia al cizallamiento interlaminar (ILSS) 128 MPa
Tabla 3. Propiedades mecánicas del material HexPly 8552/AS4
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
40
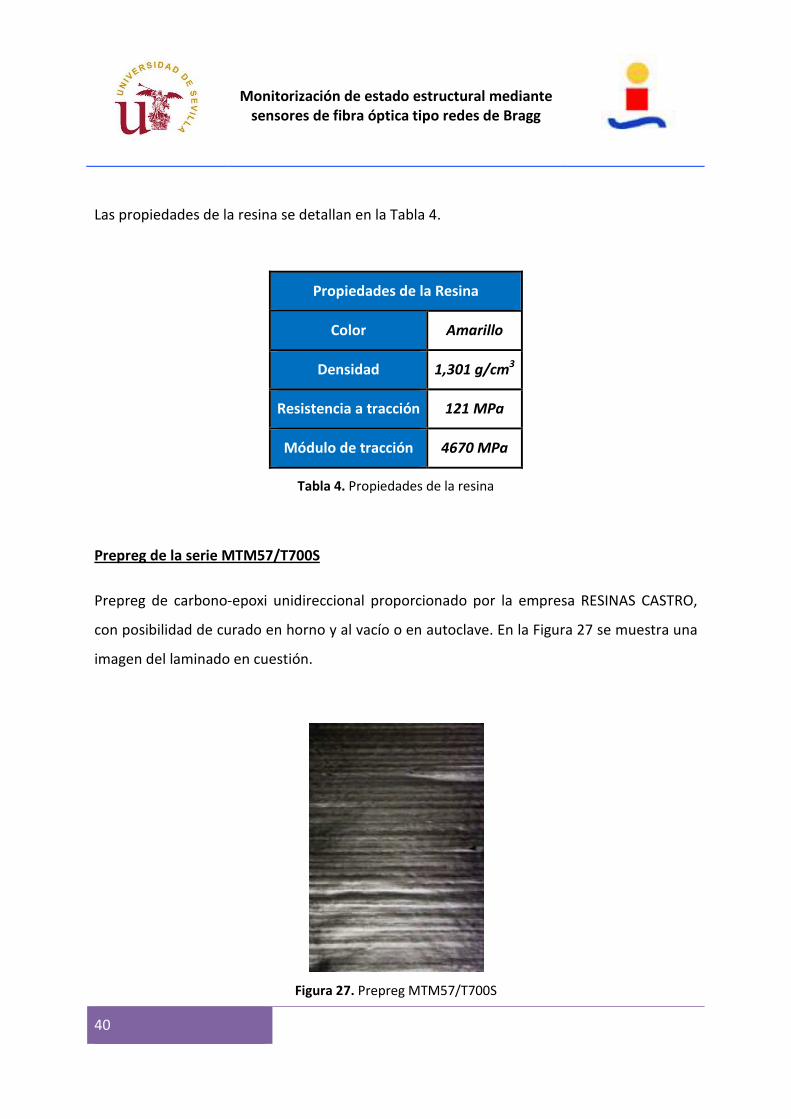
Las propiedades de la resina se detallan en la Tabla 4.
Propiedades de la Resina
Color Amarillo
Densidad 1,301 g/cm3
Resistencia a tracción 121 MPa
Módulo de tracción 4670 MPa
Tabla 4. Propiedades de la resina
Prepreg de la serie MTM57/T700S
Prepreg de carbono-epoxi unidireccional proporcionado por la empresa RESINAS CASTRO,
con posibilidad de curado en horno y al vacío o en autoclave. En la Figura 27 se muestra una
imagen del laminado en cuestión.
Figura 27. Prepreg MTM57/T700S

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
41
Las características técnicas más representativas de esta serie se especifican en la Tabla 5.
Propiedades del prepreg
Densidad superficial de
carbono
300 g/m2 Condiciones de
curado al vacio
80 oC durante 12 h
100 oC durante 3 h
120 oC durante 1 h Densidad superficial de resina 162 g/m
2
Porcentaje de resina 35 % Tª conservación -18 oC
Ancho de lámina 400 mm Tiempo de vida 12 meses en frío
30 días a Tª ambiente Espesor una vez curado 0,301 mm
Tabla 5. Propiedades del prepreg
4.2 EQUIPAMIENTO
Interrogador óptico sm130
El interrogador óptico sm130, Figura 28, es un módulo de interrogación diseñado para
analizar la respuesta de sensores de fibra óptica ante diversas excitaciones. Emplea el núcleo
interrogador óptico x30, que incorpora un láser de barrido, lo cual lo capacita para una
amplia adquisición de datos procedentes de múltiples FBGS. El equipo incluye el software
Micron Optics ENLIGHT Sensing Analysing que proporciona numerosas herramientas para la
adquisición, computación y análisis de datos.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
42
Figura 28. Interrogador óptico sm130
Las características técnicas del equipo se detallan en la Tabla 6.
Características Interrogador Óptico sm130
Nº de canales ópticos 4 Frecuencia de
barrido 1 KHz
Rango de longitud de onda
1510-1590 nm Rango dinámico 25 dB con ganancia
ajustable
Estabilidad de longitud de onda
2 pm promedio
5 pm máximo
Máxima FBG por canal
80
Tabla 6. Características técnicas del interrogador óptico sm130
Sensor FBG os1100
El sensor de fibra óptica tipo red de Bragg os1100 está diseñado para el uso en aplicaciones
sensoriales. Posee una red de Bragg centrada en dos metros de fibra recubierta con
poliimida. Este recubrimiento transfiere la deformación producida al centro del núcleo. Así
mismo soporta un amplio rango de temperaturas (ver Tabla 7).

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
43
Existen FBGS con uno o dos conectores FC/APC, habiéndose utilizado para cada uno de los
ensayos sensores con sólo un conector y libre al otro extremo. Una imagen del mismo se
puede ver en la Figura 29.
Figura 29. Sensor FBG os1100
Un resumen de especificaciones técnicas de este tipo de sensor se muestra en la Tabla 7.
Especificaciones FBGS os1100
Nº de sensores 1
Longitud de red de Bragg 10 mm
Límite de operatividad en deformaciones 5000 µε
Rango de operatividad en temperatura -40 a 120 o
C
Sensibilidad a deformación ≈ 1,2 pm/µε
Respuesta térmica ≈ 9,9 pm/oC
Tipo de recubrimiento Poliimida
Tabla 7. Propiedades físicas del sensor FBG os1100

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
44
Equipo de extensometría MGC Plus
El equipo de extensometría MGC Plus, desarrollado por la compañía HBM, es un sistema de
amplificación de medición capaz de recibir datos de diversas magnitudes gracias a la
aplicación de sus diversos módulos, Figura 30. Posee actualmente 7 amplificadores de 8
canales cada uno, aunque tiene capacidad para 16.
Figura 30. Equipo de extensometría MGC Plus
Las principales características técnicas del equipo se muestran en la Tabla 8.
Características Equipo de Extensometría MGC Plus
Nº de canales 7 amplificadores de 8
canales cada uno Ancho de banda 1 KHz
Rango de temp. de uso
-20…+60 oC
Voltaje de entrada ajustable
230 V/115 V
50 Hz/60 Hz
Posibilidades de conexión
USB, Ethernet y ranura
PCMCIA
Velocidad de recogida de datos
262144 datos/s
Tabla 8. Características técnicas del equipo de extensometría MGC Plus

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
45
Incorpora el software CATMANEASY-AP para los procesos de adquisición, visualización y
evaluación de datos de medición.
Por su alta capacidad de recepción de distintos dispositivos y por la versatilidad de su
software, ha sido el elegido no solo para recoger los datos de galgas extensométricas, sino
también para recibir la señal de fuerza aplicada en el ensayo de la máquina ZWICK así como
para la lectura de los datos procedentes del interrogador óptico sm130 de Micron Optics.
Galgas extensométricas LY63-3/350; RY103-3/350
Las galgas extensométricas utilizadas han sido desarrolladas por la compañía alemana HBM.
Disponen de una amplia gama de geometrías para distintas aplicaciones. El modelo LY63-
3/350 es un modelo de galga lineal con un solo grid de medida compensada para aluminio y
utilizado para análisis en tensión. El modelo RY103-3/350 se diferencia únicamente del
anterior en que dispone de tres grids de medida con orientación 0o, 45o, 90o (roseta). Ambos
se muestran en la Figura 31.
Figura 31. Galgas extensométricas (a) lineal, (b) roseta
(a) (b)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
46
En la Tabla 9 se resumen las características que definen estos modelos.
Características técnicas de galgas extensométricas
Resistencia 350 Ω Material Constatan
Factor de galga 2,02 Canales de medida 1 ó 3 según el caso
Tabla 9. Características técnicas de galgas extensométricas
Sistema de medida de deformaciones por video correlación ARAMIS
ARAMIS es un sistema óptico de medida de deformaciones en tres dimensiones que
proporciona una representación gráfica de las medidas realizadas. Este equipo está
desarrollado por la compañía GOM.
El sistema está formado por dos cámaras CCD (que permiten la medida de las deformaciones
en 3D), dos lámparas de iluminación LED, un sensor con un controlador y un ordenador con
el software de control, Figura 32.
La principal ventaja de este sistema es que proporciona las deformaciones de toda la
superficie del componente a ensayo sin necesidad de contacto con la misma. Además, es
posible medir con el mismo sensor objetos de diferentes tamaños (desde 1 mm hasta
2000 mm) mostrando deformaciones comprendidas entre el 0,01 y el 100 %.
El sistema de video correlación ARAMIS puede ser empleado tanto en ensayos estáticos
como dinámicos.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
47
Figura 32. Sistema de video correlación ARAMIS
La configuración del ensayo y el posterior procesado y análisis de resultados se realiza
mediante la aplicación software ARAMIS, cuya versión es la v6.1. En la Figura 33 se muestra
una imagen del entorno de trabajo del software.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
48
Figura 33. Vista de la pantalla principal del software ARAMIS
Tras el procesado de las imágenes, ARAMIS presenta los resultados en un informe que es
posible configurar con los datos deseados. Existe una amplia variedad de magnitudes que
ARAMIS permite representar además de las deformaciones totales, tales como las
deformaciones en cada uno de los ejes, los desplazamientos, las tensiones, etc.
Adicionalmente, se pueden establecer secciones o puntos de interés en los cuales analizar la
evolución de la magnitud representada.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
49
Máquina universal de ensayos Zwick
La máquina de ensayos empleada es una máquina electromecánica de 100 kN de la marca
ZWICK modelo BT1-FB100TN, Figura 34.
Figura 34. Máquina universal de ensayos Zwick de 100 kN
Las características técnicas de la máquina se presentan en la Tabla 10.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
50
Características Máquina Universal de Ensayos ZWICK 100kN
Fuerza
Tracción/Compresión 100 kN
Velocidad del
Travesaño
0,0005 hasta
300 mm/min
Tamaño 1800x1070x600 mm3
Frecuencia Máxima
de Ensayo 0,5 Hz
Peso con Accesorios 680 Kg Rango Tª Uso 10° a 30 °C
Superficie de Apoyo 380 cm2 Rango Humedad 20 % a 90 %
Nivel de Ruido 71 dB Precisión velocidad
establecida 0,037 % de Vnom
Tabla 10. Características técnicas de la máquina universal de ensayos Zwick
Esta máquina permite realizar el control del ensayo en posición del travesaño, en carga y en
extensión del extensómetro siendo en todos los casos la velocidad a la que se ajusta el
ensayo independiente de la carga fijada. Dispone de diversos útiles de agarre para ensayos.
Los utilizados para el presente proyecto han sido el útil de tracción, Figura 35, y el de flexión
en tres puntos, Figura 36. El sistema de agarre del útil de tracción no es el adecuado para
realizar esfuerzos a compresión. La máquina ZWICK incorpora un útil de compresión (platos),
aunque no está diseñado para el tipo de probetas utilizadas en los ensayos.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
51
Figura 35. Útil de tracción de la máquina ZWICK
Figura 36. Útil de flexión de la máquina ZWICK
El software empleado para gestionar los datos procedentes de la máquina de ensayos es el
TestXpert II, desarrollado por la compañía Zwick/Roell. Las funciones desempeñadas por el
software son configurar el ensayo mecánico, grabar los datos, y presentar los resultados del
test.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
52
Al finalizar el ensayo los datos que han sido grabados durante la aplicación de la carga son
presentados por el software, como se muestra en la Figura 37, pudiendo ser exportados en
formato ASCII, PDF o Excel.
Figura 37. Software TestXpert II
Cámara climática o de altitud
Sistema de pruebas capaz de reproducir de forma controlada en el laboratorio, las
condiciones atmosféricas existentes a diversas altitudes y con ello poder determinar el
comportamiento de materiales bajo dichas condiciones, Figura 38. En concreto se pueden
regular la presión, la temperatura y la humedad tanto para la realización de ensayos de
altitud como para el acondicionamiento de materiales.
En lo que al proyecto presentado se refiere, el uso de la máquina se limita al curado del
material compuesto como se detallará en adelante.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
53
Figura 38. Cámara climática de altitud
Las principales características técnicas se muestran en la Tabla 11.
Características Cámara Climática de Altitud
Rango de presión
Desde presión
atmosférica a 100 mbar
Velocidad de calentamiento
1,5 oC/min
Rango de Tª
-70…+100 oC
Velocidad de enfriamiento
1 oC/min
Volumen interno
1 m3
Velocidad de variación de presión
30,5 mbar/min
Rango de humedad
De 20 % a 95 % en rango de Tª entre 20 oC y 80
oC
Tabla 11. Características técnicas de la cámara climática de altitud

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
54
Centralización de equipos
Con el objetivo de no inducir pequeños errores de sincronización y de poder visualizar la
medida en tiempo real, se ha procurado desde un primer momento centralizar al máximo la
adquisición de magnitudes medidas por los diferentes equipos. Esto ha sido posible gracias a
la versatilidad del software catmanEasy-AP, software que incorpora el equipo de
extensometría MGC Plus. De esta manera se ha llegado a presentar en una misma pantalla
de ordenador, donde está instalado el software, los datos de fuerza procedentes del equipo
Zwick y los datos de deformaciones medidas con galgas extensométricas y con sensores FBG,
ambas tomadas con equipos de diferentes compañías. No ha sido posible en cambio,
conexionar con el software de Aramis, aunque al menos éste permite incluir la señal de
fuerza procedente del equipo Zwick. Un esquema del conexionado de los equipos se
muestra en la Figura 39.
Figura 39. Esquema del conexionado de los equipos

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
55
4.3 ENSAYOS
Tal y como se ha mencionado en la parte introductoria del plan de ensayos, se presentan dos
grandes bloques de ensayos mecánicos. Dentro de cada uno de ellos se diferencia a su vez,
entre qué dispositivos de medida se comparan los resultados. A modo de resumen, se
clasifican en la Tabla 12 la totalidad de los ensayos realizados durante la ejecución del
proyecto, asignando a cada uno de ellos una denominación con la cual serán referenciados
en el posterior apartado de resultados.
Tipología
de ensayo
Dispositivos
de medida Material Probeta Característica del Ensayo Denominación
TRACCIÓN
ARAMIS
vs
Galga Ext.
A vs SG
CFRP EVAT005 Serie 15, 20, 25, 30 kN T_AvsSG_EVAT005
CFRP EVAT054 Repetibilidad a 20 kN
(5 veces) T_AvsSG_EVAT054
FBG
vs
Galga Ext.
FBG vs SG
Aluminio SHMT001 FBG y 3 SGs T_FBGvsSG_SHMT001
CFRP EVAT051 FBG y SG enfrentadas T_FBGvsSG_EVAT051
CFRP EVAT053 FBG y SG misma cara T_FBGvsSG_EVAT053
CFRP EVAT054 FBG y 2 SGs misma cara T_FBGvsSG_EVAT054
CFRP EVAT054 Serie 3, 6, 9, 12, 15 kN T_FBGvsSG_EVAT054_S
FLEXIÓN FBG vs SG Aluminio SHMF001 Serie 60, 100, 140 N F_FBGvsSG_SHMF001
CFRP EVAT054 Serie 40, 50, 60 N F_FBGvsSG_EVAT054
Tabla 12. Tabla-Resumen ensayos realizados

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
56
En la denominación de los ensayos, la primera letra (T o F) representa la tipología del
ensayo. A continuación se señalan los dispositivos de medida entre los que se está
comparando. Por último, aparece la probeta utilizada. Al darse el caso de coincidencia de
denominación entre dos de ellos, se opta por añadir la letra “S” (T_FBGvsSG_EVAT054_S) al
final de uno, caracterizándolo como una serie de ensayos.
Instrumentado de probetas
Puesto que es éste un proceso previo común en todos los ensayos, se explican a
continuación los pasos seguidos en la preparación de las probetas para el pegado de los
instrumentos de medida, así como el propio pegado que será indistinto de la superficie de
aplicación (aluminio o CFRP).
Cuando se actúa sobre aluminio, existe un paso precedente que no debe cometerse sobre
probetas CFRP, el lijado de la superficie. Su objetivo es dejar ésta lo más lisa posible y libre
de ralladuras. El resto de operaciones es común para ambos materiales.
Se procede a limpiar la superficie con acetona. El siguiente paso es marcar en la probeta la
localización exacta de los sensores. Es importante tomar especial cuidado en esta operación
pues desviaciones en la orientación deseada provocarán errores posteriores en la medida de
deformaciones.
Una vez finalizada la preparación superficial se realiza el pegado sobre la superficie. Para ello
se ha utilizado un cianoacrilato de baja viscosidad (100 mPa/s) de la compañía Loctite, L401,
capaz de resistir temperaturas de hasta 120 oC. En el caso de la galga se procura que el
adhesivo quede extendido sobre la totalidad de su superficie. Con el sensor FBG, primero se
debe pegar un punto de la fibra situado a un lado de la red de Bragg para posteriormente,
aplicando una ligera tracción sobre ella, pegar un segundo punto situado al otro extremo del
sensor. Una vez haya secado en estos dos puntos, se extiende nuevo adhesivo sobre toda la
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
57
zona entre ellos, de manera que el sensor quede completamente adherido a la localización
donde se pretende medir las deformaciones.
Una vez se haya secado el adhesivo utilizado en el pegado de la galga extensométrica, se
procede a soldar sus patillas. Se trata de una soldadura básica con estaño en el que el
procedimiento se ayuda con un flux de la compañía JBC. Una vez se comprueba la correcta
lectura, se expande una capa de silicona sobre ella con el fin de proteger la unión soldada.
4.3.1 Ensayos mecánicos a tracción
Ensayo T_AvsSG_EVAT005
Preparación de probetas
El sistema de video correlación Aramis necesita de un proceso previo de pintado de la
superficie de la probeta a analizar. Primero se extiende sobre la superficie una capa de
pintura blanca mediante un espray-aerosol. Luego, para crear el contraste de puntos que
será detectado por Aramis, se impregna la superficie de una leve capa de grafito también a
modo de espray. Esta operación debe ser realizada en una cámara de pintado preparada
para ello. Es necesario proteger la zona de agarre de las mordazas con el objetivo de evitar
que la propia pintura pueda ocasionar deslizamientos relativos entre mordazas y probeta.
Para ello se ha empleado cinta de carrocero durante el pintado, ocupando 50 mm de los
extremos de la probeta, medida que se considera suficiente para el agarre de la misma. No
obstante, en este caso se produjo deslizamiento no deseado. Para solventar esta
problemática, se optó por adhesivar (usando el mismo cianoacrilato que en el pegado de las
galgas extensométricas) papel de lija en la zona de agarre.
Por la cara contraria se fija una galga extensométrica como se ha descrito en la introducción
de este apartado. El resultado se observa en la Figura 40, donde se tiene una visual de las
caras de la probeta denominada EVAT005.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
58
Figura 40. EVAT005 (a) cara preparada para Aramis, (b) cara con SG
Ensayo
Con este ensayo se pretende comparar las deformaciones medidas por el sistema de video
correlación Aramis con el resultado ofrecido por las galgas extensométricas.
Se realiza una serie de ensayos a tracción en los que la carga máxima entre uno y otro se
aumenta de manera escalonada en intervalos de 5 kN sin llegar a valores que excedan de la
tensión de rotura aproximada para estas probetas. En todos ellos se desestiman los datos
recogidos en el proceso de descarga. Los parámetros de estos ensayos se recogen en la
Tabla 13, donde las tres últimas filas corresponden a parámetros propios de Aramis como el
tiempo de disparo, número de imágenes tomadas por segundo y cantidad de imágenes total.
(a) (b)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
59
Parámetros de ensayo
Carga máxima 15 kN 20 kN 25 kN 30 kN
Tensión máxima 372,45 MPa 496,6 MPa 620,78 MPa 744,9 MPa
Precarga 150,8 N 320,55 N 313,59 N 347,71 N
Velocidad del ensayo 1 mm/min (control en desplazamiento)
Frecuencia de adquisición 50 Hz
Shutter time Aramis 147,469 ms
Frame rate Aramis 4,0 3,0 2,5 3,0
Images Aramis 650 554 456 650
Tabla 13. Parámetros ensayo T_AvsSG_EVAT005
Ensayo T_AvsSG_EVAT054
Preparación de probetas
La preparación de esta probeta sólo difiere al caso anterior en que en esta ocasión se fijan
dos galgas extensométricas en lugar de una. Se sitúan ambas equidistantes del eje
longitudinal central. Esta configuración es la indicada para los ensayos de flexión pues esta
misma probeta (EVAT054) se reutiliza posteriormente. En la Figura 41 se observa la probeta
una vez instrumentada. El sensor de fibra óptica visible fue inhabilitado para esta serie de
ensayos.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
60
Figura 41. EVAT054 (a) cara preparada para Aramis, (b) cara con dos SG
Ensayo
El objetivo principal de este ensayo es analizar la repetibilidad del equipo de video
correlación mediante la comparación entre los resultados obtenidos con Aramis y los
obtenidos con galgas extensométricas.
En esta ocasión, se trata de un mismo ensayo repetido un número de cinco veces en el que
la misma probeta es traccionada hasta un nivel de carga aplicada de 20 kN, correspondiente
a una tensión máxima de 496,6 MPa. Las condiciones ambientales no varían entre un ensayo
y otro. Los parámetros utilizados en este ensayo se recogen en la Tabla 14.
(a) (b)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
61
Parámetros de ensayo
Carga máxima 20 kN Frecuencia de adquisición 50 Hz
Tensión máxima 496,6 MPa Shutter time Aramis 95,000 ms
Precarga 220 N Frame rate Aramis 8,0
Velocidad de ensayo 2 mm/min Images Aramis 663
Tabla 14. Parámetros ensayo T_AvsSG_EVAT054
Ensayo T_FBGvsSG_SHMT001
Preparación de probetas
La probeta SHMT001 ha sido la utilizada en el test previo de comprobación de alineamiento
de mordazas (ver apartado 5: Puesta a punto), por tanto, está instrumentada tal y como
indica la norma ASTM D3039 con tres galgas extensométricas. Una de ellas se fija centrada
en una de las caras de la probeta. Al reverso, se colocan dos galgas distanciadas de los
bordes en un valor igual a 1/8 del ancho de la probeta. Adicionalmente, sobre esta misma
cara se adhiere un sensor FBG ocupando el eje central longitudinal de la superficie. El
instrumentado final se observa en la Figura 42.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
62
Figura 42. SHMT001 (a) cara con SG (b) cara con FBGS y 2 SGs
Ensayo
El objetivo de este ensayo es el análisis comparativo entre las medidas de deformaciones
ofrecidas por el sensor de fibra óptica y las galgas extensométricas en su aplicación sobre
aluminio.
El punto de medida se sitúa en la zona de la red de Bragg, tomando como valor de
deformación correspondiente a las galgas extensométricas, el valor medio entre las dos
galgas situadas en la misma cara del sensor FBG.
La probeta es sometida a una carga de tracción a velocidad constante hasta un máximo de
35 kN (85,62 MPa) cercana a la equivalente tensión de límite elástico pero nunca
sobrepasándola. De esta forma se asegura el comportamiento elástico del material.
Posteriormente es descargada automáticamente por el controlador de la máquina de
ensayos. Los parámetros del ensayo se recogen en la Tabla 15.
(a) (b)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
63
Parámetros de ensayo
Carga máxima 35 kN
Tensión máxima 85,62 MPa
Precarga 133 N
Velocidad del ensayo 1 mm/min
Frecuencia de adquisición 50 Hz
Tabla 15. Parámetros ensayo T_FBGvsSG_SHMT001
Ensayo T_FBGvsSG_EVAT051
Preparación de probetas
La probeta EVAT051 es la primera de fibra de carbono-epoxi instrumentada para comparar
sensores FBG y galgas extensométricas. Por facilidad en el pegado, se decide colocar un
sensor de fibra óptica por una de las caras mientras que por la opuesta se adhiere una sola
galga extensométrica lineal. En la Figura 43 y en la Figura 44 se observan ambas caras de la
probeta una vez fijada en el útil de tracción.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
64
Figura 43. EVAT051 cara con SG
Figura 44. EVAT051 cara con FBGS
Ensayo
El objetivo de este ensayo vuelve a ser el análisis comparativo entre las medidas de
deformaciones ofrecidas por sensores de fibra óptica tipo redes de Bragg y galgas
extensométricas, esta vez aplicados sobre CFRP.
Se realizan dos ensayos distintos con las dos posiciones de colocación en las mordazas
posibles. El objetivo de ello es dejar entrever si existiera, una posible desalineación en las
mordazas.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
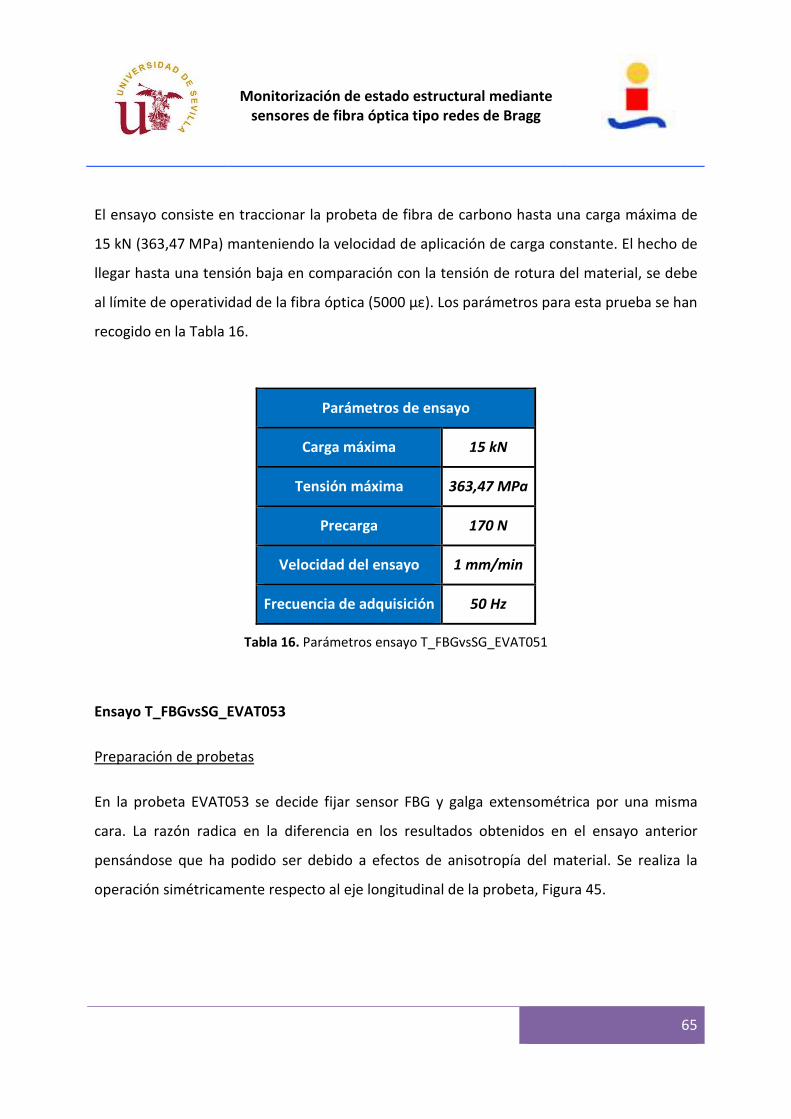
65
El ensayo consiste en traccionar la probeta de fibra de carbono hasta una carga máxima de
15 kN (363,47 MPa) manteniendo la velocidad de aplicación de carga constante. El hecho de
llegar hasta una tensión baja en comparación con la tensión de rotura del material, se debe
al límite de operatividad de la fibra óptica (5000 µε). Los parámetros para esta prueba se han
recogido en la Tabla 16.
Parámetros de ensayo
Carga máxima 15 kN
Tensión máxima 363,47 MPa
Precarga 170 N
Velocidad del ensayo 1 mm/min
Frecuencia de adquisición 50 Hz
Tabla 16. Parámetros ensayo T_FBGvsSG_EVAT051
Ensayo T_FBGvsSG_EVAT053
Preparación de probetas
En la probeta EVAT053 se decide fijar sensor FBG y galga extensométrica por una misma
cara. La razón radica en la diferencia en los resultados obtenidos en el ensayo anterior
pensándose que ha podido ser debido a efectos de anisotropía del material. Se realiza la
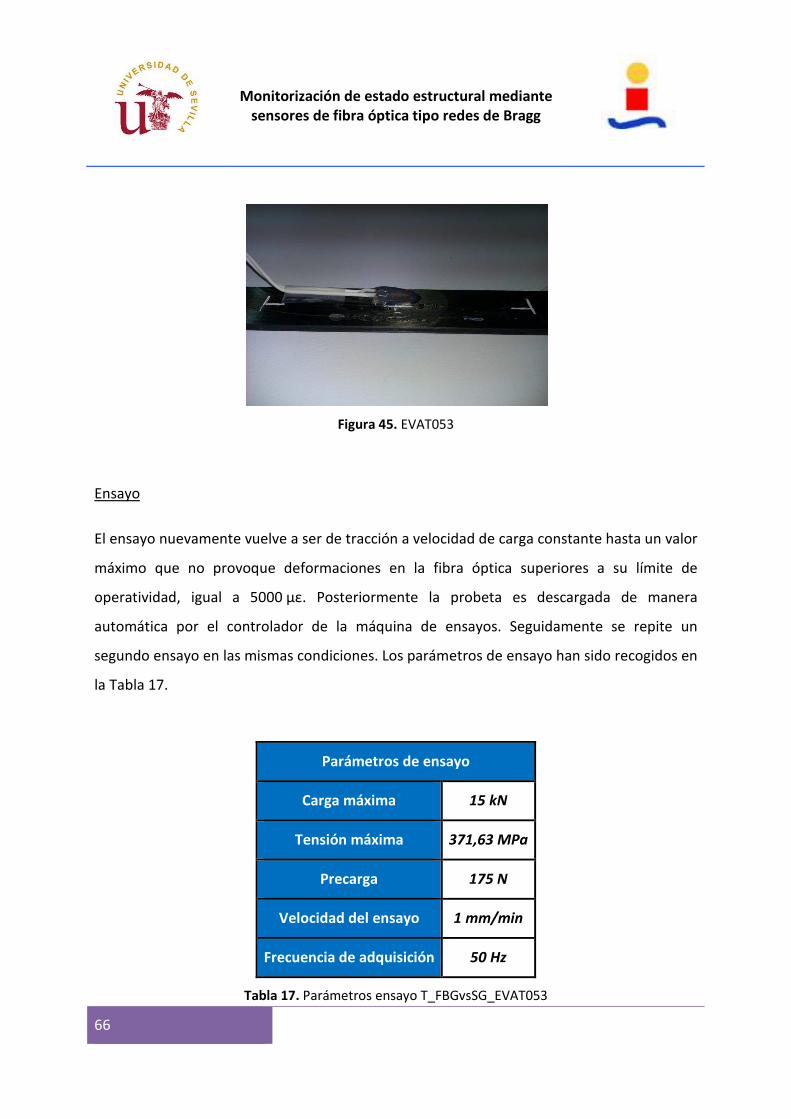
operación simétricamente respecto al eje longitudinal de la probeta, Figura 45.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
66
Figura 45. EVAT053
Ensayo
El ensayo nuevamente vuelve a ser de tracción a velocidad de carga constante hasta un valor
máximo que no provoque deformaciones en la fibra óptica superiores a su límite de
operatividad, igual a 5000 µε. Posteriormente la probeta es descargada de manera
automática por el controlador de la máquina de ensayos. Seguidamente se repite un
segundo ensayo en las mismas condiciones. Los parámetros de ensayo han sido recogidos en
la Tabla 17.
Parámetros de ensayo
Carga máxima 15 kN
Tensión máxima 371,63 MPa
Precarga 175 N
Velocidad del ensayo 1 mm/min
Frecuencia de adquisición 50 Hz
Tabla 17. Parámetros ensayo T_FBGvsSG_EVAT053

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
67
Ensayo T_FBGvsSG_EVAT054
Preparación de probetas
La probeta EVAT054 se reutiliza para este nuevo ensayo en tracción. En apartados anteriores
ya se explicó su instrumentación. En esta ocasión solo será útil la cara donde están fijados
sensor FBG y ambas galgas extensométricas. En la Figura 46 se muestran los dispositivos de
medida una vez fijados y antes de proceder a proteger las galgas con silicona.
Figura 46. EVAT054
Ensayo
La configuración de esta probeta está diseñada para la serie de ensayos a flexión que se
muestran en apartados posteriores. No obstante, antes de proceder al cambio de útil en la
máquina Zwick, se decide repetir en dos ocasiones un ensayo de tracción con los parámetros
recogidos en la Tabla 18, para así disponer de una cantidad mayor de datos para el análisis
comparativo entre las medidas ofrecidas tanto por galgas extensométricas como por
sensores de fibra óptica tipo red de Bragg.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
68
Parámetros de ensayo
Carga máxima 15 kN
Tensión máxima 370,4 MPa
Precarga 173 N
Velocidad del ensayo 1 mm/min
Frecuencia de adquisición 50 Hz
Tabla 18. Parámetros ensayo T_FBGvsSG_EVAT054
Ensayo T_FBGvsSG_EVAT054_S
Preparación de probetas
La probeta empleada es la EVAT054 presentada en la Figura 46.
Ensayo
Con este último ensayo perteneciente al bloque de ensayos mecánicos a tracción, se
pretende caracterizar el error relativo cometido por el sensor FBG respecto a la medida
ofrecida por las galgas extensométricas.
Para ello se han llevado a cabo un número total de cinco ensayos de tracción a diferente
carga. Los parámetros utilizados se han recogido en la Tabla 19. En ellos se han registrado el
error relativo cometido en deformaciones máximas con el objetivo de analizar la evolución
de éste conforme avanza la tensión aplicada.
En el primero de ellos se lleva la probeta EVAT054 a niveles de deformación similares a los
que se sometió a la probeta de aluminio (≈ 1000 µε). Con ello se pretende analizar si el error
visto en deformaciones máximas medidas por FBGS en su aplicación a material compuesto

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
69
CFRP se debe a que ambos materiales han sido sometidos en general a niveles de
deformación muy distantes.
Parámetros de ensayo
Carga máxima 3 kN 6 kN 9 kN 12 kN 15 kN
Tensión máxima 74,08 MPa 148,16 MPa 222,24 MPa 296,32 MPa 370,4 MPa
Precarga 151 N 141 N 146 N 155 N 155 N
Velocidad del ensayo 1 mm/min
Frecuencia de adq. 50 Hz
Tabla 19. Parámetros ensayo T_ FBGvsSG_EVAT054_S
4.3.2 Ensayos mecánicos a flexión
Ensayo F_FBGvsSG_SHMF001
Preparación de probetas
La situación de los elementos de medida sobre la probeta de aluminio SHMF001 se muestra
en detalle en la Figura 47. Se fijan dos galgas extensométricas en la zona central de la
probeta situadas a 1/8 de los bordes. El sensor FBG es pegado justo en el eje central
longitudinal de la misma procurando que no ocupe espacio en la zona de apoyo del útil de
flexión. A pesar de que ambos dispositivos no son útiles en la medición directa de la flecha
(magnitud característica en esta tipología de ensayo), se pretende conocer su
comportamiento bajo estas condiciones de carga.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
70
Figura 47. SHMF001
La relación entre longitud de probeta y distancia entre apoyos se ajusta a lo expuesto en la
normativa ASTM con designación D 7264/D7264M-07. La dimensión longitudinal debe ser un
20 % mayor que la distancia entre apoyos. En este caso, para una longitud de probeta de
180 mm, la distancia entre el borde exterior y el apoyo debe ser de 18 mm.
En el posterior ensayo a flexión sobre una probeta CFRP será aplicado el mismo
procedimiento.
Ensayo
Para esta tipología de ensayos se utiliza un sistema de cargas a tres puntos. El útil de trabajo
se ha mostrado en la Figura 36.
El ensayo consiste en aplicar carga a velocidad constante con los parámetros de ensayos
observados en la Tabla 20, registrando a la vez la medida ofrecida por las dos galgas
extensométricas y por el sensor FBG con el software catmanEasy-AP. Estos archivos de datos
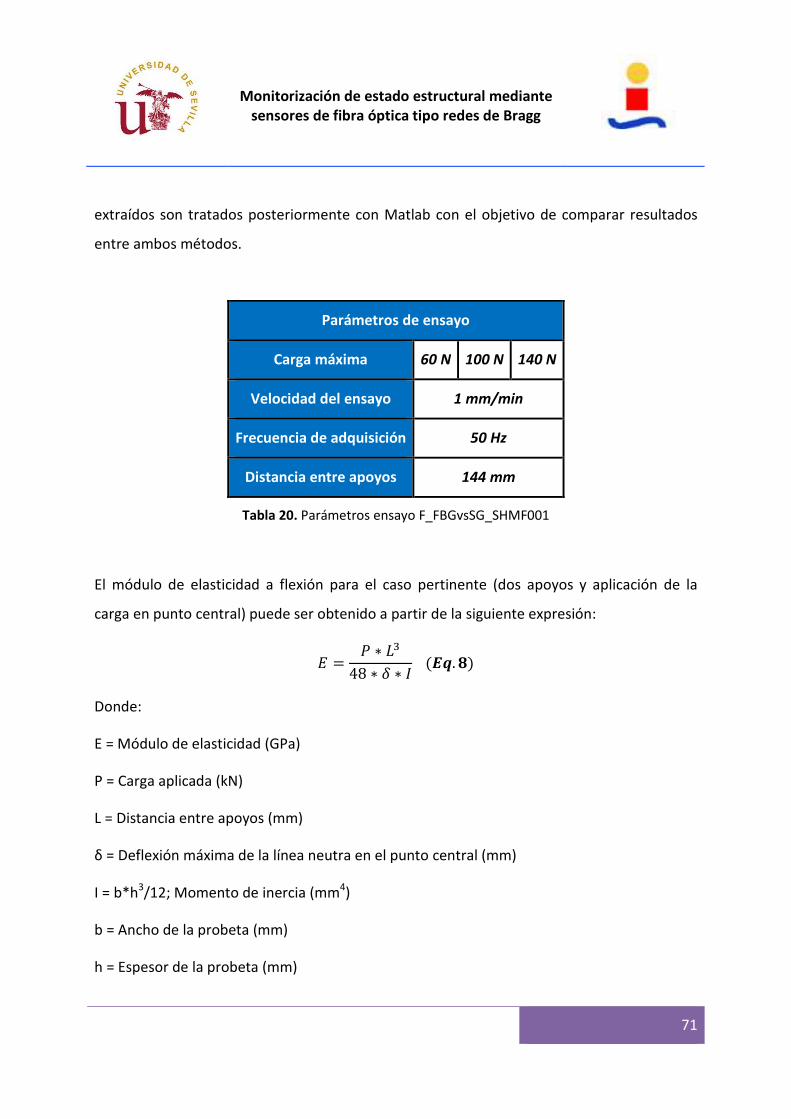
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
71
extraídos son tratados posteriormente con Matlab con el objetivo de comparar resultados
entre ambos métodos.
Parámetros de ensayo
Carga máxima 60 N 100 N 140 N
Velocidad del ensayo 1 mm/min
Frecuencia de adquisición 50 Hz
Distancia entre apoyos 144 mm
Tabla 20. Parámetros ensayo F_FBGvsSG_SHMF001
El módulo de elasticidad a flexión para el caso pertinente (dos apoyos y aplicación de la
carga en punto central) puede ser obtenido a partir de la siguiente expresión:
: � ; ∗ <548 ∗ ? ∗ @ (�A. B)
Donde:
E = Módulo de elasticidad (GPa)
P = Carga aplicada (kN)
L = Distancia entre apoyos (mm)
δ = Deflexión máxima de la línea neutra en el punto central (mm)
I = b*h3/12; Momento de inercia (mm4)
b = Ancho de la probeta (mm)
h = Espesor de la probeta (mm)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
72
Se aprecia en su cálculo que es necesario conocer la deflexión producida durante el ensayo,
que podría ser determinada con un transductor de desplazamiento (LDT) situado en la parte
inferior de la probeta o simplemente controlando el desplazamiento del puente móvil de la
máquina Zwick. Esta labor se escapa del objetivo principal para el cual se acometen estos
ensayos, análisis comparativo entre FBGS y galgas extensométricas. Es por ello que se
desestima el cálculo del módulo de Young a flexión, limitándose los posteriores resultados a
mostrar las deformaciones lineales de la cara sometida a tracción por sendos dispositivos de
medida.
Ensayo F_FBGvsSG_EVAT054
Preparación de probetas
La probeta de fibra de carbono EVAT054 empleada en los ensayos de flexión ya ha sido
utilizada en ensayos mecánicos a tracción anteriores. Una imagen de su superficie con los
elementos de medida ya instalados se detalla en la Figura 46, acorde con lo especificado en
la norma ASTM D 7264/D7264M-07. El proceso de pegado de las galgas y del sensor FBG ha
sido explicado en la parte introductoria de este apartado.
Ensayo
La principal diferencia entre el test a flexión con uno u otro material ha sido la carga
aplicada, puede observarse en la Tabla 21, donde se recogen los parámetros de estos
ensayos. Las pautas seguidas durante su transcurso son las mismas vistas en el apartado
anterior.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
73
Parámetros de ensayo
Carga máxima 40 N 50 N 60 N
Velocidad del ensayo 1 mm/min
Frecuencia de adquisición 50 Hz
Distancia entre apoyos 144 mm
Tabla 21. Parámetros ensayo F_FBGvsSG_EVAT054
4.3.3 Embebido de sensores FBG durante la fabricación de un panel de material
compuesto
Por último, dentro del plan de ensayos de este documento, se explican los pasos llevados a
cabo para embeber fibra óptica dentro del proceso de fabricación de un panel de material
compuesto.
La idea es extraer probetas con y sin fibra óptica embebida en diferentes direcciones
respecto a la dirección de la fibra de refuerzo. Todas ellas se sitúan entre las dos capas
centrales. El objetivo es caracterizar el material en vistas a estudiar si los sensores de fibra
óptica pudieran afectar a la integridad estructural del material huésped.
No obstante, el resultado tras la fabricación no fue el esperado, Figura 48, pues la no
disponibilidad de autoclave impide la correcta aplicación de presión durante el curado del
material.
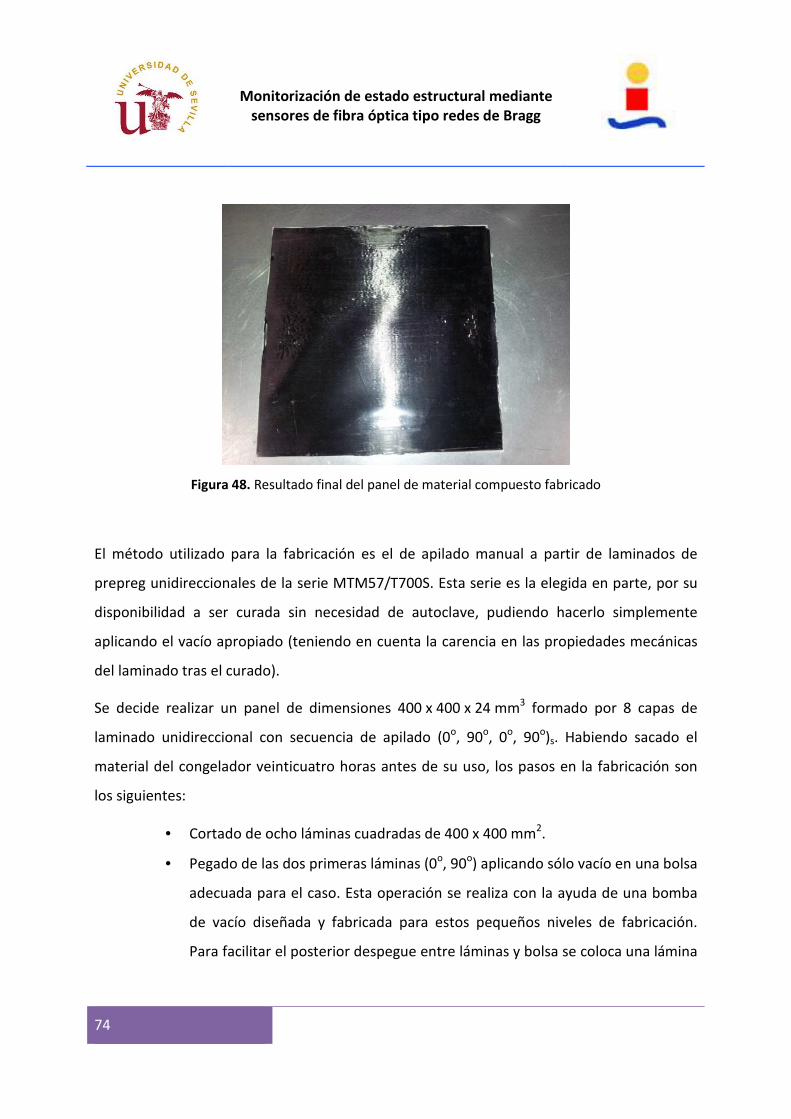
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
74
Figura 48. Resultado final del panel de material compuesto fabricado
El método utilizado para la fabricación es el de apilado manual a partir de laminados de
prepreg unidireccionales de la serie MTM57/T700S. Esta serie es la elegida en parte, por su
disponibilidad a ser curada sin necesidad de autoclave, pudiendo hacerlo simplemente
aplicando el vacío apropiado (teniendo en cuenta la carencia en las propiedades mecánicas
del laminado tras el curado).
Se decide realizar un panel de dimensiones 400 x 400 x 24 mm3 formado por 8 capas de
laminado unidireccional con secuencia de apilado (0o, 90o, 0o, 90o)s. Habiendo sacado el
material del congelador veinticuatro horas antes de su uso, los pasos en la fabricación son
los siguientes:
• Cortado de ocho láminas cuadradas de 400 x 400 mm2.
• Pegado de las dos primeras láminas (0o, 90o) aplicando sólo vacío en una bolsa
adecuada para el caso. Esta operación se realiza con la ayuda de una bomba
de vacío diseñada y fabricada para estos pequeños niveles de fabricación.
Para facilitar el posterior despegue entre láminas y bolsa se coloca una lámina
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
75
de teflón que actúa de separador. Así mismo también se añade una película
de un tejido esponjoso (breather) que absorbe la resina sobrante.
• Pegado de las dos siguientes capas (0o, 90o) utilizando el mismo
procedimiento.
• Colocación del sensor FBG y del resto de fibra óptica entre capas. Para la
correcta disposición se ayuda de una plantilla elaborada con anterioridad,
Figura 49, donde se puede visualizar el número y las distintas orientaciones de
la fibra óptica embebida.
Figura 49. Plantilla de colocación de la fibra óptica
La propia viscosidad de la resina aún sin curar es suficiente para fijar la fibra
óptica en el panel. La salida de ésta se realiza en mayor parte por el borde del
laminado. No se toman precauciones previas en la salida del laminado pues
no se pretende que, salvo en un caso, sea utilizada como sensor de
deformación. En la Figura 50 se muestra en detalle parte del panel con la fibra
óptica ya colocada. A su vez se opta en dos de ellas sacarlas por la superficie
del laminado con el mismo objetivo de estudiar la posible pérdida de

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
76
características mecánicas en el material huésped. En la Figura 51 se muestra la
salida por la cara del panel una vez apiladas las ocho capas.
Figura 50. Fibra óptica colocada en el panel con salida por los bordes del laminado
Figura 51. Salida de la fibra óptica por una cara del panel
• Apilado de las dos siguientes capas (90o, 0o) aplicando de nuevo vacío al
conjunto. En este paso se toma especial cuidado en la colocación de la quinta

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
77
lámina para no provocar un desplazamiento de las fibras ópticas ya colocadas.
Así mismo se perforan mínimamente para poder dar salida a la fibra óptica
por la superficie del panel.
• Apilado de las dos últimas capas (90o, 0o) siguiendo el mismo procedimiento
expuesto en el punto anterior. El resultado antes de realizar el ciclo de curado
se presenta en la Figura 52.
Figura 52. Panel antes de realizar el ciclo de curado
• Una vez apiladas las ocho capas de las que constará el panel de material
compuesto carbono-epoxi, se procede a prepararlo para ser introducido en la
cámara de altitud donde se realiza el ciclo de curado, Figura 53. Así mismo, se
aplica una presión constante durante todo el ensayo de 0,28 MPa mediante
dos placas con rigidizadores diseñadas para el caso. El apriete correcto entre
ellas se efectúa con ayuda de la máquina Zwick, manteniendo dicha presión a
través de tornillos sobre los rigidizadores, Figura 54.
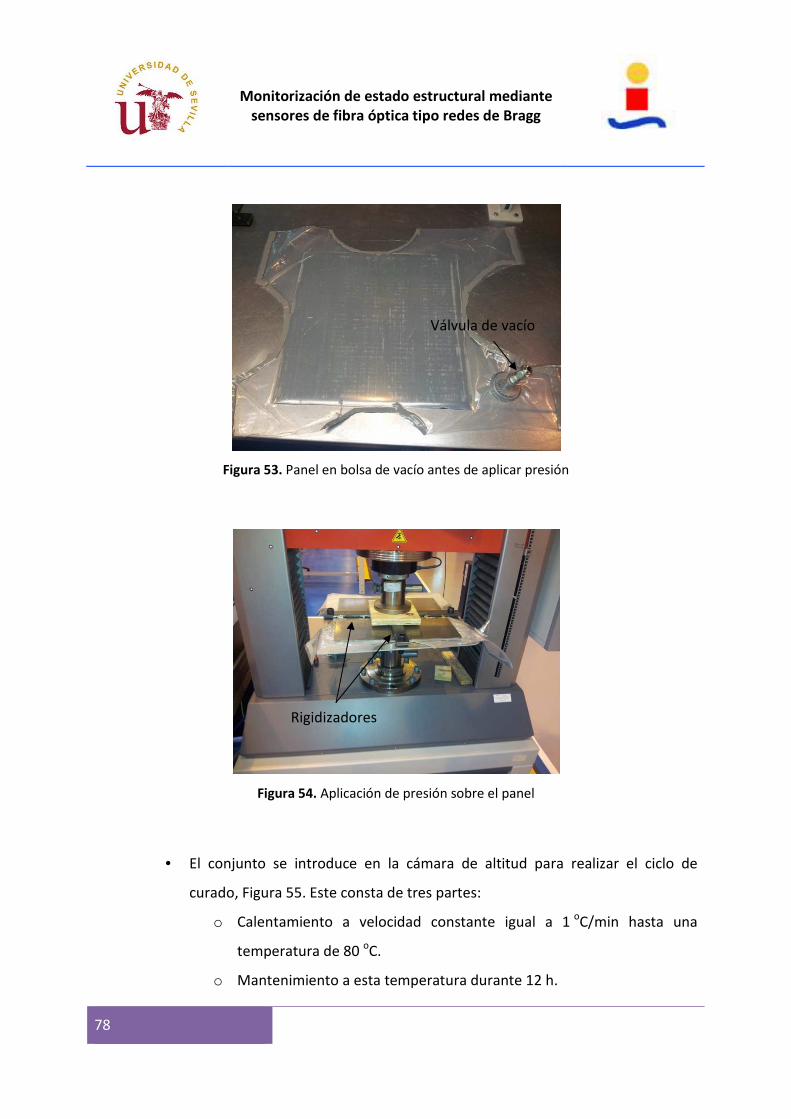
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
78
Figura 53. Panel en bolsa de vacío antes de aplicar presión
Figura 54. Aplicación de presión sobre el panel
• El conjunto se introduce en la cámara de altitud para realizar el ciclo de
curado, Figura 55. Este consta de tres partes:
o Calentamiento a velocidad constante igual a 1 oC/min hasta una
temperatura de 80 oC.
o Mantenimiento a esta temperatura durante 12 h.
Válvula de vacío
Rigidizadores
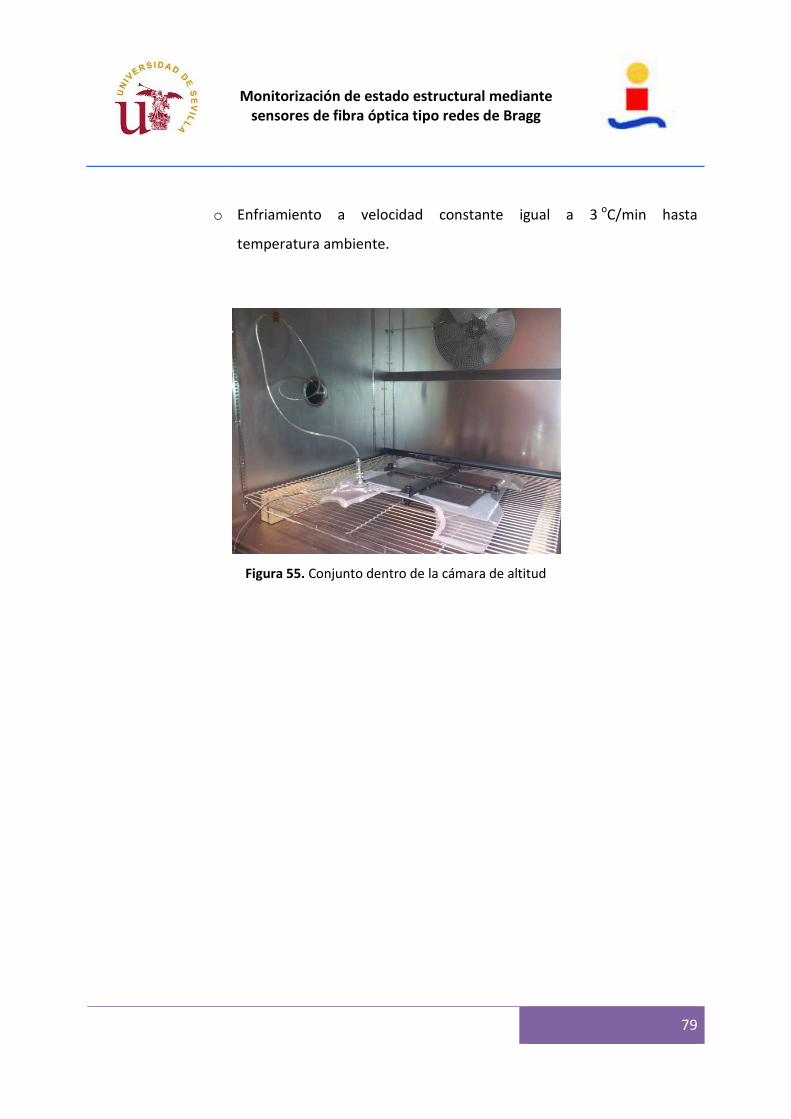
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
79
o Enfriamiento a velocidad constante igual a 3 oC/min hasta
temperatura ambiente.
Figura 55. Conjunto dentro de la cámara de altitud
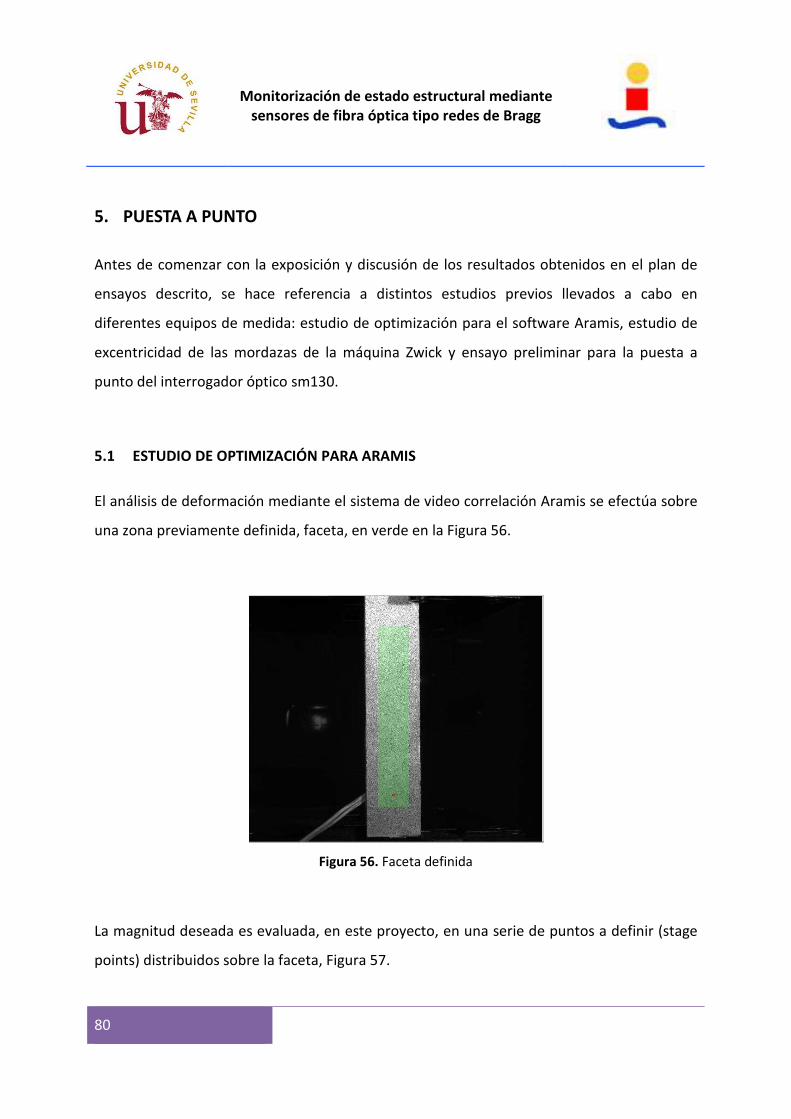
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
80
5. PUESTA A PUNTO
Antes de comenzar con la exposición y discusión de los resultados obtenidos en el plan de
ensayos descrito, se hace referencia a distintos estudios previos llevados a cabo en
diferentes equipos de medida: estudio de optimización para el software Aramis, estudio de
excentricidad de las mordazas de la máquina Zwick y ensayo preliminar para la puesta a
punto del interrogador óptico sm130.
5.1 ESTUDIO DE OPTIMIZACIÓN PARA ARAMIS
El análisis de deformación mediante el sistema de video correlación Aramis se efectúa sobre
una zona previamente definida, faceta, en verde en la Figura 56.
Figura 56. Faceta definida
La magnitud deseada es evaluada, en este proyecto, en una serie de puntos a definir (stage
points) distribuidos sobre la faceta, Figura 57.
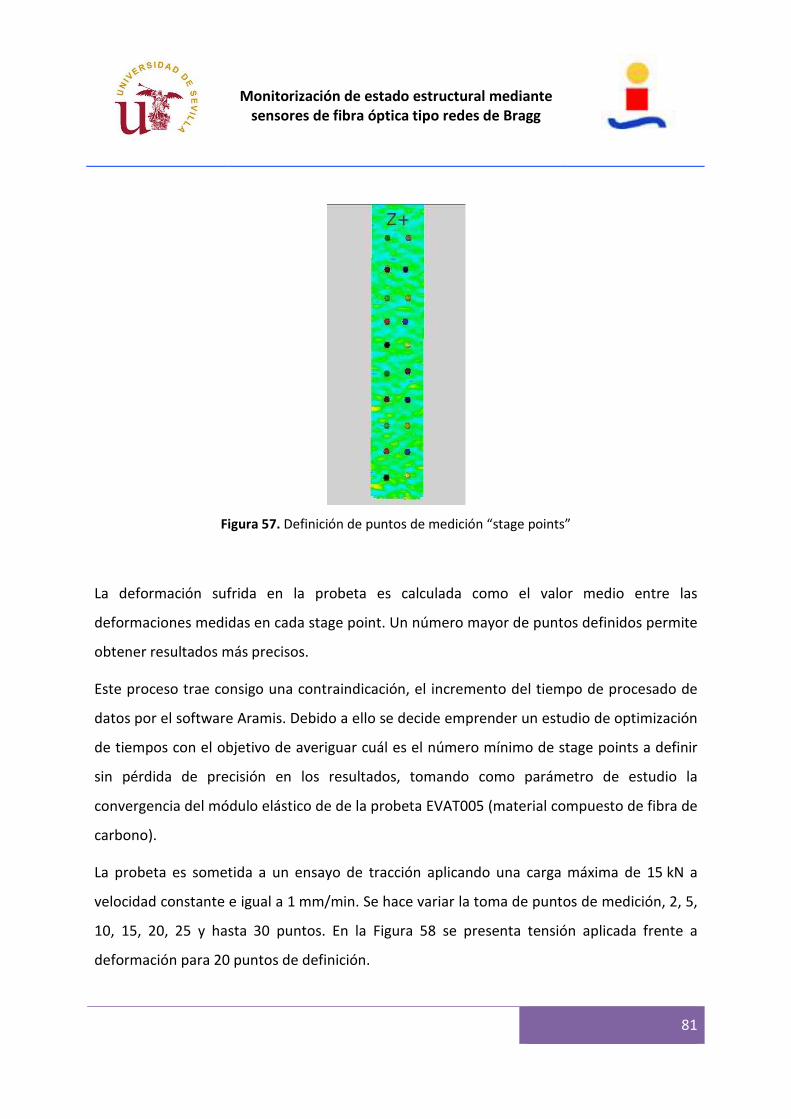
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
81
Figura 57. Definición de puntos de medición “stage points”
La deformación sufrida en la probeta es calculada como el valor medio entre las
deformaciones medidas en cada stage point. Un número mayor de puntos definidos permite
obtener resultados más precisos.
Este proceso trae consigo una contraindicación, el incremento del tiempo de procesado de
datos por el software Aramis. Debido a ello se decide emprender un estudio de optimización
de tiempos con el objetivo de averiguar cuál es el número mínimo de stage points a definir
sin pérdida de precisión en los resultados, tomando como parámetro de estudio la
convergencia del módulo elástico de de la probeta EVAT005 (material compuesto de fibra de
carbono).
La probeta es sometida a un ensayo de tracción aplicando una carga máxima de 15 kN a
velocidad constante e igual a 1 mm/min. Se hace variar la toma de puntos de medición, 2, 5,
10, 15, 20, 25 y hasta 30 puntos. En la Figura 58 se presenta tensión aplicada frente a
deformación para 20 puntos de definición.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
82
Figura 58. Optimización Aramis 20 puntos
Se percibe una fuerte dispersión en los resultados obtenidos. Dos métodos diferentes han
sido utilizados para extraer la curva σ vs ε: recta de regresión e interpolación por splines,
mostrándose eficaz solo el primero de ellos, dada la alta linealidad del comportamiento del
material compuesto, Figura 59, habiéndose obtenido para el caso de 20 puntos una recta
con un coeficiente de correlación igual a 0,9928.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
83
Figura 59. Ajuste por regresión
El coeficiente de correlación obtenido para cada toma de puntos dentro de este ensayo se
representa en la Figura 60.
Figura 60. Coeficiente de correlación para diferentes tomas de puntos de medida
0.94
0.95
0.96
0.97
0.98
0.99
1
0 5 10 15 20 25 30 35
Co
efi
cie
nte
de
co
rre
laci
ón
Nº de stage points

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
84
Se aprecia que conforme aumenta la toma de puntos de definición, más preciso se muestra
el ajuste por regresión, situándose en valores superiores a 0,99 a partir de veinte stage
points.
La pendiente de la recta obtenida representa el módulo elástico del material. Su valor ha
sido obtenido para los distintos números de puntos de medida y representado en la Figura
61.
Figura 61. Convergencia del módulo elástico
Se observa en el gráfico valores dispares de E con pocos puntos de definición. A partir de 20
puntos empieza a converger a 64 GPa aproximadamente. El valor del módulo elástico
obtenido a partir de mediciones con galgas extensométricas es de 66,5 GPa, situándose el
error cometido dentro del margen que nos ofrece el software Aramis como se observará en
comparaciones posteriores. Por tanto, 20 puntos de definición son considerados suficientes
para obtener mediciones aceptables en futuros ensayos.
57
58
59
60
61
62
63
64
65
66
67
0 5 10 15 20 25 30 35
E (G
Pa)
Nº de stage points

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
85
5.2 ESTUDIO DE EXCENTRICIDAD DE LAS MORDAZAS DE LA MÁQUINA ZWICK
Previo a cometer ensayos mecánicos con la máquina universal Zwick, es necesario
cerciorarse del correcto alineamiento entre mordazas de su útil de tracción, aspecto
recogido en la norma ASTM D3039.
Para ello se ha empleado la probeta de aluminio designada con el código SHMT001,
debidamente instrumentada para la comprobación (ver Preparación de probetas en Ensayo
T_FBGvsSG_SHMT001).
La probeta es sometida a tracción lo suficiente para producir deformaciones superiores a
1000 µε en la zona de medida. Si no se sobrepasa este límite la prueba no se considera
representativa.
En la comprobación, se calculan los momentos de flexión en ejes contenidos en la sección
transversal de la probeta con las siguientes expresiones:
CD � ,EF − 5 ,EF ∗ 100 (�A. H)
CI � 4 3⁄ ∗ ( 7 − K) ,EF ∗ 100 (�A. ��)
Donde:
By = Momento flector sobre el eje y (perpendicular al canto de la probeta) (%)
Bz = Momento flector sobre el eje z (perpendicular a la cara de la probeta) (%)
ε1, ε2 y ε3 = Deformación longitudinal medidas por las galgas 1, 2 y 3 (ver Figura 42)
respectivamente (µε)
εave = ((ε1 + ε2)/2 + ε3)/2
Estos valores deben ser menores del 5 % en valor absoluto. Un sistema que presente valores
superiores debe ser reajustado o modificado.
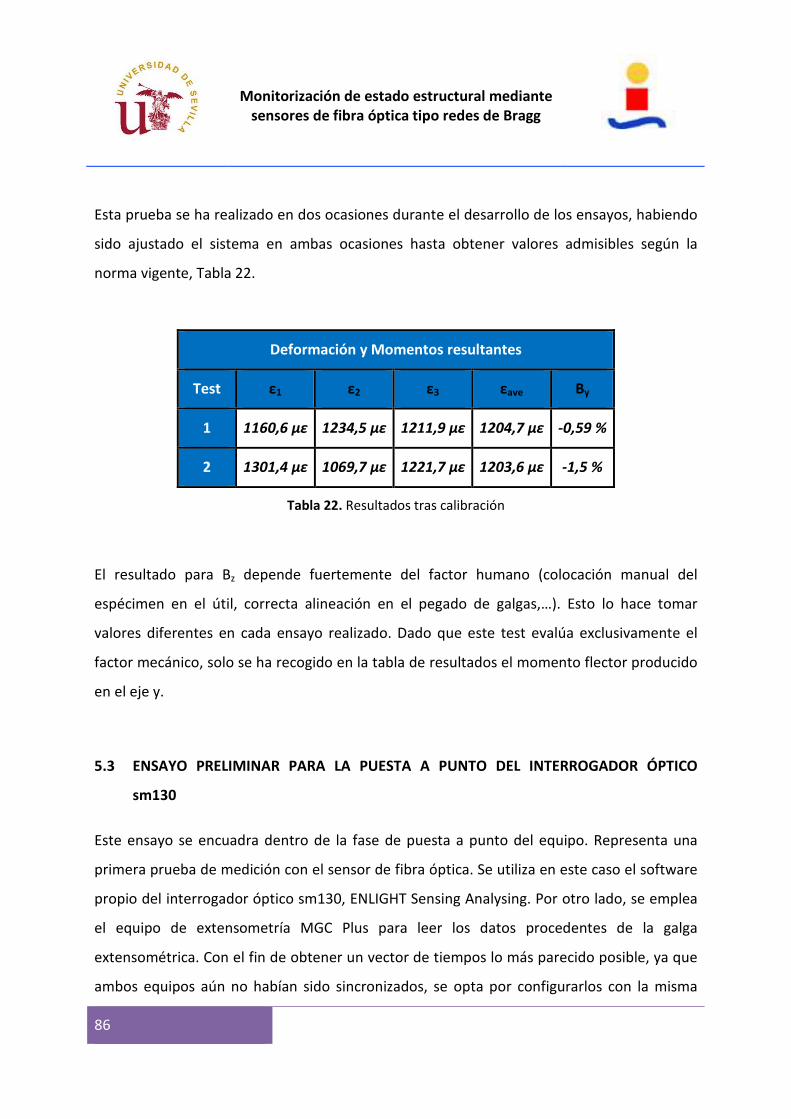
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
86
Esta prueba se ha realizado en dos ocasiones durante el desarrollo de los ensayos, habiendo
sido ajustado el sistema en ambas ocasiones hasta obtener valores admisibles según la
norma vigente, Tabla 22.
Deformación y Momentos resultantes
Test ε1 ε2 ε3 εave By
1 1160,6 µε 1234,5 µε 1211,9 µε 1204,7 µε -0,59 %
2 1301,4 µε 1069,7 µε 1221,7 µε 1203,6 µε -1,5 %
Tabla 22. Resultados tras calibración
El resultado para Bz depende fuertemente del factor humano (colocación manual del
espécimen en el útil, correcta alineación en el pegado de galgas,…). Esto lo hace tomar
valores diferentes en cada ensayo realizado. Dado que este test evalúa exclusivamente el
factor mecánico, solo se ha recogido en la tabla de resultados el momento flector producido
en el eje y.
5.3 ENSAYO PRELIMINAR PARA LA PUESTA A PUNTO DEL INTERROGADOR ÓPTICO
sm130
Este ensayo se encuadra dentro de la fase de puesta a punto del equipo. Representa una
primera prueba de medición con el sensor de fibra óptica. Se utiliza en este caso el software
propio del interrogador óptico sm130, ENLIGHT Sensing Analysing. Por otro lado, se emplea
el equipo de extensometría MGC Plus para leer los datos procedentes de la galga
extensométrica. Con el fin de obtener un vector de tiempos lo más parecido posible, ya que
ambos equipos aún no habían sido sincronizados, se opta por configurarlos con la misma

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
87
frecuencia de adquisición de datos, 50 Hz. Así mismo, cada uno de ellos es ejecutado en el
mismo instante de tiempo. Ambos archivos de datos se procesan con Matlab para visualizar
los resultados.
La probeta empleada no ha sido catalogada anteriormente. Se trata de un espécimen del
mismo aluminio que el utilizado en ensayos de tracción y flexión. En esta ocasión se opta por
adherir un sensor FBG por una de las caras de las probetas mientras que por la contraria se
fija una galga extensométrica roseta, Figura 62.
Figura 62. Probeta de aluminio para ensayo preliminar (a) FBGS (b) RSG
El ensayo en sí consiste en traccionar la probeta mediante la máquina de ensayos Zwick
hasta una carga (35 kN) inferior pero cercana a la equivalente tensión de límite elástico
(110 - 170 MPa) pero nunca sobrepasándola (de esta forma se asegura el comportamiento
elástico del material). Una vez alcanzada, se mantiene durante unos instantes de tiempo
hasta finalizar la recogida de datos.
En la Figura 63 se muestran los resultados obtenidos para el primer ensayo en el que se
compara la tecnología basada en sensores de fibra óptica frente a sistemas de medida
(a) (b)
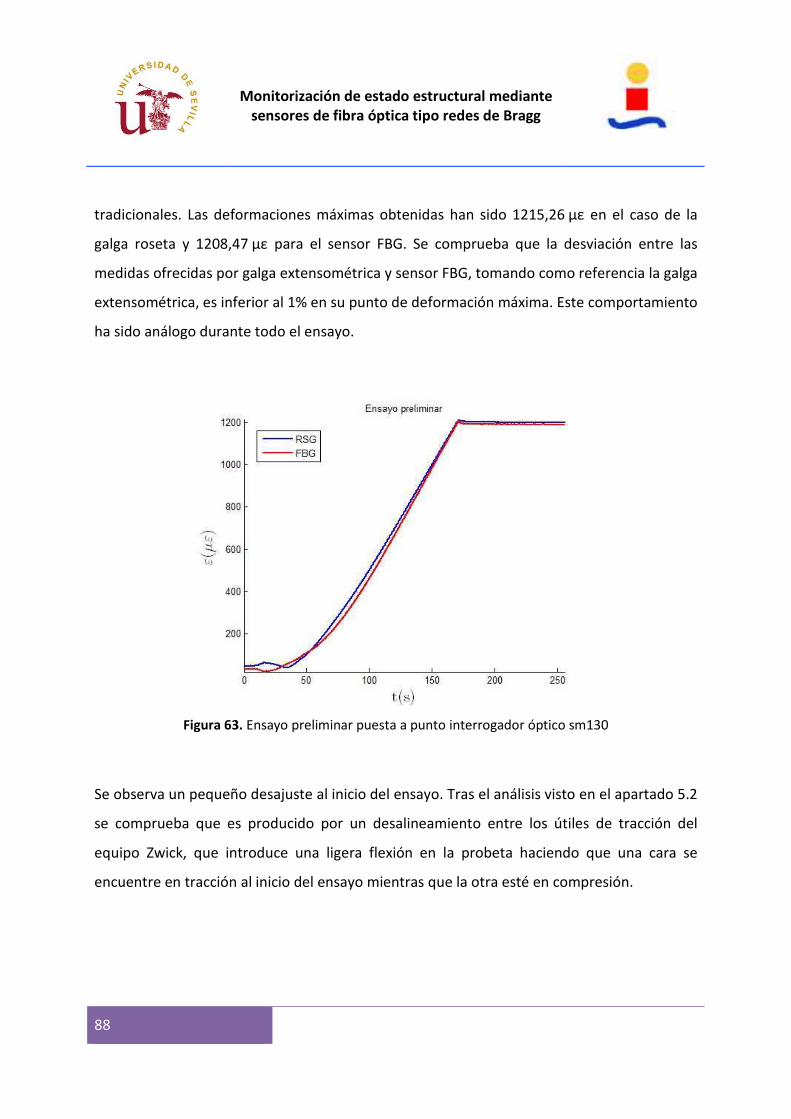
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
88
tradicionales. Las deformaciones máximas obtenidas han sido 1215,26 µε en el caso de la
galga roseta y 1208,47 µε para el sensor FBG. Se comprueba que la desviación entre las
medidas ofrecidas por galga extensométrica y sensor FBG, tomando como referencia la galga
extensométrica, es inferior al 1% en su punto de deformación máxima. Este comportamiento
ha sido análogo durante todo el ensayo.
Figura 63. Ensayo preliminar puesta a punto interrogador óptico sm130
Se observa un pequeño desajuste al inicio del ensayo. Tras el análisis visto en el apartado 5.2
se comprueba que es producido por un desalineamiento entre los útiles de tracción del
equipo Zwick, que introduce una ligera flexión en la probeta haciendo que una cara se
encuentre en tracción al inicio del ensayo mientras que la otra esté en compresión.
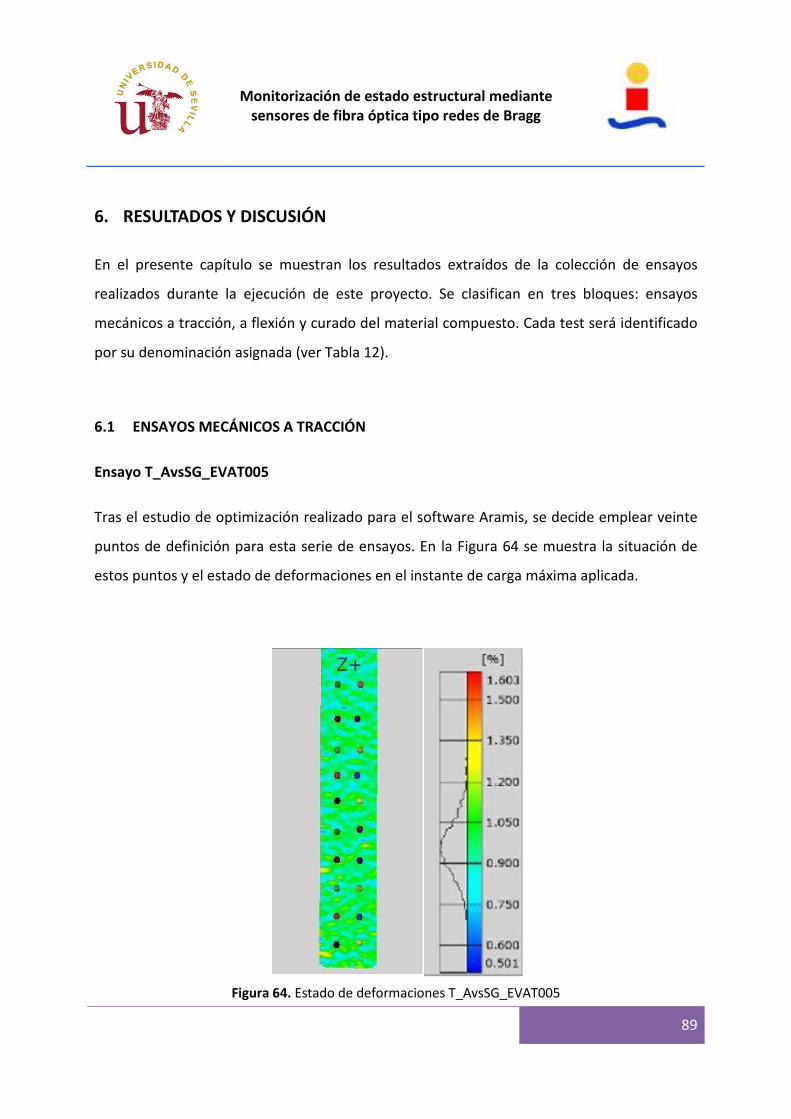
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
89
6. RESULTADOS Y DISCUSIÓN
En el presente capítulo se muestran los resultados extraídos de la colección de ensayos
realizados durante la ejecución de este proyecto. Se clasifican en tres bloques: ensayos
mecánicos a tracción, a flexión y curado del material compuesto. Cada test será identificado
por su denominación asignada (ver Tabla 12).
6.1 ENSAYOS MECÁNICOS A TRACCIÓN
Ensayo T_AvsSG_EVAT005
Tras el estudio de optimización realizado para el software Aramis, se decide emplear veinte
puntos de definición para esta serie de ensayos. En la Figura 64 se muestra la situación de
estos puntos y el estado de deformaciones en el instante de carga máxima aplicada.
Figura 64. Estado de deformaciones T_AvsSG_EVAT005
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
90
Debido a la fuerte dispersión que introduce Aramis en sus resultados, se desestima la
deformación máxima como parámetro de estudio. Así, la discusión de los resultados se
centra exclusivamente en el estudio del módulo elástico. La expresión necesaria para su
cálculo se indica en la norma ASTM D3039 para ensayos mecánicos a tracción:
: � �L� (�A. ��)
Donde:
E = Módulo de elasticidad a tracción (GPa)
Δσ = Diferencia de tensión aplicada entre dos puntos de deformación correspondientes a
1000 y 3000 µε (MPa)
Δε = Diferencia de deformaciones entre dichos puntos (normalmente 0,002 ε)
Anteriormente se ha comprobado como el ajuste por regresión representa muy
aceptablemente la curva tensión vs deformación. En la Tabla 23 se muestran los parámetros
de regresión en cada uno de los cuatro ensayos realizados junto con el valor del módulo de
Young ofrecido por Aramis y el obtenido de la lectura de la galga extensométrica. Así mismo
se calcula el error relativo cometido por Aramis frente a la galga extensométrica con la
siguiente expresión:
M � N − OP OP ∗ 100 (�A. ��)
Donde:
ϵ = Error relativo (%)
εA = Deformación medida por Aramis
εSG = Deformación medida por galga extensométrica
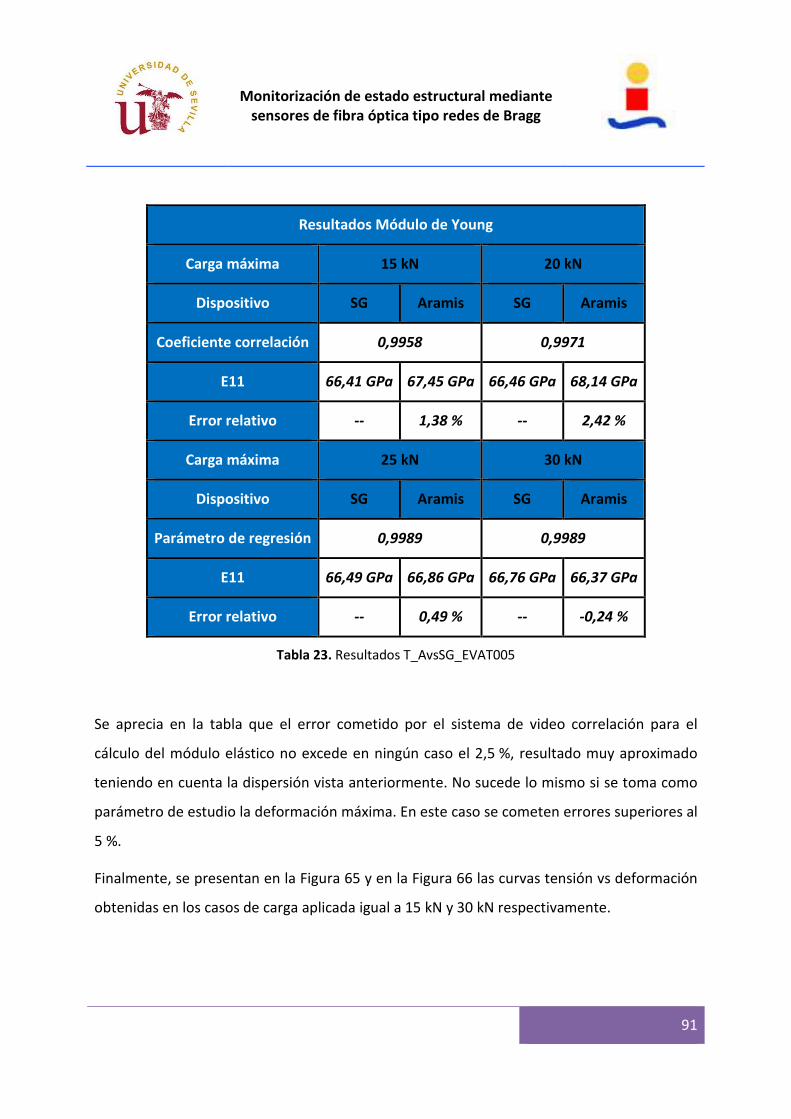
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
91
Resultados Módulo de Young
Carga máxima 15 kN 20 kN
Dispositivo SG Aramis SG Aramis
Coeficiente correlación 0,9958 0,9971
E11 66,41 GPa 67,45 GPa 66,46 GPa 68,14 GPa
Error relativo -- 1,38 % -- 2,42 %
Carga máxima 25 kN 30 kN
Dispositivo SG Aramis SG Aramis
Parámetro de regresión 0,9989 0,9989
E11 66,49 GPa 66,86 GPa 66,76 GPa 66,37 GPa
Error relativo -- 0,49 % -- -0,24 %
Tabla 23. Resultados T_AvsSG_EVAT005
Se aprecia en la tabla que el error cometido por el sistema de video correlación para el
cálculo del módulo elástico no excede en ningún caso el 2,5 %, resultado muy aproximado
teniendo en cuenta la dispersión vista anteriormente. No sucede lo mismo si se toma como
parámetro de estudio la deformación máxima. En este caso se cometen errores superiores al
5 %.
Finalmente, se presentan en la Figura 65 y en la Figura 66 las curvas tensión vs deformación
obtenidas en los casos de carga aplicada igual a 15 kN y 30 kN respectivamente.
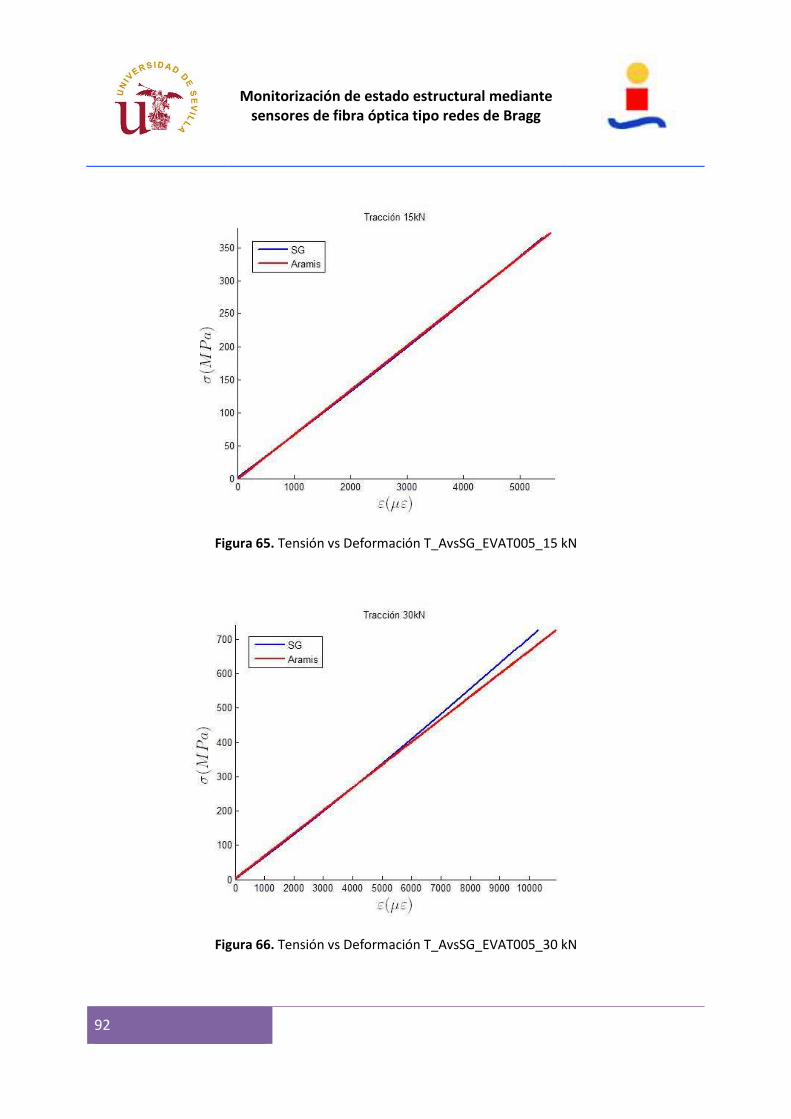
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
92
Figura 65. Tensión vs Deformación T_AvsSG_EVAT005_15 kN
Figura 66. Tensión vs Deformación T_AvsSG_EVAT005_30 kN

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
93
Se aprecia en sendos casos el comportamiento lineal de la fibra de carbono. En la primera de
ellas, ambas curvas prácticamente se superponen. La segunda en cambio no muestra tal
exactitud. Sin embargo, el error relativo cometido en este es menor. Este hecho se entiende
observando detenidamente el rango donde se evalúa el módulo elástico (entre 1000 y
3000 µε). Puede observarse que la pendiente de las rectas en este tramo es casi idéntica.
Ensayo T_AvsSG_EVAT054
Con el fin de disminuir la fuerte dispersión de datos ofrecida por Aramis, se opta en esta
serie de ensayos tomar treinta puntos de definición, de manera que la superficie de medida
quede mejor cubierta. En la Figura 67 se observa la distribución de dichos puntos en una
imagen correspondiente al estado de deformaciones en el instante de máxima carga.
A pesar de ello la problemática sigue existiendo, como puede verse en la Figura 68, donde se
representan los datos experimentales de tensión y deformación extraídos del archivo de
Aramis junto a su ajuste por regresión.
Figura 67. Estado de deformaciones T_AvsSG_EVAT054
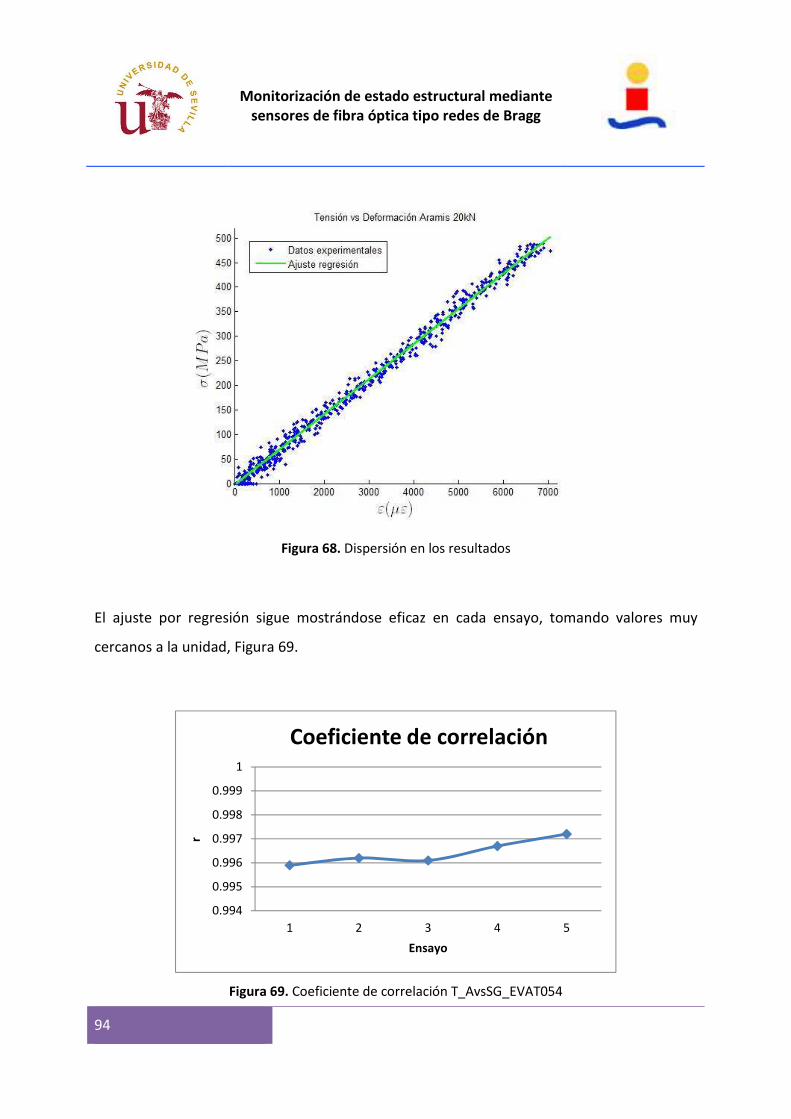
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
94
Figura 68. Dispersión en los resultados
El ajuste por regresión sigue mostrándose eficaz en cada ensayo, tomando valores muy
cercanos a la unidad, Figura 69.
Figura 69. Coeficiente de correlación T_AvsSG_EVAT054
0.994
0.995
0.996
0.997
0.998
0.999
1
1 2 3 4 5
r
Ensayo
Coeficiente de correlación

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
95
Finalmente se presentan los resultados obtenidos en dos de esta serie de cinco ensayos,
todos ellos realizados en las mismas condiciones, Figura 70 y Figura 71.
Figura 70. Tensión vs Deformación T_AvsSG_EVAT054 (2)
Figura 71. Tensión vs Deformación T_AvsSG_EVAT054 (3)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
96
Se observa en general una buena concordancia en los resultados obtenidos. Los datos
correspondientes a la descarga automática por el controlador de la máquina Zwick han sido
eliminados.
Nuevamente, las deformaciones máximas resultantes de ambos sistemas de medida se
muestran muy dispares, situándose el error relativo en alguno de los ensayos incluso por
encima del 10 %. Por este motivo, solo se presentan en la Tabla 24 el valor del módulo
elástico obtenido en cada ensayo junto con el error relativo cometido en la medida con
Aramis frente a la tomada como referencia (galga extensométrica).
Resultados del Módulo de Young
Nº de ensayo 1 2 3
Eq. de medida SG Aramis SG Aramis SG Aramis
E11 71,16 GPa 67,59 GPa 69,86 GPa 70,37 GPa 71,2 GPa 71,68 GPa
Error relativo -- -5,02 % -- 0,73 % -- 0,67 %
Nº de ensayo 4 5
Eq. de medida SG Aramis SG Aramis
E11 71,2 GPa 70 GPa 71,2 GPa 67,55 GPa
Error relativo -- -1,69 % -- -5,12 %
Tabla 24. Resultados T_AvsSG_EVAT054
Atendiendo a la tabla, se comprueba la fiabilidad en la medida de las galgas
extensométricas, que salvo en el segundo ensayo siempre resulta un valor del módulo de
Young en torno a 71,2 GPa. No se muestra ni mucho menos igual de preciso el resultado

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
97
ofrecido por el sistema de video correlación, llegando a darse un error del 5 % en dos de los
ensayos realizados. El valor medio del modulo elástico ofrecido por Aramis resulta en
69,44 GPa, representando un error del 2,5 % frente a la magnitud real y situándose el valor
de la desviación estándar en 1,82 GPa.
Ensayo T_FBGvsSG_SHMT001
Es esta la primera de las pruebas mecánicas a tracción en las que se comparan las medidas
tomadas por un sensor de fibra óptica tipo redes de Bragg con galgas extensométricas una
vez llevado a cabo el centralizado de los respectivos equipos de medida.
En la medida de deformaciones con sensores FBG se necesita interpretar la longitud de onda
medida por el interrogador óptico. Se ha visto en el estado del arte el fundamento físico en
el que se basa esta tecnología, que permite obtener directamente deformaciones mediante
la siguiente expresión:
� 10R ∗ � S⁄TU (�A. �$)
Donde:
ε = Deformación (µε)
Δλ = λ - λB Incremento de longitud onda (nm)
λB = Longitud de onda de Bragg (nm)
Fg = Factor del sensor FBG (ε-1)
La longitud de onda de Bragg y el factor denominado Fg son magnitudes exclusivas de cada
sensor FBG utilizado y especificadas por el fabricante, aunque no directamente en el
segundo caso. Los sensores FBG poseen una sensibilidad a deformación que suele tener un
valor de 1,2 pm/def. El cálculo de Fg pasa por dividir esta magnitud entre la longitud de onda

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
98
de Bragg, comprendida entre 1510-1590 nm, resultando un valor cercano a 0,78 ε-1. De
hecho este valor es asumido como tal en el caso de desconocimiento de datos de
procedencia del sensor FBG.
En la Figura 72 se representan en una misma gráfica las curvas σ vs ε obtenidas por los
diferentes dispositivos de medida. Con el nombre de SGM se identifica el valor medio por las
galgas 1 y 2 (ver Figura 42) y calculado con la siguiente expresión:
VWX � VW1 + VW22
Figura 72. Tensión vs Deformación T_FBGvsSG_SHMT001
El resultado ofrecido por el sensor FBG pegado sobre una superficie de aluminio se muestra
casi inmejorable. Se puede apreciar en la gráfica, observando la casi superposición de las
rectas SGM (azul) y SG3 (verde), el correcto alineamiento entre los elementos de sujeción de
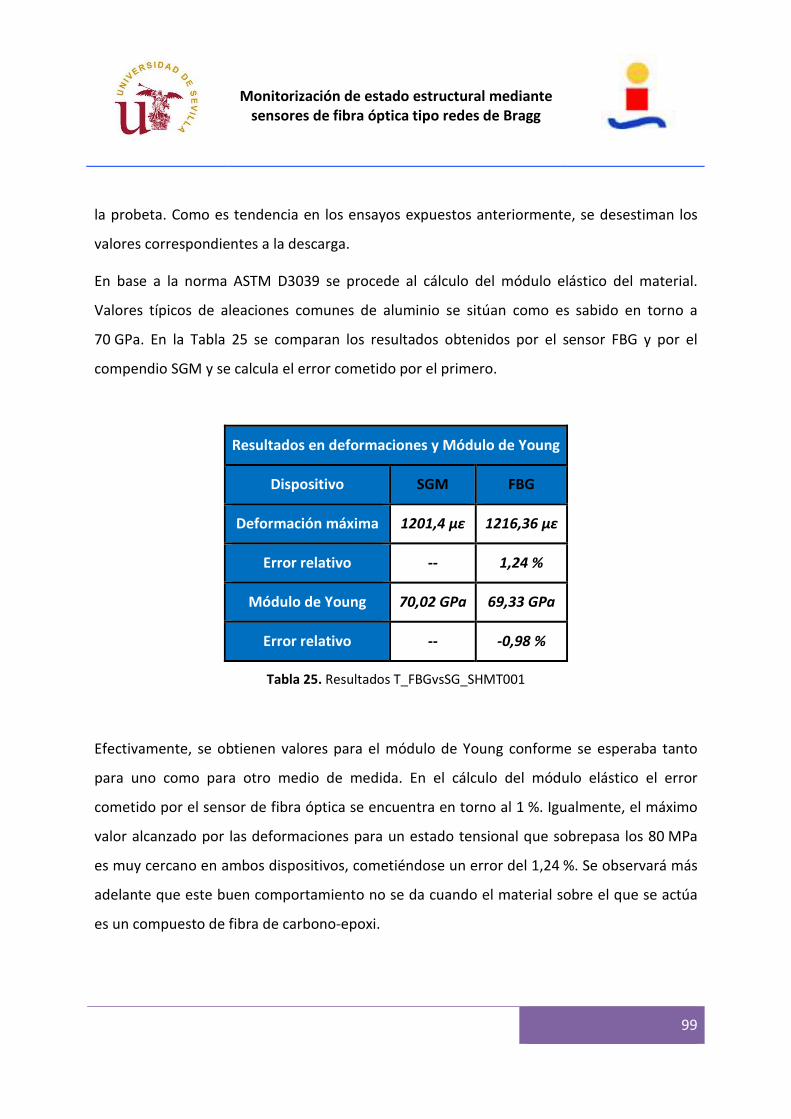
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
99
la probeta. Como es tendencia en los ensayos expuestos anteriormente, se desestiman los
valores correspondientes a la descarga.
En base a la norma ASTM D3039 se procede al cálculo del módulo elástico del material.
Valores típicos de aleaciones comunes de aluminio se sitúan como es sabido en torno a
70 GPa. En la Tabla 25 se comparan los resultados obtenidos por el sensor FBG y por el
compendio SGM y se calcula el error cometido por el primero.
Resultados en deformaciones y Módulo de Young
Dispositivo SGM FBG
Deformación máxima 1201,4 µε 1216,36 µε
Error relativo -- 1,24 %
Módulo de Young 70,02 GPa 69,33 GPa
Error relativo -- -0,98 %
Tabla 25. Resultados T_FBGvsSG_SHMT001
Efectivamente, se obtienen valores para el módulo de Young conforme se esperaba tanto
para uno como para otro medio de medida. En el cálculo del módulo elástico el error
cometido por el sensor de fibra óptica se encuentra en torno al 1 %. Igualmente, el máximo
valor alcanzado por las deformaciones para un estado tensional que sobrepasa los 80 MPa
es muy cercano en ambos dispositivos, cometiéndose un error del 1,24 %. Se observará más
adelante que este buen comportamiento no se da cuando el material sobre el que se actúa
es un compuesto de fibra de carbono-epoxi.
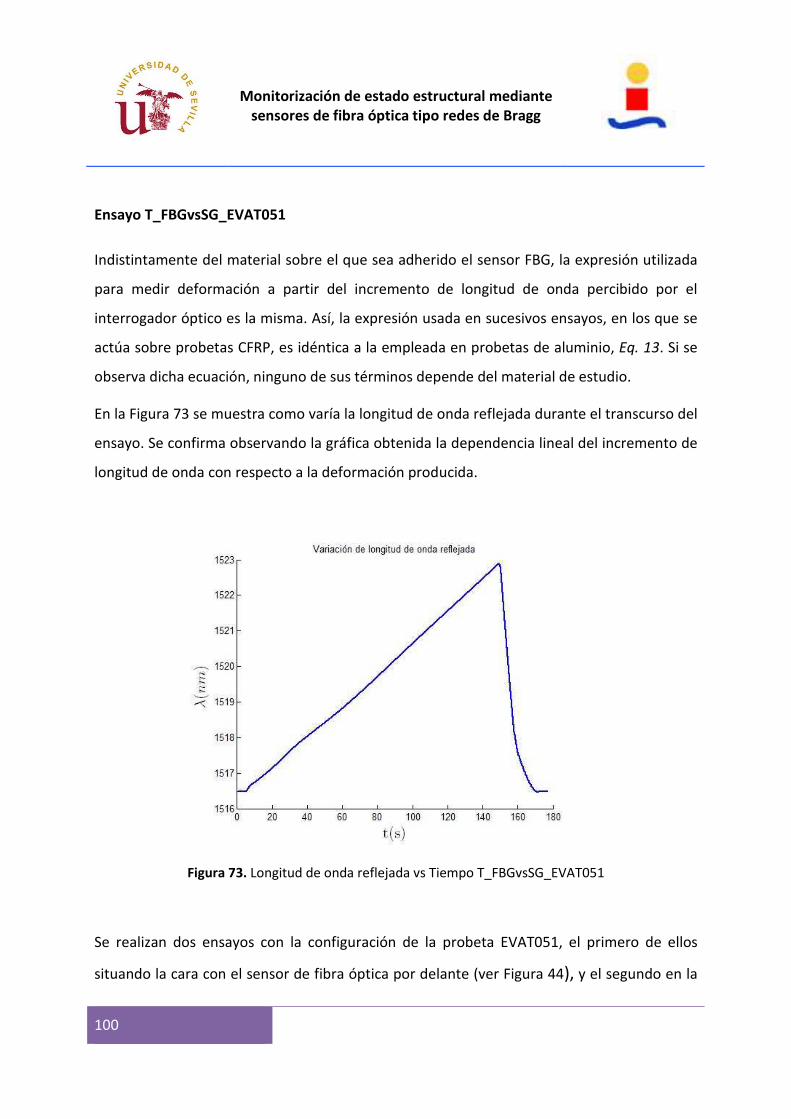
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
100
Ensayo T_FBGvsSG_EVAT051
Indistintamente del material sobre el que sea adherido el sensor FBG, la expresión utilizada
para medir deformación a partir del incremento de longitud de onda percibido por el
interrogador óptico es la misma. Así, la expresión usada en sucesivos ensayos, en los que se
actúa sobre probetas CFRP, es idéntica a la empleada en probetas de aluminio, Eq. 13. Si se
observa dicha ecuación, ninguno de sus términos depende del material de estudio.
En la Figura 73 se muestra como varía la longitud de onda reflejada durante el transcurso del
ensayo. Se confirma observando la gráfica obtenida la dependencia lineal del incremento de
longitud de onda con respecto a la deformación producida.
Figura 73. Longitud de onda reflejada vs Tiempo T_FBGvsSG_EVAT051
Se realizan dos ensayos con la configuración de la probeta EVAT051, el primero de ellos
situando la cara con el sensor de fibra óptica por delante (ver Figura 44), y el segundo en la

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
101
situación inversa (ver Figura 43), es decir colocando la cara opuesta por delante. Se decide
superponer los resultados en una misma gráfica para así visualizar de una forma más clara la
no dependencia de las medidas con la colocación de la probeta, quedando demostrado así el
no desalineamiento entre las mordazas del útil de tracción.
En la Figura 74 se presenta la tensión aplicada en el ensayo frente a las deformaciones
obtenidas por los distintos dispositivos en uno y otro ensayo. La asignación “1” hace
referencia al ensayo en el que el sensor FBG se sitúa de frente mientras que la asignación “2”
representa la colocación inversa.
Figura 74. Tensión vs Deformación T_FBGvsSG_EVAT051
Efectivamente, los resultados obtenidos son idénticos independientemente de la situación
de la probeta en el útil de tracción.
Empieza a observarse una tendencia común en el empleo de sensores de fibra óptica sobre
fibra de carbono. Mientras que sobre aluminio no se apreciaban diferencias significativas en

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
102
la medida, en fibra de carbono se observará, en cada uno de los ensayos mostrados en
posteriores apartados, un error relativo frente a la medida ofrecida por la galga
extensométrica en torno al 5-6 % tanto en las deformaciones máximas obtenidas como en el
cálculo del módulo de Young.
En la Figura 74 se presentan los resultados obtenidos para este ensayo concreto.
Resultados en deformaciones y Módulo de Young
Colocación Fibra por delante Fibra por detrás
Dispositivo SG FBG SG FBG
Def. máxima 5017,43 µε 5341,39 µε 5006,8 µε 5321,94 µε
Error relativo -- 6,46 % -- 6,29 %
E11 71,73 GPa 67,36 GPa 71,79 GPa 67,46 GPa
Error relativo -- -6,1 % -- -6,03 %
Tabla 26. Resultados T_FBGvsSG_EVAT051
En ambos casos, el sensor de fibra óptica tipo redes de Bragg mide alrededor de 300 µε por
encima de lo que mide la galga extensométrica cuando se ha sometido a la probeta a una
carga que no supone ni siquiera la mitad de la carga de rotura del material. El motivo por el
que se detiene el ensayo para un nivel de 5000 µε alcanzadas es el límite de operatividad del
sensor FBG utilizado. En ese momento, el error relativo cometido alcanza valores superiores
al 6 %. Igualmente, el módulo elástico calculado según se especifica en la norma ASTM
D3039 alcanza valores inferiores para el sensor de fibra óptica, cometiéndose un error de
orden similar.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
103
Ensayo T_FBGvsSG_EVAT053
Con la configuración del instrumentado de la probeta EVAT053 se pretende corregir el error
relativo cometido por la medida del sensor FBG en el ensayo inmediatamente anterior, pues
se piensa que pudiera deberse a la propia anisotropía del material. No obstante se desmonta
esta teoría al observar la Figura 75, donde se representa la tensión aplicada frente a la
deformación medida por los dispositivos. En ella se aprecia la misma tendencia vista
anteriormente.
Figura 75. Tensión vs Deformación T_FBGvsSG_EVAT053 (1)
En la Figura 76 se representa la misma gráfica obtenida de un segundo ensayo llevado a cabo
en las mismas condiciones que el primero.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
104
Figura 76. Tensión vs Deformación T_FBGvsSG_EVAT053 (2)
Ambos dispositivos de medida representan con exactitud el comportamiento lineal del
compuesto CFRP en el régimen de carga. Sin embargo, el sensor FBG mide deformaciones,
durante la totalidad del ensayo, relativamente superiores a la galga extensométrica. Los
datos correspondientes a la descarga han sido eliminados durante el procesado de datos con
el software Matlab.
En la Tabla 27 se resumen los resultados obtenidos en sendos ensayos, mostrándose los
valores de módulo elástico y deformación máxima definitivos, así como el error relativo
cometido.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
105
Resultados en deformaciones y Módulo de Young
Ensayo 1 2
Dispositivo SG FBG SG FBG
Def. máxima 5195 µε 5573,15 µε 5199,02 µε 5542,43 µε
Error relativo -- 7,28 % -- 6,6 %
E11 69,98 GPa 65,24 GPa 69,99 GPa 65,52 GPa
Error relativo -- -6,77 % -- -6,4 %
Tabla 27. Resultados T_FBGvsSG_EVAT053
Habiendo llegado aproximadamente al mismo estado tensional que en el ensayo sobre la
probeta EVAT051 (con galga y sensor FBG en caras enfrentadas) se vuelven a producir
errores del mismo orden. Las deformaciones máximas que mide el sensor FBG son
aproximadamente 5550 µε mientras que la galga extensométrica mide del orden de
5200 µε. El módulo de Young determinado por la galga extensométrica es de 70 GPa
quedándose el valor medido con el sensor de fibra óptica por debajo, con un error cercano al
7 %.
A la vista de los resultados parece indicar que el problema no radica en la situación de los
dispositivos de medida sobre la probeta, y por consiguiente, en efectos de anisotropía del
material.
Ensayo T_FBGvsSG_EVAT054
Se recuerda que la probeta EVAT054 está instrumentada con dos galgas extensométricas
equidistantes de un sensor FBG localizado en la línea central longitudinal de una de las
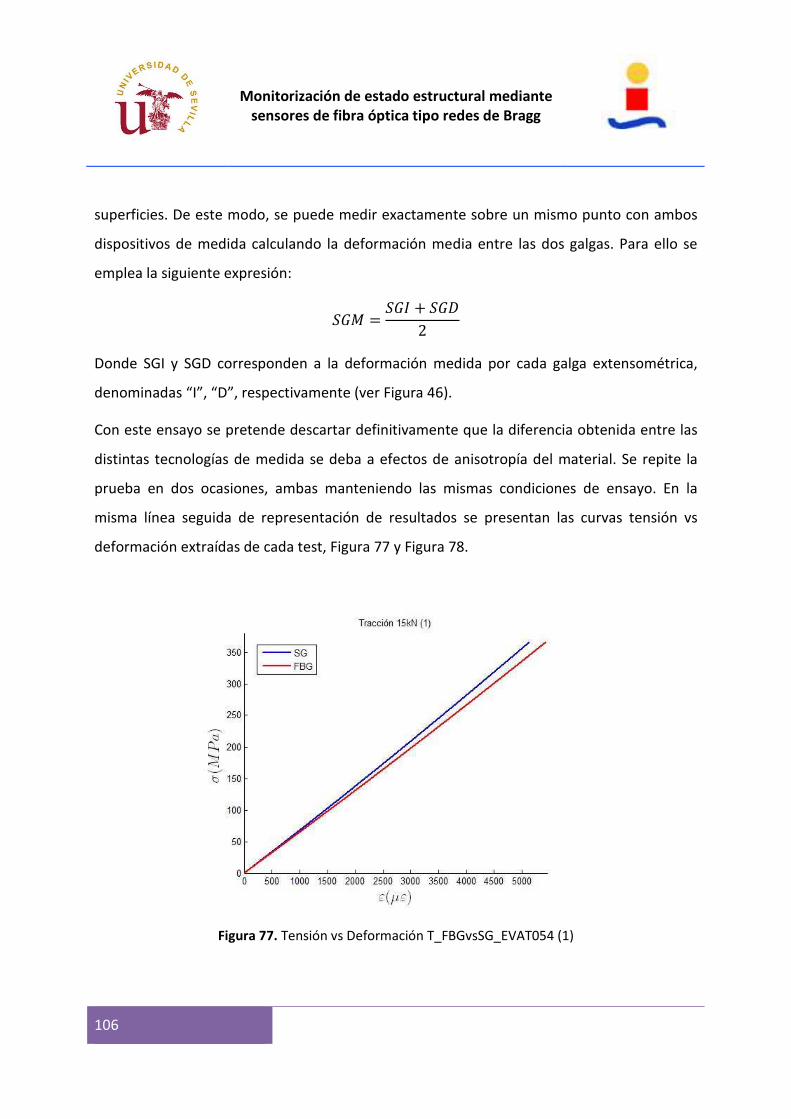
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
106
superficies. De este modo, se puede medir exactamente sobre un mismo punto con ambos
dispositivos de medida calculando la deformación media entre las dos galgas. Para ello se
emplea la siguiente expresión:
VWX � VW@ + VWY2
Donde SGI y SGD corresponden a la deformación medida por cada galga extensométrica,
denominadas “I”, “D”, respectivamente (ver Figura 46).
Con este ensayo se pretende descartar definitivamente que la diferencia obtenida entre las
distintas tecnologías de medida se deba a efectos de anisotropía del material. Se repite la
prueba en dos ocasiones, ambas manteniendo las mismas condiciones de ensayo. En la
misma línea seguida de representación de resultados se presentan las curvas tensión vs
deformación extraídas de cada test, Figura 77 y Figura 78.
Figura 77. Tensión vs Deformación T_FBGvsSG_EVAT054 (1)
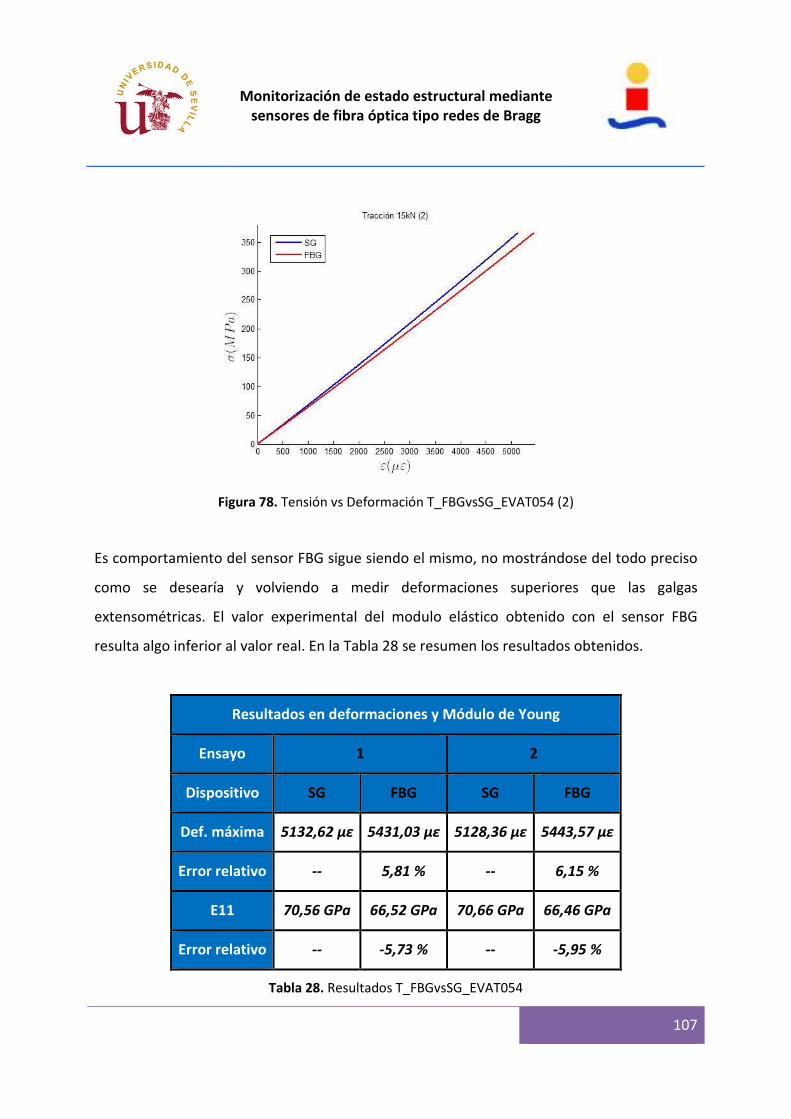
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
107
Figura 78. Tensión vs Deformación T_FBGvsSG_EVAT054 (2)
Es comportamiento del sensor FBG sigue siendo el mismo, no mostrándose del todo preciso
como se desearía y volviendo a medir deformaciones superiores que las galgas
extensométricas. El valor experimental del modulo elástico obtenido con el sensor FBG
resulta algo inferior al valor real. En la Tabla 28 se resumen los resultados obtenidos.
Resultados en deformaciones y Módulo de Young
Ensayo 1 2
Dispositivo SG FBG SG FBG
Def. máxima 5132,62 µε 5431,03 µε 5128,36 µε 5443,57 µε
Error relativo -- 5,81 % -- 6,15 %
E11 70,56 GPa 66,52 GPa 70,66 GPa 66,46 GPa
Error relativo -- -5,73 % -- -5,95 %
Tabla 28. Resultados T_FBGvsSG_EVAT054
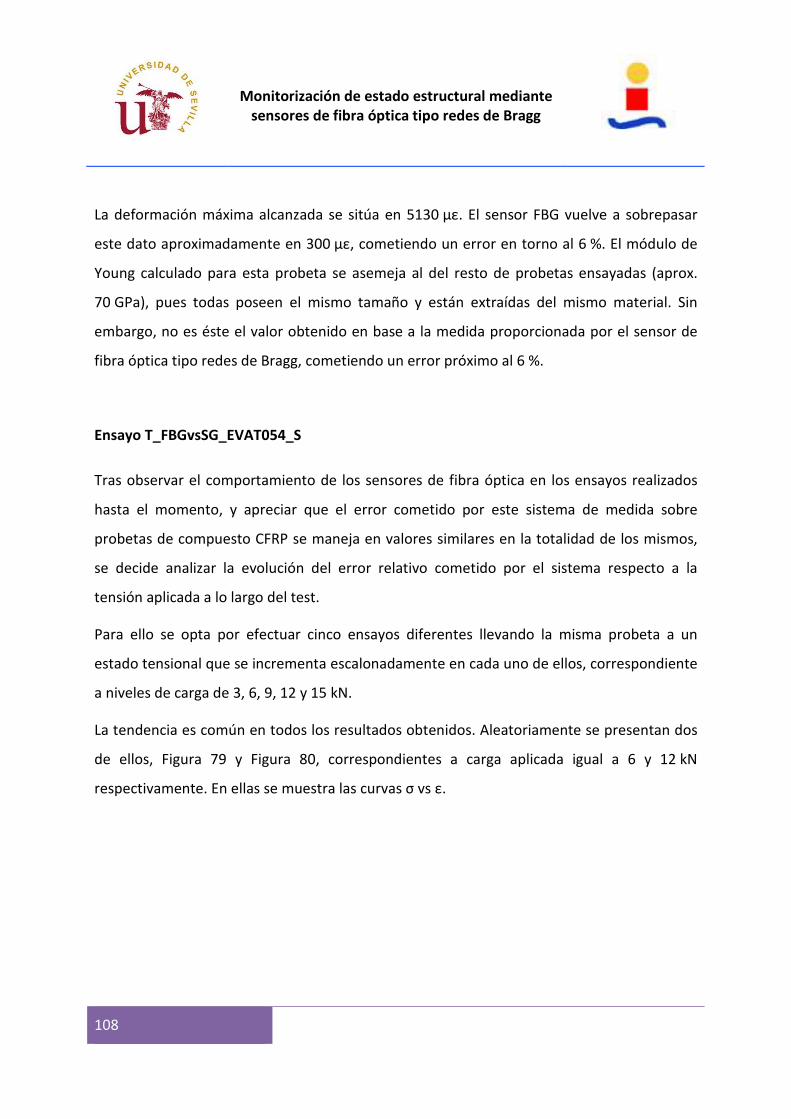
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
108
La deformación máxima alcanzada se sitúa en 5130 µε. El sensor FBG vuelve a sobrepasar
este dato aproximadamente en 300 µε, cometiendo un error en torno al 6 %. El módulo de
Young calculado para esta probeta se asemeja al del resto de probetas ensayadas (aprox.
70 GPa), pues todas poseen el mismo tamaño y están extraídas del mismo material. Sin
embargo, no es éste el valor obtenido en base a la medida proporcionada por el sensor de
fibra óptica tipo redes de Bragg, cometiendo un error próximo al 6 %.
Ensayo T_FBGvsSG_EVAT054_S
Tras observar el comportamiento de los sensores de fibra óptica en los ensayos realizados
hasta el momento, y apreciar que el error cometido por este sistema de medida sobre
probetas de compuesto CFRP se maneja en valores similares en la totalidad de los mismos,
se decide analizar la evolución del error relativo cometido por el sistema respecto a la
tensión aplicada a lo largo del test.
Para ello se opta por efectuar cinco ensayos diferentes llevando la misma probeta a un
estado tensional que se incrementa escalonadamente en cada uno de ellos, correspondiente
a niveles de carga de 3, 6, 9, 12 y 15 kN.
La tendencia es común en todos los resultados obtenidos. Aleatoriamente se presentan dos
de ellos, Figura 79 y Figura 80, correspondientes a carga aplicada igual a 6 y 12 kN
respectivamente. En ellas se muestra las curvas σ vs ε.
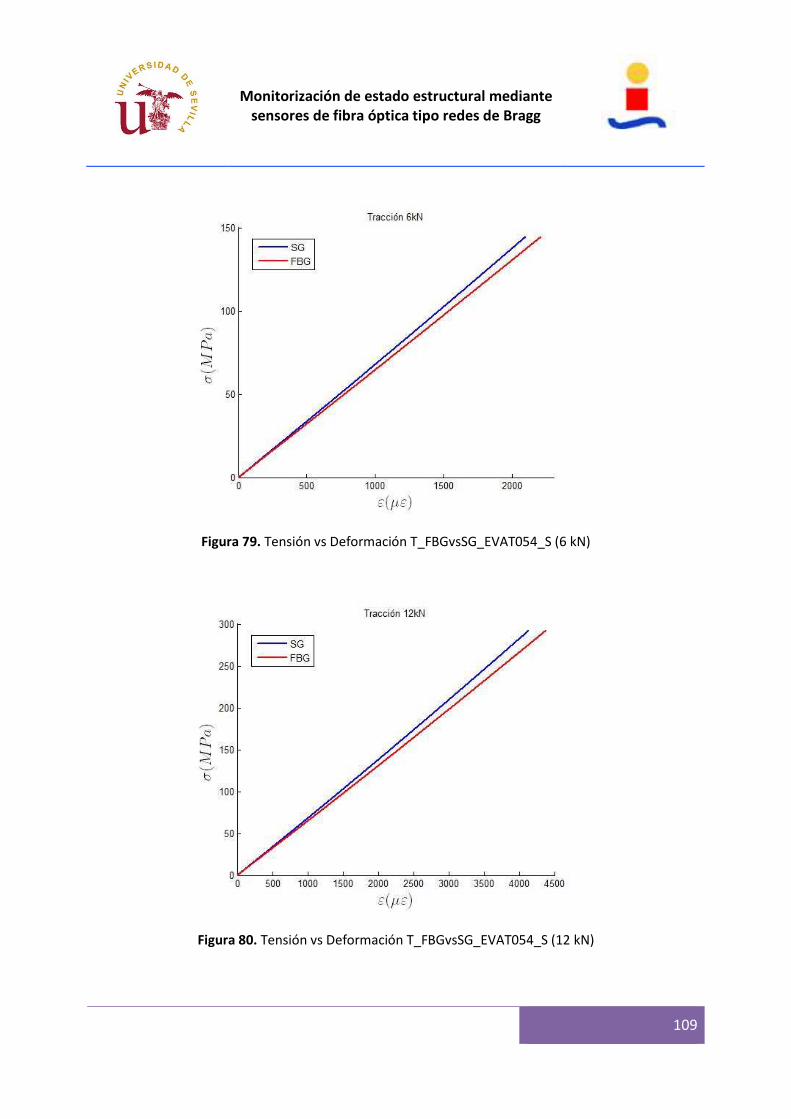
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
109
Figura 79. Tensión vs Deformación T_FBGvsSG_EVAT054_S (6 kN)
Figura 80. Tensión vs Deformación T_FBGvsSG_EVAT054_S (12 kN)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
110
Aparentemente no se observan diferencias entre ambas gráficas. Aunque analizando
detenidamente el valor obtenido para deformación máxima en cada ensayo, puede
establecerse una dependencia lineal entre el error relativo cometido por el sensor FBG y la
tensión aplicada. En la Figura 81 se observa claramente esta dependencia.
Figura 81. Error relativo vs Carga aplicada
Ya en el primero de los ensayos, correspondiente al estado tensional más bajo (70 MPa) y en
el que el nivel de deformación máxima alcanzado es similar al sometido a probetas de
aluminio, se da un error del 5,16 %. Este incrementa de forma lineal, alcanzando un valor
máximo de 6,14 % para el estado tensional más alto (360 MPa). Este hecho demuestra que
el comportamiento de la fibra óptica como sensor de deformaciones sobre fibra de carbono-
epoxi empeora conforme aumenta la deformación sufrida por el material. Además, deja
entrever que el error cometido por sensores FBG frente a galgas extensométricas no es
debido al nivel de deformación distinto alcanzado en los ensayos sobre uno u otro material
de estudio.
4.6
4.8
5
5.2
5.4
5.6
5.8
6
6.2
6.4
3kN 6kN 9kN 12kN 15kN
Erro
r re
lati
vo (
%)
Carga aplicada

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
111
6.2 ENSAYOS MECÁNICOS A FLEXIÓN
Ensayo F_FBGvsSG_SHMF001
Se realizan tres ensayos mecánicos sometiendo la probeta SHMF001 a esfuerzos de flexión.
La carga aplicada en cada uno de ellos es de 60, 100 y 140 N. Las deformaciones sufridas por
el espécimen se obtienen con dos dispositivos de medida diferentes (galgas extensométricas
y sensor FBG) con el objetivo de realizar un análisis comparativo entre ambos medios. Se
recuerda que el objetivo principal del presente proyecto es el de estudiar cómo se
comportan los sensores de fibra óptica tipo redes de Bragg como sensor de deformación.
La deformación medida con el sensor de fibra óptica es calculada a partir de la detección de
la variación en la longitud de onda reflejada producida, utilizando la expresión ya conocida y
anteriormente expuesta en el transcurso del proyecto.
En la Figura 82 se observa esta variación en función del tiempo de ensayo para las tres
pruebas realizadas.
Figura 82. Longitud de onda reflejada vs Tiempo F_FBGvsSG_SHMF001

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
112
Se aprecia que el ratio “incremento en la longitud de onda reflejada-incremento de tiempo”
es independiente de la carga final aplicada al ensayo (siempre y cuando su velocidad de
aplicación se mantenga constante e igual en todos los ensayos), observándose un
comportamiento claramente lineal. Tras alcanzar la carga máxima, la probeta es
automáticamente descargada por el controlador de la máquina Zwick.
En la Figura 83 se presenta la gráfica tensión vs deformación obtenida para uno de los
ensayos, concretamente en el que se aplicó una carga máxima igual a 100 N, equivalente a
una tensión de 33,42 MPa. La tensión a flexión producida en un test a tres puntos es
calculada a partir de la siguiente expresión, indicada en la norma ASTM D7264:
L � 3 ∗ ; ∗ <4 ∗ Z ∗ ℎ7 (�A. �&)
Donde:
σ = Máxima tensión de flexión (MPa)
P = Carga aplicada (N)
L = Distancia entre apoyos (mm)
b = Ancho de la probeta (mm)
h = Espesor de la probeta (mm)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
113
Figura 83. Tensión vs Deformación F_FBGvsSG_SHMF001 (100 N)
Como ya se ha mencionado, al finalizar cada ensayo el equipo realiza la descarga de la
probeta automáticamente. En el caso de los ensayos de flexión, la máquina Zwick lleva esta
descarga hasta valores negativos de fuerza.
En la Tabla 29 se muestra el valor alcanzado en deformaciones máximas así como el error
cometido por el sensor FBG en cada uno de los tres ensayos.
Resultados en deformaciones
Carga aplicada 60 N 100 N 140 N
Eq. de medida SG FBG SG FBG SG FBG
Def. máximas 631,04 µε 647,02 µε 1026,83 µε 1061,96 µε 1417,36 µε 1476,76 µε
Error relativo -- 2,53 % -- 3,42 % -- 4,19 %
Tabla 29. Resultados F_FBGvsSG_SHMF001

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
114
Al suponer pequeños desplazamientos, se considera a su vez que la galga extensométrica no
sufre una curvatura importante tal que pudiera afectar a su correcta medición. Se aprecia
que los resultados obtenidos no muestran la misma exactitud que los alcanzados cuando el
esfuerzo sometido es de tracción, en los que el error relativo cometido se encontraba en
torno al 1 % para el mismo material (Aluminio). El sensor FBG mide deformaciones
ligeramente superiores a la galga extensométrica llegando a un darse un error cercano al 5 %
para el caso de mayor carga aplicada. A su vez, también se observa que este error aumenta
conforme lo hace la fuerza aplicada en el ensayo.
Ensayo F_FBGvsSG_EVAT054
El objetivo de este ensayo es idéntico al anterior en su aplicación a material compuesto
CFRP. En esta ocasión el espécimen es sometido a cargas máximas de 40, 50 y 60 N dando
lugar a tres ensayos diferentes.
Se recuerda que la tensión correspondiente a esos estados de carga se calcula con la
expresión indicada en la norma ASTM D7264 sobre ensayos a flexión en materiales
compuestos de matriz polimérica, Eq. 14.
En la Figura 84 y en la Figura 85 se representan las curvas σ vs ε obtenidas para dos de ellos,
los correspondientes a cargas máximas aplicadas de 40 y 60 N, o equivalentemente 47,81 y
71,72 MPa.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
115
Figura 84. Tensión vs Deformación F_FBGvsSG_EVAT054 (40 N)
Figura 85. Tensión vs Deformación F_FBGvsSG_EVAT054 (60 N)

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
116
Observando las gráficas se comprueba rápidamente la fuerte dispersión en los resultados
obtenidos. En la Tabla 30 se presentan las deformaciones máximas obtenidas por sendos
dispositivos de medida, en la que el valor correspondiente a la galga extensométrica (SG) es
el valor medio entre las dos galgas fijadas a la superficie de la probeta. Igualmente se
muestra el error cometido en deformaciones máximas por la medida del sensor FBG,
habiendo tomado la señal de la galga como magnitud de referencia.
Resultados en deformaciones
Carga aplicada 40 N 50 N 60 N
Eq. de medida SG FBG SG FBG SG FBG
Def. máximas 837,83 µε 933,86 µε 1082,39 µε 1211,18 µε 1318,1 µε 1476,7 µε
Error relativo -- 11,46 % -- 11,9 % -- 12,03 %
Tabla 30. Resultados F_FBGvsSG_EVAT054
El error cometido por el sensor FBG alcanza grandes valores a pesar de no haber sometido la
probeta a un estado tensional excesivo, permaneciendo en niveles de deformación máxima
muy por debajo del límite de operatividad del sensor os1100 (5000 µε).
Al igual que sucedía en ensayos mecánicos a tracción, el comportamiento de los sensores de
fibra óptica han resultado peor cuando estos son adheridos a la superficie de materiales
compuestos CFRP en lugar de aluminio.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
117
6.3 EMBEBIDO DE SENSORES FBG DURANTE LA FABRICACIÓN DE UN PANEL DE
MATERIAL COMPUESTO
El resultado tras finalizar el ciclo de curado deja mucho margen a la mejora, Figura 86.
Figura 86. Panel de material compuesto. Resultado final
No se ha conseguido continuidad a lo largo y ancho de la superficie, presentando
ondulaciones en los puntos de apriete de los tornillos, zonas donde la resina ha fluido de
modo distinto al encontrarse con distinta presión. Además, la falta de rigidez de las placas
utilizadas ha provocado curvatura permanente en el conjunto, resultando un panel con
cierta concavidad.
Esta fuerte discontinuidad en el material hace que se opte por desestimar la caracterización
de las probetas que en un principio iban a ser extraídas del panel con el fin de comprobar si
embeber fibra óptica en estructuras de material compuesto puede ocasionar pérdida de
integridad estructural en el material huésped. En el caso de observar esta pérdida resulta
imposible establecer si es debido a la presencia de fibra óptica o simplemente es causa de la
falta de continuidad del panel obtenido.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
118
En cuanto a la salida de la fibra óptica por la superficie del material, no se ha producido la
rotura de ésta en ninguno de los casos en los que sale por el borde del laminado. Fue en la
extracción del panel de la bolsa de vacío cuando se produjo la rotura del sensor FBG no
produciéndose cerca del borde del laminado.
En cambio, para los dos casos en los que la fibra óptica sale por la cara del panel, ésta resultó
dañada durante el proceso de curado debido a que el vacío realizado mediante una bolsa
adecuada para ello oprime la salida de la fibra óptica provocando tensiones que no es capaz
de soportar.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
119
7. CONCLUSIONES Y DESARROLLOS FUTUROS
En este proyecto se ha podido empezar a demostrar que los sensores de fibra óptica tipo
redes de Bragg tienen un alto potencial para poder sustituir los sensores óhmicos tipo galga
extensométrica en la medición de deformaciones en estructuras aeroespaciales en servicio,
contribuyendo a la disminución de peso de equipamiento y ofreciendo la posibilidad de ser
embebidos dentro de estructuras de material compuesto. Esta conclusión está respaldada
por la revisión bibliográfica y por los resultados de los ensayos a tracción que se han
realizado comparando los sensores FBG con extensometría convencional y con el sistema de
video correlación Aramis.
Con respecto a este último, su principal ventaja es la posibilidad de actuar sin necesidad de
contacto con la pieza a inspeccionar, no modificando este y permitiendo su operatividad tras
el reconocimiento. Además, aunque no ha sucedido así en el presente proyecto, ofrece la
posibilidad de estudio sobre piezas 3D, ampliando en gran medida su rango de actuación. En
el transcurso de los ensayos, esta técnica ha presentado ciertas limitaciones dado el bajo
nivel de deformaciones alcanzadas. La principal ha sido la fuerte dispersión de los resultados
obtenidos en deformaciones. Este problema pudiera reducirse si en lugar de medir en
diferentes puntos de información distribuidos sobre la superficie, se calcula directamente la
deformación superficial de toda ella, técnica disponible en este sistema de video correlación.
No habiendo optado por esta opción, el ajuste por regresión del cómputo de datos extraídos
ha mostrado resultados aceptables.
Los ensayos de verificación del comportamiento de los sensores FBG en comparación con las
galgas extensométricas han mostrado aspectos con margen de mejora. Mientras que en su
uso adherido a una superficie de aluminio su comportamiento puede considerarse excelente
(error cometido menor del 1% en tracción), no puede decirse lo mismo cuando el material
huésped es material compuesto fibra de carbono-epoxi. En este caso, en los ensayos
mecánicos a tracción se da un error generalizado de un 5-6 %, viéndose superado este valor

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
120
en los ensayos a flexión en torno al 12% en CFRP (y 6% en Aluminio). Es probable que la
causa de este error radique en la aplicación del factor de conversión adecuado para
convertir las longitudes de onda medidas por el equipo lector de los sensores FBG en valores
de deformación.
Las ecuaciones mostradas como fundamento físico para los sensores de fibra óptica son
apropiadas en su aplicación sobre materiales isótropos y en un estado de carga uniaxial en el
que el sensor FBG es estirado. Este hecho explica la exactitud de los resultados para el caso
de ensayos a tracción sobre aluminio así como el error cometido sobre este mismo material
en los ensayos a flexión.
Las expresiones aplicables a un FBGS isótropo embebido o pegado sobre un material
compuesto con propiedades transversalmente isótropas fueron proporcionadas por Van
Steenkiste [STE 1996]. Dichas ecuaciones demuestran que el corrimiento de la longitud de
onda de la señal del sensor de Bragg depende no sólo de la longitud de onda inicial y de
propiedades ópticas y mecánicas del material del sensor sino también de las propiedades
mecánicas del laminado huésped y de su secuencia de apilamiento. Todas estas propiedades
necesitan conocerse para determinar el correcto factor de conversión que permite
transformar la variación de longitud de onda detectada en valores de deformación o
temperatura. Así pues, si se desea mayor exactitud en la aplicación de esta técnica sobre
material compuesto, se estima necesario el conocimiento absoluto de todas las propiedades
ópticas y mecánicas que entran en juego y el uso de las ecuaciones aplicables a este tipo de
materiales.
No ha sido posible realizar el estudio de pérdida de propiedades en el material huésped al
embeber sensores de fibra óptica pues el proceso seguido en la fabricación del panel de
material compuesto no ha sido eficiente. A falta de un autoclave para realizar el curado del
material, la cámara de altitud puede resultar suficiente siempre y cuando se aplique
uniforme y correctamente la presión necesaria en el proceso.

Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
121
La salida de la fibra óptica por el borde del panel parece no conllevar mayores problemas
aunque resulta conveniente utilizar protecciones adecuadas para que no se produzca la
rotura del sensor en los bordes del laminado. Imprescindible resulta el uso de estas
protecciones cuando la salida del sensor FBG se efectúa por la cara del laminado pues el
vacío realizado crea tensiones en la salida de la fibra que ésta no es capaz de soportar
rompiéndose en la mayoría de los casos estudiados.
La influencia sobre la integridad estructural del material huésped junto con el estudio de los
métodos de conexión y terminación de sensores FBG en material compuesto representan las
dos líneas de investigación y desarrollo inmediatas en el futuro transcurrir del proyecto.
Así mismo se prevé la monitorización del curado de material compuesto a partir de prepregs
mediante sensores de Bragg. De este modo se pretende analizar la variación de temperatura
alcanzada durante el ciclo de curado en el interior de la resina e incluso controlar el flujo de
transferencia de ésta en procesos RTM. Con ello se pretende optimizar el ciclo de curado en
la fabricación de materiales compuestos.
Por último, es interesante simular el comportamiento de sensores FBG frente a condiciones
de servicio de estructuras aeroespaciales durante toda su vida operativa. Este es un tema de
vital importancia porque la propia naturaleza de esta tecnología (sensores integrados en
estructuras) impide la reparación de estos en caso de daño. Por ello, resulta necesario
emprender una campaña de ensayos de fatiga y ciclos térmicos para comprobar la
durabilidad y el funcionamiento correcto durante toda su vida operacional.
Todas las labores citadas son estrictamente necesarias antes de poder pensar en la
certificación de los sensores de fibra óptica tipo redes de Bragg como sensores de
deformación y temperatura en estructuras aeroespaciales.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
122
8. REFERENCIA BIBLIOGRÁFICA
[ARM 1998] Armitage S. R, Holford D. M: Future fatigue monitoring systems, RTO Meeting
Proceedings 7 (RTO-MP-7), ref 4, 1998.
[CAU 2007] C. Caucheteur, M. Debliquy, D. Lahem, P. Mégret: Quasi-distributed fiber Bragg
grating sensors for hydrogen leak detection in air, in Proc. Proceedings Symposium
IEEE/LEOS Benelux Chapter, Bruselas, 2007
[CHA] Chan-Sun Hong, Chi-Young Ryu, Chun-Gon Kim: Strain measurement of composite
laminates using fiber Bragg grating sensors, Department of Aerospace Engineering, Korea
Advanced Institute of Sciense and Technology (KAIST), Korea.
[HIR 2006] Hiroshi Tsuda, Jung-Ryul Lee: Strain and damage monitoring of CFRP in impact
loading using a fiber Bragg grating sensor system, Composites Sciense and Technology 77
(2007) 1353-1361
[MAL 2006] Malte Frovel: Sensores de fibra óptica tipo redes de Bragg embebidos en
material compuesto para medir deformaciones y temperaturas criogénicas, Tesis doctoral de
la Escuela Técnica Superior de Ingenieros Aeronáuticos, Universidad Politécnica de Madrid,
2006.
[MAN 2008] Manfred Kreuzer: New horizons…for your measurements, Sensors
Peterborough NH, Volume 7004 (2008), Issue 10, Pages 70040B-70040B-4.
[MEN 1999] Menéndez J. M.: Redes de difracción de Bragg como sensores de deformación,
Tesis doctoral de la Escuela Técnica Superior de Ingenieros Aeronáuticos, Universidad
Politécnica de Madrid, 1999.
[OKA 2004] Yoji Okabe, Ryohei Tsuji, Nobuo Takeda: Application of chirped fiber Bragg
grating sensors fofr identification of crack location in composites, Composites: Part A 35
(2004) 59-65.
Monitorización de estado estructural mediante sensores de fibra óptica tipo redes de Bragg
123
[SAT 2002] K. Satori, Y. Ikeda, Y. Kurosawa, A. Hongo, N. Takeda: Development of small-
diameter optical fiber sensors for damage detection in composite laminates, Sensory
phenomena and measurement instrumentation for smart structures and materials, SPIE
2002, 4328, 285-95.
[STE 1996] Regis J. Van Steenkiste, George S. Springer: Strain and Temperature
Measurement with Fiber Optic Sensors, CRS Press, Lancaster, Peensylvania, USA, 1st Ed.
(1996)
[TAK 2002] S. Takeda, Y. Okabe, N. Takeda: Delamination detection in CFRP laminates with
embedded small-diameter fiber Bragg grating sensors, Composites: Part A 33 (2002) 971-980
[WEN 2011] Wenbin Hu, Hanli Cai, MInghong Yang, Xinglin Tong, Ciming Zou, Wei Chen: Fe-
C-coated fiber Bragg grating sensor for steel corrosion monitoring, Corrosion Sciense 53
(2011) 1933-1938.
[www01] www.micronoptics.com/sensing_instruments/php
[www02] www.fbgs.com/productsadv/be-en/7/detail/item/17/page/1/
[www03] www.hbm.com/es/menu/productos/electronica-de-medida/sistemas-de-
adquisicion-de-datos-especialmente-dedicados/interrogadores-optoelectronicos/si-di