Proyecto Fin de Carrera Ingeniería...
108
- Proyecto Fin de Carrera Ingeniería Industrial Implementación de un modelo de interfase en el programa de elementos finitos ABAQUS. Aplicación a materiales compuestos Autor: David Castillo González Tutores: Luis Távara Mendoza, Vladislav Manti č Leščišin Dep. Mecácnica de Medios Continuos y Teoría de Estructuras Grupo de Elasticidad y Resistencia de Materiales Escuela Técnica Superior de Ingeniería Universidad de Sevilla Sevilla, 2014
Transcript of Proyecto Fin de Carrera Ingeniería...
-
Proyecto Fin de Carrera Ingeniería Industrial
Implementación de un modelo de interfase en el programa de elementos finitos ABAQUS. Aplicación a materiales compuestos
Autor: David Castillo González
Tutores: Luis Távara Mendoza, Vladislav Mantič Leščišin
Dep. Mecácnica de Medios Continuos y Teoría de EstructurasGrupo de Elasticidad y Resistencia de Materiales
Escuela Técnica Superior de Ingeniería Universidad de Sevilla
Sevilla, 2014

Proyecto Fin de Carrera Ingeniería Industrial
Implementación de un modelo de interfase en el
programa de elementos finitos ABAQUS. Aplicación a materiales compuestos
Autor:
David Castillo González
Tutores:
Luis Távara Mendoza
Vladislav Mantič Leščišin
Dep. Mecánica de Medios Continuos y Teoría de Estructuras
Grupo de Elasticidad y Resistencia de Materiales
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2014

Proyecto Fin de Carrera: Implementación de un modelo de interfase en el programa de elementos finitos ABAQUS. Aplicación a materiales compuestos
Autor: David Castillo González
Tutores: Luis Távara Mendoza
Vladislav Mantič Leščišin
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, 2014
El Secretario del Tribunal


A mi familia

Agradecimientos
Quería dedicar estos párrafos para agradecer a todas las personas que me han apoyado durante la elaboración de este proyecto.
En primer lugar a mis tutores Luis Távara y Vladislav Mantič por darme la oportunidad de realizar este proyecto y por su paciencia y dedicación durante todo este tiempo. Agradecer también a todo el Grupo de Elasticidad y Resistencia de Materiales por su amabilidad y en particular a Alejandro Estefani por su valiosa ayuda.
A mi familia agradecerle todo el apoyo que me han mostrado siempre. A mis padres agradecerle hacerme la persona que soy hoy. Y a Gema darle las gracias por hacerme sonreír cada vez que lo necesitaba.
Resumen
El objetivo de este proyecto es la implementación de un modelo de interfase fibra-matriz en el programa de elementos finitos ABAQUS, a través de la subrutina de usuario UMAT. El modelo de interfase implementado es el LEBIM (Linear Elastic Brittle Interface Model) desarrollado por el Grupo de Elasticidad y Resistencia de Materiales de la Universidad de Sevilla.
La implementación de este modelo ya se realizó utilizando el método de los elementos de contorno (BEM). Por lo que se ha realizado, en primer lugar, varios modelos ya resuelto en BEM para comparar resultados. Estos modelos han sido: el modelo de una DCB (Double Cantilever Beam), un modelo de una fibra inmersa en una matriz infinita y un modelo de 10 fibras inmersa en otra matriz infinita.
Además se ha llevado a cabo otros modelos para hacer un estudio de cómo se comportan diferentes métodos numéricos de resolución implementados en ABAQUS ante la inestabilidad que muestran estos modelos. Los modelos que muestran las inestabilidades que se han estudiado son los modelos de despegue de la interfase fibra-matriz. En este proyecto los modelos de interfase fibra-matriz elegidos son:
1 fibra inmersa en una matriz infinita
1 fibra inmersa en una matriz finita
10 fibras inmersa en una matriz infinita
10 fibras inmersa en una matriz finita
100 fibras inmersa en una matriz infinita
100 fibras inmersa en una matriz finita
Los problemas de 100 fibras se han elegido también porque estos no pueden ser resueltos en BEM por el gran coste de tiempo computacional que conllevaría y de esta forma ver las posibilidades que ofrece su implementación en elementos finitos.
Los resultados obtenidos muestran que la implementación del LEBIM a través de la UMAT nos permite disponer de una herramienta numérica que permite calcular la carga de fallo en problemas con grietas de interfase.
Índice
Agradecimientos viii
Resumen ix
Índice x
Índice de Tablas xiii
Índice de Figuras xv
Notación xix
1 Introducción 1 1.1 Materiales Compuestos 1 1.2 Daño en Materiales Compuestos 4 1.3 Modelos de Mecánica de la Fractura no singular: Modelo de Zona Cohesiva y Modelo de Interfase
Elástica Lineal Fragil (LEBIM) 4 1.3.1 Modelo de Zona Cohesiva 4 1.3.2 Modelos de interfase elástica lineal frágil (LEBIM) 5
1.4 Objetivos y Organización 6
2 Modelo de interfase lineal elástico frágil (LEBIM) 7 2.1 Comportamiento de la interfase 7 2.2 Criterio de fallo de la interfase 10
3 Subrutina UMAT de ABAQUS 15 3.1 Variables 15 3.2 Funcionamiento 16 3.3 Formato de la subrutina 18 3.4 Implementación del LEBIM en la subrutina UMAT. 19
4 Métodos numéricos utilizados 23 4.1 Newton‐Raphson 23 4.1.1 Adición de un factor de viscosidad ficticio al modelo 24
4.2 Arc‐length 25 4.2.1 Método de Riks modificado 25 4.2.2 Comparación con el método de Ramm 28
5 Modelo del ensayo de tenacidad interlaminar en materiales compuestos 29 5.1 Descripción de la probeta del ensayo 29 5.2 Modelo numerico 30 5.3 Estudio de la sensibilidad de la malla. 31 5.4 Pruebas de verificación funcionamiento de UMAT al utilizar sistema de coordenadas locales. 32 5.5 Resultados numéricos en FEM y comparación con resultados experimentales y resultados
numéricos en BEM. 33 5.6 Comparación de los resultados experimentales con los de FEM utilizando diferentes tamaños de
malla 37 5.7 Estudio de la sensibilidad al número de incrementos 40 5.8 Modelo DCB no‐simétrico 41
6 Modelo unifibra 43 6.1 Modelo matriz infinita 43 6.1.1 Propiedades mecánicas 44 6.1.2 Modelo en FEM 45 6.1.3 Estudio de la sensibilidad de la malla. 46 6.1.4 Resultados 47
6.2 Matriz finita 53 6.2.1 Modelo 53 6.2.2 Modelo FEM 53 6.2.3 Resultados 54
7 Modelo multifibra: 10 fibras 59 7.1 Modelo matriz infinita 59 7.1.1 Resultados 61
7.2 Modelo matriz finita 63 7.2.1 Resultados con cargas en tensiones. 64 7.2.2 Resultados con cargas en desplazamientos. 67
8 Modelo multifibra: 100 fibras 70 8.1 Modelo matriz infinita 70 8.1.1 Resultados 72
8.2 Modelo matriz finita 73 8.2.1 Resultados cargas en tensiones 73 8.2.2 Resultados cargas en desplazamientos 76
9 Conclusiones y trabajo futuro 79
A. Anexo: Subrutina UMAT programada 81
Referencias 86

ÍNDICE DE TABLAS
Tabla 1-1 Propiedades de las fibras de Carbono, Vidrio y Kevlar 49 a 20ºC. Información obtenida de [30] 2
Tabla 1-2 Propiedades típicas de las resinas epoxi y poliéster usadas en los materiales compuestos. Información obtenida de [30] 3
Tabla 1-3 Comparación de propiedades de materiales convencionales y laminados “cross-ply” de materiales compuestos. 4
Tabla 2-1 Nomenclatura de las propiedades de la interfase. 7
Tabla 5-1 Propiedades del laminado utilizadoen la probeta 30
Tabla 5-2 Propiedades del adhseivo EA 9695 K.05 necesarias para definir el material con el modelo LEBIM 31
Tabla 5-3 Cargas que producen la rotura de la unión adhesiva para diferentes tamaño de malla. 31
Tabla 6-1 Propiedades mecánicas de la fibra y de la matriz utilizadas en el modelo 44
Tabla 6-2 Propiedades utilizadas para modelar la interfase 44
Tabla 6-3 Tensión que provaca el despegue de la interfase para los diferentes tamaños de mallas utilizados 46
Tabla 7-1 Representaciones de las deformadas de las soluciones obtenidas en Figura 7-7 en diferentes puntos de las curvas. 66
Tabla 7-2 Representaciones de las deformadas de las soluciones obtenidas en Figura 7-8 en diferentes puntos de las curvas. 69
Tabla 9-1 Tabla comparativa de las tensiones críticas obtenidas en cada modelo de interfase fibra matriz realizado. 80

ÍNDICE DE FIGURAS
Figura 1-1 Clasificación de los materiales compuestos 2
Figura 1-2 Evolución de las tensiones normales según el Modelo de la zona cohesiva para el modo I 5
Figura 1-3 Gráficas tensión crítica deformación crítica en modo I para diferentes modelos cohesivo: (a) Lineal (b) Bilineal (c) Xu and Needleman 5
Figura 2-1 Porción de un material con el comportamiento LEBIM ante unas tensiones normales (a) y ante unas tensiones tangenciales (b). 8
Figura 2-2 Relación entre kt/kn y νl. 9
Figura 2-3 Comportamiento (a) normal y (b) tangencial cuando la interfase no se encuentra dañada en el modelo LEBIM. Comportamiento (c) normal y (d) tangencial del modelo cuando la interfase se encuetra dañada. 11
Figura 2-4 Evolución del indide de liberación de energía crítico, Gc, en función de ψG y de diferentes valores de λ 12
Figura 2-5 Zonas de fallo en el plano (σ, τ) para diferentes valores de λ con una relación de rigideces kn/kt = 3. 13
Figura 3-1 Esquema del funcionamiento de ABAQUS/Standard al utilizar la subrutina UMAT. 17
Figura 3-2 Esquema del intercambio de valores que se produce al usar la subrutina UMAT 18
Figura 3-3 Diagrama de flujo de la implementación del modelo LEBIM usando la subrutina UMAT 20
Figura 4-1 Esquema funcionamiento del algoritmo de Newton-Raphson 24
Figura 4-2 Esquema del método de Riks modificado. 26
Figura 4-3 Esquema del algoritmo de arc-length de Ramm [32] 28
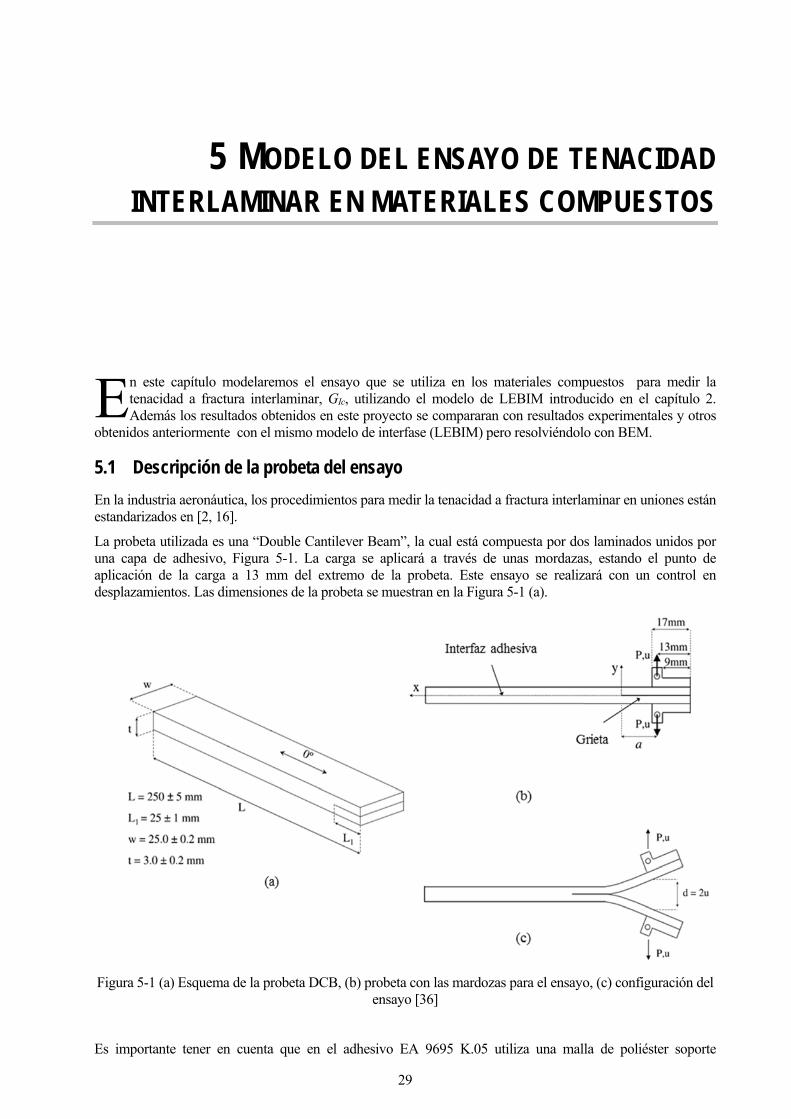
Figura 5-1 (a) Esquema de la probeta DCB, (b) probeta con las mardozas para el ensayo, (c) configuración del ensayo [36] 29
Figura 5-2 Imagén extraida de [thesis] donde se puede observa el detalle de la malla de soporte de poliéster del adhesivo EA 9695 K.05, incluye las dimensiones de los rombos que forman la malla, tanto las dimensiones interiores como la exteriores. La imagen ha sido tomada con un aumento de 50x. 30
Figura 5-3 Esquema de los modelos resueltos para testear la subrutina UMAT 32
Figura 5-4 Curvas fuerzas-desplazamiento entre mordazas para los diferentes modelos girados. 33
Figura 5-5 Modelo en ABAQUS para la situación (a) indeformada y (b) la deformación del mismo cuando se aplicada un desplazamiento de 10 mm y (c) de 50 mm entre mordazas. El tamaño de elemento utilizado en este modelo es de 0.5 mm. 34
Figura 5-6 Distribución de las tensiones σyy en los nodos de los elementos a lo largo de la unión adhesiva. 34
Figura 5-7 Distribución de las tensiones σyy en los puntos de integración de los elementos a lo largo de la unión adhesiva. 35
Figura 5-8 Distribución de las tensiones σyy en los nodos de los elementos a lo largo de la unión adhesiva para el caso de tensión plana. En ella se pueden ver como pueden mostrarse tensiones negativas. 35
Figura 5-9 Comparación entre la curva experimental, la obtenida a través del método de los elementos de contornos (BEM) [] y por el método de los elementos finitos (FEM). 36
Figura 5-10 Comparación entre la curva experimental, la obtenida en BEM con saltos [36, 39] y la obtenida en FEM con una malla de un tamaño de elemento de 5 mm. También se incluye un detalle del adhesivo y la malla soporte. 37
Figura 5-11 Comparación de las curvas fuerza-desplazamiento experimentales con las obtenidas en el modelo de ABAQUS con malla de 0.25 mm (a) y 0.5 mm (b) 38
Figura 5-12 Comparación de las curvas fuerza-desplazamiento experimentales con las obtenidas en el modelo de ABAQUS con malla de 1 mm (a) y 2 mm (b) 39
Figura 5-13 Comparación de los resultados experimentales con los obtenidos en FEM con un tamaño de malla de 1.395 mm. 40
Figura 5-14 Comparación de las curvas fueraza aplicda en función de lel desplazamiento entre mordazas para diferentes números de incrementos dados para un mismo desplazamiento máximo. 41
Figura 5-15 Curvas fuerza desplazamiento del modelo DCB en caso de ser simétrico o no simétrico, y de haber sido resuelto utilizando FEM y BEM 42
Figura 6-1 Problema de una sola fibra inmersa en una matriz infinita bajo una carga remota (a) sin despegue de la interfase y (b) con despegue. 44
Figura 6-2 División realizada en al interfase para obtener sólo el despegue de la interfase fibra-matrix en el punto A 45
Figura 6-3 Esquema del modelo de la matriz realizado en el modelo de matriz infinita. 46
Figura 6-4 Malla utilizada en el (a) modelo y (b) detalle de la malla cercana a la fibra. 47
Figura 6-5: (a) tensión remota en función de la apertura de la interfase en el punto A, (b) tensión remota en función de la deformación media (εPQ) y en función de la deformación de los puntos extremos de la interfase (εAB) obtenida utilizando BEM [23, 40]. 48
Figura 6-6 Detalle de la inestabilidad que se presenta en la curva de la tensión aplicada en función de la deformación media, y comparación entre controlar el problema en tensiones o en desplazamientos. 50
Figura 6-7 Tensión remota en función de la apertura de la interfase en el punto A. 51
Figura 6-8 Evolución de las tensiones radiales y tangenciales nodales de la interfase cuando se aplica una carga de 63 MPa utilizando el método de Newton-Raphson 51
Figura 6-9 Evolución de las tensiones radiales y tangenciales nodales de la interfase cuando se aplica una carga de 63 MPa utilizando un factor de amortiguamiento ficticio 52
Figura 6-10 Evolución de las tensiones radiales y tangenciales nodales de la interfase mientras se produce la inestabilidad utilizando un factor de amortiguamiento ficticio. 52
Figura 6-11 Esquema del modelo de la matriz realizado en el modelo de matriz finita. 53
Figura 6-12 Malla utilizada en el modelo unifibra embuida en matriz pequeña 54
Figura 6-13 Tensión aplicada en la dirección y en función de la deformación media (a) y (b) de la apertura de la interfase 55
Figura 6-14 Tensión media aplicada en la dirección Y en función de (a) la deformación media y (b) de la apertura de la interfase. 57
Figura 7-1 Posición del cojunto de las 10 fibras [31]. 60
Figura 7-2 Esquema del modelo del conjunto de las 10 fibras embebidas en una matriz infinita. 60
Figura 7-3 Malla utilizada en el modelo de 10 fibras embebidas en una matriz infinita (a), detalle de la malla cercana a las 10 fibras. 61
Figura 7-4 Camino de la grieta obtenido al resolver en problema con (a) BEM, (b) con un coeficiente de amortiguamiento ficticio y (c) con el algoritmo de Newton-Raphson. 62
Figura 7-5 Esquema del modelo de 10 fibras en matriz finita. 63
Figura 7-6 Malla utilizada en el modelo multifibra de 10 fibras con matriz finita. 63
Figura 7-7 Gráfica tensión aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 10 fibras en matriz pequeña con cargas en tensiones. 65
Figura 7-8 Gráfica tensión media aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 10 fibras en matriz pequeña con cargas en desplazamientos. 68
Figura 8-1 Fotografía donde se han tomado la distribución de las 100 fibras, resaltando las fibras tomadas para el modelo realizado. 71
Figura 8-2 Esquema del modelo del conjunto de las 100 fibras inmersas en una matriz infinita 71
Figura 8-3 Malla del modelo de 100 fibras imversa en una matriz infinita. El detalle de la malla en las 100 fibras no se ha dado por su mala visibilidad. 72
Figura 8-4 Camino de la grieta obtenido al resolver el modelo de 100 fibras inmersas en una matriz infinita con (a) Newton-Raphson y (b) con un coeficiente de amortiguamiento ficticio. 72
Figura 8-5 Esquema del modelo de 100 fibras en matriz finita realizado. 73
Figura 8-6 Detalle sobre la malla utilizada en el modelo de 100 fibras en matriz finita. 74
Figura 8-7 Gráfica tensión aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 100 fibras en matriz pequeña con cargas en tensiones. 74
Figura 8-8 (a) camino que seguiría la grieta en la matriz obtenido por el método Newton-Rahpson (b) deformada final obtenida con un amortiguamiento ficticio (c) camno que seguiría la grieta en la matriz obtenido con el método de Riks. Las deformadas se han multiplicado por un factor de escala de 3. 75
Figura 8-9 Gráfica tensión media aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 100 fibras en matriz pequeña con cargas en desplazamientos. 76
Figura 8-10 (a) camino que seguiría la grieta en la matriz obtenido por el método Newton-Rahpson (b) deformada final obtenida con un amortiguamiento ficticio (c) deformada final obtenida por el método de Riks. Las deformadas se han multiplicado por un factor de escala de 3. 77

Notación
CZM Modelo de Zona Cohesiva (Cohesive Zone Model)
FEM Método de los Elementos Finitos (Finite Element Method)
LEBIM Modelo de Interfase Elástica Lineal Frágil (Lineal Elastic Brittle Interfase Model)
BEMDCBERR
Método de los Elementos de Contorno (Boundary Element Method)
Viga doble en voladizo (Double cantilever beam)
Índice de liberación de energía (Energy Release Rate)
1
1 INTRODUCCIÓN
l uso extensivo de los materiales compuestos en diversos tipos de estructuras hace necesario un entendimiento más profundo sobre los diferentes comportamientos ante el fallo que presentan este tipo de materiales. Este proyecto se centrará en el estudio del fallo de la interfase fibra-matriz, y en la
implementación de un modelo de interfase en el código de elementos finitos ABAQUS que permita el estudio del inicio y la propagación de las roturas en las interfases.
En los últimos años ha habido multitud de autores que han implementado Modelos Cohesivos (CZM) en códigos de Métodos de los Elementos Finitos (FEM) para resolver problemas de fractura. Las ventajas de los CZM respecto a la mecánica de la fractura elástica lineal clásica, es que no existen singularidades de tensiones en el entorno del vértice de la grieta. Utilizando CZM se puede estudiar tanto la iniciación como el crecimiento de la grieta.
En los últimos años, el Grupo de Elasticidad y Resistencia de Materiales de la Universidad de Sevilla ha desarrollado un nuevo modelo de interfase llamado Modelo de Interfase Elástica Lineal Frágil (LEBIM). Si bien existía un modelo muy parecido a este para modelar pequeñas capas de adhesivo en las uniones [9], el primer documento donde se implementa este comportamiento par modelar la unión fibra-matriz es en [36], en el que se implementa este comportamiento en el método de los elementos de contorno (BEM).
Como se verá más adelante los modelos de iniciación de grieta en la interfase presentan inestabilidades que hace que la solución sea difícilmente obtenible por los métodos tradicionales de resolución. L. Tavára y colaboradores [36] han desarrollado un método de resolución en BEM capaz de obtener la solución aún produciéndose la inestabilidad, este método es llamado “Linear Sequential Analysis”.
En este proyecto se implementa el modelo LEBIM en el código de elementos finitos ABAQUS a través de la subrutina UMAT, la cual permite definir el comportamiento del material. La justificación de implementar el LEBIM en un código comercial de FEM, es que geometrías complejas se pueden modelar más fácilmente que en BEM. Además los métodos de resolución implementados en ABAQUS son diferentes al Lineal Sequential, Analysis, por lo cual podremos hacer una comparativa de las soluciones obtenidas por los diferentes métodos.
La organización de este capítulo será la siguiente, en la sección 1.1 se hará una introducción breve a los materiales compuestos. En la sección 1.2 se detallará los diferentes niveles de daño que ocurren en los materiales compuestos. La introducción a modelos de fractura no-singular se realizará en la sección 1.3. Por último los objetivos del proyecto y la organización del mismo se detallarán en la sección 1.4.
1.1 Materiales Compuestos
Se entiende como material compuesto a la combinación a escala macroscópica de dos o más materiales con interfases de separación entre ellos. Con ello se pretende conseguir unas propiedades diferentes a las que presentan cada material individualmente. Desde el punto de vista de la ingeniería el uso de estos materiales se debe a que se puede obtener propiedades mejores que las sumas de cada material por separado.
Los materiales compuestos que se suelen utilizar en la industria están compuestos por un material base, al que se le suele denominar matriz, y un material de refuerzo. Para entender mejor los diferentes materiales compuestos que existen se realizará una clasificación de los mismos. La creación de los materiales compuestos es para mejorar algunas de sus propiedades como rigidez, comportamiento a alta temperatura,
E
Introducción
2
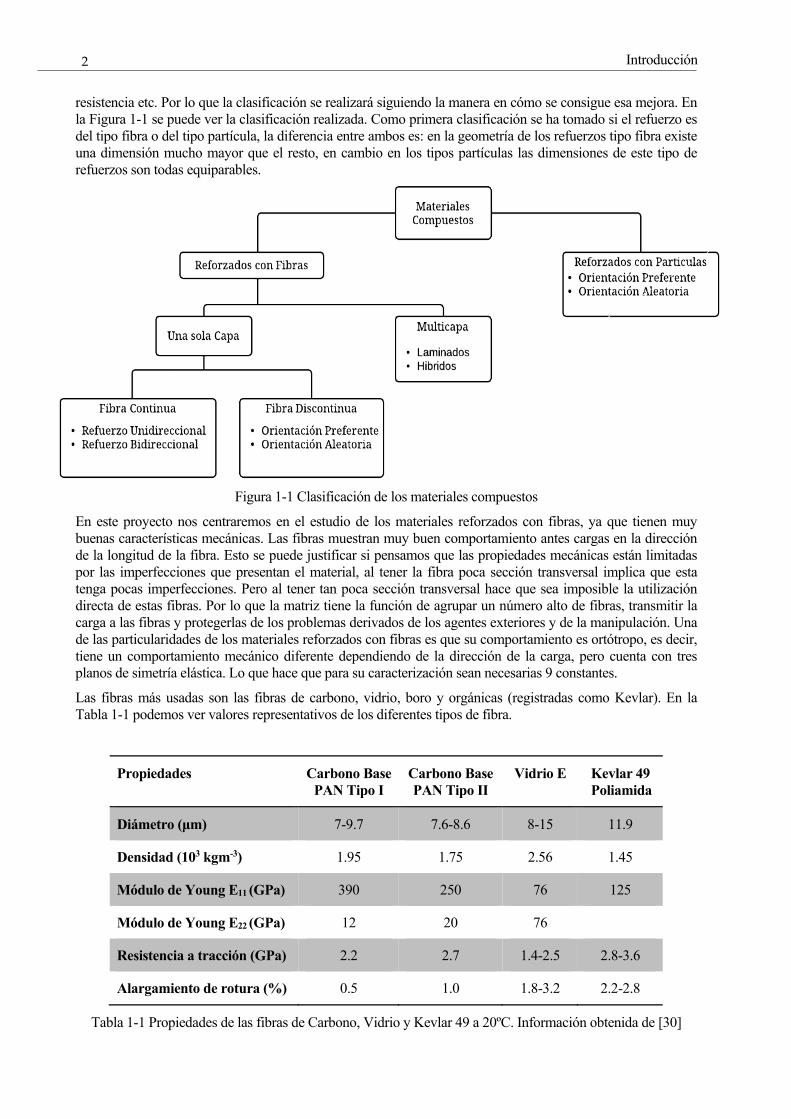
resistencia etc. Por lo que la clasificación se realizará siguiendo la manera en cómo se consigue esa mejora. En la Figura 1-1 se puede ver la clasificación realizada. Como primera clasificación se ha tomado si el refuerzo es del tipo fibra o del tipo partícula, la diferencia entre ambos es: en la geometría de los refuerzos tipo fibra existe una dimensión mucho mayor que el resto, en cambio en los tipos partículas las dimensiones de este tipo de refuerzos son todas equiparables.
Figura 1-1 Clasificación de los materiales compuestos
En este proyecto nos centraremos en el estudio de los materiales reforzados con fibras, ya que tienen muy buenas características mecánicas. Las fibras muestran muy buen comportamiento antes cargas en la dirección de la longitud de la fibra. Esto se puede justificar si pensamos que las propiedades mecánicas están limitadas por las imperfecciones que presentan el material, al tener la fibra poca sección transversal implica que esta tenga pocas imperfecciones. Pero al tener tan poca sección transversal hace que sea imposible la utilización directa de estas fibras. Por lo que la matriz tiene la función de agrupar un número alto de fibras, transmitir la carga a las fibras y protegerlas de los problemas derivados de los agentes exteriores y de la manipulación. Una de las particularidades de los materiales reforzados con fibras es que su comportamiento es ortótropo, es decir, tiene un comportamiento mecánico diferente dependiendo de la dirección de la carga, pero cuenta con tres planos de simetría elástica. Lo que hace que para su caracterización sean necesarias 9 constantes.
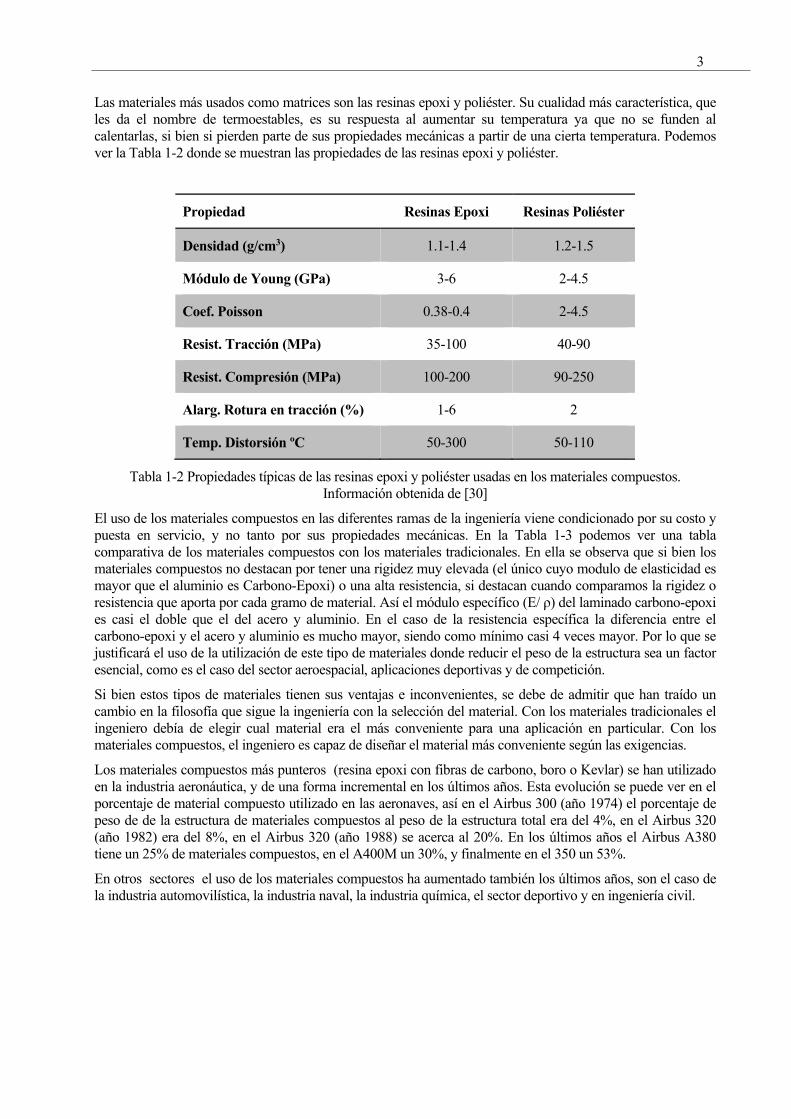
Las fibras más usadas son las fibras de carbono, vidrio, boro y orgánicas (registradas como Kevlar). En la Tabla 1-1 podemos ver valores representativos de los diferentes tipos de fibra.
Propiedades Carbono Base PAN Tipo I
Carbono Base PAN Tipo II
Vidrio E Kevlar 49 Poliamida
Diámetro (μm) 7-9.7 7.6-8.6 8-15 11.9
Densidad (103 kgm-3) 1.95 1.75 2.56 1.45
Módulo de Young E11 (GPa) 390 250 76 125
Módulo de Young E22 (GPa) 12 20 76
Resistencia a tracción (GPa) 2.2 2.7 1.4-2.5 2.8-3.6
Alargamiento de rotura (%) 0.5 1.0 1.8-3.2 2.2-2.8
Tabla 1-1 Propiedades de las fibras de Carbono, Vidrio y Kevlar 49 a 20ºC. Información obtenida de [30]
3
Las materiales más usados como matrices son las resinas epoxi y poliéster. Su cualidad más característica, que les da el nombre de termoestables, es su respuesta al aumentar su temperatura ya que no se funden al calentarlas, si bien si pierden parte de sus propiedades mecánicas a partir de una cierta temperatura. Podemos ver la Tabla 1-2 donde se muestran las propiedades de las resinas epoxi y poliéster.
Propiedad Resinas Epoxi Resinas Poliéster
Densidad (g/cm3) 1.1-1.4 1.2-1.5
Módulo de Young (GPa) 3-6 2-4.5
Coef. Poisson 0.38-0.4 2-4.5
Resist. Tracción (MPa) 35-100 40-90
Resist. Compresión (MPa) 100-200 90-250
Alarg. Rotura en tracción (%) 1-6 2
Temp. Distorsión ºC 50-300 50-110
Tabla 1-2 Propiedades típicas de las resinas epoxi y poliéster usadas en los materiales compuestos. Información obtenida de [30]
El uso de los materiales compuestos en las diferentes ramas de la ingeniería viene condicionado por su costo y puesta en servicio, y no tanto por sus propiedades mecánicas. En la Tabla 1-3 podemos ver una tabla comparativa de los materiales compuestos con los materiales tradicionales. En ella se observa que si bien los materiales compuestos no destacan por tener una rigidez muy elevada (el único cuyo modulo de elasticidad es mayor que el aluminio es Carbono-Epoxi) o una alta resistencia, si destacan cuando comparamos la rigidez o resistencia que aporta por cada gramo de material. Así el módulo específico (E/ ρ) del laminado carbono-epoxi es casi el doble que el del acero y aluminio. En el caso de la resistencia específica la diferencia entre el carbono-epoxi y el acero y aluminio es mucho mayor, siendo como mínimo casi 4 veces mayor. Por lo que se justificará el uso de la utilización de este tipo de materiales donde reducir el peso de la estructura sea un factor esencial, como es el caso del sector aeroespacial, aplicaciones deportivas y de competición.
Si bien estos tipos de materiales tienen sus ventajas e inconvenientes, se debe de admitir que han traído un cambio en la filosofía que sigue la ingeniería con la selección del material. Con los materiales tradicionales el ingeniero debía de elegir cual material era el más conveniente para una aplicación en particular. Con los materiales compuestos, el ingeniero es capaz de diseñar el material más conveniente según las exigencias.
Los materiales compuestos más punteros (resina epoxi con fibras de carbono, boro o Kevlar) se han utilizado en la industria aeronáutica, y de una forma incremental en los últimos años. Esta evolución se puede ver en el porcentaje de material compuesto utilizado en las aeronaves, así en el Airbus 300 (año 1974) el porcentaje de peso de de la estructura de materiales compuestos al peso de la estructura total era del 4%, en el Airbus 320 (año 1982) era del 8%, en el Airbus 320 (año 1988) se acerca al 20%. En los últimos años el Airbus A380 tiene un 25% de materiales compuestos, en el A400M un 30%, y finalmente en el 350 un 53%.
En otros sectores el uso de los materiales compuestos ha aumentado también los últimos años, son el caso de la industria automovilística, la industria naval, la industria química, el sector deportivo y en ingeniería civil.

Introducción
4
Material Fracción en volumen de fibra (%)
Módulo de Elasticidad
E (MPa)
Resistencia a la tracción σu (GPa)
Densidad ρ (g/cm3)
Módulo específico
(E/ ρ)
Resistencia específica
(σu/ ρ)
Acero - 210 0.45-0.83 7.8 26.9 0.058-0.106
Aluminio 2024-T4
- 73 0.41 2.7 27.0 0.152
Aluminio 6061-T6
- 69 0.26 2.7 25.5 0.096
Vidrio(E)-Epoxi
57 21.5 0.57 1.97 10.9 0.26
Kevlar 49-Epoxi
60 40 0.80 1.40 29.0 0.57
Carbono-Epoxy
60 83 0.97 1.54 53.9 0.63
Tabla 1-3 Comparación de propiedades de materiales convencionales y laminados “cross-ply” de materiales compuestos.
1.2 Daño en Materiales Compuestos
Con el creciente uso de este tipo de materiales hace que sea necesario un entendimiento más profundo de los fallos que pueden aparecer en este tipo de materiales.
Estos fallos se producen a diferentes escalas. A escala macroscópica, los fallos más importantes que exhiben estos materiales son la propagación de grietas en la capa adhesiva entre las diferentes capas de un laminado y la delaminación entre las diferentes laminas. A escala microscopia, es decir del orden del radio de la fibra, se pueden producir el fallo de la fibra si la dirección de la carga es la misma que la de la fibra, o que aparezcan grietas en las direcciones transversales a la fibra.
Lo deseable es que el material compuesto trabaje con cargas cuya dirección sea la de la fibra, ya que es esa dirección la que presenta mejores propiedades. En la dirección transversal a la fibra, las propiedades son peores por lo que grietas en este plano son realmente desfavorables. En la mayoría de los casos estas grietas se inician en la interfase que existe entre la fibra y la matriz, y una vez que crece se propaga hacia la matriz.
1.3 Modelos de Mecánica de la Fractura no singular: Modelo de Zona Cohesiva y Modelo de Interfase Elástica Lineal Frágil (LEBIM)
Si se utiliza la mecánica de la fractura elástica lineal para simular la propagación de la grieta, hace que no se pueda realizar el modelado de la iniciación de la misma. Durante los últimos años, otros modelos han sido desarrollados como son los Modelos de Zona Cohesiva (CZM) [4, 7, 14, 28] y los modelos de interfase lineal elástica [9, 13, 17].
1.3.1 Modelo de Zona Cohesiva
Estos tipos de modelo son capaces de estudiar tanto la iniciación como el crecimiento de la grieta. Fue desarrollado en los años 60 para modelar tanto roturas frágiles como roturas dúctiles. Este modelo es ampliamente usado para modelar daños en el hormigón [7]. En los últimos años también se ha aplicado para el estudio de materiales compuestos, tanto problemas de delaminación, como en problemas de rotura de la interfase matriz-fibra [6, 18, 19, 20, 34].
5
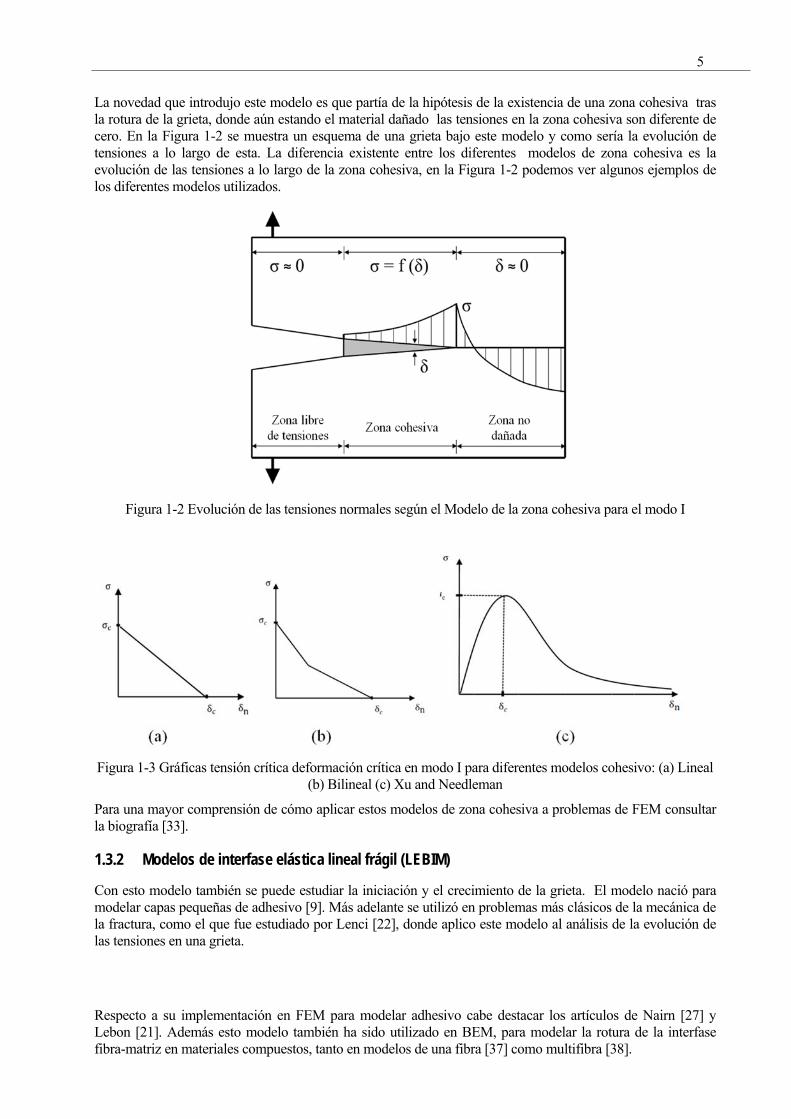
La novedad que introdujo este modelo es que partía de la hipótesis de la existencia de una zona cohesiva tras la rotura de la grieta, donde aún estando el material dañado las tensiones en la zona cohesiva son diferente de cero. En la Figura 1-2 se muestra un esquema de una grieta bajo este modelo y como sería la evolución de tensiones a lo largo de esta. La diferencia existente entre los diferentes modelos de zona cohesiva es la evolución de las tensiones a lo largo de la zona cohesiva, en la Figura 1-2 podemos ver algunos ejemplos de los diferentes modelos utilizados.
Figura 1-2 Evolución de las tensiones normales según el Modelo de la zona cohesiva para el modo I
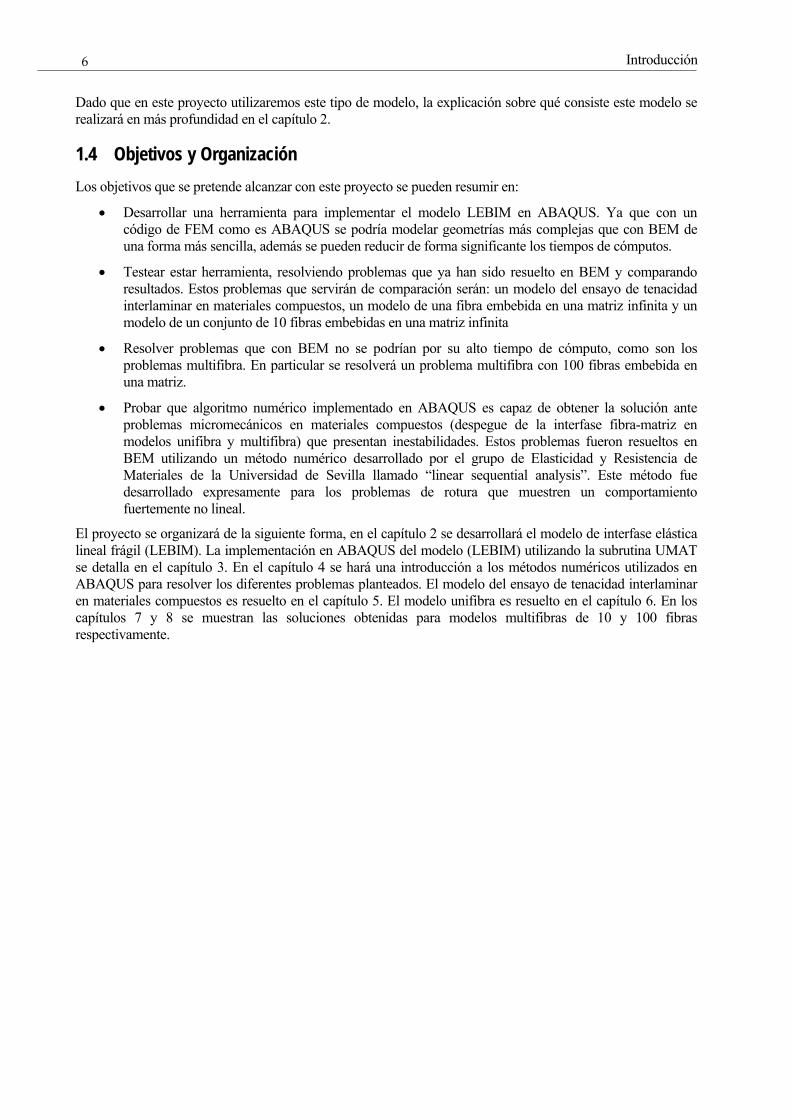
Figura 1-3 Gráficas tensión crítica deformación crítica en modo I para diferentes modelos cohesivo: (a) Lineal (b) Bilineal (c) Xu and Needleman
Para una mayor comprensión de cómo aplicar estos modelos de zona cohesiva a problemas de FEM consultar la biografía [33].
1.3.2 Modelos de interfase elástica lineal frágil (LEBIM)
Con esto modelo también se puede estudiar la iniciación y el crecimiento de la grieta. El modelo nació para modelar capas pequeñas de adhesivo [9]. Más adelante se utilizó en problemas más clásicos de la mecánica de la fractura, como el que fue estudiado por Lenci [22], donde aplico este modelo al análisis de la evolución de las tensiones en una grieta.
Respecto a su implementación en FEM para modelar adhesivo cabe destacar los artículos de Nairn [27] y Lebon [21]. Además esto modelo también ha sido utilizado en BEM, para modelar la rotura de la interfase fibra-matriz en materiales compuestos, tanto en modelos de una fibra [37] como multifibra [38].
Introducción
6
Dado que en este proyecto utilizaremos este tipo de modelo, la explicación sobre qué consiste este modelo se realizará en más profundidad en el capítulo 2.
1.4 Objetivos y Organización
Los objetivos que se pretende alcanzar con este proyecto se pueden resumir en:
Desarrollar una herramienta para implementar el modelo LEBIM en ABAQUS. Ya que con un código de FEM como es ABAQUS se podría modelar geometrías más complejas que con BEM de una forma más sencilla, además se pueden reducir de forma significante los tiempos de cómputos.
Testear estar herramienta, resolviendo problemas que ya han sido resuelto en BEM y comparando resultados. Estos problemas que servirán de comparación serán: un modelo del ensayo de tenacidad interlaminar en materiales compuestos, un modelo de una fibra embebida en una matriz infinita y un modelo de un conjunto de 10 fibras embebidas en una matriz infinita
Resolver problemas que con BEM no se podrían por su alto tiempo de cómputo, como son los problemas multifibra. En particular se resolverá un problema multifibra con 100 fibras embebida en una matriz.
Probar que algoritmo numérico implementado en ABAQUS es capaz de obtener la solución ante problemas micromecánicos en materiales compuestos (despegue de la interfase fibra-matriz en modelos unifibra y multifibra) que presentan inestabilidades. Estos problemas fueron resueltos en BEM utilizando un método numérico desarrollado por el grupo de Elasticidad y Resistencia de Materiales de la Universidad de Sevilla llamado “linear sequential analysis”. Este método fue desarrollado expresamente para los problemas de rotura que muestren un comportamiento fuertemente no lineal.
El proyecto se organizará de la siguiente forma, en el capítulo 2 se desarrollará el modelo de interfase elástica lineal frágil (LEBIM). La implementación en ABAQUS del modelo (LEBIM) utilizando la subrutina UMAT se detalla en el capítulo 3. En el capítulo 4 se hará una introducción a los métodos numéricos utilizados en ABAQUS para resolver los diferentes problemas planteados. El modelo del ensayo de tenacidad interlaminar en materiales compuestos es resuelto en el capítulo 5. El modelo unifibra es resuelto en el capítulo 6. En los capítulos 7 y 8 se muestran las soluciones obtenidas para modelos multifibras de 10 y 100 fibras respectivamente.
7
2 MODELO DE INTERFASE LINEAL ELÁSTICO FRÁGIL (LEBIM)
l comportamiento de la interfase ha sido modelado como una distribución de muelles que conectan la matriz con la fibra. Este comportamiento ha sido utilizado en muchas ocasiones [9,13, 21] para modelar capas de adhesivos de pequeño espesor. En los artículos este comportamiento para adhesivos ha sido
llamado como “weak interfase”, “imperfect interfase” o “elastic interfase”. Su extrapolación para modelar el comportamiento de una interfase fue llevada por el Grupo de Elasticidad y Resistencia de Materiales de la Universidad de Sevilla, concretamente por Luis Távara y colaboradores [36] y denominaron este modelo de interfase como “Linear Elastic Brittle Interfase Model” (LEBIM). Una de las ventajas de este modelo es que modela de una forma sencilla la propagación de la rotura a través de la interfase, si lo comparamos con otros modelos de interfase más complejos como son los modelos cohesivos. Otra característica que tiene este modelo, si lo comparamos con los modelos cohesivos es que su comportamiento es frágil a diferencia de los modelos cohesivos.
En este capítulo se describirá en primer lugar el comportamiento lineal de la interfase, y en segundo lugar el criterio de fallo de la interfase.
2.1 Comportamiento de la interfase
La interfase no dañada se puede modelar como una distribución continua de muelles, al ser este modelo muy utilizado en el modelado de capas finas de adhesivos, se describirá en primer lugar este modelo para el caso de una capa muy fina de adhesivo y posteriormente particularizaremos para el caso de la interfase.
En primer lugar deberemos de relacionar las propiedades de los muelles que modelan el adhesivo, con las propiedades elásticas de este. Siendo las propiedades elásticas del adhesivo sin dañar: Módulo de Young El, coeficiente de Poisson νl, parámetro de Lamé λl, modulo a cortadura μl.
Propiedades elásticas
Módulo de Young lE
Coeficiente de Poisson l
Parámetro de Lame l
Módulo a cortadura l
Tabla 2-1 Nomenclatura de las propiedades de la interfase.
E
Modelo de interfase lineal elástico frágil (LEBIM)
8
Teniendo en cuenta que lo que estamos buscando es una relación entre la tensión normal y el desplazamiento relativo normal (σ-δn), y entre las tensiones tangenciales y los desplazamientos relativos asociados a esta tensión (τ-δt), buscaremos obtener los valores de las rigideces de los muelles (kn,kt).
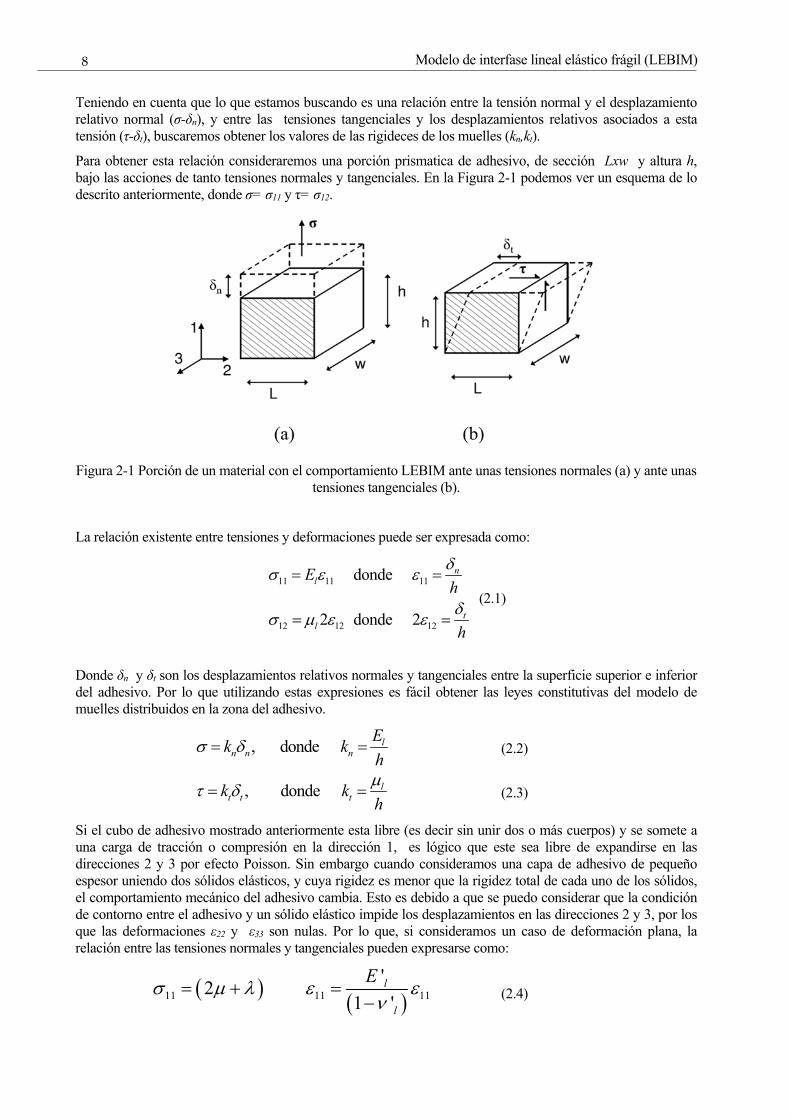
Para obtener esta relación consideraremos una porción prismatica de adhesivo, de sección Lxw y altura h, bajo las acciones de tanto tensiones normales y tangenciales. En la Figura 2-1 podemos ver un esquema de lo descrito anteriormente, donde σ= σ11 y τ= σ12.
Figura 2-1 Porción de un material con el comportamiento LEBIM ante unas tensiones normales (a) y ante unas tensiones tangenciales (b).
La relación existente entre tensiones y deformaciones puede ser expresada como:
11 11 11
12 12 12
donde
2 donde 2
nl
tl
Eh
h
(2.1)
Donde δn y δt son los desplazamientos relativos normales y tangenciales entre la superficie superior e inferior del adhesivo. Por lo que utilizando estas expresiones es fácil obtener las leyes constitutivas del modelo de muelles distribuidos en la zona del adhesivo.
, donde ln n n
Ek k
h (2.2)
, donde lt t tk k
h
(2.3)
Si el cubo de adhesivo mostrado anteriormente esta libre (es decir sin unir dos o más cuerpos) y se somete a una carga de tracción o compresión en la dirección 1, es lógico que este sea libre de expandirse en las direcciones 2 y 3 por efecto Poisson. Sin embargo cuando consideramos una capa de adhesivo de pequeño espesor uniendo dos sólidos elásticos, y cuya rigidez es menor que la rigidez total de cada uno de los sólidos, el comportamiento mecánico del adhesivo cambia. Esto es debido a que se puedo considerar que la condición de contorno entre el adhesivo y un sólido elástico impide los desplazamientos en las direcciones 2 y 3, por los que las deformaciones ε22 y ε33 son nulas. Por lo que, si consideramos un caso de deformación plana, la relación entre las tensiones normales y tangenciales pueden expresarse como:
11 11 11
'2
1 'l
l
E
(2.4)
9
Donde 2' 1l l lE E y ' 1l l l . Teniendo en cuenta las ecuaciones (2.4) el valor de kn puede
ser expresado como:
2
12 '
1 1 21 'l ll l l
nl ll
EEk
h hh
(2.5)
En el caso del valor de tk , este sigue siendo el mismo que en (2.3), ya que no existe efecto asociado a las
tensiones tangenciales. De las ecuaciones (2.5) y (2.3) se observa que la relación entre kn/kt es:
2 12 2
1 ' 1 2ln l
t l l l
k
k
(2.6)
Lo que implica que la relación entre estos valores estará entre 2 ≤ kn/kt ≤ ∞. También se puede considerar la inversa de la relación anterior, y de esta forma obtener una relación de valores de rigideces acotado.
1 2
2 1t l
n l
k
k
(2.7)
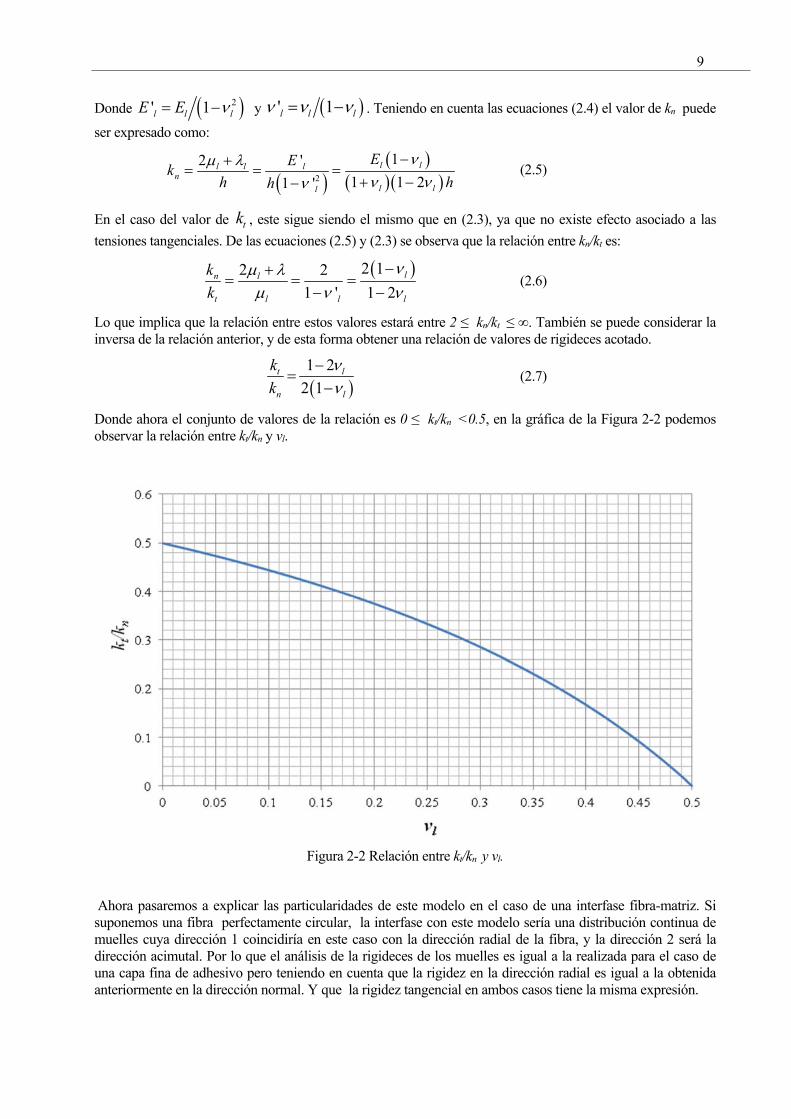
Donde ahora el conjunto de valores de la relación es 0 ≤ kt/kn <0.5, en la gráfica de la Figura 2-2 podemos observar la relación entre kt/kn y νl.
Figura 2-2 Relación entre kt/kn y νl.
Ahora pasaremos a explicar las particularidades de este modelo en el caso de una interfase fibra-matriz. Si suponemos una fibra perfectamente circular, la interfase con este modelo sería una distribución continua de muelles cuya dirección 1 coincidiría en este caso con la dirección radial de la fibra, y la dirección 2 será la dirección acimutal. Por lo que el análisis de la rigideces de los muelles es igual a la realizada para el caso de una capa fina de adhesivo pero teniendo en cuenta que la rigidez en la dirección radial es igual a la obtenida anteriormente en la dirección normal. Y que la rigidez tangencial en ambos casos tiene la misma expresión.
Modelo de interfase lineal elástico frágil (LEBIM)
10
2.2 Criterio de fallo de la interfase
En este criterio de fallo la rotura de la interfase es modelada como una caída abrupta de las tensiones. Las ecuaciones que describen el comportamiento de la interfase sin dañar y la interfase dañada son:
( ) yInterfase no dañada
( )
0 0
Interfase rota 0
0
n n n nc G
t t t tc G
n
n n n
x k x x x
x k x x x
xx
k x x
x
(2.8)
Donde σ(x) y τ(x) son las tensiones normales y tangenciales respectivamente, δn y δt son los desplazamientos normales y tangenciales entre puntos opuestos de la interfase, cuando la interfase está rota estos desplazamientos son iguales a la apertura entre los labios de la grieta. kt y kn son las rigideces normal y tangencial de la distribución de muelles.
Un hecho a resaltar es que todas las variables críticas son función del ángulo de mixticidad del modo de fractura ψG en el punto de la interfase. Por lo que se podría obtener diferentes valores de estas variables criticas dependiendo del punto de la interfase en que nos encontremos. Esta variable, ψG, será descrita más adelante.
El comportamiento descrito en las ecuaciones (2.8) es que cuando el desplazamiento en “un muelle” alcanza cualquiera de los desplazamientos críticos, la rigidez tangencial de este muelle pasa a ser cero, y por lo tanto el valor de la tensión tangencial también.
Si ahora analizamos el comportamiento en la dirección normal, si las tensiones son de tracción, el comportamiento es equivalente al tangencial descrito anteriormente. En cambio si a “un muelle roto” de la interfase se le somete a compresión estando ya roto este sigue teniendo rigidez, es decir, se está utilizando una condición de contacto sin rozamiento (tipo penalti). El uso de esta condición de contacto está basada en la idea de que una vez rota la interfase, parece razonable pensar que esta se puede comprimir con la misma rigidez en la dirección radial (normal si es una capa de adhesivo) que antes de la rotura.
Este modelo representa una aproximación simple a la realidad, ya que muchos materiales presentan una rama ablandamiento o “softening branch” en la ley de comportamiento, una vez alcanzada las tensiones máximas. Este comportamiento puede afectar a la energía disipada en la rotura. Pero el parámetro que realmente es importante en estos tipos de modelos es la energía crítica de rotura. Así diferentes modelos cohesivos pueden dar un resultado muy parecidos comparándolos entre sí o con este modelo (LEBIM) si utilizan el mismo valor de energía necesaria para que se produzca el crecimiento de la grieta. Si bien la explicación de por qué ocurre esto, traspasa el objetivo de este proyecto, uno de los motivos es que la energía almacenada en zonas con comportamiento no lineal (una vez superado la tensión máxima) es pequeña comparada con la energía almacenada en las zonas de comportamiento lineal.
El criterio de fallo está basado en el ERR (Energy Relase Rate o índice de liberación de energía en español). Para el caso de una interfase lineal, el ERR se define como la energía de deformación elástica almacenada por unidad de longitud en los labios de la grieta. Por lo que la ERR en modo mixto de la interfase se puede definir como [22]:
2 2n t
I IIG G G
(2.9)
Que puede ser reescrita utilizando sólo las tensiones o el desplazamiento relativo de las superficies.
2 22 2
2 2 2 2n n t t
n t
k kG
k k
(2.10)
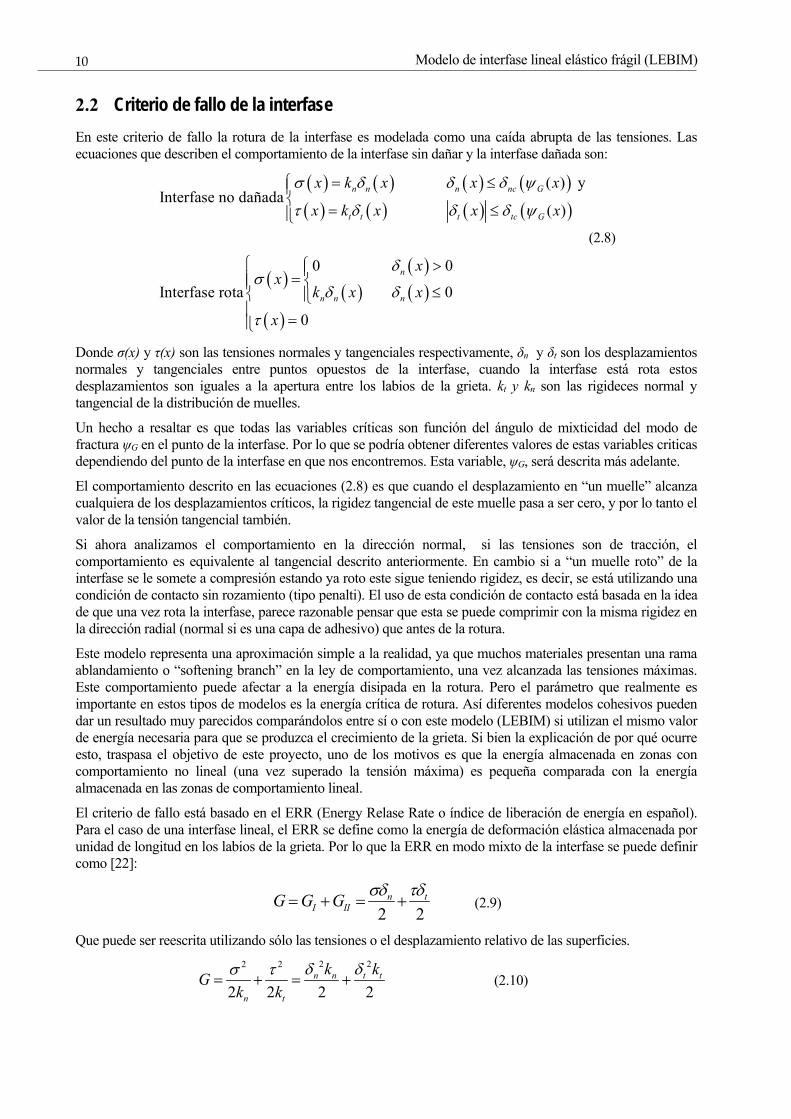
11
Figura 2-3 Comportamiento (a) normal y (b) tangencial cuando la interfase no se encuentra dañada en el modelo LEBIM. Comportamiento (c) normal y (d) tangencial del modelo cuando la interfase se encuentra
dañada.
Debemos tener en cuenta que la definición de la ERR en modo I, es sólo válida para tensiones de tracción, si la interfase está sometida sólo a tensiones de compresión la GI almacenada se considerará cero. A continuación se definirá el ángulo de mixticidad, en primer lugar partiremos de la ecuación (2.9):
2 21 tan tan III II I G G
I
GG G G G
G (2.11)
Podemos ver que si aplicamos la definición de GI, para tensiones de compresión implica que ψG=90º. Esta expresión (2.11) puede reescribirse como:
2 21 tan 1 tann tI II I I u
t n
k kG G G G G
k k
(2.12)
Donde
tan tan tu
n
y
(2.13)
Las relaciones entre esos ángulos y el ángulo de mixiticidad, para una σ ≥ 0
Modelo de interfase lineal elástico frágil (LEBIM)
12
tan tan tan tant nG u G
n t
k ky
k k (2.14)
Se puede observar que una rotura de la interfase en modo I puro implica un valor del ángulo de mixticidad de
0º, es decir, 0º 0ºG u . Y que la propagación de la grieta en modo II implica un valor de 90º.
En este modelo, el criterio seguido para que la grieta se propague es que G sea mayor o igual que su valor crítico, Gc:
CG G (2.15)
Se ha observado en varios experimentos la dependencia de Gc respecto al modo mixto al que está sometido el material [3, 10], lo que hace que el ángulo de mixticidad tengo una gran relevancia al describir la rotura de la interfase. Para expresar el valor crítico de Gc en función de la mixticidad en la fractura usaremos la expresión propuesta por [15], que se considera adecuada para un gran número de sistemas de dos materiales
21 tan 1c Ic GG G (2.16)
Donde
22
2 2 2ncc nc c n
Icn
kG
k
(2.17)
Es la energía crítica a fractura en el modo I. λ es un parámetro de sensibilidad al modo de fractura, cuyo valor suele rondar 0.2 ≤ λ ≤ 0.3, estos valores hacen que haya una dependencia moderada con el modo de fractura.
La tensión normal que provoca la rotura del “muelle” de la interfase se representada por c y el
desplazamiento normal en ese momento es representado por nc , aplicando la definición del ángulo de
mixticidad se puede expresar estos parámetros como 0ºc c y 0ºnc nc
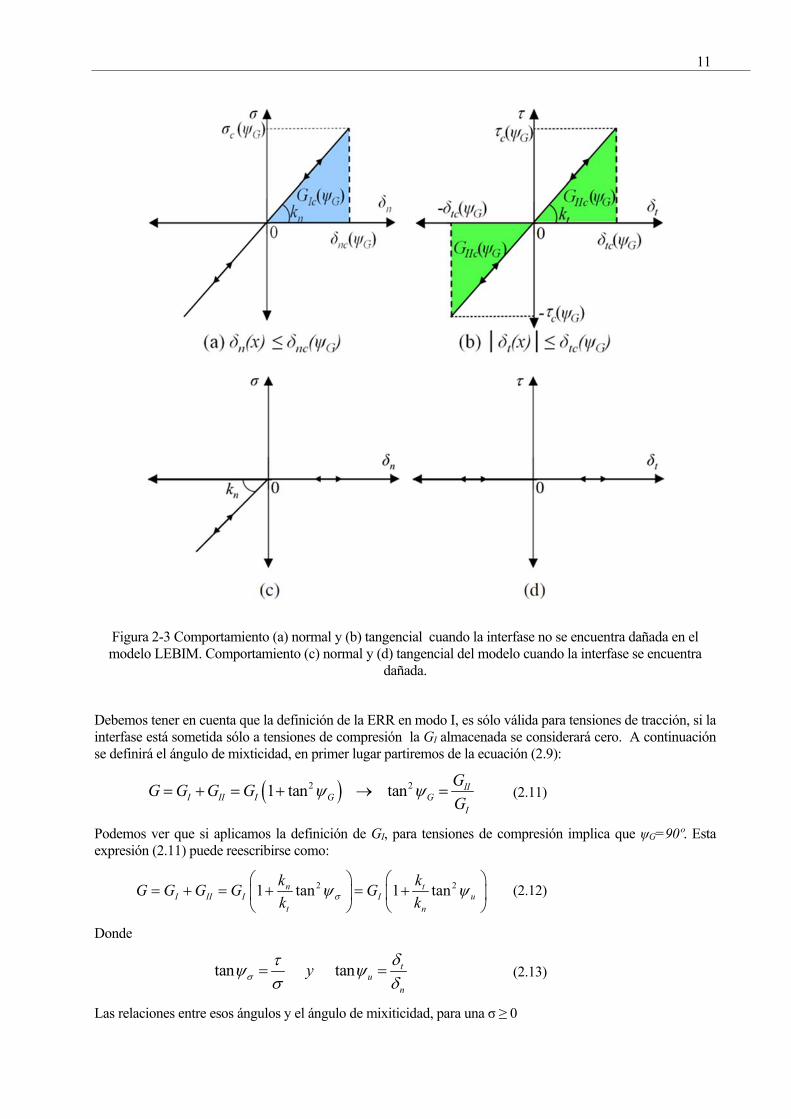
Figura 2-4 Evolución del incide de liberación de energía crítico, Gc, en función de ψG y de diferentes valores de λ
Como podemos observar en la Figura 2-4, si λ=0 la interfase nunca romperá en modo dos puro, debido a la existencia de una asíntota para ψG=90º. Un comportamiento más realista se consigue acotando el valor de este parámetro entre 0< λ<1. Otra conclusión que podemos sacar de la gráfica es la rotura en el modo II será más
13
fácil que aparezca cuanto mayor es el valor de λ.
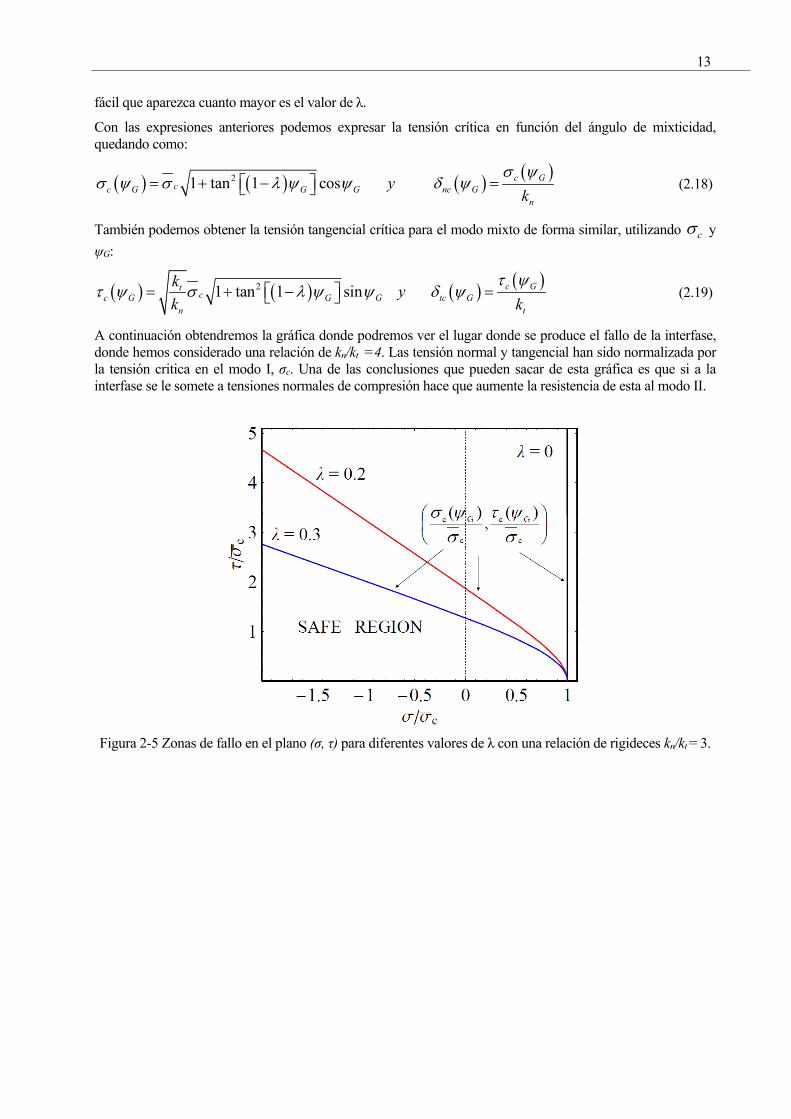
Con las expresiones anteriores podemos expresar la tensión crítica en función del ángulo de mixticidad, quedando como:
21 tan 1 cos c Gcc G G G nc G
n
yk
(2.18)
También podemos obtener la tensión tangencial crítica para el modo mixto de forma similar, utilizando c y
ψG:
21 tan 1 sin c Gtcc G G G tc G
n t
ky
k k
(2.19)
A continuación obtendremos la gráfica donde podremos ver el lugar donde se produce el fallo de la interfase, donde hemos considerado una relación de kn/kt =4. Las tensión normal y tangencial han sido normalizada por la tensión critica en el modo I, σc. Una de las conclusiones que pueden sacar de esta gráfica es que si a la interfase se le somete a tensiones normales de compresión hace que aumente la resistencia de esta al modo II.
Figura 2-5 Zonas de fallo en el plano (σ, τ) para diferentes valores de λ con una relación de rigideces kn/kt = 3.

Modelo de interfase lineal elástico frágil (LEBIM)
14
15
3 SUBRUTINA UMAT DE ABAQUS
ara poder implementar el comportamiento de la interfase descrito en el capítulo 2 en el código de elementos finitos ABAQUS, se ha utilizado la subrutina UMAT. Gracias a esta subrutina podemos implementar cualquier modelo de comportamiento que el usuario desee y que no esté incluido en la
librería de materiales de ABAQUS.
La subrutina UMAT define el comportamiento mecánico del material. Si se deseara definir el otro tipo de comportamiento del material (térmico, electromagnético, etc.) se debería de acudir a otros tipos de subrutinas.
Además de la subrutina UMAT, el comportamiento del material puede implementarse en la subrutina VUMAT. La subrutina UMAT se utiliza en el caso en que estemos utilizando la librería tipo ABAQUS Standard. Al utilizar este tipo de librería nos aseguramos que en cada iteración se compruebe que se cumple el equilibrio. Por otro lado, la subrutina VUMAT es equivalente a la UMAT en el caso que estemos usando las librerías tipo ABAQUS Implicit, al utilizar este tipo de librerías no se comprueba que la solución este en equilibrio para todas las iteraciones, por lo que habrá que verificar la solución final.
En este capítulo describiremos brevemente las variables utilizadas en la subrutina y el funcionamiento de la subrutina. Para una información más detallada del funcionamiento de la subrutina UMAT acudir a [1].Al final de este capítulo se detallará la programación del modelo elástico lineal frágil (LEBIM) en la UMAT.
3.1 Variables
A continuación se van a explicar las principales variables de la UMAT que se van utilizan en la implementación del comportamiento de nuestra interfase. En primer lugar definiremos algunas de las variables que tendremos que definir. Estas variables pueden tener un valor inicial asignado el cual deberá de ser actualizado, para luego devolvérselo a ABAQUS:
DDSDDE (NTENS, NTENS): Matriz jacobiana del modelo del material. En nuestro modelo supondremos pequeñas deformaciones de la interfase por lo que la matriz jacobiana puede ser
expresada como C , donde es el incremento de tensiones, y es el incremento
de las deformaciones. Los componentes de la matriz DDSDDE (I, J) se pueden entender como el cambio sufrido en la tensión i-ésima al final del incremento, causado por una perturbación infinitesimal en la componente j-ésima del vector de deformación En ABAQUS/Standard se utilizará sólo la parte simétrica de DDSDDE, a no ser que se habilite la resolución de ecuaciones no-simétricas para el material definido.
STRESS (NTENS): Es un vector el cuál contiene el tensor de tensiones en la notación reducida de Voight al comienzo de la subrutina, y tiene que actualizarse en la subrutina para ser el tensor tensiones al final de la iteración. Las tensiones tendrán las direcciones locales del elemento.
STATEV (NSTATEV): Es un vector donde podremos guardar una variable que dependa de la solución de las variables de estado (tensión y deformación). Existe una variable STATEV por cada punto de integración del modelo, y el valor al comienzo de una iteración es el valor del incremento anterior, a no ser que se modifique con unas de las subrutinas USDFLD o UEXPAN. El tamaño de este vector se define usando la orden DEVPAR (en el archivo inp al llamar al material). También hay
P
Subrutina UMAT de ABAQUS
16
que tener en cuenta que las variables STATEV, se mostraran en el archivo de salida (odb) con el nombre de SDVs (solution-dependnt variables)
Variables que se pasan como información
STRAN (NTENS): Un vector el cuál contiene el tensor de deformaciones en la notación reducida de Voigh total al principio del incremento. Estas deformaciones tendrán la dirección local del elemento.
DSTRAN (NTENS): Vector que contiene las variaciones de las deformaciones. Este incremento de deformaciones tendrán la dirección local del elemento.
NTENS: Número de componentes del pseudovector de Tensiones, el cual depende del tipo de elemento que se utilice. En elementos de tensión plana el número de componentes es de 3, en el caso de deformación plana son 4 y para el caso tridimensional es de 6.
NSTATEV: Número de variables dependientes de las variables de solución
NOEL: Número del elemento
NPT: Número del punto de integración
KSTEP: Número del step
KINC: Número del incremento.
3.2 Funcionamiento
A continuación se detallará, brevemente, el funcionamiento de la subrutina. En primer lugar hay que tener en cuenta como ABAQUS resuelve los modelos de MEF. Supondremos que estamos ante modelos de un solo “step”. Un “step” se puede entender como un caso de carga, ya que a cada “step” se le asocia unas condiciones de contorno y unas cargas. Pero además de esto podemos hacer que un nuevo “step” obtenga las características modificadas del modelo por otro “step”, por el ejemplo supongamos que estamos ante un modelo con un comportamiento elasto-plástico y sometemos al modelo a un “step” que produce la plastificación de cierta zona del modelo, podríamos crear un step que siguiera al anterior con lo que el nuevo “step” tendría plastificada esa zona del modelo.
Al “step” se le asigna un tiempo, el cual tiene significado físico si estamos en un caso dinámico, pero como el análisis que realizaremos es un análisis estático este tiempo carece de alguna relación con el tiempo físico. Los steps están compuestos por incrementos, y en cada incremento se aplica un “incremento” de las cargas aplicadas. En cada incremento se realizan una serie de iteraciones para llegar al equilibrio con las cargas correspondientes a este incremento. En el caso que se haya utilizado el máximo de iteraciones permitidas y el problema no llegue a converger, se desecha la solución que no alcanzó el equilibrio y se realiza un nuevo incremento con un paso de carga menor al que se ha dado anteriormente. Toda esta información es mostrada en los archivos con la terminación “.sta”.
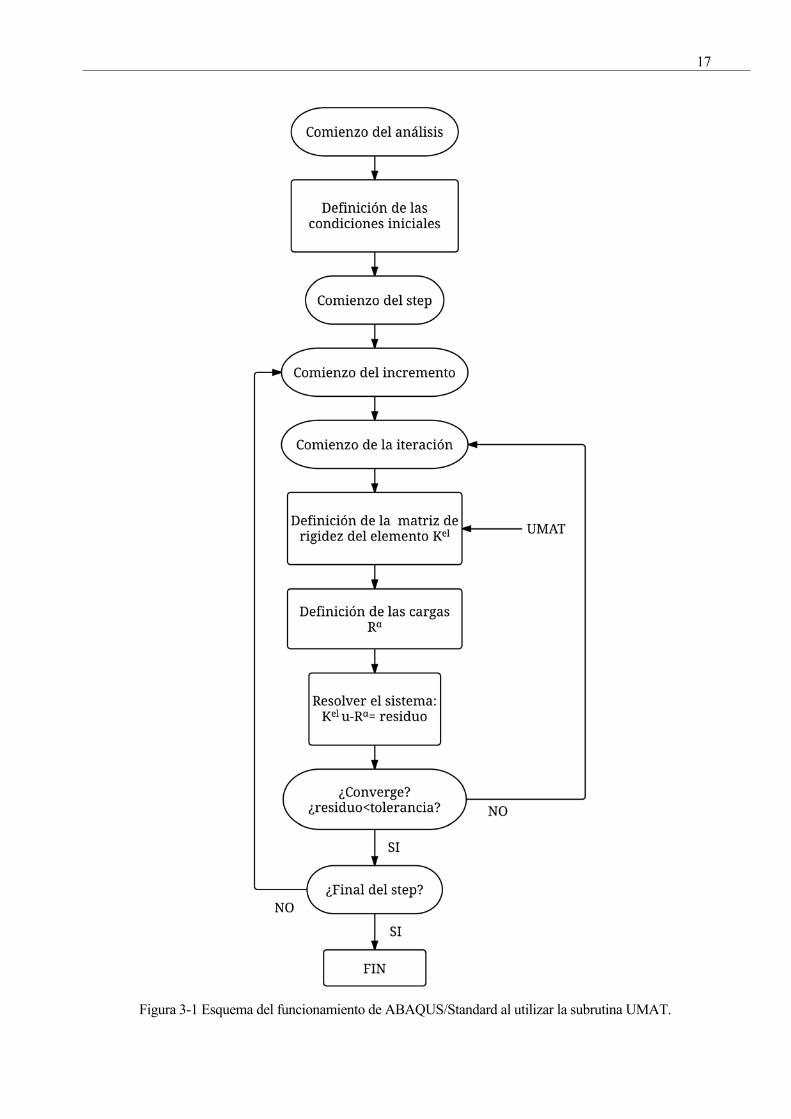
En la Figura 3-1 podemos ver un esquema del proceso que sigue ABAQUS para resolver los problemas, y donde llama a la subrutina UMAT. Si bien el esquema indicado puede mostrar de una forma sencilla el funcionamiento de ABAQUS y donde se ejecuta la subrutina UMAT, no es válido para la primera iteración de cualquier elemento. En esta primera iteración la subrutina UMAT es llamada dos veces, en la primera llamada la matriz de rigidez es montada usando la configuración de la situación inicial en el incremento. En la segunda llamada se actualiza la rigidez basándose en la configuración actualizada de la iteración anterior. En las demás iteraciones la configuración inicial estará basada en la iteración anterior.
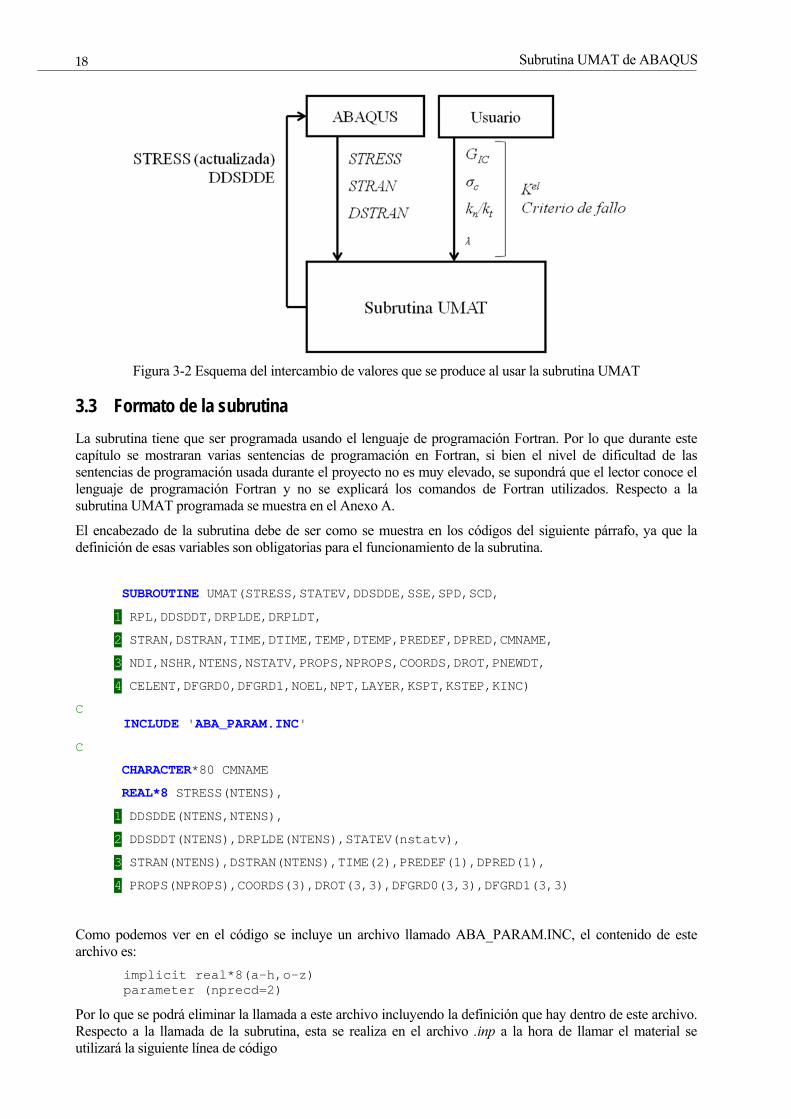
En cada iteración que se realiza para buscar el equilibrio y para cada punto de integración de cada elemento se ejecuta la subrutina UMAT. En la Figura 3-2 podemos ver un esquema donde se muestra el traspaso de variables existente en ABAQUS, el usuario y la subrutina. Las variables que se muestran en esta figura son utilizadas para definir la rigidez del elemento Kel y el criterio de fallo definido en el capítulo 2.
Para cada iteración ABAQUS pasa a la subrutina las tensiones al comienzo de la iteración, las deformaciones al comienzo de la iteración y el incremento de deformaciones previstos. A partir de los datos que hemos introducido a la subrutina debemos devolverle a ABAQUS la matriz jacobiana y las tensiones actualizadas.
17
Figura 3-1 Esquema del funcionamiento de ABAQUS/Standard al utilizar la subrutina UMAT.
Subrutina UMAT de ABAQUS
18
Figura 3-2 Esquema del intercambio de valores que se produce al usar la subrutina UMAT
3.3 Formato de la subrutina
La subrutina tiene que ser programada usando el lenguaje de programación Fortran. Por lo que durante este capítulo se mostraran varias sentencias de programación en Fortran, si bien el nivel de dificultad de las sentencias de programación usada durante el proyecto no es muy elevado, se supondrá que el lector conoce el lenguaje de programación Fortran y no se explicará los comandos de Fortran utilizados. Respecto a la subrutina UMAT programada se muestra en el Anexo A.
El encabezado de la subrutina debe de ser como se muestra en los códigos del siguiente párrafo, ya que la definición de esas variables son obligatorias para el funcionamiento de la subrutina.
SUBROUTINE UMAT(STRESS,STATEV,DDSDDE,SSE,SPD,SCD,
1 RPL,DDSDDT,DRPLDE,DRPLDT,
2 STRAN,DSTRAN,TIME,DTIME,TEMP,DTEMP,PREDEF,DPRED,CMNAME,
3 NDI,NSHR,NTENS,NSTATV,PROPS,NPROPS,COORDS,DROT,PNEWDT,
4 CELENT,DFGRD0,DFGRD1,NOEL,NPT,LAYER,KSPT,KSTEP,KINC)
C INCLUDE 'ABA_PARAM.INC'
C
CHARACTER*80 CMNAME
REAL*8 STRESS(NTENS),
1 DDSDDE(NTENS,NTENS),
2 DDSDDT(NTENS),DRPLDE(NTENS),STATEV(nstatv),
3 STRAN(NTENS),DSTRAN(NTENS),TIME(2),PREDEF(1),DPRED(1),
4 PROPS(NPROPS),COORDS(3),DROT(3,3),DFGRD0(3,3),DFGRD1(3,3)
Como podemos ver en el código se incluye un archivo llamado ABA_PARAM.INC, el contenido de este archivo es:
implicit real*8(a-h,o-z) parameter (nprecd=2)
Por lo que se podrá eliminar la llamada a este archivo incluyendo la definición que hay dentro de este archivo. Respecto a la llamada de la subrutina, esta se realiza en el archivo .inp a la hora de llamar el material se utilizará la siguiente línea de código
19
…
*Material, name=material1
*USER MATERIAL, CONSTANTS=0
*Depvar
1,
**
…
Con el comando Depvar definimos cuantas variables dependientes de las soluciones queremos definir, en nuestro caso es sólo una. En el código mostrado vemos que se define CONSTANTS=0, es decir que no se le suministra ninguna constante a la subrutina. Si quisiéramos suministrarle alguna constante el código a utilizar debería de ser parecido a este: … *Material, name=material1 *USER MATERIAL, CONSTANTS=3 constante1, constante2, constante3, *DEPVAR 1, ** … En la subrutina podríamos usar estos valores usando las variables “ props(1), props(2), props(3)…,” que serán las constante 1, 2, 3 respectivamente.
3.4 Implementación del LEBIM en la subrutina UMAT.
A continuación se describirá como se ha realizado la implementación del LEBIM, el cuál ha sido explicado en el capítulo 2. Para exponer la programación de la interfase de una forma sencilla y clara se ha utilizado el diagrama de flujo de la Figura 3-3, utilizando el nombre de las variables que se ha utilizado en el código UMAT. Pasamos a explicar el significado de las variables utilizadas.
Kinc: cómo ya se dijo en las variables definidas por ABAQUS en la subrutina, esta variable nos indica en el número de incremento donde nos encontramos.
idano: es la variable de daño que utilizaremos en el código, su valor será 1 en el caso en que la interfase no esté dañada, y 2 cuando el daño se haya producido. Existe una variable idano para cada punto de integración del modelo.
DDS(i,j): es una variable que hemos defino, y en la que guardamos la matriz jacobiana del material.
STRESS(i): es el vector de tensiones que nos proporciona ABAQUS
DSTRAN(i): es el incremento de deformaciones que sufre el material en la iteración y es proporcionado por ABAQUS.
DSTRESS(i): variable que hemos definido para obtener las tensiones que generan el incremento de deformaciones bajo el supuesto comportamiento de nuestro material. Subapartado (3.1)
t: es la tensión equivalente que se utilizó en el apartado (3.1) para aplicar el criterio de rotura, su expresión es (3.5)
tc:. Su expresión es (3.6). Si se alcanza esta tensión equivalente en algún punto de la interfase, implicará la rotura de la misma.
Knn: es la rigidez en la dirección radial de la interfase.
σnn: tensión en la dirección normal de la interfase.
Subrutina UMAT de ABAQUS
20
DDSDDE(i,j): Como se indico en el subapartdo 3.1 es la matriz Jacobiana la cual debemos de devolver a ABAQUS.
STATEV: variable que se utiliza para pasar valores de una iteración a otra.
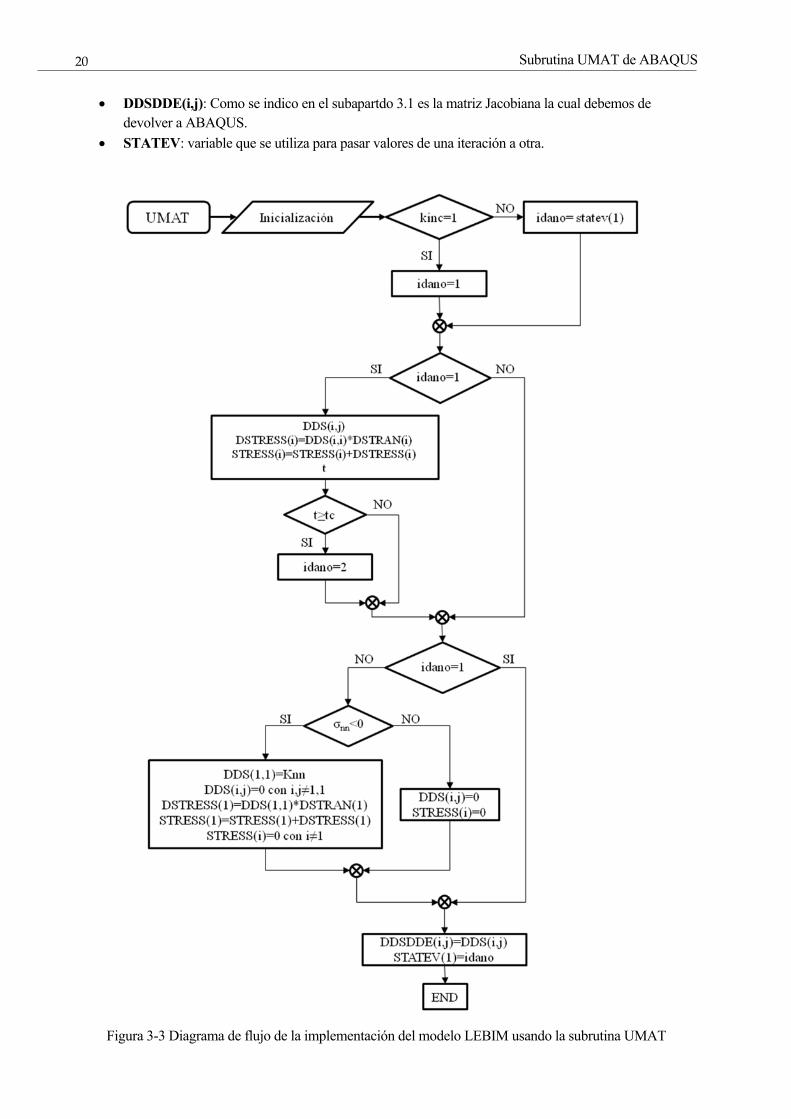
Figura 3-3 Diagrama de flujo de la implementación del modelo LEBIM usando la subrutina UMAT

21
En la Figura 3-3 se muestra el diagrama de flujo de la UMAT. La subrutina se ejecuta para cada iteración en cada punto de integración. El primer paso en cada iteración será inicializar las variables que hemos definido y asignar los valores de entrada con las variables correspondientes.
Luego si nos encontramos en el primer incremento del step, asignamos el valor 1 a la variable de daño. Si nos encontramos en un incremento diferente al primer el valor de la variable de daño será igual al valor de la iteración anterior gracias que utilizamos la variable STATEV para pasar el valor de la variable de daño de una iteración a otra.
En la segunda condición “if” comprobamos si la variable de daño nos indica que la interfase está rota. Si la interfase está dañada, la matriz jacobiana ya esta inicializada a cero por lo que pasaríamos al siguiente proceso de control. Si la interfase no está dañada calculamos las rigidices de la interfase y a través de ella la matriz jacobina del material:
2
18
33 18
02 10
04 10
c nnnn ss
Ic
nn nntt
kk h k
G
k kk k
(3.1)
33
0 0 0
0 0 0
0 0 0
0 0 0
nn
ss
tt
k
kDDS
k
k
(3.2)
Como la subrutina está pensada para el caso de deformación plana la matriz jacobiana es de dimensión 4x4 y los vectores de tensión y deformación tienen 4 componentes, ya que se incluye la tensión perpendicular al plano. Esta tensión se podría calcular, pero como no influye en nuestro modelo no la calcularemos, por lo que tomaremos un valor de la rigidez próximo a 0. En la definición de la rigidez en dirección normal, knn se ha tenido en cuenta que estamos ante una interfase o una capa de adhesivo de espesor h, y de esta forma se obtiene las rigideces con unidades de MPa.
En LEBIM la rigidez en la dirección acimutal es 0, si bien no podemos poner esta rigidez igual a 0 porque implicaría que el determinante de la matriz jacobiana fuera 0 con lo que tendríamos una matriz indeterminada. La solución tomada en este caso para evitar este problema es tomar ceros numéricos, es decir números muy pequeños comparados con los que no son cero. En nuestro caso se ha divido el valor knn entre 108.
Con la matriz jacobiana calculamos el incremento de tensiones sufrido en el modelo, y actualizamos las tensiones, como se muestra en las ecuaciones (3.3) y (3.4). Además estas ecuaciones se particularizan y desarrollan las matrices para el caso de deformación plana.
33 3333
( ) ( , ) * ( )
0 0 0
0 0 0
0 0 0
0 0 0
nn nnnn
ss ssss
tt tt
DSTRESS i DDS i j DSTRAN j
k
k
k
k
(3.3)
33 33 33
( ) ( ) ( )
nn nn nn
ss ss ss
STRESS i STRESS i DSTRESS i
(3.4)
Subrutina UMAT de ABAQUS
22
A continuación calculamos la tensión equivalente, t, y la tensión equivalente crítica, tc, para saber si la interfase está dañada. La expresión de t es la de la ecuación (3.5), y la de la tc es la de la ecuación (3.6) donde σc(ψG) y τc(ψG) están expresados en las ecuaciones (2.18) y (2.19) del capítulo 2 .Si la interfase no está dañada pasamos a la siguiente condición if. En cambio, si se ha alcanzado la tensión crítica mayor cambiamos el valor de la variable de daño a 2.
( ) ( )t STRESS STRESS 2 2 2 21 4 (3.5)
( ) ( )c c G c Gt 2 2 (3.6)
En la siguiente condición if vemos si la variable idano a alcanzado el valor 2, es decir si la interfase se ha dañado. En el caso en que la interfase se haya roto, realizaremos los cambios en la matriz jacobiana y en las tensiones dependiendo si la tensiones en la dirección radial son de compresión o de tracción. Si la interfase no se ha dañado no realizamos ninguna operación.
Para el caso en que la interfase este rota y las tensiones normales son de tracción, según nuestro modelo LEBIM todas las tensiones son ceros, y se pierde la rigidez en todas las direcciones. Como se explicó anteriormente no podemos tener una matriz jacobiana indeterminada, por lo que igualamos las rigideces a ceros numéricos.
En el caso de que las tensiones normales sean de compresión y la matriz este dañada, la única rigidez que es diferente de 0 es la normal. Por lo que también la única tensión que es diferente de 0 será la normal, con lo que la única tensión a actualizar es esta.
Una vez realizado todo ese proceso, sólo queda igualar la variable STATEV a la de daño para poder utilizarla en la siguiente iteración y actualizar la matriz DDSDDE a la matriz jacobiana DDS.

23
4 MÉTODOS NUMÉRICOS UTILIZADOS
omo se verá más adelante, en algunos de los problemas planteados conllevan una serie de inestabilidades que hacen que la solución sea difícil de obtener. Las inestabilidades serán enunciadas conforme se presenten en los problemas planteados, capítulos 6,7 y 8.
Para justificar la solución obtenida según el método de resolución aplicada, se pasa a describir brevemente los tres métodos de solución utilizados para resolver los problemas no lineales planteados. Estos tres métodos son: Newton-Raphson, Newton-Raphson añadiendo un factor de amortiguamiento ficticio (este método es llamado “automatic-stabilization” en ABAQUS y el método de Arc-length de Riks modificado. Los cuales serán explicados con las particularidades de su implementación en ABAQUS
Para una información más detallada de estos métodos implementados en ABAQUS consultar [1].
4.1 Newton-Raphson
El método de Newton-Raphson es uno de los más utilizados en programas de FEM para resolver ecuaciones no lineales. Y está ampliamente explicado en la literatura [1,5]. Además existen variantes de este método como son los procedimientos cuasi-Newton.
El método de Newton es relativamente fácil de visualizar en el caso de una dimensión, es decir cuando el vector de movimientos nodales, a, tiene una sóla componente. Las ecuaciones planteadas por el teorema de los trabajos virtuales, particularizada para el caso de los elementos finitos, se puede escribir de forma simbólica como:
int ext( )F a F (4.1)
Esta ecuación se puede visualizar como el movimiento que genera las fuerzas sobre el sistema deben de crear una fuerza interna igual a la fuerza externa aplicada.
La carga exterior se divide en incrementos, en ABAQUS el usuario puede fijar el valor de estos incrementos de carga o dejar que ABAQUS elija estos valores de forma optima utilizando un algoritmo [1]. En cualquier caso la fuerza exterior aplicada se descompone en una suma de incrementos:
extn n n
n n
F F F F 1 (4.2)
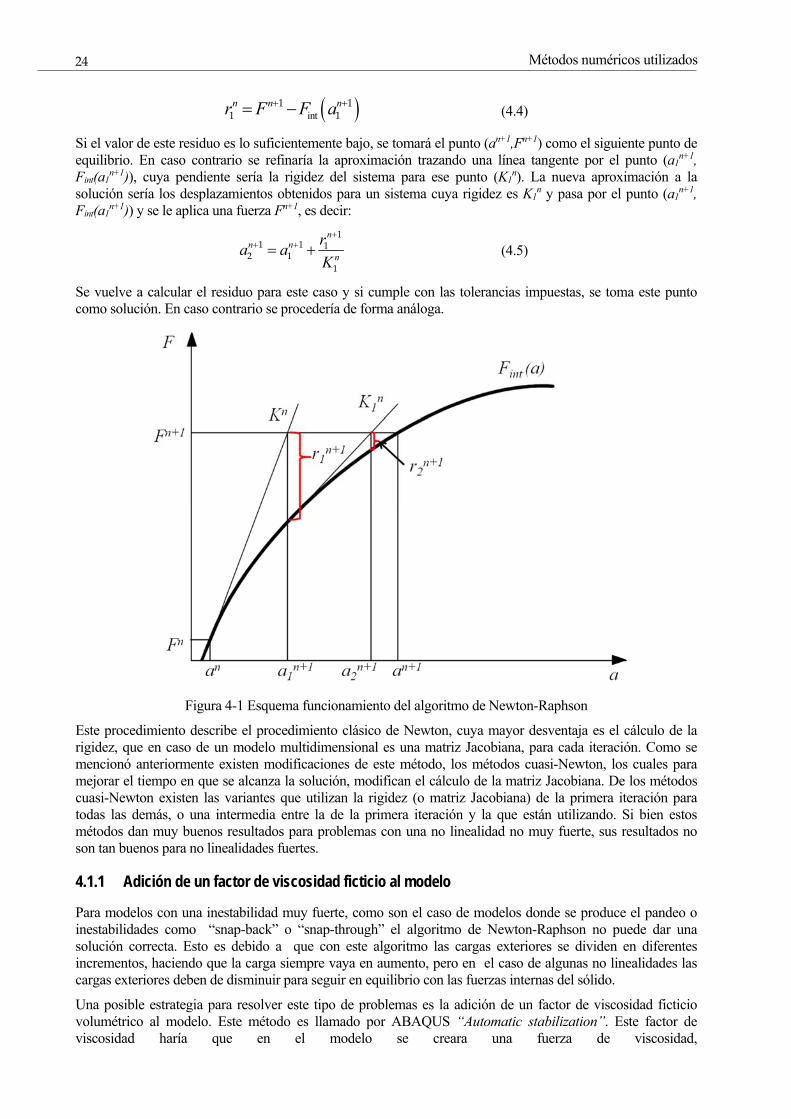
A continuación se explicará este método utilizando de apoyo la Figura 4-1 que representa la gráfica de Fuerza desplazamiento de un problema de una dimensión. Imaginemos que partimos de un punto de equilibrio, es decir que forma parte de la solución, (an,Fn). A partir de ese punto se traza una línea tangente a la curva, cuya pendiente será la rigidez en ese punto Kn. La aproximación al siguiente punto de equilibrio será los desplazamientos obtenidos al aplicar una fuerza Fn+1 a un sistema que pasa por el punto (an,Fn) y que tiene rigidez Kn, es decir:
n n
n nn
F Fa a
K
11
1 (4.3)
El residuo se define como la diferencia entre el valor de la fuerza aplicada Fn+1 y el de la fuerza del sistema real Fint(an+1).
C
Métodos numéricos utilizados
24
intn n nr F F a 1 11 1 (4.4)
Si el valor de este residuo es lo suficientemente bajo, se tomará el punto (an+1,Fn+1) como el siguiente punto de equilibrio. En caso contrario se refinaría la aproximación trazando una línea tangente por el punto (a1
n+1, Fint(a1
n+1)), cuya pendiente sería la rigidez del sistema para ese punto (K1n). La nueva aproximación a la
solución sería los desplazamientos obtenidos para un sistema cuya rigidez es K1n y pasa por el punto (a1
n+1, Fint(a1
n+1)) y se le aplica una fuerza Fn+1, es decir:
n
n nn
ra a
K
11 1 1
2 1
1
(4.5)
Se vuelve a calcular el residuo para este caso y si cumple con las tolerancias impuestas, se toma este punto como solución. En caso contrario se procedería de forma análoga.
Figura 4-1 Esquema funcionamiento del algoritmo de Newton-Raphson
Este procedimiento describe el procedimiento clásico de Newton, cuya mayor desventaja es el cálculo de la rigidez, que en caso de un modelo multidimensional es una matriz Jacobiana, para cada iteración. Como se mencionó anteriormente existen modificaciones de este método, los métodos cuasi-Newton, los cuales para mejorar el tiempo en que se alcanza la solución, modifican el cálculo de la matriz Jacobiana. De los métodos cuasi-Newton existen las variantes que utilizan la rigidez (o matriz Jacobiana) de la primera iteración para todas las demás, o una intermedia entre la de la primera iteración y la que están utilizando. Si bien estos métodos dan muy buenos resultados para problemas con una no linealidad no muy fuerte, sus resultados no son tan buenos para no linealidades fuertes.
4.1.1 Adición de un factor de viscosidad ficticio al modelo
Para modelos con una inestabilidad muy fuerte, como son el caso de modelos donde se produce el pandeo o inestabilidades como “snap-back” o “snap-through” el algoritmo de Newton-Raphson no puede dar una solución correcta. Esto es debido a que con este algoritmo las cargas exteriores se dividen en diferentes incrementos, haciendo que la carga siempre vaya en aumento, pero en el caso de algunas no linealidades las cargas exteriores deben de disminuir para seguir en equilibrio con las fuerzas internas del sólido.
Una posible estrategia para resolver este tipo de problemas es la adición de un factor de viscosidad ficticio volumétrico al modelo. Este método es llamado por ABAQUS “Automatic stabilization”. Este factor de viscosidad haría que en el modelo se creara una fuerza de viscosidad,
25
¡Error! No se encuentra el origen de la referencia., que se añadiría a la ecuación de equilibrio ¡Error! No se encuentra el origen de la referencia..
*
vF cM v (4.6)
ext int
vF F F 0 (4.7)
Donde c es el coeficiente de amortiguamiento, M* es una matriz de masas artificial calculada a partir de aplicar una densidad unidad al modelo, v=∆u/∆t es el vector de velocidades nodales. En la ecuación de equilibrio Fext representa las cargas externas aplicadas al modelo, Fint a las fuerzas interna del modelo y Fv a la fuerza debido a la viscosidad ficticia.
Respecto a las unidades del factor de amortiguamiento, si se realiza un análisis dimensional a la ecuación (4.6) y a través de la información aportada por ABAQUS [1], se llega a la conclusión de que la unidad de este coeficiente es de 1/(tiempo), es decir 1/s. Los modelos que se presentarán más adelante en este proyecto, son modelos estáticos, por lo que las unidades del resto del modelo no afectarán al valor de este coeficiente.
Mientras el modelo es estable, las fuerzas de viscosidad son despreciables. Pero en el momento en el que se produzca un incremento de desplazamientos muy grande (un incremento en v) si aparece la fuerza de viscosidad son importantes, e intentan estabilizar el modelo.
La elección de este factor de viscosidad se puede realizar mediante prueba y error, o diciendo a ABAQUS que porcentaje total de la energía del modelo se permite disipar debido a la inclusión de la fuerza de amortiguamiento.
4.2 Arc-length
El método de “Arc-length” permite obtener la solución a problemas no lineales estáticos, incluso en los casos en los que el comportamiento exhiba inestabilidades como las del tipo snap-back, snap-through, pandeo o colapso de alguna parte del modelo. En estos casos la curva fuerza desplazamiento presenta zona de pendiente negativa, es decir de rigidez negativa, y el sólido debe de liberar energía para alcanzar el equilibrio. La filosofía de este método es hacer que tanto los grados de libertad del sólido como las cargas aplicadas sean variables. Esto se consigue haciendo todas las cargas exteriores proporcionales a un factor λ, por lo que el número de variables que definen la solución del problema en este método son los n grados de libertad más el factor proporcional es decir n+1 variables.
Existen varios procedimientos de Arc-length, como son el de Riks [33], Ramm [32] y Criesfiel. El primero de ellos cronológicamente hablando fue el Riks y una modificación de este método es el que está implementado en ABAQUS.
En esta sección describiremos brevemente el método modificado de Riks que utilizaremos en ABAQUS y al final de la misma se comentará las diferencias existentes entre este método y el de Ramm.
4.2.1 Método de Riks modificado
Cómo se comento en la introducción de esta sección, utilizando este método tantos los grados de libertad del problema en cada instante de tiempo como las cargas a las que es sometido el sólido son variables. Este método supone que la evolución de las variables es suficientemente suave, o dicho de otro modo, que en ningún momento se produce ninguna bifurcación ni pico en la evolución de las variables.
Antes de entrar un poco más en detalle se enunciará brevemente el significado geométrico del mismo. En la Figura 4-2, se muestra un esquema de un problema de una dimensión que se utilizará a modo de ejemplo. El método se puede dividir en dos fases, la fase predictiva y la fase correctora. Durante la primera fase, la fase predictiva, se determinará el tamaño de la longitud de arco en cada incremento, este se consigue trazando una tangente a la curva en el punto de equilibrio donde nos encontramos, dando un incremento al factor de carga llegando al punto A1. Una vez alcanza comienza la fase correctora, que en este método consiste en buscar la solución de equilibrio en una línea perpendicular a la trazada en la fase correctora.

Métodos numéricos utilizados
26
Figura 4-2 Esquema del método de Riks modificado.
Para entrar un poco más en detalle de cómo está implementado este método en ABAQUS se explicará como actuaría el método en el caso de un problema como el mostrado en la Figura 4-2. En primer lugar definiremos las variables de un problema con n grados de libertad:
con cargas de referencia en cada grado de libertad del modelo 1,2,3... NP N n
Desplazamiento nodal : con 1, 2,3... Nu N n
Factor proporcional de la carga λ. Es decir que la carga que actúa en el modelo en cualquier instante
será NP Las variables serán escaladas para que todas ellas sean de una magnitud comparable. ABAQUS realiza esto
midiendo el desplazamiento máximo en la iteración inicial del incremento u , también se definirá N NP P P . Por lo que el escalado de las variables será:
En cargas: ,N N NP P P P
En desplazamientos: N Nu u u
Por lo que una vez escalado el problema, la solución se puede obtener a partir de las variables λ y N
u , siendo todas las variables del orden unidad. Para un mejor entendimiento a partir de este momento supondremos que tratamos un problema con un grado de libertad.
Una vez definidas las variables y escaladas, se pasa a realizar la fase predictiva. Partiendo de un punto de
equilibrio 00 0,N
A u , se calcula la recta tangente a la curva en ese punto, siendo su pendiente la rigidez
del sólido en ese punto M
0NK . Ahora pasamos a calcular los desplazamientos que tendría un sistema con la
rigidez M
0NK aplicando la carga de referencia:
0 0N M M NK v P (4.8)
El incremento de A0 a A1 es elegido a partir del incremento de la longitud de arco ∆l

27
20 00 0 2
0
,1 ,1
1
N N
N
lv v l
v
(4.9)
Donde 00
NN v
vu
. En la primera iteración del primer incremento, ∆l es impuesto por el usuario. En las demás
iteraciones este incremento será elegido por el algoritmo de incremento de carga automático de ABAQUS/Standard. El signo de ∆λ0 es elegido tal que el producto ecuación (4.10) sea positivo:
0 10 1,1 , 0N N
v u (4.10)
Una vez realizado esto pasamos a la fase correctora, en el cual se buscará la solución en dirección
perpendicular a 0 ,1N
v a partir del punto A1. Esto se consigue aplicando el algoritmo de Newton-Raphson y
forzando que la solución se encuentre en la línea perpendicular antes mencionada.
Antes de describir como se implementa la fase correctora en ABAQUS, vamos a describir como se realiza la búsqueda de la solución en esta etapa ayudándonos de la Figura 4-2. En primer lugar partiendo del punto A1 se traza una línea vertical y a partir del punto intersección entre esta línea vertical y la curva solución. A partir de este punto se traza una línea tangente a la curva y se halla la intersección de esta línea a la línea perpendicular que parte de A1, siendo este punto de intersección el punto A2. Se verifica si A2 entra dentro de los márgenes para que sea solución (cumple con las tolerancias impuestas), si no entra se busca el siguiente punto A3, de forma análoga a la forma en la que se ha buscado A2.
A continuación se pasa a describir el algoritmo implementado en ABAQUS:
Inicialización: , N Ni iu v 0 0 0
For i=1,2,3…
a. Se calcula las fuerzas nodales IN, y la matriz de rigidez KNM en el punto ,N Niu u 0 0 1 es
decir en el punto Ai.
b. Comprobación del equilibrio:
N N Ni iR P I 0 (4.11)
Si el residuo NiR es lo suficientemente pequeño se ha alcanzado el equilibrio, con lo que se habría
llegado a la solución para este incremento. En caso contrario se procede con el paso c.
c. Resolver:
; ;NM M M N Ni i iK v c P R (4.12)
Es decir resolvemos simultáneamente dos desplazamientos v y c y dos cargas P, R
d. Escalamos los desplazamiento obtenidos en el paso c
, N NN Ni ii iv v u c c u % % (4.13)
De esta forma tenemos los vectores ,Niv 1% y ,
Ni ic % donde:
Métodos numéricos utilizados
28
°Proyección vertical del residuo en N N
Ni
i
R PP
P
2 (4.14)
Por lo que si al vector ,Ni ic % le sumamos el vector ,
Niv 1% , nos moveremos perpendicularmente
a la recta 0 ,1N
v , desde Ai a Ai+1. Esto da la siguiente ecuación:
, , , ,N N
N N N ii ii i N N
i
c vc v v
v v
00
0
0 1 1 01
% %% % %g
% % (4.15)
Por lo que el nuevo punto solución es ahora:
,i N N N Ni i c iA u u c v 1
0 0 (4.16)
e. Actualización para la siguiente iteración:
N N N Ni i i i
i i
u u c v
i i
1
1
1
(4.17)
End
4.2.2 Comparación con el método de Ramm
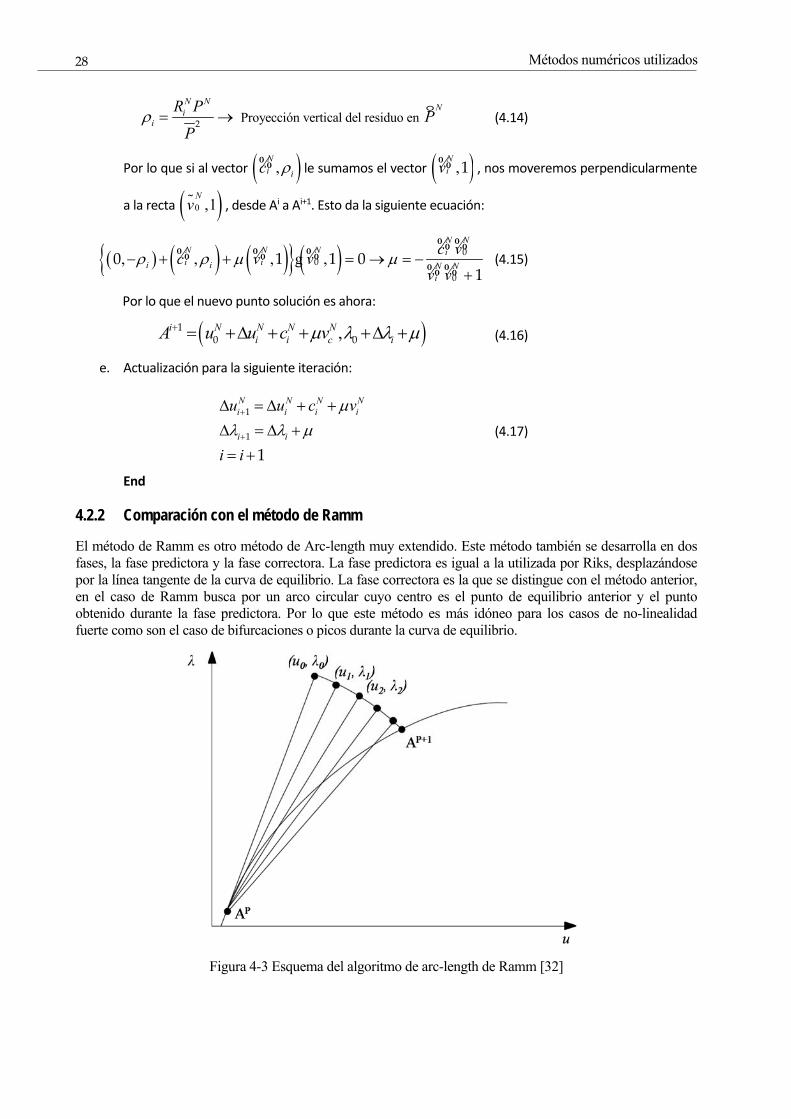
El método de Ramm es otro método de Arc-length muy extendido. Este método también se desarrolla en dos fases, la fase predictora y la fase correctora. La fase predictora es igual a la utilizada por Riks, desplazándose por la línea tangente de la curva de equilibrio. La fase correctora es la que se distingue con el método anterior, en el caso de Ramm busca por un arco circular cuyo centro es el punto de equilibrio anterior y el punto obtenido durante la fase predictora. Por lo que este método es más idóneo para los casos de no-linealidad fuerte como son el caso de bifurcaciones o picos durante la curva de equilibrio.
Figura 4-3 Esquema del algoritmo de arc-length de Ramm [32]
29
5 MODELO DEL ENSAYO DE TENACIDAD INTERLAMINAR EN MATERIALES COMPUESTOS
n este capítulo modelaremos el ensayo que se utiliza en los materiales compuestos para medir la tenacidad a fractura interlaminar, GIc, utilizando el modelo de LEBIM introducido en el capítulo 2. Además los resultados obtenidos en este proyecto se compararan con resultados experimentales y otros
obtenidos anteriormente con el mismo modelo de interfase (LEBIM) pero resolviéndolo con BEM.
5.1 Descripción de la probeta del ensayo
En la industria aeronáutica, los procedimientos para medir la tenacidad a fractura interlaminar en uniones están estandarizados en [2, 16].
La probeta utilizada es una “Double Cantilever Beam”, la cual está compuesta por dos laminados unidos por una capa de adhesivo, Figura 5-1. La carga se aplicará a través de unas mordazas, estando el punto de aplicación de la carga a 13 mm del extremo de la probeta. Este ensayo se realizará con un control en desplazamientos. Las dimensiones de la probeta se muestran en la Figura 5-1 (a).
Figura 5-1 (a) Esquema de la probeta DCB, (b) probeta con las mardozas para el ensayo, (c) configuración del ensayo [36]
Es importante tener en cuenta que en el adhesivo EA 9695 K.05 utiliza una malla de poliéster soporte
E
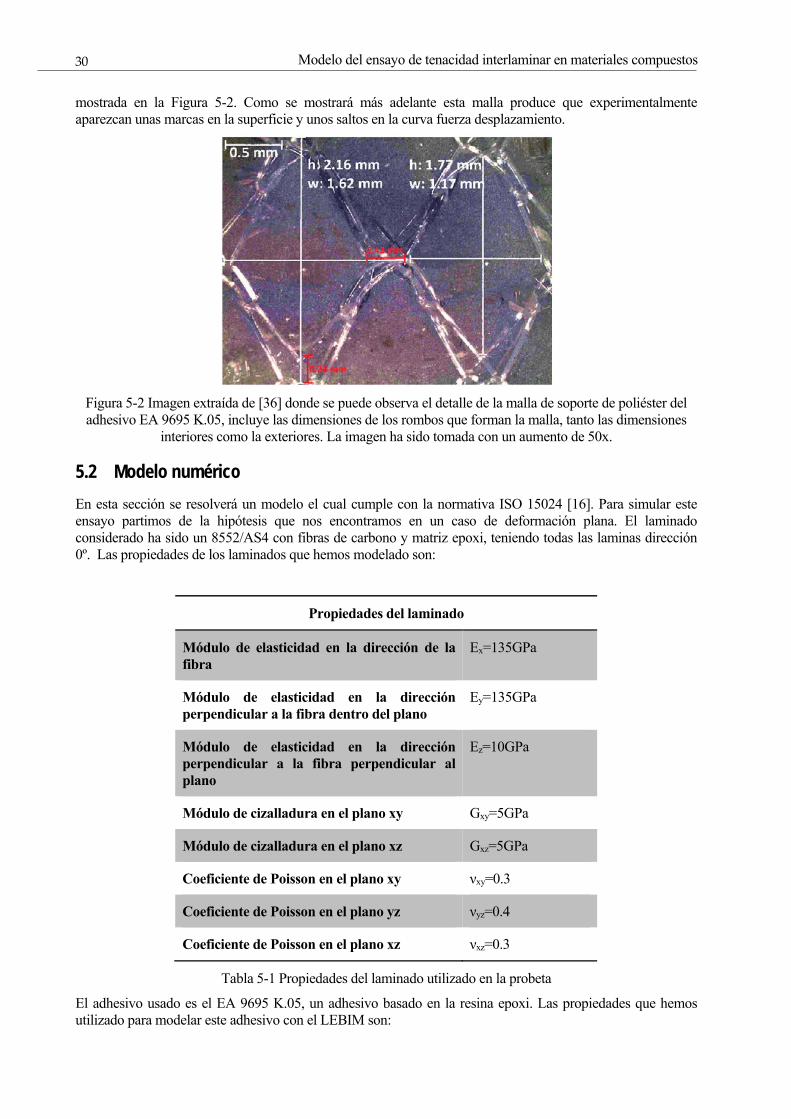
Modelo del ensayo de tenacidad interlaminar en materiales compuestos
30
mostrada en la Figura 5-2. Como se mostrará más adelante esta malla produce que experimentalmente aparezcan unas marcas en la superficie y unos saltos en la curva fuerza desplazamiento.
Figura 5-2 Imagen extraída de [36] donde se puede observa el detalle de la malla de soporte de poliéster del adhesivo EA 9695 K.05, incluye las dimensiones de los rombos que forman la malla, tanto las dimensiones
interiores como la exteriores. La imagen ha sido tomada con un aumento de 50x.
5.2 Modelo numérico
En esta sección se resolverá un modelo el cual cumple con la normativa ISO 15024 [16]. Para simular este ensayo partimos de la hipótesis que nos encontramos en un caso de deformación plana. El laminado considerado ha sido un 8552/AS4 con fibras de carbono y matriz epoxi, teniendo todas las laminas dirección 0º. Las propiedades de los laminados que hemos modelado son:
Propiedades del laminado
Módulo de elasticidad en la dirección de la fibra
Ex=135GPa
Módulo de elasticidad en la dirección perpendicular a la fibra dentro del plano
Ey=135GPa
Módulo de elasticidad en la dirección perpendicular a la fibra perpendicular al plano
Ez=10GPa
Módulo de cizalladura en el plano xy Gxy=5GPa
Módulo de cizalladura en el plano xz Gxz=5GPa
Coeficiente de Poisson en el plano xy νxy=0.3
Coeficiente de Poisson en el plano yz νyz=0.4
Coeficiente de Poisson en el plano xz νxz=0.3
Tabla 5-1 Propiedades del laminado utilizado en la probeta
El adhesivo usado es el EA 9695 K.05, un adhesivo basado en la resina epoxi. Las propiedades que hemos utilizado para modelar este adhesivo con el LEBIM son:
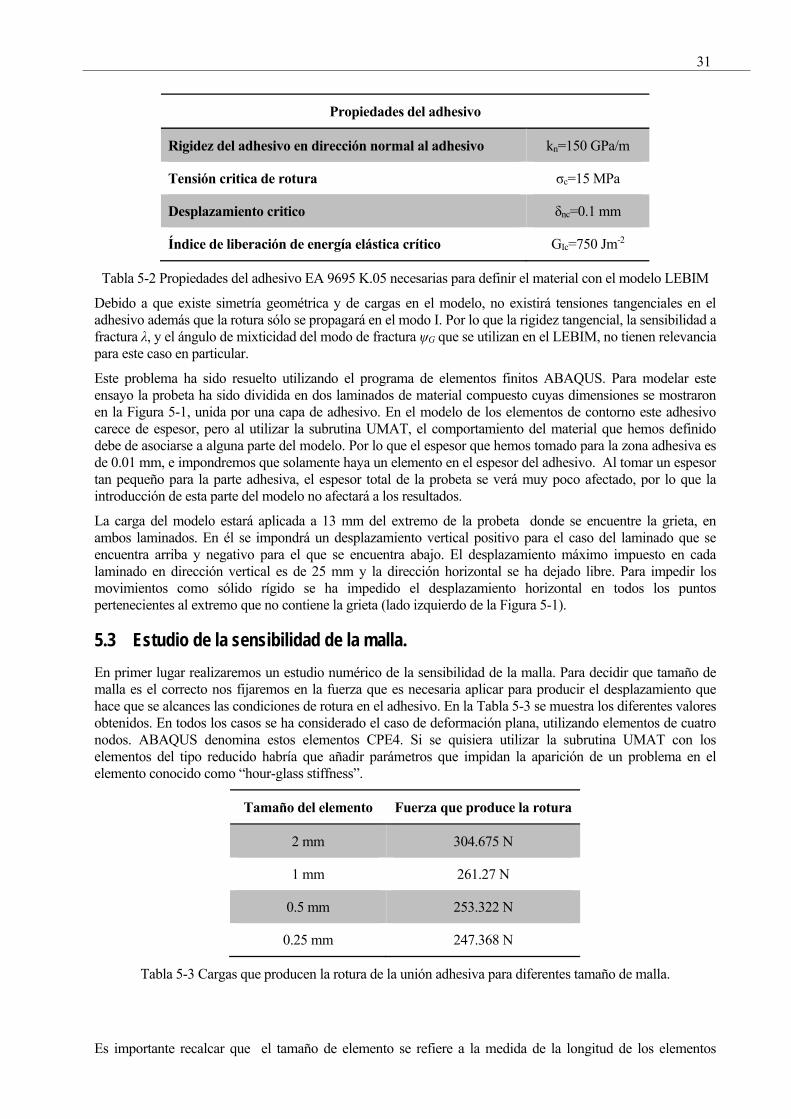
31
Propiedades del adhesivo
Rigidez del adhesivo en dirección normal al adhesivo kn=150 GPa/m
Tensión critica de rotura σc=15 MPa
Desplazamiento critico δnc=0.1 mm
Índice de liberación de energía elástica crítico GIc=750 Jm-2
Tabla 5-2 Propiedades del adhesivo EA 9695 K.05 necesarias para definir el material con el modelo LEBIM
Debido a que existe simetría geométrica y de cargas en el modelo, no existirá tensiones tangenciales en el adhesivo además que la rotura sólo se propagará en el modo I. Por lo que la rigidez tangencial, la sensibilidad a fractura λ, y el ángulo de mixticidad del modo de fractura ψG que se utilizan en el LEBIM, no tienen relevancia para este caso en particular.
Este problema ha sido resuelto utilizando el programa de elementos finitos ABAQUS. Para modelar este ensayo la probeta ha sido dividida en dos laminados de material compuesto cuyas dimensiones se mostraron en la Figura 5-1, unida por una capa de adhesivo. En el modelo de los elementos de contorno este adhesivo carece de espesor, pero al utilizar la subrutina UMAT, el comportamiento del material que hemos definido debe de asociarse a alguna parte del modelo. Por lo que el espesor que hemos tomado para la zona adhesiva es de 0.01 mm, e impondremos que solamente haya un elemento en el espesor del adhesivo. Al tomar un espesor tan pequeño para la parte adhesiva, el espesor total de la probeta se verá muy poco afectado, por lo que la introducción de esta parte del modelo no afectará a los resultados.
La carga del modelo estará aplicada a 13 mm del extremo de la probeta donde se encuentre la grieta, en ambos laminados. En él se impondrá un desplazamiento vertical positivo para el caso del laminado que se encuentra arriba y negativo para el que se encuentra abajo. El desplazamiento máximo impuesto en cada laminado en dirección vertical es de 25 mm y la dirección horizontal se ha dejado libre. Para impedir los movimientos como sólido rígido se ha impedido el desplazamiento horizontal en todos los puntos pertenecientes al extremo que no contiene la grieta (lado izquierdo de la Figura 5-1).
5.3 Estudio de la sensibilidad de la malla.
En primer lugar realizaremos un estudio numérico de la sensibilidad de la malla. Para decidir que tamaño de malla es el correcto nos fijaremos en la fuerza que es necesaria aplicar para producir el desplazamiento que hace que se alcances las condiciones de rotura en el adhesivo. En la Tabla 5-3 se muestra los diferentes valores obtenidos. En todos los casos se ha considerado el caso de deformación plana, utilizando elementos de cuatro nodos. ABAQUS denomina estos elementos CPE4. Si se quisiera utilizar la subrutina UMAT con los elementos del tipo reducido habría que añadir parámetros que impidan la aparición de un problema en el elemento conocido como “hour-glass stiffness”.
Tamaño del elemento Fuerza que produce la rotura
2 mm 304.675 N
1 mm 261.27 N
0.5 mm 253.322 N
0.25 mm 247.368 N
Tabla 5-3 Cargas que producen la rotura de la unión adhesiva para diferentes tamaño de malla.
Es importante recalcar que el tamaño de elemento se refiere a la medida de la longitud de los elementos
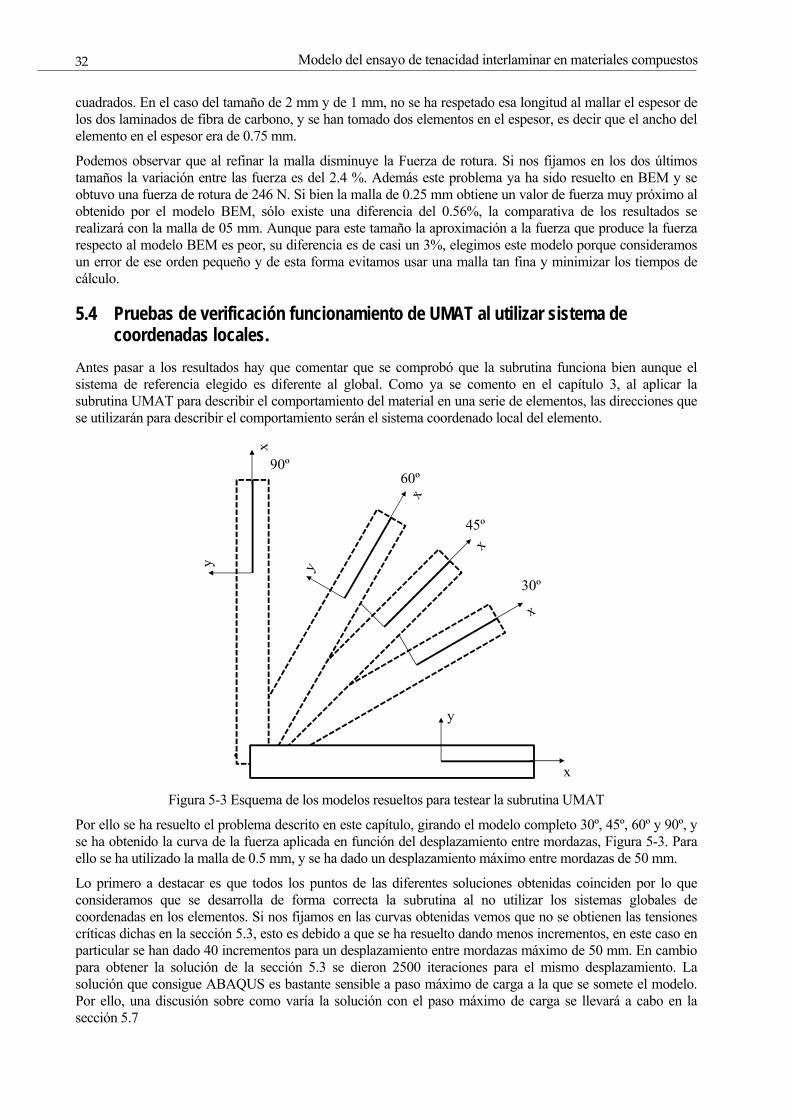
Modelo del ensayo de tenacidad interlaminar en materiales compuestos
32
cuadrados. En el caso del tamaño de 2 mm y de 1 mm, no se ha respetado esa longitud al mallar el espesor de los dos laminados de fibra de carbono, y se han tomado dos elementos en el espesor, es decir que el ancho del elemento en el espesor era de 0.75 mm.
Podemos observar que al refinar la malla disminuye la Fuerza de rotura. Si nos fijamos en los dos últimos tamaños la variación entre las fuerza es del 2.4 %. Además este problema ya ha sido resuelto en BEM y se obtuvo una fuerza de rotura de 246 N. Si bien la malla de 0.25 mm obtiene un valor de fuerza muy próximo al obtenido por el modelo BEM, sólo existe una diferencia del 0.56%, la comparativa de los resultados se realizará con la malla de 05 mm. Aunque para este tamaño la aproximación a la fuerza que produce la fuerza respecto al modelo BEM es peor, su diferencia es de casi un 3%, elegimos este modelo porque consideramos un error de ese orden pequeño y de esta forma evitamos usar una malla tan fina y minimizar los tiempos de cálculo.
5.4 Pruebas de verificación funcionamiento de UMAT al utilizar sistema de coordenadas locales.
Antes pasar a los resultados hay que comentar que se comprobó que la subrutina funciona bien aunque el sistema de referencia elegido es diferente al global. Como ya se comento en el capítulo 3, al aplicar la subrutina UMAT para describir el comportamiento del material en una serie de elementos, las direcciones que se utilizarán para describir el comportamiento serán el sistema coordenado local del elemento.
Figura 5-3 Esquema de los modelos resueltos para testear la subrutina UMAT
Por ello se ha resuelto el problema descrito en este capítulo, girando el modelo completo 30º, 45º, 60º y 90º, y se ha obtenido la curva de la fuerza aplicada en función del desplazamiento entre mordazas, Figura 5-3. Para ello se ha utilizado la malla de 0.5 mm, y se ha dado un desplazamiento máximo entre mordazas de 50 mm.
Lo primero a destacar es que todos los puntos de las diferentes soluciones obtenidas coinciden por lo que consideramos que se desarrolla de forma correcta la subrutina al no utilizar los sistemas globales de coordenadas en los elementos. Si nos fijamos en las curvas obtenidas vemos que no se obtienen las tensiones críticas dichas en la sección 5.3, esto es debido a que se ha resuelto dando menos incrementos, en este caso en particular se han dado 40 incrementos para un desplazamiento entre mordazas máximo de 50 mm. En cambio para obtener la solución de la sección 5.3 se dieron 2500 iteraciones para el mismo desplazamiento. La solución que consigue ABAQUS es bastante sensible a paso máximo de carga a la que se somete el modelo. Por ello, una discusión sobre como varía la solución con el paso máximo de carga se llevará a cabo en la sección 5.7
y
x
y
x
30º
45º
60º90º
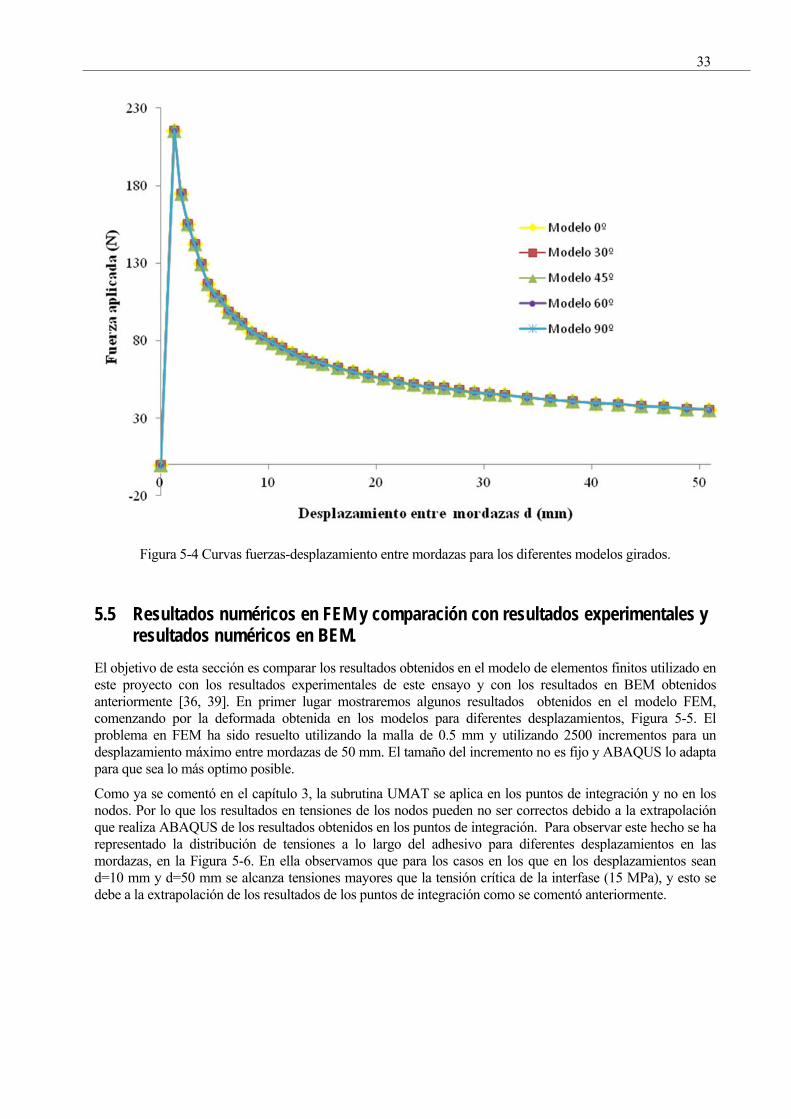
33
Figura 5-4 Curvas fuerzas-desplazamiento entre mordazas para los diferentes modelos girados.
5.5 Resultados numéricos en FEM y comparación con resultados experimentales y resultados numéricos en BEM.
El objetivo de esta sección es comparar los resultados obtenidos en el modelo de elementos finitos utilizado en este proyecto con los resultados experimentales de este ensayo y con los resultados en BEM obtenidos anteriormente [36, 39]. En primer lugar mostraremos algunos resultados obtenidos en el modelo FEM, comenzando por la deformada obtenida en los modelos para diferentes desplazamientos, Figura 5-5. El problema en FEM ha sido resuelto utilizando la malla de 0.5 mm y utilizando 2500 incrementos para un desplazamiento máximo entre mordazas de 50 mm. El tamaño del incremento no es fijo y ABAQUS lo adapta para que sea lo más optimo posible.
Como ya se comentó en el capítulo 3, la subrutina UMAT se aplica en los puntos de integración y no en los nodos. Por lo que los resultados en tensiones de los nodos pueden no ser correctos debido a la extrapolación que realiza ABAQUS de los resultados obtenidos en los puntos de integración. Para observar este hecho se ha representado la distribución de tensiones a lo largo del adhesivo para diferentes desplazamientos en las mordazas, en la Figura 5-6. En ella observamos que para los casos en los que en los desplazamientos sean d=10 mm y d=50 mm se alcanza tensiones mayores que la tensión crítica de la interfase (15 MPa), y esto se debe a la extrapolación de los resultados de los puntos de integración como se comentó anteriormente.
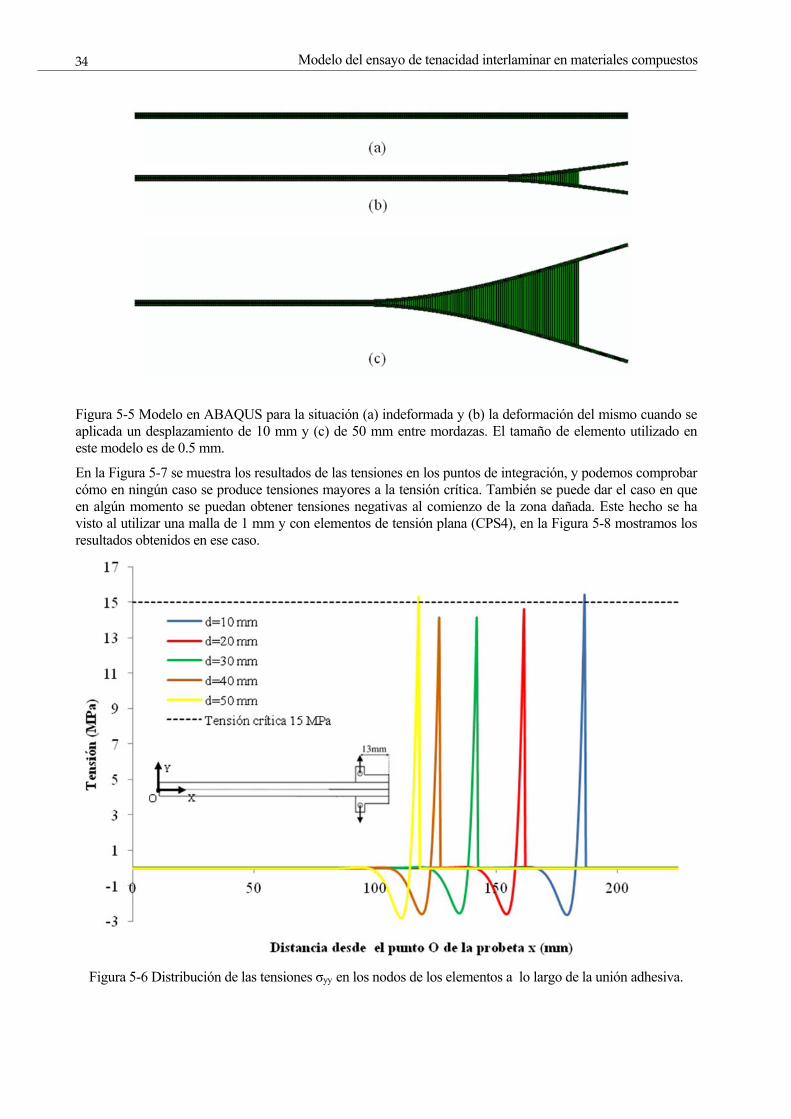
Modelo del ensayo de tenacidad interlaminar en materiales compuestos
34
Figura 5-5 Modelo en ABAQUS para la situación (a) indeformada y (b) la deformación del mismo cuando se aplicada un desplazamiento de 10 mm y (c) de 50 mm entre mordazas. El tamaño de elemento utilizado en este modelo es de 0.5 mm.
En la Figura 5-7 se muestra los resultados de las tensiones en los puntos de integración, y podemos comprobar cómo en ningún caso se produce tensiones mayores a la tensión crítica. También se puede dar el caso en que en algún momento se puedan obtener tensiones negativas al comienzo de la zona dañada. Este hecho se ha visto al utilizar una malla de 1 mm y con elementos de tensión plana (CPS4), en la Figura 5-8 mostramos los resultados obtenidos en ese caso.
Figura 5-6 Distribución de las tensiones σyy en los nodos de los elementos a lo largo de la unión adhesiva.
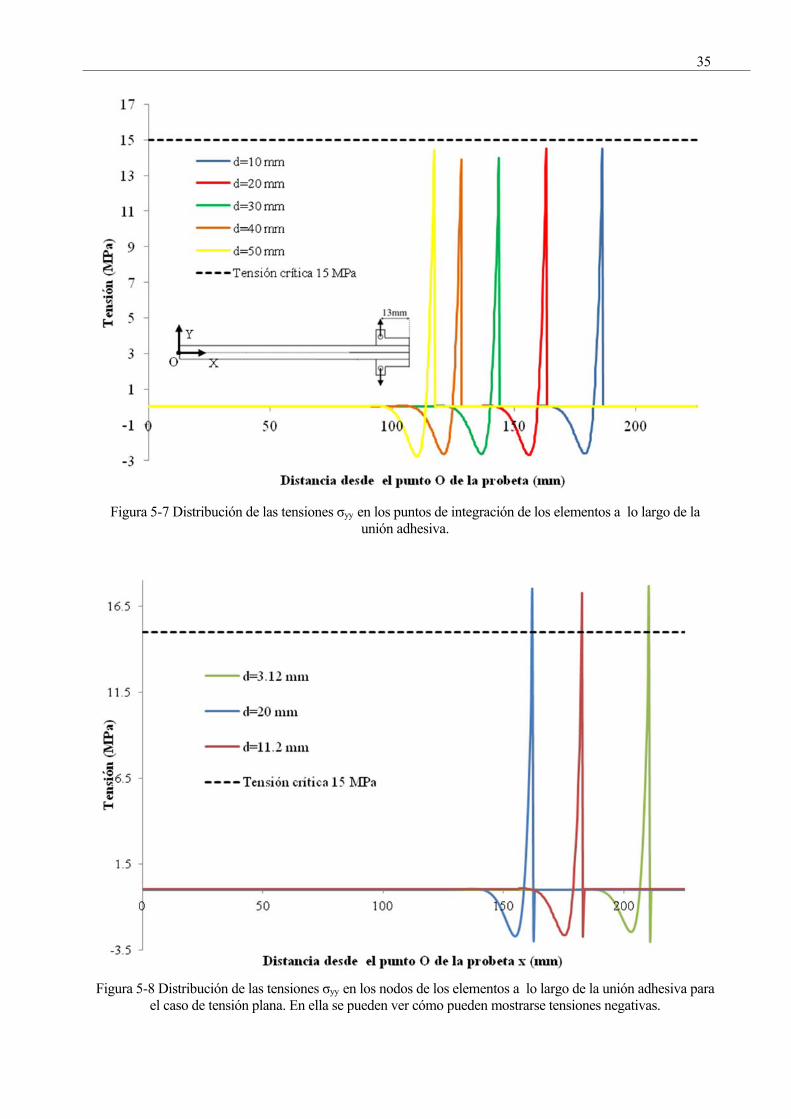
35
Figura 5-7 Distribución de las tensiones σyy en los puntos de integración de los elementos a lo largo de la unión adhesiva.
Figura 5-8 Distribución de las tensiones σyy en los nodos de los elementos a lo largo de la unión adhesiva para el caso de tensión plana. En ella se pueden ver cómo pueden mostrarse tensiones negativas.
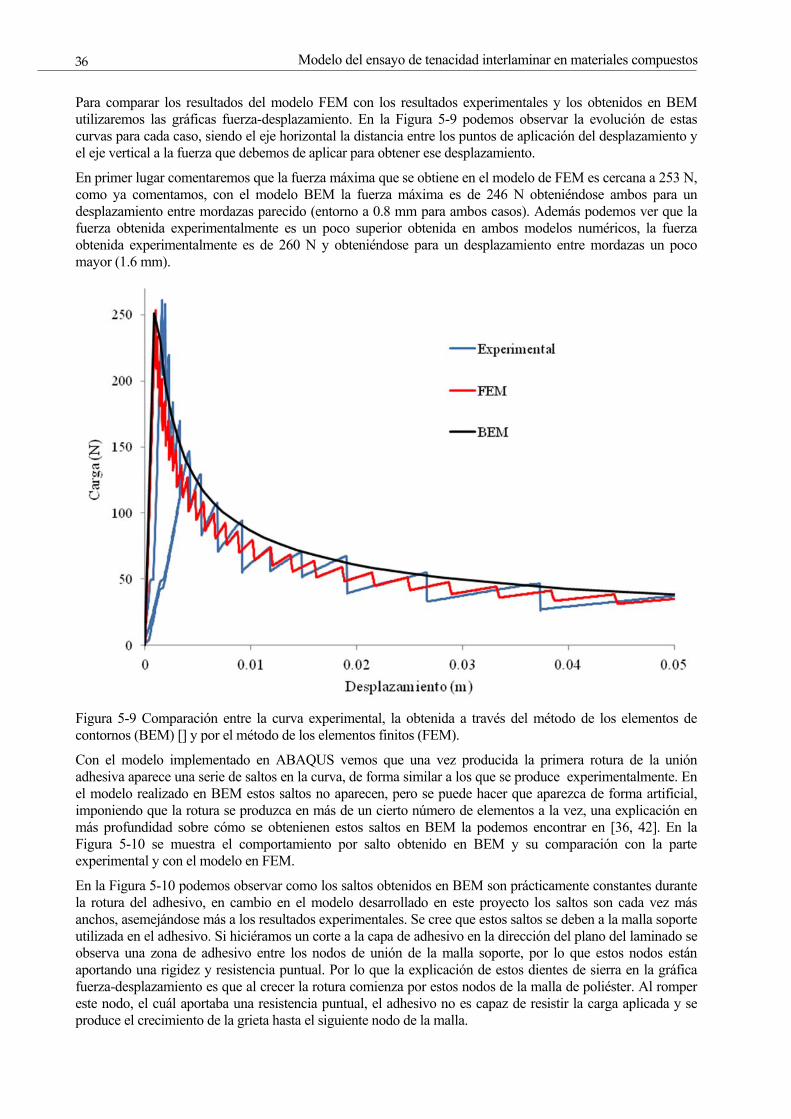
Modelo del ensayo de tenacidad interlaminar en materiales compuestos
36
Para comparar los resultados del modelo FEM con los resultados experimentales y los obtenidos en BEM utilizaremos las gráficas fuerza-desplazamiento. En la Figura 5-9 podemos observar la evolución de estas curvas para cada caso, siendo el eje horizontal la distancia entre los puntos de aplicación del desplazamiento y el eje vertical a la fuerza que debemos de aplicar para obtener ese desplazamiento.
En primer lugar comentaremos que la fuerza máxima que se obtiene en el modelo de FEM es cercana a 253 N, como ya comentamos, con el modelo BEM la fuerza máxima es de 246 N obteniéndose ambos para un desplazamiento entre mordazas parecido (entorno a 0.8 mm para ambos casos). Además podemos ver que la fuerza obtenida experimentalmente es un poco superior obtenida en ambos modelos numéricos, la fuerza obtenida experimentalmente es de 260 N y obteniéndose para un desplazamiento entre mordazas un poco mayor (1.6 mm).
Figura 5-9 Comparación entre la curva experimental, la obtenida a través del método de los elementos de contornos (BEM) [] y por el método de los elementos finitos (FEM).
Con el modelo implementado en ABAQUS vemos que una vez producida la primera rotura de la unión adhesiva aparece una serie de saltos en la curva, de forma similar a los que se produce experimentalmente. En el modelo realizado en BEM estos saltos no aparecen, pero se puede hacer que aparezca de forma artificial, imponiendo que la rotura se produzca en más de un cierto número de elementos a la vez, una explicación en más profundidad sobre cómo se obtenienen estos saltos en BEM la podemos encontrar en [36, 42]. En la Figura 5-10 se muestra el comportamiento por salto obtenido en BEM y su comparación con la parte experimental y con el modelo en FEM.
En la Figura 5-10 podemos observar como los saltos obtenidos en BEM son prácticamente constantes durante la rotura del adhesivo, en cambio en el modelo desarrollado en este proyecto los saltos son cada vez más anchos, asemejándose más a los resultados experimentales. Se cree que estos saltos se deben a la malla soporte utilizada en el adhesivo. Si hiciéramos un corte a la capa de adhesivo en la dirección del plano del laminado se observa una zona de adhesivo entre los nodos de unión de la malla soporte, por lo que estos nodos están aportando una rigidez y resistencia puntual. Por lo que la explicación de estos dientes de sierra en la gráfica fuerza-desplazamiento es que al crecer la rotura comienza por estos nodos de la malla de poliéster. Al romper este nodo, el cuál aportaba una resistencia puntual, el adhesivo no es capaz de resistir la carga aplicada y se produce el crecimiento de la grieta hasta el siguiente nodo de la malla.
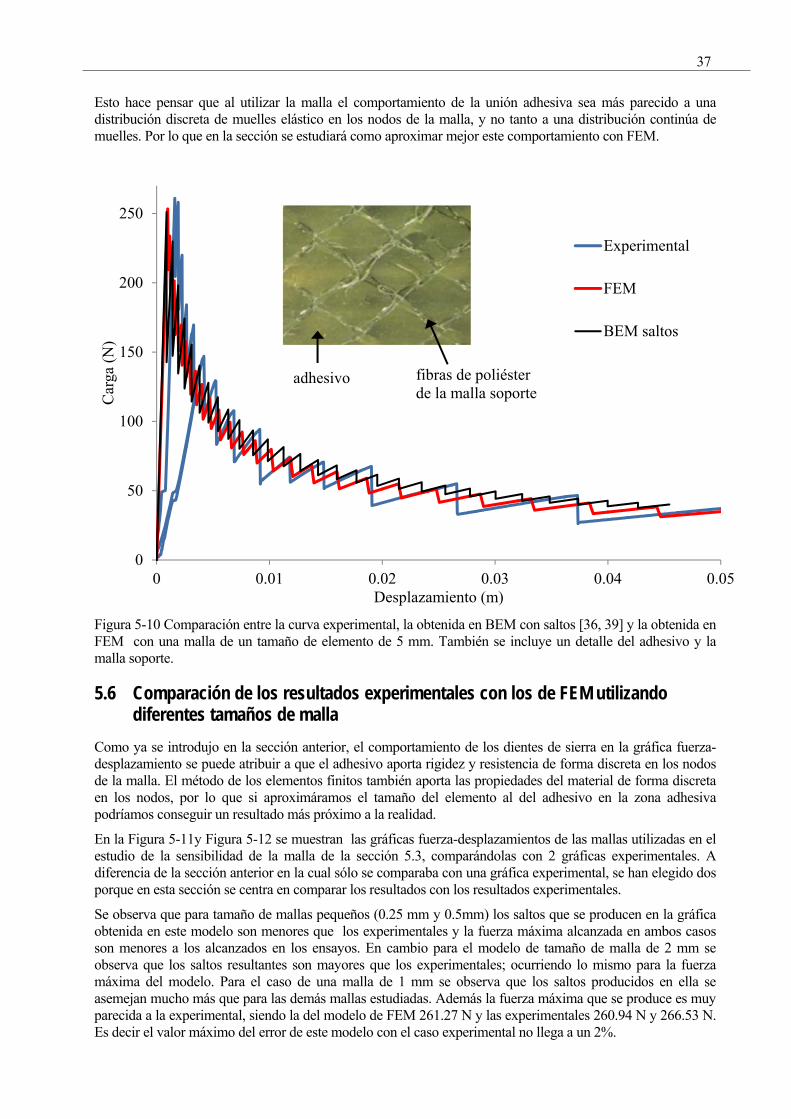
37
Esto hace pensar que al utilizar la malla el comportamiento de la unión adhesiva sea más parecido a una distribución discreta de muelles elástico en los nodos de la malla, y no tanto a una distribución continúa de muelles. Por lo que en la sección se estudiará como aproximar mejor este comportamiento con FEM.
Figura 5-10 Comparación entre la curva experimental, la obtenida en BEM con saltos [36, 39] y la obtenida en FEM con una malla de un tamaño de elemento de 5 mm. También se incluye un detalle del adhesivo y la malla soporte.
5.6 Comparación de los resultados experimentales con los de FEM utilizando diferentes tamaños de malla
Como ya se introdujo en la sección anterior, el comportamiento de los dientes de sierra en la gráfica fuerza-desplazamiento se puede atribuir a que el adhesivo aporta rigidez y resistencia de forma discreta en los nodos de la malla. El método de los elementos finitos también aporta las propiedades del material de forma discreta en los nodos, por lo que si aproximáramos el tamaño del elemento al del adhesivo en la zona adhesiva podríamos conseguir un resultado más próximo a la realidad.
En la Figura 5-11y Figura 5-12 se muestran las gráficas fuerza-desplazamientos de las mallas utilizadas en el estudio de la sensibilidad de la malla de la sección 5.3, comparándolas con 2 gráficas experimentales. A diferencia de la sección anterior en la cual sólo se comparaba con una gráfica experimental, se han elegido dos porque en esta sección se centra en comparar los resultados con los resultados experimentales.
Se observa que para tamaño de mallas pequeños (0.25 mm y 0.5mm) los saltos que se producen en la gráfica obtenida en este modelo son menores que los experimentales y la fuerza máxima alcanzada en ambos casos son menores a los alcanzados en los ensayos. En cambio para el modelo de tamaño de malla de 2 mm se observa que los saltos resultantes son mayores que los experimentales; ocurriendo lo mismo para la fuerza máxima del modelo. Para el caso de una malla de 1 mm se observa que los saltos producidos en ella se asemejan mucho más que para las demás mallas estudiadas. Además la fuerza máxima que se produce es muy parecida a la experimental, siendo la del modelo de FEM 261.27 N y las experimentales 260.94 N y 266.53 N. Es decir el valor máximo del error de este modelo con el caso experimental no llega a un 2%.
0
50
100
150
200
250
0 0.01 0.02 0.03 0.04 0.05
Car
ga (
N)
Desplazamiento (m)
Experimental
FEM
BEM saltos
adhesivo fibras de poliéster de la malla soporte
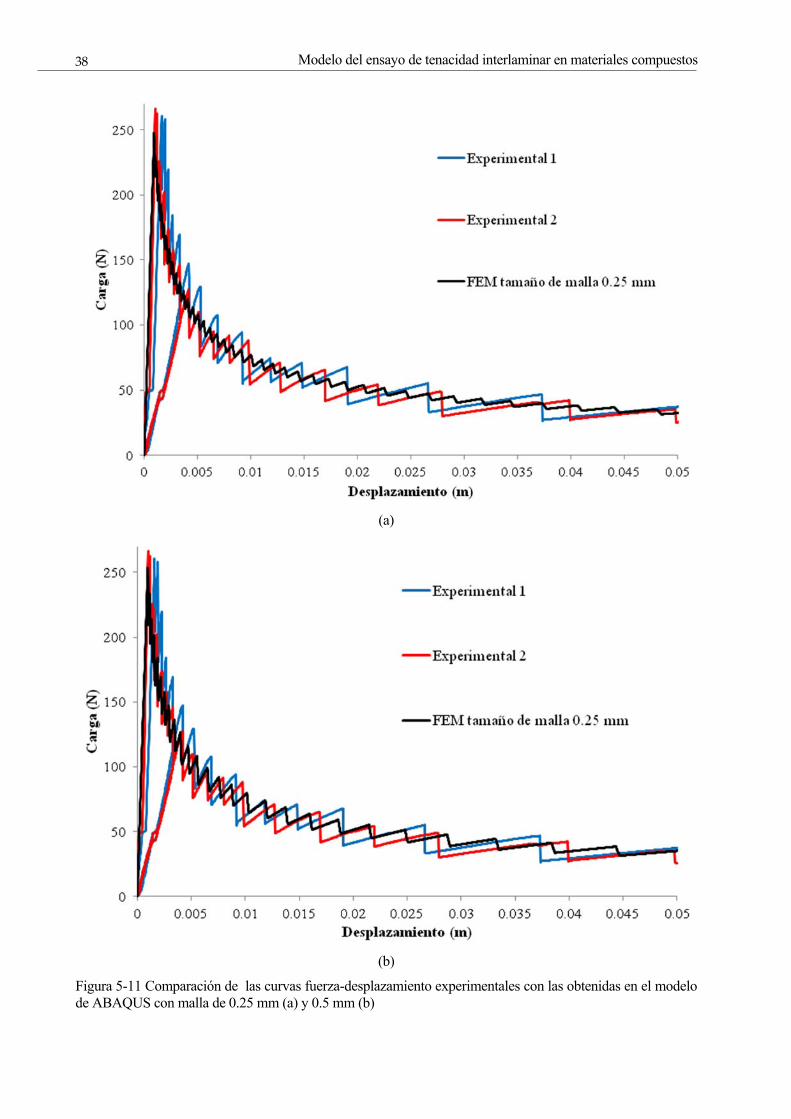
Modelo del ensayo de tenacidad interlaminar en materiales compuestos
38
(a)
(b)
Figura 5-11 Comparación de las curvas fuerza-desplazamiento experimentales con las obtenidas en el modelo de ABAQUS con malla de 0.25 mm (a) y 0.5 mm (b)
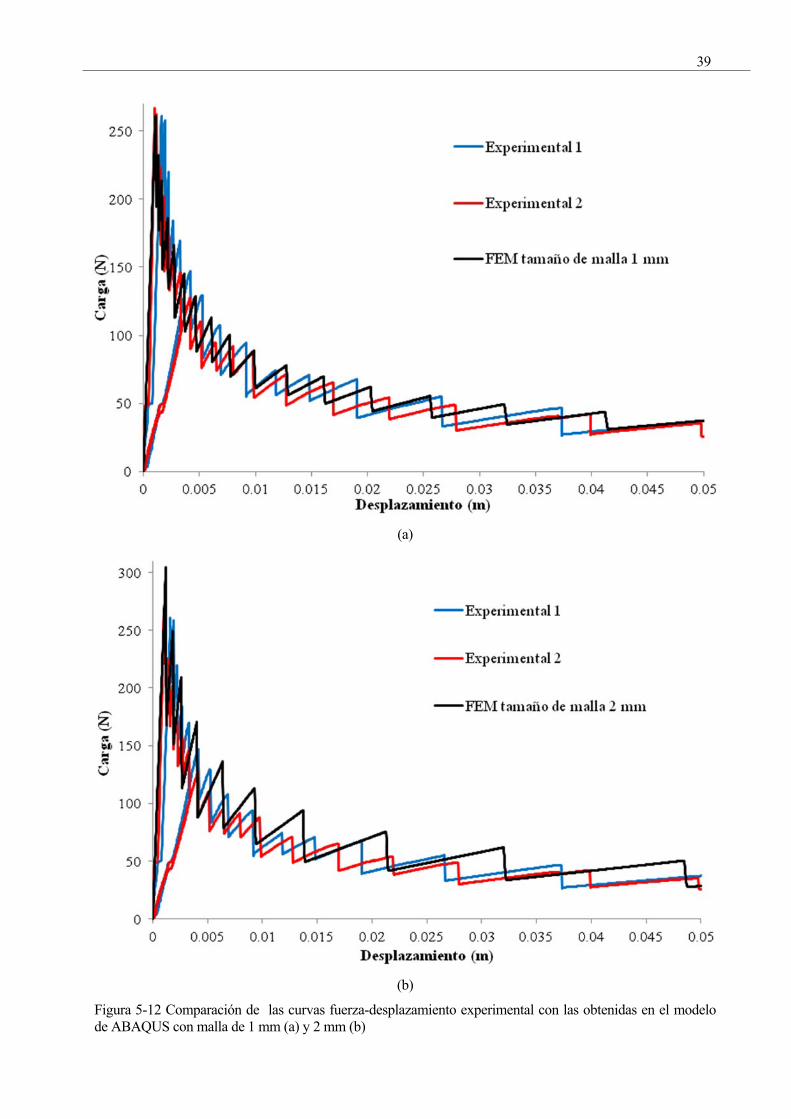
39
(a)
(b)
Figura 5-12 Comparación de las curvas fuerza-desplazamiento experimental con las obtenidas en el modelo de ABAQUS con malla de 1 mm (a) y 2 mm (b)
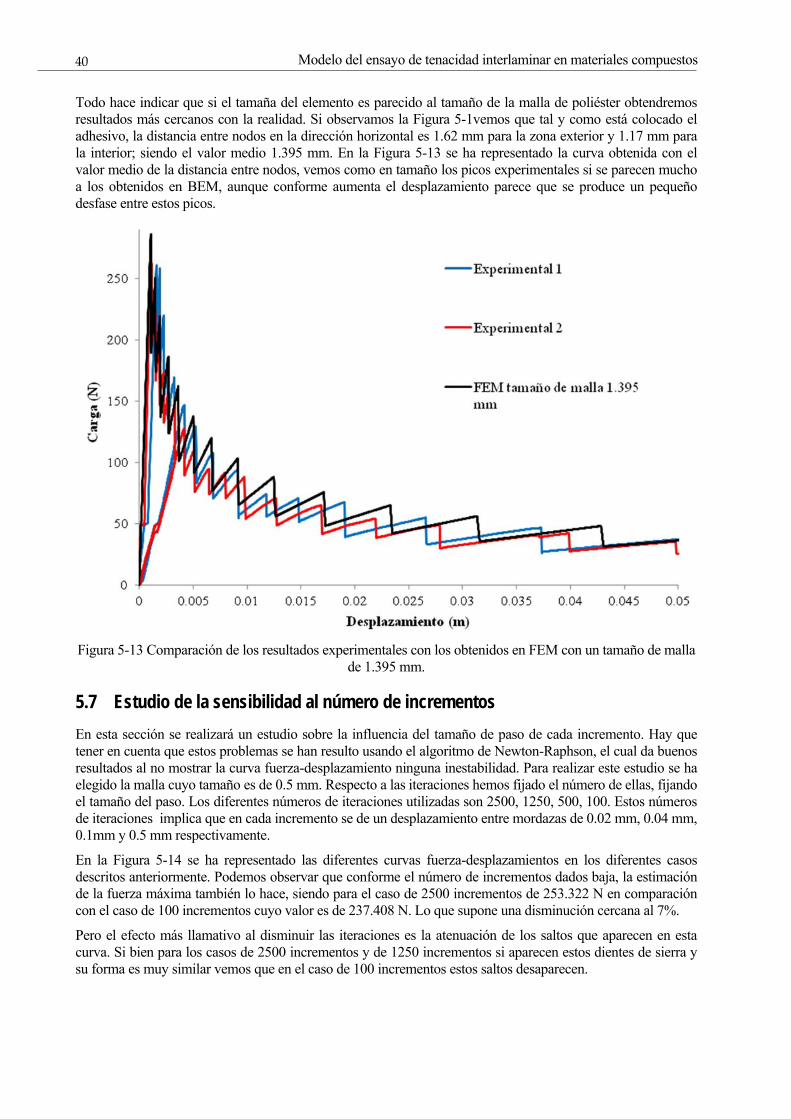
Modelo del ensayo de tenacidad interlaminar en materiales compuestos
40
Todo hace indicar que si el tamaña del elemento es parecido al tamaño de la malla de poliéster obtendremos resultados más cercanos con la realidad. Si observamos la Figura 5-1vemos que tal y como está colocado el adhesivo, la distancia entre nodos en la dirección horizontal es 1.62 mm para la zona exterior y 1.17 mm para la interior; siendo el valor medio 1.395 mm. En la Figura 5-13 se ha representado la curva obtenida con el valor medio de la distancia entre nodos, vemos como en tamaño los picos experimentales si se parecen mucho a los obtenidos en BEM, aunque conforme aumenta el desplazamiento parece que se produce un pequeño desfase entre estos picos.
Figura 5-13 Comparación de los resultados experimentales con los obtenidos en FEM con un tamaño de malla de 1.395 mm.
5.7 Estudio de la sensibilidad al número de incrementos
En esta sección se realizará un estudio sobre la influencia del tamaño de paso de cada incremento. Hay que tener en cuenta que estos problemas se han resulto usando el algoritmo de Newton-Raphson, el cual da buenos resultados al no mostrar la curva fuerza-desplazamiento ninguna inestabilidad. Para realizar este estudio se ha elegido la malla cuyo tamaño es de 0.5 mm. Respecto a las iteraciones hemos fijado el número de ellas, fijando el tamaño del paso. Los diferentes números de iteraciones utilizadas son 2500, 1250, 500, 100. Estos números de iteraciones implica que en cada incremento se de un desplazamiento entre mordazas de 0.02 mm, 0.04 mm, 0.1mm y 0.5 mm respectivamente.
En la Figura 5-14 se ha representado las diferentes curvas fuerza-desplazamientos en los diferentes casos descritos anteriormente. Podemos observar que conforme el número de incrementos dados baja, la estimación de la fuerza máxima también lo hace, siendo para el caso de 2500 incrementos de 253.322 N en comparación con el caso de 100 incrementos cuyo valor es de 237.408 N. Lo que supone una disminución cercana al 7%.
Pero el efecto más llamativo al disminuir las iteraciones es la atenuación de los saltos que aparecen en esta curva. Si bien para los casos de 2500 incrementos y de 1250 incrementos si aparecen estos dientes de sierra y su forma es muy similar vemos que en el caso de 100 incrementos estos saltos desaparecen.
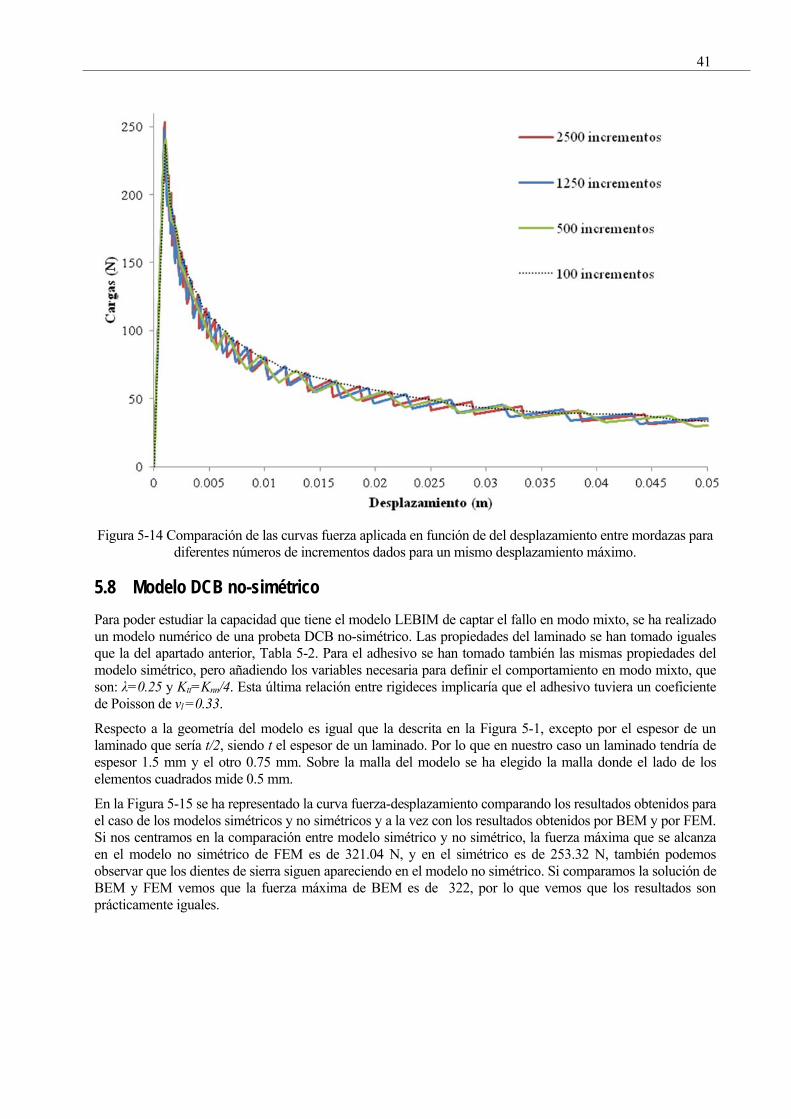
41
Figura 5-14 Comparación de las curvas fuerza aplicada en función de del desplazamiento entre mordazas para diferentes números de incrementos dados para un mismo desplazamiento máximo.
5.8 Modelo DCB no-simétrico
Para poder estudiar la capacidad que tiene el modelo LEBIM de captar el fallo en modo mixto, se ha realizado un modelo numérico de una probeta DCB no-simétrico. Las propiedades del laminado se han tomado iguales que la del apartado anterior, Tabla 5-2. Para el adhesivo se han tomado también las mismas propiedades del modelo simétrico, pero añadiendo los variables necesaria para definir el comportamiento en modo mixto, que son: λ=0.25 y Ktt=Knn/4. Esta última relación entre rigideces implicaría que el adhesivo tuviera un coeficiente de Poisson de νl =0.33.
Respecto a la geometría del modelo es igual que la descrita en la Figura 5-1, excepto por el espesor de un laminado que sería t/2, siendo t el espesor de un laminado. Por lo que en nuestro caso un laminado tendría de espesor 1.5 mm y el otro 0.75 mm. Sobre la malla del modelo se ha elegido la malla donde el lado de los elementos cuadrados mide 0.5 mm.
En la Figura 5-15 se ha representado la curva fuerza-desplazamiento comparando los resultados obtenidos para el caso de los modelos simétricos y no simétricos y a la vez con los resultados obtenidos por BEM y por FEM. Si nos centramos en la comparación entre modelo simétrico y no simétrico, la fuerza máxima que se alcanza en el modelo no simétrico de FEM es de 321.04 N, y en el simétrico es de 253.32 N, también podemos observar que los dientes de sierra siguen apareciendo en el modelo no simétrico. Si comparamos la solución de BEM y FEM vemos que la fuerza máxima de BEM es de 322, por lo que vemos que los resultados son prácticamente iguales.
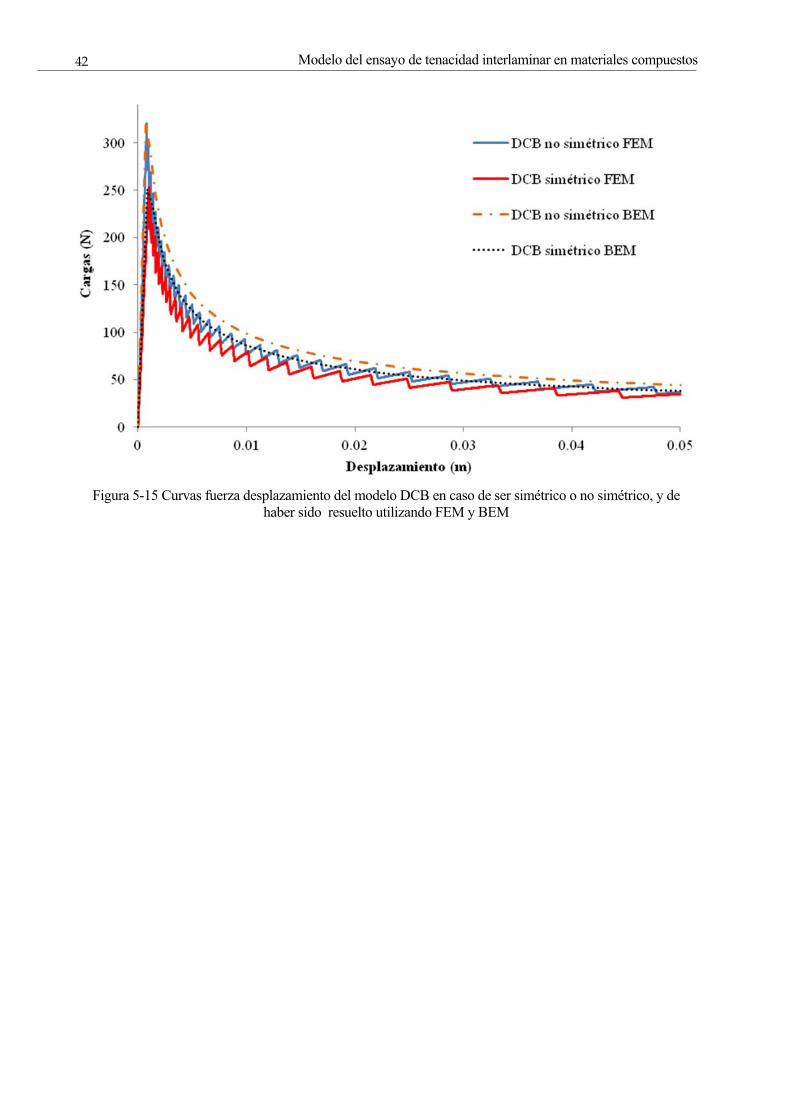
Modelo del ensayo de tenacidad interlaminar en materiales compuestos
42
Figura 5-15 Curvas fuerza desplazamiento del modelo DCB en caso de ser simétrico o no simétrico, y de haber sido resuelto utilizando FEM y BEM
43
6 MODELO UNIFIBRA
n este capítulo se estudiará el problema sobre el despegue y el crecimiento de una grieta en la interfase fibra matriz en un modelo en el cual sólo hay una fibra. Se considerará tanto que la matriz del modelo sea infinita (unas dimensiones mucho mayores a la de la matriz), como el caso de una sola fibra pero
inmersa en una matriz cuyas dimensiones son comparables con la de la fibra. Además se estudiará este modelo ante cargas en tensiones y en desplazamientos.
Para modelar la interfase se utilizará el modelo LEBIM presentado en el capítulo 2, que se implementará utilizando la subrutina UMAT. Este problema se ha resuelto con el código comercial de elementos finitos ABAQUS, utilizando los métodos numéricos descritos en el capítulo 4, es decir Newton-Raphson, añadiendo un factor de amortiguamiento ficticio y con el método Arc-length de Riks.
Las soluciones obtenidas para el caso de la fibra inmersa en una matriz infinita, se compararan con las obtenidas anteriormente utilizando un código BEM [23, 36, 37], el cuál fue anterior a este proyecto y también utilizo el modelo LEBIM en la interfase. Al ser anterior el modelo en BEM, este modelo de la fibra inmersa en una matriz infinita en FEM tiene las mismas geometrías y propiedades, por lo que la comparación de ambos resultados servirá como verificación del funcionamiento del modelo LEBIM en el código de FEM ABAQUS, usando la subrutina UMAT.
Este capítulo se organizará de la siguiente forma, en primer lugar el problema unifibra inmerso en una matriz infinita será presentado en la sección 6.1. Las propiedades mecánicas del modelo se describirán en la subsección 6.1.1. Los detalles del modelo de FEM serán detallados en la subsección 6.1.2. Un estudio sobre la sensibilidad a la malla se realizará en 6.1.3 y la comparación de los resultados de este modelo con los obtenidos en BEM se hará en la subsección 6.1.4.
El segundo modelo que se resolverá en este capítulo será el modelo unifibra inmerso en una matriz pequeña. La organización que se realizará será equivalente a la organización seguida en el modelo anterior. En la subsección 6.2.1se compara el modelo nuevo con el modelo de la matriz infinita. Los detalles del modelo en FEM se presentarán en 6.2.2. Por último los resultados de los modelos de la matriz finita se mostraran en 6.2.3.
6.1 Modelo matriz infinita
El estudio sobre el despegue en la interfase en una inclusión elástica cilíndrica en una matriz elástica sometida a unas cargas exteriores ha sido estudiado por diferentes investigadores [8, 25]
El modelo estudiado en este apartado es el de una fibra de longitud infinita inmersa en una matriz infinita (cuyas dimensiones son muchos mayores a que el radio de la fibra). En la Figura 6-1 se puede observar los dos sistemas de coordenados definidos, donde el sistema (x, y, z) es el sistema Cartesiano, y el sistema (r, θ, z). El eje z sigue la dirección longitudinal de la fibra, es decir perpendicular al folio, la dirección x es la misma que la de la carga exterior mostrada. Ambos sistemas coordenados tienen su origen en el centro de la fibra. La longitud del modelo en la dirección z es infinito por lo que estamos ante un problema de deformación plana.
E
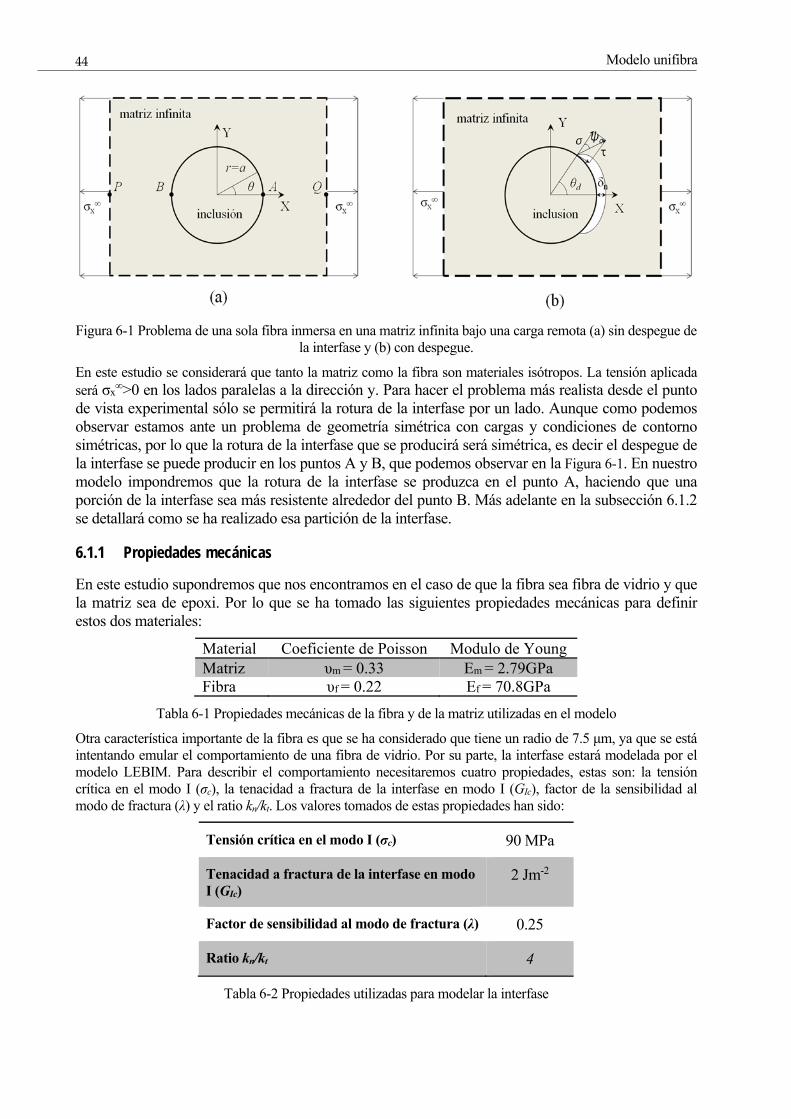
Modelo unifibra
44
Figura 6-1 Problema de una sola fibra inmersa en una matriz infinita bajo una carga remota (a) sin despegue de la interfase y (b) con despegue.
En este estudio se considerará que tanto la matriz como la fibra son materiales isótropos. La tensión aplicada será σx
∞>0 en los lados paralelas a la dirección y. Para hacer el problema más realista desde el punto de vista experimental sólo se permitirá la rotura de la interfase por un lado. Aunque como podemos observar estamos ante un problema de geometría simétrica con cargas y condiciones de contorno simétricas, por lo que la rotura de la interfase que se producirá será simétrica, es decir el despegue de la interfase se puede producir en los puntos A y B, que podemos observar en la Figura 6-1. En nuestro modelo impondremos que la rotura de la interfase se produzca en el punto A, haciendo que una porción de la interfase sea más resistente alrededor del punto B. Más adelante en la subsección 6.1.2 se detallará como se ha realizado esa partición de la interfase.
6.1.1 Propiedades mecánicas
En este estudio supondremos que nos encontramos en el caso de que la fibra sea fibra de vidrio y que la matriz sea de epoxi. Por lo que se ha tomado las siguientes propiedades mecánicas para definir estos dos materiales:
Material Coeficiente de Poisson Modulo de Young Matriz υm = 0.33 Em = 2.79GPa Fibra υf = 0.22 Ef = 70.8GPa
Tabla 6-1 Propiedades mecánicas de la fibra y de la matriz utilizadas en el modelo
Otra característica importante de la fibra es que se ha considerado que tiene un radio de 7.5 μm, ya que se está intentando emular el comportamiento de una fibra de vidrio. Por su parte, la interfase estará modelada por el modelo LEBIM. Para describir el comportamiento necesitaremos cuatro propiedades, estas son: la tensión crítica en el modo I (σc), la tenacidad a fractura de la interfase en modo I (GIc), factor de la sensibilidad al modo de fractura (λ) y el ratio kn/kt. Los valores tomados de estas propiedades han sido:
Tensión crítica en el modo I (σc) 90 MPa
Tenacidad a fractura de la interfase en modo I (GIc)
2 Jm-2
Factor de sensibilidad al modo de fractura (λ) 0.25
Ratio kn/kt 4
Tabla 6-2 Propiedades utilizadas para modelar la interfase
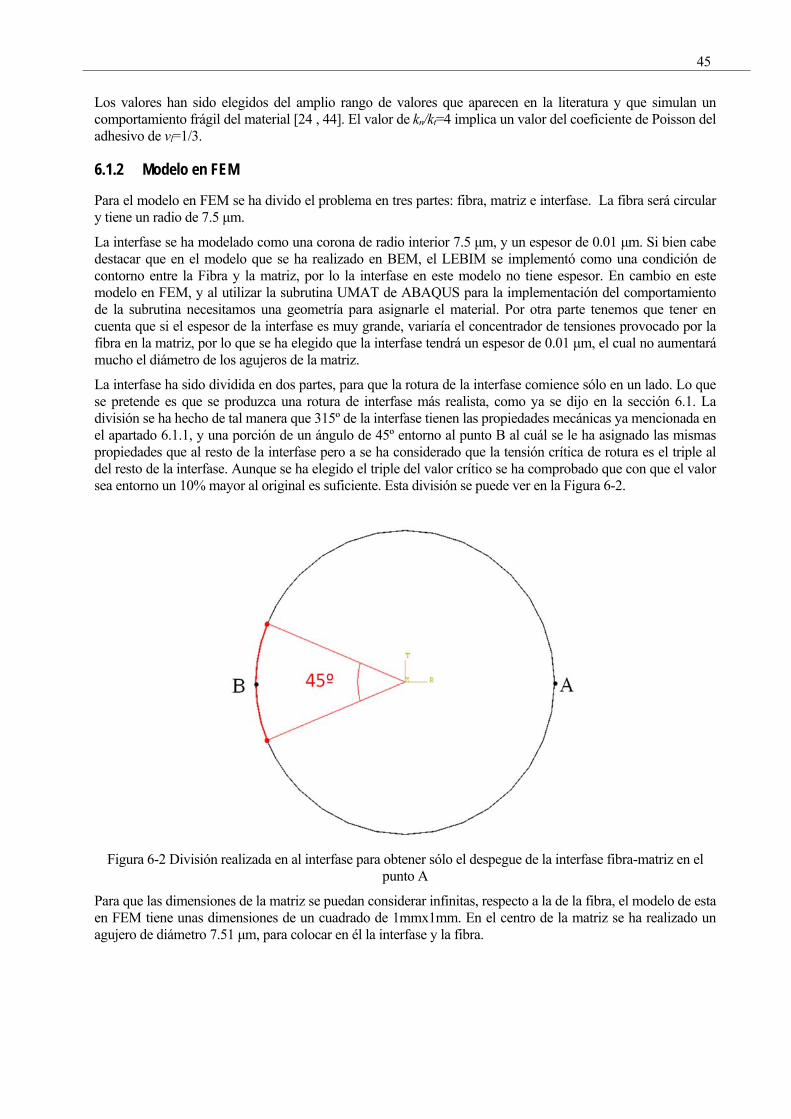
45
Los valores han sido elegidos del amplio rango de valores que aparecen en la literatura y que simulan un comportamiento frágil del material [24 , 44]. El valor de kn/kt=4 implica un valor del coeficiente de Poisson del adhesivo de νl=1/3.
6.1.2 Modelo en FEM
Para el modelo en FEM se ha divido el problema en tres partes: fibra, matriz e interfase. La fibra será circular y tiene un radio de 7.5 μm.
La interfase se ha modelado como una corona de radio interior 7.5 μm, y un espesor de 0.01 μm. Si bien cabe destacar que en el modelo que se ha realizado en BEM, el LEBIM se implementó como una condición de contorno entre la Fibra y la matriz, por lo la interfase en este modelo no tiene espesor. En cambio en este modelo en FEM, y al utilizar la subrutina UMAT de ABAQUS para la implementación del comportamiento de la subrutina necesitamos una geometría para asignarle el material. Por otra parte tenemos que tener en cuenta que si el espesor de la interfase es muy grande, variaría el concentrador de tensiones provocado por la fibra en la matriz, por lo que se ha elegido que la interfase tendrá un espesor de 0.01 μm, el cual no aumentará mucho el diámetro de los agujeros de la matriz.
La interfase ha sido dividida en dos partes, para que la rotura de la interfase comience sólo en un lado. Lo que se pretende es que se produzca una rotura de interfase más realista, como ya se dijo en la sección 6.1. La división se ha hecho de tal manera que 315º de la interfase tienen las propiedades mecánicas ya mencionada en el apartado 6.1.1, y una porción de un ángulo de 45º entorno al punto B al cuál se le ha asignado las mismas propiedades que al resto de la interfase pero a se ha considerado que la tensión crítica de rotura es el triple al del resto de la interfase. Aunque se ha elegido el triple del valor crítico se ha comprobado que con que el valor sea entorno un 10% mayor al original es suficiente. Esta división se puede ver en la Figura 6-2.
Figura 6-2 División realizada en al interfase para obtener sólo el despegue de la interfase fibra-matriz en el punto A
Para que las dimensiones de la matriz se puedan considerar infinitas, respecto a la de la fibra, el modelo de esta en FEM tiene unas dimensiones de un cuadrado de 1mmx1mm. En el centro de la matriz se ha realizado un agujero de diámetro 7.51 μm, para colocar en él la interfase y la fibra.
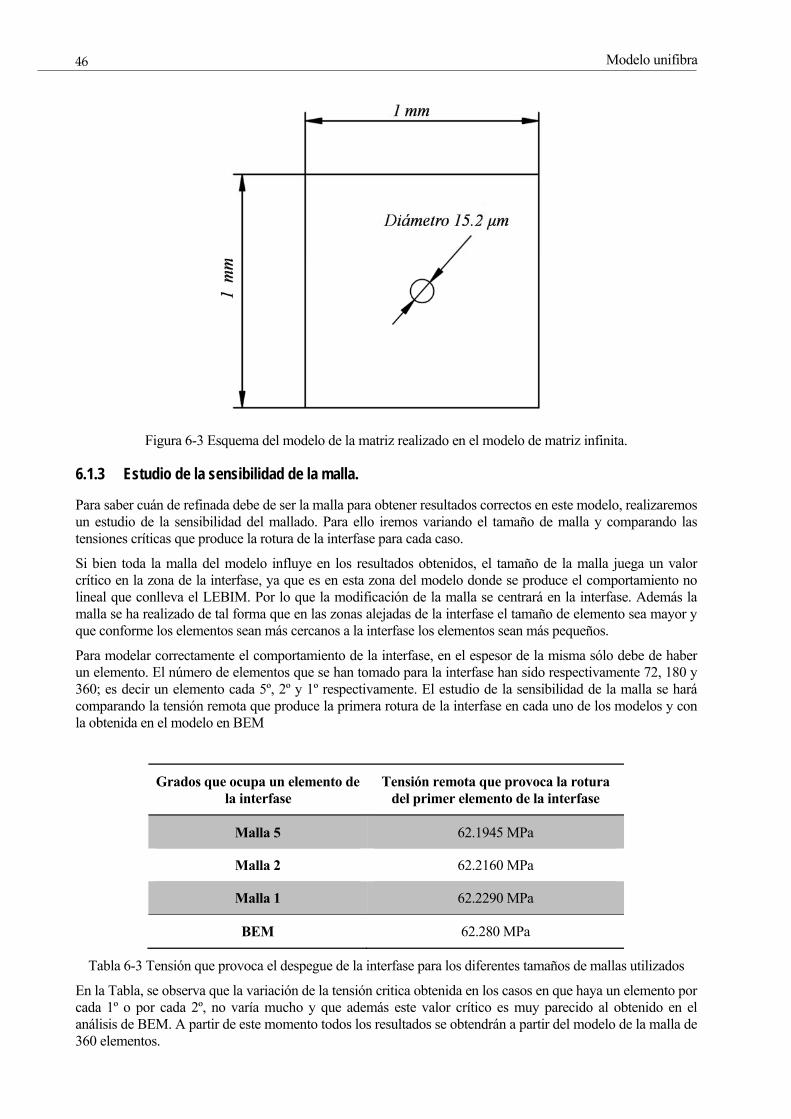
Modelo unifibra
46
Figura 6-3 Esquema del modelo de la matriz realizado en el modelo de matriz infinita.
6.1.3 Estudio de la sensibilidad de la malla.
Para saber cuán de refinada debe de ser la malla para obtener resultados correctos en este modelo, realizaremos un estudio de la sensibilidad del mallado. Para ello iremos variando el tamaño de malla y comparando las tensiones críticas que produce la rotura de la interfase para cada caso.
Si bien toda la malla del modelo influye en los resultados obtenidos, el tamaño de la malla juega un valor crítico en la zona de la interfase, ya que es en esta zona del modelo donde se produce el comportamiento no lineal que conlleva el LEBIM. Por lo que la modificación de la malla se centrará en la interfase. Además la malla se ha realizado de tal forma que en las zonas alejadas de la interfase el tamaño de elemento sea mayor y que conforme los elementos sean más cercanos a la interfase los elementos sean más pequeños.
Para modelar correctamente el comportamiento de la interfase, en el espesor de la misma sólo debe de haber un elemento. El número de elementos que se han tomado para la interfase han sido respectivamente 72, 180 y 360; es decir un elemento cada 5º, 2º y 1º respectivamente. El estudio de la sensibilidad de la malla se hará comparando la tensión remota que produce la primera rotura de la interfase en cada uno de los modelos y con la obtenida en el modelo en BEM
Grados que ocupa un elemento de la interfase
Tensión remota que provoca la rotura del primer elemento de la interfase
Malla 5 62.1945 MPa
Malla 2 62.2160 MPa
Malla 1 62.2290 MPa
BEM 62.280 MPa
Tabla 6-3 Tensión que provoca el despegue de la interfase para los diferentes tamaños de mallas utilizados
En la Tabla, se observa que la variación de la tensión critica obtenida en los casos en que haya un elemento por cada 1º o por cada 2º, no varía mucho y que además este valor crítico es muy parecido al obtenido en el análisis de BEM. A partir de este momento todos los resultados se obtendrán a partir del modelo de la malla de 360 elementos.
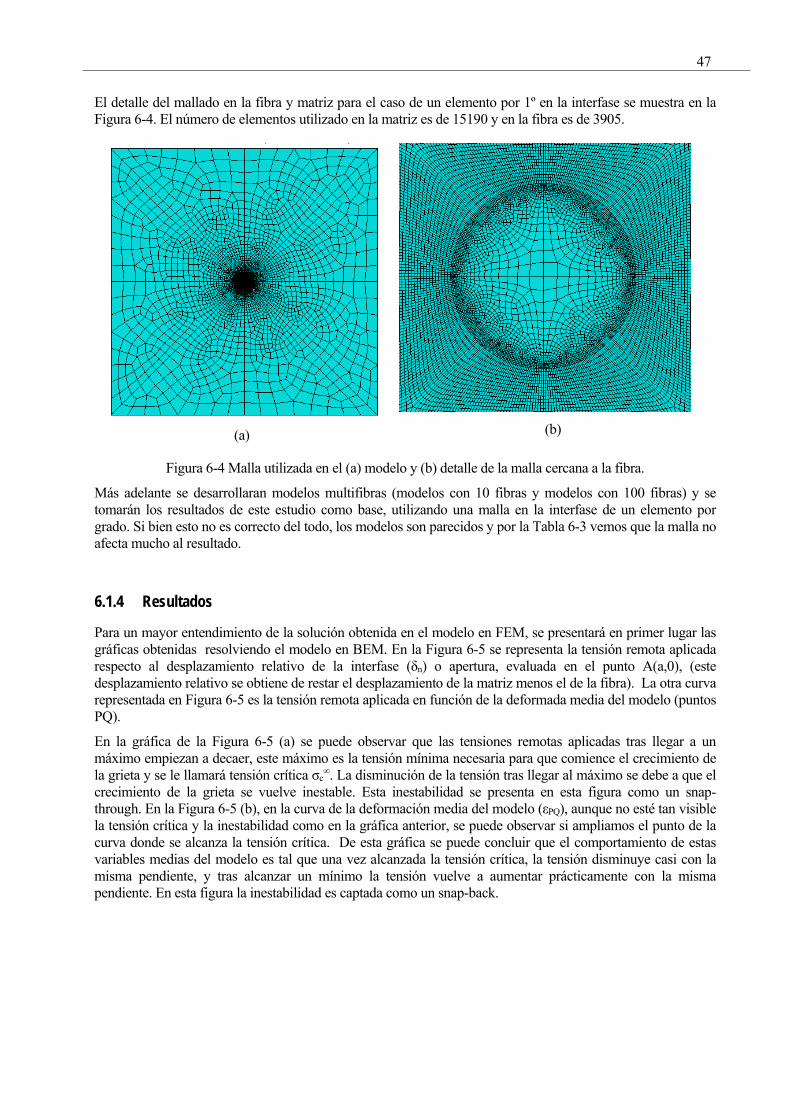
47
El detalle del mallado en la fibra y matriz para el caso de un elemento por 1º en la interfase se muestra en la Figura 6-4. El número de elementos utilizado en la matriz es de 15190 y en la fibra es de 3905.
(a)
(b)
Figura 6-4 Malla utilizada en el (a) modelo y (b) detalle de la malla cercana a la fibra.
Más adelante se desarrollaran modelos multifibras (modelos con 10 fibras y modelos con 100 fibras) y se tomarán los resultados de este estudio como base, utilizando una malla en la interfase de un elemento por grado. Si bien esto no es correcto del todo, los modelos son parecidos y por la Tabla 6-3 vemos que la malla no afecta mucho al resultado.
6.1.4 Resultados
Para un mayor entendimiento de la solución obtenida en el modelo en FEM, se presentará en primer lugar las gráficas obtenidas resolviendo el modelo en BEM. En la Figura 6-5 se representa la tensión remota aplicada respecto al desplazamiento relativo de la interfase (δn) o apertura, evaluada en el punto A(a,0), (este desplazamiento relativo se obtiene de restar el desplazamiento de la matriz menos el de la fibra). La otra curva representada en Figura 6-5 es la tensión remota aplicada en función de la deformada media del modelo (puntos PQ).
En la gráfica de la Figura 6-5 (a) se puede observar que las tensiones remotas aplicadas tras llegar a un máximo empiezan a decaer, este máximo es la tensión mínima necesaria para que comience el crecimiento de la grieta y se le llamará tensión crítica σc
∞. La disminución de la tensión tras llegar al máximo se debe a que el crecimiento de la grieta se vuelve inestable. Esta inestabilidad se presenta en esta figura como un snap-through. En la Figura 6-5 (b), en la curva de la deformación media del modelo (εPQ), aunque no esté tan visible la tensión crítica y la inestabilidad como en la gráfica anterior, se puede observar si ampliamos el punto de la curva donde se alcanza la tensión crítica. De esta gráfica se puede concluir que el comportamiento de estas variables medias del modelo es tal que una vez alcanzada la tensión crítica, la tensión disminuye casi con la misma pendiente, y tras alcanzar un mínimo la tensión vuelve a aumentar prácticamente con la misma pendiente. En esta figura la inestabilidad es captada como un snap-back.
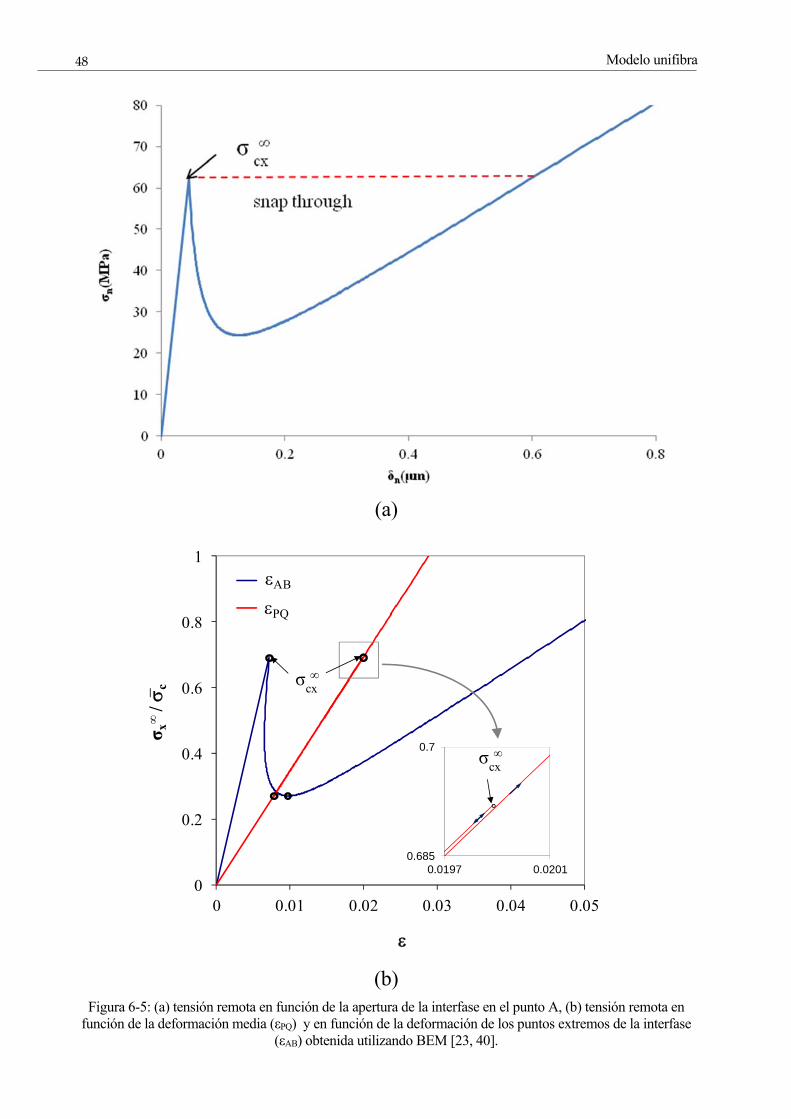
Modelo unifibra
48
(a)
(b) Figura 6-5: (a) tensión remota en función de la apertura de la interfase en el punto A, (b) tensión remota en
función de la deformación media (εPQ) y en función de la deformación de los puntos extremos de la interfase (εAB) obtenida utilizando BEM [23, 40].
0
0.2
0.4
0.6
0.8
1
0 0.01 0.02 0.03 0.04 0.05
σ x∞
/ c
0.685
0.7
0.0197 0.0201
σ ∞cx
σ ∞cx
AB
PQ
49
Si bien esta inestabilidad es difícilmente obtenible con los métodos de resolución tradicionalmente utilizados en los códigos comerciales de elementos finitos (Newton-Raphson), puedo ser captada utilizando BEM porque el algoritmo de resolución utilizado fue el “linear sequential analysis” desarrollado por L. Távara [36]. El funcionamiento se puede resumir que para cada iteración dada verifica que los elementos de la interfase (modelados como muelles) no alcanzan la condición de rotura. Si en alguna ocasión durante la iteración se produce la rotura de algún elemento, se cambia las rigideces del mismo según el modelo LEBIM (capitulo 2) y se vuelve a resolver el problema. Una descripción mucho más profundidad del algoritmo se puede encontrar en [36].
En ABAQUS, si resolvemos este problema cómo un problema estático se utilizará el algoritmo de Newton-Raphson para resolver las ecuaciones resultantes de plantear el problema en elementos finitos. La convergencia del problema está garantizada si hay un camino de equilibrio estático entre el estado inicial del sólido en la iteración y el final. Con Newton-Raphson en cada iteración se produce un incremento de carga, esto se traduce a que el trabajo realizado por las cargas en cada iteración será mayor o igual que cero. Para que el sólido este en equilibrio el trabajo realizado por las cargas debe de ser igual a la energía elástica almacenada en el sólido más la energía liberada durante el crecimiento de la grieta. Esto se puede resumir en la ecuación (1.1) . Donde Wext es el trabajo realizado por las cargas exteriores, Ue es la energía elástica almacenada en el sólido y Γ es la energía necesaria para que crezca la grieta.
ext eW U (1.1)
Una vez alcanzado la σc∞ tanto la energía elástica almacenada como la energía necesaria para hacer que la
grieta siga creciendo disminuye, por lo que el termino derecho de la ecuación (1.1). Por lo para que se cumpla la igualdad el término de la izquierda también debe de disminuir.
Para poder obtener soluciones en este problema se pueden proponer varias estrategias. La primera sería seguir el método de resolución de NR, pero hacerlo insensible a la inestabilidad. Esto se consigue permitiendo al algoritmo de NR dar muchas iteraciones en cada incremento. La solución obtenida de esta forma no tendría ningún punto de solución durante el snap-through.
Otra estrategia para resolver la solución durante la inestabilidad sería añadiendo una viscosidad ficticia al modelo, y haciendo que la energía disipada por la viscosidad equilibre la diferencia de trabajo realizado por las cargas exteriores con la energía liberada por la creación de la interfase más la energía elástica almacenada. Si bien la solución se puede obtener durante toda la inestabilidad, al añadir el termino energético de la viscosidad, el camino de la solución en la gráfica Fuerza desplazamiento variará. Esta viscosidad se puede agregar al modelo de dos formas diferentes, la primera sería añadiendo la viscosidad sólo al modelo de la interfase [12] o en todo el modelo [34]. La primera opción tiene la ventaja respecto a la segunda que la viscosidad ficticia añadida no afecta al modelo entero, sólo a la interfase. Si bien en este estudio se ha optado por la segunda opción en primer lugar para no modificar el comportamiento (LEBIM) de la interfase y porque si el coeficiente de viscosidad es suficientemente bajo, este sólo afectará de manera significativa a las partes del modelo que tengan un gran desplazamiento en poco tiempo (ecuación de energía de amortiguamiento) que en nuestro caso sólo es en la interfase cuando la grieta comienza a crecer.
Otra estrategia de resolución sería utilizando métodos numéricos tipo Arc-Length, los cuales permiten que las cargas realicen trabajo negativo, con lo que el balance energético se puede cumplir durante la inestabilidad. ABAQUS sólo tiene implementado el método modificado de Riks, que ya fue explicado en el capítulo 4. Pero el problema que tiene este método para este problema es que Riks para calcular las variables modificadas a partir de las cuales calcula la solución del problema, utilizas las variables medias, y al ser tan pequeña la inestabilidad en las variables medias del problema se necesitaría una sensibilidad muy grande en este método para que pueda captar de captar el snap-back de la gráfica de la Figura 6-5, por lo que la solución que se obtiene usando este método es igual a la obtenida utilizando Newton-Raphson.
Se podría llegar a pensar que utilizando unas cargas de desplazamiento en vez de las cargas en tensiones utilizadas, podría obtenerse una parte mayor de la curva solución del problema. Pero si ampliamos la zona de inestabilidad en la gráfica de tensión media respecto a deformación media, gráfica (b) de la Figura 6-6. La diferencia que habría entre aplicar las cargas en deformación o en tensión, sería que aplicar tensiones la solución que es posible captar esta limitada por una línea horizontal en la gráfica, mientras que si se utiliza la carga en desplazamientos la zona fuera de la inestabilidad esta limitada por una línea vertical. La diferencia de puntos captables es muy pequeña si la comparamos con la zona entera de inestabilidad. Por lo que añadir estos puntos no supone un gran incremento en el conocimiento de la curva.
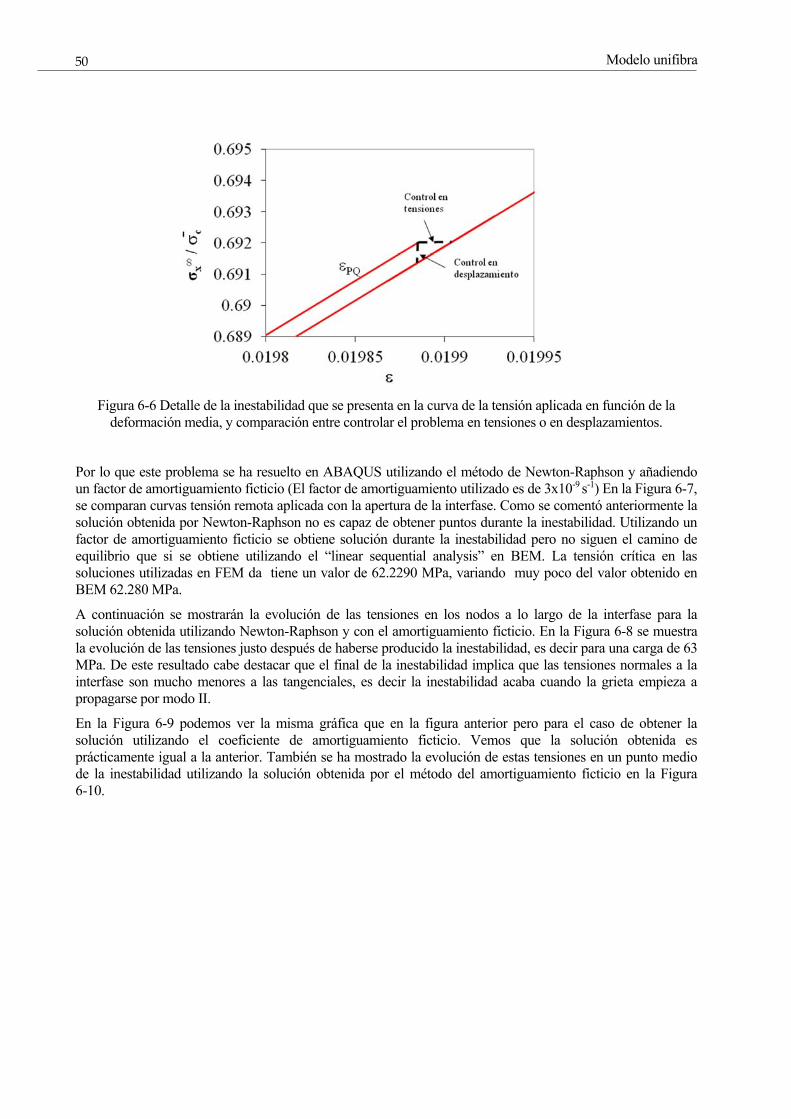
Modelo unifibra
50
Figura 6-6 Detalle de la inestabilidad que se presenta en la curva de la tensión aplicada en función de la deformación media, y comparación entre controlar el problema en tensiones o en desplazamientos.
Por lo que este problema se ha resuelto en ABAQUS utilizando el método de Newton-Raphson y añadiendo un factor de amortiguamiento ficticio (El factor de amortiguamiento utilizado es de 3x10-9 s-1) En la Figura 6-7, se comparan curvas tensión remota aplicada con la apertura de la interfase. Como se comentó anteriormente la solución obtenida por Newton-Raphson no es capaz de obtener puntos durante la inestabilidad. Utilizando un factor de amortiguamiento ficticio se obtiene solución durante la inestabilidad pero no siguen el camino de equilibrio que si se obtiene utilizando el “linear sequential analysis” en BEM. La tensión crítica en las soluciones utilizadas en FEM da tiene un valor de 62.2290 MPa, variando muy poco del valor obtenido en BEM 62.280 MPa.
A continuación se mostrarán la evolución de las tensiones en los nodos a lo largo de la interfase para la solución obtenida utilizando Newton-Raphson y con el amortiguamiento ficticio. En la Figura 6-8 se muestra la evolución de las tensiones justo después de haberse producido la inestabilidad, es decir para una carga de 63 MPa. De este resultado cabe destacar que el final de la inestabilidad implica que las tensiones normales a la interfase son mucho menores a las tangenciales, es decir la inestabilidad acaba cuando la grieta empieza a propagarse por modo II.
En la Figura 6-9 podemos ver la misma gráfica que en la figura anterior pero para el caso de obtener la solución utilizando el coeficiente de amortiguamiento ficticio. Vemos que la solución obtenida es prácticamente igual a la anterior. También se ha mostrado la evolución de estas tensiones en un punto medio de la inestabilidad utilizando la solución obtenida por el método del amortiguamiento ficticio en la Figura 6-10.
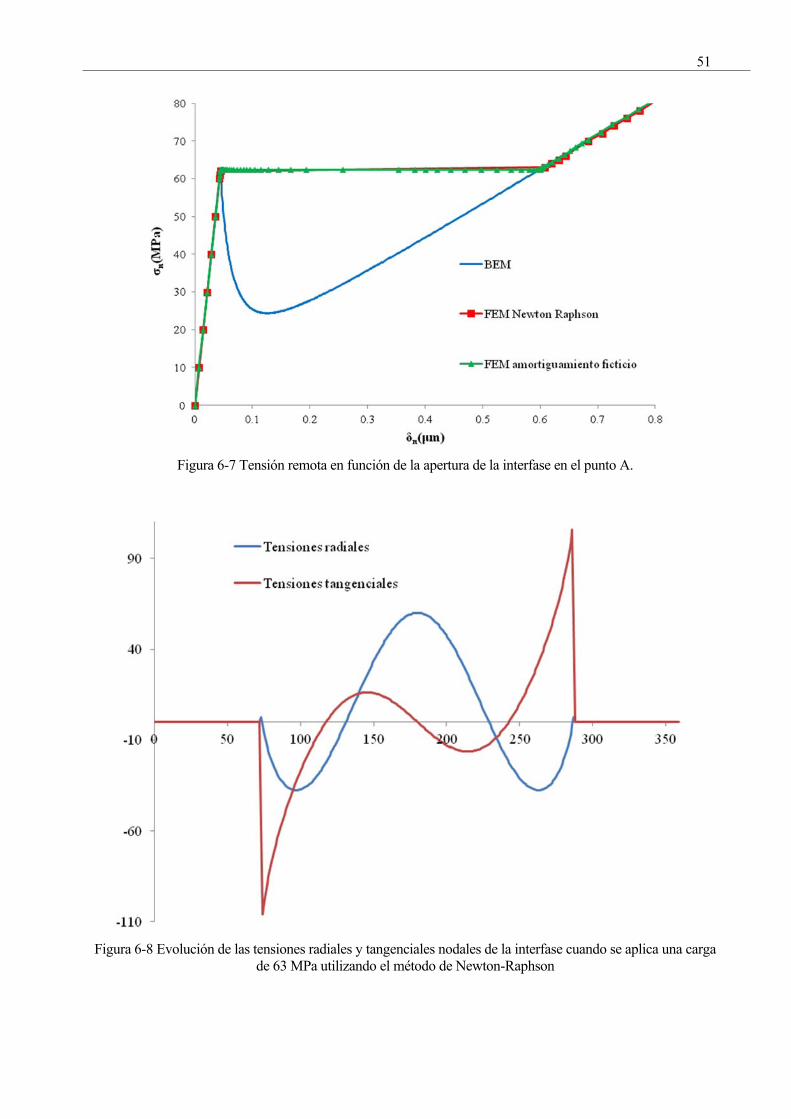
51
Figura 6-7 Tensión remota en función de la apertura de la interfase en el punto A.
Figura 6-8 Evolución de las tensiones radiales y tangenciales nodales de la interfase cuando se aplica una carga de 63 MPa utilizando el método de Newton-Raphson
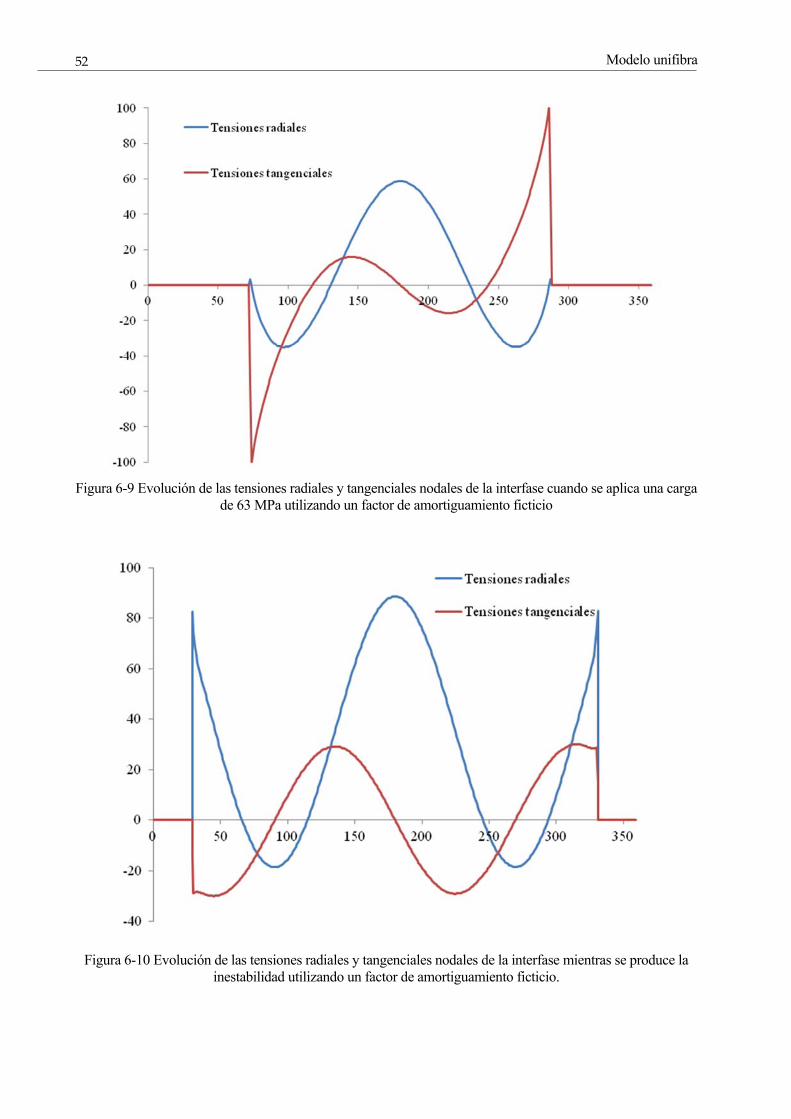
Modelo unifibra
52
Figura 6-9 Evolución de las tensiones radiales y tangenciales nodales de la interfase cuando se aplica una carga de 63 MPa utilizando un factor de amortiguamiento ficticio
Figura 6-10 Evolución de las tensiones radiales y tangenciales nodales de la interfase mientras se produce la inestabilidad utilizando un factor de amortiguamiento ficticio.
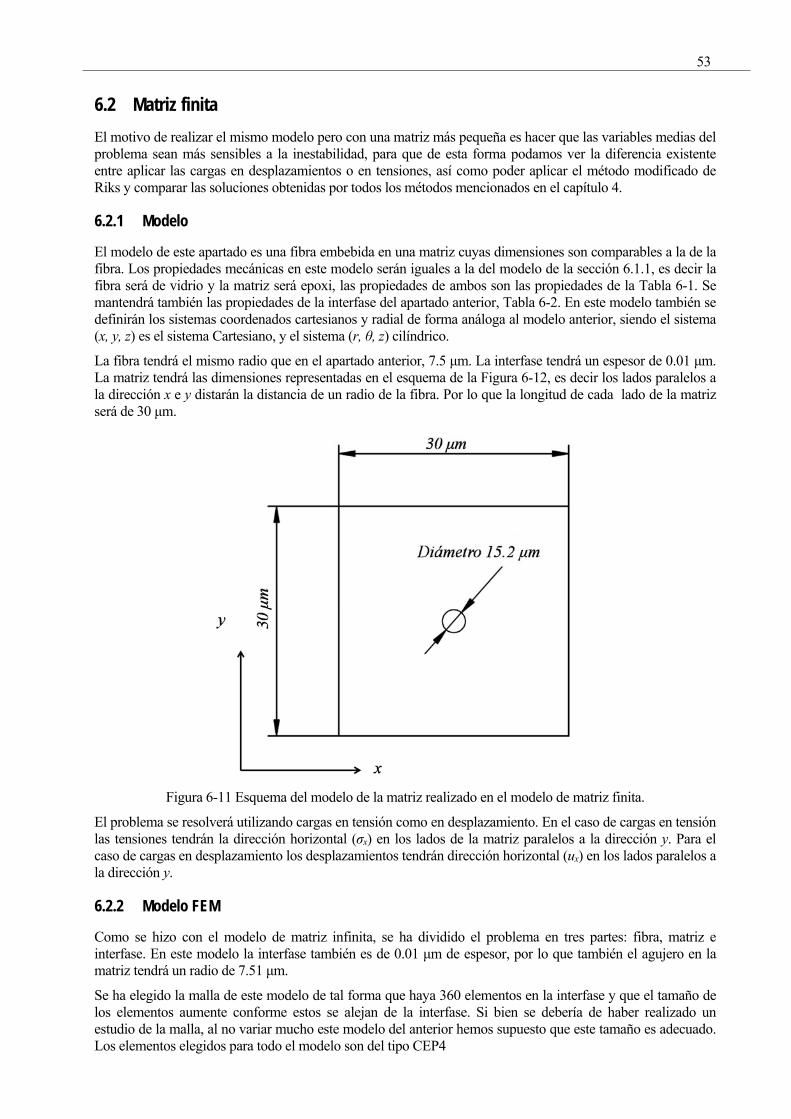
53
6.2 Matriz finita
El motivo de realizar el mismo modelo pero con una matriz más pequeña es hacer que las variables medias del problema sean más sensibles a la inestabilidad, para que de esta forma podamos ver la diferencia existente entre aplicar las cargas en desplazamientos o en tensiones, así como poder aplicar el método modificado de Riks y comparar las soluciones obtenidas por todos los métodos mencionados en el capítulo 4.
6.2.1 Modelo
El modelo de este apartado es una fibra embebida en una matriz cuyas dimensiones son comparables a la de la fibra. Los propiedades mecánicas en este modelo serán iguales a la del modelo de la sección 6.1.1, es decir la fibra será de vidrio y la matriz será epoxi, las propiedades de ambos son las propiedades de la Tabla 6-1. Se mantendrá también las propiedades de la interfase del apartado anterior, Tabla 6-2. En este modelo también se definirán los sistemas coordenados cartesianos y radial de forma análoga al modelo anterior, siendo el sistema (x, y, z) es el sistema Cartesiano, y el sistema (r, θ, z) cilíndrico.
La fibra tendrá el mismo radio que en el apartado anterior, 7.5 μm. La interfase tendrá un espesor de 0.01 μm. La matriz tendrá las dimensiones representadas en el esquema de la Figura 6-12, es decir los lados paralelos a la dirección x e y distarán la distancia de un radio de la fibra. Por lo que la longitud de cada lado de la matriz será de 30 μm.
Figura 6-11 Esquema del modelo de la matriz realizado en el modelo de matriz finita.
El problema se resolverá utilizando cargas en tensión como en desplazamiento. En el caso de cargas en tensión las tensiones tendrán la dirección horizontal (σx) en los lados de la matriz paralelos a la dirección y. Para el caso de cargas en desplazamiento los desplazamientos tendrán dirección horizontal (ux) en los lados paralelos a la dirección y.
6.2.2 Modelo FEM
Como se hizo con el modelo de matriz infinita, se ha dividido el problema en tres partes: fibra, matriz e interfase. En este modelo la interfase también es de 0.01 μm de espesor, por lo que también el agujero en la matriz tendrá un radio de 7.51 μm.
Se ha elegido la malla de este modelo de tal forma que haya 360 elementos en la interfase y que el tamaño de los elementos aumente conforme estos se alejan de la interfase. Si bien se debería de haber realizado un estudio de la malla, al no variar mucho este modelo del anterior hemos supuesto que este tamaño es adecuado. Los elementos elegidos para todo el modelo son del tipo CEP4
Modelo unifibra
54
Para obtener sólo el despegue de la matriz en una parte de la fibra para que los resultados sean más realistas, esta se ha divido en dos partes como ya se hizo en el modelo de la sección 6.1. De esta forma la división de 45º entorno al punto B (esquema de la figura Figura 6-2), tendrá una tensión crítica de rotura 3 veces mayor que la especificada en Tabla 6-1.
En la Figura 6-12 se muestra la malla utilizada en la fibra y la matriz. El número de elementos en la fibra es de 3905 y de la matriz es de 10938.
Figura 6-12 Malla utilizada en el modelo unifibra inmersa en matriz pequeña
6.2.3 Resultados
El propósito de este modelo es que cuando se alcance el primer punto de rotura de la interfase (comience la inestabilidad) la inestabilidad se aleje más de la parte sin daño de la curva. Además en este caso si se puede apreciar una diferencia entre aplicar la carga en tensiones o en desplazamiento. Por lo que el problema se resolverá utilizando tanto Newton-Raphson, amortiguamiento ficticio y el método de Risk modificado, tanto con las cargas en tensiones como en desplazamiento. Al aplicar cargas en tensiones o en desplazamiento realmente estamos resolviendo dos problemas diferentes, por lo que no tiene mucho sentido una comparación cuantitativa, pero si se puede realizar una comparación cualitativa de las soluciones obtenidas.
6.2.3.1 Resultados de carga en tensiones
En primer lugar en la gráfica (a) de la Figura 6-13 se muestra la evolución de la tensión aplicada, respecto a la deformación media (εPQ) y en la gráfica (b) se ha representado la evolución de las tensiones respecto a la apertura de la interfase. Debido a la inestabilidad se produce un salto en los puntos que obtenemos al resolver utilizando el método de Newton-Raphson y el de Riks. En la gráfica se ha representado esa ausencia de puntos con una línea discontinua para una mayor claridad.
Podemos ver cómo como la solución obtenida por Newton-Raphson no mejora mucho respecto al caso de la matriz infinita. El amortiguamiento ficticio utilizado es de 1x10-8 s-1, y vemos que el comportamiento de la solución para este caso es equivalente al comportamiento mostrado en el caso de la matriz infinita. Respecto a la resolución con el método Arc-length de Riks vemos que (aunque se obtiene menos puntos durante la inestabilidad que utilizando el amortiguamiento ficticio) el camino que sigue la curva si esta en equilibrio. Si nos fijamos en la tensión critica que produce la primera rotura de la interfase, esta tiene un valor de 73.34 MPa para los casos de Newton-Raphson y con amortiguamiento ficticio. Para el caso de Riks la tensión crítica es de 73.17 MPa. Vemos que todos los modelos dan un valor muy próximo entre sí para la tensión crítica.
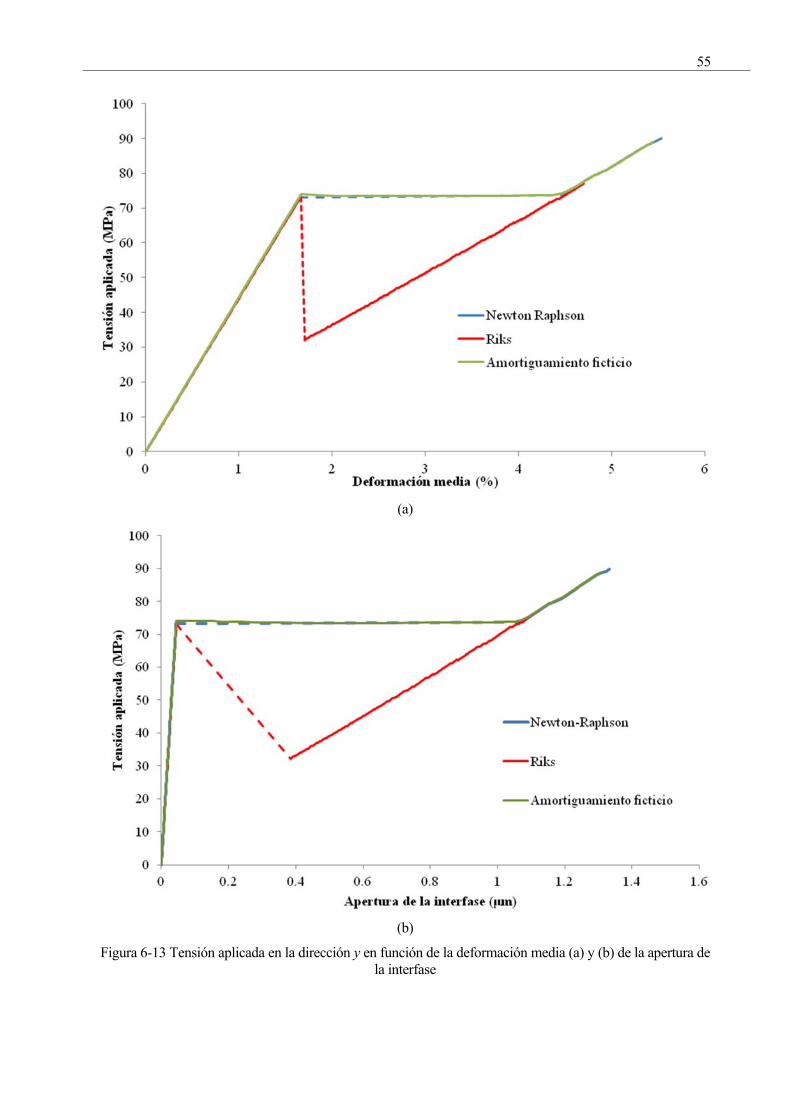
55
(a)
(b)
Figura 6-13 Tensión aplicada en la dirección y en función de la deformación media (a) y (b) de la apertura de la interfase
Modelo unifibra
56
6.2.3.2 Resultados carga en desplazamiento
Ya que la carga en estos modelos esta aplicada en forma de desplazamiento necesario para producir el despegue, utilizaremos la tensión media sobre los lados de la matrices donde se aplica el desplazamiento, para hacernos una idea de cómo evolucionan las tensiones. En la gráfica (a) de la Figura 6-14 se ha representado la evolución de esta tensión respecto a la deformación media del modelo (εPQ), y en la gráfica (b) de la misma figura vemos la evolución de la tensión media aplicada respecto a la apertura de la interfase. Debido a la inestabilidad se produce un salto en los puntos que obtenemos al resolver utilizando el método de Newton-Raphson y el de Riks. En la gráfica se ha representado esa ausencia de puntos en línea de guiones para una mayor claridad.
Al aplicar como cargas desplazamientos, la tensión media aplicada se ha calculado a partir de la suma de la fuerza de reacción en los nodos donde se aplica el desplazamiento.
En la Figura 6-14 (a) vemos como la solución obtenida por el método de Newton-Raphson sigue una línea vertical tras alcanzar la tensión máxima, por lo que vemos que si contralamos la carga en desplazamiento somos capaces de obtener más puntos solución que controlando en tensión. Si nos centramos en la solución obtenida al añadir un factor de amortiguamiento ficticio, vemos que la solución obtenida es equivalente al caso de control en tensiones, se obtiene solución durante la inestabilidad pero no sigue el camino de equilibrio. Con el método de Riks conseguimos obtener más puntos durante la inestabilidad que con Newton-Raphson, pero sigue produciéndose un salto en las soluciones. La ventaja de esta solución respecto a la obtenido utilizando el factor de amortiguamiento ficticio es que con Riks la solución si se encuentra en equilibrio en todos los puntos.
Respecto a la tensión media crítica que produce la primera rotura de la interfase, esta toma un valor de 62.01 MPa para los casos de Newton-Raphson y del amortiguamiento ficticio. En el caso de Riks el valor de esta tensión media crítica es de 62.17 MPa. Se puede concluir que los valores de la tensión crítica obtenida por cada modo son lo suficientemente parecidas entre sí para considerarlas el mismo valor.
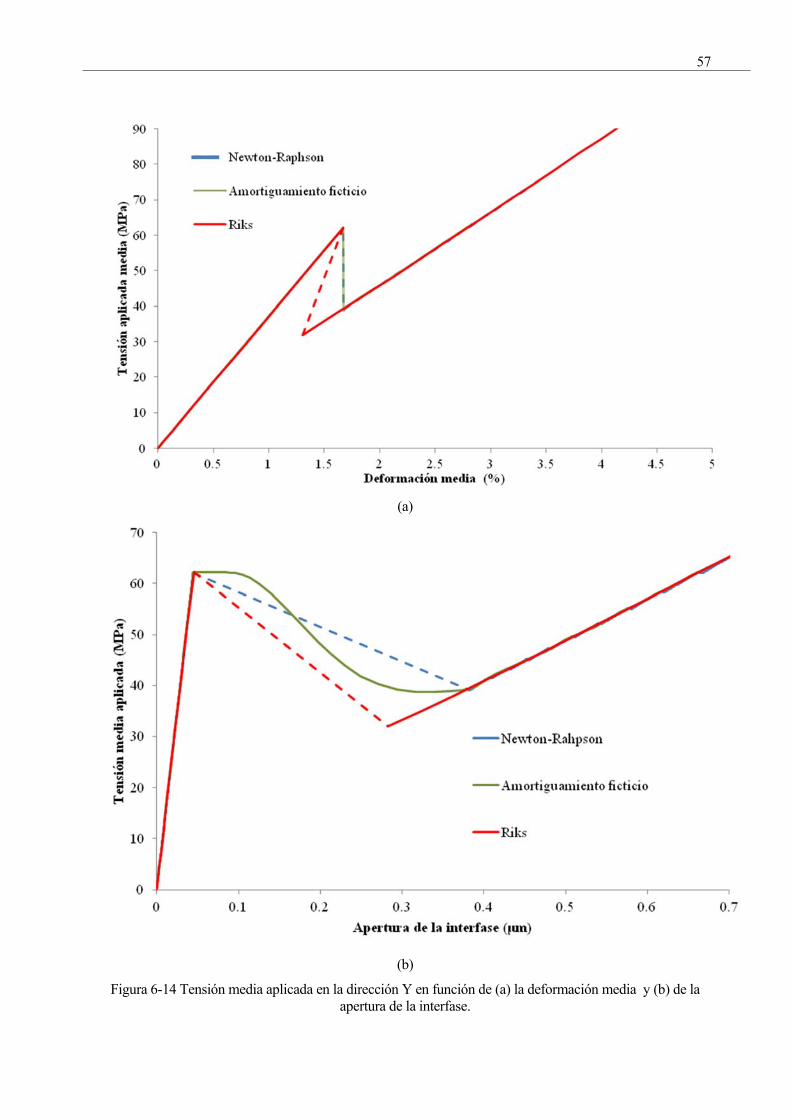
57
(a)
(b)
Figura 6-14 Tensión media aplicada en la dirección Y en función de (a) la deformación media y (b) de la apertura de la interfase.

Modelo unifibra
58
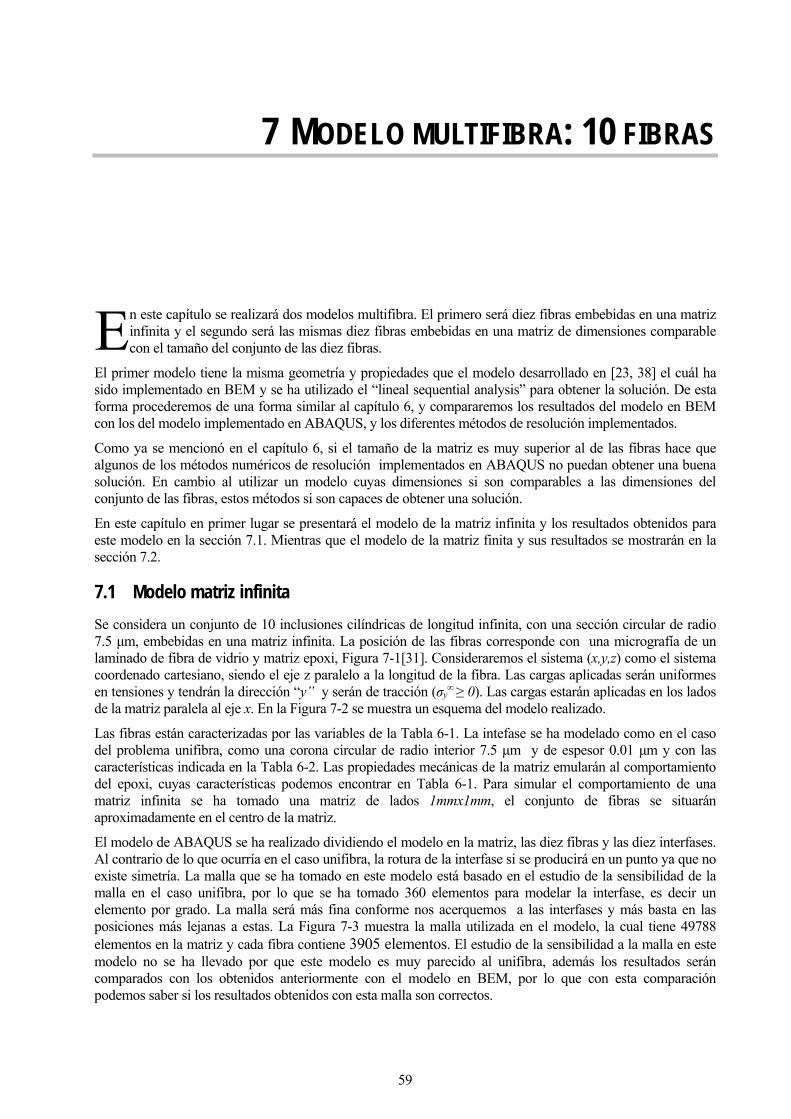
59
7 MODELO MULTIFIBRA: 10 FIBRAS
n este capítulo se realizará dos modelos multifibra. El primero será diez fibras embebidas en una matriz infinita y el segundo será las mismas diez fibras embebidas en una matriz de dimensiones comparable con el tamaño del conjunto de las diez fibras.
El primer modelo tiene la misma geometría y propiedades que el modelo desarrollado en [23, 38] el cuál ha sido implementado en BEM y se ha utilizado el “lineal sequential analysis” para obtener la solución. De esta forma procederemos de una forma similar al capítulo 6, y compararemos los resultados del modelo en BEM con los del modelo implementado en ABAQUS, y los diferentes métodos de resolución implementados.
Como ya se mencionó en el capítulo 6, si el tamaño de la matriz es muy superior al de las fibras hace que algunos de los métodos numéricos de resolución implementados en ABAQUS no puedan obtener una buena solución. En cambio al utilizar un modelo cuyas dimensiones si son comparables a las dimensiones del conjunto de las fibras, estos métodos si son capaces de obtener una solución.
En este capítulo en primer lugar se presentará el modelo de la matriz infinita y los resultados obtenidos para este modelo en la sección 7.1. Mientras que el modelo de la matriz finita y sus resultados se mostrarán en la sección 7.2.
7.1 Modelo matriz infinita
Se considera un conjunto de 10 inclusiones cilíndricas de longitud infinita, con una sección circular de radio 7.5 μm, embebidas en una matriz infinita. La posición de las fibras corresponde con una micrografía de un laminado de fibra de vidrio y matriz epoxi, Figura 7-1[31]. Consideraremos el sistema (x,y,z) como el sistema coordenado cartesiano, siendo el eje z paralelo a la longitud de la fibra. Las cargas aplicadas serán uniformes en tensiones y tendrán la dirección “y” y serán de tracción (σy
∞ ≥ 0). Las cargas estarán aplicadas en los lados de la matriz paralela al eje x. En la Figura 7-2 se muestra un esquema del modelo realizado.
Las fibras están caracterizadas por las variables de la Tabla 6-1. La intefase se ha modelado como en el caso del problema unifibra, como una corona circular de radio interior 7.5 μm y de espesor 0.01 μm y con las características indicada en la Tabla 6-2. Las propiedades mecánicas de la matriz emularán al comportamiento del epoxi, cuyas características podemos encontrar en Tabla 6-1. Para simular el comportamiento de una matriz infinita se ha tomado una matriz de lados 1mmx1mm, el conjunto de fibras se situarán aproximadamente en el centro de la matriz.
El modelo de ABAQUS se ha realizado dividiendo el modelo en la matriz, las diez fibras y las diez interfases. Al contrario de lo que ocurría en el caso unifibra, la rotura de la interfase si se producirá en un punto ya que no existe simetría. La malla que se ha tomado en este modelo está basado en el estudio de la sensibilidad de la malla en el caso unifibra, por lo que se ha tomado 360 elementos para modelar la interfase, es decir un elemento por grado. La malla será más fina conforme nos acerquemos a las interfases y más basta en las posiciones más lejanas a estas. La Figura 7-3 muestra la malla utilizada en el modelo, la cual tiene 49788 elementos en la matriz y cada fibra contiene 3905 elementos. El estudio de la sensibilidad a la malla en este modelo no se ha llevado por que este modelo es muy parecido al unifibra, además los resultados serán comparados con los obtenidos anteriormente con el modelo en BEM, por lo que con esta comparación podemos saber si los resultados obtenidos con esta malla son correctos.
E
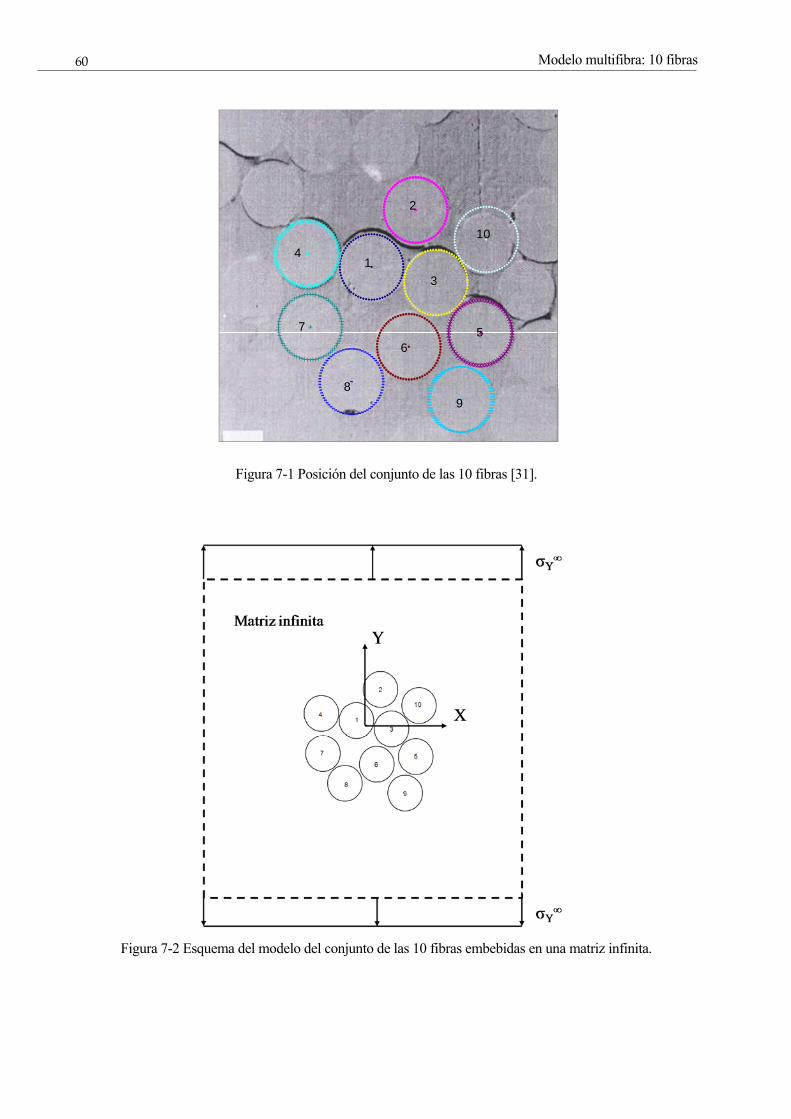
Modelo multifibra: 10 fibras
60
Figura 7-1 Posición del conjunto de las 10 fibras [31].
Figura 7-2 Esquema del modelo del conjunto de las 10 fibras embebidas en una matriz infinita.
1
2
3
4
56
7
89
10
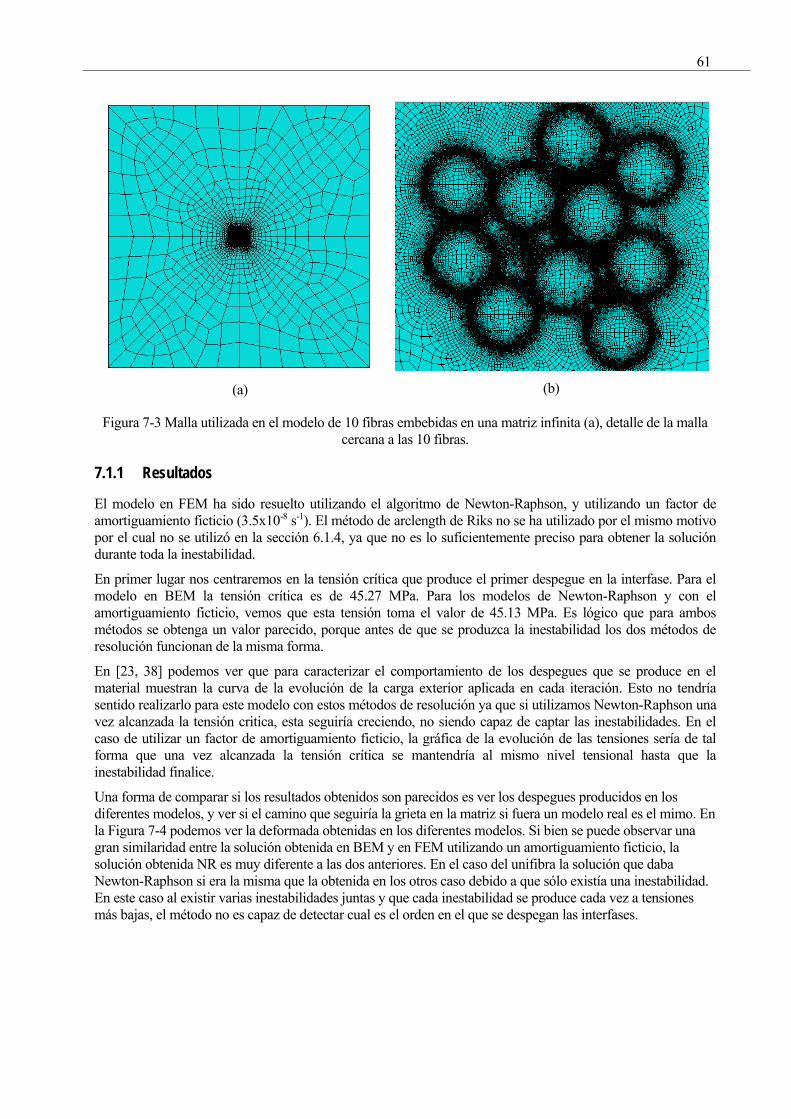
61
(a)
(b)
Figura 7-3 Malla utilizada en el modelo de 10 fibras embebidas en una matriz infinita (a), detalle de la malla cercana a las 10 fibras.
7.1.1 Resultados
El modelo en FEM ha sido resuelto utilizando el algoritmo de Newton-Raphson, y utilizando un factor de amortiguamiento ficticio (3.5x10-8 s-1). El método de arclength de Riks no se ha utilizado por el mismo motivo por el cual no se utilizó en la sección 6.1.4, ya que no es lo suficientemente preciso para obtener la solución durante toda la inestabilidad.
En primer lugar nos centraremos en la tensión crítica que produce el primer despegue en la interfase. Para el modelo en BEM la tensión crítica es de 45.27 MPa. Para los modelos de Newton-Raphson y con el amortiguamiento ficticio, vemos que esta tensión toma el valor de 45.13 MPa. Es lógico que para ambos métodos se obtenga un valor parecido, porque antes de que se produzca la inestabilidad los dos métodos de resolución funcionan de la misma forma.
En [23, 38] podemos ver que para caracterizar el comportamiento de los despegues que se produce en el material muestran la curva de la evolución de la carga exterior aplicada en cada iteración. Esto no tendría sentido realizarlo para este modelo con estos métodos de resolución ya que si utilizamos Newton-Raphson una vez alcanzada la tensión critica, esta seguiría creciendo, no siendo capaz de captar las inestabilidades. En el caso de utilizar un factor de amortiguamiento ficticio, la gráfica de la evolución de las tensiones sería de tal forma que una vez alcanzada la tensión crítica se mantendría al mismo nivel tensional hasta que la inestabilidad finalice.
Una forma de comparar si los resultados obtenidos son parecidos es ver los despegues producidos en los diferentes modelos, y ver si el camino que seguiría la grieta en la matriz si fuera un modelo real es el mimo. En la Figura 7-4 podemos ver la deformada obtenidas en los diferentes modelos. Si bien se puede observar una gran similaridad entre la solución obtenida en BEM y en FEM utilizando un amortiguamiento ficticio, la solución obtenida NR es muy diferente a las dos anteriores. En el caso del unifibra la solución que daba Newton-Raphson si era la misma que la obtenida en los otros caso debido a que sólo existía una inestabilidad. En este caso al existir varias inestabilidades juntas y que cada inestabilidad se produce cada vez a tensiones más bajas, el método no es capaz de detectar cual es el orden en el que se despegan las interfases.
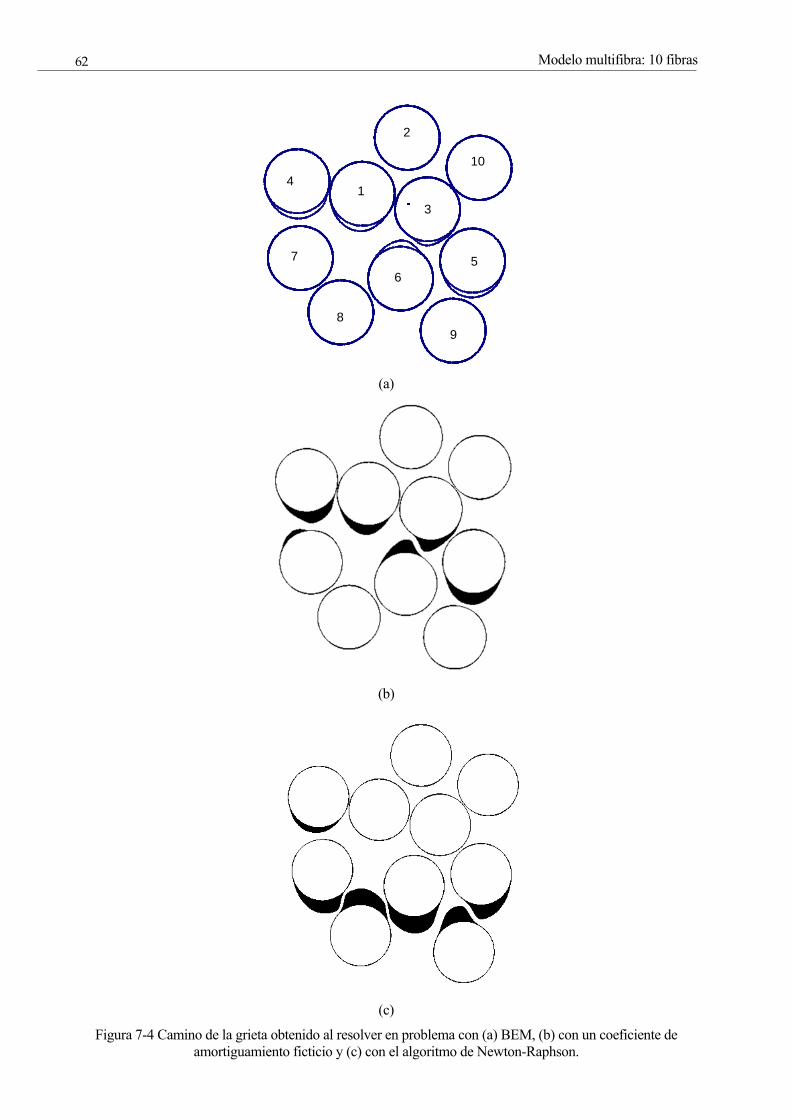
Modelo multifibra: 10 fibras
62
(a)
(b)
(c)
Figura 7-4 Camino de la grieta obtenido al resolver en problema con (a) BEM, (b) con un coeficiente de amortiguamiento ficticio y (c) con el algoritmo de Newton-Raphson.
1
2
3
4
56
7
89
10
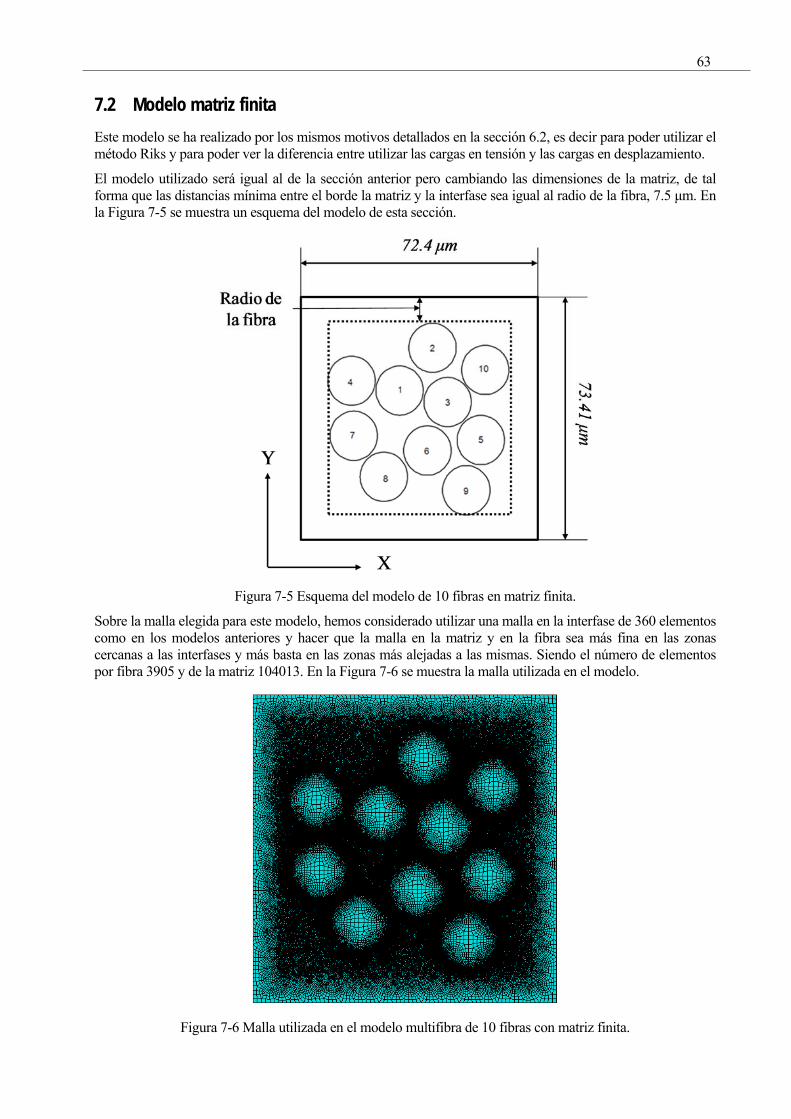
63
7.2 Modelo matriz finita
Este modelo se ha realizado por los mismos motivos detallados en la sección 6.2, es decir para poder utilizar el método Riks y para poder ver la diferencia entre utilizar las cargas en tensión y las cargas en desplazamiento.
El modelo utilizado será igual al de la sección anterior pero cambiando las dimensiones de la matriz, de tal forma que las distancias mínima entre el borde la matriz y la interfase sea igual al radio de la fibra, 7.5 μm. En la Figura 7-5 se muestra un esquema del modelo de esta sección.
Figura 7-5 Esquema del modelo de 10 fibras en matriz finita.
Sobre la malla elegida para este modelo, hemos considerado utilizar una malla en la interfase de 360 elementos como en los modelos anteriores y hacer que la malla en la matriz y en la fibra sea más fina en las zonas cercanas a las interfases y más basta en las zonas más alejadas a las mismas. Siendo el número de elementos por fibra 3905 y de la matriz 104013. En la Figura 7-6 se muestra la malla utilizada en el modelo.
Figura 7-6 Malla utilizada en el modelo multifibra de 10 fibras con matriz finita.
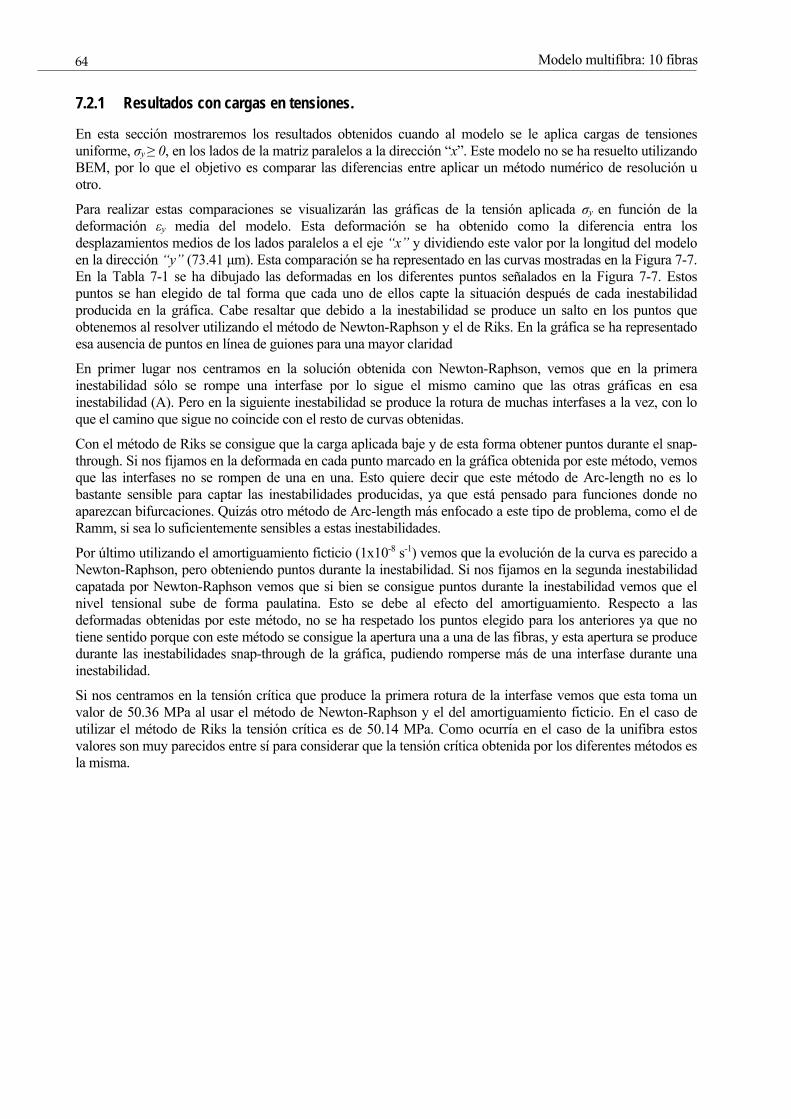
Modelo multifibra: 10 fibras
64
7.2.1 Resultados con cargas en tensiones.
En esta sección mostraremos los resultados obtenidos cuando al modelo se le aplica cargas de tensiones uniforme, σy ≥ 0, en los lados de la matriz paralelos a la dirección “x”. Este modelo no se ha resuelto utilizando BEM, por lo que el objetivo es comparar las diferencias entre aplicar un método numérico de resolución u otro.
Para realizar estas comparaciones se visualizarán las gráficas de la tensión aplicada σy en función de la deformación εy media del modelo. Esta deformación se ha obtenido como la diferencia entra los desplazamientos medios de los lados paralelos a el eje “x” y dividiendo este valor por la longitud del modelo en la dirección “y” (73.41 μm). Esta comparación se ha representado en las curvas mostradas en la Figura 7-7. En la Tabla 7-1 se ha dibujado las deformadas en los diferentes puntos señalados en la Figura 7-7. Estos puntos se han elegido de tal forma que cada uno de ellos capte la situación después de cada inestabilidad producida en la gráfica. Cabe resaltar que debido a la inestabilidad se produce un salto en los puntos que obtenemos al resolver utilizando el método de Newton-Raphson y el de Riks. En la gráfica se ha representado esa ausencia de puntos en línea de guiones para una mayor claridad
En primer lugar nos centramos en la solución obtenida con Newton-Raphson, vemos que en la primera inestabilidad sólo se rompe una interfase por lo sigue el mismo camino que las otras gráficas en esa inestabilidad (A). Pero en la siguiente inestabilidad se produce la rotura de muchas interfases a la vez, con lo que el camino que sigue no coincide con el resto de curvas obtenidas.
Con el método de Riks se consigue que la carga aplicada baje y de esta forma obtener puntos durante el snap-through. Si nos fijamos en la deformada en cada punto marcado en la gráfica obtenida por este método, vemos que las interfases no se rompen de una en una. Esto quiere decir que este método de Arc-length no es lo bastante sensible para captar las inestabilidades producidas, ya que está pensado para funciones donde no aparezcan bifurcaciones. Quizás otro método de Arc-length más enfocado a este tipo de problema, como el de Ramm, si sea lo suficientemente sensibles a estas inestabilidades.
Por último utilizando el amortiguamiento ficticio (1x10-8 s-1) vemos que la evolución de la curva es parecido a Newton-Raphson, pero obteniendo puntos durante la inestabilidad. Si nos fijamos en la segunda inestabilidad capatada por Newton-Raphson vemos que si bien se consigue puntos durante la inestabilidad vemos que el nivel tensional sube de forma paulatina. Esto se debe al efecto del amortiguamiento. Respecto a las deformadas obtenidas por este método, no se ha respetado los puntos elegido para los anteriores ya que no tiene sentido porque con este método se consigue la apertura una a una de las fibras, y esta apertura se produce durante las inestabilidades snap-through de la gráfica, pudiendo romperse más de una interfase durante una inestabilidad.
Si nos centramos en la tensión crítica que produce la primera rotura de la interfase vemos que esta toma un valor de 50.36 MPa al usar el método de Newton-Raphson y el del amortiguamiento ficticio. En el caso de utilizar el método de Riks la tensión crítica es de 50.14 MPa. Como ocurría en el caso de la unifibra estos valores son muy parecidos entre sí para considerar que la tensión crítica obtenida por los diferentes métodos es la misma.
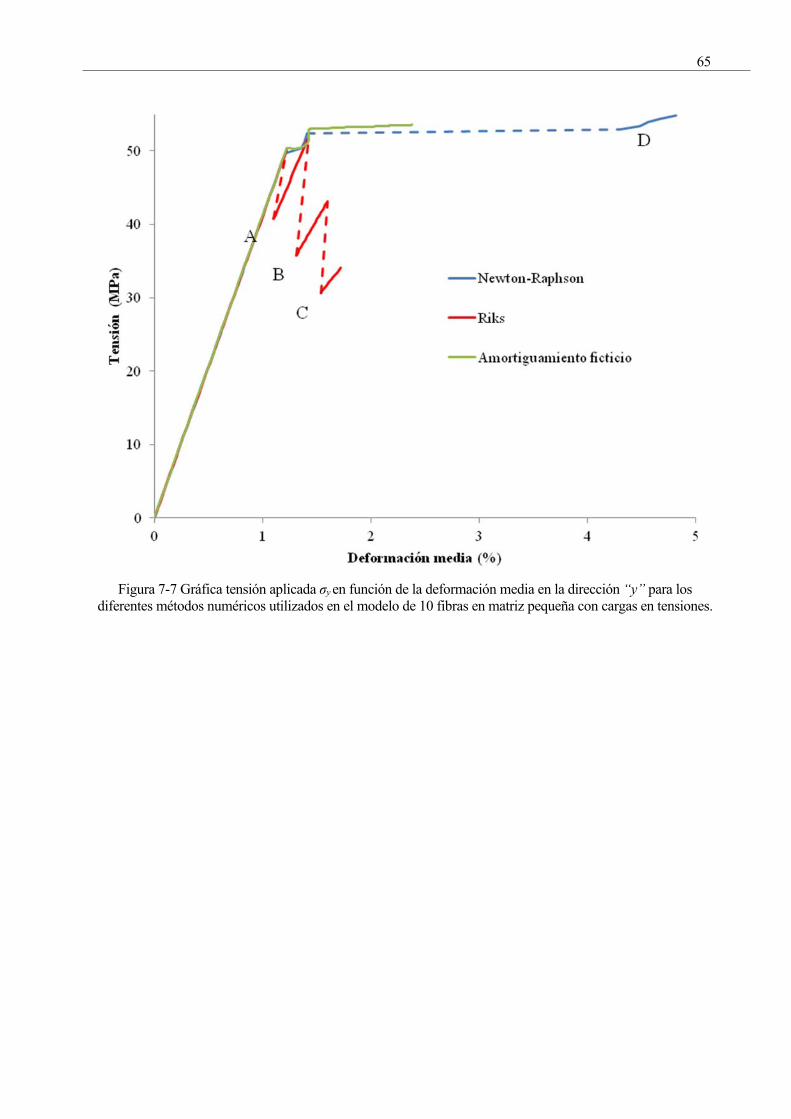
65
Figura 7-7 Gráfica tensión aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 10 fibras en matriz pequeña con cargas en tensiones.
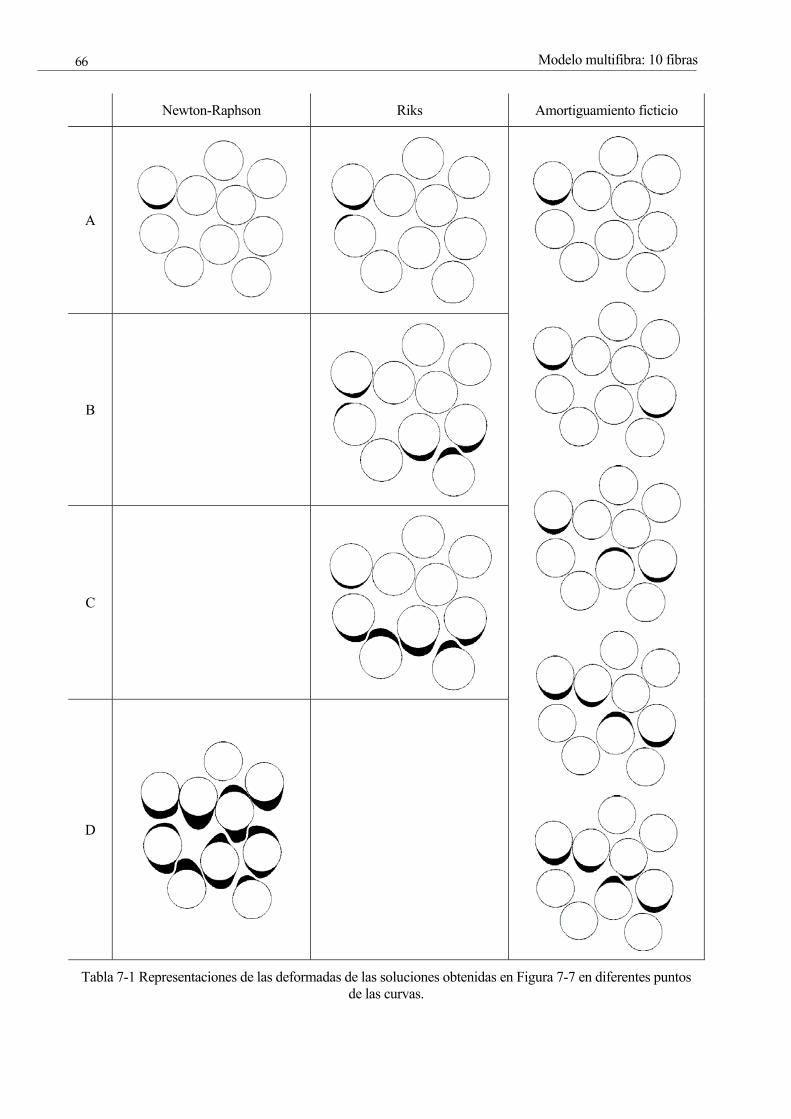
Modelo multifibra: 10 fibras
66
Newton-Raphson Riks Amortiguamiento ficticio
A
B
C
D
Tabla 7-1 Representaciones de las deformadas de las soluciones obtenidas en Figura 7-7 en diferentes puntos de las curvas.
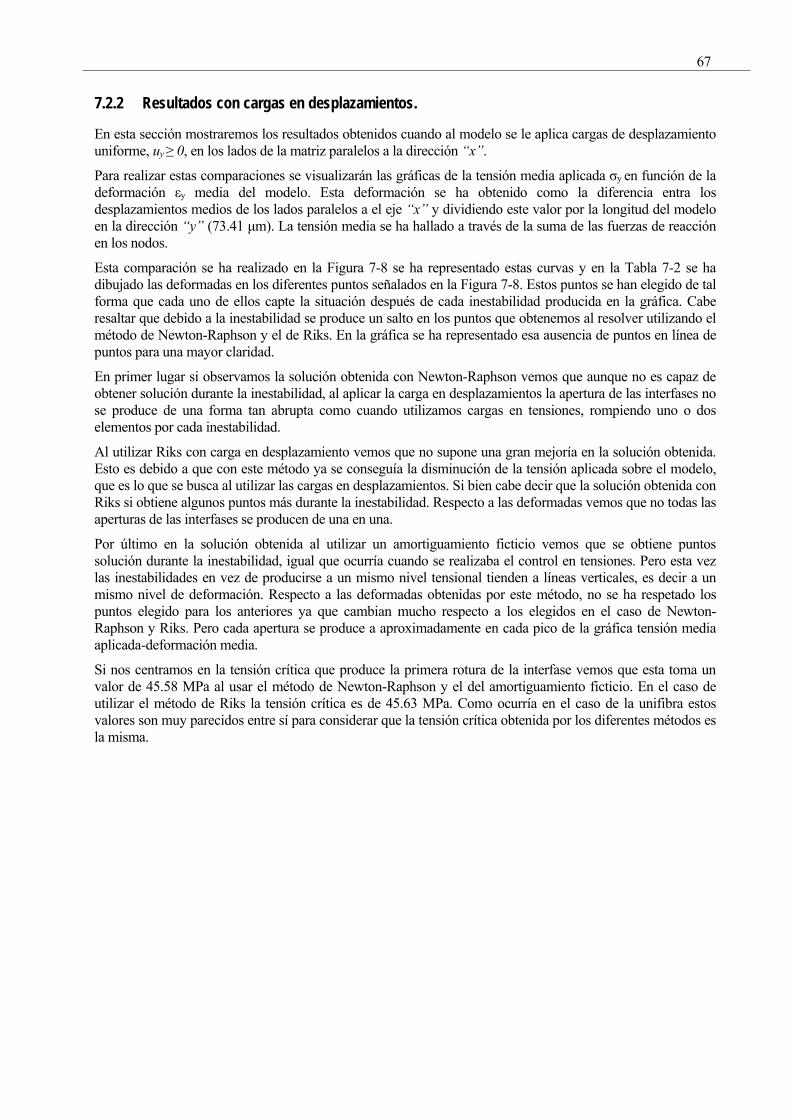
67
7.2.2 Resultados con cargas en desplazamientos.
En esta sección mostraremos los resultados obtenidos cuando al modelo se le aplica cargas de desplazamiento uniforme, uy ≥ 0, en los lados de la matriz paralelos a la dirección “x”.
Para realizar estas comparaciones se visualizarán las gráficas de la tensión media aplicada σy en función de la deformación εy media del modelo. Esta deformación se ha obtenido como la diferencia entra los desplazamientos medios de los lados paralelos a el eje “x” y dividiendo este valor por la longitud del modelo en la dirección “y” (73.41 μm). La tensión media se ha hallado a través de la suma de las fuerzas de reacción en los nodos.
Esta comparación se ha realizado en la Figura 7-8 se ha representado estas curvas y en la Tabla 7-2 se ha dibujado las deformadas en los diferentes puntos señalados en la Figura 7-8. Estos puntos se han elegido de tal forma que cada uno de ellos capte la situación después de cada inestabilidad producida en la gráfica. Cabe resaltar que debido a la inestabilidad se produce un salto en los puntos que obtenemos al resolver utilizando el método de Newton-Raphson y el de Riks. En la gráfica se ha representado esa ausencia de puntos en línea de puntos para una mayor claridad.
En primer lugar si observamos la solución obtenida con Newton-Raphson vemos que aunque no es capaz de obtener solución durante la inestabilidad, al aplicar la carga en desplazamientos la apertura de las interfases no se produce de una forma tan abrupta como cuando utilizamos cargas en tensiones, rompiendo uno o dos elementos por cada inestabilidad.
Al utilizar Riks con carga en desplazamiento vemos que no supone una gran mejoría en la solución obtenida. Esto es debido a que con este método ya se conseguía la disminución de la tensión aplicada sobre el modelo, que es lo que se busca al utilizar las cargas en desplazamientos. Si bien cabe decir que la solución obtenida con Riks si obtiene algunos puntos más durante la inestabilidad. Respecto a las deformadas vemos que no todas las aperturas de las interfases se producen de una en una.
Por último en la solución obtenida al utilizar un amortiguamiento ficticio vemos que se obtiene puntos solución durante la inestabilidad, igual que ocurría cuando se realizaba el control en tensiones. Pero esta vez las inestabilidades en vez de producirse a un mismo nivel tensional tienden a líneas verticales, es decir a un mismo nivel de deformación. Respecto a las deformadas obtenidas por este método, no se ha respetado los puntos elegido para los anteriores ya que cambian mucho respecto a los elegidos en el caso de Newton-Raphson y Riks. Pero cada apertura se produce a aproximadamente en cada pico de la gráfica tensión media aplicada-deformación media.
Si nos centramos en la tensión crítica que produce la primera rotura de la interfase vemos que esta toma un valor de 45.58 MPa al usar el método de Newton-Raphson y el del amortiguamiento ficticio. En el caso de utilizar el método de Riks la tensión crítica es de 45.63 MPa. Como ocurría en el caso de la unifibra estos valores son muy parecidos entre sí para considerar que la tensión crítica obtenida por los diferentes métodos es la misma.
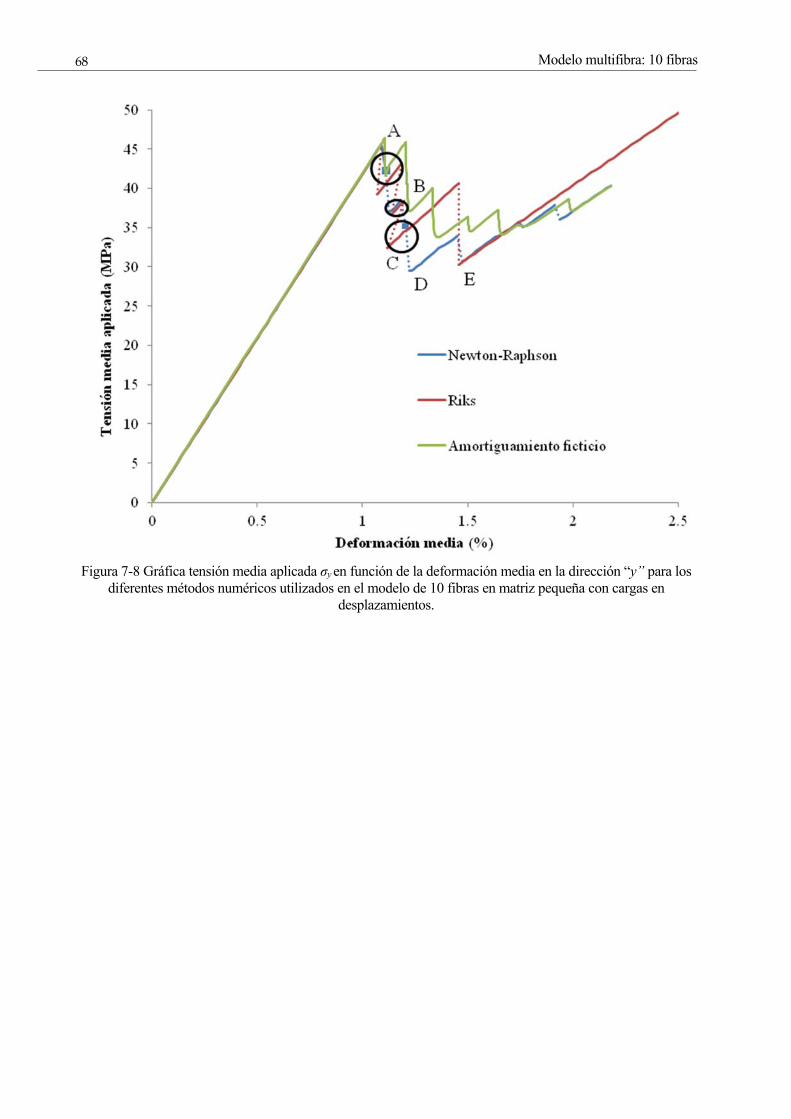
Modelo multifibra: 10 fibras
68
Figura 7-8 Gráfica tensión media aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 10 fibras en matriz pequeña con cargas en
desplazamientos.
69
Newton-Raphson Riks Amortiguamiento ficticio
A
B
C
D
E
Tabla 7-2 Representaciones de las deformadas de las soluciones obtenidas en Figura 7-8 en diferentes puntos de las curvas.
70
8 MODELO MULTIFIBRA: 100 FIBRAS
urante este capítulo se desarrollarán modelos multifibra de 100 fibras, tanto en matriz infinita como en matriz finita. Este modelo se ha obtenido a través de una fotografía realizada a un laminado fibra de carbono-epoxi. Si bien las propiedades que tomaremos para este modelo serán de las de fibra de vidrio-
epoxi ya de esta forma poder hacer una comparación global de los modelos realizados en este proyecto.
La distribución seguida en este capítulo es la siguiente. En la sección 8.1 se presenta el modelo de las 100 fibras inmersas en una matriz infinita, mostrando los resultados obtenidos para este modelo en la subsección 8.1.1. El modelo de 100 fibras inmersas en una matriz finita es presentado en la sección 8.2, y los resultados obtenidos al aplicar cargas en tensiones y desplazamientos serán presentados en las subsecciones 8.2.1y 8.2.2 respectivamente.
8.1 Modelo matriz infinita
El modelo se ha realizado tomando la distribución de 100 fibras en una fotografía de un laminado carbono-epoxi y suponiendo que esta distribución de fibra se encuentra inmersa en una matriz con dimensiones muy superiores a la del grupo de fibras. Si bien la distribución se ha tomado de un laminado fibra de carbono-epoxi supondremos que sus propiedades mecánicas son las de la fibra de vidrio-epoxi. Además deberemos de escalar las fibras ya que las fibras de carbono tienen un radio de carbono es aproximadamente de 3.5 μm y la de fibra de vidrio es de 4.5 μm.
En la Figura 8-1 se muestra la fotografía donde se ha tomado la distribución de las fibras, así como las fibras que se han tomado para el modelo numérico. Para modelar una matriz infinita en ABAQUS, se ha hecho que las dimensiones de la matriz sea mucho mayores que la del conjunto de las 100 fibras, de esta forma se ha elegido una matriz de 1mmx1mm, pudiéndose aproximar el conjunto de 100 fibras por un cuadrado de 200μmx200μm.
Considerando el sistema coordenado cartesiana al (x,y,z), al modelo se le aplicará una carga σy en los lados paralelos al eje x. Las fibras serán de vidrio, el cuál esta caracterizado por las variables de la Tabla 6-1. La intefase se ha modelado como en el caso del problema unifibra, como una corona circular de radio interior 7.5 μm y de espesor 0.01 μm y con las características indicada en la Tabla 6-2. Las propiedades mecánicas de la matriz emularan al comportamiento del epoxi, cuyas características podemos encontrar en Tabla 6-1. El modelo se esquematiza en la Figura 8-2. Además en el modelo se debe de restringir los movimientos como sólido rígido, esto se ha realizado impidiendo los desplazamientos en la dirección x e y en el punto medio del lado paralelo a la dirección y que está situado más a la izquierda de la Figura 8-2, en el lado situado más a la derecha se impedirá el desplazamiento en la dirección y del punto medio.
D

71
Figura 8-1 Fotografía donde se han tomado la distribución de las 100 fibras, resaltando las fibras tomadas para el modelo realizado.
Figura 8-2 Esquema del modelo del conjunto de las 100 fibras inmersas en una matriz infinita
El modelo de ABAQUS se ha realizado dividiendo el modelo en la matriz, las cien fibras y las cien interfases. La malla que se ha tomado en este modelo está basado en el estudio de la sensibilidad de la malla en el caso unifibra, por lo que se ha tomado 360 elementos para modelar la interfase, es decir un elemento por grado. La malla será más fina conforme nos acerquemos a la interfase y más basta en las posiciones más lejanas a estas. La Figura 8-3 muestra la malla utilizada en el modelo, la cual tiene 1971122 elementos en la matriz y cada fibra contiene 3905 elementos. El estudio de la sensibilidad a la malla en este modelo no se ha llevado y se supondrá que los resultados obtenido en el modelo unifibra serán aplicable también a este modelo.
y
x
σY∞
σY∞
Matriz infinita
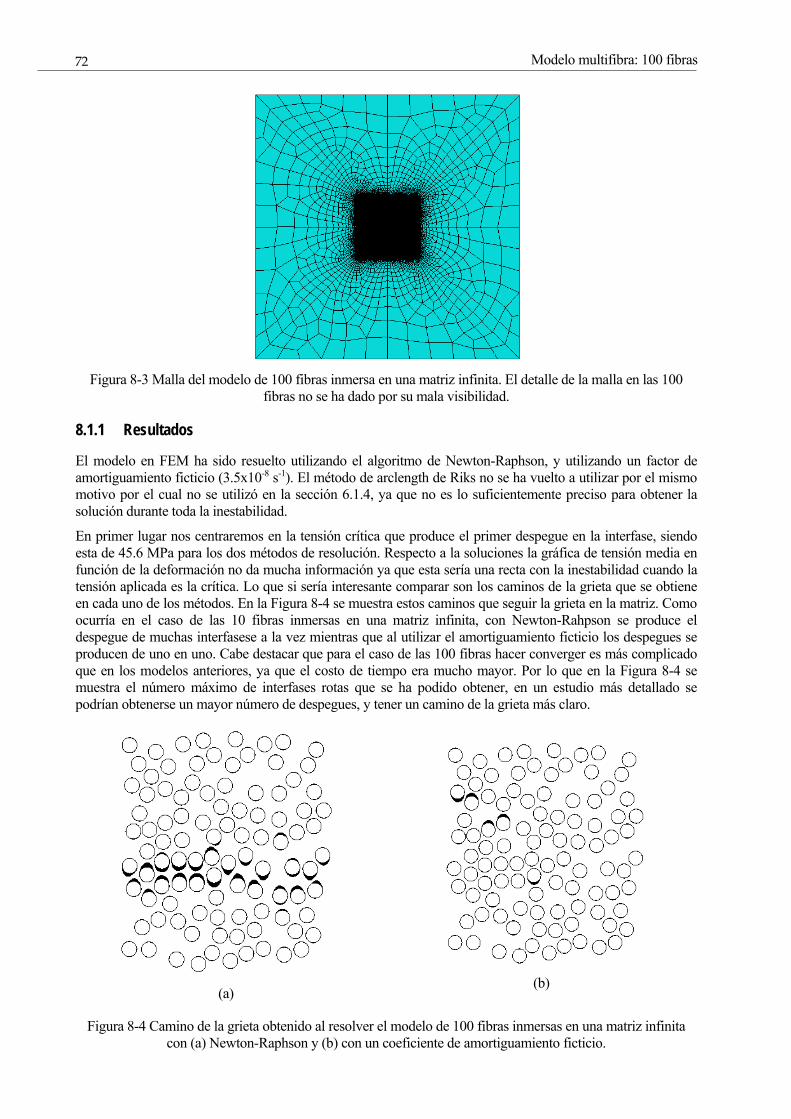
Modelo multifibra: 100 fibras
72
Figura 8-3 Malla del modelo de 100 fibras inmersa en una matriz infinita. El detalle de la malla en las 100 fibras no se ha dado por su mala visibilidad.
8.1.1 Resultados
El modelo en FEM ha sido resuelto utilizando el algoritmo de Newton-Raphson, y utilizando un factor de amortiguamiento ficticio (3.5x10-8 s-1). El método de arclength de Riks no se ha vuelto a utilizar por el mismo motivo por el cual no se utilizó en la sección 6.1.4, ya que no es lo suficientemente preciso para obtener la solución durante toda la inestabilidad.
En primer lugar nos centraremos en la tensión crítica que produce el primer despegue en la interfase, siendo esta de 45.6 MPa para los dos métodos de resolución. Respecto a la soluciones la gráfica de tensión media en función de la deformación no da mucha información ya que esta sería una recta con la inestabilidad cuando la tensión aplicada es la crítica. Lo que si sería interesante comparar son los caminos de la grieta que se obtiene en cada uno de los métodos. En la Figura 8-4 se muestra estos caminos que seguir la grieta en la matriz. Como ocurría en el caso de las 10 fibras inmersas en una matriz infinita, con Newton-Rahpson se produce el despegue de muchas interfasese a la vez mientras que al utilizar el amortiguamiento ficticio los despegues se producen de uno en uno. Cabe destacar que para el caso de las 100 fibras hacer converger es más complicado que en los modelos anteriores, ya que el costo de tiempo era mucho mayor. Por lo que en la Figura 8-4 se muestra el número máximo de interfases rotas que se ha podido obtener, en un estudio más detallado se podrían obtenerse un mayor número de despegues, y tener un camino de la grieta más claro.
(a)
(b)
Figura 8-4 Camino de la grieta obtenido al resolver el modelo de 100 fibras inmersas en una matriz infinita con (a) Newton-Raphson y (b) con un coeficiente de amortiguamiento ficticio.
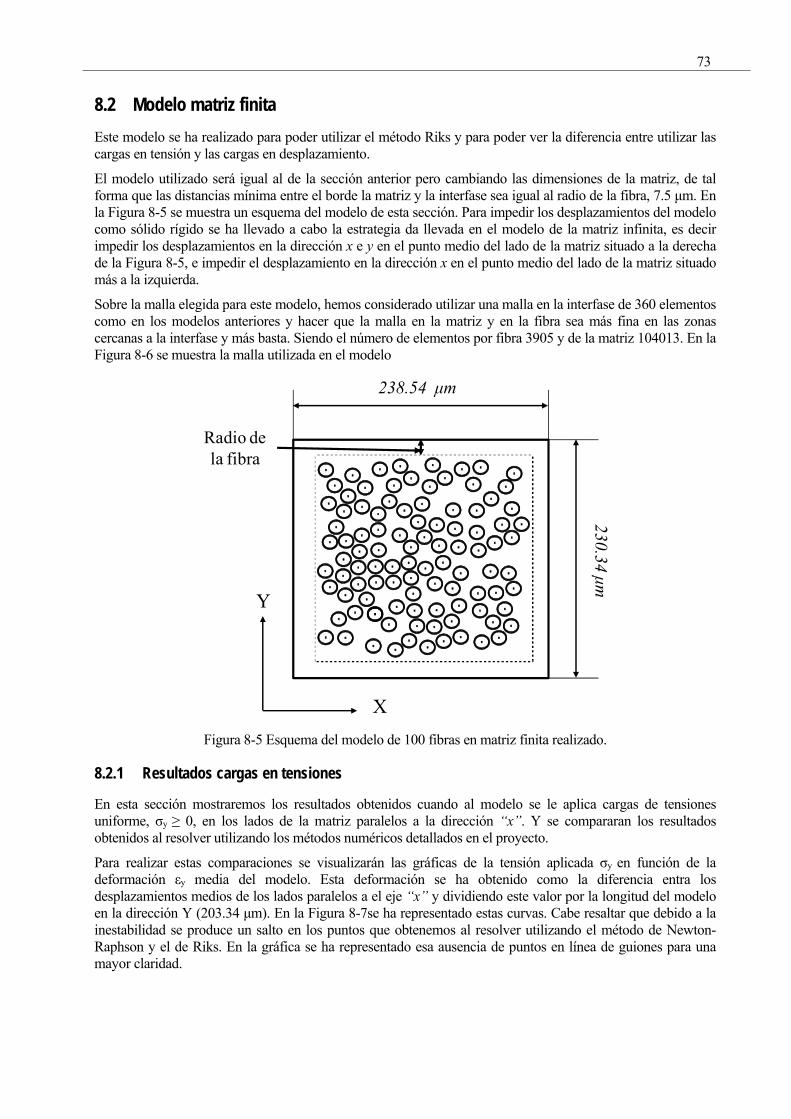
73
8.2 Modelo matriz finita
Este modelo se ha realizado para poder utilizar el método Riks y para poder ver la diferencia entre utilizar las cargas en tensión y las cargas en desplazamiento.
El modelo utilizado será igual al de la sección anterior pero cambiando las dimensiones de la matriz, de tal forma que las distancias mínima entre el borde la matriz y la interfase sea igual al radio de la fibra, 7.5 μm. En la Figura 8-5 se muestra un esquema del modelo de esta sección. Para impedir los desplazamientos del modelo como sólido rígido se ha llevado a cabo la estrategia da llevada en el modelo de la matriz infinita, es decir impedir los desplazamientos en la dirección x e y en el punto medio del lado de la matriz situado a la derecha de la Figura 8-5, e impedir el desplazamiento en la dirección x en el punto medio del lado de la matriz situado más a la izquierda.
Sobre la malla elegida para este modelo, hemos considerado utilizar una malla en la interfase de 360 elementos como en los modelos anteriores y hacer que la malla en la matriz y en la fibra sea más fina en las zonas cercanas a la interfase y más basta. Siendo el número de elementos por fibra 3905 y de la matriz 104013. En la Figura 8-6 se muestra la malla utilizada en el modelo
Figura 8-5 Esquema del modelo de 100 fibras en matriz finita realizado.
8.2.1 Resultados cargas en tensiones
En esta sección mostraremos los resultados obtenidos cuando al modelo se le aplica cargas de tensiones uniforme, σy ≥ 0, en los lados de la matriz paralelos a la dirección “x”. Y se compararan los resultados obtenidos al resolver utilizando los métodos numéricos detallados en el proyecto.
Para realizar estas comparaciones se visualizarán las gráficas de la tensión aplicada σy en función de la deformación εy media del modelo. Esta deformación se ha obtenido como la diferencia entra los desplazamientos medios de los lados paralelos a el eje “x” y dividiendo este valor por la longitud del modelo en la dirección Y (203.34 μm). En la Figura 8-7se ha representado estas curvas. Cabe resaltar que debido a la inestabilidad se produce un salto en los puntos que obtenemos al resolver utilizando el método de Newton-Raphson y el de Riks. En la gráfica se ha representado esa ausencia de puntos en línea de guiones para una mayor claridad.
Y
X
Radio de la fibra
230.34 μm
238.54 μm
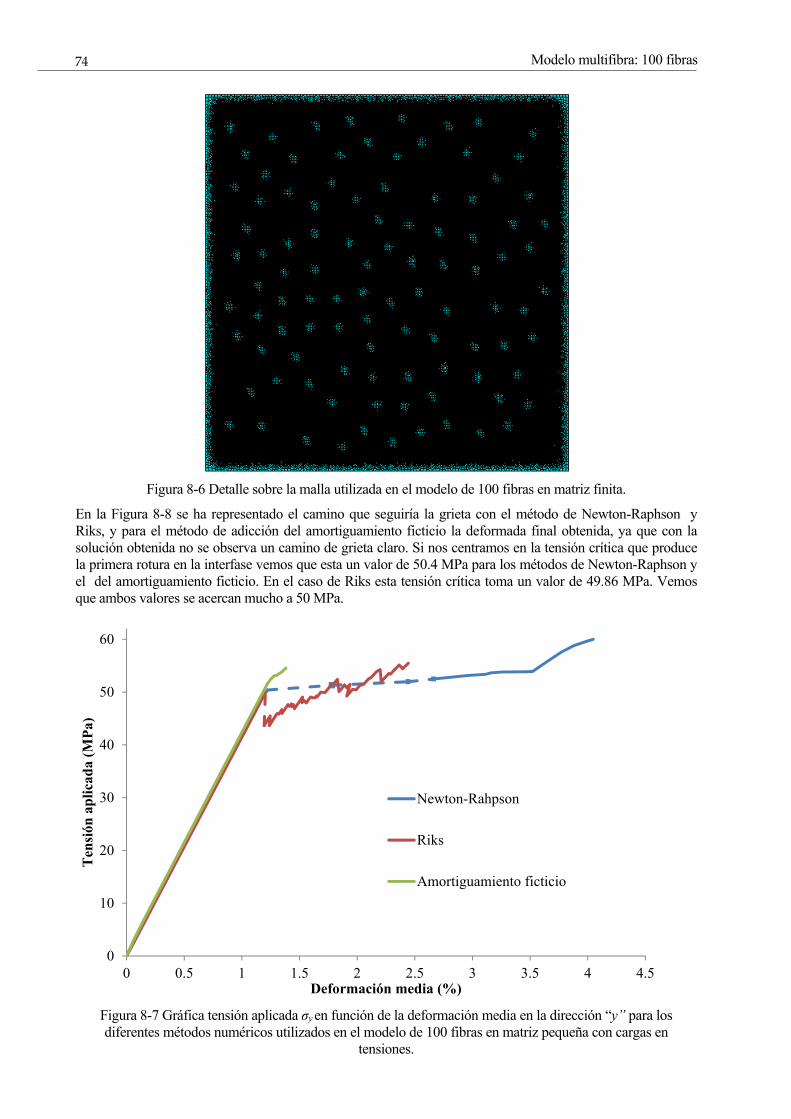
Modelo multifibra: 100 fibras
74
Figura 8-6 Detalle sobre la malla utilizada en el modelo de 100 fibras en matriz finita.
En la Figura 8-8 se ha representado el camino que seguiría la grieta con el método de Newton-Raphson y Riks, y para el método de adicción del amortiguamiento ficticio la deformada final obtenida, ya que con la solución obtenida no se observa un camino de grieta claro. Si nos centramos en la tensión crítica que produce la primera rotura en la interfase vemos que esta un valor de 50.4 MPa para los métodos de Newton-Raphson y el del amortiguamiento ficticio. En el caso de Riks esta tensión crítica toma un valor de 49.86 MPa. Vemos que ambos valores se acercan mucho a 50 MPa.
Figura 8-7 Gráfica tensión aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 100 fibras en matriz pequeña con cargas en
tensiones.
0
10
20
30
40
50
60
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
Ten
sión
ap
lica
da
(MP
a)
Deformación media (%)
Newton-Rahpson
Riks
Amortiguamiento ficticio
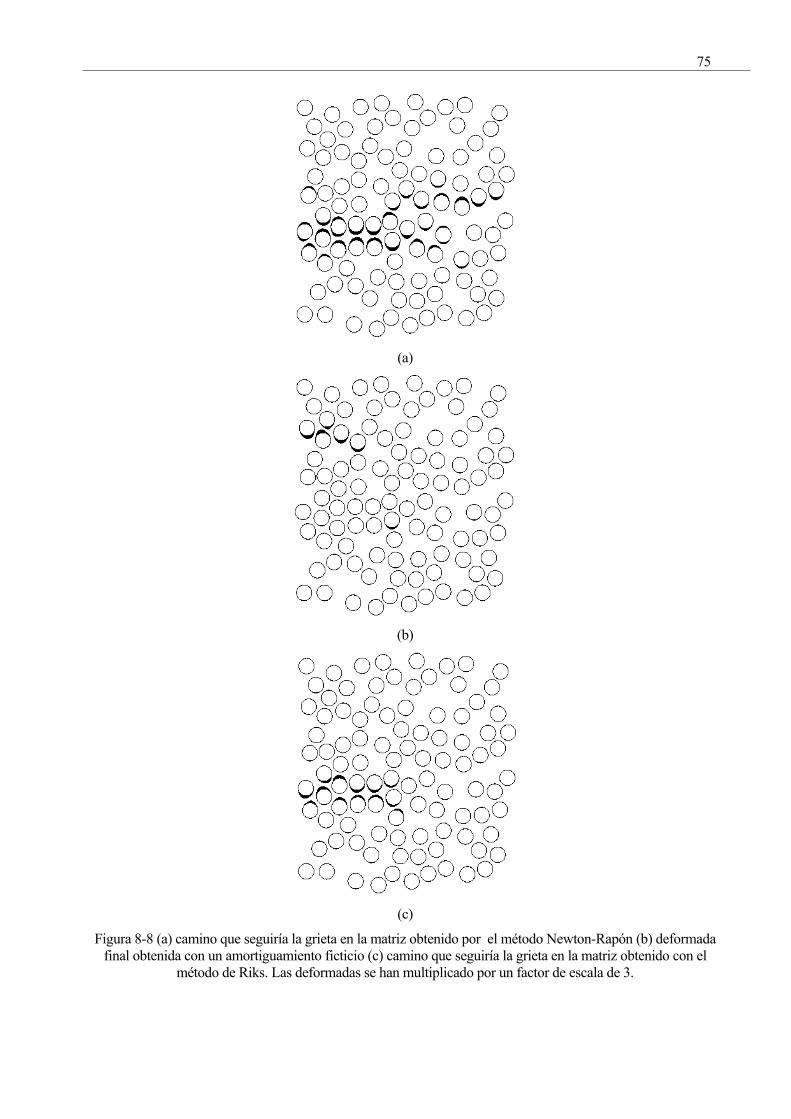
75
(a)
(b)
(c)
Figura 8-8 (a) camino que seguiría la grieta en la matriz obtenido por el método Newton-Rapón (b) deformada final obtenida con un amortiguamiento ficticio (c) camino que seguiría la grieta en la matriz obtenido con el
método de Riks. Las deformadas se han multiplicado por un factor de escala de 3.
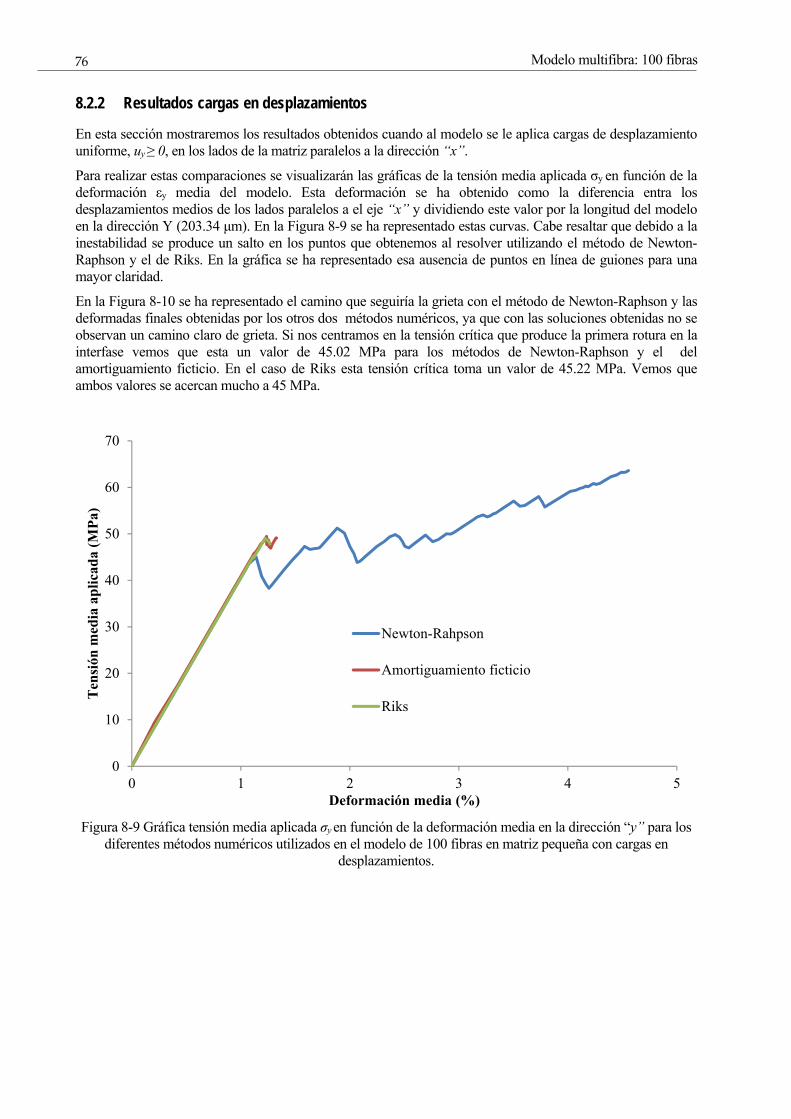
Modelo multifibra: 100 fibras
76
8.2.2 Resultados cargas en desplazamientos
En esta sección mostraremos los resultados obtenidos cuando al modelo se le aplica cargas de desplazamiento uniforme, uy ≥ 0, en los lados de la matriz paralelos a la dirección “x”.
Para realizar estas comparaciones se visualizarán las gráficas de la tensión media aplicada σy en función de la deformación εy media del modelo. Esta deformación se ha obtenido como la diferencia entra los desplazamientos medios de los lados paralelos a el eje “x” y dividiendo este valor por la longitud del modelo en la dirección Y (203.34 μm). En la Figura 8-9 se ha representado estas curvas. Cabe resaltar que debido a la inestabilidad se produce un salto en los puntos que obtenemos al resolver utilizando el método de Newton-Raphson y el de Riks. En la gráfica se ha representado esa ausencia de puntos en línea de guiones para una mayor claridad.
En la Figura 8-10 se ha representado el camino que seguiría la grieta con el método de Newton-Raphson y las deformadas finales obtenidas por los otros dos métodos numéricos, ya que con las soluciones obtenidas no se observan un camino claro de grieta. Si nos centramos en la tensión crítica que produce la primera rotura en la interfase vemos que esta un valor de 45.02 MPa para los métodos de Newton-Raphson y el del amortiguamiento ficticio. En el caso de Riks esta tensión crítica toma un valor de 45.22 MPa. Vemos que ambos valores se acercan mucho a 45 MPa.
Figura 8-9 Gráfica tensión media aplicada σy en función de la deformación media en la dirección “y” para los diferentes métodos numéricos utilizados en el modelo de 100 fibras en matriz pequeña con cargas en
desplazamientos.
0
10
20
30
40
50
60
70
0 1 2 3 4 5
Ten
sión
med
ia a
pli
cad
a (M
Pa)
Deformación media (%)
Newton-Rahpson
Amortiguamiento ficticio
Riks
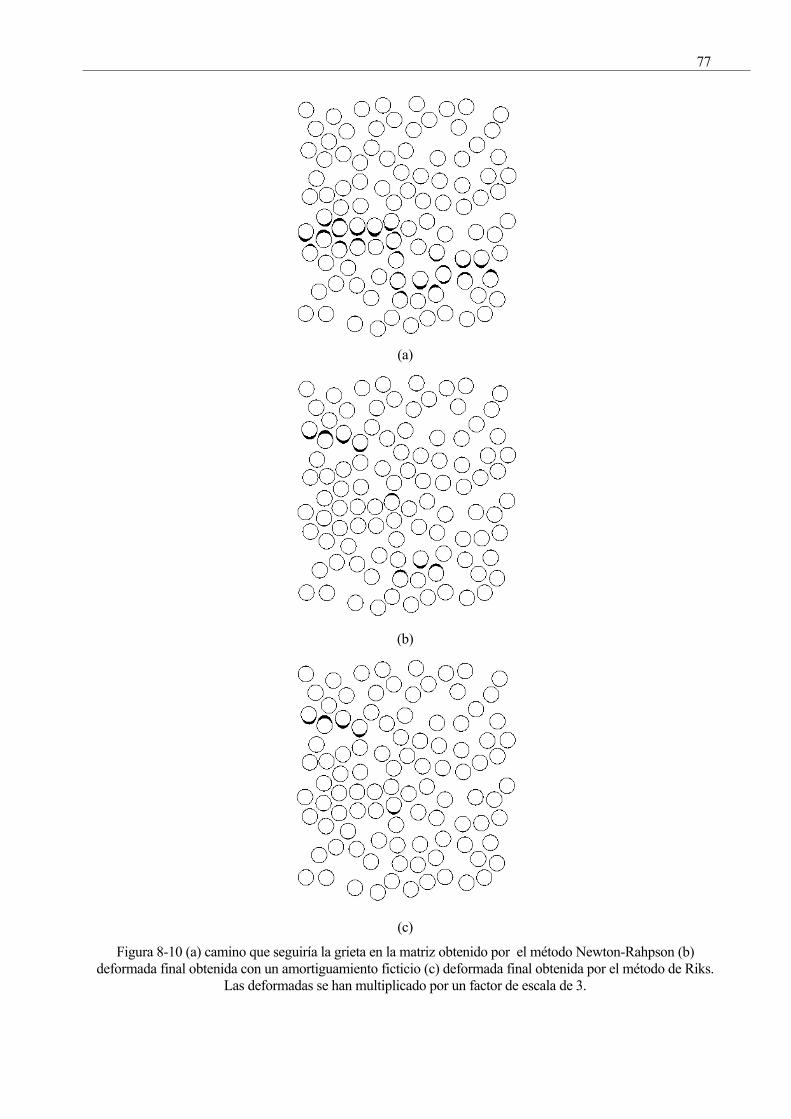
77
(a)
(b)
(c)
Figura 8-10 (a) camino que seguiría la grieta en la matriz obtenido por el método Newton-Rahpson (b) deformada final obtenida con un amortiguamiento ficticio (c) deformada final obtenida por el método de Riks.
Las deformadas se han multiplicado por un factor de escala de 3.

Modelo multifibra: 100 fibras
78
79
9 CONCLUSIONES Y TRABAJO FUTURO
ara una mayor claridad sobre las conclusiones que se pueden extrapolar de este proyecto, estas se enumerarán siguiendo los objetivos presentados en la sección 1.4. De esta forma, el proyecto se puede dividir en cuatro partes: desarrollo de una herramienta para la implementación del modelo LEBIM en
ABAQUS, validación de esta herramienta y comparación con los resultados previos en BEM, probar diferentes algoritmos numéricos de solución de problemas no lineales implementados en ABAQUS conjuntamente con la herramienta y por último resolver problemas que con BEM no es posible resolver.
El primero de estos objetivos, el de implementación, se ha realizado de forma exitosa, gracias a la programación en Fortran de una subrutina UMAT. La teoría del modelo de interfase utilizado (LEBIM) ha sido explicada en el capítulo 2, y los detalles de su implementación se han desarrollado en el capítulo 3. La subrutina UMAT se presenta al completo en el Anexo A.
Respeto a la validación de la herramienta y la comparación de los resultados, estas se han realizado a través de los modelos de DCB (capítulo 5), del modelo unifibra inmerso en una matriz infinita (sección 6.1) y del modelo de diez fibras inmerso en una matriz infinita (sección 7.1). En el caso DCB se puede concluir que los resultados obtenidos al usar la subrutina UMAT son suficientemente parecidos a los del BEM. Además una de las ventajas de la subrutina UMAT es que modela adecuadamente los dientes de sierra que aparecen en la curva experimental fuerza-desplazamiento. Consiguiendo una mejor aproximación con los experimentos, si se usa un paso de carga pequeño y un tamaño de elemento cercano al tamaño de la malla de refuerzo utilizada en el adhesivo (secciones 5.6 y 5.7). Se realizó también el estudio de una probeta no simétrica (sección 5.8) donde se pudo comprobar que el modelo implementado, LEBIM, funciona al propagarse la grieta en modo mixto de fractura.
En los otros dos modelos, las conclusiones no son tan claras y que entra en juego el método numérico de resolución utilizado. En los problemas de despegue de la interfase fibra-matriz modelados con LEBIM suelen aparecer fuertes inestabilidades, en el modelo BEM se solucionaron utilizando un método numérico de resolución desarrollado por el Grupo de Elasticidad y Resistencia de materiales, llamado el “linear sequential analysis”. Este método fue desarrollado para problemas donde existen inestabilidades y fuertes no-linealidades. En nuestro caso, al incluir la subrutina UMAT se utilizaron varios métodos implementados en ABAQUS (Newton-Raphson, amortiguamiento ficticio y Riks) los cuales han sido detallados en la sección 4.
En la sección 6 se ha estudiado el problema de una fibra inmersa en una matriz infinita con cargas de tensión e inmersa en una matriz finita con (control de) cargas de tensión y de desplazamientos. En los resultados obtenidos para el caso de la matriz infinita, al ser comparados con los obtenidos en BEM, vemos que la solución obtenida por Newton-Raphson no es capaz de obtener solución durante la inestabilidad que se produce, pero la tensión crítica que produce el despegue por ambos métodos coinciden. Si bien al utilizar un factor de amortiguamiento ficticio vemos que durante la inestabilidad si es capaz de obtener la solución, la solución obtenida no sigue la misma curva tensión-apertura de la interfase que la obtenida en BEM. En el caso de matriz finita vemos que podemos obtener más puntos de la curva durante la inestabilidad, utilizando cargas en desplazamiento en lugar de las cargas en tensiones.
En la sección 7 se ha estudiado un modelo de 10 fibras inmersas en una matriz infinita con cargas de tensión e inmersas en una matriz finita con cargas de tensión y de desplazamientos. La comparación con BEM se ha llevado a través del modelo de matriz infinita, en él observamos que la tensión crítica obtenida coincide para los modelos de elementos finitos (Newton-Raphson y amortiguamiento ficticio) con los de BEM, pero la deformada obtenida en BEM sólo coincide con la obtenida al utilizar un amortiguamiento ficticio. Esto se debe a que en la solución obtenida por Newton-Raphson se rompen varias fibras a la vez al alcanzar la tensión crítica, en cambio al utilizar el factor de amortiguamiento ficticio las roturas de las interfases se producen de una en una. Al utilizar la matriz finita observamos que podemos obtener más puntos de la curva durante la
P
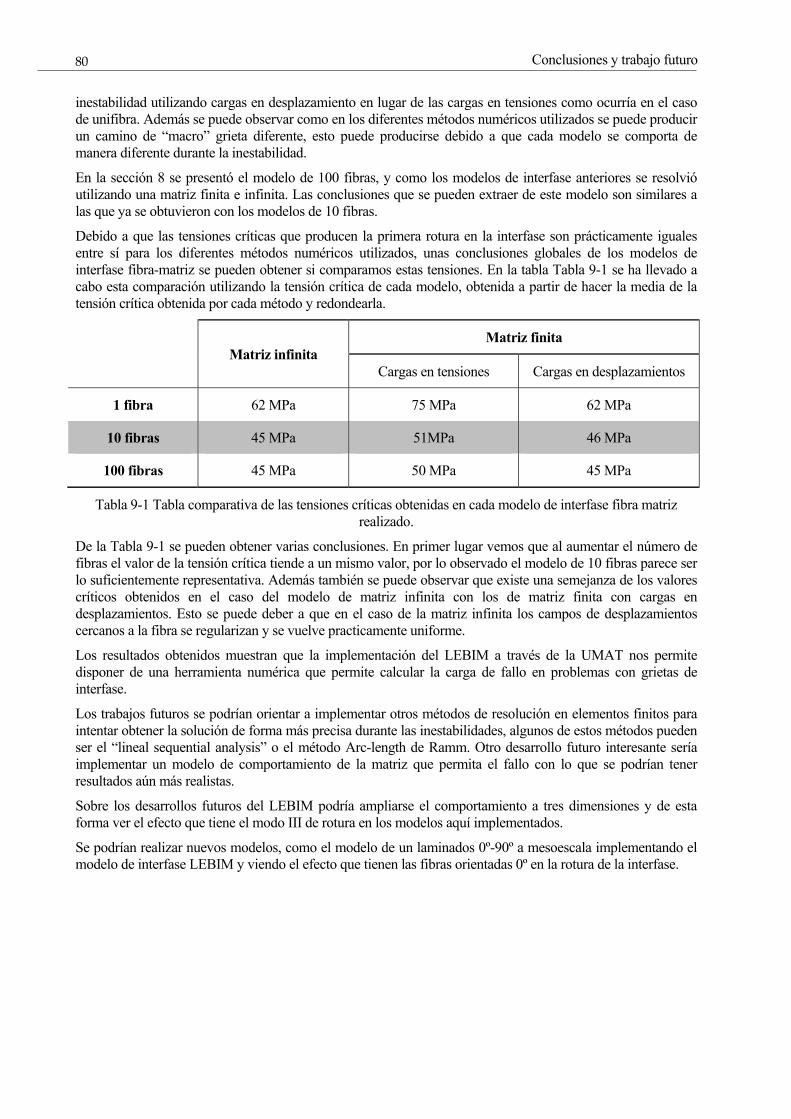
Conclusiones y trabajo futuro
80
inestabilidad utilizando cargas en desplazamiento en lugar de las cargas en tensiones como ocurría en el caso de unifibra. Además se puede observar como en los diferentes métodos numéricos utilizados se puede producir un camino de “macro” grieta diferente, esto puede producirse debido a que cada modelo se comporta de manera diferente durante la inestabilidad.
En la sección 8 se presentó el modelo de 100 fibras, y como los modelos de interfase anteriores se resolvió utilizando una matriz finita e infinita. Las conclusiones que se pueden extraer de este modelo son similares a las que ya se obtuvieron con los modelos de 10 fibras.
Debido a que las tensiones críticas que producen la primera rotura en la interfase son prácticamente iguales entre sí para los diferentes métodos numéricos utilizados, unas conclusiones globales de los modelos de interfase fibra-matriz se pueden obtener si comparamos estas tensiones. En la tabla Tabla 9-1 se ha llevado a cabo esta comparación utilizando la tensión crítica de cada modelo, obtenida a partir de hacer la media de la tensión crítica obtenida por cada método y redondearla.
Matriz infinita Matriz finita
Cargas en tensiones Cargas en desplazamientos
1 fibra 62 MPa 75 MPa 62 MPa
10 fibras 45 MPa 51MPa 46 MPa
100 fibras 45 MPa 50 MPa 45 MPa
Tabla 9-1 Tabla comparativa de las tensiones críticas obtenidas en cada modelo de interfase fibra matriz realizado.
De la Tabla 9-1 se pueden obtener varias conclusiones. En primer lugar vemos que al aumentar el número de fibras el valor de la tensión crítica tiende a un mismo valor, por lo observado el modelo de 10 fibras parece ser lo suficientemente representativa. Además también se puede observar que existe una semejanza de los valores críticos obtenidos en el caso del modelo de matriz infinita con los de matriz finita con cargas en desplazamientos. Esto se puede deber a que en el caso de la matriz infinita los campos de desplazamientos cercanos a la fibra se regularizan y se vuelve practicamente uniforme.
Los resultados obtenidos muestran que la implementación del LEBIM a través de la UMAT nos permite disponer de una herramienta numérica que permite calcular la carga de fallo en problemas con grietas de interfase.
Los trabajos futuros se podrían orientar a implementar otros métodos de resolución en elementos finitos para intentar obtener la solución de forma más precisa durante las inestabilidades, algunos de estos métodos pueden ser el “lineal sequential analysis” o el método Arc-length de Ramm. Otro desarrollo futuro interesante sería implementar un modelo de comportamiento de la matriz que permita el fallo con lo que se podrían tener resultados aún más realistas.
Sobre los desarrollos futuros del LEBIM podría ampliarse el comportamiento a tres dimensiones y de esta forma ver el efecto que tiene el modo III de rotura en los modelos aquí implementados.
Se podrían realizar nuevos modelos, como el modelo de un laminados 0º-90º a mesoescala implementando el modelo de interfase LEBIM y viendo el efecto que tienen las fibras orientadas 0º en la rotura de la interfase.
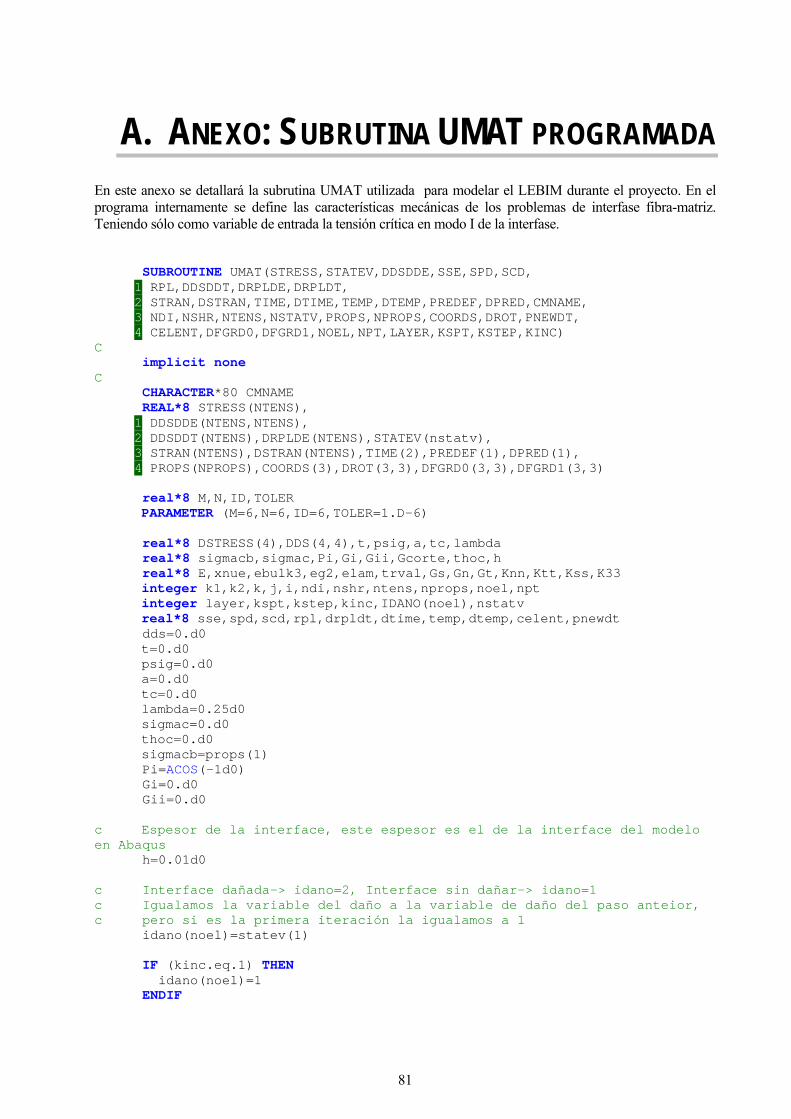
81
A. ANEXO: SUBRUTINA UMAT PROGRAMADA En este anexo se detallará la subrutina UMAT utilizada para modelar el LEBIM durante el proyecto. En el programa internamente se define las características mecánicas de los problemas de interfase fibra-matriz. Teniendo sólo como variable de entrada la tensión crítica en modo I de la interfase.
SUBROUTINE UMAT(STRESS,STATEV,DDSDDE,SSE,SPD,SCD, 1 RPL,DDSDDT,DRPLDE,DRPLDT, 2 STRAN,DSTRAN,TIME,DTIME,TEMP,DTEMP,PREDEF,DPRED,CMNAME, 3 NDI,NSHR,NTENS,NSTATV,PROPS,NPROPS,COORDS,DROT,PNEWDT, 4 CELENT,DFGRD0,DFGRD1,NOEL,NPT,LAYER,KSPT,KSTEP,KINC) C implicit none C CHARACTER*80 CMNAME REAL*8 STRESS(NTENS), 1 DDSDDE(NTENS,NTENS), 2 DDSDDT(NTENS),DRPLDE(NTENS),STATEV(nstatv), 3 STRAN(NTENS),DSTRAN(NTENS),TIME(2),PREDEF(1),DPRED(1), 4 PROPS(NPROPS),COORDS(3),DROT(3,3),DFGRD0(3,3),DFGRD1(3,3) real*8 M,N,ID,TOLER PARAMETER (M=6,N=6,ID=6,TOLER=1.D-6) real*8 DSTRESS(4),DDS(4,4),t,psig,a,tc,lambda real*8 sigmacb,sigmac,Pi,Gi,Gii,Gcorte,thoc,h real*8 E,xnue,ebulk3,eg2,elam,trval,Gs,Gn,Gt,Knn,Ktt,Kss,K33 integer k1,k2,k,j,i,ndi,nshr,ntens,nprops,noel,npt integer layer,kspt,kstep,kinc,IDANO(noel),nstatv real*8 sse,spd,scd,rpl,drpldt,dtime,temp,dtemp,celent,pnewdt dds=0.d0 t=0.d0 psig=0.d0 a=0.d0 tc=0.d0 lambda=0.25d0 sigmac=0.d0 thoc=0.d0 sigmacb=props(1) Pi=ACOS(-1d0) Gi=0.d0 Gii=0.d0 c Espesor de la interface, este espesor es el de la interface del modelo en Abaqus h=0.01d0 c Interface dañada-> idano=2, Interface sin dañar-> idano=1 c Igualamos la variable del daño a la variable de daño del paso anteior, c pero si es la primera iteración la igualamos a 1 idano(noel)=statev(1) IF (kinc.eq.1) THEN idano(noel)=1 ENDIF
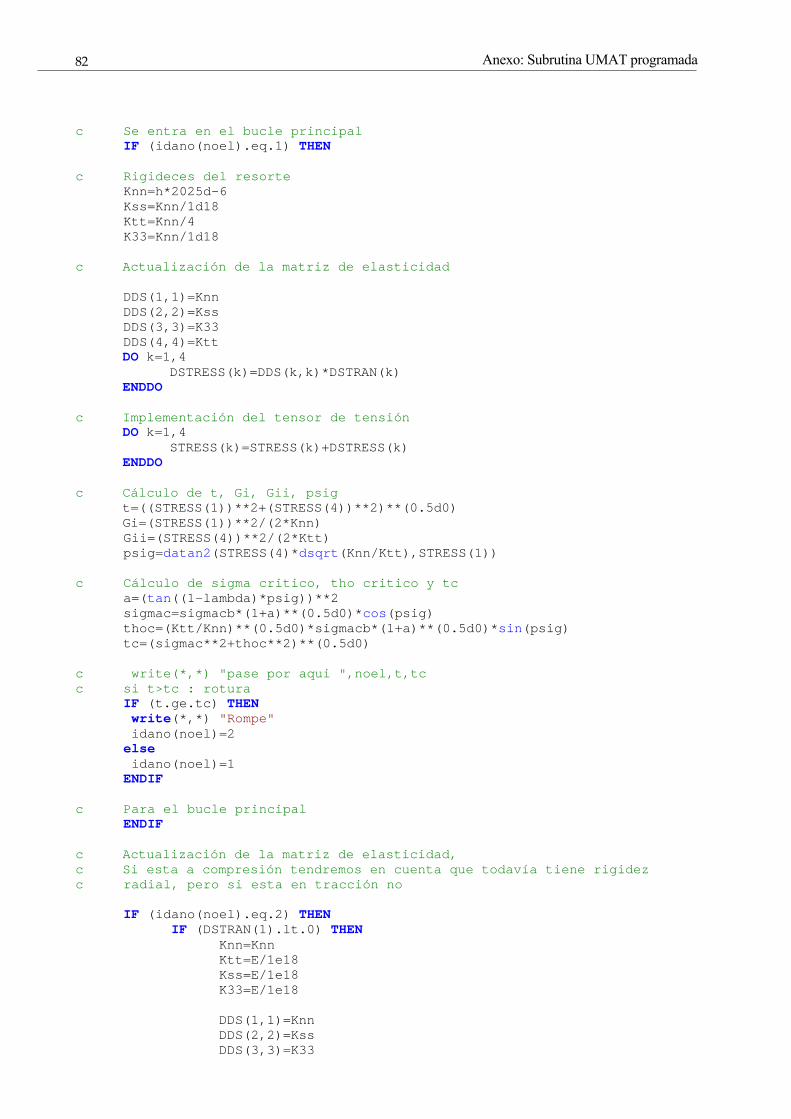
Anexo: Subrutina UMAT programada
82
c Se entra en el bucle principal IF (idano(noel).eq.1) THEN c Rigideces del resorte Knn=h*2025d-6 Kss=Knn/1d18 Ktt=Knn/4 K33=Knn/1d18 c Actualización de la matriz de elasticidad DDS(1,1)=Knn DDS(2,2)=Kss DDS(3,3)=K33 DDS(4,4)=Ktt DO k=1,4 DSTRESS(k)=DDS(k,k)*DSTRAN(k) ENDDO c Implementación del tensor de tensión DO k=1,4 STRESS(k)=STRESS(k)+DSTRESS(k) ENDDO c Cálculo de t, Gi, Gii, psig t=((STRESS(1))**2+(STRESS(4))**2)**(0.5d0) Gi=(STRESS(1))**2/(2*Knn) Gii=(STRESS(4))**2/(2*Ktt) psig=datan2(STRESS(4)*dsqrt(Knn/Ktt),STRESS(1)) c Cálculo de sigma critico, tho critico y tc a=(tan((1-lambda)*psig))**2 sigmac=sigmacb*(1+a)**(0.5d0)*cos(psig) thoc=(Ktt/Knn)**(0.5d0)*sigmacb*(1+a)**(0.5d0)*sin(psig) tc=(sigmac**2+thoc**2)**(0.5d0) c write(*,*) "pase por aqui ",noel,t,tc c si t>tc : rotura IF (t.ge.tc) THEN write(*,*) "Rompe" idano(noel)=2 else idano(noel)=1 ENDIF c Para el bucle principal ENDIF c Actualización de la matriz de elasticidad, c Si esta a compresión tendremos en cuenta que todavía tiene rigidez c radial, pero si esta en tracción no IF (idano(noel).eq.2) THEN IF (DSTRAN(1).lt.0) THEN Knn=Knn Ktt=E/1e18 Kss=E/1e18 K33=E/1e18 DDS(1,1)=Knn DDS(2,2)=Kss DDS(3,3)=K33
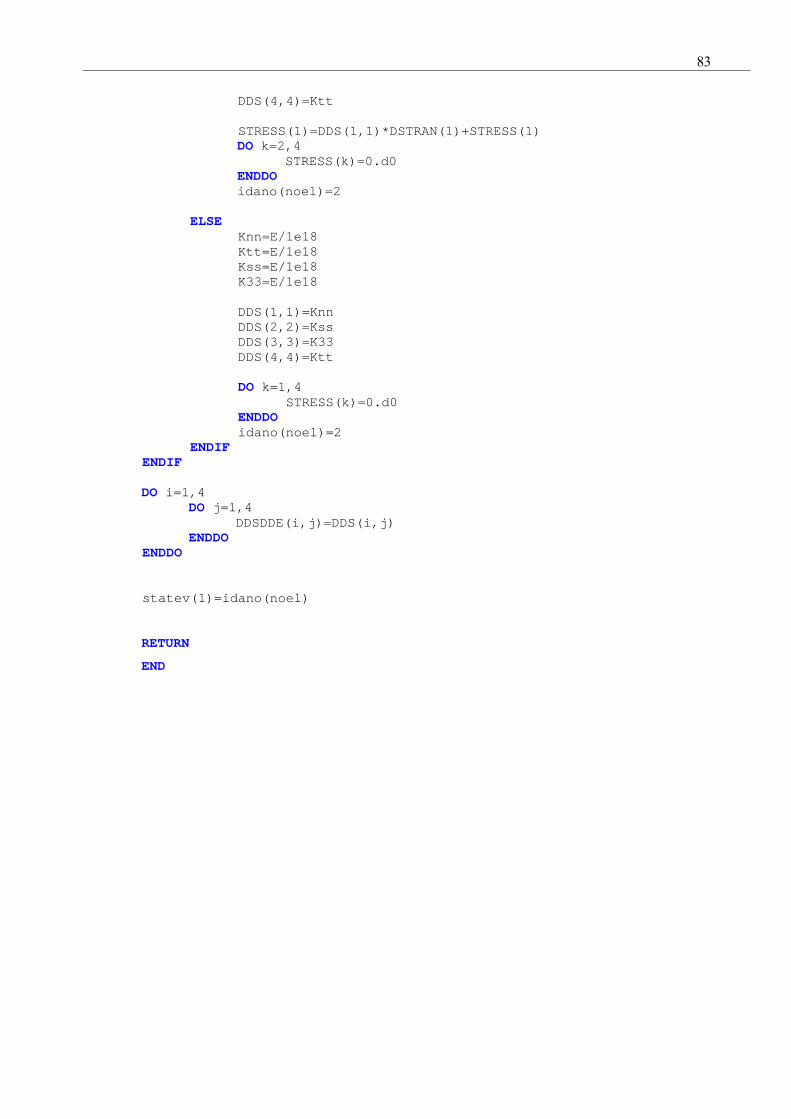
83
DDS(4,4)=Ktt STRESS(1)=DDS(1,1)*DSTRAN(1)+STRESS(1) DO k=2,4 STRESS(k)=0.d0 ENDDO idano(noel)=2 ELSE Knn=E/1e18 Ktt=E/1e18 Kss=E/1e18 K33=E/1e18 DDS(1,1)=Knn DDS(2,2)=Kss DDS(3,3)=K33 DDS(4,4)=Ktt DO k=1,4 STRESS(k)=0.d0 ENDDO idano(noel)=2 ENDIF ENDIF DO i=1,4 DO j=1,4 DDSDDE(i,j)=DDS(i,j) ENDDO ENDDO statev(1)=idano(noel) RETURN
END

85
86
REFERENCIAS [1] ABAQUS User Subroutines Reference Manual. V 6.11.
[2] Airbus. Carbon Fibre Reinforced Plastics. Determination of fracture toughness energy of bonded joints. Mode I. G1C. Issue 1. AITM 1-0053, 2006.
[3] L. Bank-Sills and D. Ashkenazi. A note on fracture criteria for interfase fracture. International Journal of Fractura 103:177-188, 2000
[4] GI. Barenblatt. The formation of equilibrium cracks during brittle fracture. General ideas and hypotheses. Axially-symmetric cracks. Journal of Applied Mathematics and Mechanics, 23:622-636, 1959
[5] Teoría General del Método de los Elementos Finitos, Francisco Beltrán 1998
[6] A. Caporale, F. Luciano, E. Sacco. Micromechanical analysis of interfacial debonding in unidirectional fiber-reinforced composites. Computers and Structures, 84:2200-2211, 2006.
[7] A. Carpinteri. Post-peak and post-bifucartion analysis on cohesive carck propagation. Engineering Fracture Mechanics, 32:265-278, 1989
[8] E. Correa. Micromechanical study of the "matriz failure" in fibre reinforced composite. PhD. Thesis, Universidad de Sevilla, 2008.
[9] F. Erdogan. Fracture mechanics of interfases, In: Damage and Failure of Interfases. Balkema Publishers: Rotterdam, 1997.
[10] A.G. Evans, M. Rühle, B.J. Dalgleish, and P.G. Charalambides. The fracture energy of bimitareial interfases. Metallurgical Transactions A, 21:2419-2429, 1990.
[11] M. Fafard, B. Massicotte. Geometrical interpretation of the Arc-Length method. Computers & Structures, 46:603-615, 1993
[12] Y. F. Gao, A. F. Bower. A simple techniguqe for avoidding convergence problems in finite element simulations of crack nucleation and growth on cohesives interfases. Modelling and Simulation in Materials Science and Engineering 12:453:463, 2004
[13] G. Geymonat, F. Krasucki, S.Lenci. Mathematical analysis of a bonded joint with a soft thin adhesive. Mathematics and Mechanics of Solids, 4:201-225, 1999.
[14] A. Hilleborg, M. Modeer, P.E. Petersson. Analysis of a crack formation and crack growth in concrete by fracture mechanics and finite elements. Cement and Concrete Research, 6:773-782, 1976.
[15] J.W. Hutchinson and Z.Suo. Mixed mode cracking in layered materials, volume 29 of Advances in Applied Mechanics. Academic Press: New York, 1992.
[16] ISO. Fibre-Reinforced plastic composites - Determination of model I interlaminar fracture toughness, Gic, for unidirectionally reinforced materials. ISO 15024, 2001.
[17] A. Klarbring. Derivation of a model of adhesively bonded joints by the asymptotic expansion method. International Journal of Engineering Science, 29:493-512, 1991.
[18] V.I. Kushch, S.V. Shmegea, L. Mishnaevsky Jr. Explicit modeling the progressive interfase damage in fibrous composite: Analytical vs. numerical approach. Composite Science and Technology, 71:989-997, 2011.
[19] V.I. Kushch, S.V. Shmegea, L. Mishnaevsky Jr. Meso cell model of fiber reinfoced composite: Interfase stress statistics and debonding paths. International Journal of Solids and Structures, 45:2758-2784, 2008
[20] V.I. Kushch, S.V. Shmegea, P. Brondsted, L. Mishnaevsky Jr. Numerical simulation of progressive debonding in fiber reinforced composite under transverse loading. International Journal of Engineering Science, 49:17-29, 2011
87
[21] F. Lebon and F. Zaittouni. Asymptotic modelling of interfases taking contact conditions into account: Asymptotic expansions and numerical implementation. International Journal of Engineering Science, 48:111-127, 2010
[22] S. Lenci. Analysis of a crack at a weak interface. International Journal of Fractura, 108:275-290, 2001
[23] V. Mantič, L. Távara, A. Blázquez, E. Graciani, and F. París. Crack onset and growth at fibre-matrix interfase under transverse tension using a liner elastic-brittle interfase model. ArXiv preprint. arXiv:1311.4596, 2013.
[24] V. Mantič. Interfase crack onset at a circular cylindrical inclusion under a remote transverse tension. Application of a coupled stress and energy criterion. International Journal of Solids and Structures, 28A:1287-1304, 2009.
[25] V. Mantic. Interfase crack onset at a circular cylindrical inclusion under a remote transverse tension. Application of a coupled of stress and energy criterion. International Journal of Solids and Structures, 46:1287-1304, 2009.
[26] M. Muñoz-Reja, L. Távara, V. Mantic, P. Cornetti. Nuevo modelo de inicio y propagación de grietas en la interfase de materiales compuestos fibrosos.
[27] JA. Nairn. Numerical implementation of imperfect interfases. Computational Materials Science, 40:525-536, 2007.
[28] A. Needleman. A continuum model for void nucleation by inclusion debonding. Journal of Applied Mechanics, 54:525-532, 1987.
[29] F. París, E. Correa and V. Mantic. Kinking of transverse interfase cracks between fiber and matrix. Journal of Applied Mechanics , 74:703:716, 2007.
[30] F.París, J. Cañas, J.C. Marín, A. Barroso. Introducción al análisis y diseño con materiales compuestos.
[31] F. París, E. Correa and J. Cañas. Micromechanical view of failure of the matrix in fibrous composite materials. Composite Science and Technology, 63:10141-1052, 2003.
[32] E. Ramm. Strategies for tracing the non-linear response near limit-points. In: Non-linear finite element analysis in structural mechanics. Proceeding European US Workshop. Springer: Berlin, 1981
[33] E. Riks. An incremental approach to the solution of snapping and buckling problems. International Journal of Solids and Structures, 15:529-551, 1979
[34] M. Romanowicz. Progressive failure analysis of unidirectional fiber-reinforced polymers with inhomogeneous interphase and randomly distribute fibers under transverse tensile loading. Composite Part A:appalied science and manufacturing, 41:1829-1838, 2010.
[35] Karl-Heinz Schwalbe, Ingo Scheider, Alferd Cornec. Guidelines for Applying Cohesive Models to the Damage Behaviour of Engineering Materials and Structure. Springer 2013.
[36] L. Távara. Damage initiation and propagation in composite materials. Boundary element analysis using weak interfase and cohesive zone models. PhD Thesis. Universidad de Sevilla: Sevilla 2010.
[37] L. Távara, V. Mantič, E. Graciani, F. París. BEM analysis of crack onset and propagation along fibre-matrix interfase under transverse tension using a linear elastic-brittle interfase model. Engineering Analysis with Boundary Elements, 35: 207-202, 2011.
[38] L. Távara, V. Mantič, E. Graciani, F. París. BEM modelling of interfase cracks in a group of fibres under biaxial transverse loads. Advances in Boundary Element Techniques XIV. 311-316, 2013.
[39] L. Távara, V. Mantič, E. Graciani, J. Cañas, and F. París. Analysis of a crack in a thin adhesive layer between orthotropic materials. An application to composite interlaminar fracture toughness test. Computer Modeling in Engineering and Sciences, 58:247-270, 2010.
[40] L. Távara, V. Mantic, E. Graciani. Instability analysis of the fibre-matrix debond onset and growth under transverse tension. European conference on composite materials ECCM16, 2014
[41] L. Távara, V. Mantic, A. Salvadori. Cohesive-zone-model formulation and implementation using the symmetric Galerkin boundary element method for homogeneous solids. Comput Mech 51:535-551,
Referencias
88
2013
[42] L. Távara, V.Mantic, E. Graciani, J. Cañas and F. Paris. Analysis of a Crack in a Thin Adhesive Layer between Orthotopic Materials: An application to Composite Interlaminar Fracture Toughness Test. CMES 58:247-270, 2010
[43] R.T. Tenchev, B.G. Falzon. A pseudo-transient solution strategy for the analysis of delaminating by means of interfase elements. Finite Elements in Analysis and Design, 43:698-708, 2006.
[44] H. Zhang, M.L. Ericson, J. Varna, and L.A. Berglund. Transverse single-fiber test for interfacial debonding in composites: 1. Experimental observations. Composites Part A: Applied Science and Manufacturing, 28A: 309-315, 1997.