proyecto entrenador_16f977A
88
UNIVERSIDAD TECNOLÓGICA DEL VALLE DE TOLUCA DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS EMPRESA: CONALEP Plantel Toluca NOMBRE DEL PROYECTO: “Tarjeta entrenadora de microcontrolador 16F877A” MEMORIA: QUE PARA OBTENER EL TÍTULO DE: INGENIERO EN MECATRÓNICA PRESENTA: Juan Carlos Bernal Calzada GENERACION SEPTIEMBRE 2011 - ABRIL 2013 LERMA, ESTADO DE MÉXICO, ABRIL DE 2013
-
Upload
juan-carlos-bernal-calzada -
Category
Documents
-
view
25 -
download
3
Transcript of proyecto entrenador_16f977A

UNIVERSIDAD TECNOLÓGICA DEL VALLE DE TOLUCA
DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS
EMPRESA:
CONALEP Plantel Toluca
NOMBRE DEL PROYECTO:
“Tarjeta entrenadora de microcontrolador 16F877A”
MEMORIA:
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN MECATRÓNICA
PRESENTA:
Juan Carlos Bernal Calzada
GENERACION
SEPTIEMBRE 2011 - ABRIL 2013
LERMA, ESTADO DE MÉXICO, ABRIL DE 2013

UNIVERSIDAD TECNOLÓGICA DEL VALLE DE TOLUCA
DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS
EMPRESA:
CONALEP Plantel Toluca
NOMBRE DEL PROYECTO:
“Tarjeta entrenadora de microcontrolador 16F877A”
MEMORIA:
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN MECATRÓNICA
PRESENTA:

INDICE GENERAL
CAPITULO 1: IDENTIFICACION DE LA NECESIDAD 5
1.1 Resumen…………………………………………….................... 5
1.2 Introducción……………………………………………………… 6
1.3 Antecedentes de la institución………………......................... 7
1.4Planteamiento de la problemática…………........................... 9
1.5Justificación……………………………………………………… 10 1.6Objetivos generales y específicos…………………………… 11
1.7 Hipótesis………………………………………………………… 12
CAPITULO 2: MARCO TEORICO
2.1 Historia de los Microcontroladores………………………… 13
2.1.1 Microcontrolador……………………………………………… 16
2.2 Los Fabricantes y sus Modelos de Microcontroladores…… 17
2.3 El catálogo actual de Familias de Microcontroladores PIC… 19
2.3.1 Novedades relevantes de los Microcontroladores………… 19 2.4 Microcontroladores PIC………………………………………… 20 2.4.1 ¿Por qué los Microcontroladores PIC de Microchip?......... 20 2.4.2 La influencia de los Microcontroladores en la vida diaria 21 2.5 Modulo PWM del PIC 16F877A……………………………………… 22 2.5.1 Periodo PWM………………………………………………… 22 2.5.2 Configuración del PWM…………………………………… 25CAPITULO 3: DESARROLLO TEÓRICO DE LA PROPUESTA DE MEJORA
26
3.1.2 Regulador de voltaje 7805………………………………… 27
3.1.3 Resistencia eléctrica……………………………………… 29
3.1.4 LCD 16x2 (display de cristal liquido)…………………… 30
3.1.5 Características principales de los módulos LCD……… 31

3.1.6 interfaz con microcontrolador a 8 bits…………………… 32
3.2 Micro programador usb……………………………………… 33
3.3 pickit2 – microchip…………………………………………… 36
3.3.2 cómo iniciar la lectura o escritura de un micro controlador 37
3.4 Interfaz Bluetooth RN 41-42………………………………… 40
3.4.1 Circuito de Interfaz Bluetooth…………………………….. 41
3.4.2 Arquitectura del Circuito Bluetooth………………………. 42
3.5.1 Detalles de Programación del Circuito Bluetooth……… 44
3.6.1 Dip trace…………………………………………………….. 46
3.7.1 Diseño de la tarjeta………………………………………… 48
3.8.1 Etapa de potencia ………………………………………… 49
3.9.1Elaboracion del PCB…………………………………… 50
3.9.2 Ruteo de las vías………………………………………. 51
3.10.1 Elaboración del circuito impreso…………………… 52
CAPITULO 4: APLICACIÓN Y VALIDACION DE LA PROPUESTA DE MEJOR
55
4.1 Resultados y discusión…………………………………. 55
CAPITULO 5: COSTO BENEFICIO DEL PROYECTO 56
5.1.2 Costo del recurso humano……………………………. 57 5.1.3 Beneficio de innovación………………………………. 57
Conclusiones………………………………………………….. 59
Anexos…………………………………………………………. 60
Bibliografía……………………………………………………… 64

1.1 RESUMEN El rápido avance de la tecnología en los últimos años ha supuesto una auténtica revolución en nuestras vidas. En los hogares, nadie se plantea levantarse para cambiar el canal de la televisión, encender el equipo de música o algún otro aparato electrónico. El mando a distancia al igual que el teléfono móvil se han convertido en elementos tan cotidianos que no se les da importancia. La posibilidad de mantener una conexión permanente a internet por un precio módico es una realidad ya presente en muchos hogares. Todos estos avances hacen que cada vez se demanden nuevos dispositivos de control a distancia que puedan ser activados desde cualquier lugar y que permitan realizar acciones tales como encender o apagar algún equipo electrónico, o encender y apagar motores industriales.Esto que parece tan trivial y sencillo hoy en día, ha sido y es de una dificultad tecnológica importante. Debemos notar que las primeras aplicaciones de control y programación aparecen en el ámbito industrial durante hace ya algunas décadas. Por ejemplo, el control a distancia de las máquinas ha sido una necesidad que ha ido apareciendo con la evolución de la industria. Una breve reseña desde sus orígenes nos permitirá tomar conciencia del esfuerzo científico y tecnológico que ha supuesto llegar al estado actual. Es por ello que es necesario integrar y desarrollar el interés por el estudio de nuevas tecnologías a los estudiantes de recientes generaciones. Y para lograr dicho objetivo se llevara a cabo una tarjeta entrenadora modular basada en microcontroladores que servirá como trampolín para llevar a cabo una serie de proyectos comunicados vía RF (radio frecuencia), bluetooth IR (infra rojo), así como también la integración de sensores analógicos y digitales y todo ello para el control de motores de C.A (corriente alterna), C.D (corriente directa), servo motores, motores PAP (paso a paso) entre otros.

ABSTRACT
The fast technology advances during the last years has directed our lives in a revolutionary way. At home, nobody gets up to change the TV channel, turn on the CD player or any other white goods. The distance controllers as well as the mobile telephones have become into common devices that have lost their relevance. Nowadays, the possibility of keeping connected to the Internet for a very low price is a reality in many homes. All this technology makes the amount of more distance control devices that can help people to turn on or off any white good or industrial motors even more demanded. This that seems to be so easy and common today has been of a really high technological difficulty. We should take into account that the first control applications and program appeared in the industry area during the last decades. As an example, the distance control of machines has been a necessity that has been increasing with the industry evolution. A brief review since its origins will allow us to think deeply in the scientist and technological effort that has lead to the present.That is the reason why it is necessary to integrate and develop the interest of the technology studies in the students from the latest generations. In order to achieve this goal we are going to elaborate a microcontrollers that will be the basis for a series of projects communicated via RF (radio frequency), Bluetooth IR (infra red) as well as the integration of analogical and digital sensors that will work together with the control motor altern current, direct current, servo motors, steper motors among others.
5

1.2 INTRODUCCIÓN.
Este sistema denominado tarjeta entrenadora de microcontroladores mejor conocidos como pic´s, consiste en un equipo completo para la evaluación de aplicaciones basadas en el microcontrolador PIC de la serie 16F y para ser más específicos 16F877A que es una gama básica que dispone la empresa de MICROCHIP, dicho dispositivo dispone de una serie de periféricos básicos de E/S con los que se puede verificar el funcionamiento de una aplicación así como las circuitería necesaria para la grabación de este modelo en especial.Esta tarjeta entrenadora se le denomina sistema de desarrollo ya que es un equipo físico que en conjunto con el uso de la programación conforman una herramienta capaz de desarrollar todas las operaciones necesarias para diseñar proyectos básicos y de complejidad media, basados en un microcontrolador programable. Entre los objetivos que se persiguen son el desarrollo de prácticas guiadas para que aquellos alumnos que, con una especial motivación, deseen realizar su propio sistema digital basado en el microcontrolador y otras nuevas tecnologías como las anteriormente mencionadas, y dispongan de algunas interfaces ya resueltas de modo que no supongan una gran dificultad añadida al trabajo académico.El primer objetivo del presente proyecto ha sido disponer del sistema basado en el microcontrolador totalmente operativo. Después se han ido incorporando diferentes interfaces y dispositivos para cubrir un abanico de aplicaciones
6

ANTECEDENTES DE LA INSTITUCIÓN.1.3 ANTECEDENTES DE LA INSTITUCIÓN
PRESENTACIÓNEl Colegio Nacional de Educación Profesional Técnica, desde su creación hace casi 30 años, ha representado una alternativa para la formación profesional técnica de miles de jóvenes que desean incorporarse de manera inmediata al mercado laboral, enfrentando el reto de responder con equidad, calidad y pertinencia a las transformaciones socioeconómicas de nuestro país.En la misma dinámica, y con una visión proactiva acerca del contexto de la sociedad mexicana, se lleva a cabo la reorientación del Modelo Educativo del Conalep. En este documento se presenta una síntesis de los elementos que lo integran, siendo éstos el fruto constante del trabajo colegiado del Sistema Nacional de Colegios de Educación Profesional Técnica en el país, en sus tres niveles de operación, y el cual será enriquecido con las aportaciones de quienes lo llevan a su operatividad en los planteles.MISIÓNFormar Profesionales Técnicos a través de un Modelo académico para la calidad y competitividad en un sistema de formación que proporciona a sus egresados la capacidad de trabajar en el sector productivo nacional o internacional, mediante la comprobación de sus competencias, contribuyendo al desarrollo humano sustentable y al fortalecimiento de la sociedad del conocimiento.VISIÓNSomos la institución de formación técnica del sistema de educación media superior de la nación que mejor responde a las necesidades de los sectores productivos del país, con estándares de clase mundial.
Modelo Académico de Calidad para la CompetitividadEl Conalep propone la reorientación de su Modelo Académico como respuesta a la demanda de una formación de recursos humanos altamente calificados y reconocidos en el sector productivo, con una sólida formación ocupacional y académica para la competitividad, respaldada en valores cívicos y de sustentabilidad ambiental, que coadyuven al desarrollo del país.
PROPÓSITOPromueve una formación profesional técnica y capacitación (Profesional Técnico PT, Profesional Técnico Bachiller PTB y Postécnico) pertinentes, flexibles y de vanguardia en congruencia con las necesidades cambiantes del entorno laboral; así como una formación integral y permanente de los individuos en un marco de desarrollo humano sustentable, a través del desarrollo de competencias con un enfoque constructivista del conocimiento y del fortalecimiento de los mecanismos
7

de vinculación con el sector productivo e interinstitucional para asegurar la inserción laboral y posibilitar el ingreso a la educación superior.
ESTRUCTURA DE LAS CARRERAS DEL CONALEPEl Conalep ofrece educación en el nivel medio superior, la cual se cursa en seis semestres de 18 semanas cada uno, con una carga de 35 horas a la semana, obteniéndose un total de 3780. La estructura de su oferta está integrada por núcleos de formación, los cuales responden asertivamente a las necesidades y tendencias educativas tanto del contexto nacional comodel internacional, así como a las políticas educativas establecidas en el Plan Nacional de Desarrollo 20062011.Estos núcleos de formación son: Básica y Profesional y se complementan con los de formación Propedéutica y Postécnica, los cuales son de carácter opcional.FORMACIÓN PROFESIONAL.Orientada al desarrollo de competencias laborales requeridas para la realización de funciones productivas demandadas por los sectores productivos local, regional y nacional, de acuerdo con las tendencias actuales de un mundo globalizado y cambiante.Las competencias a desarrollar en este núcleo corresponden a las competencias profesionales básicas y extendidas establecidas por la SEMS, realimentadas por las competencias genéricas y las mismas disciplinares, si así lo requiere la formación. Existen dos componentes en este núcleo de formación:Formación profesional generalConformada por módulos que se orientan al desarrollo de competencias laborales generales de una carrera. Se cursa de segundo a sexto semestre por los alumnos, tras haber elegido una carrera de la oferta educativa del Colegio.Formación profesional específicaEstá enfocada a proporcionar una formación profesional específica dentro de la carrera elegida, que se traduce en los trayectos técnicos, los cuales constituyen una gama de opciones para los alumnos que, a partir del cuarto semestre, se forman en un campo profesional específico. Los módulos que conforman los trayectos técnicos se caracterizan por ser optativos (el alumno elige al menos un trayecto de acuerdo con sus intereses y necesidades) y regionalizables (directamente relacionados con las necesidades de formación o capacitación de un grupo de población que se puede beneficiar mediante éstos y por su impacto en sectores clave para el desarrollo de regiones focalizadas).
8

PLANTEAMIENTO DE LA PROBLEMÁTICA.Una de las preocupaciones que siempre ha estado vigente dentro de las instituciones educativas tiene lugar a la práctica efectiva de la tecnología, esto es la manera de cómo son aceptados los resultados que emanan de las investigaciones realizadas en esta área.Esta preocupación nos ha llevado a estudiar con detenimiento la forma de cómo se desarrollan los proyectos tecnológicos y las implicaciones directas e indirectas que sobre ello ejerce la aplicación del conocimiento científico en situaciones donde la realidad de la educación exige soluciones eficaces, ya que los distintos sectores de la misma presentan diversas necesidades cuya magnitud incluye distintas aplicaciones de existentes de tecnología de vanguardia.Considerando que una conceptualización de tecnología debe partir de la plataforma de la realidad y de la práctica educativa, reconoceremos que puede ser más que la simple aplicación del conocimiento científico a la solución de problemas y que la integración de esta tecnología, permite proponer estrategias educativas en contextos propios para que a partir de ellas se inicien investigaciones y puedan plantearse alternativas más generalizadas.Para aplicar dicha conceptualización tocaremos temas como es la capacitación a los estudiantes como un proceso que habrá de llevarnos a establecer la relación existente entre la tecnología y la identificación de necesidades dentro de su vida cotidiana y laboral.Como primer tema, comenzaremos por señalar como un hecho reconocido el que desde su origen hasta hoy en dia, la tecnología registra constantemente importantes evoluciones, así lo manifiestan algunas investigaciones realizadas dentro de varias instituciones educativas tanto en nivel medio superior como a nivel superior, y reconocen que aún queda mucho trecho por recorrer. Es por ello que se puntualiza en la problemática de la capacitación que quiere decir o dicho de otro modo, es el proceso de enseñanza-aprendizaje orientado a proporcionar conocimientos y habilidades de índole pedagógica que imparten docencia, con el fin de que puedan cumplir en forma sus responsabilidades de trabajo. Otro aspecto importante y que vale la pena recalcar es la identificación de una necesidad para saber cómo actuar y aplicar los conocimientos tecnológicos adquiridos previamente en una capacitación. Sin lugar a duda la tecnología esta creciendo a pasos agigantados es por ello que es importante una capacitación tanto de profesores como de alumnos en general, especificando que para ofrecer soluciones dentro del ámbito tecnológico debe considerarse que una institución educativa debe tener el equipo y herramientas de tecnología de vanguardia para poder ofrecer una capacitación certera para llevar a cabo las acciones requeridas por el sector productivo o en la vida cotidiana.
9

JUSTIFICACIÓN.En la actualidad las instituciones educativas a nivel técnico bachiller con el afán de que los estudiantes se relacionen con situaciones que se presentan en las industrias. Hoy en día se realizan proyectos a su área de especialidad por lo cual se hace imprescindible construir una tarjeta entrenadora de microcontroladores o mejor conocidos como (PIC), es por ello que dicha tarjeta esta realizada con el propósito de entender y comprender la importancia de la innovación tecnológica ya que la versatilidad del sector productivo es muy demandante y día a día sufre cambios en sus procesos productivos dichos cambios requieren de nueva tecnología, y como se ha mencionado en párrafos anteriores el mundo de los microcontroladores cada vez esta mas presente en nuestro alrededor.Con la tarjeta entrenadora de microcontroladores pretendemos abarcar una amplia capacitación tanto para profesores y alumnos para que conozcan y entiendan mejor la programación y puedan desarrollar su propio sistema controlado por medio de PIC el cual puedan implementar y llevar a cabo acciones demandadas por el sector productivo, además de que desarrollara en los profesores una estrategia de enseñanza aprendizaje y en los estudiantes generara ideas para el proceso de la innovación, estas ideas pueden referirse a desarrollar o mejorar un nuevo producto, servicio o proceso. Además de que se busca el desarrollo de la precisión, la curiosidad, la puntualidad, el entusiasmo, el interés, la tenacidad, la flexibilidad y la autonomía y en consecuencia actué de manera, profesional y a esto llamamos que los alumnos sean competentes.
La competencia como tal es que el alumno Conoce y explica el funcionamiento interno y externo del microcontrolador, realizar programas en lenguaje ensamblador y , utilizando todos los recursos del microcontrolador, para resolver problemas específicos en el ámbito de la aplicación de la ingeniería electrónica y en el desarrollo de aplicaciones y de equipo electrónico, para lo cual el estudiante realizará actividades de investigación, análisis, reflexión, observación, y diseño, apoyándose en el uso de herramientas computacionales. Es importante destacar que este que proyecto que se llevara a cabo cumple con otro objetivo, y es el de coadyuvar a la complementación de la competencia profesional, ya que el desarrollo de la competencia se concreta en la identificación y funcionamiento, pero no en la construcción y diseño de tarjetas PCB para la implementación de nuevas tecnologías y de esta manera Operar microcontroladores acoplados a sistemas electrónicos, realizando la programación de funciones básicas de control. Además de que dicho proyecto es decir que sirve como apoyo para las estrategias de enseñanza-aprendizaje para los semestres subsecuentes.
10

OBJETIVO GENERAL.Diseñar y construir una tarjeta entrenadora de microcontroladores PIC para que aquellos alumnos que, con una especial motivación, deseen realizar su propio sistema digital basado en el microcontrolador 16f877A y otras nuevas tecnologías.
OBJETIVOS ESPECÍFICOS. Diseño y construcción de una placa de circuito impreso organizado y ensamblado de tal manera que sea atractivo y de fácil uso para todos aquellos aprendices del la programación de microcontroladores e interfaces acoplados a sistemas electrónicos, utilizando el equipo y los dispositivos complementarios de nuevas tecnologías para la programación de los mismos, conforme lo establecen los procedimientos técnicos del fabricante y de la normatividad vigente.
11

HIPOTESIS.La construcción de una tarjeta entrenadora de microcontroladores es mucho más eficiente, además de que ahorra tiempo y se evita de cableados en protoboard, y no se diga de las aplicaciones y gran numero de aplicaciones de los microcontroladores o mejor conocidos como PIC.
Los PIC, de Microchip, son una opción más dentro del vasto mercado de microcontroladores. La popularidad de estos micros radica en su alta disponibilidad en el mercado y bajo precio.
Los fabricantes han procurado una difusión exhaustiva de información relativa a sus productos, lo cual ha traído como consecuencia un proliferado uso de este tipo de microcontroladores. Algunos de los profesionales y aficionados o estudiantes que los utilizan difunden sus desarrollos e inventos por la red lo cual ha promovido su uso. Muchos consideran que los PIC son los más fáciles de programar.
Por otro lado, se han desarrollado una serie de herramientas de bajo costo por parte de terceros (empresas, profesionales y aficionados), como son programadores, software, etc., que facilitan el uso y programación de estos dispositivos para su facilidad, manejo y entendimiento de programación.
12

CAPÍTULO II Historia de los microcontroladores 2.1 Antes de comenzar a analizar el mundo de los microcontroladores o mejor conocidos como pic´s, debemos conocer un poco acerca de la historia de los mismos ya que es necesario saber cómo fue el comienzo de todo una tecnología que hoy tenemos muy presente en los ámbitos tanto industrial como en nuestra vida cotidiana.Para el análisis de los microprocesadores y microcontroladores se deben comprender algunos aspectos y entender que fue lo que puso a estos dispositivos en los primeros años. Dando secuencia a la historia de ellos los primeros procesadores o computadoras eran gigantescas y se construyeron en las décadas de 1940 y 1950, construidas con relevadores y tubos de vacio (bulbos). Más adelante, se utilizaron los transistores y componentes electrónicos de estado sólido para comenzar a construir las poderosas computadoras de la década de 1960. Con el advenimiento, de los circuitos integrados se llego al perfeccionamiento del microprocesador y de los sistemas de microcomputadoras.El microprocesador de 4 bits fue creado en 1969 por Intel Corporation y el talento creativo de Marcian. E Hoff que lanzo el primer microprocesador llamado el 4004, de 4 bits. Este microprocesador, programable en un solo encapsulado era insuficiente, según las normas actuales, porque solo direccionaba 4096 localidades de 4 bits en la memoria. El 4004 contenía un conjunto o set de 45 instrucciones diferentes. Como consecuencia el 4004 solo podía ser empleado en aplicaciones limitadas, como los primeros juegos de video y en controladores basados en microprocesadores. Cuando surgieron aplicaciones mas complejas para el microprocesador, el 4004 resulto inadecuado, y mas tarde en 1971 apareció el microprocesador de 8 bits el cual se dieron cuenta sus creadores de que era un producto, viable, para comercialización Intel Corporation lo llamo el 8008. El tamaño ampliado de la memoria (16Kohm) y las instrucciones adicionales (un total de 48). Con este nuevo microprocesador brindaron la oportunidad de muchas aplicaciones más avanzadas ( 1K es igual a 1024 y un byte es un numero de 8 bits).Conforme los ingenieros desarrollaban usas mas demandantes para el microprocesador, la memoria y el juego de instrucciones del 8008, el primero de los microprocesadores modernos de 8 bits, otras empresas comenzaron a lanzar sus propias versiones de los procesadores de 4 y de 8 bits. Pero con la llegada de estos antiguos microprocesadores y con La situación actual en el campo de los microcontroladores se ha producido gracias al desarrollo de la tecnología de fabricación de los circuitos integrados. Este desarrollo ha permitido construir las centenas de miles de transistores en un chip. Esto fue una
13

condición previa para la fabricación de un microprocesador. Las primeras microcomputadoras se fabricaron al añadirles periféricos externos, tales como memoria, líneas de entrada/salida, temporizadores u otros. No mucho tiempo después de eso, la compañía americana CTC pidió a INTEL y Texas Instruments que hiciera un microprocesador de 8 bits. Aunque después a CTC no le interesó mas la idea, Intel y Texas Instruments siguieron trabajando en el microprocesador y el primero de abril de 1972, el microprocesador de 8 bitsaparece en el mercado con el nombre de 8008. Podía direccionar 16 Kb de memoria, con un set de 45 instrucciones y una velocidad de 300 000 operaciones por segundo. Este microprocesador es el predecesor de todos los microprocesadores de hoy. Intel mantuvo sus desarrollos y saco al mercado el procesador de 8 bits bajo el nombre 8080, el cual podía direccionar 64Kb de memoria, con 75 instrucciones, a un precio de 360 dlls.En otra compañía americana, Motorola, comprendieron rápidamente lo que estaba sucediendo, así que ellos sacaron al mercado su microprocesador de 8 bits, el 6800. Su constructor principal era Chuck Peddle, y junto con el procesador, Motorola fue la primera compañía en hacer otros periféricos como el 6820 y el 6850. En ese momento muchas compañías reconocieron importancia de los microprocesadores y empezaron sus propios desarrollos. Chuck Peddleabandonó Motorola para unirse a la Tecnología MOS y se mantuvo trabajando intensamente en el desarrollo de los microprocesadores. En Estados Unidos, la Tecnología MOS anunció que estaba comercializando los microprocesadores 6501 y 6502 a 25 dlls. cada uno, y que los compradores podrían adquirirlos inmediatamente. Esto era tan extraordinario, que algunas personas creyeron que era un escándalo, considerando que los competidores estaban vendiendo el 8080 y el 6800 a 179dlls. cada uno. Intel y Motorola bajaron sus precios en el primer día de la exhibición como una respuesta a su competidor, 69.95 por microprocesador. Motorola reclama a la Tecnología de MOS y a Chuck Peddle el haberles copiado su 6800. La Tecnología MOS suspende la fabricación del 6501, pero siguen produciendo el 6502. Los 6502 eran microprocesadores de 8 bits, 56instrucciones y la capacidad de direccionar 64Kb de memoria directamente. Para reducir el costo, el 6502 se vuelve muy popular, así que se instala en las computadoras tales como: KIM-1, Apple I, Apple II, Atari, Comodore, Acorn, Oric, Galeb, Orao, Ultra, y muchas otras. Y muy pronto aparecieron varios fabricantes del 6502 (Rockwell, Sznertek, GTE, NCR, Ricoh, y Comodore quienes toman la Tecnología MOS) el cual estaba en su momento de apogeo y se vendía a una velocidad de 15 millones de procesadores por año. Otros, sin embargo, no se rindieron. Federico Faggin deja Intel, y empieza su propio Zilog Inc.En 1976, Zilog anuncia el Z80. Durante la fabricación de este microprocesador, Faggin toma una decisión giratoria. Sabiendo que ya se han desarrollado muchos
14

programas para 8080, Faggin sabía que muchos se quedarían fieles a ese microprocesador. Así que decide diseñar un nuevoprocesador que pueda ser compatible con 8080, o que sea capaz de desarrollar todos los programas que ya se habían escrito para el 8080. Además de estas características, se agregaron muchas otras para que el Z80 fuera un microprocesador muy poderoso. Podía direccionar 64 Kb de memoria, tenía 176 instrucciones, un gran número de registros, una opción para refresco dememoria dinámica de la RAM, mayor velocidad de trabajo etc. El Z80 fue un gran éxito y todos cambiaron del 8080 al Z80. Puede decirse que el Z80 fue el microprocesador comercializado más exitoso de ese tiempo. Además de Zilog, también aparecieron otros nuevos fabricantes como Mostek, NEC, SHARP, y SGS. Z80 estaba en el corazón de muchas computadoras como en Spectrum, Partner, TRS703, Z-3 etc.En 1976, Intel propone una versión mejorada del microprocesador de 8 bits, al cual nombró 8085. Sin embargo, el Z80 era tan bueno que Intel perdió la batalla. Aunque más procesadores aparecían en el mercado (6809, 2650, SC/MP etc.), ya todo estaba decidido. Ya no había grandes mejoras departe de los fabricantes para hacer algo nuevo, así que el 6502 y el Z80 junto con el6800 permanecieron como los representantes principales de los microprocesadores de 8 bits de ese tiempo.Aunque en toda esta historia, se mencionan erróneamente microprocesadores, la realidad, es que las primeras PCs, emplearon microcotroladores, los cuales, como ya vimos, cuentan con un procesador y memoria. Posteriormente, se dio el paso a los microprocesadores, que no cuentan con la memoria, en el mismo circuito integrado, y los microcontroladores, tienen su aplicación en aparatos electrodomésticos automóviles, en la industria, entre otros.En 1980 aproximadamente, los fabricantes de circuitos integrados iniciaron la difusión de un nuevo circuito para control, medición e instrumentación al que llamaron microcomputador en un sólo chip o de manera más exacta.
15

2.1.1 Microcontrolador.Un microcontrolador es un circuito integrado que contiene toda la estructura (arquitectura) de un microcomputador, o sea CPU, RAM, ROM y circuitos de entrada y salida. Los resultados de tipo práctico, que pueden lograrse a partir de estos elementos, son sorprendentes.En el mundo de la electrónica algunos estudiantes principiantes creen que un microcontrolador es igual a un microprocesador. Esto no es cierto. Difieren uno del otro en muchos sentidos. La primera y la más importante diferencia es su funcionalidad. Un microprocesador es un circuito integrado que contiene la Unidad Central de Proceso (CPU), también llamada procesador, de una computadora. El CPU está formada por la Unidad de Control, que interpreta las instrucciones, y el Camino de Datos, que las ejecuta. Las patitas de un microprocesador sacan al exterior las líneas de sus buses de direcciones, datos y control, para permitir conectarle con la Memoria y los Módulos de E/S y configurar una computadora implementada por varios circuitos integrados. Se dice que un microprocesador es un sistema abierto porque su configuración es variable de acuerdo con la aplicación a la que se destine.Para utilizar al microprocesador en una aplicación real, se debe de conectar con componentes tales como memoria o componentes buses de transmisión de datos. Aunque el microprocesador se considera una máquina de computación poderosa, no está preparado para la comunicación con los dispositivos periféricos que se le conectan. Para que el microprocesador se comunique con algún periférico, se deben utilizar los circuitos especiales. Así era en el principio y esta práctica sigue vigente en la actualidad.
Por otro lado, al microcontrolador se le diseña de tal manera que tenga todas las componentes integradas en el mismo chip. No necesita de otros componentes especializados para su aplicación, porque todos los circuitos necesarios, que de otra manera correspondan a los periféricos, ya se encuentran incorporados. Así se ahorra tiempo y espacio necesario para construir un dispositivo y la diferencia de ellos se muestra en la figura 1
16

Figura 2.1
2.2 Los Fabricantes y sus Modelos de Microcontroladores
•INTEL -------------------------------------->8048,8051,80C196,80386•MOTOROLA -------------------------------->6805,68HC11,68HC12•HITACHI------------------------------------> HD64180•PHILIPS ------------------------------------>8051•SGS-THOMSON-----------------------------> ST-62XX•NATIONAL SEMICONDUCTOR-------------> COP400,COP800•ZILOG---------------------------------------> Z8,Z86XX•TEXAS INSTRUMENTS---------------------> TMS370•TOSHIBA------------------------------------> 68HC11•MICROCHIP---------------------------------> PICSEGÚN UNIDADES VENDIDAS DE MICROS DE 8 BITS
19901996
1.- Motorola2002
1.- Microchip
17

1.- Motorola2.- Mitsubishi3.- NEC4.- Intel5.- Hitachi6.- Philips7.- Matsushita8.- National9.- Siemens10.- TI11.- Sharp12.- Oki13.- Toshiba14.- SGS-Thomson15.- Zilog16.- Matra17.- SONY18.- Fujitsu19.- AMD20.- Microchip
2.- Mitsubishi3.- SGS-Thomson4.- NEC5.- Microchip6.- Philips7.- Zilog
2.- Motorola3.- ST-Micro4.- NEC5.- Atmel6.- Sunplus7.- Hitachi8.- Fujitsu9.- Philips10.- Toshiba11.- Mitsubishi12.- Samsung13.- Elan14.- Winbond15.- Zilog16.- Sanyo17.- Matsushita18.- Infineon19.- Holtek20.- National
Tabla 2.1 marcas mas vendidas en los últimos 12 años
¿Dónde tenemos microprocesadores y microcontroladores?30% computación
30% hogar
15% comunicaciones15% industria10% automóvil
Evolución Microprocesadores: Computadores75 Millones Microprocesadores/añoEvolución Microcontroladores: Sistemas Empotrados
2500 Millones Microcontroladores/año, No hay duda que disponer de un chip que cuente con tantos subsistemas, es un gran avance y consecuentemente muy rentable.
18

Los microcontroladores de 8 bits dominan en la mayoría de las aplicaciones el microcontrolador es el núcleo del sistema electrónico versátil de bajo coste y reducido tamaño que es capaz de detectar las señales de entrada y generar las salidas de un equipo, sistema o instrumento. Por su reducido tamaño y coste permiten la fácil implantación de sistemas de “inteligencia” distribuida a lo largo de sistemas más complejos. Los microcontroladores son los semiconductores más abundantes de todos en la actualidad.
2.3El catálogo actual de Familias de Microcontroladores PIC• Familia PIC10F20x 4 Dispositivos• Familia PIC12CXXX/12FXXX (12/14 bits) 8 Dispositivos• Familia PIC16C5X (12 bits) 9 Dispositivos• Familia PIC16CXXX/16FXXX (14 bits) 74 Dispositivos• Familia PIC17CXXX (16 bits) 7 Dispositivos• Familia PIC18CXXX/18FXXX (16 bits) 82 DispositivosLos microcontroladores son la evolución natural de la tecnología de la microelectrónica de los microprocesadores. Un microprocesador se basa en una CPU donde el bus de datos, el bus de direcciones y el bus de control salen al exterior, en ellos se conectan los periféricos necesarios para realizar un sistema.
Un microcontrolador integra una cantidad de periféricos, así como el bus y permite tener un dispositivo para cada solución.
Aunque, siguen existiendo microcontroladores con bus externo, normalmente son de 16 o 32 bits y se utilizan en sistemas donde a parte de los periféricos necesarios se necesita una gran cantidad de memoria de programa, memoria de datos o entradas/salidas.
2.3.1Novedades relevantes de los microcontroladores
Los microcontroladores día a día nos van sorprendiendo con nuevas características, nuevos periféricos y nuevas estructuras. En este comienzo de milenio, realmente han dado un gran adelanto con la tecnología Flash en la memoria de programa, que permite programar y borrar la memoria en la propia placa de nuestro sistema (ISP). También permite la reprogramación de la misma sin parar la aplicación (IAP).Con la incorporación de un circuito PLL en el oscilador, permite poder utilizar un cristal de baja frecuencia, así como programar la frecuencia del Bus. Los supervisores de funcionamiento tanto a nivel software como a nivel hardware, es
19

otra mejora relevante, lo que permite reducir el número de componentes externos en nuestro hardware. Las nuevas tecnologías del silicio permiten aumentar la velocidad del Bus y disminuir el consumo, así como utilizar encapsulados más pequeños, reduciendo el costo. También la incorporación de un módulo de depuración interno, ha permitido crear nuevas herramientas de desarrollo mucho más económicas, donde se puede tener una emulación en tiempo real.
2.4Microcontroladores PIC• Arquitectura Harvard: buses internos separados para memoria de datos (8 bits) y de programa (12, 14 ó 16 bits depende de la familia).• Microprocesador RISC: juego de instrucciones reducido.• Estructura pipe-line: durante la ejecución de una instrucción, se está accediendo a la memoria de programa para traer la siguiente instrucción a ejecutar. En cuanto se acaba una instrucción, ya se dispone de la siguiente para ejecutar (salvo que se trate de un salto o llamada a subpr.).• Todas las instrucciones ocupan una posición de memoria de programa.• Todas las instrucciones se ejecutan en un ciclo de instrucción = 4 ciclos de reloj (salvo las instrucciones de salto).• Ortogonalidad de los registros: se opera entre el registro de trabajo W y cualquier otro registro, el resultado puede almacenarse en el citado registro o en W
2.4.1 ¿Por qué los Microcontroladores PIC de Microchip?• Eficiencia del código: permiten una gran compactación de los programas.• Rapidez de ejecución: a frecuencia de 20MHz -> 5 millones de instr./seg.• Seguridad en acceso por la separación de memoria de datos y de programa.• Juego reducido de instrucciones y de fácil aprendizaje.• Compatibilidad de pines y código entre dispositivos de la misma familia o incluso de familias distintas.• Gran variedad de versiones en distintos encapsulados (desde 8 hasta 84 pines) sin reducción de las prestaciones internas (muy versátiles).• Posibilidad de protección del código muy fiable.• Herramientas de desarrollo software y hardware abundantes y de bajo coste
2.4.2 La influencia de los Microcontroladores en la vida diaria
El microcontrolador es uno de los logros más sobresalientes del siglo XX. Hoy existen casi 15,000 millones de microchips de alguna clase en uso. Para la mitad
20

del siglo próximo, es posible que el microcontrolador típico tenga mayor poder de cómputo que las supercomputadoras más veloces de hoy.Nuestros antepasados no podían ni imaginarse el cambio que se iba a producir en sus vidas este pequeño chip de silicio.Actualmente los podemos encontrar en cualquier sitio: microondas, frigoríficos, coches, aviones, mandos a distancia, radios, televisores.......Hoy se puede comprar tarjetas de felicitación que contienen procesadores con mayor poder de cómputo que las computadoras más grandes del mundo en 1971. Los microcontroladores son tan ubicuos y económicos que ahora los ponemos bajo la piel de nuestras mascotas, los cosemos a prendas de vestir y los agregamos a bombillas eléctricas, tenis para correr, ataduras de esquíes y joyería.Muchos futuristas predicen que en siete generaciones contadas a partir de ahora, estos chips incorporarán reconocimiento del habla a procesadores de textos y sistemas de entrada de pedidos. Producirán gráficos en 3D del tamaño de muros para televisión, teleconferencias e incluso películas personalizadas. Dirigirán nuestros vehículos para optimizar la seguridad y crearán mundos virtuales por los que nos desplazaremos. Darán instrucción a nuestros hijos, supervisarán nuestra salud, reemplazarán partes perdidas del cuerpo y, a través de una retícula de miles de millones de sensores, nos conectarán con el mundo en formas que sólo podemos imaginar vagamente. En definitiva, el microcontrolador puede ser considerado como uno de los inventos más importantes de este siglo, y quien sabe si también del próximo.Algunos microcontroladores más especializados poseen además convertidores análogos digital, temporizadores, contadores y un sistema para permitir la comunicación en serie y en paralelo.Se pueden crear muchas aplicaciones con los microcontroladores. Estas aplicaciones de los microcontroladores son ilimitadas (el límite es la imaginación) entre ellas podemos mencionar: sistemas de alarmas, juego de luces, paneles publicitarios, etc. Controles automáticos para la Industria en general. Entre ellos control de motores DC/AC y motores de paso a paso, control de máquinas, control de temperatura, control de tiempo, adquisición de datos mediante sensores, etc.Un controlador es un dispositivo electrónico encargado de, valga la redundancia, controlar uno o más procesos. Por ejemplo, el controlador del aire acondicionado, recogerá la información de los sensores de temperatura, la procesará y actuará en consecuencia.Al principio, los controladores estaban formados exclusivamente por componentes discretos. Más tarde, se emplearon procesadores rodeados de memorias, circuitos de E/S, sobre una placa de circuito impreso (PCB). Actualmente, los controladores integran todos los dispositivos antes mencionados en un pequeño chip. Esto es lo que hoy conocemos con el nombre de microcontrolador.
21

En especial en este documento se realizara una tarjeta entrenadora basada en el microcontrolador (pic) 16f8877A el cual tiene las siguientes características.
El PIC16F877A es un microcontrolador con memoria de programa tipo FLASH, lo que representa gran facilidad en el desarrollo de prototipos y en su aprendizaje ya que no se requiere borrarlo con luz ultravioleta como las versiones EPROM, sino que permite reprogramarlo nuevamente sin ser borrado con anterioridad.El PIC16F877A es un microcontrolador de Microchip Technology fabricado en tecnologíaCMOS, su consumo de potencia es muy bajo y además es completamente estático, esto quiere decir que el reloj puede detenerse y los datos de la memoria no se pierden.El encapsulado más común para este microcontrolador es el DIP (Dual In-line Pin) de40 pines, propio para usarlo en experimentación. La referencia completa esPIC16F877-04 para el dispositivo que utiliza cristal oscilador de hasta 4 MHz,PIC16F877-20 para el dispositivo que utiliza cristal oscilador de hasta 20 MHz oPIC16F877A-I para el dispositivo tipo industrial que puede trabajar hasta a 20 MHz. en la figura 1.2 se muestra la configuración de pines del circuito integrado como tal.
Configuración de pines
Figura 2.2 Distribución de pines del PIC16F877A.
Los pines de entrada/salida de este microcontrolador están organizados en cinco puertos, el puerto A con 6 líneas, el puerto B con 8 líneas, el puerto C con 8 líneas, el puerto D con
22

8 líneas y el puerto E con 3 líneas. Cada pin de esos puertos se puede configurar como entrada o como salida independiente programando un par de registros diseñados para tal fin. En ese registro un bit en "0" configura el pin del puerto correspondiente como salida y un bit en "1" lo configura como entrada. Dichos pines del microcontrolador también pueden cumplir otras funciones especiales, siempre y cuando se configuren para ello.
En la fig 1.2 se muestra la configuración de los pines de entradas y salidas (E/S).
Figura2.3. Distribución de los puertos del PIC16F877A
Descripción de los pines del microcontrolador (anexo1a)
2.5 Modulo PWM del PIC 16F877A
El Modulo PWM del PIC 16F877 tiene una resolución máxima de 10 bit y su salida se toma del puerto RA, por lo cual debe estar configurado como salida en el registro Tris C.
23

2.5.1Periodo PWM
El Periodo del Modulo PWM es configurado dando un valor al registro PR2. Este periodo puede ser calculado usando la siguiente formula:PWM Period = [(PR2) + 1] • 4 • TOSC • Prescale del Timer 2Como ya es sabido la frecuencia esta determinada por 1/Periodo PWMCuando el valor del Timer 2 alcanza el valor de PR2, los siguientes eventos ocurren en el siguiente ciclo de tiempo:
- TMR2 es limpiado- El pin CCP1 es puesto a 1- El Periodo de trabajo del PWM es cambiado de CCPR1H a CCPR1L
Ciclo de trabajo del PWMEl ciclo de trabajo del PWM es determinado escribiendo al registro CCPR1L y CCP1CON<5:4> (10 bits de resolución).El ciclo de trabajo se obtiene usando la siguiente fórmula:Tiempo de Trabajo PWM = (CCPR1L:CCP1CON<5:4>) •TOSC • (TMR2 Prescale Value)Para modificar el ciclo de trabajo, en cualquier momento se puede escribir a CCPR1L y CCP1CON<5:4>, pero estos valores no serán tomados en consideración hasta que el Timer alcance al PR2 y reinicie su operación tomando en cuenta los nuevos valores.
Tiempo de trabajo = % Ciclo de trabajo / Fpwm
Para calcular la máxima resolución del PWM a determinada frecuencia usamos la siguiente fórmula:
Formula para resolución del modulo PWM
2.5.2CONFIGURACION DEL PWMPasos para la configuración del Modulo PWM del PIC 16F877A1. Configurar el Periodo dando un valor al registro PR22. Configurar el Ciclo de Trabajo escribiendo en: CCPR1L:CCP1CON<5:4>
24

3. Limpiar el Tris C, 2 para asignar la salida del modulo (CCP1)4. Asignar el valor del Prescale del Timer 2 (T2CON)5. Configurar el modulo CCP1 para operación PWM.
Ejemplo de frecuencias y su resoluciónÚtil interfaz óptica para amplificar sin peligro nuestras señales digitales de reloj (clock) y de paso desfasarlas 180° para uso en controles de potencia, especialmente en inversores ó convertidores tipo DC AC, para por ejemplo subir de 12 V DC a 120 VAC entre otras muchas aplicaciones.
Se pueden apreciar los dos voltajes de la interfaz: 5 V para la entrada de señal de reloj y 12 V para la etapa de potencia. La GND puede ser compartida.
Al ingresar la señal por el pin 2 de J4, se podrá ver como el LED D2 y el LED D3 siempre están desfasados 180 ° el uno del otro a la frecuencia del reloj; obviamente que si esta frecuencia es mayor a 20 Hz el efecto visual es que ambos están encendidos al tiempo, pero en realidad están uno después del otro.
La colocación estratégica de los optoacopladores tipo diodo-NPN (4N26 por ejemplo), evita el tener que usar integrados y etapas desfasadoras adicionales que aumenten trabajo, gastos y líneas de código si estamos programando un oscilador con PIC para este fin.
CAPITULO 3.Desarrollo teórico de la propuesta de mejora
25

Para la elaboración y construcción de la tarjeta entrenadora de pic´s fue elaborada con algunos elementos y dispositivos electrónicos y eléctricos, de igual forma se recurrió al uso de un software para el diseño tanto del esquemático y del PCB (Baquelita), cabe mencionar que cada uno de los elementos es indispensable para el correcto funcionamiento de la tarjeta entrenado de pic´s-Base zif.-Regulador de voltaje 7805.- resistencia eléctrica. -Transistores. -Led.-capacitores.
3.1Base zif o zócalo
La tarjeta entrenadora de pic´s cuenta con un zócalo o base zif, este zócalo (socket en inglés) es un sistema electromecánico de soporte y conexión eléctrica, instalado en la placa base, que se usa para fijar y conectar un microprocesador. Se utiliza en equipos de arquitectura abierta, donde se busca que haya variedad de componentes permitiendo el cambio de la tarjeta o el integrado. En los equipos de arquitectura propietaria, los integrados se añaden sobre la placa base soldándolo, como sucede en las videoconsolas.
Existen variantes desde 40 conexiones para integrados pequeños, hasta más de 1300 para microprocesadores, los mecanismos de retención del integrado y de conexión dependen de cada tipo de zócalo, aunque en la actualidad predomina el uso de zócalo ZIF (pines) o LGA (contactos)
El zócalo va soldado sobre la placa base de manera que tiene conexión eléctrica con los circuitos del circuito impreso. El procesador se monta de acuerdo a unos puntos de guía (borde de plástico, indicadores gráficos, pines o agujeros restantes) de manera que cada pin o contacto quede alineado con el respectivo punto del zócalo. Alrededor del área del zócalo, se definen espacios libres, se instalan elementos de sujeción y agujeros, que permiten la instalación de dispositivos de disipación de calor, de manera que el procesador quede entre el zócalo y esos disipadores véase la fig 1.3.
26

Figura 3.1 Base zif
3.1.2 Regulador de voltaje 7805.Los reguladores de voltaje 7805 son uno de los modelos más usados en circuitos electrónicos porque tienen una salida ideal para alimentar otros circuitos y microcomponentes. Este recibe un voltaje de hasta 20V de un lado y te entrega 5V del otro, siempre. Puede trabajar con 1A pero puedes hacerlo funcionar con un poco más que eso (solo ten cuidado con la disipación de calor).
El regulador de voltaje 7805 tiene 3 pines. El de en medio va a tierra (GND), el de la izquierda (IN) recibe el voltaje que deseas regular, puede ir desde 7V hasta 20V y el pin restante te entrega 5V.
Habrás notado que en la parte superior tienen un agujero, es porque este microcomponente hierve con facilidad en especial cuando se le lleva al límite de su funcionamiento (y eso es algo que se quiere evitar). Puedes emplear un tornillo y/o hacer contacto con una superficie metálica para ayudar a disipar el calor. También puedes encontrar unos disipadores especiales para el 7805 en tu tienda de electrónica preferida.
27

Figura 3.1.2 Distribución de patillaje
La familia 78xx y 79xx son una gama de integrados dedicados a la regulación de voltaje, hay muchas variables: regulables, fijos, de tensión positiva o negativa.
Pero el mas común, y el que mayormente usaremos en el mundo de los PICs, es el famoso 7805, que es un regulador de tensión positiva de 5 Volts a 1A, la tensión justa y mucho mas corriente de la que necitan nuestros PICs para funcionar. Se sabe que el buen funcionamiento del firmware que grabemos en el PIC está sujeto, no sólo a la buena programación que hayamos hecho a la hora de diseñarlo, sino que también a una alimentación fija, constante y regulada a la hora de ejecutarlo. Entonces la manera mas segura, económica y sencilla de obtener ese voltaje, es la utilización de un integrado regulador de voltaje, y el 7805 es uno de los mas indicados ya que mantendrá fija la tensión en 5V, siempre y cuando en su entrada reciba al menos 6V. Por lo tanto a la entrada podremos despreocuparnos de la alimentación superando por mucho el voltaje de trabajo del PIC.
Para trabajar con baterías sólo basta con conectar la entrada del IC (PIN 1) al terminal positivo de la misma y el común (PIN 2) al negativo, a la salida tenemos 5V que es la tensión de trabajo del microcontrolador, podremos añadir un capacitor entre GND y la salida, como se aprecia en la Figura 1, para eliminar cualquier fluctuación de voltaje que pueda ocurrir, pero esto es siempre recomendable hacerlo con el microcontrolador independientemente del origen que tenga la alimentación.
28

Si al IC lo usaremos para regular la tensión proveniente de una fuente de alimentación, el filtrado debe hacerse más concienzudamente, a parte del capacitor luego de la regulación, necesitará dos mas antes, en el diagrama de la figura 2 se ve el circuito para conectarlo a una fuente de alimentación regulada o estabilizada de mas de 5 V.
Figura.3.1.4 7805 conectado a una fuente de alimentación regulada o estabilizada de una tensión superior.
Para hacer una fuente completa que se conecte a 220V se necesita agregar un transformador de corriente alterna y rectificar la tensión saliente para convertirla en continua y poder acoplarla al circuito antes visto.
3.1.3 RESISTENCIA ELECTRICALa resistencia eléctrica es toda oposición que encuentra la corriente a su paso por un circuito eléctrico cerrado, atenuando o frenando el libre flujo de circulación de las cargas eléctricas o electrones. Cualquier dispositivo o consumidor conectado a un circuito eléctrico representa en sí una carga, resistencia u obstáculo para la circulación de la corriente eléctrica.Una resistencia o resistor es un elemento que causa oposición al paso de la corriente, causando que en sus terminales aparezca una diferencia de tensión.
29

Figura 3.1.3 resistencia eléctrica.
3.1.4 LCD 16x2 (display de cristal liquido) Otra de las tecnologías agregadas a la tarjeta entrenadora de pic´s es una LCD de 16X2 que quiere decir q se obtiene 16 caracteres en dos renglones debido a las limitaciones de los dsiplay de 7 segmentos.Si bien muchas aplicaciones donde debemos mostrar información podemos resolverlas con display de 7 segmentos, estos presentas algunas limitaciones importantes, por ejemplo: no muestran caracteres alfanuméricos ni ASCII, y tienen un elevado consumo de corriente (recordemos que estamos encendiendo LEDs). Los módulos LCD (display de cristal líquido) solucionan estos inconvenientes y tienen algunas ventajas adicionales como la facilidad que con que se pueden conectar a microprocesadores y microcontroladores, sumado a la óptima presentación de la información.
Figura 3.1.4 LCD 16X2.
30

3.1.5 CARACTERISTICAS PRINCIPALES DE LOS MODULOS LCDLos módulos LCD se encuentran en diferentes presentaciones, por ejemplo 2x16 (2 líneas de 16 caracteres), 2x20, 4x20, 4x40, etc. Es conveniente buscar en catálogos para encontrar aquel que cumpla con las necesidades de nuestro proyecto. La forma de utilizarlos y sus interfaces (como se conectan) son similares. En la hoja de datos del display viene la distribución de pines, alimentación y el controlador (CI interno del modulo), etc. Es fundamental también buscar la hoja de datos de CI interno o controlador de LCD, allí encontraremos la información para operar con el mismo. Describiremos a continuación como trabajar con el display 2x16 (FDCC1602E con controlador interno SPLC780) y se podrá considerar esta información genérica para displays similares. Se muestra en la tabla 1.2 un display de este tipo. Los pines de conexión de estos módulos incluyen un bus de datos de 8 bits, un pin de habilitación (E), un pin de selección que indica si lo que se esta enviando por el bus es un dato o una instrucción (RS) y un pin que indica si se va a leer o escribir en el módulo (R/W). La tabla a continuación describe en detalle los pines mencionados.
Tabla 3.1.5 Descripción de pines del LCD
31

Según la operación que se desee realizar en el módulo LCD, los pines de control E, RS#, RW# deben tener un estado determinado. Además debe tener en el bus de datos un código que indique un carácter para mostrar en la pantalla o una instrucción de control para el display. Los módulos LCD responden a un conjunto especial de instrucciones, estas deben ser enviadas por el microcontrolador o sistema de control al display, según la operación que se requiera. Se muestran a continuación el conjunto de instrucciones del modulo LCD.
3.1.6 INTERFAZ CON MICROCONTROLADOR A 8 BITSEsta forma de manejo es la mas sencilla de programar, pero tiene la desventaja de utilizar 8 pines del microcontrolador solo para el envío de datos y otros 2 pines para las señales de control.En principio en la mayor parte de las aplicaciones se va requerir escribir en el LCD y rara vez leer en el mismo, por lo tanto en este apunte nos dedicaremos exclusivamente a escribir en el LCD. Esto implica que el pin de selección de lectura/escritura (R/W) lo conectaremos siempre a tierra GND.Utilizaremos el puerto B como bus de datos (manejará los pines D0 a D7 del LCD) y el puerto D se encarga de manejar las señales de control (manejará los pines E y RS del LCD).Deberemos programar 2 subrutinas, una que llamaremos INSTRUC que será invocada cuando se quiera enviar una instrucción al módulo LCD, por ejemplo limpiar pantalla, indicar una posición de memoria, indicar si utilizaremos interfaz de 8 o 4 bits etc.Y otra subrutina que llamaremos ESCRIB que será invocada cuando se quiera escribir un dato para ser visualizado en el módulo LCD.Configuraremos entonces todo el puerto B como salida al igual que los pines RA0 y RA1 del puerto D, estando asignado cada pin del puerto como se indica a continuación:El puerto D del PIC, ira a los pines de datos de la pantalla.El pin RS de la pantalla va al pin 2 del PORTCEl pin EN de la pantalla va al pin 1 del PORTCEl pin R/W de la pantalla va a tierra para esta aplicación El pin Vo es el del contraste y va al pin medio del potenciómetro. Ahora que le informamos donde vamos a escribir el dato, deberemos enviarlo y aclararle que se esta enviando un dato, para lo cual necesitaremos una subrutina que justamente hará esto y que la llamaremos ESCRIB. La secuencia de instrucciones sería así:MOVLW 80h; carga en w dirección de memoria del LCD donde se va almacenar el datoCALL INSTRUC; subrutina que gestiona la instrucción con el LCD- en este caso que tome lo que se esta enviando como una dirección de memoria
32

MOVLW 'A'; este es el dato a presentar en pantallaCALL ESCRIB; subrutina que gestiona el ingreso del dato al LCD a la posición de memoria antes enviada.
Figura3.1.6 carácter enviado a la LCD
3.2 MICRO PROGRAMADOR USB
La tarjeta entrenadora cuenta con un microprogramador usb y sus características son similares a las del PicKIT 2 este se utilizara para la programación del propio microcontrolador. A continuación se presentan las características del programador.
Características: Programador de PICs de microchip por USB compatible con WinXP, WinVista y Win7. Programas todos los Microcontroladores PIC que funcionan a 5V, sirve como debugger desde el MPLAB. Se usa para programar por medio de ICSP (programación serial el circuito) por lo que no se necesita retirar el PIC de circuito para poderlo programar, simplemente se conectan los pines necesarios el programador (MCLR, Vcc, GND, PGD y PGC) y podrás programar, reprogramar borrar y probar tu circuito sin necesidad de mover mas que tu código fuente.
Solo se muestran algunos de los Microcontroladores que soporta ya que su gama es muy amplia:
33

PIC16
Midrange
PIC16F72
PIC16F73, 74, 76, 77 PIC16F716
PIC16F737, 747, 767, 777
PIC16F785, HV785
PIC16F84A, 87, 88
PIC16F818, 819
PIC16F870, 871, 872
PIC16F873, 874, 876, 877
PIC16F873A, 874A, 876A, 877A
PIC16F882, 883, 884, 886, 887
PIC16F913, 914, 916, 917
PIC16F946
PIC24
PIC24F16GA004
PIC24F32GA004
PIC24F48GA004
PIC24F64GA004
PIC24F64GA008, 64GA010
PIC24F96GA008, 96GA010
PIC24F128GA008, 128GA010
PIC18F
PIC18F242, 252, 442, 452
PIC18F248, 258, 448, 458
PIC18F1220, 1320, 2220, 2320
PIC18F1230, 1330
PIC18F2221, 2321
Tabla3.2.1 Gama de microcontroladores que soporta el programador
34

A continuación se muestran la figuras del micro programador usb:
Figura 3.2.1 vista frontal figura 3.2.2 vista posterior
En la siguiente figura se muestra la distribución de patillaje así como la conexión al microcontrolador PIC 16F877A.
35

Figura 3.2.3 de distribución de patillaje figura 3.2.4 de conexión al PIC
NOTA: el pin correspondiente al AUX no es necesario para la programación de Microcontroladores, sin embargo se usara para aplicaciones especiales para el DEBUGGER o para la programación de memorias EEPROM.El software.
3.3 PICKIT2 – MICROCHIP. Este software es de licencia libre, distribuido por MICROCHIP. Y es requerido para poder hacer la interface entre los códigos hexadecimales creados por nuestro lenguaje de programación (ensamblador, basic, c, etc.) y el programador de PICS. Instalar el programa PICkit 2 Programmer Una vez instalado el software debemos tener acceso a el, por lo que previamente se debe conectar el programador a alguno de los puertos USB disponibles en nuestro equipo. Al iniciar el programa PICKIT 2 aparecerá la siguiente ventana.Figura 3.3.1
36

Figura 3.3.1
Se nota que el software nos arroja el comentario: vea figura 3.3.2
Figura 3.3.2
Con lo que se comprobara que el programador esta correctamente conectado y por lo tanto fue reconocido por el sistema. 3.3.2 ¿Cómo iniciar la lectura o escritura de un Micro controlador PIC? Una vez conectados correctamente los pines del puerto ICSP a la tarjeta entrenadora de microcontroladores , o al dispositivo seleccionado los pasos son muy sencillos:
3. oprimir el botón READ. Con esta acción el software comenzara a leer al PIC que se encuentre conectado al puerto ICSP, una ves terminado el análisis tendremos la siguiente imagen en pantalla. Figura 3.3.3
37

Figura 3.3.2
En este caso el PIC detectado es un 16F877A (encapsulado PDIP de 40 pines), el cual al momento de su lectura no se encontró programa alguno dentro de su memoria, pero si existiera alguno el software mostraría algo así:
Figura 3.3.3
Observando que en la parte correspondiente a Program Memory nos muestra valores en código hexadecimal, lo cual quiere decir que el PIC tiene un programa grabado en su memoria. 2. Escritura. Para cargar un programa a le memoria de un PIC es importante haber generado un archivo con extensión .HEX desde el software compilador de nuestra preferencia (ASM, PIC C, MIKROBASIC, PIC BASIC, etc). Una vez creado vamos al menú File > Import HEX, y en la ventana que se muestra buscar el directorio
38

donde fue creado dicho archivo. Cuando lo encontramos solo procedemos a oprimir el botón Abrir.
Figura 3.3.4
Una vez realizado este paso tendremos el siguiente mensaje:
Figura 3.3.5Señal de que el archivo HEX fue importado con éxitoY en la sección de Program Memory
39

Figura 3.3.6
3. Oprimir el botón Write para descargar el código HEX al micro controlador. Al hacerlo se tiene la siguiente imagen en pantalla. Nota: cada vez que se importa un archivo HEX al micro controlador el que tenia anteriormente es sobre escrito por lo que no es necesario borrarlo, pero si fuera necesario solo se oprime el botón Erase para así limpiar por completo la memoria del PIC.
3.3.7 Programming Succseeful, cuando se muestra este mensaje el PIC ya tiene grabado el código en su memoria. Con lo que solo resta alimentar la tarjeta electrónica entrenadora al voltaje de alimentación y checar que el micro controlador cumpla con su tarea .
40

Es importante señalar que con este mismo programador se puede alimentar la tarjeta electrónica teniendo como salida un voltaje de 5V siempre y cuando el circuito a alimentar no exceda los250mA en consumo de corriente. Para ello solo se activa la casilla Check en la parte de
VDD Target como se muestra en la siguiente figura: Si también se tiene activada la casilla /MCLR la aplicación no funcionara dado que esta casilla corresponde al Master Clear el cual sirve para resetear el PIC.
3.4 Interfaz Bluetooth RN 41-42 La tarjeta entrenadora de Pic´s cuenta con tecnología de interfaz bluetooth este modulo se conecta a los pines Rx y Tx del microcontrolador para que tengan una comunicación serial, esto se logra activando la función USART del microcontrolador . En seguida de darán detalles de dicho dispositivo.
Bluetooth es un protocolo de comunicaciones bastante aceptado para redes WPAN (Wireless Personal Area Network, red inalámbrica de área personal), trabaja en la banda de 2.4GHz, tiene un bajo consumo de energía y su mayor utilidad es en la transferencia de datos. Los dispositivos bluetooth, figura 3.1, son muy utilizados en computadoras de escritorio, laptops, PDA´s y teléfonos celulares entre otros dispositivos.
Figura3.4
Al integrar bluetooth a SATEDU ampliamos el número de dispositivos a los cuales se puede conectar. Por ello, además de interactuar con computadoras, también podrá interactuar con PDA´s y teléfonos celulares. Una ventaja de este trabajo es que el Subsistema de Comunicaciones Inalámbricas pasará de usar dos tarjetas a usar solo una, lo cual contribuye también a reducir el costo del satélite educativo.
41

Existen muchos dispositivos bluetooth en el mercado pero para las necesidades de SATEDU se requieren las siguientes características en el circuito:
Pequeño, debido a que las tarjetas que se conectan en SATEDU tienen una dimensión de 8.9 x 8.9 centímetros.
Económico, siempre es un factor determinante en cualquier proyecto. Bajo consumo de energía, debido a que SATEDU funciona con baterías. Montaje superficial. Fácil de soldar. Compatible con el puerto serie, puesto que el BUS principal de SATEDU
utiliza este protocolo. Que tenga un alcance de por lo menos 10 metros; una forma de clasificar
los circuitos bluetooth es por su alcance, potencia de transmisión y sensibilidad de recepción. Existen clase 1, clase 2 y clase 3, el dispositivo elegido tiene que ser clase 1 o clase 2 ya que la clase 3 solo tiene un rango aproximado de operación de un par de metros.
En la búsqueda realizada en esta tesis, se encontraron muchos circuitos bluetooth, pero algunos no cumplían con todas las características buscadas, principalmente no eran fácil de soldar y la compatibilidad con el puerto serie era limitada, ya que solo era compatible con ciertas velocidades de transmisión. En este capítulo se describe el circuito elegido para la nueva tarjeta del Subsistema de Comunicaciones Inalámbricas.3.4.1 Circuito de Interfaz Bluetooth El circuito elegido para la interfaz bluetooth es el circuito RN-42 de la compañía Roving Networks, figura 2.5, este es un modem bluetooth de bajo consumo, económico y que puede añadir capacidad inalámbrica por interfaz bluetooth a SATEDU. El modem puede tener velocidades de transmisión hasta de 3 Mbps en distancias menores a 100 metros según datos del fabricante y entre sus aplicaciones principales tiene la de sustituir cables de tipo serial, que es exactamente lo que se necesita en este proyecto.Las características del circuito bluetooth son las siguientes: Es compatible con la versiones 1.1, 1.2, 2.0 y 2.1 de Bluetooth.
También es compatible con la versión 2.0+EDR lo que permite tener velocidades de hasta 3Mbps.
Empaquetado pequeño de 13.4mm x 25.8mm x 2mm.
Bajo consumo, con un máximo de 30 mA.
Interfaz de conexión de datos con UART (SPP y HCI) y USB (HCI).
Calificado Bluetooth SIG.
42

Fácil montaje en PCB.
Dispositivo Clase 1: Hasta 100 metros de distancia.
12 dBm en transmisión.
Sensibilidad de -80 dBm. Certificado FCC, ICS y CE
Tasas de transmisión desde 1200 bps hasta 921 Kbps.
Frecuencia de operación entre 2402 a 2480 MHz.
Modulación FHSS/GFSK, 79 canales en intervalos de 1 MHz.
Encriptación de 128 bits.
Corrección de errores para garantizar la entrega de paquetes.
Puede crear Piconets y Scatternet. 3.4.2 Arquitectura del Circuito Bluetooth A simple vista se puede ver un encapsulado y una antena en el circuito bluetooth. En el datasheet del circuito se encuentra el siguiente diagrama de bloques, figura 3.4.2:
Figura 3.4.2 arquitectura del circuito de bluetooth
CSR es una compañía que se dedica a diseñar y fabricar dispositivos de radio en un solo chip para el estándar bluetooth. En la figura 3.4, se muestra el diagrama bloques del BlueCore-04 External, este chip tiene integrados un microcontrolador, una memoria RAM, un DSP, interfaz de entrada y salida de datos con diferentes protocolos, una interfaz de Radio a 2.4 GHz y una memoria flash externa.
43

Figura 3.4.3 memoria flash La memoria RAM de 48 Kbytes permite una máxima transferencia de datos y la interfaz UART puede tener una velocidad de transmisión de 1.5 Mbaud; otras de sus características son las siguientes: Memoria flash externa de 8 Mbits.
Bluetooth v2.0 +EDR (se puede actualizar a versión 2.1).
Soporta Piconet y Scatternet.
Puede estar en el mismo ambiente que el estándar 802.11.
Con EDR Bluetooth se pueden transmitir imágenes de 1 Mb en 4 segundos.
Este chip es utilizado para controlar el envío y la recepción de datos, el microcontrolador se puede reprogramar por medio del puerto SPI y se utiliza
un entorno de desarrollo de CRS.El balun adapta la impedancia del transmisor con la impedancia de la antena. El amplificador permite un mayor alcance debido a que es un Bluetooth clase 1 y el switch de RF permite seleccionar entre transmisión y recepción.
44

Figura3.4.4 modulo bluetooth RN42
3.5.1 Detalles de Programación del Circuito Bluetooth Para la programación del circuito RN-41 se necesita una computadora con bluetooth (integrado o externo) o la conexión del circuito a un puerto serie que tenga la misma configuración que tiene por default. Una vez programada la configuración no cambiará (aunque se desconecte el circuito) hasta que la configuración sea cambiada o se restauren los valores de fábrica, por default la configuración del puerto serie del circuito es el que indica la tabla.
Tabla 3.5 detalles de programación
Lo primero que se tiene que hacer para programar el circuito es hacer el enlace entre el modulo bluetooth y la computadora, el nombre del circuito es “FireFlyXXXX”, la mayoría de los dispositivos que utilizan bluetooth requieren autenticación, el código por default del circuito es “1234”. Una vez realizado el enlace se le asignará al circuito un puerto COM y entrará en el modo de datos para envío y recepción de información, para la programación del circuito se necesita entrar al modo comando. Para entrar al modo comando se tienen que enviar tres signos de peso “$$$” desde la computadora a través del puerto serie asignado en los primeros 60 segundos después de encender el modulo, esté responderá con “CMD”, para salir
45

del modo comando se deben enviar tres signos de menos “---” y el modulo responderá con “END”. Cada uno de los caracteres enviados debe de estar en código ASCII. Los comandos validos obtienen “AOK” de respuesta, comandos no validos obtienen “ERR” y comandos que no se reconocen obtienen “?”. Para enviar los comandos se requiere el programa HyperTerminal, algún programa parecido o realizar una aplicación propia. Todos los comandos son de una o dos letras, no se distingue entre mayúsculas y minúsculas y están delimitados por una coma. El nombre del circuito y el código para autenticación distingue entre mayúsculas y minúsculas. Los comandos se dividen en 5 categorías: Set Commnads: Almacena información, los cambios no tienen efectos hasta reiniciar el modulo, ver tabla 3.5.1.
Tabla 3.5.1 Set de comandos
Action Commands: Realiza acciones como búsquedas, conexiones, etc.
En las tablas anteriores se muestran algunos comandos y una breve explicación de cada uno de ellos pero cabe aclarar que no son todos los comandos; si se requiere ver otro comando se debe consultar el manual de usuario.
46

La configuración de ciertos parámetros también se puede hacer por medio de un DIP switch por medio de la interfaz PIO, un uno lógico debe ser de 3 Volts y un cero debe ser 0 Volts, por medio de esta interfaz se pueden restablecer los valores de fábrica, ver la tabla 3.5.2.
Tabla 3.5.2 configuracion de parámetros 3.6.1 Dip traceEste software es utilizado para la elaboracion de los diagramas esquematicos asi como también para la realización del PCB. A continuación se da una breve explicación de la características mas primordiales para la elaboracion de un PCB. DipTrace es un estado-of-the-art sistema completo de diseño de PCB. Incluye:
Diseño de PCB - PCB con un diseño fácil de usar herramientas manuales de enrutamiento, trazador automático basado en la forma y auto-placer.
Esquema - Captura Esquemática con multi-nivel de la jerarquía y la exportación de PCB Layout, especias o Netlist.
Patrón de componentes y editores - le permiten hacer piezas nuevas y huellas. Librerías estándar - incluyen 100.000 piezas +. Vista previa 3D PCB - muestra el diseño en 3D. Modelos 2500 + paquetes 3D
se suministran con el programa. Paso a paso Tutorial - Aprende el software y comenzar el verdadero trabajo en
unas pocas horas. Con todas las funciones durante 30 días y 300 pines versiones gratuitas están
disponibles para su evaluación. Descuentos especiales para los usuarios sin fines de lucro y la educación .
DipTrace ofrece las siguientes características:
Fácil de aprender la interfaz de usuario Para diseñar un esquema, sólo tiene que seleccionar y colocar componentes en el documento y conectarlos entre sí utilizando el cable y herramientas de autobuses. Esquemas multihoja y jerárquicas son compatibles. A continuación, seleccione la opción de menú "Convertir a PCB para convertir el esquema para PCB. Layout se puede actualizar desde esquemática en unos pocos clics en cualquier momento. Al crear o editar objetos de diseño que se destacan para mejorar su trabajo. Paso a paso tutorialte guiará a través del proceso de diseño y permite empezar a trabajar con facilidad.
47

Las funciones inteligentes de colocación y la colocación auto- Después de la conversión Esquema de diseño de PCB, tablero lugar delinear y ordenar los componentes. A continuación, utilice la "colocación de lista" de los chips / conectores y auto-colocación de otros componentes para obtener un resultado aceptable en pocos minutos y empezar de enrutamiento.
Fácil de usar enrutamiento automático y manual de gran alcance PCB DipTrace software incluye 2 routers automáticos (Forma y basado en la red basada en-). Router forma es capaz de diseños de ruta compleja con componentes SMD así como tableros de una sola capa. Router Grid también se puede hacer de una sola capa con placas de cables de puente. Con specctra DSN / SES interfaz puede utilizar trazador automático externo basado en la forma o topológico. Manuales inteligentes herramientas de trazado le permite crear y editar trazos en un 90, 45 grados o sin ninguna limitación. Trazas curvas son compatibles. A través de, vías ciegas enterrados o se puede utilizar en automático y el enrutamiento manual. Tamaño de la placa no está limitado.
Funciones avanzadas de verificación Esquema de diseño de PCB y los módulos tienen varias características que ayudan a la precisión de verificación de control de proyectos en diferentes etapas de diseño: la función de ERC muestra los posibles errores en las conexiones de pines esquema utilizando las reglas definidas y le permite corregir errores, paso a paso. Función DRC comprueba la distancia entre los objetos de diseño, el tamaño mínimo de los tiros, y los ejercicios. Los errores se muestran gráficamente y se pueden fijar paso a paso y volver a ejecutar la RDC en un clic después de las correcciones. Compruebe la conectividad de red verifica si todas las redes de PCB están conectadas eléctricamente. Esta función utiliza las huellas, cobre verter zona llena y las formas de control de la conectividad, que comunica las redes rotas y se combina con los detalles de la zona. Comparando con el esquema permite comprobar si el enrutado de PCB es idéntico al Esquemático.
Creación de sus propias bibliotecas Editores de componentes y patrones permiten diseñar sus propios símbolos y modelos. Para crear componentes completos simplemente conectarlas entre sí mediante el Editor de componentes.
3.7.1 Diseño de la tarjetaEn este punto se da una breve explicación sobre los circuitos q se van a construir.
48

El proyecto que se va a implementar, como ya se ha mencionado es un entrenador para el pic 16F877A, el mismo que contendrá algunas aplicaciones para probar su funcionamiento.El entrenador dispondrá de:
Una comunicación serial via bluetooth Una pantalla de cristal liquido (LCD) Una etapa de potencia. leds indicadores del puerto B.
Todas estas etapas funcionaran unas dos tarjetas ya que la tarjeta de potencia fue construida independiente para poder ser acopladaA continuación se muestra una imagen donde se muestra una distribución general del pic.
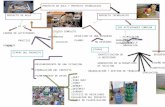
Figura3.7.1 conexión del reset general, oscilador y módulos de programación.
Para la alimentación de la tarjeta se usara una fuente de voltaje de CD que será regulada a 5vcd con un 7805.
Fig 3.7.2. Diagrama de fuente regulada a 5 volt
3.8.1 Etapa de potencia
49

Para el acoplamiento de las señales digitales del puerto B a la etapa de potencia se dispondrá de algunos elementos como son transistores, optoacopladores y relevadores que trabajar con una fuente de voltaje de 12vcd para que puedan funcionar correctamente.
Muchos sistemas digitales controlan a otros sistemas o realizan funciones de control tales que deben ser interconectados a una etapa de manejo de potencia, con base en TIRISTORES (triacs, SCR, etc.) para actuar sobre cargas resistivas o inductivas en sistemas de iluminación, o en procesos industriales o en control de velocidad de motores, entre otros.
El manejo de potencia, es decir la manipulación de altas corrientes, de hasta varios centenares de amperios, implica el tener consideraciones de seguridad eléctrica para los operarios y de protección para el sistema digital.
Es deseable que la interconexión entre ambas etapas (la digital y la de potencia) se haga por un medio de acoplamiento que permita aislar eléctricamente los dos sistemas. Esto se puede lograr con los dispositivos llamados OPTOACOPLADORES, mediante los cuales se obtiene un acoplamiento óptico y, al mismo tiempo, un aislamiento eléctrico. Por ello también se les conoce como OPTOAISLADORES. El acoplamiento se efectúa en el rango del espectro infra-rojo a partir de dispositivos emisores de luz, usualmente IRED (infra-rojo) LEDs (diodos emisores de luz), actuando como emisores y utilizando dispositivos detectores de luz (optodetectores), actuando como receptores.
La razón fundamental para llevar a cabo acoplamiento óptico y aislamiento eléctrico es por protección de la etapa o sistema digital ya que si ocurre un corto en la etapa de potencia, o cualquier otro tipo de anomalía eléctrica, el OPTOACOPLADOR protege toda la circuitería digital de control. El sistema digital puede variar entre un sistema discreto o un sistema de mayor integración (en escalas SSI, MSI, VLI o VLSI) o un sistema integrado programable a nivel de memorias o a nivel de dispositivos programables "inteligentes" (microprocesadores, microcontroladores, dispositivos lógicos programables, arreglos lógicos programables, controladores lógicos programables o computadores).
50

Figura3.8.1. Etapa de potencia de entrenador de pic
3.9.1Elaboracion del PCB.Para la realización del PCB (PRINTED CIRCUIT BOARD ), se utilizara la ayuda del programa DIP TRACE.Para comenzar se deben tener los esquemáticos o diagramas eléctricos de las distintas etapas como se menciono anteriormente, una vez teniendo todos los esquemáticos y asegurándose de que todas las conexiones estén bien realizadas y que el esquema se ha dibujado o diseñado en papel corresponde con el que se pretende realizar, se procederá a obtener el diseño del PCB. Y para ello se ingresa en la sección de file Convert to PCB para que abra el editor del PCB
Figura. Importacion de esquematico a PCB.
51

Como se puede observar en la figura anterior cuando se convierte el esquematico a PCB todo los componentes salen desalineados y en desorden ya que el software nos brinda la facilidad de poder ordenarlos a las necesidades de cada usuaria puesto que las aplicaciones con variadas.Para comenzar a alienar y poner en orden cada uno de los elementos se puede realizar de dos formas distintas una que es manual y otra es que el propio software los acomode, este ultimo no es muy recomendable ya que el DIP TRACE trata de reducir espacio e eso complica el ruteo de todas las vías y pads.Pero la instrucción para que lo haga automáticamente es la de component arrange vea la siguiente figura para ver ejemplo.
Figura. Instrucción component arrange 3.9.2 Ruteo de las vías Como se observa no es recomendable esta instrucción ya que los elementos no son colocados de acuerdo al circuito que se tiene planeado realizar.Es por ello que la mejor forma de colocarlos es de forma manual, pero esto atrae una desventaja la cual es que lleva demasiado tiempo en realizarlo.A continuación se muestra el ruteo manual y las pistas de las dos caras llamada TOP (vista superior), BOTTOM (vista inferior).
Figura.3.9.2 Ruteo de Vista Top.
52

Como se puede observar en la figura esta vista es la parte superior de la entrenadora además de que se observan todos los dispositivos así como sus pines de conexión. En la vista inferior se muestra como quedan las vías o las pistas por debajo de la entrenadora, vea la siguiente figura.
Fig.3.9.3 Ruteo de Vista Bottom
De esta forma es como queda la entrenadora del ruteo final y lista para la impresión a la tarjeta.
3.10.1 Elaboración del circuito impreso.
Una vez realizado el diseño del PCB lo siguiente es realizar el circuito impreso, y para ello se necesitaran los siguientes materiales:1 placa de baquelita de dos caras de cobre. 1 lija de metal # 500.Papel couche para la transferencia del PCB a la baquelita.Cloruro férrico. Taladro. Cautín. Recipiente de plástico, no metálico.Para la fabricación del circuito impreso se deberán seguir algunos pasos.
53

PASO 1: preparación de la placa la placa esta debe ser cortada a la medida exacta del diseño realizado, y debe ser lijada por sus dos caras para quitar un reducir un poco el cobre. PASO 2: obtención del circuito impreso en la placa y perforación de la misma.Para la obtención del as pistas se deberá imprimir el circuito del PBC en una impresora laser o de tóner en el papel couche, una vez realizada dicha operación se procede al transferir dicho impreso en la baquelita de cobre realizándolo por la técnica de planchado, es decir se colocara el impreso en una cara de la baquelita de cobre y utilizando una plancha común y corriente se aplicara calor directamente al papel para que el diseño de la tarjeta quede impreso en una cara de tablilla.El siguiente proceso de este paso es quitar el papel con suma precaución ya que si se retira demasiado rápido las pistas o vías se desprenderán del cobre, una recomendación para quitar el papel es bajo el chorro de agua ya que facilita el desprendimiento y no daña las pistas véase la siguiente figura.
Figura 3.10.1obtencion de circuito impreso en baquelita
Una vez concluido este proceso la tarjeta debe ser sumergida en el cloruro férrico para desprender todo el cobre sobrante de la tablilla.
54

Figura 3.10.2 Vista bottom del PCB.
Figura 3.10.3 Vista top del PCB
55

Capitulo 4Aplicación y validación de la propuestaDe mejora. 4.1 RESULTADOS Y DISCUSIÓN
La realización del proyecto ha favorecido significativamente los resultados del centro de sus actividades que incluyen la investigación de desarrollos tecnológicos e innovación proyectos. Debido a la motivación y aceptación por parte de los estudiantes del plantel así como de los docentes y autoridades que se encuentran laborando dentro de las instalaciones el proyecto de la tarjeta entrenadora tuvo un impacto tal que los propios estudiantes desean armar su propia tarjeta entrenadora.
Esto da como resultado impulsar la investigación dirigida a aéreas especificas y prioritarias para el alcance de la competencias requeridas por la institución, además de que se fomenta una mayor comunicación y divulgación acerca de todo lo relacionado con la ciencia y la tecnología.
Para el logro de los puntos antes mencionados se hizo uso de muchas herramientas ya que el proyecto consta de distintas etapas.
Durante la etapa de programación y puesta a punto del sistema, se utilizaron básicamente las herramientas MPLAB, que incidieron considerablemente en la obtención de los objetivos trazados. Estos programas fueron desarrollados para el trabajo con microcontroladores, y además de su facilidad de programación y uso, tienen la ventaja de complementarse facilitando el desarrollo de las aplicaciones.
Para la etapa de diseño de la propia tarjeta entrenadora, el software diptrace es un entorno integrado diseñado para la realización completa de proyectos de construcción de equipos electrónicos en todas sus etapas, es decir, diseño, simulación, depuración y construcción. Sus reconocidas prestaciones lo han convertido en el programa simulador más empleado en microcontroladores PIC, por encima de las herramientas que oferta el propio fabricante.
En este caso se empleó en mayor medida el entorno de diseño gráfico diptrace eschematic para esquemas electrónicos, que es extremadamente fácil de utilizar y está dotado de poderosas herramientas para viabilizar el trabajo del diseñador en combinación con MPLAB IDE. La utilización de ambas herramientas proporciona un porcentaje elevado de certeza de su correcto funcionamiento, lo cual ofrece gran confianza para pasar al proceso de grabación y montaje de todas las etapas con las que cuenta la entrenadora.
56

Capitulo VCOSTO BENEFICIO
5.1 Costo beneficio del proyecto.Para realizar una estimación del costo beneficio del proyecto, de han dividido los gastos del mismo en algunas etapas:Recursos de software y programador: software y programación para llevar a cabo la realización del proyecto pero que no forma parte constituyente de él.Componentes y fabricación del PCB: Costo de los componentes del circuito impreso y la fabricación del mismo.Recursos humanos: mano de obra necesaria para realizar el proyecto. El programador de la serie microprogramdor usb es similar al PICKIT de la empresa de microchip a diferencia de este, el microprogramador usb es de menor coste ya que fue realizado por Ingenieros Mexicanos.Concepto Costo
Microprogramador usb $ 450 MNX
Tabla 5.1 costo de programador El costo de los componentes y la fabricación del pcb, según el diseño especificado, estos costos estan compuestos por diversos costos de creación de los diseños y los impresos para la realización del PCB, además de los elementos y circuitos eléctricos y electrónicos que se montaron dentro del diseño implementado.Estos costos de pueen visualizar en la siguiente tabla (vér tabla 3).
Concepto Cantidad Precio unitarioDado en pesos mexicanos
Precio total Dado en pesos mexicanos
Resistencias 33 $1 peso $33 pesos
Condensadores 2 $.80 $1.60
Cristal de 4Mhz 1 $8.10 $8.10
Push button 1 $1.20 $1.20
Leds 10 $1.50 $15
LCD 16x2 1 $130 $130
Pic 16f877A 1 $93 $93
57

Regulador 7805 1 $15 $15
Relevador 12VCD
4 $25 $100
Tip 41 4 $10 $40
2n2222A 4 $8 $32
PCF 827 2 $14 $28
RN-41 1 $600 $600
Fenolica 2 $60 $60
total $1156
Tabla 5.1.1 costo de la fabricación de la tarjeta.
5.1.2 Costo del recurso humano Los recursos humanos para este caso se lo acreditara a la elaboración del circuito impreso, ya que esta parte no fue elaborada de la manera directa por las personas dedicadas al presente proyecto, las mismas que la mano de obra directa, no la están evaluando como costos adicionales, dicho de otro modo este se costea en horas. Ver tabla 5.1.2.
Concepto Horas
Diseño de PCB 24 horas
Tabla5.1.2 de costo de recurso humano.
5.1.3 Beneficio de innovaciónValor de innovación y nueva tecnología La innovación tecnológica afecta el modo en que una institución realiza su trabajo, cambia los objetivos estratégicos e incluso cambia el los puntos de vista de la propia institución así como de los estudiantes. Esta técnica considera el costo y el riesgo de innovar, atrae la incorporación de nuevas tecnologías.Pero la Incorporación de nueva tecnología como es el caso de la tarjeta entrenadora de para la programación de microcontroladores puede incrementar los costos o disminuirlos, Dependiendo del costo de la nueva tecnología en comparación con el del sistema al que reemplaza. La nueva tecnología también puede acarrear beneficios no monetarios, como mejoras en la prestación del servicio o en la transparencia. Es
58

conveniente realizar una evaluación en términos de costo-efectividad y de los potenciales beneficios como es el claro aprendizaje además de alcanzar la competencia requerida por la Institución educativa además de que se complementa ya que la competencia no hace mención de la construcción de PCB y acoplamiento de nuevas tecnologías e interfaces para la solución de problemáticas presentadas dentro del sector productivo y en la vida cotidiana.
La ventaja que genera la innovación en tecnología perdura hasta que los estudiantes adoptan la misma tecnología, con la ventaja de no haber tenido que experimentar y aprender de los propios errores por lo que es importante considerar la ventaja temporal entre que se implanta lanueva tecnología y el momento en que los alumnos la adoptan. En ese período esque el sector productivo debería capitalizar la inversión.Por lo tanto para tener éxito en la innovación se deben gestionar de distinta forma aquellos proyectos alineados a la estrategia actual de la enseñanza hacia aquellos que generan cambios con un impacto visualizado en el aprendizaje.
Esta tarjeta entrenadora puede parecer costosa en la etapa de implantación, pero puede ahorrar Tiempo y dinero a un largo plazo, especialmente cuando se encuentra una solución tecnológica de bajo costo para remplazar a una aplicación costosa y de baja tecnología.
Muchas soluciones tecnológicas digitales pueden representar costos significativamente mayores que los procedimientos analógicos a los que reemplazarían. No siempre es recomendable incorporar nueva tecnología cuando mejoras relativamente menores no justifiquen los costos adicionales.
59

Conclusiones.
Una de las ventajas de esta tarjeta entrenadora es que brinda una versatilidad, ya que si no se desea usar ninguna de las etapas construidas, se pueden utilizar de forma independiente todos los puertos de E/S para cualquier aplicación que se desee.
Esta tarjeta fue construida de forma que las etapas con las que costa puedan ser utilizadas de forma independiente como ya se ha menciono o en conjunto, como es el caso de la pantalla LCD, el modulo de comunicación serial ó la etapa de potencia.
Otra de las tecnologías agregadas y que es importante mencionar es la etapa de comunicación serial en base a un modulo de bluetooth especial para microcontroladores. Esta etapa nos permite comunicarnos de de forma inalámbrica ya que la mayoría de las veces esta comunicación es por medio cables. El modelo construido es de fácil entendimiento para todos los usuarios, puesto que es un modulo entrenador, además son puramente didácticos.
Con la ayuda de esta tarjeta entrenadora tiene la factibilidad de aprender a programar microcontroladores además de que satisface la necesidad primordial para la cual fue diseñada, y es que los alumnos alcancen una competencia satisfactoria para algunas de las materias que se les imparten además de que contribuye a la actualización de sistemas digitales no solo para los alumnos sino también para los docentes que imparten la materia de micros e interfaces. Como se menciono es una tarjeta modular, y por lo tanto si se le diseña una modulo adicional se le puede acoplar fácilmente debido a los conectores verticales que han sido integrados.
60

Anexos Anexo 1a.
Nombre pin Pin DescripciónRA0/AN0 2 E/S Digital o Entrada análoga 0.
RA1/AN1 3 E/S Digital o Entrada análoga 1.RA2/AN2 Vref - 4 E/S Digital o Entrada análoga 2.RA3/AN3/Vref + 5 E/S Digital o Entrada análoga 3.RA4/T0CKI 6 Bit 4 del puerto A (E/S bidireccional ). También se usa como entrada
de reloj al temporizador/contador TMR0. Salida de colector abierto.RA5/SS/AN4 7 E/S Digital o Entrada análoga 4. También lo usa el puerto serial
síncrono.RB0/INT 33 Bit 0 del puerto B (E/S bidireccional). Buffer E/S: TTL/ST. También se usa como entrada de interrupción externa (INT).
RB1 34 Bit 1 del puerto B (E/S bidireccional). Buffer E/S: TTLRB2 35 Bit 2 del puerto B (E/S bidireccional). Buffer E/S: TTLRB3/PGM 36 Bit 3 del puerto B (E/S bidireccional). Buffer E/S: TTL (Programación
en bajo voltaje)RB4 37 Bit 4 del puerto B (E/S bidireccional). Buffer E/S: TTL. Interrupción por
cambio del pin.RB5 38 Bit 5 del puerto B (E/S bidireccional). Buffer E/S: TTL. Interrupción por
cambio del pin.RB6/PGC 39 Bit 6 del puerto B (E/S bidireccional). Buffer E/S: TTL/ST.
Interrupción por cambio del pin. Entrada de reloj para programación serial.RB7/PGD 40 Bit 7 del puerto B (E/S bidireccional). Buffer E/S: TTL/ST. Interrupción por cambio del pin. Entrada de datos para programación serial.RC0/T1OSO/
T1CKI15 E/S Digital. Salida del oscilador Timer 1 o entrada de reloj Timer 1.
RC1/T1OSI/CCP2 16 E/S Digital. Entrada del oscilador Timer 1. Entrada Captura 2; Salida Compara2; Salida PWM 2RC2/CCP1 17 E/S Digital. Entrada Captura 1; Salida Compara 1; Salida PWM 1
RC3/SCK/SCL 18 E/S Digital. Línea de reloj serial asíncrono en el modo SPI y el modo I²CRC4/SDI/SDA 23 E/S Digital. Línea de datos en el modo SPI o en el modo I²CRC5/SDO 24 E/S Digital.RC6/TX/CK 25 E/S Digital. Transmisión asíncrona (USART) o reloj síncrono (SSP).RC7/RX/DT 26 E/S Digital. Recepción asíncrona (USART) o línea de datos (SSP).VDD 11,32 Voltaje de alimentación DC (+)VSS 12,31 Referencia de voltaje (GND).
MCLR1 Entrada de RESET al microcontrolador. Voltaje de entrada
durante la programación. En nivel bajo resetea el microcontrolador.OSC1/CLKIN 13 Entrada oscilador cristal oscilador / Entrada fuente de reloj externa.
OSC2/CLKOUT 14 Salida oscilador cristal. Oscilador RC: Salida con un ¼ frecuencia OSC1RD0/PSP0 19 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RD1/PSP1 20 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RD2/PSP2 21 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RD3/PSP3 22 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RD4/PSP4 27 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RD5/PSP5 28 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RD6/PSP6 29 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RD7/PSP7 30 E/S Digital. Puede ser puerto paralelo en bus de 8 bits.RE0/RD/AN5 8 E/S Digital. Puede se pin de lectura (read) en modo microprocesador.RE1/WR/AN6 9 E/S Digital. Puede ser pin de escritura (write) en modo
microprocesador.RE2/CS/AN7 10 E/S Digital. Puede ser pin de selección de chip (chip select)
en modo microprocesador.
61

ANEXO 1.b Programa demo ;; PROGRAMA QUE REALIZA UNA SECUENCIA TEMPORIZADA ;;;;CON APLICACION A MOTORES DE DE C.A ;;
LIST P = 16F877A#INCLUDE<P16F877A.INC>__CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON &
_BODEN_OFF & _HS_OSC & _LVP_OFF
VAR_1 EQU 0X7FVAR_2 EQU 0X7EVAR_3 EQU 0X7DVAR_4 EQU 0X7CVAR_5 EQU 0X7B
ORG 0X0000
GOTO INICIO
ORG 0X00004
INICIO ;SELECCIONA BANCO 1BSF STATUS,RP0BCF STATUS,RP1MOVLW H'FF'MOVWF TRISB ;PORTB COMO ENTRADASCLRF TRISC ; PORTC COMO SALIDAS
;SELECCIONA BANCO 0BCF STATUS,RP1BCF STATUS,RP0
PROGRAMA BCF PORTC,5BSF PORTC,7MOVLW D'2'MOVWF VAR_3
SECUENCIA
62

BTFSC PORTB,0 ;STARTGOTO PRENDE GOTO SECUENCIA
PRENDEBTFSS PORTB,0GOTO PRENDE
MOTOR_1BSF PORTC,0 ;ON MOTOR 1CALL RETARDO BCF PORTC,0 CALL RETARDOGOTO MOTOR_2MOTOR_2
BSF PORTC,1 ; ON MOTOR 2CALL RETARDO
BCF PORTC,1 ;APAGA MOTOR 2CALL RETARDO
GOTO MOTOR_1BSF PORTC,2 ; ON MOTOR 3
CALL RETARDOBCF PORTC,2 ; OFF MOTOR 3 BCF PORTC,6CALL RETARDOBCF PORTC,1 ; OFF MOTOR 2;BSF PORTC,6CALL RETARDOBCF PORTC,0 ; OFF MOTOR 1BCF PORTC,6CALL RETARDODECFSZ VAR_3,FGOTO PRENDEGOTO PROGRAMA
STOP BTFSC PORTB,1 ;STOP GOTO STOP GOTO PROGRAMA
APAGA
63

CLRF PORTCBSF PORTC,6GOTO SECUENCIA
RETARDOMOVLW D'10'MOVWF VAR_5
TIEMPOMOVLW D'5' ;50MOVWF VAR_4
OTROMOVLW D'255' ;200MOVWF VAR_2
ESPERAMOVLW D'255' ;255MOVWF VAR_1
TARDE BTFSC PORTB,1 ;STOP GOTO PROGRAMA DECFSZ VAR_1 GOTO TARDE DECFSZ VAR_2 GOTO ESPERA
DECFSZ VAR_4 GOTO OTRO
DECFSZ VAR_5 GOTO TIEMPO
RETURN END
64

BIBLIOGRAFIA
Angulo J.M y Angulo Ignacio.(1997)Microcontroladores PIC. Diseño Práctico de Aplicaciones. McGraw-Hill. p.157 - 226.
Angulo J.M. y Angulo I. Diseño Práctico de Aplicaciones. Electrónica, 5 (10) p 32-45.Septiembre de 1997
Brown Marty. (2004). Guidelines forSoldering Surface Mount Components to PC Boards. Application note 7528, pp.1-3.USA. Fairchild semiconductor Corporation. Disponible desde: http://www.fairchild semiconductor. [Acceso 23 febrero de 2013].
BrownMarty. (1999). Considerations in Designing the Printed Circuit Boards of Embedded Switching Power Supplies. USA.Fairchild semiconductor Corporation.Disponible desde: http://www.fairchild semiconductor. [Acceso 5 de marzo de 2013].
Higuera R. D. (2002). Circuitos Impresos. Departamento deIngeniería Eléctrica y Electrónica. Tecnológico de Monterrey. Merrill p 78-132.
Mazidi Ali. (1992). Embedded Control Handbook, Microchip Technology Incorporated. Ed. Microchip. p202-239.Disponible desde: http://www.saberelectronica.com.1234-html [Acceso 26 de febrero de 2013].
McKinlayRolin.(2011) Manuales de usuario de Micro’PIC Trainer y de las tarjetas de prototipo PIC 16.Microsystems Engineering Micro’Pic Trainer. Disponible desde: http://www.microchip.com. [Acceso 17 de Marzo]
Pearman John A. Programming 16-Bit PIC Microcontrollers in C: Learningto Fly the PIC 16, Programming 32-bit Microcontrollers in. p.78-94. Disponible desde: http://www.saberelectronica.com.1234-html [Acceso 22 de marzo de 2013]
Pérez, C.(1986): Las nuevas tecnologías una visión de conjunto. En laTercera Revolución Industrial. Grupo Editor Latinoamericano. P 254-278.
65

Reese Robert.(1996)TECHNICAL LIBRARY. Microchip, The Embedded ControlSolutionsCompany.P.56-71.Disponible desde:http://www.microchip2.comIBERCOMP http://www.ibercomp.esMicrocontroladores [Acceso 6 de febrero de 2013].
66