PROGRAMA DE TEORÍA-PROBLEMAS DE LA...
33
Grado en Ingeniería Geomática y Topografía Escuela Técnica Superior de Ingenieros en Topografía, Geodesia y Cartografía PROGRAMA DE TEORÍA-PROBLEMAS DE LA ASIGNATURA: REDES FOTOGRAMÉTRICAS Septiembre 2014 Universidad Politécnica de Madrid Profesora: Isaura Alonso Martinez Profesor: Francisco García Cepeda Profesor: Pedro Miguelsanz Muñoz
Transcript of PROGRAMA DE TEORÍA-PROBLEMAS DE LA...
Grado en Ingeniería Geomática y Topografía
Escuela Técnica Superior de Ingenieros en Topografía, Geodesia y Cartografía
PROGRAMA DE TEORÍA-PROBLEMAS DE LA ASIGNATURA:
REDES FOTOGRAMÉTRICAS
Septiembre 2014
Universidad Politécnica de Madrid
Profesora: Isaura Alonso Martinez
Profesor: Francisco García Cepeda
Profesor: Pedro Miguelsanz Muñoz

Edward Mikhail, James Bethel, Chris McGlone: Introduction to Modern Photogrammetry, (2001)
José L. Lerma García: Fotogrametría Moderna: Analítica y Digital, (2002)
Paul R. Wolf, Bon A. Dewitt : Elements of Photogrammetry (2000)
Karl Kraus: Photogrammetry: Geometry from images and Laser Scans, (2007)
Toni Schenk : Fotogrametría digital , (2002)
Rainer Sandau: Digital Airborne Camera, (2010)
Asignatura de Redes Fotogramétricas: BIBLIOGRAFÍA
Tema 2. -Introducción a la triangulación aérea.
2.1. -Principios de la triangulación aérea.
2.2. -Fases del proceso de la triangulación aérea.
2.3. -Clasificación de los métodos de triangulación aérea.
Teoría. Unidad Didáctica 2: Redes Fotogramétricas

Teoría. Unidad Didáctica 2: Objetivos específicos
• Definir y calcular los parámetros que determinan la geometría de un vuelo con fines fotogramétricos .
• Asociar los sistemas de coordenadas de una imagen/es con los procesos de orientación interna y externa.
• Definir y calcular un trabajo de triangulación aérea clásica .
• Identificar y explicar los resultados de triangulación aérea clásica .
• Conocer y calcular, si se dispone de datos adicionales INS/GNSS, las ventajas/inconvenientes en un trabajo de triangulación aérea.
• Definir y calcular un trabajo de triangulación aérea automática.
• Conocer y aplicar las estrategias de búsqueda automática de puntos homólogos sobre imágenes adyacentes .
• Conocer y aplicar los procedimientos automáticos de orientación externa indirecta.
• Conocer los procedimientos de cálculo de la orientación externa directa.
Tema 2. Introducción a la triangulación aérea: Principios de la triangulación aérea
Introducción. Antecedentes aerotriangulación.
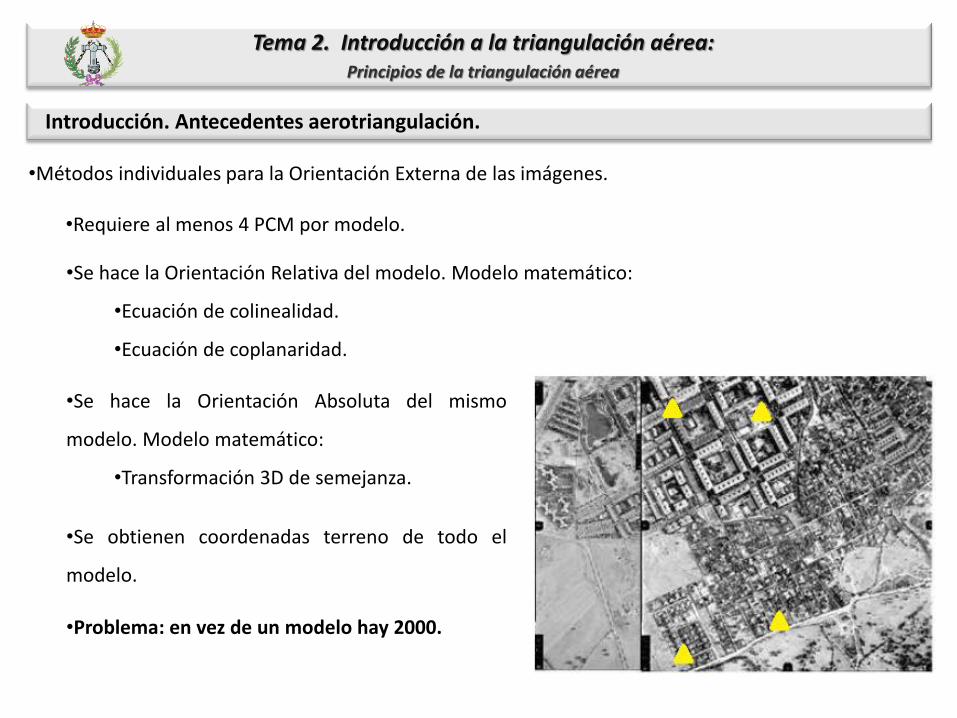
•Métodos individuales para la Orientación Externa de las imágenes.
•Se hace la Orientación Relativa del modelo. Modelo matemático:
•Ecuación de colinealidad.
•Ecuación de coplanaridad.
•Se hace la Orientación Absoluta del mismo
modelo. Modelo matemático:
•Transformación 3D de semejanza.
•Requiere al menos 4 PCM por modelo.
•Se obtienen coordenadas terreno de todo el
modelo.
•Problema: en vez de un modelo hay 2000.

Tema 2. Introducción a la triangulación aérea: Principios de la triangulación aérea
Introducción. Antecedentes aerotriangulación.
•Métodos colectivos o de ajuste en bloque para la Orientación Externa de las imágenes.
•Se apoya 1 modelo de cada 4 ó 5 midiendo al menos 4 PCM.
•Se miden PCm para que redunden en la resolución del sistema de ecuaciones.
•Ventajas:
•Ahorro en el número de
PCM y por tanto de dinero.
•Reducción de los
plazos de entrega.
Tema 2. Introducción a la triangulación aérea: Principios de la triangulación aérea
Introducción.
• Los puntos de control del terreno suponen un gasto importante en el proyecto de ejecución de una
determinada cartografía o producción de ortoimagen a partir de un vuelo fotogramétrico.
• La “triangulación aérea” es la técnica que permite establecer la geometría de enlace necesaria, entre
los sucesivos modelos estereoscópicos, reduciendo significativamente el número de puntos de control
mayor y por tanto los gastos que se derivan de ellos.
• Es el método más utilizado para determinar indirectamente la orientación externa del conjunto de
imágenes que conforman el bloque fotogramétrico.

Tema 2. Introducción a la triangulación aérea: Principios de la triangulación aérea
Definición.
• Método para la determinación de la Orientación Externa utilizando modelos matemáticos que se
aplican a las imágenes de forma individual o por modelos estereoscópicos.
• De forma individual: se relaciona el SR de Fotocoordenadas y el SR de Coordenadas Terreno (X,Y,Z)
utilizando puntos de control mayor y menor que se miden sobre la imagen (x,y).
• Por modelos estereoscópicos: se relaciona el SR de coordenadas modelo y el SR de coordenadas
terreno (X, Y, Z) utilizando puntos de control mayor y menor que se miden en el modelo.
• La triangulación aérea es la resección espacial simultánea de múltiples imágenes y la intersección
espacial de los haces de rayos, registrados por una cámara métrica aérea. La proyección de los rayos
conjugados de las imágenes, desde dos o más fotografías con recubrimiento, intersectan en puntos
comunes en el terreno, definiendo de esta forma las coordenadas espaciales tridimensionales de dichos
puntos. La correspondencia de los rayos de la imagen se adapta a la geometría de los puntos de control
terreno (puntos de Control Mayor), mediante el modelo matemático adecuado de ajuste.
• Una vez realizada esta fase, las coordenadas desconocidas de cualquier punto del terreno/objeto
se determinan por la propia intersección de los rayos ajustados de la imagen.

Tema 2. Introducción a la triangulación aérea: Principios de la triangulación aérea
Propósito.
• La finalidad de la triangulación aérea es la extensión del control horizontal y vertical, Puntos de Control
menor (PCm), a partir de un número mínimo de Puntos de Control Mayor PCM.
• Los puntos de control menor (PCm) se utilizarán para la orientación externa de los modelos
fotogramétricos o de las imágenes individuales.
Enlace con los puntos de control terreno/objeto.
• La triangulación aérea es un método de interpolación capaz de extender los puntos de control entre
áreas del terreno perfectamente orientadas y unidas a través de la orientación externa de las
correspondientes imágenes.
• Los PCM estarán ubicados al principio y final, caso de una pasada o a lo largo del perímetro de la
geometría definida por el bloque. Por otro lado, cada 4 o 5 modelos es aconsejable dotar del
correspondiente control, concediendo robustez y homogeneidad del interior de la pasada o bloque.
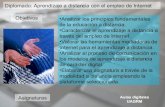
• Nunca servirán aquellos enlaces de zonas que provengan de la extrapolación respecto a la superficie
cubierta por los PCM que han servido para el cálculo. Ver figura siguiente:

Tema 2. Introducción a la triangulación aérea: Principios de la triangulación aérea
Esta situación debe ser evitada cuando se lleva a cabo el diseño del apoyo de
campo.
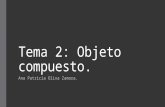
Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
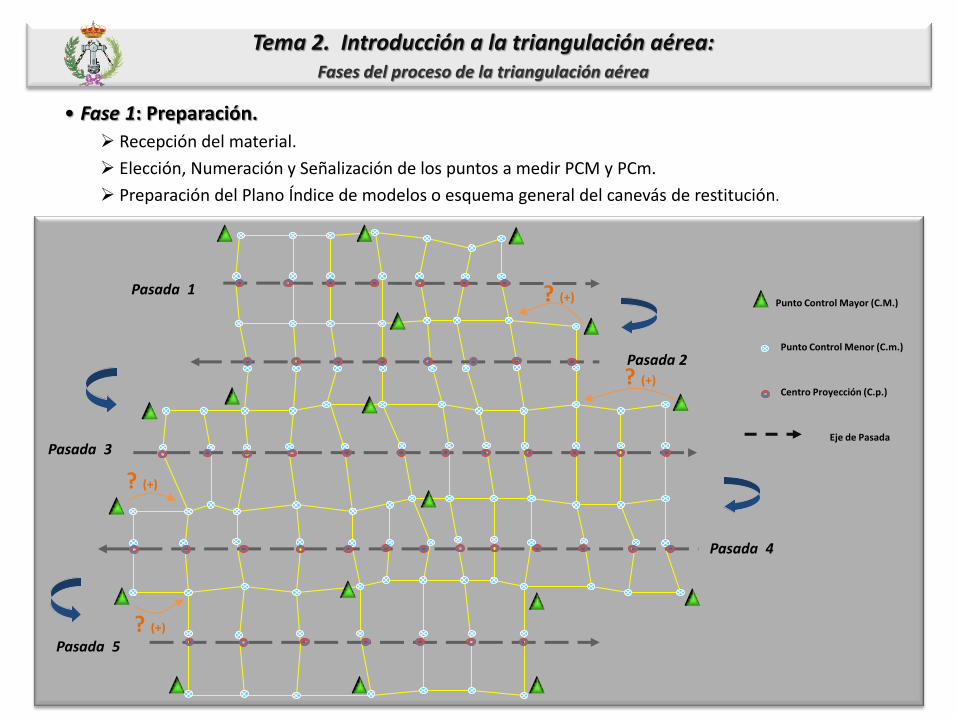
Pasada 1
Pasada 2
Pasada 3
Pasada 4
Pasada 5
? (+)
? (+)
? (+)
? (+)
Punto Control Mayor (C.M.)
Punto Control Menor (C.m.)
Centro Proyección (C.p.)
Eje de Pasada
• Fase 1: Preparación.
Recepción del material.
Elección, Numeración y Señalización de los puntos a medir PCM y PCm.
Preparación del Plano Índice de modelos o esquema general del canevás de restitución.

Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
• Fase 1: Preparación.
Recepción del material.
Elección, Numeración y Señalización de los puntos a medir PCM y PCm.
Preparación del Plano Índice de modelos o esquema general del canevás de restitución.

Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
P.A. 321
Imagen digital
Puntos de apoyo
Restituidor digital y operador
Identificación de los puntos
Coordenadas píxel como resultado de la medida
• Fase 2: Medición.
Preparación del equipo de medida, software…
Preparación de datos: importación de imágenes, definición del proyecto de AT, recopilación del fichero de puntos de control mayor PCM…
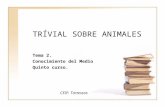
Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
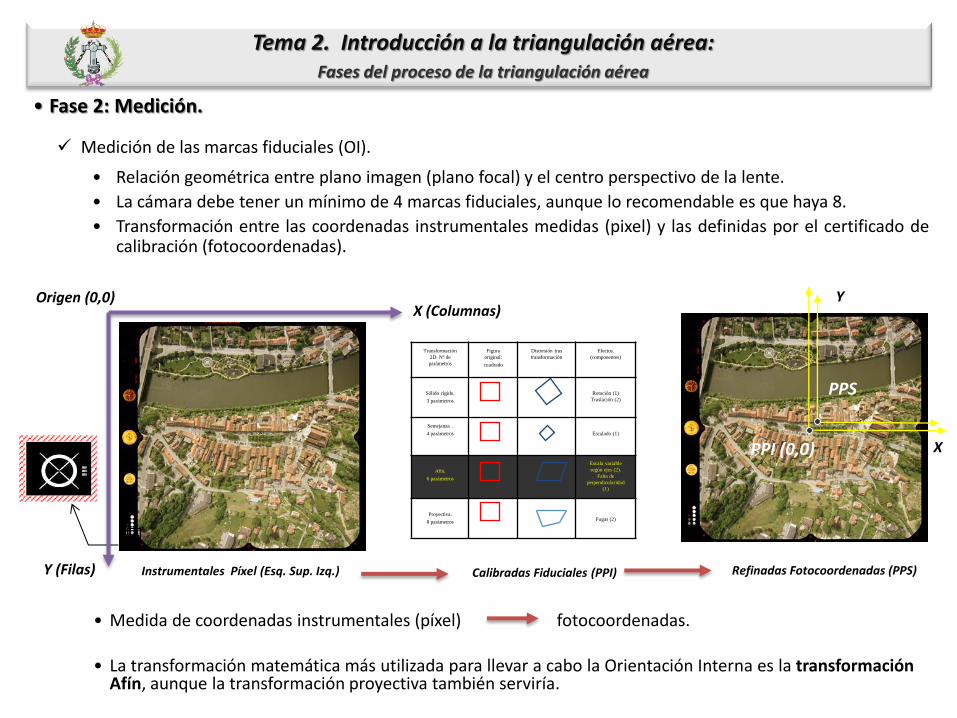
• Medida de coordenadas instrumentales (píxel) fotocoordenadas.
X (Columnas)
Y (Filas)
Origen (0,0) Y
PPI (0,0)
Instrumentales Píxel (Esq. Sup. Izq.) Calibradas Fiduciales (PPI)
PPS
Refinadas Fotocoordenadas (PPS)
Transformación
2D. Nº de
parámetros
Figura
original:
cuadrado
Distorsión tras
transformación
Efectos.
(componentes)
Sólido rígido.
3 parámetros
Rotación (1)
Traslación (2)
Semejanza .
4 parámetros
Escalado (1)
Afín.
6 parámetros
Escala variable
según ejes (2).
Falta de
perpendicularidad
(1)
Proyectiva.
8 parámetros
Fugas (2)
X
Medición de las marcas fiduciales (OI).
• Fase 2: Medición.
• Relación geométrica entre plano imagen (plano focal) y el centro perspectivo de la lente.
• La cámara debe tener un mínimo de 4 marcas fiduciales, aunque lo recomendable es que haya 8.
• Transformación entre las coordenadas instrumentales medidas (pixel) y las definidas por el certificado de calibración (fotocoordenadas).
• La transformación matemática más utilizada para llevar a cabo la Orientación Interna es la transformación Afín, aunque la transformación proyectiva también serviría.
Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
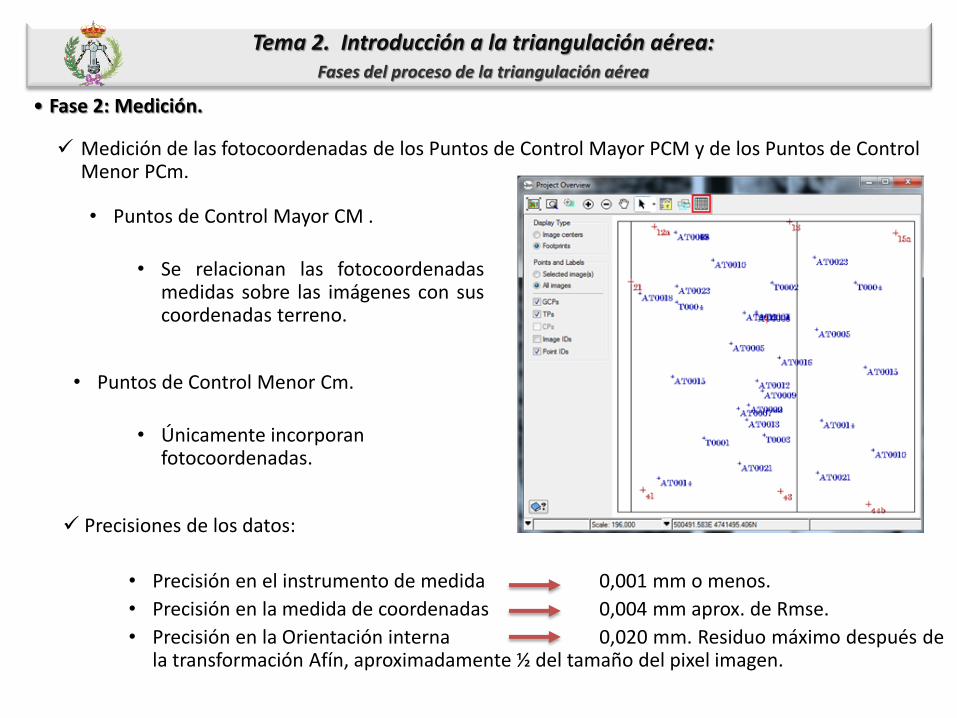
• Precisión en el instrumento de medida 0,001 mm o menos.
• Precisión en la medida de coordenadas 0,004 mm aprox. de Rmse.
• Precisión en la Orientación interna 0,020 mm. Residuo máximo después de la transformación Afín, aproximadamente ½ del tamaño del pixel imagen.
• Fase 2: Medición.
Precisiones de los datos:
• Puntos de Control Mayor CM .
• Puntos de Control Menor Cm.
Medición de las fotocoordenadas de los Puntos de Control Mayor PCM y de los Puntos de Control Menor PCm.
• Se relacionan las fotocoordenadas medidas sobre las imágenes con sus coordenadas terreno.
• Únicamente incorporan fotocoordenadas.

Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
• Se hacen coincidir los puntos comunes entre las unidades básicas mediante la intersección relativa entre ellas, para luego establecer la coincidencia de estas unidades con el terreno.
Fase 3: Cálculo y ajuste.
• Esta coincidencia se realiza minimizando los residuos de los enlaces relativos y absolutos mediante el principio de los MMCC.
• Para este propósito se utilizan las diferencias relativas entre los PCm que son comunes y los errores absolutos que existen entre las coordenadas de los PCM, en el sistema de referencia y las medidas en el sistema de la unidad básica.
• Para llevar a cabo una aerotriangulación se deberá disponer de los siguientes datos de partida:
• Fichero de fotogramas con las fotocoordenadas de los PCM y losPCm. • Fichero de coordenadas terreno de los PCM. • Datos aproximados de OE procedente de un sistema INS/GNSS. Esto es opcional.
Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
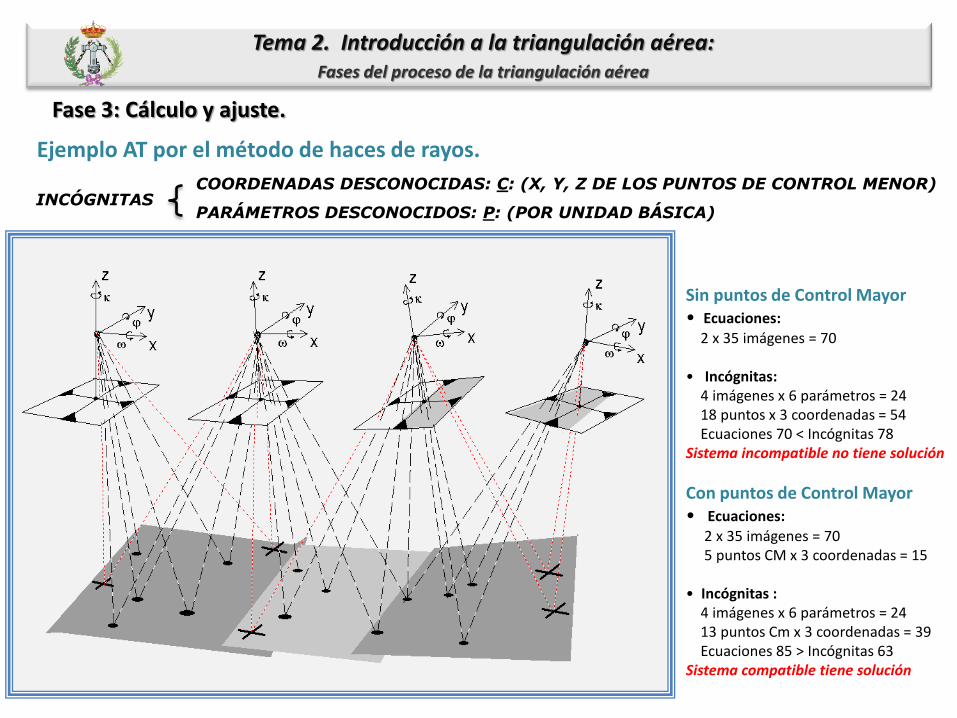
INCÓGNITAS
COORDENADAS DESCONOCIDAS: C: (X, Y, Z DE LOS PUNTOS DE CONTROL MENOR)
PARÁMETROS DESCONOCIDOS: P: (POR UNIDAD BÁSICA)
Sin puntos de Control Mayor • Ecuaciones: 2 x 35 imágenes = 70 • Incógnitas: 4 imágenes x 6 parámetros = 24 18 puntos x 3 coordenadas = 54 Ecuaciones 70 < Incógnitas 78 Sistema incompatible no tiene solución
Con puntos de Control Mayor • Ecuaciones: 2 x 35 imágenes = 70 5 puntos CM x 3 coordenadas = 15 • Incógnitas : 4 imágenes x 6 parámetros = 24 13 puntos Cm x 3 coordenadas = 39 Ecuaciones 85 > Incógnitas 63 Sistema compatible tiene solución
Fase 3: Cálculo y ajuste.
Ejemplo AT por el método de haces de rayos.

Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
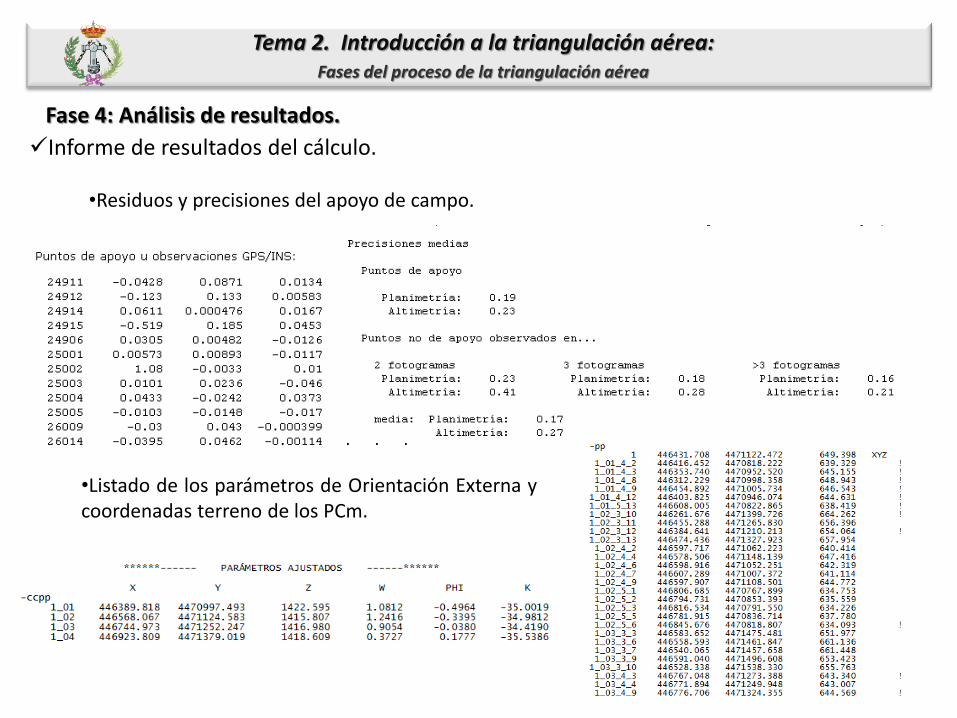
Fase 4: Análisis de resultados.
Informe de resultados del cálculo.
• Residuos por imagen de las fotocoordenadas de los puntos de control y de enlace medidos, expresados en micras.
•El informe debe indicar las unidades de los residuos. •Indicará de alguna manera aquellos residuos que sean elevados.
Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
Fase 4: Análisis de resultados.
Informe de resultados del cálculo.
•Residuos y precisiones del apoyo de campo.
•Listado de los parámetros de Orientación Externa y coordenadas terreno de los PCm.

Tema 2. Introducción a la triangulación aérea: Fases del proceso de la triangulación aérea
Fase 4: Análisis de resultados.
• Salida gráfica con los resultados del cálculo.

Tema 2. Introducción a la triangulación aérea: Diagrama de flujo de la triangulación aérea

Tema 2. Introducción a la triangulación aérea: Formación y ajuste de bloques en la triangulación aérea

Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea
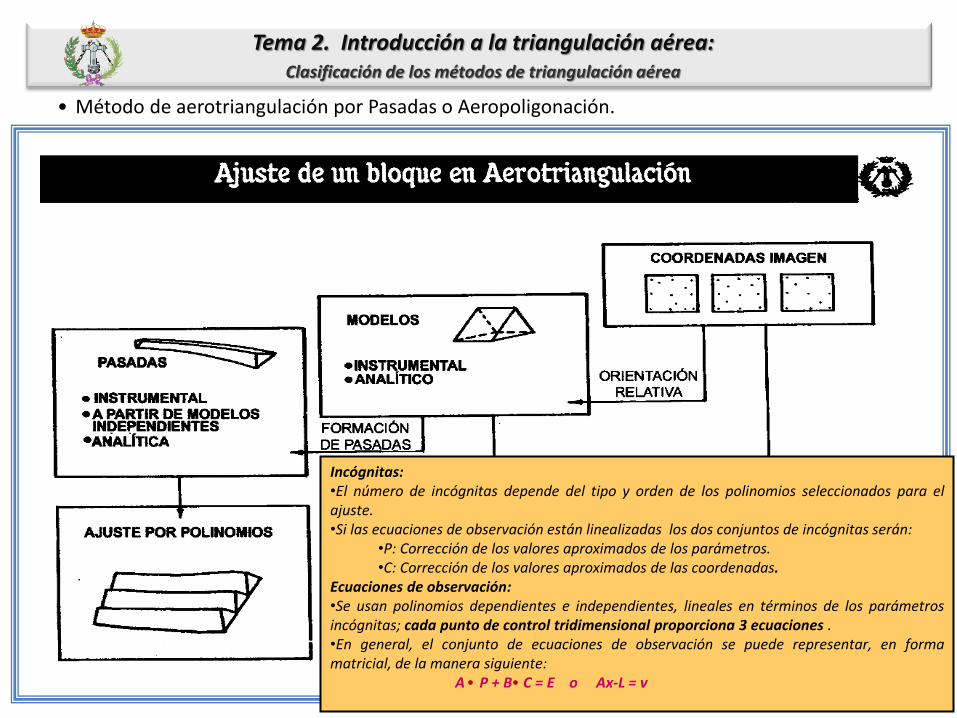
• Método de aerotriangulación por Pasadas o Aeropoligonación.
X = a0 + a1x + a2y + a3x2 + a4xy + a5y2 + a6x3 + a7x2y + a8xy2 + a9y3
Y= b0 + b1x + b2y + b3x2 + b4xy + b5y2 + b6x3 + b7x2y + a8xy2 + b9y3
Z = c0 + c1x + c2y + c3x2 + c4xy + c5y2 + c6x3 + c7x2y + c8xy2 + c9y3
Preparación y medida de coordenadas
Transformación del sistema píxel al sistema de coordenadas fiduciales
Refinamiento de coordenadas
Determinación de los parámetros de la orientación relativa
Cálculo de las coordenadas modelo
Formación de la pasada
Ajuste de la pasada
Formación y ajuste del bloque al sistema de referencia
Fases del proceso
1
2
3
4
5
6
7
• La metodología de proceso es la siguiente:
• El modelo matemático empleado es el polinomial.
• La mayoría de los polinomios utilizados para el ajuste
de la formación de pasadas por triangulación aérea
son variaciones de estas ecuaciones.
• La unidad es la pasada.
topografia
Nota adhesiva
30 incognitas por pasada, diez ''a'', diez ''b'' y diez ''c''
Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea
Incógnitas: •El número de incógnitas depende del tipo y orden de los polinomios seleccionados para el ajuste. •Si las ecuaciones de observación están linealizadas los dos conjuntos de incógnitas serán:
•P: Corrección de los valores aproximados de los parámetros. •C: Corrección de los valores aproximados de las coordenadas.
Ecuaciones de observación: •Se usan polinomios dependientes e independientes, lineales en términos de los parámetros incógnitas; cada punto de control tridimensional proporciona 3 ecuaciones . •En general, el conjunto de ecuaciones de observación se puede representar, en forma matricial, de la manera siguiente: A P + B C = E o Ax-L = v
• Método de aerotriangulación por Pasadas o Aeropoligonación.

Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea
• Método de aerotriangulación por Pasadas o Aeropoligonación.
11
9 8 7
10
4 3
2
1
5
6
21
2
210
21
2
210
2
2
xyayaxbxbbY
xybybxaxaaX
Ecuaciones polinómicas para planimetría
Punto Control Mayor
Punto control menor
El ejemplo tendrá 34 ecuaciones y 28 incógnitas
topografia
Nota adhesiva
6 incognitas por pasada(x 3 pasadas)=18+ 5 de puntos de control menor(x 2, planimetria) =10, total 28

2
1
0
2
1
0
2
2
120
201
b
b
b
a
a
a
xxxyy
xyyxx
Y
X
Y
X
b
b
b
a
a
a
xxxyy
xyyxx
10
01
120
201
0
0
2
1
0
2
1
0
2
2
Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea
Para un punto de control mayor
Ecuaciones de observación:
A i, j Pj = C1
A i, j Pj
I C1
Pj
0
A i, j Pj – I C1 = 0 Las ecuaciones de observación para un punto de control menor i
situado sobre la fotografía j son de la forma:
A i, j

La estructura de las ecuaciones de observación será:
A1,1
A2,1
A3,1 -I
A4,1 -I
A5,1
A3,2 -I
A4,2 -I
A5,2
A6,2
A7,2 -I
A8,2 -I
A9,2 -I
A7,3 -I
A8,3 -I
A9,3 -I
A10,3
A11,3
34
ecu
aci
on
es
28 incgs
P1
P2
P3
C3
C4
C7
C8
C9
C1
C2
0
0
C5
0
0
C5
C6
0
0
0
0
0
0
C10
C11
topografia
Nota adhesiva
P punto de control mayorCpunto de control menor

-AT 3
,1
-AT 4
,1
-AT 3
,2
-AT 4
,2
-A
T 7,2
-AT 8
,2
-AT 9
,2
-AT 7
,3
-AT 8
,3
-AT 9
,3
-A3,1 -A3,2 2I
-A4,1 -A4,2 2I
-A7,2 -A7,3 2I
-A8,2 -A8,3 2I
-A9,2 -A9,3 2I
5,4,3,2,1
1,1,
i
AA i
T
i
11,10,9,8,7
3,3,
i
AA i
T
i
9,8,7,6,5,4,3
2,2,
i
iAT
iA
P1
P2
P3
C3
C4
C7
C8
C9
0
0
0
0
0
k
T
k CA 1,
k
T
k CA 2,
k
T
k CA 3,
K= 1,2,5
K= 5,6
K= 10,11
AT A X = AT L
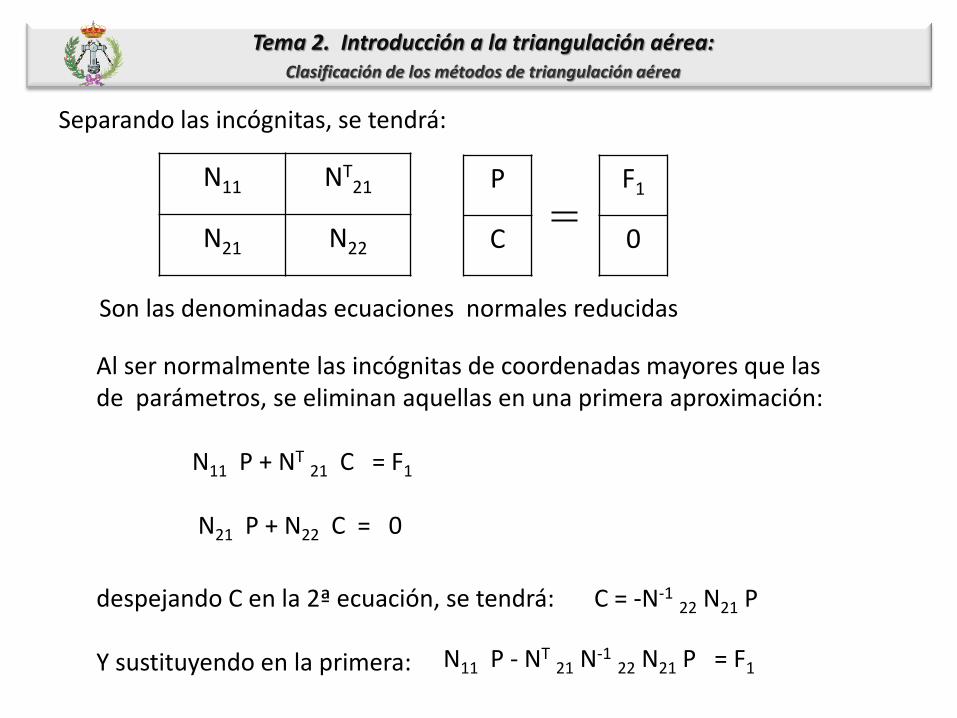
N11 NT21
N21 N22
P
C
F1
0
Separando las incógnitas, se tendrá:
Al ser normalmente las incógnitas de coordenadas mayores que las de parámetros, se eliminan aquellas en una primera aproximación: N11 P + NT 21 C = F1
N21 P + N22 C = 0
C = -N-1 22 N21 P despejando C en la 2ª ecuación, se tendrá: Y sustituyendo en la primera: N11 P - NT 21 N-1 22 N21 P = F1
Son las denominadas ecuaciones normales reducidas
Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea

Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea
1. Secuencial
2. Simultáneo
Fases del proceso de cálculo Método M-43
Ajuste Planimétrico
Transformación del resto de puntos
en cada modelo
Formación de las ecuaciones de observación (no requieren valores aproximados las incógnitas):
Xi = ax – by + Tx
Yi = bx-ay + Ty
Transformación del resto de puntos:
xi = ax - by + Tx
yi = bx - ay + Ty
zi = √a2 + b2 + Tz
Ajuste altimétrico
Formación de las ecuaciones de observación:
Xi - xi = z ∆
Yi - yi = -z ∆
Zi – zi = y ∆ - x ∆ + Tz
Solución de las ecuaciones normales :
∆ , ∆, Tz
• Método de aerotriangulación por Modelos Independientes.
2.1 Formación del modelo.
2.2 Formación del bloque.
2.3 Ajuste del bloque
1.1 Formación del modelo.
1.2 Formación de la pasada
1.3 Formación del bloque
1.4 Ajuste del bloque
• La unidad es el modelo estereoscópico.
• Se puede llevar a cabo de dos formas:
Método M-43
Transformación 3D de semejanza.
Fases del proceso de cálculo Método M-7
Obtención de las aproximadas de los parámetros de transformación.
Planteamiento del modelo matemático linealizado.
Formación de las ecuaciones.
Solución de las ecuaciones
normales :
zyx dTdTdTddd

Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea
Incógnitas:
•Se utilizan ecuaciones de transformación
tridimensional.
•Se tienen que determinar 7 parámetros por unión de
modelo y las coordenadas X,Y,Z terreno de los
puntos de Control Menor.
, , , Tx, Ty, Tz, , Xi, Yi, Zi
Ecuaciones :
Se utiliza la transformación tridimensional
linealizada. Cada punto de Control medido
proporciona 3 ecuaciones de observación (X,Y,Z).
• Método de aerotriangulación por Modelos Independientes.
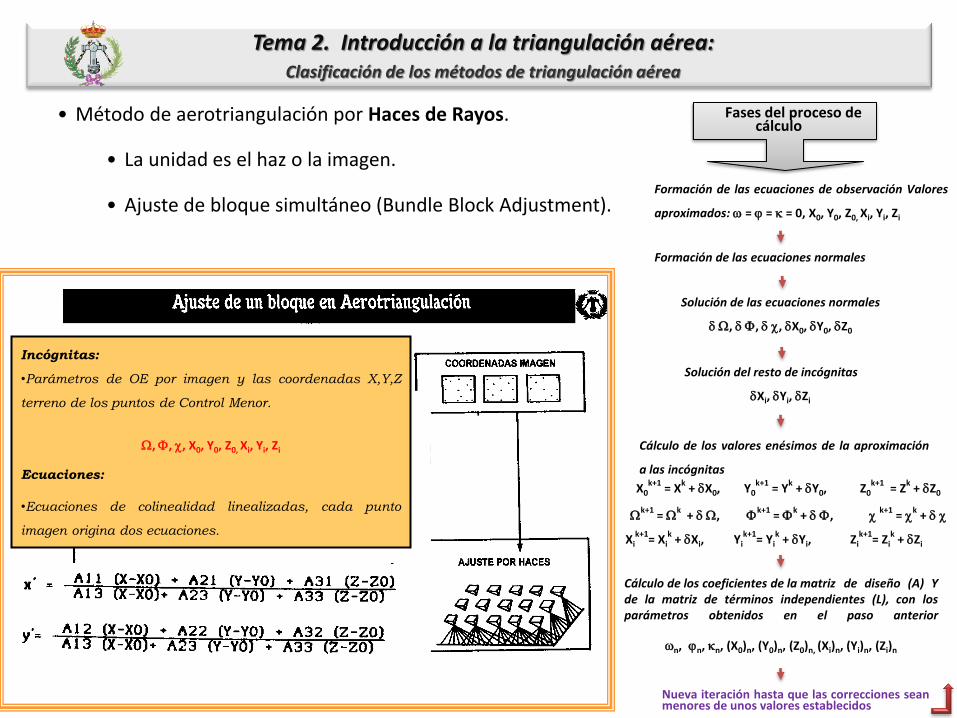
Incógnitas:
•Parámetros de OE por imagen y las coordenadas X,Y,Z
terreno de los puntos de Control Menor.
, , , X0, Y0, Z0, Xi, Yi, Zi
Ecuaciones:
•Ecuaciones de colinealidad linealizadas, cada punto
imagen origina dos ecuaciones.
Formación de las ecuaciones de observación Valores
aproximados: = = = 0, X0, Y0, Z0, Xi, Yi, Zi
Formación de las ecuaciones normales
Solución de las ecuaciones normales
, , , X0, Y0, Z0
Solución del resto de incógnitas
Xi, Yi, Zi
X0k+1
= Xk + X0, Y0
k+1 = Y
k + Y0, Z0
k+1 = Z
k + Z0
k+1
= k
+ , k+1
= k + ,
k+1 =
k +
Xik+1
= Xik + Xi, Yi
k+1= Yi
k + Yi, Zi
k+1= Zi
k + Zi
Cálculo de los coeficientes de la matriz de diseño (A) Y de la matriz de términos independientes (L), con los parámetros obtenidos en el paso anterior
n, n, n, (X0)n, (Y0)n, (Z0)n, (Xi)n, (Yi)n, (Zi)n
Nueva iteración hasta que las correcciones sean menores de unos valores establecidos
Fases del proceso de cálculo
Tema 2. Introducción a la triangulación aérea: Clasificación de los métodos de triangulación aérea
• Método de aerotriangulación por Haces de Rayos.
• La unidad es el haz o la imagen.
• Ajuste de bloque simultáneo (Bundle Block Adjustment).
Cálculo de los valores enésimos de la aproximación
a las incógnitas

Tema 2. Introducción a la triangulación aérea: Ventajas de la triangulación aérea
• Trabajo mas uniforme, se eliminan las dificultades meteorológicas
• Económica
• No se necesita acceder a sitios difíciles: escarpados, rocas,
prohibidos, etc.
• Control sobre los posibles puntos de apoyo de campo durante la AT
• Uso en Catastro para localizar linderos y esquinas de parcelas
• Determinación precisa de las posiciones relativas de las partes de una
gran maquinaria: embarcaciones, buques, aviones, etc.