Procesamiento Digital de...
16
Procesamiento Digital de Imágenes Unidad IV (2da. parte): Restauración de imágenes II Departamento de Informática - FICH Universidad Nacional del Litoral 29 de abril de 2011 Unidad V (b): Restauraci´ on de im´ agenes II – p. 1/16
-
Upload
hoangthien -
Category
Documents
-
view
215 -
download
0
Transcript of Procesamiento Digital de...

Procesamiento Digital de Imágenes
Unidad IV (2da. parte): Restauración de imágenes II
Departamento de Informática - FICHUniversidad Nacional del Litoral
29 de abril de 2011
Unidad V (b): Restauracion de imagenes II – p. 1/16

Temas a desarrollar
b Motivación.b Modelo de degradación.b Modelos de ruido.b Filtrado espacial.b Ruido periódico y filtrado frecuencial.b Estudio de H
b Estimación de Hb Filtrado inverso
b Filtrado de mínimos cuadradosb Filtro generalizado de Wiener
Unidad V (b): Restauracion de imagenes II – p. 2/16
Modelo de degradación
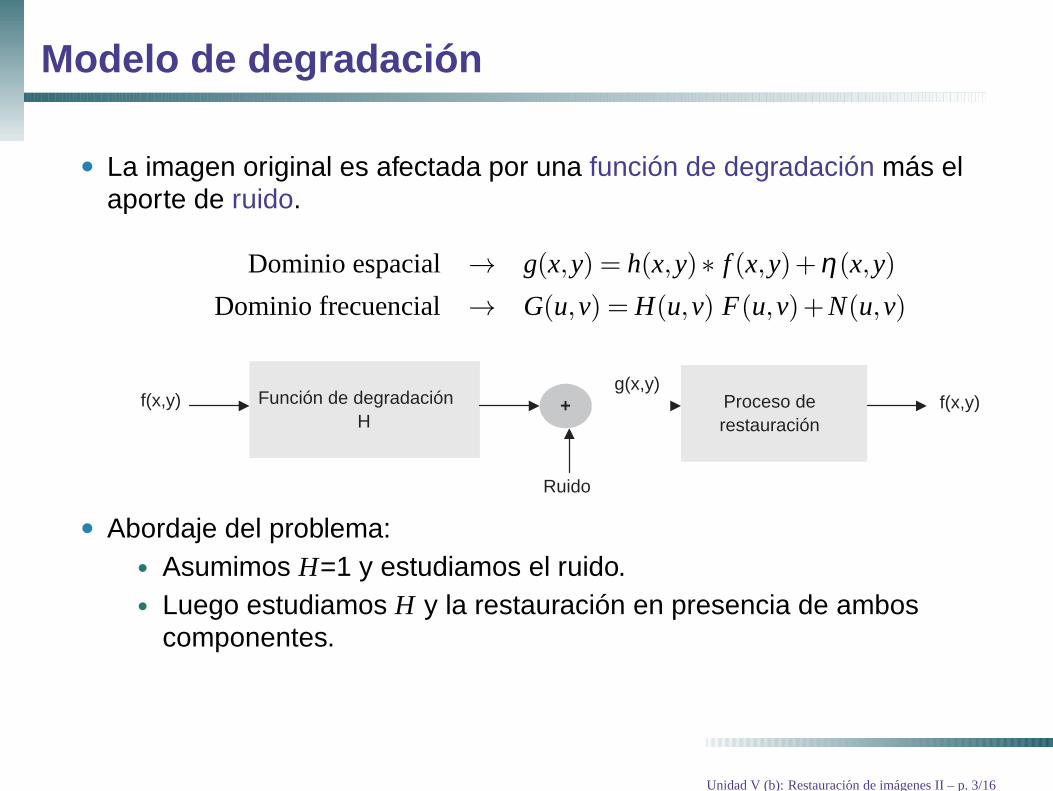
b La imagen original es afectada por una función de degradación más elaporte de ruido.
Dominio espacial → g(x,y) = h(x,y)∗ f (x,y)+η(x,y)
Dominio frecuencial → G(u,v) = H(u,v) F(u,v)+N(u,v)
Función de degradación H
+
Ruido
Proceso de restauración
f(x,y) f(x,y) g(x,y)
b Abordaje del problema:b Asumimos H=1 y estudiamos el ruido.b Luego estudiamos H y la restauración en presencia de ambos
componentes.
Unidad V (b): Restauracion de imagenes II – p. 3/16

Introducción
b Estudio anterior: efecto del ruido con degradación nula.b Ahora: efecto de la función de degradación con ruido nulo
g(x,y) = h(x,y)∗ f (x,y)
G(u,v) = H(u,v) F(u,v)
b Estudiaremos: degradaciones que pueden ser modeladas medianteprocesos lineales e invariantes a la posición.
b Los filtros utilizados reciben el nombre de filtros de deconvolución.b El proceso de restauración se denomina filtrado inverso.
b Abordaje del problema:b Estimación de la función de degradación: tres maneras.b Planteo de algoritmos de filtrado.
Unidad V (b): Restauracion de imagenes II – p. 4/16

Estimación de H
b Estimación por observación de la imagen:b Utilizado cuando se dispone solamente de imágenes adquiridas, no
del sistema de adquisición.b En áreas de alto contenido de señal podemos copiar grises y generar
una subimagen "limpia" fs(x,y) basada en las estructuras de laimagen.
b Inferencia de características de H mediante:
Hs(u,v) =Gs(u,v)
Fs(u,v)
b Generación de H(u,v) mediante escalado (la invariancia aldesplazamiento permite hacerlo).
Unidad V (b): Restauracion de imagenes II – p. 5/16

Estimación de H
b Estimación por experimentación:b Utilizado cuando se dispone del sistema de adquisición.b Obtención de la respuesta al impulso del sistema adquiriendo un
patrón puntual de luz.b Estimación de la función de degradación mediante:
H(u,v) =G(u,v)
A
Unidad V (b): Restauracion de imagenes II – p. 6/16

Estimación de H
b Estimación por modelización:b A menudo se emplea un modelo físico para obtener la respuesta al
impulso del sistema degradante. Ej: modelo de turbulenciaatmosférica (desenfoque aprox. gaussiano)
H(u,v) = e−k(u2+v2)5/6
Unidad V (b): Restauracion de imagenes II – p. 7/16

Estimación de H
b Estimación por modelización:b En caso de conocer el motivo de la degradación, se puede plantear y
ajustar un modelo matemático. Ej: desenfoque debido a movimientouniforme en la imagen
H(u,v) =T
π(ua+ vb)sin[π(ua+ vb)]e− jπ(ua+vb)
Unidad V (b): Restauracion de imagenes II – p. 8/16

Filtrado inverso
b En la ausencia de ruido, y conocida (o estimada) la función H, la maneramás simple de restaurar la imagen es:
F(u,v) =G(u,v)H(u,v)
= R(u,v) G(u,v)
donde el filtro inverso está dado por 1/H(u,v).b En la presencia de ruido, la ecuación del sistema queda:
F(u,v) = F(u,v)+N(u,v)H(u,v)
b Analizando la ecuación:b Aunque se conozca H, no se puede recuperar la imagen original.b En valores pequeños de H, el ruido se amplifica desmesuradamente.
b En la práctica pueden ser difíciles de construir ya que son inestables.
Unidad V (b): Restauracion de imagenes II – p. 9/16

Filtrado inverso
b Solución #1: utilizar filtros pseudo-inversos:
R(u,v) =
{
1H(u,v) , |H(u,v)|> ε0, resto
b Solución #2: suavizar la relación G/H con filtros pasa-bajos:
Unidad V (b): Restauracion de imagenes II – p. 10/16

Filtrado de mínimos cuadrados
b Aproximación que maneja la estadística del ruido y la función dedegradación conjuntamente.
b El método considera a la imagen y al ruido como procesos aleatorios, yaplica estadística (correlación) entre la imagen y el ruido.
b Filtro paramétrico de Wiener: función que minimiza la relación ruido/señal.La restauración en el dominio frecuencial queda dada por:
F(u,v) =
[
1H(u,v)
|H(u,v)|2
|H(u,v)|2+ γ Sη (u,v)S f (u,v)
]
G(u,v)
γ: parámetro del filtro.Sη (u,v) = |N(u,v)|2: espectro de potencia del ruido.
S f (u,v) = |F(u,v)|2: espectro de potencia de la imagen original.
Unidad V (b): Restauracion de imagenes II – p. 11/16

Filtrado de mínimos cuadrados
b Casos particulares:b γ = 0: filtro inverso.b γ = 1: filtro de Wiener.b γ 6= 0,1: filtro paramétrico de Wiener.
b La elección de γ = 1 conduce a una función que minimiza el errorcuadrático medio (óptimo estadísticamente):
e2 = E{( f − f )2}
b La implementación requiere conocer los espectros de potencia de laimagen y del ruido, o bien la relación señal/ruido ρ = S f (u,v)/Sη (u,v):
F(u,v) =
[
1H(u,v)
|H(u,v)|2
|H(u,v)|2+ γρ
]
G(u,v)
Notar que cuando η → 0, el filtro paramétrico tiende al filtro inverso.
Unidad V (b): Restauracion de imagenes II – p. 12/16
Filtrado de mínimos cuadrados
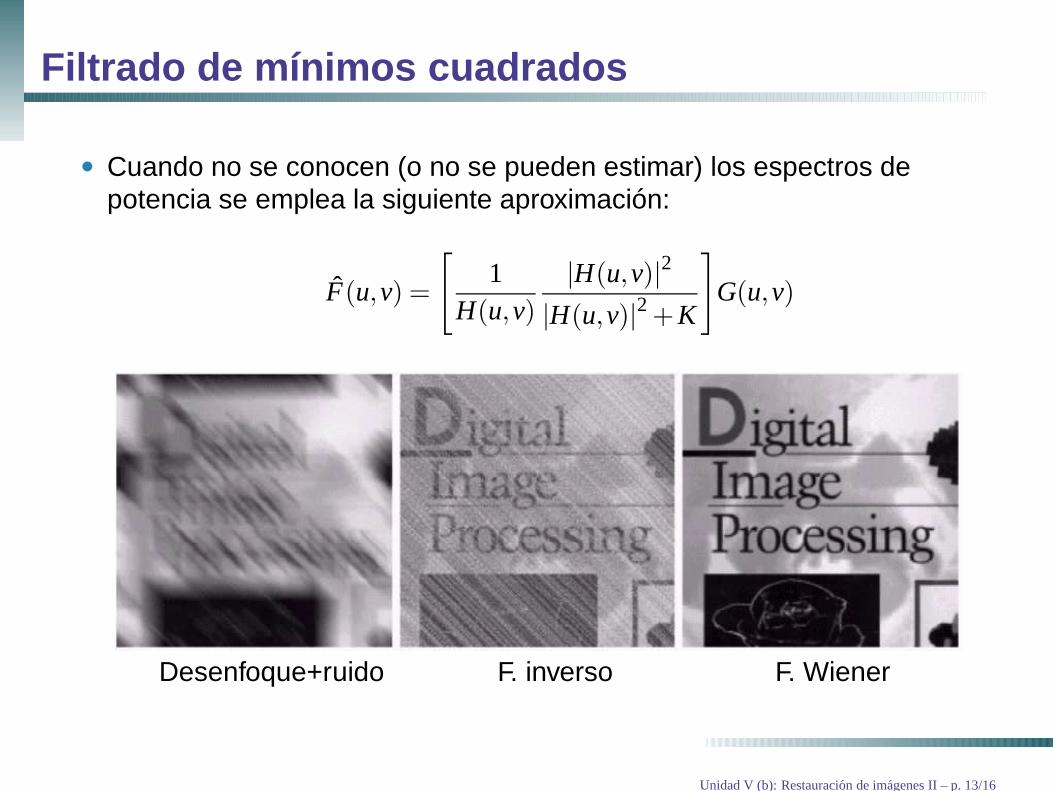
b Cuando no se conocen (o no se pueden estimar) los espectros depotencia se emplea la siguiente aproximación:
F(u,v) =
[
1H(u,v)
|H(u,v)|2
|H(u,v)|2+K
]
G(u,v)
Desenfoque+ruido F. inverso F. Wiener
Unidad V (b): Restauracion de imagenes II – p. 13/16

Filtrado de mínimos cuadrados
b Efecto del parámetro γ en el filtro paramétrico:
g(x,y) f (x,y),γ = 0.1 f (x,y),γ = 5
b Valores pequeños de γ: mejor remoción de la degradación H (ej:desenfoque), y pobre filtrado del ruido (ej: ruido gaussiano).
b Valores altos de γ: pobre restauración de la degradación H y mejorfiltrado del ruido.
Unidad V (b): Restauracion de imagenes II – p. 14/16

Filtro de la media geométrica
b Generalización del filtro de Wiener:
F(u,v) =
[
H∗(u,v)
|H(u,v)|2
]α[
H∗(u,v)
|H(u,v)|2+β Sη (u,v)S f (u,v)
]1−α
G(u,v)
con α, β ∈ ℜ ≥ 0b Familia de filtros según los parámetros:
b α = 1: filtro inverso.b α = 0: filtro paramétrico de Wiener. β = 1: filtro de Wiener.b α = 1/2: media geométrica entre el f. inverso y el f. de Wiener.b α = 1/2 y β = 1: filtro de ecualización del espectro de potencia.b Combinaciones.
Unidad V (b): Restauracion de imagenes II – p. 15/16

Fin de teoría
b Próxima teoría: Unidad V - Segmentación
Unidad V (b): Restauracion de imagenes II – p. 16/16