Procedimiento Comp Adelanto Bode
2
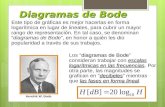
Por tanto, u m % 1 ∂a T (7-26) Como puede observarse en la Figura 7-92, el compensador de adelanto es básicamente un filtro paso alta. (Pasan las frecuencias altas, pero se atenúan las frecuencias bajas.) Técnicas de compensación de adelanto basadas en el método de la respuesta en frecuencia. La función principal del compensador de adelanto es modificar la curva de respuesta en frecuencia para proporcionar un ángulo de adelanto de fase suficiente para compen- sar el excesivo retardo de fase asociado con las componentes del sistema fijo. Sea el sistema que se muestra en la Figura 7-93. Supóngase que las especificaciones de com- portamiento se dan en función del margen de fase, del margen de ganancia, de las constantes de error estático de velocidad, etc. El procedimiento para diseñar un compensador de adelanto me- diante el método de respuesta en frecuencia se plantea del modo siguiente: 1. Suponga el siguiente compensador de adelanto: G c (s) % K c a Ts ! 1 aTs ! 1 % K c s ! 1 T s ! 1 aT (0 a a a 1) Defina K c a % K Entonces, G c (s) % K Ts ! 1 aTs ! 1 La función de transferencia en lazo abierto del sistema compensado es G c (s)G(s) % K Ts ! 1 aTs ! 1 G(s) % Ts ! 1 aTs ! 1 KG(s) % Ts ! 1 aTs ! 1 G 1 (s) Donde G 1 (s) % KG(s) Determine la ganancia K que satisfaga el requisito sobre la constante estática de error dada. 2. Usando la ganancia K así determinada, dibuje el diagrama de Bode de G 1 ( ju), el sistema con la ganancia ajustada pero sin compensar. Calcule el margen de fase. 3. Determine el ángulo de adelanto de fase que es necesario que se añada al sistema. Incre- mente un adelanto de fase adicional de 5 o a 12 o al ángulo de adelanto de fase requerido, Figura 7-93. Sistema de control. Capítulo 7. Análisis y diseño de sistemas de control por el método de la respuesta en frecuencia 495 www.FreeLibros.org
-
Upload
ivan-ignacio-montecino-bacigalupo -
Category
Documents
-
view
214 -
download
2
description
procedimiento para ekl desarrollo de ejercicios
Transcript of Procedimiento Comp Adelanto Bode
Por tanto,um%1aT(7-26)ComopuedeobservarseenlaFigura7-92, elcompensadordeadelantoesbsicamenteunfiltro paso alta. (Pasan las frecuencias altas, pero se atenan las frecuencias bajas.)Tcnicas de compensacin de adelanto basadas en el mtodo de la respuestaen frecuencia. Lafuncinprincipaldelcompensadordeadelantoesmodificarlacurvaderespuesta en frecuencia para proporcionar un ngulo de adelanto de fase suficiente para compen-sar el excesivo retardo de fase asociado con las componentes del sistema fijo.Sea el sistema que se muestra en la Figura 7-93. Supngase que las especificaciones de com-portamiento se dan en funcin del margen de fase, del margen de ganancia, de las constantes deerror esttico de velocidad, etc. El procedimiento para disear un compensador de adelanto me-diante el mtodo de respuesta en frecuencia se plantea del modo siguiente:1. Suponga el siguiente compensador de adelanto:Gc(s) %KcaTs !1aTs !1%Kcs !1Ts !1aT(0 aa a1)DefinaKca %KEntonces,Gc(s) %KTs !1aTs !1La funcin de transferencia en lazo abierto del sistema compensado esGc(s)G(s) %KTs !1aTs !1 G(s) %Ts !1aTs !1 KG(s) %Ts !1aTs !1 G1(s)DondeG1(s) %KG(s)Determinelaganancia Kquesatisfagaelrequisitosobrelaconstanteestticadeerrordada.2. Usando la ganancia K as determinada, dibuje el diagrama de Bode de G1( ju), el sistemacon la ganancia ajustada pero sin compensar. Calcule el margen de fase.3. Determine el ngulo de adelanto de fase que es necesario que se aada al sistema. Incre-mente un adelanto de fase adicional de 5oa 12oal ngulo de adelanto de fase requerido,Figura 7-93. Sistema de control.Captulo 7. Anlisis y diseo de sistemas de control por el mtodo de la respuesta en frecuencia 495www.FreeLibros.orgya que la adicin del compensador de adelanto desplaza la frecuencia de cruce de ganan-cia hacia la derecha y disminuye as el margen de fase.4. Determine el factor de atenuacin a a partir de la Ecuacin (7-25). Determine la frecuen-cia donde la magnituddel sistemano compensado G1( ju) es igual a .20 log (1/a).Seleccione esta frecuencia como la nueva frecuencia de cruce de ganancia. Esta frecuen-cia corresponde um%1/(aT) y el cambio de fase mximo hm ocurre en esta frecuencia.5. Determine las frecuencias esquinas del compensador de adelanto del modo siguiente:Compensador de adelanto de cero: u%1TCompensador de adelanto del polo:u%1aT6. Usando el valor de K determinado en el paso 1 y el de a determinado en el paso 4, calcu-le la constante Kc a partir deKc%Ka7. Verifiqueelmargendegananciaparaasegurarsedequeessatisfactorio. Sinoesas,repita el proceso de diseo modificando la localizacin de polos-ceros del compensadorhasta que se obtenga un resultado satisfactorio.EJEMPLO 7-26 Sea el sistema que se muestra en la Figura 7-94. La funcin de transferencia en lazo abierto esG(s) %4s(s !2)Se quiere disear un compensador para e1 sistema de modo que la constante de error esttico develocidad Kv sea de 20 seg.1, el margen de fase sea al menos de 50oy el margen de ganancia seaal menos de 10 dB.Se utilizar un compensador de adelanto de la formaGc(s) %KcaTs !1aTs !1%Kcs !1Ts !1aTEl sistema compensado tendr la funcin de transferencia en lazo abierto Gc(s)G(s).DefinaG1(s) %KG(s) %4Ks(s !2)donde K%Kca.Figura 7-94. Sistema de control.496 Ingeniera de control modernawww.FreeLibros.org