Presentación de PowerPoint - Tablero al Parque -...
32
RESPUESTA EN EL TIEMPO CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
Transcript of Presentación de PowerPoint - Tablero al Parque -...

RESPUESTA EN EL
TIEMPO
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

BUENO, YA TENGO UN MODELO MATEMÁTICO. ¿Y AHORA QUÉ?
Vamos a analizar el comportamiento del sistema.
Entonces analizamos las respuestas aseñales de prueba particulares.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
PLANTAENTRADA
NO SE COMO VA A SER. NO LO PUEDO PREDECIR.NO LA PUEDO DESCRIBIR DE FORMA ANÍTICA.
SALIDA

BUENO, YA TENGO UN MODELO MATEMÁTICO. ¿Y AHORA QUÉ?
El controlador que diseñemos debe encargarse de tomarese comportamiento y transformarlo en el quedeseamos.
PLANTAENTRADA CONTROLADOR SALIDA
SENSORSET POINT
ELEMENTO FINAL DE CONTROL
Para ver el funcionamiento del sistema completonecesito la función de transferencia de lazo cerrado
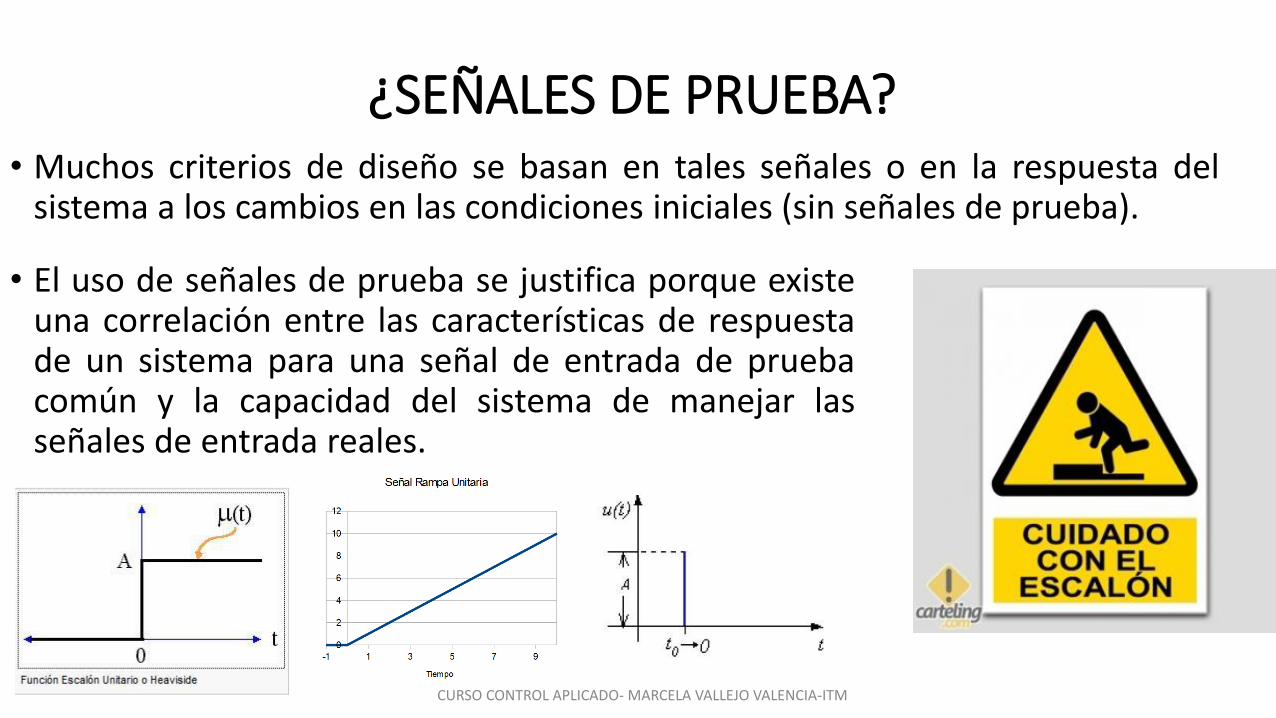
¿SEÑALES DE PRUEBA?• Muchos criterios de diseño se basan en tales señales o en la respuesta del
sistema a los cambios en las condiciones iniciales (sin señales de prueba).
• El uso de señales de prueba se justifica porque existeuna correlación entre las características de respuestade un sistema para una señal de entrada de pruebacomún y la capacidad del sistema de manejar lasseñales de entrada reales.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

¿Y CUÁL USO?
La forma de la entrada a laque el sistema estará sujetocon mayor frecuencia enuna operación normaldetermina cuál de lasseñales de entrada típicas sedebe usar
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

Y AL APLICAR ESTAS SEÑALES DE PRUEBA ¿QUE TENGO QUE OBSERVAR?
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
RESPUESTA TRANSITORIA•VELOCIDAD DEL SISTEMA ALRESPONDER•SOBREELONGACIONES YOSCILACIONES
RESPUESTA EN ESTADOESTABLE•ERROR EN ESTADO ESTABLE•SI HAY ESTABILIDAD

Respuesta transitoria y respuesta en estado estacionario
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
TRANSITIORIA ESTADO ESTABLE
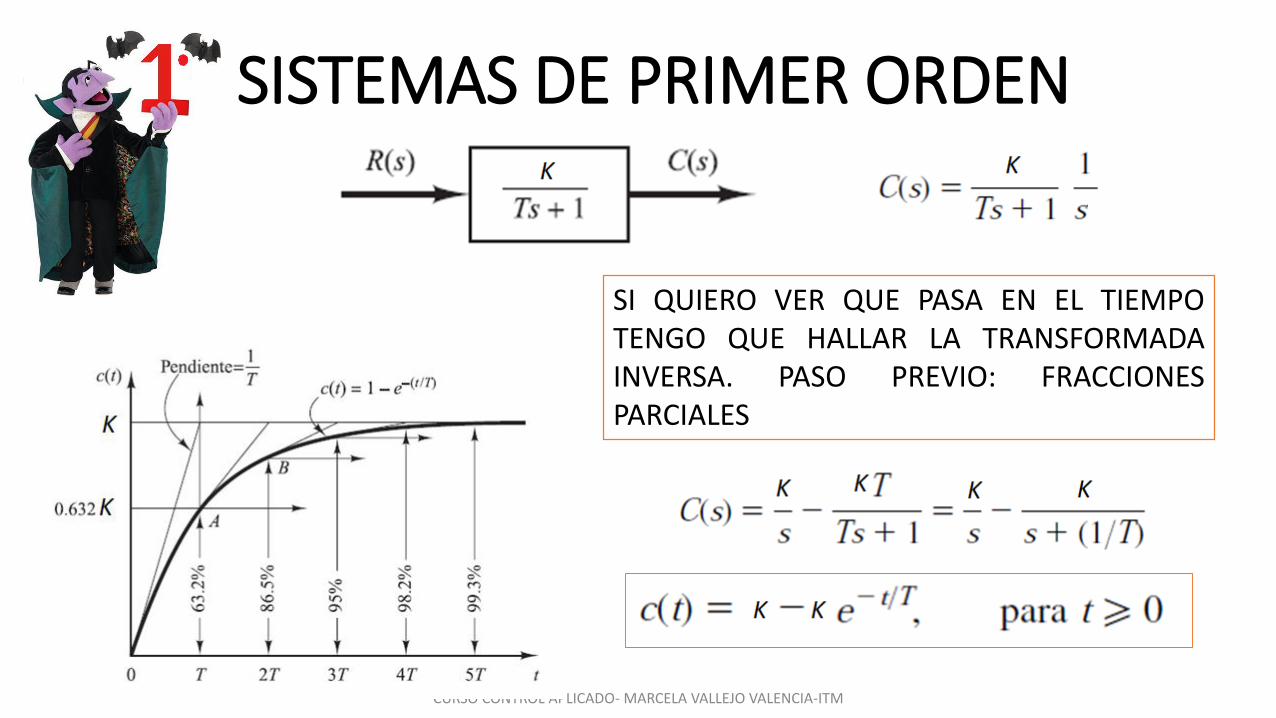
SISTEMAS DE PRIMER ORDEN
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
SI QUIERO VER QUE PASA EN EL TIEMPOTENGO QUE HALLAR LA TRANSFORMADAINVERSA. PASO PREVIO: FRACCIONESPARCIALES

RESPUESTA DE SISTEMAS DE PRIMER ORDEN
Cuanto más pequeña es la constante de tiempo T, menor es
el error en estado estacionario después de la entrada rampa
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
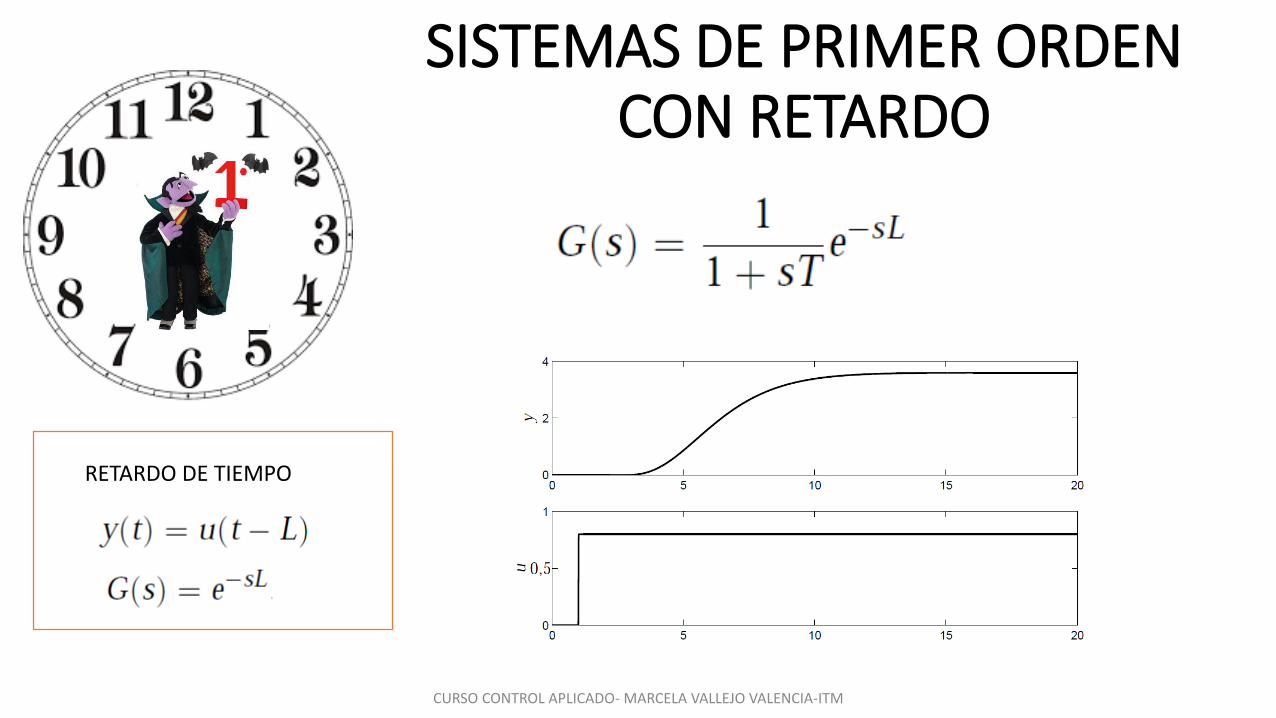
SISTEMAS DE PRIMER ORDENCON RETARDO
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
RETARDO DE TIEMPO

APROXIMACIÓN DE PADE
Primer Orden
Segundo Orden
Tercer Orden
Retardo de 3 segundos y aproximaciones

SISTEMAS DE SEGUNDO ORDEN
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
22
2
2)(
)()(
nn
n
i sssV
sVsG
12
4 22
nna
acbbpolos
ωn= Frecuencia natural del sistema• ζ=Coeficiente (o factor) de amortiguamiento• Kp =ganancia del proceso,

VEAMOS LAS POSIBILIDADES
• Si 0< ζ <1, los polos son complejos conjugados. El sistema, entonces, sedenomina subamortiguado y la respuesta transitoria es oscilatoria.
• Si ζ =1, Los polos son reales. E iguales El sistema se denominacríticamente amortiguado.
• Si ζ >1 los polos son reales y diferentes. El sistema es sobreamortiguado yno presenta oscilaciones.
• Si ζ =0 la respuesta se vuelve oscilatoria.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
12 nnpolos

VEAMOS GRÁFICAMENTE
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

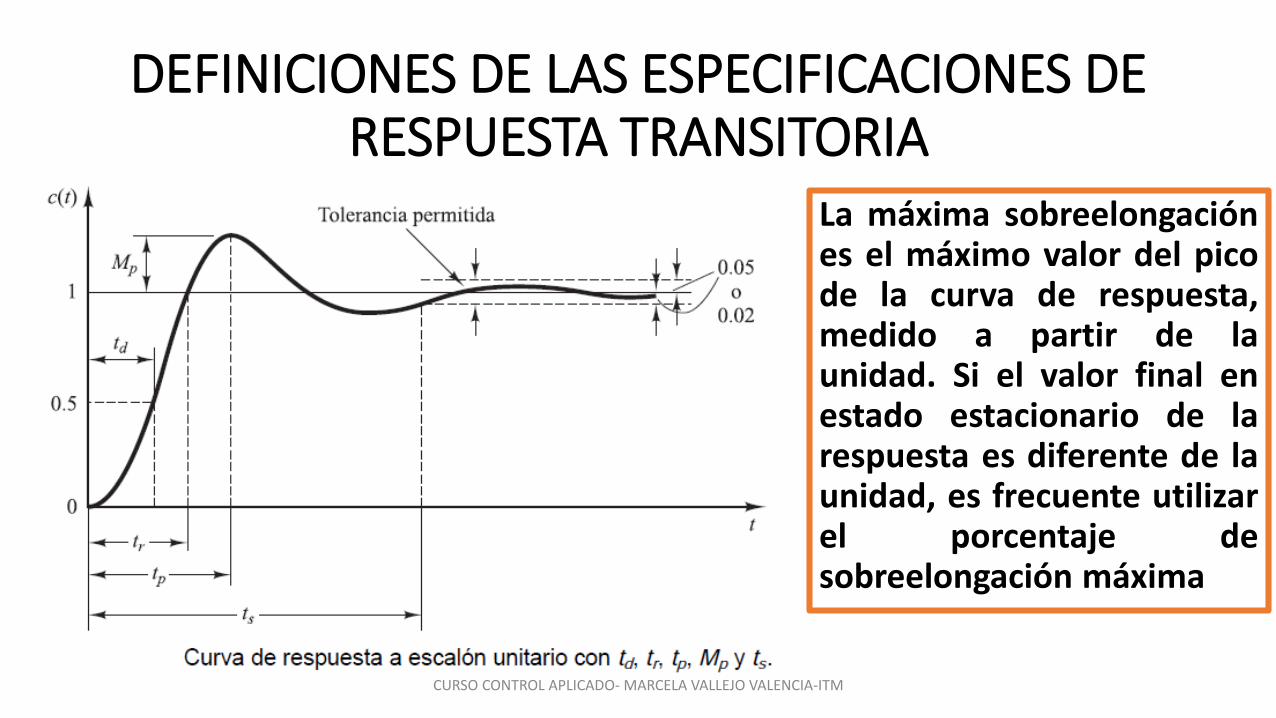
DEFINICIONES DE LAS ESPECIFICACIONES DE RESPUESTA TRANSITORIA
• La respuesta transitoria de un sistema para una entradaescalón unitario depende de las condiciones iniciales.
•Por conveniencia al comparar respuestas transitorias devarios sistemas, es una práctica común usar la condicióninicial estándar de que el sistema está en reposo alinicio. De este modo, las características de respuesta secomparan con facilidad.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

DEFINICIONES DE LAS ESPECIFICACIONES DE RESPUESTA TRANSITORIA
• Tiempo de retardo, td
• Tiempo de subida, tr
• Tiempo pico, tp
• Sobreelongación, Mp
• Tiempo de asentamiento, ts
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

DEFINICIONES DE LAS ESPECIFICACIONES DE RESPUESTA TRANSITORIA
El tiempo de retardo esel tiempo requeridopara que la respuestaalcance la primera vez lamitad del valor final.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

DEFINICIONES DE LAS ESPECIFICACIONES DE RESPUESTA TRANSITORIA
El tiempo de subida es el tiemporequerido para que la respuestapase del 10 al 90%, del 5 al 95% odel 0 al 100% de su valor final.
• Para sistemas subamortiguadosde segundo orden, por logeneral se usa el tiempo desubida de 0 a 100%.
• Para sistemassobreamortiguados, sueleusarse el tiempo delevantamiento de 10 a 90%.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

DEFINICIONES DE LAS ESPECIFICACIONES DE RESPUESTA TRANSITORIA
El tiempo pico es eltiempo requerido paraque la respuesta alcanceel primer pico desobreelongación.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
DEFINICIONES DE LAS ESPECIFICACIONES DE RESPUESTA TRANSITORIA
La máxima sobreelongaciónes el máximo valor del picode la curva de respuesta,medido a partir de launidad. Si el valor final enestado estacionario de larespuesta es diferente de launidad, es frecuente utilizarel porcentaje desobreelongación máxima
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM

DEFINICIONES DE LAS ESPECIFICACIONES DE RESPUESTA TRANSITORIA El tiempo de asentamiento es
el tiempo que se requierepara que la curva derespuesta alcance un rangoalrededor del valor final deltamaño especificado por elporcentaje absoluto del valorfinal (por lo general, de 2 o5%). El tiempo deasentamiento se relacionacon la mayor constante detiempo del sistema decontrol. Los objetivos deldiseño del sistema encuestión determinan quécriterio de error enporcentaje utilizar.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
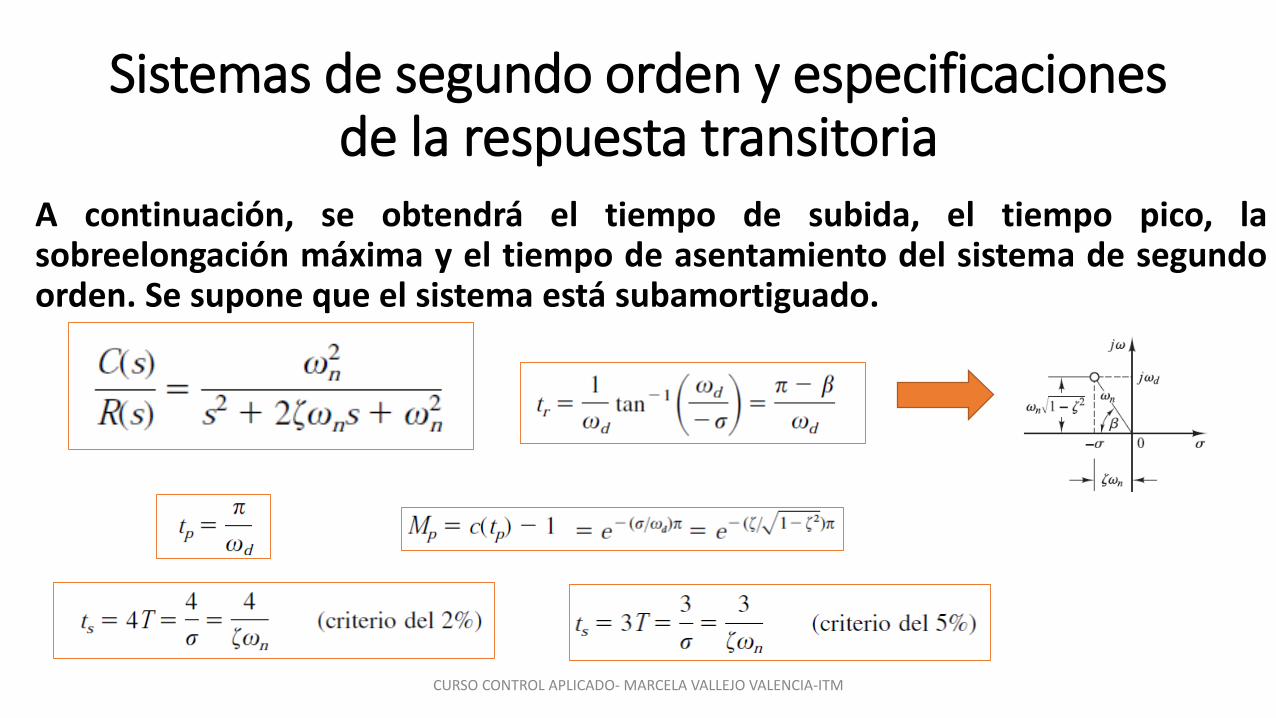
Sistemas de segundo orden y especificaciones de la respuesta transitoria
A continuación, se obtendrá el tiempo de subida, el tiempo pico, lasobreelongación máxima y el tiempo de asentamiento del sistema de segundoorden. Se supone que el sistema está subamortiguado.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
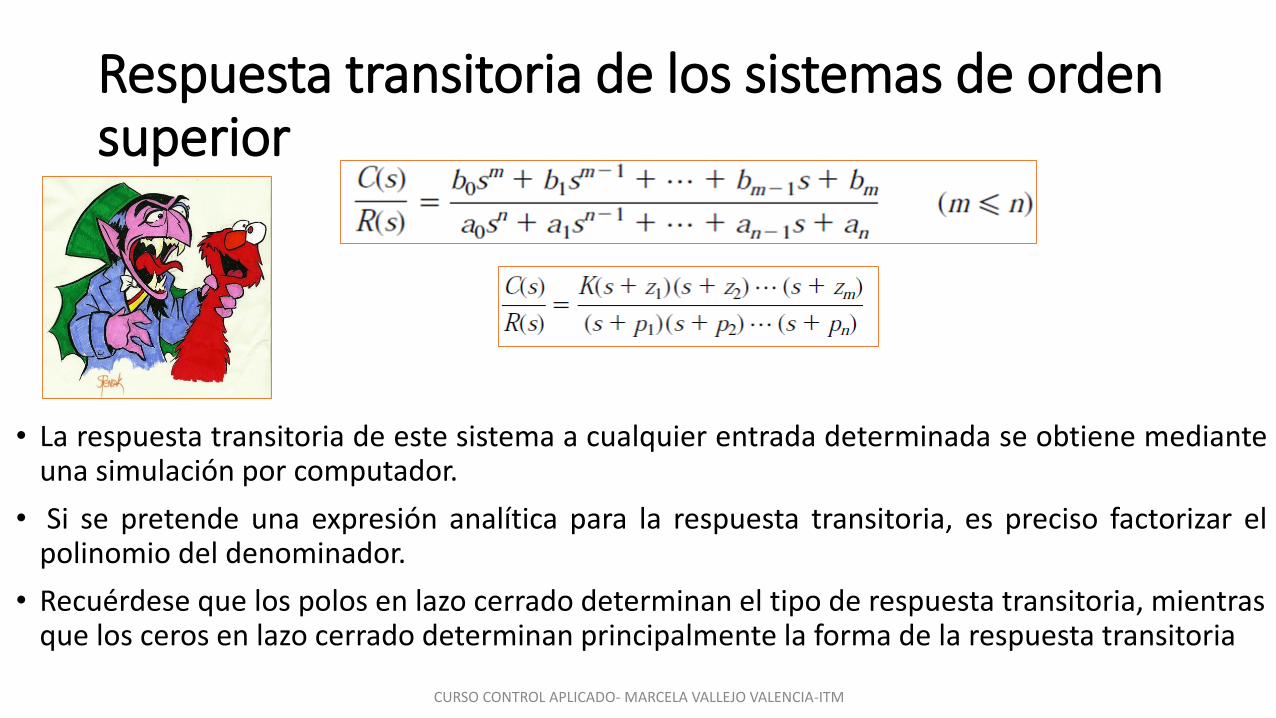
Respuesta transitoria de los sistemas de orden superior
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
• La respuesta transitoria de este sistema a cualquier entrada determinada se obtiene medianteuna simulación por computador.
• Si se pretende una expresión analítica para la respuesta transitoria, es preciso factorizar elpolinomio del denominador.
• Recuérdese que los polos en lazo cerrado determinan el tipo de respuesta transitoria, mientras que los ceros en lazo cerrado determinan principalmente la forma de la respuesta transitoria

Caso en el que todos los polos en lazo cerrado son reales y distintos (Respuesta al escalón)
aies el residuo del polo en s=pi
Un par polo-cero cercanos entre sí se cancelarán efectivamente uno al otro.
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
Todos los polos en el semiplano izquierdolas magnitudes relativas de los residuos determinan la importancia relativa
Si hay un cero cerca de un poloEl residuo en este polo es pequeño y el coeficiente del término de respuesta transitoria se vuelve pequeño
Si un polo está lejos del origenEl residuo puede ser pequeño. Los valores transitorios duran poco tiempo
Los términos con residuos pequeñosPueden pasarse por alto y así aproximar el sistema a uno de orden inferior.

Caso en el que los polos de C(s) están formados por polos reales y pares de polos complejos conjugados
Todos los polos en el semiplano izquierdo
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
términos exponenciales y los términos sinusoidalesamortiguados se aproximarán a cero conforme el tiempot aumente. Por tanto, la salida en estado estacionario esc(∞)=a.
La respuesta es la suma de un número de curvas exponenciales y curvas sinusoidales amortiguadas
Caso en el que los polos de C(s) están formados por polos reales y pares de polos complejos conjugados
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
Si el sistema es estable Polos que están lejos del eje jω tienen partes reales grandes y negativas.
Los términos exponenciales que corresponden a estos polos llegan a cero con mucha rapidez
la distancia horizontal del polo al eje jω determina el tiempo de asentamiento de los transitorios producidos por tal polo. Cuanto más pequeña es la distancia, más prolongado es el tiempo de asentamiento
POLOS DOMINANTES
• Los polos en lazo cerrado que tienen efectos dominantessobre el comportamiento de la respuesta transitoria sedenominan polos dominantes en lazo cerrado.
• Con mucha frecuencia, estos aparecen en forma de un parcomplejo conjugado. Los polos dominantes en lazo cerradoson los más importantes entre todos los polos en lazocerrado.

Polos dominantes en lazo cerrado
La dominancia relativa de los polos Cociente de las partes reales de los polos Magnitudes relativas de los residuos evaluados en los polos en lazo cerrado
Las magnitudes de los residuos dependen tanto de los polos como de los ceros
Los polos más cercanos al eje jω dominarán elcomportamiento de la respuesta transitoria, debido aque corresponden a los términos de la respuestatransitoria que se disminuyen lentamente.
Si los cocientes de las partes reales son superiores a 5 y no hay ceros cerca

EJERCICIO
Para el siguiente sistema de segundo suponga ωn=1.
Use matlab para graficar la respuesta al escalón y los respectivos diagramas de polos y ceros para valores de ζ desde 0 hasta 1,4 en pasos de 0,2.
¿Qué conclusiones puede sacar de estos gráficos con respecto a la relación entre ζ, la posición de los polos y ceros y el comportamiento del sistema?
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
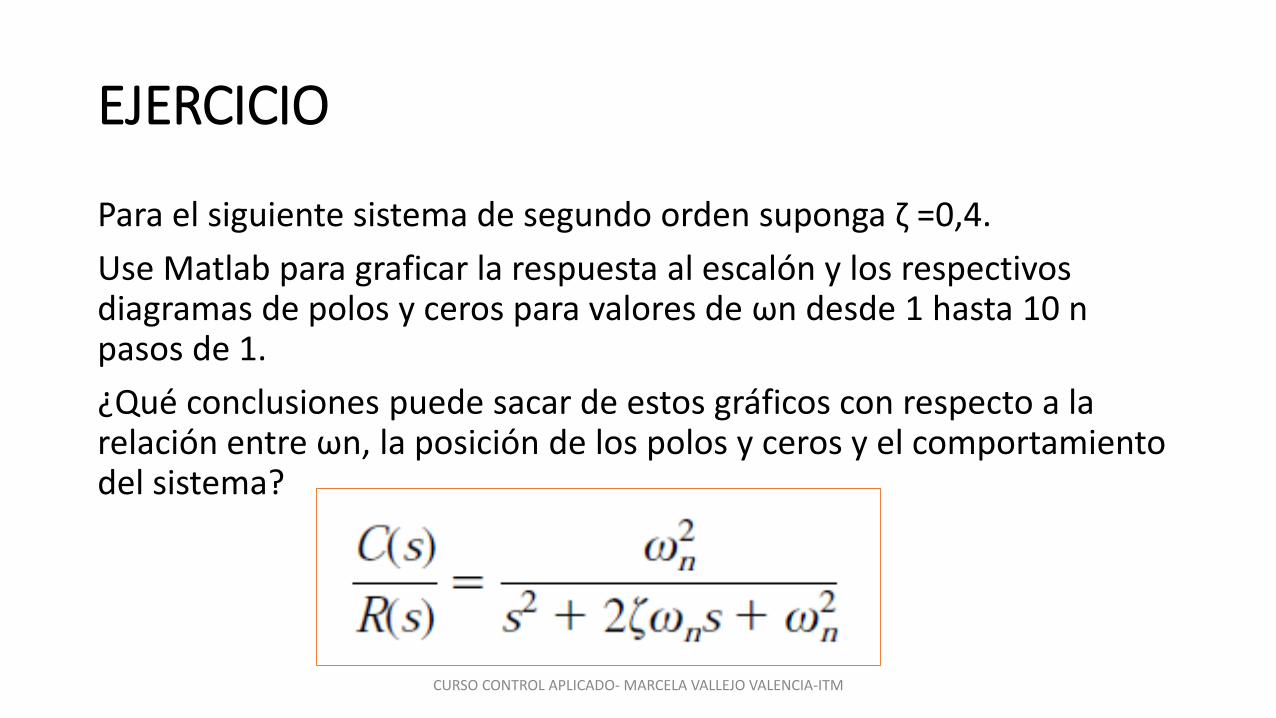
EJERCICIO
Para el siguiente sistema de segundo orden suponga ζ =0,4.
Use Matlab para graficar la respuesta al escalón y los respectivos diagramas de polos y ceros para valores de ωn desde 1 hasta 10 n pasos de 1.
¿Qué conclusiones puede sacar de estos gráficos con respecto a la relación entre ωn, la posición de los polos y ceros y el comportamiento del sistema?
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
Análisis de estabilidad en el plano complejo
• Obsérvese que el solo hecho de que todos los polos en lazo cerradose encuentren en el semiplano izquierdo del plano s no garantizacaracterísticas satisfactorias de respuesta transitoria.
• Si los polos dominantes complejos conjugados en lazo cerrado seencuentran cerca del eje jω, la respuesta transitoria presentaráoscilaciones excesivas o será muy lenta.
• Por esta razón, a fin de garantizar características de respuestatransitoria rápidas y bien amortiguadas, es necesario que los polos enlazo cerrado del sistema se encuentren en una región determinadadel plano complejo
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM
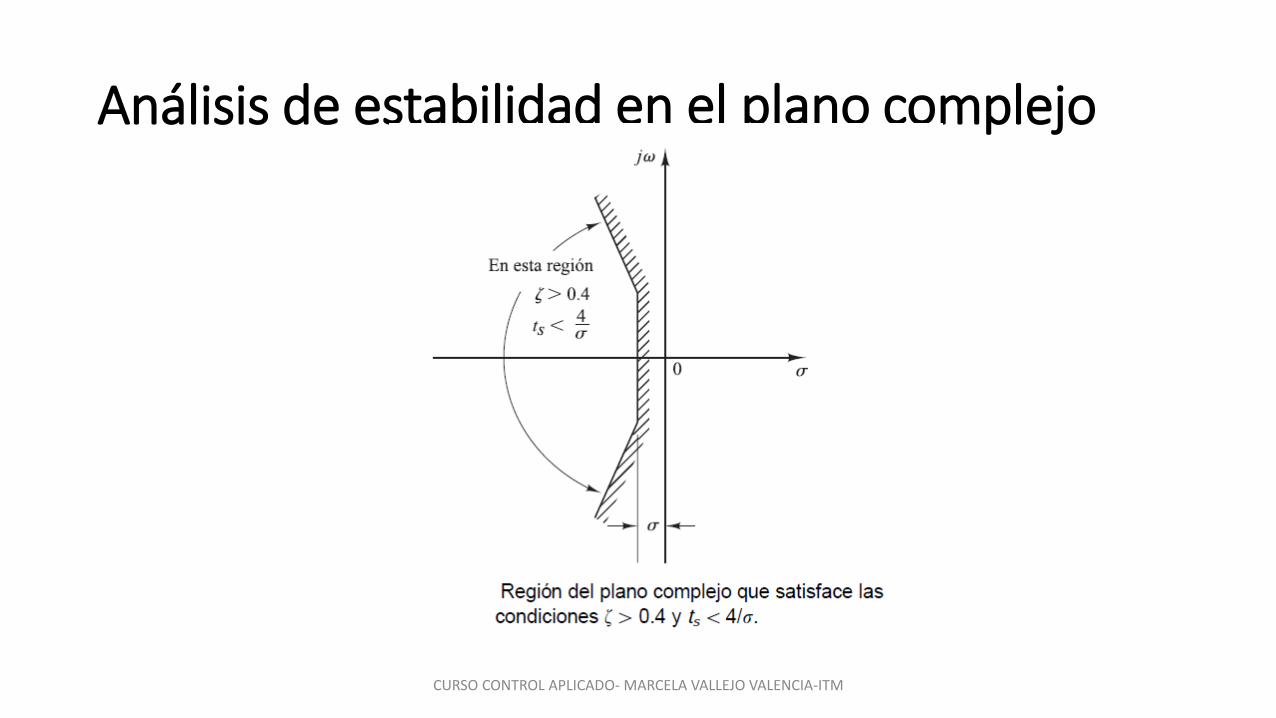
Análisis de estabilidad en el plano complejo
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM