Preguntas CONTROL.docx
20
PREGUNTAS DE CONTROL CON SOLUCIÓN 1. En cuando el sistema de la Figura 1(a) está sujeto a una entrada escalón unitario, la salida del sistema responde como se aprecia en la Figura 1(b). Determine los valores de K y T a partir de la curva de respuesta. (a) (b) Figura 1. SOLUCIÓN: La sobre-elongación máxima de 25.4% corresponde =0.4. A partir de la curva de respuesta, se tiene que t p =3. En consecuencia
-
Upload
jaime-andres-prieto-torres -
Category
Documents
-
view
169 -
download
0
Transcript of Preguntas CONTROL.docx

PREGUNTAS DE CONTROL CON SOLUCIÓN
1. En cuando el sistema de la Figura 1(a) está sujeto a una entrada escalón unitario, la salida del sistema responde como se aprecia en la Figura 1(b). Determine los valores de K y T a partir de la curva de respuesta.
(a) (b)
Figura 1.
SOLUCIÓN: La sobre-elongación máxima de 25.4% corresponde =0.4. A partir de la curva de respuesta, se tiene que tp=3.
En consecuencia

2. Considere el sistema en lazo cerrado dado por:
G (s )=ωn
2
s2+2 ζ ωn s+ωn2
Determine los valores de ζ y ωn para que el sistema responda a una entrada escalón con una sobre-elongación de aproximadamente el 5% y con un tiempo de asentamiento de 2 seg. (Utilice el criterio del 2%.)
SOLUCIÓN: La sobre-elongación de aproximadamente 5% corresponde a =0.69. Entonces:
3. Se sabe que un sistema oscilatorio tiene la siguiente función de transferencia:
G (s )=ωn
2
s2+2 ζ ωn s+ωn2
Suponga que existe un registro de una oscilación amortiguada, tal como aparece en la Figura 2. Determine el factor de amortiguamiento relativo ζ del sistema a partir de la gráfica.

Figura 2.SOLUCIÓN:
Decremento logarítmico
Define
Entonces
Que despejando es
Asi finalmente

4. Obtenga la respuesta impulso unitario y la respuesta escalón unitario de un sistema realimentado unitariamente cuya función de transferencia en lazo abierto sea
SOLUCIÓN: Para una entrada impulso unitario
Para una entrada escalón unitario
5. Considere el sistema de la Figura 3. Inicialmente el sistema está en reposo. Suponga que el carro se pone en movimiento mediante una fuerza de impulso unitario. ¿Puede detenerse mediante otra fuerza de impulso equivalente?
Figura 3.
SOLUCIÓN: Cuando la masa m es puesta en movimiento por una fuerza impulso unitaria, la ecuación del sistema es:

Se define otra fuerza impulso para detener el movimiento como A= , donde A es la magnitud indeterminada de la fuerza impulso, y t=T es el instante indeterminado en el que este impulso está siendo impreso en el sistema. Entonces la ecuación para el sistema cuando las dos fuerzas impulso son impresas es:
La transformada de laplace para esta ultima ecuación es:
Resolviendo X(s):
La transformada inversa de laplace de X(s) es
Si el movimiento de la masa es detenido en el tiempo t=T, entonces X(t) debe ser igual a cero para t≥T.Note que x(t) puede ser igual a cero para t≥T si elegimos:
Así el movimiento de la masa puede ser detenido por otra fuerza impulso, tal como
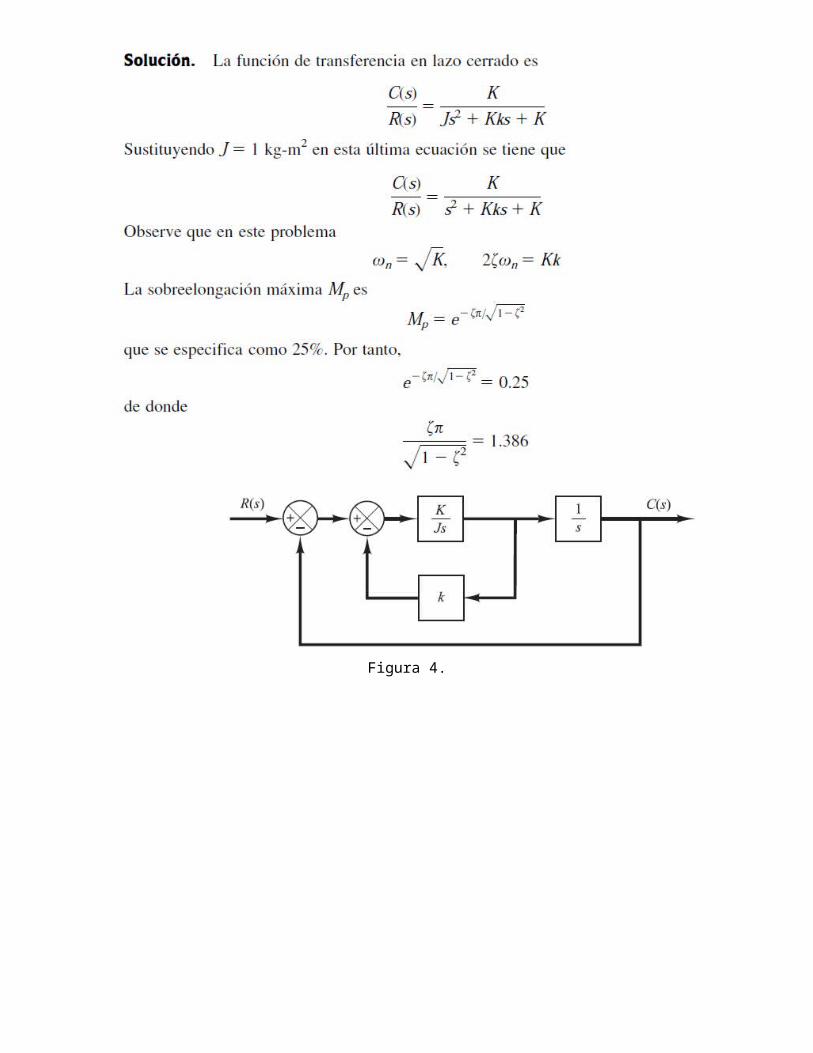
6. Determine los valores de K y k del sistema en lazo cerrado de la Figura 4 para que la sobre-elongación máxima de la respuesta escalón unitario sea del 25% y el tiempo pico sea de 2 seg.Suponga que J%1 kg-m2.

Figura 4.

7. La Figura 5(a) muestra un sistema vibratorio mecánico. Cuando se aplica al sistema una fuerza de 2 lb (entrada escalón), la masa oscila como se aprecia en la Figura 5(b). Determine m, b y k del sistema a partir de esta curva de respuesta. El desplazamiento x se mide a partir de la posición de equilibrio.
Figura 5. (a) Sistema vibratorio mecánico. (b) Curva de respuesta a un escalón.

8.

9. Dibuje los lugares de las raíces para el sistema de la Figura 6(a). (Se supone que la ganancia K es positiva.) Observe que para valores pequeños o grandes de K el sistema es sobreamortiguado y para valores medios de K es subamortiguado.
Figura 6. (a) Sistema de control, (b) Grafica del lugar de las raíces.


10. Dibuje los lugares de las raíces para el sistema de la Figura 7(a).
Figura 7. (a) Sistema de control, (b) Grafica del lugar de las raíces.

Observe que esta ecuación se satisface sólo si . Debido a la presencia de un
polo doble en el origen, el lugar de las raíces es tangente al eje . Las ramas del
lugar de las raíces no cruzan el eje . La Figura 7(b) es un dibujo del lugar de las raíces para este sistema.
11. Simplifique el diagrama de bloques de la siguiente figura.
Solución. Primero, se mueve el punto de ramificación de la trayectoria que contiene H1 fuera del lazo que contiene H2, como se aprecia en la Figura 8(a). Después la eliminación de dos lazos da lugar a la Figura 8(b). Al combinar dos bloques en uno se obtiene la Figura 8(c).

Figura 8.
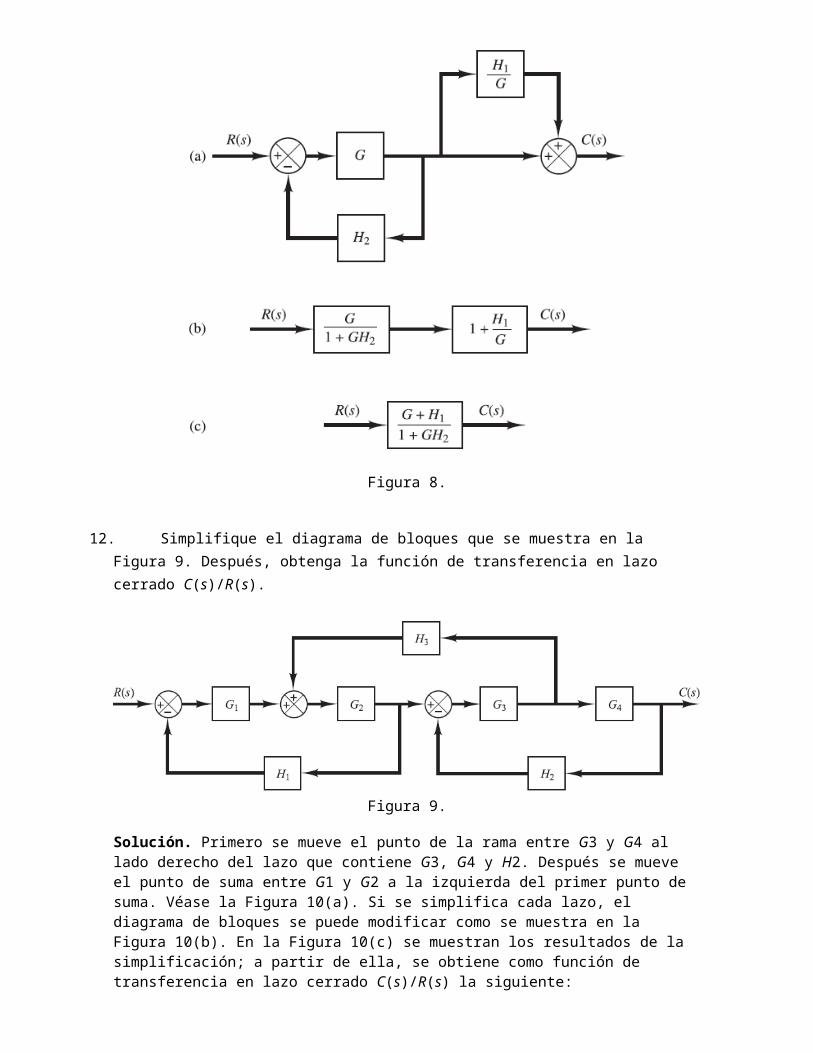
12. Simplifique el diagrama de bloques que se muestra en la Figura 9. Después, obtenga la función de transferencia en lazo cerrado C(s)/R(s).
Figura 9.
Solución. Primero se mueve el punto de la rama entre G3 y G4 al lado derecho del lazo que contiene G3, G4 y H2. Después se mueve el punto de suma entre G1 y G2 a la izquierda del primer punto de suma. Véase la Figura 10(a). Si se simplifica cada lazo, el diagrama de bloques se puede modificar como se muestra en la Figura 10(b). En la Figura 10(c) se muestran los resultados de la simplificación; a partir de ella, se obtiene como función de transferencia en lazo cerrado C(s)/R(s) la siguiente:

Figura 10.
13. La Figura 11(a) muestra un diagrama esquemático de un sistema de suspensión de un automóvil. Conforme el automóvil avanza por un camino, los desplazamientos verticales de las llantas funcionan como una excitación de movimiento para el sistema de suspensión del automóvil. El movimiento de este sistema consiste en un desplazamiento del centro de la masa y un giro alrededor del centro de la masa. El modelado matemático del sistema completo es bastante complicado. Una versión muy simplificada del sistema de suspensión aparece en la Figura 11(b). Suponiendo que el movimiento xi en el punto P es la entrada al sistema y el movimiento vertical xo del cuerpo es la salida, obtenga la función de transferencia Xo(s)/Xi (s). (Considere el movimiento del cuerpo sólo en la dirección vertical.) El desplazamiento xo se mide a partir de la posición de equilibrio en ausencia de la entrada xi.
Solución. La ecuación de movimiento para el sistema de la Figura 11(b) es
Si se toma la transformada de Laplace de esta última ecuación, y se suponen condiciones iniciales de cero, se obtiene
Por tanto, la función de transferencia Xo(s)/Xi(s) se obtiene mediante
Figura 11.
14. Obtenga la función de transferencia Y(s)/U(s) del sistema de la Figura12. La entrada u es un desplazamiento. (Al igual que el sistema del problema 13, esta es una versión simplificada de un sistema de suspensión de un automóvil o una motocicleta.)
Solución. Suponga que los desplazamientos x e y se miden respectivamente a partir de las posiciones en estado estacionario en ausencia de entrada u. Aplicando la segunda ley de Newton al sistema, se obtiene
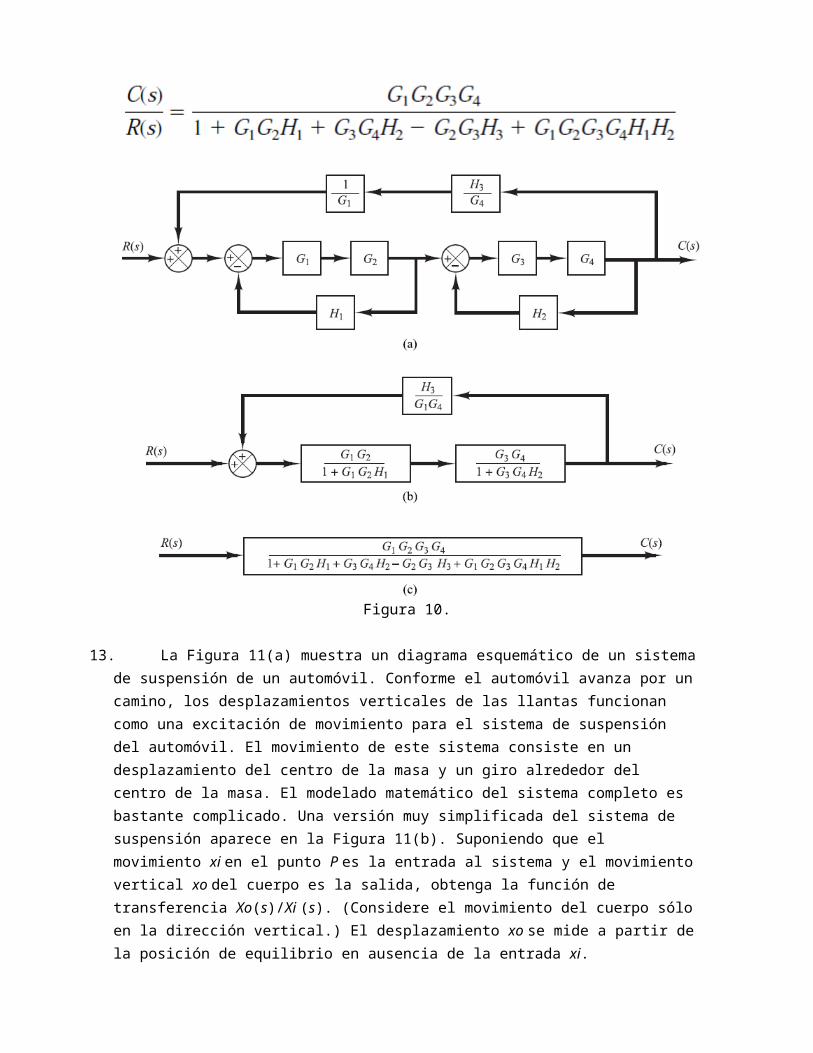
Figura 12.
15. Obtenga la representación en el espacio de estados del sistema mostrado en la Figura 13.

Figura 13.