PRÁCTICAS VÍA INTERNET Maqueta industrial de 4...
11
Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización) Universidad de León http://lra.unileon.es 1.0 10 PRÁCTICAS VÍA INTERNET Maqueta industrial de 4 tanques Manejo de la Interfaz
Transcript of PRÁCTICAS VÍA INTERNET Maqueta industrial de 4...

Realizado: Laboratorio Remoto de Automática (LRA-ULE)
Versión: Páginas:
Grupo SUPPRESS
(Supervisión, Control y Automatización)
Universidad de León
http://lra.unileon.es
1.0 10
PRÁCTICAS VÍA INTERNET
Maqueta industrial de 4 tanques
Manejo de la Interfaz

Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 1 -
0. INTRODUCCIÓN
En este documento se describe el entorno desarrollado con EJS para la Maqueta Industrial de 4
tanques. La aplicación tiene tres partes bien diferenciadas (Figura 1). En la parte de la izquierda
(que se denominará a partir de ahora ventana de representación) se puede observar el sinóptico de la
maqueta. En la parte de la derecha (que se denominará ventana de evolución) se muestran las
gráficas de evolución de las principales variables de la maqueta, así como la información de tipo
numérico. En la parte superior (que se denominará a partir de ahora barra de menús) aparecen
botones para diferentes controles sobre la simulación.
Fig. 1 Aplicación EJS de la Maqueta Industrial de 4 tanques

Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 2 -
1. VENTANA DE REPRESENTACIÓN DEL SISTEMA
En la parte superior de esta ventana se puede observar un esquema de la Maqueta Industrial de 4
Tanques. Algunos de los elementos que forman este esquema son dinámicos y muestran la
variación de la variable a la que hacen referencia de acuerdo con la simulación que se esté llevando
a cabo. Por ejemplo, el nivel de los tanques se representa por unos rectángulos de altura variable.
Para aclarar cuáles son los distintos tanques, se explican a continuación:
• Tanque 1 à Tanque inferior izquierdo • Tanque 2 à Tanque inferior derecho • Tanque 3 à Tanque superior izquierdo • Tanque 4 à Tanque superior derecho
En la parte inferior hay un panel con una serie de botones (CONTROL, PID_SISO y PID_MIMO)
que se van a utilizar para actuar sobre el sistema, y que serán descritos con más detalle a
continuación.
1.1 Pestaña de Control
En la pestaña CONTROL se proporciona un conjunto de sliders, o barras de desplazamiento, así
como una serie de botones que permiten definir diversas situaciones en la dinámica del proceso (por
ejemplo, parar la simulación o actuar sobre las electroválvulas de los desagües de los depósitos).
A continuación se describen las barras de deslizamiento existentes:
• Variador de frecuencia bomba izquierda → Varía la consigna del variador de frecuencia
de la bomba situada a la izquierda del circuito del proceso de 0% a 100%. De esta forma se
puede variar el caudal que llega a la válvula.
• Variador de frecuencia bomba derecha → Varía la consigna del variador de frecuencia de
la bomba situada a la derecha del circuito del proceso de 0% a 100%. De esta forma se
puede variar el caudal que llega a la válvula.

Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 3 -
• Válvula izquierda → Esta válvula neumática de 3 vías tiene una característica lineal e
isoporcentual y permite repartir el agua que le llega de la bomba izquierda hacia los tanques
1 y 4, dependiendo del valor que tome entre 0% y 100%. El 0% representa que todo el agua
va hacia el tanque 1 y el 100% todo hacia el tanque 4. Los valores intermedios reparten agua
a los dos tanques.
• Válvula derecha → Esta válvula neumática de 3 vías tiene una característica lineal e
isoporcentual y permite repartir el agua que le llega de la bomba izquierda hacia los tanques
2 y 3, dependiendo del valor que tome entre 0% y 100%. El 0% representa que todo el agua
va hacia el tanque 2 y el 100% todo hacia el tanque 4. Los valores intermedios reparten agua
a los dos tanques.
• Pulsadores electroválvulas → Son pulsadores de accionamiento de las electroválvulas
Todo-Nada que están situadas en la parte inferior de cada tanque. Al pulsar se abren las
válvulas, aumentando el caudal de evacuación de cada tanque.
Fig. 2 Pestaña CONTROL de la Interfaz
Debajo de los pulsadores de las electroválvulas existe una nueva línea de botones, que es común a
todas las pestañas que permiten al usuario controlar las principales operaciones relativas a la
evolución del sistema. En concreto se pueden realizar las siguientes acciones:
• Iniciar → Inicia la simulación.
• Parar → Detiene la simulación.
• Reiniciar → Reinicia la simulación.

Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 4 -
1.2 Pestaña PID_SISO
En esta pestaña se realiza el control SISO (Single Input Single Output), que actúa sobre el nivel del
tanque 1. Este modo deshabilita el poder actuar sobre el deslizador del variador de frecuencia de la
bomba izquierda, ya que esto lo hace el PID.
En la pestaña PID_SISO (Figura 3) se proporcionan tres campos numéricos que permiten variar los
parámetros del controlador PID del lazo de nivel y otro para introducir una consigna (Setpoint) para
el nivel del tanque 1. Se puede, por tanto, variar el valor de la ganancia proporcional (Kp), el tiempo
integral (Ti) y el tiempo derivativo (Td). Inicialmente tendrán asignados los valores de cero.
Fig. 3 Pestaña PID_SISO de la Interfaz
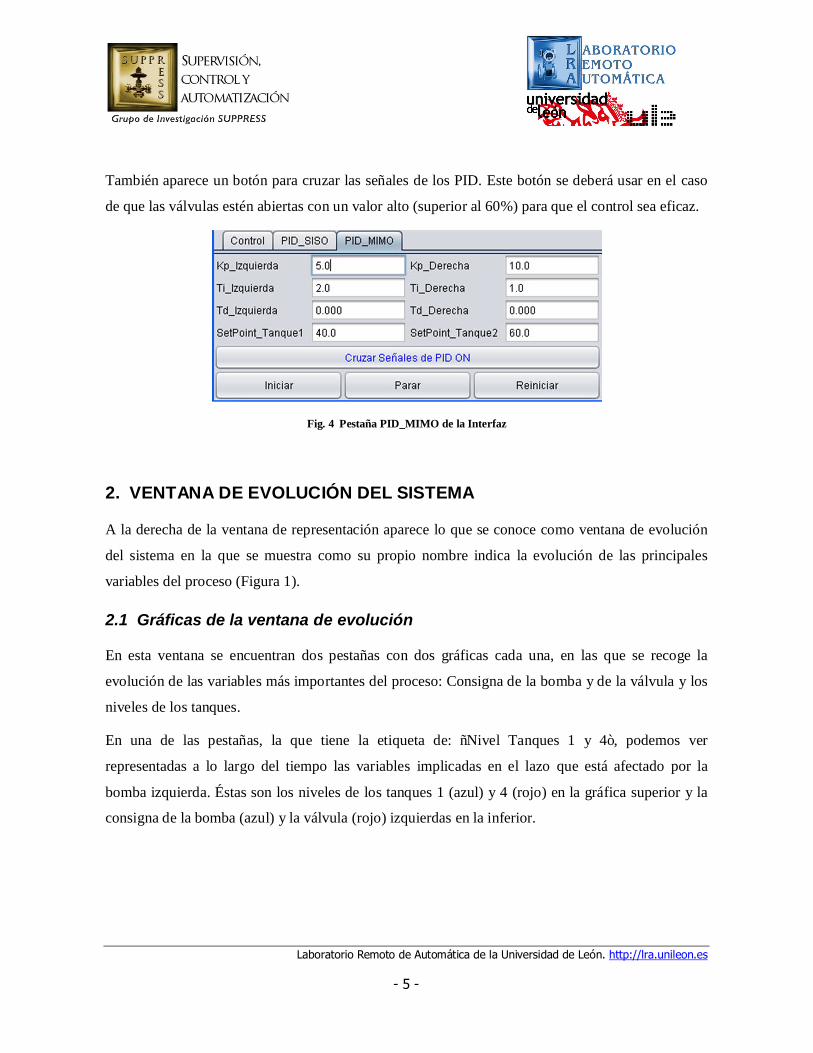
1.3 Pestaña PID_MIMO
En esta pestaña se realiza el control MIMO (Multiple Input Multiple Output), que actúa sobre el
nivel de los tanques 1 y 2. En este modo se deshabilitan los dos deslizadores de las bombas, que se
controlan con los dos PID implementados.
En la pestaña PID_MIMO (Figura 4) se proporcionan cuatro campos numéricos para cada uno de
los dos PID implementados. Tres campos numéricos que permiten variar los parámetros del
controlador PID y otro para introducir una consigna (Setpoint) para el nivel. Se puede, por tanto,
variar el valor de la ganancia proporcional (Kp), el tiempo integral (Ti) y el tiempo derivativo (Td).
Inicialmente tendrán asignados los valores de cero.
Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 5 -
También aparece un botón para cruzar las señales de los PID. Este botón se deberá usar en el caso
de que las válvulas estén abiertas con un valor alto (superior al 60%) para que el control sea eficaz.
Fig. 4 Pestaña PID_MIMO de la Interfaz
2. VENTANA DE EVOLUCIÓN DEL SISTEMA
A la derecha de la ventana de representación aparece lo que se conoce como ventana de evolución
del sistema en la que se muestra como su propio nombre indica la evolución de las principales
variables del proceso (Figura 1).
2.1 Gráficas de la ventana de evolución
En esta ventana se encuentran dos pestañas con dos gráficas cada una, en las que se recoge la
evolución de las variables más importantes del proceso: Consigna de la bomba y de la válvula y los
niveles de los tanques.
En una de las pestañas, la que tiene la etiqueta de: “Nivel Tanques 1 y 4”, podemos ver
representadas a lo largo del tiempo las variables implicadas en el lazo que está afectado por la
bomba izquierda. Éstas son los niveles de los tanques 1 (azul) y 4 (rojo) en la gráfica superior y la
consigna de la bomba (azul) y la válvula (rojo) izquierdas en la inferior.

Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 6 -
Fig. 5 Gráficas para el control de nivel de los tanque 1 y 4
En la otra pestaña, la de la etiqueta “Niveles Tanques 2 y 3”, se representan las variables
correspondientes al lazo controlado por la bomba derecha. En la gráfica superior se representan los
niveles de los tanques 2 (azul) y 3 (rojo) y en la inferior la consigna de la bomba (azul) y válvula
(rojo) de la parte derecha.

Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 7 -
Fig. 6 Gráficas para el control de nivel de los tanque 1 y 4
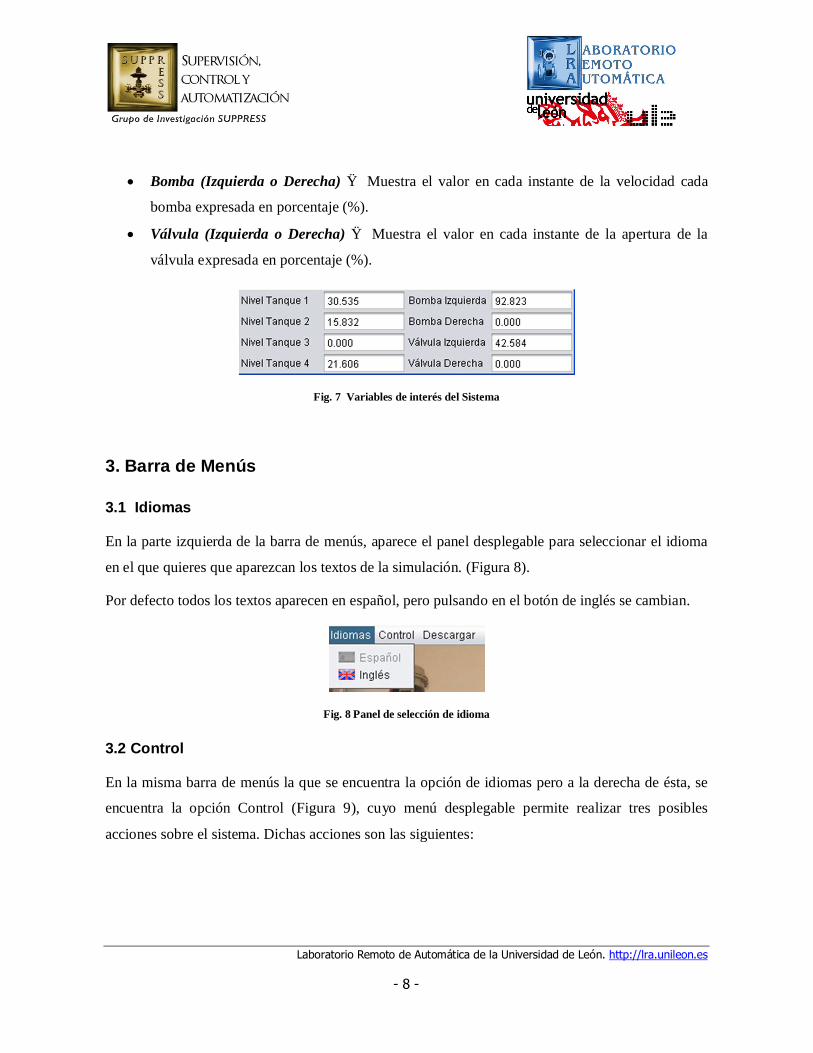
Debajo de las pestañas se muestran un conjunto de campos numéricos que indican el valor de las
distintas variables de interés de la maqueta industrial de 4 tanques.
En concreto están disponibles los siguientes campos:
• Nivel Tanque (1, 2, 3 ó 4) → Muestra el valor en cada instante del nivel del tanque
expresado en porcentaje (%).
Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 8 -
• Bomba (Izquierda o Derecha) → Muestra el valor en cada instante de la velocidad cada
bomba expresada en porcentaje (%).
• Válvula (Izquierda o Derecha) → Muestra el valor en cada instante de la apertura de la
válvula expresada en porcentaje (%).
Fig. 7 Variables de interés del Sistema
3. Barra de Menús
3.1 Idiomas
En la parte izquierda de la barra de menús, aparece el panel desplegable para seleccionar el idioma
en el que quieres que aparezcan los textos de la simulación. (Figura 8).
Por defecto todos los textos aparecen en español, pero pulsando en el botón de inglés se cambian.
Fig. 8 Panel de selección de idioma
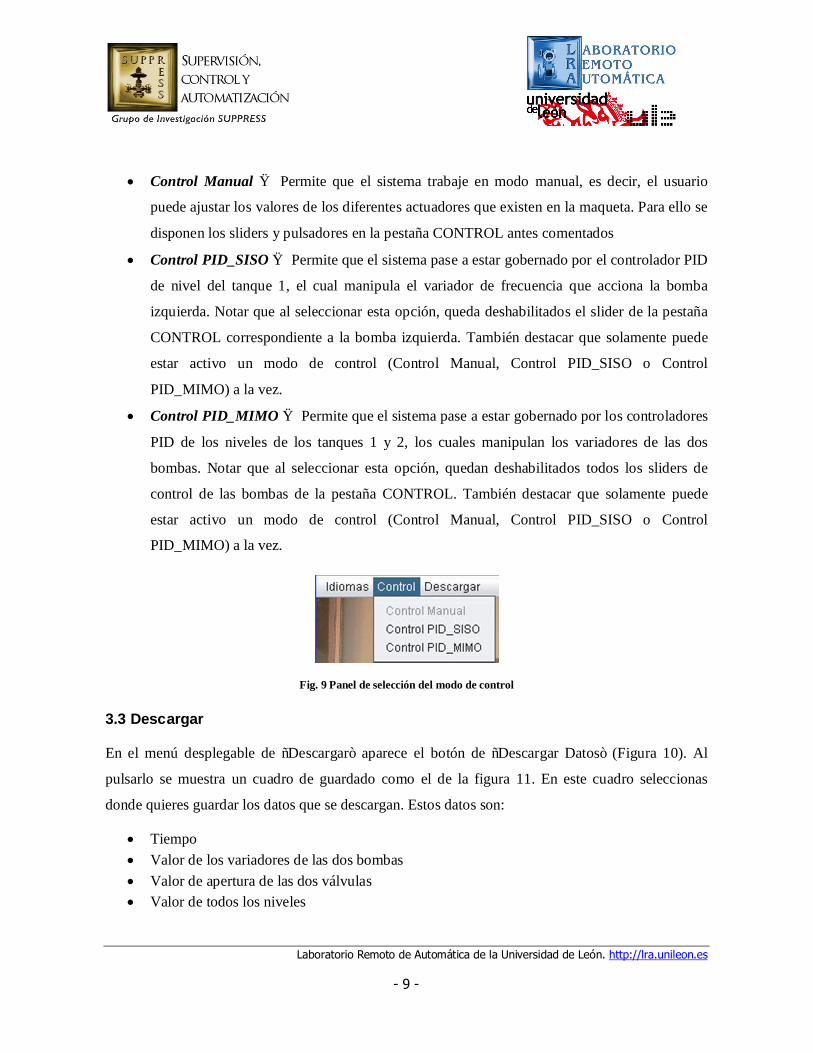
3.2 Control
En la misma barra de menús la que se encuentra la opción de idiomas pero a la derecha de ésta, se
encuentra la opción Control (Figura 9), cuyo menú desplegable permite realizar tres posibles
acciones sobre el sistema. Dichas acciones son las siguientes:
Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 9 -
• Control Manual → Permite que el sistema trabaje en modo manual, es decir, el usuario
puede ajustar los valores de los diferentes actuadores que existen en la maqueta. Para ello se
disponen los sliders y pulsadores en la pestaña CONTROL antes comentados
• Control PID_SISO → Permite que el sistema pase a estar gobernado por el controlador PID
de nivel del tanque 1, el cual manipula el variador de frecuencia que acciona la bomba
izquierda. Notar que al seleccionar esta opción, queda deshabilitados el slider de la pestaña
CONTROL correspondiente a la bomba izquierda. También destacar que solamente puede
estar activo un modo de control (Control Manual, Control PID_SISO o Control
PID_MIMO) a la vez.
• Control PID_MIMO → Permite que el sistema pase a estar gobernado por los controladores
PID de los niveles de los tanques 1 y 2, los cuales manipulan los variadores de las dos
bombas. Notar que al seleccionar esta opción, quedan deshabilitados todos los sliders de
control de las bombas de la pestaña CONTROL. También destacar que solamente puede
estar activo un modo de control (Control Manual, Control PID_SISO o Control
PID_MIMO) a la vez.
Fig. 9 Panel de selección del modo de control
3.3 Descargar
En el menú desplegable de “Descargar” aparece el botón de “Descargar Datos” (Figura 10). Al
pulsarlo se muestra un cuadro de guardado como el de la figura 11. En este cuadro seleccionas
donde quieres guardar los datos que se descargan. Estos datos son:
• Tiempo • Valor de los variadores de las dos bombas • Valor de apertura de las dos válvulas • Valor de todos los niveles

Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es
- 10 -
Fig. 10 Descarga de datos
Fig. 11 Cuadro de diálogo para guardar