
POSGRADO INTERINSTITUCIONAL DE CIENCA Y TECNOLOGÍA · 2019-03-19 · posgrado interinstitucional...
112
POSGRADO INTERINSTITUCIONAL DE CIENCA Y TECNOLOGÍA TESIS DISEÑO DE UN ALGORITMO DE CONTROL PITCH-MICROTAB PARA UN AEROGENERADOR DE EJE HORIZONTAL DE 1.5 MW Que para obtener el grado académico de MAESTRO EN CIENCIA Y TECNOLOGÍA EN MECATRONICA. Presenta ING. HERNÁN RUBÉN OCHOA LAGARDA Director de tesis: DR. JOSE ANTONIO ESTRADA TORRES Co-director de tesis: DR. GUILLERMO MUÑOZ HERNÁNDEZ Querétaro, Querétaro Marzo del 2018
Transcript of POSGRADO INTERINSTITUCIONAL DE CIENCA Y TECNOLOGÍA · 2019-03-19 · posgrado interinstitucional...

POSGRADO INTERINSTITUCIONAL DE CIENCA Y TECNOLOGÍA
TESIS
DISEÑO DE UN ALGORITMO DE CONTROL
PITCH-MICROTAB PARA UN AEROGENERADOR
DE EJE HORIZONTAL DE 1.5 MW
Que para obtener el grado
académico de
MAESTRO EN CIENCIA Y TECNOLOGÍA EN
MECATRONICA.
Presenta
ING. HERNÁN RUBÉN OCHOA LAGARDA
Director de tesis:
DR. JOSE ANTONIO ESTRADA TORRES
Co-director de tesis:
DR. GUILLERMO MUÑOZ HERNÁNDEZ
Querétaro, Querétaro Marzo del 2018

ii
CIENCIA Y TECNOLOGÍA
Director de Posgrado
PICYT – CIDESI
Querétaro
El abajo firmante, miembro del Comité Tutorial del alumno Hernán Rubén Ochoa Lagarda
una vez leída y revisada la Tesis titulada “Diseño de un algoritmo de control pitch-
microtab para un aerogenerador de eje horizontal de 1.5 MW”, acepto que la referida
tesis revisada y corregida sea presentada por el alumno para aspirar al grado de Maestría en
Ciencia y Tecnología en la opción terminal de Mecatrónica durante el Examen de Grado
correspondiente.
Y para que así conste firmo la presente a los 09 días del mes de Marzo del año dos mil
dieciocho
Dr. José Antonio Estrada Torres
Director de Tesis.

iii
Dr. Eloy Edmundo Rodríguez
Vocal.
CIENCIA Y TECNOLOGÍA
Director de Posgrado
PICYT – CIDESI
Querétaro
Los abajo firmantes, miembros del Comité Tutorial del alumno Hernán Rubén Ochoa
Lagarda, una vez leída y revisada la Tesis titulada “Diseño de un algoritmo de control
pitch-microtab para un aerogenerador de eje horizontal de 1.5 MW”, aceptamos que la
referida tesis revisada y corregida sea presentada por el alumno para aspirar al grado de
Maestría en Ciencia y Tecnología en la opción terminal de mecatrónica durante el Examen
de Grado correspondiente.
Y para que así conste firmamos la presente a los 09 días del mes de Marzo del año dos mil
dieciocho.
Dr. José Antonio Estrada Torres
Dr. Ing. Gengis K. Toledo Ramírez
Secretario

iv
Agradecimientos
A mi familia, que siempre estuvo ahí para apoyarme incondicionalmente en
cada una de las etapas de mi carrera profesional y por alentar mi gusto por la
investigación.
A CONACYT por el apoyo brindado durante mi curso del posgrado y las
oportunidades y herramientas de desarrollo que puso al alcance para el
crecimiento intelectual y profesional.
A la institución de CIDESI y sus maestros, por las enseñanzas y el apoyo
incondicional en pro del cultivo del conocimiento.
A mis asesores, que fueron base del conocimiento y del fruto que rindió el
presente trabajo.

v
Contenido
LISTA DE FIGURAS ........................................................................................... VIII
LISTA DE TABLAS ................................................................................................ X
CAPÍTULO 1 INTRODUCCIÓN ............................................................................. 11
1.1 Panorama mundial .......................................................................................................... 11
1.2 Energía eólica en México ............................................................................................... 13
1.3 Aerogeneradores (AG) ................................................................................................... 14
1.3.1 AG de tipo eje horizontal ........................................................................................ 14
1.3.2 AG de tipo eje vertical ............................................................................................ 15
1.4 Componentes de un AG de eje horizontal...................................................................... 17
1.5 Aerodinámica del rotor del AG ...................................................................................... 18
1.5.1 Perfil aerodinámico ................................................................................................. 19
1.5.2 Contenido energético del viento. ............................................................................ 22
1.5.3 Coeficiente de potencia. .......................................................................................... 24
1.5.4 Velocidad de punta de pala λ (Tip speed ratio) ...................................................... 25
1.5.5 Influencia del ángulo pitch β sobre la transmisión de energía al AG. ................... 25
1.6 Sistema de control .......................................................................................................... 26
1.6.1 Regiones de operación ............................................................................................ 28
CAPÍTULO 2 PLANTEAMIENTO DEL PROBLEMA ............................................ 30
2.1 Controlador de torque del generador.............................................................................. 31
2.2 Controlador colectivo de pitch ....................................................................................... 31
2.2.1 Desventajas de los controladores de ángulo de paso clásico y métodos alternos para
minimizarlas. .................................................................................................................... 32
2.3 Justificación.................................................................................................................... 36
2.4 Hipótesis ......................................................................................................................... 37

vi
2.5 Objetivo general ............................................................................................................. 37
2.6 Objetivos específicos y alcance ..................................................................................... 37
2.7 Metodología ................................................................................................................... 38
CAPÍTULO 3 ESTADO DEL ARTE ....................................................................... 39
3.1 Trabajos precedentes en simulación de microtabs ......................................................... 39
CAPÍTULO 4 ANTECEDENTES ........................................................................... 41
4.1 Modelado de un aerogenerador ...................................................................................... 41
4.1.1 Modelo simple de 2 masas ...................................................................................... 41
4.2 Software de modelado FAST ......................................................................................... 45
4.2.1 Descripción del modelo en FAST ........................................................................... 46
4.2.2 Sistemas de coordenadas ......................................................................................... 47
4.2.3 Arquitectura de FAST8 ........................................................................................... 47
4.3 Controlador simple de velocidad variable en la región 2 ............................................... 50
4.4 Controlador de torque de velocidad variable en FAST .................................................. 53
4.5 Controlador pitch de potencia simple en la región III ................................................... 55
4.6 Función de transferencia a lazo cerrado ......................................................................... 56
4.7 Controlador pitch de ganancias programadas ................................................................ 57
CAPÍTULO 5 DESARROLLO DE SIMULACIONES ............................................. 61
5.1 Caracterización del AG de 1.5 MW ............................................................................... 63
5.1.1 Definición de parámetros mecánicos, elásticos y aerodinámicos ........................... 63
5.1.2 Configuración del generador eléctrico .................................................................... 64
5.2 Curva de coeficiente de potencia ................................................................................... 66
5.3 Implementación del controlador de torque en la región II ............................................. 67
5.3.1 Obtención de la constante K ................................................................................... 67
5.3.2 Cálculo de pendiente en la región de transición entre II y III. ................................ 68

vii
5.4 Implementación del controlador en la región III ............................................................ 69
5.4.1 Cálculo de punto de operación ............................................................................... 70
5.4.2 Linealización ........................................................................................................... 72
5.4.3 Espacio de estados y función de transferencia ........................................................ 73
5.4.4 Control proporcional-integral (PI) de pitch............................................................. 74
5.4.5 Control PI con ganancias programadas ................................................................... 77
5.5 Implementación de microtabs en el código de FAST .................................................... 79
5.5.1 Especificación de los microtabs .............................................................................. 79
5.5.2 Caracterización de perfil aerodinámico para Microtabs ......................................... 81
5.5.3 Modificación del código de FAST .......................................................................... 85
5.5.4 Influencia de la activación de microtabs en el la dinámica del AG. ....................... 87
CAPÍTULO 6 ANÁLISIS Y RESULTADOS ........................................................... 90
6.1 Análisis comparativo con y sin control de torque .......................................................... 90
6.2 Control PI clásico vs PI con ganancias programadas..................................................... 92
6.3 Análisis de respuesta con y sin microtabs. ..................................................................... 97
6.4 Respuesta de microtabs a frecuencia de viento. ............................................................. 99
CAPÍTULO 7 CONCLUSIONES .......................................................................... 102
7.1 Trabajo futuro............................................................................................................... 104
BIBLIOGRAFÍA ................................................................................................... 106

viii
Figura 1.1. Crecimiento mundial en capacidad instalada hasta 2016 (MW) ....................... 12 Figura 1.2. Reducción acumulativa en millones de toneladas de emisiones de CO2 ........... 12 Figura 1.3. Lista de países líderes en la producción de energía eólica hasta 2016. ............. 13
Figura 1.4. Clasificación de aerogeneradores según eje y número de palas ........................ 16 Figura 1.5. Comparación de la eficiencia entre varios tipos de AG. ................................... 17 Figura 1.6. Principales partes que componen a un aerogenerador de eje horizontal ........... 18 Figura 1.7. Parámetros importantes del perfil aerodinámico de un aerogenerador. ............ 19 Figura 1.8. Fuerza resultante F, sustentación L y arrastre D. (Sathyajith, M. (2006) .......... 20
Figura 1.9. Efecto del ángulo de ataque sobre la sustentación del perfil ............................. 21 Figura 1.10. Vista de sección transversal de velocidades actuando sobre un perfil. ........... 22 Figura 1.11. Plano vectorial de fuerzas actuando sobre un perfil de una pala de un AG de
eje horizontal. ........................................................................................................... 24
Figura 1.12. Coeficiente de potencia en función de β y λ .................................................... 26 Figura 1.13. Control supervisor de la turbina de viento ....................................................... 28
Figura 1.14. Curva típica de potencia de un aerogenerador de velocidad variable ............. 29 Figura 2.1. Esquema de control típico en turbinas eólicas ................................................... 30 Figura 2.2. Transición pobre de la turbina CART entre las regiones II y III. ...................... 33
Figura 2.3. Sistemas de control de cargas aerodinámicas .................................................... 34 Figura 2.4. Control de cargas rotacional (Flap) y control de carga deslizante (Microtab) .. 35
Figura 4.1. Superficies de los coeficientes de potencia y torque para la turbina CART ..... 43 Figura 4.2. Modelo de 2 masas de un aerogenerador ........................................................... 43
Figura 4.3. Modelo reducido de una masa ........................................................................... 45 Figura 4.4. Interfaz de FAST con Simulink. ........................................................................ 46
Figura 4.5. Sistemas de coordenadas ................................................................................... 48 Figura 4.6. Sistemas de coordenadas de las palas ................................................................ 49 Figura 4.7. Módulos que componen a FAST ....................................................................... 49
Figura 4.8. Gráfica ejemplo de superficie Cp (λ,β). ............................................................. 51 Figura 4.9. Función Tg (Ω) de la región 2 ½ de operación. ................................................. 53
Figura 4.10. Desempeño del control clásico a diferentes puntos de operación ................... 58 Figura 4.11. Variación de las ganancias de entradas de control respecto al ángulo pitch. .. 59 Figura 4.12. Diagrama a bloques del controlador con ganancias programadas ................... 60 Figura 4.13. Desempeño del control a diferentes puntos de operación ............................... 60 Figura 5.1. Circuito equivalente de Thevenin utilizado por FAST. ..................................... 65
Figura 5.2. Curvas de Cp-TSR (λ)-β. La línea roja punteada muestra el punto óptimo de
eficiencia aerodinámica. .......................................................................................... 67
Figura 5.3. Proceso de obtención del deslizamiento del generador eléctrico documentado
por Wright. ............................................................................................................... 68 Figura 5.4. Gráfico de torque del rotor en función del ángulo pitch. Velocidad angular del
rotor fija (Ωr= 20.5 rpm). ......................................................................................... 71 Figura 5.5. Respuesta a escalón del modelo no lineal para diferentes valores de
amortiguamiento. Frecuencia natural fija (wn=0.6). ............................................... 76

ix
Figura 5.6. Respuesta a escalón del modelo no lineal para diferentes valores frecuencia
natural. (𝜹 = 𝟎. 𝟕). ................................................................................................... 77 Figura 5.7. Secciones de AeroDyn. ...................................................................................... 80 Figura 5.8. Representación de la pala seccionada y posición de microtabs. ........................ 81
Figura 5.9. Reducción de 𝑪𝑳respecto a 𝜶. Resultados de túnel de viento obtenido en
CIDESI ..................................................................................................................... 82
Figura 5.10. Diagrama de flujo de activación de microtabs desde Simulink. ...................... 83 Figura 5.11. Habilitación de entrada de Microtabs en el bloque de FAST en Simulink. .... 85 Figura 5.12. Perfil de viento con escalones.......................................................................... 87 Figura 5.13. Perfil de viento IEC Kaimal. ........................................................................... 88 Figura 6.1. Gráfico comparativo torque-velocidad angular. ................................................ 91
Figura 6.2. Gráfica comparativa de eficiencia aerodinámica. .............................................. 92 Figura 6.3. Reducción de sobrepaso con un escalón de viento mayor. ................................ 93
Figura 6.4. Gráfico para la función GK. .............................................................................. 94
Figura 6.5. Respuestas en distintos escalones de viento para ambos controladores. ........... 95 Figura 6.6. Respuesta de velocidad del generador para PI y GS. ........................................ 96 Figura 6.7. Respuesta en el actuador de pitch. ..................................................................... 97
Figura 6.8. Momento de flap obtenido de las pruebas 1 a la 3. ........................................... 98 Figura 6.9. Respuesta del actuador de pitch durante las pruebas 1 a la 3. ........................... 99
Figura 6.10. Momento de flap obtenido en distintos tiempos de activación de microtabs. 100 Figura 6.11. Respuesta del actuador de pitch para distintos tiempos de activación de
microtabs. ............................................................................................................... 101

x
Tabla 1.1 Parques eólicos en operación en México en 2014 ............................................... 14 Tabla 1.2. Ventajas y desventajas de un AG de eje vertical ................................................ 15 Tabla 4.1. Descripción detallada de los parámetros a utilizar en Servodyn. ........................ 54
Tabla 5.1. Lista de parámetros para el AG de 1.5 MW diseñado por NREL. ..................... 63 Tabla 5.2. Parámetros para la configuración del circuito de Thevenin dentro del código de
FAST. ....................................................................................................................... 65 Tabla 5.3. Valores calculados para los parámetros de ServoDyn para el control de
velocidad simple en la región 2. .............................................................................. 69
Tabla 5.4. Lista de puntos de operación obtenidos de la simulación. .................................. 72 Tabla 5.5. Parámetros de entrada/salida presentes en la linealización. ................................ 74 Tabla 5.6. Valores de B para todos los puntos de operación. .............................................. 78
Tabla 5.7. Reducción de coeficiente de levantamiento en función del ángulo de ataque. ... 82
Tabla 5.8. Principales parámetros de perfil de viento generado en TurbSim ...................... 88 Tabla 5.9. Matriz experimental para el estudio de microtabs en FAST. .............................. 89

En el año 2012, el Banco Mundial mencionó dentro de su apartado de indicadores de energía y minería
que en medida del aumento de la población mundial y la industrialización de las economías, las fuentes
de energía no renovable se tornarán más escasas y costosas, haciendo de vital importancia la
independencia energética que existe hacia los combustibles fósiles y acelerar la transición a fuentes
de energía sustentables. Dado esto, la Agencia de Energía Internacional (IEA) en 2015 realizó un
extracto de balances de energía en países pertenecientes a la Organización de Cooperación y
Desarrollo Económico (OECD) donde muestra que el suministro total de energía primaria proveniente
de combustibles fósiles para generación de electricidad se redujo en 160 TWh de 2013 a 2014,
mientras que el aporte eléctrico de otras fuentes principalmente solar, eólica y biocombustibles
incrementó en 1,000 TWh en ese mismo periodo de tiempo. Estas cifras muestran que hay un
crecimiento traducido en oportunidades para la industria de energías limpias [1].
Según la asociación mundial de energía eólica (WWEA por sus siglas en inglés) el año 2014 trajo un
crecimiento significativo, ya que más de 50 GW en aerogeneradores fueron instalados durante ese
año, dando un aproximado de 370 GW de capacidad instalada en la actualidad. La Figura 1.1 [2]
muestra que esta tendencia de crecimiento se ha mantenido constante desde 2001. Este crecimiento
trae grandes beneficios según predice la Global Wind Energy Outlook (GWEO) para los años 2020,
2030 y 2050, ya que se presentará una reducción acumulativa en las emisiones de CO2 a la atmósfera
generando energía a partir del viento como se observa en la Figura 1.2 [3].

Capítulo 1
12
Figura 1.1. Crecimiento mundial en capacidad instalada hasta 2016 (MW). (GWEC (2016), Global Wind Report).
Figura 1.2. Reducción acumulativa en millones de toneladas de emisiones de CO2. (GWEC (2016), Global Wind Report).
Como se observa en la Figura 1.3 [2], los cinco primeros países en materia de capacidad instalada,
aportan más del 50% de la energía mundial proveniente de la energía del viento. A pesar de que existe
estancamiento en algunos países como España (crecimiento menor a 1 GW en 2014), se trabaja en
políticas y reformas energéticas para re-impulsar esta economía.

Capítulo 1
13
Figura 1.3. Lista de países líderes en la producción de energía eólica hasta 2016. (GWEC (2016), Global Wind Report).
Durante el 2014 México añadió 633.7 MW en instalaciones de energía eólica a la red eléctrica, con
una capacidad total de 2.5 GW distribuida entre los estados de Oaxaca, Baja California, Chiapas,
Jalisco, Tamaulipas, San Luis Potosí y Nuevo León. Este crecimiento es debido en gran parte al
programa de “temporada abierta” organizado en Oaxaca así como al continuo crecimiento en las
instalaciones en otros estados, esperando instalar para el 2018 alrededor de 9500 MW. Este
crecimiento ha sido asistido por tecnología de importación por parte de empresas como Gamesa,
Iberdrola y Acciona provenientes de España y empresas estadounidenses como son FPL Group,
General Electric, Broadwind Energy, dando a conocer la fuerte inversión que se ha empezado a hacer
en este sector.
Actualmente, se han logrado poner en marcha 6 parques de generación de energía eólica en México,
la mayoría con apenas un año de operación, lo cual marca un importante paso en la transición hacia

Capítulo 1
14
energías limpias (Tabla 1.1); México pretende llegar a producir hasta un 8% de energía eólica para el
consumo eléctrico total en el país para 2018 [3].
Tabla 1.1 Parques eólicos en operación en México en 2014. Adaptado de GWEC (2014), Global Wind Report.
Proyecto Lugar Capacidad
(MW)
Piedra Larga II Oaxaca 138
Bii Hioxo Oaxaca 227
El Porvenir Tamaulipas 54
Bii Nee Stipa II Fase IV Dos arbolitos Oaxaca 70
Sureste I Fase II Oaxaca 102
Dominica Fase I San Luis Potosí 100
La energía disponible en el viento es básicamente la energía cinética proveniente de las grandes masas
de aire en movimiento sobre la superficie terrestre. Una turbina eólica o aerogenerador (AG) es una
máquina electromecánica que obtiene su potencia convirtiendo la fuerza del viento en torque. Dicho
torque se genera debido a la energía cinética capturada por las palas del AG [4].
Los AG se clasifican comúnmente como: AG de eje horizontal y vertical. Esta manera de clasificar se
basa en la posición del rotor del AG con respecto a la dirección del viento.
Éste tipo de AG tienen el eje de rotación horizontal al suelo y paralelo a la corriente del viento. Estos
son los más utilizados comercialmente y la mayoría de las turbinas existentes en el mundo caen en
esta categoría. Estos tipos de aerogeneradores presentan distintas ventajas velocidades de viento bajas
para el encendido, mayor eficiencia en la captura de energía con respecto a los de eje vertical y fácil
posicionamiento a la dirección del viento. Por otra parte, presentan desventajas como un diseño

Capítulo 1
15
complejo y caro, además de que el sistema de direccionamiento hacia la corriente de viento es
imperativo para la máxima captura de energía [6].
A su vez, pueden clasificarse dependiendo del número de palas que tenga el rotor. Pueden ser
monopala, bipala, tripala y multipala. Los rotores monopala y bipala son utilizados en menor medida
que los tripala ya que presentan problemas de balanceo y aceptabilidad visual. Comercialmente los
tripala son los que dominan el mercado en generación de electricidad.
El eje de rotación de una turbina de eje vertical se encuentra vertical al piso y perpendicular a la
dirección del viento. En la Tabla 1.2 se resumen las ventajas y desventajas más importantes de éste
tipo de AG. Sus aplicaciones más comunes son en sistemas de baja potencia y localización
completamente al aire libre.
Tabla 1.2. Ventajas y desventajas de un AG de eje vertical. Adaptado de Sathyajith, M. (2006). Wind Energy Fundamentals, Resource Analysis and Economics).
Ventajas Desventajas
Recepción de energía del viento en todas
direcciones, por lo que dispositivos de
direccionamiento son innecesarios.
Dado que no son dispositivos de “auto-inicio”,
mecanismos de arranque adicionales son
requeridos.
Las partes mecánicas pueden ser ajustadas a
nivel del suelo y por lo tanto el mantenimiento
es más accesible.
Las palas pasan por zonas “muertas”
aerodinámicas, por lo que la eficiencia en cada
vuelta disminuye.
Los sistemas de control aerodinámico son
innecesarios y son eliminados.
El mecanismo es más propenso a daños en altas
revoluciones si no se tiene un control adecuado.
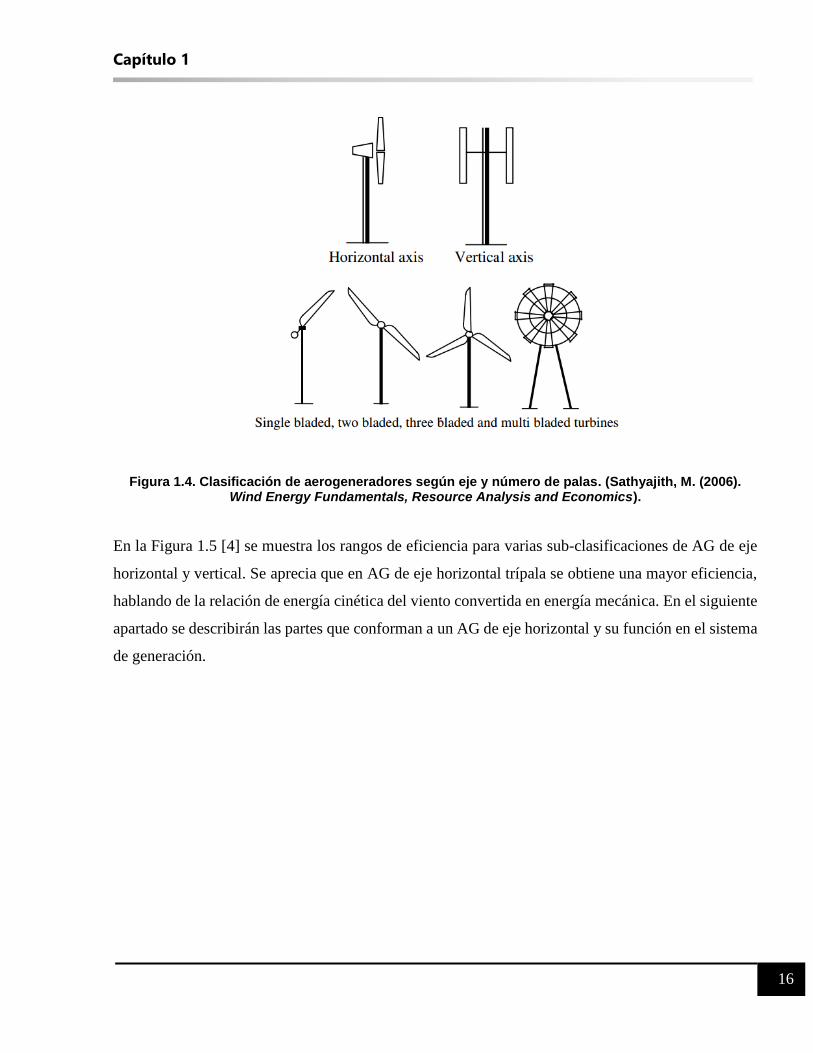
En la Figura 1.4 [4] se muestran las clasificaciones de aerogeneradores según la orientación de su eje,
así como la sub-clasificación de tipo eje horizontal en base al número de palas en el rotor.
Capítulo 1
16
Figura 1.4. Clasificación de aerogeneradores según eje y número de palas. (Sathyajith, M. (2006). Wind Energy Fundamentals, Resource Analysis and Economics).
En la Figura 1.5 [4] se muestra los rangos de eficiencia para varias sub-clasificaciones de AG de eje
horizontal y vertical. Se aprecia que en AG de eje horizontal trípala se obtiene una mayor eficiencia,
hablando de la relación de energía cinética del viento convertida en energía mecánica. En el siguiente
apartado se describirán las partes que conforman a un AG de eje horizontal y su función en el sistema
de generación.

Capítulo 1
17
Figura 1.5. Comparación de la eficiencia entre varios tipos de AG. (Sathyajith, M. (2006). Wind Energy Fundamentals, Resource Analysis and Economics).
En la Figura 1.6 [5] se describen a detalle los componentes típicos de una turbina de eje horizontal.
Los componentes que son visibles a simple vista desde el suelo son la torre, la góndola (nacelle) y el
rotor. Como se mencionó en el apartado 1.3, las palas con forma perfilada capturan la energía cinética
del viento y la transforman en energía cinética rotacional traducida en torque para el rotor. El rotor
por consecuencia mueve el eje de baja velocidad y éste a su vez la caja de engranes. La caja de
engranes multiplica las revoluciones del eje de baja velocidad y mueve el eje del generador mediante
el eje de alta velocidad. La caja de engranes, los ejes de baja y alta velocidad y el generador se
encuentran dentro de la góndola. En los últimos años se han estado desarrollando esquemas de

Capítulo 1
18
aerogeneradores sin caja de transmisiones con el fin de eliminar el costo de construcción y
mantenimiento de dicho elemento [5].
Figura 1.6. Principales partes que componen a un aerogenerador de eje horizontal. (Pao,L.Y. & Jhonson, K.E. (2011), Control of Wind Turbines: Approaches, challenges and recent developments)
Los principios aerodinámicos se basan en el comportamiento de algún fluido al provocar movimiento
sobre el cuerpo que fluye a través de él. Durante muchos años se ha trabajado para poder definir los
fundamentos del comportamiento de fluido sobre un cuerpo y así obtener conocimiento suficiente en
la fabricación de estos sistemas; inicialmente se utilizó el estudio hecho para aviones y helicópteros
como base de fabricación de turbinas eólicas. En la actualidad ya se ha desarrollado y enriquecido
conocimiento específico para ésta área de la ingeniería.

Capítulo 1
19
En el diseño de sistemas de control es muy importante conocer el comportamiento de los perfiles
aerodinámicos y las fuerzas que ejerce el viento sobre el mismo. En la Figura 1.7 [4] se observa la
vista de sección transversal de un perfil mostrando como son el ángulo de ataque (angle of attack), la
cuerda (chord line), el borde frontal (leading edge) y el borde de arrastre (trailing edge).
Figura 1.7. Parámetros importantes del perfil aerodinámico de un aerogenerador. (Sathyajith, M. (2006). Wind Energy Fundamentals, Resource Analysis and Economics).
Cuando un perfil se coloca en una ráfaga de aire, el viento pasa por las superficies inferior y superior
de la pala. Debido a la curvatura que presenta la pala, el aire que fluye por la parte superior tiene una
velocidad mayor que el aire fluyendo por la parte inferior; de acuerdo con el principio de Bernoulli,
las partículas del fluido con mayor velocidad producirán una baja presión en la parte superior, mientras
que en el lado inferior se producirá una mayor presión. Esta diferencia de presiones producirá una
fuerza resultante F actuando sobre el perfil, que tendrá una fuerza componente perpendicular a la
velocidad tangencial de la pala llamada sustentación (Lift) y otra fuerza componente paralela a la
velocidad tangencial de la pala llamada fuerza de arrastre (Drag) (Figura 1.8) [4].
La fuerza de sustentación está dada por la Ecuación ( 1.1) como:

Capítulo 1
20
𝐿 = 𝐶𝐿1
2𝜌𝐴𝑉2 ( 1.1)
Donde el factor CL es el coeficiente de sustentación, ρ la densidad del aire, A el área del disco del rotor
y V la velocidad del viento. En cambio, la fuerza de arrastre viene dada por la Ecuación 1.2 y se
observa que respectivamente tiene un coeficiente de arrastre CD.
𝐷 = 𝐶𝐷1
2𝜌𝐴𝑉2 (1.2)
Figura 1.8. Fuerza resultante F, sustentación L y arrastre D. (Sathyajith, M. (2006). Wind Energy Fundamentals, Resource Analysis and Economics).
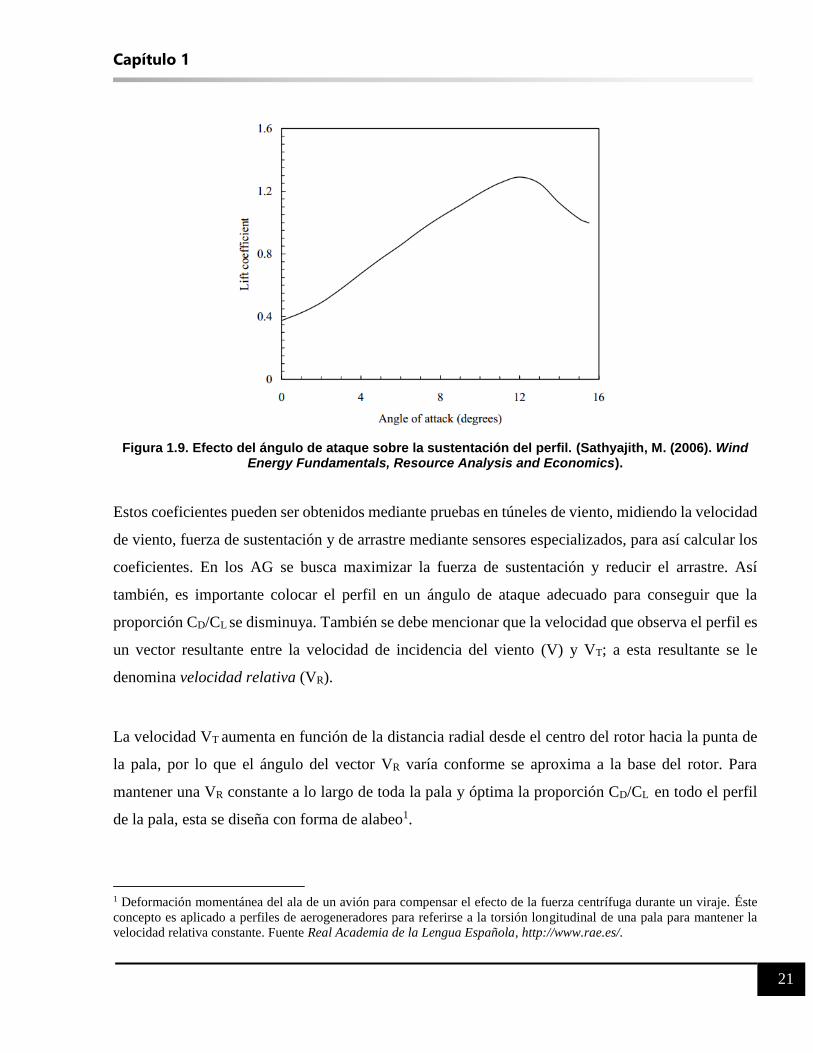
Las fuerzas de arrastre y sustentación se encuentran influenciadas por el ángulo de ataque (α) que es
el ángulo que hay entre el eje de rotación de la pala (Figura 1.10) y la cuerda del perfil. Conforme se
aumenta α, se reduce la sustentación; cuando α sigue incrementándose, la fuerza de sustentación llega
a su máximo y después empieza a caer rápidamente por entrar a una excesiva región de turbulencia.
Es aquí donde empieza a elevarse de manera abrupta la fuerza de arrastre, produciendo el denominado
fenómeno de pérdida de sustentación. En la Figura 1.9 [4] se ilustra la gráfica de comportamiento de
fuerza de sustentación conforme el cambio del ángulo de ataque.
Capítulo 1
21
Figura 1.9. Efecto del ángulo de ataque sobre la sustentación del perfil. (Sathyajith, M. (2006). Wind Energy Fundamentals, Resource Analysis and Economics).
Estos coeficientes pueden ser obtenidos mediante pruebas en túneles de viento, midiendo la velocidad
de viento, fuerza de sustentación y de arrastre mediante sensores especializados, para así calcular los
coeficientes. En los AG se busca maximizar la fuerza de sustentación y reducir el arrastre. Así
también, es importante colocar el perfil en un ángulo de ataque adecuado para conseguir que la
proporción CD/CL se disminuya. También se debe mencionar que la velocidad que observa el perfil es
un vector resultante entre la velocidad de incidencia del viento (V) y VT; a esta resultante se le
denomina velocidad relativa (VR).
La velocidad VT aumenta en función de la distancia radial desde el centro del rotor hacia la punta de
la pala, por lo que el ángulo del vector VR varía conforme se aproxima a la base del rotor. Para
mantener una VR constante a lo largo de toda la pala y óptima la proporción CD/CL en todo el perfil
de la pala, esta se diseña con forma de alabeo1.
1 Deformación momentánea del ala de un avión para compensar el efecto de la fuerza centrífuga durante un viraje. Éste
concepto es aplicado a perfiles de aerogeneradores para referirse a la torsión longitudinal de una pala para mantener la
velocidad relativa constante. Fuente Real Academia de la Lengua Española, http://www.rae.es/.

Capítulo 1
22
Figura 1.10. Vista de sección transversal de velocidades actuando sobre un perfil. (Sathyajith, M. (2006). Wind Energy Fundamentals, Resource Analysis and Economics).
Como se observó, el viento al incidir desde cierto ángulo de ataque genera una fuerza de rotación que
genera electricidad debido a la excitación del estator del generador. La cantidad de energía que se
genera está definida por la densidad (ρ) y velocidad del viento (V), y el área de barrido (A), por lo que
el fluido tendrá un cambio de volumen por unidad de longitud l que es:
∆𝑣 = 𝐴 ∙ ∆𝑙 (1.3)
𝑉 = ∆𝑙
∆𝑡 (1.4)
∆𝑣 = 𝐴 ∙ 𝑉 ∙ ∆𝑡 (1.5)
Donde v representa el volumen. Dado que la energía del viento está dada como la energía cinética (E),
es caracterizada como:
𝐸 =1
2𝑚𝑉2 (1.6)

Capítulo 1
23
Como se comentó, el cambio en la energía está influido por el cambio que hay en la masa del aire con
una densidad específica ρ donde:
𝑚 = 𝑣 ∙ 𝜌 (1.7)
Donde m es la masa del flujo de aire. Sustituyendo v y m en la Ecuación 1.6, la ecuación de la energía
es:
𝐸 =1
2𝐴𝜌𝑡𝑉3 (1.8)
Puede apreciarse de la Ecuación (1.8) que la energía cinética se relaciona por el cubo de la velocidad
del viento aproximadamente. Se sabe que la potencia es la cantidad de energía (o trabajo) realizado
por unidad de tiempo, por lo cual dividiendo la Ecuación (1.8) en ambos lados sobre el tiempo se
tiene:
𝑃 =𝐸
𝑡=1
2𝐴𝜌𝑉3 (1.9)
Esta potencia generada es traducida en torque. En la Figura 1.11 se representa una versión más
compleja del perfil aerodinámico. Aquí se observa que las velocidades 𝑉0 y 𝑉𝑇 (velocidad de viento
incidente y velocidad tangencial) generan el vector resultante 𝑉𝑅 (tomando en cuenta el sentido de
rotación contrario a la componente 𝑉𝑇). Debido al efecto de diferencia de presiones ya explicado
anteriormente, se tiene una fuerza de levantamiento (𝐹𝐿) como resultante perpendicular a 𝑉𝑅. Por otra
parte, la fuerza de arrastre (𝐹𝐷) se presenta en paralelo con 𝑉𝑅. El ángulo β se forma entre la cuerda y
el plano de rotación de la pala. Es importante el entendimiento de éste plano de interacción entre
vectores de velocidad de viento y fuerza, para comprender como el ángulo de pitch tiene influencia
en dicha interacción.

Capítulo 1
24
Figura 1.11. Plano vectorial de fuerzas actuando sobre un perfil de una pala de un AG de eje horizontal. Adaptado de Bianchi, F.D, De Battista, H. y Mantz, R.J. (2007), Wind Turbine Control
Systems.
Dependiendo del diseño del aerogenerador y sus dimensiones, se obtendrá un rendimiento diferente
respecto a la potencia del viento que es transferida al rotor. El coeficiente de potencia define de manera
adimensional ésta relación y es el cociente entre la potencia existente en el rotor y la potencia
procedente del viento. El coeficiente puede ser afectado en medida de las pérdidas mecánicas entre la
caja de engranes, la fricción de las partes móviles y las pérdidas en el generador [4].
𝐶𝑃 =𝑃𝑅𝑃𝑉
(1.10)
VT V
R
V0
Plano de rotación
α
Cuerda
β
FL
FD

Capítulo 1
25
λ
Cuando se tiene una masa de aire fluyendo a través de un aerogenerador, hay una dependencia entre
la velocidad relativa que experimenta la punta de la pala durante la rotación y la velocidad con la que
incide el viento sobre el área circular creada por las palas durante dicha rotación. Si existe una
velocidad relativa de punta de pala muy lenta (low tip speed) y el viento está incidiendo con una alta
velocidad, se estará escapando una porción de masa de viento entre las palas sin generar ninguna
transferencia de energía. En caso contrario, si la velocidad relativa de la punta de pala es muy alta y
el viento incide con velocidad muy baja es desviado por la formación de turbulencia debido a la alta
velocidad del rotor. En ambos casos se provoca una pérdida en la transferencia de potencia al rotor,
por lo que se ha utilizado el parámetro λ llamado tip speed ratio con el fin de visualizar la relación
entre la velocidad angular de la punta de la pala y la velocidad de viento que incide.
𝜆 =𝑅𝛺
𝑉=2𝜋𝑅𝑁
𝑉 (1.11)
Donde R es el radio de la circunferencia creada por las palas, Ω es la velocidad angular (en radianes/s),
N es la velocidad rotacional y V la velocidad de incidencia del viento. Según Sathyajith [4], el factor
λ también puede ser expresado en función del coeficiente de potencia CP y el coeficiente de torque
CT (Ecuación (1.12)).
𝜆 =𝐶𝑃𝐶𝑇
(1.12)
β
Al incidir una velocidad de viento sobre la pala se genera el fenómeno de sustentación ya explicado
en apartados anteriores. Cuando la pala empieza a girar sobre el eje del rotor se produce una velocidad
tangencial, la cual junto con la velocidad de incidencia del viento crean un vector de velocidad
relativa. Este ángulo de velocidad relativa forma un ángulo α de ataque con la cuerda de la pala y un

Capítulo 1
26
ángulo β con el plano de giro del rotor. Como fue visto, el coeficiente de potencia es la fracción de
potencia del viento que es transmitida al rotor; éste coeficiente depende inherentemente del factor λ y
el ángulo β. En la Figura 1.12 [6] se muestra una gráfica donde se tiene en el eje horizontal diferentes
valores de λ y en el eje vertical los puntos de Cp que se alcanzan para distintos ángulos β. Se puede
notar en la gráfica que la tendencia decreciente de la curva del coeficiente de potencia respecto a λ se
presenta conforma aumenta el ángulo pitch. Adicionalmente, Fernández [7] menciona que la máxima
potencia extraída del viento es maximizada cuando la velocidad del rotor es tal que el valor de
coeficiente de potencia es el máximo obtenido para un λ y β dado. La Figura 1.12 [6] muestra una
función genérica Cp (λ, β), teniendo un máximo en Cp (λ0, β0).
Figura 1.12. Coeficiente de potencia en función de β y λ. (Bianchi, F.D. et. Al. (2007), Wind Control
Systems).
Para cada turbina, se deben determinar ciertos objetivos de operación que la lleven a obtener el mejor
desempeño posible; estos se cumplen gracias a la estrategia definida dentro del sistema de control. Se
le llama estrategia de control a la programación que deberá darse a la turbina para aproximarse lo más
cercano posible a la curva de operación potencia-velocidad de viento ideal, determinando los valores
adecuados de los puntos de operación de la turbina. Típicamente para la región I se tiene un monitoreo
del sistema. Para la región II, donde aún no se ha alcanzado la velocidad nominal de operación, se

Capítulo 1
27
requiere extraer la máxima cantidad de energía del viento. En la región III se debe tener una potencia
constante y cuidar la integridad de la turbina de cargas estructurales cuando las velocidades del viento
rebasen la de corte (Velocidad a la cual la integridad del aerogenerador está en peligro y debe
apagarse) [8].
El sistema de control está dividido en tres niveles de jerarquía en orden descendente:
1. Control supervisor: Es el más alto nivel y está a cargo de los procedimientos de arranque y
paro de la turbina. También monitorea el estado de la turbina.
2. Control de la operación: Es el control a nivel de la turbina y se ocupa de cómo se logran los
objetivos de control específicos de la turbina en la operación de las regiones II y III.
3. Control de subsistemas: Este es responsable de varios mecanismos actuadores como el pitch
(ángulo de paso), yaw (ángulo de guiñada) y la unidad de control de torque del generador.
Si las condiciones de viento son adecuadas para operar la turbina, el control operativo envía señales
de control al actuador de yaw de la góndola, de pitch y de torque del generador. El controlador
supervisor continúa monitoreando, y detiene la turbina, si una falla es detectada. La Figura 1.13 [5]
muestra un ejemplo del algoritmo de control operacional de una turbina de dos palas de 600 W. Las
mediciones de la velocidad de viento se realizan en un punto y solamente es una parte de la
información del perfil espacial de la velocidad del viento de entrada.

Capítulo 1
28
Figura 1.13. Control supervisor de la turbina de viento. (Pao,L.Y. & Jhonson, K.E. (2011), Control of Wind Turbines: Approaches, challenges and recent developments)
En la Figura 1.14 [8] se muestra una curva velocidad-potencia de operación ideal que se divide
típicamente en tres regiones de operación:
Región I (cut in). Velocidades de viento por debajo de la velocidad nominal (se obtiene durante
las pruebas de diseño estructural del aerogenerador). Se conoce también como velocidad de
encendido.
Región II (rated). Velocidades de viento cerca de la velocidad nominal; aquí el aerogenerador
debe producir la máxima potencia.
Región III (cut out). Velocidades de viento superiores a la nominal; aquí la integridad de las
partes mecánicas y de la estructura en general pueden dañarse por las altas cargas
aerodinámicas y las vibraciones producidas en las palas del aerogenerador. En ésta región se
debe reducir la velocidad de giro del rotor para aliviar las cargas. Se conoce como velocidad
de corte.

Capítulo 1
29
La potencia del aerogenerador crece conforme aumenta el viento incidente, entre las velocidades de
encendido y nominal. Cuando se llega a la región III debe permanecer constante la potencia hasta
llegar a velocidades de viento relativamente altas para el diseño (velocidad de corte) donde se apaga
la turbina [6].
Figura 1.14. Curva típica de potencia de un aerogenerador de velocidad variable. Adaptada de Njiri, J. y Soffker, D. (2015), State-of-Art in Wind Turbine Control: Trends and Challenges.

Capítulo 2
30
Para lograr los dos objetivos de la región II y III, asociadas a la máxima eficiencia y la regulación de
potencia, la mayoría de las turbinas eólicas instaladas, utilizan dos controladores: de pitch y de torque
del generador (Figura 2.1) [8]:
Figura 2.1. Esquema de control típico en turbinas eólicas. (Njiri, J. y Soffker, D. (2015), State-of-Art in Wind Turbine Control: Trends and Challenges).
La velocidad del rotor (), es la única variable certera, utilizada como entrada en los subsistemas de
control de pitch y torque. Dado que la velocidad del rotor está matemáticamente relacionada con otros
parámetros físicos importantes para el control, es útil para determinar los valores de pitch y torque
necesarios, para cumplir con los objetivos de control establecidos, para una cierta región de operación.

Capítulo 2
31
Para velocidades de viento en la región II, el controlador de torque es usado para maximizar potencia
o máxima eficiencia Cpmax (, ). El valor de ángulo de paso requerido es el óptimo (=opt) y una
valor constante de la velocidad de punta óptima opt donde,
𝜏𝑔 = 𝐾𝛺2 (2.1)
𝐾 = 1
2 𝑅5
𝐶𝑝𝑚𝑎𝑥(𝑜𝑝𝑡, 𝑜𝑝𝑡)
3 (2.2)
En estado estable o en equilibrio, el torque del generador se balancea con el torque aerodinámico del
rotor. En el caso de desequilibrio, el rotor se acelera o desacelera para mantener una constante opt,
para máxima eficiencia. Este método de control es popular y simple para implementar [17]. No hay
un método exacto para determinar 𝐾𝑇, pero se puede aproximar numérica o experimentalmente. Se ha
observado que cuando la velocidad del rotor sigue estrictamente la velocidad del viento para mantener
opt, en la región II, se inducen muy altos esfuerzos en la transmisión, debido a la variación del torque.
También puede causar excitación severa en modos de vibración pobremente amortiguados en la
turbina.
En la región III, se debe regular la potencia a la potencia nominal, así como también limitar las cargas
estructurales para evitar sobrepasar los límites mecánicos y eléctricos. En un sistema de control típico,
esto se logra manteniendo el torque del generador constante, mientras que el control de pitch colectivo
regula la velocidad del rotor al valor nominal.
Dentro de los sistemas de control pitch clásico, el esquema de control más utilizado es el integral-
derivativo. El control de ángulo pitch en el dominio del tiempo (t) es:

Capítulo 2
32
𝑐(𝑡) = 𝐾𝑝 𝑒 + 𝐾𝑖∫ 𝑒()
𝑡
0
𝑑 (2.3)
Donde e,= ref - , es el error de la velocidad del rotor, donde ref = Velocidad deseada u objetivo.
𝐾𝑝 𝑦 𝐾𝑖 Son las constantes de control proporcional e integral, respectivamente.
En la mayoría de los casos, es un controlador PI de ganancias programadas, que se emplea para
enfrentarse a las no linealidades del sistema y a la desviación de los puntos de operación respecto al
de diseño y ajuste de ganancias de un controlador de ganancias fijas.
Una de las principales desventajas de este método de control es que se asume que todas las palas
tienen propiedades físicas similares y están sujetas a las mismas cargas aerodinámicas durante la
operación y esto es un caso poco frecuente. Como consecuencia el rotor está sujeto a cargas
desbalanceadas las cuales causan esfuerzos inducidos que podrían llevar a una falla eventual.
Debido a la naturaleza impredecible del viento, frecuentemente la velocidad del viento pasa de la
región II a III y viceversa, y el daño estructural máximo ocurre en esta transición, debido a las cargas
de fatiga extremas. La conmutación entre controladores, de región II a la región II (recordando que se
utiliza un control de torque en la región II y uno de pitch en la región III), contribuye al problema [7].
La Figura 2.2 [5] muestra como se incrementan las cargas dinámicas por la variación abrupta del
viento en cuestión de segundos.
Otro problema asociado al controlador pitch y exclusivo para grandes turbinas eólicas, es que la baja
respuesta dinámica del actuador de pitch debido a las masivas fuerzas inerciales de las palas de gran
tamaño [8].

Capítulo 2
33
Figura 2.2. Transición pobre de la turbina CART entre las regiones II y III. . (Pao,L.Y. & Jhonson, K.E. (2011), Control of Wind Turbines: Approaches, challenges and recent developments)
Debido a la problemática encontrada, se buscan alternativas de para realizar palas más ligeras, además
deben presentar la característica de flexibilidad en la operación a través de sistemas de control, para
garantizar la integridad estructural.
En Lara [9], 2017, se menciona:
“Para lograr un control de cargas se ha puesto en práctica diferentes métodos de control (Figura 2.3).
Los sistemas de control pueden ser clasificados como controles activos (uso de actuadores) y controles
pasivos [10].

Capítulo 2
34
Figura 2.3. Sistemas de control de cargas aerodinámicas. Adaptada de Kade, W. I. (2012). Aerodynamic Design of Wind turbine Blades Utilising non Conventional Control Systems.
Como una de las técnicas de control de cargas se encuentran los microtabs. Este sistema se basa en el
concepto de gurney flap introducido por Liebeck [11] en el año de 1978. Gurney flap es un elemento
colocado el borde de salida, este elemento es fijo y no puede retraerse, su ubicación puede ser en la
superficie de presión como en la superficie de succión de un perfil aerodinámico. Liebeck observó
que al colocar gurney flaps en la superficie de presión, el coeficiente de sustentación CL se incrementó,
además de observar que si el gurney flap superaba el tamaño de altura de 0.02c (c es la cuerda del
perfil aerodinámico) el incremento del coeficiente de arrastre (CD) se incrementaba en gran
proporción, lo cual lo llevo a concluir que la altura óptima para Gurney flap se encontraba entre 0.01c
a 0.02c [12].
Técnicas avanzadas
Sistema de control
pasivo
Sistemas de control
activo
- Bend twist Adaptive blade
- Stretch Twist Adaptive Blade
Rotor Pala
Telescope blade
- Camber Control
- Aileron - Trailing Edge flap
- Microtabs - Twisting
- Individual pitch ctrl

Capítulo 2
35
El desarrollo inicial del concepto Microtab fue realizado por investigadores de la UC Davis a finales
de los 90s. Van Dam [13] , [14], hizo estudios experimentales y computacionales sobre Microtabs en
la superficie inferior de un perfil aerodinámico GU25-5 (11) [15]. Los efectos de la altura de los tabs,
la ubicación y el espaciamiento fueron investigados para aplicaciones 3-D. Los resultados indicaron
que un tab de 1% c de altura, situada a 0.95C desde el borde de ataque del perfil en la superficie
inferior, proporciona la mejor relación entre levantamiento y arrastre. Para ambas pruebas numéricas
y experimentales, se observó un incremento del 30-50% en el coeficiente de levantamiento CL en la
región lineal y con la altura del tab de 0.01C.
Como sistema de control de cargas, los microtabs se despliegan en un movimiento deslizante, en casi
el 1% de la cuerda del perfil aerodinámico. Al comparar los microtabs con los flaps (que cumplen una
función de control de cargas), los flaps utilizan del 20% al 30% de la cuerda en un movimiento
rotacional. Los flaps son elementos de mayor tamaño y costo. Microtabs ofrece una gran ventaja
respecto a otros sistemas de control de cargas, debido al bajo consumo de energía de operación.
Adicionalmente, el proceso de manufactura de la pala con microtabs, puede ser el convencional [15]”.
Figura 2.4. Control de cargas rotacional (Flap) y control de carga deslizante (Microtab). (Yen, D. et. Al. (2003), Computational Design and Analysis of a Microtab Based on AeroDynamic Loads Control
System for Lifting Surfaces.

Capítulo 2
36
La demanda energética mundial ha provocado un marcado incremento de la capacidad mundial
instalada de AG. Esto ha llevado a un incremento en el diámetro de los rotores lo cual provoca mayores
cargas aerodinámicas y momentos inerciales sobre la estructura del AG. Debido a lo anterior existe
un gran interés en el estudio de los dispositivos de control activo de carga así como de sus respectivas
estrategias de control que brinden la reducción de cargas buscada. Así como existe el interés de su
estudio, surge la necesidad de realizar modelos matemáticos y simulaciones que ayuden a reproducir
con fidelidad el efecto de estos dispositivos.
Mientras que para diseñar un controlador generalmente se hace uso de un modelo simplificado del
proceso a controlar, un modelo lo mas cercano a la realidad, es de gran utilidad para poder evaluar el
desempeño de un controlador al considerar un mayor nivel de detalle de la dinámica y esfuerzos del
AG. Por esto, es importante utilizar herramientas que sean apropiadas para realizar los casos de estudio
para lo antes mencionado.
FAST (Por sus siglas en inglés Fatigue, Aerodynamics, Structures and Turbulence) es una de esas
herramientas y de los códigos de simulación más utilizados mundialmente. El desarrollo del
conocimiento y dominio de FAST permitirá modelar y simular controladores de pitch y torque en un
AG de eje horizontal de 1.5 MW. Este proyecto generará conocimiento de la modificación del código
de FAST para la implementación de un algoritmo de control de microtabs, que actuará como sistema
auxiliar al control de pitch en el control de cargas aerodinámicas que se encuentran en frecuencias
superiores a la reacción del actuador de pitch. El algoritmo combinado permitirá realizar estudios
preliminares sobre la influencia de los dispositivos de control de carga, en base a simulaciones
realizadas con el código modificado de FAST.
Además, el presente trabajo constituye una aportación al proyecto P03 dentro del grupo de proyectos
del Centro Mexicano de Energía Eólica (CEMIE). El proyecto se denominó “Diseño de rotores para
aerogeneradores de eje horizontal, con incorporación de una de tres opciones de innovación
aerolástica, incluyendo construcción y prueba de una sección”.

Capítulo 2
37
La implementación de un sistema de control activo de carga basado en microtabs, ayudará a reducir
los valores pico del momento de flexión generado en la punta de las palas del AG. Este será un sistema
complementario al control de pitch, y actuará en velocidades de viento dentro de una banda de
frecuencias que no pueden ser compensadas por el actuador de pitch, debido a sus limitaciones
dinámicas naturales.
Proponer un algoritmo de control de pitch para un aerogenerador de 1.5 MW, auxiliado por un
algoritmo control de microtab, en la región de transición II a III y en la región III, para la reducción
del momento de flexión en la punta de las palas, generado perfiles de viento con frecuencias superiores
a la del actuador de pitch.
a) Estudiar y documentar los algoritmos de control pitch clásicos utilizados en turbinas eólicas.
b) Estudiar y documentar los dispositivos de control activo de carga encontrados en la literatura.
c) Modelar aerogenerador en el software FAST.
d) Crear interfaz de simulación entre el modelo creado en FAST y Simulink.
e) Mejorar la respuesta simulada en la carga de empuje sobre las palas, proponiendo un algoritmo
de control pitch-microtab en un aerogenerador de 1.5 MW, mediante el modelo creado en
FAST/Simulink.

Capítulo 2
38
A continuación se describen los pasos que se siguieron para el desarrollo del proyecto:
1. Obtención de conocimiento sobre funcionamiento de aerogeneradores.
2. Aprendizaje de teoría aerodinámica básica para la comprensión del sistema.
3. Obtención de conocimiento sobre los sistemas de control requeridos en la operación normal
de un AG.
4. Visualización de metodologías de modelado de AG; modelos simples hasta complejos.
5. Comprensión del funcionamiento de los microtabs
6. Comprensión de metodologías de modelado de microtabs.
7. Visualización de softwares o códigos de simulación que modelen AG incluyendo microtabs.
8. Aprendizaje experto en el uso del código FAST
9. Selección de un modelo de AG para realización de las pruebas.
10. Comprensión de metodologías de diseño de controladores utilizando FAST.
11. Selección de un modelo de generador eléctrico adecuado para el AG a ser probado.
12. Diseño de parámetros para la simulación de un control de torque.
13. Implementación de un control de torque para la región II.
14. Diseño de parámetros para la simulación de la región II ½.
15. Diseño de parámetros para la simulación de un control de pitch PI clásico.
16. Implementación de un control de pitch PI clásico para la región III.
17. Diseño de parámetros para la simulación de un control de pitch PI con ganancias programadas.
18. Implementación de un control de pitch PI con ganancias programadas para la región III.
19. Investigación sobre la implementación de microtabs en el código fuente de FAST.
20. Modificación del código fuente (FORTRAN) de FAST para habilitar las entradas de
microtabs.
21. Validación de actuación de microtabs, mediante la simulación en SIMULINK y FAST.
22. Implementación de un algoritmo de control simple ON-OFF para microtabs.
23. Análisis comparativo de resultados
24. Generar conclusiones

Capítulo 3
39
La energía eólica ha tenido un crecimiento substancial en las últimas décadas, debido a la demanda
energética mundial y la necesidad de fuentes de energía renovables. Esto también trajo un aumento
en el tamaño y la capacidad de producción de los AG. En el pasado los AG utilizaban controles simples
por pérdida o de velocidad fija, conectados directamente a un generador de inducción. Convertidores
de potencia, controles modernos y el estudio de la aeroelasticidad (interacciones entre fuerzas
inerciales, elásticas y aerodinámicas que ocurren cuando un cuerpo elástico se expone al flujo de un
fluido), y la disponibilidad de rápidos microprocesadores para el cálculo, han ayudado a los ingenieros
a diseñar modernos y sofisticados AG, capaces de entregar potencia de calidad, mientras se mejora el
tiempo de operación de los sistemas de potencia [16].
En la actualidad, existen programas de simulación avanzada que permiten predecir el comportamiento
de un AG real, con la flexibilidad de configurar el grado de complejidad del modelo. Utilizar un
software de modelado en vez de crear las matrices de dinámica manualmente tiene como ventaja el
ahorro de tiempo y una mayor confiabilidad en los resultados de los cálculos. Varias herramientas de
simulación tales como FAST, FOCUS, HAWC, Bladed, entre otras, se encuentran disponibles para
diseñar, desde pruebas estructurales y vibración, hasta sistemas de control robustos.
Murray et al. [17], en 2005 realizó experimentación con microtabs, modelando propiedades
aerodinámicas validando en un túnel de viento. Propuso un sistema de control con una banda inactiva
(deathband), donde la retroalimentación era el valor de fuerza de sustentación en el tiempo. El punto
de operación se obtuvo con el promedio de las mediciones de sustentación cada 2.5 segundos, y se
actualiza a una velocidad de 20 Hz. El error se obtenía de la diferencia del valor de sustentación actual

Capítulo 3
40
menos el punto de operación en ese momento. Si el error supera un delta determinado, se envía la
señal de activación de los microtabs.
Barlas [18] en 2011 realizó simulaciones con Trailing Edge Flaps (TEF) implementados en el AG de
5MW de NREL utilizando GH Bladed. Llamó “Smart Rotor” al sistema de TEF encargado de aleviar
cargas aerodinámicas de manera activa. Adicionalmente utilizó la herramienta numérica DU_SWAMP
(Creada por la Universidad Tecnológica de Deft) para el modelado aero-servo-elástico. Modeló el
microtab en el AG utilizando el simulador WTAC.
Li y Balas [19] en 2013 realizaron simulaciones de microtabs utilizando el modelo de Beddoes-
Leishman, dentro de la plataforma de Simulink. Implementaron esto a la región II y III de operación
junto con un control de pitch adaptable.
En el 2013, Macquart et al. [20], realizó un modelo dinámico del microtab, para caracterizar la
influencia que tiene sobre el perfil aerodinámico al momento de su despliegue. El modelo desarrollado
predice los coeficientes aerodinámicos transitorios. Después en 2014, Macquart [21] investigó sobre
el comportamiento de activación de microtabs con varios esquemas de control (modo deslizantes, on-
off, LQR y PID), utilizando como base el modelo del AG de 1.5 MW de NREL. Demuestra el
desarrollo de un modelo Aero-estructural, para incluir los microtabs en el modelo del AG.
Berit [22] en 2016 realizó experimentación en un túnel de viento, obteniendo un modelo teórico,
alimentado por los datos experimentales, así como simulaciones en CFD para simulación de flujo de
aire en el perfil aerodinámico. En extensión, su trabajo presenta un modelo analítico exacto basado en
la literatura, que resulta efectivo pero complejo en implementación. Adicionalmente muestra un
estudio de la respuesta de actuación o despliegue del microtab. Utiliza un modelo de viento IEC
61400. Posteriormente, en 2017, Fernández-Gamiz et al. [7], llevó a cabo una parametrización de un
microtab montado en un perfil de la turbina de 5MW diseñada por NREL. Posteriormente estudió la
influencia del microtab en la potencia de salida de un AG, realizando los cálculos del modelo mediante
el método BEM. Utiliza IEC 61400 como modelo de viento, generado en TurbSim.

Capítulo 4
41
Un aerogenerador es un sistema altamente no lineal en su dinámica y contiene varios grados de
libertad. El modelado de la turbina es conocimiento básico sobre la interacción entre las variables de
un sistema para una respuesta dinámica dada. La complejidad de relación entre las variables o
modelado dependerá de los objetivos de control que se planteen y las variables de control que se
tengan. Un modelo demasiado sencillo podría perder fidelidad mientras que un modelo demasiado
complejo podría dificultar el diseño de un controlador siendo posible que se tomen en cuenta variables
despreciables en un caso determinado. Lo ideal es elegir un modelo que se acople a las necesidades y
objetivos de control del sistema.
Un modelo simplificado suficientemente aproximado y muy utilizado hoy en día para la
implementación de controles convencionales de una entrada-una salida (SISO) y controles
multivariables (MIMO) es el que muestra Boukhezzar [26]. Este toma en cuenta el rotor, la caja de
transmisión y el generador (Figura 33). Consiste en dos masas separadas por una caja de trasmisión,
donde la flecha de la masa que precede a la transmisión es llamada la parte de baja velocidad, mientras
que la flecha que va después de la caja es llamada parte de alta velocidad. En la parte de velocidad
baja (con mayor torque) se encuentra la masa del rotor y en la de alta velocidad la del generador. La
potencia aerodinámica capturada por el rotor está dada por la expresión,
𝑃𝑎 =1
2𝜌𝜋𝑅2𝐶𝑃(𝜆, 𝛽)𝑉
3 (4.1)
La potencia aerodinámica está relacionada con el torque generado en el rotor por la relación

Capítulo 4
42
𝑃𝑎 = 𝛺𝑟𝑇𝑎 (4.2)
En donde el torque aerodinámico 𝑇𝑎 está dado por,
𝑇𝑎 =1
2𝜌𝜋𝑅3𝐶𝑡(𝜆, 𝛽)𝑣
2 (4.3)
En donde
𝐶𝑡(𝜆, 𝛽) =𝐶𝑃(𝜆, 𝛽)
𝜆 (4.4)
Las gráficas de las superficies de los coeficientes de torque y de potencia se obtienen utilizando el
método BEM; en [23] fue utilizado el código WT-PERF desarrollado por NREL para obtención de
dichas superficies. En la Figura 4.1 se observan las superficies de los coeficientes para la turbina de
prueba CART desarrollada por NREL. Estos valores de coeficientes son insertados como tablas de
búsqueda para la implementación dentro del modelo. La Figura 4.2 el diagrama de cuerpo libre de dos
masas.
El torque aerodinámico (𝑇𝑎) es frenado por el torque en la flecha de baja velocidad (𝑇𝒍𝒔) representado
por un sistema masa-resorte y un amortiguador (Kr) en la parte del rotor. Estas relaciones quedan
representadas en las ecuaciones 4.5 y 4.6.

Capítulo 4
43
Figura 4.1. Superficies de los coeficientes de potencia y torque para la turbina CART. (Boukhezzar,B. et. Al. (2006), Multivariable Control Strategy for Variable Speed Variable pitch Wind Turbines).
Figura 4.2. Modelo de 2 masas de un aerogenerador. (Boukhezzar,B. et. Al. (2006), Multivariable Control Strategy for Variable Speed Variable pitch Wind Turbines).

Capítulo 4
44
𝐽𝑟�̇�𝑟 = 𝑇𝑎 − 𝑇𝑙𝑠 − 𝐾𝑟𝑇𝑟 (4.5)
Donde,
𝑇𝑙𝑠 = 𝐵𝑙𝑠(𝜃𝑟 − 𝜃𝑙𝑠) + 𝐾𝑙𝑠(𝛺𝑟 − 𝛺𝑙𝑠) (4.6)
En el lado de alta velocidad, el generador es impulsado por la flecha conectada a la transmisión
produciendo un torque 𝑇𝐻𝑆. Este torque es frenado por el amortiguador conectado al generador Kg y
al par electromagnético del generador Tem. La ecuación 5.7 muestra la relación de torques del lado de
alta velocidad.
Tomando en cuenta la relación de engranes ng, se crea un modelo de una sola masa transfiriendo la
dinámica del generador al lado de baja velocidad. Con esto, asumiendo que el lado de baja velocidad
es una flecha perfecta rígida, se puede tener un modelo de una sola masa dado por la ecuación 5.8 y
representado en la Figura 4.3.
𝑛𝑔 =𝑇𝑙𝑠𝑇ℎ𝑠
=𝜔𝑔
𝜔𝑙𝑠 (4.7)
𝐽𝑡�̇�𝑟 = 𝑇𝑎 − 𝑇𝑔 − 𝐾𝑡𝜔𝑟 (4.8)
𝐽𝑡 = 𝐽𝑟 + 𝑛𝑔2𝐽𝑔 (4.9)
𝐾𝑡 = 𝐾𝑟 + 𝑛𝑔2𝐾𝑔 (4.10)
𝑇𝑔 = 𝑛𝑔2𝑇𝑒𝑚 (4.11)

Capítulo 4
45
Figura 4.3. Modelo reducido de una masa. (Boukhezzar,B. et. Al. (2006), Multivariable Control Strategy for Variable Speed Variable pitch Wind Turbines).
En el proyecto se optó por utilizar el software FAST (Fatigue, Aerodynamics, Structures and
Turbulence) creado por NREL en coordinación con la universidad de Oregon. FAST es un software
de código libre y certificado a nivel mundial como medio muy preciso de simulación así como
herramienta de diseño confiable. En 2005, FAST en conjunto con dos subrutinas que contiene
(ADAMS y AeroDyn) fueron evaluadas por la organización Germanischer Lloyd WindEnergie y lo
calificaron como un software apto para el cálculo de cargas en turbinas con base en tierra (onshore)
para diseño y certificación [24].
Utilizar un software de modelado en vez de crear las matrices de dinámica manualmente tiene como
ventaja el ahorro de tiempo y una mayor confiabilidad en los resultados de los cálculos.
Adicionalmente, se puede enfocar mayor esfuerzo en el estudio del sistema como una planta dentro
del entorno MATLAB, ya que FAST posee una interfaz a SIMULINK mediante la generación de
código en C dentro de una S_Function. Esto ayuda a tener en un solo bloque el diseño la turbina
completa, el cual al momento de correr la simulación manda a llamar a la rutina de FAST que ejecuta
todas las ecuaciones de movimiento y los resultados de dichas ecuaciones pueden ser leídos en la

Capítulo 4
46
interfaz de SIMULINK o en el entorno de variables de MATLAB. En la Figura 4.4 se observa en un
bloque verde el modelo de la turbina obtenido de FAST. Se puede ver también que se tiene un bloque
para leer las entradas de torque del aerogenerador, de pitch y de yaw. Es aquí donde se muestra la
flexibilidad de implementar un controlador en la simulación.
Figura 4.4. Interfaz de FAST con Simulink.
En el software se pueden modelar turbinas de 2 o 3 palas con distintos grados de libertado (GDL). El
modelo relaciona 9 cuerpos rígidos (la tierra, la plataforma de soporte, el plato de base, la góndola, la
armadura, los engranes, el hub, la aleta y estructura de furling y el rotor) y 5 cuerpos flexibles (la torre,
las tres palas y la flecha que mueve el rotor). EL modelo de tres palas utiliza 24 GDL que relacionan
a los cuerpos flexibles y rígidos. Los primeros 6 grados de libertad corresponden a la traslación (surge,
sway y heave) y la rotación (roll, pitch y yaw) del marco inercial del soporte de la plataforma. Los
siguientes cuatro GDL son dos modos de movimiento lateral y dos modos de movimiento longitudinal
de la torre. El movimiento de yaw de la góndola provee otro GDL. Dos grados de libertad los proveen
el ángulo de azimut del generador y el acoplamiento existente entre el generador y el rotor. Los
siguientes 3 GDL son los del primer modo de flapwise para cada una de las palas. Otros 3 GDL

Capítulo 4
47
adicionales son los segundos modos de flapwise para cada una de las palas. 3 GDL más son para el
primer modo de desplazamiento en edgwise para cada pala. Los últimos dos GDL son para el
movimiento de furl del rotor y la aleta. Adicionalmente, es posible habilitar en el código los grados
de libertad necesarios para una simulación determinada.
Cada uno de los cuerpos que usa FAST para la representación en conjunto del aerogenerador cuenta
con un sistema de coordenadas. Los archivos de entrada y salida del modelo utilizan estas coordenadas
como referencia. En la Figura 4.5 se muestran los sistemas de coordenadas de cada cuerpo. La Figura
4.6 muestra de manera individual cómo es modelado el sistema de coordenadas de las palas, donde se
obtienen las deflexiones y aceleraciones de las mismas en un sistema que gira junto con el ángulo de
azimut de cada pala.
FAST v8-16.00a-bjj es la versión más reciente en el momento de las simulaciones y ha sido
desarrollado por NREL como una plataforma modular. Cada uno de los módulos contiene diferentes
dominios físicos creando un acoplamiento aero-hidro-servo-elástico en la solución. Contiene
configuración para modelado de aerogeneradores con plataforma en tierra (Onshore) y plataforma
flotante. En la Figura 4.7 [24] se muestra la configuración de los módulos que contienen la
información segmentada de todo el sistema. La conexión de la información de todos los módulos es
manipulada por un código principal de unión.
Una vez completado el proceso de diseño y caracterización de la turbina mediante los archivos de
FAST (desde la parte aerodinámica hasta la parte eléctrica) se procede a diseñar el controlador de
velocidad variable.

Capítulo 4
48
Figura 4.5. Sistemas de coordenadas. Recuperada de Jonkman y Buhl (2005), FAST User’s Guide.
Base de la torre Parte superior de la torre
Góndola Flecha del rotor
Hub Coordenadas cónicas

Capítulo 4
49
Figura 4.6. Sistemas de coordenadas de las palas. (Jonkman y Buhl (2005), FAST User’s Guide).
Figura 4.7. Módulos que componen a FAST. (Jonkman, B. y Jonkman J. (2016), README_FAST8).

Capítulo 4
50
Como ya se mencionó anteriormente, el control de la turbina se realiza dependiendo de la región de
operación en la que se encuentre, tomando en cuenta la cuerva de potencia-velocidad de viento. En
velocidades de viento por debajo de la velocidad nominal (región 2), el ángulo de pitch se mantiene
constante y el control de torque del generador regula la velocidad angular del rotor, con el objeto de
mantener un valor de λ constante; esto con la finalidad de “seguir” el Cp máximo, asegurando la
máxima captura de energía cinética del viento.
Con el aumento de la velocidad de viento por encima de la velocidad nominal (o de diseño), el AG
entra en la región 3 de operación. El torque del generador se mantiene constante en el valor de torque
nominal, mientras que el control de ángulo de paso (pitch) mantiene la velocidad angular del rotor
constante; esto lo hace variando la eficiencia del AG mediante la variación del ángulo β.
En el momento de pasar de la región 2 a la 3, se tiene un desfase entre la velocidad angular y el torque
nominales del generador. Esto produce que no se tenga la máxima potencia o eficiencia en el AG.
Para ello, se introduce una zona 2 ½, donde mediante una función lineal, el controlador de torque lleva
ocurrir simultáneamente los valores nominales de velocidad y torque. Dicha región inicia en una
velocidad de rotor Ω1 y llega hasta la velocidad nominal a la cual ocurre el torque nominal Ω2.
El modelo utilizado para el torque del generador en la región 2 es simple. Para mantener el valor
óptimo de λ en la región 2, el torque del generador debe variar proporcionalmente al cuadrado de la
velocidad del rotor como se menciona en [25].
𝑇𝑔 = 𝑘𝛺2 (4.12)
Donde,
𝑘 =1
2𝜌𝜋𝑅5
𝐶𝑝𝑚𝑎𝑥
( 𝜆𝑜𝑝𝑡)3 (4.13)

Capítulo 4
51
𝐶𝑝𝑚𝑎𝑥, 𝜆𝑜𝑝𝑡 𝑦 𝛽𝐶𝑝𝑚𝑎𝑥, representan los valores con los que el AG tiene la máxima eficiencia en la
región 2. Para conocerlos, se crea una gráfica de superficie de Cp (λ,β) y se obtienen los valores de
Cp, λ y β donde se tiene el máximo de la función de dos variables (Ver Figura 4.8).
Figura 4.8. Gráfica ejemplo de superficie Cp (λ,β). Recuperada de Wright, A.D. y Fingersh, L.J. Advanced Control Design for Wind Turbines Part I. (2008).
Una vez obtenidos los parámetros Cpmax, λopt y βmax se deben definir los valores de ρ, R, Ngear
(relación de engranaje), torque nominal y velocidad angular nominal. La variable Tg debe ser
expresada desde el lado de alta velocidad de la flecha del rotor y en unidades de radianes sobre
segundo, por ello se divide la constante k entre Ngear3 (relación de engranaje) multiplicado por
𝜋
30· 2
para convertir de revoluciones por minuto a radianes por segundo.
La variable Tg se utiliza dentro de la región 2, simulando una función de tipo cuadrática con una
constante de valor k y variante en función de la velocidad angular del rotor. Adicionalmente, se sabe
que es deseable que el torque nominal y la velocidad nominal del rotor sucedan de manera simultánea

Capítulo 4
52
para que exista una extracción mayor de energía. Es aquí donde se inserta la región llamada 2 1/2
proporcional a la velocidad angular del rotor. Dicha región inicia en una velocidad Ω1, hasta una
velocidad ligeramente menor a la velocidad en la que se alcanza el torque nominal, denominada Ω2.
Por lo tanto, Tg dentro de esta región se expresa como:
𝑇𝑔(𝛺) = 𝑇1 + (𝑇𝑟𝑡 − 𝑇1𝛺2 − 𝛺1
) (𝛺 − 𝛺1) (4.14)
Donde,
Ω = Velocidad angular del rotor Ω1 = Velocidad angular del rotor al inicio de R2 1/2 Ω2 = Velocidad angular del rotor a la cual se alcanza Trt T1 = Torque del rotor en Ω1 Trt = Velocidad angular del rotor al inicio de R2 rt/2
En la Figura 4.9 se observa a detalle la región 2 ½ , tomando como ejemplo parámetros de la turbina
bipala CART desarrollada por NREL. Cabe mencionar que una vez que se rebasa la velocidad
nominal, el torque del generador se determina igual al torque nominal Qrated (Trt).

Capítulo 4
53
Figura 4.9. Función Tg (Ω) de la región 2 ½ de operación. (Wright, A.D. y Fingersh, L.J. (2008), Advanced Control Design for Wind Turbines. Part I: Control Design, Implementation and Initial Tests).
Para utilizar éste método de simulación, se requiere del modelo simple del generador de velocidad
variable configurable en el archivo de entrada de FAST llamado Servodyn. Dentro del código
contenido en éste archivo se puede encontrar el apartado de modelo de velocidad variable simple. En
él, es requerida la configuración de cuatro parámetros o variables para una simulación de las regiones
2 y 2 ½ mostradas en el apartado anterior. La Tabla 4.1 muestra las líneas de código necesarias para
dicha configuración.

Capítulo 4
54
Tabla 4.1. Descripción detallada de los parámetros a utilizar en Servodyn.
Variable Descripción
VSContrl Modo de control. 0: Ninguno, 1: Simple, 2: definido por el usuario, 3: Simulink
VS_RtGnSp Velocidad angular nominal del generador. Utilizado cuando VSContrl=1.
Vs_RtTq Torque nominal del generador/ Torque constante en la región 3.
VS_Rgn2K Constante de torque k utilizada en la región 2
VS_SlPc Porcentaje de deslizamiento del generador en la región 2 ½.
De la tabla anterior, la variable VS_SlPc es la que falta por calcular. Para ello, se tomará como apoyo
la ecuación 4.14 y el modelo del generador de inducción simple descrito en [24] (ecuación 4.15). Del
modelo de inducción se reemplaza la variable SIG_SLPc con VS_SlPc:
𝛺2 = 𝑆𝐼𝐺_𝑆𝑦𝑠𝑃 (1 + 0.01𝑉𝑆_𝑆𝑙𝑃𝑐) (4.15)
Donde,
SIG_SySp = Velocidad de sincronía del generador
VS_SlPc = Porcentaje nominal de deslizamiento del generador
Dado que SIG_SySp es la velocidad de sincronía o cero torque, se puede obtener igualando la ecuación
4.16 a cero, y despejar el valor de Ω:
0 = 𝑇1 + 𝑇𝑟𝑎𝑡𝑒𝑑 − 𝑇1𝛺2 − 𝛺1
(𝛺 − 𝛺1) (4.16)

Capítulo 4
55
𝑆𝐼𝐺_𝑆𝑦𝑆𝑝 = 𝛺 = 𝛺1 − (𝛺2−𝛺1
𝑇𝑟𝑎𝑡𝑒𝑑−𝑇1)𝑇1 (4.17)
Sustituyendo luego,
𝑉𝑆_𝑆𝑙𝑃𝑐 = 100 ∗ (𝛺2
𝑆𝐼𝐺_𝑆𝑦𝑆𝑝− 1) (4.18)
El objetivo del control pitch simple es regular la velocidad del rotor a un punto dado en la región III.
Para esta región se mantiene constante el torque del generador y se usa la variación del ángulo pitch
para control de velocidad. Un modelo lineal teniendo como único grado de libertad a la velocidad
angular del rotor es suficiente, para diseñar un control simple en la región III, teniendo la forma:
∆�̇� = 𝐴∆𝛺 + 𝐵∆𝛽 + 𝐵𝑑∆𝑉 (4.19)
𝐴 =𝛾
𝐼𝑟𝑜𝑡 𝛾 =
𝜕𝑇𝑎𝜕𝛺
𝐵 =𝜉
𝐼𝑟𝑜𝑡 𝜉 =
𝜕𝑇𝑎𝜕𝛽
𝐵𝑑 =𝛼
𝐼𝑟𝑜𝑡 𝛼 =
𝜕𝑇𝑎𝜕𝑉
La ecuación 4.19 está descrita en términos de los valores perturbados de estas variables. Estas
perturbaciones se asume que son pequeñas con respecto a los puntos de equilibrio de los valores en
estado estable. Dicho sistema lineal se utiliza como base para el diseño de controladores clásicos,
como el PID o PI. La expresión de un control PID estándar viene dada por:

Capítulo 4
56
∆𝛽 = 𝐾𝑝∆𝛺(𝑡) + 𝐾𝑖∫∆𝛺(𝑡)𝑑𝑡 + 𝐾𝑑∆�̇�(𝑡) (4.20)
Para efectos del análisis de estabilidad del sistema y seleccionar las ganancias adecuadas para lograr
la respuesta deseada, se obtiene la función de transferencia transformando del dominio del tiempo a
Laplace las ecuaciones 4.19 y 4.20, para después sustituir el valor de β en el modelo lineal de 1 grado
de libertad (ecuación 4.19). Con ello se obtiene:
𝑇(𝑠) =∆𝛺(𝑠)
∆𝑉(𝑠)=
𝐵𝑑𝑠
(1 − 𝐵𝐾𝐷)𝑠2 + (−𝐴 − 𝐵𝐾𝑝)𝑠 + (−𝐵𝐾𝑖) (4.21)
De la ecuación 4.21 se pueden analizar los polos de la función de transferencia. Se observa que la
estabilidad del sistema depende de las ganancias y de las matrices del modelo lineal. Todos los valores
deben estar en el lado izquierdo del plano complejo (las raíces deben poseer partes reales negativas).
Se llega a la ecuación general de segundo orden del denominador, para el análisis de los factores de
amortiguamiento, frecuencia natural y la frecuencia no amortiguada.
NREL basado en el sistema lineal obtenido de FAST, muestra la obtención del denominador de
segundo orden mediante las matrices A, B y C. (Ecuaciones 4.22, 4.23, 4.24).
𝑠2 + 2𝛿𝜔𝑠 + 𝜔2 = 0 (4.22)
2𝛿𝜔 =−𝐴 − 𝐵𝐾𝑃1 − 𝐵𝐾𝐷
(4.23)

Capítulo 4
57
𝜔2 = −𝐵𝐾𝑖
(1 − 𝐵𝐾𝐷) (4.24)
Resolviendo para Ki y Kp,
𝐾𝑖 =−𝜔2(1 − 𝐵𝐾𝐷)
𝐵, (4.25)
𝐾𝑝 = −𝐴
𝐵−2𝛿𝜔(1 − 𝐵𝐾𝐷)
𝐵 (4.26)
Las raíces de 4.22 están dadas por 𝑠 = −𝛿𝜔 ± 𝜔√𝛿2 − 1. Con éstas raíces y el valor de las ganancias,
se pueden determinar los siguientes casos:
- Sub-amortiguado: Cuando 𝛿 < 1 se tienen dos raíces complejas conjugadas 𝑠 = −𝛿𝜔 ± 𝑗𝜔𝑑,
donde 𝜔𝑑 = 𝜔√1 − 𝛿2.
- Críticamente amortiguado: Cuando 𝛿 = 1 se tienen dos raíces repetidas 𝑠 = −𝜔 ± 𝑗0.
- Sobre-amortiguado: Cuando 𝛿 > 1 se tienen dos raíces reales 𝑠 = −𝛿𝜔 ± 𝜔√𝛿2 − 1.
El diseño de un control clásico como el que se mostró en el apartado anterior tiene como ventaja el
requerir una sola variable de entrada para la compensación, al igual de ser sencillo de implementar.
Por otra parte, se debe recordar que un AG es un sistema con una gran cantidad de grados de libertad
y relaciones altamente no lineales entre variables. Esto dice que el control PI clásico, en variaciones
de viento en la región III, no tendrá una respuesta homogénea. La Figura 4.10 [25] representa el
desempeño del controlador cerca de la región de transición II y III (Caso 1), y en mediaciones de la
región III (caso 4). Se puede observar que las respuestas difieren notablemente.

Capítulo 4
58
Figura 4.10. Desempeño del control clásico a diferentes puntos de operación. (Wright, A.D. y Fingersh, L.J. (2008), Advanced Control Design for Wind Turbines. Part I: Control Design,
Implementation and Initial Tests).
El cambio en el desempeño se debe a la variación de las entradas β y V. La ganancia de control de la
entrada B, se relaciona de manera directa con la derivada parcial del torque aerodinámico respecto al
ángulo de pitch (𝜕𝑇𝑎
𝜕𝛽). En la Figura 4.11 se muestra Ta para diferentes ángulos de pitch y velocidades
de viento.
La pendiente de las curvas se refiere a la ganancia de la entrada de control. La pendiente varía en
función del ángulo β. Las ganancias son pequeñas para ángulos de pitch pequeños, en donde la turbina
se encuentra en la transición de la región II y III. Las ganancias se incrementan conforme aumenta el
ángulo de pitch (las pendientes son negativas. El diseñar un controlador con ganancias fijas para un
punto de operación específico, presentará un desempeño diferente para otro punto de operación,
debido a ésta variación en la ganancia de la matriz B.

Capítulo 4
59
Figura 4.11. Variación de las ganancias de entradas de control respecto al ángulo pitch. (Wright, A.D. y Fingersh, L.J. (2008), Advanced Control Design for Wind Turbines. Part I: Control Design,
Implementation and Initial Tests).
Para resolver éste problema se proponen “programar” las ganancias del controlador, implementando
una ganancia de compensación cuando el punto de operación sea dinámico.
𝐺𝐾(𝛽) = 1
1 +𝛽𝐾𝐾
(4.27)
Donde β es el ángulo de pitch y KK es el ángulo de pitch escogido en la región 3, en base a la pendiente
de la matriz B (derivada parcial del torque aerodinámico). Inicialmente se debe diseñar el controlador
PI en un punto de operación cercano a la región II y III. Después, se deben realizar varias
linealizaciones del modelo no lineal, para obtener nuevos valores de las matrices A y B. El valore de
KK será el valor del ángulo β para el cual la matriz B llegó al doble de su valor inicial; esto es, el
doble del valor que se obtuvo en la linealización en el punto cercano a la región II y III. En la Figura
4.12 se muestra un diagrama a bloques en Simulink del controlador de ganancias programadas
implementado en la turbina CART de NREL. La función 𝑓(𝑢) contiene el valor de corrección para
“reprogramar” o ajustar las ganancias actuales con una simple multiplicación.

Capítulo 4
60
Figura 4.12. Diagrama a bloques del controlador con ganancias programadas. . (Wright, A.D. y Fingersh, L.J. (2008), Advanced Control Design for Wind Turbines. Part I: Control Design,
Implementation and Initial Tests).
En la Figura 4.13 se muestra la respuesta del sistema una vez implementado el control de ganancias
programadas. Los sobrepasos para diferentes puntos de operación son aproximadamente los mismos,
al igual que el tiempo de establecimiento.
Figura 4.13. Desempeño del control a diferentes puntos de operación. . (Wright, A.D. y Fingersh, L.J. (2008), Advanced Control Design for Wind Turbines. Part I: Control Design, Implementation and Initial
Tests).

Capítulo 5
61
En el siguiente capítulo se detallarán los pasos que se siguieron para la reducción en el momento de
flap del AG. El diseño de los controladores se basa en la experimentación realizada por NREL. Se
toma el modelo del AG WindPact de NREL de 1.5 MW para probar los controladores de torque, de
pitch y de microtabs. Debido a que la caracterización y obtención de curvas de respuesta mostrada por
Wright en [25] son de la turbina CART de dos palas, se deben obtener el mismo tipo de curvas para
el AG de 1.5 MW; esto será el paso previo al diseño de los controladores. La caracterización se
entiende como el conocimiento del comportamiento de un sistema ante ciertas variables de entrada,
mediante el análisis de las curvas de respuesta obtenidas por dichas entradas. El código original del
AG de 1.5 MW, no contempla un modelo de generador eléctrico; por ello, se tuvo que encontrar en la
bibliografía un modelo de generador con una potencia aproximada a 1.5 MW [26], e introducir la
información de las variables que pide el código de FAST para un modelo de circuito de Thevenin.
Una vez hecho esto, se obtiene el gráfico de 𝐶𝑝(𝛽, 𝜆) que describe el coeficiente de potencia con la
introducción del modelo del generador eléctrico; esto ayuda a obtener el punto de máxima potencia
extraída del viento.
Una vez caracterizado el AG, se procede a obtener los parámetros de los sistemas de control. En el
caso del control en la región II, se obtiene el valor de torque requerido para alcanzar el valor de Cpmax
en función de una constante K y el valor de la velocidad angular del rotor en ese momento. La variable
de salida del torque de generador calculada FAST, será el resultado del valor obtenido en esta función.
Para la región III, se obtiene el modelo lineal del AG, con el objetivo de diseñar un controlador PI
clásico para un punto de operación que se encuentre en las mediaciones de la región II y III. Éste
modelo lineal se obtiene solamente con un grado de libertad activo. Esto debido a que el control PI
solo es efectivo regulando la velocidad del rotor cuando se consideran rígidos todos los grados de
libertad, menos el del generador eléctrico. Adicionalmente, se ha estudiado que el sobrepaso en la

Capítulo 5
62
velocidad angular del rotor es variable en función de la velocidad de viento que se tenga en la entrada.
Para homogenizar la respuesta del control PI ante un intervalo de velocidades de viento, se diseña un
control de ganancias programadas. En el modelo lineal, la aceleración angular del rotor se encuentra
relacionada con la derivada parcial del torque aerodinámico respecto al ángulo de pitch; por ello se
programan las ganancias Kp y Ki en función del valor actual del ángulo pitch.
Hasta los pasos anteriores, se implementó en el modelo de FAST un sistema de control simple visto
en muchos AG de prueba. En la realidad, deben diseñarse sistemas de control más robustos, que
contemplen la interacción de más grados de libertad que los que se contemplan en este proyecto. Sin
embargo, se busca estudiar como ayudaría la implementación de los microtabs a mejorar el desempeño
de un sistema de control clásico, mediante la reducción de cargas sobre las palas. El modelado de
microtabs no viene como una opción en el código original de FAST, por lo que se realiza una
modificación en el código fuente para que el modelo matemático pueda contemplar la existencia de
estos dispositivos.
Con la modificación del código fuente, se habilita la opción de cambio de tablas aerodinámicas en los
perfiles, simulando la activación y desactivación de los microtabs; esta conmutación entre tablas es
comandada desde Simulink, enviando el valor de la tabla que se desea utilizar para el modelo de
FAST. Para determinar los valores de las tablas de coeficientes que simulan la presencia de microtabs,
se utilizaron resultados de un análisis experimental encontrado en la bibliografía y realizado por el
área de energías de CIDESI.

Capítulo 5
63
A continuación se muestra la obtención de características estructurales, eléctricas, elásticas y
aerodinámicas de un modelo de AG proporcionado por NREL. La idea principal es mostrar como
personalizar el código de FAST, para obtener un modelo completo del AG con el cual se trabajará
para diseñar e implementar posteriormente los sistemas de control.
Es importante mencionar, que en este apartado se realizan pruebas preliminares para demostrar el
dominio del código, comprobando que las respuestas obtenidas de las simulaciones concuerden con
la teoría y la revisión de literatura.
El AG para las simulaciones fue tomado del archivo de certificación de NREL, contenido en las
pruebas de FAST8. Básicamente la construcción de las palas, el material, eficiencia y comportamiento
de la turbina ya fue probado por NREL, por lo que se utilizará como modelo para implementación del
control en la región II y III [27]. En la Tabla 5.1 se muestran las características más importantes del
aerogenerador. La obtención de los últimos tres parámetros de la tabla se muestra en el siguiente
sección.
Tabla 5.1. Lista de parámetros para el AG de 1.5 MW diseñado por NREL.
Parámetro Valor Unidades
Potencia entregada 1500 kW Velocidad de viento nominal 12 m/s Velocidad angular nominal del rotor 20.5 RPM Velocidad angular nominal del generador 1800 RPM Torque nominal para la región 3 8376.58 N-m Relación de engranaje 87.965 - Diámetro del rotor 70 m Altura de la torre 82.39 m Cp max 0.51 - λ óptimo 7.5 - β óptimo (inicial) 2.5 °

Capítulo 5
64
La información de los parámetros es cargada en los archivos AeroDyn, ElastoDyn, ServoDn e
InflowWind; Test13B.fst es el archivo que conjunta todos estos archivos para completar el modelo del
AG de 1.5 MW.
Un mecanismo que juega un papel importante dentro del sistema de control es el generador eléctrico.
El generador se puede clasificar en distintos tipos, y además en distintas configuraciones. De esto
depende la producción energética del generador y el torque nominal que requiere para una potencia
de salida determinada.
FAST ofrece tres opciones para modelar el generador eléctrico:
1. Modelo simple
2. Modelo de Thevenin
3. Modelo creado por el usuario mediante la subrutina UserGen.
Como se menciona en [24], el modelo simple brinda una aproximación pobre al comportamiento real
del generador y sólo se utiliza para hacer pruebas simples de control. En cambio, el modelo del circuito
equivalente de Thevenin permite modelar las características dinámicas del circuito rotor-estator más
importantes y suficientes para simular el comportamiento real de un generador de inducción. Por
último, la subrutina UserGen, permite mediante el código fuente, realizar un modelo tan complejo o
tan simple como el usuario lo desee. Para la experimentación se utilizó el modelo de Thevenin. Dado
que en la bibliografía de NREL no se encontraron los parámetros del generador eléctrico de 1.5 MW,
se obtuvieron de un generador genérico mostrado en [26]. Antes de la operación a velocidad variable,
es necesario modelar la operación en velocidad fija con el motor de inducción. En la Figura 5.1 se
muestra el circuito de Thevenin de un generador de inducción que puede ser programado en el código
de FAST [16].

Capítulo 5
65
Figura 5.1. Circuito equivalente de Thevenin utilizado por FAST. Singh,M. et al. Simulation for Wind Turbine Generators- With FAST and MATLAB-Simulink Modules.
Tabla 5.2. Parámetros para la configuración del circuito de Thevenin dentro del código de FAST.
Variable Símbolo Unidad Descripción
TEC_Freq f Hz Frecuencia de línea eléctrica. 60 Hz para América y 50 Hz para Europa.
TEC_Npol - -
Número de polos en el generador. Éste valor debe ser un entero par mayor a 0, pero es ignorado si la variable GenModel no es igual a 2 o si la vriable VSContrl es diferente de 0
TEC_SRES R1 Ohms
Ésta es la resistencia del estator en el circuito completo. Éste valor debe ser mayor a 0, pero es ignorado si la variable GenModel no es igual a 2 o si la vriable VSContrl es diferente de 0
TEC_RRes R2 Ohms Ésta es la resistencia del rotor en el circuito completo.
TEC_VLL VLL Volts Voltaje línea-línea del generador. Éste valor debe ser mayor a 0 y comúnmente es de 690 en Europa y 480 o 575 en Estados Unidos.
TEC_SLR X1 Ohms Reactancia de fuga del estator en el circuito completo. Éste valor debe de ser mayor a 0.
TEC_RLR X2 Ohms Rectancia de fuga del rotor en el circuito completo. Éste valor debe ser mayor a 0.
TEC_MR Xm Ohms Reactancia de magnetización del circuito completo del generador.

Capítulo 5
66
Para iniciar con las pruebas de control en velocidad variable, primeramente se debe caracterizar el
comportamiento del coeficiente de potencia para varios ángulos pitch. En la Figura 5.2 se muestran
las curvas de Cp comparadas con el factor TSR para diferentes ángulos β. El procedimiento para
obtener la gráfica fue el siguiente:
1. Fijar un ángulo de pitch constante en ElastoDyn.
2. Desactivar todos los grados de libertad en ElastoDyn y sólo dejar activo el de tren de
transmisión.
3. Fijar una velocidad angular en ElastoDyn. Empíricamente se obtuvo que fijando la velocidad
en 20 rpm se tiene una mejor visualización de la curva (cerca de la velocidad nominal).
4. Ejecutar dentro del archivo InfloWind pasos de viento desde 5 hasta 18 m/s. Para ello se crea
un archivo que contiene una función de tiempo de prueba contra velocidad de viento.
5. Una vez terminada la prueba, se modifica el ángulo de pitch para obtener una nueva curva,
siguiendo los pasos del 1 al 4.
El punto máximo de eficiencia aerodinámica se encuentra en: 𝐶𝑝 = 0.51, 𝜆 = 7.5 𝑦 𝛽 = 2.5° (Ver
Figura 5.2). El perfil de viento debe ser en escalones de viento con dirección en x, sin turbulencias ni
perturbaciones en las direcciones Y y Z con respecto a la posición de la turbina. En el archivo de
entrada Inflowind se configura la opción de perfil de viento “WindType”=2. Ésta opción permite ligar
un archivo .wnd con la información de la velocidad de viento para cada instante de tiempo de
simulación. El archivo puede abrirse y modificarse mediante el bloc de notas de Windows.

Capítulo 5
67
Figura 5.2. Curvas de Cp-TSR (λ)-β. La línea roja punteada muestra el punto óptimo de eficiencia aerodinámica.
Como ya se explicó en el estado del arte, el control de velocidad en la región 2 tiene como objetivo
mantener el coeficiente de potencia en su punto máximo para un ángulo de pitch constante. Esto se
logra generando una curva cuadrática que tiene como variable independiente a la velocidad angular
del rotor y una constante K, con el fin de mantener el torque de la flecha en un valor en el cual el Cp
es el máximo. De las ecuaciones 4.12 a 4.18 se tiene que:
𝑄𝑔𝑒𝑛 = 𝑘𝛺2 = 0.001974813𝛺2, (5.1)
5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5
0.4
0.42
0.44
0.46
0.48
0.5
0.52
X: 7.506
Y: 0.5103
(tip speed ratio)
Cp
=0
=0.5
=1
=1.5
=2
=2.5
=3
=3.5
=4

Capítulo 5
68
dado que,
𝑘 =1
2𝜌𝜋𝑅5 𝐶𝑝𝑚𝑎𝑥
( 𝜆𝑜𝑝𝑡)3=
1
2(1.229)𝜋(35)5
0.51
(7.5)2= 0.001974813. (5.2)
La introducción de la región de transición es equivalente a decir que se obtendrá una pendiente entre
una velocidad ángular del rotor inicial (𝛺1) dentro de la región II y la velocidad angular en la región
III en la cual aproximadamente ocurre el torque nominal (𝛺2). Para el cálculo de la pendiente
requerida para lograr esto, primero debe calcularse el porcentaje de deslizamiento del generador
eléctrico; esto se hace determinando que se trabajará con un generador asíncrono. VS_SlPc es la
variable dentro del código de FAST que representa este valor. Éste proceso se encuentra documentado
en [25] y es mostrado gráficamente en la Figura 5.3.
Figura 5.3. Proceso de obtención del deslizamiento del generador eléctrico documentado por Wright.
Introducir valor de VS_SlPc en ServoDyn
Cálculo de SIG_SySP
Hacer Tg(Ω)= cero
Sustituir valores en ecuación 4.16 y
resolver para la velocidad del
generador
𝑉𝑆𝑆𝐿𝑃𝐶 = 100 × 𝛺2
𝑆𝐼𝐺𝑆𝑦𝑆𝑝− 1

Capítulo 5
69
Como resultado se obtienen los siguientes valores:
𝑆𝐼𝐺𝑆𝑦𝑆𝑝 = 𝛺 = 𝛺1 − (𝛺2−𝛺1
𝑇𝑟𝑎𝑡𝑒𝑑−𝑄1)𝑄1 = 1700 − (
1800−1700
8376.58−5707.2)5707.2 = 1486.19𝑅𝑃𝑀
𝑉𝑆_𝑆𝑙𝑃𝑐 = 100 ∗ 𝛺2
𝑆𝐼𝐺𝑆𝑦𝑆𝑝− 1 = 100 ∗ (
1800
1486.19− 1) = 21.11 %
Con estos valores se construye el código en el apartado de control de velocidad simple dentro del
archivo de entrada ServoDyn como se presenta en la Tabla 5.3. Valores calculados para los parámetros
de ServoDyn para el control de velocidad simple en la región 2.. Con estos valores se logra simular
un control de torque simple para la región II y la región de transición entre II y III.
Tabla 5.3. Valores calculados para los parámetros de ServoDyn para el control de velocidad simple en la región 2.
Variable Valor Unidad de medida
VS_RtGnSp 1800.00 RPM
Vs_RtTq 8376.58 Nm
VS_Rgn2K 0.001974813 -
VS_SlPc 21.11 %
Ya completa la caracterización del AG y el control de torque en la región II, se procede con el diseño
de las ganancias del control de pitch que se encargará de regular la potencia aerodinámica en el rotor
durante toda la región III (velocidades de viento por encima de la nominal). Es importante recordar
que el control de torque en ésta región simplemente mantiene un torque constante en la flecha
mediante la resistencia del generador de inducción. Por otra parte, el control de pitch mantendrá la
Capítulo 5
70
velocidad angular del rotor constante, obteniendo así aproximadamente una potencia constante en el
rotor.
En la actualidad existen variadas técnicas para análisis de sistemas lineales invariantes en el tiempo;
desafortunadamente el mundo en el que vivimos contiene componentes o sistemas de naturaleza no
lineal. Una virtud importante del modelado matemático de sistemas, es que nos permite aislar o
despreciar no linealidades que pudieran no influir de manera significativa en el comportamiento del
sistema, para así desarrollar un modelo lineal. Para pequeñas variaciones alrededor de un punto
diferenciable en una curva no lineal, siempre se puede encontrar una aproximación lineal, teniendo en
cuenta que el valor de este modelo podría depender altamente de su exactitud sobre un rango razonable
de valores [28].
Un punto de operación es la arista que se crea entre valores específicos de las variables independientes
de una función no lineal, en el cual se tiene un comportamiento lineal y de estado estable del sistema,
en un tiempo finito. Para este caso se encontró un punto p (V, β, Ω) en el cual se obtiene un torque
aerodinámico aproximado al nominal (8376.58 N*m del lado de alta velocidad) en estado estable,
cuando el sistema es excitado por las entradas V, β y Ω. Como mencionan Wright y Fingresh [25]
debe escogerse un punto de operación en el cual la derivada parcial del torque respecto al ángulo de
pitch tenga una pendiente negativa y se obtenga el torque nominal del generador en la región 3. Así
que, para obtener el punto de operación requerido se hizo lo siguiente:
1. Deshabilitar todos los grados de libertad en el archivo ElastoDyn. Esto es debido a que no se
necesita estudiar la influencia dinámica de la estructura de la turbina pues el análisis es
meramente aerodinámico, por lo que se estudia la influencia de las variaciones en la velocidad
del viento y el ángulo de pitch, sobre una velocidad rotacional constante del rotor.
2. Se fija una velocidad rotacional en ElastoDyn.
3. Se cede la operación de control de pitch a MATLAB escribiendo 4 en la variable PCMode en
el archivo ServoDyn.

Capítulo 5
71
4. Mediante un código de operación de MATLAB vinculado a FAST, se prueba la incidencia de
una velocidad de viento constante con un ángulo de pitch dado. Se lee el valor del torque del
generador en estado estacionario generado por el ángulo de pitch. Después, se modifica el
ángulo de pitch para obtener una nueva medición de torque.
5. Se cambia la velocidad de viento en ElastoDyn para repetir el proceso del paso 3 y 4.
En la Figura 5.4 se muestra la representación de los valores de estado permanente de torque, para
cada ángulo de pitch y velocidad de viento. En cada línea se tiene un punto que se aproxima al
valor del torque aerodinámico nominal. Este torque aerodinámico es generado en el rotor, y por
lo tanto guarda una relación directa con el torque del generador. En la Tabla 5.4 se encuentran
organizados los puntos de operación obtenidos de cada línea de la gráfica descrita.
Figura 5.4. Gráfico de torque del rotor en función del ángulo pitch. Velocidad angular del rotor fija (Ωr= 20.5 rpm).
0 5 10 15 20 25-1000
-500
0
500
1000
1500
2000
2500
(°)
RotT
orq
(kN
m)
12 m/s
13 m/s
14 m/s
15 m/s
16 m/s
17 m/s
18 m/s
19 m/s
20 m/s
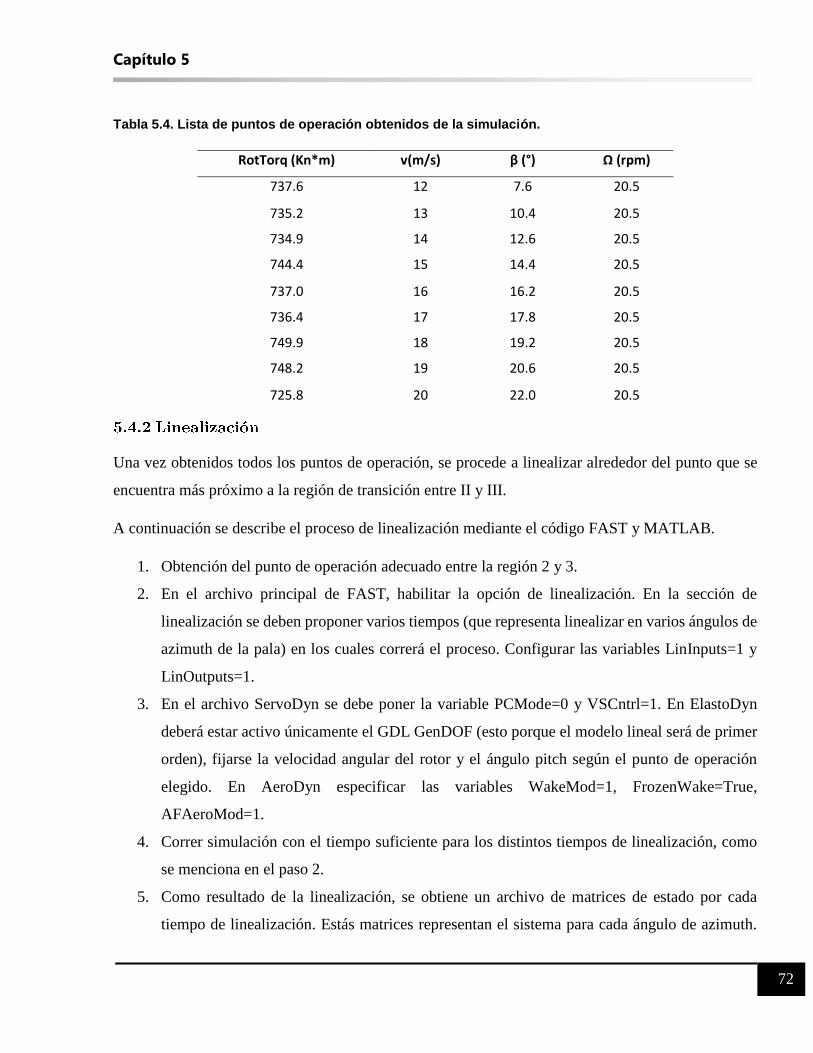
Capítulo 5
72
Tabla 5.4. Lista de puntos de operación obtenidos de la simulación.
RotTorq (Kn*m) v(m/s) β (°) Ω (rpm)
737.6 12 7.6 20.5
735.2 13 10.4 20.5
734.9 14 12.6 20.5
744.4 15 14.4 20.5
737.0 16 16.2 20.5
736.4 17 17.8 20.5
749.9 18 19.2 20.5
748.2 19 20.6 20.5
725.8 20 22.0 20.5
Una vez obtenidos todos los puntos de operación, se procede a linealizar alrededor del punto que se
encuentra más próximo a la región de transición entre II y III.
A continuación se describe el proceso de linealización mediante el código FAST y MATLAB.
1. Obtención del punto de operación adecuado entre la región 2 y 3.
2. En el archivo principal de FAST, habilitar la opción de linealización. En la sección de
linealización se deben proponer varios tiempos (que representa linealizar en varios ángulos de
azimuth de la pala) en los cuales correrá el proceso. Configurar las variables LinInputs=1 y
LinOutputs=1.
3. En el archivo ServoDyn se debe poner la variable PCMode=0 y VSCntrl=1. En ElastoDyn
deberá estar activo únicamente el GDL GenDOF (esto porque el modelo lineal será de primer
orden), fijarse la velocidad angular del rotor y el ángulo pitch según el punto de operación
elegido. En AeroDyn especificar las variables WakeMod=1, FrozenWake=True,
AFAeroMod=1.
4. Correr simulación con el tiempo suficiente para los distintos tiempos de linealización, como
se menciona en el paso 2.
5. Como resultado de la linealización, se obtiene un archivo de matrices de estado por cada
tiempo de linealización. Estás matrices representan el sistema para cada ángulo de azimuth.

Capítulo 5
73
Éstas deben ser promediadas para tener un solo sistema en espacio de estados, como se
menciona en [29].
6. Finalmente se debe llevar el espacio de estados a un sistema de primer orden, donde el estado
único a analizar es la velocidad angular. Se lleva el sistema a la forma explicada en la sección
5.4.
Una vez que se siguió el proceso del apartado anterior, se obtiene una expresión de primer orden como
la de la sección 4.5. Para ello se habilita únicamente el grado de libertad del generador.
El modelo con un solo grado de libertad obtenido en FAST se muestra en la Tabla 5.5. Para obtener
un sistema de primer orden, se pueden despreciar una parte de las variables de entrada y mantener en
el modelo únicamente las que son de nuestro especial interés.
Como único estado, se tiene a la velocidad angular en el lado de alta velocidad (GenSpeed). En
entradas controlables, se mantiene el comando de pitch colectivo (Bpc) y en entrada de perturbación
el valor de la velocidad de viento horizontal (Ifwx). El modelo lineal simple desprecia el estado de
azimuth o posición.
Expresión canónica de variables de estado:
�̇� = 𝐴𝑥 + 𝐵𝑢
𝑦 = 𝐶𝑥 + 𝐷𝑢
Matrices resultantes de la linealización en p (12 m/s, 7.6°, 20.5 rpm):
𝐴 = [0 10 −0.0465
]
𝐵
= [0 0
0.054 −0.01355
0 0 0−0.0001 −0.5166 −0.5125
0 0 0
−0.5086 0 0
0−1.538
]
𝐶 = [0 840]

Capítulo 5
74
𝐷 = 0
Modelo lineal simple de primer orden:
∆Ω̇ = −0.0465∆Ω − 1.538∆β + 0.054∆v (5.3)
Tabla 5.5. Parámetros de entrada/salida presentes en la linealización.
Entradas
Variable Punto de
operación Descripción
Ifwx 12 Velocidad de viento horizontal (uniforme) (m/s)
Ifwy 0 Velocidad de viento vertical (viento cortante) (m/s)
Ifwz 0 Velocidad de propagación de viento (eje z) (m/s)
Bp1 7.6 Comando de pitch para la pala 1 (radianes)
Bp2 7.6 Comando de pitch para la pala 2 (radianes)
Bp3 7.6 Comando de pitch para la pala 3 (radianes)
Ym 0 Momento de yaw (Nm)
GenT 8377 Torque del generador (Nm)
Bpc 7.6 Comando de ángulo pitch colectivo (radianes)
Salidas
Variable Punto de
operación Descripción
GenSpeed 1800 Velocidad angular del generador (rpm)
Utilizando el modelo simple de primer orden, se crea la función de transferencia a lazo cerrado con el
controlador PID incluido. Después, ya quedando como un sistema de segundo orden, se pueden
analizar los polos para verificar los límites superiores e inferiores de las ganancias KD, KP y Ki que

Capítulo 5
75
garanticen la estabilidad del sistema. Dicho sistema queda definido en función de la velocidad angular
del rotor como salida y la velocidad del viento en el eje X como entrada de perturbación.
𝐻(𝑠) = ∆Ω
∆𝑉=
𝐵𝑑𝑆
(1 − 𝐵𝐾𝑑)𝑆2 + (−𝐴 − 𝐵𝐾𝑝)𝑆 + (−𝐵𝐾𝑖)
𝐻(𝑠) =0.054𝑆
(1 + 1.538𝐾𝑑)𝑆2 + (0.0465 + 1.538)𝑆 + (1.538𝐾𝑖)
Tomando como base el criterio de Routh [29], los coeficientes del denominador deben ser positivos,
para asegurar la estabilidad del sistema, por lo que:
𝐾𝑑 > −0.6503 𝐾𝑝 > −0.0303 𝐾𝑖 > 0
Mientras los valores de las desigualdades anteriores se cumplan, se asegura la estabilidad del sistema,
más no el comportamiento dinámico deseado. Para ello se lleva el denominador a la forma de segundo
orden estándar (ver sección 4.5) y así obtener dos ecuaciones que permitan calcular los valores de
ganancias adecuados para un amortiguamiento y frecuencia natural deseados. Por lo tanto las dos
ecuaciones quedan como:
𝐾𝑖 =−𝜔(1 − 𝐵𝐾𝐷)
𝐵
(5.4)
𝐾𝑝 = −𝐴
𝐵−2𝛿𝜔(1 − 𝐵𝐾𝐷)
𝐵
(5.5)
En la Figura 5.5 se muestra la respuesta del sistema no lineal a un escalón de 13-14 m/s para diferentes
valores de factor de amortiguamiento. Se puede observar que el sobrepaso en la respuesta se reduce
conforme se aumenta el valor de 𝛿. Por otra parte, en la Figura 5.6 se presenta un experimento similar,
pero esta vez se dejó fijo el factor de amortiguamiento en 𝛿 = 0.7 y se varió la frecuencia natural. Se

Capítulo 5
76
observa en este caso, que tanto el sobre paso, como el tiempo de establecimiento, se ven modificados.
Las ganancias proporcional e integral se ven afectadas por la variación de la frecuencia natural.
Figura 5.5. Respuesta a escalón del modelo no lineal para diferentes valores de amortiguamiento. Frecuencia natural fija (wn=0.6).
200 205 210 215 220 225 230 235 240
1790
1800
1810
1820
1830
1840
1850
t (s)
Gen
Spe
ed (
rpm
)
=0.7
=0.8
=0.9
=1.0
=1.5
=2.0

Capítulo 5
77
Figura 5.6. Respuesta a escalón del modelo no lineal para diferentes valores frecuencia natural. (𝜹 =𝟎. 𝟕).
La ecuación que rige el comportamiento de la programación de ganancia viene dada por:
𝐺𝐾(𝛽) =1
1 +𝛽𝐾𝐾
Se escogen las ganancias Ki y Kp para tener un desempeño deseado entre la región 2 y 3. Luego, se
corre una linealización a éste punto de operación (entre la región 2 y 3) y se obtienen los valores de
matrices A y B. El valor de KK es el valor de ángulo pitch para el cual la matriz B se ha duplicado
con respecto del punto de operación elegido.
El punto de operación inicial es p (12 m/s, 7.6°, 20.5 rpm). Los valores obtenidos en la linealización
son:
200 210 220 230 240 250 260 270 280
1780
1790
1800
1810
1820
1830
1840
1850
1860
1870
t(s)
Gen
Spe
ed(r
pm)
n = 0.4
n = 0.6
n = 0.8
n = 1.0
n = 1.5
n = 2.0

Capítulo 5
78
A= -0.0464, B= -1.5373
𝐻(𝑠) = ∆Ω
∆𝑣=
𝐵𝑑𝑆
(1 − 𝐵𝐾𝑑)𝑆2 + (−𝐴 − 𝐵𝐾𝑝)𝑆 + (−𝐵𝐾𝑖) (5.6)
𝐻(𝑠) =0.05401𝑆
(1 + 1.5373𝐾𝑑)𝑆2 + (0.0464 + 1.5373𝐾𝑝)𝑆 + (1.5373𝐾𝑖) (5.7)
𝐾𝑖 =−𝜔(1 − 𝐵𝐾𝐷)
𝐵= −
0.6(1 + 1.5373 ∗ 0)
−1.5373= 0.3903 (5.8)
𝐾𝑝 = −𝐴
𝐵−2𝛿𝜔(1 − 𝐵𝐾𝐷)
𝐵= 0.7504
Ahora bien, se debe encontrar un punto de operación para el cual el valor de B sea el doble del valor
obtenido para el punto de operación p (12 m/s, 7.6°, 20.5 rpm). En la Tabla 5.6 se muestran los valores
de la matriz B obtenidos en la linealización, con el fin de encontrar el punto que arroje
aproximadamente el doble del valor de B del punto de operación ya mencionado. Se toma el valor de
la matriz B como referencia debido a que representa la derivada del torque respecto a la variación del
ángulo de pitch.
Tabla 5.6. Valores de B para todos los puntos de operación.
RotTorq (kN*m) v(m/s) β (°) Ω (rpm) B
737.6 12 7.6 20.5 -1.537
735.2 13 10.4 20.5 -1.786
734.9 14 12.6 20.5 -2.005
744.4 15 14.4 20.5 -2.231
737.0 16 16.2 20.5 -2.438
736.4 17 17.8 20.5 -2.738
749.9 18 19.2 20.5 -3.147
748.2 19 20.6 20.5 -3.552
725.8 20 22.0 20.5 -3.926

Capítulo 5
79
Se puede observar de la tabla que el punto de operación p (18 m/s,19.2°,20.5 rpm) es el valor de B
para el cual se duplica el del valor con el cual se construyeron las ganancias inicialmente.
𝐺𝐾(𝛽) =1
1 +𝛽
19.2
Como se ha explicado en apartados anteriores, el código de FAST incorpora varios archivos, donde
cada uno de ellos contiene una función específica en el modelo del AG. Debido a que los microtabs
afectan principalmente a las propiedades estructurales y aerodinámicas del AG, se modifican los
archivos que rigen estas funciones en el modelo. Para el análisis de la parte estructural se tiene
ElastoDyn y para la aerodinámica, AeroDyn.
AeroDyn es un código que puede correr con un ejecutable independiente o ser llamado por el archivo
principal de FAST. Dentro del archivo se mandan llamar a su vez los archivos que contienen los
perfiles aerodinámicos. En estos archivos se encuentran los parámetros como número de Reynolds,
constantes de presión en la geometría, curvas de ajuste de modelo, etc. La estructura de AeroDyn se
muestra en la Figura 5.7. Resaltadas en amarillo se encuentran las que se utilizan para modelar los
microtabs.
La sección de “información de perfiles” importa las tablas de coeficientes correspondientes a los
perfiles aeroinámicos. En éste caso, la pala del AG de 1.5 MW está conformada por 4 diferentes
perfiles; por ello, se importan cuatro archivos diferentes. Luego, en la sección “Aerodinámica del rotor
y palas” se tiene una tabla describiendo la geometría de la pala; se tiene un renglón por cada sección.
Dada la experiencia obtenida en CIDESI y la revisión de literatura, se llegó a la conclusión de colocar
los microtabs a 2/3 de la raíz de la pala. En la Figura 5.8 se representa la distribución de los microtabs

Capítulo 5
80
en forma de tablillas color rojo. Las secciones correspondientes pertenecen al perfil s825_2103B. Con
la modificación de los coeficientes en la tabla de éste archivo, se representa la activación o
desactivación de los microtabs dentro de AeroDyn y por consecuencia se refleja en la simulación del
AG.
Figura 5.7. Secciones de AeroDyn.
Aerodyn
Condiciones ambientales
Opciones de teoría BEM
Teoría Beddoes-Leishman
Información de perfiles
Influencia de la torre
Aerodinámica de rotor y
palas
Opciones generales de simulación

Capítulo 5
81
Figura 5.8. Representación de la pala seccionada y posición de microtabs. Figura adaptada de imagen extraída de internet.
Como se mencionó, se debe modificar el archivo original del perfil aerodinámico s825_2103 para
simular microtabs. Sin embargo, primero se debe conocer como se alterarán los valores de las tablas
de los coeficientes. Como menciona Van Dam [15], dependiendo de la función del microtab será
modificado el perfil original. Para el presente caso de estudio, se requiere que el microtab reduzca las
cargas aerodinámicas de empuje y el desplazamiento de la punta de pala. Para lograrlo, se pretende
simular el despliegue de los microtabs sobre la parte de succión (o parte superior de la pala) que según
menciona Van Dam, reduce el coeficiente de levantamiento.
En el estudio de Muñoz et al. [30] (2017), se obtuvo de manera experimental la influencia de los
microtabs sobre los coeficientes de arrastre y levantamiento, en función del ángulo de ataque (Ver
Figura 5.9). Como resultado se observa un cambio poco notorio en la fuerza de arrastre, mientras que
el levantamiento se reduce entre 50 y 5% para ángulos de ataque de 1 a 12° respectivamente (ver
Tabla 5.7).

Capítulo 5
82
Tabla 5.7. Reducción de coeficiente de levantamiento en función del ángulo de ataque.
s825_2103B Factor de reducción
s825_2103MT
α(°) CL CD α (°) CL CD
1 0.77 0.0086 0.5 1 0.385 0.0086
2 0.88 0.0089 0.5375 2 0.473 0.0089
3 0.98 0.0091 0.575 3 0.5635 0.0091
4 1.09 0.0095 0.6125 4 0.6676 0.0095
5 1.2 0.0098 0.65 5 0.78 0.0098
6 1.3 0.0102 0.6875 6 0.8938 0.0102
7 1.41 0.0107 0.725 7 1.0223 0.0107
8 1.49 0.0155 0.7625 8 1.1361 0.0155
9 1.58 0.0179 0.8 9 1.264 0.0179
10 1.66 0.0203 0.8375 10 1.3903 0.0203
11 1.68 0.025 0.875 11 1.47 0.025
12 1.7 0.0273 0.95 12 1.615 0.0273
Figura 5.9. Reducción de 𝑪𝑳respecto a 𝜶. Resultados de túnel de viento obtenido en CIDESI. Muñoz et al., Enhaced Implementation of Microtabs to Reduce Loads in Wind Turbines, (2017).
Una vez obtenida la nueva tabla de coeficientes (de la tabla s825_2103MT), se procede a modificar
el archivo del perfil s825_2103B. Primero, se debe indicar el número de tablas que se utilizará en el
código. Después, se asigna un indicador (Table ID parameter) a cada tabla; este sirve para identificar
que tabla se quiere usar, según la entrada de control. Por último, se introduce la nueva tabla que

Capítulo 5
83
contiene el modelado de microtabs, junto a la original. A esta configuración de perfil aerodinámico
dentro de FAST se le denomina Multitabla y es conocido comúnmente en la programación de FAST
como MulTabLoc Function.
En la Figura 5.10 se muestra la manera en la que se utiliza la multitabla desde Simulink. Para realizar
esto, primero debe declararse una variable que controle las tablas (en este caso MT). Esta será una
variable binaria – para este caso específico, ya que según la literatura, FAST puede interpolar entre
tablas- tomando el valor de 0 o de 1, según lo requiera el algoritmo. Para que FAST pueda tomar en
cuenta el cambio entre tablas, se hace una interfaz mediante la función S_Function; esto para
comunicar a FAST con Simulink.
Figura 5.10. Diagrama de flujo de activación de microtabs desde Simulink.
MT= 0 MT= 1
Tabla CL (α) #0 Tabla CL (α) #1
MT= 0 MT= 1
SIMULINK
FAST

Capítulo 5
84
El objetivo es cambiar de tabla dinámicamente, mediante una entrada de comando desde Simulink, tal
y como se realiza en [31]. Para ello se debe configurar el bloque de FAST que se introduce en Simulink
para habilitar la entrada de control. En la Figura 5.11 se muestra el contenido del de FAST en
Simulink. Simplemente con dar doble click sobre el multiplexor, se añaden tres nuevas entradas; más
adelante se explica que modificando el código fuente de FAST se añade un vector de 1x3 para tener
una entrada de control para cada pala, esto para modificar el archivo del perfil aerodinámica.
También se ve de la Figura 5.11 que dentro de las opciones de la S-function de FAST, se debe indicar
que se requieren 3 entradas adicionales al código, -1 para deshabilitar la opción de LIDAR, de lo
contrario esta opción se activa automáticamente al activar las tres nuevas variables de entrada;
también, se coloca triple cero para las condiciones iniciales.
Lo que se acaba de trabajar es únicamente la parte externa de la configuración de FAST y Simulink
para poder correr simulaciones con y sin microtabs. En la siguiente sección se explicará cómo debe
modificarse el código fuente de FAST para que el algoritmo interno y las ecuaciones no lineales
contemplen los cambios dinámicos de tablas de coeficientes; con esto se simulará entonces la
presencia de microtabs.

Capítulo 5
85
Figura 5.11. Habilitación de entrada de Microtabs en el bloque de FAST en Simulink.
Dentro de este archivo es donde, habilitando una segunda tabla, se pueden modificar las propiedades
aerodinámicas de un perfil y simular el despliegue de microtabs. Sin embargo, ésta característica no
se encuentra por defecto en el código; por ello se debe modificar si se desea implementar ésta opción
de simulación.
Cuando se descargan los archivos de FAST, dentro de la dirección Compiling/VisualStudio se
encuentra el archivo FAST_Project.vfproj, que contiene todas las subrutinas para las simulaciones.
Éste archivo es un proyecto escrito en lenguaje Fortran y puede compilarse en cualquier plataforma
que soporte el lenguaje. Adicionalmente, se requiere instalar un Math Kernel para la resolución de
operaciones matemáticas y ecuaciones.

Capítulo 5
86
El compilador de Fortran utilizado para éste proyecto fue Visual Studio 2015 e Intel Parallel Studio
XE 2013 VS2013 como Math Kernel. En [31] se realiza la compilación del código utilizando éstas
aplicaciones.
Una vez instaladas las aplicaciones anteriores, se abre el archivo FAST_Project.vfproj. Dentro del
proyecto se despliegan todas las secciones correspondientes a los archivos de modelado de FAST,
como son ElastoDyn, ServoDyn, AeroDyn, etc. Adicionalmente se tienen librearías que tienen
diversas funciones. Para este caso se describen brevemente las librerias y archivos del proyecto que
deben modificarse para introducir los microtabs. Los archivos2 a modificar son los siguientes:
1. FAST_Types.f90
a. Agregar la entrada de control en el módulo FAST_ExternalInputType
b. Agregar posición inicial para flap en el módulo FAST_ExternInitType
2. FAST_Subs.f90
a. Agregar las variables de microtabs en la subrutina AD14_InputSolve_NoIfw.
b. Habilitar el parámetro de MultTabLoc. Éste parametro permite utilizar varias tablas de
coeficientes aerodinámicos en AeroDyn.
c. Agregar la variable m_FAST dentro de las subrutinas CalcOutputs y SolveForInputs.
d. Agregar la variable m_FAST dentro de la subrutina SolveOption2
e. Agregar el valor inicial para los microtabs en la subrutina FAST_InitializeAll
3. FAST_Library.f90
a. Pasar los valores resultantes de microtabs a AeroDyn en la subrutina
FAST_SetExternalInputs.
Después, se debe recompilar el archivo FAST_Library.lib y colocado en la carpeta BIN. Éste archivo
es leído por el código principal de FAST, por lo que la versión que se recomienda guardar la versión
anterior de FAST_Library.lib en otra carpeta para mantener el formato original.
2 La descripción detallada del proceso de modificación y compilación de los archivos de FAST, consultar [50]

Capítulo 5
87
Una de las partes más relevantes de poder introducir microtabs en el modelo de FAST, es realizar el
estudio del comportamiento del sistema y cómo responde ante cargas aerodinámicas con viento
constante y turbulento. Para esto se utilizará un perfil de escalones de viento dentro de la región 3
(Figura 5.12) y posteriormente, utilizando el software de modelado de viento TurbSim [32], se
generará un perfil de viento turbulento utilizado en pruebas de casos de carga; en la Tabla 5.8 se
muestra el perfil de viento utilizado como caso de carga por NREL para la turbina WindPact 1.5 MW.
Además, en la Figura 5.13 se muestra la serie de datos de dicho perfil.
Figura 5.12. Perfil de viento con escalones.
0 10 20 30 40 50 6012
12.1
12.2
12.3
12.4
12.5
12.6
12.7
12.8
12.9
13
t(s)
m/s

Capítulo 5
88
Tabla 5.8. Principales parámetros de perfil de viento generado en TurbSim
Parámetro Asignación
Modelo de turbulencia IEC Kaimal
Turbulencia característica A
IEC standard IEC 61400-1 Ed. 3: 2005
Velocidad media a la altura del Hub 12 m/s
Valor de intensidad de turbulencia a 15 m/s 16%
Valor característico de desviación estándar 2.336 m/s
Escala de turbulencia 42 m
Valor característico de turbulencia en el Hub 19.47%
Tipo de perfil de viento Power Law
Exponente de ley de potencia 0.2
Diámetro del rotor 84 m
Frecuencia de Nyquist 10 Hz
Figura 5.13. Perfil de viento IEC Kaimal.

Capítulo 5
89
El perfil de viento escalonado ayudará a conocer el comportamiento del microtab en condiciones
controladas. Habilitando el grado de libertad de Flapwise en FAST, se podrá monitorear como con
una entrada escalón de viento el microtab influye en la vibración de este modo en las palas del AG;
de igual manera como interacciona con el sistema de control de pitch. Por otra parte, el perfil de viento
IEC Kaimal ayudará a comprender cómo reacciona el microtab ante gradientes abruptos de viento,
donde la frecuencia es mayor a la que puede moverse el actuador de pitch. Para lograr obtener este
conocimiento, se realizan las pruebas mostradas en la Tabla 5.9 se muestran los experimentos a
realizar para determinar la influencia del algoritmo de microtab, sobre las cargas aerodinámicas y el
control de pitch.
Tabla 5.9. Matriz experimental para el estudio de microtabs en FAST.
PR
UEB
AS
PERFIL DE ESCALÓN DE VIENTO PERFIL IEC KAIMAL
1 - Ángulo de pitch fijo (7.6 °) - Microtabs retraídos (MT=0) - Archivo de viento escalón de 12 a 13 m/s - Tiempo de simulación 60 s.
- Control pitch activo - MT desplegado por 1 Hz - Graficar momento y ángulo de pitch - Gráfico de valor RMS del momento FLAP
4
2 - Control de pitch activo - Microtabs retraídos (MT=0) - Archivo de viento escalón de 12 a 13 m/s - Tiempo de simulación 60 s.
- Control pitch activo - MT desplegado por 2 Hz - Graficar momento y ángulo de pitch - Gráfico de valor RMS del momento FLAP
5
3 - Control de pitch activo - Microtabs desplegados (MT=1) por 3 segundos - Archivo de viento escalón de 12 a 13 m/s - Tiempo de simulación 60 s.
- Control pitch activo - MT desplegado por 5 Hz - Perfil de viento IEC - Graficar momento y ángulo de pitch - Gráfico de valor RMS del momento FLAP
6

Capítulo 6
90
En éste último capítulo, se analizarán los resultados que arrojaron las simulaciones planeadas
anteriormente. Parte de esto es analizar y comprobar el funcionamiento de los controladores en la
región II y III, realizando una comparativa con los resultados de las simulaciones sin implementación
de control en dichas regiones. Posteriormente, se comprueba la activación de los microtabs cuando se
enlaza FAST con SIMULINK; adicionalmente se estudia la influencia de la activación de los
microtabs sobre los momentos de flexión en la punta de la pala (Bendin Moment) y el actuador de
pitch.
Los siguientes resultados se obtuvieron al simular una señal de viento escalón desde 1 hasta 10 m/s.
Ésta señal se generó para el código de InflowWind. Los escalones fueron utilizados para ver la
respuesta en estado estable de torque del generador con y sin control.
En la Figura 6.1 se observa la respuesta del sistema al control de velocidad utilizando la curva
cuadrática de torque junto con la respuesta del sistema en velocidad fija (o sin control de velocidad).
El resultado muestra que el torque en velocidad fija es efectivamente menor que la respuesta con
control y que gracias a la introducción de la región 2 ½ el torque nominal y la velocidad nominal se
alcanzan aproximadamente al mismo tiempo. Esto es que a 1800 RPM el torque en el generador fue
de 8.384 kNm. Por otra parte, se observa que en velocidad fija al alcanzar los 1800 RPM de velocidad,
el torque en el generador es 0.4455 kNm.

Capítulo 6
91
Figura 6.1. Gráfico comparativo torque-velocidad angular.
Por lo tanto, se observa que el control genera una curva de torque donde se sigue el máximo nivel de
Cp, ya que el objetivo de esta región es extraer la mayor cantidad de energía del viento.
En la Figura 6.2 se observa el comportamiento del coeficiente de potencia con y sin control.
Claramente el control de torque mantiene el coeficiente alrededor del punto óptimo (λop) Cpmax0.51,
mientras que sin el control la eficiencia se ve reducida con el aumento en la velocidad del viento hasta
un 90%, desde Cp=0.5 hasta Cp=0.05. Durante la simulación, el ángulo de pitch se mantuvo en
β=βop=7.5°.
900 1000 1100 1200 1300 1400 1500 1600 1700 1800
0
1
2
3
4
5
6
7
8
g (rpm)
Tg(K
n*m
)
Control
No control

Capítulo 6
92
Figura 6.2. Gráfica comparativa de eficiencia aerodinámica.
Como se mostró en la metodología, se diseñaron dos controladores, uno PI clásico, y otro con
ganancias programadas. El segundo contiene el esquema base del PI clásico, con la diferencia de que
las ganancias son multiplicadas por una función lineal. Ésta función se obtuvo a partir del valor de
ángulo para el cual la matriz B del modelo linealizado, fuera el doble del valor original. Esto fue
asumiendo que conforme se aumentaba el escalón de viento, el sobrepaso tambien aumentaba; sin
embargo, en la experimentación esto no resultó así. Por el contrario, el sobrepaso se disminuye,
conforme se aumenta el escalón de viento, tal y como se muestra en la Figura 6.3.
50 100 150 200 250 300 350 400 450 500
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
X: 179.8Y: 0.5103
t (s)
Cp (
--)
Control
No control

Capítulo 6
93
Figura 6.3. Reducción de sobrepaso con un escalón de viento mayor.
Observando la ecuación 6.1 y haciendo referencia a la ecuación 4.3, Wright explica:
“Aunque existe una relación no lineal entre el factor de amortiguamiento δ y B, en general la
magnitud de δ debe incrementar con el aumento de B. Esto explica el hecho de que, sin
ganancia programada, el sobrepaso es menor en escalones de velocidades de viento más
alejadas de la nominal”.
𝛿 =(−𝐴 − 𝐵𝐾𝑃)
2√−𝐵𝐾𝑖
(6.1)
En el estado del arte se muestra que la matriz B es la que representa la variación del torque
aerodinámico respecto al ángulo de pitch. Esto tiene el fin de que se tenga la misma respuesta del
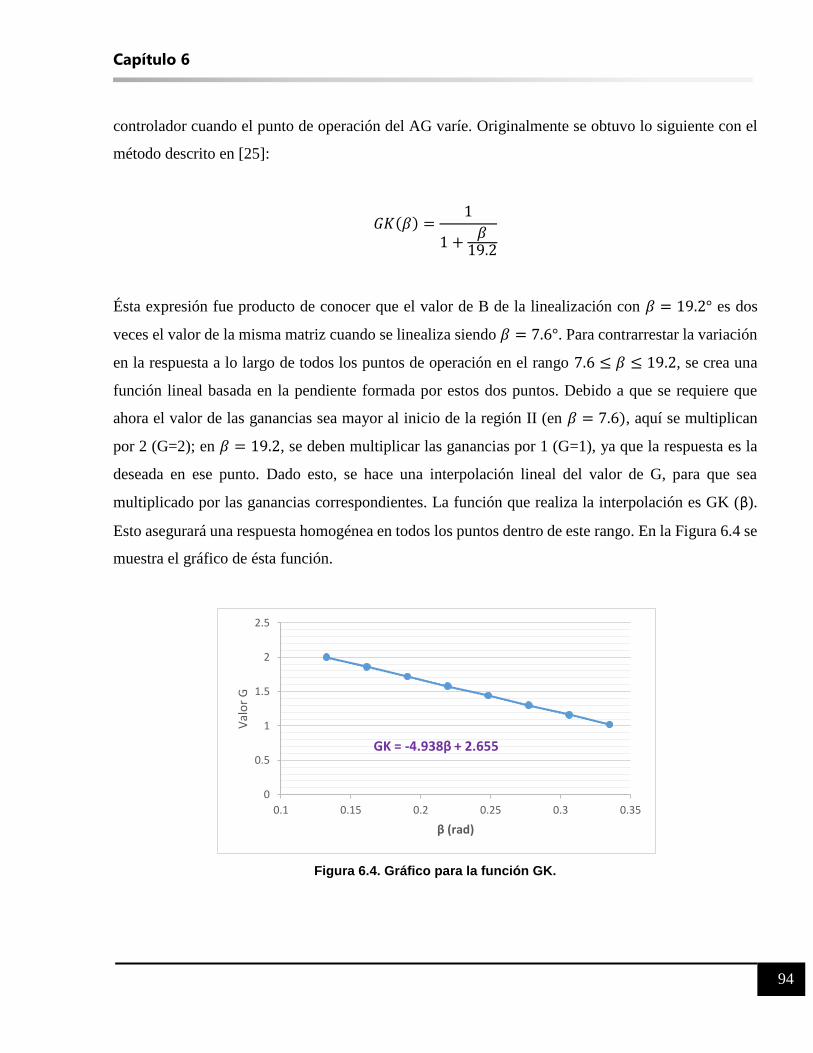
Capítulo 6
94
controlador cuando el punto de operación del AG varíe. Originalmente se obtuvo lo siguiente con el
método descrito en [25]:
𝐺𝐾(𝛽) =1
1 +𝛽
19.2
Ésta expresión fue producto de conocer que el valor de B de la linealización con 𝛽 = 19.2° es dos
veces el valor de la misma matriz cuando se linealiza siendo 𝛽 = 7.6°. Para contrarrestar la variación
en la respuesta a lo largo de todos los puntos de operación en el rango 7.6 ≤ 𝛽 ≤ 19.2, se crea una
función lineal basada en la pendiente formada por estos dos puntos. Debido a que se requiere que
ahora el valor de las ganancias sea mayor al inicio de la región II (en 𝛽 = 7.6), aquí se multiplican
por 2 (G=2); en 𝛽 = 19.2, se deben multiplicar las ganancias por 1 (G=1), ya que la respuesta es la
deseada en ese punto. Dado esto, se hace una interpolación lineal del valor de G, para que sea
multiplicado por las ganancias correspondientes. La función que realiza la interpolación es GK (β).
Esto asegurará una respuesta homogénea en todos los puntos dentro de este rango. En la Figura 6.4 se
muestra el gráfico de ésta función.
Figura 6.4. Gráfico para la función GK.
GK = -4.938β + 2.655
0
0.5
1
1.5
2
2.5
0.1 0.15 0.2 0.25 0.3 0.35
Val
or
G
β (rad)
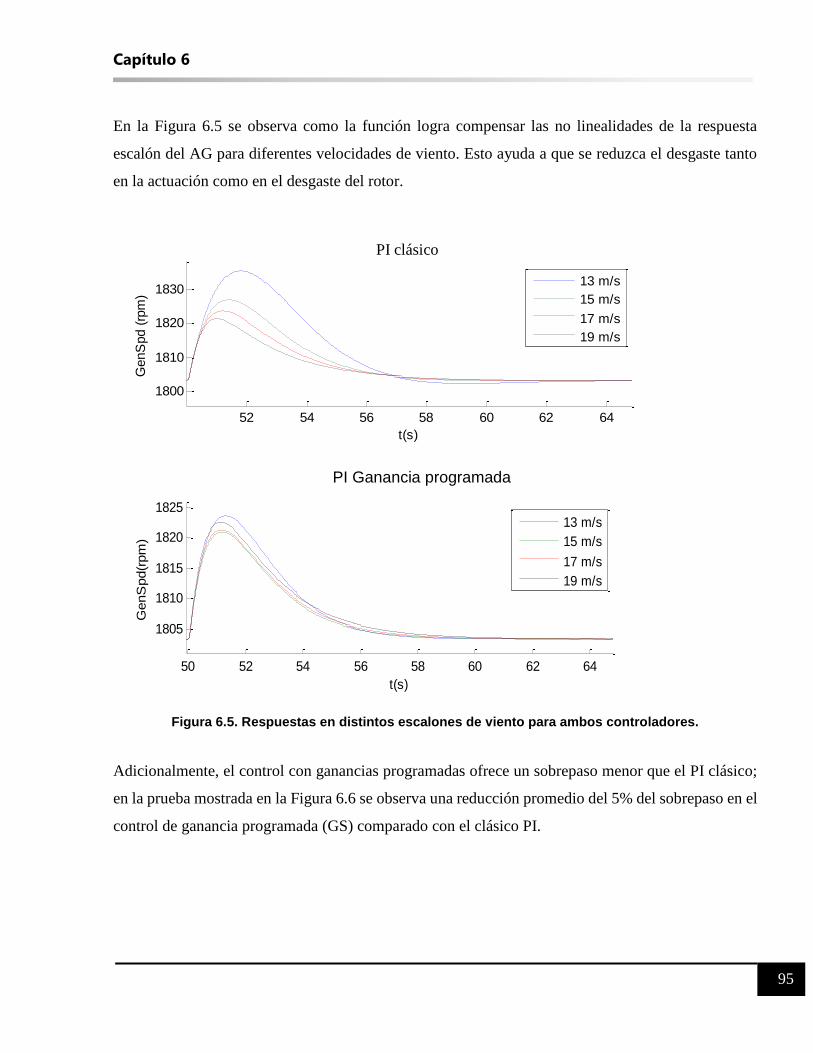
Capítulo 6
95
En la Figura 6.5 se observa como la función logra compensar las no linealidades de la respuesta
escalón del AG para diferentes velocidades de viento. Esto ayuda a que se reduzca el desgaste tanto
en la actuación como en el desgaste del rotor.
Figura 6.5. Respuestas en distintos escalones de viento para ambos controladores.
Adicionalmente, el control con ganancias programadas ofrece un sobrepaso menor que el PI clásico;
en la prueba mostrada en la Figura 6.6 se observa una reducción promedio del 5% del sobrepaso en el
control de ganancia programada (GS) comparado con el clásico PI.
52 54 56 58 60 62 64
1800
1810
1820
1830
t(s)
GenS
pd (
rpm
)
Respuesta PI clásico
50 52 54 56 58 60 62 64
1805
1810
1815
1820
1825
t(s)
GenS
pd(r
pm
)
13 m/s
15 m/s
17 m/s
19 m/s
13 m/s
15 m/s
17 m/s
19 m/s
52 54 56 58 60 62 64
1800
1810
1820
1830
t(s)
GenS
pd (
rpm
)
Respuesta PI clásico
50 52 54 56 58 60 62 64
1805
1810
1815
1820
1825
t(s)
GenS
pd(r
pm
)
13 m/s
15 m/s
17 m/s
19 m/s
13 m/s
15 m/s
17 m/s
19 m/s
PI clásico
PI Ganancia programada

Capítulo 6
96
Figura 6.6. Respuesta de velocidad del generador para PI y GS.
Por otra parte, en la Figura 6.7 se muestra la respuesta del actuador de pitch. Como puede observarse,
la respuesta del actuador de pitch con el control de GS es de primer orden, mientras que para el clásico
es de segundo orden aproximadamente. Claramente puede verse que se tiene una mayor velocidad de
respuesta en el GS y requiere de un ángulo de pitch menor para compensar la entrada escalón de
viento. Esto remunera en un menor uso del actuador a largo plazo.
0 20 40 60 80 100 120 140 1601550
1600
1650
1700
1750
1800
1850
t(s)
GenS
peed (
RP
M)
PI
GS

Capítulo 6
97
Figura 6.7. Respuesta en el actuador de pitch.
Con el sistema de control de pitch completo, se procede a experimentar con los microtabs como
sistema auxiliar en la reducción de cargas aerodinámicas de alta frecuencia.
La Figura 6.8 muestra el momento de flexión en la punta de una de las palas del AG. Éstos resultados
se obtuvieron de una entrada escalón de viento desde 12 hasta 13, en pasos de 0.5 m/s cada 20
segundos de simulación. Con esto, se puede apreciar en el tiempo de simulación t=20 que la respuesta
en momento de flexión al escalón de viento es reducida, cuando se encuentran activos los microtabs.
10 20 30 40 50 60 70
3
4
5
6
7
8
9
10
t(s)
ángulo
pitch (
°)
GS
PI

Capítulo 6
98
Figura 6.8. Momento de flap obtenido de las pruebas 1 a la 3.
Por otra parte, puede verse en la línea azul (representando la actuación del microtab por 3 segundos)
que cuando el microtab es retraído (t=23), el momento se incrementa momentanamente.
Adicionalmente, en la Figura 6.9 se muestra como se comporta el actuador de pitch ante los escalones
de viento cuando hay presencia y ausencia de microtabs. Se demostró que claramente hay una
reducción en el uso del actuador de pitch. Esto se debe a que el microtab reduce el coeficiente de
levantamiento. El pitch guarda una relación directa con éste coeficiente, por lo que al verse reducido,
un menor ángulo es suficiente para aliviar los escalones de viento incidentes. De igual manera, puede
apreciarse como la respuesta se normaliza cuando los microtabs son retraídos.
20 21 22 23 24 25 26 27 28 29 30
800
850
900
950
1000
1050
1100
1150
1200
1250
1300
t(s)
KN
m
Flap Bending Moment
Control Pitch, MT=0
No Control Pitch, MT=0
Control Pitch, MT=1 por 3 s
Control Pitch, MT=1 por 10s

Capítulo 6
99
Figura 6.9. Respuesta del actuador de pitch durante las pruebas 1 a la 3.
Para comprobar que el momento de flap y la actuación del pitch se reducen, se introdujo una entrada
de viento de onda cuadrada, con una amplitud que va desde 13 a 14 m/s, con una frecuencia de 0.5
Hz. Se corrieron tres pruebas en las que se modificó el tiempo de activación de los microtabs. En la
Figura 6.10 se puede observar como la presencia del microtab ayuda a reducir la amplitud del
momento generado en la punta de la pala. Por otra parte, se observa que una vez retraídos se presenta
un estado transitorio en el momento de la pala, para después establecerse en el mismo valor de
ausencia de microtabs.
En los tres casos se habilitó el control PI de pitch con ganancias programadas. De las gráficas se puede
observar que el actuador de pitch no puede compensar las cargas debido a los escalones abruptos de
viento y con la frecuencia propuesta.
0 10 20 30 40 50 606.5
7
7.5
8
8.5
9
9.5
10
10.5
11
t(s)
(°)
Variación de ángulo pitch
Control Pitch,MT=0
Control Pitch, MT=1 por 3 s
Control Pitch MT=1 por 10 s

Capítulo 6
100
Figura 6.10. Momento de flap obtenido en distintos tiempos de activación de microtabs.
Adicionalmente, en la Figura 6.11 se puede observar como la activación de los microtabs beneficia
en reducir el ángulo de actuación de pitch. Esto se debe a que la acción de los microtabs reduce el
coeficiente de levantamiento; debido a que el coeficiente de levantamiento se encuentra relacionado
con la potencia generada en el AG, el ángulo que necesita el actuador de pitch también se ve reducido.
Esto se ve traducido a largo plazo en un menor desgaste del actuador y la prolongación en la vida útil
del componente.
40 41 42 43 44 45 46 47 48 49 50
600
700
800
900
1000
1100
1200
Knm
FlapMoment
40 41 42 43 44 45 46 47 48 49 50
13
13.2
13.4
13.6
13.8
14
Perfil de viento
t
m/s
MT=0
MT=0.5s
MT=1s

Capítulo 6
101
Figura 6.11. Respuesta del actuador de pitch para distintos tiempos de activación de microtabs.
40 42 44 46 48 50 52
10.2
10.4
10.6
10.8
11
11.2
11.4
11.6
11.8
12
12.2
t
(°)
Ángulo de pitch
MT=0
MT=0.5s
MT= 1s

Capítulo 7
102
En el presente trabajo se presentó un algoritmo de control de pitch proporcional, integral derivativo
(PID) clásico, un PID con ganancias programadas y una lógica de control de microtabs, actuando
sobre un aerogenerador de eje horizontal de 1.5 MW. El modelo y las simulaciones requeridas para
estudiar el desempeño de los controladores se hizo en el software FAST, creado por NREL y la
Universidad de Oregon. Este software fue utilizado debido a su reconocimiento a nivel mundial,
información disponible en línea y ser un código de uso libre.
Inicialmente se estudiaron los tipos de aerogeneradores, las partes que lo conforman hasta llegar a los
esquemas de control más utilizados en la industria y otros más robustos encontrados en la literatura.
Considerando que el AG es un sistema completamente mecatrónico – incluyendo la aerodinámica
como rama de estudio – el modelado se volvió complejo. Buscando en la literatura se encontraron
desde lo modelos más sencillos hasta los que requerían soluciones de ecuaciones no lineales muy
extensas. Debido a que el enfoque era comprender los modelos y destinar la mayor parte al análisis
de controladores, se optó por utilizar un código de modelado como lo es FAST. Para llegar a
comprender y dominar el software, se dedicaron bastantes horas de estudio, debido a que la curva de
aprendizaje fue bastante lenta. Uno de los factores por los que el aprendizaje y dominio llevó tiempo,
fue el hecho de que solo se contaba con manuales en línea, sin ningún entrenamiento especial ni curso,
haciendo el ejercicio de manera autodidacta.
Una vez que se llegó al dominio de FAST, se pudo hacer un estudio a detalle de las metodologías de
control mostradas por NREL en varias de sus publicaciones. Mediante diferentes pruebas y corrección
de errores y comparación con los resultados mostrados por NREL, se lograron implementar de manera
adecuada y funcional los sistemas de control de torque y de pitch.

Capítulo 7
103
Otro de los beneficios que ofrece FAST en su versión 16, es el poder obtener un modelo lineal del AG
en un punto de operación específico; el modelo puede tener desde 1 hasta 21 grados de libertad, lo
cual nos habla de que se puede diseñar un sistema de control tan complejo como se quiera.
Posteriormente, se encontró con el reto más grande del proyecto: poder habilitar dentro del modelo de
FAST la acción de los microtabs. Este paso llevó también un tiempo, ya que según información
contenida en blogs de NREL, se debía modificar el código fuente del ejecutable de FAST; éste código
se encuentra programado en FORTRAN con miles de líneas de código. Aun así, se logró modificar el
código y compilarlo, gracias al apoyo de un tesista de doctorado de la universidad de Michigan, quien
había realizado simulaciones con flaps. Se corrió el nuevo código y se hicieron simulaciones;
efectivamente ahora el modelo permitía activar y desactivar los microtabs.
En FAST para simular la acción de microtabs en el modelo, se debe insertar una nueva tabla de
coeficientes aerodinámicos, mientras que en la construcción de la pala se debe introducir este nuevo
perfil. Para la obtención de estas nuevas tablas, se requirió del apoyo del Dr. Guillermo Muñoz, quien
es experto en aerodinámica de aerogeneradores. El Dr. Muñoz, junto al equipo del área de energías
de CIDESI ya habían realizado experimentación en prototipos con microtabs. La información
resultante fue la que se utilizó para la modificación de las tablas del perfil que contendría los
microtabs, dentro de AeroDyn.
El proyecto logró reportar varias contribuciones al proyecto P03 dentro del CEMIE Eólico. Algunas
de las contribuciones principales fueron:
Generación de conocimiento en algoritmos de control
Conocimiento en un software de simulación de uso libre. Esto ayudará a realizar estudios en
energía eólica de manera confiable y a bajo costo.
Construcción de un algoritmo de control entre Simulink y FAST que puede ser utilizado como
base para proyectos futuros.

Capítulo 7
104
Documentación del proceso de simulación de microtabs dentro de FAST. Cabe mencionar que
el software adquirido por CIDESI no contaba con esta función, lo cual proporciona una nueva
herramienta de análisis.
Posibilidad de impartición de cursos con el conocimiento de FAST.
Como objetivo se planteó que la introducción de un dispositivo activo de control de carga
aerodinámica como lo es el microtab, ayuda a reducir el momento de flexión en las palas, actuando
en los picos de alta frecuencia de velocidad del viento que el actuador de pitch no puede compensar
en tiempo debido a su relativa lenta dinámica respecto al actuador de microtab.
Se observó en la experimentación que en los escalones de viento, el microtab ayuda a reducir el nivel
de las oscilaciones en el momento de flexión de la pala y adicionalmente a reducir el uso del actuador
de pitch, lo que remunera en prolongación de vida útil el actuador. Sin embargo, no se logró reducir
en el porcentaje planteado en la hipótesis. Se cree que la razón es debido a que se requiere de un
análisis completo en CFD del perfil que requiere microtabs, para asegurar que tiene el comportamiento
aerodinámico deseado. Sería interesante demostrar que esto ayudaría a reducir más las cargas sobre
la pala. Otro factor a tener en cuenta es que el ángulo de pitch tiene influencia en la “efectividad” de
actuación de los microtabs.
Como trabajo futuro, se recomienda realizar un estudio aerodinámico detallado de la geometría de una
pala con y sin microtab, para una mayor certeza en la respuesta del sistema. También, al utilizar la
versión 14 de AeroDyn, no se puede hacer un monitoreo completo de los coeficiente aerodinámicos,
lo que es una limitante de análisis.
Adicionalmente, la comparativa entre un modelo matemático que contemple las ecuaciones
aerolásticas de los microtabs y el modelo de FAST ayudaría a tener un entendimiento más profundo
del software. También, sería interesante llevar a cabo una linealización del sistema contemplando un

Capítulo 7
105
mayor número de grados de libertad y así estudiar sistemas de control más robustos como control de
estados, redes neuronales, LQR, modos deslizantes, etc.

[1] I. Statistics, «Recent Energy Trends in OECD,» 2015.
[2] G. W. E. Consule, «Global Wind Report: Annual Market Update,» Ulaanbaatar, Mongolia,
2016.
[3] GWEC, «Annual market update,» Global Wind Report, 2014.
[4] M. Sathyajith, «Wind Energy Fundamentals, Resource Analysis and Economics», New York:
Springer, 2006.
[5] L. Y.-. Pao y K. E. Jhonson, «Control of wind turbines: Apporaches, challenges and recent
developments,» IEEE Control Systems Magzine, pp. 44-62, April 2011.
[6] F. D. Bianchi, R. J. Mantz y H. de Battista, «Control Objetives and strategies» de Wind control
systems, La Plata, Springer-Verlag London Limited, 2007.
[7] L. Fernández, C. García y F. Jurado, «Modelling and Control of Wind Turbines,» de Wind
energy Handbook, Springer Berlin Heidelberg, 2013.
[8] J. Njiri y D. Soffker, «State-of-Art in Wind Turbine Control: Trends and Challenges,»
Renewable and Sustainable Energy Reviews, 2015.
[9] M. Á. Lara Trejo, «Coeficientes aerodinámicos y reducción de cargas en aspas de turbinas
eólicas a través de microtabs», Querétaro: CIDESI, 2017.
[10] W. I. Kade, «Aerodynamic Design of Wind Turbine Blades Utilising non Conventional Control
Systems», Northumbria University, Northumbria, 2012.
[11] R. H. Liebeck, «Design of Subsonic Airfoils for High Lift,» Journal of Aircraft, vol. 15, nº 9,
pp. 547-561, 1978.
[12] R. C. a. C. v. Dam, «Computational Investigation of Deploying Load Control Microtabs on a
Windturbine Airfoil,» Aerospace Sciences Meeting and Exhibit , pp. 8-11, 2007.
[13] v. D. C. S. R. a. C. S. Yen-Nakafuji, «Active Load Control for Airfoils Using Microtabs,»
Journal of Solar Energy Engineering, pp. 282-289, 2001.

107
[14] v. D. C. B. F. S. R. a. C. S. Yen, «Active Load Control and Lift,» AIAA, 2002.
[15] D. Y. N. C. B. D. C. K. S. C.P. Van Dam, «Computational Desing and Analisys of a Microtab
Based on Aerodynamic Loads Control System for Lifting Surfaces,» SPIE International Society
for Optical Engineers, 2003.
[16] M. Singh, E. Muljadi, J. Jonkman, I. Girsang y J. Dhupia, «Simulation for Wind Turbine
Generators- With FAST and MATLAB-Simulink Modules» Golden, Co, 2014.
[17] A. Murray Cooperman, C. van Dam y D. E. Berg , «Wind Tunnel Testing of Microtabs and
Microjets for Active Load Control of Wind Turbines», 2005.
[18] A. K. Barlas, «Active Aerodynamic load control on wind turbines: Aeroservolastic modeling
and wind tunnel experiments», DTU, Ed., 2011.
[19] N. Li y M. Balas, «Aerolastic control of wind turbine blade using Microtabs based on
UA97w300_10 Airfoil», Wind Engineering, vol. 37, nº 5, pp. 501-5016, 2013.
[20] T. Macquart, A. Maheri y K. Busawon, «Microtab Dynamic Modelling for Wind Turbine Blade
Load Rejection» Renewable Energy, 2013.
[21] T. Macquart y A. Maheri, «Integrated Aerolastic and Control Analysis of Wind Turbine Blades
Equipped with Microtabs,» Renewable Energy, vol. 75, pp. 102-114, 2014.
[22] A. Berit Bach, «Gurney Flaps and Micro-Tabd for Load Control on Wind Turbines», Berlin,
2016.
[23] B. Boukhezzar, L. Lupu, H. Siguerdidjane y M. Hand, «Multivariable Control strategy For
Variable Speed Variable Pitch Wind Turbines,» Renewable Energy, vol. 32, pp. 1273-1287,
2006.
[24] J. M. Jonkman y M. L. Buhl Jr., «FAST User's Guide,» 2005.
[25] A. D. Wright y L. J. Fingersh, «Advanced Control Design for Wind Turbines. Part I: Control
Design, Implementation and Initial Tests,» Goden, Colorado, 2008.
[26] L. Hanzo y et. Al., «Power Conversion and Control of Wind Energy Systems,» Apéndice B.P.
IEEE Press, p. 322, 2011.
[27] D. Malcolm y A. Hansen, «WindPact Turbine Rotor Design Study,» Golden, Co, 2002.

108
[28] J. A. Jalkio, «The Role of Modeling in Mechatronics Design,» de Mechatronics Handbook,
2002, p. 676.
[29] K. Ogata, «Ingeniería de Control Moderna», 5ta ed., Pearson, 2010.
[30] D. Berg, J. Zayas y D. Lobitz, «Active Aerodynamic Load Control of Wind Turbine Blades,»
Proceedings of 5th Joint ASME/JSME Fliuds Engineering Conference, 2007.
[31] B. Jonkman, «Compiling FAST v8.15.00a-bjj,» 2016.
[32] N. Kelley y B. Jonkman, «Overview of the TurbSim Stochastic Inflow Turbulence Simulator,»
NREL, 2007.
[33] WWEA, «New record in worldwide wind installations,» 2015. [En línea]. Available:
http://www.wwindea.org.
[34] O. o. e. e. &. r. energy, «Advantages and challenges of wind energy,» [En línea]. Available:
http://energy.gov/eere/wind/advantages-and-challenges-wind-energy..
[35] J. Bartley, «Advantages and disadvantages of wind energy,» Clean energy Ideas, 2015. [En
línea]. Available: http://www.clean-energy-ideas.com/wind/wind-energy/advantages-and-
disadvantages-of-wind-energy..
[36] S. Mathew, «Wind Energy. Fundamentals, Resource Analysis and Economics», Springer, 2006.
[37] D. W. I. Association, «WindPower Wiki: Generators,» 2003. [En línea]. Available:
http://www.windpower.org/eng/knowledge.
[38] W. Shepherd y L. Zheng, «Electricity Generation Using Wind Power», World Scientific
Publishing Company, 2010.
[39] H. G. Enriquez, «El libro práctico de los generadores, transformadores y motores», Limusa,
2004.
[40] B. Guru y H. Huseyin, «Máquinas eléctricas y transformadores», New York: Oxford University,
2003, pp. 403-404.
[41] J. Gimenez Alvarez y J. Gómez Targarona, «Scielo,» 20 Junio 2011. [En línea]. Available:
www.scielo.org.co.

109
[42] W. Hermann-Josef y M. Jyotiramay, «Introduction to Wind Energy systems», 2nd ed., New
york: Springer, 2013.
[43] D. Wilson, D. Berg, F. Barone, J. Berg, B. Resor y D. Lobitz, «Active Aerodynamic Blade
Control Design for Load Reduction on Large Wind Turbines,» European Wind Energy
Conference & Exhibition, 2009.
[44] E. Siebenthaler, «Variable Speed Wind Turbine having a passive Grid side rectifier with Scalar
power control and dependent pitch». USA Patente U.S. Patent 6856041 (B2), 15 Febrero 2005.
[45] A. Wobben, «Wind energy Installation». USA Patente U.S. Patent 6361275 (B1), 26 Marzo
2002.
[46] B. Jonkman y J. Jonkman, «README_FAST8,» 2016.
[47] J. Jonkman, S. Butterfield, W. Musial y G. Scott, «Definition of a 5-MW Reference Wind
Turbine for Offshore System Development,» NREL, 2009.
[48] A. D. Wright, «Modern Control Design For Flexible Wind Turbines,» NREL,Golden, Colorado,
2004.
[49] U. Fernández-Gamiz, E. Zulueta, A. Boyano, J. A. Ramos-Hernanz y J. M. Lópe-Guede,
«Microtab Design and Implementation on a 5 MW Wind Turbine,» Applied Science, vol. 7, nº
536, pp. 1-18, 2017.
[50] X. Sun, «Instruction on the incorporation of active flap control in FAST code,» 2017.
[51] W. Kade, «Aerodynamic Design of Wind Turbine Blades Utilising Nonconventional Control
Systems», Newcastle: Univeristy of Northumbria, 2012.



112


















