Planta de Nivel
19
Introducción En el siguiente informe se documentará el trabajo realizado con la tercera maqueta en estudio; La maqueta de nivel. Como primera fase se identificaran las partes y se conectaran en lazo abierto y cerrado, luego realizarán pruebas con distintos bloques de control para generar diferentes curvas de respuestas. Para esta experiencia la maqueta se encontraba en malas condiciones, por lo que no fue un ejemplo óptimo de una planta de nivel, debido a esto solo se utilizó para obtener la función de transferencia adecuada y simular la planta (SIMULINK). Para el análisis se puso a prueba con diferentes bloques de control disponibles, obteniendo las curvas de respuestas correspondientes según cada bloque de control utilizado. Finalmente una vez expuestos los resultados y curvas de respuestas durante el desarrollo del informe, se analizaron los resultados obtenidos para cada caso. Objetivos Identificar las partes de la maqueta de nivel. Encontrar la función de transferencia de la planta. Realizar la conexión para lazo abierto. Realizar la conexión para lazo cerrado. Utilizar controladores PID, PI, PD, P, I para obtener y analizar las diferentes curvas de respuesta que entregue la planta.
-
Upload
kristhian-munoz-moya -
Category
Documents
-
view
7 -
download
0
description
nivel de GUA
Transcript of Planta de Nivel

Introducción
En el siguiente informe se documentará el trabajo realizado con la tercera maqueta en estudio; La maqueta de nivel.
Como primera fase se identificaran las partes y se conectaran en lazo abierto y cerrado, luego realizarán pruebas con distintos bloques de control para generar diferentes curvas de respuestas.
Para esta experiencia la maqueta se encontraba en malas condiciones, por lo que no fue un ejemplo óptimo de una planta de nivel, debido a esto solo se utilizó para obtener la función de transferencia adecuada y simular la planta (SIMULINK).
Para el análisis se puso a prueba con diferentes bloques de control disponibles, obteniendo las curvas de respuestas correspondientes según cada bloque de control utilizado.
Finalmente una vez expuestos los resultados y curvas de respuestas durante el desarrollo del informe, se analizaron los resultados obtenidos para cada caso.
Objetivos
Identificar las partes de la maqueta de nivel.
Encontrar la función de transferencia de la planta.
Realizar la conexión para lazo abierto.
Realizar la conexión para lazo cerrado.
Utilizar controladores PID, PI, PD, P, I para obtener y analizar las diferentes curvas de
respuesta que entregue la planta.
Concluir acerca de las diferentes respuestas de la planta.

Materiales
“Planta de nivel”. “Fuente de poder”.
“Tester digital con conexión rs232”. “Estanque con nivel”.

Obteniendo la función de transferencia de la planta
Tenemos los siguientes datos:
- SP = 8V- Nivel máximo de la planta = 520
Con estos datos podemos obtener el valor de K utilizando la siguiente fórmula:
SPx K=Nivelmaximo
Reemplazando los valores:
8 x K=520
K=5208
K=65
Al determinar el τ nos resultó:
τ = 97Obteniendo la función de transferencia:
6597 s+1
Una vez obtenida la función de transferencia se procede a poner a prueba la respuesta de la planta aplicando diferentes tipos de control y de esta manera obtener las curvas de respuestas según correspondan, para su posterior análisis.
Tanto para el lazo abierto y cerrado se analizaran 3 SP, para el control PID, PI, PD, I y P se analizaran solamente con e SP máximo de la planta que lo que nos interesa analizar es el comportamiento de la curva de respuesta.

Lazo Abierto
“Diseño de SIMULINK para lazo abierto con SP max”.
“Curva de respuesta para lazo abierto SP máximo”.
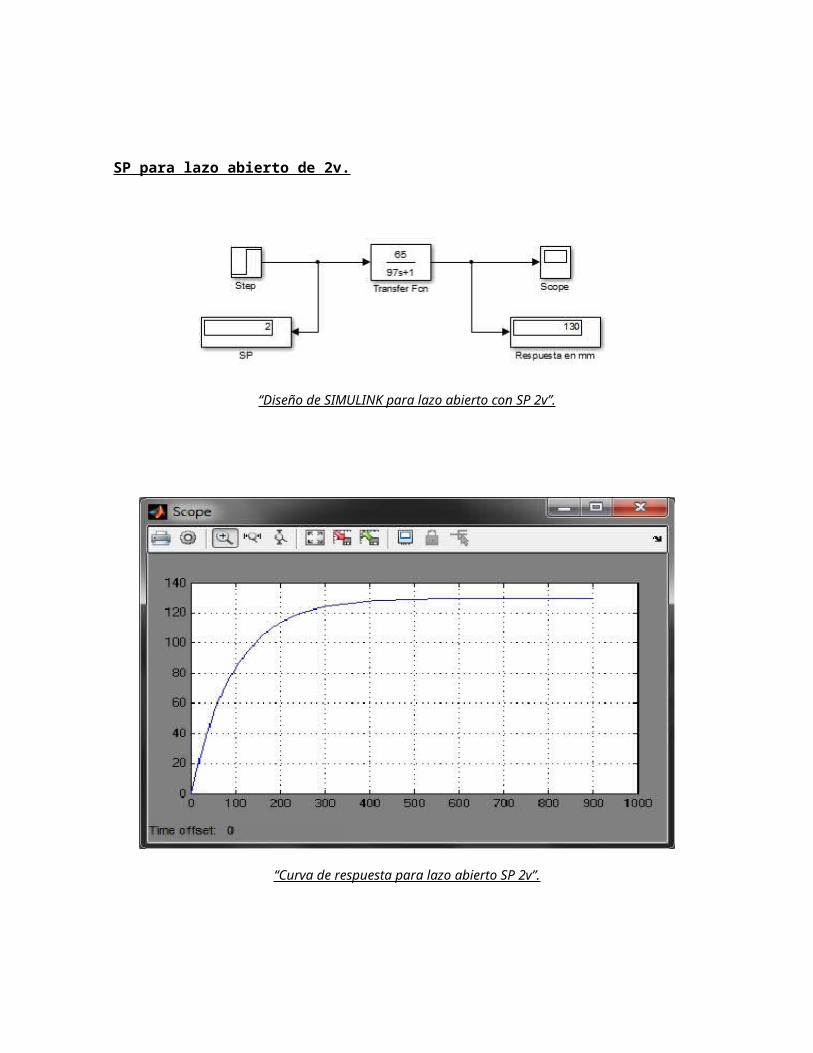
SP para lazo abierto de 2v.
“Diseño de SIMULINK para lazo abierto con SP 2v”.
“Curva de respuesta para lazo abierto SP 2v”.

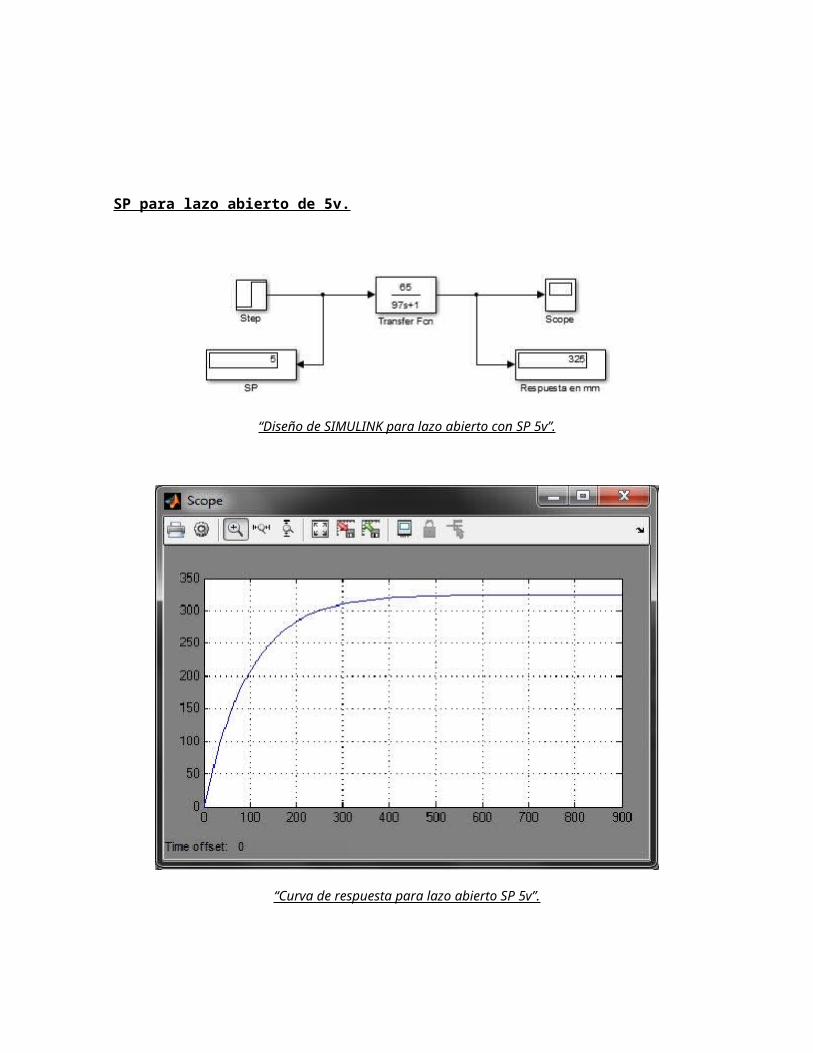
SP para lazo abierto de 5v.
“Diseño de SIMULINK para lazo abierto con SP 5v”.
“Curva de respuesta para lazo abierto SP 5v”.
Lazo Cerrado
“Diseño de SIMULINK para lazo cerrado con SP max”.
“Curva de respuesta para lazo cerrado SP máximo”.
SP para lazo cerrado de 2v.
“Diseño de SIMULINK para lazo cerrado con SP 2v”.
“Curva de respuesta para lazo cerrado SP 2v”.

SP para lazo cerrado de 5v.
“Diseño de SIMULINK para lazo cerrado con SP 5v”.
“Curva de respuesta para lazo cerrado SP 5v”.

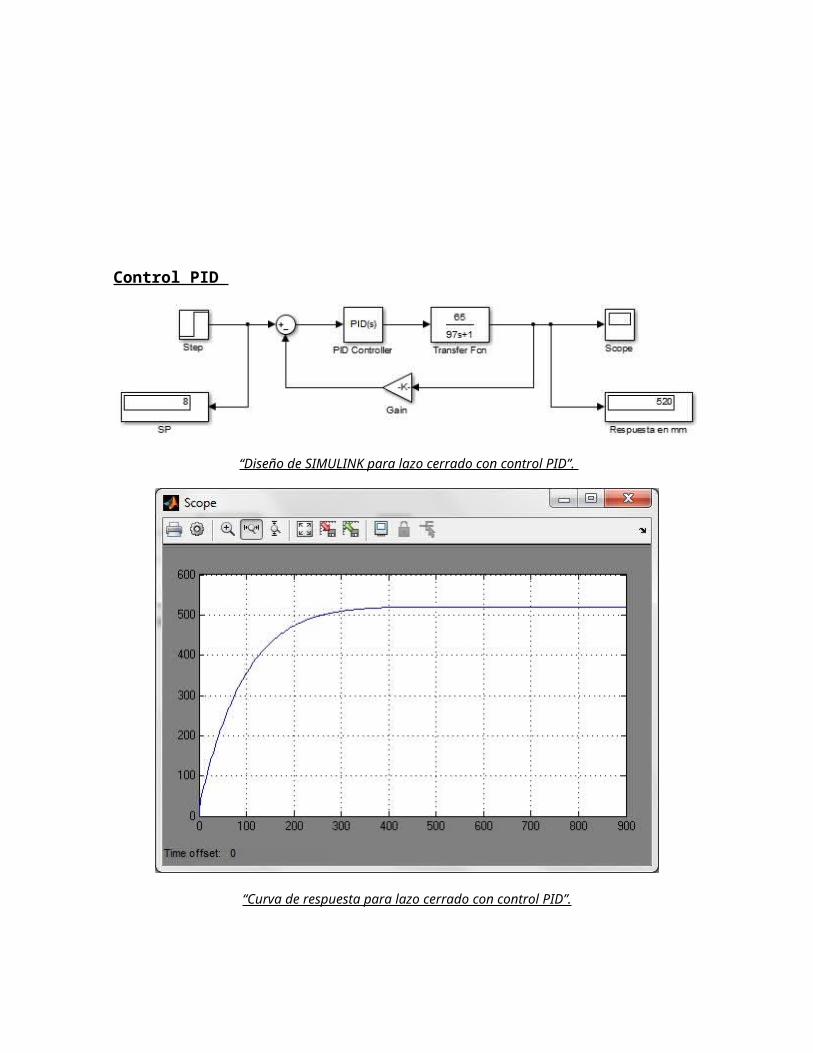
Control PID
“Diseño de SIMULINK para lazo cerrado con control PID”.
“Curva de respuesta para lazo cerrado con control PID”.
“Valores para la sintonización del bloque de control PID”.

Control PI
“Diseño de SIMULINK para lazo cerrado con control PI”.
“Curva de respuesta para lazo cerrado con control PI”.
“Valores para la sintonización del bloque de control PI”.
Control PD
“Diseño de SIMULINK para lazo cerrado con control PD”.
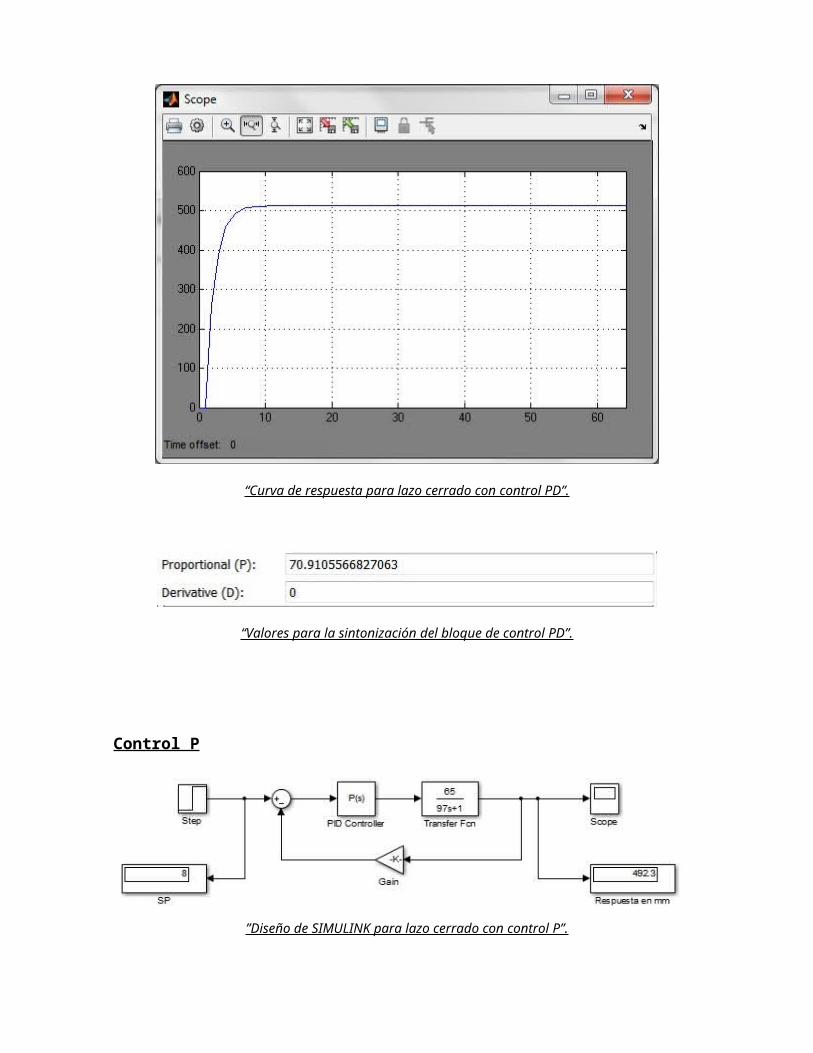
“Curva de respuesta para lazo cerrado con control PD”.
“Valores para la sintonización del bloque de control PD”.

Control P
”Diseño de SIMULINK para lazo cerrado con control P”.
“Curva de respuesta para lazo cerrado con control P”.
“Valores para la sintonización del bloque de control P”.

Control I
Diseño de SIMULINK para lazo cerrado con control I.
“Curva de respuesta para lazo cerrado con control I”.
“Valores para la sintonización del bloque de control I”.
Conclusiones
Según el esquema y la curva de respuesta para el lazo abierto, el sistema solo actúa en el proceso
sobre la señal de entrada (8v) y da como resultado una señal de salida (520mm) independiente a la
señal de entrada, pero basada en la primera. Esto significa que no hay retroalimentación hacia el
controlador para que éste pueda ajustar la acción de control.
A diferencia del lazo abierto, en el lazo cerrado la acción de control está en función de la señal de
salida, los sistemas de circuito cerrado usa la retroalimentación desde un resultado final para
ajustar la acción de control.
Como consecuencia de utilizar el lazo cerrado, la respuesta de la planta se redujo
considerablemente a un 50% en comparación al lazo cerrado, aun con su SP máximo no logramos
corregir la salida de la planta solo con el lazo cerrado, para que con su SP máximo (8v)
obtengamos el máximo de la planta (520mm), solo obtuvimos como respuesta 260mm con el SP
máximo de la planta, para corregir esto utilizamos bloques de control PID.
El controlador PID, permitió mejorar la respuesta del sistema, de manera óptima a lo que
requeríamos, llegando a tener un error nulo, para ello fue necesario conocer la función de
transferencia de la planta y así obtener los paramentos del controlador PID observando los la
respuesta del controlador del sistema.
La respuesta de un regulador PI será la suma de las respuestas debidas a un control proporcional
P, que detecta casi instantáneamente la señal, y con un cierto retardo entrará en acción el control
integrativa I, que será la encargada de corregir totalmente la señal, debido a ello se puede observar
en la curva del respuesta del controlador PI que se estabiliza según el requerimiento , en este caso
el máximo de la planta 520mm y no reduce la señal de salida , como se puede apreciar con el lazo
cerrado propiamente tal.

En el controlador PD, al actuar conjuntamente un controlador proporcional y un controlador
derivativo, se provoca una apreciable mejora en la velocidad de respuesta del sistema, aunque
pierde precisión en la salida obteniendo con un SP máximo solo 512.7mm , al ser la derivada de
una constante igual a cero, el control derivativo no ejerce ningún efecto, siendo únicamente
práctico en aquellos casos que se requiera estabilizar algún proceso cuya respuesta sea
extremadamente lenta y no requiera un nivel de precisión considerable.
Teóricamente, con el controlador P, si la señal es cero, también lo será la salida del controlador, la
respuesta, en teoría es instantánea, con lo cual el tiempo no intervendría en el control, pero en la
práctica, no ocurrió esto, la variación de la señal de entrada fue muy rápida y el controlador no
pudo seguir dicha variación presentando una trayectoria prácticamente exponencial hasta alcanzar
la señal requerida , presentando un error que fue incapaz de compensar siendo 492,3mm su
máximo alcanzado para un SP máximo de 8v.
El controlador integrativo presenta una respuesta inicial demasiado lenta, el controlador solo fue
efectivo hasta haber transcurrido un cierto tiempo, pero se puede apreciar comparando la curva de
respuesta con la del controlador P que intenta anular el error en la salida que presenta ,
mencionando que no lo anula en un 100% sigue resultando más preciso al momento de controlar la
respuesta de la planta , pero mucho mas lento.