Para mascotas domesticas
14
para mascotas domesticas en rehabilitación o con perdida de funcionalidad de extremidades Prototipo de movilidad asistida José Luis Danton Garrido A. Ingeniería Civil Biomédica [email protected]
-
Upload
jose-luis-garrido-arriagada -
Category
Education
-
view
405 -
download
0
Transcript of Para mascotas domesticas

para mascotas domesticas en rehabilitación o con perdida de funcionalidad de extremidades
Prototipo de movilidad asistida
José Luis Danton Garrido A.Ingeniería Civil Biomédica
Sin duda se cree que el gran porcentaje de los chilenos poseen mascotas.
La empresa AC Nielsen realizo un estudio sobre la penetración que tienen los animales domésticos en los hogares del país durante los años 2003-2004.
Diagnóstico
El estudio reveló que casi 6 de cada 10 familias del país (57,6%) tienen una mascota.
El animal doméstico más popular con presencia en el 46,5% de los hogares fue el perro, seguido por el gato con un 18,2%.

Lamentablemente estas mascotas son propensas a accidentes que les puedan provocar la invalides o en casos poco frecuentes nacen sin todas sus extremidades.
Ejemplo clásico son los accidentes automovilísticos
Diagnóstico
Según las últimas estadísticas, más de 70% de los traumatismos y lesiones sufridos por los perros.

Permite la creación de un prototipo para aumentar los resultados en las terapias de rehabilitación que sufren algunas mascotas (perros) frente a traumatismos causados ya sea por accidente, vejez o enfermedades degenerativas por lo que han perdido la movilidad de sus extremidades, lo que impide de gran manera su movilidad y autonomía.
Objetivo General

Incrementar la efectividad frente a tratamientos de fracturas causados por grandes traumatismos, los que generalmente requieren reposo absoluto por prolongados periodos de tiempo, lo cual por su naturaleza es difícil de obtener, el prototipo permitiría a la mascota desplazarse en su hogar y mantener aun el reposo que requiere.
Crear un sensor de direccionamiento que permita controlar el desplazamiento de la mascota a través de los movimientos de los músculos de su cuello e implementarlo a una base que sustenta al animal y lo desplaza a través de un motor eléctrico y ruedas.
Para las mascotas con tetraplejia permitiría su desplazamiento en espacios lisos con superficies firmes, como lo puede ser el jardín y las habitaciones de la casa de sus dueños, entregándoles mayor autonomía y con ello aumentar su calidad de vida.
Objetivos Específicos

Interés en la red

Prototipo
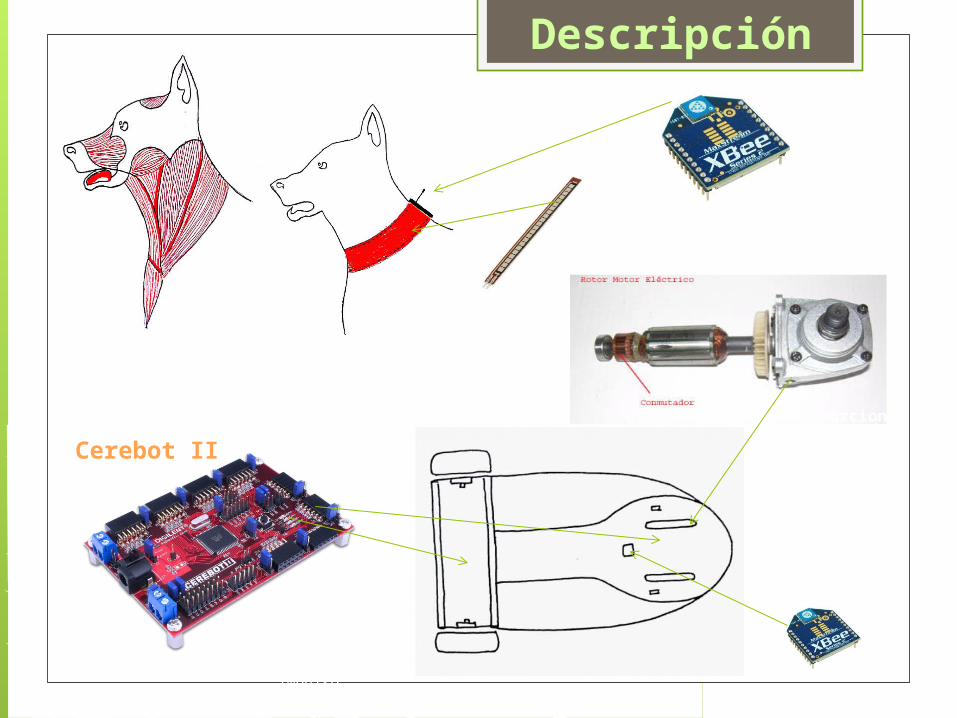
Descripción
Cerebot II
Procesa las señales del collar para proporcionar dirección e impulso
Dispositivo comunicación inalámbrica
Collar de sensores de flexión
Proporciona la fuerza para movimiento

Situación actual
Nir Shalom 2011
PrótesisExtremidades
traseras

Situación actual
PrótesisExtremidades
delanteras

Situación actual
CIRUGÍA
Reposo absoluto enjaulado
Ventajas
Primer prototipo pensado en la rehabilitación y movilización.
Cumple una mejor condición para el estresante periodo de rehabilitación que puede durar mas de un mes.
Permite libertad de movimiento en espacios controlados, con la ventaja de no utilizar los músculos en recuperación.
Pensado en mascotas con discapacidad mayor a 2 extremidades.
Entrega autonomía a la mascota durante su periodo de rehabilitación, mejorando su animo permitiendo una recuperación mas rápida.

Beneficiarios directos, usuarios (mascotas).
Prototipo esta pensado para ocuparse en primera instancia como alternativa de rehabilitación en centros o clínicas veterinarias.
Es alternativa para mascotas con discapacidad completa o superior a dos extremidades para entregarles mayor autonomía y con ello mejorar su calidad de vida en sus hogares.
Masificar el uso de este tipo de ayuda para las mascotas y con ello disminuir la eutanasia.
Impacto

Gracias
Fin