Optimizacion GA
38
54 CAPÍTULO 3 Algoritmos Genéticos 3.1 Introducción Existen diversas técnicas de optimización que han sido desarrolladas para buscar la optimalidad de una función. Sin embargo, se conoce una gran variedad de problemas que no se pueden solucionar de manera exacta debido a su complejidad. El tiempo de ejecución de cualquier algoritmo preciso para la solución de estos problemas depende del tipo de problema, llegando a tener un tiempo de solución exponencial en algunos casos. Los métodos convencionales que utilizan el conocimiento del problema reducen la complejidad del mismo para algunos casos particulares utilizando herramientas heurísticas. El conocimiento del problema mejora en parte el proceso de su ejecución, pero la complejidad del problema mismo es fija por lo que los esfuerzos son aún insuficientes y la solución que se logra no es precisa. Por consiguiente, se requieren de otras técnicas que brinden mejores resultados para solucionar problemas de gran complejidad. Los métodos evolutivos constituyen uno de estos métodos usados para la búsqueda de las soluciones óptimas mediante algún proceso de búsqueda aleatoria. Una característica relevante de los métodos evolutivos es que buscan soluciones sin tener conocimiento previo del problema. Los métodos evolutivos también son conocidos como métodos heurísticos y tienen como ventaja el reducir los inconvenientes que se presentan al usar las técnicas convencionales de optimización debido a que utilizan un espacio de búsqueda generado aleatoriamente. En este trabajo se analiza y se aplica el algoritmo genético como un método evolutivo para resolver el problema de la coordinación de estabilizadores y el mejoramiento de la seguridad en los sistemas de potencia. 3.1.1 Resumen de las técnicas evolutivas. En 1957, el experto en estadística inglés George E. P. Box propuso un enfoque evolutivo para la optimización de la producción industrial denominado EVOP (Evolutionary Operation por sus siglas en inglés) [1]. Este enfoque consiste en realizar pequeñas modificaciones a los parámetros de un proceso de producción censando datos en forma aleatoria para dirigir la búsqueda. Box mostró que el método propuesto por él era similar al proceso de selección natural a pesar de que sus ideas no se formularon en la forma de programas de computadoras.
-
Upload
lucardo-montreuil-jean -
Category
Documents
-
view
250 -
download
1
description
disfrutalo
Transcript of Optimizacion GA
-
54
CAPTULO 3
Algoritmos Genticos 3.1 Introduccin
Existen diversas tcnicas de optimizacin que han sido desarrolladas para buscar la optimalidad de una funcin. Sin embargo, se conoce una gran variedad de problemas que no se pueden solucionar de manera exacta debido a su complejidad. El tiempo de ejecucin de cualquier algoritmo preciso para la solucin de estos problemas depende del tipo de problema, llegando a tener un tiempo de solucin exponencial en algunos casos. Los mtodos convencionales que ut ilizan el conocimiento del problema reducen la complejidad del mismo para algunos casos particulares utilizando herramientas heursticas. El conocimiento del problema mejora en parte el proceso de su ejecucin, pero la complejidad del problema mismo es fija por lo que los esfuerzos son an insuficientes y la solucin que se logra no es precisa. Por consiguiente, se requieren de otras tcnicas que brinden mejores resultados para solucionar problemas de gran complejidad. Los mtodos evolutivos constituyen uno de estos mtodos usados para la bsqueda de las soluciones ptimas mediante algn proceso de bsqueda aleatoria. Una caracterstica relevante de los mtodos evolutivos es que buscan soluciones sin tener conocimiento previo del problema. Los mtodos evolutivos tambin son conocidos como mtodos heursticos y tienen como ventaja el reducir los inconvenientes que se presentan al usar las tcnicas convencionales de optimizacin debido a que utilizan un espacio de bsqueda generado aleatoriamente.
En este trabajo se analiza y se aplica el algoritmo gentico como un mtodo evolutivo
para resolver el problema de la coordinacin de estabilizadores y el mejoramiento de la seguridad en los sistemas de potencia.
3.1.1 Resumen de las tcnicas evolutivas. En 1957, el experto en estadstica ingls George E. P. Box propuso un enfoque
evolutivo para la optimizacin de la produccin industrial denominado EVOP (Evolutionary Operation por sus siglas en ingls) [1]. Este enfoque consiste en realizar pequeas modificaciones a los parmetros de un proceso de produccin censando datos en forma aleatoria para dirigir la bsqueda. Box mostr que el mtodo propuesto por l era similar al proceso de seleccin natural a pesar de que sus ideas no se formularon en la forma de programas de computadoras.
-
55
En 1959, R. M. Friedberg public los primeros trabajos sobre tcnicas evolutivas aplicados mediante programas en computadora. No obstante que Friedberg no usa el trmino evolutivo, es evidente que se fue el verdadero enfoque que adopt en su artculo original. Su trabajo consisti en generar un conjunto de instrucciones en lenguaje de mquina y en programacin automtica usando las computadoras [2].
George J. Friedman fue uno de los primeros en proponer la aplicacin de las tcnicas
evolutivas al rea de la robtica; en su trabajo de maestra, l propuso evolucionar circuitos de control nombrando a esta tcnica como retroalimentacin selectiva siendo similar a lo que actualmente se le conoce como redes neuronales. El trabajo de Friedman ha sido considerado como el principio de la robtica evolutiva, rea donde se intenta aplicar tcnicas evolutivas para planeacin de movimientos, control, transporte, produccin, etc. [3].
En 1961, Hans Joachim Bremermann aplic la evolucin como un proceso de
optimizacin numrica; asimismo, realiz las primeras simulaciones de la evolucin mediante el uso de cadenas binarias teniendo como fundamento la reproduccin, seleccin y mutacin, siendo as, un pionero de los algoritmos genticos [4].
Posterior a esos trabajos, se formaron las tres corrientes ms importantes en el rea de
los mtodos evolutivos:
En 1965, en Alemania se desarrollaron las estrategias evolutivas para solucionar problemas hidroneumticos de gran complejidad, presentados por I. Rochenberg y Schwefel. Las estrategias evolutivas no utilizan la recombinacin; tienen su origen en el rea de la optimizacin numrica [5].
En 1966, Lawrence J. Fogel present la programacin evolutiva modelando la
inteligencia como un comportamiento adaptativo. La programacin evolutiva tiene aplicaciones en diversas reas como la inteligencia artificial, la programacin automtica y la optimizacin numrica. Este mtodo enfatiza la relacin de comportamiento entre padres y descendientes y no utiliza operadores genticos [6].
En 1967, John H. Holland implement el algoritmo gentico que ha servido de
referencia para muchos investigadores. El algoritmo gentico usa seleccin probabilstica al igual que la programacin evolutiva, mientras que las estrategias evolutivas usan seleccin determinstica. El algoritmo gentico comenz usando la representacin binaria para codificar las
soluciones a un problema, evolucionando el genotipo y no el fenotipo como en la programacin evolutiva o las estrategias evolutivas. El operador principal en el algoritmo gentico es el cruzamiento, mientras que en la programacin evolutiva ste no existe y en las estrategias evolutivas se emplea como un operador secundario.
-
56
En este captulo se describe un algoritmo gentico cons iderando dos etapas: en la primera no se consideran restricciones de ningn tipo, y en la segunda se incluyen algunas restricciones. El captulo est organizado de la forma siguiente: en la seccin 3.1 se describen los avances de los mtodos evolutivos para optimizacin. La seccin 3.2 describe la metodologa del algoritmo gentico sin restricciones y sus ventajas comparadas con las tcnicas convencionales; se presentan ejemplos de aplicacin. En la seccin 3.3 se describe el algoritmo gentico considerando la solucin de problemas con restricciones, y sus diferentes enfoques de solucin. La seccin 3.4 se presenta la metodologa propuesta para la coordinacin eficiente y robusta e estabilizadotes, as como el diagrama de flujo correspondiente. En la seccin 3.5 se ilustra un ejemplo de aplicacin a una red elctrica con caractersticas reales. En la seccin 3.6 se propone la inclusin de restricciones de seguridad dinmica en el algoritmo del trabajo. Finalmente, la seccin 3.7 brinda un breve resumen acerca de este captulo.
3.2 Descripcin de los Algoritmos Genticos Los algoritmos genticos se fundamentan en una analoga con el proceso de la
evolucin natural investigada por G. Johann Mendel a principios del siglo XIX, su trabajo se bas en el estudio de la herencia gentica, esto es, la transmisin de caractersticas especficas de padres a sus descendientes; sin embargo, estos resultados se obtuvieron mediante el anlisis de una sola especie. Posterior a Mendel, Charles Darwin present en 1859 sus ideas sobre la evolucin en su trabajo titulado The Origin of Species. Darwin afirmaba que la supervivencia de una especie depende del grado de adaptacin en el ambiente en que habita; de no adaptarse, las especies se extinguirn a largo plazo. Con las ideas de Darwin, se concluy que la evolucin de una especie se realiza mediante unos procesos, que son: reproduccin (es la habilidad de transmitir ciertas caractersticas por herencia a los descendientes), recombinacin de caractersticas de los padres a los descendientes, mutacin (se considera como una pequea modificacin del patrn hereditario), y la seleccin de los individuos ms fuertes. Consecuentemente, Darwin concluy que solamente sobreviven los individuos que estn mejor adaptados a su ambiente. El grado de adaptacin al ambiente se le denomina aptitud; mientras ms alta sea la aptitud de un individuo, tendr ms probabilidad de sobrevivir.
Basado de manera estricta en las leyes de la naturaleza y tomando como base las
aportaciones hechas por Darwin, John Holland de la Universidad de Michigan present formalmente los algoritmos genticos en 1966, para estudiar procesos lgicos involucrados en la adaptacin [3]. Denominados originalmente como planes reproductivos genticos se les conoci posteriormente como algoritmos genticos. Los algoritmos genticos fueron inicialmente concebidos en el contexto del aprendizaje de mquina, pero en la actualidad se ha convertido en una tcnica muy popular para la solucin de problemas de optimizacin [8].
Los AG son tcnicas de bsqueda globales, aleatorias y estn basados en la mecnica
de la seleccin natural y en la gentica natural [9]. Fueron desarrollados para permitir identificar mltiples soluciones ptimas a problemas difciles tales como funciones de
-
57
optimizacin e inteligencia artificial. En un AG, las soluciones representadas por estructuras de datos llamadas individuos son evolucionadas y una nueva poblacin de individuos es creada. A cada individuo se le asigna un valor o aptitud mediante el cual se compara con otros individuos de la misma poblacin. Los algoritmos genticos han sido desarrollados para resolver problemas lineales y no lineales, explorando todas las regiones del espacio de bsqueda a travs de la mutacin, cruzamiento y la seleccin, operaciones aplicadas a los individuos de una poblacin [10, 11].
El algoritmo bsico es el siguiente. a) Generar aleatoriamente una poblacin inicial.
b) Calcular la aptitud de cada individuo.
c) Seleccionar (probabilsticamente) basndose en la aptitud. d) Aplicar operadores genticos (cruza y mutacin) para generar la siguiente
poblacin.
e) Repetir el proceso hasta que cierta condicin se cumpla.
El algoritmo gentico utiliza la seleccin probabilstica y no determinstica. Requiere
de la determinacin de cinco puntos fundamentales: 1) La representacin del individuo.
2) Una forma de crear una poblacin inicial de posibles soluciones (generalmente, un proceso aleatorio).
3) Una funcin de evaluacin que juegue el papel del ambiente, clasificando las
soluciones en trminos de su aptitud.
4) Operadores genticos que alteren la composicin de los descendientes que se producirn para las siguientes generaciones.
5) Valores para los diferentes parmetros que utiliza el algoritmo gentico (tamao
de la poblacin, probabilidad de cruza, probabilidad de mutacin, nmero mximo de generaciones, etc.).
3.2.1 Representacin del individuo
Cualquier algoritmo gentico requiere la representacin de un cromosoma para
describir a cada individuo en la poblacin de inters. Esta representacin es el primer problema que se presenta al disear e implementar un algoritmo gentico; la representacin determina cmo se estructura el problema en el algoritmo; asimismo, determina qu operadores genticos pueden ser usados.
-
58
Cada individuo o cromosoma se forma por una secuencia de genes. Existen muchas formas de estructurar un cromosoma dependiendo del problema a resolver, entre las que se encuentran: los dgitos binarios (0, 1); nmeros de punto flotante; enteros; smbolos (A, B, C, D); matrices; etc. El alfabeto original desarrollado y usado por Holland fue el alfabeto de dgitos binarios [10]. Posteriormente, al evolucionar el algoritmo gentico se encontr que una representacin til de un individuo o cromosoma para funciones de optimizacin involucra genes o variables de un alfabeto de nmeros de punto flotante con valores de variables acotados superior e inferiormente.
Michalewicz [10] ha concluido de sus numerosos experimentos comparando
algoritmos genticos con representacin en valores reales y binarios, que los algoritmos con valores reales son ms eficientes en trminos de tiempo de simulacin en una computadora; adems, que el uso de este tipo de representaciones ofrece resultados ms precisos y ms consistentes [12]. En este trabajo se usa la representacin en valores reales.
3.2.2 Funcin de Inicio, Evaluacin y Terminacin. El algoritmo gentico debe iniciar a partir de un conjunto de individuos o soluciones
potenciales agrupados dentro de una poblacin. Esta poblacin inicial se genera normalmente de forma aleatoria. La poblacin inicial puede ser creada mediante la seleccin directa de soluciones potencialmente buenas y el resto de la poblacin generada de manera aleatoria. El algoritmo gentico se mueve de generacin en generacin, creando y seleccionando descendientes hasta que el criterio de terminacin es satisfecho.
La evaluacin puede ser usada en el AG de muchas maneras; la funcin se considera
como un estado y es independiente del AG. La evaluacin se lleva a cabo calculando la aptitud de un individuo a partir del genotipo (el cromosoma del individuo).
El criterio de terminacin del algoritmo gentico se puede realizar de diferentes
maneras, normalmente el ms comn es un lmite de iteraciones o generaciones. El algoritmo puede terminar debido a una falla o a un mejoramiento en la mejor solucin sobre un nmero determinado de generaciones. Otro de los criterios utilizados se basa en el progreso del algoritmo. Si no se calcula un individuo mejor en las ltimas x generaciones el proceso termina y se concluye que el algoritmo convergi.
3.2.3 Funcin de Seleccin La seleccin de individuos para producir generaciones sucesivas es una parte
fundamental e importante de un algoritmo gentico. En el algoritmo se desarrolla una seleccin probabilstica con base en la aptitud de cada individuo; en consecuencia, el individuo que tiene la ms alta aptitud tiene mayor probabilidad de ser seleccionado para ser transmitido a la siguiente generacin. De esta forma, un individuo en la poblacin tiene la posibilidad de ser seleccionado ms de una ocasin as como el de reproducirse en la siguiente generacin.
-
59
Existen diferentes tcnicas para el proceso de seleccin, de las cuales se pueden mencionar:
a) La seleccin por rango. En este proceso son eliminados todos los cromosomas
que tienen una aptitud menor a un valor deseado. b) La seleccin de estado estable. La mayora de los cromosomas con aptitud
superior permanecen en la poblacin y los descendientes de estos sustituyen a los menos aptos.
c) Seleccin por torneo. Mediante esta tcnica, se organizan torneos entre los
individuos donde gana el cromosoma con la aptitud ms alta entre todos los participantes y ste se transmite directamente a la siguiente generacin.
d) Seleccin por elitismo. Los mejores cromosomas son incluidos directamente en
la nueva poblacin.
e) La ruleta de seleccin. A los mejores cromosomas se les asigna una oportunidad proporcional a su aptitud de ser seleccionados.
Este ltimo mtodo de seleccin es el ms usado en los algoritmos genticos y se
emplea tambin en el desarrollo de ste trabajo. En la ruleta se encuentran ubicados todos los cromosomas de la poblacin y se les asigna una superficie mayor o menor dependiendo de su valor o grado de adaptacin, este esquema se muestra en la Fig. 3.1.
Figura 3.1. Seleccin mediante la ruleta
El proceso de seleccin mediante el uso de la ruleta es como sigue. El tamao de los
sectores corresponde a los valores esperados e(ci) de los individuos. Se considera un indicador para conocer el sector de donde se obtienen los individuos que son seleccionados para transmitirse a la siguiente generacin. Naturalmente, el indicador se detiene con mayor probabilidad en los sectores ms grandes.
El algoritmo de muestreo de la rueda de la ruleta se realiza como se describe a
continuacin:
-
60
a) Para cada individuo ci se calcula la suma acumulada de los valores esperados e(ck) para obtener los lmites entre los distintos sectores,
( )=
=i
kki ceq
0
(3.1)
b) Se genera un nmero aleatorio r [0, N], (N es la suma de todos los valores esperados).
c) Si el valor calculado qi r el individuo ci es seleccionado. De lo contrario, se
transmite el individuo ci con qi-1 < r qi, i 2. En otras palabras, el algoritmo se repite a travs de los individuos de la poblacin sumando los valores esperados hasta que la suma sea mayor o igual al valor de r.
d) El individuo que haga que esta suma exceda el lmite, es el que se selecciona
para retransmitirse a la siguiente generacin.
3.2.4 Operadores genticos Los operadores genticos proporcionan el mecanismo bsico de bsqueda de los
algoritmos genticos. Los operadores son utilizados para crear nuevas soluciones basndose en las soluciones existentes en la poblacin. Existen bsicamente dos tipos de operadores: recombinacin y mutacin.
En el proceso de recombinacin a partir de dos individuos conocidos de la poblacin se producen nuevos individuos sustituyendo a los anteriores. Cada individuo participa en la recombinacin con una probabilidad Pxover. Esta es una diferencia del algoritmo gentico con la naturaleza ya que en el ambiente natural, la probabilidad de recombinacin de un individuo depende de su aptitud. Entre las formas de recombinacin de dos individuos se encuentran: cruzamiento de un punto, cruzamiento de dos puntos, cruzamiento multipuntos y cruzamiento uniforme. En este trabajo se utiliza el cruzamiento de un solo punto; este tipo de cruzamiento se lleva a cabo seleccionando un punto en cada individuo y uniendo las partes separadas con el otro individuo para formar dos nuevos descendientes.
La mutacin es el proceso de modificar la estructura de un individuo para producir
uno nuevo, que reemplaza al individuo original si el nuevo individuo resulta mejor. Las formas de realizar la mutacin de un individuo se clasifican como: a) mutacin estndar; b) inversin de cada bit entre las posiciones determinadas al azar; c) inversin total de los cromosomas. La mutacin se aplica a cada bit del genoma con una determinada probabilidad designada como Pmut. Generalmente se tiene Pmut < 1.
3.2.5 Seleccin de valores de los parmetros del AG.
A pesar de las ventajas que ofrecen la aplicacin de los operadores del algoritmo
gentico, como la representacin o los operadores de seleccin y muestreo, hay otros
-
61
factores que afectan el desempeo del algoritmo gentico de manera significativa; entre estos factores se encuentran:
i) El tamao de la poblacin seleccionada.
ii) La probabilidad de recombinacin.
iii) La probabilidad de mutacin. Sin embargo, no existe una teora general que se aplique para la seleccin ptima de
los valores de estos parmetros. El conocimiento desarrollado en esta rea es totalmente heurstico; los valores se proponen basndose en la experiencia desarrollada en el manejo del algoritmo gentico y del conocimiento del problema especfico. En [10], Michalewicz comenta en referencia a esta problemtica que: parece que la bsqueda de buenos valores para los parmetros del algoritmo gentico es ms arte que ciencia. Los parmetros influyen en el proceso del algoritmo gentico como se describe a continuacin.
i) El tamao de la poblacin
El tamao de la poblacin indica la cantidad de cromosomas que existen en la
poblacin (en cada generacin). Si hay pocos cromosomas, el algoritmo tiene poca probabilidad de realizar el cruzamiento exitoso y slo una pequea parte del espacio de bsqueda ser explorado. Por el contrario, si en la poblacin hay muchos cromosomas, el tiempo que emplea el algoritmo es mayor y ms lenta es la convergencia. Por lo tanto, el tamao N de la poblacin influye de manera particular en la velocidad y en el tiempo de ejecucin del algoritmo gentico. En este proceso se debe seleccionar un tamao de la poblacin adecuado para evitar una convergencia inadecuada.
ii) La probabilidad del cruzamiento Pover
La probabilidad del cruzamiento en el algoritmo gentico es un parmetro que
establece la frecuencia en que se realiza la cruza entre los cromosomas. Si no se aplica el cruzamiento entre los cromosomas, los descendientes que se obtengan sern copias exactas de los padres; con el cruzamiento, los nuevos individuos contendrn informacin gentica de sus respectivos padres.
As como el tamao de la poblacin influye en el tiempo de convergencia del
programa, tambin influye la probabilidad de la recombinacin. Si Pover es muy pequeo, resultan pocos individuos nuevos como producto de la recombinacin y el programa requerir de mayor tiempo de ejecucin para encontrar las mejores soluciones. Posteriormente, si la probabilidad Pover es muy grande casi todos los individuos se seleccionan por recombinacin, lo que implica que por lo regular no se queden en la poblacin los nuevos individuos, y sus descendientes tendran un valor demasiado cercano a los individuos de la poblacin inicial. Por lo tanto, la seleccin no tendra mucho efecto prctico. El rango de valores tpicos utilizados para la recombinacin se encuentra entre 0.2 y 0.8.
-
62
iii) La probabilidad de mutacin Pmut Este parmetro del algoritmo gentico es un parmetro que muestra la frecuencia de
mutacin de los cromosomas. Si no existe mutacin entre los cromosomas, stos son considerados sin cambio alguno despus del cruzamiento, pero si la mutacin es aplicada, parte del cromosoma es modificado. La mutacin se consider inicialmente como un operador apoyado en la recombinacin como sucede en la naturaleza y por ello en el pasado no se le dio la importancia que ahora tiene. En la actualidad, los algoritmos genticos no se pueden construir sin la mutacin si se desea un rendimiento alto. Existen programas basados solamente en los dos operadores, cruzamiento y mutacin, y los resultados son eficientes como lo muestran las estrategias evolutivas [7]. El valor de la probabilidad influye tambin en el tiempo de desarrollo del programa, por lo que se precisa una probabilidad adecuada para evitar resultados errneos en el algoritmo gentico. En [11] se propone una regla para determinar el valor adecuado de la probabilidad Pmut. Este valor se obtiene aplicando la siguiente frmula:
Pmut = 1/n (3.2)
donde n es la longitud de la representacin. Un diagrama de flujo general del procedimiento del algoritmo gentico se muestra en la Fig. 3.2.
Genera una poblacin inicial
Evala cada individuo de acuerdo a su funcin de
aptitud
No
Salida de resultados
Selecciona individuos. La probabilidad de seleccin de cada individuo es
proporcional a su aptitud
Considera en forma aleatoria un par de individuos como padres, aplica cruzamiento
en el par para generar dos descendientes
Podrn mutar un nmero pequeo de individuos en la poblacin de descendientes
Reemplaza a todos los individuos de la generacin anterior con los descendientes
obtenidos a travs de la seleccin, cruzamiento y mutacin
el criterio de seleccin es encontrado?
Si
Figura 3.2. Diagrama de flujo del algoritmo gentico
-
63
3.2.6 Aplicaciones del algoritmo gentico. Entre las aplicaciones de los algoritmos genticos se pueden mencionar: Optimizacin (estructural, de topologa, numrica, combinatoria, etc.).
Aprendizaje de mquina (sistemas clasificadores).
Bases de datos (optimizacin de consultas).
Reconocimiento de patrones (por ejemplo, imgenes).
Planeacin de movimientos de robots.
Economa.
Ecologa.
Prediccin.
Recientemente, el autor lo ha aplicado en la coordinacin de estabilizadores en sistemas de potencia.
Esta lista no es completa pero da una idea de las clases de problemas en que son
aplicados los algoritmos genticos tanto para solucionar un problema como para ser aplicado en un contexto cientfico. Motivados por el xito del algoritmo gentico en stas y en otras reas, este mtodo ha tenido un crecimiento importante en los ltimos aos en diversas disciplinas.
3.2.7 Diferencias importantes del algoritmo gentico con tcnicas tradicionales.
Los algoritmos tradicionales para resolver funciones de optimizacin generalmente presentan resultados excelentes cuando se utilizan con funciones regulares convexas. Sin embargo, muchas funciones son multimodales, discontinuas y no-diferenciables. El mtodo de muestreo estocstico ha sido usado para optimizar estas funciones, mientras que las tcnicas de bsqueda tradicionales usan caractersticas del problema para determinar el siguiente punto de muestreo (ej. Gradientes, Hessianas, linealidad y continuidad); la tcnica de bsqueda estocstica no hace tales consideraciones. Por lo tanto, los puntos de muestreo estn determinados por reglas de decisin estocstica en lugar de un conjunto de reglas determinsticas.
Los algoritmos genticos han sido usados para resolver problemas de difcil solucin
con funciones objetivo que no poseen propiedades agradables, tales como funciones continuas, diferenciables, satisfaccin de la condicin de Lipschitz, etc. [8]. Algunas de las diferencias entre el algoritmo evolutivo y las tcnicas tradicionales de bsqueda y optimizacin se mencionan a continuacin.
-
64
1) El algoritmo evolutivo usa una poblacin de soluciones potenciales en vez de una sola; esto es, pueden identificar mltiples soluciones ptimas, hacindolo menos sensible a quedar atrapado en mnimos/mximos locales.
2) Los AG pueden ser usados en situaciones de optimizacin dinmica. 3) La tcnica evolutiva usa operadores probabilsticos, mientras que las tcnicas
tradicionales utilizan operadores determinsticos. 4) Son robustos en el sentido de que son aplicables a una gran variedad de
problemas, con una pequea o sin modificacin de la tcnica. 5) Los AG pueden manejar todos los espacios de bsqueda, incluyendo espacios
no-suaves, multimodales y discontinuos.
3.2.8 Ejemplos de optimizacin [8].
En esta seccin se ejemplifica la solucin de dos funciones objetivo, mostrando los resultados obtenidos.
a) Ejemplo 3.1. Maximizar la funcin objetivo 110 += )x*(sin*x)x(f p .
Para la solucin del problema se aplica el AG; como se mencion en la seccin anterior, se aplican las siguientes funciones:
1) Una representacin binaria,
2) Un inicio, la funcin de evaluacin y el criterio de terminacin,
3) Seleccin y muestreo
4) Operadores genticos
Representacin de los individuos. Los individuos se representan por cadenas de bits y
cada una es un gen del cromosoma. En este ejemplo se considera un intervalo de [-1, 2]. Este intervalo se representa por un conjunto de valores finitos que se obtienen aplicando la expresin:
r2log (3.3)
siendo r el espacio de bsqueda definido para el conjunto de valores. En este ejemplo se considera una representacin del intervalo en 3,000,000 puntos. Por lo tanto, se tiene
[log2 3*106] = [21.516531] 22 bits
-
65
El nmero de bits obtenidos indica la longitud del gen. La solucin del problema se encuentra analizando todo el espacio de bsqueda, enfocndose en una regin con resultados satisfactorios.
Inicializacin, evaluacin y criterio de terminacin. En este paso, se crea una
poblacin inicial, distribuyendo uniformemente a los individuos sobre el espacio de bsqueda. (Si se tiene conocimiento de la estructura del espacio de la bsqueda, resulta muy til inicializar la primera poblacin dentro de una regin con valores satisfactorios). Para la evaluacin, considerando que la aptitud siempre se calcula mediante el fenotipo, se requiere la transformacin del genotipo. La funcin utilizada es,
))(())(( 21 cifcif (3.4)
donde i representa al individuo, c al genotipo y f(i(c)) es la transformacin a la aptitud. La funcin evaluacin se propone como,
eval(c) = f(i(c)) (3.5)
Por ejemplo, evaluando un valor de genotipo de (0.637197) en la funcin evaluacin se obtiene f(0.637197) = 1.586345. Los resultados de este ejemplo se muestran en la Tabla 3.1.
Tabla 3.1 Aptitud obtenida del ejemplo 3.1
Generacin Genotipo Fenotipo
1 0.8678 1.7356
2 0.8543 1.846426
12 1.8768 2.250367
18 33 1.8544 2.836877
34 1.851505 2.849436
35 39 1.851503 2.849438
El mejor valor
1.8496
2.8494
Como se puede observar en la Tabla 3.1, un valor aceptable de la aptitud se obtiene a
partir de la generacin 34, por lo que el criterio de terminacin para reducir el tiempo de solucin depende de los requerimientos del problema y del operador del algoritmo.
El criterio de evaluacin se considera normalmente como el lmite de generaciones o
del tiempo de ejecucin del algoritmo. Esto es, el proceso del AG se termina si no se produce un individuo mejor en las ltimas x generaciones. En este ejemplo, se consideran 50 generaciones como el criterio de terminacin con 50 individuos por
-
66
generacin. En la primera generacin se obtiene un genotipo de 0.8678 y un fenotipo de 1.7356 que es la mejor solucin encontrada.
Seleccin y muestreo. Seleccin es la determinacin de la probabilidad con la cual un
individuo es seleccionado considerando el valor de su aptitud. Esta seleccin se realiza usando la seleccin proporcional de Holland dada por,
=
=N
kk
ii
)c(eval
)c(evalP
1
(3.6)
El muestreo se realiza aplicando la rueda de la ruleta para seleccionar los individuos
que se van a transmitir en la siguiente generacin. Operadores genticos. Se aplican los operadores de mutacin y recombinacin para
obtener un nivel de aptitud de los individuos aceptables. Se emplea un valor de recombinacin de Pover = 0.25 y de mutacin Pmut = 0.01.
Las Figs. 3.3-3.4 muestran grficamente la mejor solucin que se obtiene en este
ejemplo as como la comparacin entre la aptitud calculada y el nmero de generaciones.
-1 - 0 . 5 0 0.5 1 1.5 2-1
- 0 . 5
0
0.5
1
1.5
2
2.5
3
G E N O T I P O
F
E
N
O
T
I P
O
f ( x ) = x * s i n ( 1 0 p i * x ) + 1
E l m e j o r v a l o r e n c o n t r a d o
Figura 3.3. Grfica de la mejor solucin del ejemplo 3.1
-
67
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 5 01.6
1 .8
2
2.2
2 .4
2 .6
2 .8
3
G E N E R A C I O N E S
A
P
T
I T
U
D
A p t i t u d v s . G e n e r a c i n
Figura 3.4. Grfica comparativa de la aptitud obtenida
La parte sombreada de la fig.3.4 muestra que a partir de la generacin nmero 34 la
aptitud calculada se puede considerar como aceptable para terminar con el algoritmo y reducir el tiempo de clculo del algoritmo.
b) Ejemplo 3.2. En este ejemplo se considera la maximizacin de la siguiente funcin
)4cos(*7)5(*10)( xxsinxxf ++= , dentro del intervalo [0, 9]. Se realiza el mismo procedimiento que en el ejemplo 3.1. El nmero de generaciones consideradas fueron 25. Los resultados obtenidos se muestran en la Tabla 3.2 y en las Figs. 3.5 y 3.6.
Tabla 3.2 Aptitud obtenida del ejemplo 3.2
Generacin Genotipo Fenotipo
1 8.0217 20.1903
2 - 3 8.0148 20.55138
4 - 6 7.8002 24.27073
7 7.8077 24.42119
8 - 9 7.832 24.74463
10 11 7.849 24.84576
12 - 15 7.85697 24.85531
16 - 24 7.85698 24.85536
El mejor valor 7.8570 24.8554
-
68
0 1 2 3 4 5 6 7 8 9- 2 0
- 1 5
- 1 0
-5
0
5
1 0
1 5
2 0
2 5
x = G E N O T I P O
f(x
) =
F E
N O
T I
P O
f ( x ) = 5 + 1 0 s e n ( 5 x ) + 7 c o s ( 4 x )
E l m e j o r v a l o r
Figura 3.5. Grfica de la mejor solucin del ejemplo 3.2
0 5 1 0 1 5 2 0 2 52 0
20 .5
2 1
21 .5
2 2
22 .5
2 3
23 .5
2 4
24 .5
2 5
G E N E R A C I O N E S
A P
T I
T U
D
A p t i t u d v s G e n e r a c i n
Figura 3.6. Grfica del comportamiento de la aptitud
De los resultados mostrados en la Tabla 3.2 y como se puede observar en la Fig. 3.6, un valor aceptable de la aptitud se obtiene a partir de la generacin 12. Sin embargo, aqu
-
69
se considera que un mejor valor puede tenerse a partir de la generacin 16. Como se mencion anteriormente, el criterio para terminacin del proceso depende entonces del usuario y de la precisin que se desee obtener.
3.3 Manejo de restricciones.
Hasta ahora se ha descrito la metodologa del algoritmo gentico aplicado a problemas sin restricciones. Sin embargo, en la prctica generalmente se tienen problemas con restricciones de diferentes tipos (igualdad, desigualdad, lineales y no lineales) de la forma:
min f(z) (3.7)
sujeto a :
hi (z) c i = 1, 2, . . ., n El algoritmo gentico es una herramienta de optimizacin que inicialmente se
desarroll sin la inclusin de restricciones; por consiguiente, se requiere disear un mecanismo que permita la inclusin de la informacin adecuada sobre las violaciones de las restricciones en la funcin de aptitud.
Existen diferentes tcnicas para tratar problemas con restricciones [13-16]. En la prctica se pueden encontrar problemas muy complejos de optimizacin con restricciones; por ejemplo, el problema del agente viajero es de esta clase de problemas, la restriccin para este problema es que el viaje tiene que ser en un solo ciclo visitando todas las ciudades. Otro ejemplo es el de empacar la mochila, con una restriccin solamente con todas las combinaciones posibles de objetos que se pueden meter en la mochila; sin embargo, a causa de la cantidad de objetos no se puede calcular la aptitud para todas las posibles soluciones viables. Estos problemas se tratarn en detalle ms adelante.
3.3.1 Antecedentes [13, 17].
Una breve revisin de la evolucin de las tcnicas desarrolladas para resolver la optimizacin de problemas con restricciones es presentada en [13, 17, 18, 19, 20]. En los ltimos aos han sido desarrolladas diversas tcnicas para el manejo de restricciones mediante los algoritmos evolutivos, principalmente en el rea de los algoritmos genticos. Las tcnicas desarrolladas se pueden clasificar en cuatro tipos:
1) Tcnicas que rechazan a los individuos no factibles.
2) Tcnicas que mantienen una poblacin factible mediante el uso de
operadores genticos especiales.
3) Tcnicas que separan los objetivos y las restricciones.
4) Tcnicas que penalizan a los individuos infactibles.
-
70
Quiz la forma ms fcil de tratar con las restricciones es la primera tcnica, rechazando a los individuos que no estn considerados como factibles. Cuando alguna solucin viola una restriccin, la aptitud asignada es de cero, y no se requieren clculos posteriores para estimar el grado de infactibilidad de dicha solucin. Esta tcnica se puede usar cuando los espacios de bsqueda son convexos.
Diversas representaciones para problemas de optimizacin fueron desarrolladas por
Davis, las cuales preservan la factibilidad del individuo. Otro de los ejemplos del uso de este tipo de tcnicas es el algoritmo desarrollado por Michalewicz, el GENOCOP ( Genetic Algorithm for Numerical Optimization for Constrained Problems por sus siglas en ingls) [10]. Este algoritmo maneja restricciones lineales suprimiendo las desigualdades y diseando operadores genticos especiales con la finalidad de mantener a todos los individuos dentro de la regin de soluciones restringidas. El algoritmo GENOCOP funciona mediante una poblacin inicial factible; debido a que se basa en la suposicin de manejar restricciones lineales, su espacio de bsqueda es convexo.
Entre las tcnicas que separan los objetivos y las restricciones se puede mencionar la
desarrollada por Paredis que se basa en un modelo co-evolutivo [18]; este modelo trabaja con ms de una poblacin y la aptitud de un individuo (en una poblacin) depende directamente de la forma de evolucin de otra poblacin. El fundamento de esta tcnica es que una poblacin de soluciones co-evoluciona con una poblacin de restricciones.
Otra de las tcnicas para tratar problemas con restricciones es la propuesta por
Schoenauer y Xanthakis llamada behavioural memory en donde las restricciones tienen un orden de manejo en particular [13]. Esta herramienta se fundamenta en que las restricciones deben de tratarse de una manera lineal con lo cual se busca modificar los resultados obtenidos mediante este algoritmo.
Otra herramienta de inters es aquella en que los objetivos y las restricciones se
manejan por separado. La forma ms comn es redefinir el problema de optimizar la funcin f (una funcin con un solo objetivo) en uno con mltiples objetivos (incluyendo las restricciones). De esta manera se tendrn m + 1 objetivos, siendo m el nmero de restricciones y el problema es resuelto usando una tcnica para funciones con mltiples objetivos.
Con el desarrollo de la tcnica llamada COMOGA, Surry y colegas [21] propusieron
la jerarquizacin de la poblacin considerando el grado de violacin de las restricciones; esto es, la cantidad de individuos en cada solucin. De esta manera, una parte de la poblacin es seleccionada tomando esta jerarqua y los dems individuos se seleccionan considerando su aptitud. Los resultados obtenidos con esta tcnica fueron satisfactorios comparados con un enfoque hecho con penalizaciones, aunque si bien fueron resultados buenos, no se puede decir que fueron mejores que los encontrados mediante una funcin de penalizacin. Este algoritmo requiere de parmetros adicionales, tales como una funcin de costo la cual sirve para regular la proporcin entre los individuos factibles y los no factibles quienes estarn siempre presentes en la poblacin.
-
71
Otra tcnica no tan comn es la propuesta por Hajela y Lee [22]. Esta tcnica debe su funcionamiento de manejo de restricciones a la manera natural de operar del sistema inmunolgico. El enfoque utilizado es la separacin de todos los individuos factibles de los no factibles en la poblacin. A los individuos factibles clasificados en un grupo se les llama antgenos y a los no factibles se les conoce como anticuerpos. La manera de realizar lo anterior es mediante el uso de una funcin sencilla de verificacin de patrones con lo cual se calcula adems la similitud entre dos cromosomas (si se trabaja una codificacin binaria, se realiza bit por bit o de manera general, gen por gen). De esta manera se co-evoluciona la poblacin de anticuerpos hasta volverlos muy similares a la poblacin de antgenos. Una vez que se llega a esa solucin, se combinan ambos grupos y se les evoluciona aplicando un algoritmo gentico estndar sin considerar una funcin de penalizacin debido a que todos los individuos ya se consideran factibles. A pesar de que con esta tcnica se tienen buenos resultados, se tiene el inconveniente de que no se conoce an cual es el efecto, en trminos de desempeo, de combinar diferentes proporciones de cada grupo de individuos; otro inconveniente es que tampoco se sabe qu hacer cuando no se tienen individuos factibles en la poblacin inicial.
La tcnica ms comn para el manejo de restricciones es la funcin de penalizacin; a
pesar de que se han propuesto varios enfoques para esta tcnica, la mayora conserva la idea original: incrementar el valor de la funcin objetivo cuando una o ms restricciones son violadas. A continuacin se describen algunas aportaciones presentadas en diversos trabajos de investigacin basadas en la solucin de problemas con restricciones mediante la tcnica de la penalizacin [8, 10, 13, 17, 19, 20].
Homaifar y colegas [23] presentaron una metodologa en donde se definen diferentes
niveles de violacin de las restricciones y se especifica un coeficiente de penalizacin para cada nivel, de manera que la penalizacin se incrementa si el nivel de penalizacin es mayor. La desventaja principal de este mtodo es que se requiere un nmero considerable de parmetros de acuerdo a las restricciones; por ejemplo, para p restricciones se requieren un total de p(2n + 1) parmetros, donde n es el nmero de niveles especificados en el problema. Esto es, si se analiza un problema pequeo con 6 restricciones y 3 niveles de penalizacin se requeriran 42 parmetros, lo que complica el problema.
Joines y Houck [24] propusieron una tcnica fundamentada en el uso de factores de
penalizaciones dinmicas, esto es, que cambian con el tiempo. La desventaja en esta tcnica es que en la prctica, es difcil obtener una funcin de variacin de la penalizacin.
Michalewicz y Attia [25] basaron su mtodo en el algoritmo del templado simulado,
en este mtodo se modifican los coeficientes de penalizacin cada cierto nmero de generaciones una vez que el algoritmo ha convergido a un ptimo local. Bsicamente, el proceso funciona de la siguiente manera. En cada iteracin, el algoritmo considera nicamente las restricciones violadas y la presin sobre las soluciones infactibles es incrementada debido a los valores decrecientes de la temperatura del proceso. En esta metodologa, la poblacin inicial es creada con las copias de un mismo individuo que satisface todas las restricciones lineales. La temperatura es disminuida en cada iteracin del proceso para crear una nueva poblacin basada en la mejor solucin encontrada en el paso
-
72
anterior; el proceso termina cuando se llega a una temperatura preestablecida. La principal desventaja de esta tcnica es que generalmente no es posible seleccionar en forma adecuada y precisa un esquema de enfriamiento cuando se resuelve cualquier problema utilizando el algoritmo del templado simulado.
Adeli y Cheng [26] usaron un algoritmo gentico hbrido de una funcin de
penalizacin con un mtodo de programacin matemtica que utilizaron en un trabajo de optimizacin anterior. Esta tcnica est basada en el uso de los multiplicadores de Lagrange; tiene como inconveniente que los multiplicadores de Lagrange no se pueden definir de manera sencilla para cualquier tipo problema.
Le Riche y colegas [27] propusieron un algoritmo gentico que utiliza dos parmetros
de penalizacin para cada restriccin. La idea de esta metodologa es lograr un balance entre los factores de penalizacin mediante dos subpoblaciones de individuos; la poblacin inicial se subdivide en dos grupos con la finalidad de combinarlos para mezclar a los individuos factibles y no factibles. La clase de seleccin que es utilizada en este proceso es de jerarquizacin lineal para reducir la posibilidad de una convergencia prematura. El inconveniente que tiene esta tcnica es que no se tiene una manera precisa para elegir los factores de penalizacin adecuados para cada una de las subpoblaciones.
3.3.2 Funciones de penalizacin [3, 8-10, 13, 17, 19-20]. En un mtodo de penalizacin, un problema con restricciones se transforma en un
problema sin restricciones asocindole una funcin de costo o bien, una funcin penalizada que incluya todas las restricciones violadas. Este costo es incluido en la evaluacin de la funcin objetivo. En esta seccin se describe la clasificacin de los mtodos de penalizacin mencionando algunas de sus ventajas y sus principales inconvenientes.
Considrese un sistema con restricciones de la forma natural (ec.3.7):
min f(z)
sujeto a: hi(z) c i = 1, 2, . . ., n
Se transforma a la forma sin restricciones:
min f(z) + ( )[ ]=
fn
ii zhk
1
(3.8)
donde f es la funcin de penalizacin y k es el factor de penalizacin definido por el usuario. Existen diferentes formas de penalizar a un individuo de acuerdo a la violacin de las restricciones; algunas de ellas son:
-
73
se le penaliza si no es factible, sin considerar si se encuentra cercano a la regin factible.
se puede tomar el valor de la infactibilidad del individuo para considerar el factor de
penalizacin. se puede utilizar una funcin de costo para volver factible al individuo.
Algunas de las tcnicas propuestas que usan una func in de penalizacin para la solucin de problemas con restricciones se dividen en:
1) Penalizacin esttica. 2) Penalizacin dinmica. 3) Penalizacin usando el recocido simulado. 4) Penalizacin adaptiva. 5) Algoritmo gentico segregado. 6) Pena de muerte.
3.3.2.1 Penalizacin esttica.
En esta tcnica propuesta por A. Homaifar, Y. Lai y X. Qi [23], el usuario define diferentes niveles de violacin de restricciones y selecciona un coeficiente de penalizacin para cada nivel de violacin; de esta manera, el nivel de violacin se ir incrementando conforme la violacin de las restricciones sea mayor. El individuo es evaluado mediante su aptitud (ec. 3.8):
Aptitud = fi(z) + ( )=
n
jij,m zhk
1
(3.9)
donde k se ha definido como los coeficientes de penalizacin y m = 1, 2, . . . , l, siendo l los niveles de violacin definidos por el usuario, n el nmero total de restricciones y fi(z) la funcin objetivo sin penalizaciones.
La desventaja de utilizar este mtodo es que se requieren n(2l + 1) parmetros siendo n el nmero de restricciones, y l el nmero de niveles de violacin. Por consiguiente, an para un problema con pocas restricciones y niveles, la cantidad de parmetros que resulta se incrementa, complicando la solucin del problema.
3.3.2.2 Penalizacin dinmica. Dentro de esta categora de penalizar una funcin que viole ciertas restricciones, se
puede encontrar el trabajo desarrollado por J. Joines y C. Houck [24]. En la penalizacin dinmica, los factores de penalizacin estn cambiando conforme evoluciona el algoritmo,
-
74
esto es, la funcin de penalizacin se incrementa conforme se incrementan las generaciones.
Los individuos son evaluados de acuerdo a su aptitud ms el factor de penalizacin cambiante en el tiempo. El inconveniente que presenta esta herramienta es que se corre el riesgo de una convergencia prematura si los valores de los parmetros no son seleccionados adecuadamente.
3.3.2.3 Penalizacin usando el algoritmo del templado simulado.
Esta tcnica propuesta por Michalewicz y colegas [25] utiliza como fundamento el algoritmo del templado simulado. La idea bsica es la modificacin de los coeficientes de penalizacin cada cierto nmero de generaciones para evitar que el algoritmo quede atrapado en un ptimo local. Los individuos son evaluados usando su valor de aptitud, ms una funcin que integra el esquema de enfriamiento definido por el usuario. El problema principal que se tiene con esta tcnica es la seleccin adecuada del esquema de enfriamiento.
3.3.2.4 Penalizacin adaptiva [28].
En esta tcnica las penalizaciones se modifican considerando una retroalimentacin del ambiente durante el proceso del algoritmo gentico. Cuando un individuo es consistentemente factible, la penalizacin disminuye; por el contrario, si resulta infactible el valor de la penalizacin se incrementa. Si los cambios son alternados, esto es, unas veces el individuo es factible y otras infactible la penalizacin permanece sin cambio. La desventaja de esta tcnica es que no se tiene una regla para definir el factor inicial de penalizacin y el intervalo de monitoreo de factibilidad para obtener resultados satisfactorios.
3.3.2.5 Penalizacin usando el algoritmo gentico segregado.
Esta tcnica fue propuesta por Le Riche y colaboradores [27] y se fundamenta en el uso de dos funciones de penalizacin en vez de una como las anteriores, separando la poblacin en dos poblaciones; esta funcin tiene la finalidad de ponderar las restricciones ms fuertes con las de menor valor. Cada una de las poblaciones se dividen a su vez en dos grupos de individuos siendo evaluados mediante un factor de penalizacin distinto; posteriormente, se seleccionan los mejores individuos en cada grupo de donde se obtienen los nuevos descendientes para formar la nueva generacin. De esta manera, se combinan los individuos factibles con los infactibles suponiendo el uso de un factor de penalizacin grande y otro pequeo con la finalidad de mantener la diversidad y as, evitar quedar atrapado en ptimos locales.
En esta metodologa la definicin de los factores de penalizacin de las dos poblaciones resulta en un inconveniente cuando no se tiene mucha informacin sobre el problema a resolver.
-
75
3.3.2.6 Pena de muerte.
La pena de muerte consiste en el rechazo de un individuo que no es factible y representa quiz la manera ms sencilla de resolver problemas con restricciones. El uso de esta tcnica se considera eficiente y prctica porque cuando una solucin viola alguna restriccin se le asigna un valor de aptitud cero; en consecuencia, ya no se requiere realizar ms clculo al respecto para estimar el grado de infactibilidad de dicha solucin. nicamente los valores de los individuos que son factibles son considerados para la solucin del problema [3, 13]. Como se mencion, esta tcnica de penalizar tiene como principal ventaja la disminucin en tiempo de cmputo al no tener que recalcular la funcin objetivo ni reparar a los individuos infactibles. Pero por el contrario, su desventaja radica en el hecho de que si en la poblacin inicial no se tiene algn individuo factible, entonces todos los individuos no tendrn un valor aceptable de aptitud ocasionando que el algoritmo de bsqueda no progrese.
En este trabajo, la inclusin de restricciones se hizo mediante la tcnica de
penalizacin esttica por ser la tcnica ms simple de implementar en el algoritmo. An as, los resultados de las aplicaciones presentadas en el captulo cuatro justifican tal inclusin.
3.4 Metodologa propuesta para sintonizar controles estabilizadores.
En esta seccin se describe la metodologa propuesta en este trabajo para solucionar el problema de coordinar la operacin de estabilizadores. Las ecuaciones dinmicas del sistema de potencia son ecuaciones complejas no lineales. Sin embargo, se pueden encontrar soluciones tiles cuando se tienen desviaciones pequeas alrededor de un punto de equilibrio en estado estable previamente seleccionado. Por lo tanto, en la solucin propuesta se inicia evaluando una versin linealizada del modelo del sistema de potencia alrededor de un punto de equilibrio. Esta linealizacin es generalmente descrita por las matrices {A, B, C}. Se asume que el modelo del sistema est compuesto de generadores, cargas y sistemas de excitacin. En forma adicional, se considera que se ha llevado a cabo un anlisis lineal completo del sistema (factores de participacin, ndices de controlabilidad y observabilidad). Por consiguiente, se pueden conocer los puntos donde los dispositivos PSS y FDS deben ser instalados, as como las seales ms adecuadas para la retroalimentacin [31-33]. Los controles suplementarios se disean y coordinan mediante el procedimiento propuesto enseguida.
3.4.1 Sensitividad de valores propios.
Como una herramienta importante, el anlisis de sensitividad de valores propios ha sido usado para estudios dinmicos en sistemas de potencia y en el diseo de controles. Se ha encontrado que las trayectorias de los valores propios dominantes para los cambios de parmetros del sistema son no- lineales, y las estimaciones de primer orden no son precisas por lo que es necesario considerar estimaciones de un orden mayor.
-
76
Un nuevo mtodo para el anlisis de sensitividad de valores propios de segundo orden ha sido propuesto en [34]. En esta formulacin, el anlisis de sensitividad de un modo en particular puede ser desarrollado solamente con sus valores propios izquierdos y derechos, y no se requiere la informacin de otros valores propios. El modelo linealizado para el anlisis de estabilidad de un sistema de potencia puede ser representado por la siguiente expresin:
uU
vx
YCBAx
G
GG D
+
DD
-
=
D00
& (3.10)
o en forma compacta uUxAx ~
~~~~ D+D=D & (3.11)
donde x es el vector de estados, v es el vector de los voltajes de nodos de la red, u es el vector de las variables de entradas de control, D indica los valores perturbados, A~ es la matriz de estado del sistema aumentado.
El valor propio il , el vector propio derecho iv y el vector propio izquierdo iw de la
matriz aumentada, se definen como
iii BvvA l=~ , iii
T BwwA l=~ (3.12)
La matriz B tiene valores de 1 en las primeras n entradas de la diagonal y 0 en las
otras posiciones, siendo n el nmero de variables de estado. Si se tienen cambios en los parmetros del sistema, stos se pueden representar por la matriz PA~ y la perturbacin se puede definir como AAE P ~~ -= . Las perturbaciones de los valores propios de primer y segundo orden se obtienen mediante [34].
iTii Evw=D
)1(l (3.13)
iTii vEw D=D
)2(l (3.14)
El vector ivD se calcula resolviendo en forma simultnea las ecuaciones
( ) ( )
0
~ )1(
=D
-D=D-
iTi
iiii
vBw
vEBvBA ll (3.15)
3.4.2 Funcin objetivo
En esta seccin se propone una funcin objetivo que se resuelve mediante un algoritmo gentico, con la finalidad de amortiguar las oscilaciones electromecnicas que aparecen en un sistema de potencia ante la presencia de perturbaciones. La funcin objetivo propuesta se define por la siguiente expresin:
-
77
{ } =
DK
k Zjk_jRemin
1l (3.16)
La perturbacin de los valores propios puede ser representada como una perturbacin
de segundo orden, esto es, )( k_j)(k_jk_j
21 lll D+D=D , y =Z { kj _l" de inters en la k-sima condicin de operacin}. Esto es, el objetivo es minimizar la parte real de la sensitividad de los modos de inters a travs de los mejores parmetros de los estabilizadores, considerando diferentes condiciones de operacin. Por lo tanto, resolviendo la ecuacin (3.16) se pueden obtener los parmetros de los estabilizadores capaces de incrementar el amortiguamiento de los modos de inters.
En este trabajo, la matriz de perturbacin E de las ecs. (3.13)-(3.14) se calcula
cambiando los parmetros de los estabilizadores a partir de un conjunto de parmetros tpicos. Los estabilizadores incluyen PSS actuando en los generadores sncronos y los FDS actuando a travs de dispositivos FACTS. Los estabilizadores que se consideran aqu tienen la relacin convencional de entrada/salida:
4
3
2
1
1
1
1
1
1)()(
sTsT
sTsT
sTskT
susy
++
++
+= (3.17)
que consiste de filtros lineales conectados en cascada. El primer trmino representa un filtro washout que sirve para eliminar seales a la salida del estabilizador del sistema de potencia el cual modificar el voltaje en terminales del generador. Esencialmente el washout acta como un filtro pasa-alta y debe dejar pasar todas las frecuencias que son de inters. El segundo trmino es un compensador dinmico con el filtro washout y es usado para mejorar el atraso de fase a travs del sistema.
Sin prdida de generalidad, se consideran en las simulaciones que T1 = T3 y T2 = T4 para simplificar el anlisis. Para cada estabilizador, se estimarn nicamente T1 y K, debido a que T y T2 se seleccionan previamente. T toma valores entre 7.5 - 15 s, y se elige para asegurar un cambio de fase despreciable para las frecuencias de oscilacin de inters. T2 toma valores entre 0.020-0.10 s, y se elige considerando una realizacin fsica [41]. Por lo tanto, para N estabilizadores, se estimarn 2N parmetros (N constantes de tiempo T1, y N ganancias K).
Es importante enfatizar que con ste procedimiento se obtienen los parmetros con los que se construyen estabilizadores robustos, capaces de operar satisfactoriamente sobre un amplio rango de condiciones de operacin del sistema. Para el problema abordado, robustez implica que los controles tengan un buen desempeo, en presencia de pequeas perturbaciones como variaciones en las cargas, y ante grandes perturbaciones como salidas de lneas de transmisin o corto circuito. La Fig. 3.7 describe el algoritmo desarrollado aplicando la metodologa propuesta.
-
78
F = 0
Condicin de operacin
Construir la matriz de estado aumentada usando los parmetros tpicos de los PSSs y del FDSs, ec (4.21)
Seleccionar Z = (Modos de inters) Conjunto de parmetros T2i & T i Genera una poblacin de parmetros [K1 T1_1; K2 T1_2 ; . . .; KN T1_N ] N = Nmero de estabilizadores, se considera como lmites: Kj_min Kj Kj_max T1j_min T1j T1j_max
Evaluar para cada una de: ( )1ilD Sensitividad de primer orden i Z ( )2ilD Sensitividad de segundo orden i Z
Ecs (4.24) (4.25)
F = F + Re (Dl i) i Z
Otros puntos de operacin
F min
Mutacin Cruzamiento ........
si
si
no
no
Fin
Figura3.7. Diagrama de flujo del mtodo propuesto
-
79
3.5 Ejemplo de aplicacin del algoritmo gentico incluyendo un dispositivo FACTS.
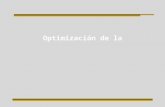
En esta seccin se presenta la aplicacin del AG sin restricciones a un sistema de potencia con caractersticas reales ( equivalente de la red mexicana). La Fig. 3.8 muestra el sistema analizado de potencia de 46-generadores; representa un equivalente de la red elctrica Mexicana la cual consiste de 46 generadores y 190 nodos. Un TCSC es instalado a la mitad de la lnea 174-181 y un UPFC es insertado entre la lnea 75-84.
Fig. 3.8. Sistema de potencia de 46 generadores
3.5.1 Modelo del generador
Se considera un el modelo transitorio del generador de cuarto orden el cual incluye un sistema de excitacin esttico dado por:
[ ]
( )[ ]
( )[ ]
( )[ ]VtVsVrefKEfdTdt
dEfd
iqqxxqdEqTdt
ddE
iddxxdEfdqEdTdt
qdE
DPPMdt
ddtd
AA
em
-++-=
-+-=
--+-=
D--=
-=
1
0
1
0
1
1
0
ww
wwd
(3.18)
-
80
Este sistema presenta dos modos electromecnicos de inters para las condiciones nominales de operacin (caso base) {-0.358 j6.147, -0.924 j6.101}, cuyo amortiguamiento se desea incrementar a travs de la accin coordinada de los 13 estabilizadores instalados en los generadores {1, 2, 3, 6, 15, 19, 24, 32, 33, 35, 36, 38 y 39}, un estabilizador TCSC y un UPFC. Estos modos incluyen interacciones entre los generadores en las regiones sur y este del sistema. Las seales de retroalimentacin empleadas son las siguientes: la velocidad para los estabilizadores de sistemas de potencia, el flujo de potencia activa de la lnea para los estabilizadores FACTS.
3.5.2 Caso base
Para los dispositivos FACTS y los generadores, se consideran los siguientes parmetros y condiciones en estado estable. El TCSC tiene una inductancia L = 92 mH y una capacitancia C = 44 mF, resultando en una reactancia capacitiva equivalente XTCSC = 0.1500 pu, cuando se tiene un ngulo de disparo a = 50.5. Las reactancias del transformador del UPFC son Xserie = Xparalelo = 0.010 pu, y regula el flujo de potencia en S75-84 = 0.5 + j0.5 con los siguientes valores: Vparelelo = 1.0385 p 0.5078 rad y Vserie = 0.0458 p 0.1788 rad. Todos los sistemas de excitacin estticos tienen parmetros KA = 75 y TA = 0.015 s. La seal de salida del estabilizador Vs es alimentada al sistema de excitacin de los generadores {1, 2, 3, 6, 15, 19, 24, 33, 35, 36, 38, 39}. 3.5.3 Bsqueda de robustez
Para el diseo de estabilizadores robustos se consideran diferentes condiciones de operacin considerando: a) El caso base mencionado anteriormente, b) La potencia real es incrementada 15%, Caso II, c) Se desconectan las lneas de transmisin 158-141 y 185-183, caso III y d) Se desconectan las lneas de transmisin 172-174 y 75-89, caso IV. Para los estabilizadores, las seales de retroalimentacin son las velocidades angulares wi (rad/s). Los lmites en los parmetros de las variables de los estabilizadores usados en ambos algoritmos son:
],2.0,02.0[pssK ],14.0,01.0[upfcK
],41,31[ -- eeKTCSC ],075.0,02.0[2 pssT (3.19)
]075.0,02.0[2 upfcT , ]075.0,02.0[2 TCSCT
3.5.4 Simulaciones
La estabilizacin robusta se obtiene de la accin coordinada de los estabilizadores, cuyos parmetros son estimados resolviendo la ec. (3.16) mediante el AG resultando las que se muestran en la Tabla 3.3.
-
81
Tabla 3.3 Parmetros de los estabilizadores (PSS y FACTS). Estabilizador k T T1 = T3 T2 = T4
PSS1 PSS2 PSS3 PSS6 PSS15 PSS19 PSS24 PSS32 PSS33 PSS35 PSS36 PSS38 PSS39
FDSupfc FDStcsc
0.077405 0.047769 0.027402 0.127127 0.080810 0.030692 0.171992 0.034948 0.054614 0.159305 0.129505 0.089906 0.100982 0.077266 0.000594
7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5
0.021781 0.021298 0.020000 0.027765 0.028804 0.020250 0.071712 0.052270 0.034987 0.021847 0.062312 0.074670 0.020981 0.039642 0.064887
0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.040 0.040
Las Figuras 3.9-3.13 describen el comportamiento no- lineal de algunas velocidades angulares wi, de las potencias elctricas reales Pei y de las posiciones de los rotores di y posterior a una falla trifsica repentina aplicada a los nodos 53, 59, 78 y/o 185, considerando las cuatro condiciones de operacin mencionadas anteriormente. El generador nmero 1 es tomado como referencia.
Figura 3.9. w2 posterior a una falla en el nodo 53
-
82
Figura 3.10. Pe5 posterior a una falla en el nodo 59
Figura 3.11. d19 posterior a una falla en el nodo 59
-
83
Figura 3.12. d21 posterior a una falla en el nodo 78
Figura 3.13. w5 posterior a una falla en el nodo 185
-
84
3.5.5 Discusin de resultados
La metodologa propuesta y aplicada en este ejemplo para mejorar el comportamiento de los sistemas de potencia multi-mquinas a travs de la coordinacin de los estabilizadores brinda un desempeo robusto y adecuado despus de pequeas y grandes perturbaciones donde se consideran diferentes condiciones de operacin. El ejemplo muestra la aplicabilidad de la coordinacin de estabilizadores analizando el comportamiento transitorio de algunas mquinas sncronas como se ilustra en las figuras presentadas. 3.6 Inclusin de restricciones de seguridad transitoria.
La rpida expansin de las dimensiones de los sistemas de potencia, aunado a los problemas asociados con tener una fuente confiable de energa, ha hecho de la seguridad del sistema un factor primario e importante en la operacin de los sistemas. La estabilidad transitoria trata con la respuesta de los mismos ante la presencia de disturbios. El periodo de inters es despus de la liberacin de la falla y se le conoce como el periodo de postfalla. En este intervalo, las oscilaciones electromecnicas tienen que ser amortiguadas tan pronto como sea posible, como un factor importante de la seguridad en los sistemas de potencia. Despus de liberar una perturbacin en un sistema de potencia, los modos que pueden aparecer pueden ser clasificados en dos principales grupos: modos local y modos inter-rea. Las oscilaciones pueden ocurrir debido a fluctuaciones de las cargas, salidas de generadores o de lneas de transmisin; pudiendo ocurrir en forma espontnea. Estas oscilaciones pueden decrecer lentamente y desaparecer o crecer causando la inestabilidad del sistema. Para un mejor desempeo del sistema, las oscilaciones deben ser removidas del sistema rpidamente. Con el crecimiento en la demanda de energa y la interconexin de grandes redes elctricas, las oscilaciones de baja frecuencia han llegado a ser uno de los principales problemas en su operacin, afectando la confiabilidad y la seguridad de las mismas. Un objetivo importante de la planeacin, diseo y operacin de un sistema elctrico de potencia es proporcionar la suficiente seguridad en el suministro de la potencia elctrica a los consumidores. Por lo tanto, la seguridad es uno de los criterios fundamentales en el diseo y el principal objetivo durante su operacin, bajo condiciones normales y perturbadas (cualquier condicin de operacin). En los sistemas de potencia, la estabilidad se refiere solamente a los estudios dinmicos de los sistemas, mientras que la seguridad incluye aspectos tanto estticos como dinmicos [35].
La estabilidad transitoria en un sistema se refiere a la habilidad de los generadores de
mantenerse en sincronismo a pesar de estar sujetos a grandes disturbios tales como fallas trifsicas o la desconexin de lneas. Por lo tanto, la linealizacin de los sistemas no puede ser aplicable y las ecuaciones no- lineales de los sistemas tienen que ser resueltas. Lo anterior complica el anlisis en forma considerable. El periodo de tiempo para el anlisis de estabilidad transitoria es unos cuantos segundos solamente debido a que la prdida de sincronismo puede ocurrir rpidamente en ese corto tiempo y originar que las posiciones angulares d de los rotores puedan incrementarse bajo la influencia de la potencia
-
85
acelerante, y el sistema de potencia llegue a ser inestable si d experimenta una excursin grande [36-37].
La seguridad en un sistema se mide por su capacidad de mantener un suministro de potencia en forma continua, an cuando detecte variaciones en la operacin. Estas variaciones pueden ser originadas por perturbaciones en el sistema. Para garantizar una seguridad y por consiguiente, una confiabilidad en la generacin, suministro y consumo de energa, los sistemas pueden involucrar arreglos complejos de dispositivos de control; estos controles pueden operar de manera directa en elementos individuales tales como generadores.
Conceptualmente, para el anlisis de la seguridad y un adecuado diseo de controles,
la operacin del sistema se puede clasificar en [38]: Condicin normal de operacin es cuando el sistema se encuentra operando dentro de un rango normal y seguro, capaz de eliminar cualquier contingencia pequea sin violar alguna restriccin de operacin. Posteriormente, el sistema entra al estado de alerta si el nivel de seguridad llega a una regin donde la posibilidad de una perturbacin se incrementa por las condiciones en que opera el sistema. En este estado, todas las variables del sistema se encuentran an dentro de un rango estable de operacin y se puede volver al estado normal disminuyendo la generacin, haciendo un re-despacho de cargas, entre otras acciones correctivas y/o preventivas; sin embargo, el sistema opera con seguridad dbil porque una contingencia puede causar un problema mayor y mover al sistema a un tercer estado llamado de emergencia si una perturbacin severa ocurre cuando el sistema se encuentra en estado de alerta, ocasionando que los voltajes de algunos nodos se vuelvan crticos o las cargas de equipos violen el rango de seguridad. En esta etapa, los controles pueden actuar, liberando la falla, operando el control de excitacin, liberando cargas o generadores, regresando al sistema al estado anterior. Si estas medidas correctivas no son aplicadas o los dispositivos fallan en su accin de control o son insuficientes, el sistema entra a la condicin de emergencia extrema. Esta condicin es ms crtica porque puede originar la salida de lneas de transmisin en cascada, y la posibilidad de prdidas importantes de reas de suministro en un sistema de potencia. Por lo tanto, un adecuado y eficiente diseo, sintonizacin, colocacin y coordinacin de los dispositivos de control son muy importantes para evitar la prdida de estabilidad del sistema. Una vez que los controles han operado, el sistema puede restaurar los elementos que han sido aislados del resto, las cargas pueden ser reconectadas y el sistema tiende a volver a una condicin estable de operacin. La Fig. 3.14 muestra de manera esquemtica las condiciones de operacin descritas.
-
86
Figura 3.14. Estados de operacin del sistema de potencia
Como se ha mencionado, la seguridad es de gran inters en la planeacin y diseo de los sistemas de potencia para mantenerlos siempre en condiciones seguras y estables de operacin. En consecuencia, los controles suplementarios y su adecuada coordinacin juegan un papel muy importante en trminos de seguridad y estabilidad del sistema.
En este trabajo, la inclusin de las consideraciones de seguridad para resolver el problema de la coordinacin de estabilizadores se realiza mediante restricciones de desigualdad. Una de las restricciones que se imponen a los sistemas de potencia es:
Restricciones de desplazamiento angular entre generadores. Estas acotan las
posiciones angulares de los rotores del sistema. Matemticamente, las restricciones se representan mediante:
( ) ( ) maxijji tt _ddd - (3.18)
1 i, j n, i j
donde di(t) es la i-sima posicin angular en el tiempo t; dij_max es la separacin mxima deseada entre el i-simo, el j-simo generador despus de una contingencia y n el nmero de generadores considerados para restringir su desplazamiento angular.
La inclusin de restricciones para la coordinacin de controles tiene el propsito de
considerar algunas condiciones de operacin que garanticen un comportamiento dinmico estable del sistema completo en la condicin de operacin de postfalla; en el algoritmo propuesto, la robustez es un factor de gran inters para su desarrollo. Es importante notar que mediante esta metodologa es posible seleccionar y estudiar diferentes localizaciones de fallas; la rutina de optimizacin se refiere al algoritmo aplicado para optimizar una funcin no- lineal sujeta a restricciones de tipo no- lineal [39-40].
La Fig. 3.15 muestra el diagrama de flujo del algoritmo propuesto donde se incluyen
las restricciones de desigualdad.
-
87
Figura 3.15. Diagrama de flujo del mtodo propuesto incluyendo restricciones angulares.
Datosxinicial
Nuevascondiciones deoperacin?
Rutina deMinimizacin
Evala larepresentacin
dinmicalinealizada
uBxAx D+D=D&
uBxAx D+D=D &
si
no
no
Calcula la Sensitividad desegundo orden de los
valores propios de inters( ) ( )21
jZj
j lD+lD=lD
xnueva xant
fin
si
Satisface el criterio?
f(x) = f(x) + Re (Dl)
Rutina de estabilidad transitoria
si
no
eval (x) =
( )
( )
+ maneraotrade(x)npenalizacixf
factiblees(x) sixf
penalizacin (x) > 0
penalizacin (x) = 0
" i, j de inters
di - dj dij_mx
-
88
3.7 Resumen
En este captulo se describe el algoritmo gentico, su estructura y su aplicabilidad como una herramienta interesante, eficiente y til para resolver problemas de optimizacin. En el algoritmo gentico se aplican la seleccin, la mutacin y el cruzamiento como operadores principales a una serie de generaciones para crear nuevas generaciones de descendientes con la finalidad de mejorar la aptitud de los individuos.
Los algoritmos genticos trabajan a partir de una poblacin inicial de soluciones posibles en contraste con otras tcnicas convencionales que trabajan con soluciones sencillas; de esta manera, el mtodo reduce la posibilidad de quedar atrapado en un punto ptimo local. Los algoritmos genticos (AGs) han surgido como una herramienta prometedora para la solucin de problemas de optimizacin; son robustos en el sentido de que son aplicables a una gran variedad de problemas con una pequea o ninguna modificacin de la tcnica. Asimismo, pueden manejar todos los espacios de bsqueda, incluyendo espacios discontinuos y funciones no-suaves, pueden identificar mltiples soluciones ptimas y ser usados adems, en situaciones de optimizacin dinmica. En artculos recientes, los AGs han sido aplicados al problema de la coordinacin de los Estabilizadores de Sistemas de Potencia (PSS) y los dispositivos estabilizadores FACTS (FDS). Los resultados han sido exitosos y confirman el potencial de los AGs para buscar los ajustes ptimos de los parmetros del PSS y FDS convencionales en sistemas de potencia [29-30]. Los algoritmos genticos son algoritmos atractivos y prometedores para la solucin de problemas de optimizacin. Se presenta el desarrollo de la metodologa propuesta para resolver el problema de la coordinacin de controles en un sistema multimquinas de potencia. Los controles utilizados en este trabajo son los estabilizadores de sistemas de potencia (PSS), y dispositivos estabilizadores FACTS por su versatilidad para ayudar a amortiguar oscilaciones de origen electromecnico.
Como parte importante de la metodologa, se propone la inclusin de restricciones de
seguridad que se realiza de manera particular en forma de restricciones de desigualdad, con la finalidad de acotar las excursiones angulares de los rotores de los generadores, el flujo transitorio de postfalla de lneas y la apertura angular ent re nodos, contribuyendo con esto a incrementar las probabilidades de conservar el sincronismo despus de disturbios severos. Referencias [1] Box, G. E. P., Evolutionary Operation: A method for increasing industrial productivity.
Journal of the Royal Statistical Society, Vol. 6, No. 2, Pp.81-101, 1957. [2] Friedberg, R., A learning machine I. IBM Journal of Research and Development, Vol.
2, No. 1, 1958. [3] Carlos A. Coello Coello, Introduccin a la computacin evolutiva. Notas de curso,
Cinvestav-IPN, 2001.
-
89
[4] Bremermann, H. J., Optimization through evolution and recombination. In Self-organizing systems, M. C. Yovits, G. T. Jacobi, and G. D. Goldstein, Eds. Spartan Books, Washington, D. C., Pp. 93-106, 1962.
[5] Thomas Back., Evolutionary Algorithms in Theory and Practice. Oxford University
Press, New York, 1996. [6] Lawrence J. Fogel., Artificial Intelligence through Simulated Evolution. Forty Years of
Evolutionary programming. John Wiley & Sons, Inc., New York, 1995. [7] Melanie Mitchel, An Introduction to Genetic Algorithms. A Bradford Book, The MIT
Press, Cambridge, Massachusetts, London, England, Fifth Printing, 1999. [8] M. Gen and R. Cheng, Genetic Algorithms & Engineering Design. John Wiley & Sons,
Inc. 1997. [9] D. E. Goldberg, Genetic Algorithms in Search, Optimization, and Machine Learning.
Addison-Wesley, 1989. [10] Michalewicz, Z., Genetic Algorithms + Data Structures = Genetic Programs. Third
Edition, Springer Verlag, 1996. [11] Back, T, Evolutionary Algorithms in Theory and Practice. Oxford University Press,
1995. [12] Christopher R. Houck, Jeffery, A. Joines and Michael G. Kay A Genetic Algorithm for
Function Optimization: A Matlab Implementation Report. North Carolina State University, Pp. 1-14.
[13] Zbigniew Michalewicz, A Survey of Constraint Handling Techniques in Evolutionary
Computation Methods. Proceedings of the Fourth Annual Conference on Evolutionary Programming, Pp. 135-155, 1995.
[14] Zbigniew Michalewicz, and Schoenauer, M., Boundary Operators for Constrained
Parameter Optimization problems. Proceedings of the Seventh International Conference on Genetic Algorithms, Pp. 320-329, 1997.
[15] Richard Y. K. Fung, Jiafa Tang and Dingwei Wang, Extension of a Hybrid Genetic
Algorithm for nonlinear programming problems with equality and inequality constraints. Computers & Operations Research, Vol. 29, Pp. 261-274, 2002.
[16] Chen Zhong and Fei Pusheng, A Parallel Algorithm for Constrained Optimization
Problems. Journal of Computational and Applied Mathematics, Vol. 61, Pp. 225-230, 1995.
[17] Carlos A., Coello Coello, Theoretical and Numerical Constraint-Handling Techniques
used with Evolutionary Algorithms: A Survey of the State of the Art. Computer Methods in Applied Mechanics and Engineering, Vol. 191, No. 11-12, Pp.1245-1287, January-2002.
-
90
[18] J. Paredis, Co-evolutionary Constraint Satisfaction. Proceedings of the Third Conference on Parallel Problem Solving from Nature, Springer-Verlag, New York, Pp. 46-55, 1994.
[19] Carlos A., Coello Coello, Use of Self-Adaptive Penalty Approach for Engineering
Optimization Problems. Computer in Industry, Vol. 41, No. 2, Pp.113-117, Jan., 2000. [20] Carlos A., Coello Coello, Treating Constraints as Objective for Single -Objective
Evolutionary Optimization. Engineering Optimization, Vol. 32, No. 3, Pp.275-308, Feb. 2000.
[21] Patrick D. Surry, Nicholas J. Radcliffe, and Ian D. Boyd., A Multi-Objective Approach
to Constrained Optimization of Gas Supply Networks: The COMOGA Method. Evolutionary Computing, AISB Workshop, Lecture Notes in Computer Science, Springer Verlag, 1995.
[22] P. Hajela and J. Lee., Constrained Genetic Search via Schema Adaptation. An Immune
Network Solution. Proceedings of the First World Congress of Structural asnd Multidisciplinary Optimization, Germany, Pp. 915-920, 1995.
[23] A. Homaifar, S. H. Y. Lai and X. Qi, Constrained Optimization via Genetic Algorithms.
Simulation, Vol. 62, No. 4, Pp. 242-254, 1994. [24] J. Joines and C. Houck, On the Use of Non-Stationary Penalty Functions to Solve
Nonlinear Constrained Optimization Problems with Gas. Proceedings of the First IEEE Conference on Evolutionary Computation, IEEE Press, Orlando Florida, Pp. 579-584, 1994.
[25] Zbigniew Michalewicz, and N. Attia., Evolutionary Optimization of Constrained
Problems. Proceedings of the Third Annual Conference on Evolutionary Programming, Pp. 98-108, 1994.
[26] Hojjat Adeli and Nai-Tsang Cheng, Augmented Lagrangian Genetic Algorithm for
Structural Optimization. Journal of Aerospace Engineering, Vol. 7, No. 1, Pp. 104-118, January, 1994.
[27] R. Le Riche, C. Knopf-Leonoir and R. T. Haftka, A Segregated Genetic Algorithm for
Constrained Structural Optimization. Proceedings of the Sixth International Conference on Genetic Algorithms, San Mateo California, Pp. 558-565, 1995.
[28] James C. Bean, Genetic and Random Keys for Sequencing and Optimization. ORSA
Journal on Computing, Vol. 6, No. 2, Pp.154-160, 1994. [29] A. L. B. Do Bomfim, G. N. Taranto and D. M. Falcao Simultaneous Tunning of Power
System Damping Controllers Using Genetic Algorithm, IEEE Transaction on Power Systems, Vol. 15, No. 1, Pp. 163-169, February 2000.
[30] G. N. Taranto and D. M. Falcao. Robust decentralized control design using genetic
algorithm in power system damping control. IEE Proc.- Gener. Transm. Distrib., Vol. 145, No. 1, Pp. 1-6, Jan. 1998.
-
91
[31] Ixtlhuatl Coronado, Ubicacin de Dispositivos FACTS desde una Perspectiva
Dinmica. Tesis de Maestra, Cinvestav-IPN Unidad Guadalajara, Septiembre, 2001. [32] H. F. Wang, F. J. Swift and M. Li, Selection of Installing Locations and Feedback
Signals of FACTS-Based Stabilizers in Multimachine Power Systems by Reduced-Order modal Analysis. Proc. IEEE, 144, (3), pp.263-269, 1997.
[33] W. I. Fang, and H. W. Ngan, Optimizing Location of Unified Power Flow Controllers
Using the Method of Augmented Lagrange Multipliers. IEEE Proc.-Gener. Transm. Distrib., Vol. 146, No. 5, Sept. 1999.
[34] H. K. Nam, Y. K. Kim, K. S. Shim, and K. Y. Lee, A New Eigen-Sensitivity Theory of
Augmented Matrix and its Application to Power System Stability Analysis. IEEE Transaction on Power Systems, Vol. 15, No. 1, Pp. 363-369, Feb. 2000.
[35] M. Pavella, D. Ernst, and D. Ruiz-Vega, Transient Stability of Power Systems: A Unified
Approach to Assessment and Control. Kluver Academic Publishers. 2000. [36] K. R. Padiyar, Power System Dynamics. Indian Institute of Science, Bangalore, John
Wiley and Sons (Asia) Pte Ltd, 1996. [37] Syed A. Nassar and F. C. Trutt, Electric Power Systems. CRC Press LLC, 1998.
[38] S. Kundur, Prabha, Power System Stability And Control. Mc Graw-Hill, Inc, 1994.
[39] Coleman, T. F. and Y. Li, An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds. SIAM Journal on Optimization, Vol. 6, Pp. 418-445, 1996.
[40] Coleman, T. F. and Y. Li, On the Convergence of Reflective Newton Methods for Large-
Scale Nonlinear Minimization Subject to Bounds. Mathematical Programming, Vol. 67, No. 2, Pp. 189-224, 1994.
[41] P. Kundur, M. Klein, G. J. Rogers and M. S. Zywno, Application of Power System
Stabilizers for Enhancement of Overall System Stability. IEEE Transactions on Power Systems, Vol. 4, May 1989, Pp. 614 626.