OPTIMIZACIÓN TOPOLÓGICA EN EL DISEÑO DE ELEMENTOS ...
68
OPTIMIZACIÓN TOPOLÓGICA EN EL DISEÑO DE ELEMENTOS ESTRUCTURALES MECÁNICOS CARLOS ALBERTO MEZA VALENCIA UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA DEPARTAMENTO DE ENERGÉTICA Y MECÁNICA PROGRAMA DE INGENIERÍA MECÁNICA SANTIAGO DE CALI 2012
Transcript of OPTIMIZACIÓN TOPOLÓGICA EN EL DISEÑO DE ELEMENTOS ...

OPTIMIZACIÓN TOPOLÓGICA EN EL DISEÑO DE ELEMENTOS ESTRUCTURALESMECÁNICOS
CARLOS ALBERTO MEZA VALENCIA
UNIVERSIDAD AUTÓNOMA DE OCCIDENTEFACULTAD DE INGENIERÍA
DEPARTAMENTO DE ENERGÉTICA Y MECÁNICAPROGRAMA DE INGENIERÍA MECÁNICA
SANTIAGO DE CALI2012
OPTIMIZACIÓN TOPOLÓGICA EN EL DISEÑO DE ELEMENTOS ESTRUCTURALESMECÁNICOS
CARLOS ALBERTO MEZA VALENCIA
Proyecto de grado para optar al título deIngeniero Mecánico
DirectorEDIGUER ENRIQUE FRANCO GUZMÁN
Doctor en Ciencias
UNIVERSIDAD AUTÓNOMA DE OCCIDENTEFACULTAD DE INGENIERÍA
DEPARTAMENTO DE ENERGÉTICA Y MECÁNICAPROGRAMA DE INGENIERÍA MECÁNICA
SANTIAGO DE CALI2012

Nota de aceptación:
Aprobado por el comité de Gradoen cumplimiento de los requisi-tos exigidos por la UniversidadAutónoma de Occidente para op-tar al título de ingeniero mecánico.
Ing. MAURICIO BARRERAJurado
Ing. EMERSON ESCOBARJurado
Santiago de Cali, 3 octubre de 2012
3
CONTENIDO
NOMENCLATURA 9
RESUMEN 10
INTRODUCCIÓN 12
1. OPTIMIZACIÓN TOPOLÓGICA 15
1.1 TIPOS DE OPTIMIZACIÓN 15
1.2 OPTIMIZACIÓN TOPOLÓGICA DE ESTRUCTURAS CONTINUAS 16
1.3 OPTIMIZACIÓN TOPOLÓGICA DE ESTRUCTURAS DISCRETAS 16
1.4 PROCEDIMIENTO PARA LA IMPLEMENTACIÓN DE LA OT 16
1.5 MAGNITUDES DEL DISEÑO 17
1.6 PROBLEMA ELÁSTICO POR EL MÉTODO DE LOS ELEMENTOS FINITOS 17
1.7 ENERGÍA DE DEFORMACIÓN 18
1.8 CONCEPTOS DEL MÉTODO DE OPTIMIZACIÓN TOPOLÓGICA 19
1.8.1 Dominio extendido fijo del diseño 19
1.8.2 Método de densidades 19
1.9 DEFINICIÓN DEL PROBLEMA 20
1.10 TÉCNICAS DE SOLUCIÓN DEL PROBLEMA DE OT 21
1.11 PROBLEMAS TÍPICOS 21
2. IMPLEMENTACIÓN NUMÉRICA 24
2.1 ANÁLISIS POR ELEMENTOS FINITOS 24
2.2 PROGRAMACIÓN LINEAL SECUENCIAL (PLS) 25
4
2.3 FILTRO 27
3. RESULTADOS NUMÉRICOS 30
3.1 VALIDACIÓN DEL CÓDIGO 30
3.1.1 Viga biapoyada de Michell 30
3.1.2 Viga Messerschmitt–Bölkow–Blohm (MBB) 31
3.1.3 Viga en voladizo 33
3.1.4 Viga con zona no optimizable 34
3.2 RESULTADOS CON DIFERENTES PARÁMETROS 35
3.2.1 Discretización 35
3.2.2 Factor de penalización 36
3.2.3 Fracción de volumen 37
3.2.4 Radio de influencia del filtro 39
3.3 CONVERGENCIA 40
4. DISEÑO MECÁNICO 43
5. CONCLUSIONES 47
TRABAJOS FUTUROS 48
BIBLIOGRAFÍA 49
ANEXOS 51
5
LISTA DE FIGURAS
Figura 1. Problema de máxima rigidez con restricción de volumen. 12
Figura 2. Categorías de optimización estructural: (a) optimización paramé-trica,(b) optimización de forma y (c) optimización topológica. 15
Figura 3. Problema elástico. 18
Figura 4. Demostración del problema de inestabilidades de escala de grisesen la viga Michell biapoyada: (a) dominio de diseño del problema y (b)solución. 22
Figura 5. Demostración del problema de inestabilidades de ajedrez en una vi-ga corta en voladizo: (a) dominio de diseño del problema, (b) solución parauna discretización de 5000 elementos y (c) solución para una discretizaciónde 1800 elementos. 22
Figura 6. Representación gráfica del radio de influencia del filtro para(a) rmin =1.0 y (b) rmin= 3.5. 28
Figura 7. (a) dominio de cálculo para la Viga de Michell biapoyada con fu-erza central, (b) solución obtenida con el código desarrollado y (c) solu-ción reportada por Bendsøe y Sigmund 2003[4]. 30
Figura 8. (a) dominio completo de cálculo para la viga MBB, (b) solución ob-tenida con el código desarrollado y (c) solución reportada porBendsøe ySigmund 2003 [4]. 31
Figura 9. (a) dominio reducido de cálculo para la viga MBB, (b) solución ob-tenida con el código desarrollado y (c) solución reportada por Bendsøe ySigmund 2003 [4]. | 32
Figura 10. (a) dominio de cálculo para el problema de la viga en voladizo(L/H = 4), (c) y (e) soluciones obtenida con el código desarrollado yreportada en la literatura [4], respectivamente, para la viga larga (L/H = 4),dominio de cálculo para el problema de la viga en voladizo (L/H = 2),(d) y (f) soluciones obtenida con el código desarrollado y reportada en laliteratura [4], respectivamente, para la viga corta (L/H = 2). 33
Figura 11. (a) dominio de cálculo para el problema de la viga con zona nooptimizable y (b) solución obtenida con el código desarrollado. 34
Figura 12. Solución del problema de la viga con dominio reducido MBB
6
mostrado en la Figura 9b variando la discretización. 35
Figura 13. Topología obtenida con la viga con múltiples cargas para dife-rentes valores de factor de penalización (p). 36
Figura 14.Topología obtenida con la viga con carga central para diferentesvalores de la fracción de volumen (V ). 38
Figura 15. Topología obtenida con la viga en voladizo con carga en la esqui-na para diferentes valores del radio de influencia del filtro rmin. 39
Figura 16. Topología obtenida con la viga con carga distribuida para dife-rentes valores de iteración. 41
Figura 17. Gráfico de la curva de convergencia mostrando la función objeti-vo (energía de deformación) en función del número de iteraciones. 42
Figura 18. Puente de arco en el estado de Kansas, Estados Unidos. 42
Figura 19. Dimensiones del componente mecánico (medidas en milímetros). 43
Figura 20. Dominio inicial del diseño del componente mecánico. 44
Figura 21. Contorno de la topología óptima. 44
Figura 22. Interpretación del componente mecánico óptimo. 45
Figura 23. Distribución de esfuerzos del componente original (von-Mises). 45
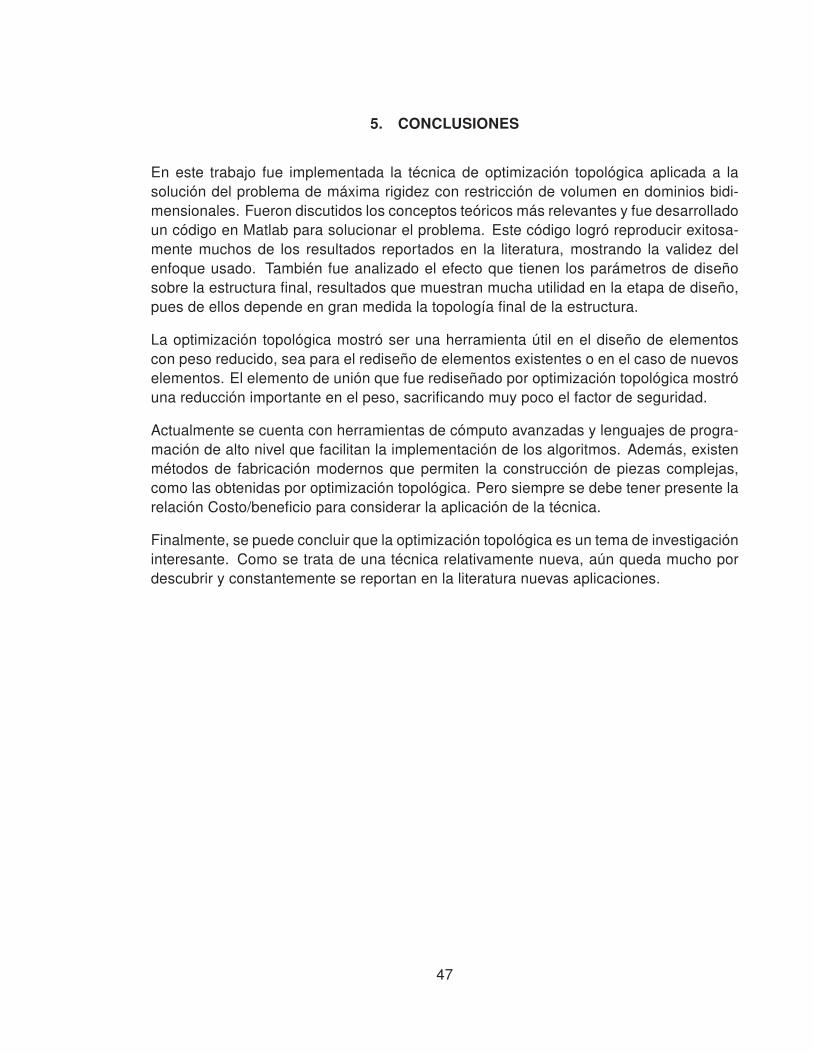
Figura 24. Distribución de esfuerzos del componente óptimo (von-Mises). 46
Figura 25. Estado de tensión plana . 51
Figura 26. Estado de deformación plana. 52
Figura 27. Elemento Rectangular de 4 Nodos (a) Caso regular, (b) Casoirregular. 54
Figura 28. (a)Desplazamientos nodales , (b) Fuerzas nodales. 55
Figura 29. Elemento Rectangular de 4 Nodos. 56
7
LISTA DE ANEXOS
Anexo A. Tensión plana 51
Anexo B. Elemento plano de cuatro nodos con interpolación lineal 54
Anexo C. Código 63
8

NOMENCLATURA
Caracteres latinos:
B Matriz de las derivadas de la función de formac Función objetivoD Matriz de materialE Módulo de elasticidadf Vector de cargaH Altura del dominio rectangular inicialHe Operador de convoluciónK Matriz de rigidez globalKe Matriz de rigidez del elementoL Ancho del dominio rectangular inicialN Número de elementosp Factor de penalidadu Vector de desplazamientos nodalesU Energía de deformaciónvi Volumen del elementoV Fracción de volumen finalF.S Factor de seguridad
Caracteres griegos:
ρi Variables de proyecto (pseudo-densidad del i-ésimo elemento finito)ρmin Valor mínimo de las variables de proyectoσ Tensión mecánicaσy Esfuerzo admisible (fluencia)ν Módulo de PoissonΩ Dominio de diseño
9

RESUMEN
Este trabajo hace una revisión de la técnica de optimización topológica (OT) aplicada aldiseño de estructuras de peso reducido. El problema consiste en encontrar la topologíaque tenga la mayor rigidez con una restricción en el volumen final del material, partiendode un dominio bidimensional rectangular con las restricciones y cargas correspondientes.El trabajo se divide en tres partes generales: revisión del estado del arte, implementaciónde un código en Matlab y reproducción de los resultados reportados en la literatura, yaplicación de la técnica al diseño de una pieza mecánica de peso reducido.
El trabajo comienza con el estudio de la formulación del elemento Q4 (elemento plano de4 nodos y 2 grados de libertad por nodo con interpolación lineal) para el problema elás-tico, y su implementación numérica. El siguiente paso es el estudio del planteamientodel problema de optimización y su solución por medio de PLS (Programación LinealSecuencial). PLS es un método que soluciona un problema de optimización no linealconvirtiéndolo en una serie de problemas lineales. La linealización del problema se hacepor medio de la serie de Taylor y cada problema lineal se soluciona usando programaciónlineal, con algoritmos bien conocidos como el Simplex o el Karmarkar.
La metodología de cálculo usada para la optimización topológica se basa en el modeloSIMP (Solid Isotropic material with Penalization), donde las variables de proyecto son uncampo escalar de pseudo-densidades (ρi). Cada una estas pseudo-densidades es unavariable real con valor entre cero y uno (0 ≤ ρi ≤ 1) que multiplica la matriz de rigidezde cada elemento finito usado para discretizar el dominio. La solución del problemaconsiste en hallar los valores de estas variables de proyecto de tal forma que se obtengala máxima rigidez con el volumen de material final preestablecido.
La implementación numérica se realizó totalmente en Matlab, que es un lenguaje de altonivel especialmente diseñado para el trabajo numérico y que facilita, en gran medida,la manipulación de matrices de gran tamaño y dispone de una gran colección de fun-ciones y algoritmos matemáticos. Además de los cálculos esenciales para solucionarel problema de optimización topológica, el programa de Matlab debe contener el códigorequerido para visualización de los resultados, en la forma de gráficos de convergencia,imágenes o videos 2D del campo escalar de variables de proyecto (pseudo-densidades),entre otros.
Para poner a prueba la validez de los resultados obtenidos con el código, algunos pro-blemas con solución bien conocida (benchmarks) serán solucionados y los resultadoscomparados con los reportados en la literatura. Estos problemas son la viga MBB y laviga de Michell, y otros problemas como generación de estructuras de puentes. Todosellos han sido abordados por varios autores y con resultados disponibles que sirven decomparación.
En la parte final del trabajo, será seleccionada una pieza mecánica existente y que sea
10

posible rediseñar por OT en 2D. Será realizado el análisis por OT, la interpretación delresultado para obtener un diseño mecánico convencional y el diseño será simulado paracomprobar su resistencia mecánica por medio de Ansys, un software comercial parasimulación por elementos finitos. Los resultados permitirán cuantificar la reducción depeso obtenida.
Palabras claves: Optimización topológica, máxima rigidez, restricción de volumen, vari-ables del diseño, distribución del material, elementos finitos y dominio.
11
INTRODUCCIÓN
La optimización topológica (OT) es una herramienta matemática que le permite al dis-eñador sintetizar topologías óptimas. En ingeniería mecánica se entiende como topolo-gía óptima a una pieza o parte mecánica diseñada especialmente para maximizar ominimizar alguna característica deseada. Por ejemplo, cuando se diseña una ala deavión se desea obtener el menor peso posible asegurando la rigidez y la resistenciaadecuadas. El problema de la máxima rigidez es extremadamente importante para in-geniería mecánica e ingeniería de estructuras, pues permite reducir el peso final delelemento mecánico o estructural, y partes mecánicas de bajo peso implican menorescostos por material y menor consumo de combustible en el caso de vehículos de trans-porte.
La OT es un campo de investigación de rápido crecimiento, donde intervienen distintasáreas como son las matemáticas, la mecánica y las ciencias computacionales, y quecuenta con importantes aplicaciones prácticas en la industria y en el sector de manufac-tura. En la actualidad, la optimización topológica es usada en las industrias aeroespacial,automotriz, de obras civiles, entre otras. Además tiene un papel muy importante en elcampo de las micro y nanotecnologías, principalmente, en el diseño de mecanismosflexibles.
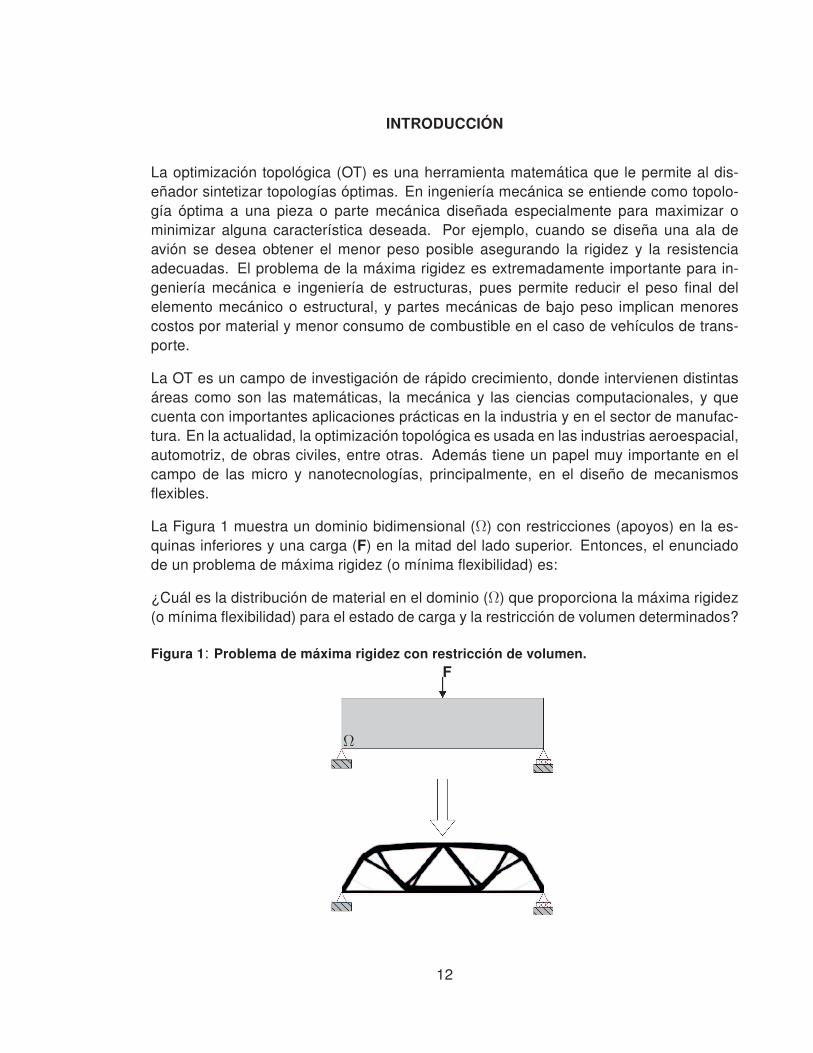
La Figura 1 muestra un dominio bidimensional (Ω) con restricciones (apoyos) en la es-quinas inferiores y una carga (F) en la mitad del lado superior. Entonces, el enunciadode un problema de máxima rigidez (o mínima flexibilidad) es:
¿Cuál es la distribución de material en el dominio (Ω) que proporciona la máxima rigidez(o mínima flexibilidad) para el estado de carga y la restricción de volumen determinados?
Figura 1: Problema de máxima rigidez con restricción de volumen.
Ω
F
12
La optimización topológica es una técnica que soluciona numéricamente el problema,por medio de algoritmos iterativos que maximizan o minimizan una función objetivo (ode costo). La parte inferior de la Figura 1 muestra la topología óptima obtenida para elestado de carga mostrado y el volumen final de la estructura igual al 40% del volumeninicial. El resultado mostrado en la Figura 1 es una estructura familiar. Muchos puentesde barras articuladas presentan esta geometría, llamada viga Messerschmitt–Bölkow–Blohm (MBB).
Existen muchas otras aplicaciones de la OT en la ingeniería mecánica, como son: diseñode mecanismos flexibles y micromecanismos [16, 9, 12], diseño de MEMs (SistemasMicro-Electro-Mecánicos) [19, 10], diseño de metamateriales (materiales con coeficientede Poisson o coeficiente de expansión térmica negativos) [11], resonadores, aletas paraintercambio de calor, entre otras aplicaciones. Además, están comenzando a aparecertrabajos sobre aplicación de la técnica en la dinámica de fluidos [17], tales como diseñode mezcladores, muros de contención de represas [20], perfiles de ala de avión [14],entre otros.
Muchas industrias que fabrican piezas mecánicas, tales como la automotriz, aeroespa-cial, naval, de obras civiles, entre otras, requieren el diseño de piezas con el menor pesoposible pero asegurando su resistencia mecánica. Actualmente, la reducción de peso sedebe a criterios del diseñador, quien retira material de una manera casi empírica y com-prueba si el resultado es aceptable por medio del análisis de resistencia mecánica. Latécnica de la optimización topológica permite diseñar estructuras óptimas, con el menorpeso posible para un determinado estado de carga y una determinada restricción devolumen.
Se pueden mencionar muchos casos donde la OT ha sido empleada exitosamente. Uncaso famoso es el diseño de las alas de los aviones Airbus A380, que por medio deOT quedaron considerablemente más livianas que las diseñadas por medios conven-cionales, ahorrando en combustible y al mismo tiempo aumentando la carga útil de laaeronave.
La OT es una técnica relativamente nueva. La primera publicación The limits of eco-
nomy of material in framestructures de A. G. Michell apareció en 1904. En este trabajose estudiaron los criterios de optimización para la reducción de peso en estructurasde barras articuladas, aplicando los resultados al análisis de una especie de viga envoladizo llamada “Viga de Michell”. El problema de la viga de Michell ha sido un puntode referencia y ejemplo básico en el estudio de los métodos de optimización estructural.
En la década de 1970, con la evolución en la computación digital y los métodos numéri-cos, se despertó un nuevo interés en el tema. Autores como Mröz [15] y Pragera [18]estudiaron la optimización analítica exacta en problemas estructurales y se mostraronlas importantes ventajas de los métodos numéricos.
13

Desde finales de la década de 1980 se han presentado los progresos más significativos,tanto en la teoría como en la aplicación de la optimización topológica en la solución deproblemas de ingeniería. Una gran cantidad de artículos científicos han sido publicados.Técnicas de cálculo como el método de homogeneización [3, 21] y el modelo de materialSIMP (Solid Isotropic Material with Penalization) [4, 12] aparecieron en este época ysiguen siendo usadas ampliamente. Estas técnicas proporcionan el modelo de materialnecesario para modelar numéricamente el problema de optimización topológica. Otrastécnicas como la ESO (Evolutionary Structural Optimization) [8] se han popularizado enlos últimos años.
También existen varios autores que han estudiado cómo solucionar el problema de op-timización de manera rápida y eficiente. Técnicas como el criterio de optimalidad (OC)[24], el método de las asíntotas móviles (MMA) [22] y la programación lineal secuencial(PLS) [19] han sido ampliamente usados, quedado claras sus ventajas y limitaciones.Por ejemplo, el OC es una técnica que permite solucionar rápidamente problemas senci-llos y la PLS requiere más tiempo de procesamiento pero permite solucionar problemasmás complejos.
14
1. OPTIMIZACIÓN TOPOLÓGICA
1.1 TIPOS DE OPTIMIZACIÓN
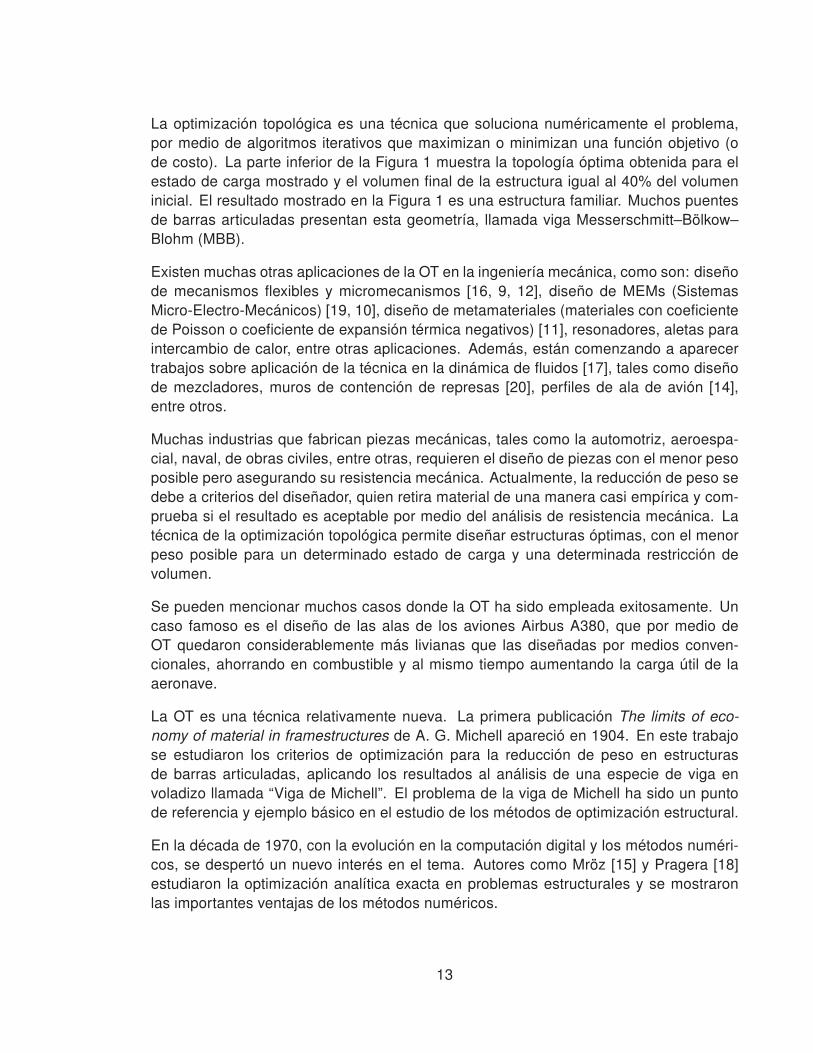
En ingeniería siempre se desea determinar la mejor configuración de una pieza o unsistema para optimizar algunas características importantes en su desempeño final. Enel caso de la optimización estructural, para obtener la solución óptima del problema seemplean diferentes técnicas, que van desde enfoques netamente empíricos, hasta méto-dos matemáticos analíticos y numéricos. En el caso de la optimización estructural, losmétodos numéricos poseen la mayor relevancia y se pueden dividir en tres categorías:optimización paramétrica, optimización de forma y optimización topológica. La Figura 2muestra gráficamente en qué consisten estas tres técnicas numéricas.
Figura 2: Categorías de optimización estructural: (a) optimización paramétrica, (b) opti-mización de forma y (c) optimización topológica.
(a)
(b)
(c)
La primera categoría es la optimización paramétrica, que consiste en discretizar unaestructura preestablecida con elementos cercha (barra articulada) para encontrar lasdimensiones óptimas de la estructura. Las variables del diseño que pueden ser mod-ificadas son el área transversal de cada elemento, longitudes, espesores y radios deentalle [4].
La segunda categoría es la optimización de forma, donde se busca encontrar la formaóptima de un dominio sin modificar su topología, es decir, sin agregar huecos o cavidadesen su interior. En este caso se parametrizan los contornos internos y externos de laestructura mediante curvas splines o nurbs, para controlar la geometría del diseño. Losparámetros de estas curvas son las variables del diseño que dan como resultado la formaóptima de la estructura.
15
La última categoría es la optimización topológica, donde el objetivo es distribuir el mate-rial en el dominio para encontrar la estructura. En este problema se introducen huecoso cavidades que en el inicio no estaban presentes. Inicialmente solo se dispone de lainformación de las condiciones de carga y las restricciones (apoyos), y el dominio inicialdonde se desarrollará la estructura.
1.2 OPTIMIZACIÓN TOPOLÓGICA DE ESTRUCTURAS CONTINUAS
Cuando se considera la optimización topológica a partir de un medio continúo, lo quese busca es la óptima configuración de la estructura, donde el dominio se discretiza enelementos finitos que representan divisiones del material. La optimización topológica deestructura continua será abordada en este trabajo.
1.3 OPTIMIZACIÓN TOPOLÓGICA DE ESTRUCTURAS DISCRETAS
La optimización topológica a partir de un dominio discreto se divide en dos categorías,optimización topológica de estructura de malla continua y optimización topológica deestructuras discretas.
Donde la optimización topológica de estructura de malla continua, considera un dominiocontinuo de la estructura discretizando por un número infinito barras rígidas distanciadaspor un espacio infinitesimal, cuya solución óptima es obtenida analíticamente por lateoría de la elasticidad.
La optimización topológica de estructuras discretas, considera un dominio donde hayvarios puntos distribuidos y pueden ser posibles juntas, cuya solución óptima se obtienenuméricamente.
1.4 PROCEDIMIENTOS PARA LA IMPLEMENTACIÓN DE LA OT
Los pasos de un análisis por OT son (BENDSØE; KIKUCHI y SUZUKI, 1988; KIKUCHI,1991):
• Definir un domino inicial (Ω) lo más grande posible para poder garantizar que no sepresenten limitaciones, pues un dominio pequeño estaría reduciendo el espacio de solu-ciones [5]. El dominio inicial esta intrínsecamente relacionado con el tipo y aplicación decarga (Condiciones de carga) además de las restricciones (Condiciones de contorno).
• Discretización del dominio en elementos finitos.
• Implementación del algoritmo de optimización topológica, que comienza a analizar
16

el dominio iterativamente calculando las tensiones mecánicas por elementos finitos, ydistribuyendo y eliminado el material de la estructura para obtener como resultado laóptima distribución de material es un espacio.
• Interpretación del resultado obtenido, donde se tienen que eliminar algunos problemasque generan los algoritmos, como las escala de grises e inestabilidades tipo ajedrez.
• Verificación del resultado obtenido por medio de algún programa de elementos finitosy finalmente la fabricación de la estructura mecánica.
1.5 MAGNITUDES DEL DISEÑO
Las magnitudes del diseño son aquellas propiedades que influyen en el desarrollo de laOT. Unas permanecen fijas y otras pueden ser modificadas. Pueden clasificarse en lossiguientes dos grupos:
• Parámetros del problema: son magnitudes donde su valor es inalterable durante todoel diseño, sus valores están condicionados a factores externos del problema.
• Variables del problema: son valores que cambian durante el proceso de diseño y seclasifican en cuatro tipos:
⋆ Propiedades de la sección del elemento estructural mecánico, tales como momentosde inercia y de torsión, área, entre otras.
⋆ Geometría del elemento estructural mecánico: espesor, longitud, altura, radios de en-talle, etc.
⋆ Topología del elemento estructural mecánico: densidad del material, perímetro total,etc.
⋆ Propiedades constitutivas: módulo de elasticidad, coeficiente de Poisson, etc.
1.6 PROBLEMA ELÁSTICO POR EL MÉTODO DE LOS ELEMENTOS FINITOS
El método de elementos finitos consiste en discretizar un dominio continuo en subdomi-nios (elementos finitos) interconectados por medio de nodos, formando una malla, comose muestra en la Figura 3. La solución del elemento finito es conocida y, de esta man-era, el problema complejo regido por ecuaciones diferenciales parciales se reduce a lasolución simultánea de todos los elementos finitos, que en conjunto llevan a un sistemade ecuaciones lineales, que se soluciona fácilmente en un computador.
17
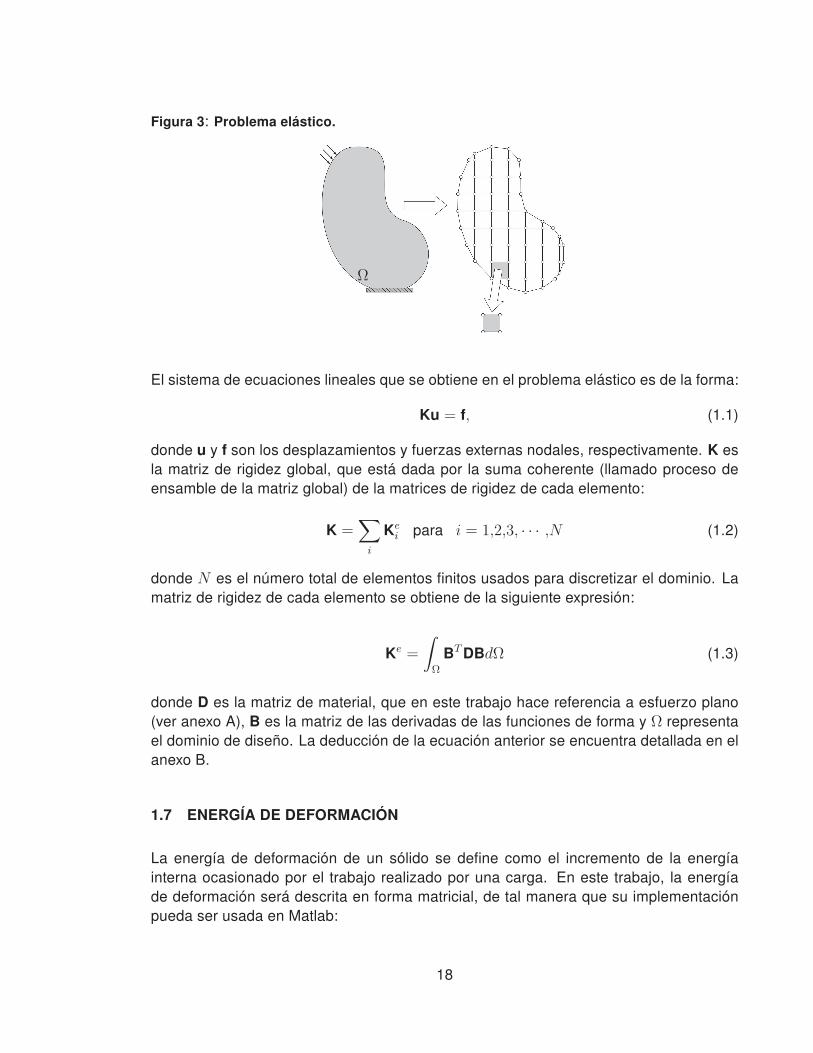
Figura 3: Problema elástico.
Ω
El sistema de ecuaciones lineales que se obtiene en el problema elástico es de la forma:
Ku = f, (1.1)
donde u y f son los desplazamientos y fuerzas externas nodales, respectivamente. K esla matriz de rigidez global, que está dada por la suma coherente (llamado proceso deensamble de la matriz global) de la matrices de rigidez de cada elemento:
K =∑
i
Kei para i = 1,2,3, · · · ,N (1.2)
donde N es el número total de elementos finitos usados para discretizar el dominio. Lamatriz de rigidez de cada elemento se obtiene de la siguiente expresión:
Ke =
∫
Ω
BTDBdΩ (1.3)
donde D es la matriz de material, que en este trabajo hace referencia a esfuerzo plano(ver anexo A), B es la matriz de las derivadas de las funciones de forma y Ω representael dominio de diseño. La deducción de la ecuación anterior se encuentra detallada en elanexo B.
1.7 ENERGÍA DE DEFORMACIÓN
La energía de deformación de un sólido se define como el incremento de la energíainterna ocasionado por el trabajo realizado por una carga. En este trabajo, la energíade deformación será descrita en forma matricial, de tal manera que su implementaciónpueda ser usada en Matlab:
18
U = uTKu (1.4)
Para la solución del problema de máxima rigidez con restricción de volumen por OT serequiere minimizar la energía de deformación en todo el dominio, para las condicionesde cargas establecidas. Las técnicas de solución serán detalladas más adelante.
1.8 CONCEPTOS DEL MÉTODO DE OPTIMIZACIÓN TOPOLÓGICA
El método de optimización topológica fundamenta en dos conceptos que son: el dominioextendido fijo del diseño y el modelo del material, que para este trabajo se usara elmétodo de densidades, los cuales serán detallados a continuación.
1.8.1 Dominio extendido fijo del diseño. Un dominio extendido fijo de diseño, es unespacio en el que se puede construir una estructura por medio del algoritmo de opti-mización topológica. Consiste en un dominio de forma fija donde se contiene la estruc-tura desconocida, el cual está restringido por los puntos de apoyos de la estructura y lospuntos de aplicación de las cargas, los cuales intervienen en el diseño de la estructura.
1.8.2 Método de densidades. El método de densidades es un modelo de material quesimula una microestructura y se representa por:
Ke(ρi) = ρiKe, (1.5)
donde Ke(ρi) resulta de modificar la matriz de rigidez del elemento multiplicándola porla variable de diseño correspondiente. ρi representa las variables de diseño, que sepueden entender como un valor de densidades en cada punto del dominio, que puedenvariar de 0 a 1, lo cual indica sin presencia de material y presencia de material, res-pectivamente. Ke es la matriz de rigidez de cada elemento, con las propiedades de unmaterial isotrópico. En este trabajo, esta matriz es contante, pues el dominio se discretizacon elementos finitos cuadrados todos del mismo tamaño, por tanto, todos presentan lamisma matriz de rigidez.
Teóricamente se habla de un valor de pseudo-densidad nulo ρ = 0. En la práctica noes posible porque se introducen ceros en la diagonal principal de la matriz de rigidezglobal, llevando a un sistema lineal de ecuaciones indeterminado. Este problema sesoluciona usando un valor mínimo muy pequeño (ρmin). La literatura recomienda unvalor de ρmin = 0,001.
El método de las densidades es útil, sin embargo, se presentan valores intermedios delas variables de diseño. Este problema se denomina “escala de grises”, que dificulta lainterpretación final del diseño.
19

Para disminuir las densidades intermedias se desarrolló el método SIMP (Solid Isotropic
Material with Penalization). En este método, las pseudo-densidades se penalizan (seelevan a un exponente) que hace que los valore intermedios se acerquen a los extremos:
Ke(ρi) = ρpi Ke, (1.6)
donde p es el factor de penalidad. Por otro lado, este modelo tiene una gran ventaja: laderivada de la función objetivo con respecto a las variables de proyecto (sensibilidad),requerida por el algoritmo de solución del problema, se obtiene fácilmente.
1.9 DEFINICIÓN DEL PROBLEMA
El problema de optimización topológica abordado en este trabajo consiste en obtener ladistribución de material, en un dominio inicial de forma rectangular, que proporcione lamayor rigidez para el estado de carga y restricciones establecidas, y la cantidad final devolumen deseado. Los parámetros de cálculo son las restricciones de desplazamiento,las cargas aplicadas y las propiedades del material. Las variables de diseño son laspseudo-densidades, que consiste en un escalar con valor entre cero y uno que multi-plica cada elemento finito. En algunos casos es necesaria la presencia de zonas nooptimizables, es decir, zonas donde el material debe ser conservado o eliminado desdeel comienzo.
La topología de la estructura es representada por un conjunto de funciones definidas enel dominio fijo del diseño, la correcta selección de estos parámetros, dará como resultadouna apropiada formulación para la optimización topológica. El problema de optimizacióntopológica se define de la siguiente manera:
minimizar:ρi
c(ρi)
sujeto a: K(ρi)u = fN∑
i=1
viρi ≤ V
0 < ρmin ≤ ρi ≤ 1, para i = 1,2,3, · · · ,N
(1.7)
Donde c(ρi) es la función objetivo (también llamada función de costo) y modela la en-ergía de deformación (U ). Usando el modelo de material SIMP seleccionado, la funciónobjetivo tiene la siguiente forma:
c(ρi) = ρpuTKu (1.8)
20
Minimizar la energía de deformación equivale a maximizar la rigidez de la estructura. Dela manera que está planteado el problema de optimización se tienen tres restricciones.La primera se relaciona con la condición de equilibrio estático de la estructura, es decir,el cálculo de los desplazamientos nodales para el estado de carga establecido y losvalores de las variables de diseño en ese momento. La segunda restricción representael volumen final de la estructura y la tercera restricción determina los valores que puedenadquirir las variables de diseño. Se recuerda que N es el número total de elementosfinitos usados para discretizar el dominio.
Las soluciones que se obtiene por el método de elementos finitos en problemas de op-timización se pueden representar como un mapa de pixeles en blanco y negro de lasvariables del diseño, valores que hacen referencia a la no presencia y presencia dematerial, respectivamente. El algoritmo de OT distribuye de manera óptima el material,adicionándolo en los lugares donde se presentan las mayores energías de deformacióny removiéndolo donde la energía de deformación es pequeña.
1.10 TÉCNICAS DE SOLUCIÓN DEL PROBLEMA DE OT
A medida que ha ido evolucionando la optimización topológica, su implementación enproblemas con un mayor grado de complejidad son más comunes. Esto ha requerido eldesarrollo de nuevas técnicas de solución. Dentro de las técnicas de solución se puedenmencionar el criterio de optimalidad OC, el método de la asíntota móvil MMA y el métodode programación lineal PLS, entre otros.
El criterio de optimalidad OC [24] permite solucionar de manera eficiente los problemassimples de optimización topológica. Para problemas más complejos, como por ejemplo,en el diseño de mecanismos electro-mecánicos, donde los problemas elástico y térmicodeben ser solucionados simultáneamente, se destacan los métodos MMA [22] y PLS [5],pues presentan buena convergencia. En este trabajo, el problema de optimización serásolucionado por el método de programación lineal, el cual será abordado con detalle enel siguiente capítulo.
1.11 PROBLEMAS TÍPICOS
Los problemas típicos que suelen presentarse en la implementación del OT son la escalade grises y el tablero de ajedrez. Estos problemas afectan la convergencia y dificultan lainterpretación final del resultado.
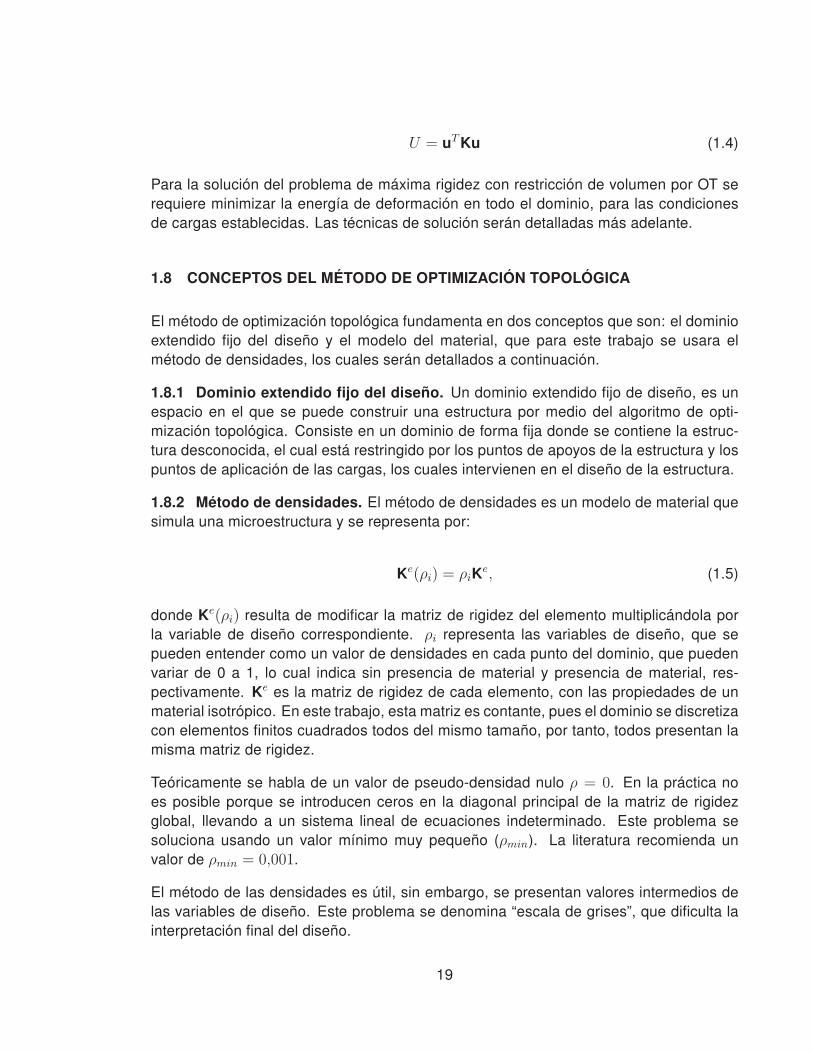
La escala de grises como lo muestra la Figura 4 son pseudo-densidades intermediasen el dominio final. Para lograr un diseño óptimo reduciendo al máximo las escalas degrises se usa la penalización de las pseudo-densidades planteada por el modelo SIMP.
21
Sin embargo, impedir la aparición de escalas grises en su totalidad es difícil.
Figura 4: Demostración del problema de inestabilidades de escala de grises en la vigaMichell biapoyada: (a) dominio de diseño del problema y (b) solución.
(a)
Ω
F
(b)
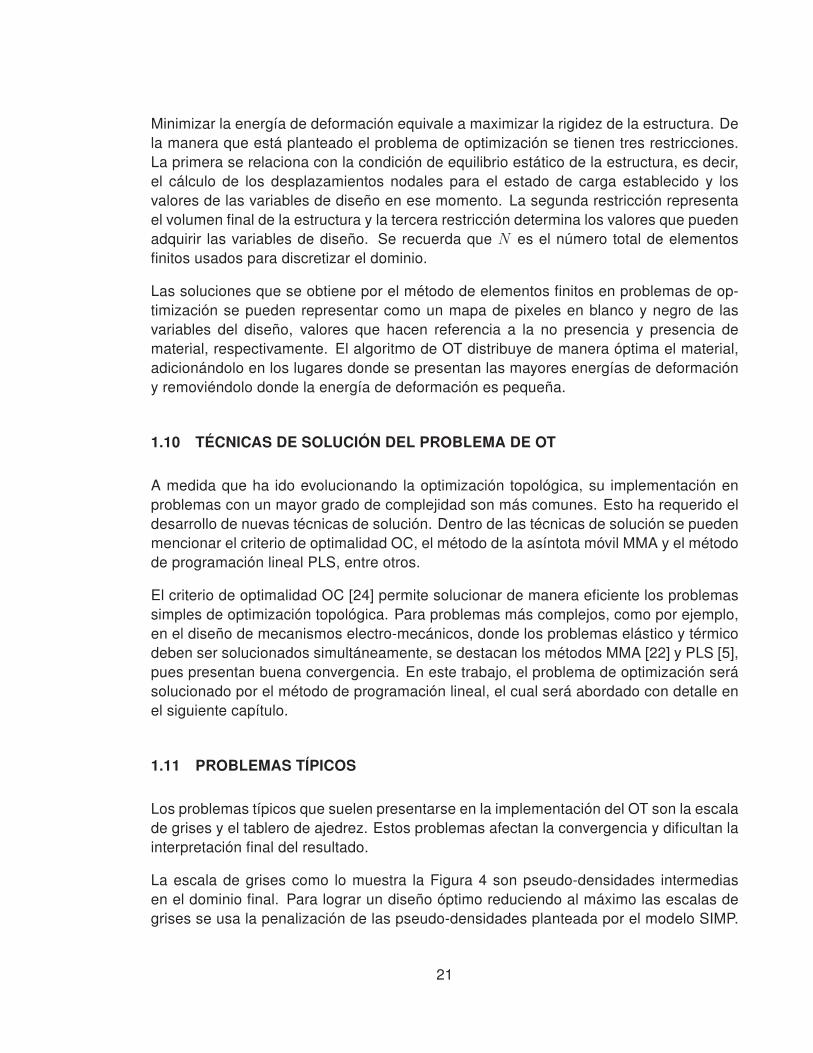
El otro problema son las inestabilidades del tipo tablero de ajedrez, que aparecen, prin-cipalmente, cuando se usan elementos finitos con interpolación lineal en el método deoptimización topológica.
Figura 5: Demostración del problema de inestabilidades de ajedrez en una viga corta envoladizo: (a) dominio de diseño del problema, (b) solución para una discretización de 5000elementos y (c) solución para una discretización de 1800 elementos.
F
Ω
(a)
(b)
(c)
22

Este problema se presenta como una región del dominio donde se alternan elementossolidos (color negro) con espacios vacíos (color blanco) dispuesto en forma de tablero deajedrez. La rigidez de la región que contiene el tablero de ajedrez es mayor comparadaa una región con distribución uniforme de material. En la Figura 5 se muestra un ejemplodel problema. Para evitarlo es necesario la implementación de un filtro encargado deamortiguar las grandes diferencias en pseudo-densidad entre elementos adyacentes,para este trabajo se utilizó el filtro propuesto por Bendsøe y Sigmund [4] explicado en elsiguiente capítulo.
23

2. IMPLEMENTACIÓN NUMÉRICA
2.1 ANÁLISIS POR ELEMENTOS FINITOS
En este trabajo se requiere solucionar el problema de OT en un dominio bidimensional,donde se considera que la dimensión en la dirección z es pequeña comparada con lasdimensiones en las direcciones x y y. En este caso, se tiene un estado de tensión plana.Por otro lado, todos los elementos finitos son cuadrados de lado unitario (a = b = 1) y es-pesor unitario (t = 1). Esto ayuda simplificar el problema, pues no se requiere una mallaexplícita, y reduce el costo computacional. Usando estos valores en la ecuación (B.28)se obtiene la matriz de rigidez del elemento, lista para ser implementada en Matlab:
Ke =E
1− υ2
k1 k2 k3 k4 k5 k6 k7 k1
k1 k8 k7 k6 k5 k4 k3
k1 k6 k7 k4 k5 k2
k1 k8 k3 k2 k5
k1 k2 k3 k4
k1 k8 k7
k1 k6
Sim. k1
(2.1)
Donde:
k1 =1
2−
υ
6k2 =
1
8+
υ
8k3 = −
1
4−
υ
12k4 = −
1
8+
3υ
8(2.2)
k5 = −1
4+
υ
12k6 = −
1
8−
υ
8k7 =
υ
6k8 =
1
8−
3υ
8
y E y ν son los módulos de elasticidad y de poisson, respectivamente.
En la solución del problema, la matriz de rigidez del elemento se calcula una únicavez y la matriz de rigidez global se ensambla a partir de la matriz de rigidez de cadaelemento multiplicada por su correspondiente variable de diseño. Luego las restriccionesse aplican a la matriz de rigidez global y se ensambla el vector de cargas. Finalmentese soluciona el sistema de ecuaciones para obtener los desplazamientos nodales. Esteproceso se repite en cada iteración.
24

2.2 PROGRAMACIÓN LINEAL SECUENCIAL (PLS)
El proceso de optimización es la búsqueda matemática del valor mínimo (o máximo) deuna función, llamada función objetivo, que modela la característica física que se quiereoptimizar. El punto óptimo es el conjunto de valores de las variables de diseño que min-imiza la función objetivo. En este punto la curva es plana y la primera derivada de lafunción con respecto a las variables de diseño es igual cero. Una función objetivo tienesolamente un mínimo global, pero puede tener varios mínimos locales. Si la función ob-jetivo tiene varios mínimos locales, el algoritmo tiende a quedarse estancado en algunode ellos y nunca alcanzar el mínimo global. Determinar si el punto óptimo alcanzado esun mínimo local o el mínimo global es un problema matemático complicado y muy de-pendiente del tipo de problema. Sin embargo, muchos de estos mínimos locales llevana soluciones útiles, como es el caso en este trabajo.
Para la solución del problema de optimización descrito en la ecuación (2.3) se usaráprogramación lineal secuencial (PLS). El PLS resuelve un problema de optimización nolineal dividiéndolo en una secuencia de problemas de optimización lineales que puedenser resueltos con la conocida técnica de programación lineal (PL). La programación lin-eal es una técnica que resuelve un problema de optimización formulado por medio deecuaciones lineales. En la PL, tanto la función objetivo como las restricciones del pro-blema son funciones lineales de las variables de diseño. Este problema de optimizaciónlineal se puede representar de la siguiente manera:
minimizar:x
f(x) = c1x1 + c2x2 + ...+ cnxn
sujeto a: g1(x) = a11x1 + a12x2 + ...+ a1nxn ≤ b1g2(x) = a21x1 + a22x2 + ...+ a2nxn ≤ b2
...gm(x) = am1x1 + am2x2 + ...+ amnxn ≤ bmx1 ≥ 0, x2 ≥ 0, · · · , xn ≥ 0
(2.3)
donde x es el vector que contiene las variables de proyecto, f(x) es la función obje-tivo y las funciones gm(x) son las restricciones. Además, las variables de proyecto sonacotadas (xn ≥ 0).
Para el problema de optimización topológica la función objetivo no es lineal con relacióna las variables de proyecto. Sin embargo, el problema puede ser linealizado, usando laSerie de Taylor para expandir la función objetivo. La expansión en serie de Taylor parauna función f(x) alrededor de x0 está dada por la siguiente expresión:
f(x) = f(x0)+∂f
∂x
∣∣∣∣x=x0
(x−x0)+∂2f
∂x2
∣∣∣∣x=x0
(x− x0)2
2!+
∂3f
∂x3
∣∣∣∣x=x0
(x− x0)3
3!+ · · · (2.4)
25

y en forma compacta
f(x) =∞∑
n=0
∂nf
∂xn
∣∣∣∣x=x0
(x− x0)n
n!(2.5)
También se puede expandir una serie de Taylor para funciones de más de una variable.Por ejemplo, para una función de dos variables f(x,y) la expansión en serie de Tayloralrededor de x0 y y0 queda de la siguiente manera [1]:
f(x,y) = f(x0,y0) +
[
∂f
∂x
∣∣∣∣x=x0
y=y0
(x− x0) +∂f
∂y
∣∣∣∣x=x0
y=y0
(y − x0)
]
+
1
2!
[
∂2f
∂x2
∣∣∣∣x=x0
y=y0
(x− x0)2 +
∂2f
∂y2
∣∣∣∣x=x0
y=y0
(y − x0)2
]
+ · · ·
(2.6)
Siendo fácil ver cómo sería la generalización para una función de n variables.
La función objetivo del problema de optimización topológica se linealiza eliminando lostérminos de orden superior en la ecuación anterior:
cL(x) = c0 +∂f
∂ρ1
∣∣∣∣ρ=ρ0
1
(ρ1 − ρ01) +∂f
∂ρ2
∣∣∣∣ρ=ρ0
2
(ρ2 − ρ02) + · · ·+∂f
∂ρn
∣∣∣∣ρ=ρ0n
(ρn − ρ0n) (2.7)
donde ρ01,ρ02, · · · ,ρ
0n es el conjunto de valores iniciales de las variables de proyecto, que
es de libre elección y c0 = c(ρ01,ρ02, · · · ,ρ
0n, ) es la función objetivo evaluada en los valores
iniciales. En este trabajo, el número de variables de proyecto (n) es igual al número deelementos finitos usados para discretizar el dominio (N ). A partir de la literatura y loscálculos numéricos realizados, se sabe que los términos constantes c0 y ρ01,ρ
02, · · · ,ρ
0n no
influyen en el proceso de optimización y pueden ser eliminados. Finalmente la funciónobjetivo linealizada, que será usada en la PL, es de la siguiente forma:
cL(x) = ρ1∂c
∂ρ1
∣∣∣∣ρ=ρ1
+ ρ2∂c
∂ρ2
∣∣∣∣ρ=ρ2
+ · · ·+ ρn∂c
∂ρn
∣∣∣∣ρ=ρn
=N∑
i=1
ρi∂c
∂ρi
∣∣∣∣ρ=ρi
(2.8)
El PLS soluciona un problema de optimización no lineal por medio de sucesivos pro-blemas lineales, que son resueltos por el método de programación lineal. Para que estaaproximación sea válida es necesario imponer un límite superior y un límite inferior ala variación del valor de la variable de proyecto en cada subproblema. Esto tiene lafinalidad de asegurar la convergencia del problema. En cada iteración de la rutina del
26

PLS este minimiza la función objetivo en un intervalo establecido, el resultado obtenidose usa en la siguiente iteración como valor inicial y así sucesivamente hasta alcanzar elpunto óptimo.
El “límite móvil” fija el intervalo de cada subproblema y se selecciona como una fraccióndel vector de diseño. Su correcta selección es fundamental para la convergencia del pro-blema, pues a un determinado número de iteraciones, un valor grande del límite móvilhará que el resultado oscile alrededor del punto óptimo sin llegar a encontrarlo. Paraevitar este problema, se debe implementar un mecanismo que reduzca paulatinamenteel límite móvil a medida que avanzan las iteraciones.
Aplicando la serie de Taylor de primer grado a nuestra función objetivo dada en la ex-presión (1.8), para linealizar nuestro problema, obtenemos la expresión que será imple-mentada en la rutina del PL en Matlab:
minimizar:ρi
c(ρi) =N∑
i=1
ρi∂c
∂ρi
∣∣∣∣ρ=ρi
=N∑
i=1
pρp−1i (uTi Ke
i ui)ρi
sujeto a: K(ρi)u = fN∑
i=1
viρi ≤ V
ρmin ≤ (1− lmov)ρi ≤ ρi ≤ (1 + lmov)ρi ≤ 1
para i = 1,2,3, · · · ,N
(2.9)
donde lmov es el límite móvil, que debe tener un valor positivo menor que la unidad.
El problema de optimización mostrado es lineal y se puede solucionar por medio de laprogramación lineal, usando algoritmos como el Simplex [6] o el Karmarkar [2]. Esteproblema se soluciona secuencialmente, de manera iterativa, hasta alcanzar el puntoóptimo, que se puede reconocer por cambios muy pequeños en el valor de la funciónobjetivo, que es una función escalar, y en las variables de proyecto, o algún otro criteriode convergencia.
2.3 FILTRO
La implementación de un filtro en el código de optimización topológica es necesariopara la eliminación del problema de inestabilidades de tablero de ajedrez y la correctainterpretación de los resultados. Para el código desarrollado se usó el filtro propuestopor Bendsøe y Sigmund [4].
El filtro opera sobre la derivada de la función objetivo (sensibilidad), realizando una es-
27
pecie de promedio local, donde el valor de un determinado elemento se fija como elpromedio ponderado de los elementos circundantes. La expresión matemática del filtroes la siguiente:
∂c
∂ρ=
1
ρ
N∑
e=1
He
N∑
e=1
He ρ∂c
∂ρ,
(2.10)
donde N es el número total de elementos en la malla y He es el operador de convolución(factor de ponderación) definido tal como :
He = rmin − dist(k,i), i ∈ N |dist(k,i) ≤ rmin , k = 1,2, · · · ,N (2.11)
El operador dist(k,i) es definido como la distancia entre el elemento k y el centro delelemento i-ésimo. El operador de convolución He es cero fuera del área de filtro . Eloperador de convolución para el elemento i-ésimo decae linealmente con la distanciadesde el elemento k. La representación del dominio del diseño es graficada con el valorde las derivadas modificadas.
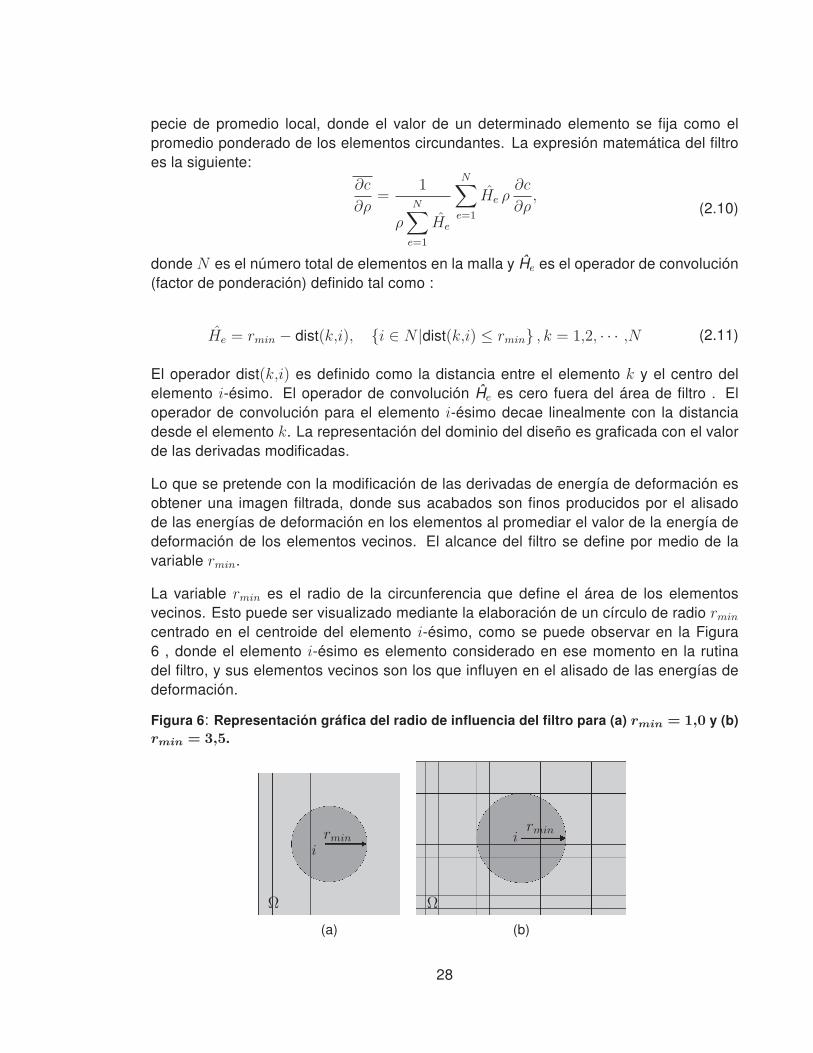
Lo que se pretende con la modificación de las derivadas de energía de deformación esobtener una imagen filtrada, donde sus acabados son finos producidos por el alisadode las energías de deformación en los elementos al promediar el valor de la energía dedeformación de los elementos vecinos. El alcance del filtro se define por medio de lavariable rmin.
La variable rmin es el radio de la circunferencia que define el área de los elementosvecinos. Esto puede ser visualizado mediante la elaboración de un círculo de radio rmin
centrado en el centroide del elemento i-ésimo, como se puede observar en la Figura6 , donde el elemento i-ésimo es elemento considerado en ese momento en la rutinadel filtro, y sus elementos vecinos son los que influyen en el alisado de las energías dedeformación.
Figura 6: Representación gráfica del radio de influencia del filtro para (a) rmin = 1,0 y (b)rmin = 3,5.
(a) (b)
Ω
rmin
i
Ω
rmini
28

En la Figura 6a se tiene el valor rmin = 1,0 y su circunferencia no abarca en su totalidad alos elementos vecinos y la rutina de filtrado no tiene ningún efecto. Según la literatura [4,8] se recomienda valores de rmin = 3,5, como en la Figura 6b, donde se abarcan varioselementos vecinos. En este caso, los resultados obtenidos no tienen inestabilidades detipo tablero de ajedrez que son de fácil interpretación. La influencia del valor de rmin enel diseño final será estudiada con más detalle en el siguiente capítulo.
29
3. RESULTADOS NUMÉRICOS
3.1 VALIDACIÓN DEL CÓDIGO
Para validar el código desarrollado se usaron tres problemas ampliamente cubiertos enla literatura, además se considerará un último problema donde se presenta una zona nooptimizable, para notar su aplicabilidad:
• Viga biapoyada de Michell.
• Viga Messerschmitt–Bölkow–Blohm (MBB).
• Viga en voladizo larga y corta.
• Viga en voladizo con zona no optimizable.
3.1.1 Viga biapoyada de Michell. La viga biapoyada de Michell tiene dos apoyos detipo fijo (restricción del movimiento en ambas direcciones) ubicados a una altura H/2en las caras laterales y una relación de longitudes L/H = 1. La carga se aplica en ladirección vertical en el centro del dominio. El dominio se discretizó usando 100 elementosfinitos Q4 en ambas direcciones, para un total de 10000 elementos finitos y 20402 gradosde libertad.
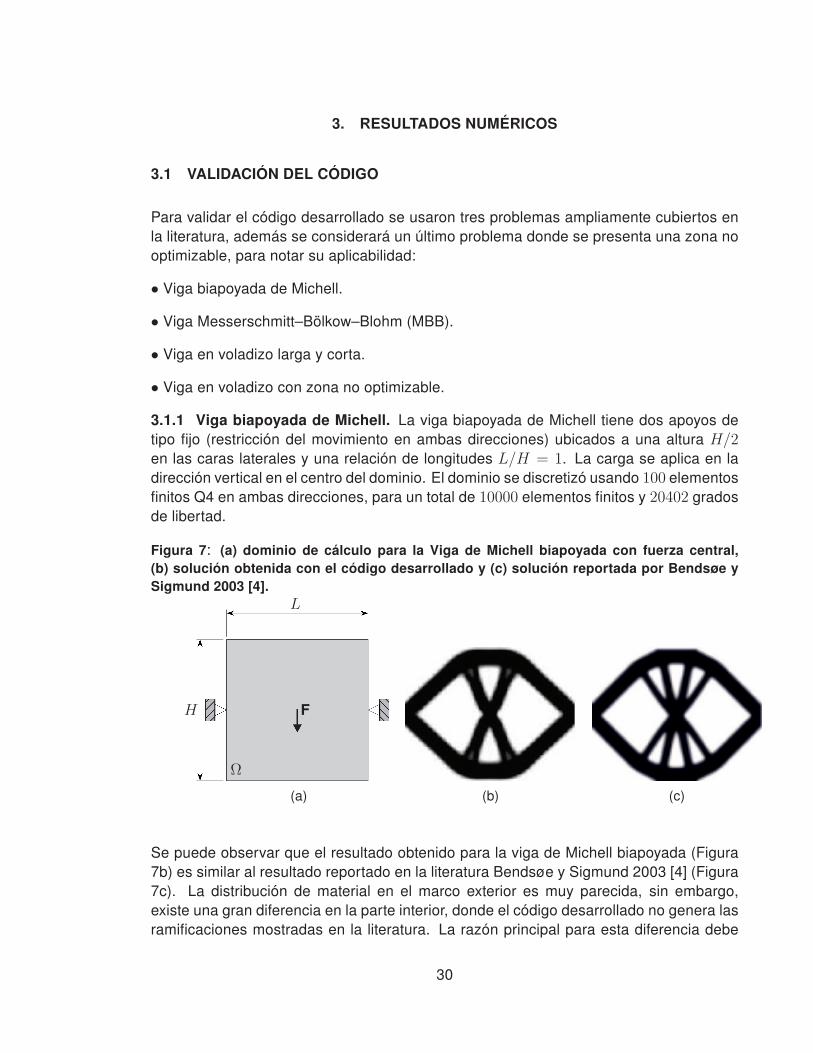
Figura 7: (a) dominio de cálculo para la Viga de Michell biapoyada con fuerza central,(b) solución obtenida con el código desarrollado y (c) solución reportada por Bendsøe ySigmund 2003 [4].
Ω
L
H F
(a) (b) (c)
Se puede observar que el resultado obtenido para la viga de Michell biapoyada (Figura7b) es similar al resultado reportado en la literatura Bendsøe y Sigmund 2003 [4] (Figura7c). La distribución de material en el marco exterior es muy parecida, sin embargo,existe una gran diferencia en la parte interior, donde el código desarrollado no genera lasramificaciones mostradas en la literatura. La razón principal para esta diferencia debe
30
ser las técnicas de solución usadas para el problema, pues el código desarrollado usaPLS y el resultado reportado en la literatura fue obtenido usando OC.
3.1.2 Viga Messerschmitt–Bölkow–Blohm (MBB). El segundo problema abordado esla viga Messerschmitt–Bölkow–Blohm, mejor conocida como la viga MBB por las siglasde la empresa aeronáutica alemana. Este tipo de viga hace parte del fuselaje de losaviones Airbus de pasajeros. La viga analizada tiene una relación de longitudes L/H =6 y dos apoyos ubicados en las esquinas inferiores, uno es de tipo fijo y el otro tipodeslizante. La fuerza aplica esta en la dirección vertical y se encuentra situada en elcentro del lado superior del dominio. El dominio fue discretizado con 300 elementosfinitos Q4 en la dirección x y 50 en la dirección y, para un total de 15000 elementos finitosy 30702 grados de libertad. Para este problema fue usada una fracción de volumen de0,3, que significa que el volumen final de la estructura es el 30% del volumen inicial.
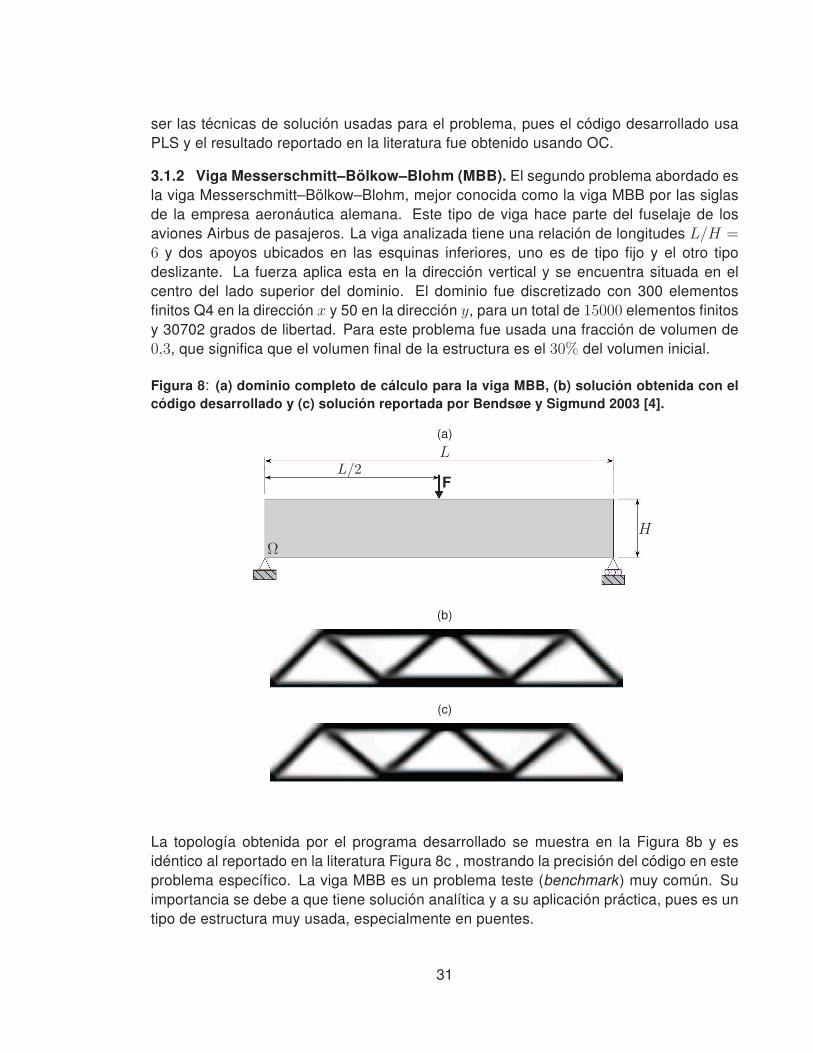
Figura 8: (a) dominio completo de cálculo para la viga MBB, (b) solución obtenida con elcódigo desarrollado y (c) solución reportada por Bendsøe y Sigmund 2003 [4].
(a)
Ω
L
H
FL/2
(b)
(c)
La topología obtenida por el programa desarrollado se muestra en la Figura 8b y esidéntico al reportado en la literatura Figura 8c , mostrando la precisión del código en esteproblema específico. La viga MBB es un problema teste (benchmark) muy común. Suimportancia se debe a que tiene solución analítica y a su aplicación práctica, pues es untipo de estructura muy usada, especialmente en puentes.
31

Cuando se espera que la estructura sea completamente simétrica, como es el caso dela viga MBB, el dominio puede reducirse a la mitad aplicando las condiciones de fronteraadecuadas. Esto permite una reducción significativa del costo computacional, que en loscomputadores actuales, se traduce en una reducción drástica del tiempo de cálculo.
Figura 9: (a) dominio reducido de cálculo para la viga MBB, (b) solución obtenida con elcódigo desarrollado y (c) solución reportada por Bendsøe y Sigmund 2003 [4].
(a)
Ω
L
H
F
(b)
(c)
La Figura 9 muestra la solución del problema de la viga MBB usando la mitad del do-minio. Son usados los mismos datos del problema anterior y los mismos parámetros desimulación. Se muestra el dominio de diseño, donde la simetría se fijó colocando apoyosdeslizantes en todo el lado izquierdo, lo que equivale a fijar todos los desplazamientosen x dejando libres todos desplazamientos en y. La carga vertical que se aplica a laestructura está ubicada en una esquina superior opuesta al apoyo de la parte inferior.En este caso, el número de elementos finitos es la mitad (7500) debido que cuenta conuna relación de longitudes L/H = 3.
En la Figura 9b, se puede ver que la solución obtenida con el código desarrollado esidéntica a la reportada en la literatura Figura 9c. Además, queda claro que es exacta-mente la mitad de la solución mostrada en la Figura 8 y la solución completa se puedeobtener simplemente adicionando la imagen espejo (simetría).
3.1.3 Viga en voladizo. El cuarto problema es la viga en voladizo, para dos casos
32
diferentes: larga L/H = 4 y corta L/H = 2. En este problema, la viga se encuentraempotrada en un extremo y sometida a una fuerza vertical en el centro del extremo libre,como se muestra en las Figuras 10a y 10b . El dominio fue discretizado en 160 elementosen la dirección x y 40 elementos en la dirección y, equivalente a 6400 elementos finitoscon 13202 grados de libertad, para el caso de la viga larga. Para la viga corta el dominiofue discretizado en 100 elementos en la dirección x y 50 elementos en la dirección y,equivalente a 5000 elementos finitos con 10302 grados de libertad.
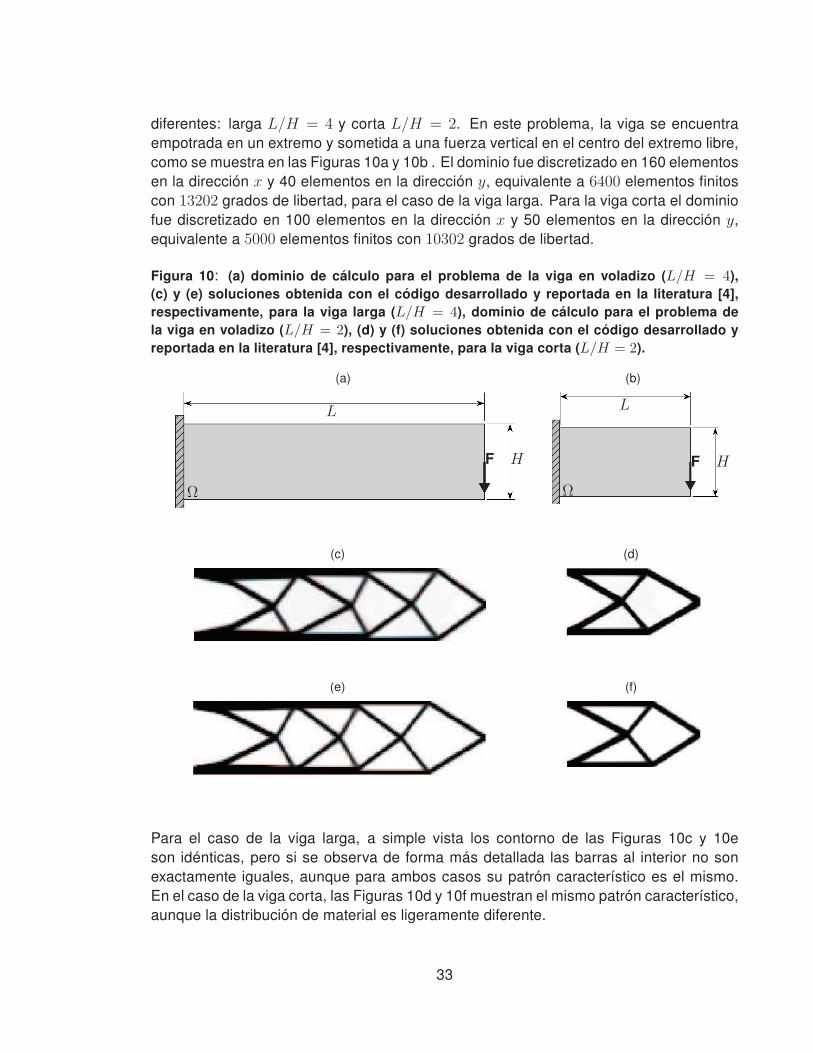
Figura 10: (a) dominio de cálculo para el problema de la viga en voladizo (L/H = 4),(c) y (e) soluciones obtenida con el código desarrollado y reportada en la literatura [4],respectivamente, para la viga larga (L/H = 4), dominio de cálculo para el problema dela viga en voladizo (L/H = 2), (d) y (f) soluciones obtenida con el código desarrollado yreportada en la literatura [4], respectivamente, para la viga corta (L/H = 2).
(a)
Ω
L
HF
(b)
Ω
L
HF
(c) (d)
(e) (f)
Para el caso de la viga larga, a simple vista los contorno de las Figuras 10c y 10eson idénticas, pero si se observa de forma más detallada las barras al interior no sonexactamente iguales, aunque para ambos casos su patrón característico es el mismo.En el caso de la viga corta, las Figuras 10d y 10f muestran el mismo patrón característico,aunque la distribución de material es ligeramente diferente.
33

3.1.4 Viga con zona no optimizable. El último problema es una viga que cuenta conuna parte del dominio no optimizable. En este problema (ver Figura 11), el área nooptimizable tiene forma de disco circular y está localizada a una distancia en el eje xde un cuarto de la longitud y en el eje y a la mitad de la altura, con un radio igual a unquinto de la altura r = H/5. Los apoyos son de tipo fijo y están situados en el interiordel disco, la carga es vertical aplicada en el centro del extremo libre. El dominio totales rectangular con una relación de longitudes de L/H = 4/3. Para este problema eldominio se ha discretizado en 320 elementos en la dirección x y 240 elementos en ladirección y, para un total de 76800 elementos finitos y 154722 grados de libertad. Fueusada una fracción de volumen del 0,3, sin sumar la fracción de volumen contenida enel disco.
Figura 11: (a) dominio de cálculo para el problema de la viga con zona no optimizable y (b)solución obtenida con el código desarrollado.
Ω
L
HF
(a) (b)
El programa desarrollado da como resultado una viga con una distribución de materialcoherente, buena parte distribuido en el apoyo, y el área no optimizable (el disco) man-tenida. Esta área no optimizable es una región del dominio donde el material no puedeser retirado, es decir, las variables de proyecto (pseudo densidades) dentro de esta áreason igualadas a uno en cada iteración (ρi = 1). Como los apoyos fijos se encuentrandentro, esta área no optimizable se convierte en un apoyo grande o distribuido.
Existe también la opción contraria, una área del dominio donde ningún material puede seradicionado. Esto se logra igualando las variables de proyecto a cero en cada iteración,creando un área vacía. Áreas vacías son necesarias en el diseño de partes mecánicas,especialmente estructurales. Por ejemplo, en el diseño de las costillas de alas de aviónse necesita obtener la máxima rigidez con el mínimo peso, pero, adicionalmente, senecesitan los orificios por donde circulen mangueras hidráulicas, cables eléctricos, etc.
34
3.2 RESULTADOS CON DIFERENTES PARÁMETROS
Los parámetros de cálculo más importantes del programa de optimización topológicaimplementado son los siguientes:
• Discretización.
• Factor de penalización (p).
• Fracción de volumen (V ).
• Radio de influencia del filtro (rmin).
En esta sección, se estudia el efecto que cada uno de estos parámetros tiene sobrela topología obtenida. El significado de cada uno de estos parámetros y los conceptosteóricos y matemáticos relacionados fueron explicados en los capítulos 1 y 2.
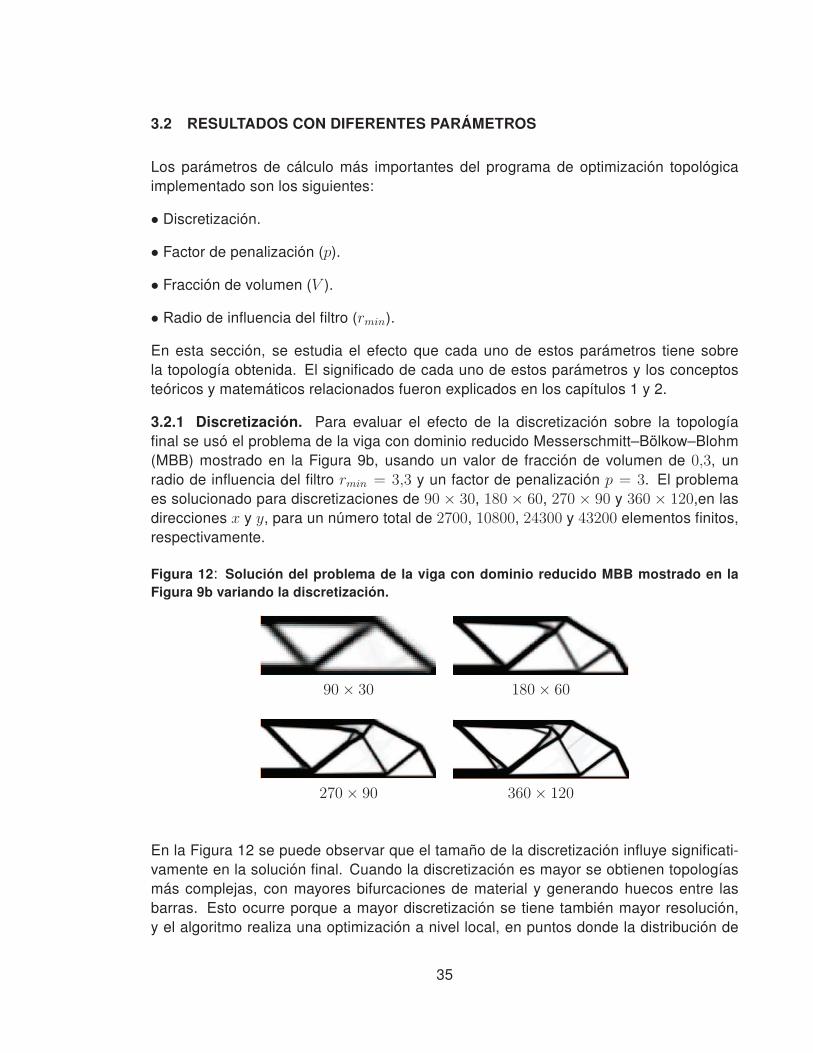
3.2.1 Discretización. Para evaluar el efecto de la discretización sobre la topologíafinal se usó el problema de la viga con dominio reducido Messerschmitt–Bölkow–Blohm(MBB) mostrado en la Figura 9b, usando un valor de fracción de volumen de 0,3, unradio de influencia del filtro rmin = 3,3 y un factor de penalización p = 3. El problemaes solucionado para discretizaciones de 90 × 30, 180 × 60, 270 × 90 y 360 × 120,en lasdirecciones x y y, para un número total de 2700, 10800, 24300 y 43200 elementos finitos,respectivamente.
Figura 12: Solución del problema de la viga con dominio reducido MBB mostrado en laFigura 9b variando la discretización.
90× 30 180× 60
270× 90 360× 120
En la Figura 12 se puede observar que el tamaño de la discretización influye significati-vamente en la solución final. Cuando la discretización es mayor se obtienen topologíasmás complejas, con mayores bifurcaciones de material y generando huecos entre lasbarras. Esto ocurre porque a mayor discretización se tiene también mayor resolución,y el algoritmo realiza una optimización a nivel local, en puntos donde la distribución de
35
esfuerzos presenta más variaciones. Se puede concluir que la solución final del diseñoes dependiente de la discretización.
En la actualidad una discusión en los problemas de optimización topológica por los au-tores, es la dependencia de la malla, debido que un mayor refinamiento generar unaestructura con un mayor número de agujeros, lo cual es un problema porque hace inex-istente una solución. Bendsøe y Sigmund 2003 [4], plantean una forma realmente eficazy sin complicaciones para lograr independencia de la malla, que es el uso del radio deinfluencia del filtro rmin como un porcentaje de la altura H del diseño del dominio. Elefecto del rmin sera evaluado más adelante.
3.2.2 Factor de penalización.
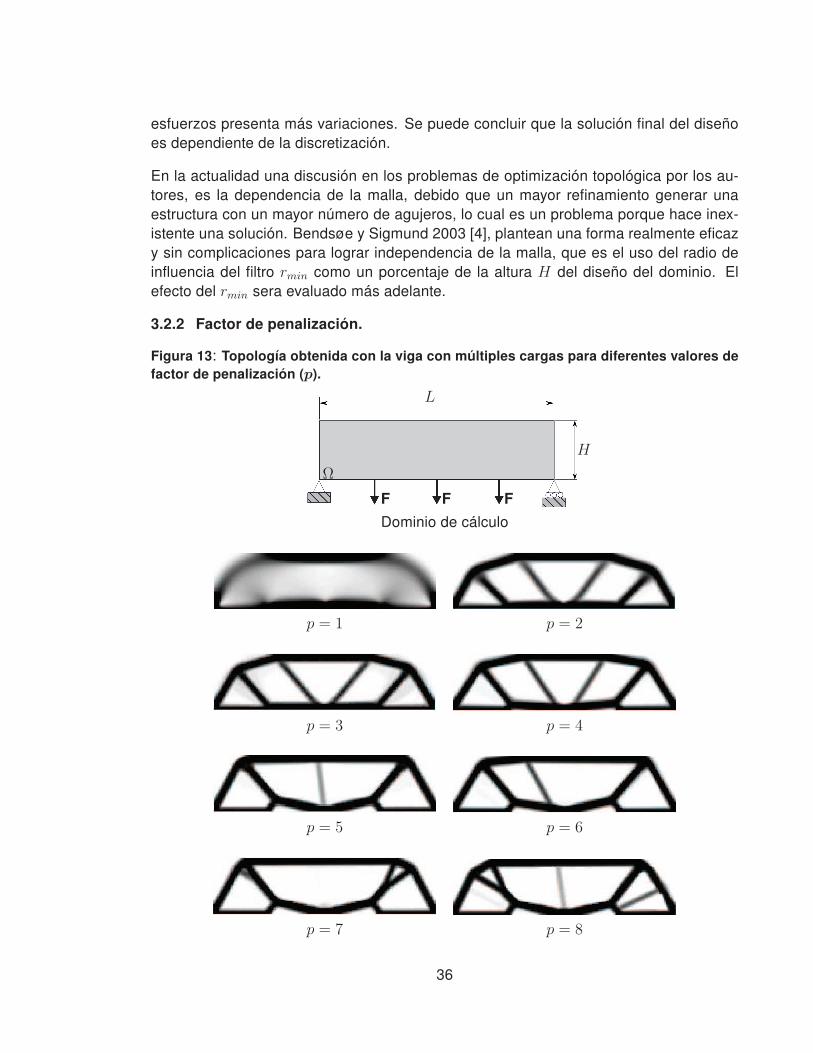
Figura 13: Topología obtenida con la viga con múltiples cargas para diferentes valores defactor de penalización (p).
Ω
L
H
F F F
Dominio de cálculo
p = 1 p = 2
p = 3 p = 4
p = 5 p = 6
p = 7 p = 8
36
El factor de penalización es un valor que utiliza el modelo SIMP para que los valores inter-medios de densidades de cada elemento sean penalizados, es decir, se acerquen más alos extremos. Se debe recordar que las variables de proyecto (pseudo densidades) de-berían tomar solamente dos valores discretos: 1 para la presencia de material y 0 parala ausencia total, sin embargo, la solución del problema con esta variable discreta es ex-tremadamente difícil. Por esta razón, las variables de proyecto se convierten a variablescontinuas, pero se aplica la penalización para que los valores intermedios tiendan hacialos extremos y lograr la convergencia al tener un espacio continuo de solución.
Para evaluar la influencia del factor de penalización sobre la topología final, fue ana-lizado el caso de una viga que tiene una relación longitudes de L/H = 4 y dos apoyosubicados en las esquinas inferiores, uno es de tipo fijo y el otro tipo deslizante, ademáscuenta con tres cargas equidistantes a L/4 aplicadas en la dirección vertical en el ladoinferior, como se muestra en la Figura 13 Dominio del cálculo. El dominio se discretizócon 160×40 elementos finitos (13202 grados de libertad), rmin = 3 y fracción de volumende 0,3. El problema fue solucionado para valores del factor de penalización entre 1 y 8.
Como se puede observar en la Figura 13, para un valor de penalización de 1 el problemade la escala de grises es muy grande y no se obtiene una solución bien definida. Paravalores del factor de penalización de 2, 3 y 4, se obtienen soluciones bien definidas y conpoca escala de grises, además, se puede decir que la solución es la misma y presentasimetría. La literatura [3] recomienda un valor de p = 3 y se puede ver que en este casose presentan las barras interiores más definidas y también es posible reducir el dominioa la mitad. Para valores entre p = 5 y p = 8, se obtienen topologías diferentes, donde elmarco exterior es dominante. Además, aparecen nuevamente problemas localizados deescala de grises, y también los contornos son asimétricos. Esta asimetría, cuya causano está del todo clara, no sería visible si el estudio del efecto del factor de penalizaciónse realiza únicamente con la mitad del dominio.
3.2.3 Fracción de volumen. La fracción de volumen (V ) es un parámetro que tiene unafuerte influencia sobre la topología final, pues determina el volumen, y por consiguiente lamasa, final que tendrá la estructura. En cuestiones de diseño, si se desea una estructuracon peso reducido, V debe tener valores pequeños. En caso contrario, cuando V tomavalores grandes, se conservara más cantidad de material obteniendo estructuras másrobustas y pesadas. La fracción de volumen, en teoría, puede tomar valores entre 0 y 1,pero estos valores extremos no tienen sentido, pues en un caso se eliminaría totalmenteel material y no habría estructura, en el otro caso, la estructura final sería el mismodominio inicial de diseño.
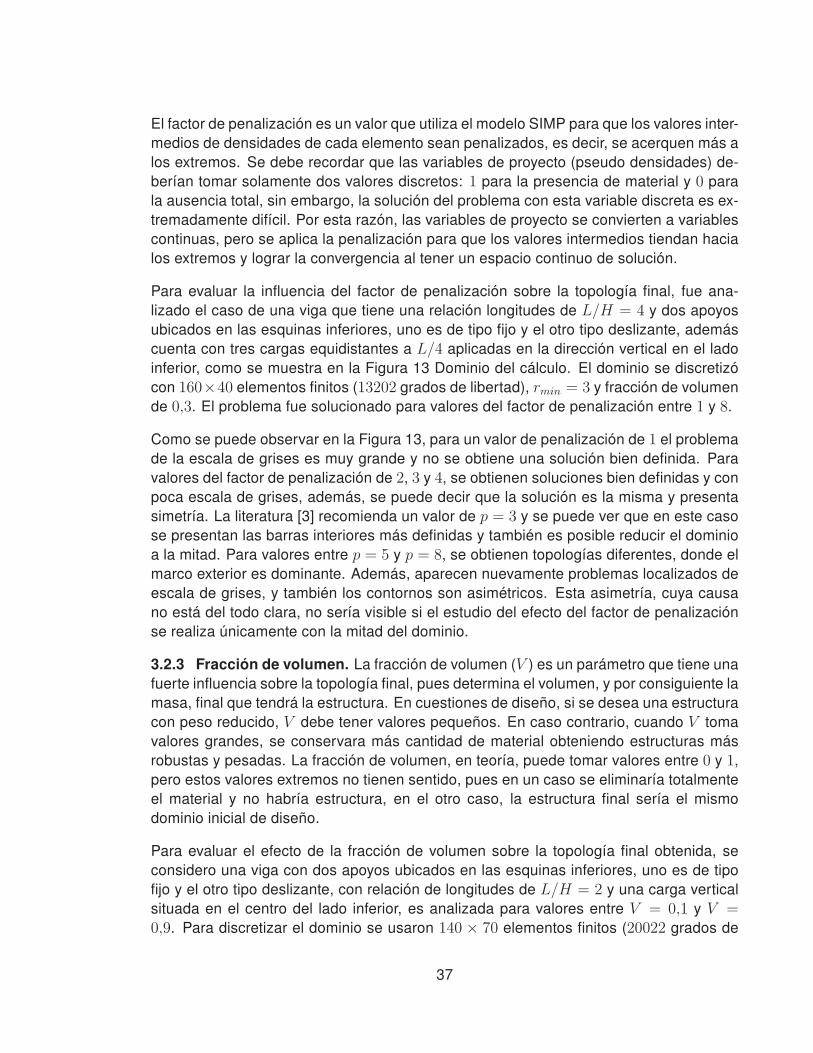
Para evaluar el efecto de la fracción de volumen sobre la topología final obtenida, seconsidero una viga con dos apoyos ubicados en las esquinas inferiores, uno es de tipofijo y el otro tipo deslizante, con relación de longitudes de L/H = 2 y una carga verticalsituada en el centro del lado inferior, es analizada para valores entre V = 0,1 y V =0,9. Para discretizar el dominio se usaron 140 × 70 elementos finitos (20022 grados de
37
libertad), p = 3 y rmin = 3.
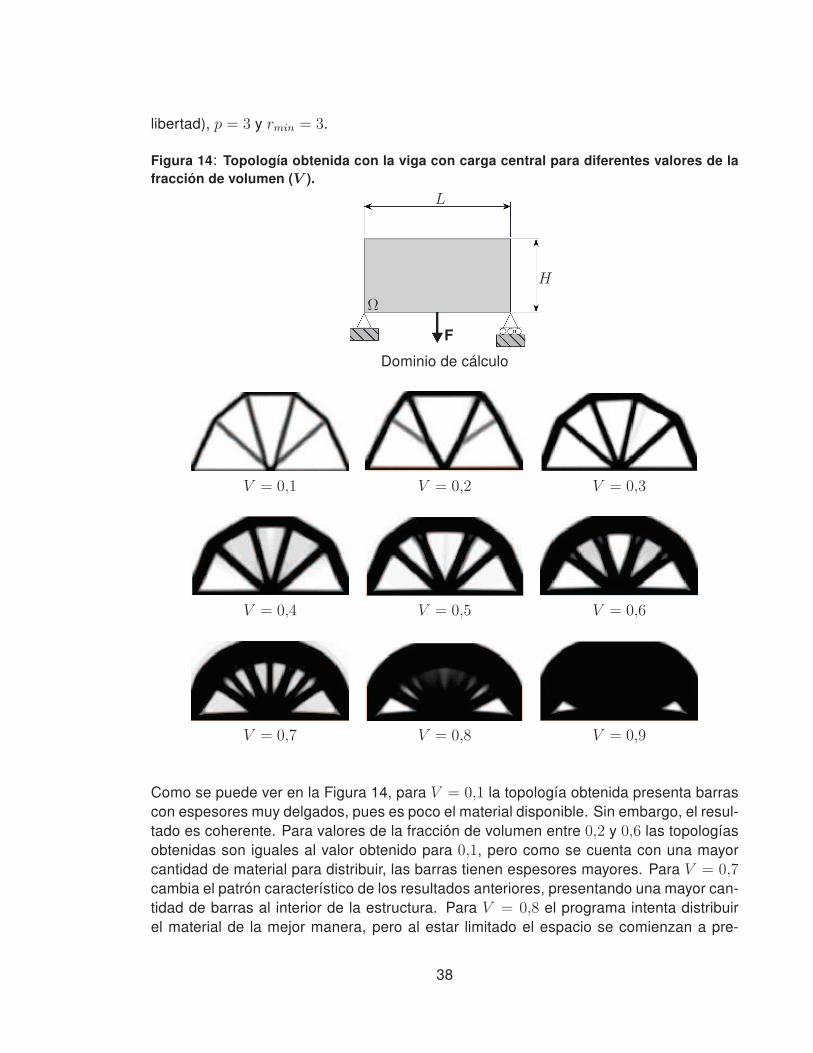
Figura 14: Topología obtenida con la viga con carga central para diferentes valores de lafracción de volumen (V ).
Ω
L
H
F
Dominio de cálculo
V = 0,1 V = 0,2 V = 0,3
V = 0,4 V = 0,5 V = 0,6
V = 0,7 V = 0,8 V = 0,9
Como se puede ver en la Figura 14, para V = 0,1 la topología obtenida presenta barrascon espesores muy delgados, pues es poco el material disponible. Sin embargo, el resul-tado es coherente. Para valores de la fracción de volumen entre 0,2 y 0,6 las topologíasobtenidas son iguales al valor obtenido para 0,1, pero como se cuenta con una mayorcantidad de material para distribuir, las barras tienen espesores mayores. Para V = 0,7cambia el patrón característico de los resultados anteriores, presentando una mayor can-tidad de barras al interior de la estructura. Para V = 0,8 el programa intenta distribuirel material de la mejor manera, pero al estar limitado el espacio se comienzan a pre-
38

sentar problemas de escala de grises, dificultando su interpretación. Por último, paraV = 0,9 se conserva prácticamente todo el material, como era de esperado. Además sepuede observar que todas las topologías presentan simetría, indicando que el dominioes posible reducirlo a la mitad. Pero como se pretende estudiar el efecto de la fracción devolumen no se sabe con exactitud la influencia sobre el diseño final, por eso se considerael dominio completo.
3.2.4 Radio de influencia del filtro.
Figura 15: Topología obtenida con la viga en voladizo con carga en la esquina para difer-entes valores del radio de influencia del filtro (rmin).
Ω
L
H
FDominio de cálculo
rmin = 1,0 rmin = 1,5 rmin = 2,0
rmin = 2,5 rmin = 3,0 rmin = 3,5
rmin = 4,0 rmin = 4,5 rmin = 5,0
El filtro es usado para eliminar el problema de las inestabilidades tipo ajedrez en latopología final. El parámetro de este filtro es llamado radio de influencia del filtro (rmin),
39
cuyo significado ya fue explicado en la sección 2.3. Para mostrar el efecto de esteparámetro se usó el problema de la viga en voladizo de la Figura 15 con relación delongitudes L/H = 2, para p = 3 y V = 0,4. El dominio fue discretizado usando 200×100elementos finitos (40602 grados de libertad).
El rmin es un parámetro muy importante en el código de optimización topológica, influyeen la rutina del filtro y su resultado es notable en la topología final. Para rmin = 1,0 sepresenta el problema de la inestabilidad del ajedrez y es casi imposible la interpretaciónde los resultados, esto ocurre porque el algoritmo no alcanza a considerar los elementosvecinos y la rutina de filtrado, encargada de reducir estas grandes diferencias en laspseudo densidades de elementos vecinos, simplemente no actúa. Para rmin = 1,5ya no se presenta el problema de inestabilidad de ajedrez y el material se distribuyepresentando un gran cantidad de bifurcaciones con barras delgadas. Los resultadospara rmin = 2,0 y rmin = 2,5 son muy similares. Para los contorno restante se presentaun patrón característicos para todos, aunque no son los mismos resultados son muysimilares, el cual opta por unir las barras, evitando las ramificaciones de material y asípresentar barras con un mayor espesor. Un rmin = 1,5 es suficiente para evitar lasinestabilidades de ajedrez y valores mayores reducen la optimización a nivel local, puesaumenta la cantidad de valores vecinos promediados, haciendo los contornos de lasbarras cada vez menos definidos (bordes difuminados).
3.3 CONVERGENCIA
En esta sección se muestra el comportamiento característico de la curva de convergen-cia de la optimización topológica, es decir, el valor de la función objetivo (c) en función delnúmero de iteraciones. También son mostradas las topologías parciales de la estructura,hasta llegar a la convergencia del problema y la topología final.
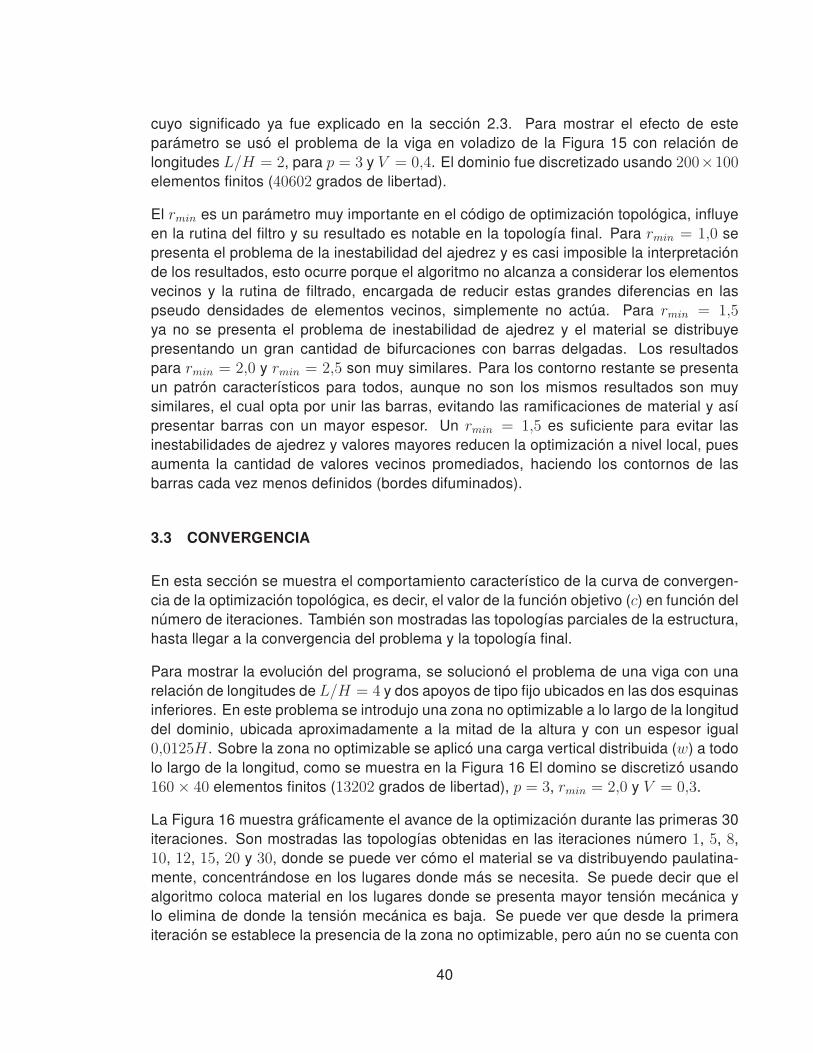
Para mostrar la evolución del programa, se solucionó el problema de una viga con unarelación de longitudes de L/H = 4 y dos apoyos de tipo fijo ubicados en las dos esquinasinferiores. En este problema se introdujo una zona no optimizable a lo largo de la longituddel dominio, ubicada aproximadamente a la mitad de la altura y con un espesor igual0,0125H. Sobre la zona no optimizable se aplicó una carga vertical distribuida (w) a todolo largo de la longitud, como se muestra en la Figura 16 El domino se discretizó usando160× 40 elementos finitos (13202 grados de libertad), p = 3, rmin = 2,0 y V = 0,3.
La Figura 16 muestra gráficamente el avance de la optimización durante las primeras 30iteraciones. Son mostradas las topologías obtenidas en las iteraciones número 1, 5, 8,10, 12, 15, 20 y 30, donde se puede ver cómo el material se va distribuyendo paulatina-mente, concentrándose en los lugares donde más se necesita. Se puede decir que elalgoritmo coloca material en los lugares donde se presenta mayor tensión mecánica ylo elimina de donde la tensión mecánica es baja. Se puede ver que desde la primeraiteración se establece la presencia de la zona no optimizable, pero aún no se cuenta con
40
la presencia de otro material. En la iteración 5 se genera las primeras zonas donde se vaa concentrar material, presentando escala de grises y sin comunicación entre ellas. Enla iteración 8 disminuyen la escala de grises, estableciendo ya la presencia de materialen los apoyos y en otras zonas,se cuenta con presencia de zonas comunicadas. En laiteración 10 se forma un arco atravesando la zona no optimizable y terminando en losapoyos, aun se presentan escalas de grises. La iteración 12 el arco está más definido ycontinúan disminuyendo la escala de grises. En la iteración 15 se comienzan a generarpresencias de material en el interior del arco uniendo este con la zona no optimizable, enlas siguientes iteraciones el programa sigue eliminando la escala de grises y comienzana definir el diseño final al interior del arco.
Figura 16: Topología obtenida con la viga con carga distribuida para diferentes valores deiteración.
Ω
L
Hw
Dominio de diseño
It = 1 It = 5
It = 8 It = 10
It = 12 It = 15
It = 20 It = 30
41
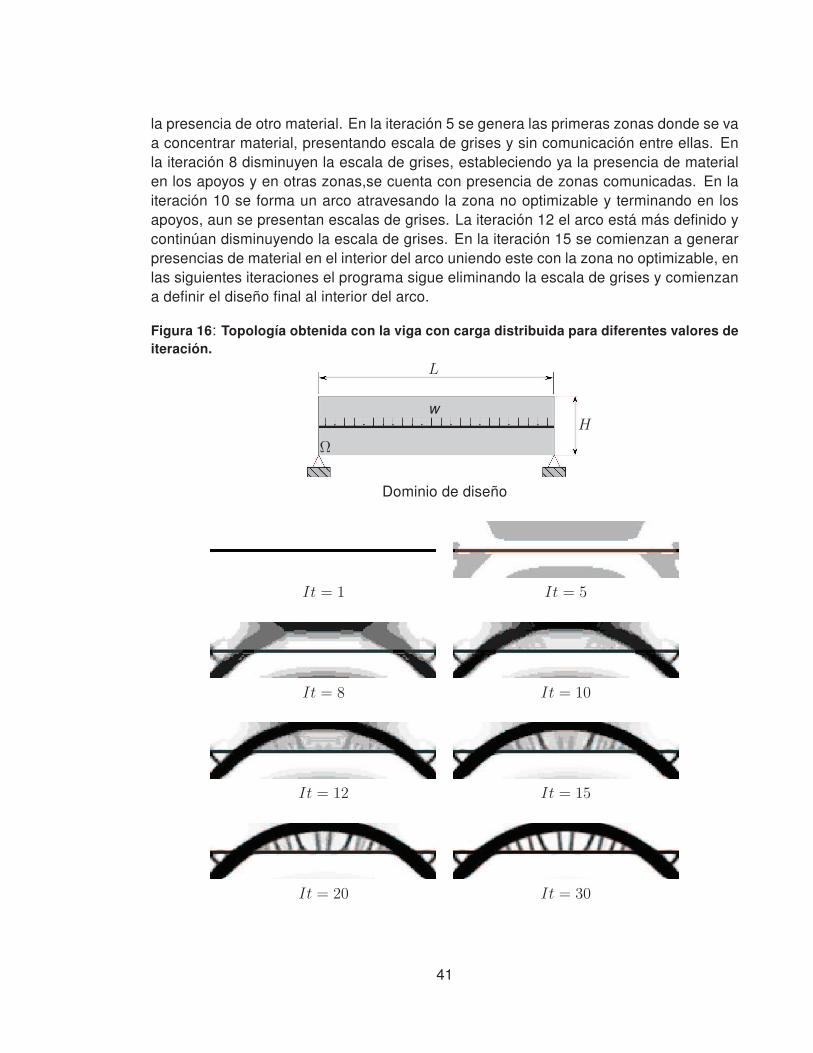
La Figura 17 muestra la curva de convergencia del problema de optimización topológicade la Figura 16 El valor de la función objetivo, en este caso la energía de distorsión,inicia con un valor grande y va descendiendo a medida que avanza la simulación, hastaestabilizarse en un determinado valor. Este valor representa la mínima energía de de-formación y la solución del problema corresponde al conjunto de todas la variables deproyecto (ρi) en ese momento.
Figura 17: Gráfico de la curva de convergencia mostrando la función objetivo (energía dedeformación) en función del número de iteraciones.
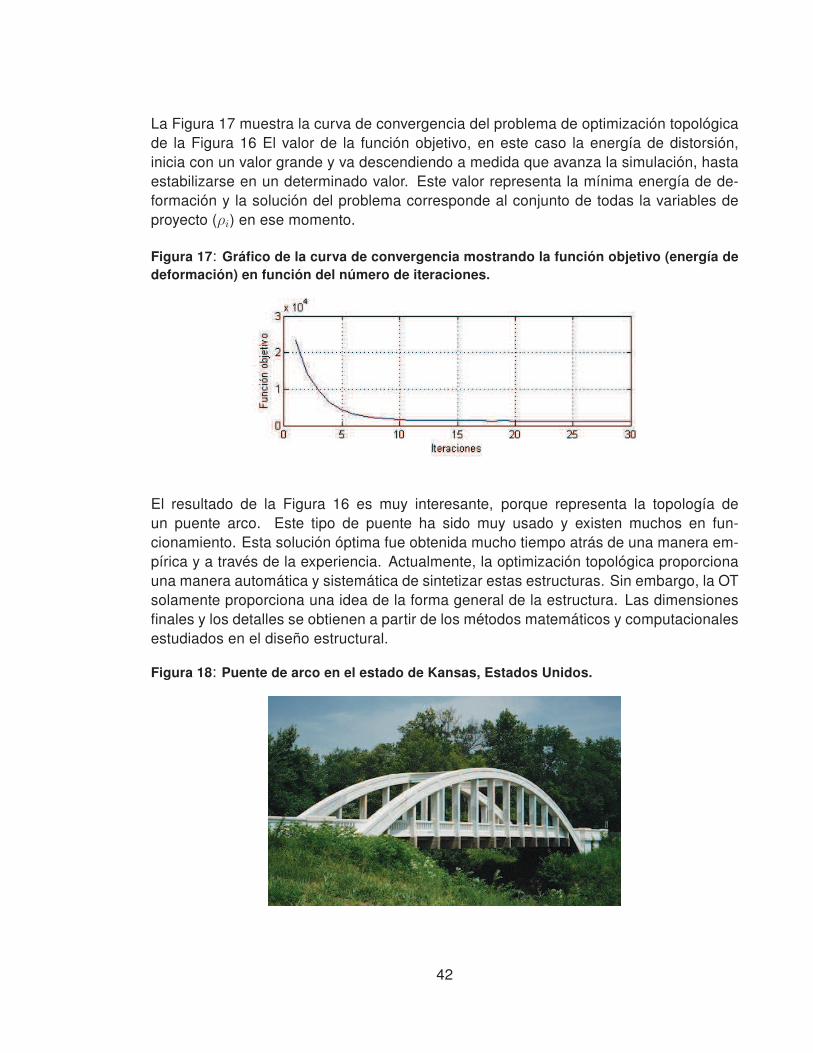
El resultado de la Figura 16 es muy interesante, porque representa la topología deun puente arco. Este tipo de puente ha sido muy usado y existen muchos en fun-cionamiento. Esta solución óptima fue obtenida mucho tiempo atrás de una manera em-pírica y a través de la experiencia. Actualmente, la optimización topológica proporcionauna manera automática y sistemática de sintetizar estas estructuras. Sin embargo, la OTsolamente proporciona una idea de la forma general de la estructura. Las dimensionesfinales y los detalles se obtienen a partir de los métodos matemáticos y computacionalesestudiados en el diseño estructural.
Figura 18: Puente de arco en el estado de Kansas, Estados Unidos.
42

4. DISEÑO MECÁNICO
El diseño de componentes mecánicos es una actividad donde se complementan la ex-periencia del diseñador y los conceptos teóricos de la mecánica. El diseño de un compo-nente mecánico es una tarea compleja, llevada a cabo por ingenieros y usando los méto-dos a su alcance. El método de optimización topológica encuentra la solución de prob-lemas de diseño mecánico encontrando topologías óptimas de una manera automática.
En este capítulo final, el método de optimización topológica será aplicado en el diseño decomponentes de unión mecánica, muy comunes en estructuras y máquinas, tales comogrúas, puentes, automóviles, barcos, aviones, etc. La importancia de la OT se debe a laposibilidad de generar piezas mecánicas de peso reducido, que disminuye la cantidadde material, el consumo de combustible, el consumo de energía eléctrica, la disminuciónde gases contaminantes, entre otras ventajas. Factores importantes a considerar en eldiseño de componentes mecánicos.
Se considera el componente mecánico de unión en la Figura 19, diseñado para soportaruna carga vertical de 5340 N, aplicada en el agujero inferior. Los dos agujeros superioresse encuentran restringidos al posible movimiento. El material del componente es chapade acero estructural A36 de 10 mm de espesor, que cuenta con un límite de fluenciade 250 MPa. Usando el software SolidWorks se creó un modelo CAD del componentemecánico, de donde se obtuvo un volumen del componente de 75224.5mm3. Como ladensidad del acero A36 es de 7850 kg/m3, el peso es de 590,5 gramos.
Figura 19: Dimensiones del componente mecánico (medidas en milímetros).
Para aplicar el método de optimización topológica al componente mecánico, se defineun dominio rectangular donde un milímetro equivale a un elemento finito, es decir, setiene una discretización de 160 × 80 elementos finitos. El dominio posee tres zonas no
43
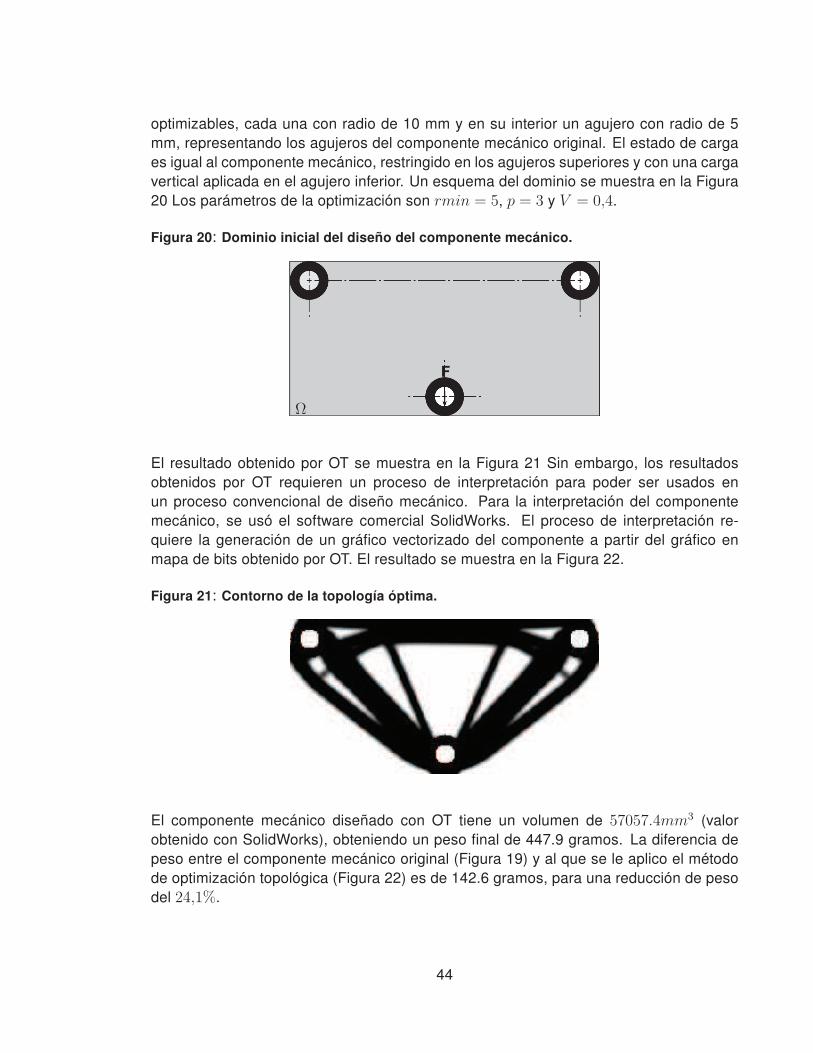
optimizables, cada una con radio de 10 mm y en su interior un agujero con radio de 5mm, representando los agujeros del componente mecánico original. El estado de cargaes igual al componente mecánico, restringido en los agujeros superiores y con una cargavertical aplicada en el agujero inferior. Un esquema del dominio se muestra en la Figura20 Los parámetros de la optimización son rmin = 5, p = 3 y V = 0,4.
Figura 20: Dominio inicial del diseño del componente mecánico.
Ω
F
El resultado obtenido por OT se muestra en la Figura 21 Sin embargo, los resultadosobtenidos por OT requieren un proceso de interpretación para poder ser usados enun proceso convencional de diseño mecánico. Para la interpretación del componentemecánico, se usó el software comercial SolidWorks. El proceso de interpretación re-quiere la generación de un gráfico vectorizado del componente a partir del gráfico enmapa de bits obtenido por OT. El resultado se muestra en la Figura 22.
Figura 21: Contorno de la topología óptima.
El componente mecánico diseñado con OT tiene un volumen de 57057.4mm3 (valorobtenido con SolidWorks), obteniendo un peso final de 447.9 gramos. La diferencia depeso entre el componente mecánico original (Figura 19) y al que se le aplico el métodode optimización topológica (Figura 22) es de 142.6 gramos, para una reducción de pesodel 24,1%.
44
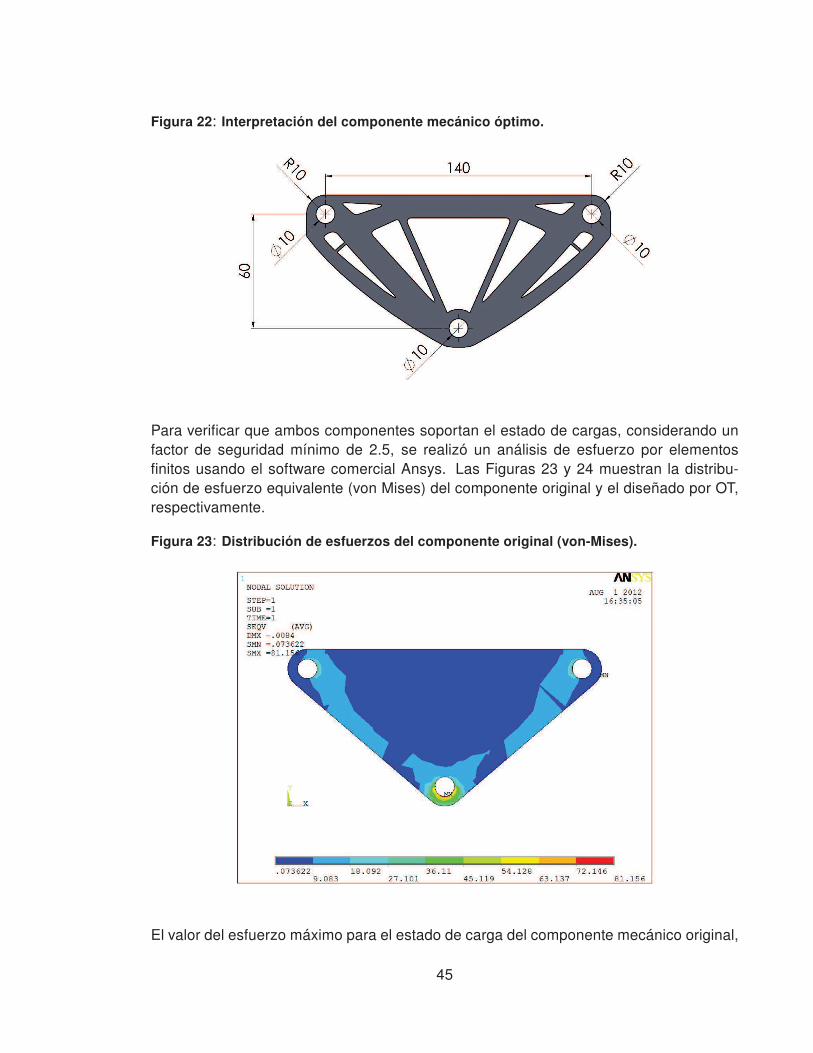
Figura 22: Interpretación del componente mecánico óptimo.
Para verificar que ambos componentes soportan el estado de cargas, considerando unfactor de seguridad mínimo de 2.5, se realizó un análisis de esfuerzo por elementosfinitos usando el software comercial Ansys. Las Figuras 23 y 24 muestran la distribu-ción de esfuerzo equivalente (von Mises) del componente original y el diseñado por OT,respectivamente.
Figura 23: Distribución de esfuerzos del componente original (von-Mises).
El valor del esfuerzo máximo para el estado de carga del componente mecánico original,
45
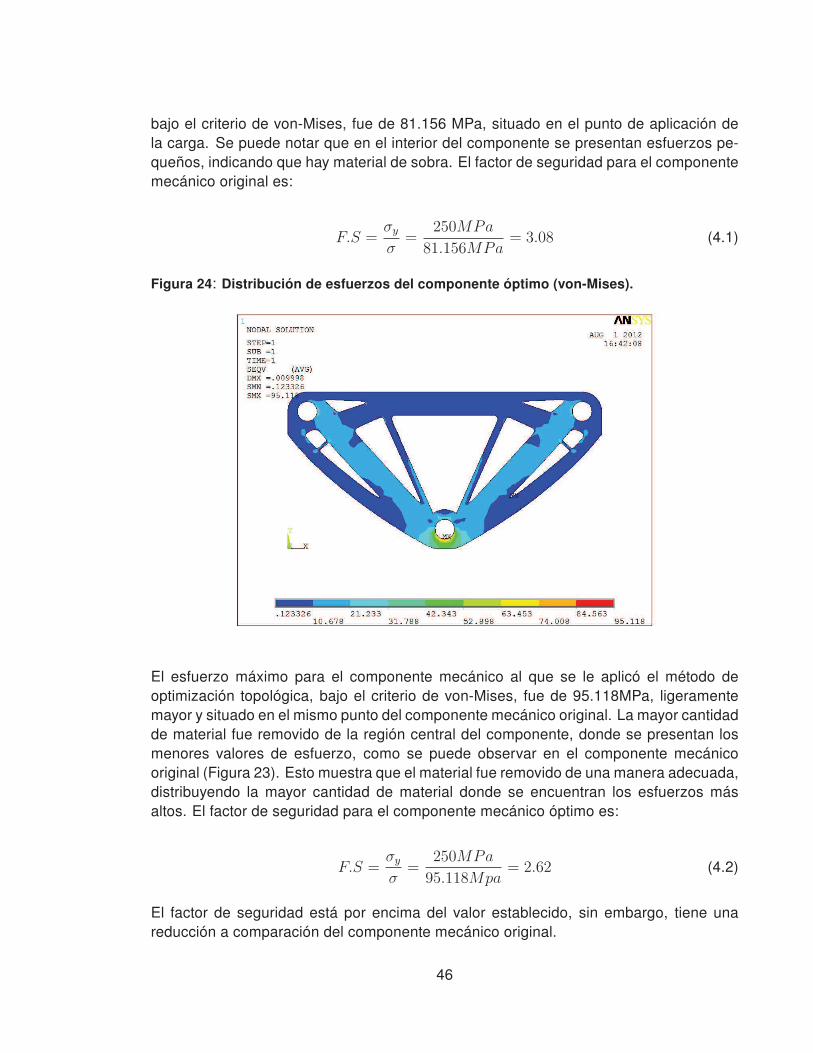
bajo el criterio de von-Mises, fue de 81.156 MPa, situado en el punto de aplicación dela carga. Se puede notar que en el interior del componente se presentan esfuerzos pe-queños, indicando que hay material de sobra. El factor de seguridad para el componentemecánico original es:
F.S =σy
σ=
250MPa
81.156MPa= 3.08 (4.1)
Figura 24: Distribución de esfuerzos del componente óptimo (von-Mises).
El esfuerzo máximo para el componente mecánico al que se le aplicó el método deoptimización topológica, bajo el criterio de von-Mises, fue de 95.118MPa, ligeramentemayor y situado en el mismo punto del componente mecánico original. La mayor cantidadde material fue removido de la región central del componente, donde se presentan losmenores valores de esfuerzo, como se puede observar en el componente mecánicooriginal (Figura 23). Esto muestra que el material fue removido de una manera adecuada,distribuyendo la mayor cantidad de material donde se encuentran los esfuerzos másaltos. El factor de seguridad para el componente mecánico óptimo es:
F.S =σy
σ=
250MPa
95.118Mpa= 2.62 (4.2)
El factor de seguridad está por encima del valor establecido, sin embargo, tiene unareducción a comparación del componente mecánico original.
46
5. CONCLUSIONES
En este trabajo fue implementada la técnica de optimización topológica aplicada a lasolución del problema de máxima rigidez con restricción de volumen en dominios bidi-mensionales. Fueron discutidos los conceptos teóricos más relevantes y fue desarrolladoun código en Matlab para solucionar el problema. Este código logró reproducir exitosa-mente muchos de los resultados reportados en la literatura, mostrando la validez delenfoque usado. También fue analizado el efecto que tienen los parámetros de diseñosobre la estructura final, resultados que muestran mucha utilidad en la etapa de diseño,pues de ellos depende en gran medida la topología final de la estructura.
La optimización topológica mostró ser una herramienta útil en el diseño de elementoscon peso reducido, sea para el rediseño de elementos existentes o en el caso de nuevoselementos. El elemento de unión que fue rediseñado por optimización topológica mostróuna reducción importante en el peso, sacrificando muy poco el factor de seguridad.
Actualmente se cuenta con herramientas de cómputo avanzadas y lenguajes de progra-mación de alto nivel que facilitan la implementación de los algoritmos. Además, existenmétodos de fabricación modernos que permiten la construcción de piezas complejas,como las obtenidas por optimización topológica. Pero siempre se debe tener presente larelación Costo/beneficio para considerar la aplicación de la técnica.
Finalmente, se puede concluir que la optimización topológica es un tema de investigacióninteresante. Como se trata de una técnica relativamente nueva, aún queda mucho pordescubrir y constantemente se reportan en la literatura nuevas aplicaciones.
47
TRABAJOS FUTUROS
Debido al alto costo computacional, se requiere realizar una optimización del algoritmodesarrollado para mejorar su rendimiento y reducir el tiempo de cálculo. Por ejemplo,usando un lenguaje de programación, como C o Fortran, en lugar de Matlab.
Desarrollar un algoritmo que permita la interpretación de los resultados y la generaciónde un gráfico vectorizado que pueda ser importado en un software de CAD o de análisispor elementos finitos.
Sería interesante integrar el código desarrollado con un software comercial de elemen-tos finitos, para realizar el post-procesamiento de la topología y facilitar el análisis deresistencia mecánica.
Implementar un nuevo código que permita solucionar el problema de máxima rigidez conrestricción de volumen en dominios tridimensionales (3D).
48
BIBLIOGRAFÍA
[1] taylor series. En internet: http://www.mathworld.com/taylorseries.html.
[2] Avila, J. F. Método de karmarkar. Revista de Matematica: Teoría y Aplicaciones 2,1 (1995), 45–55.
[3] Bendsøe, M. P., and Kikuchi, N. Generating optimal topologies in structural designusing a homogenization method. Computer Methods in Applied Mechanics and
Engineering 71, 2 (1988), 197 – 224.
[4] Bendsøe, M. P., and Sigmund, O. Topology Optimization: Theory, Methods and
Applications. Springer Verlag, Berlin, 2003.
[5] Carbonari, R. C. Projeto de atuadores piezelétricos flextensionais usando o métodode otimização topológica. Master’s thesis, Escola Politécnica da Universidade deSão Paulo, 2003.
[6] Chapra, S. C., and Canale, R. P. Métodos Numéricos para Ingenieros. Mc Graw-Hill,México, 2011.
[7] Chaves, E., and Mínguez, R. Mecánica Computacional en la Ingeniería con aplica-
ciones en Matlab. Universidad de Castilla-La Mancha, Espana, 2010.
[8] Huang, X., and Xie, M. Evolutionary Topology Optimization of Continuum Structures:
Methods and Applications. John Wiley & Sons Ltd., Sussex, 2010.
[9] Kikuchi, N., Nishiwaki, S., Fonseca, L. S. O., and Silva, E. C. N. Design optimizationmethod for compliant mechanisms microstructure. Comput.Methods Appl. Mech.
Engrg. 151 (1998), 401–417.
[10] Kota, S., Joo, J., Li, Z., Rodgers, S. M., and Sniegowski, J. Design of compliantmechanisms: Applications to mems. Analog Integrated Circuits and Signal Pro-
cessing 29 (2001), 7–15.
[11] Larsen, U. D., Sigmund, O., and Bouwstra, S. Design and fabrication of compliantmicromechanisms and structures with negative poisson’s ratio. Journal of Micro-
electromechanical Systems 6, 2 (1997), 99–106.
[12] Lin, J., Luo, Z., and Tong, L. A new multi-objective programming scheme for topol-ogy optimization of compliant mechanisms. Struct Multidisc Optim 40 (2010), 241–255.
[13] Logan, D. L. A First Course in the Finite Element Method. THOMSON, Canada,2007.
49
[14] Maute, K., and Allen, M. Conceptual design of aeroelastic structures by topologyoptimization. Struct Multidisc Optim 27 (2004), 27–42.
[15] Mröz, Z., and Rozvany, G. I. N. Optimal design of structures with variable supportconditions. Journal of Optimization Theory and Applications 15, 1 (1975), 85–101.
[16] Nishiwaki, S., Frecker, M. I., Min, S., and Kikuchi, N. Topology optimization of com-pliant mechanisms using the homogenization method. Int. J. Numer. Meth. Engng.
42 (1998), 535–559.
[17] Pingen, G., Evgrafov, A., and Maute, K. Topology optimization of flow domains usingthe lattice boltzmann method. Struct Multidisc Optim 34 (2007), 507–524.
[18] Pragera, W., and Rozvany, G. I. N. Optimal layout of grillages. Journal of Structural
Mechanics 5, 1 (1977), 1–18.
[19] Rubio, W. M., Silva, E. C. N., and Nishiwaki, S. Piezoresistive sensor design usingtopology optimization. Struct Multidisc Optim 36 (2008), 571–583.
[20] Sigmund, O., and Clausen, P. M. Topology optimization using a mixed formulation:An alternative way to solve pressure load problems. Comput. Methods Appl. Mech.
Engrg. 196 (2007), 1874–1889.
[21] Suzuki, K., and Kikuchi, N. A homogenization method for shape and topology opti-mization. Computer Methods in Applied Mechanics and Engineering 93, 3 (1991),291 – 318.
[22] Svanberg, K. The method of moving asymptotes – a new method for structuraloptimization. Int. J. Numer. Meth. Engng. 24 (1987), 359–373.
[23] Timoshenko, S., and Goodier, J. Theory of Elasticity. Mc Graw-Hill, New York, 1970.
[24] Yin, L., and Yang, W. Optimality criteria method for topology optimization undermultiple constraints. Computers and Structures 79 (2001), 1839–1850.
50

ANEXOS
A. Esfuerzo plano
Tensión plana
El estado de tensión plana se presenta cuando el espesor (z) es muy pequeño com-parado con las dimensiones laterales (x y y), además, las cargas se encuentran apli-cadas en el plano que forman estas dimensiones laterales (plano xy), como se puedeobservar en la Figura 25; en estas condiciones, las componentes de tensión en la direc-ción del espesor σz, τxz y τyz se hacen cero y solo se consideran las componentes detensión σx, σy y τxy.
Figura 25: Estado de tensión plana .
x z
yy
Fuente: Adaptado de Timoshenko y Goodier [23].
Para el estado de tensión plana, la matriz del material esta dada por:
D =E
1− υ2
1 υ 0υ 1 0
0 0(1− υ)
2
, (A.1)
donde E y ν son el modulo de elasticidad y el coeficiente de Poisson, respectivamente.
Deformación plana
En el estado de deformación plana, la dimensión del eje prismático (z) es mucho másgrande con respecto a las otras dimensionas, como se muestra en la Figura 26. La
51

fuerza aplicada, perpendicular al eje prismático, no varía a lo largo de la longitud. Enestas condiciones, las deformaciones εz, γxz y γyz son cero.
Figura 26: Estado de deformación plana .
x x
z
yy
Fuente: Adaptado de Timoshenko y Goodier [23].
Para el estado de deformación plana su matriz del material esta dada por:
D =E(1− υ)
(1 + υ)(1− 2υ)
1υ
1− υ0
υ
1− υ1 0
0 0(1− 2υ)
2(1− υ)
(A.2)
La matriz D para ambos casos de esfuerzo plano se estructura de la siguiente forma:
D =
D1 D2 0D2 D1 00 0 D3
(A.3)
donde D1, D2 y D3 dependen si se tiene un estado de tensión o deformación plana:
Tensión plana:
D1 =E
1− υ2D2 =
Eυ
1− υ2D3 =
E
2(1 + υ)(A.4)
Deformación plana:
52

D1 =E(1− υ)
(1 + υ)(1− 2υ)D2 =
Eυ
(1 + υ)(1− 2υ)D3 =
E
2(1 + υ)(A.5)
53

B. Elemento plano de cuatro nodos con interpolación lineal
Es un elemento finito bidimensional de cuatro nodos que se puede usar para modelarproblemas de tesión plana. Se puede clasificar en dos casos. El primer caso es elregular, donde se considera un rectángulo, cuyos lados son paralelos a los ejes x y y(coordenadas globales), como lo muestra la Figura 27a. El otro caso es el elementoirregular cuadrangular de cuatro nodos, donde sus lados no coinciden paralelamentecon los ejes x y y, como lo muestra Figura 27b. Es uno de los elementos mas sencillos,porque su matriz de rigidez exacta se puede obtener integrando analíticamente. Esteelemento cuenta con una gran aplicación en los campos de la optimización topológica yen mecanismos flexibles.
Figura 27: Elemento Rectangular de 4 Nodos (a) Caso regular, (b) Caso irregular.
(x1,y1) (x2,y2)
(x3,y3)(x4,y4)
x
y
(x1,y1)
(x2,y2)
(x3,y3)
(x4,y4)
x
y
(a) (b)
Fuente: Adaptado de Chavez y Mínguez [7].
Aplicación del método de elementos finitos
El análisis por elementos finitos, aplicado en problemas de elasticidad lineal, son plantea-dos de la siguiente manera:
f eext = Keue, (B.1)
donde f eext y ue son las fuerzas externas y los desplazamientos del elemento, respecti-
vamente. Cuyos valores pueden ser conocido o a determinar, dependiendo del tipo deanálisis. Ke es la matriz de rigidez del elemento, la cual se puede obtener utilizando elprincipio de energía potencial (Formulación variacional)[7] o aplicando el Teorema delTrabajo Virtual [13], que lleva al siguiente resultado:
54
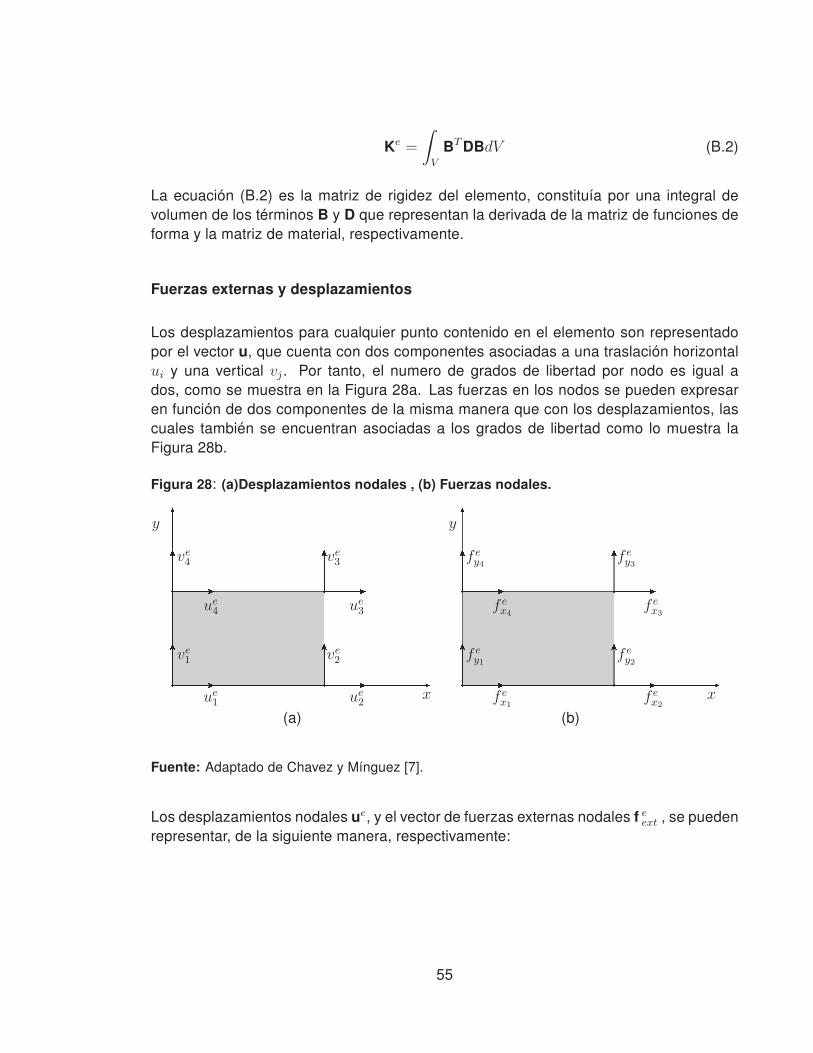
Ke =
∫
V
BTDBdV (B.2)
La ecuación (B.2) es la matriz de rigidez del elemento, constituía por una integral devolumen de los términos B y D que representan la derivada de la matriz de funciones deforma y la matriz de material, respectivamente.
Fuerzas externas y desplazamientos
Los desplazamientos para cualquier punto contenido en el elemento son representadopor el vector u, que cuenta con dos componentes asociadas a una traslación horizontalui y una vertical vj . Por tanto, el numero de grados de libertad por nodo es igual ados, como se muestra en la Figura 28a. Las fuerzas en los nodos se pueden expresaren función de dos componentes de la misma manera que con los desplazamientos, lascuales también se encuentran asociadas a los grados de libertad como lo muestra laFigura 28b.
Figura 28: (a)Desplazamientos nodales , (b) Fuerzas nodales.
ue1
ve1
ue2
ve2
ue3
ve3
ue4
ve4
x
y
f ex1
f ey1
f ex2
f ey2
f ex3
f ey3
f ex4
f ey4
x
y
(a) (b)
Fuente: Adaptado de Chavez y Mínguez [7].
Los desplazamientos nodales ue, y el vector de fuerzas externas nodales f eext , se pueden
representar, de la siguiente manera, respectivamente:
55
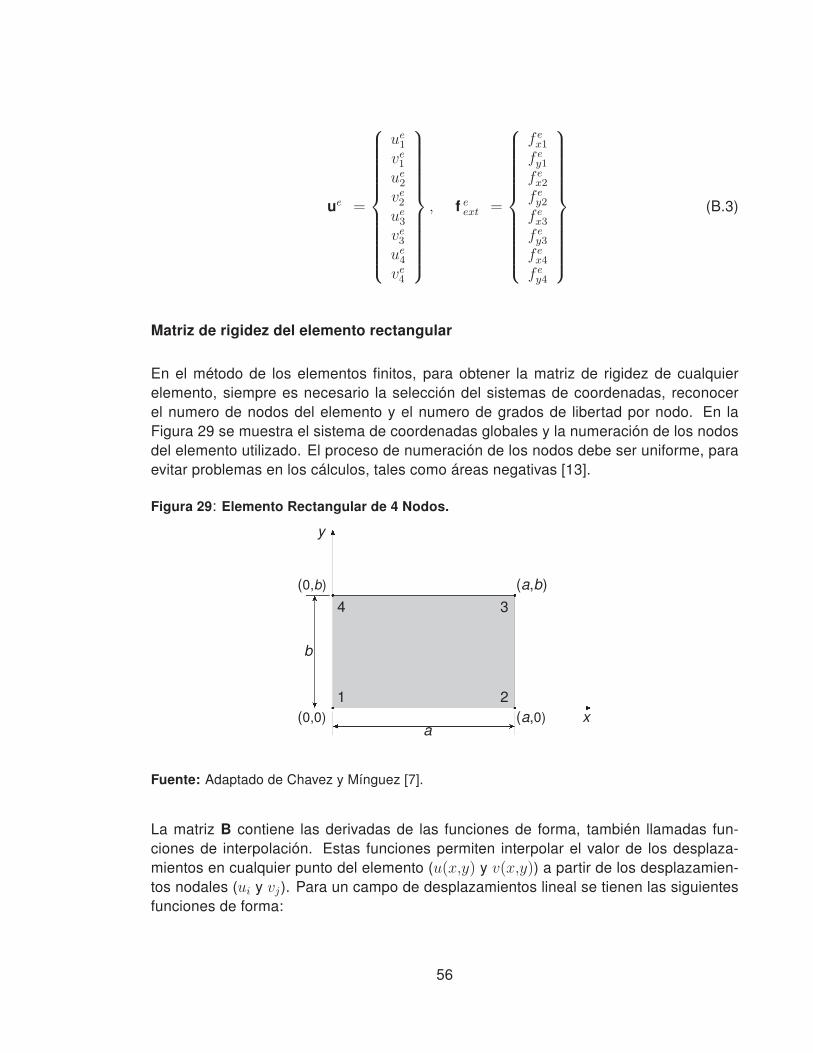
ue =
ue1
ve1ue2
ve2ue3
ve3ue4
ve4
, f eext =
f ex1
f ey1
f ex2
f ey2
f ex3
f ey3
f ex4
f ey4
(B.3)
Matriz de rigidez del elemento rectangular
En el método de los elementos finitos, para obtener la matriz de rigidez de cualquierelemento, siempre es necesario la selección del sistemas de coordenadas, reconocerel numero de nodos del elemento y el numero de grados de libertad por nodo. En laFigura 29 se muestra el sistema de coordenadas globales y la numeración de los nodosdel elemento utilizado. El proceso de numeración de los nodos debe ser uniforme, paraevitar problemas en los cálculos, tales como áreas negativas [13].
Figura 29: Elemento Rectangular de 4 Nodos.
a
b
x
y
(0,0) (a,0)
(a,b)(0,b)
1 2
34
Fuente: Adaptado de Chavez y Mínguez [7].
La matriz B contiene las derivadas de las funciones de forma, también llamadas fun-ciones de interpolación. Estas funciones permiten interpolar el valor de los desplaza-mientos en cualquier punto del elemento (u(x,y) y v(x,y)) a partir de los desplazamien-tos nodales (ui y vj). Para un campo de desplazamientos lineal se tienen las siguientesfunciones de forma:
56

u(x,y) = α1 + α2x+ α3y + α4xyv(x,y) = α5 + α6x+ α7y + α8xy
(B.4)
Los coeficientes α son constantes a determinar y x y y son las variables independientes,que en forma matricial se pueden expresar de la siguiente manera:
u(x,y) =
u(x,y)v(x,y)
= Xα =
[1 x y xy 0 0 0 00 0 0 0 1 x y xy
]
α1
α2
α3
α4
α5
α6
α7
α8
(B.5)
Para determinar los coeficientes α de la ecuación (B.5), se empieza por la sustitución delas coordenadas de los cuatro nodos del elemento, en las ecuaciones (B.5) para obtener:
u(x1,y1) = ue1 = α1 + α2x1 + α3y1 + α4x1y1
v(x1,y1) = ve1 = α5 + α6x1 + α7y1 + α8x1y1u(x2,y2) = ue
2 = α1 + α2x2 + α3y2 + α4x2y2v(x2,y2) = ve2 = α5 + α6x2 + α7y2 + α8x2y2u(x3,y3) = ue
3 = α1 + α2x3 + α3y3 + α4x3y3v(x3,y3) = ve3 = α5 + α6x3 + α7y3 + α8x3y3u(x4,y4) = ue
4 = α1 + α2x4 + α3y4 + α4x4y4v(x4,y4) = ve4 = α5 + α6x4 + α7y4 + α8x4y4
(B.6)
Para resolver las ecuaciones (B.6), se expresaran de forma matricial, quedando de lasiguiente manera:
u(e)1
v(e)1
u(e)2
v(e)2
u(e)3
v(e)3
u(e)4
v(e)4
=
1 x1 y1 x1y1 0 0 0 00 0 0 0 1 x1 y1 x1y11 x2 y2 x2y2 0 0 0 00 0 0 0 1 x2 y2 x2y21 x3 y3 x3y3 0 0 0 00 0 0 0 1 x3 y3 x3y31 x4 y4 x4y4 0 0 0 00 0 0 0 1 x4 y4 x4y4
α1
α2
α3
α4
α5
α6
α7
α8
(B.7)
57

que en forma compacta se puede expresar:
ue = Aα (B.8)
De acuerdo a la Figura 29 , se obtiene:
x1 = 0 y1 = 0x2 = a y2 = 0x3 = a y3 = bx4 = 0 y4 = b
(B.9)
Reemplazado los valores (B.9) en la matriz A de la ecuación (B.7) , se obtiene la sigu-iente expresión:
u(e)1
v(e)1
u(e)2
v(e)2
u(e)3
v(e)3
u(e)4
v(e)4
=
1 0 0 0 0 0 0 00 0 0 0 1 0 0 01 a 0 0 0 0 0 00 0 0 0 1 a 0 01 a b ab 0 0 0 00 0 0 0 1 a b ab1 0 0 0 0 0 0 00 0 0 0 1 0 b 0
α1
α2
α3
α4
α5
α6
α7
α8
(B.10)
Obteniendo la solución, de la siguiente manera:
α = A−1ue (B.11)
Donde A−1 , es:
A−1 =
1 0 0 0 0 0 0 0− 1
a0 1
a0 1 0 0 0
−1b
0 0 0 0 0 1b
01ab
0 − 1ab
0 1ab
0 − 1ab
00 1 0 0 1 a 0 00 − 1
a0 1
a0 0 0 0
0 −1b
0 0 0 0 0 1b
0 1ab
0 − 1ab
0 1ab
0 − 1ab
(B.12)
58

Se puede observar en la ecuación (B.12) , que la matriz solamente queda en términosde a y b, los cuales hacen referencia al ancho y alto, respectivamente. Se procede areemplazar la expresión (B.11) resuelta, en la ecuación (B.8) , quedando de la siguientemanera:
u(x,y) = XA−1︸ ︷︷ ︸
N
ue (B.13)
La ecuación (B.13), se puede expresar como:
u(x,y) = Nue (B.14)
Donde N es la matriz que contiene las funciones de forma o interpolación, la cual nosprovee los desplazamientos en cualquier punto dentro del elemento en función de losdesplazamientos nodales.
N =
[N1 0 N2 0 N3 0 N4 00 N1 0 N2 0 N3 0 N4
]
(B.15)
Donde se obtiene:
N1 =1
ab(ab− bx− ay + xy) N2 =
1
ab(bx− xy)
N3 =xy
abN4 =
1
ab(ay − xy)
(B.16)
Obtenidas las funciones de forma se procede a establecer una relación entre las de-formaciones ε(x,y) y los desplazamientos dentro del elemento, la que se puede definirsegún la teoría de la elasticidad lineal:
ε(x,y) =
εxεyγxy
=
∂u
∂x∂v
∂y∂u
∂y+
∂v
∂x
(B.17)
La ecuación (B.17) es aplicable tanto a problemas de tensión plana como de deformaciónplana. En forma matricial se tiene:
59

εxεyγxy
=
∂
∂x0
0∂
∂y∂
∂y
∂
∂x
uv
(B.18)
Reemplazando el vector desplazamiento dado por la ecuación (B.14), en (B.18), se ob-tiene:
εxεyγxy
=
∂
∂x0
0∂
∂y∂
∂y
∂
∂x
Nue (B.19)
Reemplazando el valor N, se llega a:
εxεyγxy
=
∂
∂x0
0∂
∂y∂
∂y
∂
∂x
[N1 0 N2 0 N3 0 N4 00 N1 0 N2 0 N3 0 N4
]
ue (B.20)
Operando se obtiene:
εxεyγxy
=
∂N1
∂x0
∂N2
∂x0
∂N3
∂x0
∂N4
∂x0
0∂N1
∂y0
∂N2
∂y0
∂N3
∂y0
∂N4
∂y
∂N1
∂y
∂N1
∂x
∂N2
∂y
∂N2
∂x
∂N3
∂y
∂N3
∂x
∂N4
∂y
∂N4
∂x
︸ ︷︷ ︸
B
ue (B.21)
El campo de deformaciones se puede expresar de manera compacta:
ε(x,y) = Bue (B.22)
60

Las derivadas de las funciones de forma son:
∂N1
∂x=
y − b
ab
∂N1
∂y=
x− a
ab(B.23)
∂N2
∂x=
b− y
ab
∂N2
∂y= −
x
ab∂N3
∂x=
y
ab
∂N3
∂y=
x
ab∂N4
∂x= −
y
ab
∂N4
∂y=
a− x
ab
Sustituyendo las derivadas de las funciones de forma se obtiene:
B =1
ab
(y − b) 0 (b− y) 0 y 0 −y 00 (x− a) 0 −x 0 x 0 (a− x)
(x− a) (y − b) −x (b− y) x y (a− x) −y
(B.24)
Para un material isotropico, homogéneo, elástico y lineal la relación tensión-deformación(ley de Hook) esta dada por:
σ(x,y) = Dε(x,y) (B.25)
Donde D es la matriz del material o matriz constitutiva elástica, que tiene dos opcionesdependiendo si se tiene un estado plano de esfuerzo o de deformación (ver anexo A).Reemplazando la ecuación (B.22) en (B.25) se obtiene la relación tension-desplazamiento:
σ(x,y) = DBue, (B.26)
que permite conocer el valor de tension en cualquier punto del elemento una vez cono-cidos los desplazamientos nodales.
Finalmente, para obtener la matriz de rigidez se reemplazan la matriz B (B.24) y la matrizD (A.3) y se integra en todo el volumen del elemento. Como el elemento tiene un espesorconstante (t), se tiene:
Ke = t
∫
A
BTDBdA = t
∫ b
0
∫ a
0
BTDBdxdy, (B.27)
61

finalmente se tiene:
Ke =E
1− υ2
k11 k12 k13 k14 k15 k16 k17 k18
k22 k23 k24 k25 k26 k27 k28
k33 k34 k35 k36 k37 k38
k44 k45 k46 k47 k48
k55 k56 k57 k58
k66 k67 k68
k77 k78
Sim. k88
(B.28)
Donde:
k11 =bD1
3a+
aD3
3bk12 =
D2 +D3
4k13 = −
bD1
3a+
aD3
6bk14 =
D2 −D3
4(B.29)
k15 = −bD1
6a−
aD3
6bk16 = −k12 k17 =
bD1
6a−
aD3
3bk18 = −k14
k22 =aD1
3b+
bD3
3ak23 = −k14 k24 =
aD1
6b−
bD3
3ak25 = −k12
k26 = −aD1
6b−
bD3
6ak27 = −k14 k28 = −
aD1
3b+
bD3
6ak33 = k11
k34 = −k12 k35 = k17 k36 = k14 k37 = k15
k38 = k12 k44 = k22 k45 = −k14 k46 = k28
k47 = k12 k48 = k26 k55 = k11 k56 = k12
k57 = k13 k58 = k14 k66 = k22 k67 = −k14
k68 = k24 k77 = k11 k78 = −k12 k88 = k22
62
C. Código
Código principal
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% UNIVERSIDAD AUTÓNOMA DE OCCIDENTE %% DEPTO. DE ENERGÉTICA Y MECÁNICA %% PROGRAMA DE ING . MECÁNICA %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Programa Opt imizac ión topo lóg i ca% E s c r i t o por Car los A lbe r to Meza% Fecha 17 J u l i o de 2012% emai l car los_mezita@hotmai l . com%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Dominio① = 200;② = 100;
= ① *② ; = 2* (①+1) * ( ②+1) ;
% Propiedades f i s i c a s de l ma te r i a l = 205;♥ = 0 .29 ;
% Parametros de l a op t im izac ion♦- = 0 . 4 ;♣♥ = 3;-♠♥ = 2 . 5 ;♠♦ = 0 .15 ;
% Var iab les de diseño① = ♦♥3 (① , ② ) *♦- ;
% Cargas y r e s t r i c c i o n e s = [ ( ①+1) 0 −1];
f o r ♥=1 : (②+1)- = [ ( ( ( ①+1) *♥ ) +1)−(①+1) 1 1 ] ;-3 (♥ , 1 ) =- ( 1 ,1 ) ;-3 (♥ , 2 ) =- ( 1 ,2 ) ;-3 (♥ , 3 ) =- ( 1 ,3 ) ;
end
3 = [ -3 ] ;
% Conect iv idad♦♥ = ♦♥ (① , ② ) ;
%%%%%%%%%%%%%%% LOOP %%%%%%%%%%%%%%% = 0;♦ = zeros (① , ② ) ;
:- = 150;♦♥: = 1;
f o r :-=1::-
% MEF = = ( , ♥ ) ;
63

❯ = zeros (8 ,1 ) ;♦ = zeros (① , ② ) ;
%t i c❯ = ♠♣.♦❴♠ (① , ② , ♦♥ , , ♥ , , 6 , ① , ♣♥ ) ;
%toc%t i c
f o r =1:
❯ ( 1 ) = ❯ (2 *♦♥ ( , 1 )−1) ;❯ ( 2 ) = ❯ (2 *♦♥ ( , 1 ) ) ;❯ ( 3 ) = ❯ (2 *♦♥ ( , 2 )−1) ;❯ ( 4 ) = ❯ (2 *♦♥ ( , 2 ) ) ;❯ ( 5 ) = ❯ (2 *♦♥ ( , 3 )−1) ;❯ ( 6 ) = ❯ (2 *♦♥ ( , 3 ) ) ;❯ ( 7 ) = ❯ (2 *♦♥ ( , 4 )−1) ;❯ ( 8 ) = ❯ (2 *♦♥ ( , 4 ) ) ;
= + ① ( ) ^♣♥ * ( ❯ ' * *❯ ) ;♦ (;. ) = ;♦ ( ) = ♦ ( ) − ♣♥ *① ( ) ^ (♣♥−1) * ( ❯ ' * *❯ ) ;
end%toc
disp ( 6;.; ( ' I t e r−−> ' , num2str (;. ) , ' / ' , num2str (;. ) , ' | ' , ' Fobj= ' , num2str ( ) , ' | ' , '←lmov= ' , num2str (♠♦ ) ) )
= 0;%t i c
♦ = ;.6♥ (① , ② , ♦ , ① , .♠♥ ) ;%toc%t i c
i f (♦♥; < 25)♦♥; = ♦♥; + 1;
e lse♠♦ = ♠♦ / 2 ;♦♥; = 1;
end
① = ♥♣.♦ (① , ② , ① , ♦ , ♦. , ♠♦ ) ;%toc
subp lo t (2 ,1 ,1 )colormap ( gray ) ; imagesc ( f l i p u d (−① ' ) ) ; ax is = ; ax is ;; ; ax is ♦ ; drawnow ;subp lo t (2 ,1 ,2 )p l o t (♦ ) ; g r i d ; drawnow ;
end
Matriz de rigidez del elemento
f u n c t i o n = = ( , ♥ )
=[ 1/2−♥ /6 1/8+♥ /8 −1/4−♥ /12 −1/8+3*♥ /8 −1/4+♥ /12 −1/8−♥ /8 ♥ /6 1/8−3*♥ / 8 ] ;
= /(1−♥^2) * [ ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 5 ) ( 6 ) ( 7 ) ( 8 ) ( 2 ) ( 1 ) ( 8 ) ( 7 ) ( 6 ) ( 5 ) ( 4 ) ( 3 ) ( 3 ) ( 8 ) ( 1 ) ( 6 ) ( 7 ) ( 4 ) ( 5 ) ( 2 ) ( 4 ) ( 7 ) ( 6 ) ( 1 ) ( 8 ) ( 3 ) ( 2 ) ( 5 ) ( 5 ) ( 6 ) ( 7 ) ( 8 ) ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 6 ) ( 5 ) ( 4 ) ( 3 ) ( 2 ) ( 1 ) ( 8 ) ( 7 ) ( 7 ) ( 4 ) ( 5 ) ( 2 ) ( 3 ) ( 8 ) ( 1 ) ( 6 )
64
( 8 ) ( 3 ) ( 2 ) ( 5 ) ( 4 ) ( 7 ) ( 6 ) ( 1 ) ] ;
Conectividad
f u n c t i o n ♦♥ = ♦♥ (① , ② )
= ① *② ;
)♦♥ = 0;♦♥- = 1;
f o r =1:+②)♦♥ = )♦♥ + 1;
i f )♦♥ <= ①
♦♥ (♦♥- , 1 : 4 ) = [ +1 ( ( ①+1) +(+1) ) ( ( ①+1) +( ) ) ] ;♦♥- = ♦♥- + 1;
e lse)♦♥ = 0;
end
end
Método de elementos finitos
f u n c t i o n [ ❯ ] = ♠♣)♦❴♠ (① , ② , ♦♥ , , ♥ , , 6 , ① , ♣♥ )
= ① *② ; = 2* (①+1) * ( ②+1) ;
= sparse ( , ) ; = ; = : ( , ♥ ) ;
%t i cf o r =1:
(2 *♦♥ ( , 1 )−1,2*♦♥ ( , 1 )−1) = ( 1 ,1 ) ; (2 *♦♥ ( , 1 )−1,2*♦♥ ( , 1 ) ) = ( 1 ,2 ) ; (2 *♦♥ ( , 1 )−1,2*♦♥ ( , 2 )−1) = ( 1 ,3 ) ; (2 *♦♥ ( , 1 )−1,2*♦♥ ( , 2 ) ) = ( 1 ,4 ) ; (2 *♦♥ ( , 1 )−1,2*♦♥ ( , 3 )−1) = ( 1 ,5 ) ; (2 *♦♥ ( , 1 )−1,2*♦♥ ( , 3 ) ) = ( 1 ,6 ) ; (2 *♦♥ ( , 1 )−1,2*♦♥ ( , 4 )−1) = ( 1 ,7 ) ; (2 *♦♥ ( , 1 )−1,2*♦♥ ( , 4 ) ) = ( 1 ,8 ) ;
(2 *♦♥ ( , 1 ) ,2*♦♥ ( , 1 )−1) = ( 2 ,1 ) ; (2 *♦♥ ( , 1 ) ,2*♦♥ ( , 1 ) ) = ( 2 ,2 ) ; (2 *♦♥ ( , 1 ) ,2*♦♥ ( , 2 )−1) = ( 2 ,3 ) ; (2 *♦♥ ( , 1 ) ,2*♦♥ ( , 2 ) ) = ( 2 ,4 ) ; (2 *♦♥ ( , 1 ) ,2*♦♥ ( , 3 )−1) = ( 2 ,5 ) ; (2 *♦♥ ( , 1 ) ,2*♦♥ ( , 3 ) ) = ( 2 ,6 ) ; (2 *♦♥ ( , 1 ) ,2*♦♥ ( , 4 )−1) = ( 2 ,7 ) ;
65
(2 *♦♥ ( , 1 ) ,2*♦♥ ( , 4 ) ) = ( 2 ,8 ) ;
(2 *♦♥ ( , 2 )−1,2*♦♥ ( , 1 )−1) = ( 3 ,1 ) ; (2 *♦♥ ( , 2 )−1,2*♦♥ ( , 1 ) ) = ( 3 ,2 ) ; (2 *♦♥ ( , 2 )−1,2*♦♥ ( , 2 )−1) = ( 3 ,3 ) ; (2 *♦♥ ( , 2 )−1,2*♦♥ ( , 2 ) ) = ( 3 ,4 ) ; (2 *♦♥ ( , 2 )−1,2*♦♥ ( , 3 )−1) = ( 3 ,5 ) ; (2 *♦♥ ( , 2 )−1,2*♦♥ ( , 3 ) ) = ( 3 ,6 ) ; (2 *♦♥ ( , 2 )−1,2*♦♥ ( , 4 )−1) = ( 3 ,7 ) ; (2 *♦♥ ( , 2 )−1,2*♦♥ ( , 4 ) ) = ( 3 ,8 ) ;
(2 *♦♥ ( , 2 ) ,2*♦♥ ( , 1 )−1) = ( 4 ,1 ) ; (2 *♦♥ ( , 2 ) ,2*♦♥ ( , 1 ) ) = ( 4 ,2 ) ; (2 *♦♥ ( , 2 ) ,2*♦♥ ( , 2 )−1) = ( 4 ,3 ) ; (2 *♦♥ ( , 2 ) ,2*♦♥ ( , 2 ) ) = ( 4 ,4 ) ; (2 *♦♥ ( , 2 ) ,2*♦♥ ( , 3 )−1) = ( 4 ,5 ) ; (2 *♦♥ ( , 2 ) ,2*♦♥ ( , 3 ) ) = ( 4 ,6 ) ; (2 *♦♥ ( , 2 ) ,2*♦♥ ( , 4 )−1) = ( 4 ,7 ) ; (2 *♦♥ ( , 2 ) ,2*♦♥ ( , 4 ) ) = ( 4 ,8 ) ;
(2 *♦♥ ( , 3 )−1,2*♦♥ ( , 1 )−1) = ( 5 ,1 ) ; (2 *♦♥ ( , 3 )−1,2*♦♥ ( , 1 ) ) = ( 5 ,2 ) ; (2 *♦♥ ( , 3 )−1,2*♦♥ ( , 2 )−1) = ( 5 ,3 ) ; (2 *♦♥ ( , 3 )−1,2*♦♥ ( , 2 ) ) = ( 5 ,4 ) ; (2 *♦♥ ( , 3 )−1,2*♦♥ ( , 3 )−1) = ( 5 ,5 ) ; (2 *♦♥ ( , 3 )−1,2*♦♥ ( , 3 ) ) = ( 5 ,6 ) ; (2 *♦♥ ( , 3 )−1,2*♦♥ ( , 4 )−1) = ( 5 ,7 ) ; (2 *♦♥ ( , 3 )−1,2*♦♥ ( , 4 ) ) = ( 5 ,8 ) ;
(2 *♦♥ ( , 3 ) ,2*♦♥ ( , 1 )−1) = ( 6 ,1 ) ; (2 *♦♥ ( , 3 ) ,2*♦♥ ( , 1 ) ) = ( 6 ,2 ) ; (2 *♦♥ ( , 3 ) ,2*♦♥ ( , 2 )−1) = ( 6 ,3 ) ; (2 *♦♥ ( , 3 ) ,2*♦♥ ( , 2 ) ) = ( 6 ,4 ) ; (2 *♦♥ ( , 3 ) ,2*♦♥ ( , 3 )−1) = ( 6 ,5 ) ; (2 *♦♥ ( , 3 ) ,2*♦♥ ( , 3 ) ) = ( 6 ,6 ) ; (2 *♦♥ ( , 3 ) ,2*♦♥ ( , 4 )−1) = ( 6 ,7 ) ; (2 *♦♥ ( , 3 ) ,2*♦♥ ( , 4 ) ) = ( 6 ,8 ) ;
(2 *♦♥ ( , 4 )−1,2*♦♥ ( , 1 )−1) = ( 7 ,1 ) ; (2 *♦♥ ( , 4 )−1,2*♦♥ ( , 1 ) ) = ( 7 ,2 ) ; (2 *♦♥ ( , 4 )−1,2*♦♥ ( , 2 )−1) = ( 7 ,3 ) ; (2 *♦♥ ( , 4 )−1,2*♦♥ ( , 2 ) ) = ( 7 ,4 ) ; (2 *♦♥ ( , 4 )−1,2*♦♥ ( , 3 )−1) = ( 7 ,5 ) ; (2 *♦♥ ( , 4 )−1,2*♦♥ ( , 3 ) ) = ( 7 ,6 ) ; (2 *♦♥ ( , 4 )−1,2*♦♥ ( , 4 )−1) = ( 7 ,7 ) ; (2 *♦♥ ( , 4 )−1,2*♦♥ ( , 4 ) ) = ( 7 ,8 ) ;
(2 *♦♥ ( , 4 ) ,2*♦♥ ( , 1 )−1) = ( 8 ,1 ) ; (2 *♦♥ ( , 4 ) ,2*♦♥ ( , 1 ) ) = ( 8 ,2 ) ; (2 *♦♥ ( , 4 ) ,2*♦♥ ( , 2 )−1) = ( 8 ,3 ) ; (2 *♦♥ ( , 4 ) ,2*♦♥ ( , 2 ) ) = ( 8 ,4 ) ; (2 *♦♥ ( , 4 ) ,2*♦♥ ( , 3 )−1) = ( 8 ,5 ) ; (2 *♦♥ ( , 4 ) ,2*♦♥ ( , 3 ) ) = ( 8 ,6 ) ; (2 *♦♥ ( , 4 ) ,2*♦♥ ( , 4 )−1) = ( 8 ,7 ) ; (2 *♦♥ ( , 4 ) ,2*♦♥ ( , 4 ) ) = ( 8 ,8 ) ;
= + *① ( ) ^♣♥ ; = * 0 ;
end%toc%t i c
% Cargas+ = s ize ( ) ; = zeros ( , 1 ) ;
66
f o r =1:" (2 * ( , 1 )−1) = ( , 2 ) ; (2 * ( , 1 ) ) = ( , 3 ) ;
end
% r e s t r i c c i o n e s" = s ize (' ) ;
f o r =1:" ( 1 )
i f ' ( , 2 ) == 1 (2 *' ( , 1 ) −1 ,:) = 0 ; ( : , 2 * ' ( , 1 )−1) = 0 ; (2 *' ( , 1 )−1,2*' ( , 1 )−1) = 1 ;
end
i f ' ( , 3 ) == 1 (2 *' ( , 1 ) , : ) = 0 ; ( : , 2 * ' ( , 1 ) ) = 0 ; (2 *' ( , 1 ) ,2*' ( , 1 ) ) = 1 ;
endend
%toc%t i c
% Solución de l sistema❯ = \ ;
%toc
Filtro (Tomado de Bendsøe y Sigmund 2003 [4])
f u n c t i o n ♥ = #%&♥ (① , ② , , ① , %♠♥ )
♥ = zeros (① , ② ) ;
f o r =1:①f o r =1:②
① = (−0.5) ;② = (−0.5) ;sum = 0 . 0 ;
f o r ♠=1:①f o r ♥=1:②
① = (♠−0.5) ;② = (♥−0.5) ; = %♠♥−s q r t ( ( ①−① ) ^2+(②−② ) ^2) ;sum = sum + max(0 , ) ;
♥ ( , ) = ♥ ( , ) + max(0 , ) *① (♠ , ♥ ) * (♠ , ♥ ) ;end
end♥ ( , ) = ♥ ( , ) / ( ① ( , ) *sum) ;
endend
67

Rutina de PLS
f u n c t i o n ①♦ = ♥♣&♦ (① , ② , ① , , ♦& , ♠ )
= ① *② ;①♠♥ = 0.001;
= reshape (① . * , 1 , ) ;① = reshape (① , 1 , ) ;
f o r (=1: )i f ( (① ( ) +♠ *① ( ) ) > 1 .0 )
( ) = 1 . 0 ;e lse
( ) = (① ( ) +♠ *① ( ) ) ;endi f ( ( ① ( )−♠ *① ( ) ) < ①♠♥ )
( ) = ①♠♥ ;e lse
( ) = (① ( )−♠ *① ( ) ) ;end
end%size ( ub )
♦♣5♦♥6 = ♦♣5♠65 ( ' MaxI ter ' ,150) ;①♦ = ♥♣&♦ ( , ① / , ♦& , [ ] , [ ] , , , [ ] , ♦♣5♦♥6 ) ;
①♦ = reshape (①♦ , ① , ② ) ;
68
![2012 Corregido EXA-Julio - Facultad de Arquitectura ... · [Respuestas en la tabla] Elementos de control Elementos de optimización ... Complete la tabla comparativa entre los siguientes](https://static.fdocuments.ec/doc/165x107/5bd5801209d3f2673e8bd594/2012-corregido-exa-julio-facultad-de-arquitectura-respuestas-en-la-tabla.jpg)