Optimizaci on de Mallas Topol ogicas Activas: una...
8
Optimizaci´ on de Mallas Topol´ ogicas Activas: una aproximaci´ on basada en Scatter Search Nicola Bova 1 , ´ OscarIb´a˜ nez 1 , ´ OscarCord´on 1,2 Resumen — Las mallas topol´ogicas activas son un tipo de modelo deformable, los cuales se usan en visi´ on por computador para llevar a cabo segmen- taci´on de objetos en im´ agenes de muy diferente naturaleza. Si bien el uso de muchos de estos modelos se ha extendido enormemente en los ´ ultimos a˜ nos, ´ este no es el caso de las mallas, que debido a la mayor complejidad del modelo, llevan asociadas un arduo proceso de optimizaci´ on. Adem´ as, la aproxi- maci´on que mejores resultados logra, un algoritmo mem´ etico, emplea un tiempo de c´ alculo tan alto que limita su utilidad. En este art´ ıculo se introduce una aproximaci´ on novedosa para abordar este proceso de optimizaci´on, que emplea el marco de trabajo de scatter search y para el que se han dise˜ nado una serie de componentes con el doble objetivo de mejorar los resultados de segmentaci´ on a la vez que se reducen los tiempos de procesado. Para aprovechar las ventajas del nuevo marco a trav´ es de la inclusi´ on de cono- cimiento del dominio, hemos dise˜ nado e introducido una nueva fase de pre-procesamiento autom´ atico, un operador de combinaci´on de soluciones y una funci´ on de diversidad. La propuesta ha sido probada en cuatro im´ agenes que presentan diferentes dificultades para su segmentaci´ on. Se ha comparado su rendimiento con los dos enfoques existentes, mejor´ andolos signi- ficativamente. Palabras clave — mallas topol´ogicas activas, contor- nos activos, modelos deformables, scatter search, al- goritmos mem´ eticos, algoritmos evolutivos, metaheur´ ısti- cas I. Introducci´ on Los modelos deformables [1] comprenden uno de los campos de investigaci´ on y aplicaci´ on de t´ ecnicas de segmentaci´ on de im´ agenes asistidas por el ordenador de mayor auge. Han demostrado ser efectivos en la segmentaci´ on de im´ agenes digitales mediante la explotaci´ on de caracter´ ısticas de la imagen junto con conocimiento a priori sobre estas estructuras. Desde el trabajo pionero de Kass et al. [2], se han estudiado y propuesto un amplio y diverso conjunto de modelos. ´ Estos se pueden cla- sificar en dos grandes grupos: modelos deformables param´ etricos, que representan curvas y superficies expl´ ıcitamente en sus formas param´ etricas durante la deformaci´ on, y modelos deformables geom´ etricos, que representan curvas y superficies impl´ ıcitamente como un conjunto de niveles de una funci´ on escalar de mayor dimensi´ on. Dentro del primero de estos paradigmas, las Ma- llas Topol´ogicas Activas (MTA) son una implemen- taci´ on discreta de una malla el´ astica con nodos 1 European Centre for Soft Computing, 33600-Mieres, Asturias (Spain). 2 DECSAI and CITIC-UGR. University of Granada, 18071 - Granada (Spain). E-mail: {nicola.bova, oscar.ibanez, oscar.cordon}@softcomputing.es . interrelacionados [3], [4]. Destacan por su capacidad de ajustar los bordes de los objetos al mismo tiempo que detectan su topolog´ ıa interna. Dado que la deformaci´ on del modelo se controla mediante una funci´ on de energ´ ıa de manera que la malla alcanza un m´ ınimo cuando el modelo se sit´ ua sobre el objeto, el proceso de segmentaci´ on se aborda como un problema de optimizaci´ on num´ erica. Hay principalmente dos aproximaciones previas que llevan a cabo la minimizaci´ on de la energ´ ıa en MTAs: una b´ usqueda local del mejor (BLM) [4], y un algoritmo mem´ etico (AM) [5], el cual evita m´ ınimos locales al considerar un marco de b´ usqueda global durante todo el proceso de segmentaci´ on. Aunque los resultados de segmentaci´ on obtenidos por este ´ ultimo m´ etodo son alentadores, su alto coste computacional y su consiguiente elevado tiempo de procesado limitan la aplicabilidad del m´ etodo. Adem´ as, este AM depende de la aplicaci´ on de un conjunto de operaciones de procesado de im´ agenes espec´ ıfico para cada tipo de imagen, lo que conlleva una nueva limitaci´ on de su aplicabilidad en el caso general. Por lo tanto, el objetivo de este trabajo consiste en superar las limitaciones que presentan las aproxi- maciones previas mediante la definici´ on de un nuevo conjunto de componentes integrados en un marco de b´ usqueda global diferente, Scatter Search (SS) [6]. El prop´ osito final se centra en mejorar la calidad de los resultados de la segmentaci´ on a la vez que se reduce el tiempo de procesado. La estructura del art´ ıculo es la siguiente: la Sec- ci´ on II introduce los fundamentos de los modelos deformables, resume las principales caracter´ ısticas de las MTAs y revisa las aproximaciones de opti- mizaci´ on previas aplicadas a modelos deformables y, espec´ ıficamente, a MTAs. La Secci´ on III describe nuestra novedosa propuesta basada en SS. Finalmen- te, la Secci´ on IV muestra los resultados logrados por nuestra aproximaci´ on mientras que la Secci´ on V recoge las conclusiones y trabajo futuro. II. Preliminares Las MTAs [3], [4] integran caracter´ ısticas de seg- mentaci´ on basadas en regi´ on y en bordes. Como se muestra en el ejemplo de la Figura 1, el modelo tiene dos tipos de nodos: internos y externos. Se definen param´ etricamente como v(r, s)=(x(r, s),y(r, s)) donde (r, s) ∈ ([0, 1] × [0, 1]). Las deformaciones de la malla se controlan por la siguiente funci´ on de
Transcript of Optimizaci on de Mallas Topol ogicas Activas: una...

Optimizacion de Mallas Topologicas Activas:una aproximacion basada en Scatter Search
Nicola Bova1, Oscar Ibanez1, Oscar Cordon1,2
Resumen— Las mallas topologicas activas son untipo de modelo deformable, los cuales se usan envision por computador para llevar a cabo segmen-tacion de objetos en imagenes de muy diferentenaturaleza. Si bien el uso de muchos de estos modelosse ha extendido enormemente en los ultimos anos,este no es el caso de las mallas, que debido a lamayor complejidad del modelo, llevan asociadas unarduo proceso de optimizacion. Ademas, la aproxi-macion que mejores resultados logra, un algoritmomemetico, emplea un tiempo de calculo tan alto quelimita su utilidad. En este artıculo se introduce unaaproximacion novedosa para abordar este proceso deoptimizacion, que emplea el marco de trabajo descatter search y para el que se han disenado una seriede componentes con el doble objetivo de mejorar losresultados de segmentacion a la vez que se reducen lostiempos de procesado. Para aprovechar las ventajasdel nuevo marco a traves de la inclusion de cono-cimiento del dominio, hemos disenado e introducidouna nueva fase de pre-procesamiento automatico, unoperador de combinacion de soluciones y una funcionde diversidad. La propuesta ha sido probada en cuatroimagenes que presentan diferentes dificultades parasu segmentacion. Se ha comparado su rendimientocon los dos enfoques existentes, mejorandolos signi-ficativamente.
Palabras clave— mallas topologicas activas, contor-nos activos, modelos deformables, scatter search, al-goritmos memeticos, algoritmos evolutivos, metaheurısti-cas
I. Introduccion
Los modelos deformables [1] comprenden unode los campos de investigacion y aplicacion detecnicas de segmentacion de imagenes asistidas porel ordenador de mayor auge. Han demostrado serefectivos en la segmentacion de imagenes digitalesmediante la explotacion de caracterısticas de laimagen junto con conocimiento a priori sobre estasestructuras. Desde el trabajo pionero de Kass etal. [2], se han estudiado y propuesto un amplio y
diverso conjunto de modelos. Estos se pueden cla-sificar en dos grandes grupos: modelos deformablesparametricos, que representan curvas y superficiesexplıcitamente en sus formas parametricas durantela deformacion, y modelos deformables geometricos,que representan curvas y superficies implıcitamentecomo un conjunto de niveles de una funcion escalarde mayor dimension.
Dentro del primero de estos paradigmas, las Ma-llas Topologicas Activas (MTA) son una implemen-tacion discreta de una malla elastica con nodos
1European Centre for Soft Computing, 33600-Mieres,Asturias (Spain). 2DECSAI and CITIC-UGR. University ofGranada, 18071 - Granada (Spain). E-mail: {nicola.bova,oscar.ibanez, oscar.cordon}@softcomputing.es .
interrelacionados [3], [4]. Destacan por su capacidadde ajustar los bordes de los objetos al mismo tiempoque detectan su topologıa interna. Dado que ladeformacion del modelo se controla mediante unafuncion de energıa de manera que la malla alcanzaun mınimo cuando el modelo se situa sobre el objeto,el proceso de segmentacion se aborda como unproblema de optimizacion numerica.
Hay principalmente dos aproximaciones previasque llevan a cabo la minimizacion de la energıa enMTAs: una busqueda local del mejor (BLM) [4], y unalgoritmo memetico (AM) [5], el cual evita mınimoslocales al considerar un marco de busqueda globaldurante todo el proceso de segmentacion.
Aunque los resultados de segmentacion obtenidospor este ultimo metodo son alentadores, su alto costecomputacional y su consiguiente elevado tiempode procesado limitan la aplicabilidad del metodo.Ademas, este AM depende de la aplicacion de unconjunto de operaciones de procesado de imagenesespecıfico para cada tipo de imagen, lo que conllevauna nueva limitacion de su aplicabilidad en el casogeneral.
Por lo tanto, el objetivo de este trabajo consisteen superar las limitaciones que presentan las aproxi-maciones previas mediante la definicion de un nuevoconjunto de componentes integrados en un marco debusqueda global diferente, Scatter Search (SS) [6]. Elproposito final se centra en mejorar la calidad de losresultados de la segmentacion a la vez que se reduceel tiempo de procesado.
La estructura del artıculo es la siguiente: la Sec-cion II introduce los fundamentos de los modelosdeformables, resume las principales caracterısticasde las MTAs y revisa las aproximaciones de opti-mizacion previas aplicadas a modelos deformablesy, especıficamente, a MTAs. La Seccion III describenuestra novedosa propuesta basada en SS. Finalmen-te, la Seccion IV muestra los resultados logradospor nuestra aproximacion mientras que la SeccionV recoge las conclusiones y trabajo futuro.
II. Preliminares
Las MTAs [3], [4] integran caracterısticas de seg-mentacion basadas en region y en bordes. Como semuestra en el ejemplo de la Figura 1, el modelo tienedos tipos de nodos: internos y externos.
Se definen parametricamente como v(r, s) = (x(r, s), y(r, s))
donde (r, s) ∈ ([0, 1] × [0, 1]). Las deformaciones dela malla se controlan por la siguiente funcion de

Fig. 1: Una MTA de 5x5.
energıa:
E(v(r, s)) =
∫ 1
0
∫ 1
0
Eint(v(r, s)) + Eext(v(r, s))drds
donde Eint y Eext se corresponden con la energıainterna y externa de la MTA, respectivamente.
La energıa interna controla la forma de la malla ydepende de la primera y segunda derivada:
Eint(v(r, s)) =α(|vr(r, s)|2 + |vs(r, s)|2)+β(|vrr(r, s)|2) + |vrs(r, s)|2 + |vss(r, s)|2),
(1)
donde los subındices representan derivadas par-ciales y α y β son coeficientes que controlan lasuavidad de primer y segundo orden de los contornosde la malla. Para calcular la energıa, se discretizael dominio [0, 1] × [0, 1] de los parametros como unarejilla regular, y la primera y segunda derivadas secalculan mediante la tecnica de diferencias finitas.
La energıa externa representa las caracterısticasde la escena que guıa el proceso de ajuste. Se definepor las ecuaciones siguientes:
Eext(v(r, s)) =ωf [I(v(r, s))]+
ρ
|ℵ(r, s)|∑
p∈ℵ(r,s)
1
‖v(r, s)− v(p)‖f [I(v(p))]
f [I(v(r, s))] =
h[I(v(r, s))n] para nodos internos
h[Imax − I(v(r, s))n+ξ(Gmax −G(v(r, s)))]+
δGD(v(r, s)) para nodos externos
(2)
donde ω y ρ son pesos, I(v(r, s)) es el valor deintensidad de la imagen original en la posicionv(r, s), ℵ(r, s) representa la vecindad del nodo (r, s)
y f es una funcion, la cual toma diferentes valoresdependiendo del tipo de nodo a evaluar. Ademas,ξ y δ son terminos de ponderacion, Imax y Gmaxrepresentan el valor maximo de intensidad de laimagen original I y de la de gradientes G, respec-tivamente, I(v(r, s)) y G(v(r, s)) son los valores deintensidad de la imagen original y de gradientes enla posicion del nodo v(r, s), I(v(r, s))n es la intensidadmedia en un rectangulo de n× n y h es una funcionde escalado. La energıa externa tambien incluye untermino de distancia a gradiente [5], GD(v(r, s)), estoes, la distancia Euclıdea desde la posicion v(r, s) alborde mas cercano.
A. Optimizacion de modelos deformables
La mayor parte de los modelos deformables pre-sentes en la literatura se guıan mediante la mini-mizacion de una funcion de energıa E. Esta energıapermite la cuantificacion de la calidad geometricadel modelo (como la suavidad de sus contornoso la similitud con una forma preestablecida) y laprecision de la segmentacion llevada a cabo. Laenergıa suele ser una funcion convexa con muchosmınimos locales. Por lo tanto, los resultados de laoptimizacion dependen en gran medida de la posey forma inicial del modelo. Debido a estas razones,aproximaciones previas basadas en metodos comodiferencias finitas [2], elementos finitos [7], modelosprobabilısticos [8], programacion dinamica [9] y al-goritmos voraces [10] tienen muchas dificultades a lahora de segmentar imagenes con presencia de ruido,las cuales representan la mayor parte de los casosreales.
Dado que el problema de minimizacion formula-do es difıcil de resolver como consecuencia de laimportante presencia de mınimos locales ası comopor el alto numero de variables, en los ultimosanos hay un creciente numero de propuestas queusan metodos estocasticos de optimizacion global.Entre estos, los hay basados en metaheurısticascomo Simulated Annealing [11] pero la mayorıa deestos trabajos se basan en tecnicas de computacionevolutiva como los algoritmos geneticos (AGs). Esteultimo paradigma es el que han usado varios autorespara la minimizacion de la energıa de un snake [12],[13], [14] en diferentes aplicaciones que van desdeel reconocimiento del habla a la imagen medica. Eneste ultimo campo de aplicacion Fan et al. [15] yTohka y Mykkanen [16] utilizaron contornos activoscuya energıa minimizan tambien mediante AGs.Ademas, Ooi y Liatsis [17] utilizaron un algoritmogenetico coevolutivo cooperativo para el trackingde objetos mientras que Tohka [18] hibrido unabusqueda local con un AG, esto es, propuso unAM para la segmentacion de volumenes medianteminimizacion de mallas deformables.
En el caso concreto de la optimizacion de MTAs,el proceso de ajuste consiste en la minimizacion delas funciones de energıa descritas en las Ecuaciones1 y 2. En la propuesta original [4], la malla sesitua sobre toda la imagen y a continuacion seminimiza de manera iterativa la energıa local decada nodo de la malla mediante un algoritmo deBLM. Para solventar las limitaciones que presentaesta propuesta, y en general los metodos de busquedalocales y globales, Ibanez et al. [5] propusieron unAG hibridado con una BLM. Este AM se describea continuacion ya que puede considerarse como elestado del arte en la optimizacion MTA.
B. Propuesta de Ibanez et al.
En este trabajo [5], los autores proponen un AMmediante la hibridacion de un AG y una BLM. Con
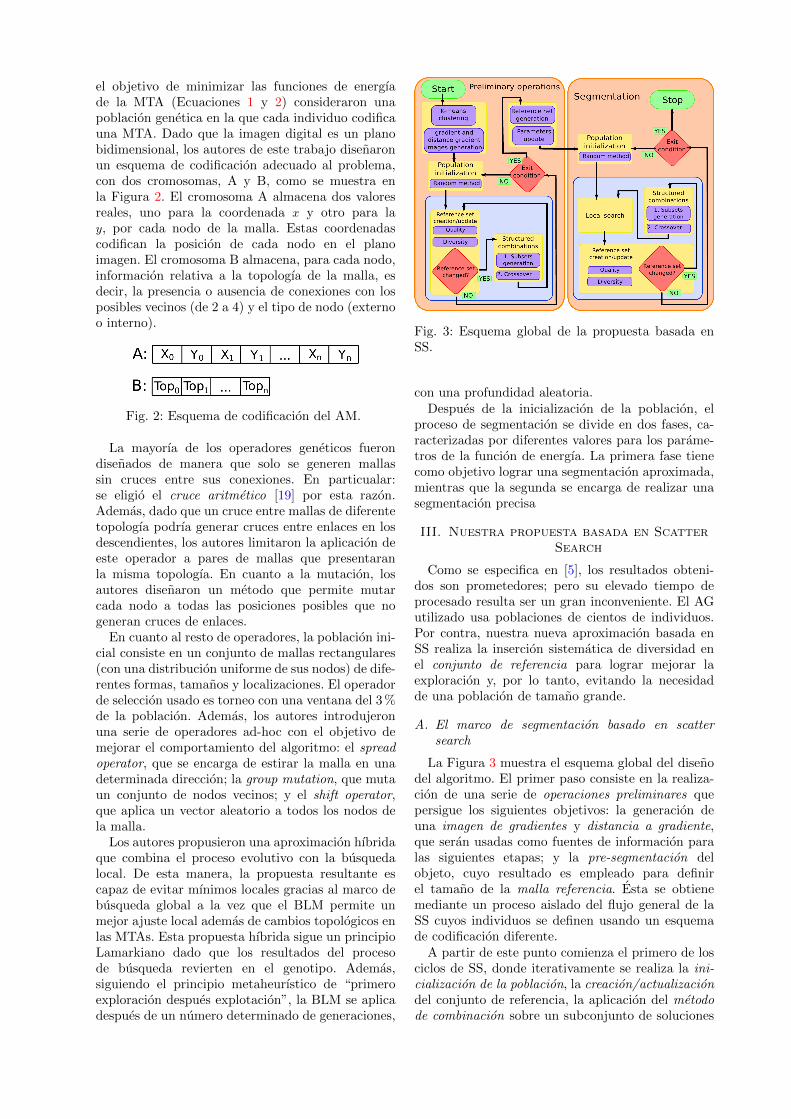
el objetivo de minimizar las funciones de energıade la MTA (Ecuaciones 1 y 2) consideraron unapoblacion genetica en la que cada individuo codificauna MTA. Dado que la imagen digital es un planobidimensional, los autores de este trabajo disenaronun esquema de codificacion adecuado al problema,con dos cromosomas, A y B, como se muestra enla Figura 2. El cromosoma A almacena dos valoresreales, uno para la coordenada x y otro para lay, por cada nodo de la malla. Estas coordenadascodifican la posicion de cada nodo en el planoimagen. El cromosoma B almacena, para cada nodo,informacion relativa a la topologıa de la malla, esdecir, la presencia o ausencia de conexiones con losposibles vecinos (de 2 a 4) y el tipo de nodo (externoo interno).
Fig. 2: Esquema de codificacion del AM.
La mayorıa de los operadores geneticos fuerondisenados de manera que solo se generen mallassin cruces entre sus conexiones. En particualar:se eligio el cruce aritmetico [19] por esta razon.Ademas, dado que un cruce entre mallas de diferentetopologıa podrıa generar cruces entre enlaces en losdescendientes, los autores limitaron la aplicacion deeste operador a pares de mallas que presentaranla misma topologıa. En cuanto a la mutacion, losautores disenaron un metodo que permite mutarcada nodo a todas las posiciones posibles que nogeneran cruces de enlaces.
En cuanto al resto de operadores, la poblacion ini-cial consiste en un conjunto de mallas rectangulares(con una distribucion uniforme de sus nodos) de dife-rentes formas, tamanos y localizaciones. El operadorde seleccion usado es torneo con una ventana del 3 %de la poblacion. Ademas, los autores introdujeronuna serie de operadores ad-hoc con el objetivo demejorar el comportamiento del algoritmo: el spreadoperator, que se encarga de estirar la malla en unadeterminada direccion; la group mutation, que mutaun conjunto de nodos vecinos; y el shift operator,que aplica un vector aleatorio a todos los nodos dela malla.
Los autores propusieron una aproximacion hıbridaque combina el proceso evolutivo con la busquedalocal. De esta manera, la propuesta resultante escapaz de evitar mınimos locales gracias al marco debusqueda global a la vez que el BLM permite unmejor ajuste local ademas de cambios topologicos enlas MTAs. Esta propuesta hıbrida sigue un principioLamarkiano dado que los resultados del procesode busqueda revierten en el genotipo. Ademas,siguiendo el principio metaheurıstico de “primeroexploracion despues explotacion”, la BLM se aplicadespues de un numero determinado de generaciones,
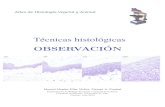
Fig. 3: Esquema global de la propuesta basada enSS.
con una profundidad aleatoria.Despues de la inicializacion de la poblacion, el
proceso de segmentacion se divide en dos fases, ca-racterizadas por diferentes valores para los parame-tros de la funcion de energıa. La primera fase tienecomo objetivo lograr una segmentacion aproximada,mientras que la segunda se encarga de realizar unasegmentacion precisa
III. Nuestra propuesta basada en ScatterSearch
Como se especifica en [5], los resultados obteni-dos son prometedores; pero su elevado tiempo deprocesado resulta ser un gran inconveniente. El AGutilizado usa poblaciones de cientos de individuos.Por contra, nuestra nueva aproximacion basada enSS realiza la insercion sistematica de diversidad enel conjunto de referencia para lograr mejorar laexploracion y, por lo tanto, evitando la necesidadde una poblacion de tamano grande.
A. El marco de segmentacion basado en scattersearch
La Figura 3 muestra el esquema global del disenodel algoritmo. El primer paso consiste en la realiza-cion de una serie de operaciones preliminares quepersigue los siguientes objetivos: la generacion deuna imagen de gradientes y distancia a gradiente,que seran usadas como fuentes de informacion paralas siguientes etapas; y la pre-segmentacion delobjeto, cuyo resultado es empleado para definirel tamano de la malla referencia. Esta se obtienemediante un proceso aislado del flujo general de laSS cuyos individuos se definen usando un esquemade codificacion diferente.
A partir de este punto comienza el primero de losciclos de SS, donde iterativamente se realiza la ini-cializacion de la poblacion, la creacion/actualizaciondel conjunto de referencia, la aplicacion del metodode combinacion sobre un subconjunto de soluciones

(a) (b) (c)
Fig. 4: (a) Imagen original; (f) imagen de distancia agradiente obtenida a partir de la deteccion de bordessobre la imagen original; (g) imagen de distancia agradiente obtenida a partir de la deteccion de bordessobre la imagen original clusterizada.
previamente seleccionadas, a las que posteriormentese les aplica la busqueda local (BLM). Llegados aeste punto, se seleccionan las mejores soluciones quepasan a formar parte del conjunto de referencia re-emplazando a las peores y se repiten los tres ultimospasos hasta alcanzar un numero determinado deiteraciones sin mejoras significativas (NL1 y NL2
para la fase de pre-segmentacion y segmentacion,respectivamente) o en el momento que el conjuntode referencia no cambia. En el primero de los casos,se entiende que hay una mejora significativa cuandose cumple: ∣∣∣∣flsi − fnflsi
∣∣∣∣ > SI
donde flsi es el valor de fitness de la mejor malla enel momento de la ultima mejora significativa, fn esel valor de fitness de la mejor malla del ciclo actualy SI es una constante que toma valores en (0, 1). Sila causa de parada es la segunda, se vuelve a generaruna poblacion inicial para de esa manera introducirdiversidad en el conjunto de referencia.
A.1 Operaciones preliminares
Como se mostro en la Seccion II, la evolucion delas MTAs hacia el objeto a segmentar esta dirigidapor el termino de energıa externa. Esta se calculaen base a las imagenes de gradiente y distanciaa gradiente, cuya calidad es, por lo tanto, crıtica.Sin una energıa externa adecuada, el algoritmo deoptimizacion esta sentenciado a caer en mınimoslocales que conllevan a segmentaciones incorrectas.
La solucion seguida en [5] para la obtencion deestas imagenes consiste en aplicar un conjunto deoperaciones de procesado de imagenes especıficopara tipo. De hecho estas operaciones necesitan deun ajuste manual para lograr una buena imagende gradientes. Con el objetivo de automatizar com-pletamente el proceso de segmentacion, proponemosobtener esta imagen mediante el cluster de pıxelesusando el algoritmo k-means [20].
A.1.a Clustering de la imagen mediante k-means.En nuestro caso, cada pixel de la imagen se asignaa un cluster mediante k-means. Este agrupamientose hace en base al nivel de gris de cada pixel. Los
resultados de este algoritmo dependen fuertementedel parametro K, el cual indica el numero de clusters.Tras un estudio experimental preliminar, se alcanza-ron los mejores resultados con valores de K = 2, paraimagenes sinteticas, y de K = 3, para las imagenesmedicas de las que disponemos. Tras la formacion delos clusters, se escoge como objeto aquel que tengauna localizacion espacial mas compacta. Posterior-mente, si aplicamos un detector de bordes sobreesta imagen, se obtiene la imagen de gradientes.Esta imagen contiene mucho menos ruido que lasque se obtienen si aplicamos un detector de bordesdirectamente sobre la imagen original. Finalmente,se calcula la imagen de distancia gradiente a partirde la imagen anterior, que en el caso de contenerruido, sera de mucha peor calidad, dificultandoenormemente el proceso de segmentacion (ver Figura4).
A.1.b Pre-segmentacion. La fase de pre-segmentacion,la cual se realiza mediante una instancia separada deSS sin busqueda local, tiene como objetivo obteneruna malla rectangular, con un tamano y localizacionsimilares al objeto a segmentar. Para ello, se ha ele-gido una codificacion simplificada I = {x1, y1, w, h},en donde cada individuo I codifica las coordenadas xe y del nodo de la esquina superior izquierda (x1, y1)y el ancho y alto de la malla (w, h). La funcionde energıa se caracteriza por la ausencia de energıainterna mientras que la energıa externa se modificade la siguiente forma:
f [I(v(r, s))] =
h[−Imax + I(v(r, s))] para nodos internos
h[be · (Imax − I(v(r, s)))+ξ(Gmax −G(v(r, s)))]+
δGD(v(r, s)) para nodos externos
donde be es un factor de boosting de nodosexternos y el resto de los terminos son los mismosya introducidos en la Ecuacion 2. Notese que si losnodos internos se situan sobre el objeto a segmentar,el termino h[−Imax+ I(v(r, s))] pasa a ser negativo y,por lo tanto, actua como un termino de refuerzo. Elfactor de boosting de nodos externos se calcula de lasiguiente forma:
be = 5 · |nodos internos||nodos externos|
de manera que un nodo externo que este malsituado tiene mucho mas peso que un nodo internomal situado. Lo que se persigue con esta nuevafuncion de energıa es situar a la malla sobre elobjeto (mediante el termino de refuerzo de los nodosinternos) con los nodos externos fuera del mismo(favorecido por el factor de boosting) pero lo mascerca posible a los contornos del objeto (mediante eltermino de distancia a gradiente).
Finalmente, la malla obtenida se usara como mallade referencia para la siguiente fase de segmentacion.

Fig. 5: (Izquierda) Un nodo mal situado. (Centro)Tras situar al mismo nodo en la posicion media desus vecinos. (Derecha) Su posicion final tras aplicarla BLM.
En concreto, su tamano de celda se usara como unnuevo termino en la funcion de energıa interna. Estenuevo termino, cuya magnitud es proporcional alratio de las areas de la celda de la malla de referenciay la de la malla cuyo fitness se esta calculando,reemplaza a la primera derivada (parte multiplicadapor el termino α).
A.2 Inicializacion de la poblacion
La poblacion inicial consta de mallas localizadasen una posicion aleatoria de la imagen. Para ello, segenera una posicion aleatoria (xs, ys) para el nodosuperior izquierda de cada malla, de manera que xs ∈[0, 0,9 · w] e ys ∈ [0, 0,9 · h], para una imagen con unadimension en pıxeles de w × h. A continuacion, segenera una posicion aleatoria (xe, ye) para el nodoinferior derecha, de manera que xe ∈ [xs + 2 · n,w]e ye ∈ [ys + 2 · m,h], donde n × m es el numero denodos de la malla. La posicion del resto de nodos secalcula de manera uniforme a partir de la posicionde los dos nodos anteriores (xs, ys) y (xe, ye).
A.3 Busqueda local
La busqueda local utilizada en [5] conlleva abuenos resultados cuando se hibrida con la busquedaglobal (AG). Por lo tanto, la busqueda local utilizadaen nuestra propuesta basada en SS sera la misma,BLM. En nuestro caso se aplica con una profundidadaleatoria de 5 a 50 pasos en los dos siguientes casos:
a cada malla generada en la inicializacion de lapoblacion;
a cada descendiente cuyo fitness sea mejor que elde uno de sus progenitores o mejor que la medianadel fitness de los individuos del RefSet1.
Ademas, hemos anadido una nueva heurıstica alalgoritmo de manera que pueda “reparar” aquellosnodos externos mal situados y lejos de sus vecinos(ver Figura 5 para una explicacion grafica).
A.4 Funcion de diversidad
Dada las caracterısticas de este problema, la dis-tancia genotıpica esta fuertemente influenciada porla posicion de las mallas en la imagen. Es por elloque solo se utiliza en la fase de pre-segmentacion. Sedefine de la siguiente manera:
dg(m1,m2) =
n∑i=1
√(m1,i,x −m2,i,x)2 + (m1,i,y −m2,i,y)2,
donde m1 y m2 son dos mallas, n es el numero denodos de la malla y ma,i,k es el componente k = {x, y}del i-esimo nodo de la malla a. Cuanto mas lejos seencuentre una malla de otra, mayor sera el valor dedg.
Por otro lado, durante la fase de segmentacion,es preferible medir la diversidad en base a la formade las mallas. Para ello, hemos desarrollado unadistancia fenotıpica que se describe a continuacion:
dp(m1,m2) =
n∑i=1
((m1,i,x −m2,i,x + µ1,x − µ2,x)
2+
(m1,i,y −m2,i,y + µ1,y − µ2,y)2
) 12
,
donde µa,k es el valor medio de la componente k
para todos los nodos de la malla a. En otras palabras,se calcula la suma de las diferencias de las posicionesde cada nodo, una vez se traslada una mallas a unaposicion en donde al centroide de ambas coincide.
A.5 Metodo de combinacion de soluciones
El metodo de combinacion de soluciones utilizadoen [5], el cruce aritmetico, funciona adecuadamenteen la fase de pre-segmentacion. Sin embargo, en lafase segmentacion, los descendientes que producesuelen tener un fitness peor que el de sus pro-genitores. Esto sucede porque nuca se hereda lainformacion de los genes de los progenitores, sino quese calculan nuevos valores a partir de esta, es decir,se calcula una nueva posicion para todos los nodosde la malla resultante. Para solventar esta impor-tante desventaja proponemos un nuevo metodo decombinacion de soluciones que hemos denominadocruce de propagacion. Su funcionamiento se describea continuacion:
En primer lugar, si las mallas (progenitores) tienendiferente topologıa, la malla resultante (descendien-te) hereda la topologıa de una de ellas escogidaaleatoriamente. Al contrario de lo que sucede en elcruce aritmetico, en el metodo propuesto se calculaun α diferente para cada nodo. Inicialmente, elvalor de α de cada nodo externo se calcula dela siguiente manera, α1,i = e2,i/(e1,i + e2,i), dondeα1,i es el α del nodo i del progenitor 1 y, e1,i ye2,i son las energıas locales de los nodos i de losprogenitores 1 y 2, respectivamente. En el casodel progenitor 2 los valores de α son igual a 1 −α1,i. Posteriormente, se realiza un “boost” de lospesos del cruce (αi) mediante la funcion fcw (verEcuacion 3) para incrementar los valores altos deα y disminuir los bajos. El motivo es manteneren el descendiente los nodos bien situados (sobrebordes) de los progenitores. Ademas, para evitarcruces de enlaces, se suaviza el valor de estos pesos:moff,i = αµ,im1,i+(1−αµ,i)m2,i, donde αµ,i = αb,ℵE(i)
se corresponde con la media de los αi de los vecinos(solo nodos externos) ℵE(i) del nodo i, incluyendo alpropio nodo.

(a) P1 (42474) (b) Offs. (31781) (c) P2 (69772)
Fig. 6: Ejemplo grafico de funcionamiento deloperador de cruce de propagacion. Las figurasde la primera y ultima columna son las mallasprogenitoras, mientras que la columna del mediomuestra la malla descendiente. Entre parentesis semuestra el fitness de cada malla.
αb,i = fcw(αi) =1
2sin
(παi −
π
2
)+
1
2(3)
En cuanto a los nodos internos, el objetivo esque estos tengan una localizacion en base a losnodos externos. Para ello, se realiza un proceso deinterpolacion doble sobre las coordenadas x e y demanera separada. En concreto, los pesos de las coor-denadas x se obtienen interpolando las posicionesde los nodos externos superiores e inferiores, y lospesos de las coordenadas y se obtienen interpolandolas posiciones de los nodos externos laterales, a laizquierda y derecha.
Un ejemplo de la aplicacion de este nuevo metodode combinacion de soluciones se muestra en laFigura 6. Notese como la malla resultante mantienecasi inalteradas las posiciones de los nodos biensituados en las mallas progenitoras y, por lo tanto,el fitness del nuevo individuo mejora al de sus dosprogenitores.
IV. Resultados
Con la idea de evaluar el comportamiento denuestra propuesta, en esta seccion se lleva a ca-bo una comparativa con los metodos previos deoptimizacion de MTAs, la BLM y AM. Por unlado, como parte de un estudio preliminar, estacomparativa se hara de manera subjetiva, conside-rando los siguientes criterios: sensibilidad al ruido,sensibilidad a los parametros del algoritmo y dela funcion de energıa, precision, es decir, calidaddel ajuste a bordes y partes internas del objeto,robustez, relativa a la variabilidad en los resultadosentre ejecuciones distintas y, finalmente, tiempo deejecucion (en segundos). Por otro lado, el conjuntode imagenes de prueba considerado se ha limitado atres imagenes sinteticas y una real (medica) debidolas limitaciones de espacio. Se han obviado imagenescuya segmentacion es facil, y que por lo tanto, todoslos metodos segmentan adecuadamente.
En cuanto a los parametros utilizados para la eje-cucion de cada metodo, se utilizo el mismo conjuntode parametros considerado en [5] para el AM, laBLM no depende de ningun parametro, mientrasque los parametros de la SS se obtuvieron experi-
mentalmente. Este ultimo conjunto de parametrosse muestra a continuacion:
Numero de generaciones = hasta convergenciaCondicion de parada (1a fase) : SI = 0,06, NL1 = 10Stop condition (2a fase) : SI = 0,06, NL2 = 20Tamano de la poblacion = 40RefSet de calidad (b1) = 5RefSet de diversidad (b2) = 5
Todos las pruebas se realizaron en un Intel R©CoreTM2Quad CPU Q9300 de 2.50GHz con 4 GB de RAM.Las segmentaciones resultantes sobre las cuatro image-nes de nuestro conjunto de pruebas pueden verse enla Figura 7.
Si nos fijamos en la precision de las segmentacionespor parte de los tres metodos, podemos observarcomo la BLM nunca obtiene resultados satisfacto-rios. Esto no quiere decir que este metodo no seautil, si no que las imagenes escogidas poseen todasaltos niveles de ruido que dificultan enormementela segmentacion mediante MTAs cuando estas seguıan por una busqueda local. En el caso del AM,se alcanzan resultados casi perfectos tanto en laprimera como en la cuarta imagen. Sin embargo, noes capaz de segmentar adecuadamente las otras dosimagenes, aunque la malla final esta mas cerca delobjeto que en el caso de la BLM, la segmentacionresultante esta muy lejos de ser precisa. Por ultimo,la SS logra segmentar precisamente el interior y losbordes de todas las imagenes salvo la cuarta. En estaultima imagen logra una segmentacion con algunaimprecision en los bordes. Sin embargo, notese quese trata de una imagen de gran dificultad, con unosbordes muy difusos, muy difıciles de determinarincluso por el ojo humano.
En cuanto a la sensibilidad al ruido, las imagenesde nuestro conjunto de pruebas (ver Figura 7)presentan lo que podemos denominar como cuatrotipos de ruido: puntual, gaussiano, sal y pimienta, yruido natural, que se corresponden con la primera,segunda, tercera y cuarta imagen, respectivamente.Como ya se comento anteriormente, la BLM esmuy sensible al ruido (independientemente de sunaturaleza) y no es capaz de segmentar ningunade las imagenes. El AM, en cambio, es capaz desegmentar adecuadamente en condiciones de ruidopuntual y de sal y pimienta, mientras que el ruidogaussiano y el natural parecen afectarle mas. Apesar de ser una propuesta basada en una busque-da global, esta no es capaz de llevar a cabo loscambios topologicos necesarios para adaptarse a lasformas de los objetos a segmentar y la busquedalocal que hibrida es incapaz de realizar las mejorasnecesarias por la presencia de ruido. Por el contrario,la propuesta basada en SS, a pesar de que utilizala misma busqueda local, es capaz de segmentarcorrectamente imagenes con diferentes tipos de ruidogracias a los mecanismos de inyeccion de diversidaden la poblacion de soluciones y al mejor diseno deloperador de combinacion.

Fig. 7: De arriba abajo, resultados de la segmentacion usando la BLM, el AM y la SS.
Otro aspecto a evaluar es la sensibilidad al cam-bio de parametros tanto de la funcion de energıacomo los relativos al algoritmo especıfico. Ante laimposibiidad de implementar una rejilla completacon todas las combinaciones posibles de parametros,nuestra evaluacion se basa en apreciaciones subje-tivas, resultado de multiples ejecuciones de los tresmetodos sobre diferentes imagenes y combinacionesde parametros. La BLM, si bien es un algoritmo noparametrico, es fuertemente dependiente del valorque tomen los parametros de la funcion de energıa,haciendo inviable un uso automatico del metodo.Por el contrario, tanto el AM como la SS, aunquetambien se ven afectados por los cambios en losparametros de la funcion de energıa, presentan unasensibilidad mucho menor. Ademas, a pesar de quetanto el AM como la SS son algoritmos que dependende un numero importante de parametros, una vezajustados (conjunto de parametros al principio deesta seccion), ambos metodos se comportan bienpara muy diversos tipos de imagen.
A la hora de evaluar la robustez de cada uno de losmetodos estudiados, dejamos fuera de este estudioa la BLM por ser un metodo determinıstico. Para
los otros dos metodos, se realizaron diez ejecucionessobre cada una de las imagenes estudiadas (verFigura 7). A falta de una metrica objetiva y debido alas limitaciones de espacio, resumiremos brevementelas conclusiones del analisis visual de estos resulta-dos. En primer lugar, es de destacar la dependenciade la dificultad de la imagen a segmentar, ambosmetodos se comportan de manera robusta con lasimagenes mas sencillas (las tres primeras), pero nocon imagenes mas complejas (cuarta imagen). Sinembargo, la propuesta basada en SS presenta unosresultados mucho mas homogeneos que el AM, quecomo ya hemos visto, es ademas incapaz de segmen-tar adecuadamente dos de las cuatro imagenes.
Finalmente, en la Tabla I se muestran los tiemposde ejecucion empleados por cada metodo. Si bienla BLM emplea mucho menos tiempo incluso quenuestra propuesta basada en SS, no es capaz desegmentar ninguna de las 4 imagenes (ver Figura 7).Uno de los objetivos principales de este trabajo erareducir el tiempo que el AM emplea para realizar unasegmentacion. La propuesta basada en SS mejora envarios ordenes de magnitud esos tiempos, llegandoen algunos casos a reducir en 40 veces el tiempo

Metodo/Imagen 1 2 3 4BLM 0.344 0.188 0.059 0.133AM 33.5 342.4 68.8 39.1SS 19.4 8.3 20.0 18.7
TABLA I: Tiempo de ejecucion (en segundos).
empleado por el AM. Ademas, como hemos vistaanteriormente, nuestra propuesta es la unica capazde segmentar adecuadamente todas las imagenesvistas.
V. Conclusiones y trabajo futuro
En este trabajo hemos introducido una propuestanovedosa para la optimizacion de MTAs basada enel marco evolutivo de la SS, para el que hemosdisenado una serie de componentes encaminados areducir el tiempo de procesado y mejorar la precisionde los resultados de las propuestas existentes: i) unmetodo para obtener imagenes precisas de gradientesy distancia a gradiente de manera completamenteautomatica; ii) una fase de pre-segmentacion, desa-rrollada como un proceso separado de SS, con el ob-jetivo de obtener una aproximacion del tamano delobjeto a segmentar; iii) un nuevo operador de crucecomo metodo de combinacion de soluciones capaz decombinar partes bien situadas de diferentes mallas;iv) dos medidas de diversidad, dependiendo de la fase(segmentacion y pre-segmentacion), para formar unconjunto de referencia lo mas diverso posible; v) unaheurıstica que mejora el comportamiento de la BLM.
Los resultados alcanzados son prometedores. Nues-tra propuesta logra resultados mas precisos quelos metodos anteriores para todas las imagenesusadas. Tambien mejora a las otras propuestas enlos criterios de robustez, sensibilidad a parametros yruido de la imagen. Ademas, el tiempo de procesadoque emplea es hasta 40 veces menor que el empleadopor el AM.
Sin embargo, a pesar del buen comportamiento,nuestro metodo todavıa tiene margen de mejora.En algunos casos las segmentaciones resultantesnecesitan de una mayor precision y el tiempo decomputacion que emplea todavıa es elevado. Algunasideas para lograr dichas mejoras son, la mejorade la inicializacion de la poblacion mediante unamemoria de frecuencia [6], y el desarrollo de unoperador de cruce multi-padre. Ademas, planeamoshacer un extenso analisis experimental cuantitativomediante el uso de diversas metricas sobre una basede imagenes con ground truth.
Agradecimientos
Este trabajo esta soportado por la Comision Eu-ropea bajo el contrato No. 238819 (MIBISOC MarieCurie ITN) y por el Ministerio de Educacion yCiencia (ref. TIN2009-07727).
Referencias
[1] T. McInerney and D. Terzopoulos, “Deformable modelsin medical image analysis: a survey.,” Medical imageanalysis, vol. 1, no. 2, pp. 91–108, 1996.
[2] M. Kass, A. Witkin, and D. Terzopoulos, “Snakes: Activecontour models,” International Journal of ComputerVision, vol. 1, no. 4, pp. 321–331, 1987.
[3] M. Bro-Nielsen, “Active nets and cubes,” IMM TechnicalReport, 1994.
[4] F. M. Ansia, M. Penedo, C. Marino, and A. Mosquera,“A new approach to active nets,” Pattern RecognitionImage Analysis 2, pp. 76–77, 1999.
[5] O. Ibanez, N. Barreira, J. Santos, and M. G.Penedo, “Genetic approaches for topological active netsoptimization,” Pattern Recognition, vol. 42, no. 5, pp.907–917, 2009.
[6] M. Laguna and R. Marti, Scatter Search: Methodologyand Implementations in C, Kluwer Academic Publishers,Norwell, MA, USA, 2002.
[7] L. D. Cohen and I. Cohen, “Finite-element methodsfor active contour models and balloons for 2-D and 3-D images,” IEEE Transactions on Pattern Analysisand Machine Intelligence, vol. 15, no. 11, pp. 1131–1147,1993.
[8] Tonnesen D. Szeliski, R. and D. Terzopoulos, “Modelingsurfaces of arbitrary topology with dynamic particles,”in Proceedings of Conference in Computer Vision andPattern Recognition (CVPR-93), New York, NY, 1993.
[9] A. Amini, T. Weymouth, and R. Jain, “Using dynamicprogramming for solving variational problems in vision,”IEEE Transactions on Pattern Analysis and MachineIntelligence, vol. 12, pp. 855–867, 1990.
[10] D. J. Williams and M. Shah, “A fast algorithm foractive contours and curvature estimation,” Cvgip: ImageUnderstanding, 1992.
[11] G. Storvik, “A bayesian approach to dynamic contoursthrough stochastic sampling and simulated annealing,”IEEE Transactions on Pattern Analysis and MachineIntelligence, vol. 16, pp. 976–986, 1994.
[12] L. Ballerini, “Genetic snakes: Active contour modelsby genetic algorithms,” in Genetic and EvolutionaryComputation in Image Processing and Computer Vision,Lutton E. Olague G. Cagnoni, S., Ed., pp. 177–194.EURASIP Book Series on SP and C, 2007.
[13] Covavisaruch N. Tanatipanond, T., “An improvementof multiscale approach to deformable contour forbrain MR images by genetic algorithm,” in The1999 International Symposium on Intelligent SignalProcessing and Communication System, 1999b, pp. 677–680.
[14] R. Seguier and N. Cladel, “Genetic snakes: Applicationon lipreading,” in International Conference on ArtificialNeural Networks and Genetic Algorithms, 2003.
[15] Y. Fan, T. Jiang, and D. J. Evans, “Volumetricsegmentation of brain images using parallel geneticalgorithms,” IEEE Transactions on Medical Imaging,vol. 21, pp. 904–909, 2002.
[16] Mykkanen J. Tohka, J., “Deformable mesh forautomated surface extraction from noisy images,”International Journal of Image Graphics 4, vol. 3, pp.405–432, 2004.
[17] Liatsis P. Ooi, C., “Co-evolutionary-based active contourmodels in tracking of moving obstacles,” in InternationalConference on Advanced Driver Assistance Systems,2001, pp. 58–62.
[18] J. Tohka, “Global optimization of deformable surfacemeshes based on genetic algorithms,” in InternationalConference on Image Analysis and Processing - ICIAP,2001, pp. 459–464.
[19] F. Herrera, M. Lozano, and A. M. Sanchez, “A taxonomyfor the crossover operator for real-coded geneticalgorithms: An experimental study,” InternationalJournal of Intelligent Systems, vol. 18, pp. 309–338,2003.
[20] T. H. Lee, M. F. A. Fauzi, and R. Komiya,“Segmentation of CT brain images using K-meansand EM clustering,” in Proceedings of the 2008Fifth International Conference on Computer Graphics,Imaging and Visualisation, Washington, DC, USA, 2008,pp. 339–344, IEEE Computer Society.