Скачать ГОСТ 26058-85 Роботы промышленные....
19
Цен* 10 коп. *Уу - ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР. РОБОТЫ ПРОМЫШЛЕННЫЕ ГИДРОДВИГАТЕЛИ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ ТИПЫ, ОСНОВНЫЕ ПАРАМЕТРЫ И ПРИСОЕДИНИТЕЛЬНЫЕ РАЗМЕРЫ ГОСТ 26058—85 Издание официальное ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ М о с к • а сертификация в области пожарной безопасности
Transcript of Скачать ГОСТ 26058-85 Роботы промышленные....

Цен
* 10
коп
.
*У у-
Г О С У Д А Р С Т В Е Н Н Ы Й С Т А Н Д А Р Т С О Ю З А С С Р .
РОБОТЫ ПРОМЫШЛЕННЫЕ
ГИДРОДВИГАТЕЛИ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
ТИПЫ, ОСНОВНЫЕ ПАРАМЕТРЫ И ПРИСОЕДИНИТЕЛЬНЫЕ РАЗМЕРЫ
ГОСТ 26058—85
Издание официальное
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ М о с к • а
сертификация в области пожарной безопасности

РАЗРАБОТАНМинистерством станкостроительной и инструментальной промышленности Министерством высшего и среднего специального образования РСФСР
ИСПОЛНИТЕЛИ
В. П. Саенко; Б. И. Дьячков; Т. М. Бабкова; А. Г. Осколков; А. И. Гольдшмидт; В. Я. Скрицкмй: О. Б. Корытко, камд. теки, иаук; А. С. Донской, квнд. техи. наук; Ю. Я. пашииков, канд. техм. наук; Е. И. Юревич д-р техи. наук
ВНЕСЕНМинистерством станкостроительной и инструментальной промышленности
Зам. министре Н. А. Паничев
А. А. Тульчмиский; Владимиров, С. Н. Кол-
УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стан- дартам от 3 июня 198S г. № 1562

УДК 007J2:4J.011.54:006.354
Г О С У Д А Р С Т В Е Н Н Ы Й С Т А Н Д А Р Т
Группа М7
С С РС О Ю З А
Роботы промышленныеГИДРОДВИГАТЕЛИ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
Тнпы, осноаные параметры и присоединительные размерыIndustrial robots. Hydraulic motors of- actuating mechanisms.
Types, basic parameters and mounting dimensions
ГОСТ26058-85
ВзаменГОСТ 2MS8—13
ОКП 41 4313, 41 4317, 41 4635. 41 4282
Постановлением Государственного комитета СССР по стандартам от 3 нюна 1415 г. Нв 1502 срок вводами! установлен
с 01.ei.8A
длв типа ГДЛс 01.01.88
Несоблюдение стандарта пресладуетса по закону
Настоящий стандарт распространяется на гидроцилиндры, линейные электрогидравлнческие шаговые приводы, поворотные гидродвигатели, электрогидравлнческие шаговые приводы (гидроусилители крутящих моментов с шаговым двигателем), предназначенные для объемных гидроприводов исполнительных устройств промышленных роботов и других \<ашин, работающих на минеральных маслах с кинематической вязкостью от 12 до 400 мм*/с и температурой от 0 до 60 "С класса чистоты не грубее 13-го по ГОСТ 17216—71.
Стандарт не распространяется на специальные типы гидродвнгателей, используемых в промышленных роботах и других машинах.
1. ТИПЫ И ИСПОЛНЕНИЯ
1.1. Гидроцилиндры типа ЦРГ должны изготовлять в следующих исполнениях:
по виду крепления корпуса1 — при помощи хомута,2 — на цапфах.3 — на проушине;
по ныичию торможения поршня1 — без торможения,2 — с торможением в конце хода поршня при его движении в обе стороны.1.2. Поворотные гидродвигатели типа ДПГ должны изготавливаться со шлицевым концом
вала.1.3. Поворотные гидродвнгателн типа ГДП должны изготавливаться в следующих исполне
ниях:по виду выходного конца вала
1 — шпоночное,2 — шлицевое,3 — шпоночное с коническим полым выходным концом (конусность 1:10),4 — внутреннее эвольвентное шлицевое:
по количеству выходных концов вала
Издание официальное Перепечатка воспрещена© И здательство стан дартов , 1985

Стр. 2 ГОСТ 26058—85
1 — с одним валом.2 — с двумя валами;
по виду исполнения ротораодношиберный,двухшиберный.1.4. Линейные электрогидравлические шаговые приводы типа Г28—2 по виду крепления кор
пуса должны изготовлять в следующих исполнениях;4 — на лапах;5 — на фланце;6 — на цапфах.1.5. Электрогидравлические шаговые приводы типа Г18—2 по виду выходного конца вала
должны изготовлять в следующих исполнениях:цилиндрическое;К — коническое (конусность 1:10).
2. ОСНОВНЫЕ ПАРАМЕТРЫ И ПРИСОЕДИНИТЕЛЬНЫЕ РАЗМЕРЫ
2.1. Основные параметры должны соответствовать указанным: в табл. 1— для гидроцилиндров типа ЦРГ; в табл. 2 —для поворотных гидродвигателей типа ДПГ; в табл. 3 — для поворотных гидродвигагелей типа ГДП;в табл. 4 — для линейных электрогидравлических шаговых приводов типа Г28—2; в табл. 5 — для электрогидравлических шаговых приводов типа Г18—2.
Основные параметры пиро цилиндров ЦРГТ а б л и ц а I
Н о р м * я л а т и п о р а з м е р о в
Н а и м е н о в а н * » п а р а м е т р а
Ц Р Г 3 S X IT X S upr axisxs црг aexiexS Ц Р Г « Х » Х 5 црг «xaxsjupr 60x36x5 ИРГ 63x33x5
Давление, МПа: номинальное максимальное
1620
Диаметр цилиндра, мм 25 32 36 40 45 50 63
Диаметр штока, мм 12 16 18 20 22 25 32
Ход поршня S, мм 100; 250; 500; 630;
800
100; 400; 500; 630
250; 320; 500; 800
200; 320; 630; 800; 1000; 1200
400; 630; 800; 1000;
1200
100; 160; 250; 800;
1000
800НХЮ
Теоретическое усилие на штохе, хН:
толкаюшсс тяиущее
7,656.04
12.869.65
16.2812.21
20.0915.07
25,4319,35
31,423.55
49,8536,99
Номинальная скорость поршня, м/с
П р и м е ч а н и е . В таблице указаны теоретические толкающие усилия при р=16 МПа. Для конкретных размеров гидроиилиндров необходимо определить допустимое значение толкающего усилия из условий продольной устойчивости с запасом не менее 1,5. При расчете следует учитывать длину хода и вид крепления гидроцилиндра.

ГОСТ 26058—85 Стр. 3
Основные параметры поаорогиых гядродвигатсдей типа ДПГТ а б л и ц а 2
Наамевовахке параметраНорме дав типоразмеров
дпп«- ДПГ83 ДПГ1И дппоо ДПГ4СО дппко
Рабочий объем, см* 50 160 400 630 1250 1800Давление, МПа:
номинальное максимальное
Номинальный перепад давления. МПа
162016
Номинальный крутящий момелт, Н-м 160 | 630 1 1250 2000 1 4000 I 6300Максимальный угол поворота. . . . • 270Максимальная скорость поворота.
180
Расход при максимальной скорости поворота, л/мкк 1.6 5.0 12.5 20.0 40.0 63.0
Масса (без рабочей жидкости) кг. нс более 3.5 12.0 35.0 40,0 90.0 100,0
Основные параметры поворотных гидродвигателей типа ГДПТ а б л и ц а 3
Нмменовавя* параметра
Норма > и типоразмеров
5J
8с2
112
§с2
|счi_ . 2
§с2
т8с2
§5U
§Я
епи
18счи
1
с2
1 3 с2
Удельаий объем, см*/рад 6.4 10 40 64 100 200 160 320 255 ПО 400 800
Давление, МПа: номинальное максимальное
2023
Номинальный перепад давления. МПа 20
Номинальный крутящий момент, Н-м 125 196 780 1250 1950 3900 3100 6250 5000 10000 7800 15500
Угол поворота, ...•. не более 240 240 270 270 270 100 270 100 27G 100 270 100
Максимальняя угловая схорсстъ поворота, рад/с 5 5 5 5 4 4 4 4 3 3 3 3
Масса без рабочей жидкости, кг, не более
5 5 20 25 43 46 55 57 98 100 120 125

Стр. 4 ГОСТ 26058—85
Т а б л и ц а 4Основные параметры линейных «парогидравлических шаговых приводов
m i г а - 1
Корма 1Л типпраямерпяНхммтыпяанкс параметре
Г28-22 Г28-33 Г28-24
Диаметр цилиндра, мм 60 63 70
Номинальное давление, МПа 6.3
Номинальное тяговое усилие. Н 7000 10000 14000
Ход штожа, мм 220; 320; 400; 500; 630; 7)0
220; 320; 400; 500; 630; 710
220; 320; 400; 500; 630; 710
Цена импульса, ми: при движении в одву сторону
при реверсе* . •
0,1 ±0,05
0,1-к”
0.05± 0,025; 0.1 ±0.05 0,05 0.1+®-*
0,05±0,025;0.1 ±0.05
‘ 0,05+£>ОД+0.*
Максимальная скорость перемещения штока, м/с 0.8 ■0.4 0.4
Ошибка в перемещении штока без нагрузки. мм, не более ±0.1
Статическая неточность при номинальной пагрузке, мм. не более __________________________________ од___________________________________
Масса (без рабочей жидкости) при наибольшем ходе. кг. не более 40.0 45 2 60.1
Тип шагового электродвигателя ЩД8Д1М
П р и м е ч а н и е Дорускастся зацепа шагцвых двигателей на двигатели постоянного тока с датчиками обратной
Т а б л н ц а 5Основные параметры злсктрогидравлнческих шаговых приводов типа Г18—2
Напмааоваикс параметраНорма хх* тяпорааиврпа
ЭЗ?ГМ-Э) Э32Г11-23 9Э9Г18-34 Э32Г18—2S
Номинальное лавленке. МПа 6.3
Номинальный крутящий момент на выходкой аалу Af„0M, Н-м 11 22 46 92
Рабочий объем, см* 20 40 80 160
Максимальная частота вращения, об/мин 2000 2000 1000 1000
Максимальная частота импульсов. Гц восо 8000 4000 4000
Угловая лискрста, ...в 1.5
Максимальная мощность на выходном палу. кВт 2.2 4.4 4.6 9.2
Статическая неточность при нагрузке 0.7 ...° ±0.8
Расход масла при максимальной частоте врящевия, л/мин 40 80 80 160
Масса (без рабочей жидкости), кг, не более 15,5 22,0 34.3 57,0

ГОСТ 2605ft— 85 Стр. 5
2.2. Габаритные и присоединительные размеры гидродвигателей исполнительных устройств должны соответствовать:
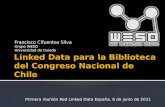
черт. 1 и табл. 6 — гидроцилиндров типа ЦРГ;черт. :2 и табл. 7 — поворотных гидродвигателей типа ДПГ;черт. 3 и 4, табл. 8 и 9 — поворотных гидродвнгателсй типа ГДП;
‘г. черт. 5. табл. 10 и I I — линейных электрогидравлических шаговых приводов типа Г28—2;.... черт. *6 и табл. 12 — электрогидравлических шаговых приводов типа Г18—2.
П-р и м е н а мня:1. Чертежи не определяют конструкцию гидродвигателей.2. Д ля исполнительных устройств промышленных роботов, спроектированных до введения в действие настоя
щего стандарта, допускается применять гидродвигатели, основные параметры н размеры которых отличаются от установленных в настоящем стандарте.
• г Исполнение для геепяенок мнцтом
t,
Черт. 1

Стр. 6 ГОСТ 26058—35
Табляаа 0Габаритные я присоединительные размеры гядроцилнндроа
Р а з м е р ы в мм
Т я п о р 1 9 М«р , D• ( П р е д . OTK*.0 0 H 7)
( п р е д . о т к л . n o H 14)
rfoI f tp e jL o t k j .
BO 4 * )
Uн е O o je e ( п р е д . о т х а .
a o J , I 4 )( г . р и . ОТХЛ.
no h 11)( а р е д . о т к л . n o US)
U P r2 5 x l2 x S M16X1.6 2) MlOxl.25 15 12 171 + S 91.5 + S 35ЦРГ32Х 16xS M22X1.5 27 MUX1.5 17 16 188 + S 100+S 43U P r3«X l8xS M22X1.5 27 M14X1.5 17 20 163 + S I00 + S 47ЦРГ40Х20Х5 M27 X 2 33 M16 X1,5 20 20 221-fS 115+5 51U P r43x22xS M27 X 2 33 MI6X1.5 20 25 •221+S 115+S 57ЦРГ50Х25Х5 .M33X2 39 M20X1.5 25 25 254+ S 132+ S 62ЦРГ63Х32Х5 M42X2 49 M27X2 35 32 297+ S 149+S 75
Продолжение табл. 6Р а з м е р ы в мм
Типореамер Li(пред. оглл. ±1.6)
*• , h(пред. отел, по J,14)
1. ••и»
ме пенсе/.
(пред, откл.
по ыг)
/.(пред, откл.
r ro J , 14)
*•(аред. откл.
по Ы})
R. иг более(пред, откл.
по Ы4) и» более
ЦРГ25Х12Х5 189+S 16 6 38 74 40 2С 50 70 12 17.5UPr33xl6xS 208+S 18 8 42 90 52 23 60 84 14 21.5ЦРГ36Х 18xS 185 + S 18 10 44 95 56 25 65 90 14 23,5ЦРГ40Х20Х5 249+ S 22 12 48 100 ■ 60 28 70 102 16 25.5ЦРГ45Х22Х5 251+S 22 12 50 108 68 30 75 108 16 26,5UPr50 x 25xS 281+S 28 14 50 120 72 32 80 120 20 31.0ЦРГ63Х32Х5 341+S 36 16 58 138 82 45 100 150 26 37.5
Черт. ?

ГОСТ 26058—85 Стр. 7
Т а б л и ц а 7Габаритные н присоединительные размеры поворотных гмдродвнгателсА типа ДПГ
Р а з м е р ы в мм
Типоразмер D(«рад. откл.
по Ы4)(пред, откл.
по М)
О ,(прах.откл.
*0.35)
* *• г 1 * А. а .
{прел. отхл.
Д П Г 1 6 104 75 91 _ 150 62 47 35 15 4 26 30Д П Г 6 3 146 100 126 — 205 72 52 39 20 4 35 — 40 —Д П Г 1 25 200 140 172 194 265 119 95 80 24 5 — 16 — 30Д П Г 2 0 0 200 140 172 194 330 138 114 96 24 5 — 16 — 30Д П Г 400 270 200 236 265 355 148 118 97 30 5 — 16 — 30Д П Г 6 3 0 270 200 236 265 430 176 146 125 30 5 16 30
Продо.икение табл. 7Р а з м е р ы я мм
ь ‘ 4,Тилоразиар(прал- откл.
л d t(■рад. откл. 4 , (прел.
откл.4, 4 , т п а ?
±0.И) по НО) no Нв)
ДПГ16 - - Ь - 6 Х 2 3 Х X 2 8 d l l X X 6 ls7 '
М 8 К '/л* - К М * - е 6 30е ± 2 2 ' 60° ±22'
ДПГ63 b—Юх32хX40dllXX 5 ls7
М 12 KVa* К М ' 6 6 3 0 ° ± 1 8 ' 60° ± 18'
ДПГ125 16 56 b— 8 X 5 2 XX60dllXX l0 is 7
М 1в KVa* M 8 К М ' 6 6 30° ±14' 46° ±14'
ДПГ200 16 56 b-8X52xxeodiix
М16 KVa" М8 — К М * 8 6 30°30'±± 1 4 '
46е ±14'X 101s7
ДПГ400 16 56 b—10X72 X X82dll X
М 20 KVa" М 8 — КМ* 9 8 2 0 ° ± |1 ' 40“± 11*X l2 1 s
дпг&зо 16 56 b—10X72 XX82dllxX l2 is 7
М 20 KVa* М8 КМ » 9 8 2 0 ° ± 1 Г 4У±М '
Габарн-пше ■ прнсоедшкнтыьные размеры гндродаагателей с удельным объемом 6.4 и 10 см*/рлд
Меня«МММ с Мрт щнекоомнн вы/Ынини кнщвнв /вне Меянянемм е efku» шнищвет Ucnaextnrt еМуме шлиае/ына
ituot»vn конце* вале м м я м и п кем чеку /ала
Черт. 3

Стр. 8 ГОСТ ..26056—85
Габаритные и присоединительные размеры гкдродвнгателеД с удельным объемом от 40 до 800 см*/р>Д
Нс толп емче с одном шпоночным выгодны* конце* /а га
исполнение с двумя шпоночными Исполнение с одним шлицевым( выгодными концами вала Выгодным концом Вола
Исполнение с одним шпоночным Исполнение с двумя Выгодными ненцам аконусным Выгодным концом Вола с внутренним юзяьвентным шлицевым
•; соединением
Исполнение с двумя шлицевыми выходными концами вала А
Т а б л и ц а бГабаритные и присоединительные размеры поворотных гцдродвигатедеб
типа ГДП (черт. 3)Р а з м е р ы а мм
Шифр iL
(Пред. ОТКЛ. ±-^>
a(«pea. огкл. ■o h 14)
c(пред. откд. no h 14)
b(сред. откд.
ГДП 11-240-6.4/20 20 185 10 25 8ГДП12-240-6,4/20 20 ___ 213 ___ 25 8ГДП21-240—6,4/20 w_ d -6 x l6 c 8 x 2 0 a l 1x4(8 185 10 ___ 8ГДП22—240- 6.4/20 ___ d—6X I6e8x20al 1 x4f8 213 ___ 8ГДП11—240—10/20 20 — 185 10 25 20ГДП12—240—10/20 20 — 213 — 25 20ГДП21—240—10/20 — d -6 X l6 e8 x 2 0 a l 1x4(8 185 10 — 20ГДП22- 240-10,-20 — d-6X l6c8X 20al 1x4(8 213 — — 20

граз
-яер
-н
-в н
и
____
____
____
Таб
ли
ца
9
ГОСТ 26058—85 Стр. 9
та S S S 5 > i } S S } > S t i S S ! 4 5 5 * t 5 5 5 V В i i^ ^ =r- ^ a« s«a«^ x x x ^ idid
т*x x x x x x x x x x 5 £2 i j i 3 ' 3 4 ' 2 ■ ' ' I i j i i i i ! i i M i i i i иS S S S S S z s z z < <
S E E s E E S S E E E S S E E E E E S i E S E E E E if £ E £ E E E
s i l s s s i s i i s i i i s i i s s s s i x s s s s s s i s s
*9
ю у еч и5 X X
1 1 1 1 1 1 1 I I 1 1 1 | ь 1 1 1 I I 1 1 1 1 1 l = I M 1 1 =Л -а Л X| S a s
•О
•» «© ". « •
l l l l l l l l l l l l x I M I I x ^ l l l 1 x l l l l 1 XI¥ s v « as S o s . . 3
-332 1 | 1 | 1 ! I ! 1 1 i S l 1 I I 1 8 1 1 1 1 1 5 1 1 1 1 1 S I
'■* ' ;
22» 222 2 2 2 2
I I 1 1 I I I I | | | |
M | | 1 1 . Ц M l l M 1 ' 1 1 1 ' M 1 | . . . . 1 I I1 1 1 1 Ц 1 1 I B i s2 2 2 2 I s 3 l 2 * 2 $ | $ 2 $■° ,B ■° ^ 4 4 4 4 4 x 4 x 4 x 4 x
Ii4 Ьи ‘гххо •»»du) / $ •§ I T 3 ' § ' 1 r § ‘g 1 " i T I 0 S 1 H i й » I " 1 ‘Г 1 3 8 Г Г 1 Г
п и т а 1 й 1 П ' й 1 £ ,л! й Г 8 1 & 1 J § " f 8 1 8 г а Г Я г з 1 а 1 S i g Г(уи СИ 'ГХ10■T»dc) »о д и| '4 Г £ ” i s 1 £ 1 * ) * 1 £ 1 g~l g 1 g r g 1 s Г ? 1 t Г Т Т(Ш 0“ »«и•Иби) *о
Й Й"Й Й Й’ ЙЧЙ Й 8 8 8 8 8 g g g i l ' f l S 1 8 1 § я я i 8 1 8 a•пш> -т*&в?<7 а Д 8 8 8 3 * 8 а В В 8 И И й У 1 8 8 8 Ш Й Я И Я И В 8 a s
Шиф
р
| ! § | | § § | § а § ! 1 | § р ! ! ! i s | | |
i i f ^ i i f s s s s f s s s i l l s l l s g l
Ш Ш Ш Ш Ш i u m 4 ^§ § § l i § 5 § § g | | l l i § § § § § § § § gUUUl - . C - t - L - UU. L - — t-L-L-L- U U U U U U U U
i ! i i i i i | i l l l l l l l l i l i l i i 1 I l f I I I l f
ш И ^ Ф - " I " j n ! ? п Ш 2 2 != SJ?;?3 = £ J 5 ;a = 2 « ? 3 « S ! = 2 ? ; ? 3 » S ? = 2 ? ; a « 5 - - « « » 4‘ c c c c c c c c c c c c c c c c c x c x c c x n c c c c c c e g2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 5

Ра
зме
ры
а
м*
Про
долж
ение
таб
л. 9
Стр. 10 ГОСТ 26058—85

ГОСТ 26058—85 Стр. 11
Линейные влектрогидравлнчсскне шаговые приводы
Т а б л и ц а 10Габаритные и присоединительные размеры линейных влектрогидравлическнх
шаговых приводов Р а з м е р ы в мм
в. 1 В, " н, Н, Я. ь. i л. к к , А,Типоразмер
(пред. откл. по h 14)
D<>2« во h 9) не Солее (пред. откл.
±0.2)
(пред, откл.
по К14)
(пред, откл. во Н7)
(пред.отел.±0.3)
(пред.от»л.±0.2)
(пред.откл.±0.1)
Г28-22 100 120 80 211 223 121 212 76 !0Э И ММ 44 100 45Г28—23 108 130 90 217 239 134 218 81 ПО 11 М10 45 ПО 46Г28—24 116 145 90 226 251 150 227 88 122 13 М12 50 122 51
Т а б л и ц а IIПеременные размеры для исполнений линейных здектрогидравлических
шаговых приводов по ходам (черт. I)
мм
И е л о д н е к п еХ о д L м м .
и * м « м « L , . м ы L , . и и | И с п о л н е н и еХ о д L и м .
н е м е н е е £ » . н м £ , . м м
. . . 2 Г 2 8 — 2 . . . 2 2 0 240*0.3 135+185 ...5Г28—2... 500 4 8 0 ± 0 , 4 415 + 485
...ЗГ28—2... 320 320±0.3 235+ 285 ...6Г28-2... 630 560±0,5 545+595
...4Г28—2 — 400 3 9 0 ± 0 . 4 315+365 ...7Г28—2... 700 620*0.5 625+675

стр. го с т i6osd—AS
Электрогидравлнческие шаговые приводы
Д-подвод D- спив
Черт. 6
Т а б л и ц а 12Габаритные и присоединительные размеры алектрогидраадичесхих шаговых приводов
Р а з м е р ы в мм
ТипоразмерЛ
(пред.откд.±OJ)
В(пред.огкл.
Ь(пред, откл. «о ЬЭ|
D D ,
id*(пред,
откд. «о В7)
(пред, откд. во aej
4%<npci. OTIC I.
по нм>
а,4.К
(пред, откд.
яо М7)
iт : 'к
L Lк
Н h\
(яре*.откд.
*-* >(прел. . t , . 0ТИ4. ±4f~) (вред. отил.
±1.0»
Э 32Г 18— — 22; Э 3 2 Г 1 8 - — 22К
72 92 е* т
к и * к м ' 18т г
80 9 М бМ 5
2528
46~ 7Э
518 112 20т « 1
Э 3 2 П 8 — —23; Э 3 2 П 8 — - 2 3 К
92 110 64
к к ' к м * 22_‘22
100 11 Мб" Ж
301 5 "
54" 5 5 "
555 130 2 4 ,5Щ >
Э 3 2 Г 1 8 - - 2 4 ; Э 32Г 18— — 24 К
103 132 10т
К Г К * ' 3232
120
13
м юM I0
4258
7083
6146 И
530 351 7
Э 3 2 Г 18— — 25; Э 3 2 П 8 — — 25 К
1.38 1621210
К 1 W *’ К Н '4242 140 мю
Ш Г58
~W83
110691691 715
4542.9

ГбСГ 26058—BS txp .
2.3. Климатические исполнения гидродвигателей — УХЛ4 и 04 по ГОСТ 15150 69.2.4. Условные обозначения гидродвнгателей должны строиться по следующим структурам.
Для гидроцнлиидров типа ЦРГЦРГ X X - XX X XX X S X----- — ' I Климатическое
I_____ „исполнение
_____Ход поршня, ям
__________ Диаметр штока, мм
__________ Диаметр цилиндра, мм
___________Исполнение по торможению
___________ Исполнение по виду крепления корпуса
__________ Цилиндр для роботов гидравлический
П р и м е р у с л о в н о г о о б о з н а ч е н и я гидроцилиндра с креплением при помощи хомута, с торможением в конце хода, диаметром цилиндра 50 мм, диаметром штока 24 мм, ходом 1000 мм, в климатическом исполнении УХЛ4:
Ц РГ 12—50 x 25x1000 УХЛ4 ГОСТ 26058—85Для поворотных гидродвнгателей типа ДПГ
дпг _х_ _х_|___________Климатическое исполнение
___________Крутящий момент гндродвигателя в Н-м-10-1___________Двигатель поворотный гидравлический
П р и м е р у с л о в н о г о о б о з н а ч е н и я поворотного гидродвигателя с номинальным крутящим моментом 630 Н-м в климатическом исполнении УХЛ4
ДПГ 63 УХЛ4 ГОСТ 26058—85Для поворотных гидродвнгателей типа ГДП
ГДП X X - XXX - X I 20 X
Т- Климатическое.исполнение
Номинальное давление, МПа.Удельный объем, см*/рад
.Угол поворота вала..Число выходных номеров вала
.Исполнение выходного конца вала.Гидродвнгатель поворотный
П р и м е р у с л о в н о г о о б о з н а ч е н и я поворотного гндродвигателя со шпоночным исполнением вала, с одним выходным концом, с углом поворота 270°, удельным объемом 400 см3/рад, номинальным давлением 20 МПа. вклиматическом исполнении УХЛ4:
ГДП 11-270-400120 УХЛ4 ГОСТ 26058-85Для линейных электрогидравличесхих шаговых приводов типа Г28—2 X X X Г 28 — 2 Х_ - Х_
1 | Климатическое исполмеиие________Типоразмер по диаметру цилиндра:
2 — 0 5 0 мм; J — 0 6 3 мм; 4 — 070 мм________ Исполнение по значению цены импульса: А—0,1 мм; без
индекса — 0.05 мм_______ Исполнение по ходу: 2 — 220 мм; 3 — 320 мм; 4 — 400 мм;
5 - 5 0 0 им; 6 — 630 мм; 7 — 710 мм________Исполнение по креплению корпусаП р и м е р у с л о в н о г о о б о з н а ч е н и я линейных электрогндравлических шаговых при
водов с креплением на цапфах, с ходом 400 мм, ценой импульса 0,1 мм, с диаметром цилиндра 63 мм, в климатическом исполнении УХЛ4:
64ЛГ28—23—УХЛ4 ГОСТ 26058-85

Стр. 14 ГОСТ 26058—85
Для электрогидравдических шаговых приводов типа П 8 —2 X уХ XI8— 2 X X 2L
I___________Климатическое исполнение
.Исполнение конца выходного вала
___________Рабочий объем, см*
___________Индекс гидравлического усилителя
___________Гидроусилитель крутящего момента
________Модификация золотника
Индекс шагового двигателя 1
Редактор Е. И. Гмзкоеа Технический редактор Л. Я. Митрофанова
Корректор Н. Н. Чехолина
Сдано в наб. И .00,1$ Под|< в яач. 2ЛСв.8в 2.0 п. Я- 2.0 уел. кр .отт. I.S0 уч.-над. л.•____________Тир. 160(0 Цена 10 коя.___________
Отдав» «Знак Почета» Издательство стандартов. I2JW0, Москва. ГСП. Новэоресвенскка пер.. 3.
Калужская типография стандартов, уд. Московская. 266. >'66

Группа Г17
Изменение Лк 1 ГОСТ 26058—83 Роботы промышленные. (пародию атеди исполнительных устройств. Типы; основные параметры и присоединительные размерыУтверждено и введено в действие Постановлением Государственного комитета СССР по управлению качеством продукции я стандартам от 26.12.90 J t 3325
Дата введении 01.07.91
На обложке и перво» странице под обозначением стандарта указать обозначение: (СТ СЭВ 6883—89).
Вводную часть после слов «гилроцилимдры» дополнить словами: «двухстороннего действия с односторонним штоком на номинальное давление 16 МПа»;
дополнить абзацем: «Все требования, устанавливаемые стандартом, являются обязательными*.
Пункт ».) изложить в новой редакции: «1.1. Гкдроцидиндры изготавливаются следующих исполнений:
по наличию торможения поршня: без торможения;с торможением в койне хода поршня при его движении в обе стороны; по виду крепления;на задней несъемной проушине (MP3);на задней несъемной проушине со сферическим подшипником (МР5); на передних несъемных цапфах (М П ); при помощи хомута.П р и м е ч а н и е . Обозначения видов крепления по ИСО S099. указанные з
скобках, приведены для справок*.Пункт 2.1. После слова «гндроцилиндроз» исключить слова: «типа ЦРГ»; таблицу 1 изложить в новой редакции; (с.к с. 241)
(Продолжение см. с. 241)
239

(Продолжение изменения к ГОСТ 26058—85)•сними» параметры гидреинлиндро» Т а б л и ц а 1
tUnusueXHMC п«р«иетрбДЯХмлгр идлкмдр», им
2f I Я I » | 35 1 « 1 4S го *а 1 аоД »м вн я». МЛ» до 1«
Диаметр штока, мм
<? =1,25 «? — 1,33 ? — 1,40
%10 • 10
121214
141618
161818
182022
20 22 ■ 25
222528
28 •3236
36>045
Теореги- ческая сила при р = 16 ' МПа, кН
толкающаятянущая
<р — 1.25 5.422,00
7,856.05
12,869.75
16,2812.21
20.0916.00
25.4317.58
31.4025.28
49.8541.60
80.3264.16
толкающаятянущая
Ф — 1.33 5.023.77
7.856.04
12.869.65
16.2812,21
20.0915.07
25.4319.35
31.4023.55
49.8536.99
80,3260,29
толкаюшаятя н у щ ая
Ф-= 1.40 5.422.00
7,855.39
12,868.80
16.2812.21
20.0914.03
25.4317.58
'3 1 ,4 021.60
49.8533.60
80.3255.04
Ход, мм НОМИН. до 500 I св 500
пред откл. 4-2.0 1 4-3.2 I 4-4.0Максимальная скорость, м/с. не менее 1.5
Полный90%-ный ресурс при ходе поршня до 500 мм, не ме- иее
ц и к л ов (двойны х х о д о в ) 3-10*суммарный пуль, пройденный поршнем. км
3000
Полная90%-ная наработка до отказа при ходе поршня до 500 мм, не менее
циклов (двойных ходов) 3-10»
суммарный путь, пройденный поршнем. км 300
S (Продолжение см. с. 242)

(Продолжение изменения к ГОСТ 260S8—85)дополнить примечаниями — 2. 3: «2. Предпочтительные значения хода ци
линдра: 25, 50, 80, 100, /125, 160, 200, 250. 3&0, 400. 500 мм. Если необходимо применять другие значения, их следует выбирать по ГОСТ 6540—68.
3. Допуски относятся к ходам до 1250 мм включительно. Для ходов св. 1250 мм допуска устанавливают в стандартах и технических условиях на гядро- цилиндры конкретного типа».
Пункт 2.2. Исключить слова: «черт. 1 и табл. 6 — гидроцилнндров типа ЦРГ»;чертеж 1 и таблицу 6 исключить.Пункт 2.4. Первый абзац. Структуру условного обозначения для гндроци-
лнндров типа ЦРГ и пример условного обозначения пироцилиндра ЦРГ исключить.
(ИУС Лт 4 1991 г.)
242
ГОСТ 26058-85