SISTEMA RESPIRATORIO II: Transporte de gases respiratorio ...

Obtención y Predicción del Patrón Respiratorio mediante Modelado de su Sistema de Control ante Estímulos Hipercápnicos
Alher Mauricio Hernández
Dpto. Ing. Sist., Autom. e Inf. Ind. (CREB), UPC, Pau Gargallo 5, 08028, Barcelona, [email protected]
Miquel Angel Mañanas Dpto. Ing. Sist., Autom. e Inf. Ind. (CREB), UPC, Pau Gargallo 5, 08028, Barcelona, [email protected]
Roberto Rabinovich
Depto. Neumología. Hospital Clínico, Barcelona, España
Salvador Benito Depto. Neumología. Hospital Clínico, Barcelona, España
Pere Caminal
Dpto. Ing. Sist., Autom. e Inf. Ind. (CREB), UPC, Pau Gargallo 5, 08028, Barcelona
Resumen Entender el sistema de control respiratorio y el patrón ventilatorio bajo estímulo de hipercapnia es muy importante para interpretar la agudización de la Enfermedad Pulmonar Obstructiva Crónica (EPOC) y las condiciones de los pacientes sometidos a ventilación mecánica. El propósito de este estudio es el análisis de los parámetros musculares y respiratorios para obtener los más sensibles y característicos ante diferentes niveles de estímulo hipercápnico. Los parámetros que presentaron la mayor variación con respecto al incremento del estimulo fueron los definidos y calculados a partir de las señales de presión. Otros parámetros como la ventilación espirada o fracciones entre parámetros respiratorios son más sensibles a la hipercapnia que el volumen circulante, la frecuencia respiratoria o inclusive la presión espirada de CO2. Los parámetros musculares son obtenidos en los dominios temporal y frecuencial a partir de señales electromiográficas de tres músculos respiratorios. A pesar de la variabilidad que existe entre los sujetos, los músculos más interesantes debido a su activación con mayores estímulos, siguen el siguiente orden: diafragma, esternomastoideo y geniogloso. Además se evalúan tres modelos del sistema de control respiratorio con el propósito de predecir y simular apropiadamente la respuesta al estímulo de hipercapnia. Aunque hay una elevada dispersión en los datos experimentales, son comparados con los resultados de las simulaciones y es posible predecirlos apropiadamente. Palabras Clave: Hipercapnia, actividad muscular, modelos, patrón respiratorio, Sistema respiratorio.
1. INTRODUCCIÓN
La insuficiencia respiratoria aguda (IRA) es la causa más frecuente de admisión hospitalaria y muerte en pacientes con enfermedad pulmonar obstructiva crónica (EPOC). Además dichos pacientes pueden requerir ventilación mecánica y se caracterizan principalmente por presentar desordenes ventilatorios, los cuales conllevan alteraciones gasométricas, específicamente hipercapnia, y una respuesta anormal del centro respiratorio, caracterizado por su patrón respiratorio. La hipercapnia es el principal estímulo y además el más frecuente en la desbalanceada hipoventilación durante episodios de IRA, particularmente en pacientes crónicos. Por lo tanto, la corrección de estas anormalidades en la mezcla de gases sanguíneos es una prioridad clínica. Adicionalmente se sabe que la información de la actividad muscular respiratoria es interesante en casos de agudización del EPOC y en la ventilación mecánica [13] [9]. Sin embargo, no se sabe como usar esta información clínicamente o como obtenerla de manera no invasiva por medio de señales de EMG superficial. Nuestro grupo ha diseñado previamente técnicas de procesamiento de estas señales y se han definido parámetros de la actividad muscular respiratoria y la fatiga durante pruebas de ejercicio realizadas en pacientes con enfermedad pulmonar [6]. El sistema de control respiratorio es un sistema realimentado, no lineal, multivariable, con retardos y continuamente afectado por perturbaciones fisiológicas y patológicas. El problema de control es definido con base en las características de los procesos a controlar y los objetivos a alcanzar. No se conocen con precisión los procesos de control del patrón ventilatorio y de la planta mecánica [12].
XXV Jornadas de AutomáticaCiudad Real, del 8 al 10 de septiembre de 2004

Todos los sistemas de control están destinados a cumplir ciertos objetivos de control (implícitos o explícitos). Por lo tanto, una aproximación para entender el sistema de control respiratorio es descubrir el objetivo de control innato que se ajuste al desempeño observado del controlador. Varios modelos empíricos y funcionales han sido propuestos para describir diferentes aspectos del sistema de control respiratorio [2] [4] [7] [1]. Se ha encontrado una gran variabilidad de los patrones respiratorios debido a la respuesta del sistema de control respiratorio bajo diferentes niveles de estímulo (hipercapnia, hipoxia y ejercicio) [14]. Obtener parámetros que caractericen el patrón respiratorio bajo estímulo de hipercapnia es el resultado de un gran esfuerzo y aún es un tema de estudio abierto. Además, en lo que se refiere al sistema de control respiratorio, el análisis de la actividad muscular respiratoria es muy interesante [13]. Dicha actividad es evaluada por medio de señales electromiográficas (EMG), que están relacionadas con el patrón respiratorio y pueden informar acerca de la agudización del estado del paciente y su condición durante estímulo de hipercapnia.
2. METODOLOGÍA
2.1. INSTRUMENTACIÓN Y SEÑALES
Han sido estudiados trece hombres sanos, voluntarios, [edad (años): 30.9±7.54; estatura (cm): 176.2±4.7; peso (kg): 76.7±7.9]. Las señales de flujo y presión en boca fueron adquiridas con un neumotacógrafo (Valydine - CD257) y un demodulador (Valydine - MP45-1), respectivamente. La señal de presión espirada de CO2 fue medida con un capnómetro (Hewlett Packard - 47210A). Se adquirieron simultáneamente tres señales EMG superficiales de tres músculos respiratorios: geniogloso en la zona submentoniana (GEN � EMG), esternomastoideo (SMM - EMG), y diafragma (DIA - EMG). Las señales EMG fueron filtradas pasabanda (8-400 Hz) y muestreadas a 1 KHz.
2.2. ESTÍMULO DE HIPERCAPNIA
Cada sujeto fue forzado a respirar con una cierta ventilación para simular diferentes niveles de demanda ventilatoria. Durante el experimento, los sujetos permanecieron sentados y respiraron por la boca a través de un tubo conectado a una válvula anti-retorno de baja resistencia a su vez conectada a un cilindro de gas externo con dióxido de carbono (CO2) dotado con un regulador de flujo manual que permitió modificar el nivel de CO2 en la mezcla de gases disponible durante la inspiración del sujeto.
El protocolo se inició haciendo respirar al sujeto una mezcla sin CO2, es decir con la válvula reguladora de CO2 cerrada, posteriormente la válvula fue abierta y progresivamente se aumentó el flujo cada tres minutos hasta conseguir cuatro niveles de estimulación hipercápnica (sobre el volumen circulante). La señal de flujo fue procesada para detectar el inicio de la inspiración y para evaluar la actividad muscular y respiratoria durante cada ciclo. A continuación se seleccionaron los ciclos respiratorios más representativos en cada nivel de CO2 (inclusive antes de abrir el regulador), y fueron analizados. En todos los niveles de estímulo se omitió el primer minuto, que se asumió como período de adaptación del sujeto.
2.3. PARÁMETROS RESPIRATORIOS Y MUSCULARES
Se han calculado múltiples parámetros en cada ciclo respiratorio, pero solo se presentan los más representativos y comúnmente utilizados. Los parámetros respiratorios considerados son los siguientes: presión espirada de CO2 (PETCO2), frecuencia respiratoria (f), ventilación minuto (VE), volumen circulante (VT), flujo máximo (MF), máxima presión inspiratoria en boca (MIP), máxima variación de la presión inspiratoria durante cien milisegundos (PI100), duración de los ciclos inspiratorio, espiratorio y total (TI, TE y TTOT respectivamente), y relación entre VT y TI (VT/TI) y entre f y VT. (f/VT). Se consideraron los siguientes parámetros musculares: amplitud y valor RMS de cada señal EMG (AEMGGEN, RMS-GEN, AEMGSMM, RMS-SMM, AEMGDIA, RMS-DIA), retardos medios positivos y negativos en las correlaciones cruzada entre señales EMG cuadradas que están relacionadas con la sincronización de las señales de energía muscular y el acople temporal [5] (+DelayGEN-SMM, +DelaySMM-DIA, +DelayDIA-GEN, -DelayGEN-SMM, -DelaySMM-DIA, -DelayDIA-GEN). Por otro lado, se calculan algunos parámetros frecuenciales a partir de la función de densidad espectral de potencia (PSD) de las señales EMG: promedio y mediana de las frecuencias (fm y fc), pendientes e intercepciones (INT-GEN, INT-SMM, INT-DIA) de las regresiones lineales dentro del PSD acumulativo [8].
2.4. ANÁLISIS ESTADÍSTICO
Para cada sujeto, se obtiene un valor representativo de cada parámetro a través del promedio de los ciclos respiratorios seleccionados en cada nivel de CO2 inhalado. Se realizan dos estudios estadísticos en cada parámetro con el propósito de evaluar cuáles parámetros son más sensibles al nivel de CO2 inhalado, de esta manera, se identifican los

parámetros que definen mejor el patrón respiratorio durante estimulación hipercápnica. En primera instancia se realiza un análisis tipo ANOVA para los cinco diferentes niveles de estímulo con el fin de cuantificar, con determinado nivel de significación, la dependencia que cada parámetro tiene de la variación del CO2. El segundo estudio es una regresión lineal del par formado por un parámetro normalizado y el nivel de estímulo. Los parámetros son normalizados con respecto al primer valor. La pendiente de la regresión lineal indica el nivel de variación de los parámetros a medida que se incrementa el estímulo. El coeficiente de regresión, indica la variabilidad de la tendencia lineal en el grupo de sujetos.
2.5. MODELOS RESPIRATORIOS
El primer modelo estudiado es descrito por [8] como un sistema con realimentaciones química y neuromecánica, en el cual VE proviene de una optimización que minimiza tanto el trabajo químico como el mecánico:
( ) ( )222 2ln I EJ PaCO W Wα β λ= − + + ⋅! ! (1)
El primer término de la función de coste (1), es el coste químico, en donde α y β son parámetros de la quimiosensibilidad y el intercambio de gases es descrito por:
22 2
863
1
COI
DE
T
VPaCO P CO
VV V
⋅= +
−
!
! (2)
El segundo término en (1) representa el coste mecánico, el cual discrimina el trabajo en las fases inspiratoria y espiratoria:
1 20
1 ( ) ( )TI
I n nT
P t V tW dtT ξ ξ
•• ⋅= ∫ 1 ( ) ( )
TE
E
T TI
W P t V t dtT
• •= ⋅∫ (3)
Donde 1 2 y ξ ξ son factores de eficiencia mecánica y el parámetro n representa la variación no lineal de la eficiencia. PICO2 corresponde al nivel de CO2 inspirado en hipercapnia. P(t) es la presión muscular definida según la fase respiratoria [8]:
21 2( ) 0 IP t a t a t t T= + ≤ ≤ (4)
( )( )( ) ( ) exp I I I I EP t P T t T T t T Tτ= ⋅ − − ≤ ≤ + (5)
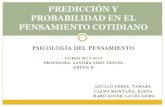
La variación del patrón ventilatorio ante diferentes niveles de estímulo de hipercapnia, es mostrada en la figura 1. Puede apreciarse como la forma de onda se ajusta para realizar el menor trabajo mecánico a medida que el nivel de estímulo se incrementa.
La ecuación del movimiento está basada en un modelo propuesto por [15]:
( ) ( ) ( )rs rsP t V t R V t E= +! (6)
En donde Rrs y Ers son, respectivamente, la resistencia total y la elastancia del sistema respiratorio. El volumen respiratorio, V(t), es obtenido de la ecuación (6). El trabajo mecánico durante la espiración es negativo de acuerdo con la polaridad de las señales ( )V t! y P(t). Esta característica no es apropiada para simular estímulos incrementales como hipercapnia o ejercicio [12], por tal razón, son propuestas ecuaciones alternativas para describir el trabajo mecánico [12] [16].
210
1 2
1 ( ){ ( ) }ITI n n
T
P tW V t dtT
λξ ξ
• ••= +∫ 21 ( )T
I
TE
TT
W V t dtT
• ••= ∫ (7)
En donde tanto λ1 como λ2 son factores de ponderación. Después de algunas simulaciones computacionales con diferentes grupos de valores, se seleccionaron los siguientes: λ1=1, λ2=0.7 y n=5. El segundo modelo evaluado [2] utiliza un mecanismo de control específico: calcula los parámetros del patrón ventilatorio para cada ciclo respiratorio tal como ocurre en el sistema fisiológico (Fig 2). En este modelo el volumen pulmonar varía senoidalmente durante el ciclo respiratorio originando unos intervalos de inspiración y espiración iguales. La frecuencia respiratoria, como
Figura.1: Patrón ventilatorio generado por el modelode optimización [8]. Señales de presión, volumen yflujo. La duración del ciclo se acorta a medida que seincrementa el estímulo.
0 1 2 3 4 50
10
20
30
40 Presión
tiempo (s)
P (cm
H 2O)
0 1 2 3 4 50
10
20
30
40 Presión
tiempo (s)
P (cm
H 2O)
0 1 2 3 4 5-4
-2
0
2
4 Flujo
tiempo (s)
F (l/m
in)
0 1 2 3 4 5-4
-2
0
2
4 Flujo
tiempo (s)
F (l/m
in)
0 1 2 3 4 50
1
2
3 Volumen
tiempo (s)
V (l)
0 1 2 3 4 50
1
2
3 Volumen
tiempo (s)
V (l)

en el anterior modelo, es regulada por el controlador. El modelo matemático completo está descrito en [2]. Mediante este controlador, se incluye el reflejo Hering Breuer [3] permitiendo al controlador modificar el ritmo y la amplitud de la respiración al final de cada ciclo. La frecuencia respiratoria se calcula en el modelo [2] sobre la base del mínimo trabajo respiratorio [10]. La frecuencia depende, entre otras variables, del volumen de espacio muerto, VD, y de la ventilación
alveolar AV! . .
2 2
2
( ) 42
Ars D rs D rs rs D
rs D
E V E V E R V Vf
R Vπ
π− + +
= (8)
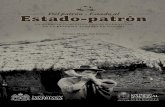
El tercer modelo [1] es el más complejo de los tres analizados (Fig. 3) su autor lo ha llamado Pneuma. Es el resultado de la integración de diferentes modelos relacionados con el sistema cardiovascular y el sistema respiratorio. Fue diseñado con el propósito de simular la dinámica del control cardiorespiratorio durante fases de sueño y ausencia del mismo. Sin embargo resulta útil en la simulación de un amplio rango de estímulos e intervenciones fisiológicas. La arquitectura de Pneuma está compuesta por tres compartimientos principales: el sistema respiratorio, el sistema cardiovascular y el centro de control neuronal. El actuador neuromuscular es parecido al de [8]. El compartimiento encargado de la mecánica ventilatoria recibe señales desde el control neuronal central y genera una señal de flujo ventilatorio basado en la relación entre los músculos respiratorios y el volumen pulmonar [15]. El período ventilatorio es controlado por el centro neuronal central con un generador de ritmo respiratorio fijo donde los intervalos inspiratorios y espiratorios son también constantes.
3. RESULTADOS
3.1. PARÁMETROS RESPIRATORIOS
Los resultados estadísticos de algunos parámetros respiratorios son mostrados en la Tabla 1. Todos sufren un cambio estadísticamente significativo con el estímulo de hipercapnia. Particularmente los índices derivados de la señal de presión en boca (MIP y PI100) presentan las pendientes más elevadas, con altos coeficientes de regresión. VE también se incrementa considerablemente en hipercapnia, aún más que f y VT cuyos coeficientes de regresión son más bajos (recordar que VE es el producto de f por VT). Esto es debido a que los sujetos emplean dos estrategias diferentes para conseguir elevar la ventilación: algunos incrementan más notablemente f y otros VT. El índice f aumenta gracias a la reducción de TI y TE (TI/TTOT≈0.45 durante todo el protocolo). El parámetro f/VT se reduce hacia la mitad del protocolo y luego permanece prácticamente constante (el patrón respiratorio es más intenso al comienzo). La pendiente en VT/TI, que indica el flujo promedio durante la inspiración, es mayor que en VT debido a la reducción de TI cuando se incrementa el estímulo. A pesar del incremento del CO2 inhalado, PETCO2 no presenta una pendiente muy elevada, todo lo contrario, además se evidencia una muy baja variabilidad entre ciclos en cada nivel de estímulo
Fig.2: Diagrama de bloques del sistema de control respiratorio [5]
Fig.3: Diagrama de bloques del sistema de control respiratorio [1]
P�am O2
P�am CO2
PCCO2
PCSFCO2PVBCO2
Sangre venosa cerebral
sangre venosa
VA
P�am O2
P�am CO2
PCCO2
f
dv/dt
sangre arterialmezclada
GENERADORSEÑAL
GENERADORPULSO
RELOJ
OPTIMIZADORFRECUENCIA
CONTROLADORVENTILACIÓN
DETECTORVALOR
MEDIO
PULMONESTEJIDOCUERPO
RETARDOTRANSPORTE
TEJIDOCEREBRO
RECEPTORES
CEREBROSPINALFLUIDO
RECEPTORES
CONTROLADOR
PLANTA
CENTRALES PERIFÉRICOS
Frec. cardiaca
Mecanismo del sueño
Centro neuronal
-Respiratorio
-Autónomo
Estimulo para despertar
Actividad inspiratoriamuscular
Intercambio y transporte de gases
Sistema Respiratorio
Baro-regulación Nodo SA
P.A.Retorno venoso
CirculaciónReflejo
periférico
Sistema Cardiovascular
Respuesta autonómicaSinus carótido
Volumen BombeadoFlujo sanguíneo
Presión pleural
Mecanorreceptores de estiramiento pulmonar
Ritmo respiratorio
Flujo Volumen circulante
Conducción química
Frec. cardiaca
Mecanismo del sueño
Centro neuronal
-Respiratorio
-Autónomo
Estimulo para despertar
Actividad inspiratoriamuscular
Intercambio y transporte de gases
Sistema Respiratorio
Baro-regulación Nodo SA
P.A.Retorno venoso
CirculaciónReflejo
periférico
Sistema Cardiovascular
Respuesta autonómicaSinus carótido
Volumen BombeadoFlujo sanguíneo
Presión pleural
Mecanorreceptores de estiramiento pulmonar
Ritmo respiratorio
Flujo Volumen circulante
Conducción química

(cuatro veces menor que en otros parámetros). También se calcula, para cada sujeto, la correlación de los parámetros respiratorios con la aceleración del volumen al comienzo de la inspiración. El coeficiente de correlación más alto se obtuvo en MIP en todos los casos (0.97±0.10) seguido de cerca por PI100 (0.93±0.10), f y VT.
3.2. PARÁMETROS MUSCULARES
No se encuentran cambios significativos en ningún parámetro muscular con respecto al estímulo, esto debido a la gran variabilidad entre sujetos. Los parámetros con más altas pendientes son presentados en las Tablas II y III. Los coeficientes de regresión no son lo suficientemente altos como para considerar una tendencia lineal uniforme entre los sujetos. No obstante, comparando los tres músculos bajo estímulo de hipercapnia, se observa un incremento más elevado de la actividad en SMM y especialmente pronunciado en DIA, mientras que en GEN permanece prácticamente constante. Parámetros relacionados con el valor RMS indicaron mejor este incremento y mostraron menor variabilidad entre ciclos en cada nivel de PICO2 que los parámetros de amplitud. Dicha variabilidad es más reducida en GEN, mientras en DIA y SMM es mayor. Los parámetros clásicos de frecuencia, como fm y fc no presentaron ninguna tendencia relevante. Sólo las intercepciones a partir de la PSD acumulativa en SMM y DIA se incrementaron con el estímulo, indicando un desplazamiento de la PSD hacia altas frecuencias [8]. Los valores absolutos del retardo promedio entre las señales EMG se incrementaron para los retardos negativos y decrecieron para los positivos, aunque la pendiente no es muy alta. Por otra parte, el coeficiente de regresión y el nivel de significación estadística si son relativamente altos, lo cual indica que hay una mejor sincronización de la activación muscular a mayores niveles de estímulo, por esto hay una mayor concentración de funciones de correlación cruzada de las señales cuadradas en torno al retardo cero.
3.3. MODELOS RESPIRATORIOS
En la figura 4 se presenta un grupo de gráficas en las cuales se comparan los datos reales con los resultados de la simulación de los tres modelos estudiados y una versión modifica de Pneuma en la cual la frecuencia no es constante, sino que sigue las variaciones que se obtienen por optimización en [8]. Los modelos [2] y [8] optimizan la frecuencia respiratoria de tal manera que se realice el mínimo trabajo mecánico, sin embargo en [2] la relación entre TI y TE es siempre la misma (TI=TE), mientras que en [8] dicha relación es un resultado de la optimización. En la simulación de [1] se ha elegido una frecuencia constante (13.4 resp/min) que es el promedio encontrado en la base de datos para el estado basal y se ha mantenido una relación constante entre TI y TE igual al promedio de la base de datos (TI=0.852 * TE). El controlador por optimización de [8] busca un grupo de parámetros {a1, a2, TI, TE, τ} para cada nivel de estímulo hipercápnico. Con el propósito de encontrar una interpretación física para a1 (pendiente de P(t) durante la inspiración), se ha calculado la correlación entre dicho parámetro y otros parámetros reales. El coeficiente de correlación más alto se ha obtenido con MIP (0.85±0.10) en toda la población. Evaluando este parámetro a1, el cual está relacionado con el esfuerzo mecánico, con respecto a la actividad muscular (valor RMS), se obtienen los siguientes coeficientes de correlación: 0.53±0.64, 0.42±0.62 y -0.15±0.75 para DIA, SMM y GEN respectivamente.
Tabla 1: Parámetros respiratorios
Parámetro Pendiente Coeff. Regr. p-valor MIP 0.79684 0.87199 < 10-5
PI100 0.78500 0.72600 < 10-5 VE 0.41418 0.89670 < 10-5
VT / TI 0.36421 0.82820 < 10-5 MF 0.32676 0.93090 < 10-5 VT 0.20107 0.61070 < 10-5 f 0,10679 0,64530 < 10-3
PETCO2 0.09364 0.79596 < 10-5
Parámetro AEMGGEN AEMGSMM AEMGDIA Pendiente 0.03771 0.10998 0.19174
Coef. Regr. 0.15 0.5855 0.4409
Parámetro RMS-GEN RMS-SMM RMS-DIA Pendiente 0.0134 0.08218 0.24537
Coef. Regr. 0.0932 0.5349 0.5370 Parámetro INT-GEN INT-SMM INT-DIA Pendiente 0.19175 2.038 1.6803
Coef. Regr. 0.0435 0.3388 0.2806
Tabla 2: Parámetros musculares
Parámetro Pendiente Coef. Regr. p-valor
Ret + GEN-SMM -0.13011 0.7161 <0.003 Ret + SMM-DIA -0.12369 0.7351 <0.003 Ret + DIA-GEN -0.13013 0.7621 <0.0004 Ret - GEN-SMM 0.12368 0.7330 <0.001 Ret - SMM-DIA 0.13188 0.7605 <0.0002 Ret - DIA-GEN 0.13249 0.7683 <0.0007
Tabla 3: Retrasos positivos y negativos entre señales EMG

4. DISCUSIÓN Y CONCLUSIONES
Se han analizado los parámetros respiratorios y musculares obtenidos de los datos reales a diferentes niveles de hipercapnia. Se encontró que los parámetros provenientes de las señales de presión en boca son los más sensibles y característicos del nivel de hipercapnia, indicando mejor el esfuerzo respiratorio. Otros parámetros como VE o las fracciones entre parámetros respiratorios son más influenciados por la situación de hipercapnia que VT, f, o inclusive PETCO2. Los parámetros musculares se obtuvieron a partir de señales EMG de los tres músculos respiratorios en los dominios frecuencial y temporal. A pesar de la elevada variabilidad entre sujetos, los músculos respiratorios más interesantes debido a su activación con más altos estímulos siguen el
siguiente orden de importancia: diafragma, esternomastoideo y geniogloso. Los parámetros a partir del valor RMS de la señal EMG son más interesantes que las amplitudes temporales. Se encontró mayor sincronización temporal entre los músculos a altos niveles de hipercapnia. Adicionalmente se han evaluado tres modelos del sistema respiratorio, con el propósito de predecir apropiadamente la respuesta al estímulo de hipercapnia. A pesar de la dispersión de los datos reales, al compararlos con los resultados de las simulaciones se puede ver como el modelo [8] predice mejor todas las variables, sin embargo en bajos niveles de hipercapnia, VE es muy baja debido a reducidos valores de VT en estado basal. Por otro lado, la deficiente ventilación alcanzada por el modelo [1] puede ser compensada asumiendo una variación de la frecuencia en función del nivel de estímulo (Fig. 4). De esta forma un modelo �híbrido� entre los propuestos en [1] y [8] se ajusta mejor a los datos reales. El modelo [2] predice apropiadamente la frecuencia cuando el nivel de estímulo es bajo, sin embargo su respuesta no es adecuada en altos niveles de hipercapnia. En la caracterización del patrón respiratorio, los índices más relevantes son los obtenidos a partir de la señal de presión en boca, seguidos por los parámetros musculares provenientes de las señales EMG en el diafragma y el esternomastoideo que a su vez están relacionados con la presión mecánica del modelo del sistema de control respiratorio [8]. Agradecimientos Este estudio ha sido parcialmente subvencionado por una beca del Instituto Colombiano para el Desarrollo de la Ciencia y la Tecnología COLCIENCIAS y CICYT (TIC2001-2167-C02-01) España. Referencias [1] H.H. Fan, and M.C. Khoo, , (2002) �Pneuma � A
Comprehensive Cardiorespiratory Model�, Proc. Annual Int. Conf. IEEE-Eng. in Medicine and Biology Society, pp. 1533-1534.
[2] W. F. Fincham, F. T. Tehrani, (April 1983) �A mathematical
model of the human respiratory system�, Journal of Biomedical Engineering, vol. 5, pp. 125-133.
[3] A.C. Guyton, (1986) Textbook of Medical Physiology,
Saunders, 7th ed. [4] M.C. Khoo, A. Gottschalk and A Pack �Sleep-induced
periodic breathing and apnea: a theoretical study� J. Appl. Physiology, vol. 70, 5, pp. 2014-2024, 1991.
[5] M.A. Mañanas, R. Jané, J.A.Fiz, J. Morera P. Caminal �Time
and frequency analysis of signals from the sternomastoid muscle in COPD patients and control group� IEEE Trans. Biomed. Eng, vol. 2, pp.674-681, 2000.
Datos reales Modelo [8] Modelo [1] con f de [8] Modelo [1] Original Modelo [5]
Datos reales Modelo [1] Original Modelo [5]
Figura 4: Comparación de TI, TE, VT, f, VE y PaCO2 encuatro modelos del sistema respiratorio (línea continuaazul, modelo [11], línea continua magenta, modelo[1], línea punteada roja, modelo [1] con frecuenciacalculada por [11], línea a trazos verde, modelo [5])con respecto a datos reales: puntos negros, en funciónde la cantidad de CO2 inspirado (PICO2)
0 10 20 30 40 50 600
1
2
3
4
5
PICO2 (torr)
TI(s
)
Período Inspiratorio
0 10 20 30 40 50 600
1
2
3
4
5
PICO2 (torr)
TI(s
)
Período Inspiratorio
0 10 20 30 40 50 600
1
2
3
4
5
PICO2 (torr)T
E(s
)
Período Espiratorio
0 10 20 30 40 50 600
1
2
3
4
5
PICO2 (torr)T
E(s
)
Período Espiratorio
0 10 20 30 40 50 600
0.5
1
1.5
2
2.5
PICO2 (torr)
VT
(l)
Volumen Circulante
0 10 20 30 40 50 600
0.5
1
1.5
2
2.5
PICO2 (torr)
VT
(l)
Volumen Circulante
0 10 20 30 40 50 605
10
15
20
25
30
PICO2 (torr)
f (r
esp
/min
)
Frecuencia Respiratoria
0 10 20 30 40 50 605
10
15
20
25
30
PICO2 (torr)
f (r
esp
/min
)
Frecuencia Respiratoria
0 10 20 30 40 50 600
10
20
30
40
PICO2 (torr)
VE
(l/m
in)
Ventilación minuto
0 10 20 30 40 50 600
10
20
30
40
PICO2 (torr)
VE
(l/m
in)
Ventilación minuto
0 10 20 30 40 50 6030
35
40
45
50
55
60
PICO2 (torr)
PaC
O2
(To
rr)
Presión Arterial de CO2
0 10 20 30 40 50 6030
35
40
45
50
55
60
PICO2 (torr)
PaC
O2
(To
rr)
Presión Arterial de CO2

[6] M.A. Mañanas, J.A.Fiz, J. Morera and P. Caminal "Analyzing dynamic EMG and VMG signals of respiratory muscles" IEEE Engineering in Medicine and Biology Magazine, 6, p.125-132, 2001.
[7] M.A. Mañanas, C. Navarro, S. Romero, R. Griñó, R.
Rabinovich, S. Benito, P. Caminal �Control system response of different respiratory models under ventilatory stimuli and pathologies". Proc. 15th IFAC World Congress on Automatic Control, pp.2317-2322, 2002
[8] M.A. Mañanas, J.F. Alonso, Z. L. Topor, E.N. Bruce, P.
Houtz and P.Caminal, �Frequency Parameters from Myographic Signals for the Evaluation of Respiratory Muscle Activity during an Increased Ventilatory Effort,� Proc. Conf. IEEE-EMBS, CDROM, 2003.
[9] J.S. Mecklenburgh and W.W. Mapleson �Ventilatory
assistance and respiratory muscle activity. 1: Interaction in healthy volunteers�. Br. Jl. Anaesth. no.89(4), pp.422-33, 1998.
[10] A.B. Otis, W.O. Fenn, and Rahn, H., (1950) �Mechanics of
breathing in man�, J. Applied Physiology. 51,4, pp.963-978. [11] C.S. Poon, S.L. Lin, O.B, Knudson �Optimization character
of inspiratory neural drive�, J. Appl. Physiology, vol. 72,5, pp. 2005-2017, 1992.
[12] C-S. Poon �Respiratory models and control,� The Biomedical
Engineering Handbook, CRC Press, Inc, 1995. [13] M.J. Tobin, F. Laghi and A. Jubran �Respiratory muscle
dysfunction in mechanically-ventilated patients�. Mol. Cell. Biochem, no.179(1-2), pp. 87-98, 1998.
[14] M.J., Tobin "Advances in mechanical ventilation". New Engl.
J. Med., 344, pp. 1986-1996, 2001. [15] M. Younes, W. Riddle �A model for the relation between
respiratory neural and mechanical outputs. II. Methods�, J. Appl. Physiology. vol 51, pp,979 � 989, 1981.
[16] M. Younes, W. Riddle �Relation between respiratory neural
output and tidal volume�, J. Appl. Physiology. vol 56, pp,1110 � 1119, 1984.