Nxt programming Propuesta
18
NXT PROGRAMMING Julián Esteban Munar Garzón 21 Amyad Mustafa Yasser Sanabria 22 903 Colegio Nacional Nicolás Esguerra
-
Upload
julianmunar903 -
Category
Education
-
view
37 -
download
0
Transcript of Nxt programming Propuesta

NXT PROGRAMMING
Julián Esteban Munar Garzón 21Amyad Mustafa Yasser Sanabria 22903
Colegio Nacional Nicolás Esguerra

Ruta de ingreso

1. Reproducir sonido
Se desplaza el icono del parlante a la pestaña de “altavoz”
Se selecciona el sonido que se va a escuchar
Por último, oprima el botón play y automáticamente se reproducirá el sonido

02. Utilizar pantalla
Se selecciona el icono que dice “visualizar”.
En el cuadro que esta en la parte inferior y en donde dice “archivo” seleccionamos el icono que dice LEGO miniging head.

Seleccionamos el siguiente icono que es como un reloj y lo arrastramos a su lado derecho.
En el cuadro de abajo en donde dice “segundos” se le proporcionaran 3 segundos.
De nuevo se selecciona el icono de “visualizar”

En “archivo” se selecciona reiniciar.
Luego se le presiona play.

03. Avanzar
Se selecciona el ícono “Mover”.
Se selecciona las utilidades y las funciones se que este sirve.

Se le presiona “play”.

04. Retroceder
Se selecciona de nuevo el icono de “Mover”.
Pasamos al cuadro de abajo pero en este caso seleccionamos la flecha que va hacia abajo.
Y por ultimo seleccionamos descargar.

05. Acelerar
Se selecciona de nuevo el ícono de “Mover”.
Seleccionamos 50 de potencia y presionamos en “Flotación”

Se selecciona otra vez un nuevo icono de “Mover”
Ahora su potencia cambiará a 100 y se selecciona “freno”.
Seleccionamos en descargar

Aplicación de utilidades de paleta común 1-5

06. Girar
Se selecciona el icono de “Mover”.
Se selecciona el ángulo de giro.

07.Cambio de sentido
Se selecciona el icono de “mover”
Se selecciona el angulo de cambio de sentido

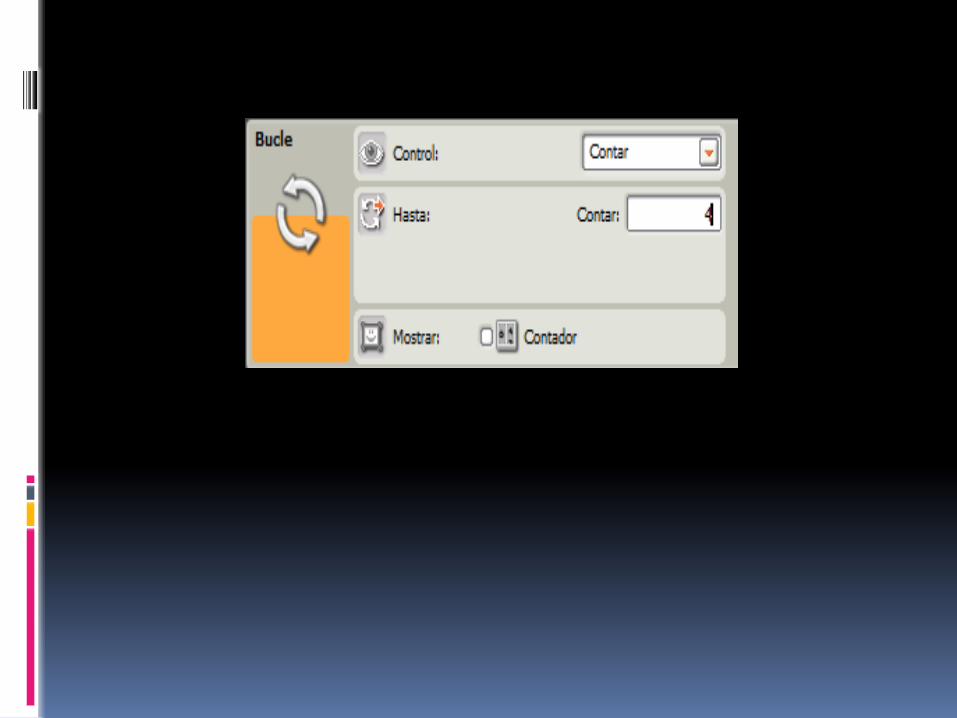
08.Avanzar en cuadrado
Se selecciona el icono “bucle”.
Se selecciona el control que se requiere, en este caso es “contar”.
Se selecciona “hasta” y se la aplica el n° de lados que se requiere (4).

Propuesta
Podemos hacer que el robot avance en forma de cuadrado a la distancia y velocidad que el usuario desee