Nota de Gravitación

of 149
-
Upload
javier-zas-arregui -
Category
Documents
-
view
223 -
download
0
Transcript of Nota de Gravitación
-
7/29/2019 Nota de Gravitacin
1/149
Gravitacion
Universidad de Santiago de Compostela
9 de enero de 2013
-
7/29/2019 Nota de Gravitacin
2/149
Indice general
1. Introduccion 6
1.1. La teora de la gravitacion de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2. Los lmites de la teora de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3. Primer intento: extensiones relativistas de la Teora de la Gravitacion de Newton . . . 7
1.3.1. El origen de la masa inercial y la propuesta de Mach . . . . . . . . . . . . . . 9
1.4. El Principio de Equivalencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4.1. Primera observacion: masa inercial = masa gravitatoria . . . . . . . . . . . . . 9
1.4.2. Segunda observacion: masa energa . . . . . . . . . . . . . . . . . . . . . . . 91.4.3. Tercera observacion: apantallamiento local de la gravedad . . . . . . . . . . . . 10
1.4.4. Observador asociado a un movil acelerado . . . . . . . . . . . . . . . . . . . . 11
1.5. Gravitacion y Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5.1. Cuarta observacion: Gravedad = Geometra No Eucldea . . . . . . . . . . . . 14
2. Geometra Diferencial en Variedades 15
2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2. Sistemas Generales de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3. Espacio Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.1. Curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.2. Funciones F(M) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3.3. Vectores Tangentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4. Tensores Generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.1. Co-Vectores Tangentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.2. Tensores de Rango (p, q) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5. La Derivada Covariante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5.1. Ejemplo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5.2. Transporte Paralelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.5.3. Conexion Afn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.5.4. Derivada Covariante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5.5. Derivada Direccional Covariante . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1
-
7/29/2019 Nota de Gravitacin
3/149
2.5.6. Tensores Covariantemente Constantes . . . . . . . . . . . . . . . . . . . . . . . 28
2.5.7. Geodesicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3. Variedades de Riemann 30
3.1. Variedad de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.1. Metrica Inducida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.1.2. Compatibilidad de la metrica y la conexion afn . . . . . . . . . . . . . . . . . 32
3.1.3. Geodesicas en Variedades de Riemann . . . . . . . . . . . . . . . . . . . . . . . 34
3.1.4. Operadores diferenciales, Gradiente, Rotacional, Divergencia, etc. . . . . . . . 35
3.1.5. Densidades Tensoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2. Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.1. Metricas y Coordenadas Curvilneas. . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.2. El Tensor de Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.2.3. Curvatura y Coordenadas Globalmente Inerciales . . . . . . . . . . . . . . . . . 42
3.3. Curvatura e integrabilidad del transporte paralelo . . . . . . . . . . . . . . . . . . . . 42
4. Teora de la Gravitacion de Einstein 46
4.1. El Principio de Equivalencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.1.1. El Potential Gravitatorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.2. Partculas Libres en Campo Gravitatorio . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2.1. El Potencial Gravitatorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2.2. Gravedad y Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2.3. Desviacion Geodesica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3. Dilatacion temporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.4. Electrodinamica acoplada a Gravedad . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.4.1. Formalismo Variacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.5. Dinamica del Campo Gravitatorio Libre . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.5.1. La Identidad de Bianchi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.6. Acoplamiento a las Fuentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.6.1. Ejemplo: la electrodinamica como fuente de campo gravitatorio. . . . . . . . . 60
4.7. Lmite Newtoniano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.7.1. Unidades Geometricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.8. Invariancia Gauge y Conservacion de la Corriente. . . . . . . . . . . . . . . . . . . . . 64
5. Soluciones y Partculas de Prueba 66
5.1. La Metrica Isotropica y Estatica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.1.1. La Solucion de Schwarzschild . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.2. Partculas de Prueba . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.2.1. Simetras y Cantidades Conservadas . . . . . . . . . . . . . . . . . . . . . . . . 70
2
-
7/29/2019 Nota de Gravitacin
4/149
5.2.2. Vectores de Killing en la Metrica de Schwarzschild . . . . . . . . . . . . . . . . 71
5.2.3. Geodesicas de la Metrica de Schwarzschild . . . . . . . . . . . . . . . . . . . . . 72
5.2.4. Partculas Masivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745.3. Accion del campo gravitatorio sobre giroscopos de prueba . . . . . . . . . . . . . . . . 79
5.3.1. Precesion Geodetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.3.2. Arrastre de sistemas inerciales . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.3.3. Acreccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6. Solucion Interior de Schwarzschild 86
6.1. Dinamica relativista de fluidos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.1.1. Caracterizacion Macroscopica de un Fluido Relativista . . . . . . . . . . . . . . 86
6.1.2. Fluidos Perfectos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.2. Solucion Interior de Schwarzschild . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916.2.1. Construccion de una Estrella . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.3. Evolucion Estelar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6.3.1. Presion de Degeneracion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.3.2. Enanas Blancas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.3.3. Estrellas de Neutrones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7. Agujeros Negros 104
7.1. Singularidades y Pseudo-singularidades . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
7.1.1. Estructura Causal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
7.2. Coordenadas Bien Comportadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.2.1. Coordenadas de Kruskal-Szekeres . . . . . . . . . . . . . . . . . . . . . . . . . . 111
7.2.2. Extension Maximal de la Geometra de Schwarzschild . . . . . . . . . . . . . . 114
7.2.3. Diagramas de Carter-Penrose . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
7.3. Agujeros Negros Cargados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
7.3.1. Agujeros Negros Rotantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
7.4. Agujeros Negros y Termodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7.4.1. El Proceso de Penrose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7.4.2. Radiacion de Hawking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
8. Ondas Gravitacionales 129
8.1. Teora Linealizada de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
8.1.1. Simetra Gauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
8.1.2. Fijacion del gauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
8.2. Ondas Gravitatorias en el Vacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
8.2.1. Ondas Planas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
8.2.2. Efecto de una onda plana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
3
-
7/29/2019 Nota de Gravitacin
5/149
8.2.3. Energa y Momento de una Onda Plana . . . . . . . . . . . . . . . . . . . . . . 136
8.3. Radiacion Gravitacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
8.3.1. Gauge TT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1408.4. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
8.4.1. Oscilador lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
8.4.2. Sistema binario de estrellas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
8.5. Deteccion de Ondas Gravitatorias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
8.5.1. Deteccion directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
8.5.2. Deteccion indirecta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Bibliografia
1. Manuales
[1.1] B.Shutz; A First Course in General Relativity, Cambridge.
[1.2] S. Weinberg; Gravitation and Cosmology, Wiley.
[1.3] Misner, Thorn and Wheeler. Gravitation, Wiley.
[1.4] R. M. Wald: General Relativity, Univ. Chicago Press. (Bib. Fs. 3-A04-6)
[1.5] H. Stephani, An Introduction to the Theory of Gravitational Field, Cambridge.
[1.7] I.R. Kenyon, General Relativity, Oxford. (Bib. Fs. A04-51)[1.8] J.L. Martin, General Relativity, Prentice Hall. (Bib. Fs. A04-66)
[1.9] H.C. Ohanian, Gravitation and Spacetime, Norton. (Bib. Fs. A04-32)
[1.10] Philippe Tourrenc, Relativity and Gravitation, Cambridge Univ. Press. (Bib. Fs. A04-19)
[1.11] William D. McGlinn Introduction to Relativity, John Hopkins Univ. Press. (Bib. Fs. A04-35)
[1.12] James B. Hartlee, Gravity, an Introduction to Einsteins General Relativity, Addison Wesley,(Bib. Fs. A04-86).
2. Analisis Tensorial y Geometra Diferencial
[2.1] Nakahara: Geometry, Topology and Physics. Adam Hilger (Bib. Fs. 3-A02-205)
[2.2] B.Shutz; Geometrical Methods in Mathematical Physics. Cambridge
3. Otras Lecturas Recomendadas
[3.1] Robert Geroch: General Relativity. Univ. Chicago. Press (Bib. Fs. 3-A04-28)
4
-
7/29/2019 Nota de Gravitacin
6/149
[3.2] Clifford M. Will ; Was Einstein right?. Oxford (1986).
[3.3] Clifford M. Will; Theory and experiment in gravitational physics, Rev. ed. Cambridge
4. Direcciones en la Red sobre Gravitacion y Temas Relacionados.
[4.1] Gravitacion, Facultad de Fsica - USChttp://aiff.usc.es/ fpjamas/paxina.html
[4.2] Sean M. Carroll, Lecture Notes on General Relativityhttp://preposterousuniverse.com/grnotes/
[4.3] John Baez, General Relativityhttp://math.ucr.edu/home/baez/gr/gr.html
[4.5] Orbits in Strongly Curved Spacetimehttp://www.fourmilab.ch/gravitation/orbits/
[4.6] Relativity Tutorialhttp://www.astro.ucla.edu/ wright/relatvty.htm
[4.7] Neds Wright Tutorial on Cosmology and Gravitationby Ned Wright.http://www.astro.ucla.edu/ wright/cosmolog.htm
[4.8] Living Reviews in Relativityhttp://relativity.livingreviews.org
5
-
7/29/2019 Nota de Gravitacin
7/149
Captulo 1
Introduccion
1.1. La teora de la gravitacion de Newton
1.1.0.1 Masa inercial.
El segundo principio de la dinamica de Newton 1 afirma que cada cuerpo posee una cantidad intrnsecaque parametriza su resistencia a la aceleracion, llamada masa inercial
F = mia (1.1)
donde F es la resultante de las fuerzas que actuan sobre el cuerpo. En esta ecuacion mi mide laresistencia al cambio de velocidadde un cuerpo cuando se le aplica una fuerza. Esto es lo que conocemospor inerciaEsta ecuacion, y por tanto mi son universales, y no dependen del origen fsico de las fuerzasque se apliquen.
1.1.0.2 Masa gravitatoria.Como caso particular, Newton estudio la fuerza de gravedad que debera gobernar el movimiento de loscuerpos celestes. En su formulacion, la gravedad esta codificada en una funcion denominada potencialgravotatorio (r).
Dado un potencial concreto, los cuerpos perciben una fuerza gravitatoria proporcional al gradiente dedicho potencial
Fg = mg . (1.2)Ademas, llego a la conclusion de que la propia presencia de materia es la causante de la aparicion deun campo gravitatorio. El potencial tiene su origen en la densidad de masa, mg/V ol a travesde la ecuacion lineal
= 4Gg (1.3)
La constante mg posee un caracter netamente distinto de mi. Es una cantidad que especifica elacoplamiento a la fuerza de gravedad, es decir, una carga gravitatoria, y G = 6, 63 1011 m3/kg s2
es una constante universal con dimensiones. Sin embargo, algunos anos antes, Galileo 2 haba mostradoque la aceleracion que sufren los cuerpos debida a la fuerza de gravedad es universal. En terminos demecanica de Newton podemos trasladar esta observacion a la siguiente igualdad experimental paratodo cuerpo
mi = mg (1.4)
1Isaac Newton, 1642-17272Galileo Galilei (1564-1642)
6
-
7/29/2019 Nota de Gravitacin
8/149
con lo que a = es una ecuacion valida para todos los cuerpos. La igualdad observada por Galileofue verificada hasta el lmite mg/mi = 1 109 por el baron hungaro Roland von Eotvos en 1889.Una precision de semejante calibre no poda ser accidental, y el postulado que afirma que ambas
magnitudes son iguales para todos los cuerpos y todas las fuerzas mecanicas constituye el denominadoPrincipio de Equivalencia Debil.
1.2. Los lmites de la teora de Newton
A principios del siglo XX, hay una acumulacion de observaciones que indican la necesidad de mejorarla teora de la gravitacion de Newton.
Experimentales: La mas importante en la epoca de Einstein era sin duda la precesion del periheliode los planetas en el sistema solar. Entre ellos destaca la de Mercurio, con 43 de arco por siglo.
Teoricas : La mas importante es el hecho de que no es compatible con la Relatividad Especial.Otra, no menos importante es que las ecuaciones (1.3) que determinan el campo gravitatorioson lineales. Sin embargo si la gravedad se acopla a la materia y esta no es mas que energa enreposo, entonces uno esperara un acoplamiento de la gravedad a s misma a traves de la energaque genera. En conclusion, parece razonable esperar que la teora correcta debe ser no-lineal.
Una dificultad analoga surge con la mecanica cuantica, la cual predice una energa E = para los fotones. Por tanto, a pesar de tener masa nula, los rayos de luz deberan verse influidospor la presencia de un campo gravitatorio. La verificacion expetimental de este hecho es sinembargo posterior a la Teora de la Gravitacion de Eisntein, por lo que constituye mas bien unaprediccion. Entre ellos debemos citar la curvatura de los rayos de luz 3 y el corrimiento al rojode rayos de luz ascendentes en un campo gravitacional 4.
1.3. Primer intento: extensiones relativistas de la Teora de laGravitacion de Newton
En sentido estricto, los argumentos anteriores solo permiten concluir que el modelo de gravedad deNewton debe ser tomado como una aproximacion valida en el regimen de velocidades no-relativistasy campos gravitatorios debiles. Ya hemos visto como la ecuacion de la fuerza de Lorentz adoleca deun defecto analogo. La extension relativista de esta ecuacion pudo realizarse con exito, y nada pareceimpedir un programa analogo en este caso. El formalismo variacional nos proporciona un mecanismomuy potente incorporar principios de simetra. En general, la accion de una partcula acoplada aun cierto agente externo siempre contendra un termino cinetico libre, que sobrevive en el lmite deacoplamiento nulo. Consideraciones de simetra Lorentz y de reparametrizaciones de la curva nosconducen a un funcional proporcional a la longitud invariante de la curva descrita por la partcula.
Sp.l. = mf
i
dx
d
dx
d= m
ds (1.5)
A partir de aqu la interaccion con un campo externo no es unvoca. Para empezar tenemos libertadpara elegir rango tensorial del campo en cuestion. As podemos escoger un escalar (x) o un vector
3F.W. Dyson, A.S. Eddington y C. Davidson 19194Pound y Rebka 1959 y Pound y Snider, 1965
7
-
7/29/2019 Nota de Gravitacin
9/149
A(x), o un tensor de rango dos K(x), etc. En el captulo de relatividad estudiamos como elacoplamiento mas sencillo a un campo vectorial
Sint = efi
dx
dA(x)d
permite describir la dinamica de una partcula cargada en presencia de campos electricos E, y magneti-cos B, los cuales forman las componentes de un tensor antisimetrico F(x) = A A.El hecho de que la gravitacion de Newton venga descrita por el potencial gravitatorio , induce apensar que deberamos probar con terminos de acoplamiento a una funcion escalar. El unico terminoinvariante Lorentz y bajo reparametrizaciones de la curva que podemos escribir es
S = mf
i
(x())
dx
d
dx
dd (1.6)
Ejercicio 1.3.1. Considera la accion relativista de una partcula acoplada a un campoescalar
S = m
e(x())
dx
d
dx
dd 1
8G
d4x.
(a) Obten las ecuaciones del movimiento para el campo (x) y para las variablesx().
(b) Resuelve las ecuaciones del campo con una partcula de masa m en reposo en elorigen, en la aproximacion e = 1. Verifica a posteriori que esta aproximacion esvalida para un caso como el del sol m = m y r = R.
(c) Trata ahora la solucion anterior como un campo estatico en el que se mueve unpartcula de prueba. Calcula las magnitudes conservadas y el potencial efectivo parala variable radial. Obten la precesion del perihelio de Mercurio a primer orden.
(d) Toma el l mite de masa nula en las ecuaciones del movimiento y verifica que lacantidad K = pe(x) es una constante del movimiento. Deduce de ello que lastrayectorias de los rayos de luz no se curvan en esta teora.
Aunquela accion propuesta sea respetuosa con los principios de simetra que se consideran fundamentales, lafenomenologa que se deduce de ella no es compatible con la observacion experimental.
Desechados el caso escalar y vectorial, seguiramos intentandolo con un campo tensorial de rango dosK(x), que por simplicidad, empezaremos considerando simetrico.
Puede demostrarse facilmente que esta teora es inconsistente. Sin embargo algo deberamos aprenderde ella, puesto que la fenomenologa que se obtiene es prometedora, con un valor de la precesion del
perihelio de Mercurio 4/3 de su valor experimental, y para la curvatura de rayos de luz correcta.De hecho escribiendo para valores de K(x)
-
7/29/2019 Nota de Gravitacin
10/149
1.3.1. El origen de la masa inercial y la propuesta de Mach
El debate acerca de si el espacio pose un marco de referencia absoluto o no, es muy antiguo. La
autoridad de Newton pareca crear un consenso en sentido positivo.......
1.4. El Principio de Equivalencia
Los sistemas inerciales son el marco en el que se formulan todas las ecuaciones de la fsica no gravita-toria. La construccion de un sistema inercial se realiza mediante experimentos con partculas libres. Sedice de un sistema de coordenadas que es inercial si cualquier partcula libre ejecuta una trayectoria() que verifica
d2i
d2= 0 (1.7)
El principio de equivalencia afirma que, aunque no sean libres, si toda la interacci on que sufren esgravitatoria, todava podemos construir sistemas de referencia donde (1.7) se verifique localmente.Veamos a continuacion la lnea de razonamiento que nos conduce a postular este principio.
1.4.1. Primera observacion: masa inercial = masa gravitatoria
La igualdad de la masa inercial y gravitatoria no es un requisito de la teora de la gravitacion deNewton, que sera perfectamente consistente con mg = mi. Einstein creyo desde un principio que nopoda tratarse de una coincidencia. Su inicial formulacion del Principio de Equivalencia Debil, empiezaa apuntar en la direccion de una conexion con la estructura del espacio-tiempo: los efectos de un campogravitatorio uniforme sobre la dinamica de partculas de prueba son equivalentes e indistinguibles delos de una aceleracion uniforme.
Dicho de otro modo, un observador encerrado en una capsula no podra distinguir, observando la
trayectoria de partculas, una situacion de campo gravitatorio externo uniforme, de otra en la que lacapsula sufre una aceleracion tambien uniforme.
Estamos acostumbrados a asociar observadores con sistemas de coordenadas para el espacio-tiempo,de modo que podemos refrasear la afirmacion anterior en el lenguaje de la mecanica de Newton. Enla teora Newtoniana, si la caida en un campo gravitatorio uniforme se describe mediante
z = g + (otras fuerzas) (1.8)
entonces, en el sistema acelerado en caida libre (x, t) = z gt2 la misma f sica viene descrita por laecuacion
= 0 + (otras fuerzas) (1.9)
Decimos que, de esta manera, hemos apantallado totalmente el campo gravitatorio, y toda la dinamicaque gobierna la mecanica de partculas viene dada por las fuerzas f no-gravitatorias.
1.4.2. Segunda observacion: masa energaCon el advenimiento de la Teora de la Relatividad Especial aprendimos que la masa se relaciona conla energa y el momento. Por ejemplo, parte de la masa de un sistema compuesto proviene de la energade ligadura que procede de la interaccion de sus constituentes. Por tanto parece natural postular quela incapacidad para discernir entre un laboratorio acelerado, o sumergido en un campo gravitatoriouniformese debe extender a todos los experimentos de la fsica, y no solo a los que involucran partculasde prueba. Este es en esencia, el enunciado del Principio de Equivalencia Generalizado.
9
-
7/29/2019 Nota de Gravitacin
11/149
La tendencia inicial es, por tanto, concluir que uno puede conocer las leyes de la fsica simplementeefectuando experimentos en un laboratorio en caida libre. De esta manera, desenchufamosla gravedad,y podemos hacer toda clase de experimentos necesarios para conocer, en el sistema de coordenadas
inercial
, los terminos que de manera generica hemos denominado otras fuerzas. Por ejemplo, lasleyes del electromagnetismo.
Inversamente, una vez conocidas todas esas otras fuerzas, el efecto la gravedad podra simularsemediante el paso inverso a un sistema con aceleracion uniforme y positiva g. Este programa tanoptimista choca con dificultades experimentales y teoricas. Sin embargo, antes de pasar a analizarlasveamos una prediccion que se deriva de la misma.
Supongamos que en una pared del laboratorio abrimos una ventana por la que penetra un rayode luz, que cruza todo el espacio hasta la pared opuesta. Cabe preguntarse si la presencia de uncampo gravitatorio debera afectar la propagacion de dicho rayo. Segun la teora Newtoniana, y siasignamos masa nula a los fotones, estos no deberan curvar su trayectoria en un campo gravitacional.Sin embargo, si el Principio de Equivalencia es correcto, podemos sustituir su efecto por el de unaaceleracion ascensional uniforme del laboratorio. En este caso, y debido a la velocidad finita de la luz
deducimos que el rayo debe verse curvado en su viaje a traves del laboratorio.La deteccion de la curvatura de un rayo de luz que atraviesa un campo gravitatorio sera una pruebade fuego para el Principio de Equivalencia Generalizado, e implicara que efectivamente la Gravitacionse acopla forma universal no solo a la masa, sino tambien a la energa. Tal comprobacion tuvo queesperar hasta 1919.
1.4.3. Tercera observacion: apantallamiento local de la gravedad
Los campos gravitatorios reales no son uniformes mas que a escalas suficientemente pequenas de dis-tancia. Por ejemplo, el campo gravitatorio terrestre converge hacia el centro de la tierra. Si colocamosdos partculas de prueba en puntos separados horizontalmente, las lneas de cada de ambas partculasestaran dirigidas hacia el centro de la tierra, y por tanto seran convergentes. En el sistema de refe-
rencia en cada libre, detectaremos un desplazamiento horizontal convergente si esperamos un tiemposuficientemente largo. Los efectos gravitatorios residuales, responsables de este desplazamiento, sedenominan fuerzas de marea.
Solo una partcula colocada en el centro de masas de la nave, se comportara en el sistema de coordena-das en caida libre exactamente como una partcula libre (parada). Vemos que, por tanto, la violacionde esta buena propiedad de inercialidad en un entorno suficientemente pequeno del centro de masas,es de segundo orden en el parametro de separacion de dicho punto.
En conclusion, en presencia de campos gravitatorios reales, debemos renunciar a la nocion de SistemaInercial Global. No existe tal cosa. En cada punto del espacio-tiempo una partcula de prueba quese mueva en caida libre permitira definir un SRI local, con respecto al cual la fsica realizada en unentorno infinitesimal de dicho punto (del espacio-tiempo) aparecera libre de efectos gravitatorios.
Principio de Equivalencia: En cualquier punto del espacio-tiempo, y en presencia de campos gra-vitatorios arbitrarios, siempre es posible escoger un sistema de coordenadas, (localmente inercial), talque, en un entorno suficientemente pequeno del punto en cuestion, las leyes de la naturaleza adoptenla forma conocida de la Relatividad Especial en el espacio de Minkowski en ausencia de gravitacion.
10
-
7/29/2019 Nota de Gravitacin
12/149
1.4.4. Observador asociado a un movil acelerado
El razonamiento efectuado mas arriba ha sido efectuado en un contexto Galileano. Desearamos
refinarlo y adaptarlo a la Realtividad Especial. Por tanto, debemos empezar por definir lo queentendemos por un observador en caida libre. Su an alogo relativista sera un observador en movi-miento relativista uniformemente acelerado. De manera idealizada podemos pensar que se tratade una sucesion de observadores instantanteamente inerciales, a velocidades relativas superiores.
Recordemos la lnea de universo que traza un movil relativista uniforemente acelerado (MRUA)
x0() =1
asenh a , x1() =
1
acosh a. (1.10)
Notese que (x1)2 (x0)2 = a2, es decir, la linea de universo es una hiperbola en un diagrama deespacio tiempo.
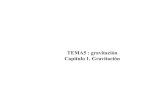
Como primer ejemplo de las dificultades que aparecen, consideremos un observador que esinercial hasta un cierto instante en que sufre una cierta aceleracion durante un intervalo de tiempofinito. A partir de ese momento, el observador vuelve a ser incercial y se mueve con una velocidaduniforme con respecto al inicio. En la figura 1.1, la lnea marca la trayectoria de este movil quepretendemos tomar como observador.
Figura 1.1: Observador acelerado
Abstrayendo el pequeno intervalo en el que el movil se acelera, en los momentos en los que sedesplaza a velocidad uniforme tiene perfecto sentido utilizar este m ovil para trazar coordenadasrectilneas inerciales para dotar de coordenadas al espacio-tiempo. Los dos sistemas de coordena-das se trazan igual que si estuviesemos hablando de dos observadores distintos relacionados por
una transformacion de Lorentz. La diferencia es que ahora pretendemos que se trata de un soloobservador. En la figura apreciamos las dificultades de dotar de coordenadas al espacio usandoeste observador. En efecto, a distancia espacial negativa proporcional a g1 notamos que hay unconflicto para asignar coordenadas a una cierta region del espacio.
Concluimos entonces que, en principio la nocion de observador acelerado podra ser valido sirestingimos el dominio de validez a una region del espacio-tiempo de radio O(g1).
De hecho podemos formalizar un poco mas esto, haciendo uso del movimiento uniformementeacelerado que obtuvimos en (1.10). Para ello, consideremos la figura 1.1 como una situacionintermedia instantanea para un movil uniformemente acelerado. Es evidente que en el instante Tlas coordenadas transformadas se relacionan con las originales mediante una transformacion
11
-
7/29/2019 Nota de Gravitacin
13/149
de Lorentz definida por una cuadrivelocidad U(a, ) = (cosh a, senh a, 0, 0). Podemos entoncesescribir
0(a, ) = cosh a x0 senh a x11(a, ) = senh a x0 + cosh a x12(a, ) = x2
3(a, ) = x3 (1.11)
(1.12)
Los vectores tangentes se transformaran segun la regla covariante
e0(a, ) = cosh a e0 + senh a e1
e1(a, ) = senh a e0 + cosh a e1
e2(a, ) = e2
e3(a, ) = e3 (1.13)
(1.14)
En el instante el observador co-movil esta situado en alguna posicion P() de coordenadasx = z() a lo largo de su propia lnea de universo. En P() el movil tiene a su disposicion tresvectores tipo espacio e1, e
2 y e
3. El punto P() y estos tres vectores definen una superficie tipo
espacio. Un punto tpico sobre esta superficie viene dado p or
x = (iei()) + z() (1.15)
Este hiperplano avanza a medida que lo hace. En algun instante cortara con el punto P0 alcual desea asignar coordenadas. Asigna a ese punto las coordenadas (0 = , i) dado por (1.15).Estos 4 numeros definen las coordenadas relativas al observador acelerado. Haciendo uso de (1.10)llegamos a
x0 = (a1 + 1) senh(a0)
x1 = (a1 + 1) cosh(a0)
x2 = 2
x3 = 3 (1.16)
(1.17)
En la figura (1.2) hemos dibujado los ejes en el sistema inercial de partida x. En efecto,los puntos a 1=cte. describen hiperbolas dadas por (x0)2 (x1)2 = (a1 + 1) que degeneran endos rectas para 1 = a1, tal y como habamos anticipado. Los hiperplanos espaciales 0 =cte.se aplican sobre las rectas x0/x1 = tanh a0. Este ejemplo permite observar todas las patologasmencionadas anteriomente: la coordenada 1 debe restingirse a valores 1 > a1. Mas alla sonambguas al asignar mas de un valor a un solo punto del espacio-tiempo. Mas importante aun, laregion 1 > a1 esta desconectada causalmente de la region II I. Tampoco puede recibir senalesde la region II, ni enviar informacion a la region II I. Eso no ocurre en las coordenadas inerciales,pongamos p or caso x1 > c. Cualquier punto de la region complementaria x1 < c es accesible desdealgun punto de la region x1 > c.
1.5. Gravitacion y Curvatura
Las trayectorias de partculas libres son el instrumento experimental que permite identificar los sis-temas de referencia inerciales. Dos trayectorias de partculas libres que inicialmente se propaganparalelamente, permanecen paralelas. Este es uno de los axiomas que definen el espacio Eucldeo.
12
-
7/29/2019 Nota de Gravitacin
14/149
x0
x1
II
IIII
IV
(1)
1=g1
'0
''0
0=
0=-
0=0
1< g1
1=-g1
Figura 1.2: Sistema de coordenadas asociado a un movil acelerado
En presencia de gravedad no es posible establecer un sistema de referencia inercial global. En particulartrayectorias de partculas inicialmente paralelas pueden acabar intersecando. Un caso analogo sucedecuando trazamos paralelas sobre una superficie curva. Por ejemplo, sobre una esfera, la prolongacionde dos meridianos en el ecuador interseca en los polos. Por tanto, es natural pensar que la geometradel espacio en presencia de gravitacion deja de ser eucldea.
Historicamente, la construccion de los primeros ejemplos de variedades en los que se satisfacen todos losaxiomas de Euclides menos el quinto (axioma de las paralelas), se debe a Gauss5, Bolyai6 y Lobachevs-ki7. En algunos casoso (superficie de curvatura constante positiva), dicha variedad poda modelizarsemediante la inmersion de una superficie bidimensional en el espacio eucldeo tri-dimensional. En otros(superficie de curvatura constante negativa) esto no era posible. De modo que se haca necesaria laobtencion de una tecnica para describir analticamente la geometra de variedades bidimensionales quegeneralizan las eucldeas, haciendo uso de datos accesibles solamente a observadores que habitan dichasuperficie. Gauss se enfrento a este programa y demostro que el conjunto de datos necesarios parareconstruir la curvatura de una variedad bi-dimensional en el espacio tri-dimensional, reside entera-mente en un tensor metrico g. En un conjunto arbitrario de coordenadas, xi, las componentes gij(x)de este tensor especifican la distancia infinitesimal entre dos puntos x = (x1, x2) y (x1 + dx1, x2 + dx2)en la forma
ds2 = g11(x)(dx1)2 + 2g12(x)(dx1)(dx2) + g22(x)(dx2)2
El caso particular de una variedad eucldea bi-dimensional se caracteriza por admitir un sistema decoordenadas globales (1, 2) en el cual tensor metrico tiene por componentes gij = ij . En otraspalabras, la distancia eucldea entre los mismos dos puntos anteriores se escribe
ds2 = (d1)1 + (d2)2 (1.18)
5Carl Friedrich Gauss 1777-18556Janos Bolyai 1802-18607Nikolai Ivanovich Lobachevski 1793-1856
13
-
7/29/2019 Nota de Gravitacin
15/149
Con ayuda de la metrica podemos definir la longitud de cualquier curva. Aparece as la nocion degeodesica, como aquella curva que une dos puntos dados con la mnima longitud. Sobre la esfera, porejemplo, los meridianos son geodesicas, pero los paralelos no.
Posteriormente, Riemann8 fue capaz de generalizar el trabajo de Gauss a variedades de dimensiona-lidad D arbitraria que, por ello, reciben el nombre de variedades de Riemann.
Una caracterstica crucial de la geometra Riemaniana, consiste en la demostracion de que, en unavecindad suficientemente pequena de un punto cualquiera, la geometra se parece a la de una variedadeucldea de la misma dimension tanto como queramos9. En terminos visuales, aunque no podamosdibujar un mapa de la tierra en un plano sin distorsionar las distancias, s podemos hacerlo con granaproximacion con el de una ciudad. El error de distorsion que cometemos es del orden del cocienteentre el radio de la ciudad y el radio de la tierra.
En terminos analticos, en dicha region debe ser posible encontrar un conjunto de coordenadas(1,...,D), tales que la distancia entre x y x + dx viene dada por
ds2 = (dx1)2 + ... + (dxD)2 (1.19)
Lo que distingue a las variedades eucldeas de las no-eucldeas es la imposibilidad de encontrar enestas ultimas un sistema de coordenadas global en el que la ecuaci on (1.19) defina la distancia real.
1.5.1. Cuarta observacion: Gravedad = Geometra No Eucldea
El merito de Einstein fue darse cuenta de la importante similitud que exista entre la descripcion delas variedades de Riemann, y la de la fsica en presencia de gravedad. De esa manera, identifico lainfluencia de un campo gravitatorio con la presencia de un cierto tensor metrico g, y la trayectoriade partculas en su seno, con las geodesicas de la variedad de Riemann asociada.
8Georg Friedrich Bernhard Riemann 1826-18669Esto deb e contrastarse, por ejemplo, con la geometra simpectica, donde la region en la que es posible econtrar
coordenadas (xi, pj) para las que la forma simplectica es constante, se extiende finitamente hasta la singularidad mascercana (Teorema de Darboux)
14
-
7/29/2019 Nota de Gravitacin
16/149
Captulo 2
Geometra Diferencial en
Variedades
2.1. Introduccion
El objeto central de nuestro estudio es el espacio-tiempo. Desde un punto de vista matem atico, elobjeto que mejor parece incorporar sus propiedades fsica es lo que se conoce con el nombre devariedad diferencial.
Una variedad diferencial es una conjunto topologico de elementos (puntos) que localmente resultaindistinguible de Rn, el producto cartesiano de la recta real nveces. Las variedades diferencialespueden ser diferentes cuando se consideran globalmente. As una superficie esferica y un plano sondos variedades distintas, pero muy cerca de un punto, ambas son indistinguibles.
2.2. Sistemas Generales de Coordenadas
En una variedad diferencial, la nocion de sistema local de coordenadas es instrumental. En generalnos encontraremos con una variedad diferencial arbitraria M de dimension D, dotada de un atlascoordenado {O, xi}=1,...,N. En la interseccion O O tendremos las funciones de transicion xi =xi (x).
De modo que, por simplificar la notacion, dos sistemas de coordenadas cualesquiera {xi} y {xi} serelacionan mediante un conjunto de D funciones arbitrarias
xi = fi(x) i = 1,...,D
Un requisito tecnico pero importante exige que el jacobiano no se anule
J =
xixj = fi(x)xj
= 0 .lo cual es condicion necesaria y suficiente para que el cambio de coordenadas sea invertible
xi = f1 i(x) i = 1,...,D
15
-
7/29/2019 Nota de Gravitacin
17/149
M
Rd Rd
U U'
p
x1
x'2x2
x'1
x
(p) x'
(p)
x
(x')
x'(x)
En terminologa mas precisa, un cambio de coordenadas es un difeomorfismo f : RD RD.
A veces la region de interseccion coincide con M. Es el caso del Espacio de Minkowski, dondelos sistemas de coordenadas se identifican con observadores inerciales, los cuales se relacionan
entre s mediante un cambio de coordenadas lineal (transformacion de Lorentz) x = x . Ellose sigue del hecho de que
x
x=
que es una matriz de SO(1, 3) con determinante constante igual a 1.
Sin embargo ahora queremos incorporar cambios no lineales. As por ejemplo, podemos pensaren sistemas inerciales curvilneos, si solamente efectuamos una transformacion que involucre lascoordenadas espaciales
(x0, xi)inercial rectilneo (x0, xi(xj))inercial curvilneo . (2.1)
Un ejemplo caracterstico es el paso a coordenadas cilndricas {x0, x1, x2, x3} {x0; x1 = r, x2 =, x3} con
x1 = x1 cos x2 ; x2 = x1 sen x2 .
La region de interseccion debe omitir el eje {x0; x1 = 0, x2, x3} donde las coordenadas x noson validas (al tener mal definido el angulo x2). Tambien es posible pensar en un sistema decoordenadas , no inercial, si la transformacion no-lineal involucra la coordenada temporal.
(x0, xi)inercial recti lneo (x0(x0, xj), xi(x0, xj))inercial curvil neo . (2.2)
Por ejemplo, un sistema con aceleracion uniforme aa = a2 en la direccion x1 vendra dado por
un cambio de coordenadas {x0, x1, x2, x3} {x0 = 1/a,x1 = a,x2, x3} con
x1 = x1 cosh x0 ; x2 = x1 senh x0 .
16
-
7/29/2019 Nota de Gravitacin
18/149
Como vemos, un sistema no inercial equivale a un sistema de coordenadas curvilneas parael espacio-tiempo. De modo que, en adelante no haremos distincion y hablaremos de sistemas de
coordenadas generales.
2.3. Espacio Tangente
Localmente una variedad diferencial M de dimensiones isomorfa a RD. Ello permite transportar laherramienta del calculo diferencial al entorno infinitesimal de un punto arbitrario.
2.3.1. Curvas
Una curva es una aplicacion de R en M
c : R Mp c(p) (2.3)
Si usamos coordenadas (a, b) R y xi U M para un abierto U en M, entonces la curva vieneespecificada por el conjunto de funciones coordenadas xi().
t
a
b
xi
(t)
c(t)
x1
x2
!
c
!o c
MR
Rd
2.3.1.1 Curvas coordenadas:
17
-
7/29/2019 Nota de Gravitacin
19/149
Un caso importante es el conjunto de curvas que mantienen todas las coordenadas constantes menosuna. Por ejemplo, la curva coordenada asociada a x1 viene dada por
(x1() = , x2,....,xD)
Y as sucesivamente para x2() etc.
2.3.2. Funciones F(M)Una funcion real F(M) es una aplicacion de M en R
: M Rp q(p) (2.4)
Sean xi coordenadas para un abierto U
M, y
(a, b)
R, entonces la funcion sobre M viene
especificada por la aplicacion {xi} (x).La funcion coordenada es una funcion que asigna el valor de la coordenada kesima a un punto p.2.3.2.1 Funciones sobre curvas
f(p)
xi(p)
p
x1
x2
!
f
fo!"1
MR
Rd
Una curva c es una subvariedad de M, y por tanto la restriccion de a c es una funcion de R R.En coordenadas , R
() = (xi())
18
-
7/29/2019 Nota de Gravitacin
20/149
2.3.3. Vectores Tangentes
Un vector es un operador que evalua cuanto cambian en un punto y a lo largo de una cierta curva las
funciones definidas en un abierto que contiene dicho punto.
De manera abstracta sabemos la respuesta d()d . Ocurre, sin embargo, que es una funcion de atraves de las coordenadas de la curva xi(). Por tanto la operacion concreta que hay que realizar es
d
d=
dxi()
d
(x)
xi
Como puede ser cualquier funcion, escribiremos la identidad operatorial
V dd
=dxi()
d
xi= Vi(x())i (2.5)
Se dice que V es un vector tangente a la curva, y Vi = dxi()/d las componentes de dicho vector. La
variacion de una funcion a lo largo de la curva viene dada por la accion del vector tangente V[].Los vectores tangentes a las curvas coordenadas son precisamente las derivadas parciales ei = i.Estos operadores forman una base del espacio de vectores tangentes a M en el punto p. Es decir,cualquier variacion se puede calcular como una combinacion lineal de variaciones a lo largo de curvascoordenadas.
El espacio vectorial de todos estos operadores se denomina Espacio Tangente a la variedad M en elpunto p, Tp(M).2.3.3.1 Cambio de Base
En la region de interseccion de dos abiertos U U tenemos dos sistemas de coordenadas xi y xi adisposicion. Las bases tangentes asociadas seran |ei = i = /xi, y |ei = i = /xi Claramenteuna funcion (p) admite una representacion coordenada en cada base
(x) = (x(x))
Paralelamente, la evaluacion de ei(ei) solo se puede hacer sobre la expresion de la izquierda (derecha).Ambas se relacionan mediante la regla de la cadena
ei() =
xi((x)) =
d
dxi((x)) =
d
dxi((x(x)) =
dxi
dxi
xi(x(x)) = iiei() (2.6)
Como es arbitraria, vemos que la matriz que define el cambio de base coordenada en el espaciotangente esta directamente correlacionada con el cambio de sistema de coordenadas
i = i
ii ii = xi
xi(2.7)
La invariancia de V = Vii = Vi
i implica en la forma usual la regla de transformacion contra-variante para las componentes Vi
= i
iVi, donde las matrices i
i y i
i son, consistentemente,inversas la una de la otra
iii
j =xi
xixi
xj=
xi
xj= ij
19
-
7/29/2019 Nota de Gravitacin
21/149
Ejercicio 2.3.1. Considera la esfera S2 de radio unidad, definida como el conjuntode puntos (x,y,z) R3 sometidos a la ligadura x2 + y2 + z2 = 1. Considera el mapaestereogr afico : U = S
2/(0, 0, 1) R2.
+ : (x,y,z) U+ (x1+, x2+) =
x1 + z(x, y)
, y1 + z(x, y)
R2
: (x,y,z) U (x1, x2) =
x
1 z(x, y) ,y
1 z(x, y)
R2
Halla las funciones de transicion xi = xi(x). Dibuja las curvas coordenadas x
1+ y
x2+ y halla las componentes de una base coordenada tangente en la otra y viceversa.
2.3.3.2 Campo Vectorial
El espacio tangente, Tp(M), es una nocion ligada a un punto p. Un campo vectorial es una eleccionde un elemento de cada espacio tagente, de manera que el resultado sea contnuo y diferenciable.
De manera practica, basta con contar con coordenadas xi en un abierto U M, y dejar que las com-ponentnes Vi que especifican un vector en cada punto sean funciones contnuas y diferenciables dexi.
V = Vi(x)i (2.8)
donde ahora xi = xi(p) y p recorre todo el abierto U. El cambio de coordenadas xi xi(x) ahoraafecta tambien al argumento de las funciones Vi
Vi
(x(x)) = i
i(x)Vi(x)
Advertencia: El espacio tangente Tp(M) tiene dimension finita, igual a la dimension de M. Por contra,el espacio T(M) tiene dimension infinita, puestp que las componentes de un campo vectorial sonfunciones Vi(x) F(M).
2.4. Tensores Generales
2.4.1. Co-Vectores Tangentes
A todo espacio vectorial le esta asociado, de forma natural, un espacio dual cuyos elementos sonfuncionales lineales sobre el espacio original, tambien llamados, 1-formas. En el caso presente, loselementos del espacio co-tangente Tp (M) estan formados por co-vectores o 1-formas tangentes wcuyos argumentos son los vectores de Tp(M)
w| : Tp(M) R|V w|V = a (2.9)
Debido a la bi-linealidad del producto dual, es suficiente con conocer la accion de los elementos deuna base de Tp (M) sobre los de una base de Tp(M), es decir fi|ej = dij . Especialmente util es labase canonica dual ei|, que verifica el conjunto de productos duales
ei|ej = ij
Un co-vector tangente admitira por tanto una expansion w = wi dxi de forma que el producto dualcon un vector arbitrario viene dado por la contraccion natural de componentes.
a = w|V = wiVj dxi|j = wiVjij = wiVi
20
-
7/29/2019 Nota de Gravitacin
22/149
2.4.1.1 Campos de 1-formas:
Al igual que los campos vectoriales, la extension de componentes wi a funciones wi(x) sobre M permite
definir un campo co-vectorial w = wi(x) dxi
T(M).
2.4.2. Tensores de Rango (p, q)
Fijemos coordenadas {xi} para nuestra variedad ( o un abierto de ella), entonces en cada punto labase coordenada {/xi} es un conjunto de elementos de TxM. Analogamente, una combinacion linealdependiente del punto, en la forma V = Vi(x)/xi sera un campo vectorial si y solo si las funcionesVi(x) son C. De forma general, un sistema de coordenadas define una base de dimension Dp+q parael espacio de campos tensoriales TxMpq en cada punto x.
xi1 ...
xip dxj1 ... dxjq (2.10)
Un campo tensorial involucra otras tantas funciones componentes T
i1...ip
j1...jq (x).
T = Ti1...ip j1...jq (x)
xi1 ...
xip dxj1 ... dxjq (2.11)
donde, evidentemente hay que comparar ambos miembros en el mismo sistema de coordenadas, biensea sustituyendo x = x(x) en la izquierda, o bien, x = x(x) en la derecha.
Advertencia: La denominacion tensores generales, hace referencia a que no hay restriccion algunasobre los cambio de coordenadas x x(x) (a parte de los naturales que implican la no-degeneracion ycontinuidad). Por defecto, cuando se omita el calificativo, se entendera que un tensor es general, mien-tra que cuando tratemos con transformaciones restringidas de coordenadas, hablaremos de tensoresminkowskianos, o tensores de rotaciones, o galileanos, etc.
2.5. La Derivada Covariante
Dada una curva x() , podemos definir distintos objetos sobre la misma. Por ejemplo una funcionf() = f(x()), o un campo vectorial V() = V(x()), o un campo tensorial generico.
Ahora desearamos definir una operador que mida la variacion de dicha cantidad. En particular quenos permita saber si este campo es constante o no.
Dado que siempre estamos obligados a trabajar en un sistema de coordenadas, debemos asegurarnos deque el resultado sea una afirmacion intrnseca, independiente del sistema escogido. En otras palabras,debe tratarse de un tensor.
2.5.0.1 Derivadas de Funciones
Para funciones escalares T(M)00 ya conocemos la respuestad
d =
dx()
d
x= U = U()
es la variacion de a lo largo de una curva x() tangente al punto p en la direccion de V. Con-cretamente, la variacion a lo largo de las curvas coordenadas es e() = = ,. Este conjuntode cantidades se transforma como e, es decir, covariantemente (ver (2.6)). Del hecho de que V
se transforme contravariantemente se sigue que la cantidad d/d = U() es intrnseca, es decir,independiente del sistema de coordenadas que se utilice U() = U, = U
,
21
-
7/29/2019 Nota de Gravitacin
23/149
De hecho, la tensorialidad de , permite definir una 1-forma d = , dx. Podemos simbolizar estaoperacion de anadir un ndice tensorial mediante la aplicacion
d : T0
0 T0
1 (d) = , (2.13)
La 1-forma de la cual , forma las componentes covariantes se denomina el gradiente de , d =
, dx. De esta manera, la variacion de en una direccion arbitraria admite dos formulacionesequivalentes
d
d = U[] = U, = d|U (2.14)
2.5.0.2 Derivadas de Vectores
Podemos intentar generalizar el procedimiento anterior para definir la variacion de un campo vectorialV = V(x) T(M)01. Este campo vectorial, en particular, esta definido sobre la curva x().V() = V(x())
|x(). Por lo tanto, parece tener perfecto sentido preguntarse por la variacion de
esta magnitud, a su paso por un punto x = x(p), situado sobre la curva
d
dV() = U(x)V(x())
con U = dx()/d. Notese que es igual que d/d pero a lo largo de la curva coordenada(0, 0,...,x() = ,.., 0). De modo que basta con estudiar la variaci on del campo vectorial en lasdirecciones tangentes a las curvas coordenadas V. Ahora el objeto examinado es mas complejo queuna funcion, y esta compuesto por dos cantidades: componentes y elementos de la base. Ambos puedenvariar, de modo que escribimos
V = (V) + V
()
El primer sumando es la derivada de un conjunto de funciones, y no presenta dificultad. En el segundo
encontramos la expresion () que representa la variacion del campo de vectores que forman la basecoordenadas a lo largo de, precisamente, una de las curvas coordenadas. Evidentemente, la variacionde un vector es un vector, de modo que parametrizaremos la respuesta en la forma generica siguiente
() =
(x) (2.15)
Entonces podemos escribir la respuesta final en la forma siguiente
(V) = (V) + V
= (V + V
)
(V) V; (2.16)
2.5.1. Ejemplo:
Antes de continuar sera util considera un par de ejemplos. El mas familiar es el plano M = R2,dotado de coordenadas cartesianas {x1, x2}. En cada punto de esta variedad, la base de vectorestangentes es {x1 , x2}. La eleccion convencional
xi(xj ) = 0 ijk = 0 (2.17)
22
-
7/29/2019 Nota de Gravitacin
24/149
que no es mas que una manera de decir que la base se mantiene constante a lo largo de las curvascoordenadas. En un lenguage mas apropiado, esta condicion especifica que {x1 , x2} es la base
que especifica la nocion paralelismo, o base de transporte paralelo.
x
r!
r!
r
!
x
y y
x
y
x
y r
!
Cualquier otro sistema de coordenadas es valido. Por ejemplo, en cualquier region de M = R2
que no contenga el origen, podemos utilizar coordenadas polares.
r = (x2 + y2)1/2 x = r cos
= arctany
xy = r sen
Nuestro objetivo ahora es calcular r(),.... etc. Para ello debemos hacer uso de (2.17). Las
bases tangentes se relacionan facilmente
r = cos x + sen y ; = r sen x + r cos y (2.18)Ahora podemos calcular facilmente la siguiente tabla
r(r) = 0 rrr = 0, rr = 0
(r) =1
r rr = 0, r = 1r
r() =1
r rr = 0, r = 1r
() = rr r = r, = 0
(2.19)
Geometricamente es facil interpretar estas variaciones, siguiento la pista a los vectores tangentes
r, a lo largo de curvas coordenadas (r, 0) y (r0, ).
2.5.2. Transporte Paralelo
En el ejemplo anterior, la eleccion de que los coeficientes ijk se anulen en la base cartesiana estotalmente arbitraria. La cuestion esencial es que dicha eleccion fija unvocamente el valor de dichoscoeficientes en cualquier otra base.
23
-
7/29/2019 Nota de Gravitacin
25/149
En el fondo, esto tiene que ver con que la noci on de invariancia, o paralelismo, es una medida relativaa un cierto campo vectorial de referencia, que se declara como invariante. Aquel campo para el cual
i
jk = 0 se dice que define la nocion de transporte paralelo.El mismo es un campo vectorial trans-portado paralelamente. Cualquier otro campo i , no sera invariante, o paralelo, y podemos dar una
expresion general para su variacion
i(j) = i(i
ji)
= (ii
j)i + i
ji(i)
= (ii
j)k
i k (2.20)
Comparando con (2.15) obtenemos
k
ji = k
ii
j,i (2.21)
Es facil comprobar que la lista dada en (2.19) responde a esta formula en el caso particular all reflejado.La nocion de paralelismo es un concepto ligado a dos puntos unidos por una cierta curva. Este hecho se
puede comprender facilmente a partir de la siguiente figura, en la que, un mismo transporte paralelo,conduce a distintos vectores segun que el camino recorrido sea NQP, o simplemente N P.
N
P
Q
Figura 2.1: Dos formas de transportar un vector paralelamente sobre una esfera
2.5.3. Conexion Afn
En la expresion (2.16) reconocemos un objeto nuevo. V; es la componente de un tensor de rango(1, 1). Pero el ndice procede de una derivada. En realidad hemos encontrado una generalizacion de(2.13)
: T(M)10 T(M)11V (V) V;
conV; = V
, +
V
(2.22)
24
-
7/29/2019 Nota de Gravitacin
26/149
Que las cantidades V; forman las componente de un tensor de rango (1, 1) se sigue de la propiaexpresion (2.16). El precio que hay que pagar es la aparici on de un conjunto de funciones, , quedenominamos coeficientes de la conexion afn. Su presencia en esta expresion consiste precisamente
en rescatar la tensorialidad. En efecto, veamos en primer lugar que V
, no se transforman como lascomponentes de un tensor (1, 1).
V, V , = V= (
V
)
=
V
, +
,V (2.23)
Esta expresion es tensorial si y solo si
, =2x
xx = 0. Evidentemente esto se verifica paracambios de coordenadas lineales, como es el caso de las transformaciones de Lorentz, o las de Galileo.Ahora, bajo transformaciones generales de coordenadas x x(x), exigimos que
V; V ; = V;=
(V
, +
V) (2.24)
Haciendo uso (2.23) y operando, encontramos que
V; V ; = V , + V=
V
, +
,V +
V. (2.25)
Igualando ambas expresiones, re-etiquetando ndices, y recordando que
=
obtenemosla relacion siguiente:
=
, (2.26)El ultimo termino se puede transformar un poco debido a que
, = , = + , = ,Finalmente escribimos (2.26) en la forma mas usual:
=
+
, (2.27)
Como imaginabamos, no son las componentes de un tensor, a menos que
, =2x
xx = 0,en cuyo caso V, tambien lo son
1
Ejercicio 2.5.1. Partiendo de la expresion k
ji = k
iij,i y considerando una
composicion de dos cambios de coordenadas x x(x) x(x(x)) obtener la ley detransformacion para los coeficientes de la conexion afn.
Ejercicio 2.5.2. Demuestra que, en la vecindad de un cierto punto x0 , donde haydefinida una conexion (x()), siempre es posible encontrar la base tangente queespecifica la nocion de transporte paralelo.
1Haciendo uso de que , =
, podemos escribibr (2.27) en una forma mas compacta
=
, +
=
; . (2.28)
25
-
7/29/2019 Nota de Gravitacin
27/149
2.5.4. Derivada Covariante
Nuestra intencion es definir una operacion de derivacion llamada derivacion covariante (o conexion
afn) que denotaremos con : Tm
n Tm
n+1, dotada de las siguientes propiedades: si S, T son campostensoriales de rango arbitrario,
DC1. (S + T) = S + TDC2. = para T00DC3. (derivacion) (S T) = (S) T + S (T)
Como vemos, T tiene una componentes con un ndice mas abajo, que denotaremos con un punto ycoma para distinguir su procedencia:
: T1...m1...n (T)1...m1...n T1...m1...n ; . (2.29)
La propiedad segunda afirma que, actuando sobre escalares T00 , la accion de debe producir elgradiente usual, d, es decir = () dx. Escribimos entonces,
: () ; = , (2.30)
El caso de un vector V tambien admite la siguiente solucion
: V (V) = V; V, + V (2.31)que como vemos, involucra una serie de datos nuevos, los coeficientes de la conexion afn.
Tal y como hemos mencionado anteriormente queremos que la derivacion covariante satisfaga la reglade Leibnitz. Veamos que esto es consistente con las dos acciones que hemos encontrado, calculando su
actuacion sobre el producto de una funcion por un vector
(hV); (hV), + (hV)= h,V
+ h(V, +
V)
= h; V + hV; . (2.32)
Por tanto es efectivamente consistente con la regla de Leibnitz. En realidad esto es una imposici oncon la que podramos haber deducido h; = h,, exclusivamente a partir del conocimiento de V
; .
De hecho este va a ser el metodo que seguiremos para obtener la forma de la derivada covariante detensores mas generales.
2.5.4.1 Veamos a continuacion como el conjunto de datos que hay en los coeficientes de la conexi onafn es suficiente para resolver el problema para cualquier tensor. Concretamente si tenemos una1-forma = dx
, podemos contraerla con un vector arbitrario para formar un escalar. Por tanto
(V), = ,V
+ V
, (2.33)
usando, como anunciabamos, la propiedad de derivacion, imponemos
(V); = ;V
+ V; (2.34)
e igualando ambas expresiones, al ser V arbitrario tenemos:
; = , . (2.35)
26
-
7/29/2019 Nota de Gravitacin
28/149
Ejercicio 2.5.3. Demuestra la formula para la derivada covariante de un tensor general derango (m, n):
T1...m1...n ; = T1...m
1...n ,
+mi=1
iT1,...,,...m
1,...,n
n
j=1
jT1,...,m
1,...,,...,n (2.36)
2.5.5. Derivada Direccional Covariante
2.5.5.1 (d/d, , d)En geometra diferencial ordinaria los objetos formales(d/d, ,, d) estaban relacionadosentre s de la siguiente manera.
V[ ] d/d es una expresion abstracta para denotar el vector tangente a una curva pa-rametrizada c(). Se trata de un operador que mide la variacion de las funciones definidassobre una cierta curva. La ecuacion
V[] =d
d= 0
expresa que la funcion es constante a lo largo de la curva c().
Si desarrollamos en una base coordenada tenemos V = d/d = V donde V = (dx/d).
Por tando d y d/d coinciden cuando c() es una curva coordenada ( = x), y en este
caso d/d = = , decimos que es la derivada de en la direccion x .
Ademas sabemos que podemos pensar en las funciones , como las componentes de una 1-forma, debido a que se transforman covariantemente. Llamamos a esta 1-forma , el gradientey d es el operador que genera el gradiente a partir de una funci on
d : T00 T01 d = ()dx (2.37)
Podemos recuperar la derivada direccional () = , a partir de d mediante la contracciondel gradiente con el elemento de la base tangente a la direcci on x, o lo que es lo mismo, lainsercion de este elemento como argumento del gradiente:
, = d| = d() id. (2.38)
Esta forma de pensar es util porque nos permite calcular la derivada direccional en una direcciontangente arbitaria, d/d, como la insercion, ahora, del vector tangente V
d
d= V = d|V = itVd (2.39)
Es evidente el significado de la notacion dV = V, que resumimos diciendo que dV es lineal en
V y aplica funciones en funciones. Esto permite definir un operador derivada direccional.
dV : T00 T00 dV() = itV(d) = d|V (2.40)
2.5.5.2 (D/D, , )
27
-
7/29/2019 Nota de Gravitacin
29/149
De forma ingenua podramos p ensar que d es un operador que tambien interpola entre tensoresde rango (m, n) y (m, n + 1) tal que d : dT dT = T1...m1...n ,1 ... dxn dx, ypor tanto que nos permite repetir el juego anterior en el sentido de que dV : T VT =i
t
VdT dT(...; ...,V)Sin embargo ya sabemos que esto no es cierto mas que en el caso mas bajo m = n = 0, osea para funciones, ya que, como hemos mostrado anteriormente, el subndice , que aparece en(2.5.5) solo es tensorial en ese caso.
La generalizacion covariante de d a tensores generales de rango superior involucra la conexionafn, , de modo que la ecuacion (2.37) se extiende a
: Tmn Tmn+1T = T1...m1...n ; 1 ...... dxn dx, (2.41)
Ahora podemos definir, generalizando de (2.38), la derivada direccional covariante evaluando Ten la direccion deseada
T = it(T) = T(...; ...,)= T1...m1...n ; 1
......
dxn . (2.42)
Analogamente en una direccion arbitraria asociada a una curva de parametro podemos calcularla derivada covariante en la direccion tangente a la curva
D
DT = VT = itV(T) = T(...; ..., V)
= V T1...m1...n ; 1 ...... dxn . (2.43)de donde es evidente que las derivadas direccionales forman un espacio vectorial ya que, de laecuacion anterior vemos que podemos desarrollar en una base
V = V (2.44)En resumen, tenemos dos aplicaciones
: Tm
n Tm
n+1 Deriv. CovarianteV : Tmn Tmn Deriv. Direccional Covariante (2.45)relacionadas mediante
VT = T(...; ..., V) (2.46)
2.5.6. Tensores Covariantemente Constantes
Tenemos a nuestra disposicion un operador diferencial covariante. Por tanto es natural que nos pregun-temos por los ob jetos geometricos que satisfacen ecuaciones diferenciales que involucran la derivadacovariantes. Tomemos por tanto una curva arbitraria x(). Sobre dicha curva podemos definir uncampo tensorial arbitrario T() = T(x()). La ecuacion diferencial
D
DT() = 0 (2.47)
expresa que T es covariantemente constante a lo largo de x(). En efecto, en una base coordenadalas componentes de la ecuacion tensorial (2.47) son
T1...m1...n ;()dx()
d= 0 (2.48)
28
-
7/29/2019 Nota de Gravitacin
30/149
La ecuacion (2.48) es lo mas parecido que podemos definir a un tensor constante. Una conexi on define una nocion de constancia que se denomina transporte paralelo o paralelismo. La solucion ala ecuacion (2.49) depende de la conexion y de la curva x(). Decimos que T() es un tensor
transportado paralelamentepor la conexion a lo largo de la curva c() si en todo punto verifica laecuacion (2.48).
En el caso de vectores V() = V(x()) definidos sobre la curva x(), de tangente V = dx()/d
tenemosD
DV() = 0 dx
()
dV; =
dx()
d(V, +
V
) = 0. (2.49)
Es decir, las componentes de un campo vectorial constante (paralelo) a lo largo de la curva en cuestion,satisfacen la ecuacion ordinaria de primer orden siguiente
dV()
d+ ()
dx
dV () = 0 (2.50)
.
2.5.7. Geodesicas
Cada curva tiene asociada de forma natural un campo vectorial sobre ella, dado por el vector tangenteen cada punto V = dx
d . Una curva cuya tangente sea un vector constante es una geodesica. Laecuacion que verifica una geodesica en coordenadas x() se obtiene de (2.50) particularizando parael caso en el que U = V. Es decir el vector paralelo coincide con el vector tangente
VV = 0 d2x()
d2+ ()
dx()
d
dx()
d= 0 (2.51)
En cierto sentido, las geodesicas son las lneas mas rectas, puesto que sus tangentes se mantienen
paralelas, de acuerdo con la nocion de transporte paralelo que se haya prestablecido.
29
-
7/29/2019 Nota de Gravitacin
31/149
Captulo 3
Variedades de Riemann
3.1. Variedad de Riemann
Una variedad de Riemann es un par (M, g) donde M es una variedad d dimensional y g es un campotensorial de rango (0, 2) que verifica las propiedades siguientes:
1- g es simetrico, gp(V, U) = gp(U, V)
2- g es no degenerada, es decir en cada punto xp, gp(V, U) = 0, U V = 0.
En rigor la variedad de Riemann se llama propiasi gp(U, U) > 0, U = 0. En caso contrario se llamapseudo-riemannianao de metrica indefinida.
3.1.0.1 Dado un sistema de coordenadas
{x
}para (un abierto de) M, podemos expresar g en una
base de Tp (M) Tp (M)gp = g(xp) dx
dx. (3.1)Diremos que g son las componentes de g en el sistema de coordenadas {x}.En adelante omitiremos la referencia al punto xp. Como g es no degenerado, la matriz g, tienedet g = 0, y por tanto existe (g1) g.
gg =
.
Como sabemos, podemos usar este tensor metrico para definir una aplicacion biyectiva entre Tp (M)y Tp(M). En componentes este isomorfismo consiste en la familiar operaci on de subir y bajar ndices.
U = gU ; U = gU .
3.1.0.2 Con ayuda del tensor metrico podemos definir un producto (pseudo) escalar de dos vectores
U V = g(U, V) = gUV = UV = UVy tamien clacular la (pseudo) norma de un vector arbitrario en la forma
|U|2 = g(U, U) = gUU = UUEs necesario notar que no se trata del cuadrado de ningun numero, debido a que en variedades pseudo-riemannianas puede adquirir valores negativos.
30
-
7/29/2019 Nota de Gravitacin
32/149
Una notacion muy extendida para hacer un listado de las componentes de g consiste en calcular lanorma del vector ds = (dx)e. Notar la diferencia entre los numeros dx
y las 1-formas coordenadasdx. La norma
ds2
= g(ds, ds) = gdx
dx
(3.2)
3.1.0.3 Signatura de la Metrica
Consideremos los elementos de matriz g(p) en un punto concreto p M. Debido al hecho de que ges una matriz numerica simetrica, sus autovalores son reales. Si g es riemanniana(o propia), todos losautovalores seran positivos i > 0, pero si g es pseudo-riemannianaocurrira que j < 0 para algunosautovalores.
Sea p el numero de autovalores positivos, y q es numero de autovalores negativos, llamamos al par(p, q) el ndice o signatura de la metrica. Una vez diagonalizada, en un punto arbitrario, mediante unamatriz ortogonal, podemos llevar los autovalores a tomar valores 1 mediante una transformacion deescala sobre los vectores de la base.
Si hemos empezado con una metrica Riemanniana, acabaremos con una matriz diagonal de la forma
= diag(1, 1,..., 1), que denominamos forma eucldea de la metrica, mientras que si empezamos conuna metrica pseudo-riemanniana, finalmente llegamos a una forma pseudo-eucldea de la metrica = diag(1, 1,..., 1,..., 1).
Sea (M, g) el espacio de Minkowski, donde g = en un sistema de coordenadas inercial.Se trata de una variedad pseudo-riemanniana de signatura (1, 3). Por extension, denominaremosLorentziana a una variedad de Riemann (M, g) de dimension d + 1 y signatura (1, g). En unavariedad Lorenztiana distinguiremos tres tipos de vectores U segun su norma
g(U, U) > 0 U es tipo espaciog(U, U) = 0 U es tipo luz o nulog(U, U) < 0 U es tipo tiempo (3.3)
3.1.1. Metrica Inducida
La construccion mas intuitiva de variedades que no satisfacen el quinto axioma de Euclides consisteen encajar superficies bi-dimensionales en el espacio tri-dimensional. Por ejemplo, la esfera S2 de cur-vatura constante, o el toro T2 son dos ejemplos. La metrica que se utiliza para medir distancias sobredichas superficies entre puntos infinitesimalmente separados es la eucldea tri-dimensional. Este pro-cedimiento define una metrica inducida sobre las superficie, y se puede generalizar a dimensionalidadarbitraria.
3.1.1.1 Retraccion de la Metrica
Sean M y N dos variedades diferenciales de dimensiones m y n respectivamente. Supongamos ademasque (N, g) una variedad de Riemann (por ejemplo, el espacio Eculdeo D dimensional). Una aplicaciondiferencial en otra variedad M, f : M N se expresa en coordenadas mediante n funciones de mvariables f : x yi(x) ( = 1,...,m, i = 1,...,n). Un vector ds = dx M induce otro enN ds = dyii con dyi(x) = ( y
i
x )dx. Si exigimos que la (pseudo)norma de ambos vectores sea la
misma, estamos induciendo una metrica en el espacio M que carecia de ella. Explcitamente
31
-
7/29/2019 Nota de Gravitacin
33/149
ds2
N= gij(y(x))dy
i(x)dyj (x)
= gij(y(x)) yi
(x)x
yj
(x)x
dxdx
= g(x)dxdx= ds2|M (3.4)
Llegamos as a la formula para la metrica inducida en este sistema de coordenadas
g(x) = gij(y(x)) dyi
dxdyj
dx(3.5)
Cuando M = N, y f es un diffeomorfismo, esta expresion reproduce la transformacion bajo cambiode coordenadas de un tensor (0, 2). Cuando dimM r). Encontrar la metrica inducida en el toro.
3.1.2. Compatibilidad de la metrica y la conexion afn
Hasta ahora hemos permitido que
fuesen arbitrarios. Ademas hemos investigado la informacionque contienen en terminos de la nocion de transporte paralelo. Nos proponemos mostrar a continua-cion que, si sobre la variedad M coexisten un tensor metrico g, y una conexion afn , debe existiruna relacion de compatibilidad entre ambas estructuras. Para ello trabajaremos en primer lugar encomponentes.
Por un lado estamos familiarizados con el hecho de que usando el tensor metrico podemos subir ybajar ndices tensoriales. En particular, si tenemos V = gV conocemos dos maneras de definirV;:
V; = gV;
32
-
7/29/2019 Nota de Gravitacin
34/149
V; = (gV); = g;V
+ gV; .
La compatibilidad entre estas dos ecuaciones requiere que se satisfaga g; = 0.
Definicion 3.1.1. Sobre una variedad de Riemann (M, g) decimos que una conexion afn escompatible si verifica
g = 0 ( g; = 0 ) (3.7)
3.1.2.1 Otra manera mas intuitiva de obtener esta condicion hace uso de dos campos de vectoresque son transportados paralelamente a lo largo de una curva . Es decir VX = VY = 0 donde Ves el vector tangente. Es suficiente con imponer que el producto escalar de estos vectores se mantengainvariante frente a dicho transporte:
0 = V(g(X, Y))= (Vg)(X, Y) + g(VX, Y) + g(X, VY)= (
Vg)(X, Y) (3.8)
siendo V, X, Y arbitrarios llegamos de nuevo a (3.7).
3.1.2.2 Vamos a ver a continuacion de que manera podemos deducir de esta condicion una ecuacionque relacione las componentes del tensor metrico con las de la conexion afn. Para ello consideremosla siguiente combinacion
0 = g; + g; + g;= g; + g + g
+g, g g+g, g g (3.9)
El conjunto de numeros definidos por
T
= 2[]
(3.10)
forman las componentes de un tensor de rango (1, 2), T, que se denomina de torsion. Haciendo uso deesta la definicion podemos escribir para (3.9)
0 = 2 [ , ] + Tg + T
g 2()g= 2 [ , ] + T + T 2()g (3.11)
donde hemos definido el smbolo de Christoffel de primera especie:
[ , ] =1
2(g, + g, + g,).
Si definimos ademas el smbolo de Christoffel de segunda especie
g [ , ] (3.12)vemos que podemos despejar en (3.11)
() + T() =
(3.13)
admite la descomposicion
= (,) +
[]. Decimos que una conexion es simetrica, si
y solo si el tensor de torsion se anula. En una base coordenada esto implica que los coeficientes de laconexion afn son simetricos en sus dos ndices inferiores, [] = 0 T = 0.
33
-
7/29/2019 Nota de Gravitacin
35/149
3.1.2.3 Es importante resaltar el hecho de que los coeficientes de la conexi on afn se relacionan conlas derivadas primeras de los del tensor metrico. En particular cualquier metrica constante implica
una conexion identicamente nula.
Por ejemplo, en el espacio eucldeo n-dimensional En (Rn, 1) los coeficientes de la metrica song = y por tanto los de la conexion afn se anulan
=
= 0. Esto explica por que,
el transporte paralelo natural en En es aquel que mantiene las componentes constantes en la b asetangente a las coordenadas cartesianas. En coordenadas polares, sin embargo ds2 = dr2 + r2d2 enE2, y calculando encontramos
r =
r =
r
=
1
r
r = r
= r (3.15)
y todos los demas son nulos.
En conclusion, una base coordenada es transportada paralelamente si la metrica es constante endichas coordenadas. Sin embargo esta condicion no es necesaria, y en general no es posible encontrarun sistema en el cual los coeficientes de la conexi on afin se anulen identicamente. Esto refleja el hechode que el transporte paralelo no es integrable, sino que en general depende de la curva que una dospuntos.
3.1.2.4 Noci on geometrica de la conexion de Levi-Civita
La interpretacion geometrica de la conexion de Levi-Civita parte de la consideracion de la variedad(M, g) como una subvariedad de En+m = (Rm+n, 1), de forma que g sea la metrica inducida porel encajamientof : M Rm+n. En general sera necesario que m 1 para conseguir inducir unametrica arbitraria.
As por ejemplo, la variedad bi-dimensional con metrica
ds2
= dx2
+ (sen x)2
dy2
(3.16)puede considerarse como una 2-esfera de radio unidad S2, embebida en R3 con coordenadas (, ),x1 = sen cos , x2 = sen sen , x3 = sen .
El transporte paralelo asociado a la conexion de Levi-Civita utiliza esta nocion de encajamientoparainducir sobre M el transporte paralelo cartesiano asociado a En+m. De esta manera, para transportarVp Tp a Vq Tq consideramos los espacios tangentes como subespacios de En+m. Tomemos ladistancia entre los puntos p y q infinitesimal = . Una vez escogido Vp Tp, decimos que Vq Tq esel transportado paralelamente si su proyeccion sobre Tp es paralela a Vp en el sentido de E
n+m salvoerror de orden O(2).
Como el transporte realmente se lleva a cabo en Rm+n, es obvio que la torsion se anula.
3.1.3. Geodesicas en Variedades de Riemann
La conexion afn permite definir una clase de curvas, las geodesica, que en cierto sentido representanla nocion de curva mas recta, aquella que transporta paralelamente su vector tangente. Por otrolado, en una variedad de Riemann, la existencia de una herramienta para medir distancias permitedefinir la nocion de curva de longitud extremal entre dos puntos. Sea x(t) una curva arbitraria sobreuna variedad de Riemann (M, g). El elemento de lnea invariante bajo cambio de coordenadas esds =
|ds2| dondeds2 = g(x(t)) dx
dx =
g(t)
dx
dt
dx
dt
dt2 (3.17)
34
-
7/29/2019 Nota de Gravitacin
36/149
y por tanto la longitud invariante de la curva es sencillamente
S = ds = 2
1 |gx
x
|1/2 dt (3.18)
Si deseamos conocer la expresion analtica de la curva que minimiza S entre dos puntos extremosdados x1 y x2, nos encontramos con un tpico problema variacional en el que el Lagrangiano es
L = |gxx|1/2. (3.19)La solucion como sabemos viene dada por las ecuaciones de Euler-Lagrange.
d
dt
L
x
L
x= 0 (3.20)
Tenemos qued
dt gx
L 1
2L
g,xx = 0. (3.21)
Podemos multiplicar esta ecuacion por 1/L y sustituir Ldt = ds,
d
dsg
dx
ds 1
2g,
dx
ds
dx
ds(3.22)
tomando la derivada del producto llegamos a
gd2x
ds2+
1
2(g, + g, g,) dx
ds
dx
ds= 0 (3.23)
y contrayendo con g obtenemos, al comparar con (??)
D2x
Ds2=
d2x
ds2+ dx
ds
dx
ds= 0. (3.24)
Esta ecuacion codincide con (2.51) si, como es el caso de la conexion de Levi-Civita
= . En
definitiva, si la conexion y la metrica son compatibles, la geodesica entre dos puntos coincide con lacurva de longitud extremal.
3.1.4. Operadores diferenciales, Gradiente, Rotacional, Divergencia, etc.
Hay algunos casos particulares en los que la derivada covariante adopta una forma muy simple. El m asfamiliar es, por supuesto, la derivada covariante de una funcion escalar que, como sabemos, coincidecon el gradiente:
; = ,. (3.25)
Otro ejemplo muy sencillo es el rotacional de un vector covariante. Debido a que es simetrico en y , el rotacional covariante tiene por componentes
V; V; = V, V,. (3.26)
Sea A = A[] un tensor antisimetrico. Si anadimos a A; dos veces el mismo resultado con losndices permutados, encontramos que, en virtud de la simetra de y a la antisimetra de A,todos los coeficientes se cancelan mutuamente
A; + permutaciones cclicas = A, + permutaciones cclicas. (3.27)
35
-
7/29/2019 Nota de Gravitacin
37/149
Debido a la antisimetra de A, podemos anadir con signo opuesto las permutaciones anticclicas yescribir la misma ecuacion en la forma
A[;] = A[,]. si A = A[] (3.28)
3.1.4.1 Otro ejemplo interesante, que nos tomara un poco de trabajo, es la divergencia covariante.
V; = V
, +
V. (3.29)
Analicemos el coeficiente :
=1
2g(g, + g, + g,)
=1
2g g (3.30)
Podemos evaluar facilmente este termino, recordando que para cualquier matriz M,
tr ln M(x) = ln det M(x). (3.31)
Si derivamos esta expresion, debido a la linealidad de la traza tenemos
tr
xlnM(x) = tr
M1(x)M(x)
= ln detM(x). (3.32)
y por tanto tenemos, definiendo g | det(g)|
=1
2 ln det(g) =
1
2 ln | det(g)| = ln g = 1
g
g. (3.33)
Combinando esta identidad con la ecuacion (3.29) obtenemos para la divergencia covariante el siguienteresultado
V; = 1g (gV). (3.34)
Una consecuencia inmediata es la definicion del Laplaciano en coordenadas curvas. Si es una funcionentonces
g;; = ;; =1
g(
g,). (3.35)
3.1.4.2 Una consecuencia interesante es la forma covariante del Teorema de Gauss: Si V se anulaen el infinito, entonces:
d4x
g V; =
d4x (
g V), = 0. (3.36)
Igualmente facil es demostrar una formula general para la integracion por partes
d4xg T1...r 1...s; P1...r1...s = d4xg T1...r1...s P1...r1...s; (3.37)siempre que alguno de los dos tensores se anule en el infinito.
La aparicion del factor
g no es accidental. Es el factor necesario para que el elemento de volumend4x
g sea invariante bajo cambios de coordenadas.
3.1.4.3 Por ultimo vamos a simplificar la formula para la divergencia covariante de un tensor derango (0,2).
T; T, + T + T
36
-
7/29/2019 Nota de Gravitacin
38/149
y aplicando la formula (3.33) obtenemos que
T; =1
g
x
(
gT) + T.
En particular si se trata de un tensor antisimetrico, entonces el ultimo termino se cancela y podemosescribir
A; =1
g
x(
gA) ; para A antisimetrico (3.38)
3.1.5. Densidades Tensoriales
Definicion 3.1.3. T1...p1...q son las componentes de una densidad tensorial de peso h si bajocambios de coordenadas se transforman como sigue
T1...
p1...q = (det(
))h
1
1 ...
pp T1...p
1...q 1
1 ...p
p (3.39)
Podemos extender las reglas del algebra tensorial a densidades tensoriales:
(a) La combinacion lineal de dos densidades tensoriales de peso h es una densidad tensorial de pesoh.
(b) El producto directo de dos densidades tensoriales de pesos h1 y h2, es una densidad tensorial depeso h = h1 + h2.
(c) La contraccion de ndices en una densidad tensorial altera el rango pero no el peso.
Las densidades tensoriales de peso h = 0 coinciden con los tensores a secas. Como consecuencia de (b)
tenemos que el hecho de subir o bajar ndices no altera el peso de ninguna densidad tensorial.3.1.5.1
Conocemos el ejemplo de que se transforma como una densidad de peso h = 1
= det(
)1
Esta regla de transformacion asegura que, en todo sistema de coordenadas tiene valores 1 y 0.Analogamente si definimos = 1, 0 en cualquier sistema de coordenadas, debera transformarsecomo una densidad tensorial de peso h = 1.
= det(
)1
= det(
)
(3.40)
3.1.5.2
Otra densidad muy importante es el determinante de la matriz formada con cualquier tensor de rango(0, 2), por ejemplo del tensor metrico
g det g.Al transformar encontramos g det g = det(g) = (det)2g. resultado que tam-bien se puede derivar usando la expresion explcita del determinante
g =1
4!gg gg .
37
-
7/29/2019 Nota de Gravitacin
39/149
En cualquiera de las dos formas, vemos que se trata de una densidad escalar de peso h = 2. Analo-gamente tenemos que
g es una densidad escalar de peso h = 1.
3.1.5.3 Podemos formar un tensor totalmente antisimetrico multiplicando por o por
potencias adecuadas de g
w =
g ; w =
sg
(3.41)
donde s = det g/g es la signatura de la metrica.
Ejercicio 3.1.2. Comprobar que w y w son tensores y que se relacionanmediante la regla usual de subir y bajar ndices con el tensor metrico.
3.1.5.4 Por otra parte sabemos que el elemento de volumen d4x se transforma como una densidad
escalar de peso h = +1, ya que d4x = (det
)d4x. Por lo tanto, el elemento de volumen invariante
bajo transformaciones de coordenadas es
d4x
g = d4x
g. (3.42)
3.2. Curvatura
3.2.1. Metricas y Coordenadas Curvilneas.
Como sabemos, la ecuacion g =
g (3.43)
espresa la transformacion que sufren las componentes del tensor metrico cuando hacemos un cambiode coordenadas arbitrario. Dicho cambio de coordenadas viene especificado mediante un conjunto deD funciones x x(x), tales que det = 0. Supongamos que nos encontramos con un conjuntode componentes de funciones g genericas; vamos a explorar la posibilidad de jugar con la ley (3.43)para encontrar un sistema de coordenadas en el que dichas componentes adopten una forma particular.
(a) Coordenadas Orto-Temporales. En ellas, la coordenada temporal es ortogonal a las dem as. Esdecir, denominando tiempo coordenado a x0
, debe ocurrir que g0i = 0.
g g | g0i = gx
x0x
xi= 0 i = 1, 2, 3 (3.44)
Esto son 3 ecuaciones diferenciales para 4 funciones x(x). Por tanto las coordenadas orto-temporales
ds2 = g00(dx0)2 + gij dx
idxj (3.45)
siempre pueden ser introducidas.
(b) Coordenadas Ortogonales. Son aquellas en las que la metrica tiene apariencia diagonal
ds2 =
D=1
g(dx)2 (3.46)
38
-
7/29/2019 Nota de Gravitacin
40/149
Veamos si es posible el cambio:
g g = g x
xx
x= 0 para = (3.47)
En D dimensiones este es un conjunto de D(D1)/2 ecuaciones diferenciales para las D funcionesx
(x). Por tanto la condicion D(D 1)/2 D solo se cumple para D = 1, 2, 3. Para D 4 engeneral no es posible pasar a coordenadas globalmente ortogonales.
(c) Coordenadas Globalmente Inerciales. En este sistema de coordenadas los coeficientes de la cone-xion afn se anulan en todo el espacio. Consecuentemente la metrica g ha de ser un conjuntode funciones constantes. Un argumento analogo al del caso b) nos dice que en D dimensioneshay que satisfacer el conjunto de D(D + 1)/2 ecuaciones
g g = g x
xx
x, () (3.48)
para lo cual, como de costumbre disponemos de D funciones independientes. D = D(D + 1)/2
solo tiene solucion para D = 1, y por tanto en D = 4 no es posible en general encontrar unsistema de coordenadas globalmente inercial.
(d) Coordenadas Localmente Inerciales. Por definicion, en estas coordenadas, existe un punto dadox0 , en el cual los coeficientes de la conexion de Levi-Civita se anulan. En otras palabras, lascoordenadas en dicho punto coinciden con las que definen el transporte paralelo. La condicionsuficiente es la de que las primeras derivadas de la metrica se anulen. Dicho en otras palabras, lametrica en un entorno diferencial
-
7/29/2019 Nota de Gravitacin
41/149
son 10 4 = 40 ecuaciones dada la simetra en los dos primeros ndices. Para resolverlas dis-ponemos de 40 cantidades de la forma
,(x0) mas las 6 residuales que no fueron fijadas en
.
Podemos preguntarnos donde se trunca el proceso de poner derivadas mas altas de la metricaa cero. Veamos que no es posible ir mas alla de la primera derivada. g,(x0) = 0 es unconjunto de 10 10 = 100 ecuaciones, dada la simetra de las dos parejas de ndices. Parasolucionarlas contamos con 6 variables residuales del tipo
(x0), ninguna de tipo
,(x
0)